
Алгоритм вычисления обратной матрицы.
1. Находим определитель исходной матрицы. Если , то матрица- вырожденная и обратной матрицыне существует. Если, то матрицаневырожденная и обратная матрица существует.
2. Находим матрицу , транспонированную к.
3. Находим алгебраические дополнения элементов и составляем из них присоединенную матрицу.
4. Составляем обратную матрицу по формуле .
5. Проверяем правильность вычисления обратной матрицы , исходя из ее определения:.
Пример. Найти матрицу, обратную данной: .
Р е ш е н и е.
1) Определитель матрицы
.
2) Находим алгебраические дополнения элементов матрицы и составляем из них присоединенную матрицу :
.
3) Вычисляем обратную матрицу:
,
4) Проверяем:
.
№4 Ранг матрицы. Линейная независимость строк матрицы
Для решения и исследования ряда математических и прикладных задач важное значение имеет понятие ранга матрицы.
В матрице размеромвычеркиванием каких-либо строк и столбцов можно вычленить квадратные подматрицы-го порядка, где. Определители таких подматриц называютсяминорами -го порядка матрицы.
Например, из матриц можно получить подматрицы 1, 2 и 3-го порядка.
Определение. Рангом матрицы называется наивысший порядок отличных от нуля миноров этой матрицы. Обозначение:или.
Из определения следует:
1) Ранг матрицы не превосходит меньшего из ее размеров, т.е..
2) тогда и только тогда, когда все элементы матрицы равны нулю, т.е..
3)
Для квадратной матрицы n-го порядка
тогда
и только тогда, когда матрица-
невырожденная.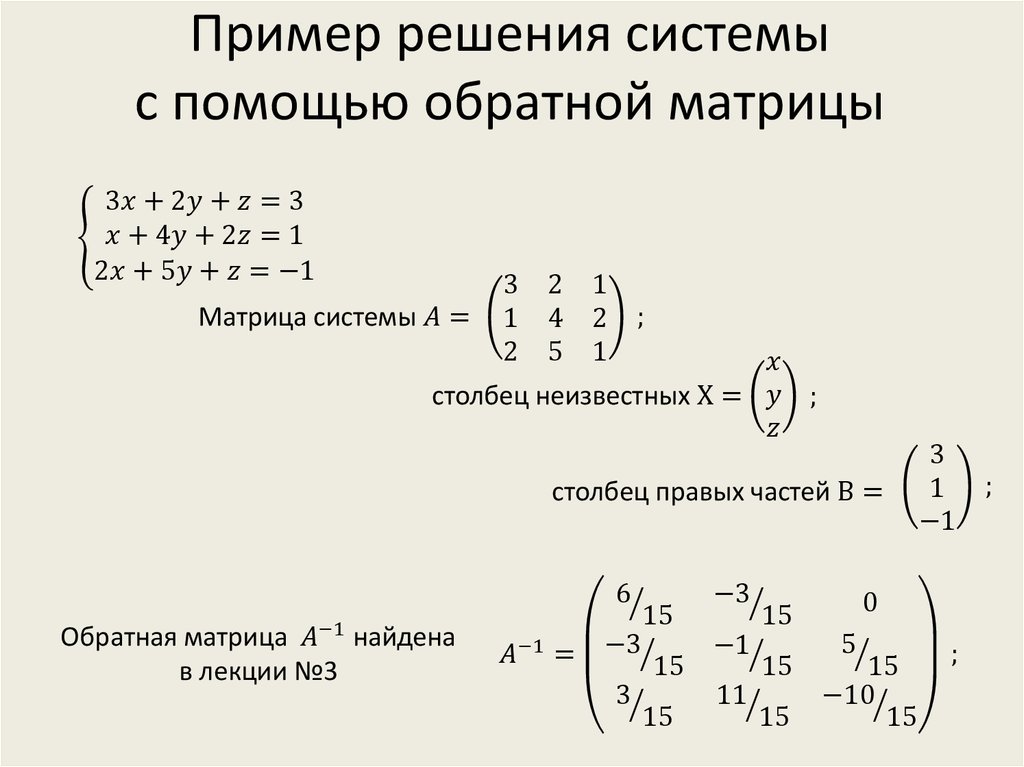
Поскольку непосредственный перебор всех возможных миноров матрицы , начиная с наибольшего размера, затруднителен (трудоемок), то пользуются элементарными преобразованиями матрицы, сохраняющими ранг матрицы.
