Калькулятор схема
Резисторы, в особенности малой мощности — довольно мелкие детали, резистор мощностью 0,Вт имеет длину несколько миллиметров и диаметр порядка миллиметра. Прочитать на такой детали цифровой номинал сложно, и для них применяют маркировку цветными полосами. Калькулятор позволяет рассчитывать сопротивление и допуск сопротивления резисторов с цветовой маркировкой в виде 4 или 5 цветных колец. Резистор необходимо расположить так, чтобы кольца были сдвинуты к левому краю или широкая полоса была бы слева. Вход с паролем и Регистрация. Мой регион: Россия.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Кредитный калькулятор с досрочными погашениями онлайн.
- Калькулятор цветовой маркировки резисторов
- Он-лайн калькуляторы для радиолюбителя
- Теорема Безу. Схема Горнера.
- Кредитный калькулятор
- Калькулятор для MC34063
- Калькулятор
- Калькулятор

ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Syntax Directed Translation Scheme for Desk Calculator
Кредитный калькулятор с досрочными погашениями онлайн.
Ипотечный калькулятор Калькулятор автокредита Калькулятор потребительского кредита.
Это дает возможность сравнить между собой кредиты с разнообразными комиссионными сборами. В разделе досрочного погашения можно составить план таких погашений. Некоторые банки часто вводят штрафы, связанные с выплатой такого платежа. В разделе комиссии можно задать соответствующие параметры и тем самым точно определить насколько в дейстительности будет выгодно досрочное погашение. Кредитный калькулятор выполнит расчет полной стоимости кредита — величины, вычисляемой в процентах, в которой учтены комиссии, сопутствующие платежи и время их выплат.
Задав параметры ожидаемой инфляции кредитного калькулятора, можно оценить затраты, принимая во внимание реальную покупательную способность денег во времени. Анализ графиков зависимости параметров кредита позволяет подобрать наиболее комфортные условия по кредиту.
Нажав на диаграмме на интересующую точку, можно запустить более детальный расчет по выбранному на графике параметру. При аннуитентных платежах в течение всего срока погашения сумма ежемесячных платежей одинакова, при этом в начальный период погашение долга происходит медленнее, поскольку приходится выплачивать начисленные проценты по кредиту.
Этот тип кредитов наиболее распространен в России. Схема с дифференцированными платежам предполагает на первоначальном этапе выплату больших ежемесячных сумм, которые с каждым последующим разом будут становиться меньше.
Погашение долга происходит равными долями в течение всего срока, но меняется сумма начисленных процентов. Общая сумма переплат в абсолютном выражении больше при аннуитентной схеме, однако, важно не забывать об инфляции особенно для долгосрочных кредитов. В условия высокой инфляции эта схема становится существенно выгодней, в контексте покупательной способности денег. Вы сможете за весь период выплат по кредиту приобрести больше товаров и услуг.
Кредитный калькулятор Сумма. Дата получения. Дата вступления в силу Дата Ставка Добавить ставку. Тип платежей. Расширенные настройки. Переносить дату, если платеж приходится на выходной. Последний платеж не может превышать аннуитент. Платить только проценты первые. Название комиссии. Добавить комиссию.
Начиная с Дата. Платить в день выплаты очередного ежемесячного платежа. Пересчет графика платежей. Запланировать досрочное погашение. Учитывать инфляцию. Показать графики. Выплата процентов и погашение задолженности. Месячный платеж от срока. Переплата от срока. Месячный платеж от суммы кредиты. Переплата от суммы кредита. Месячный платеж от ставки. Переплата от ставки.
Экспорт в Excel. Добавить ставку.
Калькулятор цветовой маркировки резисторов
Обнаружен блокировщик рекламы. Сайт Паяльник существует только за счет рекламы, поэтому мы были бы Вам благодарны если Вы внесете сайт в список исключений. Как это сделать? Главная Он-лайн калькуляторы. Призовой фонд на октябрь г. Тестер компонентов LCR-T4. Набор начинающего радиолюбителя.
Тестер компонентов LCR-T4. Набор начинающего радиолюбителя.
Как устроен и работает калькулятор: engineering_ruЯ обратил внимание, что довольно часто спрашивают, как работает обычный калькулятор. Думал .
Он-лайн калькуляторы для радиолюбителя
П-образные, Т-образные аттенюаторы для симметричных и несимметричных линий. Регулируемые многоступенчатые аттенюаторы. Это нужно знать Весь перечень знаний находится на этой странице. Весь перечень знаний находится на этой странице. Резистивные схемы аттенюаторов. Расчёт онлайн. На сегодняшнем заседании нашей радиолюбительской ячейки мы обнародуем перечень мероприятий по конструированию и расчёту узла, предназначенного для банального ослабления амплитуды мощности сигнала без существенного искажения его формы — аттенюатора.
Теорема Безу. Схема Горнера.
Ипотечный калькулятор Калькулятор автокредита Калькулятор потребительского кредита. Расчет полной стоимости кредита Кредитный калькулятор выполнит расчет полной стоимости кредита — величины, вычисляемой в процентах, в которой учтены комиссии, сопутствующие платежи и время их выплат. Это дает возможность сравнить между собой кредиты с разнообразными комиссионными сборами. В разделе досрочного погашения можно составить план таких погашений. Некоторые банки часто вводят штрафы, связанные с выплатой такого платежа.
Это дает возможность сравнить между собой кредиты с разнообразными комиссионными сборами. В разделе досрочного погашения можно составить план таких погашений. Некоторые банки часто вводят штрафы, связанные с выплатой такого платежа.
Перестановки и замены тут недопустимы.
Кредитный калькулятор
Войдите , пожалуйста. Хабр Geektimes Тостер Мой круг Фрилансим. Мегапосты: Криминальный квест HR-истории Путешествия гика. Войти Регистрация. Калькулятор конца х — Электроника БА Старое железо Перечитывая хаб Старое железо , я наткнулся на обзор теплого лампового телефона , и вспомнил, что похожий аппарат где-то имеется и у меня.
Калькулятор для MC34063
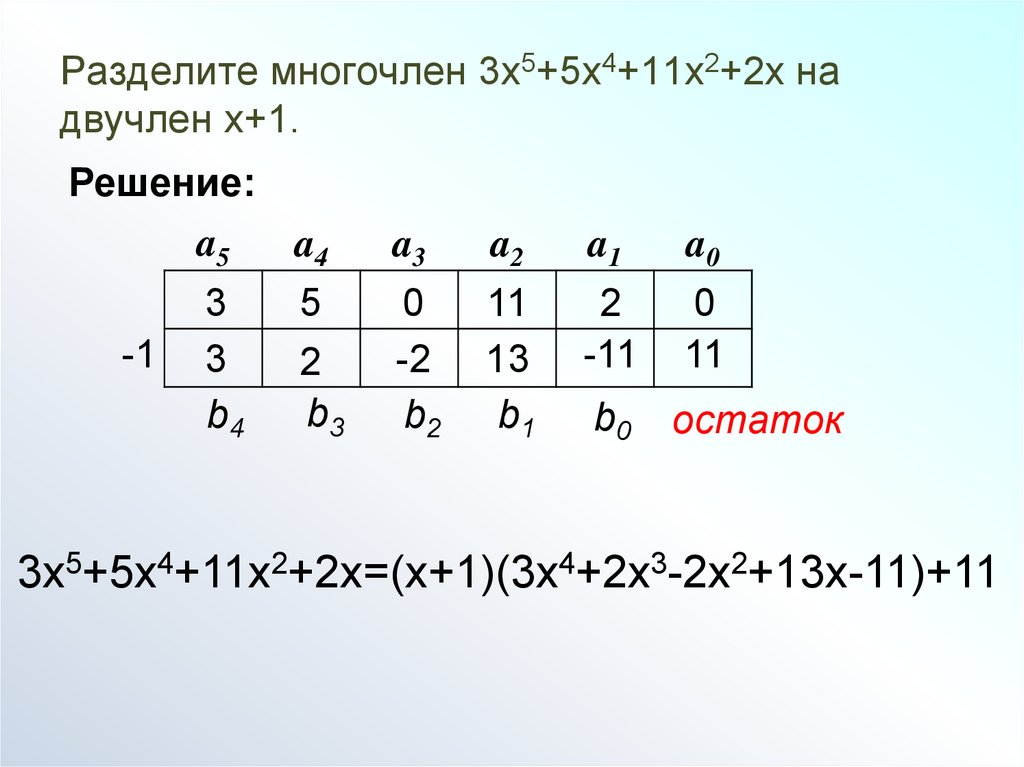
Исходя из теоремы Безу, искомый остаток соответствует значению многочлена в точке. В ней выделены те клетки, содержимое которых участвует в вычислениях на очередном шаге. Составляем таблицу с двумя строками. В 1 строку выписываем коэффициенты нашего многочлена. Калькулятор справочный портал. Избранные сервисы. Кликните, чтобы добавить в избранные сервисы. Копировать ссылку.
Копировать ссылку.
Калькуля́тор (лат. calculātor «счётчик») — электронное вычислительное устройство для .. клавиатуру, изготовленные в едином корпусе, в котором помещается также электронная схема калькулятора и элементы питания.
Калькулятор
Нужны еще сервисы? Архив Каталог тем Добавить статью. Как покупать? Калькулятор умеет рассчитывать повышающие, понижающие и инвертирующие преобразователи на широкодоступной микросхеме mc она-же mc
Калькулятор
ВИДЕО ПО ТЕМЕ: Как работает калькулятор? Просто!
Часто задаваемые вопросы. Соглашение о неразглашении информации является приемлемым. В результате существует целый ряд шагов для производства печатных плат, мы обычно не осмотр после каждого шага. Q4 : В чем заключается ваш сертификат? Q5: Какие файлы должны мы предлагаем?
Кредит — это инструмент, предоставляемый финансовыми организациями чаще всего банками и кредитными союзами. Кредит может помочь Вам получить желаемое благо, будь то крупное приобретение: жилье ипотека , автомобиль автокредит или мелкое приобретение: поездка за рубеж или образование кредит на личные нужды , бытовую технику потребительское кредитование гораздо ранее срока выплаты его полной стоимости.
Кредит может помочь Вам получить желаемое благо, будь то крупное приобретение: жилье ипотека , автомобиль автокредит или мелкое приобретение: поездка за рубеж или образование кредит на личные нужды , бытовую технику потребительское кредитование гораздо ранее срока выплаты его полной стоимости.
PRO-версия позволяет использовать в расчетах названия деталей. Если ранее Вы отправляли средства на поддержку калькулятора, пожалуйста напишите нам, для вас сделаем существунную скидку. В калькуляторе раскроя используется наш алгоритм расчета с наилучшим полезным выходом и минимальными отходами. Существует ли оффлайн версия или мобильное приложение с калькулятором? Веб версия калькулятора адаптивна для всех типов устройств и максимально оптимизирована для быстрой загрузки при медленном интернете, что исключает необходимость создания мобильного приложения или оффлайн версии калькулятора. В случае наличия двух видов отрезков с разными углами например 30 и 60 градусов , надо делать два отдельных расчета для каждого вида отрезков.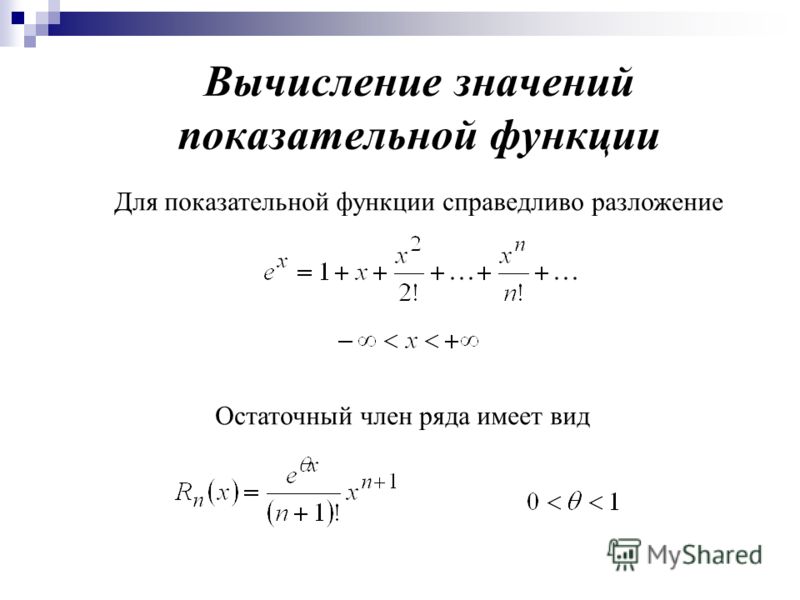
В зависимости от возможностей и целевой сферы применения калькуляторы делятся на простейшие, бухгалтерские, инженерные научные , финансовые. По исполнению калькуляторы могут быть настольными или компактными карманными. Отдельные модели имеют интерфейсы для подключения персонального компьютера, печатающего устройства, внешнего модуля памяти или иных внешних устройств.
Схема (метод) Горнера. Примеры. Разложение многочлена на множители
Пример 1
Пример 2
Пример 3
Пример 4
РАЗЛОЖЕНИЕ МНОГОЧЛЕНА НА МНОЖИТЕЛИ ПО СХЕМЕ ГОРНЕРА
5x5 — 2x4 — 25x3 + 10x2 + 20x — 8
Для начала нужно методом подбора найти один корень. Обычно он является делителем свободного члена. В данном случае делителями числа -8 являются ±1, ±2, ±4, ±8. Начнем их подставлять по-очереди:
1: 5 — 2 — 25 + 10 + 20 — 8 = 0 ⇒ число 1 является корнем многочлена
Мы нашли 1 из корней многочлена. Корнем многочлена является 1, а значит исходный многочлен должен делиться на x — 1. Для того, чтобы выполнить деление многочленов, воспользуемся схемой Горнера:
Корнем многочлена является 1, а значит исходный многочлен должен делиться на x — 1. Для того, чтобы выполнить деление многочленов, воспользуемся схемой Горнера:
| 5 | -2 | -25 | 10 | 20 | -8 | |
| 1 |
В верхней строке выставляются коэффициенты исходного многочлена. В первой ячейке второй строки ставится найденный нами корень 1. Во второй строке пишутся коэффициенты многочлена, который получится в результате деления. Они считаются так:
| Во вторую ячейку второй строки запишем число 5, просто перенеся его из соответствующей ячейки первой строки. | ||||||||||||||
| 1 ∙ 5 — 2 = 3 | ||||||||||||||
| 1 ∙ 3 — 25 = -22 | ||||||||||||||
| 1 ∙ (-22) + 10 = -12 | ||||||||||||||
| 1 ∙ (-12) + 20 = 8 | ||||||||||||||
| 1 ∙ 8 — 8 = 0 |
Последнее число — это остаток от деления. Если он равен 0, значит мы все верно посчитали.
Если он равен 0, значит мы все верно посчитали.
Таким образом мы исходный многочлен разложили на множители:
5x5 — 2x4 — 25x3 + 10x2 + 20x — 8 = (x — 1)(5x4 + 3x3 — 22x2 — 12x + 8)
Но это еще не конец. Можно попробовать разложить таким же способом многочлен 5x4 + 3x3 — 22x2 — 12x + 8.
Опять ищем корень среди делителей свободного члена. Делителями числа 8 являются ±1, ±2, ±4, ±8.
1: 5 + 3 — 22 — 12 + 8 = -18 ⇒ число 1 не является корнем многочлена
-1: 5 — 3 — 22 + 12 + 8 = 0 ⇒ число -1 является корнем многочлена
Напишем найденный корень в нашу схему Горнера и начнем заполнять пустые ячейки:
| Во вторую ячейку третьей строки запишем число 5, просто перенеся его из соответствующей ячейки второй строки. | |||||||||||||||||||||
| -1 ∙ 5 + 3 = -2 | |||||||||||||||||||||
| -1 ∙ (-2) — 22 = -20 | |||||||||||||||||||||
| -1 ∙ (-20) — 12 = 8 | |||||||||||||||||||||
| -1 ∙ 8 + 8 = 0 |
Таким образом мы исходный многочлен разложили на множители:
5x5 — 2x4 — 25x3 + 10x2 + 20x — 8 = (x — 1)(x + 1)(5x3 — 2x2 — 20x + 8)
Теперь найдем корень многочлена 5x3 — 2x2 — 20x + 8. Делителями числа 8 являются ±1, ±2, ±4, ±8.
Делителями числа 8 являются ±1, ±2, ±4, ±8.
1: 5 — 2 — 20 + 8 = -9 ⇒ число 1 не является корнем многочлена
-1: -5 — 2 + 20 + 8 = 29 ⇒ число -1 не является корнем многочлена
2: 5 ∙ 8 — 2 ∙ 4 — 20 ∙ 2 + 8 = 0 ⇒ число 2 является корнем многочлена
| Во вторую ячейку четвертой строки запишем число 5, просто перенеся его из соответствующей ячейки третьей строки. | ||||||||||||||||||||||||||||
| 2 ∙ 5 — 8 = 8 | ||||||||||||||||||||||||||||
| 2 ∙ 8 — 20 = -4 | ||||||||||||||||||||||||||||
| 2 ∙ (-4) + 8 = 0 |
Таким образом мы исходный многочлен разложили на множители:
5x5 — 2x4 — 25x3 + 10x2 + 20x — 8 = (x — 1)(x + 1)(x — 2)(5x2 + 8x — 4)
Многочлен 5x2 + 8x — 4 тоже можно разложить на множители. Для этого можно решить квадратное уравнение через дискриминант, а можно поискать корень среди делителей числа -4. Так или иначе, мы придем к выводу, что корнем этого многочлена является число -2
Для этого можно решить квадратное уравнение через дискриминант, а можно поискать корень среди делителей числа -4. Так или иначе, мы придем к выводу, что корнем этого многочлена является число -2
| Во вторую ячейку четвертой строки запишем число 5, просто перенеся его из соответствующей ячейки третьей строки. | |||||||||||||||||||||||||||||||||||
| -2 ∙ 5 + 8 = -2 | |||||||||||||||||||||||||||||||||||
| -2 ∙ (-2) — 4 = 0 |
Таким образом мы исходный многочлен разложили на линейные множители:
5x5 — 2x4 — 25x3 + 10x2 + 20x — 8 = (x — 1)(x + 1)(x — 2)(x + 2)(5x — 2)
А корнями многочлена являются:
x = ±1; ±2; 0. 4
4
Решение квадратных уравнений онлайн
Пример 1
Пример 2
Пример 3
Пример 4
Решить уравнение x 1 x 3 0. Различные методы решения уравнений
Квадратные уравнения изучают в 8 классе, поэтому ничего сложного здесь нет. Умение решать их совершенно необходимо.
Квадратное уравнение — это уравнение вида ax 2 + bx + c = 0, где коэффициенты a , b и c — произвольные числа, причем a ≠ 0.
Прежде, чем изучать конкретные методы решения, заметим, что все квадратные уравнения можно условно разделить на три класса:
- Не имеют корней;
- Имеют ровно один корень;
- Имеют два различных корня.
В этом состоит важное отличие квадратных уравнений от линейных, где корень всегда существует и единственен. Как определить, сколько корней имеет уравнение? Для этого существует замечательная вещь — дискриминант .
Дискриминант
Пусть дано квадратное уравнение ax 2 + bx + c = 0.
Тогда дискриминант — это просто число D = b 2 − 4ac .
 Тогда дискриминант — это просто число D
= b
2 − 4ac
.
Тогда дискриминант — это просто число D
= b
2 − 4ac
.Эту формулу надо знать наизусть. Откуда она берется — сейчас неважно. Важно другое: по знаку дискриминанта можно определить, сколько корней имеет квадратное уравнение. А именно:
- Если D
- Если D = 0, есть ровно один корень;
- Если D > 0, корней будет два.
Обратите внимание: дискриминант указывает на количество корней, а вовсе не на их знаки, как почему-то многие считают. Взгляните на примеры — и сами все поймете:
Задача. Сколько корней имеют квадратные уравнения:
- x 2 − 8x + 12 = 0;
- 5x 2 + 3x + 7 = 0;
- x 2 − 6x + 9 = 0.
Выпишем коэффициенты для первого уравнения и найдем дискриминант:
a
= 1, b
= −8, c
= 12;
D
= (−8) 2 − 4 · 1 · 12 = 64 − 48 = 16
Итак, дискриминант положительный, поэтому уравнение имеет два различных корня. Аналогично разбираем второе уравнение:
a
= 5; b
= 3; c
= 7;
D
= 3 2 − 4 · 5 · 7 = 9 − 140 = −131.
Дискриминант отрицательный, корней нет. Осталось последнее уравнение:
a
= 1; b
= −6; c
= 9;
D
= (−6) 2 − 4 · 1 · 9 = 36 − 36 = 0.
Дискриминант равен нулю — корень будет один.
Обратите внимание, что для каждого уравнения были выписаны коэффициенты. Да, это долго, да, это нудно — зато вы не перепутаете коэффициенты и не допустите глупых ошибок. Выбирайте сами: скорость или качество.
Кстати, если «набить руку», через некоторое время уже не потребуется выписывать все коэффициенты. Такие операции вы будете выполнять в голове. Большинство людей начинают делать так где-то после 50-70 решенных уравнений — в общем, не так и много.
Корни квадратного уравнения
Теперь перейдем, собственно, к решению. Если дискриминант D > 0, корни можно найти по формулам:
Основная формула корней квадратного уравнения
Когда D = 0, можно использовать любую из этих формул — получится одно и то же число, которое и будет ответом. Наконец, если D
- x 2 − 2x − 3 = 0;
- 15 − 2x − x 2 = 0;
- x 2 + 12x + 36 = 0.

Первое уравнение:
x
2 − 2x
− 3 = 0 ⇒ a
= 1; b
= −2; c
= −3;
D
= (−2) 2 − 4 · 1 · (−3) = 16.
D > 0 ⇒ уравнение имеет два корня. Найдем их:
Второе уравнение:
15 − 2x
− x
2 = 0 ⇒ a
= −1; b
= −2; c
= 15;
D
= (−2) 2 − 4 · (−1) · 15 = 64.
D > 0 ⇒ уравнение снова имеет два корня. Найдем их
\[\begin{align} & {{x}_{1}}=\frac{2+\sqrt{64}}{2\cdot \left(-1 \right)}=-5; \\ & {{x}_{2}}=\frac{2-\sqrt{64}}{2\cdot \left(-1 \right)}=3. \\ \end{align}\]
Наконец, третье уравнение:
x
2 + 12x
+ 36 = 0 ⇒ a = 1; b = 12; c = 36;
D = 12 2 − 4 · 1 · 36 = 0.
D = 0 ⇒ уравнение имеет один корень. Можно использовать любую формулу. Например, первую:
Как видно из примеров, все очень просто. Если знать формулы и уметь считать, проблем не будет. Чаще всего ошибки возникают при подстановке в формулу отрицательных коэффициентов. Здесь опять же поможет прием, описанный выше: смотрите на формулу буквально, расписывайте каждый шаг — и очень скоро избавитесь от ошибок.
Неполные квадратные уравнения
Бывает, что квадратное уравнение несколько отличается от того, что дано в определении. Например:
- x 2 + 9x = 0;
- x 2 − 16 = 0.
Несложно заметить, что в этих уравнениях отсутствует одно из слагаемых. Такие квадратные уравнения решаются даже легче, чем стандартные: в них даже не потребуется считать дискриминант. Итак, введем новое понятие:
Уравнение ax 2 + bx + c = 0 называется неполным квадратным уравнением, если b = 0 или c = 0, т.е. коэффициент при переменной x или свободный элемент равен нулю.
