Алгебра свободных и скользящих векторов
Алгебра свободных и скользящих векторов
ОглавлениеПРЕДИСЛОВИЕВВЕДЕНИЕ ГЛАВА I. ВЕКТОРНАЯ АЛГЕБРА 2. Определение вектора. 3. Классификация векторов. 4. Равенство векторов. 5. Перенос вектора. 6. Нуль-вектор. 7. Компланарность и коллинеарность векторов. 8. Прямопротивоположные векторы. § 2. СЛОЖЕНИЕ И ВЫЧИТАНИЕ ВЕКТОРОВ 2. Сумма векторов. 3. Свойства суммы векторов. 4. Правила параллелограмма и параллелепипеда. 5. Разность двух векторов. 6. Свойства модуля суммы векторов. § 3. УМНОЖЕНИЕ И ДЕЛЕНИЕ ВЕКТОРА НА ЧИСЛО 2. Свойства произведения. 3. Деление вектора на число. 4. Единичные векторы. 5. Орт оси. 6. Коллинеарность двух векторов. § 4. РАЗЛОЖЕНИЕ ВЕКТОРОВ 3. Разложение вектора по трем другим векторам. 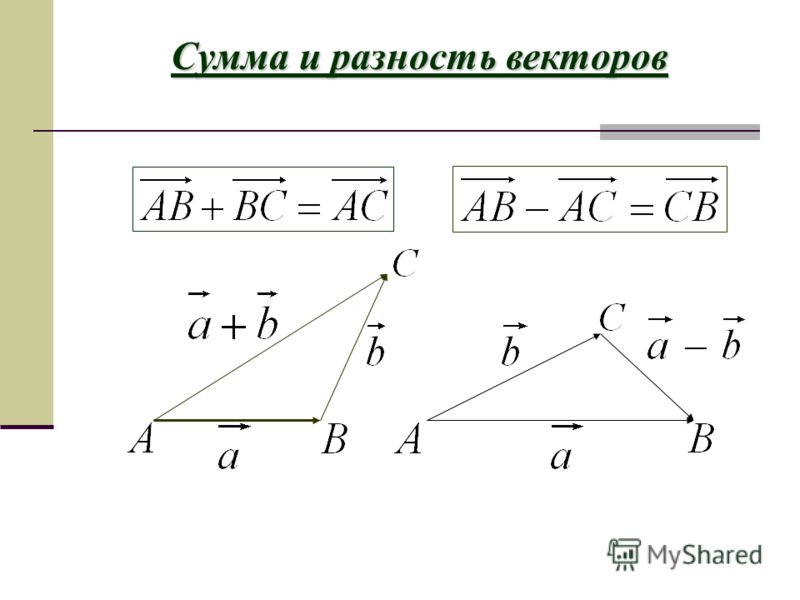 4. Разложение вектора по ортам базиса. § 5. ЛИНЕЙНАЯ ЗАВИСИМОСТЬ ВЕКТОРОВ 2. Условие коллинеарности двух векторов. 3. Условие компланарности трех векторов. 