1) Отбрасывание нулевой строки (столбца).
2) Умножение всех элементов строки (столбца) на число .
3) Изменение порядка строк (столбцов) матрицы.
4) Прибавление к каждому элементу одной строки (столбца) соответствующих элементов другой строки (столбца), умноженных на любое число.
5) Транспонирование матрицы.
Определение. Матрица , полученная из матрицыпри помощи элементарных преобразований, называется эквивалентной и обозначается
Теорема. Ранг матрицы не изменяется при элементарных преобразованиях матрицы.
С
помощью элементарных преобразований
можно привести матрицу к так называемому
ступенчатому виду, когда вычисление ее
ранга не представляет труда.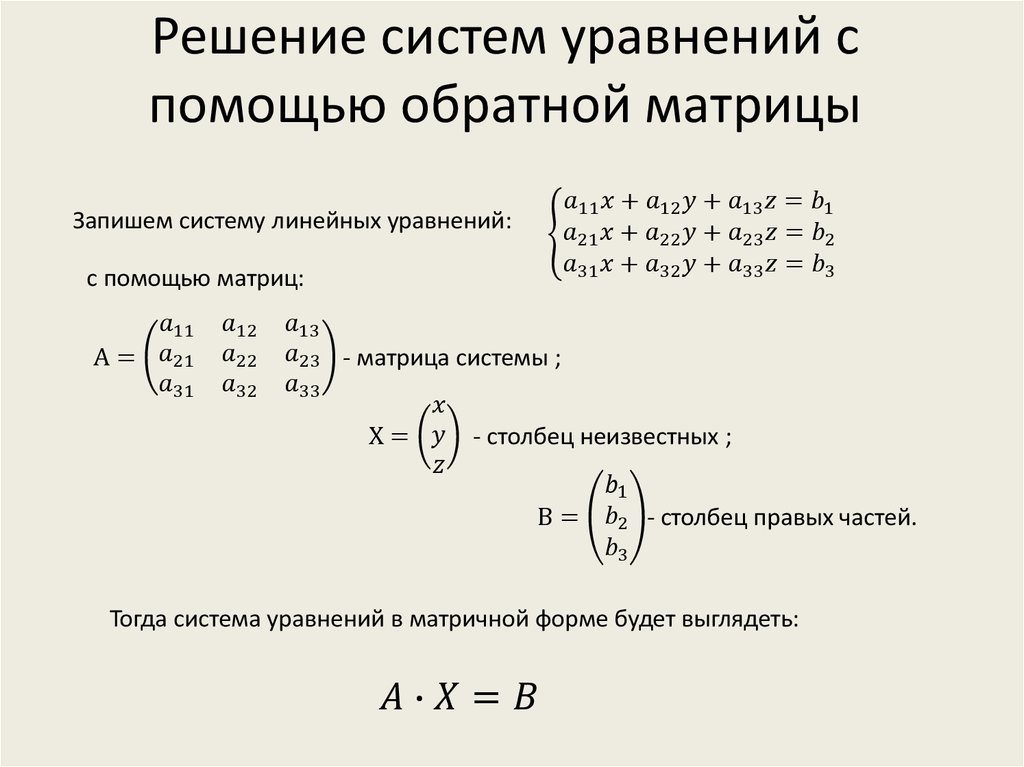
Матрица называется ступенчатой если она имеет вид:
, где ,,.
Очевидно, что ранг ступенчатой матрицы равен числу ненулевых строк , т.к. имеется минор-го порядка, не равный нулю:
.