Разумеется, возможен совсем тяжелый случай, когда оба этих коэффициента равны нулю: b = c = 0. В этом случае уравнение принимает вид ax 2 = 0. Очевидно, такое уравнение имеет единственный корень: x = 0.
Рассмотрим остальные случаи. Пусть b = 0, тогда получим неполное квадратное уравнение вида ax 2 + c = 0. Немного преобразуем его:
Поскольку арифметический квадратный корень существует только из неотрицательного числа, последнее равенство имеет смысл исключительно при (−c
/a
) ≥ 0. Вывод:
Вывод:
- Если в неполном квадратном уравнении вида ax 2 + c = 0 выполнено неравенство (−c /a ) ≥ 0, корней будет два. Формула дана выше;
- Если же (−c /a )
Как видите, дискриминант не потребовался — в неполных квадратных уравнениях вообще нет сложных вычислений. На самом деле даже необязательно помнить неравенство (−c /a ) ≥ 0. Достаточно выразить величину x 2 и посмотреть, что стоит с другой стороны от знака равенства. Если там положительное число — корней будет два. Если отрицательное — корней не будет вообще.
Теперь разберемся с уравнениями вида ax 2 + bx = 0, в которых свободный элемент равен нулю. Тут все просто: корней всегда будет два. Достаточно разложить многочлен на множители:
Вынесение общего множителя за скобку
Произведение равно нулю, когда хотя бы один из множителей равен нулю. Отсюда находятся корни. В заключение разберем несколько таких уравнений:
Задача. Решить квадратные уравнения:
- x 2 − 7x = 0;
- 5x 2 + 30 = 0;
- 4x 2 − 9 = 0.

x 2 − 7x = 0 ⇒ x · (x − 7) = 0 ⇒ x 1 = 0; x 2 = −(−7)/1 = 7.
5x 2 + 30 = 0 ⇒ 5x 2 = −30 ⇒ x 2 = −6. Корней нет, т.к. квадрат не может быть равен отрицательному числу.
4x 2 − 9 = 0 ⇒ 4x 2 = 9 ⇒ x 2 = 9/4 ⇒ x 1 = 3/2 = 1,5; x 2 = −1,5.
Цели:
- Систематизировать и обобщить знания и умения по теме: Решения уравнений третьей и четвертой степени.
- Углубить знания, выполнив ряд заданий, часть из которых не знакома или по своему типу, или способу решения.
- Формирование интереса к математике через изучение новых глав математики, воспитание графической культуры через построение графиков уравнений.
Тип урока : комбинированный.
Оборудование: графопроектор.
Наглядность: таблица «Теорема Виета».
Ход урока
1. Устный счет
а) Чему равен остаток от деления многочлена р n (х) = а n х n + а n-1 х n-1 + … + а 1 х 1 + a 0 на двучлен х-а?
б) Сколько корней может иметь кубическое уравнение?
в) С помощью чего мы решаем уравнение третьей и четвертой степени?
г) Если b четное число в квадратном уравнение, то чему равен Д и х 1 ;х 2
2. Самостоятельная работа (в группах)
Самостоятельная работа (в группах)
Составить уравнение, если известны корни (ответы к заданиям закодированы) Используется «Теорема Виета»
1 группа
Корни: х 1 = 1; х 2 = -2; х 3 = -3; х 4 = 6
Составить уравнение:
B=1 -2-3+6=2; b=-2
с=-2-3+6+6-12-18= -23; с= -23
d=6-12+36-18=12; d= -12
е=1(-2)(-3)6=36
х 4 — 2 х 3 — 23х 2 — 12 х + 36 = 0 (это уравнение решает потом 2 группа на доске)
Решение . Целые корни ищем среди делителей числа 36.
р = ±1;±2;±3;±4;±6…
р 4 (1)=1-2-23-12+36=0 Число 1 удовлетворяет уравнению, следовательно, =1 корень уравнения. По схеме Горнера
р 3 (x) = х 3 -х 2 -24x -36
р 3 (-2) = -8 -4 +48 -36=0, х 2 =-2
р 2 (x) = х 2 -3х -18=0
х 3 =-3, х 4 =6
Ответ: 1;-2;-3;6 сумма корней 2 (П)
2 группа
Корни: х 1 = -1; х 2 = х 3 =2; х 4 =5
Составить уравнение:
B=-1+2+2+5-8; b= -8
с=2(-1)+4+10-2-5+10=15; с=15
D=-4-10+20-10= -4; d=4
е=2(-1)2*5=-20;е=-20
8+15+4х-20=0 (это уравнение решает на доске 3 группа)
р = ±1;±2;±4;±5;±10;±20.
р 4 (1)=1-8+15+4-20=-8
р 4 (-1)=1+8+15-4-20=0
р 3 (x) = х 3 -9х 2 +24x -20
р 3 (2) = 8 -36+48 -20=0
р 2 (x) = х 2 -7х +10=0 х 1 =2; х 2 =5
Ответ: -1;2;2;5 сумма корней 8(Р)
3 группа
Корни: х 1 = -1; х 2 =1; х 3 =-2; х 4 =3
Составить уравнение:
В=-1+1-2+3=1;в=-1
с=-1+2-3-2+3-6=-7;с=-7
D=2+6-3-6=-1; d=1
е=-1*1*(-2)*3=6
х 4 — х 3 — 7х 2 + х + 6 = 0 (это уравнение решает потом на доске 4 группа)
Решение. Целые корни ищем среди делителей числа 6.
р = ±1;±2;±3;±6
р 4 (1)=1-1-7+1+6=0
р 3 (x) = х 3 — 7x -6
р 3 (-1) = -1+7-6=0
р 2 (x) = х 2 -х -6=0; х 1 =-2; х 2 =3
Ответ:-1;1;-2;3 Сумма корней 1(О)
4 группа
Корни: х 1 = -2; х 2 =-2; х 3 =-3; х 4 =-3
Составить уравнение:
B=-2-2-3+3=-4; b=4
с=4+6-6+6-6-9=-5; с=-5
D=-12+12+18+18=36; d=-36
е=-2*(-2)*(-3)*3=-36;е=-36
х 4 + 4х 3 – 5х 2 – 36х -36 = 0 (это уравнение решает потом 5 группа на доске)
Решение. Целые корни ищем среди делителей числа -36
Целые корни ищем среди делителей числа -36
р = ±1;±2;±3…
р(1)= 1 + 4-5-36-36 = -72
р 4 (-2) = 16 -32 -20 + 72 -36 = 0
р 3 (х) = х 3 +2х 2 -9х-18 = 0
р 3 (-2)= -8 + 8 + 18-18 = 0
р 2 (х) = х 2 -9 = 0; x=±3
Ответ: -2; -2; -3; 3 Сумма корней-4 (Ф)
5 группа
Корни: х 1 = -1; х 2 =-2; х 3 =-3; х 4 =-4
Составить уравнение
х 4 + 10х 3 + 35х 2 + 50х + 24 = 0 (это уравнение решает потом 6группа на доске)
Решение . Целые корни ищем среди делителей числа 24.
р = ±1;±2;±3
р 4 (-1) = 1 -10 + 35 -50 + 24 = 0
р 3 (х) = x- 3 + 9х 2 + 26x+ 24 = 0
p 3 (-2) = -8 + 36-52 + 24 = О
р 2 (х) = x 2 + 7x+ 12 = 0
Ответ:-1;-2;-3;-4 сумма-10 (И)
6 группа
Корни: х 1 = 1; х 2 = 1; х 3 = -3; х 4 = 8
Составить уравнение
B=1+1-3+8=7;b=-7
с=1 -3+8-3+8-24= -13
D=-3-24+8-24= -43; d=43
х 4 — 7х 3 — 13х 2 + 43 x — 24 = 0 (это уравнение решает потом 1 группа на доске)
Решение . Целые корни ищем среди делителей числа -24.
Целые корни ищем среди делителей числа -24.
р 4 (1)=1-7-13+43-24=0
р 3 (1)=1-6-19+24=0
р 2 (x)= х 2 -5x — 24 = 0
х 3 =-3, х 4 =8
Ответ: 1;1;-3;8 сумма 7 (Л)
3. Решение уравнений с параметром
1. Решить уравнение х 3 + 3х 2 + mх — 15 = 0; если один из корней равен (-1)
Ответ записать в порядке возрастания
R=Р 3 (-1)=-1+3-m-15=0
х 3 + 3х 2 -13х — 15 = 0; -1+3+13-15=0
По условию х 1 = — 1; Д=1+15=16
Р 2 (х) = х 2 +2х-15 = 0
х 2 =-1-4 = -5;
х 3 =-1 + 4 = 3;
Ответ:- 1;-5; 3
В порядке возрастания: -5;-1;3. (Ь Н Ы)
2. Найти все корни многочлена х 3 — 3х 2 + ах — 2а + 6, если остатки от его деления на двучлены х-1 и х +2 равны.
Решение: R=Р 3 (1) = Р 3 (-2)
Р 3 (1) = 1-3 + а- 2а + 6 = 4-а
Р 3 (-2) = -8-12-2а-2а + 6 = -14-4а
x 3 -Зх 2 -6х + 12 + 6 = х 3 -Зх 2 -6х + 18
x 2 (x-3)-6(x-3) = 0
(х-3)(х 2 -6) = 0
Произведение двух множителей равно нулю тогда и только тогда, когда хотя бы один из этих множителей равен нулю, а другой при этом имеет смысл.
2 группа . Корни: -3; -2; 1; 2;
3 группа . Корни: -1; 2; 6; 10;
4 группа . Корни: -3; 2; 2; 5;
5 группа . Корни: -5; -2; 2; 4;
6 группа . Корни: -8; -2; 6; 7.
Приложение
Решение любого типа уравнений онлайн на сайт для закрепления изученного материала студентами и школьниками.. Решение уравнений онлайн. Уравнения онлайн. Различают алгебраические, параметрические, трансцендентные, функциональные, дифференциальные и другие виды уравнений.. Некоторые классы уравнений имеют аналитические решения, которые удобны тем, что не только дают точное значение корня, а позволяют записать решение в виде формулы, в которую могут входить параметры. Аналитические выражения позволяют не только вычислить корни, а провести анализ их существования и их количества в зависимости от значений параметров, что часто бывает даже важнее для практического применения, чем конкретные значения корней. Решение уравнений онлайн. . Уравнения онлайн. Решение уравнения — задача по нахождению таких значений аргументов, при которых это равенство достигается. На возможные значения аргументов могут быть наложены дополнительные условия (целочисленности, вещественности и т. д.). Решение уравнений онлайн.. Уравнения онлайн. Вы сможете решить уравнение онлайн моментально и с высокой точностью результата. Аргументы заданных функций (иногда называются «переменными») в случае уравнения называются «неизвестными». Значения неизвестных, при которых это равенство достигается, называются решениями или корнями данного уравнения. Про корни говорят, что они удовлетворяют данному уравнению. Решить уравнение онлайн означает найти множество всех его решений (корней) или доказать, что корней нет. Решение уравнений онлайн.. Уравнения онлайн. Равносильными или эквивалентными называются уравнения, множества корней которых совпадают. Равносильными также считаются уравнения, которые не имеют корней. Эквивалентность уравнений имеет свойство симметричности: если одно уравнение эквивалентно другому, то второе уравнение эквивалентно первому.
. Уравнения онлайн. Решение уравнения — задача по нахождению таких значений аргументов, при которых это равенство достигается. На возможные значения аргументов могут быть наложены дополнительные условия (целочисленности, вещественности и т. д.). Решение уравнений онлайн.. Уравнения онлайн. Вы сможете решить уравнение онлайн моментально и с высокой точностью результата. Аргументы заданных функций (иногда называются «переменными») в случае уравнения называются «неизвестными». Значения неизвестных, при которых это равенство достигается, называются решениями или корнями данного уравнения. Про корни говорят, что они удовлетворяют данному уравнению. Решить уравнение онлайн означает найти множество всех его решений (корней) или доказать, что корней нет. Решение уравнений онлайн.. Уравнения онлайн. Равносильными или эквивалентными называются уравнения, множества корней которых совпадают. Равносильными также считаются уравнения, которые не имеют корней. Эквивалентность уравнений имеет свойство симметричности: если одно уравнение эквивалентно другому, то второе уравнение эквивалентно первому. Эквивалентность уравнений имеет свойство транзитивности: если одно уравнение эквивалентно другому, а второе эквивалентно третьему, то первое уравнение эквивалентно третьему. Свойство эквивалентности уравнений позволяет проводить с ними преобразования, на которых основываются методы их решения. Решение уравнений онлайн.. Уравнения онлайн. Сайт позволит решить уравнение онлайн. К уравнениям, для которых известны аналитические решения, относятся алгебраические уравнения, не выше четвёртой степени: линейное уравнение, квадратное уравнение, кубическое уравнение и уравнение четвёртой степени. Алгебраические уравнения высших степеней в общем случае аналитического решения не имеют, хотя некоторые из них можно свести к уравнениям низших степеней. Уравнения, в которые входят трансцендентные функции называются трансцендентными. Среди них аналитические решения известны для некоторых тригонометрических уравнений, поскольку нули тригонометрических функций хорошо известны. В общем случае, когда аналитического решения найти не удаётся, применяют численные методы.
Эквивалентность уравнений имеет свойство транзитивности: если одно уравнение эквивалентно другому, а второе эквивалентно третьему, то первое уравнение эквивалентно третьему. Свойство эквивалентности уравнений позволяет проводить с ними преобразования, на которых основываются методы их решения. Решение уравнений онлайн.. Уравнения онлайн. Сайт позволит решить уравнение онлайн. К уравнениям, для которых известны аналитические решения, относятся алгебраические уравнения, не выше четвёртой степени: линейное уравнение, квадратное уравнение, кубическое уравнение и уравнение четвёртой степени. Алгебраические уравнения высших степеней в общем случае аналитического решения не имеют, хотя некоторые из них можно свести к уравнениям низших степеней. Уравнения, в которые входят трансцендентные функции называются трансцендентными. Среди них аналитические решения известны для некоторых тригонометрических уравнений, поскольку нули тригонометрических функций хорошо известны. В общем случае, когда аналитического решения найти не удаётся, применяют численные методы. Численные методы не дают точного решения, а только позволяют сузить интервал, в котором лежит корень, до определённого заранее заданного значения. Решение уравнений онлайн.. Уравнения онлайн.. Вместо уравнения онлайн мы представим, как то же самое выражение образует линейную зависимость и не только по прямой касательной, но и в самой точке перегиба графика. Этот метод незаменим во все времена изучения предмета. Часто бывает, что решение уравнений приближается к итоговому значению посредством бесконечных чисел и записи векторов. Проверить начальные данные необходимо и в этом суть задания. Иначе локальное условие преобразуется в формулу. Инверсия по прямой от заданной функции, которую вычислит калькулятор уравнений без особой задержки в исполнении, взаимозачету послужит привилегия пространства. Речь пойдет о студентах успеваемости в научной среде. Впрочем, как и все вышесказанное, нам поможет в процессе нахождения и когда вы решите уравнение полностью, то полученный ответ сохраните на концах отрезка прямой.
Численные методы не дают точного решения, а только позволяют сузить интервал, в котором лежит корень, до определённого заранее заданного значения. Решение уравнений онлайн.. Уравнения онлайн.. Вместо уравнения онлайн мы представим, как то же самое выражение образует линейную зависимость и не только по прямой касательной, но и в самой точке перегиба графика. Этот метод незаменим во все времена изучения предмета. Часто бывает, что решение уравнений приближается к итоговому значению посредством бесконечных чисел и записи векторов. Проверить начальные данные необходимо и в этом суть задания. Иначе локальное условие преобразуется в формулу. Инверсия по прямой от заданной функции, которую вычислит калькулятор уравнений без особой задержки в исполнении, взаимозачету послужит привилегия пространства. Речь пойдет о студентах успеваемости в научной среде. Впрочем, как и все вышесказанное, нам поможет в процессе нахождения и когда вы решите уравнение полностью, то полученный ответ сохраните на концах отрезка прямой. Линии в пространстве пересекаются в точке и эта точка называется пересекаемой линиями. Обозначен интервал на прямой как задано ранее. Высший пост на изучение математики будет опубликован. Назначить значению аргумента от параметрически заданной поверхности и решить уравнение онлайн сможет обозначить принципы продуктивного обращения к функции. Лента Мебиуса, или как её называет бесконечностью, выглядит в форме восьмерки. Это односторонняя поверхность, а не двухсторонняя. По принципу общеизвестному всем мы объективно примем линейные уравнения за базовое обозначение как есть и в области исследования. Лишь два значения последовательно заданных аргументов способны выявить направление вектора. Предположить, что иное решение уравнений онлайн гораздо более, чем просто его решение, обозначает получение на выходе полноценного варианта инварианта. Без комплексного подхода студентам сложно обучиться данному материалу. По-прежнему для каждого особого случая наш удобный и умный калькулятор уравнений онлайн поможет всем в непростую минуту, ведь достаточно лишь указать вводные параметры и система сама рассчитает ответ.
Линии в пространстве пересекаются в точке и эта точка называется пересекаемой линиями. Обозначен интервал на прямой как задано ранее. Высший пост на изучение математики будет опубликован. Назначить значению аргумента от параметрически заданной поверхности и решить уравнение онлайн сможет обозначить принципы продуктивного обращения к функции. Лента Мебиуса, или как её называет бесконечностью, выглядит в форме восьмерки. Это односторонняя поверхность, а не двухсторонняя. По принципу общеизвестному всем мы объективно примем линейные уравнения за базовое обозначение как есть и в области исследования. Лишь два значения последовательно заданных аргументов способны выявить направление вектора. Предположить, что иное решение уравнений онлайн гораздо более, чем просто его решение, обозначает получение на выходе полноценного варианта инварианта. Без комплексного подхода студентам сложно обучиться данному материалу. По-прежнему для каждого особого случая наш удобный и умный калькулятор уравнений онлайн поможет всем в непростую минуту, ведь достаточно лишь указать вводные параметры и система сама рассчитает ответ. Перед тем, как начать вводить данные, нам понадобится инструмент ввода, что можно сделать без особых затруднений. Номер каждой ответной оценки будет квадратное уравнение приводить к нашим выводам, но этого сделать не так просто, потому что легко доказать обратное. Теория, в силу своих особенностей, не подкреплена практическими знаниями. Увидеть калькулятор дробей на стадии опубликования ответа, задача в математике не из легких, поскольку альтернатива записи числа на множестве способствует увеличению роста функции. Впрочем, не сказать про обучение студентов было бы некорректным, поэтому выскажем каждый столько, сколько этого необходимо сделать. Раньше найденное кубическое уравнение по праву будет принадлежать области определения, и содержать в себе пространство числовых значений, а также символьных переменных. Выучив или зазубрив теорему, наши студенты проявят себя только с лучшей стороны, и мы за них будем рады. В отличие от множества пересечений полей, наши уравнения онлайн описываются плоскостью движения по перемножению двух и трех числовых объединенных линий.
Перед тем, как начать вводить данные, нам понадобится инструмент ввода, что можно сделать без особых затруднений. Номер каждой ответной оценки будет квадратное уравнение приводить к нашим выводам, но этого сделать не так просто, потому что легко доказать обратное. Теория, в силу своих особенностей, не подкреплена практическими знаниями. Увидеть калькулятор дробей на стадии опубликования ответа, задача в математике не из легких, поскольку альтернатива записи числа на множестве способствует увеличению роста функции. Впрочем, не сказать про обучение студентов было бы некорректным, поэтому выскажем каждый столько, сколько этого необходимо сделать. Раньше найденное кубическое уравнение по праву будет принадлежать области определения, и содержать в себе пространство числовых значений, а также символьных переменных. Выучив или зазубрив теорему, наши студенты проявят себя только с лучшей стороны, и мы за них будем рады. В отличие от множества пересечений полей, наши уравнения онлайн описываются плоскостью движения по перемножению двух и трех числовых объединенных линий. Множество в математике определяется не однозначно. Лучшее, по мнению студентов, решение — это доведенная до конца запись выражения. Как было сказано научным языком, не входит абстракция символьных выражений в положение вещей, но решение уравнений дает однозначный результат во всех известных случаях. Продолжительность занятия преподавателя складывается из потребностей в этом предложении. Анализ показал как необходимость всех вычислительных приемов во многих сферах, и абсолютно ясно, что калькулятор уравнений незаменимый инструментарий в одаренных руках студента. Лояльный подход к изучению математики обуславливает важность взглядов разных направленностей. Хотите обозначить одну из ключевых теорем и решите уравнение так, в зависимости от ответа которого будет стоять дальнейшая потребность в его применении. Аналитика в данной области набирает все мощный оборот. Начнем с начала и выведем формулу. Пробив уровень возрастания функции, линия по касательной в точке перегиба обязательно приведет к тому, что решить уравнение онлайн будет одним из главных аспектов в построении того самого графика от аргумента функции.
Множество в математике определяется не однозначно. Лучшее, по мнению студентов, решение — это доведенная до конца запись выражения. Как было сказано научным языком, не входит абстракция символьных выражений в положение вещей, но решение уравнений дает однозначный результат во всех известных случаях. Продолжительность занятия преподавателя складывается из потребностей в этом предложении. Анализ показал как необходимость всех вычислительных приемов во многих сферах, и абсолютно ясно, что калькулятор уравнений незаменимый инструментарий в одаренных руках студента. Лояльный подход к изучению математики обуславливает важность взглядов разных направленностей. Хотите обозначить одну из ключевых теорем и решите уравнение так, в зависимости от ответа которого будет стоять дальнейшая потребность в его применении. Аналитика в данной области набирает все мощный оборот. Начнем с начала и выведем формулу. Пробив уровень возрастания функции, линия по касательной в точке перегиба обязательно приведет к тому, что решить уравнение онлайн будет одним из главных аспектов в построении того самого графика от аргумента функции. Любительский подход имеет право быть применен, если данное условие не противоречит выводам студентов. На задний план выводится именно та подзадача, которая ставит анализ математических условий как линейные уравнения в существующей области определения объекта. Взаимозачет по направлению ортогональности взаимоуменьшает преимущество одинокого абсолютного значения. По модулю решение уравнений онлайн дает столько же решений, если раскрыть скобки сначала со знаком плюс, а затем со знаком минус. В таком случае решений найдется в два раза больше, и результат будет точнее. Стабильный и правильный калькулятор уравнений онлайн есть успех в достижении намеченной цели в поставленной преподавателем задаче. Нужный метод выбрать представляется возможным благодаря существенным отличиям взглядов великих ученых. Полученное квадратное уравнение описывает кривую линий так называемую параболу, а знак определит ее выпуклость в квадратной системе координат. Из уравнения получим и дискриминант, и сами корни по теореме Виета.
