4.3.5 Линейный оператор и его матрица
Определение. Пусть даны два пространства и . Если по закону каждому вектору поставлен в соответствие вектор , то говорят, что задан оператор (функция, отображение), отображающий в и пишут .
Обозначение: ; – образ, – прообраз.
Определение. Если для любых и из и любых вещественных чисел и имеет место , то оператор называется линейным.
Произвольные отображения линейных пространств изучаются в курсе математического анализа. В курсе линейной алгебры изучаются лишь линейные отображения.
Пример 6. Оператор действует из в по закону , где , и – фиксированный вектор, например, . Оператор переводит вектор из в другой вектор из . Докажем, что он линейный: . Здесь воспользовались свойствами векторного произведения.
Пример 7. Линеен ли оператор , где произвольный вектор, а вектор – фиксированный?
Решение. , так как , . Следовательно, оператор – нелинейный.
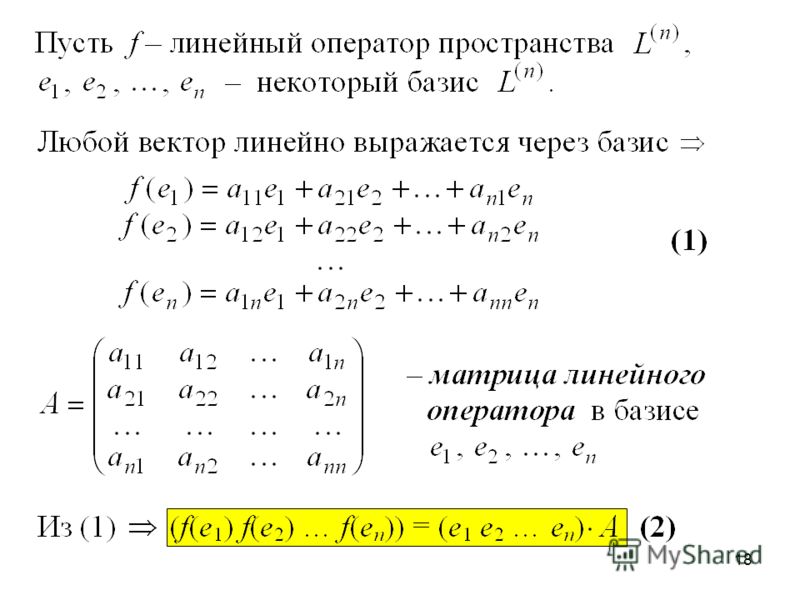
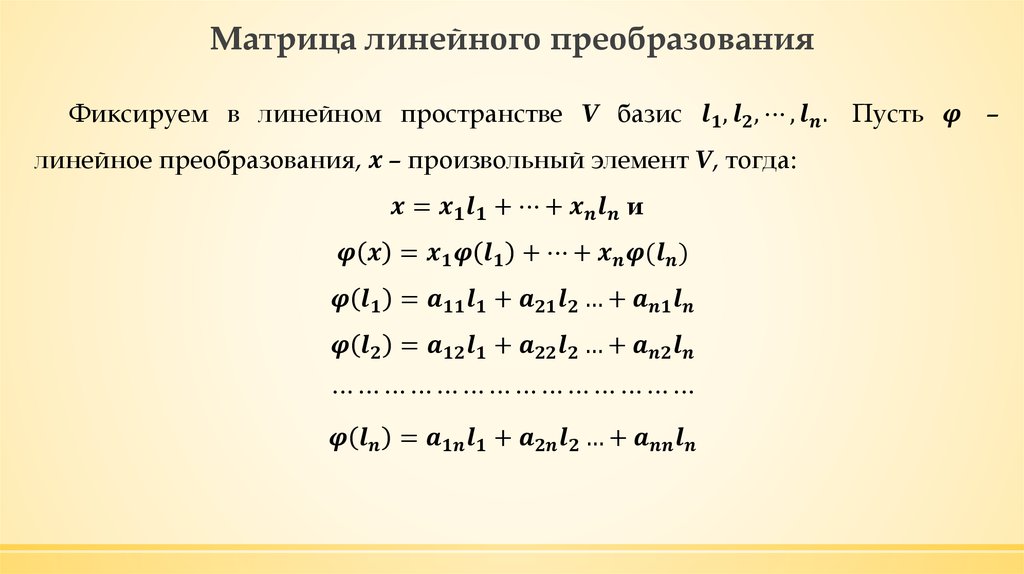
Пусть даны два пространства и и оператор , действующий из в . Пусть в есть базис , а в – базис .
Подействовав оператором на базисные векторы пространства , получим векторы из , которые можно разложить по базису с коэффициентами линейных комбинаций :
Строим матрицу таким образом, чтобы в ее столбцах стояли координаты образов базисных векторов пространства относительно базисных векторов пространства :
.
