
Однородные СЛАУ. Фундаментальная система решений
Задание. Найти общее решение и ФСР однородной системы $\left\{\begin{array}{l} x_{1}+x_{2}-3 x_{4}-x_{5}=0 \\ x_{1}-x_{2}+2 x_{3}-x_{4}=0 \\ 4 x_{1}-2 x_{2}+6 x_{3}+3 x_{4}-4 x_{5}=0 \\ 2 x_{1}+4 x_{2}-2 x_{3}+4 x_{4}-7 x_{5}=0 \end{array}\right.$
Решение. Приведем систему к ступенчатому виду с помощью метода Гаусса. Для этого записываем матрицу системы (в данном случае, так как система однородная, то ее правые части равны нулю, в этом случае столбец свободных коэффициентов можно не выписывать, так как при любых элементарных преобразованиях в правых частях будут получаться нули):
$$A=\left(\begin{array}{rrrrr} 1 & 1 & 0 & -3 & -1 \\ 1 & -2 & 2 & -1 & 0 \\ 4 & -2 & 6 & 3 & -4 \\ 2 & 4 & -2 & 4 & -7 \end{array}\right)$$с помощью элементарных преобразований приводим данную матрицу к ступенчатому виду.
Обнуляем элементы второго столбца, стоящие под главной диагональю, для этого от третьей строки отнимаем три вторых, к четвертой прибавляем вторую:
$$A \sim\left(\begin{array}{rrrrr} 1 & 1 & 0 & -3 & -1 \\ 0 & -2 & 2 & 2 & 1 \\ 0 & 0 & 0 & 9 & -3 \\ 0 & 0 & 0 & 12 & -4 \end{array}\right)$$От четвертой строки отнимем $\frac{4}{3}$ третьей и третью строку умножим на $\frac{1}{3}$ :
$$A \sim\left(\begin{array}{rrrrr} 1 & 1 & 0 & -3 & -1 \\ 0 & -2 & 2 & 2 & 1 \\ 0 & 0 & 0 & 3 & -1 \\ 0 & 0 & 0 & 0 & 0 \end{array}\right)$$ Нулевые строки можно далее не рассматривать, тогда получаем, что $$A \sim\left(\begin{array}{rrrrr} 1 & 1 & 0 & -3 & -1 \\ 0 & -2 & 2 & 2 & 1 \\ 0 & 0 & 0 & 3 & -1 \end{array}\right)$$Далее делаем нули над главной диагональю, для этого от первой строки отнимаем третью, а ко второй строке прибавляем третью:
$$A \sim\left(\begin{array}{rrrrr} 1 & 1 & 0 & -6 & 0 \\ 0 & -2 & 2 & 5 & 0 \\ 0 & 0 & 0 & 3 & -1 \end{array}\right)$$то есть получаем систему, соответствующую данной матрице:
$$\left\{\begin{array}{l} x_{1}+x_{2}-6 x_{4}=0 \\ -2 x_{2}+2 x_{3}+5 x_{4}=0 \\ 3 x_{4}-x_{5}=0 \end{array}\right. $$
$$Или, выразив одни переменные через другие, будем иметь:
Здесь $x_{2}, x_{4}$ — независимые (или свободные) переменные (это те переменные, через которые мы выражаем остальные переменные), $x_{1}, x_{3}, x_{5}$ — зависимые (связанные) переменные (то есть те, которые выражаются через свободные). Количество свободных переменных равно разности общего количества переменных $n$ (в рассматриваемом примере $n=5$ , так как система зависит от пяти переменных) и ранга матрицы $r$ (в этом случае получили, что $r=3$ — количество ненулевых строк после приведения матрицы к ступенчатому виду): $n-r=5-3=2$
Так как ранг матрицы $r=3$ , а количество неизвестных системы $n=5$ , то тогда количество решений в ФСР $n-r=5-3=2$ (для проверки, это число должно равняться количеству свободных переменных).
Для нахождения ФСР составляем таблицу, количество столбцов которой соответствует количеству неизвестных (то есть
для рассматриваемого примера равно 5), а количество строк равно количеству решений ФСР (то есть имеем две строки).
Тогда придавая в первом случае, например, независимым переменным значения $x_{2}=1$ , $x_{4}=0$ получаем, что $\left\{\begin{array}{l} x_{1}=-1+6 \cdot 0=-1 \\ x_{3}=1-\frac{5}{2} \cdot 0=1 \\ x_{5}=3 \cdot 0=0 \end{array}\right.$ . Полученные значения записываем в первую строку таблицы. Аналогично, беря $x_{2}=0$ , $x_{4}=2$, будем иметь, что {x_{1}=12, x_{3}=-5, x_{5}=6} , что и определяет второе решение ФСР. В итоге получаем следующую таблицу:
Эти две строчки и есть фундаментальным решением заданной однородной СЛАУ. Частное решение системы:
Частное решение системы:
Общее решение является линейной комбинацией частных решений:
$$X=C_{1} X_{1}+C_{2} X_{2}=C_{1}\left(\begin{array}{r} -1 \\ 1 \\ 1 \\ 0 \\ 0 \end{array}\right)+C_{2}\left(\begin{array}{r} 12 \\ 0 \\ -5 \\ 2 \\ 6 \end{array}\right)$$где коэффициенты $C_{1}, C_{2}$ не равны нулю одновременно. Или запишем общее решение в таком виде:
$\left\{\begin{array}{l} x_{1}=-C_{1}+12 C_{2} \\ x_{2}=C_{1} \\ x_{3}=C_{1}-5 C_{2} \\ x_{4}=2 C_{2} \\ x_{5}=6 C_{2} \end{array}\right.$ $C_{1}, C_{2} \neq 0$
Придавая константам $C_{1}, C_{2}$ определенные значения и подставляя их в общее решение, можно будет находить частные решения однородной СЛАУ.
Фундаментальное решение системы линейных уравнений. Взгляд со стороны / Хабр
Добрый день!
В данной статье я попробую взглянуть по новому на алгоритм поиска общего решения системы линейных уравнений.
Задача, которой мы займемся звучит так.
Найти общее решение следующей системы уравнений
Такую задачу решают, приведя исходную систему к треугольному виду по методике Гаусса. Потом выбрав свободные переменные вычисляют общее решение.
Я хочу показать, как можно решать подобные системы другим способом. Насколько она известна и применяется где либо, я узнать не смог. Во всех публичных/популярных материалах, используется метод Гаусса.
Сразу скажу что решение конечно же не оптимально (по быстродействию), так как при вычислении векторного произведения, надо вычислять определитель матрицы, а это так или иначе вычисление треугольной матрицы.
Но решение красиво и наглядно, кроме этого легко видеть критерий при котором система не имеет решений.
В чем же суть методики?
Решая эту систему как произведение двух векторов, мы получим
А следовательно, корни системы равны
Для тех кто не верит, это легко проверяется подстановкой
Используем этот прием и рассмотрим, как же решаются такие системы с помощью векторных произведений.
Итак, у нас есть исходная система
Перенесем свободные члены в левую часть
У нас получилось 6 столбцов.
На этом этапе не будем вводить новых сущностей и не используем в своей работе понятия ранга матрицы. (Прошу отнестись снисходительно)
На этом же шаге, мы можем определить, какие же из переменных будут свободными. Возьмем две переменных, которые будут правее всех, и назначим их свободными.
Note: Для других уравнений не всегда получается, что надо брать именно последние правые коэффициенты
А теперь за три шага определяем фундаментальное решение исходной системы
Шаг 1. Здесь последняя колонка это свободные члены системы
Шаг 2. Здесь последняя колонка это коэффициенты при переменной
Шаг 3. Здесь последняя колонка это коэффициенты при переменной
Нет необходимости подробно рассказывать откуда мы берем данные.
Интереснее то, что мы с этими «векторами» делать будем.
Разделим их на -81
получаем следующие три вектора
выстроим их в вертикаль и таким образом фундаментальное решение принимает вид
Великолепно! Не правда ли…
Для критерия разрешимости заданной системы уравнений в большинстве случаев используется правило Кронекера-Копелли, здесь же просто анализируется результат векторного произведения.
Если результирующий вектор имеет вид
где , а среди всех оставшихся есть хотя бы один не нулевой, то такая система решений не имеет
Если результирующий вектор имеет все нулевые коэффициенты, то это говорит о том, что или как минимум одно из уравнений есть линейное представление другого, и/или одна из переменных пропорциональна другой.
Эта статья первая, и хотелось бы услышать замечания, критику, пожелания в свой адрес.
Алгоритм и калькулятор создан еще в январе 2019 года и только сегодня я решил опубликовать информацию на Хабре.
Если примете в свой коллектив/общество, то следующая тема будет
— как находить общее решение системы диофантовых уравнений.
📝Фундаментальная система решений
Чтобы понять, что такое фундаментальная система решений вы можете посмотреть видео-урок для этого же примера кликнув здесь. Теперь перейдем собственно к описанию всей необходимой работы. Это поможет вам более детально разобраться в сути данного вопроса.
Как найти фундаментальную систему решений линейного уравнения?
Возьмём для примера такую систему линейных уравнений:
Найдём решение этой линейной системы уравнений методом Гаусса. Для начала нам надо выписать матрицу коэффициентов системы.
Преобразуем эту матрицу к треугольной. Первую строку переписываем без изменений. И все элементы, что стоят под $a_{11}$, надо сделать нулями.
Первую и вторую строку переписываем без изменений. И все элементы, что стоят под $a_{22}$, надо сделать нулями. Что бы сделать ноль в место элемента $a_{32}$, надо от третьей строки вычесть вторую умноженную на 2 и разность записать в третьей строке. Что бы сделать ноль в место элемента $a_{42}$, надо от четвёртой строки вычесть вторую умноженную на 2 и разность записать в четвёртой строке. Что бы сделать ноль в место элемента $a_{52}$, надо от пятой строки вычесть вторую умноженную на 3 и разность записать в пятой строке.

Видим, что последние три строки – одинаковые, поэтому если от четвёртой и пятой вычесть третью, то они станут нулевыми.
По этой матрице записываем новую систему уравнений.
Видим, что линейно независимых уравнений у нас, только три, а неизвестных пять, поэтому фундаментальная система решений будет состоять из двух векторов. Значит, нам надо перенести две последние неизвестные вправо.
Теперь, начинаем выражать те неизвестные, что стоят в левой части через те, что стоят в правой части. Начинаем с последнего уравнения, сначала выразим $x_3$, потом полученный результат подставим во второе уравнение и выразим $x_2$, а потом в первое уравнение и тут выразим $x_1$. Таким образом мы все неизвестные, что стоят в левой части, выразили через неизвестные, что стоят в правой части.
После чего вы вместо $x_4$ и $x_5$, можем подставлять любые числа и находить $x_1$, $x_2$ и $x_3$. Каждая такая пятёрка чисел будет корнями нашей изначальной системы уравнений.
 Что бы найти векторы, что входят в ФСР нам надо вместо $x_4$ подставить 1, а вместо $x_5$ подставить 0, найти $x_1$, $x_2$ и $x_3$, а потом наоборот $x_4=0$ и $x_5=1$.
