Сумма нескольких векторов
Материал урока.
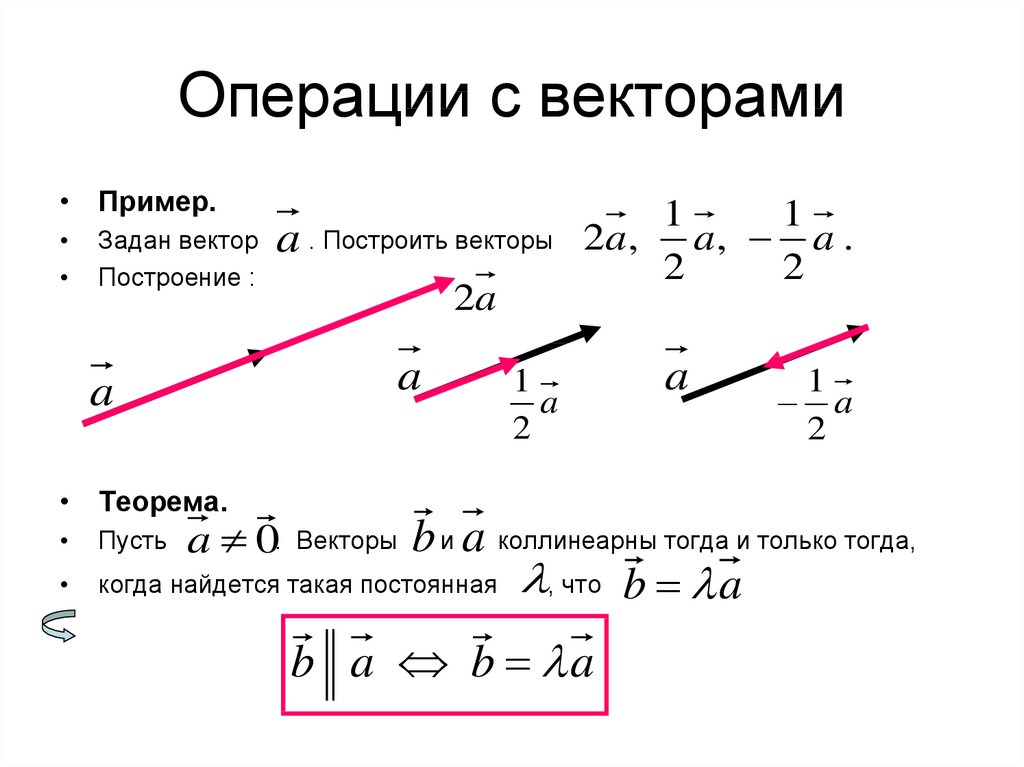
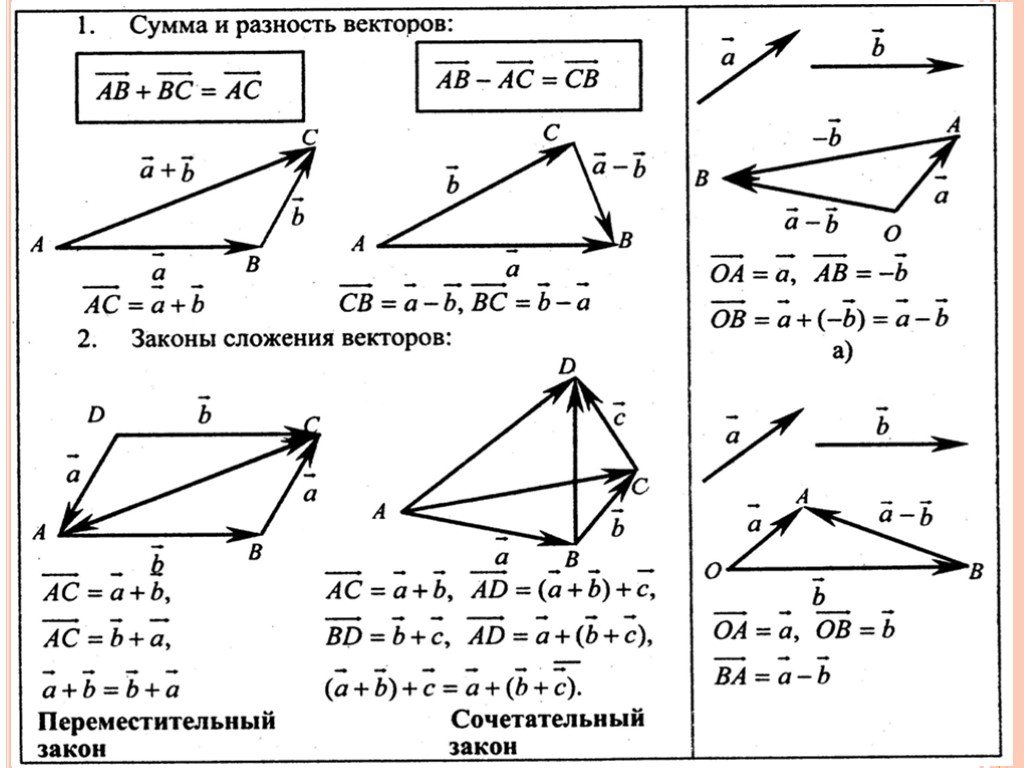
Вам уже известны правила сложения и вычитания двух векторов.
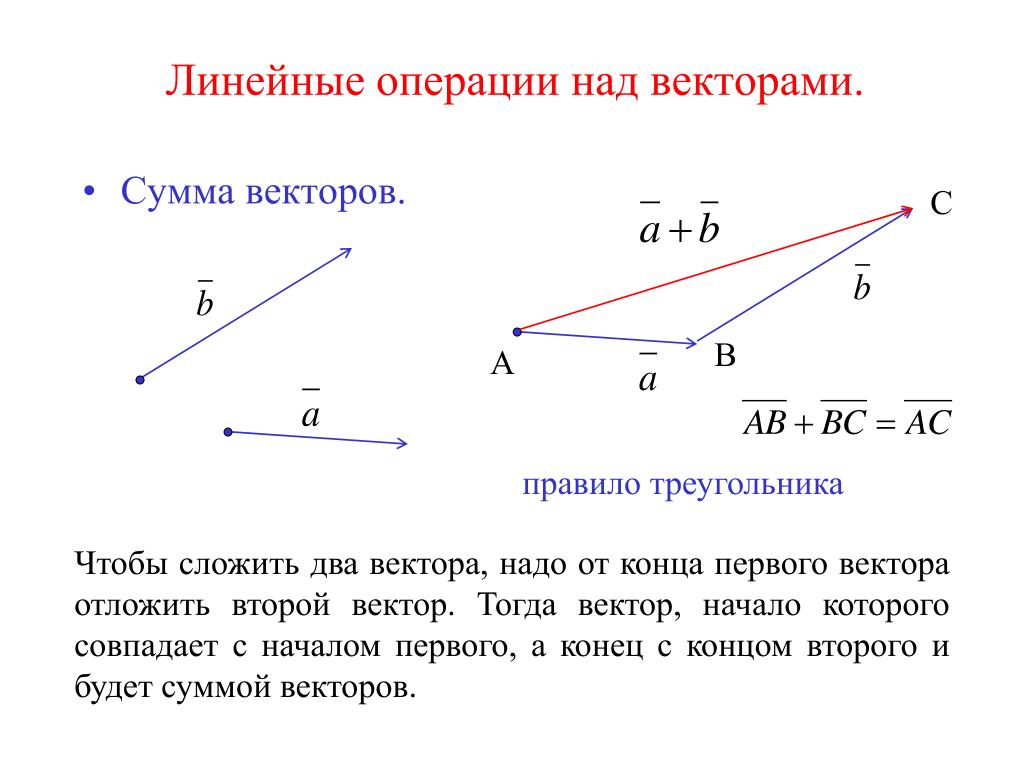
Чтобы сложить два неколлинеарных вектора и по правилу треугольника, нужно от некоторой точки А отложить вектор , равный вектору . Далее от точки B отложить вектор , равный вектору . Вектор является вектором суммы двух векторов и .