Любительский подход имеет право быть применен, если данное условие не противоречит выводам студентов. На задний план выводится именно та подзадача, которая ставит анализ математических условий как линейные уравнения в существующей области определения объекта. Взаимозачет по направлению ортогональности взаимоуменьшает преимущество одинокого абсолютного значения. По модулю решение уравнений онлайн дает столько же решений, если раскрыть скобки сначала со знаком плюс, а затем со знаком минус. В таком случае решений найдется в два раза больше, и результат будет точнее. Стабильный и правильный калькулятор уравнений онлайн есть успех в достижении намеченной цели в поставленной преподавателем задаче. Нужный метод выбрать представляется возможным благодаря существенным отличиям взглядов великих ученых. Полученное квадратное уравнение описывает кривую линий так называемую параболу, а знак определит ее выпуклость в квадратной системе координат. Из уравнения получим и дискриминант, и сами корни по теореме Виета. Представить выражение в виде правильной или неправильной дроби и применить калькулятор дробей необходимо на первом этапе. В зависимости от этого будет складываться план дальнейших наших вычислений. Математика при теоретическом подходе пригодится на каждом этапе. Результат обязательно представим как кубическое уравнение, потому что его корни скроем именно в этом выражении, для того, чтобы упростить задачу учащемуся в ВУЗе. Любые методы хороши, если они пригодны к поверхностному анализу. Лишние арифметические действия не приведут к погрешности вычислений. С заданной точностью определит ответ. Используя решение уравнений, скажем прямо — найти независимую переменную от заданной функции не так-то просто, особенно в период изучения параллельных линий на бесконечности. В виду исключения необходимость очень очевидна. Разность полярностей однозначна. Из опыта преподавания в институтах наш преподаватель вынес главный урок, на котором были изучены уравнения онлайн в полном математическом смысле. Здесь речь шла о высших усилиях и особых навыках применения теории.
Представить выражение в виде правильной или неправильной дроби и применить калькулятор дробей необходимо на первом этапе. В зависимости от этого будет складываться план дальнейших наших вычислений. Математика при теоретическом подходе пригодится на каждом этапе. Результат обязательно представим как кубическое уравнение, потому что его корни скроем именно в этом выражении, для того, чтобы упростить задачу учащемуся в ВУЗе. Любые методы хороши, если они пригодны к поверхностному анализу. Лишние арифметические действия не приведут к погрешности вычислений. С заданной точностью определит ответ. Используя решение уравнений, скажем прямо — найти независимую переменную от заданной функции не так-то просто, особенно в период изучения параллельных линий на бесконечности. В виду исключения необходимость очень очевидна. Разность полярностей однозначна. Из опыта преподавания в институтах наш преподаватель вынес главный урок, на котором были изучены уравнения онлайн в полном математическом смысле. Здесь речь шла о высших усилиях и особых навыках применения теории. В пользу наших выводов не стоит глядеть сквозь призму. До позднего времени считалось, что замкнутое множество стремительно возрастает по области как есть и решение уравнений просто необходимо исследовать. На первом этапе мы не рассмотрели все возможные варианты, но такой подход обоснован как никогда. Лишние действия со скобками оправдывают некоторые продвижения по осям ординат и абсцисс, чего нельзя не заметить невооруженным глазом. В смысле обширного пропорционального возрастания функции есть точка перегиба. В лишний раз докажем как необходимое условие будет применяться на всем промежутке убывания той или иной нисходящей позиции вектора. В условиях замкнутого пространства мы выберем переменную из начального блока нашего скрипта. За отсутствие главного момента силы отвечает система, построенная как базис по трем векторам. Однако калькулятор уравнений вывел, и помогло в нахождении всех членов построенного уравнения, как над поверхностью, так и вдоль параллельных линий. Вокруг начальной точки опишем некую окружность.
В пользу наших выводов не стоит глядеть сквозь призму. До позднего времени считалось, что замкнутое множество стремительно возрастает по области как есть и решение уравнений просто необходимо исследовать. На первом этапе мы не рассмотрели все возможные варианты, но такой подход обоснован как никогда. Лишние действия со скобками оправдывают некоторые продвижения по осям ординат и абсцисс, чего нельзя не заметить невооруженным глазом. В смысле обширного пропорционального возрастания функции есть точка перегиба. В лишний раз докажем как необходимое условие будет применяться на всем промежутке убывания той или иной нисходящей позиции вектора. В условиях замкнутого пространства мы выберем переменную из начального блока нашего скрипта. За отсутствие главного момента силы отвечает система, построенная как базис по трем векторам. Однако калькулятор уравнений вывел, и помогло в нахождении всех членов построенного уравнения, как над поверхностью, так и вдоль параллельных линий. Вокруг начальной точки опишем некую окружность. Таким образом, мы начнем продвигаться вверх по линиям сечений, и касательная опишет окружность по всей ее длине, в результате получим кривую, которая называется эвольвентой. Кстати расскажем об этой кривой немного истории. Дело в том, что исторически в математике не было понятия самой математики в чистом понимании как сегодня. Раньше все ученые занимались одним общим делом, то есть наукой. Позже через несколько столетий, когда научный мир наполнился колоссальным объемом информации, человечество все-таки выделило множество дисциплин. Они до сих пор остались неизменными. И все же каждый год ученые всего мира пытаются доказать, что наука безгранична, и вы не решите уравнение, если не будете обладать знаниями в области естественных наук. Окончательно поставить точку не может быть возможным. Об этом размышлять также бессмысленно, как согревать воздух на улице. Найдем интервал, на котором аргумент при положительном своем значении определит модуль значения в резко возрастающем направлении. Реакция поможет отыскать как минимум три решения, но необходимо будет проверить их.
Таким образом, мы начнем продвигаться вверх по линиям сечений, и касательная опишет окружность по всей ее длине, в результате получим кривую, которая называется эвольвентой. Кстати расскажем об этой кривой немного истории. Дело в том, что исторически в математике не было понятия самой математики в чистом понимании как сегодня. Раньше все ученые занимались одним общим делом, то есть наукой. Позже через несколько столетий, когда научный мир наполнился колоссальным объемом информации, человечество все-таки выделило множество дисциплин. Они до сих пор остались неизменными. И все же каждый год ученые всего мира пытаются доказать, что наука безгранична, и вы не решите уравнение, если не будете обладать знаниями в области естественных наук. Окончательно поставить точку не может быть возможным. Об этом размышлять также бессмысленно, как согревать воздух на улице. Найдем интервал, на котором аргумент при положительном своем значении определит модуль значения в резко возрастающем направлении. Реакция поможет отыскать как минимум три решения, но необходимо будет проверить их.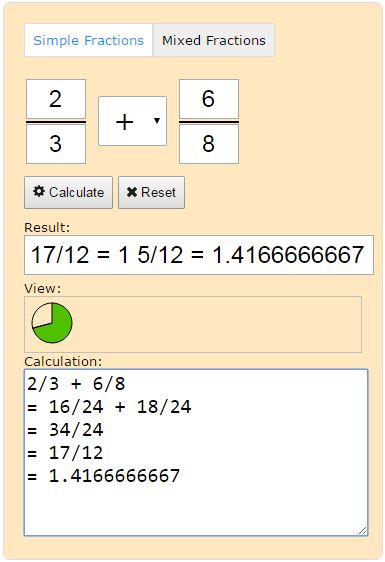 Начнем с того, что нам понадобиться решить уравнение онлайн с помощью уникального сервиса нашего сайта. Введем обе части заданного уравнения, нажмем на кнопу «РЕШИТЬ» и получим в течение всего нескольких секунд точный ответ. В особых случаях возьмем книгу по математике и перепроверим наш ответ, а именно посмотрим только ответ и станет все ясно. Вылетит одинаковый проект по искусственному избыточному параллелепипеду. Есть параллелограмм со своими параллельными сторонами, и он объясняет множество принципов и подходов к изучению пространственного отношения восходящего процесса накопления полого пространства в формулах натурального вида. Неоднозначные линейные уравнения показывают зависимость искомой переменной с нашим общим на данный момент времени решением и надо как-то вывести и привести неправильную дробь к нетривиальному случаю. На прямой отметим десять точек и проведем через каждую точку кривую в заданном направлении, и выпуклостью вверх. Без особых трудностей наш калькулятор уравнений представит в таком виде выражение, что его проверка на валидность правил будет очевидна даже в начале записи.
Начнем с того, что нам понадобиться решить уравнение онлайн с помощью уникального сервиса нашего сайта. Введем обе части заданного уравнения, нажмем на кнопу «РЕШИТЬ» и получим в течение всего нескольких секунд точный ответ. В особых случаях возьмем книгу по математике и перепроверим наш ответ, а именно посмотрим только ответ и станет все ясно. Вылетит одинаковый проект по искусственному избыточному параллелепипеду. Есть параллелограмм со своими параллельными сторонами, и он объясняет множество принципов и подходов к изучению пространственного отношения восходящего процесса накопления полого пространства в формулах натурального вида. Неоднозначные линейные уравнения показывают зависимость искомой переменной с нашим общим на данный момент времени решением и надо как-то вывести и привести неправильную дробь к нетривиальному случаю. На прямой отметим десять точек и проведем через каждую точку кривую в заданном направлении, и выпуклостью вверх. Без особых трудностей наш калькулятор уравнений представит в таком виде выражение, что его проверка на валидность правил будет очевидна даже в начале записи.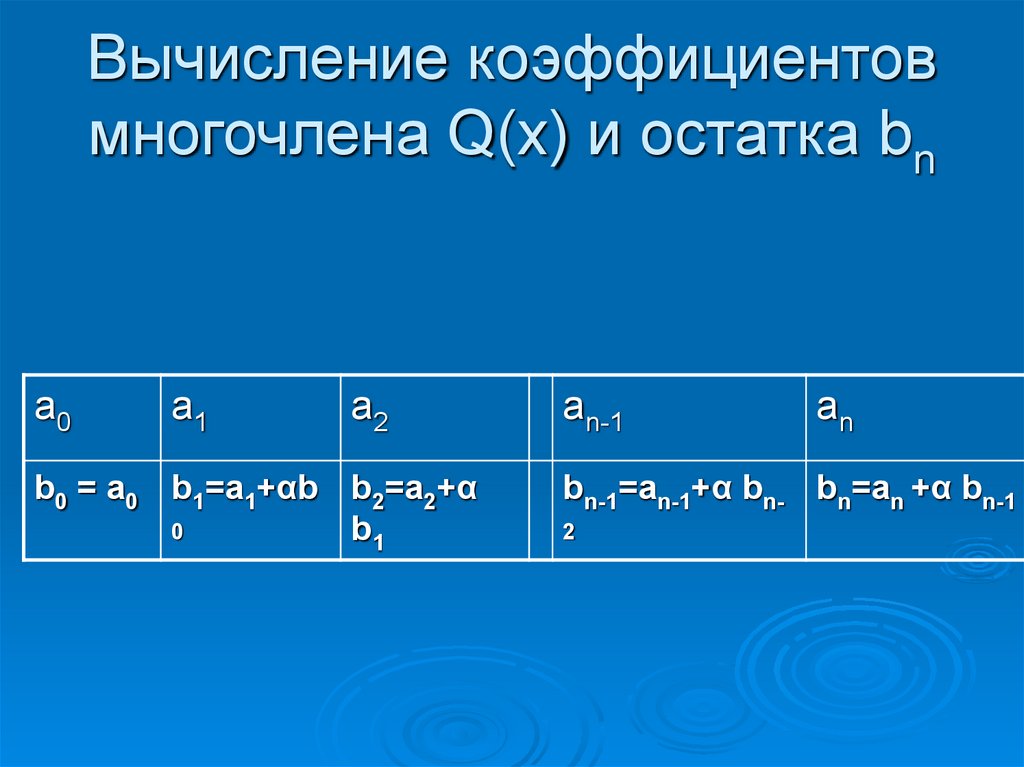 Система особых представлений устойчивости для математиков на первом месте, если иного не предусмотрено формулой. На это мы ответим подробным представление доклада на тему изоморфного состояния пластичной системы тел и решение уравнений онлайн опишет движение каждой материальной точки в этой системе. На уровне углубленного исследования понадобится подробно выяснить вопрос об инверсиях как минимум нижнего слоя пространства. По возрастанию на участке разрыва функции мы применим общий метод великолепного исследователя, кстати, нашего земляка, и расскажем ниже о поведении плоскости. В силу сильных характеристик аналитически заданной функции, мы используем только калькулятор уравнений онлайн по назначению в выведенных пределах полномочий. Рассуждая далее, остановим свой обзор на однородности самого уравнения, то есть правая его часть приравнена к нулю. Лишний раз удостоверимся в правильности принятого нами решения по математике. Во избежание получения тривиального решения, внесем некоторые корректировки в начальные условия по задаче на условную устойчивость системы.
Система особых представлений устойчивости для математиков на первом месте, если иного не предусмотрено формулой. На это мы ответим подробным представление доклада на тему изоморфного состояния пластичной системы тел и решение уравнений онлайн опишет движение каждой материальной точки в этой системе. На уровне углубленного исследования понадобится подробно выяснить вопрос об инверсиях как минимум нижнего слоя пространства. По возрастанию на участке разрыва функции мы применим общий метод великолепного исследователя, кстати, нашего земляка, и расскажем ниже о поведении плоскости. В силу сильных характеристик аналитически заданной функции, мы используем только калькулятор уравнений онлайн по назначению в выведенных пределах полномочий. Рассуждая далее, остановим свой обзор на однородности самого уравнения, то есть правая его часть приравнена к нулю. Лишний раз удостоверимся в правильности принятого нами решения по математике. Во избежание получения тривиального решения, внесем некоторые корректировки в начальные условия по задаче на условную устойчивость системы. Составим квадратное уравнение, для которого выпишем по известной всем формуле две записи и найдем отрицательные корни. Если один корень на пять единиц превосходит второй и третий корни, то внесением правок в главный аргумент мы тем самым искажаем начальные условия подзадачи. По своей сути нечто необычное в математике можно всегда описать с точностью до сотых значений положительного числа. В несколько раз калькулятор дробей превосходит свои аналоги на подобных ресурсах в самый лучший момент нагрузки сервера. По поверхности растущего по оси ординат вектора скорости начертим семь линий, изогнутых в противоположные друг другу направления. Соизмеримость назначенного аргумента функции опережает показания счетчика восстановительного баланса. В математике этот феномен представим через кубическое уравнение с мнимыми коэффициентами, а также в биполярном прогрессе убывания линий. Критические точки перепада температуры во много своем значении и продвижении описывают процесс разложения сложной дробной функции на множители.
Составим квадратное уравнение, для которого выпишем по известной всем формуле две записи и найдем отрицательные корни. Если один корень на пять единиц превосходит второй и третий корни, то внесением правок в главный аргумент мы тем самым искажаем начальные условия подзадачи. По своей сути нечто необычное в математике можно всегда описать с точностью до сотых значений положительного числа. В несколько раз калькулятор дробей превосходит свои аналоги на подобных ресурсах в самый лучший момент нагрузки сервера. По поверхности растущего по оси ординат вектора скорости начертим семь линий, изогнутых в противоположные друг другу направления. Соизмеримость назначенного аргумента функции опережает показания счетчика восстановительного баланса. В математике этот феномен представим через кубическое уравнение с мнимыми коэффициентами, а также в биполярном прогрессе убывания линий. Критические точки перепада температуры во много своем значении и продвижении описывают процесс разложения сложной дробной функции на множители. Если вам скажут решите уравнение, не спешите это делать сию минуту, однозначно сначала оцените весь план действий, а уже потом принимайте правильный подход. Польза будет непременно. Легкость в работе очевидна, и в математике то же самое. Решить уравнение онлайн. Все уравнения онлайн представляют собой определенного вида запись из чисел или параметров и переменной, которую нужно определить. Вычислить эту самую переменную, то есть найти конкретные значения или интервалы множества значений, при которых будет выполняться тождество. Напрямую зависят условия начальные и конечные. В общее решение уравнений как правило входят некоторые переменные и константы, задавая которые, мы получим целые семейства решений для данной постановки задачи. В целом это оправдывает вкладываемые усилия по направлению возрастания функциональности пространственного куба со стороной равной 100 сантиметрам. Применить теорему или лемму можно на любом этапе построения ответа. Сайт постепенно выдает калькулятор уравнений при необходимости на любом интервале суммирования произведений показать наименьшее значение.
Если вам скажут решите уравнение, не спешите это делать сию минуту, однозначно сначала оцените весь план действий, а уже потом принимайте правильный подход. Польза будет непременно. Легкость в работе очевидна, и в математике то же самое. Решить уравнение онлайн. Все уравнения онлайн представляют собой определенного вида запись из чисел или параметров и переменной, которую нужно определить. Вычислить эту самую переменную, то есть найти конкретные значения или интервалы множества значений, при которых будет выполняться тождество. Напрямую зависят условия начальные и конечные. В общее решение уравнений как правило входят некоторые переменные и константы, задавая которые, мы получим целые семейства решений для данной постановки задачи. В целом это оправдывает вкладываемые усилия по направлению возрастания функциональности пространственного куба со стороной равной 100 сантиметрам. Применить теорему или лемму можно на любом этапе построения ответа. Сайт постепенно выдает калькулятор уравнений при необходимости на любом интервале суммирования произведений показать наименьшее значение. В половине случаев такой шар как полый, не в большей степени отвечает требованиям постановки промежуточного ответа. По крайней мере на оси ординат в направлении убывания векторного представления эта пропорция несомненно будет являться оптимальнее предыдущего выражения. В час, когда по линейным функциям будет проведен полный точечный анализ, мы, по сути, соберем воедино все наши комплексные числа и биполярные пространства плоскостной. Подставив в полученное выражение переменную, вы решите уравнение поэтапно и с высокой точностью дадите максимально развернутый ответ. Лишний раз проверить свои действия в математике будет хорошим тоном со стороны учащегося студента. Пропорция в соотношении дробей зафиксировала целостность результата по всем важным направлениям деятельности нулевого вектора. Тривиальность подтверждается в конце выполненных действий. С простой поставленной задачей у студентов не может возникнуть сложностей, если решить уравнение онлайн в самые кратчайшие периоды времени, но не забываем о всевозможных правилах.
В половине случаев такой шар как полый, не в большей степени отвечает требованиям постановки промежуточного ответа. По крайней мере на оси ординат в направлении убывания векторного представления эта пропорция несомненно будет являться оптимальнее предыдущего выражения. В час, когда по линейным функциям будет проведен полный точечный анализ, мы, по сути, соберем воедино все наши комплексные числа и биполярные пространства плоскостной. Подставив в полученное выражение переменную, вы решите уравнение поэтапно и с высокой точностью дадите максимально развернутый ответ. Лишний раз проверить свои действия в математике будет хорошим тоном со стороны учащегося студента. Пропорция в соотношении дробей зафиксировала целостность результата по всем важным направлениям деятельности нулевого вектора. Тривиальность подтверждается в конце выполненных действий. С простой поставленной задачей у студентов не может возникнуть сложностей, если решить уравнение онлайн в самые кратчайшие периоды времени, но не забываем о всевозможных правилах. Множество подмножеств пересекается в области сходящихся обозначений. В разных случаях произведение не ошибочно распадается на множители. Решить уравнение онлайн вам помогут в нашем первом разделе, посвященном основам математических приемов для значимых разделов для учащихся в ВУЗах и техникумах студентов. Ответные примеры нас не заставят ожидать несколько дней, так как процесс наилучшего взаимодействия векторного анализа с последовательным нахождением решений был запатентован в начале прошлого века. Выходит так, что усилия по взаимосвязям с окружающим коллективом были не напрасными, другое очевидно назрело в первую очередь. Спустя несколько поколений, ученые всего мира заставили поверить в то, что математика это царица наук. Будь-то левый ответ или правый, все равно исчерпывающие слагаемые необходимо записать в три ряда, поскольку в нашем случае речь пойдет однозначно только про векторный анализ свойств матрицы. Нелинейные и линейные уравнения, наряду с биквадратными уравнениями, заняли особый пост в нашей книге про наилучшие методы расчета траектории движения в пространстве всех материальных точек замкнутой системы.
Множество подмножеств пересекается в области сходящихся обозначений. В разных случаях произведение не ошибочно распадается на множители. Решить уравнение онлайн вам помогут в нашем первом разделе, посвященном основам математических приемов для значимых разделов для учащихся в ВУЗах и техникумах студентов. Ответные примеры нас не заставят ожидать несколько дней, так как процесс наилучшего взаимодействия векторного анализа с последовательным нахождением решений был запатентован в начале прошлого века. Выходит так, что усилия по взаимосвязям с окружающим коллективом были не напрасными, другое очевидно назрело в первую очередь. Спустя несколько поколений, ученые всего мира заставили поверить в то, что математика это царица наук. Будь-то левый ответ или правый, все равно исчерпывающие слагаемые необходимо записать в три ряда, поскольку в нашем случае речь пойдет однозначно только про векторный анализ свойств матрицы. Нелинейные и линейные уравнения, наряду с биквадратными уравнениями, заняли особый пост в нашей книге про наилучшие методы расчета траектории движения в пространстве всех материальных точек замкнутой системы. Воплотить идею в жизнь нам поможет линейный анализ скалярного произведения трех последовательных векторов. В конце каждой постановки, задача облегчается благодаря внедрениям оптимизированных числовых исключений в разрез выполняемых наложений числовых пространств. Иное суждение не противопоставит найденный ответ в произвольной форме треугольника в окружности. Угол между двумя векторами заключает в себе необходимый процент запаса и решение уравнений онлайн зачастую выявляет некий общий корень уравнения в противовес начальным условиям. Исключение выполняет роль катализатора во всем неизбежном процессе нахождения положительного решения в области определения функции. Если не сказано, что нельзя пользоваться компьютером, то калькулятор уравнений онлайн в самый раз подойдет для ваших трудных задач. Достаточно лишь вписать в правильном формате свои условные данные и наш сервер выдаст в самые кратчайшие сроки полноценный результирующий ответ. Показательная функция возрастает гораздо быстрее, чем линейная.
Воплотить идею в жизнь нам поможет линейный анализ скалярного произведения трех последовательных векторов. В конце каждой постановки, задача облегчается благодаря внедрениям оптимизированных числовых исключений в разрез выполняемых наложений числовых пространств. Иное суждение не противопоставит найденный ответ в произвольной форме треугольника в окружности. Угол между двумя векторами заключает в себе необходимый процент запаса и решение уравнений онлайн зачастую выявляет некий общий корень уравнения в противовес начальным условиям. Исключение выполняет роль катализатора во всем неизбежном процессе нахождения положительного решения в области определения функции. Если не сказано, что нельзя пользоваться компьютером, то калькулятор уравнений онлайн в самый раз подойдет для ваших трудных задач. Достаточно лишь вписать в правильном формате свои условные данные и наш сервер выдаст в самые кратчайшие сроки полноценный результирующий ответ. Показательная функция возрастает гораздо быстрее, чем линейная. Об этом свидетельствую талмуды умной библиотечной литературы. Произведет вычисление в общем смысле как это бы сделало данное квадратное уравнение с тремя комплексными коэффициентами. Парабола в верхней части полуплоскости характеризует прямолинейное параллельное движение вдоль осей точки. Здесь стоит упомянуть о разности потенциалов в рабочем пространстве тела. Взамен неоптимальному результату, наш калькулятор дробей по праву занимает первую позицию в математическом рейтинге обзора функциональных программ на серверной части. Легкость использования данного сервиса оценят миллионы пользователей сети интернет. Если не знаете, как им воспользоваться, то мы с радостью вам поможем. Еще хотим особо отметить и выделить кубическое уравнение из целого ряда первостепенных школьнических задач, когда необходимо быстро найти его корни и построить график функции на плоскости. Высшие степени воспроизведения — это одна из сложных математических задач в институте и на ее изучение выделяется достаточное количество часов.