Что бы найти векторы, что входят в ФСР нам надо вместо $x_4$ подставить 1, а вместо $x_5$ подставить 0, найти $x_1$, $x_2$ и $x_3$, а потом наоборот $x_4=0$ и $x_5=1$.Какие именно векторы создают фундаментальную систему решений данной системы уравнений?
Для лучшего понимания хода роботы можете посмотреть видео-урок по данном задании.
Материалы по теме:
Поделиться с друзьями:
Загрузка…Фундаментальная система решений СЛАУ
Системой линейных уравнений называется система вида: $\begin{cases} a_{11} \cdot x_1 +…+ a_{1n} \cdot x_n = b_1 \\ … \\ a_{m1} \cdot x_1 + a_{mn} \cdot x_n = b_m \end{cases}$
Замечание 1
Здесь каждая буква относится к своей группе обозначений, $x_1…x_n$ — это неизвестные числа или переменные, подлежащие поиску, $a_11…a_{mn}$ — множители, содержащиеся при неизвестных, $b_1…b_m$ — свободные члены таблицы из чисел, получаемой на основе приведённой СЛАУ.
В компактной форме СЛАУ принято записывать в виде формулы вида $A \cdot X = B$. В этой формуле под большой буквой $A$ подразумевается матрица множителей при неизвестных системы, а буквами $X$ и $B$ обозначены вектор-столбец неизвестных системы и свободных членов.
Матрица $A$ называется основной матрицей системы, вот как она будет выглядеть:
$A = \begin{pmatrix} a_{11} & … & a_{1n} \\ \vdots & … & \vdots \\ a_{m1} & … & a_{mn} \end{pmatrix}$, $b=\begin{pmatrix} b_1 \\ \vdots \\ b_m \end{pmatrix}$
Если через длинную черту после матрицы множителей при неизвестных записан столбец свободных членов, то матрицу называют расширенной матрицей системы.
Необходимая терминология
Определение 1
Решением системы называют такие $n$ значений неизвестных $x_1=c_1, x_2=c_2…x_n-c_n$, что при их использовании все её уравнения становятся верными соблюдающимися равенствами. Найденное решение системы можно записать в виде таблицы неизвестных одним столбцом:
$C= \begin{pmatrix} c_1 \\ c_2 \\ \vdots \\ c_n \end{pmatrix}$.
В зависимости от количеств групп переменных, подходящих для соблюдения всей системы, различают совместные и несовместные СЛАУ. Объединённая в систему группа равенств называется совместной, если она имеет хотя бы одно решение и несовместной, если она не имеет решений.
Среди первого типа существуют определённые СЛАУ, имеющие только одно решение и неопределённые, под такие подпадают все, которые можно решить с получением больше одного ответа.
Однородные и неоднородные системы линейных уравнений
Система линейных уравнений называется однородной, если все её свободные члены равны нулю. Если в системе хотя бы один из свободных членов ненулевой, то она называется неоднородной, другие же СЛАУ с нулевым $B$ наоборот однородны.
Однородные системы совместны, так как $x_1=x_2=…x_n=0$ будет решением для систем, имеющих особенность в виде нулевого столбца $B$. Иначе такая группа ответов называется нулевым или тривиальным способом решения.
Нетривиальными же называются ответы на СЛАУ, детерминант матрицы которой не $0$. В группе ответов таких систем хотя бы одно из неизвестных подходит под $x_i$ ≠ $0$. Для поиска детерминанта можно воспользоваться $LU$ разложениями, гаусовым методом или его модификацией в виде способа Жордана-Гаусса.
Общее, частное и фундаментальное решения
Определение 2
Частным решением системы называется индивидуальное записанное в одну строчку, тогда как общее $X_o$ записывается через свободные переменные в одну строчку, оно представляет собой некое множество чисел, подходящих под данные условия. Общее $X_o$ включает в себя все индивидуальные.
Фундаментальной же системой решений (ФСР) называется совокупность $(n-r)$ векторов, являющихся линейно независимыми векторами системы. Здесь $r$ — это ранг исследуемой матрицы, согласно теореме Капелли, он равен количеству её основных неизвестных. Найти его можно путём разрешённых преобразований над изучаемым объектом, в частности, можно использовать метод Гаусса или другие.
Фундаментальная система решений частенько представлена как сумма всех возможных решений:
$X=C_1X_1 + C_2X_2+…C_{n-r}X_{n-r}$.
Здесь $С_1, C_2,…C_{n-r}$ — некоторые постоянные.
Пример 1
Приведена пример, в котором все свободные члены ненулевые:
$\begin{cases} x_1 – x_2 + x_3-x_4=4 \\ x_1+x_2+2x_3+3x_4=8 \\ 2x_1+4x_2+5x_3+10x_4=20 \\ 2x_1-4x_2+x_3-6x_4=4\\ \end{cases}$.
Ранг всех матриц соответсвует двойке, рассчитаем базисный минор:
$M=\begin{array}{|cc|} 1 & -1 \\ 1 &1 \\ \end{array}=2$
Избавимся от двух нижних равенств из примера и получим:
$\begin{cases} x_1 – x_2=4-c_3+c_4 \\ x_1+x_2=8-2c_3-3c_4 \\ \end{cases}$
Общим решением системы будет строчка $(6-\frac{3}{2}c_3-c_4; 2-\frac{1}{2}c_3-2c_4;c_3; c_4)$.
Теперь посмотрим, что буде в случае с нулевым столбцом за чертой:
$\begin{cases} x_1 – x_2 + x_3-x_4=0 \\ x_1+x_2+2x_3+3x_4=0 \\ 2x_1+4x_2+5x_3+10x_4=0 \\ 2x_1-4x_2+x_3-6x_4=0 \end{cases}$.
Ранг также соответствует двойке, а её решениями будут
$c_1=-\frac{3}{2} c_3-c_4; c_2=-\frac{1}{2}c_3-2c_4$. Константы же $c_3$ и $c_4$ выберем любые, например, возьмём их равными $c_3=0;c_4=1$.
Итак, используя приведённые выше значения $c_3=0;c_4=1$:
$X_1=(-\frac32;-\frac12;1;0)$;
$X_2=(-1;-2;0;1)$.
Фундаментальное решение системы можно записать так:
$X=C_1 (-\frac{3}{2};-\frac{1}{2};1;0)+C_2(-1;-2;0;1)$.
ФРС. Фундаментальное решение системы уравнений
| Исходная система уравнений |
| Фундаментальная система решений (ФСР) данной системы уравнений |
| База системы/знаменатель |
Попробуем решить систему уравнений, типа
Решение подобных систем неразрывно связывают с формулой приведения матрицы к треугольному виду. Это наглядно, красиво и никогда не дает сбоев. Есть только одно но, нужно делать очень много ручной работы и использовать понятия ранга матрицы
Это наглядно, красиво и никогда не дает сбоев. Есть только одно но, нужно делать очень много ручной работы и использовать понятия ранга матрицы
Нет никаких сомнений подвергать выверенную веками технологию, но есть не менее красивое решение используя векторное произведение. Информации по ним на январь 2019 года в интернете нет, поэтому скромно назовемся первооткрывателем.
Это решение конечно же не оптимально (по быстродействию), так как при вычислении векторного произведения, надо вычислять определитель матрицы, а это так или иначе вычисление треугольной матрицы.
Но решение красиво и наглядно, кроме этого легко видеть критерий при котором система не имеет решений.
В чем же суть методики?
Решая эту систему как произведение двух векторов, мы получим
А следоватетельно, корни системы равны
Для тех кто не верит, это легко проверяется подстановкой
Такой же нехитрый прием используется и при системах где количество переменных может быть и пять и десять.
Рассмотрим, как же решаются такие системы с помощью векторных произведений.
Итак, у нас есть исходная система
Приведем её вот в такой вид
У нас получилось 6 столбцов.
На этом этапе не будем вводить новых сущностей и не используем в своей работе понятия ранга матрицы. Мы просто видим что уравнений 3, а переменных 5-ть. Следовательно общее решение будет использовать 5-3=2 независимых переменных.
На этом же шаге, мы можем определить, какие же из переменных будут свободными. Так как фантазии ноль, то те из переменных, которые будут правее всех, те и станут свободными.
То есть свободными у нас будут две переменных
А теперь за три шага определяем фундаментальное решение исходной системы
Шаг1.
Шаг 2.
Шаг 3.
Нет необходимости подробно рассказывать откуда мы берем данные.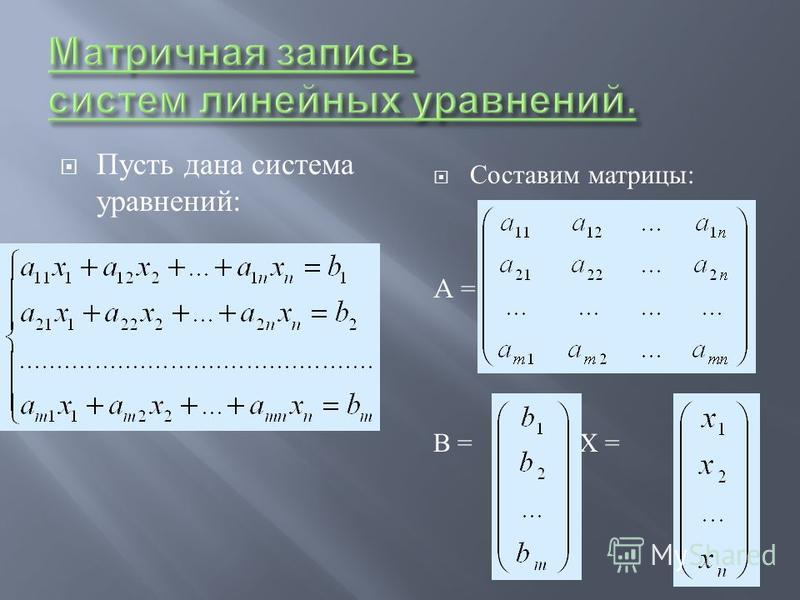 Это очевидно
Это очевидно
Интереснее то, что мы с этими «векторами» делать будем.
Разделим их на -81
получаем следующие три вектора
Таким образом фундаментальное решение принимает вид
Великолепно! Не правда ли….
Хочется еще что то решить…. Еще один пример
Это интересное уравнение, так вектора в любом сочетании будут давать ноль.
Это говорит нам о том, что одно из уравнений «лишнее». Согласимся с этим и уберем его. Например последнее.
Тогда нам надо выбрать две свободных переменных, пусть это будут переменные с индексами 2 и 4.
Тогда вектора находятся как
Разделим на -3 и наше общее решение будет иметь вид
Не каждому сразу становиться ясно откуда у нас появляются нули и единицы в нашем стройном вектором ряде. Это связано с тем, что мы свободные переменные выбрали как нашей душе угодно, а не самые крайние правые.
Это связано с тем, что мы свободные переменные выбрали как нашей душе угодно, а не самые крайние правые.
Если бы мы взяли переменные с индексами 3 и 4 как свободные то решение бы мы переписали так как нам бы выдала машина.
В начале статьи мы упомянули о критерии неразрешимости той или иной системы уравнений. В классической версии для этого исползуется правило Кронекера-Копелли, здесь же просто анализируется результат векторного произведения.
