КОТАНГЕНС — это… Что такое КОТАНГЕНС?
КОТАНГЕНС — (лат. cotangens, вместо complementi tangens дополнение тангенса). В тригонометрии, тангенс дуги, дополняющей данную дугу. Словарь иностранных слов, вошедших в состав русского языка. Чудинов А.Н., 1910. КОТАНГЕНС в тригонометрии тангенс… … Словарь иностранных слов русского языка
КОТАНГЕНС — КОТАНГЕНС, в ТРИГОНОМЕТРИИ отношение в прямоугольном треугольнике длины стороны, прилежащей к острому углу, к длине стороны, противолежащей этому углу. Котангенс угла А обычно сокращенно обозначают как ctg А. Это величина, обратная тангенсу … Научно-технический энциклопедический словарь
КОТАНГЕНС — (новолат. cotangens от complementi tangens тангенс дополнения), одна из тригонометрических функций … Большой Энциклопедический словарь
КОТАНГЕНС — КОТАНГЕНС, а, муж. (спец.). Тригонометрическая функция, равная отношению косинуса к синусу. Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
КОТАНГЕНС — муж., мат. тангенс дополненья к прямому углу. Толковый словарь Даля. В.И. Даль. 1863 1866 … Толковый словарь Даля
котангенс — сущ., кол во синонимов: 1 • функция (49) Словарь синонимов ASIS. В.Н. Тришин. 2013 … Словарь синонимов
котангенс — тангенс дополнения лат.: cotangens, complementi tangens новолат. лат … Словарь сокращений и аббревиатур
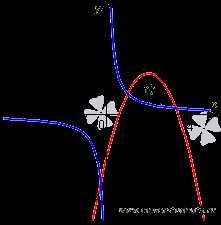
Котангенс — Рис. 1 Графики тригонометрических функций: синуса, косинуса, тангенса, секанса, косеканса, котангенса Тригонометрические функции вид элементарных функций. Обычно к ним относят синус (sin x), косинус (cos x), тангенс (tg x), котангенс (ctg x),… … Википедия
котангенс — (новолат. cotangens, от complementi tangens тангенс дополнения), одна из тригонометрических функций. * * * КОТАНГЕНС КОТАНГЕНС (новолат. cotangens, от complementi tangens тангенс (см. ТАНГЕНС) дополнения), одна из тригонометрических функций (см … Энциклопедический словарь
Котангенс — (новолат. cotangens, сокращение от complementi tangens Тангенс дополнения) одна из тригонометрических функций (См. Тригонометрические функции), обозначение ctg. К. острого угла в прямоугольном треугольнике называется отношение катета,… … Большая советская энциклопедия
dic.academic.ru
КОТАНГЕНС — это… Что такое КОТАНГЕНС?
КОТАНГЕНС — (лат. cotangens, вместо complementi tangens дополнение тангенса). В тригонометрии, тангенс дуги, дополняющей данную дугу. Словарь иностранных слов, вошедших в состав русского языка. Чудинов А.Н., 1910. КОТАНГЕНС в тригонометрии тангенс… … Словарь иностранных слов русского языка
КОТАНГЕНС — КОТАНГЕНС, в ТРИГОНОМЕТРИИ отношение в прямоугольном треугольнике длины стороны, прилежащей к острому углу, к длине стороны, противолежащей этому углу. Котангенс угла А обычно сокращенно обозначают как ctg А. Это величина, обратная тангенсу … Научно-технический энциклопедический словарь
КОТАНГЕНС — (новолат. cotangens от complementi tangens тангенс дополнения), одна из тригонометрических функций … Большой Энциклопедический словарь
КОТАНГЕНС — КОТАНГЕНС, котангенса, муж. (лат. cotangens) (мат.). Тригонометрическая функция тангенс дополнительного угла. Толковый словарь Ушакова. Д.Н. Ушаков. 1935 1940 … Толковый словарь Ушакова
КОТАНГЕНС — КОТАНГЕНС, а, муж. (спец.). Тригонометрическая функция, равная отношению косинуса к синусу. Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