Матрица называется матрицей линейного оператора , действующего из в . Таким образом, если оператор , то матрица этого оператора имеет размер , то есть у нее строк и столбцов.
Замечание. Если в и выбрать другие базисы, то в этих базисах матрица линейного оператора будет иметь другой вид.
Из определения матрицы линейного оператора следует, что, зная закон (оператор), по которому вектору сопоставляется вектор , можно построить матрицу, и наоборот, любой матрице соответствует некоторый линейный оператор.
Пример 8. Построить матрицу линейного оператора, действующего из в по закону , где векторы и заданы относительно канонического базиса.
Построить матрицу линейного оператора, действующего из в по закону , где векторы и заданы относительно канонического базиса.
Решение. Подействуем оператором на базисные векторы :
;
;
.
Таким, образом, – искомая матрица.
Пример 9. Пусть в выбран базис , , , а в выбран базис , . Найти матрицу линейного оператора, действующего из в по закону , где .
Решение. ; ;
; .
Пример 10. Дана матрица . Найти линейный оператор (закон, по которому действует оператор).
Решение. Матрица – это матрица линейного оператора, действующего из в . Пусть в базис , в базис . Так как в столбцах матрицы стоят координаты векторов относительно базиса , то
(1)
Пусть произвольный вектор из , где – координаты этого вектора в базисе , тогда . Действуя оператором на вектор и учитывая линейность оператора, получим: .
Учитывая (1), имеем:
.
Таким образом, оператор действует по закону
.
Зная матрицу оператора , результат его действия на вектор можно найти в матричной форме. Пусть известна матрица оператора размера с элементами . В этом случае оператор с такой матрицей действует из в . Если – любой вектор из , то результат действия оператора на вектор можно найти по формуле:
,
Где – координаты вектора .
Пример 11. Операторы и действуют в пространстве по законам , , где ; ( – скалярное произведение векторов и ). Найти координаты вектора в каноническом базисе.
Решение. Координаты вектора можно найти двумя способами:
А) найдем матрицу .
Строим матрицу в каноническом базисе:
; ;
.
.
Строим матрицу в каноническом базисе:
; ;
.
;
.
.
Этот способ решения называется матричным;
Б) операторный способ.
. Подействуем оператором на вектор :
, теперь на полученный вектор подействуем оператором :
.
Для самостоятельной работы.
1. Оператор действует по закону:
.
Найти его матрицу в каноническом базисе.
Ответ: .
2. Оператор действует в плоскости и осуществляет зеркальное отражение относительно прямой . Доказать, что он линейный и найти его матрицу в каноническом базисе.
Ответ: .
3. Дана матрица .
А) Найти оператор, матрицей которого является матрица .
Б) Найти образ вектора .
Ответ: .
| < Предыдущая | Следующая > |
|---|
Учебные материалы по математике | Определитель линейного оператора
Теорема 9
Если A – линейный оператор, и y=Ax , тогда столбец координат вектора y равен произведению матрицы A на столбец координат x. |
Доказатальство:
A=
Выберем произвольный вектор x x=x1b1+x2b2+…+xnbn ,
его образ y = Ax = A(x1b1+x2b2+…+xnbn) = x1Ab1+…+xnAbn
Ab1 — это 1-ый столбец матрицы A;
Ab1 — 2-ой столбец и т.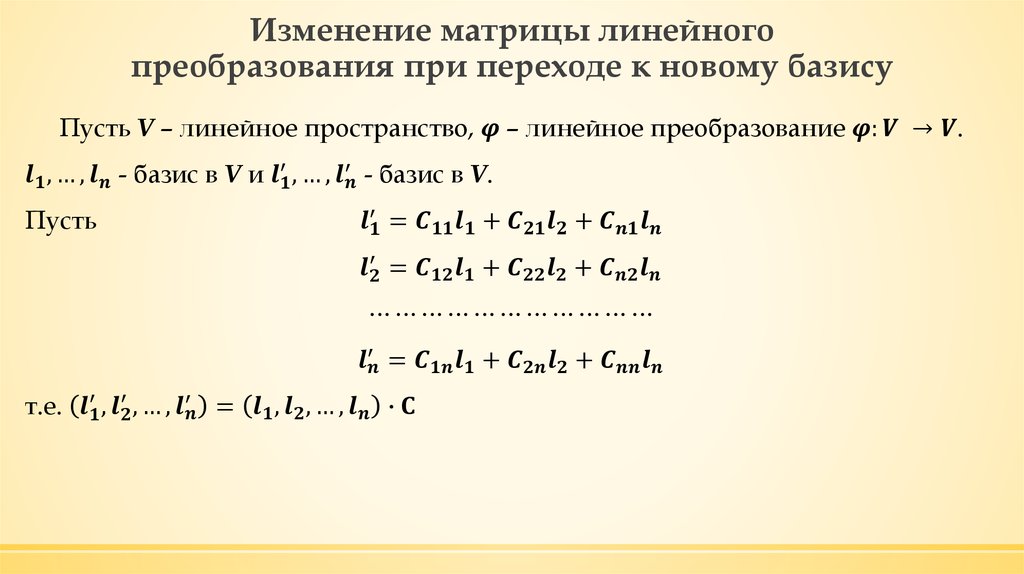 д.