4. Линейная зависимость четырех векторов. § 6. ПРОЕКЦИИ ВЕКТОРА 2. Свойства составляющих вектора. 3. Проекция вектора на ось. 4. Свойства проекций. 5. Угол между векторами. 6. Вычисление проекций вектора. 7. Теорема о проекции сумммы векторов. 8. Псевдоскаляры. § 7. СПОСОБЫ ЗАДАНИЯ ВЕКТОРА 2. Естественный способ задания свободного вектора. 3. Задание свободного вектора с помощью его проекций (координатный метод). 4. Связь между естественным и координатным способами задания вектора. 5. Задание несвободного вектора. 6. Задание скользящего вектора. 7. Некоторые приложения. § 8. СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ДВУХ ВЕКТОРОВ 2. Свойства скалярного произведения. 4. Векторные уравнения геометрических мест.  5. Уравнение плоскости. 7. Изменение проекций вектора при преобразовании координат. 8. Другое определение вектора. § 9. ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ 2. Примеры из физики. 3. Способ Н. Е. Жуковского построения векторного произведения. 4. Свойства векторного произведения. 5. Разложение вектора-произведения по координатным ортам. 6. Условие коллинеарности двух векторов. 7. Тождество Лагранжа. 8. Полярные и аксиальные векторы. § 10. СЛОЖНЫЕ ПРОИЗВЕДЕНИЯ ВЕКТОРОВ 2. Двойное векторное произведение. 3. Разложение вектора по трем другим векторам. 4. Скалярное произведение двух векторных произведений. 5. Векторное произведение двух векторных произведений. 6. Произведение двух смешанных произведений. 7. Взаимные реперы. § 11. ВЕКТОРНЫЕ УРАВНЕНИЯ ПРЯМОЙ ЛИНИИ 2. Уравнение прямой, проходящей через две заданные точки. 3. Плюкерово уравнение прямой в пространстве. 4. Прямая как пересечение двух плоскостей. § 12. ИНВАРИАНТЫ ОТНОСИТЕЛЬНО ПРЕОБРАЗОВАНИЯ ОСЕЙ ГЛАВА II. 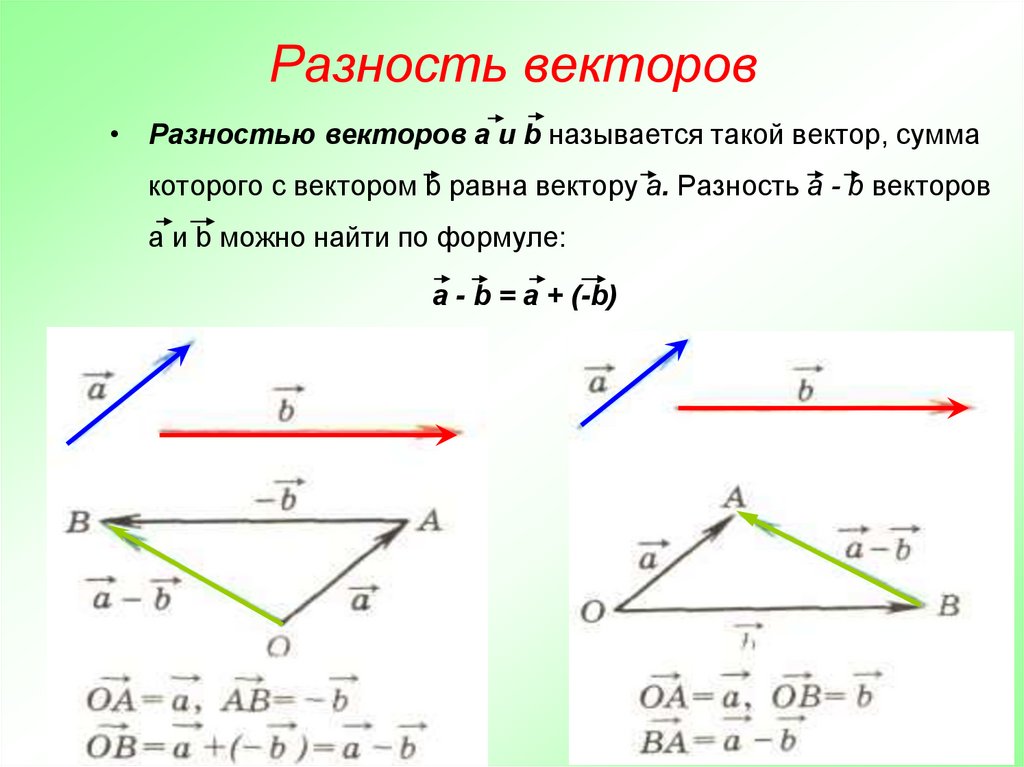 АЛГЕБРА СКОЛЬЗЯЩИХ ВЕКТОРОВ АЛГЕБРА СКОЛЬЗЯЩИХ ВЕКТОРОВ§ 13. МОМЕНТ ВЕКТОРА ОТНОСИТЕЛЬНО ТОЧКИ И ОСИ. ЗАДАНИЕ СКОЛЬЗЯЩЕГО ВЕКТОРА 2. Момент вектора относительно точки. 3. Проекции момента. 