КОТАНГЕНС — муж., мат. тангенс дополненья к прямому углу. Толковый словарь Даля. В.И. Даль. 1863 1866 … Толковый словарь Даля
котангенс — сущ., кол во синонимов: 1 • функция (49) Словарь синонимов ASIS. В.Н. Тришин. 2013 … Словарь синонимов
котангенс — тангенс дополнения лат.: cotangens, complementi tangens новолат. лат … Словарь сокращений и аббревиатур
Котангенс — Рис. 1 Графики тригонометрических функций: синуса, косинуса, тангенса, секанса, косеканса, котангенса Тригонометрические функции вид элементарных функций. Обычно к ним относят синус (sin x), косинус (cos x), тангенс (tg x), котангенс (ctg x),… … Википедия
котангенс — (новолат. cotangens, от complementi tangens тангенс дополнения), одна из тригонометрических функций. * * * КОТАНГЕНС КОТАНГЕНС (новолат. cotangens, от complementi tangens тангенс (см. ТАНГЕНС) дополнения), одна из тригонометрических функций (см … Энциклопедический словарь
Котангенс — (новолат. cotangens, сокращение от complementi tangens Тангенс дополнения) одна из тригонометрических функций (См. Тригонометрические функции), обозначение ctg. К. острого угла в прямоугольном треугольнике называется отношение катета,… … Большая советская энциклопедия
dic.academic.ru
КОТАНГЕНС — это… Что такое КОТАНГЕНС?
КОТАНГЕНС — (лат. cotangens, вместо complementi tangens дополнение тангенса). В тригонометрии, тангенс дуги, дополняющей данную дугу. Словарь иностранных слов, вошедших в состав русского языка. Чудинов А.Н., 1910. КОТАНГЕНС в тригонометрии тангенс… … Словарь иностранных слов русского языка
КОТАНГЕНС — КОТАНГЕНС, в ТРИГОНОМЕТРИИ отношение в прямоугольном треугольнике длины стороны, прилежащей к острому углу, к длине стороны, противолежащей этому углу. Котангенс угла А обычно сокращенно обозначают как ctg А. Это величина, обратная тангенсу … Научно-технический энциклопедический словарь
КОТАНГЕНС — (новолат. cotangens от complementi tangens тангенс дополнения), одна из тригонометрических функций … Большой Энциклопедический словарь
КОТАНГЕНС — КОТАНГЕНС, котангенса, муж. (лат. cotangens) (мат.). Тригонометрическая функция тангенс дополнительного угла. Толковый словарь Ушакова. Д.Н. Ушаков. 1935 1940 … Толковый словарь Ушакова
КОТАНГЕНС — муж., мат. тангенс дополненья к прямому углу. Толковый словарь Даля. В.И. Даль. 1863 1866 … Толковый словарь Даля
котангенс — сущ., кол во синонимов: 1 • функция (49) Словарь синонимов ASIS. В.Н. Тришин. 2013 … Словарь синонимов
котангенс — тангенс дополнения лат.: cotangens, complementi tangens новолат. лат … Словарь сокращений и аббревиатур
Котангенс — Рис. 1 Графики тригонометрических функций: синуса, косинуса, тангенса, секанса, косеканса, котангенса Тригонометрические функции вид элементарных функций. Обычно к ним относят синус (sin x), косинус (cos x), тангенс (tg x), котангенс (ctg x),… … Википедия
котангенс — (новолат. cotangens, от complementi tangens тангенс дополнения), одна из тригонометрических функций. * * * КОТАНГЕНС КОТАНГЕНС (новолат. cotangens, от complementi tangens тангенс (см. ТАНГЕНС) дополнения), одна из тригонометрических функций (см … Энциклопедический словарь
Котангенс — (новолат. cotangens, сокращение от complementi tangens Тангенс дополнения) одна из тригонометрических функций (См. Тригонометрические функции), обозначение ctg. К. острого угла в прямоугольном треугольнике называется отношение катета,… … Большая советская энциклопедия
dic.academic.ru
Tg — это… Что такое Tg?