Пример. Определить ранг матрицы с помощью элементарных преобразований.
.
Ранг матрицы равен количеству ненулевых строк, т.е. .
№5Линейная независимость строк матрицы
Дана матрица размераОбозначим строки матрицы следующим образом:
Две строки называются равными, если равны их соответствующие элементы. .
Введем операции умножения строки на число и сложение строк как операции, проводимые поэлементно:
.
Определение. Строка называется линейной комбинацией строкматрицы, если она равна сумме произведений этих строк на произвольные действительные числа(любые числа):
.
Определение. Строки матрицы называютсялинейно зависимыми, если существует такие числа , не равные одновременно нулю, что линейная комбинация строк матрицы равна нулевой строке:
, где . (1.1)
Линейная зависимость строк матрицы обозначает, что хотя бы 1 строка матрицы является линейной комбинацией остальных.
Определение. Если линейная комбинация строк (1.1) равна нулю тогда и только тогда, когда все коэффициенты , то строкиназываютсялинейно независимыми.
Теорема о ранге матрицы. Ранг матрицы равен максимальному числу ее линейно независимых строк или столбцов, через которые линейно выражаются все остальные строки (столбцы).
Теорема играет принципиальную роль в матричном анализе, в частности, при исследовании систем линейных уравнений.
№6 Решение системы линейных уравнений снеизвестными
Системы
линейных уравнений находят широкое
применение в экономике.
Система линейных уравнений спеременными имеет вид:
,
где () — произвольные числа, называемыекоэффициентами при переменных и свободными членами уравнений, соответственно.
Краткая запись: ().
Определение. Решением системы называется такая совокупность значений , при подстановке которых каждое уравнение системы обращается в верное равенство.
1) Система уравнений называется совместной, если она имеет хотя бы одно решение, и несовместной, если она не имеет решений.
2) Совместная система уравнений называется определенной, если она имеет единственное решение, и неопределенной, если она имеет более одного решения.
3)
Две системы уравнений называются равносильными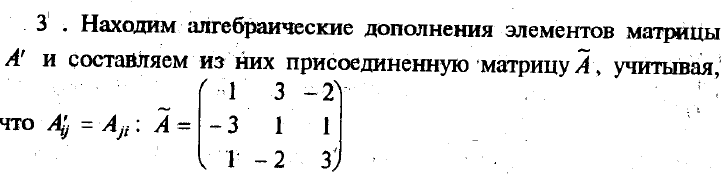
Алгоритм нахождения обратной матрицы
Действия над матрицой
1. Сложение и вычитание матриц:
Сложение и вычитание матриц — одно из простейших действий над ними, т.к. необходимо сложить или отнять соответствующие элементы двух матриц. Главное помнить, что складывать и вычитать можно только матрицы одинаковых размеров, т.е. тех, у которых одинаковое количество строк и одинаковое количество столбцов.
Например, пусть даны две матрицы равного размера 2х3, т.е. с двумя строками и тремя столбцами:
Сумма двух матриц:
Разность двух матриц:
2. Умножение матрицы на число:
Умножение матрицы на число — процесс, заключающийся в умножении числа на каждый элемент матрицы.Например, пусть дана матрица А:
Умножим число 3 на матрицу А:
3. Умножение
двух матриц:
Умножение
двух матриц:
Умножение двух матриц возможно только при условии, что число столбцов первой матрицы должно равняться числу строк второй. Новая матрица, которая получится при умножении матриц, будет состоять из количества строк, равное количеству столбцов первой матрицы и количества столбцов, равное количеству строк второй матрицы.
Предположим есть две матрицы размерами 3х4 и 4х2, т.е. в первой матрице 3 строки и 4 столбца, а во второй матрице 4 строки и 2 столбца. Т.к. количество столбцов первой матрицы (4), равно количеству строк второй матрицы (4), то матрицы можно перемножить, новая матрица будет иметь размер: 3х2, т.е. 3 строки и 2 столбца.