Если результирующий вектор имеет вид
где , а среди всех оставшихся есть хотя бы один не нулевой, то такая система решений не имеет
Примеры, неразрешимых систем уравнений
Если результирующий вектор имеет все нулевые коэффициенты ( мы такой пример рассмотрели выше), то это говорит о том, что или как минимум одно из уравнений есть линейное представление другого, и/или одна из переменных пропорциональна другой.
Калькулятор, представленный здесь, дает Вам возможность самому проанализировать исходную систему, за Вас он лишь сделает точные расчеты, по тем данным, что Вы ему введете.
Вот один из примеров
| Исходная система уравнений |
| Фундаментальная система решений (ФСР) данной системы уравнений |
| База системы/знаменатель |
- Функция ошибок >>
Страница не найдена — ПриМат
© 2012-2016: Нохум-Даниэль Блиндер (11), Анастасия Лозинская (10), Валентин Малявко (8), Елизавета Савицкая (8), Игорь Любинский (8), Юлия Стерлянко (8), Денис Стехун (8), Александр Базан (7), Анна Чалапчий (7), Константин Берков (7), Олег Шпинарев (7), Кирилл Волков (6), Татьяна Корнилова (6), Влад Радзивил (6), Максим Швандт (6), Людмила Рыбальченко (6), Елизавета Снежинская (5), Вадим Покровский (5), Даниил Радковский (5), Влад Недомовный (5), Александр Онищенко (5), Андрей Метасов (5), Денис Базанов (5), Александр Ковальский (5), Александр Земсков (5), Марина Чайковская (5), Екатерина Шибаева (5), Мария Корень (5), Анна Семененко (5), Мария Илларионова (5), Сергей Черкес (5), Алиса Ворохта (5), Валерия Заверюха (5), Яков Юсипенко (4), Ольга Слободянюк (4), Руслан Авсенин (4), Екатерина Фесенко (4), Дмитрий Заславский (4), Алина Малыхина (4), Андрей Лисовой (4), Полина Сорокина (4), Кирилл Демиденко (4), Дмитрий Стеценко (4), Александр Рапчинский (4), Святослав Волков (4), Иван Мясоедов (4), Владислав Стасюк (4), Алёна Гирняк (4), Николай Царев (4), Валентин Цушко (4), Павел Жуков (4), Роман Бронфен-Бова (4), Артём Романча (4), Анна Шохина (4), Иван Киреев (4), Никита Савко (4), Кондрат Воронов (4), Алина Зозуля (4), Иван Чеповский (4), Артем Рогулин (4), Игорь Чернега (4), Даниил Кубаренко (4), Ольга Денисова (4), Татьяна Осипенко (4), Вячеслав Иванов (3), Валерия Ларикова (3), Евгений Радчин (3), Андрей Бойко (3), Милан Карагяур (3), Александр Димитриев (3), Иван Василевский (3), Руслан Масальский (3), Даниил Кулык (3), Стас Коциевский (3), Елизавета Севастьянова (3), Павел Бакалин (3), Антон Локтев (3), Андрей-Святозар Чернецкий (3), Николь Метри (3), Евелина Алексютенко (3), Константин Грешилов (3), Марина Кривошеева (3), Денис Куленюк (3), Константин Мысов (3), Мария Карьева (3), Константин Григорян (3), Колаев Демьян (3), Станислав Бондаренко (3), Ильдар Сабиров (3), Владимир Дроздин (3), Кирилл Сплошнов (3), Карина Миловская (3), Дмитрий Козачков (3), Мария Жаркая (3), Алёна Янишевская (3), Александра Рябова (3), Дмитрий Байков (3), Павел Загинайло (3), Томас Пасенченко (3), Виктория Крачилова (3), Таисия Ткачева (3), Владислав Бебик (3), Илья Бровко (3), Максим Носов (3), Филип Марченко (3), Катя Романцова (3), Илья Черноморец (3), Евгений Фищук (3), Анна Цивинская (3), Михаил Бутник (3), Станислав Чмиленко (3), Катя Писова (3), Дмитрий Дудник (3), Дарья Кваша (3), Игорь Стеблинский (3), Артем Чернобровкин (3), Виктор Булгаков (3), Дмитрий Мороз (3), Богдан Павлов (3), Игорь Вустянюк (3), Андрей Яроцкий (3), Лаура Казарян (3), Екатерина Мальчик (3), Анатолий Осецимский (3), Иван Дуков (3), Дмитрий Робакидзе (3), Вячеслав Зелинский (3), Данила Савчак (3), Дмитрий Воротов (3), Стефания Амамджян (3), Валерия Сиренко (3), Георгий Мартынюк (3), Виктор Иванов (3), Георгий Луценко (2), Владислав Гринькив (2), Александр Дяченко (2), Анна Неделева (2), Никита Строгуш (2), Настя Панько (2), Кирилл Веремьев (2), Даниил Мозгунов (2), Андрей Зиновьев (2), Андрей Данилов (2), Даниил Крутоголов (2), Наталия Писаревская (2), Дэвид Ли (2), Александр Коломеец (2), Александра Филистович (2), Евгений Рудницкий (2), Олег Сторожев (2), Евгения Максимова (2), Алексей Пожиленков (2), Юрий Молоканов (2), Даниил Кадочников (2), Александр Колаев (2), Александр Гутовский (2), Павел Мацалышенко (2), Таня Спичак (2), Радомир Сиденко (2), Владислав Шиманский (2), Илья Балицкий (2), Алина Гончарова (2), Владислав Шеванов (2), Андрей Сидоренко (2), Александр Мога (2), Юлия Стоева (2), Александр Розин (2), Надежда Кибакова (2), Майк Евгеньев (2), Евгений Колодин (2), Денис Карташов (2), Александр Довгань (2), Нина Хоробрых (2), Роман Гайдей (2), Антон Джашимов (2), Никита Репнин (2), Инна Литвиненко (2), Яна Юрковская (2), Гасан Мурадов (2), Богдан Подгорный (2), Алексей Никифоров (2), Настя Филипчук (2), Гук Алина (2), Михаил Абабин (2), Дмитрий Калинин (2), Бриткариу Ирина (2), Никита Шпилевский (2), Алексей Белоченко (2), Юлиана Боурош (2), Никита Семерня (2), Владимир Захаренко (2), Дмитрий Лозинский (2), Яна Колчинская (2), Юрий Олейник (2), Кирилл Бондаренко (2), Елена Шихова (2), Татьяна Таран (2), Наталья Федина (2), Настя Кондратюк (2), Никита Гербали (2),
1. Системы линейных однородных уравнений. Фундаментальная система решений.
Система m линейных уравнений с n переменными называется системой линейных однородных уравнений, если все их свободные члены равны нулю. Такая система имеет вид:
(1)
Система линейных однородных уравнений всегда совместна, так как она всегда имеет, по крайней мере, нулевое (или тривиальное) решение (0; 0; …; 0).
Если в системе (1) m = n , а ее определитель отличен от нуля, то такая система имеет только нулевое решение, как это следует из формул Крамера. Ненулевые решения, следовательно, возможны лишь для таких систем линейных однородных уравнений, в которых число уравнений меньше числа переменных, или при их равенстве, когда определитель системы равен нулю.
Иначе: система линейных однородных уравнений имеет ненулевые решения тогда и только тогда, когда ранг ее матрицы коэффициентов при переменных меньше числа переменных, т.е. при rang(A) < n.
Обозначим решение системы (1) х1 = k1, х2 = k2,….,xn = kn в виде строки е1 = (k1,k2,…,kn ).
Решения системы линейных однородных уравнений обладают следующими свойствами:
1. Если строка е1 = (k1,k2,…,kn) — решение системы (1), то и строка е1 = (k1, k2,…, kn )— также решение этой системы.
2. Если строки е1 = (k1,k2,…,kn ) и е2 = (l1,l2,…,ln ) —решения системы (1), то при любых с1 и с2 их линейная комбинация
c1 e1 +c2 e2 = (c1 k1 +c2 l1 ,c1 k2 + c2 l2 ,…., c1 kn +c2 ln )
также решение данной системы.
Убедиться в справедливости указанных свойств решений системы линейных однородных уравнений можно непосредственной подстановкой их в уравнения системы.
Из сформулированных свойств следует, что всякая линейная комбинация решений системы линейных однородных уравнений также является решением этой системы. Поэтому представляет интерес найти такие линейно независимые решения системы (1), через которые линейно выражались бы все остальные ее решения.
Решения е1, е2, …, еk называются линейно независимыми, если их линейная комбинация 1е1 + 2е2 +…+ кек равна нулю, только при условии что 1 = 2 =….= к = 0.
Определение 2.9. Система линейно независимых решений е1, е2, …, еk называется фундаментальной, если каждое решение системы (1) является линейной комбинацией решений е1, е2, …, еk .
Теорема. Если ранг r матрицы коэффициентов при переменных системы линейных однородных уравнений (1) меньше числа переменных n, то всякая фундаментальная система решений системы (1) состоит из n – r решений.
Общим решением системы (1) линейных однородных уравнений называется множество всех ее решений, записанных в виде: с1е1 + с2е2 + … + с k е k , где е1, е2, … , еk — любая фундаментальная система решений, с1, с2, … , сk — произвольные числа и k = n – г .
Общее решение неоднородной системы m линейных уравнений с n переменными равно сумме общего решения соответствующей ей системы однородных линейных уравнений и произвольного частного решения этой системы.
Пример 1. Решить однородную систему линейных алгебраических уравнений
Решение: Определитель системы , поэтому система имеет единственное нулевое решение:x = y = z = 0.
Пример 2. Найти общее решение системы линейных алгебраических уравнений и записать фундаментальную систему решений
Решение: Определитель системы , поэтому система имеет бесконечное множество решений. Так как определитель из коэффициентов при неизвестныхx1 и х2 не равен нулю , то этот минор можно принять за базисный. Посколькуrang A = 2, n = 3, возьмем первые два уравнения системы и найдем ее общее решение.
В качестве базисных неизвестных возьмем x1 и х2 и переместим члены с х3 в правые части уравнений:
Решая эту систему по формулам Крамера и задав свободной переменной х3 значение х3 = c1 (с1 – произвольное число), получаем
;
Отсюда находим, что
Итак — общее решение.
Полагая с1 = 1, получим частное решение
Или в матричном виде . Таким образом, фундаментальная система решений состоит из единственного вектора.
Ответ: общее решение ,
где c1 — произвольное число. — фундаментальная система решений.
Пример 3. Решить однородную систему линейных алгебраических уравнений
Решение: Определитель системы , поэтому система имеет бесконечное множество решений. Поскольку все строки матрицы пропорциональны, тоrang A = 1. Возьмем любое (например, второе) уравнение системы и найдем ее решение. Так как rang A = 1, n = 3, то базисная переменная одна, остальные две свободные. Фундаментальная система решений состоит из k = n – r = 3 = 1 = 2 решений.
полагая х2 = с1, х3 = с2 получаем решение системы , гдес1 и с2 произвольные числа.
Ответ: общее решение , гдес1 и с2 произвольные числа.