Рис. 1
Графики тригонометрических функций: синуса, косинуса, тангенса, секанса, косеканса, котангенса
Тригонометрические функции — вид элементарных функций. Обычно к ним относят синус (sin x), косинус (cos x), тангенс (tg x), котангенс (ctg x), секанс (sec x) и косеканс (cosec x), последняя пара функций в настоящее время сравнительно малоупотребительна (про ещё менее употребляемые функции см. здесь). В англоязычной литературе тангенс, котангенс и косеканс обозначаются tan x, cot x, csc x. Обычно тригонометрические функции определяются геометрически, но можно определить их аналитически через суммы рядов или как решения некоторых дифференциальных уравнений, что позволяет расширить область определения этих функций на комплексные числа.
Способы определения
Геометрическое определение
Рис. 2
Определение тригонометрических функций
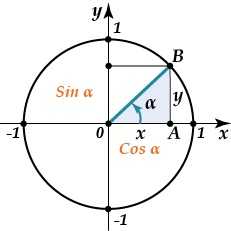
Обычно тригонометрические функции определяются геометрически. Пусть дана декартова система координат на плоскости и построена окружность радиуса R с центром в начале координат O. Будем измерять углы как повороты от положительного направления оси абсцисс до луча OB. Направление против часовой стрелки считается положительным, по часовой стрелке отрицательным. Абсциссу точки В обозначим xB, ординату обозначим yB (см. рисунок.)
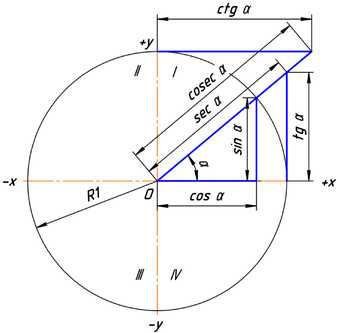
Рис. 3.
Тригонометрические функции угла α в тригонометрической окружности с радиусом, равным единице.
Ясно, что значения тригонометрических функций не зависят от величины радиуса окружности R в силу свойств подобных фигур. Часто этот радиус принимают равным величине единичного отрезка, тогда синус равен просто ординате yB, а косинус — абсциссе xB. На рисунке 3 показаны величины тригонометрических функций для единичной окружности.
Если α — действительное число, то синусом α в математическом анализе называется синус угла, радианная мера которого равна α, аналогично для прочих тригонометрических функций.
Определение тригонометрических функций для острых углов
Рис. 4.
Тригонометрические функции острого угла
Во многих учебниках элементарной геометрии до настоящего времени тригонометрические функции острого угла определяются как отношения сторон прямоугольного треугольника. Пусть OAB — треугольник с углом α. Тогда:
- Синусом α называется отношение AB/OB (противолежащего катета к гипотенузе)
- Косинусом α называется отношение ОА/OB (прилежащего катета к гипотенузе)
- Тангенсом α называется отношение AB/OA (отношение противолежащего катета к прилежащему)
- Котангенсом α называется отношение ОА/AB (отношение прилежащего катета к противолежащему)
- Секансом α называется отношение ОB/OA (гипотенузы к прилежащему катету)
- Косекансом α называется отношение ОB/AB (гипотенузы к противолежащему катету)
Построив систему координат с началом в точке O, направлением оси абсцисс вдоль OA и в случае необходимости изменив ориентацию (перевернув) треугольник так, чтобы он находился в первой четверти системы координат, и затем, построив окружность с радиусом, равным гипотенузе, сразу находим, что такое определение функций приводит к тому же результату, что и предыдущее. Данное определение имеет некоторое педагогическое преимущество, так как не требует введения понятия системы координат, но также и такой крупный недостаток, что невозможно определить тригонометрические функции даже для тупых углов, которые необходимо знать при решении элементарных задач про тупоугольные треугольники (см. Теорема синусов, Теорема косинусов).
