
Решение задач на косинус и синус разности аргументов 10 класс онлайн-подготовка на Ростелеком Лицей
Рассмотрение формул косинуса и синуса разности аргументов
Выпишем 2 формулы:
— косинус разности аргументов:
,
то есть косинус разности аргументов – это сумма произведений косинусов и синусов этих аргументов.
— синус разности аргументов:
,
т. е. синус разности аргументов – это разность произведений синуса α на косинус β и косинуса α на синус β.
В задачах важно понимать, что принимать за α и β.
Задача 1 на упрощение выражения с помощью формулы синуса разности аргументов
Задача 1. Упростить .
Решение:
Принимаем 5x за α, т. е. 5xα, а 3xβ, и используем формулу синус разности аргументов.
Задача 2 на упрощение выражения с помощью формулы косинуса разности аргументов
Задача 2. Упростить.
Упростить.
Решение:
Подходит формула косинуса разности аргументов, но у нас разность произведений, поэтому преобразуем данное выражение, воспользовавшись свойством чётности функции косинус и свойством нечётности функции синус:
=
==
Мы не только упростили выражение, но и вычислили его.
Задача 3 на упрощение выражения с помощью формулы синуса разности аргументов
Задача 3. Упростить выражение .
Решение:
=
Воспользовавшись свойством чётности функции косинус и свойством нечётности функции синус, получаем:
==
=
Т.к.
, то
==
===
=
Разветвление Вычислительные задачи по теме урока
Вычислительные задачи по теме урока
Вычислить:
Решение:
Воспользуемся формулой косинус разности аргументов.
===0
Вычислить:
Решение:
Воспользуемся формулой синус разности аргументов.
==
Задача 4 на нахождение синуса и сравнение чисел с помощью формул косинуса и синуса разности аргументов
Задача 4.
Дано
Найти: a) и
Решение:
а) Рассмотрим тригонометрическую окружность (рис.1):
Рис. 1. Тригонометрическая окружность
Числом t является длина выделенной дуги.
а) =
Все величины, кроменам известны.
======
Недостающее число найдено.
==,
Т. е.
б) Сравнить поможет , если он отрицательный, число находится во второй четверти, если положительный – в первой (справа от (рис. 2).
Рис. 2. Иллюстрация к задаче
Все величины нам известны:
==
=
Это величина отрицательная, следовательно, и косинус отрицательный (расположен во второй четверти):
t.
Иногда приходится применять две формулы сразу в одной задаче.
Задача 5 на решение уравнения с помощью формул косинуса и синуса разности аргументов
Задача 5. Решить уравнение: .
Решение:
Применяем свойство чётности функции косинуса и свойство нечётности функции синуса:
==
Получили простейшее тригонометрическое уравнение.
Рис. 3. Иллюстрация к задаче
Для угла t =x+45первое множество решений даёт точка k1 (), второе множество
решений — k2 () (рис. 3).
n
n
Мы решили уравнение и нашли все его решения, их бесчисленное множество.
Подведение итогов
На данном уроке были рассмотрены формулы косинуса и синуса разности аргументов и решены типовые задачи с применением данных формул.
Список литературы
- Алгебра и начала математического анализа. 10–11 классы. В 2 ч. Ч. 1. Учебник для учащихся общеобразовательных учреждений (базовый уровень) / А. Г. Мордкович. – 10-е изд., стер. – М.: Мнемозина, 2009. – 399 с.: ил.
- Алимов А.Ш, Колягин Ю.М. и др. Алгебра и начала математического анализа. 10–11 классы. Учебник (базовый уровень).
- Карп А.П. Сборник задач по алгебре и началам анализа. 10–11 класс. – М.: Просвещение, 1995. – 176 с.
- Саакян С.М., Гольдман А.М., Денисов Д.В. Задачи по алгебре и началам анализа (пособие для учащихся 10–11 классов общеобразов. учреждений). – М.: Просвещение, 2003.