д.
Столбец координат вектора Ax в базисе b имеет вид
Матрица оператора полностью его определяет. В то же время, какую бы мы ни взяли матрицу n´n, она будет матрицей некоторого линейного оператора в заданном базисе n-мерного линейного пространства.
Теорема 10
Матрицы Ab и Ae линейного оператора A: L®L, записанные в базисах b и e, связаны между собой соотношением Ae=U-1AbU, где U – матрица перехода от базиса b к базису e. |
Доказательство:
Пусть y=Ax. обозначим координаты векторов x и y в базисе b через xb и yb. Действие линейного оператора A в матричной форме имеет вид yb=Abxb,
xb=Uxe, yb=Uye,
ye=U-1yb=U-1(Abxb)=U-1(AbUxe)=(U-1AbU)xe
Запись 
Это можно записывать диаграммой
Ae
xe ® ye
U ¯ U-1
xb ® yb
Ab
Определителем линейного оператора называется определитель его матрицы. |
Теорема 11
Определитель линейного оператора не зависит от выбора базиса. |
Доказательство:
Ae=U-1AbUÞ det Ae=det (U—1AbU)=det U-1 det Ab detU=
(det U-1 det U) det Ab=det Ae
| Сумма диагональных элементов матрицы называется её следом. |
След матрицы линейного оператора не зависит от выбора базиса.
Произведением линейных операторов и называется их последовательное выполнение (композиция): |
Произведение линейных операторов, очевидно, является линейным оператором.
Теорема 12
Матрицей линейного оператора BA является матрица BA. (Матрицей произведения линейных операторов является произведение их матриц). |
Доказательство:
(BA)x=B(Ax)=B(bAx)=b(B(Ax))=b(BA)x
Сложение двух линейных операторов, действующих в |
Матрицей произведения линейного оператора на скаляр очевидно является матрица, полученная умножением матрицы исходного оператора на этот скаляр. Матрицей суммы линейных операторов является сумма их матриц.
Поскольку для линейных операторов, действующих в L, определено сложение и умножение на скаляр, то они образуют линейное пространство L (L). Проверьте действие аксиом линейного пространства: ассоциативность и коммутативность сложения, существования нейтрального элемента и существование обратных элементов, закон дистрибутивности.
Проверьте действие аксиом линейного пространства: ассоциативность и коммутативность сложения, существования нейтрального элемента и существование обратных элементов, закон дистрибутивности.
Собственные значения и
собственные векторы линейного оператора.
Характеристическим многочленом линейного оператора A: L®L называется CA(l)=det(A-lE), А характеристическим уравнением CA(l)=0 |
Определение корректно, так как определитель не зависит от выбора базиса
det(A-lE)==
Коэффициенты dk инвариантны относительно выбора базиса, Þ они отражают свойства оператора, а не его матрицы.
Некоторые наиболее легко выражаемые коэффициенты:
d0=det A, dn=1, dn-1=trA
Ненулевой вектор x в линейном пространстве L называется собственным вектором линейного оператора A: L®L, если для некоторого действительного числа l выполняется соотношение Ax=lx. |
Множество всех собственных значений называется спектром оператора.
Теорема 12
Если x – собственный вектор оператора A, то ax – тоже его собственный вектор. |
Доказательство:
Ax=lx Þ A(ax )= aAx=alx=lax
Теорема 13
l – собственное значение линейного оператора Û оно является корнем его характеристического многочлена. |
Доказательство:
Пусть l – собственное значение линейного оператора A:L®L Û $x¹0, для которого Ax=lx. Используя тождественный оператор I (Ix=x), получим, Ax= lIx Û (A-lI)x=0
В некотором произвольном, но фиксированном базисе запишем матрицы A и E (соответствующие операторам A и I)
Û (A-lE)x=0, Это матричная запись однородной СЛАУ, которая имеет ненулевое решение – столбец координат собственного вектора x Û матрица A-lE имеет нулевой определитель det(A-lE)=0 Û l – корень характеристического многочлена.
Кратность собственного значения есть кратность соответствующего корня характеристического многочлена.
Заметим, что множество всех собственных векторов не является линейным пространством, так как по определению среди них нет нулевого, но если его добавить, то получится подпространство. Его называют собственным подпространством линейного оператора.
Вычисление собственных значений и собственных векторов.
1) Выбрать базис и построить матрицу оператора A.
2) Составить характеристическое уравнение и найти все его действительные корни, то есть собственные значения оператора A.