Можно представить все это в виде схемы:
После
того как Вы определились с размером
новой матрицы, которая получится при
умножении двух матриц, можно приступить
к заполнению этой матрицы элементами.
Если Вам надо заполнить первую строчку
первого столбца этой матрицы, то надо
каждый элемент первой строки первой
матрицы умножать на каждый элемент
первого столбца второй матрицы, если
будем заполнять вторую строку первого
столбца соответственно будем брать
каждый элемент второй строки первой
матрицы и умножать на первый столбец
второй матрицы и т.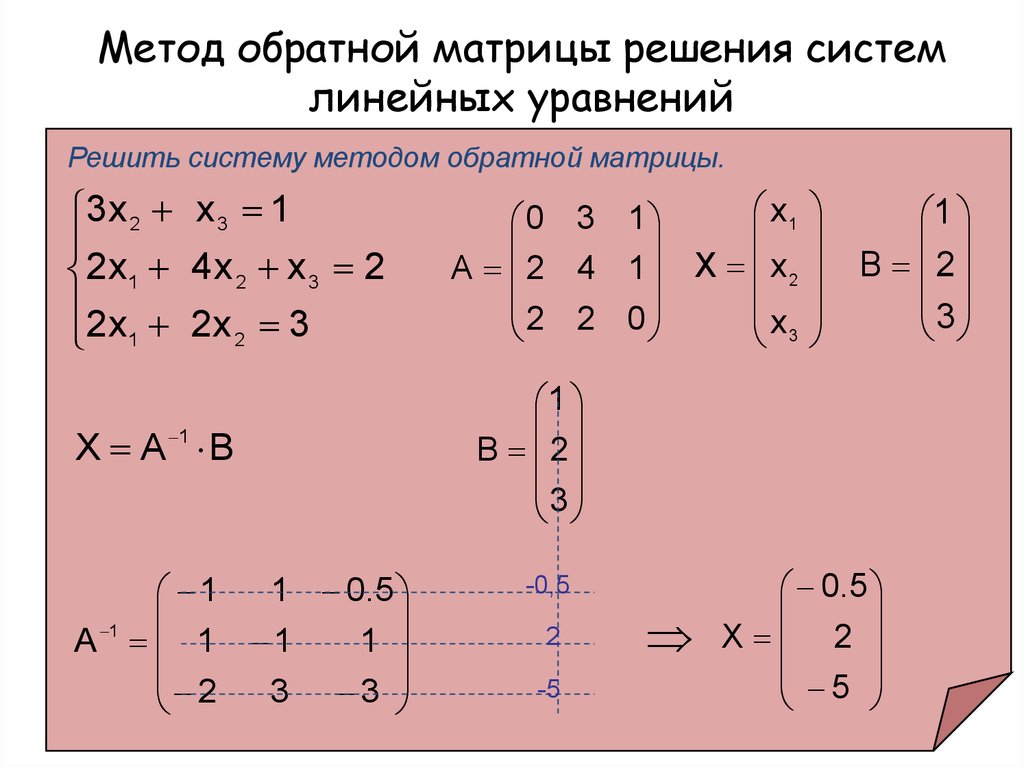 д.
д.
Посмотрим как это выглядит на схеме:
Посмотрим как это выглядит на примере:
Даны две матрицы:
Найдем произведение этих матриц:
4. Деление матриц:
Деление матриц — действие над матрицами, которое в этом понятии не встретишь в учебниках. Но если есть необходимость разделить матрицу А на матрицу В, то в этом случае используют одно из свойств степеней:
Согласно этому свойству разделим матрицу А на матрицу В:
В результате задача о делении матриц сводиться к умножению обратной матрицы матрице В на матрицу А.
Обратная матрица
Пусть имеется квадратная матрица n-го порядка
Матрица А-1 называется обратной матрицей по отношению к матрице А, если А*А-1 = Е, где Е — единичная матрица n-го порядка.