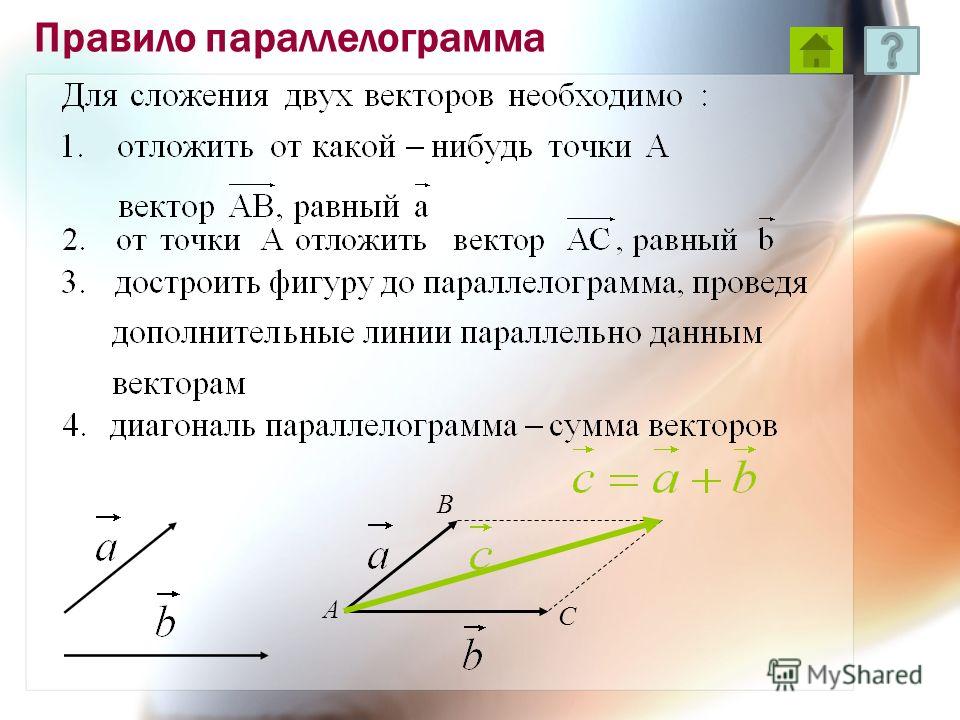
Чтобы сложить два вектора по правилу параллелограмма, нужно отложить от произвольной точки А векторы и , равные векторам и соответственно, и построить на них параллелограмм ABCD. Тогда вектор равен сумме векторов и .
Также вам уже знакомы законы сложения векторов: переместительный и сочетательный.
Ну,
а убедившись в том, что разность векторов и
равна
сумме вектора и
вектора, противоположного вектору ,
мы получили два способа построения вектора разности двух векторов.
Сегодня мы будем учиться складывать несколько векторов в пространстве. Но сначала вспомним, как мы это делали на плоскости.
Построим вектор суммы векторов , и .
От некоторой точки А отложим вектор , равный вектору . Далее от точки B отложим вектор , равный вектору . А от точки C отложим вектор , равный вектору .
Будем последовательно складывать наши векторы, пользуясь правилом треугольника.
Сумма векторов и равна вектору .
Теперь к вектору добавим вектор . В результате мы получаем вектор .
Тогда можем сказать, что сумма векторов , и . равна вектору .
Так, последовательно складывая первый вектор со вторым, затем их сумму с третьим и так далее, можно найти суммы четырёх, пяти и большего числа векторов.
Такое правило построения суммы векторов называют правилом многоугольника
, и оно позволяет построить вектор суммы неограниченного количества векторов.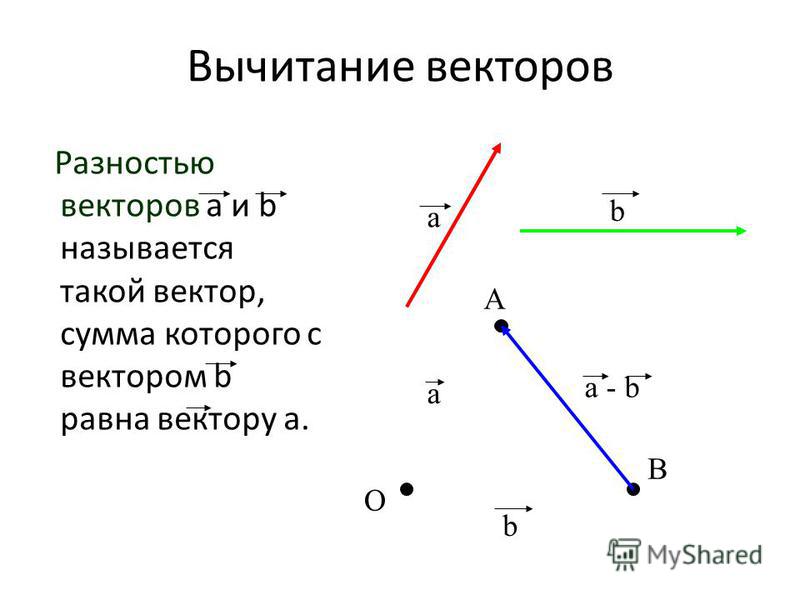
Задача. Построить вектор суммы попарно неколлинеарных векторов , , , и .
Построение.
Примеры, приведённые нами, подходят для векторов, лежащих в одной плоскости. А мы, изучая стереометрию, находимся в пространстве, поэтому правило многоугольника сложения векторов в пространстве может иметь и другую иллюстрацию.
Задача. Рассмотрим векторы , и , такие, что , лежат в одной плоскости, а вектор не лежит в этой плоскости. Найдём сумму этих векторов.
Решение.
Выберем любую удобную точку О в пространстве и отложим от неё вектор , равный вектору , а от точки А отложим вектор , равный вектору . Понятно, что через проведённые векторы можно провести плоскости. Далее, от точки B отложим вектор , равный вектору . Вектором суммы данных векторов является вектор .
Вы
видите, что многоугольник сложения в данном случае является пространственным,
то есть не все его вершины лежат в одной плоскости.
Сформулируем правило многоугольника для произвольных точек пространства А1, А2 ,…, Аn.
Это равенство справедливо для любых точек А1, А2, …, An. И, в частности, для случая, когда некоторые из них совпадают.
Например, если начало первого вектора совпадает с концом последнего, то сумма данных векторов равна .
Задача. Упростить выражения
Выполним задание, где, пользуясь данной формулировкой, упростим выражения.
а)
б)
в)
г) =
Так мы с вами рассмотрели примеры преобразования выражений с векторами, представленных в виде алгебраической суммы.
Задача. , , , произвольные точки пространства.
Представить вектор в виде алгебраической суммы векторов:
а) , , б) , , в) , ,
Решение.
В последнем задании рассмотрим параллелепипед ABCDA1B1C1D1.
Нужно указать вектор , начало и конец которого являются вершинами параллелепипеда. И чтобы истинными были данные равенства.
Сумма векторов .
По рисунку понятно, чтобы восстановить правило многоугольника, не достает вектора . Значит, вектор .
Далее рассмотрим выражение, где сумма векторов .
По рисунку понятно, что сумма известных векторов из левой части равенства равна вектору . И чтобы вся сумма равнялась вектору , вектор должен быть равен вектору .
Перейдём к следующему равенству.
Чтобы восстановить правило многоугольника, вектор удобнее заменить равным ему вектором . Тогда становится понятно, что вектор «-» равен вектору . А вектор отсюда равен вектору .
Разберёмся с последним равенством. .