4. Момент вектора относительно оси. 5. Задание скользящего вектора его проекциями и моментами относительно координатных осей. § 14. ГЛАВНЫЙ ВЕКТОР И ГЛАВНЫЙ МОМЕНТ СИСТЕМЫ ВЕКТОРОВ 2. Главный вектор системы векторов. 3. Главный момент системы векторов. 4. Система двух равнопротивоположных векторов. 5. Первая теорема Вариньона. 6. Изменение главного момента с изменением полюса. 8. Минимальный момент и центральная ось системы. 9. Распределение главных моментов в пространстве. 10. Понятие о винте. 11. Винт системы векторов. § 15. ЭКВИВАЛЕНТНЫЕ СИСТЕМЫ ВЕКТОРОВ 2. Основные определения и аксиомы. § 16. ПРИВЕДЕНИЕ СИСТЕМЫ СВОБОДНЫХ ВЕКТОРОВ К ПРОСТЕЙШЕМУ ВИДУ § 17. ЭКВИВАЛЕНТНЫЕ СИСТЕМЫ СКОЛЬЗЯЩИХ ВЕКТОРОВ 2. Приведение произвольной системы скользящих векторов к системе двух векторов (геометрическое решение). 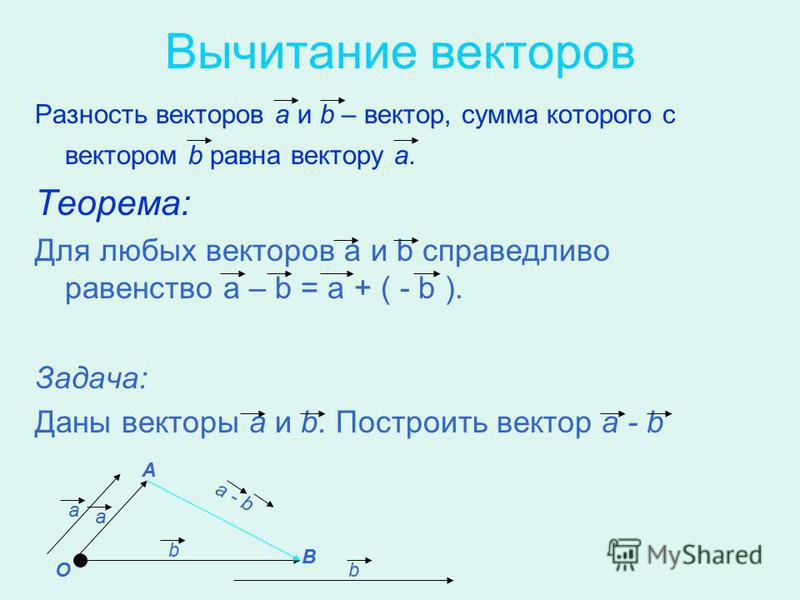 § 18. УСЛОВИЯ ЭКВИВАЛЕНТНОСТИ ДВУХ СИСТЕМ СКОЛЬЗЯЩИХ ВЕКТОРОВ 2. Условия эквивалентности двух систем скользящих векторов. 