Фундаментальное решение системы уравнений
| Исходная система уравнений |
| Фундаментальная система решений (FSD) этой системы уравнений |
| Базовая система / знаменатель |
| Исходная система уравнений |
| Фундаментальная система решений (ФСР) этой системы уравнений |
| Системная база / знаменатель |
Система линейных уравнений — линейная алгебра с приложениями
Практические задачи во многих областях науки, таких как биология, бизнес, химия, информатика, экономика, электроника, инженерия, физика и социальные науки, часто можно свести к решению системы линейных уравнений.Линейная алгебра возникла из попыток найти систематические методы решения этих систем, поэтому естественно начать эту книгу с изучения линейных уравнений.
Если, и — действительные числа, график уравнения вида
— прямая линия (если и не равны нулю), поэтому такое уравнение называется линейным уравнением в переменных и. Однако часто удобно записывать переменные как, особенно когда задействовано более двух переменных.Уравнение вида
называется линейным уравнением в переменных. Здесь обозначают действительные числа (называемые коэффициентами соответственно), а также число (называемое постоянным членом уравнения). Конечный набор линейных уравнений с переменными называется системой линейных уравнений с этими переменными. Следовательно,
— линейное уравнение; коэффициенты при, и равны, и, а постоянный член равен.Обратите внимание, что каждая переменная в линейном уравнении встречается только в первой степени.
Для линейного уравнения последовательность чисел называется решением уравнения, если
, то есть, если уравнение удовлетворяется при выполнении замен. Последовательность чисел называется решением системы уравнений, если она является решением каждого уравнения в системе.
Система может вообще не иметь решения, или она может иметь уникальное решение, или она может иметь бесконечное семейство решений.Например, система не имеет решения, потому что сумма двух чисел не может быть одновременно 2 и 3. Система, не имеющая решения, называется несовместимой ; система с хотя бы одним решением называется согласованным .
Покажите, что для произвольных значений и
— это решение системы
Просто подставьте эти значения,, и в каждое уравнение.
Поскольку оба уравнения удовлетворяются, это решение для любого выбора и.
Величины и в этом примере называются параметрами , а набор решений, описанный таким образом, считается заданным в параметрической форме и называется общим решением системы. Оказывается, что решения каждой системы уравнений (если есть , — это решений) могут быть даны в параметрической форме (то есть, переменные задаются в терминах новых независимых переменных и т. Д. .).
Когда задействованы только две переменные, решения систем линейных уравнений могут быть описаны геометрически, потому что график линейного уравнения представляет собой прямую линию, если оба они не равны нулю. Более того, точка с координатами и лежит на прямой тогда и только тогда, когда — то есть когда, является решением уравнения. Следовательно, решения системы линейных уравнений соответствуют точкам, которые лежат на всех рассматриваемых линиях.
В частности, если система состоит только из одного уравнения, должно быть бесконечно много решений, потому что на прямой бесконечно много точек. Если система имеет два уравнения, есть три возможности для соответствующих прямых:
- Линии пересекаются в одной точке. Тогда система имеет уникальное решение , соответствующее этой точке.
- Линии параллельны (и различны) и поэтому не пересекаются. Тогда в системе нет решения .
- Строки идентичны. Тогда в системе будет бесконечно много решений — по одному для каждой точки на (общей) прямой.
С тремя переменными график уравнения может быть показан как плоскость и, таким образом, снова дает «картину» множества решений. Однако у этого графического метода есть свои ограничения: когда задействовано более трех переменных, физическое изображение графов (называемых гиперплоскостями) невозможно. Необходимо обратиться к более «алгебраическому» методу решения.
Перед описанием метода мы вводим понятие, упрощающее вычисления. Рассмотрим следующую систему
трех уравнений с четырьмя переменными. Массив чисел
, встречающееся в системе, называется расширенной матрицей системы. Каждая строка матрицы состоит из коэффициентов переменных (по порядку) из соответствующего уравнения вместе с постоянным членом. Для наглядности константы разделены вертикальной линией.Расширенная матрица — это просто другой способ описания системы уравнений. Массив коэффициентов при переменных
называется матрицей коэффициентов системы, а
называется постоянной матрицей системы.
Элементарные операции
Алгебраический метод решения систем линейных уравнений описывается следующим образом. Две такие системы называются эквивалентами , если они имеют одинаковый набор решений.Система решается путем написания серии систем, одна за другой, каждая из которых эквивалентна предыдущей системе. Каждая из этих систем имеет тот же набор решений, что и исходная; цель состоит в том, чтобы получить систему, которую легко решить. Каждая система в серии получается из предыдущей системы простой манипуляцией, выбранной так, чтобы она не меняла набор решений.
В качестве иллюстрации мы решаем систему таким образом. На каждом этапе отображается соответствующая расширенная матрица.Исходная система —
Сначала вычтите дважды первое уравнение из второго. В результате получается система
, что эквивалентно оригиналу. На этом этапе мы получаем, умножив второе уравнение на. В результате получается эквивалентная система
.Наконец, мы дважды вычитаем второе уравнение из первого, чтобы получить другую эквивалентную систему.
Теперь эту систему легко решить! И поскольку он эквивалентен исходной системе, он обеспечивает решение этой системы.
Обратите внимание, что на каждом этапе в системе (и, следовательно, в расширенной матрице) выполняется определенная операция для создания эквивалентной системы.
Следующие операции, называемые элементарными операциями , могут в обычном порядке выполняться над системами линейных уравнений для получения эквивалентных систем.
- Поменяйте местами два уравнения.
- Умножьте одно уравнение на ненулевое число.
- Добавьте одно уравнение, кратное одному, к другому уравнению.
Предположим, что последовательность элементарных операций выполняется над системой линейных уравнений. Тогда полученная система имеет тот же набор решений, что и исходная, поэтому две системы эквивалентны.
Элементарные операции, выполняемые над системой уравнений, производят соответствующие манипуляции с строками расширенной матрицы. Таким образом, умножение строки матрицы на число означает умножение каждой записи строки на.Добавление одной строки к другой означает добавление каждой записи этой строки к соответствующей записи другой строки. Аналогично производится вычитание двух строк. Обратите внимание, что мы считаем две строки равными, если соответствующие записи совпадают.
В ручных вычислениях (и в компьютерных программах) мы манипулируем строками расширенной матрицы, а не уравнениями. По этой причине мы переформулируем эти элементарные операции для матриц.
Следующие операции называются элементарными операциями со строками матрицы.
- Поменять местами два ряда.
- Умножить одну строку на ненулевое число.
- Добавьте одну строку, кратную одной, в другую строку.
На иллюстрации выше серия таких операций привела к матрице вида
, где звездочки обозначают произвольные числа. В случае трех уравнений с тремя переменными цель состоит в том, чтобы получить матрицу вида
Это не всегда происходит, как мы увидим в следующем разделе.Вот пример, в котором это действительно происходит.
Решение:
Расширенная матрица исходной системы —
Чтобы создать в верхнем левом углу, мы можем умножить строку с 1 на. Однако можно получить без введения дробей, вычтя строку 2 из строки 1. Результат:
Верхний левый угол теперь используется для «очистки» первого столбца, то есть для создания нулей в других позициях в этом столбце.Сначала отнимите строку 1 от строки 2, чтобы получить
Далее вычтите строку 1 из строки 3. Результат:
Это завершает работу над столбцом 1. Теперь мы используем во второй позиции второй строки, чтобы очистить второй столбец, вычитая строку 2 из строки 1 и затем добавляя строку 2 к строке 3. Для удобства обе операции со строками сделано за один шаг. Результат —
Обратите внимание, что две последние манипуляции не повлияли на первый столбец (во второй строке там стоит ноль), поэтому наши предыдущие усилия там не были подорваны.Наконец, мы очищаем третий столбец. Начните с умножения строки 3 на, чтобы получить
.Теперь вычтите временную строку 3 из строки 1, а затем прибавьте умноженную строку 3 к строке 2, чтобы получить
Соответствующие уравнения:, и, которые дают (единственное) решение.
Алгебраический метод, представленный в предыдущем разделе, можно резюмировать следующим образом: Для данной системы линейных уравнений используйте последовательность элементарных операций со строками, чтобы преобразовать расширенную матрицу в «красивую» матрицу (это означает, что соответствующие уравнения легко решить. ).В примере 1.1.3 эта красивая матрица приняла вид
Следующие определения идентифицируют хорошие матрицы, возникающие в этом процессе.
Матрица, как говорят, находится в форме рядов (и будет называться матрицей рядов , если она удовлетворяет следующим трем условиям:
- Все нулевые строки (полностью состоящие из нулей) находятся внизу.
- Первая ненулевая запись слева в каждой ненулевой строке — это a, называемая ведущей для этой строки.
- Каждый ведущий элемент находится справа от всех ведущих строк в строках над ним.
Матрица строка-эшелон называется сокращенной строкой-эшелонной формой (и будет называться сокращенной матрицей строка-эшелон , если, кроме того, она удовлетворяет следующему условию:
4. Каждый ведущий элемент — это единственная ненулевая запись в своем столбце.
Матрицы «строка-эшелон» имеют форму «ступеньки», как показано в следующем примере (звездочки указывают произвольные числа).
Ведущие идут «вниз и вправо» через матрицу. Записи выше и справа от ведущих s произвольны, но все записи ниже и слева от них равны нулю. Следовательно, матрица в виде эшелона строк находится в сокращенной форме, если, кроме того, все записи непосредственно над каждым ведущим равны нулю. Обратите внимание, что матрица в форме эшелона строк может с помощью нескольких дополнительных операций со строками быть приведена к сокращенной форме (используйте операции со строками, чтобы последовательно создавать нули над каждой ведущей единицей, начиная справа).
Важность матриц «строка-эшелон» вытекает из следующей теоремы.
Каждая матрица может быть приведена к (сокращенной) форме строки-эшелона последовательностью элементарных операций со строками.
Фактически, мы можем дать пошаговую процедуру для фактического нахождения матрицы ряда строк. Обратите внимание: несмотря на то, что существует множество последовательностей операций со строками, которые приведут матрицу к форме ряда строк, та, которую мы используем, является систематической и ее легко программировать на компьютере. Обратите внимание, что алгоритм имеет дело с матрицами в целом, возможно, со столбцами нулей.
Шаг 1. Если матрица полностью состоит из нулей, остановитесь — она уже в виде эшелона строк.
Шаг 2. В противном случае найдите первый столбец слева, содержащий ненулевую запись (назовите его), и переместите строку, содержащую эту запись, в верхнюю позицию.
Шаг 3. Теперь умножьте новую верхнюю строку на, чтобы создать интерлиньяж.
Шаг 4. Вычитая числа, кратные этой строке, из строк под ней, сделайте каждую запись ниже начального нуля. Это завершает первую строку, и все дальнейшие операции со строками выполняются с оставшимися строками.
Шаг 5. Повторите шаги 1–4 для матрицы, состоящей из оставшихся строк.
Процесс останавливается, когда либо на шаге 5 не остается строк, либо оставшиеся строки состоят полностью из нулей.