Левую
часть представим в виде суммы и заменим вектор «– »
на .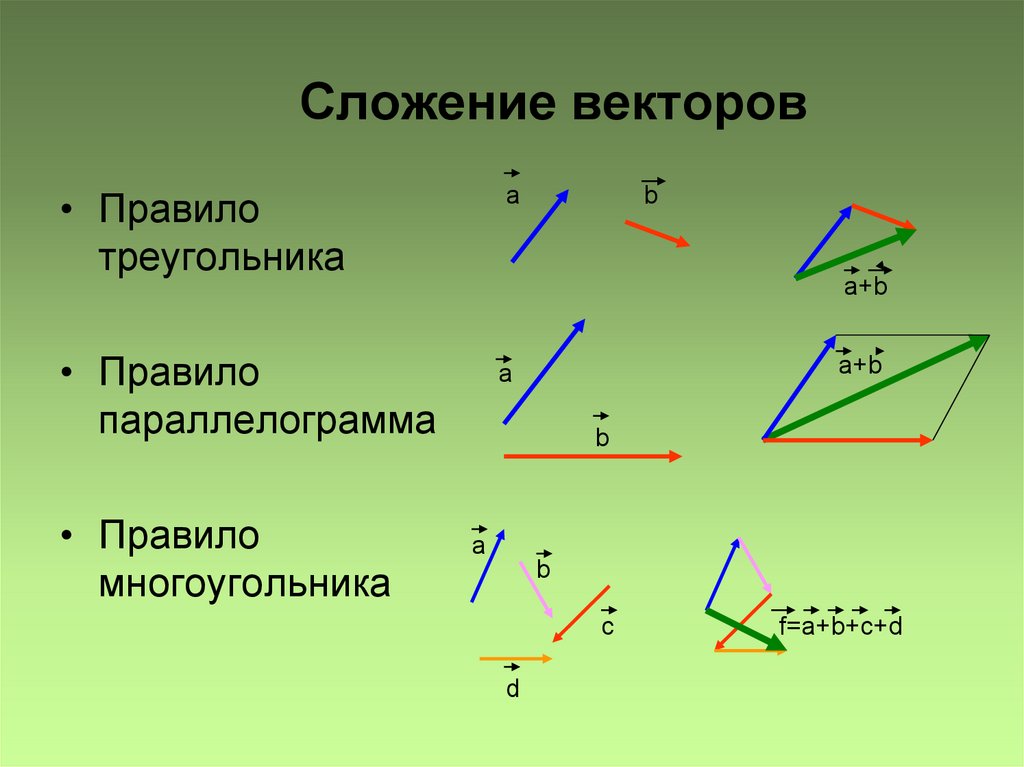
Изобразим данные векторы. Видим, что искомый вектор равен вектору .
Подведём итоги урока.
Сегодня мы сформулировали правило многоугольника сложения нескольких векторов в пространстве. И нашли его отличие от того же правила на плоскости.
Оно заключается в том, что полученный многоугольник может являться пространственным, то есть не все его вершины лежат в одной плоскости.
Также мы сформулировали правило многоугольника для произвольных точек пространства А1, А2 …, Аn.
Сумма векторов + ,+ = ,.
И если начало первого вектора совпадает с концом последнего, то сумма данных векторов равна .
Эти знания мы смогли применить при выполнении заданий.
Краткий курс высшей математики
Краткий курс высшей математики
ОглавлениеПРЕДИСЛОВИЕГЛАВА I. МЕТОД КООРДИНАТ. ПОНЯТИЕ ФУНКЦИИ § 1. ДЕЙСТВИТЕЛЬНЫЕ ЧИСЛА. КООРДИНАТЫ ТОЧКИ НА ПРЯМОЙ 2. Геометрическое изображение действительных чисел. Координаты точки на прямой 3. Абсолютная величина действительного числа 4. Расстояние между двумя точками на прямой § 2. КООРДИНАТЫ НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕ 2. Расстояние между двумя точками на плоскости 3. Деление отрезка в данном отношении 4. Координаты точки в пространстве 5. Расстояние между двумя точками в пространстве § 3. 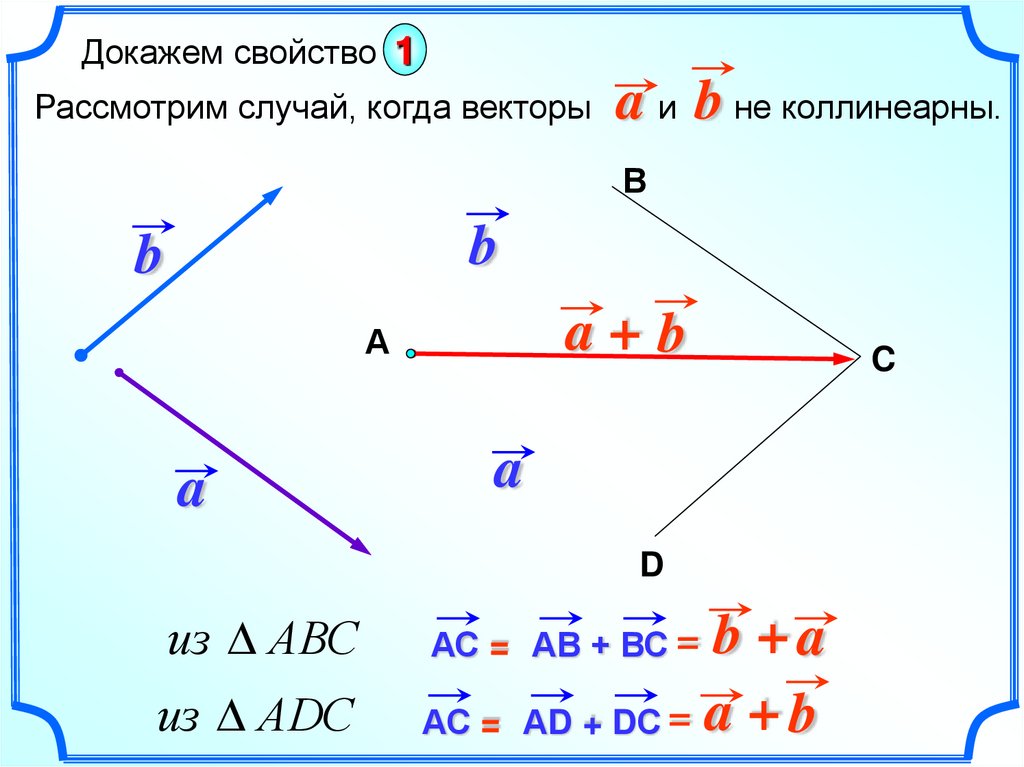 УГОЛ МЕЖДУ ДВУМЯ ОСЯМИ. ПОЛЯРНЫЕ КООРДИНАТЫ УГОЛ МЕЖДУ ДВУМЯ ОСЯМИ. ПОЛЯРНЫЕ КООРДИНАТЫ2. Полярные координаты 3. Зависимость между декартовыми и полярными координатами § 4. ФУНКЦИОНАЛЬНАЯ ЗАВИСИМОСТЬ 2. Понятие функции 3. График функции 4. Способы задания функций 5. Основные элементарные функции и их графики 6. Сложные функции. Элементарные функции 7. Целые и дробно-рациональные функции 8. Функции четные и нечетные. Периодические функции § 5. УРАВНЕНИЕ ЛИНИИ 2. Нахождение уравнения линии по ее геометрическим свойствам § 6 ПРЕОБРАЗОВАНИЕ КООРДИНАТ 2. Поворот осей координат ГЛАВА II. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ НА ПЛОСКОСТИ § 1. ПРЯМАЯ 2. Уравнение прямой с угловым коэффициентом 3. Уравнение прямой, параллельной оси ординат 4. Общее уравнение прямой и его частные случаи 5. Точка пересечения прямых. Построение прямой по ее уравнению 7. Уравнение прямой, проходящей через данную точку в заданном направлении 8. 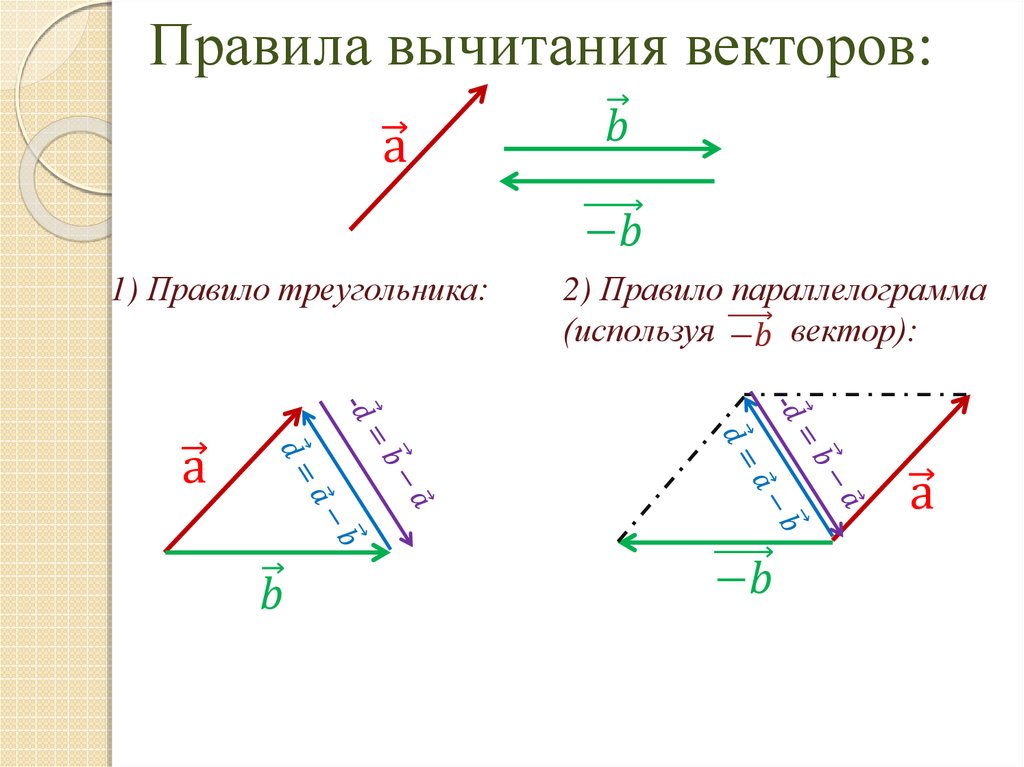 Пучок прямых Пучок прямых9. Уравнение прямой, проходящей через две данные точки 10. Расстояние от точки до прямой § 2. КРИВЫЕ ВТОРОГО ПОРЯДКА 2. Окружность 3. Эллипс 4. Гипербола 5. Парабола 6. Окружность, эллипс, гипербола и парабола как конические сечения 7. Упрощение уравнения кривой второго порядка. График квадратного трехчлена 8. Уравнение равносторонней гиперболы, асимптоты которой приняты за оси координат 9. График дробно-линейной функции 10. Преобразование уравнения кривой второго порядка, не содержащего члена с произведением координат ГЛАВА III. ЭЛЕМЕНТЫ ЛИНЕЙНОЙ И ВЕКТОРНОЙ АЛГЕБРЫ § 1. ЭЛЕМЕНТЫ ТЕОРИИ ОПРЕДЕЛИТЕЛЕЙ 2. Определитель третьего порядка 3. Понятие об определителях высших порядков § 2. СИСТЕМЫ УРАВНЕНИЙ ПЕРВОЙ СТЕПЕНИ 2. Однородная система двух уравнений первой степени с тремя неизвестными 3. Система трех уравнений первой степени с тремя неизвестными 4. Однородная система трех уравнений первой степени с тремя неизвестными § 3. 