3. Преобразование эквивалентных систем. § 19. ТЕОРИЯ ПАР 1. Пара векторов и ее момент. 2. Свойства пар. 3. Винт § 20. ПРИВЕДЕНИЕ СИСТЕМЫ СКОЛЬЗЯЩИХ ВЕКТОРОВ К ПРОСТЕЙШЕМУ ВИДУ 2. Приведение системы скользящих векторов к системе двух векторов (аналитическое решение). 3. Приведение системы скользящих векторов к вектору и паре. 4. Пример из кинематики. 5. Приведение системы скользящих векторов к винту. 6. Примеры. 7. Уравнения равновесия векторов. 8. Вторая теорема Вариньона. § 21. ИССЛЕДОВАНИЕ ЧАСТНЫХ СЛУЧАЕВ 2. Плоская система скользящих векторов. 3. Система параллельных скользящих векторов. 4. Центр системы параллельных векторов. |

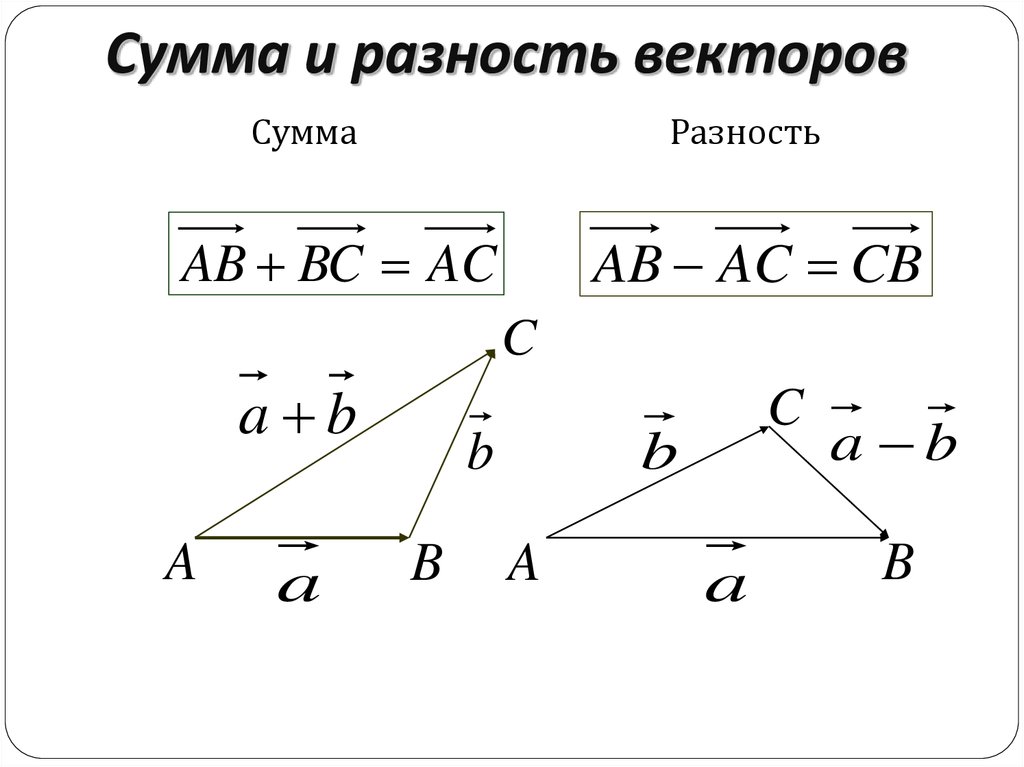
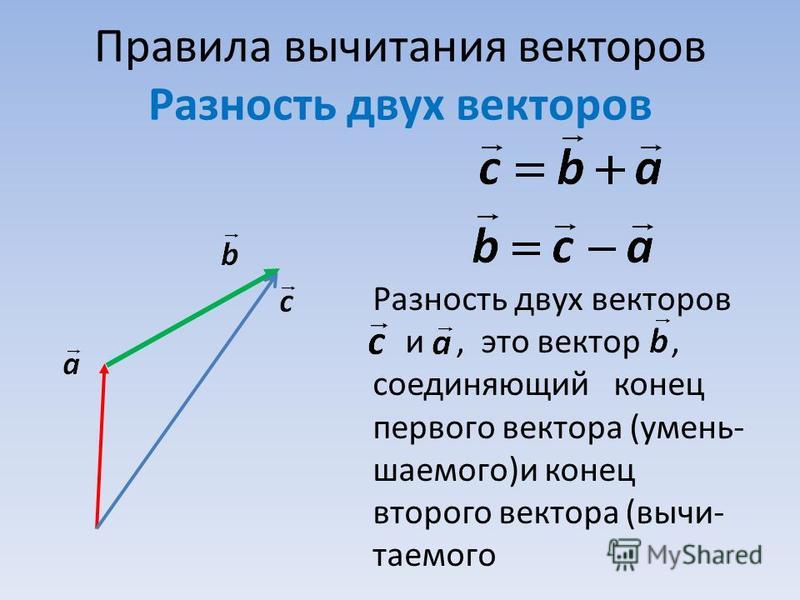
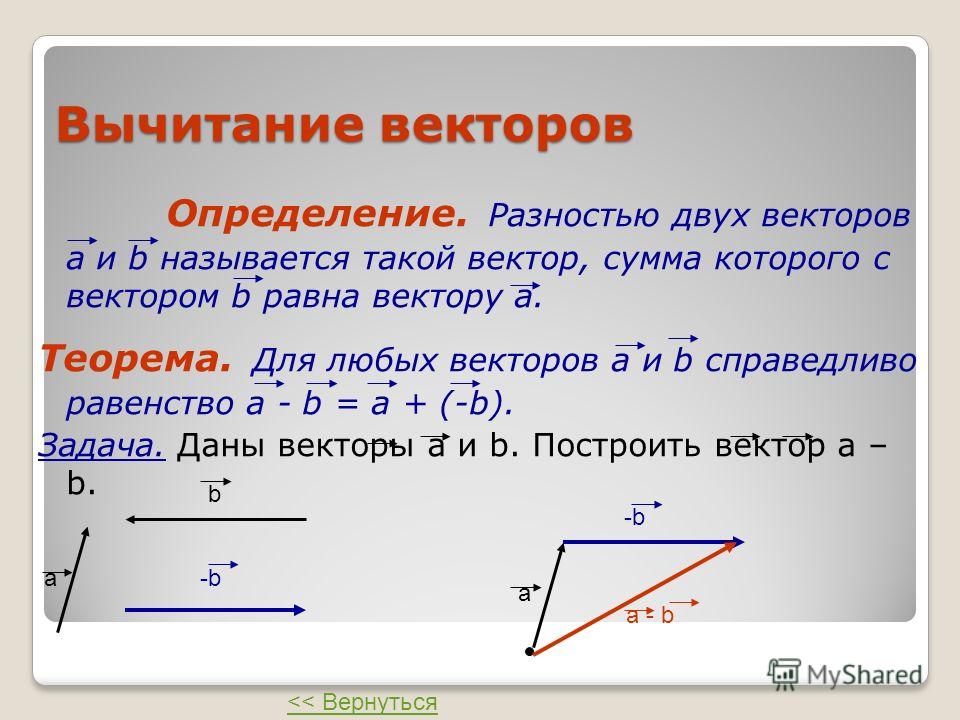
Разность векторов
Разностью x-y векторов x и y называется вектор z такой, что z+y=x.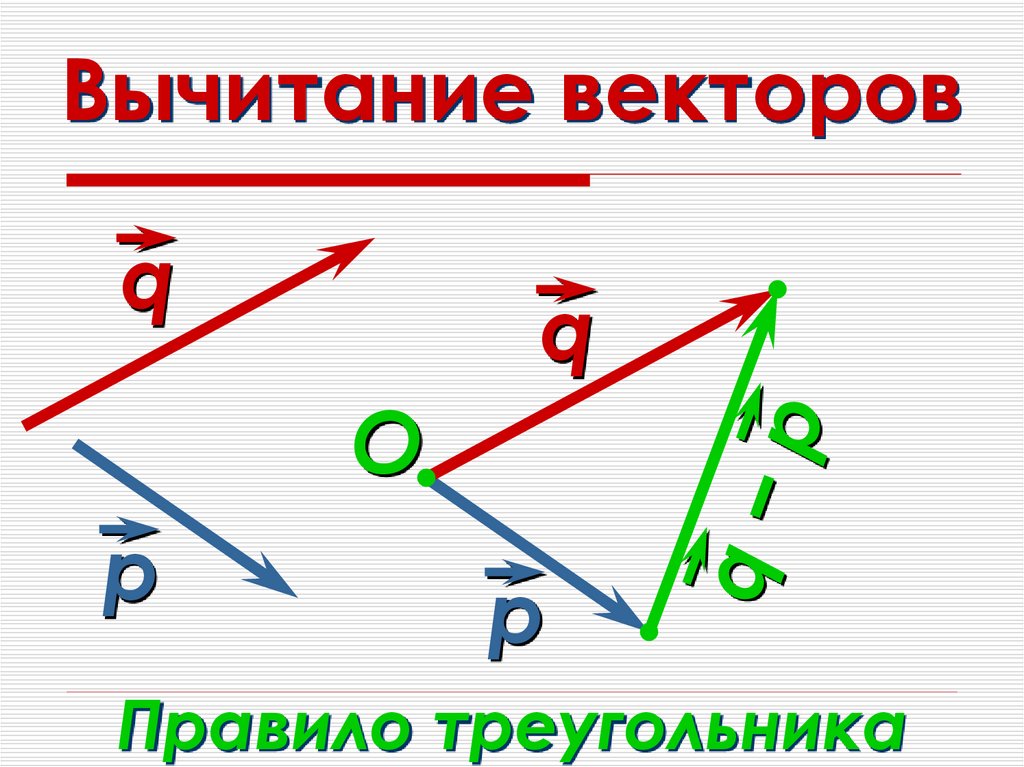
Вариант 1. Начальные точки всех векторов совпадают с началом координат.