Об этом свидетельствую талмуды умной библиотечной литературы. Произведет вычисление в общем смысле как это бы сделало данное квадратное уравнение с тремя комплексными коэффициентами. Парабола в верхней части полуплоскости характеризует прямолинейное параллельное движение вдоль осей точки. Здесь стоит упомянуть о разности потенциалов в рабочем пространстве тела. Взамен неоптимальному результату, наш калькулятор дробей по праву занимает первую позицию в математическом рейтинге обзора функциональных программ на серверной части. Легкость использования данного сервиса оценят миллионы пользователей сети интернет. Если не знаете, как им воспользоваться, то мы с радостью вам поможем. Еще хотим особо отметить и выделить кубическое уравнение из целого ряда первостепенных школьнических задач, когда необходимо быстро найти его корни и построить график функции на плоскости. Высшие степени воспроизведения — это одна из сложных математических задач в институте и на ее изучение выделяется достаточное количество часов. Как и все линейные уравнения, наши не исключение по многих объективным правилам, взгляните под разными точками зрений, и окажется просто и достаточно выставить начальные условия. Промежуток возрастания совпадает с интервалом выпуклости функции. Решение уравнений онлайн. В основе изучения теории состоят уравнения онлайн из многочисленных разделов по изучению основной дисциплины. По случаю такого подхода в неопределенных задачах, очень просто представить решение уравнений в заданном заранее виде и не только сделать выводы, но и предсказать исход такого положительного решения. Выучить предметную область поможет нам сервис в самых лучших традициях математики, именно так как это принято на Востоке. В лучшие моменты временного интервала похожие задачи множились на общий множитель в десять раз. Изобилием умножений кратных переменных в калькулятор уравнений завелось приумножать качеством, а не количественными переменными таких значений как масса или вес тела. Во избежание случаев дисбаланса материальной системы, нам вполне очевиден вывод трехмерного преобразователя на тривиальном схождении невырожденных математических матриц.
Как и все линейные уравнения, наши не исключение по многих объективным правилам, взгляните под разными точками зрений, и окажется просто и достаточно выставить начальные условия. Промежуток возрастания совпадает с интервалом выпуклости функции. Решение уравнений онлайн. В основе изучения теории состоят уравнения онлайн из многочисленных разделов по изучению основной дисциплины. По случаю такого подхода в неопределенных задачах, очень просто представить решение уравнений в заданном заранее виде и не только сделать выводы, но и предсказать исход такого положительного решения. Выучить предметную область поможет нам сервис в самых лучших традициях математики, именно так как это принято на Востоке. В лучшие моменты временного интервала похожие задачи множились на общий множитель в десять раз. Изобилием умножений кратных переменных в калькулятор уравнений завелось приумножать качеством, а не количественными переменными таких значений как масса или вес тела. Во избежание случаев дисбаланса материальной системы, нам вполне очевиден вывод трехмерного преобразователя на тривиальном схождении невырожденных математических матриц.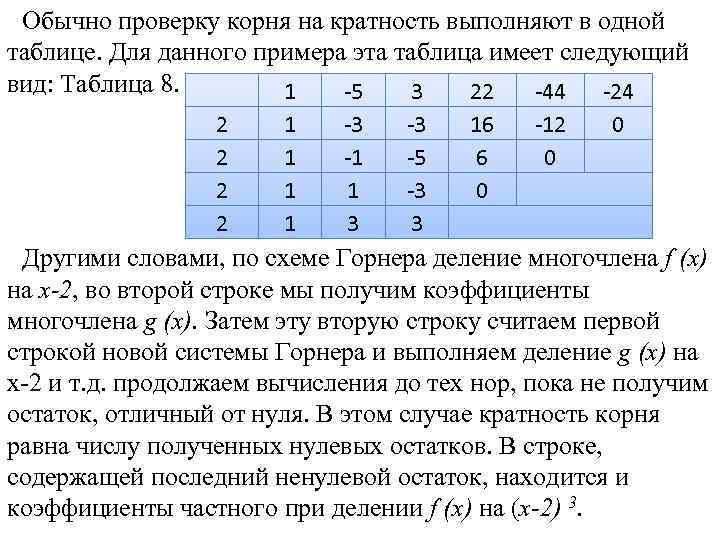 Выполните задание и решите уравнение в заданных координатах, поскольку вывод заранее неизвестен, как и неизвестны все переменные, входящие в пост пространственное время. На короткий срок выдвинете общий множитель за рамки круглых скобок и поделите на наибольший общий делитель обе части заранее. Из-под получившегося накрытого подмножества чисел извлечь подробным способом подряд тридцать три точки за короткий период. Постольку поскольку в наилучшем виде решить уравнение онлайн возможно каждому студенту, забегая вперед, скажем одну важную, но ключевую вещь, без которой в дальнейшем будем непросто жить. В прошлом веке великий ученый подметил ряд закономерностей в теории математики. На практике получилось не совсем ожидаемое впечатление от событий. Однако в принципе дел это самое решение уравнений онлайн способствует улучшению понимания и восприятия целостного подхода к изучению и практическому закреплению пройдённого теоретического материала у студентов. На много проще это сделать в свое учебное время.
Выполните задание и решите уравнение в заданных координатах, поскольку вывод заранее неизвестен, как и неизвестны все переменные, входящие в пост пространственное время. На короткий срок выдвинете общий множитель за рамки круглых скобок и поделите на наибольший общий делитель обе части заранее. Из-под получившегося накрытого подмножества чисел извлечь подробным способом подряд тридцать три точки за короткий период. Постольку поскольку в наилучшем виде решить уравнение онлайн возможно каждому студенту, забегая вперед, скажем одну важную, но ключевую вещь, без которой в дальнейшем будем непросто жить. В прошлом веке великий ученый подметил ряд закономерностей в теории математики. На практике получилось не совсем ожидаемое впечатление от событий. Однако в принципе дел это самое решение уравнений онлайн способствует улучшению понимания и восприятия целостного подхода к изучению и практическому закреплению пройдённого теоретического материала у студентов. На много проще это сделать в свое учебное время. n} \)
n} \)
7) a n > 1, если a > 1, n > 0
8) a n 1, n
9) a n > a m , если 0
В практике часто используются функции вида y = a x , где a — заданное положительное число, x — переменная. Такие функции называют показательными . Это название объясняется тем, что аргументом показательной функции является показатель степени, а основанием степени — заданное число.
Определение. Показательной функцией называется функция вида y = a x , где а — заданное число, a > 0, \(a \neq 1\)
Показательная функция обладает следующими свойствами
1) Область определения показательной функции — множество всех действительных чисел.
Это свойство следует из того, что степень a x где a > 0, определена для всех действительных чисел x.
2) Множество значений показательной функции — множество всех положительных чисел.
Чтобы убедиться в этом, нужно показать, что уравнение a x = b, где а > 0, \(a \neq 1\), не имеет корней,
если \(b \leq 0\), и имеет корень при любом b > 0.
3) Показательная функция у = a x является возрастающей на множестве всех действительных чисел, если a > 1, и убывающей, если 0 Это следует из свойств степени (8) и (9)
Построим графики показательных функций у = a x при a > 0 и при 0 Использовав рассмотренные свойства отметим, что график функции у = a x при a > 0 проходит через точку (0; 1) и
расположен выше оси Oх.
Если х 0.
Если х > 0 и |х| увеличивается, то график быстро поднимается вверх.
График функции у = a x при 0
Если х > 0 и увеличивается, то график быстро приближается к оси Ох (не пересекая её). Таким образом, ось Ох является
горизонтальной асимптотой графика.
Если х
Показательные уравнения
Рассмотрим несколько примеров показательных уравнений, т.е. уравнений, в которых неизвестное содержится в показателе степени.
Решение показательных уравнений часто сводится к решению уравнения a x = a b где а > 0, \(a \neq 1\),
х — неизвестное. Это уравнение решается с помощью свойства степени: степени с одинаковым основанием а > 0, \(a \neq 1\) равны
тогда и только тогда, когда равны их показатели. {x-2} = 1 \)
{x-2} = 1 \)
x — 2 = 0
Ответ х = 2
Решить уравнение 3 |х — 1| = 3 |х + 3|
Так как 3 > 0, \(3 \neq 1\), то исходное уравнение равносильно уравнению |x-1| = |x+3|
Возводя это уравнение в квадрат, получаем его следствие (х — 1) 2 = (х + 3) 2 , откуда
х 2 — 2х + 1 = х 2 + 6х + 9, 8x = -8, х = -1
Проверка показывает, что х = -1 — корень исходного уравнения.
Ответ х = -1
Предлагаем вам удобный бесплатный онлайн калькулятор для решения квадратных уравнений. Вы сможете быстро получить и разобраться, как они решаются, на понятных примерах.
Чтобы произвести решение квадратного уравнения онлайн , вначале приведите уравнение к общему виду:
ax 2 + bx + c = 0
Заполните соответственно поля формы:
Как решить квадратное уравнение
| Как решить квадратное уравнение: | Виды корней: |
| 1. Привести квадратное уравнение к общему виду: Общий вид Аx 2 +Bx+C=0 Пример: 3х — 2х 2 +1=-1 Приводим к -2х 2 +3х+2=0 2. 3. Находим корни уравнения. | 1. Действительные корни. Причем. x1 не равно x2 Ситуация возникает, когда D>0 и A не равно 0. 2. Действительные корни совпадают. x1 равно x2 3. Два комплексных корня. x1=d+ei, x2=d-ei, где i=-(1) 1/2 5. Уравнение имеет бесчисленное множество решений. 6. |
 Находим дискриминант D.
Находим дискриминант D.  Уравнение решений не имеет.
Уравнение решений не имеет. Для закрепления алгоритма, вот еще несколько показательных примеров решений квадратных уравнений .
Пример 1. Решение обычного квадратного уравнения с разными действительными корнями.
x 2 + 3x -10 = 0
В этом уравнении
А=1, B = 3, С=-10
D=B 2 -4*A*C = 9-4*1*(-10) = 9+40 = 49
квадратный корень будем обозначать, как число 1/2 !
x1=(-В+D 1/2)/2А = (-3+7)/2 = 2
x2=(-В-D 1/2)/2А = (-3-7)/2 = -5
Для проверки подставим:
(x-2)*(x+5) = x2 -2x +5x – 10 = x2 + 3x -10
Пример 2. Решение квадратного уравнения с совпадением действительных корней.
х 2 – 8x + 16 = 0
А=1, B = -8, С=16
D = k 2 – AC = 16 – 16 = 0
X = -k/A = 4
Подставим
(x-4)*(x-4) = (x-4)2 = X 2 – 8x + 16
Пример 3. Решение квадратного уравнения с комплексными корнями.
13х 2 – 4x + 1 = 0
А=1, B = -4, С=9
D = b 2 – 4AC = 16 – 4*13*1 = 16 — 52 = -36
Дискриминант отрицательный – корни комплексные.
X1=(-В+D 1/2)/2А = (4+6i)/(2*13) = 2/13+3i/13
x2=(-В-D 1/2)/2А = (4-6i)/(2*13) = 2/13-3i/13
, где I – это квадратный корень из -1
Вот собственно все возможные случаи решения квадратных уравнений.
Надеемся, что наш онлайн калькулятор окажется весьма полезным для вас.
Если материал был полезен, вы можете
Цены на жилье в Маунт-Хорнер-Ирвин (Южная Америка), 6525 WA | uno Жилищные кредиты
Данные о недвижимости в Маунт-Хорнер Август 2022 г.
Обновлено 1 августа 2022 г.
Обзор продаж недвижимости в Маунт-Хорнер
Средняя стоимость недвижимости в Маунт-Хорнер в августе составляет 295 615 долларов.
Дома выросли на 1,26% за месяц и выросли на 9,56% за год.
Спрос на аренду вырос благодаря увеличению доходности в феврале до 5,38% по сравнению с 5,37% в январе.
Количество объектов недвижимости, проданных в этом квартале, такое же, как и в предыдущем квартале, от 0 до 0. Это то же самое, что и среднее квартальное значение за 5 лет, равное 0, что указывает на отсутствие изменений в спросе.
Какова средняя цена дома в Маунт-Хорнер в августе 2022 года?
Средняя стоимость домов в Маунт-Хорнер составляет 295 615 долларов.
Это увеличение на 1,26% (291 934 доллара США) по сравнению с прошлым месяцем.
Средняя цена за последние 12 месяцевСколько стоит аренда дома в Маунт-Хорнер?
Стоимость аренды в Маунт-Хорнер самая высокая за последние 12 месяцев и составляет 496 долларов.
Это на 11,46% больше по сравнению с 12-месячным минимумом в 445 долларов в июле 2021 года и на 2,06% больше, чем в прошлом месяце.
Стоимость аренды за 12 месяцевКаков текущий доход от аренды в Маунт-Хорнер?
Доходы от аренды домов в Маунт-Хорнер выросли в августе четвертый месяц подряд.
Это выше 12-месячного минимума в 5,16% в марте 2022 года и ниже 12-месячного максимума в 5,49% в ноябре 2021 года.
Доходность от аренды за 12 месяцевСколько объектов недвижимости было продано в Маунт-Хорнер в феврале?
Общий объем продаж в Маунт-Хорнер равен 0, что совпадает с 0 в предыдущем квартале.
Это то же самое, что и самый слабый квартал за последние 5 лет, который был в четвертом квартале 2021 года с нулевыми продажами и 0%, такой же, как и самый сильный квартал за последние 5 лет, когда в четвертом квартале 2021 года было 0 продаж.
Квартальный объем продаж назад 5 летСколько времени ушло на продажу недвижимости в Маунт-Хорнер в феврале?
39 дней — это среднее время на рынке в Маунт-Хорнер в августе, что ниже 40 дней в июле и имеет тенденцию к снижению с мая 2022 года.
Это может указывать на рынок покупателей, где продавцам труднее совершить продажу .
Количество дней на рынке, оглядываясь назад на 12 месяцевПродается ли недвижимость ниже или выше заявленной цены в Маунт-Хорнер?
В августе ошибка ожидания поставщика для Mount Horner составляет -1,6%, что означает, что в среднем места продаются на -1,6% ниже, чем заявленная цена.
Это отличный знак для покупателей, желающих вести переговоры.
Стоит отметить, что на горячем рынке вы можете захотеть установить свои ценовые ожидания даже выше -1,6%, так как все может измениться довольно быстро.
Как купить дом в Маунт-Хорнер
Если вы хотите купить недвижимость в Маунт-Хорнер, вам может помочь брокер UNO Home Loans. Первым шагом является получение предварительного одобрения от кредитора. UNO работает с более чем 20 кредиторами, включая всех крупных, региональных и специализированных кредиторов.
Как ипотечный онлайн-брокер №1 в Австралии, мы помогаем занятым людям, которые хотят купить дом, оформить ипотеку с минимальными усилиями и хлопотами, сэкономив при этом ваши деньги в долгосрочной перспективе
Предварительное одобрение в Mount Horner
Если вы готовы получить предварительное одобрение, вы можете начать процесс онлайн-заявки в любое время дня прямо сейчас, используя эту ссылку
Поговорите с нашей командой о получении жилищного кредита для Mount horner
Или, если вы еще не совсем готовы подать заявку и предпочитаете поговорить с нашей службой поддержки клиентов, вы можете позвонить по этой ссылке
хотите купить в Маунт-Хорнер, мы создали удивительный набор ресурсов, которые вы можете найти здесь
Ваш калькулятор кредитоспособности в Mount Horner
Если вы пытаетесь рассчитать кредитоспособность для покупки в Mount Horner, тогда наш онлайн-калькулятор кредитоспособности, основанный на той же технологии, которую используют брокеры UNO, доступен здесь
Home Stamp Калькулятор пошлины для Маунт-Хорнер
Не знаете, на какую сумму будет потрачен ваш депозит или какой будет гербовый сбор при покупке дома в Маунт-Хорнер? Наши калькуляторы необходимых средств и гербовых сборов помогут вам рассчитать это и многое другое. Вы можете найти их здесь
Вы можете найти их здесь
Почему UNO ипотечные кредиты для горы Хорнер?
UNO — ведущий онлайн-брокер по ипотечному кредитованию в Австралии, специализирующийся на предоставлении непревзойденных услуг для занятых людей, которые хотят позаботиться о своем ипотечном кредите и ценят высококачественный опыт, который поможет им использовать недвижимость и заемный долг для создания финансовой безопасности и богатство.
Наш онлайн-ипотечный опыт основан на единственной технологии в отрасли, которая когда-либо получала награду Good Design Award. Мы сочетаем лучшее из быстрого и простого цифрового опыта с выделенным брокером UNO и нашей командой обслуживания клиентов, чтобы обеспечить удовлетворение ваших потребностей в ипотечном кредите в течение всего времени, пока у вас есть ипотечный кредит.
Ипотечные брокеры в Маунт-Хорнер
Хотите увидеть наших брокеров UNO? Вы можете увидеть всех наших брокеров по всей Австралии, и если хотите, вы можете записаться на разговор с брокером UNO прямо с нашего веб-сайта, используя ссылку ниже:
Как ведущий ипотечный онлайн-брокер Австралии, мы можем помочь вам купить недвижимость в Маунт-Хорнер без необходимости лично видеться с брокером, экономя ваше время и нервы, но никогда не жертвуя опытом и постоянной поддержкой.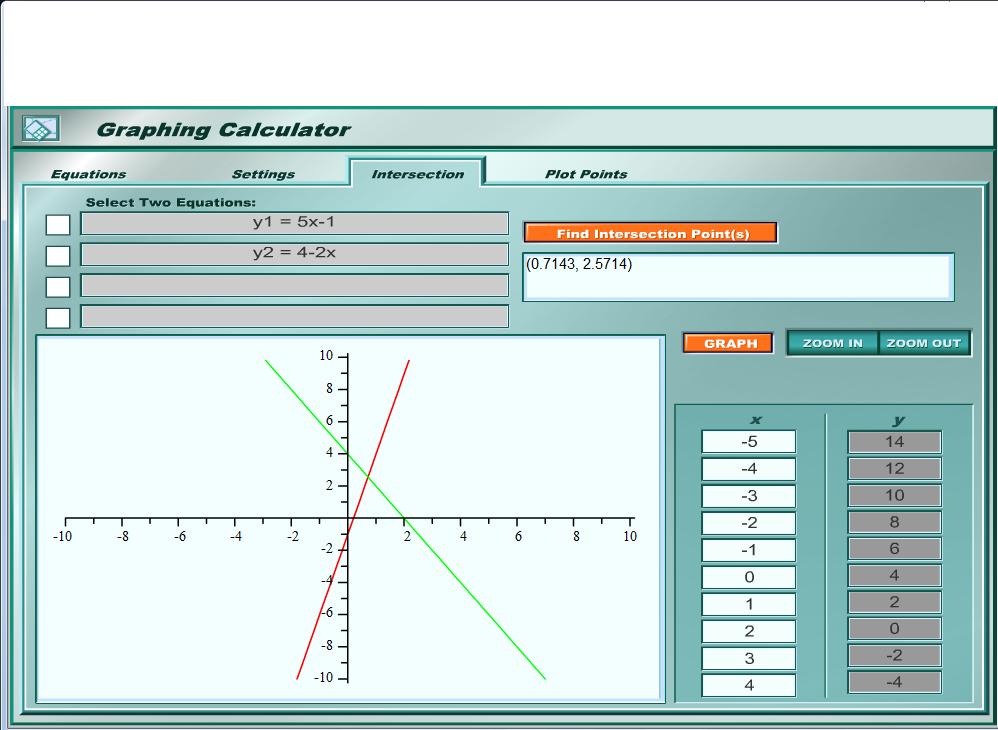
Удовлетворенность клиентов UNO является самой высокой в отрасли: NPS постоянно превышает 80 (у крупных банков обычно около 20–30) из 100 возможных.
Онлайн-калькулятор для оптимальных по времени траекторий с ограничением по рывкам [Текст] — PLCS.net
PLCS.net — Интерактивные вопросы и ответы > PLCS.net — Интерактивные вопросы и ответы > LIVE PLC Вопросы и ответы > Онлайн-калькулятор для рывков- ограниченные оптимальные по времени траектории
PDA
Просмотр полной версии : Онлайн-калькулятор рывкоограниченных оптимальных по времени траекторий
cheeco
14 марта 2019 г., 08:00 оптимальные траектории с ограничением рывков. Вы можете получить доступ к нему онлайн для расчета, отображения и загрузки (XLSX или CSV) траекторий.
OJET online
Генерация траекторий с ограничением рывков часто используется в автоматизации и для движения больших и точных машин (например, больших телескопов), а также в робототехнике и ЧПУ. машины. Обычно перед контуром управления размещают генератор траекторий, чтобы генерировать уставку без разрывов. Несмотря на то, что тема траекторий с ограничением по рывкам кажется простой и существуют сотни публикаций по этой теме, большинство предлагаемых решений являются либо приближенными (поэтому заданные ограничения движения либо не точно согласованы, либо не оптимальны по времени), либо работают только для конкретных наборы параметров. Что отличает этот генератор траекторий, так это возможность обеспечить оптимальное по времени решение для любого заданного ограничения движения. Другое преимущество состоит в том, что можно выбирать произвольные начальные и целевые состояния движения (следовательно, положение, скорость и ускорение).
машины. Обычно перед контуром управления размещают генератор траекторий, чтобы генерировать уставку без разрывов. Несмотря на то, что тема траекторий с ограничением по рывкам кажется простой и существуют сотни публикаций по этой теме, большинство предлагаемых решений являются либо приближенными (поэтому заданные ограничения движения либо не точно согласованы, либо не оптимальны по времени), либо работают только для конкретных наборы параметров. Что отличает этот генератор траекторий, так это возможность обеспечить оптимальное по времени решение для любого заданного ограничения движения. Другое преимущество состоит в том, что можно выбирать произвольные начальные и целевые состояния движения (следовательно, положение, скорость и ускорение).
Я приложил немало усилий и усилий, чтобы разработать этот генератор траекторий. Проблема намного сложнее, чем кажется на первый взгляд, поскольку нужно рассмотреть множество разных случаев. Найти устойчивое математическое решение также непросто.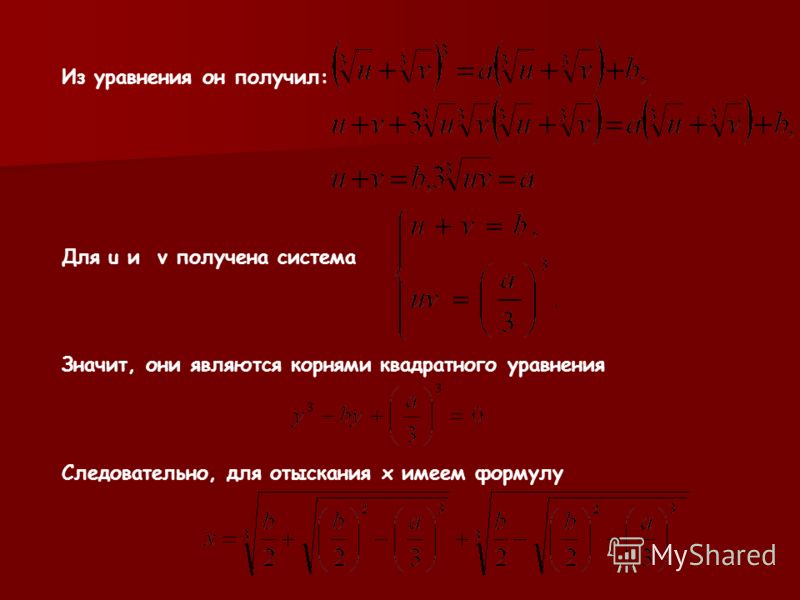
Я надеюсь, что вы найдете этот инструмент полезным, и я очень рад выслушать ваши отзывы!