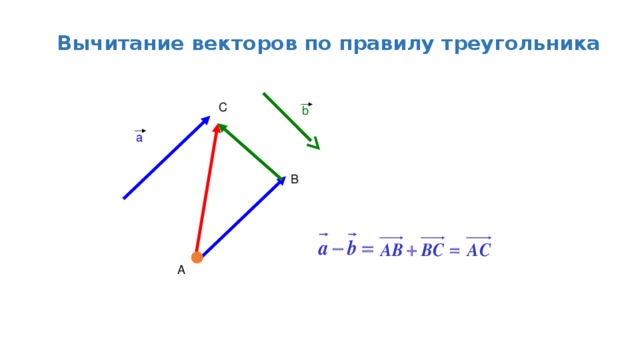 ЭЛЕМЕНТЫ ВЕКТОРНОЙ АЛГЕБРЫ ЭЛЕМЕНТЫ ВЕКТОРНОЙ АЛГЕБРЫ2. Линейные операции над векторами 4. Проекция вектора на ось и составляются вектора по оси 5. Разложение вектора на составляющие по осям координат 6. Направляющие косинусы вектора 7. Условие коллинеарности двух векторов 8. Скалярное произведение 9. Выражение скалярного произведения через проекции перемножаемых векторов 10. Косинус угла между двумя векторами 11. Векторное произведение 12. Выражение векторного произведения через проекции перемножаемых векторов 14. Геометрический смысл смешанного произведения 15. Условие компланарности трех векторов § 4. МАТРИЦЫ И ДЕЙСТВИЯ НАД НИМИ 2. Равенство матриц. Действия над матрицами 3. Обратная матрица 4. Матричная запись и матричное решение системы уравнений первой степени § 5. ЛИНЕЙНЫЕ ОТОБРАЖЕНИЯ 2. Преобразование координат 3. Приведение квадратичной формы к каноническому виду 4. Упрощение общего уравнения кривой второго порядка ГЛАВА IV. 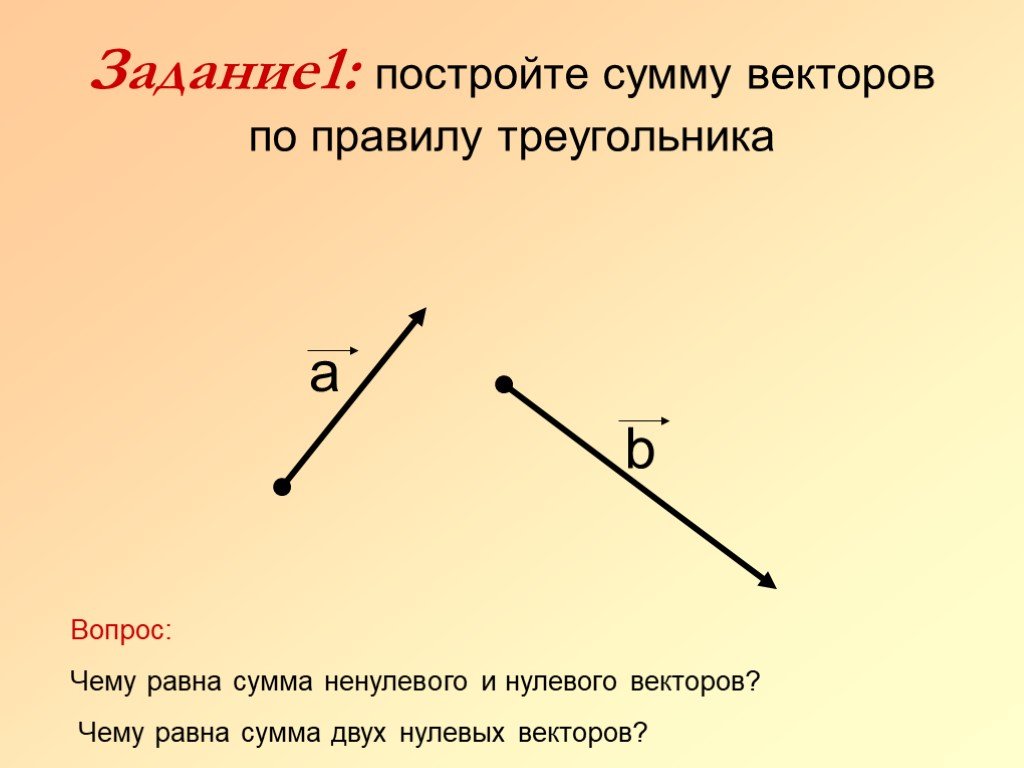 АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ§ 1. ПЛОСКОСТЬ 2. Нормальный вектор плоскости. Уравнение плоскости, проходящей через данную точку 3. Общее уравнение плоскости и его частные случаи 4. Построение плоскости по ее уравнению 5. Угол между плоскостями. Условия параллельности и перпендикулярности двух плоскостей 6. Точка пересечения трех плоскостей § 2. ПРЯМАЯ В ПРОСТРАНСТВЕ 2. Общие уравнения прямой 3. Векторное уравнение прямой. Параметрические уравнения прямой 4. Канонические уравнения прямой 5. Уравнения прямой, проходящей через две точки 6. Угол между двумя прямыми. Условия параллельности и перпендикулярности прямых § 3. Прямая и плоскость в пространстве 2. Точка пересечения прямой с плоскостью 3. Расстояние от точки до плоскости 4. Пучок плоскостей § 4. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА 2. Цилиндрические поверхности 3. Конические поверхности 4. Поверхность вращения 6. Гиперболоиды 7. Параболоиды ГЛАВА V.  ТЕОРИЯ ПРЕДЕЛОВ ТЕОРИЯ ПРЕДЕЛОВ§ 1. ПРЕДЕЛ ФУНКЦИИ 2. Предел функции при х -> -оо 3. Предел функции при х->х0 4. Бесконечно малые функции. Ограниченные функции 5. Бесконечно большие функции и их связь с бесконечно малыми функциями 6. Основные теоремы о пределах 7. Предел функции при x -> 0 8. Последовательность. Число e 9. Натуральные логарифмы 10. Сравнение бесконечно малых функций § 2. НЕПРЕРЫВНЫЕ ФУНКЦИИ 2. Операции над непрерывными функциями. Непрерывность элементарных функций 3. Свойства функций, непрерывных на сегменте 4. Понятие об обратной функции 5. Обратные тригонометрические функции 6. Показательная и логарифмическая функции 7. Понятие о гиперболических функциях ГЛАВА VI. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ ФУНКЦИЙ ОДНОЙ ПЕРЕМЕННОЙ 1. Приращение аргумента и приращение функции 2. Определение непрерывности функции с помощью понятии приращения аргумента и приращения функции 3. Задачи, приводящие к понятию производной 4. 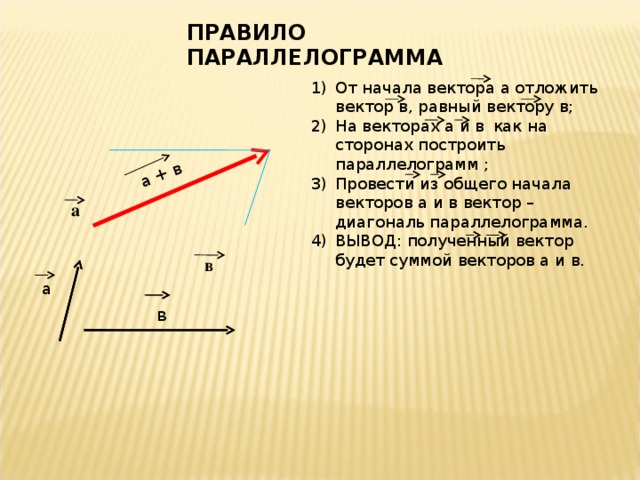 Определение производной и ее механический смысл Определение производной и ее механический смысл5. Дифференцируемость функции 6. Геометрический смысл производной 7. Производные некоторых основных элементарных функций 8. Основные правила дифференцирования 9. Производная обратной функции 10. Производные обратных тригонометрических функций 11. Производная сложной функции § 12. Производные гиперболических функций 13. Производная степенной функции с любым показателем 14. Сводная таблица формул дифференцирования 15. Неявные функции и их дифференцирование 16. Уравнения касательной а нормали к кривой 17. Графическое дифференцирование § 2. ПРОИЗВОДНЫЕ ВЫСШИХ ПОРЯДКОВ 1. Нахождение производных высших порядков 2. Механический смысл второй производной § 3. ДИФФЕРЕНЦИАЛ ФУНКЦИИ 2. Производная как отношение дифференциалов 3. Дифференциал суммы, произведения и частного функций 4. Дифференциал сложной функции. Инвариантность формы дифференциала 5. Применение дифференциала к приближенным вычислениям 6.  