Построим разность векторов и .
Для построения разницы векторов z=x-y, нужно сложить вектор x
Вектор y’ является противоположным к вектору y, так как y+y’=0, где 0 — нулевой вектор соответствующего размера. Далее выполняется сложение векторов x и y’:
Из выражения (1) видно что для построения разницы векторов достаточно вычислить разницы соответствующих координатов векторов x и y.
Рис. 1
На рисунке Рис. 1 в двухмерном пространстве представлен разность векторов x=(10,3) и y=(2,4).
Вычислим z=x-y=(10-3,3-4)=(7,-1). Сравним полученный результат с геометрической интерпретацией. Действительно, после построения вектора y’ и параллельного перемещения начальной точки вектора y’ на конечную точку вектора x, получим вектор y», а после сложения векторов x
и y», получим вектор z.
Вариант 2. Начальные точки векторов произвольные.
В этом случае процесс вычисления разницы векторов не так очевиден. Для построения разницы векторов z=x-y, нужно сложить вектор x с противоположным к y вектором y’. Здесь в качестве противоположного к вектору y можно взять тот же вектор y и поменять направление вектора, изменив начальный и коненый точки местами. Можно также взять вектор y’, который симметричен с y относительно начала координат. Если начальный и конечный точки вектора y и , то начальный и конечный точки противоположного вектора y’ будут и соответственно. Таким образом для вычисления разницы векторов x и y, вычисляем сумму векторов x и y’ (подробно см. в разделе сложение векторов).
Рис. 2
На рисунке Рис. 2 в двухмерном пространстве представлен разность векторов
 Для вычисления вектора z=x-y, построен противоположный к вектору y вектор y’:
Для вычисления вектора z=x-y, построен противоположный к вектору y вектор y’:Далее нужно сложить векторы x и y’. Вектор y’ перемещается параллельно так, чтобы точка C’ совпала с точкой B. Для этого вычисляются разницы координатов точек B и С:
Получаем:
Для перемещения точки D’ на точку E, сделаем следующее преобразование координат точки D’
: В результате получим вектор z=AE, A(1,0), E(9, -1), который является разницей векторов x=AB и y=CD.Интерпретация оси ЭКГ • LITFL • Основы библиотеки ЭКГ
Сердечная ось представляет собой сумму векторов деполяризации, генерируемых отдельными кардиомиоцитами. Клинически это отражается осью желудочков, и интерпретация зависит от определения взаимосвязи между осью QRS и отведениями от конечностей на ЭКГ (ниже на диаграмме)
Клинически это отражается осью желудочков, и интерпретация зависит от определения взаимосвязи между осью QRS и отведениями от конечностей на ЭКГ (ниже на диаграмме)
Поскольку в нормальных условиях левый желудочек составляет большую часть сердечной мышцы, нормальная сердечная ось направлен вниз и немного влево:
- Нормальная ось = ось QRS между -30° и +90°.
Аномальное отклонение оси, указывающее на лежащую в основе патологию, демонстрируется:
- Отклонение оси влево = ось QRS менее -30°.
- Отклонение оси вправо
- Экстремальное отклонение оси = ось QRS между -90° и 180° (также известная как «северо-западная ось»).