Домашнее задание
- Вычислить .
- Вычислить .
- Упростить выражение:
- Вычислить cos( + α) cos( – α) – sin(+ α) sin(– α).
Дополнительные рекомендованные ссылки на ресурсы сети Интернет
- Интернет-портал Sokolova-aa.
 ru (Источник).
ru (Источник). - Интернет-портал Urokimatematiki.ru (Источник).
- Интернет-портал Exponenta.ru (Источник).
 ru (Источник).
ru (Источник).
полиномы Чебышёва vs. ряды Маклорена / Хабр
В комментариях к моей статье про быстрое вычисление синуса был задан вопрос: «А чем не устроило разложение в ряд Тейлора?»
Краткий ответ таков: хоть приближение при помощи рядов Тейлора (точнее — рядами Маклорена) и даёт меньшую ошибку при том же количестве вычислений, но оно не позволяет разбить аргумент на произвольное количество интервалов и тем самым увеличить точность вычислений.
Теперь более подробно.
При приближении синуса (и не только) полиномами Чебышёва используют следующее выражение:
При этом коэффициенты А0, А1 и т.д. рассчитываются заранее для какого-то участка функции.
При помощи рядов Маклорена синус вычисляется по следующей формуле:
Для удобства вычислений можно вынести повторяющиеся фрагменты за скобки. Например, так:
или так:
Для примера найдём значения синуса на интервале от 0 до обоими методами, и постоим их графики вместе с графиком «настоящего» синуса.
Речь по прежнему идёт о скорости аппроксимации, поэтому оба метода будем сравнивать при примерно одинаковом количестве вычислений. То ест возьмём полином Чебышёва 2-й степени (с тремя членами), и с тем же количеством членов возьмём ряд Маклорена (получится степень 5):
График многочлена Чебышёва представляет собой фрагмент параболы, и пересекает график синуса в трёх точках, являющимися корнями многочлена.
График ряда Маклорена, начиная с левого края, почти совпадает с графиком синуса, и расхождение с ним начинается заметно на глаз только в правой трети диаграммы.
Графики ошибок аппроксимации выглядят так:
На них видно, что ошибка приближения полиномом Чебышёва в разы больше таковой у ряда Маклорена.
Теперь давайте посмотрим, как ошибки аппроксимации зависят от количества членов аппроксимирующей функции.
Графики ошибок аппроксимации рядами Маклорена разной длины выглядят так:
Графики ошибок аппроксимации полиномами Чебышёва имеют следующий вид:
Графики ошибок выглядят по разному, но в обоих случаях величина ошибки падает с увеличением количества членов ряда.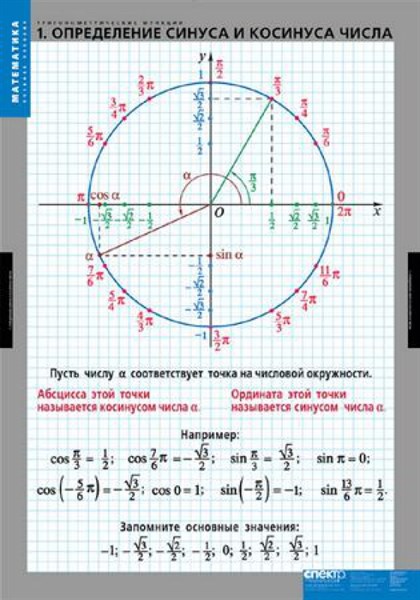 При этом точность полинома Чебышёва уже на порядки хуже таковой у рядов Маклорена.
При этом точность полинома Чебышёва уже на порядки хуже таковой у рядов Маклорена.
На следующей диаграмме показана сравнительная точность аппроксимации обоими методами в зависимости от количества членов ряда (полинома). Точность выражена в «дробных битах», численно равных минус логарифму ошибки по основанию 2:
Вычисления производились с использованием 80-битных числе с плавающей запятой (тип long double). Результаты аппроксимации сравнивались со значением синуса, полученными стандартной функцией sinl() из библиотеки С компилятора gcc.