3) Для каждого собственного значения lk найти фундаментальную систему решений СЛАУ det(A-lkE)=0. Векторы фундаментальной системы и есть собственные векторы соответствующего lk.
Лекция 15
Теорема 14. О линейной независимости собственных векторов, соответствующих различным собственным значениям.
Система собственных векторов e1, e2,…, ek, соответствующих собственным значениям l1, l2,…, lk (попарно различным), является линейно независимой. НаташаАвтор Наташа — контент-маркетолог и блогер, но все это не мешает ей оставаться адекватным человеком. Верит во все цвета радуги и не верит в теорию всемирного заговора. Увлекается «нефрохиромантией» и тайно мечтает воссоздать дома Александрийскую библиотеку. Распродажа дипломныхСкидка 30% по промокоду Diplom2020 Подпишись на наш паблик в ВКПолучи промокод на скидку 20% Нужна работа?Контрольная работа у наших партнеров |
Это одна и та же точка, поэтому нам потребуется следующее условие. $$
х_{1} \mathbf{e}_{1} +
х_{2} \mathbf{e}_{2} +
х_{3} \mathbf{e}_{3}
«=»
у_{1} \mathbf{f}_{1} +
у_{2} \mathbf{f}_{2} +
у_{3} \mathbf{f}_{3}
$$
$$
х_{1} \mathbf{e}_{1} +
х_{2} \mathbf{e}_{2} +
х_{3} \mathbf{e}_{3}
«=»
у_{1} \mathbf{f}_{1} +
у_{2} \mathbf{f}_{2} +
у_{3} \mathbf{f}_{3}
$$
Вопрос дает способ записи $f$-базисных векторов через $e$-базисные векторы: $$ \begin{выровнено} \mathbf{f}_1 &= \mathbf{e}_1 + \mathbf{e}_2 \\ \mathbf{f}_2 &= \mathbf{e}_2 \\ \mathbf{f}_3 &= \mathbf{e}_1 — \mathbf{e}_3 \end{выровнено} $$
Мы можем подставить эти формулы в уравнение для координат выше
$$ х_{1} \mathbf{e}_{1} + х_{2} \mathbf{e}_{2} + х_{3} \mathbf{e}_{3} «=» y_{1} (\mathbf{e}_{1} + \mathbf{e}_{2}) + y_{2} \mathbf{e}_{2} + y_{3} (\mathbf{e}_{1} — \mathbf{e}_{3}) $$
$$ х_{1} \mathbf{e}_{1} + х_{2} \mathbf{e}_{2} + х_{3} \mathbf{e}_{3} «=» y_{1} \mathbf{e}_{1} + y_{1} \mathbf{e}_{2} + y_{2} \mathbf{e}_{2} + y_{3} \mathbf{e}_{1} — y_{3} \mathbf{e}_{3} $$
$$ х_{1} \mathbf{e}_{1} + х_{2} \mathbf{e}_{2} + х_{3} \mathbf{e}_{3} «=» (у_{1} + у_{3}) \mathbf{е}_{1} + (у_{1} + у_{2}) \mathbf{е}_{2} — y_{3} \mathbf{e}_{3} $$
Теперь $\mathbf{e}_1$, $\mathbf{e}_2$ и $\mathbf{e}_3$ — три линейно независимых вектора, так что компоненты каждого вектора можно приравнять по обе стороны от приведенного выше . т.е. мы можем написать:
т.е. мы можем написать:
$$ \begin{выровнено} х_1 &= у_1 + у_3 \\ х_2 & = у_1 + у_2 \\ х_3 &= -у_3 \end{выровнено} $$
Следующее точно такое же, как и выше, но с немного другим интервалом $$ \begin{выровнено} х_1 &= у_1 & &+у_3 \\ х_2 & = у_1 &+ у_2 & \\ x_3 &= & &-y_3 \end{выровнено} $$
Написав уравнения, связывающие координаты таким образом, мы можем увидеть, как набор можно записать в виде одного матричного уравнения:
$$ \begin{pmatrix} х_{1} \\ х_{2} \\ х_{3} \end{pматрица} «=» \begin{pmatrix} 1 и 0 и 1 \\ 1 и 1 и 0 \\ 0 и 0 и -1 \end{pматрица} \begin{pmatrix} у_{1} \\ у_{2} \\ у_{3} \end{pматрица} \Правая стрелка \mathbf{х} «=» \begin{pматрица} 1 и 0 и 1 \\ 1 и 1 и 0 \\ 0 и 0 и -1 \end{pматрица} \mathbf{y}$$
Это показывает, как мы можем использовать матрицу для преобразования координат в $f$-базисе в координаты в $e$-базисе, т. е. $\mathbf{x} = T \mathbf{y }$, т.е. представляет собой матрицу $T$ в формуле 9{-1} «=» \begin{pматрица} 1&-1&0 \\ 0& 1& 0 \\ 1&-1&-1 \end{pматрица} $$
и, наконец, мы можем вычислить $A’$
$$
А’
«=»
\begin{pматрица}
-3&-2&-2\\
3&3&-1\
-7 и -1 и -6
\end{pматрица}
$$
которая представляет собой матрицу преобразования, применяемого к координатам в $f$-базисе.