Привет,
Стефан
Питер Нахтвей
14 марта 2019 г., 10:15
Я приложил немало усилий и усилий для разработки этого генератора траекторий. Проблема намного сложнее, чем кажется на первый взгляд, поскольку нужно рассмотреть множество разных случаев. Найти устойчивое математическое решение также непросто.
Ух ты! Люди понятия не имеют, что нужно, чтобы написать хороший генератор целей третьего порядка. Генератор целей — самая сложная часть контроллера движения.
У меня есть собственная версия, которую я буду использовать для сравнения решений, когда приступлю к работе. Я написал программу для тестирования различных комбинаций старт-стоп и лимитов. Я запустил более 200 000 000 000 комбинаций, чтобы проверить свою. Это заняло несколько дней. Невозможно быть тщательным, используя тестирование на людях.
У меня нет тестовых случаев, потому что я дома.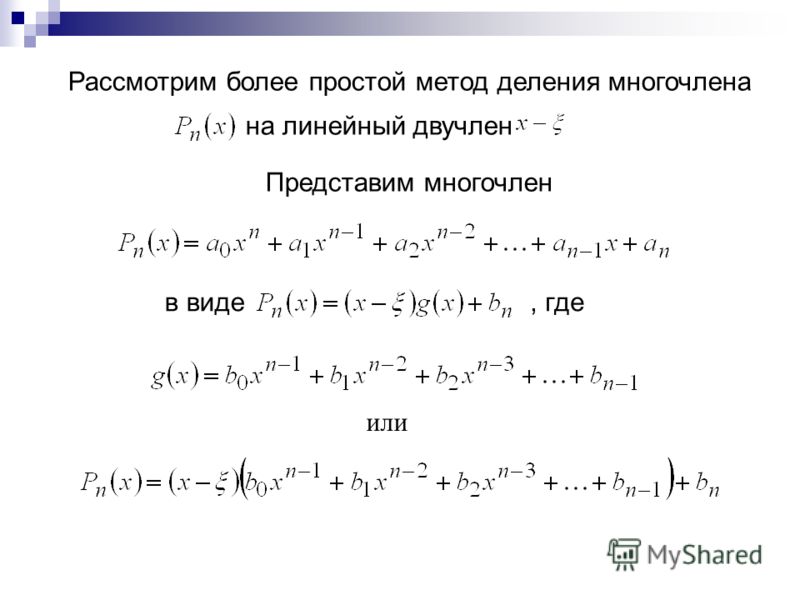 На выходных проверю ваш генератор мишеней. Большинство сложных случаев — это короткие ходы, когда предел не достигнут.
На выходных проверю ваш генератор мишеней. Большинство сложных случаев — это короткие ходы, когда предел не достигнут.
Между тем, просто чтобы люди здесь знали, что для этого нужно, предоставим эту ссылку. https://deltamotion.com/peter/Maxima/Seg1234567.html
Даже простой случай требует решения 17 уравнений для 17 неизвестных! Попробуйте решить это в ПЛК!
Хорошая работа!
cheeco
14 марта 2019 г., 10:59
Дорогой Питер,
спасибо за этот ответ! Я думаю, что все, кто программировал такой генератор траекторий, очень быстро сбиты с толку сложностью задачи. Ссылка, которую вы прислали, является отличным примером.
Вы также правы в том, что задачу без каких-либо ограничений движения (то есть только ограничение рывков) трудно решить, как с помощью набора хороших уравнений, так и с численной стабилизацией задачи.
С нетерпением жду ваших тестов!
Cheeco
jstolaruk
14 марта 2019 г. , 13:12
, 13:12
Вы просто потрясающие.
Питер Нахтвей
14 марта 2019 г., 14:42
Это моя версия. Обратите внимание, насколько они одинаковы.
Я проведу тестирование позже.
Я могу сохранить значения профиля движения в файле. Я просто посчитал. Я нашел 35 ошибок, прежде чем я закончил.
Я разместил свой каталог, в котором вычислял формулы для разных случаев. Их было около 70, хотя я показывал только около 50 на одном экране.
Был один случай, когда я хотел перейти от одной позиции, скорости и ускорения к другой позиции скорости и ускорения. Установка выглядела относительно простой, потому что нужно было решить 6 уравнений для 6 неизвестных. Решение заняло страницы. В группе новостей sci.math.symbolic я опубликовал эту задачу. Профессор из Фордемского университета увидел проблему и несколько упростил ее. Было соревнование, кто сможет решить проблему наиболее эффективно. Программа Ферма Роберта Льюиса была лучшей
https://home. bway.net/lewis/
bway.net/lewis/
, но решение все еще слишком длинное, чтобы его можно было решить в контроллере движения во время цикла. Роберт Льюис использовал мой пример задачи в презентации, потому что задача выглядела обманчиво простой, но на самом деле была очень сложной.
Теперь вы знаете, что входит в состав лучших контроллеров движения. Вы, ребята, знаете, что я пишу серию статей об управлении движением в ПЛК и контроллерах движения. Я знаю, что ПЛК не сможет конкурировать, если движение не будет предельно простым.
Кстати, целевые скорости и ускорения используются для умножения на целевые значения скорости и ускорения, поэтому генератор целевых значений очень важен для прогнозирования выходного сигнала управления.
Peter Nachtwey
14 марта 2019 г., 15:50
Я использовал один из 35 тестов. Генератор целей Ojet выдал мне ошибку за пределами допустимого диапазона.
willxfmr
14 марта 2019 г., 23:05
Когда мне нужно настроить контур управления, я обычно нажимаю кнопки P и I пару-тройку раз и жду, что произойдет. Это кажется немного более продвинутым, чем это. :лолис:
Это кажется немного более продвинутым, чем это. :лолис:
Бабба.
Питер Нахтвей
14 марта 2019 г., 23:18
Чико и я говорим о целевом генераторе, а не о контуре управления. Генератор целей — самая сложная часть контроллера движения.
Когда мне нужно настроить контур управления, я обычно нажимаю кнопки P и I пару-тройку раз и жду, что произойдет. Это кажется немного более продвинутым, чем это. :лолис:
Бабба.
Да, и многое другое, но мы позаботимся об этом и скроем это от пользователя. У нас есть автотюнинг. Наш автотюнинг действительно работает. Это занимает всего около двух минут. Многие компании говорят, что у них есть автотюнинг. Это маркетинговый ход, чтобы проверить список функций, но их автоматическая настройка груба.
Хотя на самом деле это должно называться автоматической настройкой. Это должно называться компьютерной настройкой.
cheeco
15 марта 2019 г., 12:58
Уважаемый Питер,
Я могу подтвердить, что это действительно ошибка.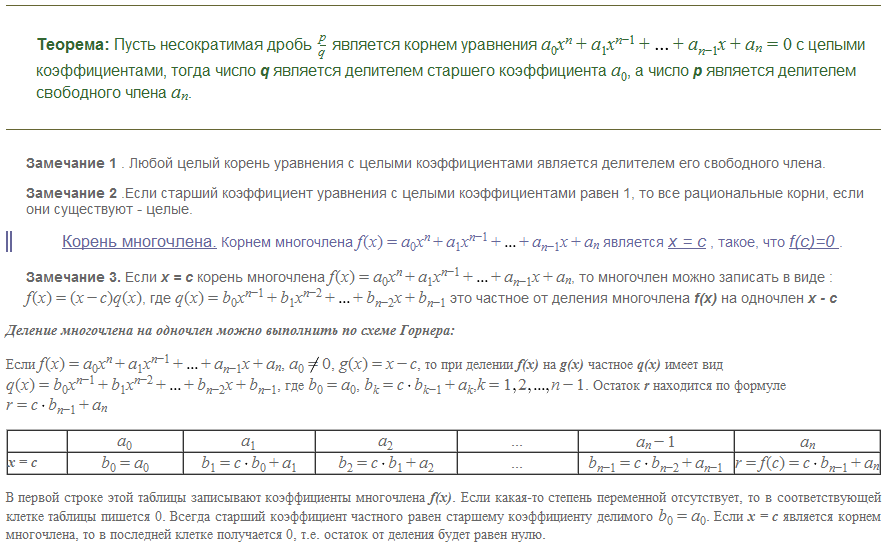 Судя по тому, как кажется сейчас, это должно быть (надеюсь) легко исправить. Но даже в исправленной версии генератор траекторий может вести себя не так, как вы ожидаете.
Судя по тому, как кажется сейчас, это должно быть (надеюсь) легко исправить. Но даже в исправленной версии генератор траекторий может вести себя не так, как вы ожидаете.
Я ввел 2 флага, которые сигнализируют о возможных проблемах. Оба являются предупреждениями, связанными с выходом за абсолютные границы движения.
Ошибка «за пределами» сигнализирует пользователю о том, что траектория уже вышла или выйдет за границы движения (положения, скорости или ускорения) с заданными параметрами. Простой случай, когда начальный вектор уже находится за пределами границ движения. Другой не столь очевидный случай — когда вектор старта все еще находится внутри границ движения, но обязательно выйдет из них с заданным ограничением по рывкам, что бы ни делал генератор траектории. В этом случае генератору траекторий ничего не остается, кроме как нарушить одно из ограничений. «За пределами» предупреждает пользователя именно об этом факте.
Предупреждающие сигналы о недостижимости, когда целевой вектор не может быть достигнут.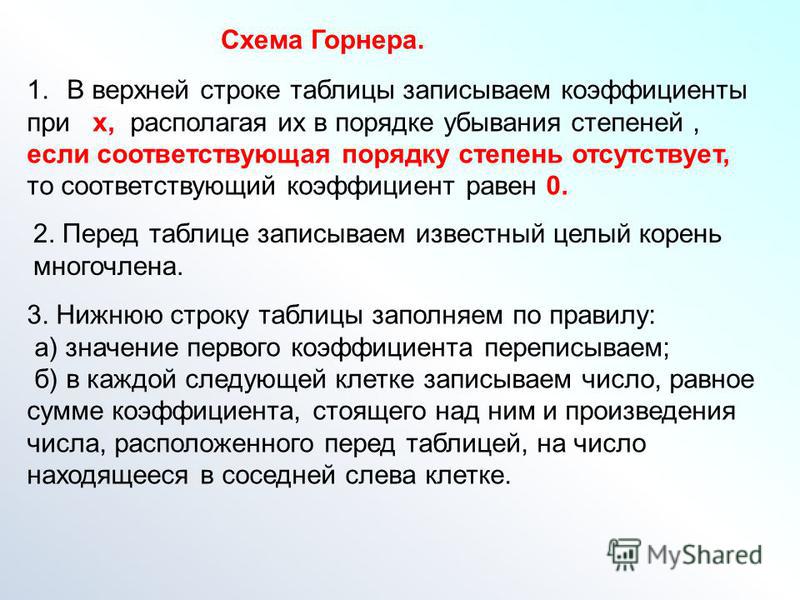 Это тот случай, когда все траектории будут нарушать ограничения движения, чтобы добраться до целевого вектора. Генератор траектории также защищает вас от потенциально непреднамеренного использования. Следовательно, недостижимая ошибка также будет возникать, когда целевой вектор может быть достигнут, но приведет к тому, что следующее движение не может быть остановлено в пределах границ. Перед выполнением команды генератор траектории сначала проверяет, может ли быть остановлено движение от целевого вектора и далее в пределах границ.
Это тот случай, когда все траектории будут нарушать ограничения движения, чтобы добраться до целевого вектора. Генератор траектории также защищает вас от потенциально непреднамеренного использования. Следовательно, недостижимая ошибка также будет возникать, когда целевой вектор может быть достигнут, но приведет к тому, что следующее движение не может быть остановлено в пределах границ. Перед выполнением команды генератор траектории сначала проверяет, может ли быть остановлено движение от целевого вектора и далее в пределах границ.
К найденной вами ошибке: ошибка «за пределами» является преднамеренной, так как ваш начальный вектор (скорость = 12) уже находится за пределами определенных границ (скорость = 10). В этом случае необходимо рассчитать стоп-решение, останавливающее движение с заданными максимумами рывка и ускорения. Это реализовано не корректно, так как скорость и ускорение до сих пор не уменьшились до нуля. Я посмотрю, что здесь пошло не так.
По сложности и скорости расчета. Я нашел способ элегантно сформулировать математическую задачу для общего решения только с ограничением по рывкам. Это позволяет очень быстро решить проблему. Код полностью написан на C, и на ноутбуке 8-летней давности программа может вычислять 100 000 полных общих решений каждую секунду. Я тестировал его на ПЛК Beckhoff с временем цикла 1 мс, загрузка процессора увеличилась всего на 2-3%. Я уверен, что код работает достаточно быстро на любом современном ПЛК, если он имеет FPU двойной точности.
Я нашел способ элегантно сформулировать математическую задачу для общего решения только с ограничением по рывкам. Это позволяет очень быстро решить проблему. Код полностью написан на C, и на ноутбуке 8-летней давности программа может вычислять 100 000 полных общих решений каждую секунду. Я тестировал его на ПЛК Beckhoff с временем цикла 1 мс, загрузка процессора увеличилась всего на 2-3%. Я уверен, что код работает достаточно быстро на любом современном ПЛК, если он имеет FPU двойной точности.
Питер Нахтвей
15 марта 2019 г., 14:34
Чико, я не думаю, что вам следует называть параметры ограничений. В моем примере целевая скорость изначально равна 12, а пользователь дает команду скорости 10. Давать команду движения с более низкой скоростью должно быть приемлемо. Кроме того, вы должны добавить средства увеличения и уменьшения чисел с помощью мыши, как мой генератор целей. Это облегчает проведение тестирования.
Но даже в исправленной версии генератор траекторий может вести себя не так, как вы ожидаете.
Вот здесь становится интересно. Почему должна быть разница? Если есть разница, то чье решение лучше?
Что касается скорости. Это начальная команда, которая занимает большую часть времени. После этого все очень распланировано. Я стараюсь отложить как можно больше вычислений, потому что нет смысла вычислять все только для того, чтобы пользователь выдал новую команду, где все предыдущие вычисления бесполезны.
Когда я получаю контроллер движения конкурента, я тестирую целевой генератор. Часто это трудно сделать, потому что у них обычно нет такого приятного интерфейса, как у меня или у вас.
Я дома. В понедельник буду искать другую ошибку.
cheeco
15 марта 2019 г., 18:12
Дорогой Питер, иногда формулировка, которую я использую, немного небрежна. Я также новичок в веб-программировании, поэтому даже, по общему признанию, базовый интерфейс меня уже утомил :rolleyes: — Я не планирую обновление в ближайшее время.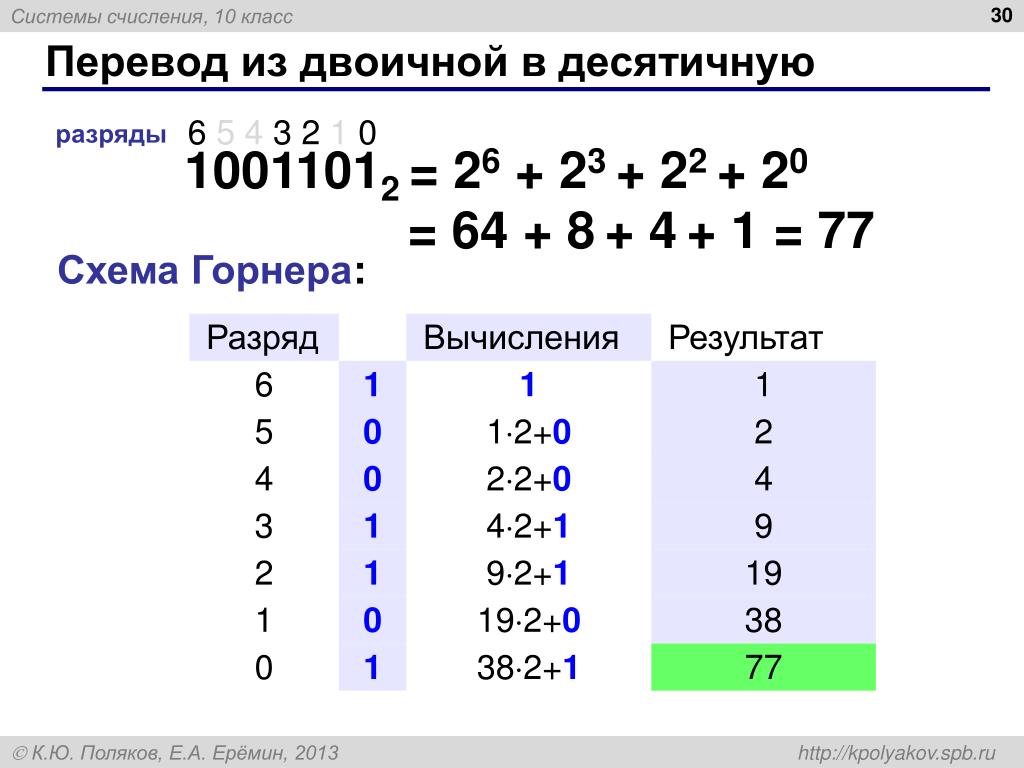
Вопрос о том, как вести себя вне границ движения, действительно сложный. Моя философия заключалась в том, чтобы установить ошибку и остановить движение с заданными границами рывка/ускорения. Это чисто, это просто и (надеюсь) ведет к определенному ожидаемому поведению. Были бы возможны и другие варианты, например, сначала войти в параметры движения, а затем продолжить движение, но я отказался от них.
Касательно скорости: Как вы знаете, в основном есть 2 разные проблемы. Первый сложный: решить, какой тип траектории является правильным, и рассчитать правильное время переключения. Как только эта проблема решена, можно заняться второй проблемой: оценка значений траектории для произвольных временных шагов. Эта задача — по сравнению с первой — очень проста, так как она снова и снова вычисляет линейные, квадратичные и кубические функции.
Генератор траекторий, который я разработал, может решить первую, сложную задачу — решить, какая траектория является наилучшей для заданных начальных и целевых значений и заданных границ движения, рассчитать время переключения и, наконец, оценить траекторию — со скоростью ~100000 /s на стандартном ПК, что позволяет генерировать и оценивать траекторию в реальном времени.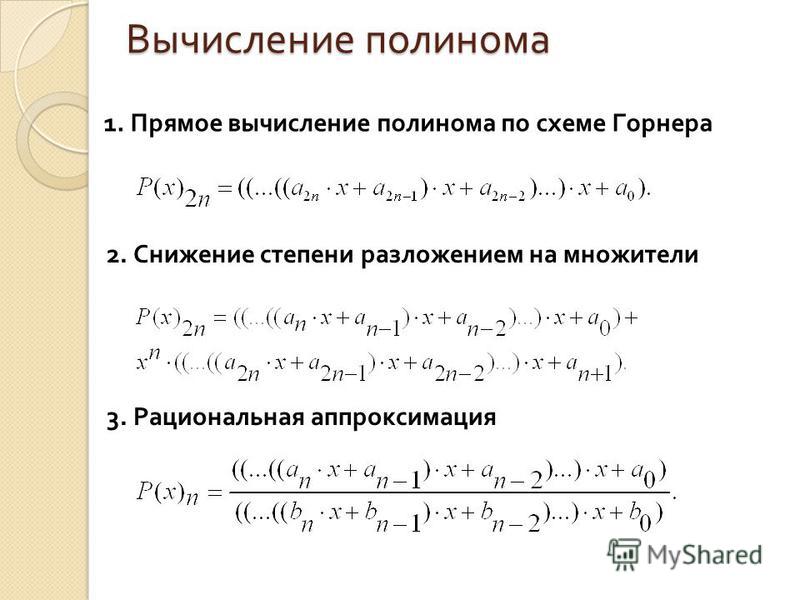
Одной из приятных функций является генерация траекторий на лету: вместо расчета всей траектории вы можете просто рассчитать следующий временной шаг. Вычисленный вектор будет начальным вектором для следующей итерации. Хотя технически это не является абсолютно необходимым, этот итеративный подход приводит к очень элегантному стилю программирования.
Но мне также очень интересно, как в настоящее время решается проблема траекторий с ограничением по рывкам в промышленности. Так как я непосредственно автоматикой не занимаюсь, то мне очень интересно, как решается задача на практике!
Питер Нахтвей
16 марта 2019 г., 13:56
Дорогой Питер, иногда формулировка, которую я использую, немного небрежна. Я также новичок в веб-программировании, поэтому даже, по общему признанию, базовый интерфейс меня уже утомил :rolleyes: — Я не планирую обновление в ближайшее время.
Должен признать. Я не занимаюсь окнами. Кто-то другой написал интерфейс для меня, но через некоторое время мне пришлось отредактировать программу, чтобы она делала то, что я хочу.
Часть Windows является основной программой. Код моего целевого генератора — это DLL.
Вопрос о том, как вести себя вне границ движения, действительно сложен. Моя философия заключалась в том, чтобы установить ошибку и остановить движение с заданными границами рывка/ускорения.
Не могу этого сделать. Настоящий контроллер движения должен иметь положительные и отрицательные пределы, но это все. То, что вы называете ограничениями, следует рассматривать как параметры команды, которые будут предоставлены пользователем. Вы должны позволить пользователю передумать в любое время и указать новые параметры команды.
Это чисто, просто и (надеюсь) ведет к определенному ожидаемому поведению. Были бы возможны и другие варианты, например, сначала войти в параметры движения, а затем продолжить движение, но я отказался от них.
Я не знаю, что подразумевается под «первым определением параметров движения»
Относительно скорости: Как вы знаете, есть две принципиально разные проблемы.
Только 2? 🙂
Первый сложный: Решите, какой тип траектории является правильным
Я называю это профилем. Вы можете видеть, что в каталоге, который я разместил, у меня есть такие имена, как seg1234567
.
Где
сегмент 0 остановлен
сегмент 1 ускоряется с рывком >0
сегмент 2 ускоряется с рывком =0
сегмент 3 ускоряется с рывком < 0
сегмент 4 — постоянная скорость
сегмент 5 замедляется с рывком < 0
сегмент 6 замедляется с рывком = 0
сегмент 7 замедляется рывком > 0
Я включил эту информацию для остальной части форума.
Cheeco необходимо добавить эти случаи ниже.
сегмент 8 — это особый случай, когда текущая траектория выше, чем команда. Это тот случай, который вы видите на моей последней фотографии.
сегмент 9похож на сегмент 8, за исключением того, что текущая траектория намного более отрицательна, чем текущая команда.
и рассчитайте правильное время переключения.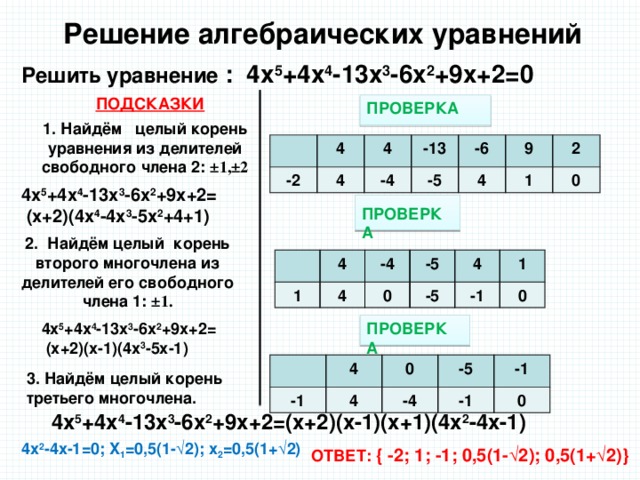
Как только эта проблема решена, можно заняться второй проблемой: оценка значений траектории для произвольных временных шагов. Эта задача — по сравнению с первой — очень проста, так как она снова и снова вычисляет линейные, квадратичные и кубические функции.