Определение тригонометрических функций как решений дифференциальных уравнений
Функции косинус и синус можно определить как чётное (косинус) и нечётное (синус) решение дифференциального уравнения
с начальными условиями cos(0) = sin'(0) = 1, то есть как функций одной переменной, вторая производная которых равна самой функции, взятой со знаком минус:
Определение тригонометрических функций как решений функциональных уравнений
Функции косинус и синус можно определить как непрерывные решения (f и g соответственно) системы функциональных уравнений:
Определение тригонометрических функций через ряды
Используя геометрию и свойства пределов, можно доказать, что производная синуса равна косинусу и что производная косинуса равна минус синусу. Тогда можно воспользоваться теорией рядов Тейлора и представить синус и косинус в виде суммы степенны́х рядов:
Пользуясь этими формулами, а также уравнениями и можно найти разложения в ряд Тейлора и других тригонометрических функций:
- где Bn — числа Бернулли.
- где En — числа Эйлера.
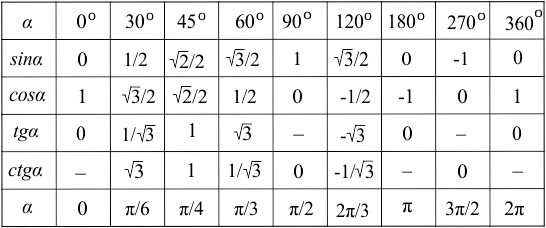
Значения тригонометрических функций для некоторых углов
Значения синуса, косинуса, тангенса, котангенса, секанса и косеканса для некоторых углов приведены в таблице.

Значения косинуса и синуса на окружности.
Значения тригонометрических функций нестандартных углов
Свойства тригонометрических функций
Простейшие тождества
Так как синус и косинус являются соответственно ординатой и абсциссой точки, соответствующей на единичной окружности углу α то, согласно уравнению единичной окружности или теореме Пифагора, имеем:
Деля это уравнение на квадрат косинуса и синуса соответственно имеем далее:
Чётность
Косинус и секанс — чётные. Остальные четыре функции — нечётные, то есть:
Периодичность
Функции y = sin α, y = cos α, y = sec α, y = cosec α — периодические с периодом 2π. Функции: y = tg α, y = ctg α — c периодом π
Формулы приведения
Здесь f — любая тригонометрическая функция, g — соответствующая ей другая функция из пары (то есть косинус для синуса, синус для косинуса и аналогично для остальных функций). Нужный знак в правой части равенства определяется следующим образом: предположим что угол α находится в первой четверти, тогда определяем знаки значений функций в левой и правой части равенства и в случае их несовпадения перед правой частью пишем знак -, например:
Формулы сложения
Другие тригонометрические тождества.
Однопараметрическое представление
Все тригонометрические функции можно выразить через тангенс половинного угла.
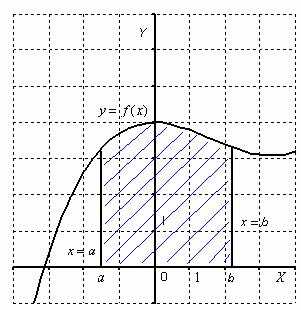
Производные и интегралы
Все тригонометрические функции непрерывно дифференцируемы на всей области определения:
Интегралы тригонометрических функций на области определения выражаются через элементарные функции следующим образом:
- См. также Список интегралов от тригонометрических функций
История
Линия синуса у индийских математиков первоначально называлась «арха-джива» («полутетива»), затем слово «арха» было отброшено и линию синуса стали называть просто «джива». Арабские переводчики не перевели слово «джива» арабским словом «ватар», обозначающим тетиву и хорду, а транскрибировали арабскими буквами и стали называть линию синуса «джиба». Так как в арабском языке краткие гласные не обозначаются, а долгое «и» в слове «джиба» обозначается так же, как полугласная «й», арабы стали произносить название линии синуса «джайб», что буквально обозначает «впадина», «пазуха». При переводе арабских сочинений на латынь европейские переводчики перевели слово «джайб» латинским словом sinus, имеющим то же значение.
Современное обозначение синуса sin и косинуса cos введено Леонардом Эйлером в XVIII веке.
Термины «тангенс» (от лат. tangens — касающийся) и «секанс» (лат. secans — секущий) были введены датским математиком Томасом Финке (1561—1656) в его книге «Геометрия круглого» (Geometria rotundi, 1583)
Сам термин тригонометрические функции введён Клюгелем в 1770.
См. также
Ссылки
Wikimedia Foundation. 2010.
dic.academic.ru
Котангенс — это… Что такое Котангенс?