Следующая часть посвящена тому, как получается формула, связывающая две матрицы преобразования в разных основаниях.
Если мы напишем $\mathbf{u}$ для результата применения $A$ к $e$-базисному вектору $\mathbf{x}$, а если написать $\mathbf{v}$ за результат применения $A’$ к $f$-базисному вектору $\mathbf{y}$.
$$ \begin{выровнено} \mathbf{u} &= A \mathbf{x} \\ \mathbf{v} &= A’ \mathbf{y} \\ \end{выровнено} $$
Векторы $\mathbf{x}$ и $\mathbf{y}$ соответствуют одной и той же точке в двух разных основаниях, как и пара векторов $\mathbf{u}$ и $\mathbf{v}$. Другими словами, их можно записать: $$ \begin{выровнено} \mathbf{x} &= T \mathbf{y} \\ \mathbf{u} &= T \mathbf{v} \\ \end{выровнено} $$ 9{-1} A T = A’ $.
5.2: Матрица линейного преобразования I
- Последнее обновление
- Сохранить как PDF
- Идентификатор страницы
- 14525
- Кен Каттлер
- Университет Бригама Янга via Lyryx 9{2}\) где \[T\left[\begin{array}{r} 1 \\ 0 \\ 0 \end{array} \right] =\left[\begin{array}{r} 1 \\ 2 \end{array} \right] ,\ T\left[\begin{array}{r} 0 \\ 1 \\ 0 \end{array} \right] =\left[\begin{array}{r} 9 \\ -3 \end{массив} \right] ,\ T\left[\begin{array}{r} 0 \\ 0 \\ 1 \end{массив} \right] =\left[\begin{массив }{r} 1 \\ 1 \end{array} \right]\nonumber \] Найдите матрицу \(A\) матрицы \(T\) такую, что \(T \left( \vec{x} \right) =A\vec{x}\) для всех \(\vec{x}\).

Решение
По теореме \(\PageIndex{2}\) мы строим \(A\) следующим образом: \[A = \left[\begin{array}{ccc} | & & | \\ T\left( \vec{e}_{1}\right) & \cdots & T\left( \vec{e}_{n}\right) \\ | & & | \end{массив} \right]\nonumber \]
В этом случае \(A\) будет матрицей \(2 \times 3\), поэтому нам нужно найти \(T \left(\vec{e}_1 \right), T \left(\ vec{e}_2 \right),\) и \(T \left(\vec{e}_3 \right)\). К счастью, нам дали эти значения, поэтому мы можем заполнить \(A\) по мере необходимости, используя эти векторы в качестве столбцов \(A\). Следовательно, \[A=\left[\begin{array}{rrr} 1 & 9 & 1 \\ 2 & -3 & 1 \end{array} \right]\nonumber \]
В этом примере мы учитывая результирующие векторы \(T \left(\vec{e}_1 \right), T \left(\vec{e}_2 \right),\) и \(T \left(\vec{e}_3 \верно)\). Построение матрицы \(A\) было простым, так как мы могли просто использовать эти векторы в качестве столбцов \(A\). Следующий пример показывает, как найти \(A\), когда нам не дано так ясно \(T \left(\vec{e}_i \right)\).
9{2}\) и \[T\left[\begin{array}{r} 1 \\ 1 \end{array} \right] =\left[\begin{array}{r} 1 \\ 2 \end {массив} \right], \ T\left[\begin{array}{r} 0 \\ -1 \end{массив} \right] =\left[\begin{array}{r} 3 \\ 2 \ end{array} \right]\nonumber \] Найдите матрицу \(A\) из \(T\) такую, что \(T \left( \vec{x} \right)=A\vec{x}\) для всех \(\vec{x}\).Решение
По теореме \(\PageIndex{2}\) чтобы найти эту матрицу, нам нужно определить действие \(T\) на \(\vec{e}_{1}\) и \( \vec{e}_{2}\). В примере 9.9.2, нам были даны эти результирующие векторы. Однако в этом примере нам дано \(T\) двух разных векторов. Как узнать действие \(T\) на \(\vec{e}_{1}\) и \(\vec{e}_{2}\)? В частности, для \(\vec{e}_{1}\) предположим, что существуют \(x\) и \(y\) такие, что \[\left[\begin{array}{r} 1 \\ 0 \end{array} \right] = x\left[\begin{array}{r} 1\\ 1 \end{array} \right] +y\left[\begin{array}{r} 0 \\ — 1 \end{array} \right] \label{matrixvalues}\]
Тогда, поскольку \(T\) является линейным, \[T\left[\begin{array}{r} 1 \\ 0 \end{ array} \right] = x T\left[\begin{array}{r} 1 \\ 1 \end{array} \right] +y T\left[\begin{array}{r} 0 \\ -1 \end{массив} \right]\nonumber \]
Подставляя значения, эта сумма становится \[T\left[\begin{array}{r} 1 \\ 0 \end{array} \right] = x\left[\begin{array}{r} 1 \ \ 2 \end{array} \right] +y\left[\begin{array}{r} 3 \\ 2 \end{array} \right] \label{matrixvalues2}\]
Следовательно, если мы знаем значения \(x\) и \(y\), которые удовлетворяют \(\eqref{matrixvalues}\), мы можем подставить их в уравнение \(\eqref{matrixvalues2}\).