Приближение при помощи рядов Маклорена (зелёная линия) даёт большую точность по сравнению с полиномами Чебышёва (синяя линия). Точность не растёт выше какого-то предела, это связано с ошибками округления при вычислениях.
Однако для аппроксимации полиномами Чебышёва полный период (от 0 до можно разбить не на 4, как это делалось до сих пор, а, например, на 512 равных интервалов. На диаграмме этот случай представлен серой линией. Точность в 53.94 бита уже при 6 членах (полином 5-й степени) превышает таковую у ряда Маклорена в 51.62 бита при 10 членах ряда.
Точность в 53.94 бита уже при 6 членах (полином 5-й степени) превышает таковую у ряда Маклорена в 51.62 бита при 10 членах ряда.
Вместо вывода. Пока что не существует идеального способа вычисления синуса, иначе не было такого их разнообразия. Подходящий способ выбирается как компромисс, исходя из заданных условий.
тригонометрия — Синусы и косинусы суммы и разности тупых углов
Я предполагаю, что «чисто евклидова геометрия» исключает использование комплексных чисел, определения синуса и косинуса рядами Тейлора, методы линейной алгебры, которые позволяют построить несколько Декартовы системы координат на одной плоскости и построение матриц вращения для преобразования координат и т.д. Я даже предполагаю, что вы не хотите видеть явную декартову систему координат, которая исключает обычные определения тригонометрических функций углов вне интервала $[0,\frac\pi2] в виде единичного круга.$
Проблема в том, что формулы, которые обычно определяются через прямоугольный треугольник, такие как $\sin(\alpha) = \text{противоположность}/\text{гипотенуза},$, неадекватны даже для определения тригонометрической функции других углов, не говоря уже о выводе для них формул суммы и сложения. Итак, прежде всего вы должны отвлечься от SOHCATOA и решить, что является хорошим определением синуса и косинуса тупого угла.
Итак, прежде всего вы должны отвлечься от SOHCATOA и решить, что является хорошим определением синуса и косинуса тупого угла.
Имея в виду, что тригонометрические функции предназначены для облегчения вычислений для широкого круга геометрических фигур в целом, неудивительно, что мы определим синус и косинус тупых углов так, чтобы такие теоремы, как синус Правило и правило косинусов по-прежнему верны для тупоугольных треугольников, используя те же самые формулы, что и для остроугольных треугольников, что избавляет нас от необходимости тратить много ненужных усилий на частные случаи этих теорем. Это означает, что синус тупого угла равен синусу дополнительного угла этого угла (который является острым), тогда как косинус тупого угла есть отрицательное число, равное по величине косинусу добавочного угла (но, очевидно, противоположное по знаку).
Заметим, что если $\alpha$ тупая, то $\alpha = \theta + \frac\pi2$ для некоторого острого угла $\theta,$, а из предыдущего следует, что
$\sin(\alpha) = \cos(\theta) = \cos(\alpha — \frac\pi2)$ и
$\cos(\alpha) = -\sin(\theta) = -\sin(\alpha — \frac\pi2). $
Вот еще вопрос: как быть с формулами разности, когда разность отрицательна — например , $\sin(\alpha — \beta)$, когда $\beta > \alpha$? Вам даже не нужны тупые углы, чтобы столкнуться с этой проблемой. Но вам нужно знать, что мы решили, чтобы сделать тригонометрические формулы как можно более полезными и свободными от частных случаев, что синус отрицательного угла равен по величине, но противоположен по знаку синусу величины угла, а косинус отрицательного угла есть просто косинус величины угла.