Обратите внимание, что при интерпретации педиатрической ЭКГ ось сердца лежит в диапазоне от +30 до +190 градусов при рождении и движется влево с возрастом .
CardiacAxis.comМетоды интерпретации оси ЭКГ
Существует несколько дополнительных подходов к оценке оси QRS, которые обобщены ниже: (Отведение I, Отведение II и aVF)
Метод 1 – Метод квадранта
Наиболее эффективный способ оценки оси — посмотреть на ОТВЕДЕНИЕ I и ОТВЕДЕНИЕ aVF .
Изучите комплекс QRS в каждом отведении и определите, является ли он положительным, изоэлектрическим (эквифазным) или отрицательным: Положительный QRS в отведении aVF аналогично выравнивает ось с отведением aVF. Примечание: **Возможный LAD можно дополнительно оценить с помощью Lead II , как подробно описано в методе 2 ниже… Далее мы добавляем отведения II к анализу отведения I и aVF. Теперь оцените AXIS с помощью анализа трех отведений: Этот метод позволяет более точно оценить ось QRS, используя диаграмму оси ниже. Шаг 1: Найдите изоэлектрический электрод. Изоэлектрическое (равнофазное) отведение — это лобное отведение с нулевой амплитудой . Это может быть: Шаг 2: Найдите положительные выводы. Шаг 3: Рассчитайте ось QRS. Поначалу эту концепцию может быть трудно понять, и лучше всего ее можно проиллюстрировать несколькими примерами. Пример 10004 Это пример отклонения ЭОС вправо вследствие гипертрофии правого желудочка. Это пример пограничного отклонения осевой оси влево из-за нижнего ИМ. Примечание. Наличие положительного QRS в aVR с отрицательным QRS в нескольких отведениях является еще одним признаком наличия экстремального отклонения оси. Это пример крайнего отклонения оси из-за желудочковой тахикардии. Это называется «вертикальной осью» и наблюдается у пациентов с эмфиземой, у которых обычно сердце расположено вертикально. вести. Онлайн Учебники Цитируйте эту статью как: Майк Кадоган и Роберт Баттнер, «Интерпретация оси ЭКГ», В: LITFL — Life in the FastLane , по состоянию на 10 февраля 2023 г. Теперь оцените AXIS, используя отведение I и aVF – метод квадрантов:
AXIS: QRS положительное отведение I – QRS отрицательное отведение aVFAXIS: QRS отрицательное отведение I – QRS положительное отведение aVFAXIS: QRS отрицательное отведение I – QRS отрицательное отведение aVF Сводная таблица:
Метод 2: анализ трех отведений – (отведение I, отведение II и aVF)

Сводная таблица:
Метод 3 – Изоэлектрическое отведение
Ключевые принципы
Пример 2 Ответ — Метод квадранта
Ответ – Метод изоэлектрического отведения
Ответ – Метод изоэлектрического отведения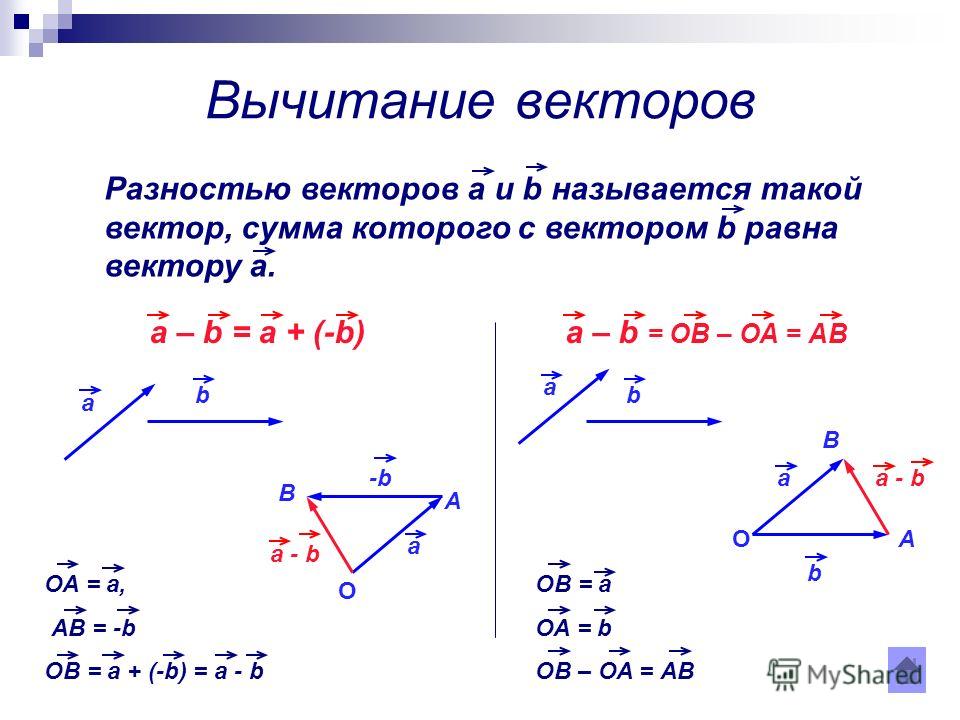 90°, т.е. нормальный или LAD.