Дифференциалы высших порядков Дифференциалы высших порядков§ 4. ФУНКЦИИ, ЗАДАННЫЕ ПАРАМЕТРИЧЕСКИ, И ИХ ДИФФЕРЕНЦИРОВАНИЕ 2. Дифференцирование функций, заданных параметрически § 5. ВЕКТОРНАЯ ФУНКЦИЯ СКАЛЯРНОГО АРГУМЕНТА 2. Векторная функция скалярного аргумента и ее производная 3. Уравнения касательной прямой и нормальной плоскости к пространственной кривой 4. Механический смысл первой и второй производных векторной функции скалярного аргумента § 6. НЕКОТОРЫЕ ТЕОРЕМЫ О ДИФФЕРЕНЦИРУЕМЫХ ФУНКЦИЯХ 2. Теорема Ролля 3. Теорема Лагранжа 4. Правило Лопиталя § 7. ПРИЛОЖЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИЙ И ПОСТРОЕНИЮ ГРАФИКОВ 2. Максимум и минимум функции 3. Достаточный признак существования экстремума, основанный на знаке второй производной 4. Отыскание наибольшего и наименьшего значений функции 5. Применение теории максимума и минимума к решению задач 6. Выпуклость и вогнутость графика функции. Точки перегиба 7. Асимптоты графика функции 8. Общая схема исследования функции и построение ее графика § 8. 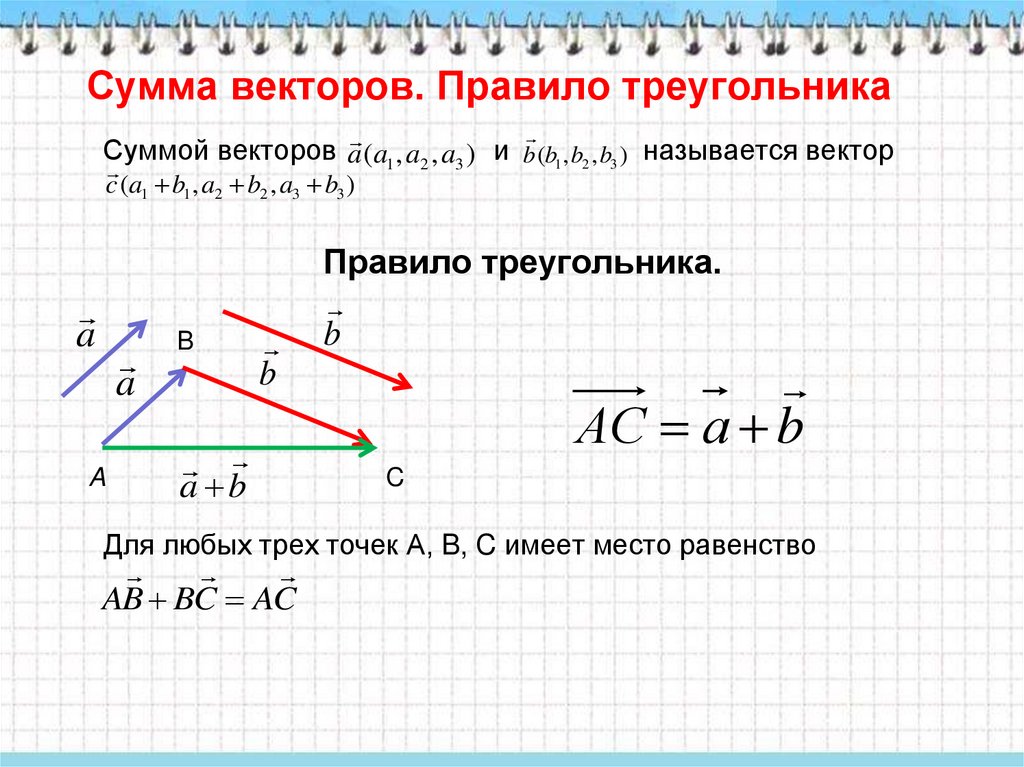 ПРИБЛИЖЕННОЕ РЕШЕНИЕ УРАВНЕНИЙ ПРИБЛИЖЕННОЕ РЕШЕНИЕ УРАВНЕНИЙ2. Уточнение найденных значений корней методом хорд и касательных § 9. ИНТЕРПОЛЯЦИОННАЯ ФОРМУЛА ЛАГРАНЖА ГЛАВА VII. НЕОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ § 1. НЕОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ И ЕГО СВОЙСТВА 2. Геометрический смысл неопределенного интеграла 3. Таблица основных интегралов 4. Основные свойства неопределенного интеграла § 2. ОСНОВНЫЕ МЕТОДЫ ИНТЕГРИРОВАНИЯ 2. Интегрирование методом замены переменной 3. Интегрирование по частям § 3. ИНТЕГРИРОВАНИЕ РАЦИОНАЛЬНЫХ ФУНКЦИЙ 2. Рациональные дроби. Выделение правильной рациональной дроби 3. Интегрирование простейших рациональных дробей 4. Разложение правильной рациональной дроби на простейшие дроби 5. Метод неопределенных коэффициентов 6. Интегрирование рациональных дробей § 4. Интегрирование тригонометрических функций 2. Рациональные функции двух переменных 3. Интегралы вида § 5. ИНТЕГРИРОВАНИЕ НЕКОТОРЫХ ИРРАЦИОНАЛЬНЫХ ФУНКЦИЙ 2. Интеграл вида 3. 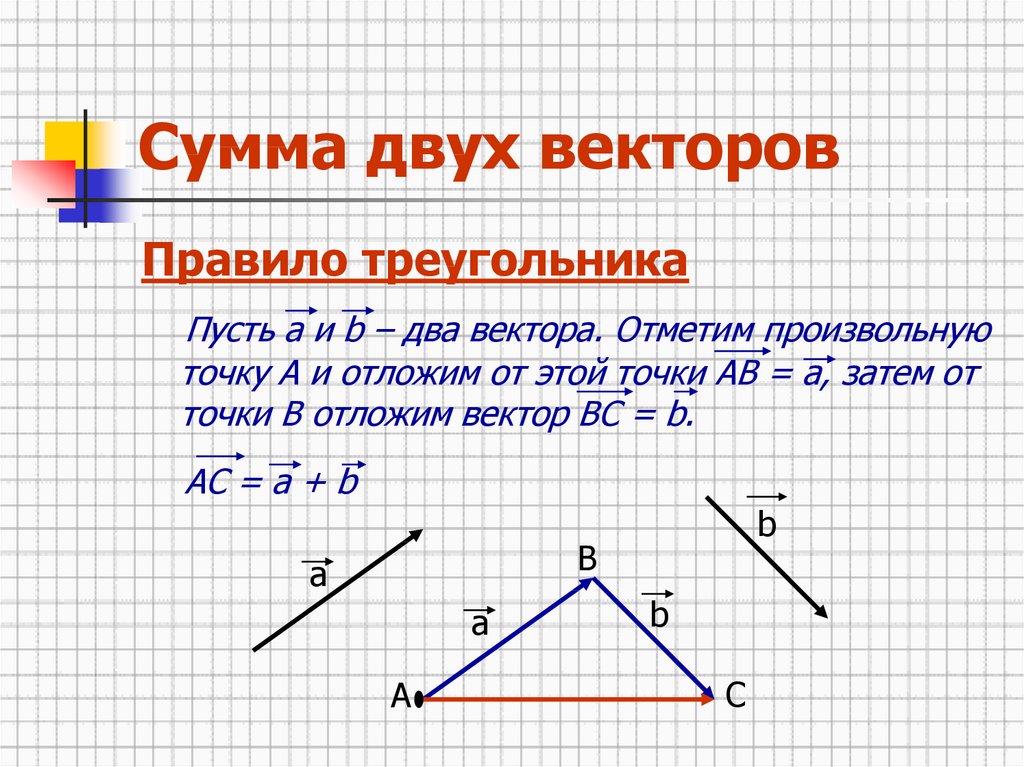 Интегралы видов Интегралы видов4. Интегралы вида § 6. ОБЩИЕ ЗАМЕЧАНИЯ О МЕТОДАХ ИНТЕГРИРОВАНИЯ. ИНТЕГРАЛЫ, НЕ БЕРУЩИЕСЯ В ЭЛЕМЕНТАРНЫХ ФУНКЦИЯХ 2. Понятие об интегралах, не берущихся в элементарных функциях ГЛАВА VIII. ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ § 1. ЗАДАЧИ, ПРИВОДЯЩИЕ К ОПРЕДЕЛЕННОМУ ИНТЕГРАЛУ 2. Задача о работе переменной силы § 2. ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ 2. Свойства определенного интеграла 3. Производная интеграла по переменной верхней границе 4. Формула Ньютона—Лейбница 5. Замена переменной в определенном интеграле 6. Интегрирование по частям в определенном интеграле § 3. ГЕОМЕТРИЧЕСКИЕ И ФИЗИЧЕСКИЕ ПРИЛОЖЕНИЯ ОПРЕДЕЛЕННОГО ИНТЕГРАЛА 2. Вычисление площади в полярных координатах 3. Вычисление объема тела по известным поперечным сечениям 4. Объем тела вращения 5. Длина дуги кривой 6. Дифференциал дуги 7. Площадь поверхности вращения 8. Общие замечания о решении задач методом интегральных сумм § 4. КРИВИЗНА ПЛОСКОЙ КРИВОЙ 2. 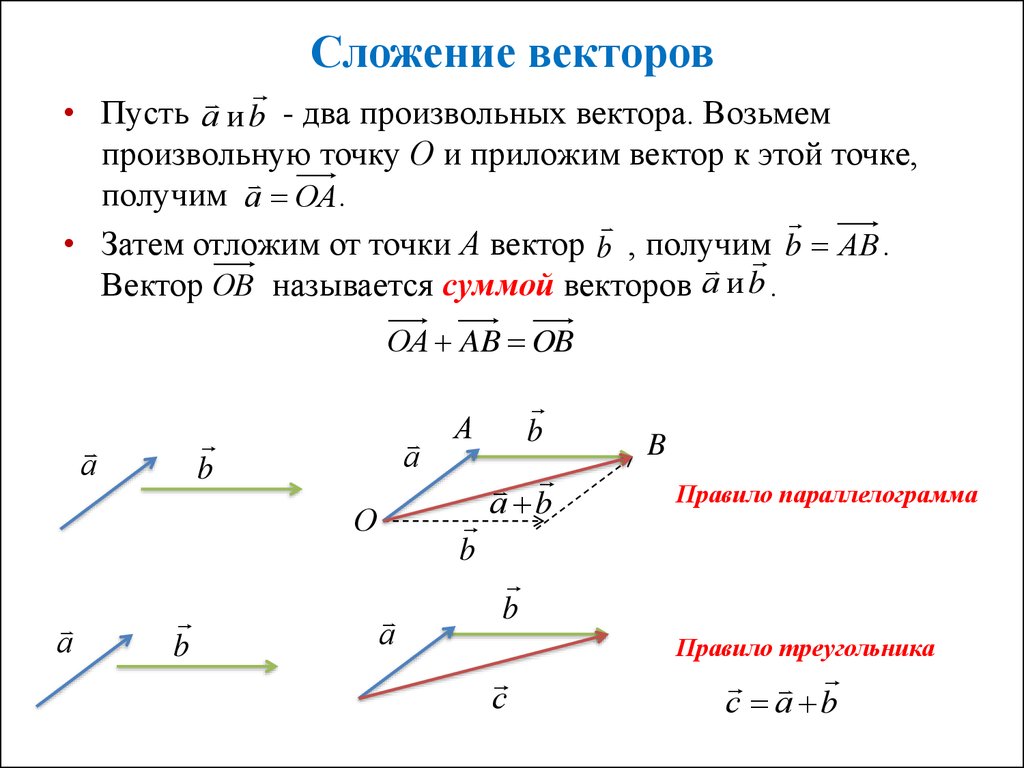 Вычисление кривизны Вычисление кривизны3. Радиус кривизны. Круг кривизны. Центр кривизны 4. Эволюта и эвольвента § 5. НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ 2. Интегралы от разрывных функций 3. Признаки сходимости несобственных интегралов § 6. ПРИБЛИЖЕННЫЕ МЕТОДЫ ВЫЧИСЛЕНИЯ ОПРЕДЕЛЕННЫХ ИНТЕГРАЛОВ 2. Метод трапеций 3. Метод параболических трапеций (метод Симпсона) ГЛАВА IX. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ ФУНКЦИЙ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ § 1. ФУНКЦИИ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ 2. График функции двух переменных 3. Функции трех и большего числа переменных § 2. Предел функции нескольких переменных. Непрерывность функции. Точки разрыва 2. Непрерывность функции нескольких переменных 3. Понятие области 4. Точки разрыва 5. Свойства функций, непрерывных в ограниченной замкнутой области § 3. ЧАСТНЫЕ ПРОИЗВОДНЫЕ 2. Геометрический смысл частных производных функции двух переменных 3. Частные производные высших порядков § 4. ПОЛНЫЙ ДИФФЕРЕНЦИАЛ ФУНКЦИИ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ 2.  Полный дифференциал функции Полный дифференциал функции3. Приложение полного дифференциала к приближенным вычислениям § 5. Дифференцирование сложных и неявных функций 2. Инвариантность формы полного дифференциала 3. Дифференцирование неявных функций § 6. СКАЛЯРНОЕ ПОЛЕ 2. Производная по направлению 3. Градиент 4. Касательная плоскость а нормаль к поверхности 5. Геометрический смысл полного дифференциала функции двух переменных § 7. ЭКСТРЕМУМ ФУНКЦИЙ ДВУХ ПЕРЕМЕННЫХ 2. Наибольшее и наименьшее значения функции двух переменных ГЛАВА X. КРАТНЫЕ И КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ § 1. ДВОЙНОЙ ИНТЕГРАЛ 2. Двойной интеграл. Теорема существования 3. Свойства двойного интеграла 4. Вычисление двойного интеграла в декартовых координатах 5. Вычисление двойного интеграла в полярных координатах 6. Приложения двойного интеграла § 2. ТРОЙНОЙ ИНТЕГРАЛ 2. Тройной интеграл и его свойства 3. Вычисление тройного интеграла в декартовых координатах 4. Вычисление тройного интеграла в цилиндрических координатах 5. 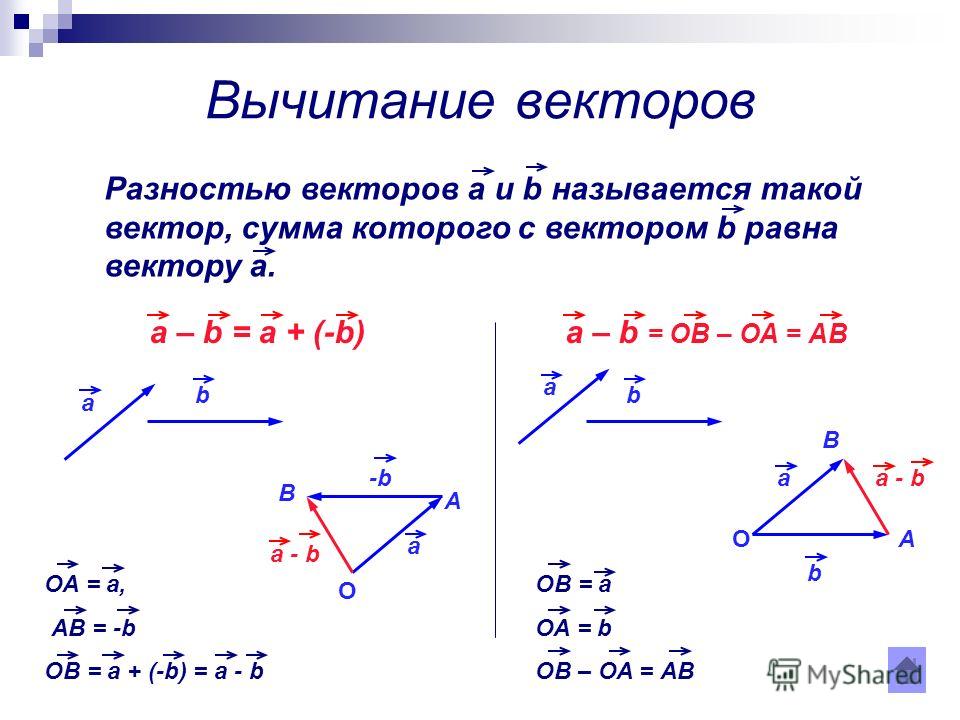 Приложения тройного интеграла Приложения тройного интеграла§ 3. КРИВОЛИНЕЙНЫЙ ИНТЕГРАЛ 2. Задача о работе. Криволинейный интеграл 3. Вычисление криволинейного интеграла 4. Формула Остроградского — Грина 5. Независимость криволинейного интеграла от пути интегрирования 6. Отыскание первообразной по полному дифференциалу 7. Криволинейный интеграл по длине дуги ГЛАВА XI. РЯДЫ § 1. ЧИСЛОВЫЕ РЯДЫ 2. Геометрическая прогрессия 3. Простейшие свойства числовых рядов 4. Необходимый признак сходимости ряда 5. Достаточные признаки сходимости знакоположительных рядов 6. Знакопеременные ряды 7. Остаток ряда и его оценка § 2. ФУНКЦИОНАЛЬНЫЕ РЯДЫ 2. Правильно сходящиеся функциональные ряды и их свойства § 3. СТЕПЕННЫЕ РЯДЫ 2. Свойства степенных рядов 3. Ряды по степеням разности х-а 4. Разложение функций в степенные ряды. Ряд Тейлора 5. Разложение некоторых элементарных функций в ряды Тейлора и Маклорена § 4. ПРИЛОЖЕНИЕ РЯДОВ К ПРИБЛИЖЕННЫМ ВЫЧИСЛЕНИЯМ 2.  Приближенное вычисление интегралов Приближенное вычисление интегралов§ 5. ПОНЯТИЕ О ФУНКЦИИ КОМПЛЕКСНОЙ ПЕРЕМЕННОЙ. СТЕПЕННЫЕ РЯДЫ В КОМПЛЕКСНОЙ ОБЛАСТИ 2. Числовые ряды с комплексными членами 3. Степенные ряды в комплексной области § 6. РЯДЫ ФУРЬЕ 2. Ряд Фурье 3. Сходимость ряда Фурье 4. Ряды Фурье для четных и нечетных функций 5. Разложение в ряд Фурье функций с периодом 2l ГЛАВА XII. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ § 1. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПЕРВОГО ПОРЯДКА 2. Дифференциальные уравнения первого порядка 3. Уравнения с разделяющимися переменными 4. Однородные уравнения 5. Линейные уравнения 6. Уравнение в полных дифференциалах 7. Особые решения 8. Приближенное решение дифференциальных уравнений первого порядка методом Эйлера § 2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 2. Простейшие уравнения второго порядка, допускающие понижение порядка 3. Понятие о дифференциальных уравнениях высших порядков § 3. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 2.  Линейные однородные дифференциальные уравнения второго порядка Линейные однородные дифференциальные уравнения второго порядка3. Линейные неоднородные дифференциальные уравнения второго порядка 4. Метод вариации произвольных постоянных § 4. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ 2. Линейные неоднородные дифференциальные уравнения второго порядка с постоянными коэффициентами 3. Приложение линейных дифференциальных уравнений второго порядка к изучению механических и электрических колебаний § 5. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВЫСШИХ ПОРЯДКОВ 2. Линейные дифференциальные уравнения n-го порядка с постоянными коэффициентами § 6. ИНТЕГРИРОВАНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ С ПОМОЩЬЮ РЯДОВ § 7. ПОНЯТИЕ О СИСТЕМАХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 2. Системы линейных дифференциальных уравнений с постоянными коэффициентами ПРИЛОЖЕНИЕ 1. ИНТЕРПОЛЯЦИОННАЯ ФОРМУЛА НЬЮТОНА ПРИЛОЖЕНИЕ 2. МЕТОД НАИМЕНЬШИХ КВАДРАТОВ |
Математика и наука были изобретены людьми для описания и
понимать окружающий мир. На этом слайде мы описываем метод сложения двух векторов.
Сложение векторов — это один из аспектов большой векторной алгебры, которую мы изучаем. , а не будет представлен на этом сайте. Добавление вектора представлено
здесь, потому что это встречается довольно часто при изучении движения
и потому что он демонстрирует некоторые фундаментальные различия между
векторы и скаляры. Векторы обычно обозначаются на рисунках стрелкой. Длина стрелки указывает величину и кончик стрелки указывает направление. Вектор помечены буквой в алфавитном порядке буква с линией сверху, чтобы отличить ее от скаляра. Величину вектора будем обозначать символом |а| . Направление будет измеряться углом фи относительно координаты ось х . Ось координат y перпендикулярна х . Примечание: Оси координат x и y сами по себе векторы! Они имеют величину и направление. Ты первый столкнуться с осями координат, когда вы учитесь строить графики. Так что у тебя есть использовал векторы в течение некоторого времени, даже не подозревая об этом! Если мы построим пунктирную линию от кончика вектора a идущий параллельно оси х, он пересекает ось у в том месте, где мы
этикетка или . Точно так же линия от кончика вектора
параллельно оси y пересекает ось x в точке x . Чтобы добавить два вектора, а и б , мы сначала разбиваем каждый вектор на его компоненты, x и a , и bx и по , как показано на рисунке. Из правил, регулирующих равенство векторов, синий вектор b равен черному вектору b потому что он имеет одинаковую равную длину и одинаковое направление. Теперь, поскольку компоненты вектора и вектор b скаляры, мы можем добавить x-компоненты для генерации x-компонент нового вектора c : сх = топор + Ьх Точно так же мы можем добавить y-компонентов : су = ау + по Новые компоненты cx и cy полностью определяют
новый вектор c , указав как величину, так и направление.
Внимательно взглянув на диаграмму, мы видим, что сложение двух векторов дает
новый вектор, равный , а не в направлении любого из
исходные векторы, величина которых равна , а не и равна сумме
величин исходных векторов. Примечание: На этом слайде для простоты мы разработали компоненты только в двух измерениях; имеются две оси координат. В действительности существуют три пространственных измерения и три компонента мира. все силы. Это важно для нашего вывода общие уравнения с движением для траекторий полета и для Навье-Стокса и уравнения Эйлера, которые описать силы и результирующее движение жидкостей в двигателе. Мы можем разбить очень сложные трехмерные векторные задачи на всего три скалярных уравнения. Виды деятельности: Экскурсии с гидом Навигация ..
|
 Заметим, что существуют некоторые величины и процессы в
наш мир, которые зависят от направления , в котором
они происходят, и есть некоторые величины, которые не зависят
по направлению.