Обратите внимание на то, что алгоритм Гаусса является рекурсивным: после получения первого интервала процедура повторяется для оставшихся строк матрицы. Это упрощает использование алгоритма на компьютере. Обратите внимание, что в решении примера 1.1.3 не использовался гауссовский алгоритм в том виде, в каком он был написан, поскольку первый ведущий не был создан путем деления строки 1 на.Причина этого в том, что он избегает дробей. Однако общий шаблон ясен: создайте ведущие слева направо, используя каждый из них по очереди, чтобы создать нули под ним. Вот один пример.
Решение:
Соответствующая расширенная матрица
Создайте первую ведущую, поменяв местами строки 1 и 2
Теперь вычтите умноженную строку 1 из строки 2 и вычтите умноженную строку 1 из строки 3.Результат —
Теперь вычтите строку 2 из строки 3, чтобы получить
Это означает, что следующая сокращенная система уравнений
эквивалентен исходной системе. Другими словами, у них одинаковые решения. Но эта последняя система явно не имеет решения (последнее уравнение требует этого и удовлетворяет, а таких чисел не существует). Следовательно, исходная система не имеет решения.
Для решения линейной системы расширенная матрица преобразуется в сокращенную форму строки-эшелон, а переменные, соответствующие ведущим, называются ведущими переменными .Поскольку матрица представлена в сокращенной форме, каждая ведущая переменная встречается ровно в одном уравнении, поэтому это уравнение может быть решено для получения формулы для ведущей переменной в терминах не ведущих переменных. Принято называть нелидирующие переменные «свободными» переменными и маркировать их новыми переменными, называемыми параметрами . Каждый выбор этих параметров приводит к решению системы, и каждое решение возникает таким образом. Эта процедура в целом работает и получила название
.Для решения системы линейных уравнений выполните следующие действия:
- Перенести расширенную матрицу \ index {расширенная матрица} \ index {матрица! Расширенная матрица} в сокращенную матрицу-эшелон строк, используя элементарные операции со строками.
- Если возникает строка, система несовместима.
- В противном случае присвойте не ведущие переменные (если они есть) в качестве параметров и используйте уравнения, соответствующие сокращенной матрице строки-эшелон, чтобы найти ведущие переменные в терминах параметров.
Существует вариант этой процедуры, в котором расширенная матрица переносится только в строчно-эшелонированную форму. Не ведущие переменные назначаются как параметры, как и раньше. Затем последнее уравнение (соответствующее форме строки-эшелона) используется для решения последней ведущей переменной в терминах параметров.Эта последняя ведущая переменная затем подставляется во все предыдущие уравнения. Затем второе последнее уравнение дает вторую последнюю ведущую переменную, которая также подставляется обратно. Процесс продолжает давать общее решение. Эта процедура называется обратной заменой . Можно показать, что эта процедура численно более эффективна и поэтому важна при решении очень больших систем.
Рейтинг
Можно доказать, что уменьшенная строка-эшелонированная форма матрицы однозначно определяется.То есть, независимо от того, какая серия операций со строками используется для переноса в сокращенную матрицу эшелонов строк, результатом всегда будет одна и та же матрица. Напротив, это неверно для матриц ряда строк: разные серии операций со строками могут переносить одну и ту же матрицу в разные матрицы ряда строк. В самом деле, матрица может быть перенесена (с помощью одной строковой операции) в матрицу-эшелон строк, а затем с помощью другой строковой операции в (сокращенную) матрицу-эшелон. Однако — это верно, что количество ведущих единиц должно быть одинаковым в каждой из этих матриц эшелонов строк (это будет доказано позже).Следовательно, количество зависит только от того, каким образом приведено в строй.
Ранг матрицы — это количество ведущих s в любой матрице-эшелоне строки, к которой можно перенести операции со строками. Вычислить ранг.Решение:
Приведение к строковой форме
Так как эта матрица эшелонов строк имеет два ведущих s, rank.
Предположим, что ранг, где — матрица со строками и столбцами.Тогда потому что ведущие s лежат в разных строках, и потому что ведущие s лежат в разных столбцах. Более того, у ранга есть полезное приложение к уравнениям. Напомним, что система линейных уравнений называется непротиворечивой, если она имеет хотя бы одно решение.
Проба:
Тот факт, что ранг расширенной матрицы равен, означает, что есть ровно ведущие переменные и, следовательно, точно не ведущие переменные. Все эти нелидирующие переменные назначаются как параметры в гауссовском алгоритме, поэтому набор решений включает в себя именно параметры.Следовательно, если существует хотя бы один параметр, а значит, бесконечно много решений. Если, нет параметров и поэтому единственное решение.
Теорема 1.2.2 показывает, что для любой системы линейных уравнений существуют ровно три возможности:
- Нет решения . Это происходит, когда ряд встречается в форме эшелона строк. Это тот случай, когда система несовместима.
- Уникальное решение . Это происходит, когда каждая переменная является ведущей переменной.
- Бесконечно много решений . Это происходит, когда система согласована и есть хотя бы одна не ведущая переменная, поэтому задействован хотя бы один параметр.
https://www.geogebra.org/m/cwQ9uYCZ
Пожалуйста, ответьте на эти вопросы после открытия веб-страницы:
1. Для данной линейной системы, что представляет каждая из них?
2. Исходя из графика, что можно сказать о решениях? Есть ли у системы одно решение, нет решения или бесконечно много решений? Почему
3.Измените постоянный член в каждом уравнении на 0, что изменилось на графике?
4. Для следующей линейной системы:
Можете ли вы решить это методом исключения Гаусса? Что вы наблюдаете, когда смотрите на график?
Многие важные проблемы включают линейных неравенств , а не линейных уравнений Например, условие для переменных может принимать форму неравенства, а не равенства.Существует метод (называемый симплексным алгоритмом ) для поиска решений системы таких неравенств, который максимизирует функцию вида где и — фиксированные константы.
Система уравнений с переменными называется однородной , если все постоянные члены равны нулю, то есть если каждое уравнение системы имеет вид
Очевидно, решение такой системы; это называется тривиальным решением .Любое решение, в котором хотя бы одна переменная имеет ненулевое значение, называется нетривиальным решением .
Наша главная цель в этом разделе — дать полезное условие, при котором однородная система имеет нетривиальные решения. Следующий пример поучителен.
Решение:
Приведение расширенной матрицы к сокращенной форме эшелона строк описано ниже.
Ведущими переменными являются,, и, например, назначается в качестве параметра.Тогда общее решение:,,,. Следовательно, взяв (скажем), мы получим нетривиальное решение:,,,.
Существование нетривиального решения в примере 1.3.1 обеспечивается наличием параметра в решении. Это связано с тем, что существует нелидирующая переменная (в данном случае). Но здесь должно быть не ведущей переменной, потому что здесь четыре переменные и только три уравнения (и, следовательно, не более три ведущие переменные).Это обсуждение обобщает доказательство следующей основной теоремы.
Если однородная система линейных уравнений имеет больше переменных, чем уравнений, то она имеет нетривиальное решение (фактически бесконечно много).
Проба:
Предположим, что есть уравнения в переменных, где, и пусть обозначают сокращенную строчно-эшелонированную форму расширенной матрицы. Если есть ведущие переменные, есть не ведущие переменные и, следовательно, параметры. Следовательно, достаточно показать это.Но потому что имеет ведущие единицы и строки, и по гипотезе. Итак, что дает.
Обратите внимание, что обратное утверждение теоремы 1.3.1 неверно: если однородная система имеет нетривиальные решения, у нее не должно быть больше переменных, чем у уравнений (система имеет нетривиальные решения, но.)
Теорема 1.3.1 очень полезна в приложениях. В следующем примере представлена иллюстрация из геометрии.
Мы называем график уравнения конической , если числа, и не равны нулю.Покажите, что есть хотя бы одна коника, проходящая через любые пять точек на плоскости, которые не все лежат на одной прямой.Решение:
Пусть координаты пяти точек будут,,, и. График проходов if
Это дает пять уравнений, по одному для каждого, линейных по шести переменным,,,,, и. Следовательно, по теореме 1.1.3 существует нетривиальное решение. Если все пять точек лежат на линии с уравнением, вопреки предположению. Следовательно, один из « отличен от нуля.
Линейные комбинации и базовые решения
Что касается строк, два столбца считаются равными , если они имеют одинаковое количество записей и соответствующие записи одинаковы. Позвольте и быть столбцами с одинаковым количеством записей. Что касается операций с элементарными строками, их сумма получается путем сложения соответствующих записей, и, если это число, скалярное произведение определяется путем умножения каждой записи на. Точнее:
Сумма скалярных кратных нескольких столбцов называется линейной комбинацией этих столбцов.Например, это линейная комбинация и для любого выбора чисел и.
Решение:
Для, мы должны определить, существуют ли числа, и такие, что, то есть
Приравнивание соответствующих элементов дает систему линейных уравнений,, и для,, и. Путем исключения Гаусса решение есть, и где — параметр. Взяв, мы видим, что это линейная комбинация, и.
Обращаясь к, снова ищем, и такие, что; то есть
, что приводит к уравнениям,, и для действительных чисел, и.Но на этот раз существует без решения , как может проверить читатель, а также , а не , линейная комбинация, и.
Наш интерес к линейным комбинациям проистекает из того факта, что они предоставляют один из лучших способов описания общего решения однородной системы линейных уравнений. Когда
решает такую систему с переменными, запишите переменные в виде матрицы столбцов:. Обозначается тривиальное решение. В качестве иллюстрации общее решение в примере 1
.3.1 — это,, и, где — параметр, и теперь мы могли бы выразить это как
, говоря, что общее решение -, где произвольно.
Теперь пусть и — два решения однородной системы с переменными. Тогда любая линейная комбинация этих решений снова оказывается решением системы. В более общем плане:
Фактически, предположим, что типичное уравнение в системе имеет вид, и предположим, что
, являются решениями. Потом и
.
Следовательно, это тоже решение, потому что
Аналогичный аргумент показывает, что Утверждение 1.1 верно для линейных комбинаций более двух решений.
Примечательно то, что каждое решение однородной системы представляет собой линейную комбинацию определенных частных решений, и, фактически, эти решения легко вычисляются с использованием гауссовского алгоритма. Вот пример.
Решить однородную систему с матрицей коэффициентовРешение:
Приведение дополненной матрицы к уменьшенной форме —
, поэтому решениями являются,, и методом исключения Гаусса.Следовательно, мы можем записать общее решение в матричной форме
Вот и частные решения, определяемые гауссовским алгоритмом.
Решения и в примере 1.3.5 обозначены следующим образом:
Алгоритм Гаусса систематически выдает решения для любой однородной линейной системы, называемые базовыми решениями , по одному для каждого параметра.
Кроме того, алгоритм дает стандартный способ выразить каждое решение как линейную комбинацию базовых решений, как в Примере 1.3.5, где общее решение принимает вид
Следовательно, вводя новый параметр, мы можем умножить исходное базовое решение на 5 и таким образом исключить дроби.
По этой причине:
Любое ненулевое скалярное кратное базового решения будет по-прежнему называться базовым решением.