Естественно, из определения прямоугольного треугольника, а также из приведенных выше фактов следует, что как для острых, так и для тупых углов, $\sin(\alpha) = \cos(\frac\pi2 — \alpha) = \cos(\alpha — \frac\pi2)$ и $\cos(\alpha) = \sin(\frac\pi2 — \alpha) = -\sin(\alpha — \frac\pi2).$
Вооружившись предыдущими фактами, вы можете найти $\sin( \альфа — \бета)$ и
$\cos(\alpha — \beta)$ для любых острых и тупых углов $\alpha$ и $\beta,$
просто превратив проблему в проблему, для которой у вас уже есть решение.
Задача 1. Найдите $\sin(\alpha — \beta)$, где $\alpha$ тупое, $\beta$ острое и $\alpha — \beta$ острое.
Пусть $\theta = \alpha — \frac\pi2.$ Тогда $\theta$ острое, $\alpha = \frac\pi2 + \theta,$ и $$\sin(\alpha — \beta) = \sin\left(\frac\pi2 + \theta — \beta\right) = \sin\left(\frac\pi2 — (\beta — \theta)\right) = \cos(\beta — \theta).$$
Если $\beta \geq \theta$, то все три углы $\beta,$ $\theta,$ и
$\beta — \theta$ острые и неотрицательные,
поэтому мы можем полагаться на евклидово доказательство формулы для косинуса
неотрицательная острая разность острых углов, найденная при
Как я могу понять и доказать «формулы суммы и разности» в тригонометрии? Поэтому
\начать{выравнивать}
\cos(\beta — \theta) &= \cos(\beta)\cos(\theta) + \sin(\beta)\sin(\theta) \\
&= \cos(\beta)\cos\left(\alpha — \frac\pi2\right)
+ \sin(\beta)\sin\left(\alpha — \frac\pi2\right) \\
&= \cos(\beta)\cos\left(\frac\pi2 — \alpha\right)
+ \sin(\beta)\left(-\sin\left(\frac\pi2 — \alpha\right)\right) \\
&= \cos(\beta)\sin(\alpha) — \sin(\beta)\cos(\alpha). \end{выравнивание}
С другой стороны, если $\beta < \theta$, то все три угла
$\beta,$ $\theta,$ и $\beta - \theta$ острые и неотрицательные, поэтому имеем
\начать{выравнивать}
\cos(\beta - \theta) &= \cos(\theta - \beta) \\
&= \cos(\theta)\cos(\beta) + \sin(\theta)\sin(\beta) \\
&= \sin(\alpha)\cos(\beta) - \cos(\alpha)\sin(\beta).
\end{выравнивание}
В любом случае мы приходим к такому выводу: $$\sin(\alpha — \beta) = \sin(\alpha)\cos(\beta) — \cos(\alpha)\sin(\beta).$$
Задача 2. Найти $ \sin(\alpha — \beta)$, где $\alpha$ тупой, $\beta$ острый и $\alpha — \beta$ тупой.
Как и в задаче 1, пусть $\theta = \alpha — \frac\pi2.$ Заметив, что решение проблемы 1 никогда не основывалось на предположении, что $\alpha — \beta$ было острым, мы можем выполнить точно такую же процедуру с теми же результатами. Заключение: $$\sin(\alpha — \beta) = \sin(\alpha)\cos(\beta) — \cos(\alpha)\sin(\beta).$$
Задача 3. Найдите $\sin(\alpha — \beta)$, где $\alpha$ тупое, $\beta$ тупое, а $\alpha — \beta$ острое и неотрицательное.