Математики и ученые называют количество
который зависит от направления a количество векторов . Количество
которая не зависит от направления, называется скалярной величиной .
А
векторное количество
имеет две характеристики: величина и направление . Когда
сравнение
две векторные величины одного и того же типа, вы должны сравнить обе
величина и направление.
Заметим, что существуют некоторые величины и процессы в
наш мир, которые зависят от направления , в котором
они происходят, и есть некоторые величины, которые не зависят
по направлению.
Математики и ученые называют количество
который зависит от направления a количество векторов . Количество
которая не зависит от направления, называется скалярной величиной .
А
векторное количество
имеет две характеристики: величина и направление . Когда
сравнение
две векторные величины одного и того же типа, вы должны сравнить обе
величина и направление.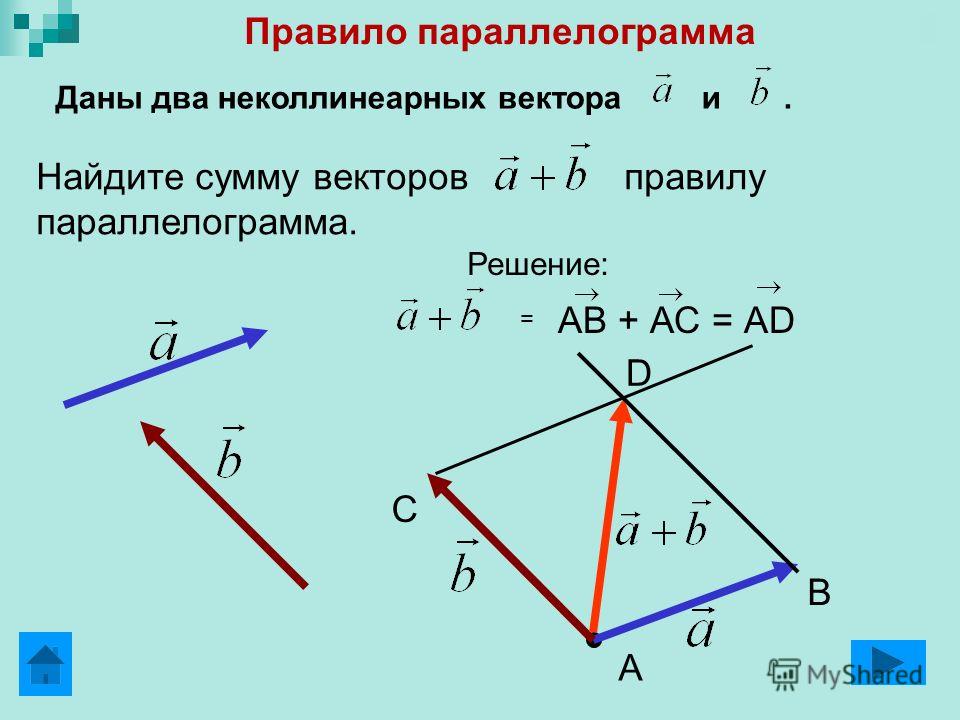
 Величины x и ay называются
составные части
вектора, и оба являются скалярными квантитами.
Величины x и ay называются
составные части
вектора, и оба являются скалярными квантитами.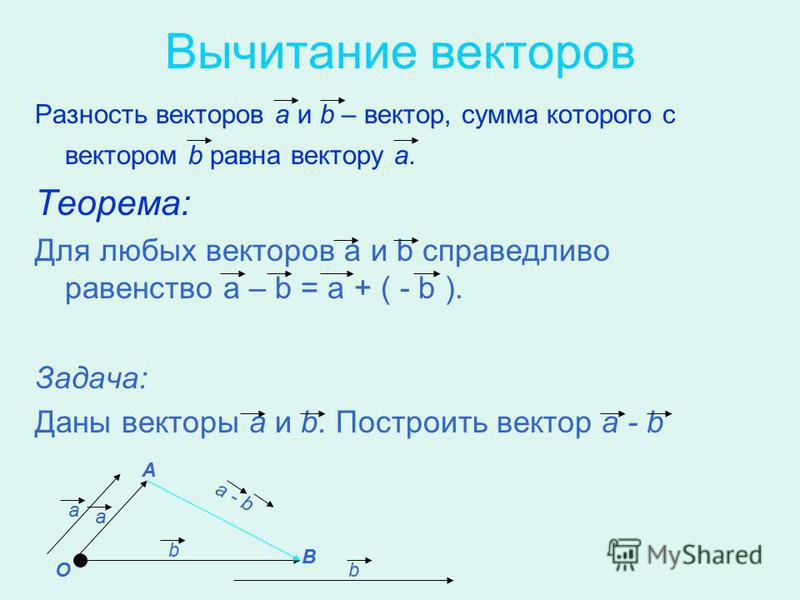 Векторная алгебра сильно отличается от скалярной алгебры, потому что она должна
учитывать как величину, так и направление.
Векторная алгебра сильно отличается от скалярной алгебры, потому что она должна
учитывать как величину, так и направление.Двумерные векторы и система координат
Q1: Розыгрыш
декартовой системе координат и обозначьте оси x и y.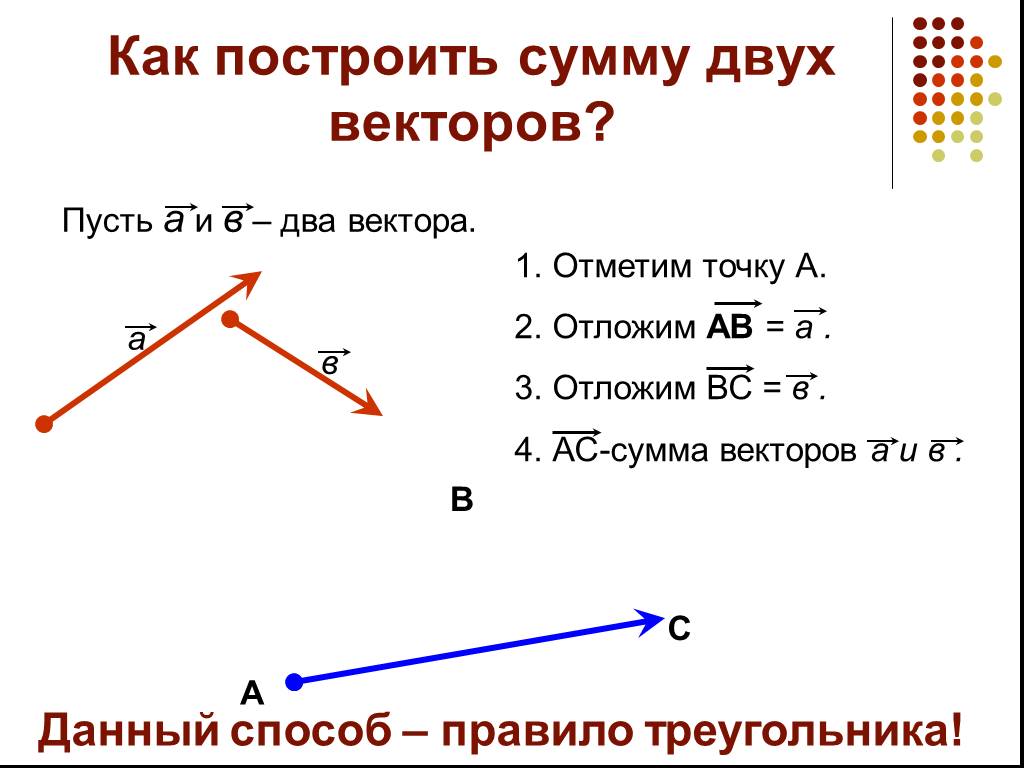 На ваше
системе координат нарисуйте следующие три вектора:
На ваше
системе координат нарисуйте следующие три вектора:
А=1х+2у
Б=-2х+2у
С= -2x+-3y
Q2: Идентифицировать и постройте три угла (a,b,c), чтобы описать направление каждого вектор.
Q3: Рассчитать величина и углы каждого вектора. Отметьте их на схеме.
А = 1x + 2y угол: Танк = 2/1 q = Желто-коричневый -1 2 q = 63° |
В = -2x + 2y угол: Танк = 2/-2 q = Желто-коричневый -1 -1 q = 45° |
С = -2x -3y угол: Танк = -3/-2 q = Тан -1 -1,5 q = 56° |
Q4: Банка
компонент x или y вектора когда-либо имеет большую величину, чем
сам вектор? Обоснуйте свой ответ своими словами.