Таким же образом алгоритм Гаусса выдает базовые решения для каждой однородной системы, по одному для каждого параметра (есть нет базовых решений, если система имеет только тривиальное решение).Более того, каждое решение задается алгоритмом как линейная комбинация
этих базовых решений (как в Примере 1.3.5). Если имеет ранг, теорема 1.2.2 показывает, что есть ровно параметры, а значит, и базовые решения. Это доказывает:
Решение:
Приведение расширенной матрицы к сокращенной строчно-эшелонированной форме —
, поэтому общее решение — это,,,, и где, и — параметры.В матричной форме это
Следовательно, базовые решения
Функции Грина и фундаментальные решения
Из теории обыкновенных дифференциальных уравнений мы знаем, что константы могут быть найдены из дополнительных граничных условий. Пространство неограниченно, поэтому условие на бесконечности является одним из таких граничных условий. Константа должна быть равна нулю, если мы ищем решение, исчезающее на бесконечности.Функция f также должна удовлетворять закону сохранения, который для потенциальных проблем означает, что поток от единичного источника должен быть равен полному потоку через любую поверхность S, которая его окружает.
Предположим, что поверхность S является сферой радиуса? можно математически сформулировать закон как
, из которого следует, что константа должна быть равна 1 / (4?).
Таким образом, следуя относительно простым аргументам, мы получили фундаментальное решение f = 1 / (4? R) уравнения Лапласа, которое Грин использовал в своем эссе.Хотя мы не использовали «распределения», фундаментальное решение не является регулярной функцией, поскольку оно стремится к бесконечности, когда r стремится к нулю. Итак, фундаментальное решение — сингулярная функция.
Выше мы предполагали, что начало декартовой системы координат совпадает с точечным источником. Перемещая начало координат в некоторую точку x ‘(x’, y ‘, z’), можно получить более общий вид фундаментального решения
, где расстояние r между точкой x ‘(x’, y ‘, z’) применяемого источника и точкой x (x, y, z) определяется следующим образом:
Это решение удовлетворяет уравнению Лапласа всюду, кроме точки x ‘.
Относительная простота описанной выше процедуры является результатом симметрии задачи. Ту же процедуру можно использовать, например, для получения фундаментального решения уравнения Гельмгольца, которое определяет некоторые задачи распространения волн. Фундаментальное решение этого уравнения представляет собой поле, создаваемое единичным концентрированным источником гармоник. К сожалению, аналогичные задачи для других дифференциальных уравнений в частных производных могут не обладать сферической симметрией. Например, рассмотрим теорию упругости.Чтобы найти фундаментальное решение уравнений упругости Навье-Коши, необходимо решить задачу о неограниченном пространстве, содержащем единичную точечную нагрузку. Поля в задачах теории упругости (перемещения и тяги) являются векторными полями, а не скалярными, как поля в теории потенциала (потенциал и поток). Точечная нагрузка может быть приложена в разных направлениях (например, в направлениях осей x, y, z декартовой системы координат), и смещения, создаваемые этими нагрузками, будут разными в разных направлениях.Этот пример демонстрирует, что в целом проблема поиска фундаментальных решений может быть сложной. Многие фундаментальные решения носят имена людей, которые их получили первыми (например, фундаментальное решение Кельвина, фундаментальное решение Мелана, фундаментальное решение Ронгведа по упругости и т. Д.).
Фундаментальные решения уравнений в частных производных обычно формулируются для бесконечных областей. В некоторых случаях можно найти решения основных дифференциальных уравнений для областей с дополнительными границами или для конечных областей, зная условия на некоторых частях этих границ.2} + p (t) \ frac {dy} {dt} + q (t) y = 0 $ — линейное однородное дифференциальное уравнение второго порядка, где $ p $ и $ q $ непрерывны на открытом интервале $ I $, таком что $ t_0 \ in I $, и пусть $ y = y_1 (t) $ и $ y = y_2 (t) $ — два решения этого дифференциального уравнения. Множество всех линейных комбинаций этих двух решений, $ y = Cy_1 (t) + Dy_2 (t) $, где $ C $ и $ D $ — константы, содержит все решения этого дифференциального уравнения тогда и только тогда, когда существует точка $ t_0 $, для которого вронксиан $ y_1 $ и $ y_2 $ в $ t_0 $ отличен от нуля, то есть $ W (y_1, y_2) \ biggr \ rvert_ {t_0} \ neq 0 $.2} + p (t) \ frac {dy} {dt} + q (t) y = 0 $ и предположим, что $ y = \ phi (t) $ также является произвольным решением. Мы хотим показать, что $ \ phi (t) $ представляет собой линейную комбинацию $ y_1 $ и $ y_2 $ для некоторых констант $ C $ и $ D $.
- $ \ Leftarrow $ Пусть $ t_0 $ таково, что вронскиан для $ y_1 $ и $ y_2 $, вычисленный в $ t_0 $, отличен от нуля, то есть:
\ begin {align} \ quad W (y_1, y_2) \ biggr \ rvert_ {t_0} \ neq 0 \ end {align}
- Возьмите это значение $ t_0 $ и на этом этапе оцените как $ \ phi $, так и $ \ phi ‘$.2} + p (t) \ frac {dy} {dt} + q (t) y = 0 $ с начальными условиями $ y (t_0) = y_0 $ и $ y ‘(t_0) = y’_0 $. Функция $ \ phi $ удовлетворяет этому дифференциальному уравнению. Поскольку $ W (y_1, y_2) \ biggr \ rvert_ {t_0} \ neq 0 $, то существуют константы $ C $ и $ D $ такие, что $ y = Cy_1 (t) + Dy_2 (t) $ удовлетворяет этому проблема начального значения. Но поскольку $ p $ и $ q $ непрерывны на открытом интервале $ I $, содержащем $ t_0 $, это означает, что существует единственное решение, и поэтому:
\ begin {align} \ phi (t) = Cy_1 (t) + Dy_2 (t) \ end {align}
- Итак, все решения этого дифференциального уравнения представляют собой линейную комбинацию решений $ y = y_1 (t) $ и $ y = y_2 (t) $.
- $ \ Rightarrow $ Предположим, что каждая точка $ t_0 \ in I $ такова, что $ W (y_1, y_2) \ biggr \ rvert_ {t_0} = 0 $, то есть не существует точки $ t_0 $ на $ I $, где вронскиан для $ y_1 $ и $ y_2 $, оцененный как $ t_0 $, отличен от нуля. Пусть $ y_0 $ и $ y’_0 $ будут значениями, для которых система $ \ left \ {\ begin {matrix} Cy_1 (t_0) + Dy_2 (t_0) = y_0 \\ Cy_1 ‘(t_0) + Dy_2’ (t_0) = y’_0 \ end {matrix} \ right. $ не имеет решений для набора констант $ C $ и $ D $.
- Теперь, поскольку $ p $ и $ q $ непрерывны на открытом интервале $ I $, содержащем $ t_0 $, такое решение $ \ phi (t) $ удовлетворяет начальным условиям $ y (t_0) = y_0 $ и $ y ‘(t_0) = y’_0 $.2} + p (t) \ frac {dy} {dt} + q (t) y = 0 $ даются по формуле: (3)
\ begin {align} \ quad y = Cy_1 (t) + Dy_2 (t) \ end {align}
Также обратите внимание, что до сих пор мы не говорили, что $ y = y_1 (t) $ и $ y = y_2 (t) $ должны быть разными. Однако с помощью приведенной выше теоремы мы видим, что если $ y_1 (t) = y_2 (t) $, то вронскиан $ W (y_1, y_2) = W (y_1, y_1) = W (y_2, y_2) $ равен нулю ( как вы должны проверить), и поэтому не все решения линейного однородного дифференциала второго порядка даются линейной комбинацией всего $ y_1 $.2} + p (t) \ frac {dy} {dt} + q (t) y = 0 $, где $ p $ и $ q $ непрерывны на открытом интервале $ I $, таком что $ t_0 \ in I $ и пусть $ y = y_1 (t) $ и $ y = y_2 (t) $ — решения этого дифференциального уравнения. Если вронскиан $ W (y_1, y_2) \ neq 0 $, то набор линейных комбинаций $ y_1 $ и $ y_2 $ известен как Фундаментальный набор решений этого дифференциального уравнения.
Из определения выше мы видим, что если мы можем найти два решения $ y = y_1 (t) $ и $ y = y_2 (t) $, для которых вронскиан $ W (y_1, y_2) $ отличен от нуля, то $ y_1 $ и $ y_2 $ образуют фундаментальный набор решений.2 y} {dt} + p (t) \ frac {dy} {dt} + q (t) y = 0 $ — линейное однородное дифференциальное уравнение второго порядка, где $ p $ и $ q $ непрерывны на открытом интервале. $ I $ такое, что $ t_0 \ in I $. Если $ y = y_1 (t) $ является решением этого дифференциального уравнения, которое удовлетворяет начальным условиям $ y_1 (t_0) = 1 $ и $ y_1 ‘(t_0) = 0 $, и если $ y = y_2 (t) $ — решение этого дифференциального уравнения, удовлетворяющее начальным условиям $ y_2 (t_0) = 0 $ и $ y_2 ‘(t_0) = 1 $. Тогда $ y_1 $ и $ y_2 $ образуют фундаментальный набор решений этого дифференциального уравнения. (4)
\ begin {align} \ quad W (y_1, y_2) \ biggr \ rvert_ {t_0} = \ begin {vmatrix} y_1 (t_0) & y_2 (t_0) \\ y_1 ‘(t_0) & y_2’ (t_0) \ конец {vmatrix} = \ begin {vmatrix} 1 & 0 \\ 0 & 1 \ end {vmatrix} = 1 \ neq 0 \ end {align}
- Таким образом, из теоремы 1 следует, что ВСЕ решения этого дифференциального уравнения задаются формулами $ y = Cy_1 (t) + Dy_2 (t) $, где $ C $ и $ D $ — константы. Таким образом, $ y_1 $ и $ y_2 $ образуют фундаментальный набор решений этого дифференциального уравнения. $ \ blacksquare $
404 Не найдено
404 Не найденоЗапрошенный URL / ~ aterras / matrix% 2520exp% 2520etc.pdf не найден на этом сервере.
Наиболее частые причины этой ошибки:
- Вы неправильно ввели URL-адрес, к которому вы пытаетесь получить доступ. Тщательно проверьте орфографию, пунктуацию и чувствительность к регистру URL-адреса и повторите попытку.
- Файл или каталог, к которому вы пытаетесь получить доступ, больше не существует или был перемещен в другое место.
Информацию о веб-сайтах класса см. В списке веб-сайтов класса по адресу http://www.math.ucsd.edu/resources/course-websites/.
Для других веб-страниц, пожалуйста, начните с веб-сайта верхнего уровня математического факультета UCSD по адресу http://www.math.ucsd.edu/.
Чтобы связаться с администраторами веб-сервера, отправьте электронное письмо по адресу [email protected].
Чтобы мы могли должным образом устранить проблему, включите:
- Точный URL-адрес, который вы пытаетесь получить, указан в вашем веб-браузере:
REQUEST_URI = http: // math.ucsd.edu/~aterras/matrix%2520exp%2520etc.pdf - Предыдущая ссылающаяся веб-страница или ссылка, которая привела вас на этот URL:
HTTP_REFERER = (нет) - Полное имя используемого вами веб-браузера, включая номер его версии:
HTTP_USER_AGENT = Mozilla / 5.0 (X11; Linux x86_64; rv: 33.0) Gecko / 20100101 Firefox / 33.0 - Любые сообщения об ошибках или подробное описание возникшей проблемы.