КОТАНГЕНС — (лат. cotangens, вместо complementi tangens дополнение тангенса). В тригонометрии, тангенс дуги, дополняющей данную дугу. Словарь иностранных слов, вошедших в состав русского языка. Чудинов А.Н., 1910. КОТАНГЕНС в тригонометрии тангенс… … Словарь иностранных слов русского языка
КОТАНГЕНС — КОТАНГЕНС, в ТРИГОНОМЕТРИИ отношение в прямоугольном треугольнике длины стороны, прилежащей к острому углу, к длине стороны, противолежащей этому углу. Котангенс угла А обычно сокращенно обозначают как ctg А. Это величина, обратная тангенсу … Научно-технический энциклопедический словарь
КОТАНГЕНС — (новолат. cotangens от complementi tangens тангенс дополнения), одна из тригонометрических функций … Большой Энциклопедический словарь
КОТАНГЕНС — КОТАНГЕНС, котангенса, муж. (лат. cotangens) (мат.). Тригонометрическая функция тангенс дополнительного угла. Толковый словарь Ушакова. Д.Н. Ушаков. 1935 1940 … Толковый словарь Ушакова
КОТАНГЕНС — КОТАНГЕНС, а, муж. (спец.). Тригонометрическая функция, равная отношению косинуса к синусу. Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
КОТАНГЕНС — муж., мат. тангенс дополненья к прямому углу. Толковый словарь Даля. В.И. Даль. 1863 1866 … Толковый словарь Даля
котангенс — сущ., кол во синонимов: 1 • функция (49) Словарь синонимов ASIS. В.Н. Тришин. 2013 … Словарь синонимов
котангенс — тангенс дополнения лат.: cotangens, complementi tangens новолат. лат … Словарь сокращений и аббревиатур
Котангенс — Рис. 1 Графики тригонометрических функций: синуса, косинуса, тангенса, секанса, косеканса, котангенса Тригонометрические функции вид элементарных функций. Обычно к ним относят синус (sin x), косинус (cos x), тангенс (tg x), котангенс (ctg x),… … Википедия
котангенс — (новолат. cotangens, от complementi tangens тангенс дополнения), одна из тригонометрических функций. * * * КОТАНГЕНС КОТАНГЕНС (новолат. cotangens, от complementi tangens тангенс (см. ТАНГЕНС) дополнения), одна из тригонометрических функций (см … Энциклопедический словарь
dic.academic.ru
КОТАНГЕНС — это… Что такое КОТАНГЕНС?
КОТАНГЕНС — (лат. cotangens, вместо complementi tangens дополнение тангенса). В тригонометрии, тангенс дуги, дополняющей данную дугу. Словарь иностранных слов, вошедших в состав русского языка. Чудинов А.Н., 1910. КОТАНГЕНС в тригонометрии тангенс… … Словарь иностранных слов русского языка
КОТАНГЕНС — КОТАНГЕНС, в ТРИГОНОМЕТРИИ отношение в прямоугольном треугольнике длины стороны, прилежащей к острому углу, к длине стороны, противолежащей этому углу. Котангенс угла А обычно сокращенно обозначают как ctg А. Это величина, обратная тангенсу … Научно-технический энциклопедический словарь
КОТАНГЕНС — КОТАНГЕНС, котангенса, муж. (лат. cotangens) (мат.). Тригонометрическая функция тангенс дополнительного угла. Толковый словарь Ушакова. Д.Н. Ушаков. 1935 1940 … Толковый словарь Ушакова
КОТАНГЕНС — КОТАНГЕНС, а, муж. (спец.). Тригонометрическая функция, равная отношению косинуса к синусу. Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
КОТАНГЕНС — муж., мат. тангенс дополненья к прямому углу. Толковый словарь Даля. В.И. Даль. 1863 1866 … Толковый словарь Даля
котангенс — сущ., кол во синонимов: 1 • функция (49) Словарь синонимов ASIS. В.Н. Тришин. 2013 … Словарь синонимов
котангенс — тангенс дополнения лат.: cotangens, complementi tangens новолат. лат … Словарь сокращений и аббревиатур
Котангенс — Рис. 1 Графики тригонометрических функций: синуса, косинуса, тангенса, секанса, косеканса, котангенса Тригонометрические функции вид элементарных функций. Обычно к ним относят синус (sin x), косинус (cos x), тангенс (tg x), котангенс (ctg x),… … Википедия
котангенс — (новолат. cotangens, от complementi tangens тангенс дополнения), одна из тригонометрических функций. * * * КОТАНГЕНС КОТАНГЕНС (новолат. cotangens, от complementi tangens тангенс (см. ТАНГЕНС) дополнения), одна из тригонометрических функций (см … Энциклопедический словарь
Котангенс — (новолат. cotangens, сокращение от complementi tangens Тангенс дополнения) одна из тригонометрических функций (См. Тригонометрические функции), обозначение ctg. К. острого угла в прямоугольном треугольнике называется отношение катета,… … Большая советская энциклопедия
dic.academic.ru
котангенс — это… Что такое котангенс?