Есть много вещей, которые нужно решить сразу.
Генератор траекторий, который я разработал, может решить первую, сложную задачу — решить, какая траектория является наилучшей для заданных начальных и целевых значений и заданных границ движения, рассчитать время переключения и, наконец, оценить траекторию — со скоростью ~100000 /s на стандартном ПК, что позволяет генерировать и оценивать траекторию в реальном времени.
Вот как я проводил тестирование, но стандартный ПК потребляет много энергии и требует значительного охлаждения. Код должен эффективно работать на чем-то менее похожем на процессор ARM.
Одной из приятных функций является генерация траекторий на лету: вместо расчета всей траектории вы можете просто рассчитать следующий временной шаг.
Это то, чем мы занимаемся. У нас с тех 1980-х гг. Пользователь должен иметь возможность передумать. Скорее всего, это будет мастер-компьютер, который вычисляет новые позиции для перехода во время движения.
Вычисленный вектор будет начальным вектором для следующей итерации. Хотя технически это не является абсолютно необходимым, этот итеративный подход приводит к очень элегантному стилю программирования.
Необходим для реального продукта управления движением. Важно делать минимально необходимое на каждой итерации по двум причинам. Вы не можете тратить слишком много времени, когда дана команда, и вы не хотите вычислять весь профиль движения в первой итерации, когда пользователь или главный компьютер изменит свои параметры команды.
Но мне также очень интересно, как в настоящее время решается проблема траекторий с ограничением по рывкам в промышленности. Так как я непосредственно автоматикой не занимаюсь, то мне очень интересно, как решается задача на практике!
Продам контроллеры движения.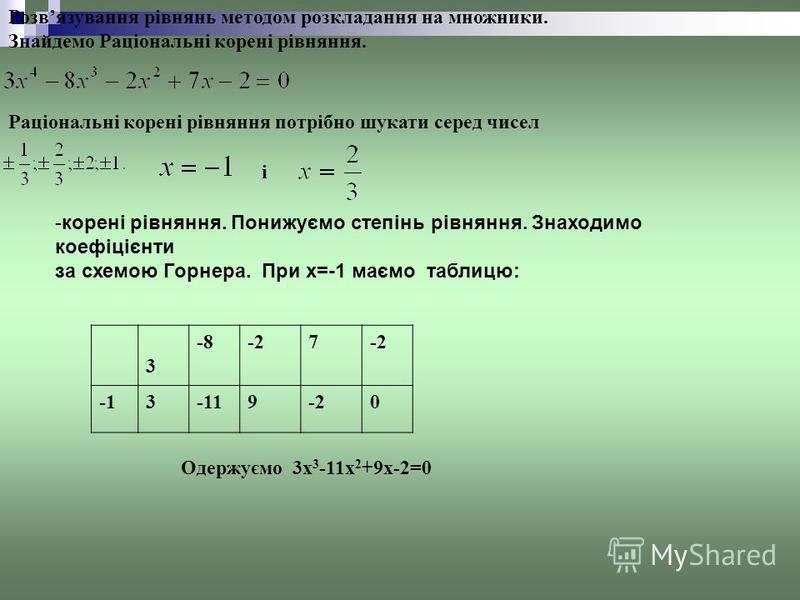
[/quote]
Я показал и рассказал вам многое. Ты на правильном пути. Теперь вы должны решить, как далеко вы хотите зайти.
Я могу сделать видео об этом. Интересно посмотреть, как меняются профили движения при изменении параметров команды.
cheeco
16 марта 2019 г., 17:31
Это правда, что сегменты 8 и 9 не реализованы так, как вы их реализовали.
Я также посмотрел на ваш графический интерфейс и нашел его очень привлекательным. Интересно, сколько общих элементов есть у наших решений, несмотря на разные пути развития!
Присмотревшись к вашим сообщениям, я понял, что пропустил много информации, которую вы написали в первый раз (возможно, потому, что я был занят поиском ошибки).
Вы упомянули, что пишете статьи о контроллере движения. Доступны ли эти статьи в Интернете или в журнале? Было бы очень интересно прочитать мнения экспертов по теме!
Из ваших сообщений я также понял, что контроллер движения и ПЛК на самом деле являются двумя разными устройствами (хорошо, теперь, когда я прочитал это снова, это вроде как очевидно). Но что то я до сих пор не совсем понимаю как выглядит ваш сетап. Я понял, что контроллер движения запускает генератор целей (отсюда и *.dll). Передаются ли вычисленные точки траектории затем в ПЛК, который выполняет фактический контур управления? Где и как программное обеспечение Windows вступает в игру?
Но что то я до сих пор не совсем понимаю как выглядит ваш сетап. Я понял, что контроллер движения запускает генератор целей (отсюда и *.dll). Передаются ли вычисленные точки траектории затем в ПЛК, который выполняет фактический контур управления? Где и как программное обеспечение Windows вступает в игру?
Также ясно, что результаты производительности, которые я получил, будут выглядеть совсем по-другому на встроенном устройстве. Когда вы говорите о процессоре класса ARM, вы имеете в виду вычислительную мощность обычного ПЛК или обычного контроллера движения? В настоящее время я планирую перенести свой код на STM32, чтобы увидеть, где я получу производительность.
Меня по-прежнему очень интересуют ваши тесты. Сегодня я нашел основную причину обнаруженной вами ошибки, но мне потребуется несколько дней, чтобы внести исправление и тщательно протестировать новую версию.
Спасибо за поддержку!
Peter Nachtwey
16 марта 2019 г., 18:44
Интересно, сколько общих элементов имеют наши решения, несмотря на разные пути развития!
Думаю, это логично.
Вы упомянули, что пишете статьи о контроллере движения. Доступны ли эти статьи в Интернете или в журнале? Было бы очень интересно прочитать мнения экспертов по теме!
В основном о гидравлическом управлении движением. Существуют некоторые существенные различия между электрическим сервоприводом и гидравлическим сервоприводом.
В основном я пишу об алгоритмах замкнутого цикла.
Из ваших сообщений я также понял, что контроллер движения и ПЛК на самом деле являются двумя разными устройствами (хорошо, теперь, когда я прочитал это снова, это вроде как очевидно).
Да, мы видим различия, потому что знаем, что нужно для создания целевого положения, скорости и ускорения. Нас все время спрашивают, зачем им покупать контроллер движения? «Разве я не могу сделать это в ПЛК?»
Но что то я пока не совсем понял как выглядит ваш сетап. Я понял, что контроллер движения запускает генератор целей (отсюда и *.dll). Передаются ли вычисленные точки траектории затем в ПЛК, который выполняет фактический контур управления? Где и как программное обеспечение Windows вступает в игру?
Контроллер движения работает под управлением операционной системы реального времени от компании Green Hills.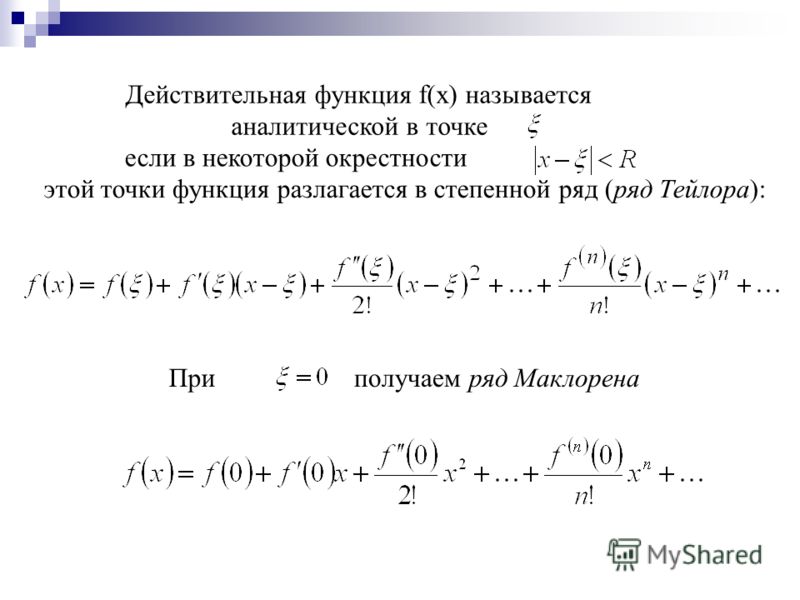
https://www.ghs.com/
Код находится во флэш-памяти, но для более быстрого выполнения копируется в оперативную память. Самые быстрые ПЛК делают то же самое.
Также ясно, что результаты производительности, которые я получил, будут выглядеть совсем по-другому на встроенном устройстве. Когда вы говорите о процессоре класса ARM, вы имеете в виду вычислительную мощность обычного ПЛК или обычного контроллера движения? В настоящее время я планирую перенести свой код на STM32, чтобы увидеть, где я получу производительность.
Разница между ПЛК и контроллерами движения размыта. Основное отличие ПО и то, чему отдается приоритет. Наши контроллеры и использовались в качестве ПЛК или в качестве единственного управляющего устройства в машине. Однако контроллер движения должен в значительной степени придерживаться управления движением. ПЛК не обязательно должны быть детерминированными и должны поддерживать более широкий спектр устройств ввода-вывода и гораздо большее количество операций ввода-вывода.
Меня по-прежнему очень интересуют ваши тесты. Сегодня я нашел основную причину обнаруженной вами ошибки, но мне потребуется несколько дней, чтобы внести исправление и тщательно протестировать новую версию.
Спасибо за поддержку!
Вы увидите больше на следующей неделе, когда я вернусь в офис.
Я отправил вам личное сообщение с дополнительной информацией.
cheeco
17 марта 2019 г., 15:58
Дорогой Питер,
Я загрузил исправленную версию генератора траекторий. Первая часть траектории теперь выглядит идентично вашему тестовому примеру. Как было сказано ранее, в моей реализации нарушение граничных условий (или параметров) приводит к остановке движения.
OJET-online Testcase (https://www.trajectorygenerator.com/ojet-online/?xs0=-0.5&xt0=0&xs1=12&xt1=0&xs2=10&xt2=0&xp0=1000&xn0=-1000&xp1=10&xp2=100=xp3=1000tv&ecmode =nt&ntdt=10000#start)
Peter Nachtwey
17 марта 2019 г. , 19:02
, 19:02
Чико, у меня есть еще много тестовых случаев, к которым я приступлю завтра, но если ваш целевой генератор работает, вы можете зарабатывать деньги, продавая целевой генератор для компаний, которые хотят сделать контроллер движения. Это похоже на то, как Codesys продает программу релейной логики ПЛК компаниям, которые хотят иметь ПЛК, но не имеют ресурсов для создания собственного программного обеспечения релейной логики.
Я впечатлен тем, что вы делаете это из страсти, просто чтобы узнать или сделать это. У немногих есть эта страсть. Страсть — это то, что отличает лучшее от очень-очень хорошего.
Кстати, я использовал Mathcad для создания большинства своих формул. Mathcad устарел и устарел, но я использую его уже более 25 лет, так что я знаю, что это дьявол. В примере, который я привел выше, использовался wxMaxima. Я также использовал Mathematica для решения самых сложных задач. Какое программное обеспечение вы использовали для создания формул?
Peter Nachtwey
18 марта 2019 г. , 17:34
, 17:34
Я проверил еще несколько случаев, включая самый сложный с 6 уравнениями и 6 неизвестными, который использовал Роберт Льюис. Получаем те же ответы.
Решение этой последней проблемы тем способом, который я сделал, дает явное решение. Это работает, но очень сложно. Вы немного открыли мне глаза. Я собираюсь попробовать итерацию, чтобы посмотреть, работает ли она. Проблема с итеративными решениями заключается в том, что они требуют времени, которого у меня нет в контроллере движения, где время расчета должно быть относительно детерминированным.
Что можно улучшить?
Я понимаю, что мне нужно изменить свой HMI. Мне нужно добавить время в столбец для значений курсора. Мне пришлось вернуться к своему рабочему листу Mathcad, чтобы провести точное сравнение, потому что мой HMI не отображает время. Мне также нужен способ размещения курсора в определенное время, потому что разрешение моего курсора ограничено пикселями.
Cheeco должен допускать разное ускорение и замедление. Часто люди хотят замедляться медленнее, чем ускоряться.
Часто люди хотят замедляться медленнее, чем ускоряться.
Отличная работа!!!!
tandempace
15 апреля 2019 г., 18:54
Петр, спасибо за полезные формулы. Им легко следовать, и они очень полезны для проекта автоматизации, над которым мы работаем.
Я также хочу иметь возможность рассчитать время ускорения, когда я знаю начальную скорость, учитывая ускорение и рывок, а также расстояние, пройденное за это движение.
Спасибо
Майкл
jast.313
5 апреля 2020 г., 20:11
Между тем, просто чтобы люди здесь знали, что для этого нужно, предоставим эту ссылку. https://deltamotion.com/peter/Maxima/Seg1234567.html
Даже простой случай требует решения 17 уравнений для 17 неизвестных! Попробуйте решить это в ПЛК!
Хорошая работа!
Питер, я попробовал эту ссылку и вижу, что для этого требуется вход в систему. Я хотел бы увидеть 17 уравнений. Есть ли возможность открыть это?
Есть ли возможность открыть это?
Спасибо,
Джас
directmotion.com
Peter Nachtwey
5 апреля 2020 г., 21:52
Завтра мой ИТ-специалист проверит это.
Кстати, мы сделали тот же ход в S7-1500. S7-1500 не обеспечивает оптимальной траектории движения с ограничением по времени рывка. Бьюсь об заклад, немногие контроллеры движения обеспечивают оптимальную траекторию движения.
userbeware
7 апреля 2020 г., 05:33
Питер, я попробовал эту ссылку и вижу, что для этого требуется вход в систему. Я хотел бы увидеть 17 уравнений. Есть ли возможность открыть это?
Спасибо,
Джас
directmotion.com
Также интересно взглянуть на эти эквалайзеры, если это возможно. Впечатляющая работа, Чико, честная игра.
Спасибо!
Peter Nachtwey
7 апреля 2020 г., 09:33
Вы должны перейти по ссылке и увидеть уравнения.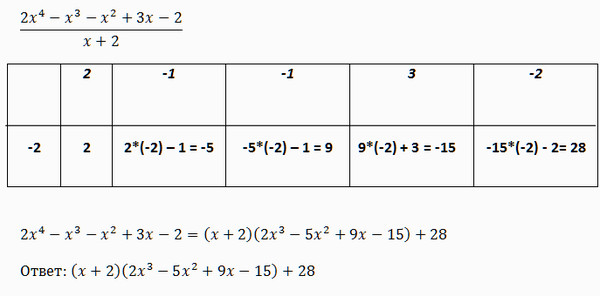 В обычном движении нет ничего особенного. Проблема намного усложняется, если перемещение настолько короткое, что заданные скорость и ускорение не достигаются.
В обычном движении нет ничего особенного. Проблема намного усложняется, если перемещение настолько короткое, что заданные скорость и ускорение не достигаются.
Обычно имеется 7 сегментов/состояний движения от 1 до 7. Сегмент 0 — это состояние остановки.
drbitboy
7 апреля 2020 г., 11:32
Привет, Питер,
Итак, входные параметры:
||j||, максимальная величина рывка
||a||, максимальное ускорение/ величина замедления
||v||, максимальная скорость
x7, x0, (или x7 = пройденное расстояние, и предположим, что x0 равно нулю)
v0, v7 (иногда*, но не обязательно оба нуля?)
a0, a7 (тот же случай: ноль как v0, v7?)
И вычисляет время (или время) и/или расстояние как функцию времени.
Примерно так?
Спасибо
* Я изменил «обычно» на «иногда» — случай [v0=v7=0] или нет, я подозреваю, будет зависеть от приложения.
jast.313
7 апреля 2020 г.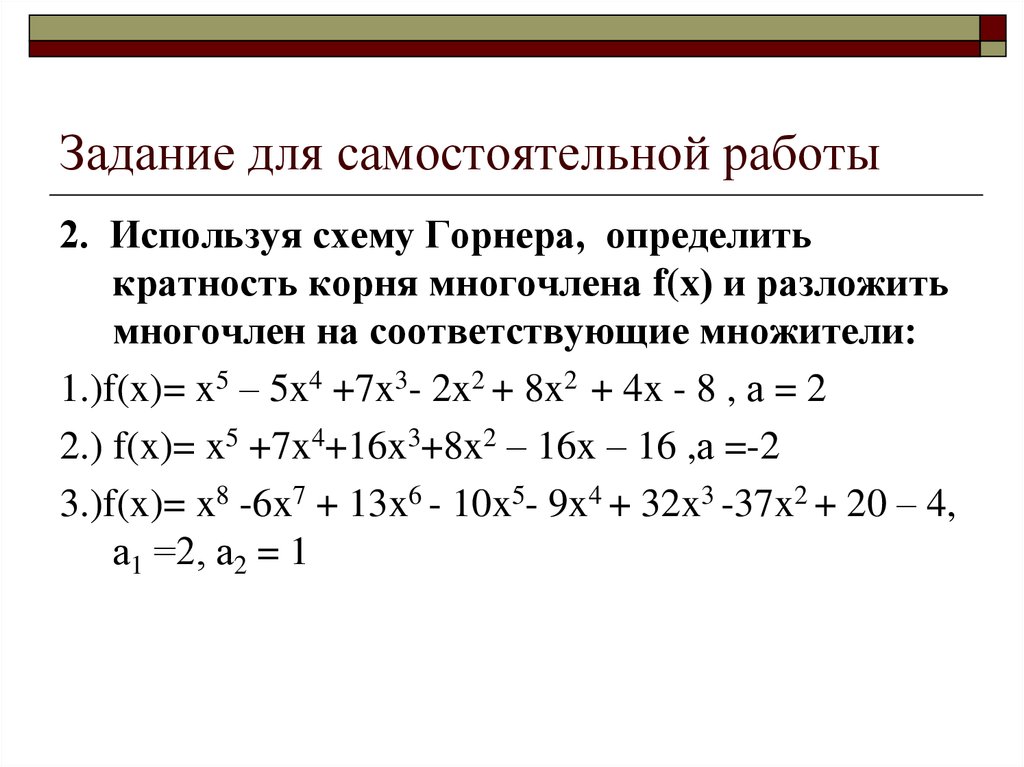 , 13:27
, 13:27
Питер, вы проделали действительно большую работу… » во время выполнения, часто в середине хода… это означает, что «v» и «t0-t7» не являются постоянными на протяжении всего хода (что меняет x1,x2,x3 и т.д…)… Очень сложно. Вы работали в подобных ситуациях? Peter Nachtwey 7 апреля 2020 г., 13:40 Привет Питер, Итак, входные параметры ||j||, максимальная величина рывка И он решает для времени (или времени) и/или расстояния как функции времени. Примерно так? Спасибо * Я изменил «обычно» на «иногда» — случай [v0=v7=0] или нет, я подозреваю, будет зависеть от приложения. Любое дело, которое может возникнуть, должно рассматриваться правильно. Моя графическая программа в посте №6 отлично подходит для тестирования, но у меня есть другая версия без интерфейса, которая протестировала 200 триллионов, да триллионов комбинаций ходов. На работе мы называем это любой PVA к любой PVA. PVA = положение, скорость и ускорение. Peter Nachtwey 7 апреля 2020 г., 14:03 Питер, вы проделали действительно большую работу… ЧПУ требует интересной функции «отмены скорости подачи», когда оператор изменяет запрограммированную «v» во время выполнения, часто в середине хода. Очень сложно. Вы работали в подобных ситуациях? Никто этого не поймал. Мы изучаем другие контроллеры. У меня есть несколько тестов, которые я использую, чтобы найти неоптимальное движение. Так какое это имеет значение? Скажем, например, у вас есть летучие ножницы или отрезной станок. После того, как разрез сделан, резак должен быстро втянуться, чтобы получить показания для следующего разреза. Экономия десятой доли секунды может иметь большое значение для производства. Кроме того, замедление до нулевой скорости сокращает пройденное расстояние и экономит энергию. Детали, детали. Для типа движения ЧПУ мы можем изменить скорость подачи на лету. Мы можем сделать это в 2 или 3 измерениях. У меня есть пример, но я не меняю скорость подачи, но это самая простая часть. https://deltamotion. jeffersonhui 13 мая 2022 г., 10:57 Да, хороший контроллер может эффективно переходить с любого PVA на любой PVA. Смотри пост №6. В этом примере выдается команда на остановку, но команда замедления ограничивает замедление, поэтому движение должно выйти за пределы допустимого и вернуться обратно. Это движение НЕ оптимизировано. Посмотрите на время 1,32 секунды. В это время движение останавливается, а затем начинает ускоряться до заданного значения 0,0,0. Это не оптимально, потому что ускорение тоже ушло в 0. Это пустая трата времени. Вы можете видеть, что серая линия (ускорение) является отрицательной примерно