Таким образом, мы находим \(T\left(\vec{e}_1\right)\), который является первым столбцом матрицы \(A\).Продолжаем находить \(x\) и \(y\). Мы делаем это, решая \(\eqref{matrixvalues}\), что можно сделать, решая систему \[\begin{array}{c} x = 1 \\ x — y = 0 \end{array}\nonumber \]
Мы видим, что \(x=1\) и \(y=1\) являются решением этой системы. Подставив эти значения в уравнение \(\eqref{matrixvalues2}\), мы получим \[T\left[\begin{array}{r} 1 \\ 0 \end{array} \right] = 1 \left[\begin {array}{r} 1 \\ 2 \end{array} \right] + 1 \left[\begin{array}{r} 3 \\ 2 \end{array} \right] = \left[\begin{ array}{r} 1 \\ 2 \end{array} \right] + \left[\begin{array}{r} 3 \\ 2 \end{array} \right] = \left[\begin{array} {r} 4 \\ 4 \end{массив} \right]\nonumber \]
Следовательно, \(\left[\begin{array}{r} 4 \\ 4 \end{array} \right]\) — это первый столбец \(A\).
Вычисление второго столбца выполняется таким же образом и остается в качестве упражнения.
Результирующая матрица \(A\) имеет вид \[A = \left[\begin{array}{rr} 4 & -3 \\ 4 & -2 \end{array} \right]\nonumber \]
Этот пример иллюстрирует очень длинную процедуру нахождения матрицы \(A\).
{-1}\) и \(B=\left[\begin{array}{rrr} 0 & 2 & 0 \\ 1 & 1 & 0 \\ 1 & 3 & 1 \end{массив} \right]\) 9{-1} =\left[\begin{array}{rrr} 2 & -2 & 4 \\ 0 & 0 & 1 \\ 4 & -3 & 6 \end{array} \right]\nonumber \]В самом деле, вы можете сначала проверить, что \(T(\vec{x})=C\vec{x}\) для трех приведенных выше векторов:
\[\left[\begin{array}{ccc} 2 & — 2 & 4 \\ 0 & 0 & 1 \\ 4 & -3 & 6 \end{массив} \right] \left[\begin{массив}{c} 1 \\ 3 \\ 1 \end{массив} \ right] =\left[\begin{array}{c} 0 \\ 1 \\ 1 \end{array} \right] ,\ \left[\begin{array}{ccc} 2 & -2 & 4 \\ 0 & 0 & 1 \\ 4 & -3 & 6 \end{array} \right] \left[\begin{array}{c} 0 \\ 1 \\ 1 \end{array} \right] =\left [\begin{array}{c} 2 \\ 1 \\ 3 \end{array} \right]\nonumber \] \[\left[\begin{array}{ccc} 2 & -2 & 4 \\ 0 & 0 & 1 \\ 4 & -3 & 6 \end{массив} \right] \left[\begin{array}{c} 1 \\ 1 \\ 0 \end{массив} \right] =\left[ \begin{array}{c} 0 \\ 0 \\ 1 \end{array} \right]\nonumber \] 9{-1}\vec{x} = C\vec{x}\nonumber \]
Вспомните скалярное произведение, рассмотренное ранее.
Рассмотрим карту \(\vec{v}\) \(\mapsto\) \(\mathrm{proj}_{\vec{u}}\left( \vec{v}\right)\), которая принимает вектор a преобразует его в свою проекцию на заданный вектор \(\vec{u}\). Оказывается, эта карта линейна, что следует из свойств скалярного произведения. Это показано следующим образом. \[\begin{align} \mathrm{proj}_{\vec{u}}\left( k \vec{v}+ p \vec{w}\right) &=\left( \frac{(k \ vec{v}+ p \vec{w})\bullet \vec{u}}{ \vec{u}\bullet \vec{u}}\right) \vec{u} \\ &= k \left( \frac{ \vec{v}\bullet \vec{u}}{\vec{u}\bullet \vec{u}}\right) \vec{u}+p \left( { 0,05 дюйма}\frac{ \vec{w}\bullet \vec{u}}{\vec{u}\bullet \vec{u}}\right) \vec{u} \\ &= k \; \mathrm{proj}_{\vec{u}}\left(\vec{v}\right) +p \; \mathrm{proj} _{\vec{u}}\left( \vec{w}\right) \end{align}\] 93\).- Это преобразование происходит от умножения на матрицу?