КОТАНГЕНС — (лат. cotangens, вместо complementi tangens дополнение тангенса). В тригонометрии, тангенс дуги, дополняющей данную дугу. Словарь иностранных слов, вошедших в состав русского языка. Чудинов А.Н., 1910. КОТАНГЕНС в тригонометрии тангенс… … Словарь иностранных слов русского языка
КОТАНГЕНС — КОТАНГЕНС, в ТРИГОНОМЕТРИИ отношение в прямоугольном треугольнике длины стороны, прилежащей к острому углу, к длине стороны, противолежащей этому углу. Котангенс угла А обычно сокращенно обозначают как ctg А. Это величина, обратная тангенсу … Научно-технический энциклопедический словарь
КОТАНГЕНС — (новолат. cotangens от complementi tangens тангенс дополнения), одна из тригонометрических функций … Большой Энциклопедический словарь
КОТАНГЕНС — КОТАНГЕНС, котангенса, муж. (лат. cotangens) (мат.). Тригонометрическая функция тангенс дополнительного угла. Толковый словарь Ушакова. Д.Н. Ушаков. 1935 1940 … Толковый словарь Ушакова
КОТАНГЕНС — КОТАНГЕНС, а, муж. (спец.). Тригонометрическая функция, равная отношению косинуса к синусу. Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
КОТАНГЕНС — муж., мат. тангенс дополненья к прямому углу. Толковый словарь Даля. В.И. Даль. 1863 1866 … Толковый словарь Даля
котангенс — сущ., кол во синонимов: 1 • функция (49) Словарь синонимов ASIS. В.Н. Тришин. 2013 … Словарь синонимов
котангенс — тангенс дополнения лат.: cotangens, complementi tangens новолат. лат … Словарь сокращений и аббревиатур
Котангенс — Рис. 1 Графики тригонометрических функций: синуса, косинуса, тангенса, секанса, косеканса, котангенса Тригонометрические функции вид элементарных функций. Обычно к ним относят синус (sin x), косинус (cos x), тангенс (tg x), котангенс (ctg x),… … Википедия
котангенс — (новолат. cotangens, от complementi tangens тангенс дополнения), одна из тригонометрических функций. * * * КОТАНГЕНС КОТАНГЕНС (новолат. cotangens, от complementi tangens тангенс (см. ТАНГЕНС) дополнения), одна из тригонометрических функций (см … Энциклопедический словарь
Котангенс — (новолат. cotangens, сокращение от complementi tangens Тангенс дополнения) одна из тригонометрических функций (См. Тригонометрические функции), обозначение ctg. К. острого угла в прямоугольном треугольнике называется отношение катета,… … Большая советская энциклопедия
dic.academic.ru

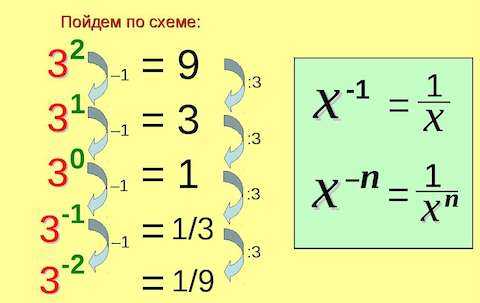 Показатель степени числа может быть меньше 0, т.е, отрицательным числом. Число с отрицательной степенью считается по формуле:
Показатель степени числа может быть меньше 0, т.е, отрицательным числом. Число с отрицательной степенью считается по формуле:


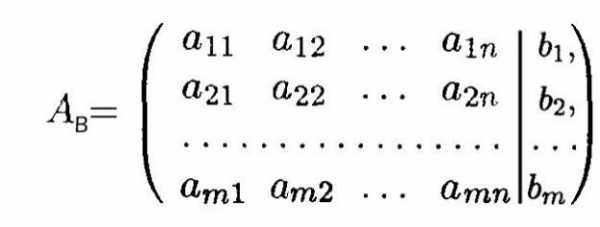
 линейных уравнений с
линейных уравнений с неизвестными:
неизвестными:
 невырожденная.