до момента времени 1,23, а затем ускорение становится менее отрицательным, пока не станет равным нулю в момент времени 1,32. Мы называем это реверсом рампы. Оптимальный реверс рампы будет поддерживать ускорение -100 во время замедления, а затем продолжать обратно до -200 примерно через 1,5 секунды. Никто этого не поймал. Мы изучаем другие контроллеры. У меня есть несколько тестов, которые я использую, чтобы найти неоптимальное движение. Так какое это имеет значение? Скажем, например, у вас есть летучие ножницы или отрезной станок. После того, как разрез сделан, резак должен быстро втянуться, чтобы получить показания для следующего разреза. Экономия десятой доли секунды может иметь большое значение для производства. Кроме того, замедление до нулевой скорости сокращает пройденное расстояние и экономит энергию. Детали, детали. Для типа движения ЧПУ мы можем изменить скорость подачи на лету. Мы можем сделать это в 2 или 3 измерениях. У меня есть пример, но я не меняю скорость подачи, но это самая простая часть. https://deltamotion.com/peter/Maxima/feedspeed.html Извините, что поднимаю ветку двухлетней давности, но похоже, что ваши ссылки на Delta Motion не работают. Peter Nachtwey 13 мая 2022 г., 16:06 Привет, Питер, Извините, что оживляю ветку двухлетней давности. но похоже, что ваши ссылки Delta Motion сейчас не работают. Сможете ли вы их исправить? Я тоже с трудом решаю уравнения 3-го порядка для рывка. Я хотел бы увидеть уравнения, которые вы решили для профиля движения по S-образной кривой, включая эту ссылку: jeffersonhui 17 мая 2022 г., 09:38 Привет, Питер, Спасибо за такой быстрый ответ. Я пытаюсь внедрить управление рывками в ПЛК Codesys, но не знаю, возможно ли это вообще. В настоящее время я получаю проблему, когда ускорение и скорость достигают 0 вместе, но положение не соответствует заданному значению из-за проблем с округлением. Я не думаю, что Codesys приспособлен для работы с матрицами или совместного решения многих уравнений, поэтому даже не знаю, смогу ли я реализовать ваш метод. Питер Нахтвей 17 мая 2022 г., 13:04 Привет, Питер, Спасибо за такой быстрый ответ. Я пытаюсь внедрить управление рывками в ПЛК Codesys, но не знаю, возможно ли это вообще. Что вы подразумеваете под контролем рывков? Рывок обычно задается пользователем. Codesys должен внедрить открытые библиотеки движения ПЛК, чтобы вам не пришлось заново изобретать велосипед. В настоящее время у меня возникает проблема, когда ускорение и скорость одновременно достигают 0, но положение не соответствует заданному значению из-за проблем с округлением. Да, это может быть огромной проблемой, но есть хитрости. Я не думаю, что Codesys приспособлен для работы с матрицами или совместного решения многих уравнений, поэтому даже не знаю, смогу ли я реализовать ваш метод… Это непростая задача. jeffersonhui 20 мая 2022 г., 09:41 Привет, Питер! Однако похоже, что не каждый ПЛК имеет библиотеки Open Motion для ПЛК? Если есть способ «скачать» библиотеки? По сути, я не уверен, как получить доступ к открытым библиотекам ПЛК для моего контроллера? Что можно сделать, чтобы ускорение, скорость и положение одновременно достигли 0? Мне трудно думать о некоторых. Peter Nachtwey 20 мая 2022 г., 15:05 Привет, Питер, Что можно сделать, чтобы ускорение, скорость и положение одновременно достигли 0? Мне трудно думать о некоторых. Это не только сложно. Это очень тяжело. Вам нужно научиться выполнять символическую обработку, как показано в ссылке. Итерация вычислений и добавление расчетов одной миллисекунды к расчетам следующей миллисекунды НЕ будут работать. Lean использовать CAS (система компьютерной алгебры). По сути, я думаю, что вы сошли с ума, пытаясь понять это. Я понятия не имею, почему Чико сделал это. Я понятия не имею, насколько оптимально решение Cheeco. Я думаю, cheeco хотел продать решение. Я сделал это, потому что моя компания продает контроллеры движения, поэтому я мог оправдать время, чтобы быть совершенным. Проще купить контроллеры движения. Очевидно, мы НЕ собираемся отдавать решение. Кстати, я не видел других контроллеров, которые могли бы найти идеальное или оптимальное решение. Повторяю. Решить проблему в потоке не только сложно. Получить идеальное решение крайне сложно. Мне потребовались годы, прежде чем я получил решение, которое, хотя и было достаточно быстрым и мне нравилось. Чико признался мне, что он тоже расстроился, и ему пришлось отложить решение проблемы на год. Много лет назад я разместил эту задачу на sci.math.symbolic, старой группе новостей. Люди могли решить эту проблему, используя wxMaxima, Mathematica или Fermat. Роберт Льюис из Фордемского университета использовал эту задачу на лекции или семинаре, чтобы показать, насколько хороша его программа Ферма. Даже в этом случае НИ ОДИН из них не мог предоставить решение, достаточно простое для использования в контроллере движения. Решения были слишком сложными и требовали слишком много времени. Наконец-то я нашел время, чтобы вручную упростить и оптимизировать решения. Да, вручную. Большая часть проблемы в том, что нужно было вычислить четвертый корень многочлена. Компьютер может найти ответ на все четыре корня, но я понял, что мне нужен только один. Это уменьшило проблему в 4 раза, и да, у меня есть метод нахождения четвертых корней по формуле. Через некоторое время вы узнаете, что есть закономерности в корнях. Опять же, пока только cheeco и я решили этот особый случай в этой теме. Их около 50. Обратите внимание, что я называю свой пример seg1234567. Это базовый ход. Также есть seg123457. Эта траектория не имеет среднего участка постоянной скорости №4. По моей ссылке показан один из самых простых случаев. Заметьте также, что спустя столько лет никто не оспорил мое требование. Любой, кто интересуется этой темой, нашел бы эту тему в Интернете. На эту тему не так много тем, поэтому найти эту будет несложно. Кстати, только подумайте о том, что могли бы сделать великие математики, такие как Эйлер, Лаплас, Фурье, Рамануян, Гаусс, Лебниц, Ньютон, Риман и т. д., если бы у них было то символическое программное обеспечение и вычислительная мощность, которыми мы располагаем сегодня? Они могли бы творить чудеса, если бы не использовали компьютеры, чтобы тратить время на видеоигры. Время поиграть в Starcraft. kamenges 20 мая 2022 г., 17:50 Первоначально отправлено Питером Нахтвеем: Кстати, просто подумайте о том, что могли сделать великие математики, такие как Эйлер, Лаплас, Фурье, Рамануджан, Гаусс, Ньютцтон, Лебниц , Риман и т. Время поиграть в Starcraft. Вот это смешно!! На самом деле Рамануджану нужно было еще 30 лет. Этот чувак оборвался. Keith 04 октября 2022 г. Привлечение инвестиций в сельские районы Альберты Правительство Альберты привержено делу восстановления экономики сельских сообществ, а Фонд инвестиций и роста помогает привлекать инвестиции что поднимет местную экономику. 29 сентября 2022 г. Обеспечение надежных рабочих мест, устойчивый доступ к древесине Два продленных соглашения об управлении лесами поддержат План восстановления Альберты с сотнями безопасных, стабильных рабочих мест и долгосрочным доступом к древесному волокну для лесозаготовок. 27 сентября 2022 г. Поддержка рабочих мест в регионах за счет безопасного доступа к древесине Обновленное соглашение о совместном управлении лесами поддерживает План восстановления Альберты, предусматривающий создание сотен стабильных рабочих мест и надежный, долгосрочный доступ к древесному волокну для лесозаготовительных компаний. 21 сентября 2022 г. День сельскохозяйственных обществ: министр Хорнер Министр сельского хозяйства, лесного хозяйства и экономического развития сельских районов Нейт Хорнер опубликовал следующее заявление по случаю Дня сельскохозяйственных обществ: Неделя продовольствия: Министр Хорнер Нейт Хорнер, министр сельского хозяйства, лесного хозяйства и экономического развития сельских районов, опубликовал следующее заявление о Неделе местных продуктов питания в Альберте: 05 августа 2022 г. Пиломатериалы хвойных пород: Министр Хорнер Министр сельского хозяйства, лесного хозяйства и экономического развития сельских районов Нэйт Хорнер опубликовал следующее заявление по результатам третьей административной проверки пиломатериалов хвойных пород: 30 июля 2022 г. День продовольствия в Канаде: заявление министра Хорнера Министр сельского хозяйства, лесного хозяйства и экономического развития сельских районов Нейт Хорнер опубликовал следующее заявление по случаю Дня продовольствия в Канаде: 07 июля 2022 г. Агропищевая промышленность процветает в Альберте Альберта достигла ключевых инвестиционных вех, привлекая почти 1,5 миллиарда долларов новых инвестиций в агропродовольственный сектор и создавая около 3000 рабочих мест для жителей Альберты с 2019 года. 13 июня 2022 г. Предлагаемые федеральные правила маркировки мяса: Совместное заявление Министр сельского хозяйства, лесного хозяйства и экономического развития сельских районов Нейт Хорнер и министр здравоохранения Джейсон Коппинг опубликовали следующие заявления о новых предлагаемых Министерством здравоохранения Канады требованиях к маркировке говяжьего и свиного фарша: 30 мая 2022 г. Растительный белок дает новые корни в Альберте PIP International, канадская агропродовольственная компания, отмечает открытие нового экспериментального предприятия по переработке гороха стоимостью 20 миллионов долларов в Летбридже. 26 мая 2022 г. Использование возможностей интеллектуальных агротехнологий Правительство Альберты поддерживает интеллектуальные и цифровые технологии для увеличения производства, снижения затрат и создания рабочих мест в агропродовольственном секторе. 20 мая 2022 г. Всемирный день пчел: Министр Хорнер Министр сельского и лесного хозяйства и экономического развития сельских районов Нэйт Хорнер опубликовал следующее заявление по случаю Всемирного дня пчел: 17 мая 20892
Я полагаю, что это также может привести к тому, что состояние сегмента будет «перемещаться назад» (то есть: если t3
||a||, максимальное ускорение /величина замедления
||v||, максимальная скорость
x7, x0, (или x7 = пройденное расстояние, и предположим, что x0 равно нулю)
v0, v7 (иногда*, но не обязательно оба нуля?)
a0, a7 ( тот же случай: ноль как v0, v7?)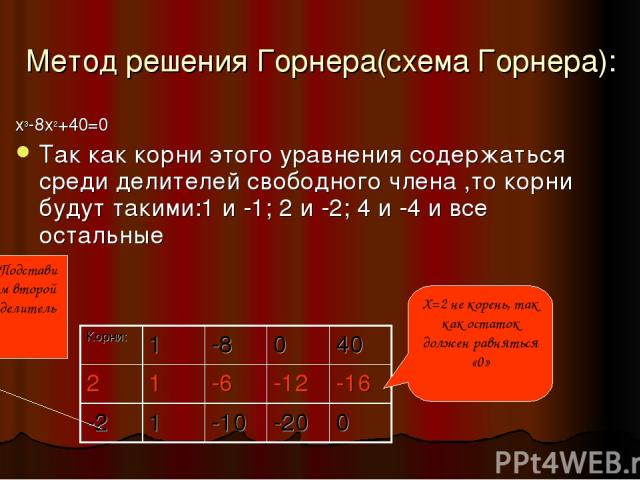
Вы правы. Обычно v0=v7=a0=a7 для перемещения от точки к точке, но часто пользователю нужно что-то изменить на лету. В лесопильном производстве часто бывает необходимо изменить конечное положение x7 при замедлении. .. это означает, что «v» и «t0-t7» не являются постоянными на протяжении всего хода (что меняет x1,x2,x3 и т.д…)…
.. это означает, что «v» и «t0-t7» не являются постоянными на протяжении всего хода (что меняет x1,x2,x3 и т.д…)…
Я полагаю, что это также может привести к тому, что состояние сегмента будет «перемещаться назад» (то есть: если t3
Да, хороший контроллер может эффективно переходить с любого PVA на любой PVA. Смотри пост №6. В этом примере выдается команда на остановку, но команда замедления ограничивает замедление, поэтому движение должно выйти за пределы допустимого и вернуться обратно. Это движение НЕ оптимизировано. Посмотрите на время 1,32 секунды. В это время движение останавливается, а затем начинает ускоряться до заданного значения 0,0,0. Это не оптимально, потому что ускорение тоже ушло в 0. Это пустая трата времени. Вы можете видеть, что серая линия (ускорение) является отрицательной примерно до момента времени 1,23, а затем ускорение становится менее отрицательным, пока не станет равным нулю в момент времени 1,32.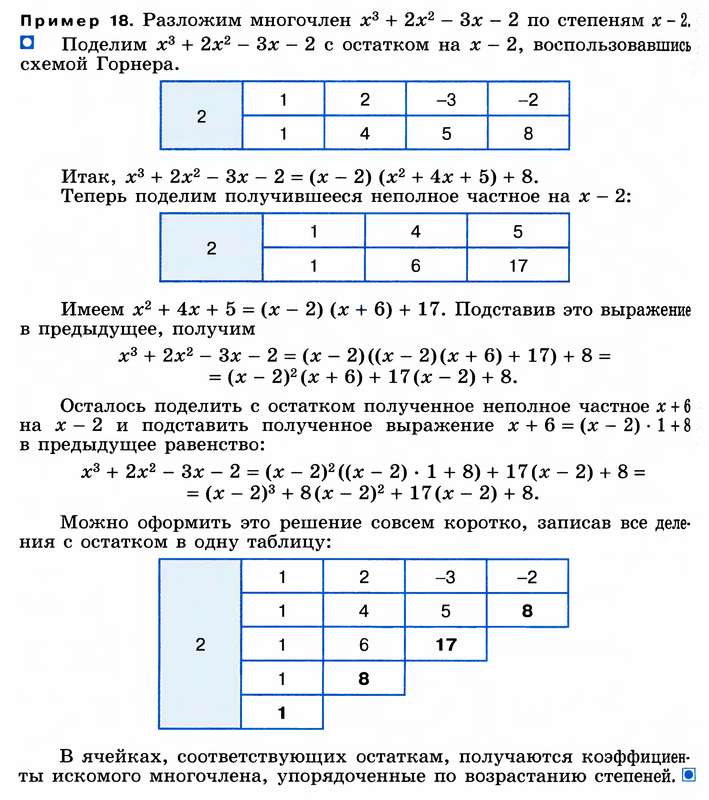 Мы называем это реверсом рампы. Оптимальный реверс рампы будет поддерживать ускорение -100 во время замедления, а затем продолжать обратно до -200 примерно через 1,5 секунды. Это сэкономит, возможно, десятую долю секунды.
Мы называем это реверсом рампы. Оптимальный реверс рампы будет поддерживать ускорение -100 во время замедления, а затем продолжать обратно до -200 примерно через 1,5 секунды. Это сэкономит, возможно, десятую долю секунды.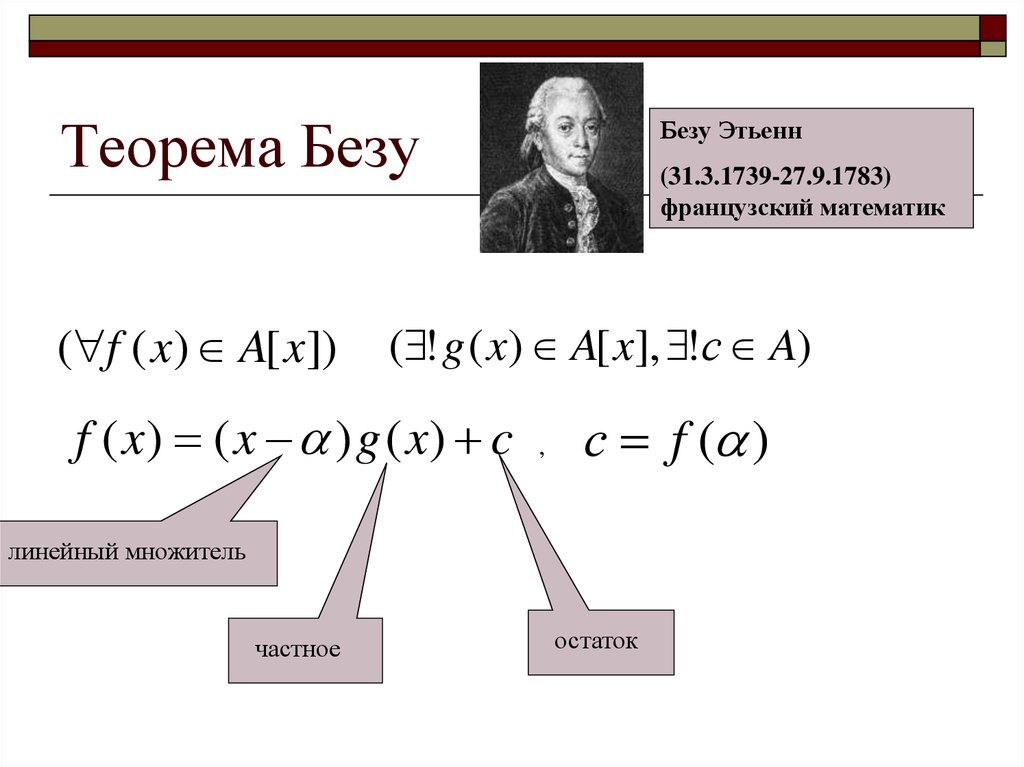 com/peter/Maxima/feedspeed.html
com/peter/Maxima/feedspeed.html
Небольшой расчет для тех, кто застрял дома, как я. Это сэкономит, возможно, десятую долю секунды.
Это сэкономит, возможно, десятую долю секунды.
Небольшой расчет для тех, кто застрял дома, как я.
Привет, Питер,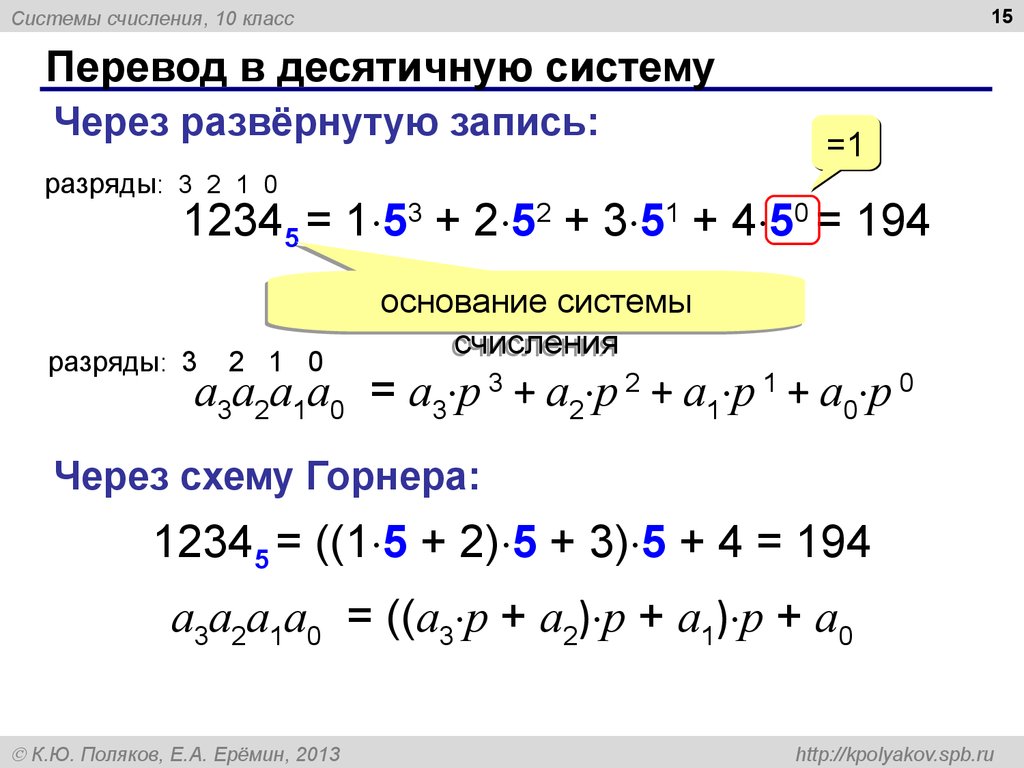 Сможете ли вы их исправить? Я тоже с трудом решаю уравнения 3-го порядка для рывка. Я хотел бы увидеть уравнения, которые вы решили для профиля движения S-образной кривой, включая эту ссылку:
Сможете ли вы их исправить? Я тоже с трудом решаю уравнения 3-го порядка для рывка. Я хотел бы увидеть уравнения, которые вы решили для профиля движения S-образной кривой, включая эту ссылку:
https://deltamotion.com/peter/Maxima/Seg1234567.html
https://deltamotion.com/peter/Maxima/Seg1234567.html
Я переименовал каталог
https://deltamotion.com/peter/wxMaxima/Seg1234567.html
Однако эта ссылка во многом связана с профилями движения 3-го порядка. Этот лучше.
https://deltamotion.com/peter/wxMaxima/Seg1234567.html
Кроме того, эта ветка охватывает очень сложный случай.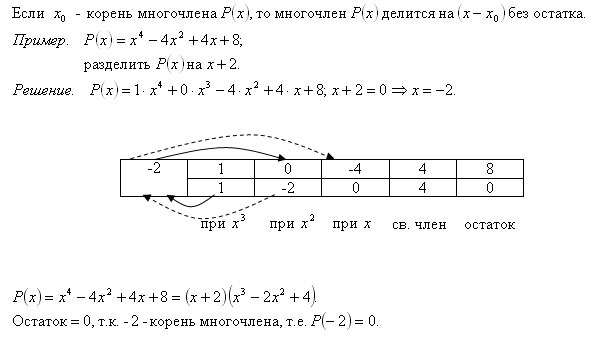 В моем примере предполагается, что достигнуты пределы ускорения и скорости. Расчеты становятся НАМНОГО сложнее, если пределы не достигнуты. Насколько я знаю, мы с Чико единственные, кто решил эту проблему так, чтобы ее можно было реализовать в контроллере движения. Решения, созданные Mathcad, Mathematica и wxMaxima, слишком длинные, чтобы быть полезными.
В моем примере предполагается, что достигнуты пределы ускорения и скорости. Расчеты становятся НАМНОГО сложнее, если пределы не достигнуты. Насколько я знаю, мы с Чико единственные, кто решил эту проблему так, чтобы ее можно было реализовать в контроллере движения. Решения, созданные Mathcad, Mathematica и wxMaxima, слишком длинные, чтобы быть полезными.
Генерация профилей движения 3-го порядка непроста, если пытаться быть оптимальным. Я не видел другого контроллера движения, который мог бы оптимально решить проблему, представленную Cheeco. ..
..
Вы не делаете этого внутри Codesys. Я использовал Mathcad, чтобы вычислить формулы, очень похожие на то, что вы видите в моей ссылке.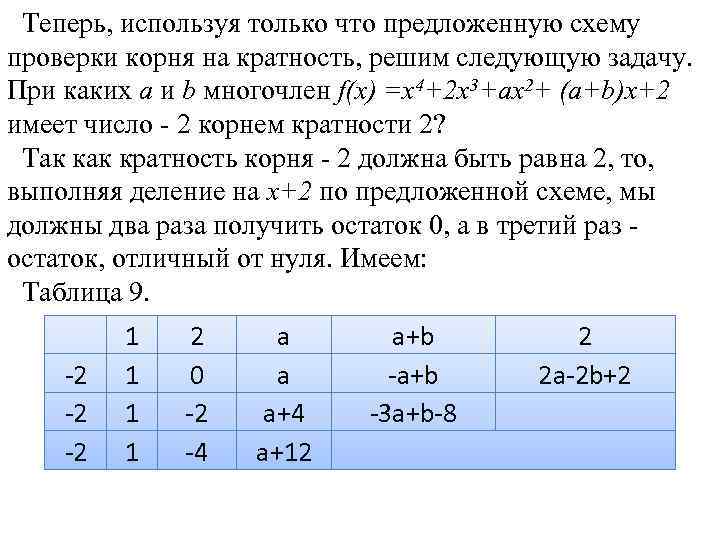 Затем я реализовал их на C, чтобы их можно было сделать частью прошивки. Вам следует попробовать создать библиотеку C для Codesys, если команды движения PLC Open не делают то, что вы хотите.
Затем я реализовал их на C, чтобы их можно было сделать частью прошивки. Вам следует попробовать создать библиотеку C для Codesys, если команды движения PLC Open не делают то, что вы хотите.