- Название вашей операционной системы, включая номер ее версии.
- Текущий IP-адрес или имя хоста вашего компьютера:
REMOTE_ADDR (REMOTE_HOST) = 85.140.4.235 (235.mtsnet.ru) - Точная дата и время, когда вы столкнулись с проблемой:
DATE_LOCAL = среда, 14-июл-2021 18:48:37 PDT
Сопоставьте линейные уравнения третьего порядка с их наборами фундаментальных решений. 1. y ′ ′ ′ — 6y ′ ′ + y′ − 6y = 0 2.
Фундаментальные системы решений линейных уравнений третьего порядка не приводятся.(-t)
Пошаговое объяснение:
Учитывая следующие дифференциальные уравнения
(1) y » ‘- 6y’ ‘+ y’ — 6y = 0
(2) y » ‘- 8y ‘+ 15y’ = 0
(3) y » ‘+ y’ = 0
(4) y » ‘- y’ ‘- y’ + y = 0
(5) ty » ‘- y’ ‘= 0
(6) y’ » + 3y » + 3y ‘+ y = 0
РЕШЕНИЯ
(1) y’ » — 6y ‘+ y’ — 6y = 0
Записываем характеристическое уравнение и решаем. (- t)
Метод изменения параметров
Эта страница посвящена дифференциальным уравнениям второго порядка этого типа:
d 2 y dx 2 + P (x) dy dx + Q (x) y = f (x)
где P (x), Q (x) и f (x) — функции от x.
Два метода
Есть два основных метода решения уравнений, например
d 2 y dx 2 + P (x) dy dx + Q (x) y = f (x)
Undetermined Coefficients, который работает только тогда, когда f (x) является полиномом, экспонентой, синусом, косинусом или их линейной комбинацией.
Вариация параметров (который мы узнаем здесь), который работает с широким спектром функций, но немного беспорядок в использовании.
Изменение параметров
Для простоты рассмотрим только корпус:
d 2 y dx 2 + p dy dx + qy = f (x)
где p и q — константы, а f (x) — ненулевая функция от x.Полное решение такого уравнения может быть найдено сочетая два типа решения:
- Общее решение однородное уравнение d 2 y dx 2 + p dy dx + qy = 0
- Частные решения неоднородное уравнение d 2 y dx 2 + p dy dx + qy = f (x)
Обратите внимание, что f (x) может быть одной функцией или суммой двух или более функции.
Как только мы нашли общее решение и все частные решений, то окончательное полное решение находится путем добавления всех решения вместе.
Этот метод основан на интеграции.
Проблема с этим методом заключается в том, что, хотя он может дать решение, в некоторых случаях решение нужно оставить в виде интеграла.
Начните с общего решения
При введении в дифференциальные уравнения второго порядка мы узнаем, как найти общее решение.
В основном мы берем уравнение
d 2 y dx 2 + p dy dx + qy = 0
и свести его к «характеристическому уравнению»:
р 2 + пр + д = 0
Квадратное уравнение, которое имеет три возможных типа решения в зависимости от дискриминанта p 2 — 4q . Когда p 2 — 4q — это
положительный получаем два действительных корня, и решение
y = Ae r 1 x + Be r 2 x
ноль получаем один действительный корень, а решение —
y = Ae rx + Bxe rx
отрицательный получаем два комплексных корня r 1 = v + wi и r 2 = v — wi , и решение равно
y = e vx (Ccos (wx) + iDsin (wx))
Фундаментальные решения уравнения
Во всех трех случаях «y» состоит из двух частей:
- y = Ae r 1 x + Be r 2 x состоит из y 1 = Ae r 1 x и y
7 = r 2 x
- y = Ae rx + Bxe rx состоит из y 1 = Ae rx и y 2 = Bxe rx
- y = e vx (Ccos (wx) + iDsin (wx)) состоит из y 1 = e vx Ccos (wx) и y 2 = e vx iDsin (шх)
y 1 и y 2 известны как фундаментальные решения уравнения
И y 1 и y 2 называются линейно независимый , потому что ни одна функция не является постоянным кратным Другие.
Вронскианец
Когда y 1 и y 2 являются двумя фундаментальными решениями однородного уравнения
d 2 y dx 2 + p dy dx + qy = 0
, то вронскиан W (y 1 , y 2 ) является определяющим матрицы
Так
W (y 1 , y 2 ) = y 1 y 2 ‘ — y 2 y 1 ‘
Вронскиан назван в честь польского математика и философ Юзеф Хене-Вронский (1776–1853).
Поскольку y 1 и y 2 линейно независимы, значение вронскиана не может равняться нулю.
Особое решение
Используя вронскиан, мы можем теперь найти частное решение дифференциального уравнения
d 2 y dx 2 + p dy dx + qy = f (x)
по формуле:
y p (x) = −y 1 (x) ∫ y 2 (x) f (x) W (y 1 , y 2 ) dx + y 2 (x) ∫ y 1 (x) f (x) W (y 1 , y 2 ) dx
Пример 1: Решить
d 2 y dx 2 — 3 dy dx + 2y = e 3x1.Найдите общее решение для d 2 y dx 2 — 3 dy dx + 2y = 0
Характеристическое уравнение: r 2 — 3r + 2 = 0
Фактор: (r — 1) (r — 2) = 0
r = 1 или 2
Итак, общее решение дифференциального уравнения: y = Ae x + Be 2x
Итак, в этом случае фундаментальные решения и их производные:
y 1 (x) = e x
y 1 ‘(x) = e x
y 2 (x) = e 2x
y 2 ‘(x) = 2e 2x
2.Найдите вронскиана:
W (y 1 , y 2 ) = y 1 y 2 ‘ — y 2 y 1 ‘= 2e 3x — e 3x = e 3x
3. Найдите частное решение по формуле:
y p (x) = −y 1 (x) ∫ y 2 (x) f (x) W (y 1 , y 2 ) dx + y 2 (x) ∫ y 1 (x) f (x) W (y 1 , y 2 ) dx
4.Сначала решаем интегралы:
∫ y 2 (x) f (x) W (y 1 , y 2 ) dx
= ∫ e 2x e 3x e 3x dx
= ∫e 2x dx
= 1 2e 2x
Итак:
−y 1 (x) ∫ y 2 (x) f (x) W (y 1 , y 2 ) dx = — (e x ) ( 1 2e 2x ) = — 1 2e 3x
А также:
∫ y 1 (x) f (x) W (y 1 , y 2 ) dx
= ∫ e x e 3x e 3x dx
= ∫e x dx
= e x
Итак:
y 2 (x) ∫ y 1 (x) f (x) W (y 1 , y 2 ) dx = (e 2x ) (e x ) = e 3x
Наконец:
y p (x) = −y 1 (x) ∫ y 2 (x) f (x) W (y 1 , y 2 ) dx + y 2 (x) ∫ y 1 (x) f (x) W (y 1 , y 2 ) dx
= — 1 2e 3x + e 3x
= 1 2e 3x
и полное решение дифференциального уравнения d 2 y dx 2 — 3 dy dx + 2y = e 3x is
y = Ae x + Be 2x + 1 2e 3x
Что выглядит следующим образом (примеры значений A и B):
Пример 2: Решить
d 2 y dx 2 — y = 2x 2 — x — 31.Найти общее решение d 2 y dx 2 — y = 0
Характеристическое уравнение: r 2 — 1 = 0
Фактор: (r — 1) (r + 1) = 0
r = 1 или −1
Итак, общее решение дифференциального уравнения: y = Ae x + Be −x
Итак, в этом случае фундаментальные решения и их производные:
y 1 (x) = e x
y 1 ‘(x) = e x
y 2 (x) = e −x
y 2 ‘(x) = −e −x
2.Найдите вронскиана:
W (y 1 , y 2 ) = y 1 y 2 ‘ — y 2 y 1 ‘= −e x e −x — e x e −x = −2
3. Найдите частное решение по формуле:
y p (x) = −y 1 (x) ∫ y 2 (x) f (x) W (y 1 , y 2 ) dx + y 2 (x) ∫ y 1 (x) f (x) W (y 1 , y 2 ) dx
4.Решите интегралы:
∫ y 2 (x) f (x) W (y 1 , y 2 ) dx
= ∫ e −x (2x 2 −x − 3) −2 dx
= — 1 2 ∫ (2x 2 −x − 3) e −x dx
= — 1 2 [- (2x 2 −x − 3) e −x + ∫ (4x − 1) e −x dx]
= — 1 2 [- (2x 2 −x − 3) e −x — (4x — 1) e −x + ∫4e −x dx ]
= — 1 2 [- (2x 2 −x − 3) e −x — (4x — 1) e −x — 4e −x ]
= e −x 2 [2x 2 — x — 3 + 4x −1 + 4]
= e −x 2 [2x 2 + 3x]
Итак:
−y 1 (x) ∫ y 2 (x) f (x) W (y 1 , y 2 ) dx = (−e x ) [ e −x 2 ( 2x 2 + 3x)] = — 1 2 (2x 2 + 3x)
А этот:
∫ y 1 (x) f (x) W (y 1 , y 2 ) dx
= ∫ e x (2x 2 −x − 3) −2 dx
= — 1 2 ∫ (2x 2 −x − 3) e x dx
= — 1 2 [(2x 2 −x − 3) e x — ∫ (4x − 1) e x dx]
= — 1 2 [(2x 2 −x − 3) e x — (4x — 1) e x + ∫4e x dx ]
= — 1 2 [(2x 2 −x − 3) e x — (4x — 1) e x + 4e x ]
= −e x 2 [2x 2 — x — 3 — 4x + 1 + 4]
= −e x 2 [2x 2 — 5x + 2]
Итак:
y 2 (x) ∫ y 1 (x) f (x) W (y 1 , y 2 ) dx = (e −x ) [ −e x 2 ( 2x 2 — 5x + 2)] = — 1 2 ( 2x 2 — 5x + 2)
Наконец:
y p (x) = −y 1 (x) ∫ y 2 (x) f (x) W (y 1 , y 2 ) dx + y 2 (x) ∫ y 1 (x) f (x) W (y 1 , y 2 ) dx
= — 1 2 (2x 2 + 3x) — 1 2 (2x 2 — 5x + 2)
= — 1 2 (4x 2 — 2x + 2)
= −2x 2 + x — 1
и полное решение дифференциального уравнения d 2 y dx 2 — y = 2x 2 — x — 3 равно
y = Ae x + Be −x — 2x 2 + x — 1
(Это тот же ответ, который мы получили в Примере 1 на странице Метод неопределенных коэффициентов.)