90°, т.е. нормальный или LAD.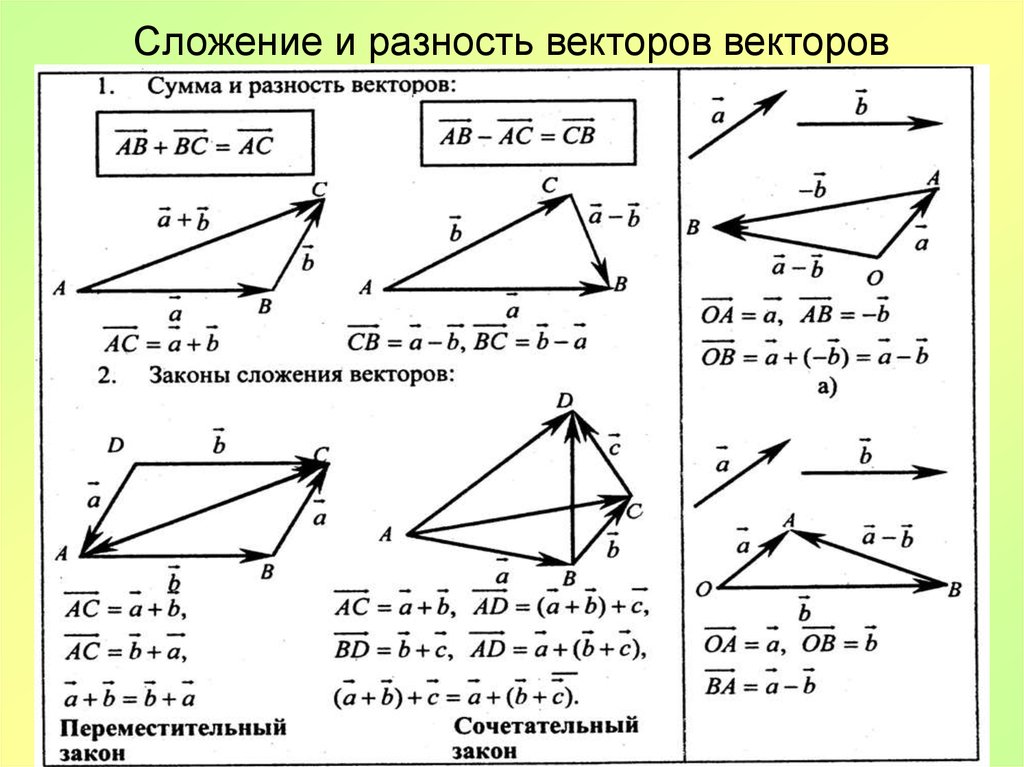 е. крайнее отклонение оси .
е. крайнее отклонение оси .
Причины отклонения оси
Отклонение оси вправо
Отклонение оси левого желудочка
Экстремальная оси.
9009 Вент
Экстрему , AIVR, желудочковая эктопия
Дополнительная литература
Дополнительная литература