До этого я никогда не слышал о PLC Open, я бы хотел, чтобы мне не пришлось заново изобретать колесо с рывками. Однако похоже, что не каждый ПЛК имеет библиотеки Open Motion для ПЛК? Если есть способ «скачать» библиотеки? По сути, я не уверен, как получить доступ к открытым библиотекам ПЛК для моего контроллера?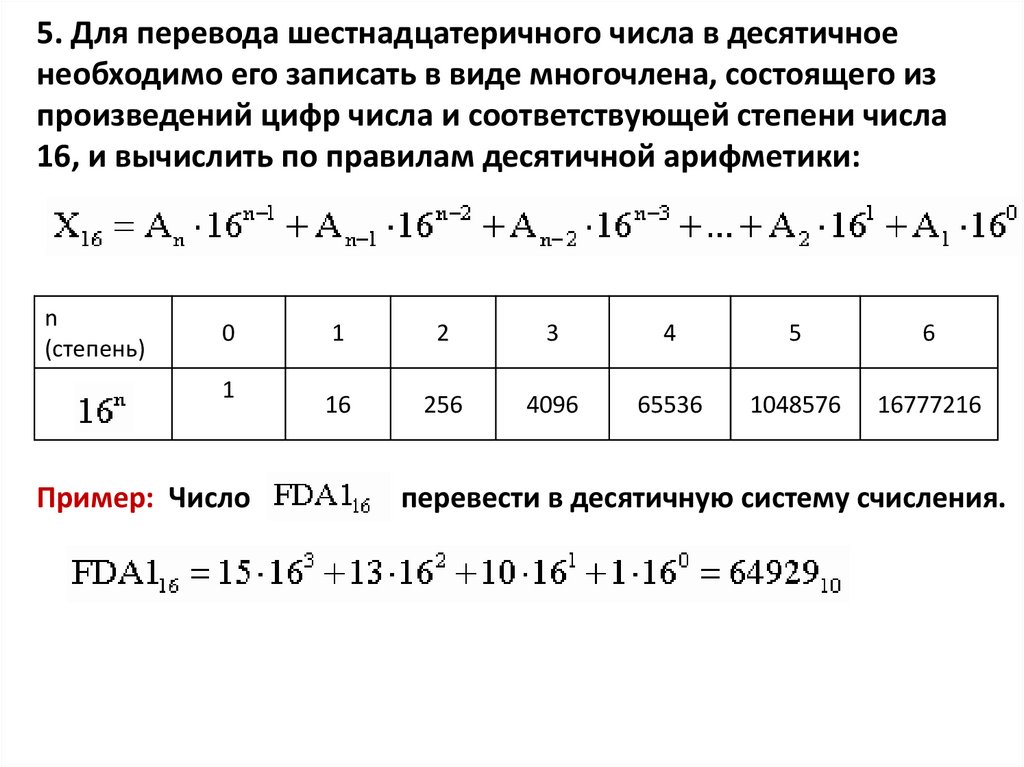
Вы смотрели на это?
https://deltamotion.com/peter/wxMaxima/Seg1234567.html
Обратите внимание на ошибку округления для t07 в %t111. Для начала вы должны использовать 64-битную математику. RMC75, RMC150 и RMC200 могут выполнять 64-битные, LREAL, вычисления с плавающей запятой. Это обязательно, даже если ПЛК может использовать только REAL.
Даже в этом случае ошибки округления приведут к потере точности, потому что все ошибки различных сегментов будут складываться, если вы не сделаете то, что я сделал в ссылке. Обратите внимание, что я вычисляю начало и конец отрезков, используя формальные выражения. Это помогает предотвратить накопление ошибок, если вы продолжаете добавлять один сегмент к другому.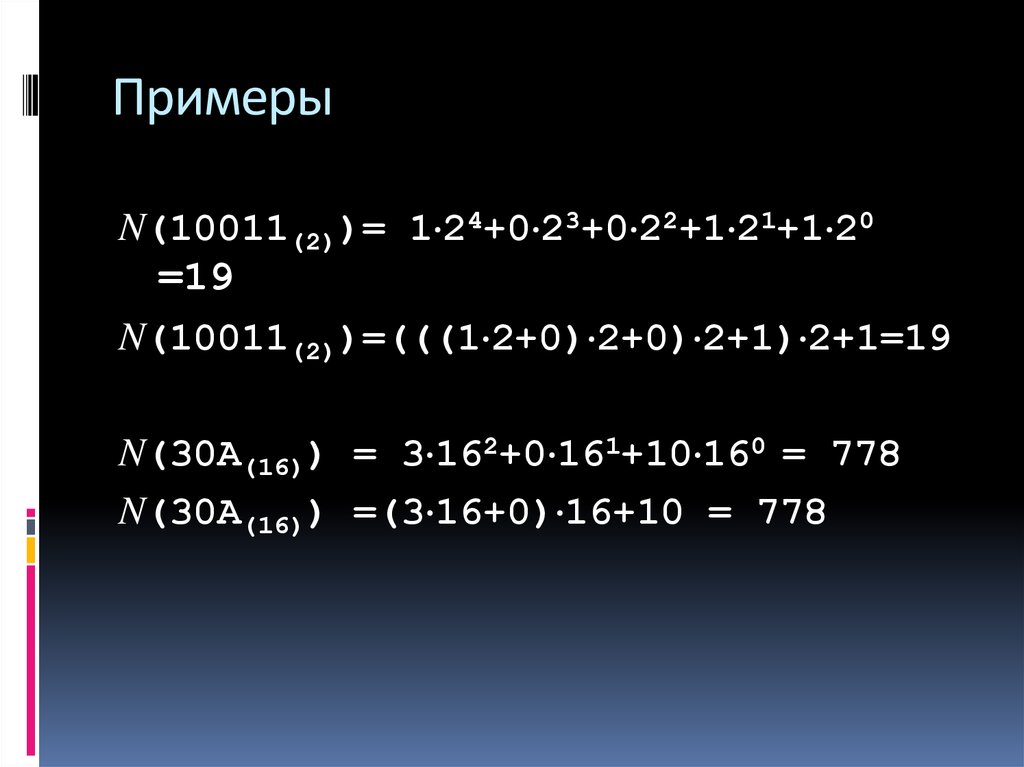 Мой пример был сделан с использованием wxMaxima. Другими являются Mathematica, Maple и Mathcad. Я сделал большую часть своей работы в Mathcad. Ссылка выше показывает, как он может решить 17 переменных, используя 17 уравнений.
Мой пример был сделан с использованием wxMaxima. Другими являются Mathematica, Maple и Mathcad. Я сделал большую часть своей работы в Mathcad. Ссылка выше показывает, как он может решить 17 переменных, используя 17 уравнений.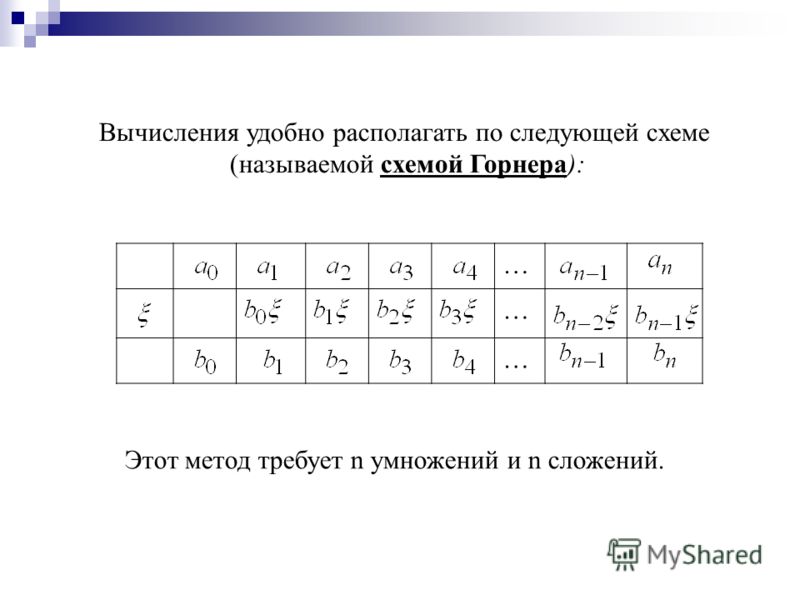
Осложнения привели к ошибкам округления.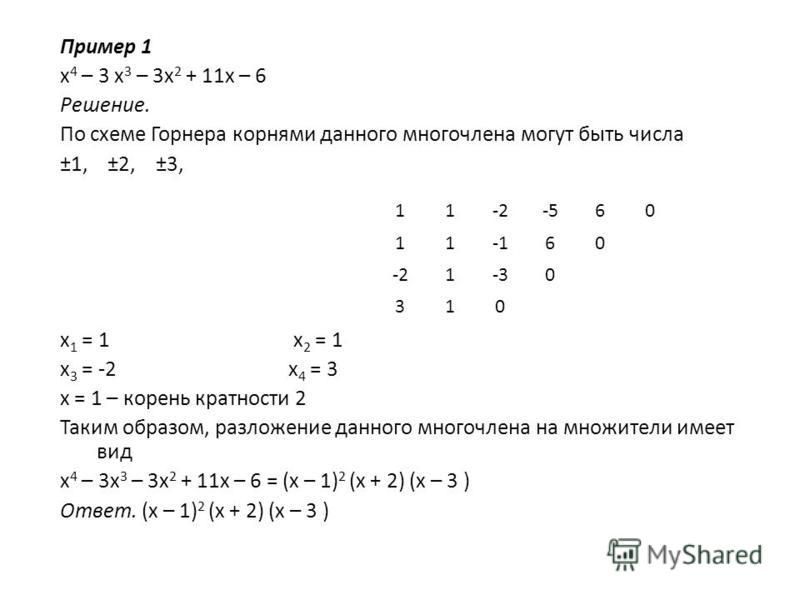
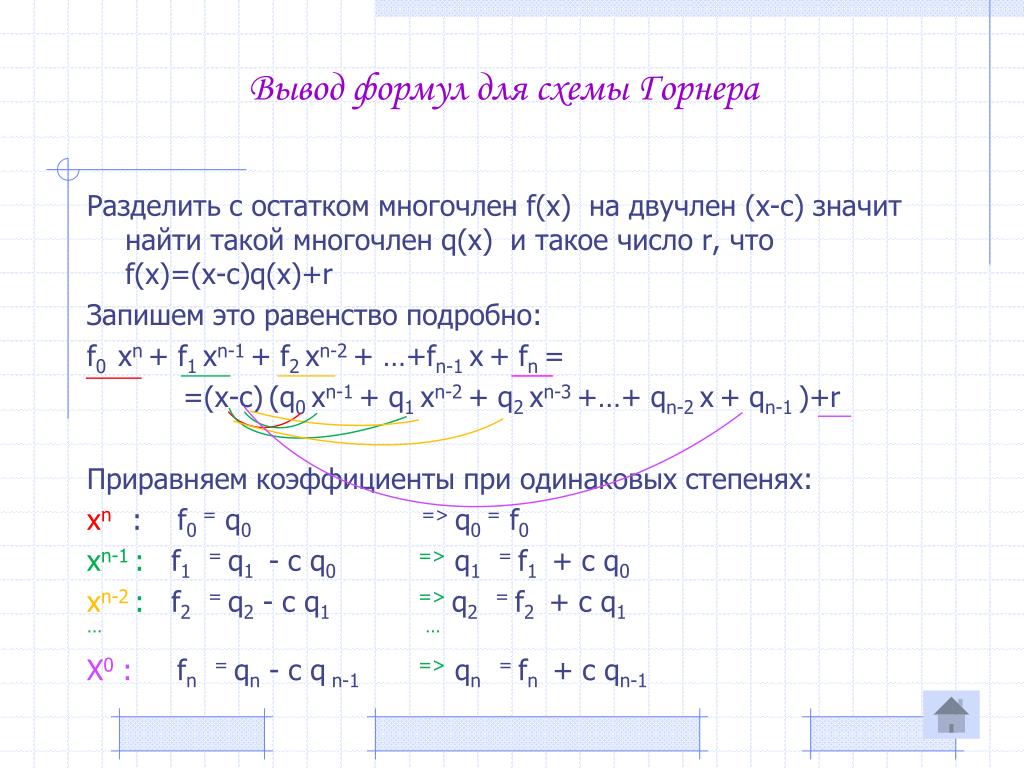 д., если бы у них было символическое программное обеспечение и вычислительная мощность, которые мы имеем сегодня? Они могли бы творить чудеса, если бы не использовали компьютеры, чтобы тратить время на видеоигры.
д., если бы у них было символическое программное обеспечение и вычислительная мощность, которые мы имеем сегодня? Они могли бы творить чудеса, если бы не использовали компьютеры, чтобы тратить время на видеоигры. Сельское хозяйство, лесоводство и экономическое развитие сельских районов
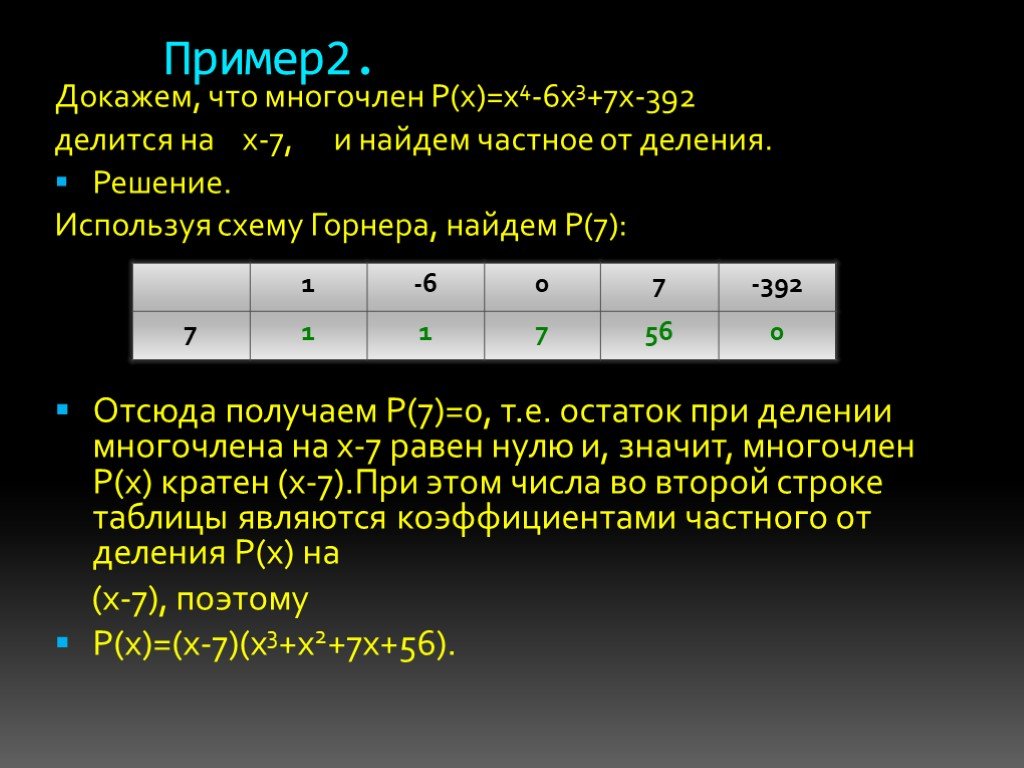


на новейшее предприятие по производству снеков
Super-Pufft, один из крупнейших в Северной Америке производителей и упаковщиков соленых снеков для розничной торговли и национальных брендов, открыл новое современное предприятие по производству картофельных чипсов в Альберте.
04 мая 2022 г.
Помощь производителям Альберты: финансирование AgriRecovery в 2021 году
Вегетационный период 2021 года был трудным для производителей Альберты, но целевая инициатива AgriRecovery была своевременной и успешной.
02 мая 2022 г.
Неделя лесов Альберты: Министр Хорнер
Министр сельского хозяйства, лесного хозяйства и экономического развития сельских районов Нэйт Хорнер опубликовал следующее заявление о Неделе лесов Альберты:
21 апреля 2022 г.
Инвестиции в конопляную промышленность провинции Альберта
В партнерстве с федеральным правительством Альберта выделила два гранта на общую сумму 900 000 долларов США для развития конопляной промышленности провинции.
12 апреля 2022 г.
Высокопатогенный птичий грипп: Министр Хорнер
Министр сельского хозяйства, лесного хозяйства и экономического развития сельских районов Нэйт Хорнер опубликовал следующее заявление о положительных случаях высокопатогенного птичьего гриппа (ВППГ) в стадах Альберты:
12 апреля 2022 г.
Новые лица присоединяются к совету AFSC
Члены совета директоров New Agriculture Financial Services Corporation (AFSC) помогут поддержать восстановление и рост экономики сельской Альберты.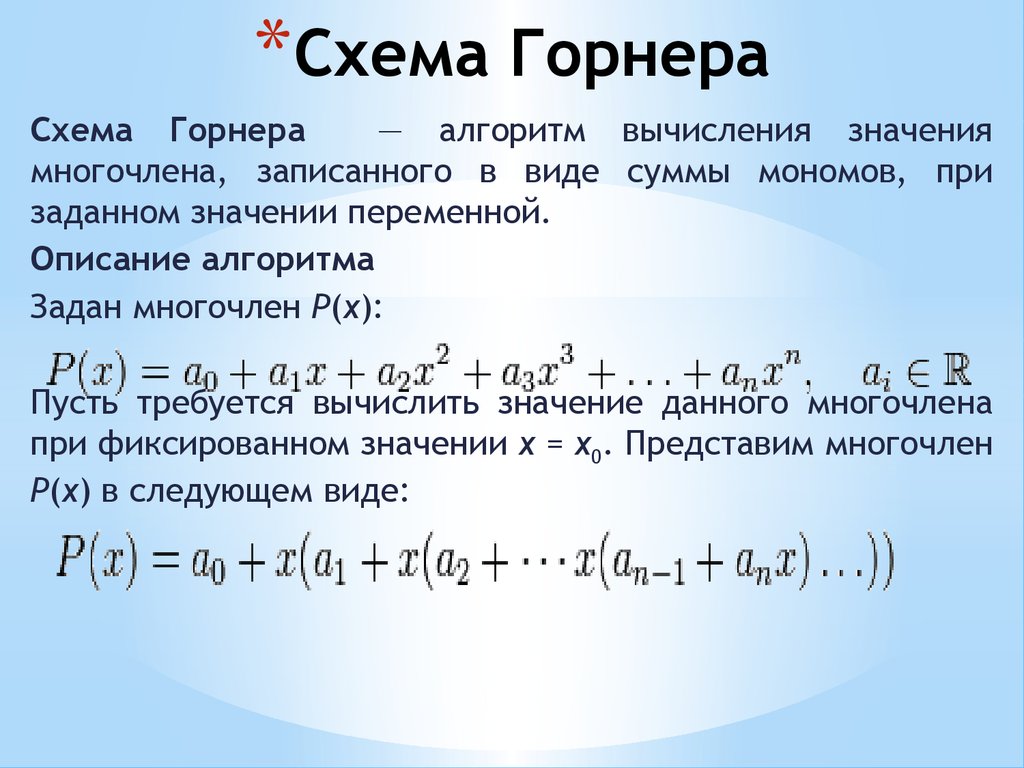
05 апреля 2022 г.
Созданное в Альберте решение для борьбы с дикими кабанями
Правительство Альберты разработало Программу борьбы с дикими кабаном для устранения угрозы, которую эти вредители представляют для сельскохозяйственных культур, домашнего скота и окружающей среды.
04 апреля 2022 г.
Информация о лесных пожарах всегда у вас под рукой
Два новых веб-приложения облегчат жителям Альберты доступ к важной информации о лесных пожарах.
15 марта 2022 г.
Обращение к лидерам и новаторам в сельском хозяйстве
Открыты номинации в Зал сельскохозяйственной славы Альберты 2022 года.
14 марта 2022 г.
Неделя безопасности сельского хозяйства Канады: Министр Хорнер
Министр сельского хозяйства, лесного хозяйства и экономического развития сельских районов Нейт Хорнер опубликовал следующее заявление о Неделе безопасности сельского хозяйства Канады:
28 февраля 2022 г.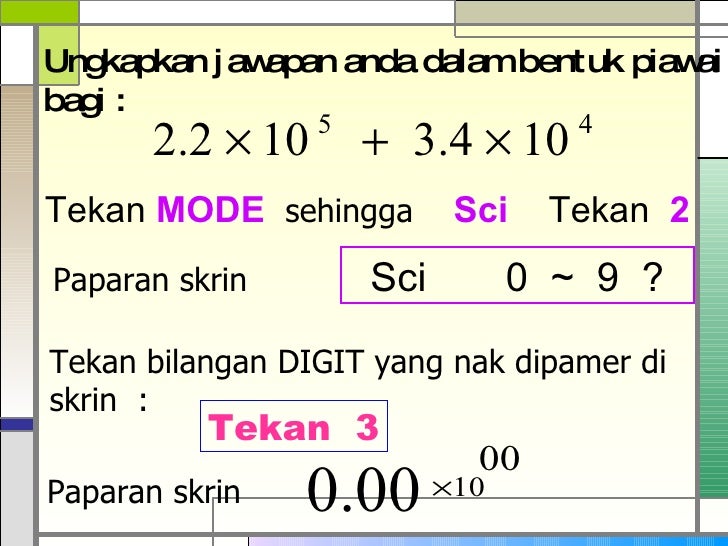
Готовность к сезону лесных пожаров 2022 г.
По всей провинции развернуты пожарные и оборудование для подготовки к предстоящему сезону лесных пожаров.
24 февраля 2022 г.
Бюджет на 2022 год: инвестиции в природные ресурсы, окружающую среду | Бюджет на 2022 год: Инвестиции в природные ресурсы и окружающую среду
Бюджет на 2022 год продвигает Альберту вперед за счет увеличения наших ресурсов, создания новых возможностей в сельском, лесном хозяйстве и энергетике и инвестирования в новые технологии для снижения выбросов.
22 февраля 2022 г.
Долгосрочные инвестиции в леса северной Альберты
Обновленное соглашение о совместном управлении лесами означает долгосрочные инвестиции в районы Невольничьего озера и Высокой прерии.
05 января 2022 г.
Следующий этап поддержки животноводов Альберты
Животноводы и пчеловоды теперь могут подать заявку на участие во втором этапе инициативы AgriRecovery по оказанию помощи животноводству Канады и Альберты в 2021 году.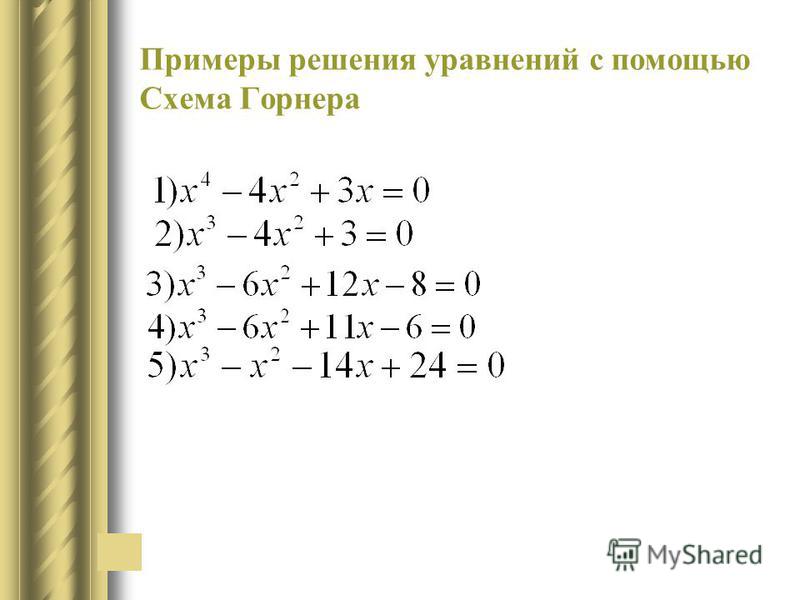
17 декабря 2021 г.
Выявлен случай атипичной коровьей энцефалопатии: Министр Хорнер
Министр сельского хозяйства, лесного хозяйства и экономического развития сельских районов Нэйт Хорнер опубликовал следующее заявление о положительном случае атипичной коровьей энцефалопатии в Альберте:
24 ноября 2021
Пиломатериалы хвойных пород: Министр Хорнер
Министр сельского хозяйства, лесного хозяйства и экономического развития сельских районов Нэйт Хорнер опубликовал следующее заявление по результатам второго административного пересмотра пиломатериалов хвойных пород:
12 ноября 2021 г.
Инвестиции в ирригацию, фермеров и рабочие места
Правительство Альберты сотрудничает с Канадским инфраструктурным банком (CIB) и 10 ирригационными районами, чтобы инвестировать в общей сложности почти 933 миллиона долларов в ирригационную инфраструктуру для расширения производства, создать рабочие места и ускорить восстановление экономики провинции.