Пусть $\theta = \alpha — \frac\pi2$ и $\phi = \beta — \frac\pi2.$ Тогда $\theta$ и $\phi$ острые, $\alpha = \frac\pi2 + \theta,$ $\beta = \frac\pi2 + \phi,$ и $\alpha — \beta = \frac\pi2 + \theta — \left(\frac\pi2 + \phi\right) = \тета — \фи.$ Тогда из условия задачи следует, что $\theta — \phi$ является острым и неотрицательным. Поэтому $$\sin(\alpha — \beta) = \sin(\theta — \phi)$$ и мы можем положиться на евклидово доказательство формулы синуса неотрицательной острой разности острых углов: \начать{выравнивать} \sin(\theta — \phi) &= \sin(\theta)\cos(\phi) — \cos(\theta)\sin(\phi) \\ &= \sin\left(\alpha — \frac\pi2\right)\cos\left(\beta — \frac\pi2\right) — \cos\left(\alpha — \frac\pi2\right)\sin\left(\beta — \frac\pi2\right)\\ &= -\cos(\alpha)\sin(\beta) — \sin(\alpha)(-\cos(\beta)). \end{выравнивание} Заключение: $$\sin(\alpha — \beta) = \sin(\alpha)\cos(\beta) — \cos(\alpha)\sin(\beta).$$
Задача 4. Найдите $\sin(\alpha + \beta)$, где $\alpha$ острое, $\beta$ острое и $\alpha + \beta$ тупое.
У вас есть доказательство Евклида в разделе Поиск альтернативного доказательства расширения разности углов, но давайте посмотрим, можем ли мы снова полагаться только на доказательства для острых сумм острых углов.
Пусть $\theta = \frac\pi2 — \alpha.$ Тогда $\theta$ острая и неотрицательная, $\alpha = \frac\pi2 — \theta,$ и тот факт, что $\alpha + \beta > \frac\pi2$ (дан как предпосылка постановки задачи) следует, что $\beta > \frac\pi2 — \alpha = \theta,$ откуда следует, что $\beta — \theta$ острая и неотрицательная. Поэтому
$$\sin(\alpha + \beta) = \sin(\pi — (\alpha + \beta)) = \sin\left(\pi — \left(\frac\pi2 — \theta + \beta\right)\right) = \sin\left(\frac\pi2 — (\beta — \theta)\right) = \cos(\beta — \theta).$$
Мы уже нашли, что все три угла $\beta, $$\theta,$ и $\beta — \theta$ острые и неотрицательные, поэтому мы можем полагаться на евклидово доказательство формулы для косинуса неотрицательной острой разности острых углов, и, следовательно,
\начать{выравнивать}
\cos(\beta — \theta) &= \cos(\beta)\cos(\theta) + \sin(\beta)\sin(\theta) \\
&= \cos(\beta)\cos\left(\frac\pi2 — \alpha\right)
+ \sin(\beta)\sin\left(\frac\pi2 — \alpha\right) \\
&= \cos(\beta)\sin(\alpha) + \sin(\beta)\cos(\alpha).
Заключение: $$\sin(\alpha + \beta) = \sin(\alpha)\cos(\beta) + \cos(\alpha)\sin(\beta).$$
гораздо дольше, и это пришлось бы сделать, чтобы доказать все остальные формулы с тупыми углами; мы до сих пор не видели доказательства для $\sin(\alpha + \beta)$, где один из углов тупой, как и сумма, и мы не видели доказанных формул косинуса ни для одного из этих случаев. Но я надеюсь, что общая идея ясна.
Лично я нахожу все эти дела утомительными. Более того, как быть с суммой двух тупых углов? Это рефлекторный угол, который мы еще не рассматривали. (Сумма тупого угла и острого угла в некоторых случаях также является рефлекторным углом.) И теперь, когда мы имеем дело с рефлекторными углами, что произойдет, если мы добавим два из них?
Подход, решающий все подобные проблемы, но при этом использующий евклидову геометрию в качестве основы для доказательств, состоит в следующем.
Во-первых, используйте евклидову геометрию для разработки декартовой системы координат. В качестве бонуса, построив декартовы координаты таким образом, мы можем построить любую альтернативную декартову систему координат, которую захотим, в той же плоскости.