Тогда, по теореме 3.1,
существует обратная матрица
невырожденная.
Тогда, по теореме 3.1,
существует обратная матрица Помножив матричное уравнениена матрицу
Помножив матричное уравнениена матрицу слева, воспользовавшись определением
3.2, а также утверждением 8) теоремы 1.1,
получим формулу, на которой основан
матричный метод решения систем линейных
уравнений:
слева, воспользовавшись определением
3.2, а также утверждением 8) теоремы 1.1,
получим формулу, на которой основан
матричный метод решения систем линейных
уравнений:


 составим одним из методов, описанных в
пункте 3.
составим одним из методов, описанных в
пункте 3.

 линейных уравнений с
линейных уравнений с неизвестными
неизвестными
 определитель
матрицы, полученной из основной матрицы
определитель
матрицы, полученной из основной матрицы системы уравнений заменой её
системы уравнений заменой её го
столбца столбцом свободных членов.
го
столбца столбцом свободных членов.

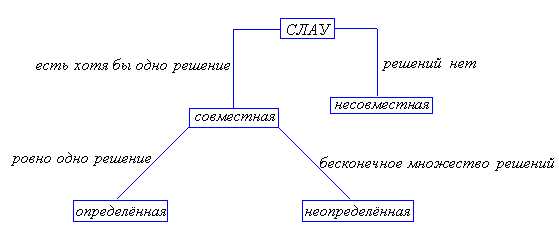
 система несовместна;
система несовместна; система совместна, причём, если,
система
определённая; если же,
система неопределённая.
система совместна, причём, если,
система
определённая; если же,
система неопределённая.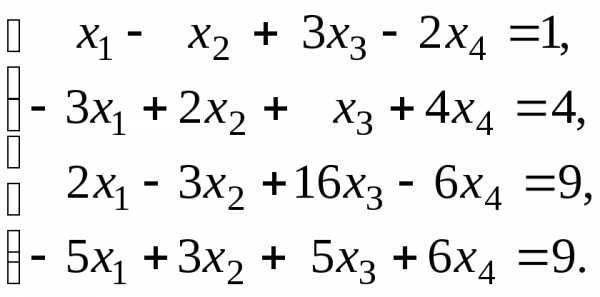
 и расширенной матриц
и расширенной матриц данной системы уравнений, для чего
приведём расширенную (а вместе с тем и
основную) матрицу системы к ступенчатому
виду:
данной системы уравнений, для чего
приведём расширенную (а вместе с тем и
основную) матрицу системы к ступенчатому
виду:
 третью строку – с первой строкой,
умноженной на
третью строку – с первой строкой,
умноженной на а четвёртую строку – с первой, умноженной
на
а четвёртую строку – с первой, умноженной
на получим матрицу
получим матрицу
 а к четвёртой строке – первую, умноженную
на
а к четвёртой строке – первую, умноженную
на В результате получим матрицу
В результате получим матрицу
 и
и являются главными, а неизвестные
являются главными, а неизвестные и
и свободными. Придавая свободным неизвестным
нулевые значения, получим базисное
решение данной системы линейных
уравнений:
свободными. Придавая свободным неизвестным
нулевые значения, получим базисное
решение данной системы линейных
уравнений:


 .
.