- Если да, то какая матрица?
Решение
- Во-первых, мы только что видели, что \(T (\vec{v}) = \mathrm{proj}_{\vec{u}}\left( \vec{v}\right)\) является линейным. {th}\) столбец нужной матрицы. Следовательно, нам нужно найти \[\mathrm{proj}_{\vec{u}}\left( \vec{e}_{i}\right) = \left( \frac{\vec{e}_{ i}\bullet \vec{u}}{\vec{u}\bullet \vec{u}}\right) \vec{u}\nonumber \] Для данного вектора \(\vec{u}\), это означает, что столбцы искомой матрицы равны \[ \frac{1}{14}\left[\begin{array}{r} 1 \\ 2 \\ 3 \end{array} \right] , \frac{2 }{14}\left[\begin{array}{r} 1 \\ 2 \\ 3 \end{array} \right] , \frac{3}{14}\left[\begin{array}{r} 1 \\ 2 \\ 3 \end{array} \right]\nonumber \], что вы можете проверить. Следовательно, матрица \(T\) равна \[ \frac{1}{14}\left[\begin{array}{rrr} 1 & 2 & 3 \\ 2 & 4 & 6 \\ 3 & 6 & 9\end{массив} \right]\nonumber\]
Эта страница под названием 5.2: Матрица линейного преобразования I распространяется под лицензией CC BY 4.0 и была создана, изменена и/или курирована Кеном Каттлером (Lyryx) с использованием исходного контента, который был отредактирован в соответствии со стилем и стандартами. платформы LibreTexts; подробная история редактирования доступна по запросу.
 9{2}\) и \[T\left[\begin{array}{r} 1 \\ 1 \end{array} \right] =\left[\begin{array}{r} 1 \\ 2 \end {массив} \right], \ T\left[\begin{array}{r} 0 \\ -1 \end{массив} \right] =\left[\begin{array}{r} 3 \\ 2 \ end{array} \right]\nonumber \] Найдите матрицу \(A\) из \(T\) такую, что \(T \left( \vec{x} \right)=A\vec{x}\) для всех \(\vec{x}\).
9{2}\) и \[T\left[\begin{array}{r} 1 \\ 1 \end{array} \right] =\left[\begin{array}{r} 1 \\ 2 \end {массив} \right], \ T\left[\begin{array}{r} 0 \\ -1 \end{массив} \right] =\left[\begin{array}{r} 3 \\ 2 \ end{array} \right]\nonumber \] Найдите матрицу \(A\) из \(T\) такую, что \(T \left( \vec{x} \right)=A\vec{x}\) для всех \(\vec{x}\).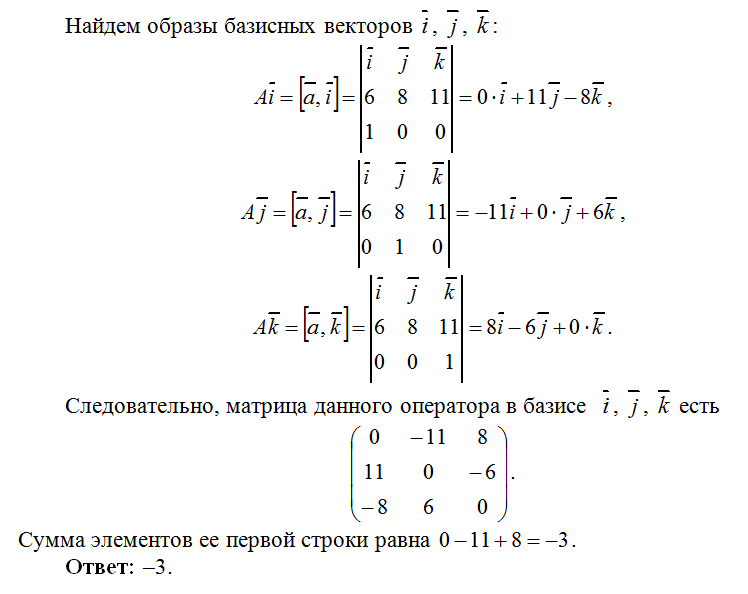 Таким образом, мы находим \(T\left(\vec{e}_1\right)\), который является первым столбцом матрицы \(A\).