Пример 3: Решить
d 2 y dx 2 — 6 dy dx + 9y = 1 x1. Найти общее решение
d y dx 2 -6 dy dx + 9y = 0
Характеристическое уравнение: r 2 — 6r + 9 = 0
Фактор: (r — 3) (r — 3) = 0
г = 3
Итак, общее решение дифференциального уравнения: y = Ae 3x + Bxe 3x
Итак, в этом случае фундаментальные решения и их производные:
y 1 (x) = e 3x
y 1 ‘(x) = 3e 3x
y 2 (x) = xe 3x
y 2 ‘(x) = (3x + 1) e 3x
2.Найдите вронскиана:
W (y 1 , y 2 ) = y 1 y 2 ‘ — y 2 y 1 ‘= (3x + 1) e 3x e 3x — 3xe 3x e 3x = e 6x
3. Найдите частное решение по формуле:
y p (x) = −y 1 (x) ∫ y 2 (x) f (x) W (y 1 , y 2 ) dx + y 2 (x) ∫ y 1 (x) f (x) W (y 1 , y 2 ) dx
4.Решите интегралы:
∫ y 2 (x) f (x) W (y 1 , y 2 ) dx
= ∫ (xe 3x ) x −1 e 6x dx (Примечание: 1 x = x −1 )
= ∫e −3x dx
= — 1 3e −3x
Итак:
−y 1 (x) ∫ y 2 (x) f (x) W (y 1 , y 2 ) dx = — (e 3x ) (- 1 3e −3x ) = 1 3
А этот:
∫ y 1 (x) f (x) W (y 1 , y 2 ) dx
= ∫ e 3x x −1 e 6x dx
= ∫e −3x x −1 dx
Это не может быть интегрировано, поэтому это пример, когда ответ оставить как интеграл.
Итак:
y 2 (x) ∫ y 1 (x) f (x) W (y 1 , y 2 ) dx = (xe 3x ) (∫e −3x x −1 dx ) = xe 3x ∫e −3x x −1 dx
Наконец:
y p (x) = −y 1 (x) ∫ y 2 (x) f (x) W (y 1 , y 2 ) dx + y 2 (x) ∫ y 1 (x) f (x) W (y 1 , y 2 ) dx
= 1 3 + xe 3x ∫e −3x x −1 dx
Итак, полное решение дифференциального уравнения d 2 y dx 2 — 6 dy dx + 9y = 1 x равно
y = Ae 3x + Bxe 3x + 1 3 + xe 3x ∫e −3x x −1 dx
Пример 4 (более сложный пример): Решить
d 2 y dx 2 -6 dy dx + 13y = 195cos (4x)В этом примере используются следующие тригонометрические удостоверения
sin 2 (θ) + cos 2 (θ) = 1
sin (θ ± φ) = sin (θ) cos (φ) ± cos (θ) sin (φ)
cos (θ ± φ) = cos (θ) cos (φ) sin (θ) sin (φ)
sin (θ) cos (φ) = 1 2 [sin (θ
+ φ) + sin (θ — φ)]
cos (θ) cos (φ) = 1 2 [cos (θ
— φ) + cos (θ + φ)]
1.Найдите общее решение для d 2 y dx 2 -6 dy dx + 13y = 0
Характеристическое уравнение: r 2 — 6r + 13 = 0
Используйте квадратное уравнение формула
x = −b ± √ (b 2 — 4ac) 2a
с a = 1, b = −6 и c = 13
Итак:
r = — (- 6) ± √ [(- 6) 2 — 4 (1) (13)] 2 (1)
= 6 ± √ [36−52] 2
= 6 ± √ [−16] 2
= 6 ± 4i 2
= 3 ± 2i
Итак, α = 3 и β = 2
⇒ y = e 3x [Acos (2x) + iBsin (2x)]
Итак, в данном случае имеем:
y 1 (x) = e 3x cos (2x)
y 1 ‘(x) = e 3x [3cos (2x) — 2sin (2x)]
y 2 (x) = e 3x sin (2x)
y 2 ‘(x) = e 3x [3sin (2x) + 2cos (2x)]
2.Найдите вронскиана:
W (y 1 , y 2 ) = y 1 y 2 ‘- y 2 y 1 ‘
= e 6x cos (2x) [3sin (2x) + 2cos (2x)] — e 6x sin (2x) [3cos (2x) — 2син (2х)]
= e 6x [3cos (2x) sin (2x) + 2cos 2 (2x) — 3sin (2x) cos (2x) + 2sin 2 (2x)]
= 2e 6x
3. Найдите частное решение по формуле:
y p (x) = −y 1 (x) ∫ y 2 (x) f (x) W (y 1 , y 2 ) dx + y 2 (x) ∫ y 1 (x) f (x) W (y 1 , y 2 ) dx
4.Решите интегралы:
∫ y 2 (x) f (x) W (y 1 , y 2 ) dx
= ∫ e 3x sin (2x) [195cos (4x)] 2e 6x dx
= 195 2 ∫e −3x sin (2x) cos (4x) dx
= 195 4 ∫e −3x [sin (6x) — грех (2x)] dx … (1)
В этом случае мы еще не выполняем интеграцию по причинам, которые проясняются в мгновение ока.
Другой интеграл:
∫ y 1 (x) f (x) W (y 1 , y 2 ) dx
= ∫ e 3x cos (2x) [195cos (4x)] 2e 6x dx
= 195 2 ∫e −3x cos (2x) cos (4x) dx
= 195 4 ∫e −3x [cos (6x) + cos (2x)] dx … (2)
Из уравнений (1) и (2) мы видим, что есть четыре очень похожих
интеграций, которые нам необходимо выполнить:
I 1 = ∫e −3x sin (6x) dx
I 2 = ∫e −3x sin (2x) dx
I 3 82 = ∫e 82 — ∫e 3x cos (6x) dx
I 4 = ∫e −3x cos (2x) dx
Каждый из них может быть получен путем двукратного использования интеграции по частям, но есть более простой способ:
I 1 = ∫e −3x sin (6x) dx = — 1 6 e −3x cos (6x) — 3 6 ∫e −3x cos (6x) dx = — 1 6 e −3x cos (6x) — 1 2 I 3
⇒ 2 I 1 + I 3 = — 1 3e −3x cos (6x) … (3)
I 2 = ∫e −3x sin (2x) dx = — 1 2 e −3x cos (2x) — 3 2∫e −3x cos (2x) dx = — 1 2e −3x cos (2x) — 3 2 I 4
⇒ 2 I 2 + 3 I 4 = — e −3x cos (2x) … (4)
I 3 = ∫e −3x cos (6x) dx
= 1 6 e −3x sin (6x)
+ 3 6 ∫e −3x sin (6x) dx
= 1 6 e −3x sin (6x)
+ 1 2 I 1
⇒ 2 I 3 — I 1 = 1 3e −3x sin (6x)
… (5)
I 4 = ∫e −3x cos (2x) dx
= 1 2 e −3x sin (2x)
+ 3 2∫e −3x sin (2x) dx
= 1 2e −3x sin (2x) + 3 2 I 2
⇒ 2 I 4 — 3 I 2 = e −3x sin (2x) … (6)
Решите уравнения (3) и (5) одновременно:
2 I 1 + I 3 = — 1 3e −3x cos (6x) … (3)
2 I 3 — I 1 = 1 3e −3x sin (6x) … (5)
Умножьте уравнение (5) на 2 и сложите их вместе (член I 1 нейтрализует):
⇒ 5 I 3 = — 1 3e −3x cos (6x) + 2 3e −3x sin (6x)
= 1 3e −3x [2sin (6x) — cos (6x)]
⇒ I 3 = 1 15e −3x [2sin (6x) — cos (6x)]
Умножьте уравнение (3) на 2 и вычтите (член I 3 нейтрализует):
⇒ 5 I 1 = — 2 3e −3x cos (6x) — 1 3e −3x sin (6x)
= — 1 3e −3x [2cos (6x) + грех (6x)]
⇒ I 1 = — 1 15e −3x [2cos (6x) + грех (6x)]
Решите уравнения (4) и (6) одновременно:
2 I 2 + 3 I 4 = — e −3x cos (2x)… (4)
2 I 4 -3 I 2 = e −3x sin (2x) … (6)
Умножьте уравнение (4) на 3 и уравнение (6) на 2 и сложите (член I 2 нейтрализует):
⇒ 13 I 4 = — 3e −3x cos (2x) + 2e −3x sin (2x)
= e −3x [2sin (2x) — 3 cos (2x)]
⇒ I 4 = 1 13e −3x [2sin (2x) — 3cos (2x)]
Умножьте уравнение (4) на 2 и уравнение (6) на 3 и вычтите (член I 4 нейтрализует):
⇒ 13 I 2 = — 2e −3x cos (2x) — 3e −3x sin (2x)
= — e −3x [2cos (2x) + 3 sin (2x)]
⇒ I 2 = — 1 13e −3x [2cos (2x) + 3sin (2x)]
Заменить в (1) и (2):
∫ y 2 (x) f (x) W (y 1 , y 2 ) dx
= 195 4∫e −3x [sin (6x) — sin (2x)] dx… (1)
= 195 4 [ — 1 15e −3x [2cos (6x) + sin (6x)] — [- 1 13e −3x [2cos (2x) + 3sin (2x)]]]
= e −3x 4 [−13 (2cos (6x) + sin (6x)) + 15 (2 cos (2x) + 3sin (2x))]
∫ y 1 (x) f (x) W (y 1 , y 2 ) dx
= 195 4 ∫e −3x [cos (6x) + cos (2x)] dx… (2)
= 195 4 [ 1 15e −3x [2sin (6x) — cos (6x)] + 1 13e −3x [2sin (2x) — 3cos (2x)]]
= e −3x 4 [13 (2sin (6x) — cos (6x)) + 15 (2sin (2x) — 3cos (2x))]
Итак, y p (x) = −y 1 (x) ∫ y 2 (x) f (x) W (y 1 , y 2 ) dx + y 2 (x) ∫ y 1 (x) f (x) W (y 1 , y 2 ) dx
= — e 3x cos (2x) e −3x 4 [−13 (2cos (6x) + sin (6x)) + 15 (2 cos (2x) + 3sin (2x))] + e 3x sin (2x) e −3x 4 [13 (2sin (6x) — cos (6x)) + 15 (2sin (2x) — 3cos (2x))]
= — 1 4cos (2x) [−13 (2cos (6x) — sin (6x)) + 15 (2 cos (2x) + 3sin (2x))] + 1 4 sin (2x) [13 (2sin (6x) — cos (6x)) + 15 (2 sin (2x) — 3cos (2x))]
= 1 4 [26cos (2x) cos (6x) + 13cos (2x) sin (6x) — 30cos 2 (2x) — 45cos (2x) sin (2x) + 26sin (2x) sin (6x) — 13sin (2x) cos (6x) + 30sin 2 (2x) — 45sin (2x) cos (2x)]
= 1 4 [26 [cos (2x) cos (6x) + sin (2x) sin (6x)] + 13 [cos (2x) sin (6x) — sin (2x) cos (6x)] — 30 [cos 2 (2x) — sin 2 (2x)] — 45 [cos (2x) sin (2x) + sin (2x) cos (2x)]]
= 1 4 [26cos (4x) + 13sin (4x) — 30cos (4x) — 45sin (4x)]
= 1 4 [−4cos (4x) — 32sin (4x)]
= −cos (4x) — 8 sin (4x)
Итак, полное решение дифференциального уравнения d 2 y dx 2 — 6 dy dx + 13y = 195cos (4x) — это
y = e 3x (Acos (2x) + iBsin (2x)) —
cos (4x) — 8sin (4x)
9529, 9530, 9531, 9532, 9533, 9534, 9535, 9536, 9537, 9538
.