Используйте декартовы координаты и единичный круг для определения синуса и косинуса угла любой величины, положительной или отрицательной.
Используйте евклидову геометрию (в основном, подобные прямоугольные треугольники), чтобы составить уравнения преобразования координат между системой координат $S$ и системой координат $S’$ с тем же началом, но повернутым на угол $\theta$ от системы $S. $
Используйте этот механизм, чтобы установить формулы для координат точки $P’$
полученное вращением точки $P$ (с заданными координатами)
через угол $\theta$ вокруг начала координат.
Затем, имея в виду, что когда $\theta < 0,$ "угол $\theta$ против часовой стрелки" означает
"угол $\lvert\theta\rvert$ по часовой стрелке",
возьмем точку $(\cos\alpha,\sin\alpha)$ (лежащую на расстоянии $1$ от начала координат вдоль луча под углом $\alpha$ против часовой стрелки от положительной оси $x$),
повернуть его на угол $\beta$ против часовой стрелки,
приходя в точку на расстоянии $1$ от начала координат по лучу под углом
$\alpha + \beta$ от положительной оси $x$,
и прочтите координаты этой точки, чтобы получить формулы для
$\cos(\alpha + \beta)$ и $\sin(\alpha + \beta).
Этот подход требует развития большого количества механики, которую мы обычно не изучаем в так называемой «евклидовой геометрии», когда изучаем этот предмет в возрасте около четырнадцати лет (по крайней мере, в типичной математической последовательности в США). но это чрезвычайно полезный набор механик для многих целей, и когда он у вас есть, вы можете решить всех задач на сумму и разность углов для всех знаков и величин углов $\alpha$ и $\ beta$ все одним махом. Я думаю, что это стоит инвестиций.
python — Знаете разницу между двумя углами только с их синусом и косинусом?
Задавать вопрос
спросил
Изменено 4 года, 6 месяцев назад
Просмотрено 120 раз
Привет, недавно я писал программу с кучей точек, которую игрок должен был избегать. Точки изменили направление, но не могут слишком сильно повернуться за заданный период времени.
У меня был способ сделать это, но он был неэффективен, так как мне приходилось вычислять арксинус, зная косинус и синусоидальный угол, а затем синус и косинус этого угла. Я думал просто вернуть косинус и синусоидальный угол, но есть одна проблема. Как только я получил косинус и синус, мне также нужно знать, не слишком ли они отличаются от моего текущего состояния.
С углом это было бы легко, так как я бы тоже увидел разницу, вот пример программы (в коде, который у меня сейчас есть, используется угол, и он не очень полезен). Я пытался построить график синуса и косинуса и пытался наблюдать какие-либо закономерности, но ничего очевидного не обнаружилось.
импорт математики
защита sendTargRot():
# На самом деле я использую довольно длинный метод, чтобы найти его текущее вращение, но random.random() является справедливой заменой, поэтому в моей реальной работе не будет вычисления угла
притворный угол = math. pi*random.random()-math.pi
притворятьсяCosedX = math.cos(притворныйугол)
притворятьсяSinedX = math.sin(притворныйугол)
деф changeDotAngle():
targRot = отправитьTargRot
#убедитесь, что targRot не слишком сильно отличается от текущей ротации
#делай что-нибудь с углом, меняй вращение точки
Если вы хотите просто дать мне алгоритм без кода, это так же приемлемо!
РЕДАКТИРОВАТЬ: я не могу изменить sendTargRot, чтобы он давал правильное вращение, потому что это потребовало бы от меня знания текущего угла, и на самом деле это просто перемещение проблемы.
- Python
- Python-3.x
- Math
- Python-3.6
6
Чтобы получить угол между двумя векторами, вы можете использовать atan2 функция
угол = Math.atan2(a.x * b.y - a.y * b.x, a.x * b.x + a.y * b.y)
, если у вас уже есть косинусы и синусы (то же, что и координаты на единичной окружности):
angle = Math.