Таким образом, мы находим \(T\left(\vec{e}_1\right)\), который является первым столбцом матрицы \(A\). {-1}\) и \(B=\left[\begin{array}{rrr} 0 & 2 & 0 \\ 1 & 1 & 0 \\ 1 & 3 & 1 \end{массив} \right]\) 9{-1} =\left[\begin{array}{rrr} 2 & -2 & 4 \\ 0 & 0 & 1 \\ 4 & -3 & 6 \end{array} \right]\nonumber \]
{-1}\) и \(B=\left[\begin{array}{rrr} 0 & 2 & 0 \\ 1 & 1 & 0 \\ 1 & 3 & 1 \end{массив} \right]\) 9{-1} =\left[\begin{array}{rrr} 2 & -2 & 4 \\ 0 & 0 & 1 \\ 4 & -3 & 6 \end{array} \right]\nonumber \] Рассмотрим карту \(\vec{v}\) \(\mapsto\) \(\mathrm{proj}_{\vec{u}}\left( \vec{v}\right)\), которая принимает вектор a преобразует его в свою проекцию на заданный вектор \(\vec{u}\). Оказывается, эта карта линейна, что следует из свойств скалярного произведения. Это показано следующим образом. \[\begin{align} \mathrm{proj}_{\vec{u}}\left( k \vec{v}+ p \vec{w}\right) &=\left( \frac{(k \ vec{v}+ p \vec{w})\bullet \vec{u}}{ \vec{u}\bullet \vec{u}}\right) \vec{u} \\ &= k \left( \frac{ \vec{v}\bullet \vec{u}}{\vec{u}\bullet \vec{u}}\right) \vec{u}+p \left( { 0,05 дюйма}\frac{ \vec{w}\bullet \vec{u}}{\vec{u}\bullet \vec{u}}\right) \vec{u} \\ &= k \; \mathrm{proj}_{\vec{u}}\left(\vec{v}\right) +p \; \mathrm{proj} _{\vec{u}}\left( \vec{w}\right) \end{align}\] 93\).
Рассмотрим карту \(\vec{v}\) \(\mapsto\) \(\mathrm{proj}_{\vec{u}}\left( \vec{v}\right)\), которая принимает вектор a преобразует его в свою проекцию на заданный вектор \(\vec{u}\). Оказывается, эта карта линейна, что следует из свойств скалярного произведения. Это показано следующим образом. \[\begin{align} \mathrm{proj}_{\vec{u}}\left( k \vec{v}+ p \vec{w}\right) &=\left( \frac{(k \ vec{v}+ p \vec{w})\bullet \vec{u}}{ \vec{u}\bullet \vec{u}}\right) \vec{u} \\ &= k \left( \frac{ \vec{v}\bullet \vec{u}}{\vec{u}\bullet \vec{u}}\right) \vec{u}+p \left( { 0,05 дюйма}\frac{ \vec{w}\bullet \vec{u}}{\vec{u}\bullet \vec{u}}\right) \vec{u} \\ &= k \; \mathrm{proj}_{\vec{u}}\left(\vec{v}\right) +p \; \mathrm{proj} _{\vec{u}}\left( \vec{w}\right) \end{align}\] 93\). {th}\) столбец нужной матрицы. Следовательно, нам нужно найти \[\mathrm{proj}_{\vec{u}}\left( \vec{e}_{i}\right) = \left( \frac{\vec{e}_{ i}\bullet \vec{u}}{\vec{u}\bullet \vec{u}}\right) \vec{u}\nonumber \] Для данного вектора \(\vec{u}\), это означает, что столбцы искомой матрицы равны \[ \frac{1}{14}\left[\begin{array}{r} 1 \\ 2 \\ 3 \end{array} \right] , \frac{2 }{14}\left[\begin{array}{r} 1 \\ 2 \\ 3 \end{array} \right] , \frac{3}{14}\left[\begin{array}{r} 1 \\ 2 \\ 3 \end{array} \right]\nonumber \], что вы можете проверить. Следовательно, матрица \(T\) равна \[ \frac{1}{14}\left[\begin{array}{rrr} 1 & 2 & 3 \\ 2 & 4 & 6 \\ 3 & 6 & 9\end{массив} \right]\nonumber\]
{th}\) столбец нужной матрицы. Следовательно, нам нужно найти \[\mathrm{proj}_{\vec{u}}\left( \vec{e}_{i}\right) = \left( \frac{\vec{e}_{ i}\bullet \vec{u}}{\vec{u}\bullet \vec{u}}\right) \vec{u}\nonumber \] Для данного вектора \(\vec{u}\), это означает, что столбцы искомой матрицы равны \[ \frac{1}{14}\left[\begin{array}{r} 1 \\ 2 \\ 3 \end{array} \right] , \frac{2 }{14}\left[\begin{array}{r} 1 \\ 2 \\ 3 \end{array} \right] , \frac{3}{14}\left[\begin{array}{r} 1 \\ 2 \\ 3 \end{array} \right]\nonumber \], что вы можете проверить. Следовательно, матрица \(T\) равна \[ \frac{1}{14}\left[\begin{array}{rrr} 1 & 2 & 3 \\ 2 & 4 & 6 \\ 3 & 6 & 9\end{массив} \right]\nonumber\]