Единичная матрица — такая квадратная матрица, у которой все элементы по главной диагонали, проходящей от левого верхнего угла к правому нижнему углу, — единицы, а остальные — нули, например:
Обратная
матрица может
существовать только
для квадратных матриц т.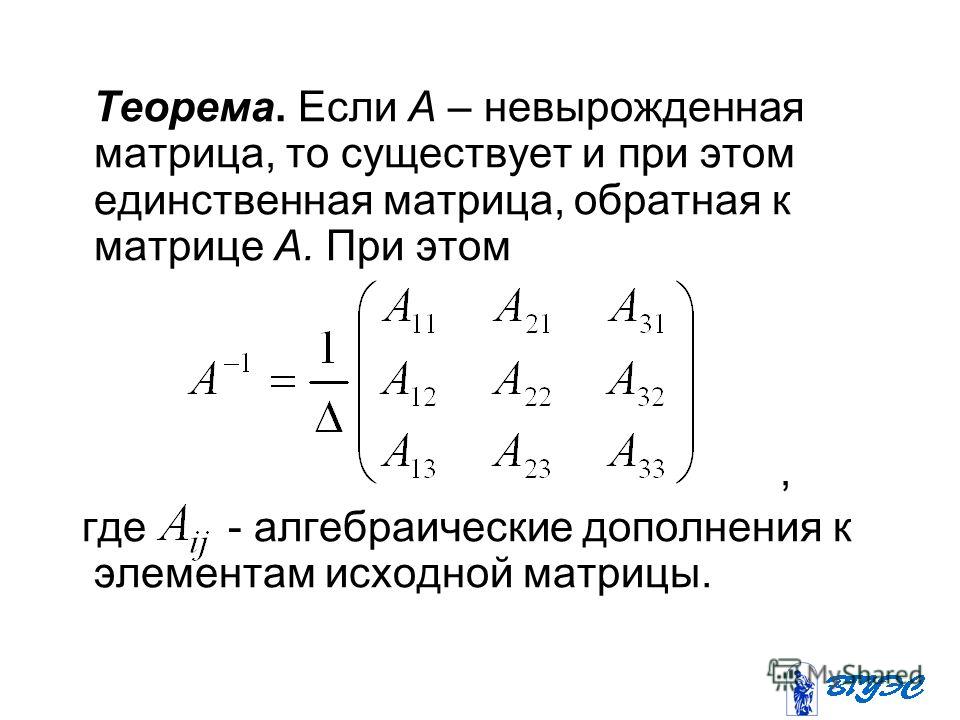 е.
для тех матриц, у которых число строк и
столбцов совпадают.
е.
для тех матриц, у которых число строк и
столбцов совпадают.
Теорема условия существования обратной матрицы
Для того чтобы матрица имела обратную матрицу необходимо и достаточно, чтобы она была невырожденной.
Матрица А = (А1, А2,…Аn) называется невырожденной, если векторы-столбцы являются линейно независимыми. Число линейно независимых векторов-столбцов матрицы называется рангом матрицы . Поэтому можно сказать, что для того, чтобы существовала обратная матрица, необходимо и достаточно, чтобы ранг матрицы равнялся ее размерности, т.е. r = n.
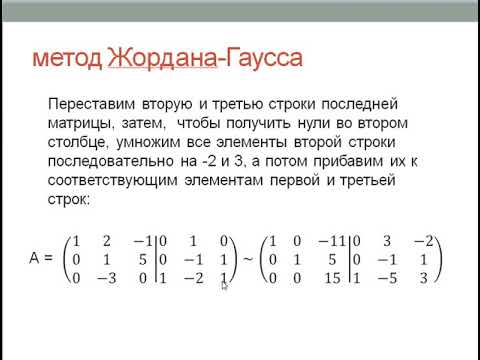
Записать в таблицу для решения систем уравнений методом Гаусса матрицу А и справа (на место правых частей уравнений) приписать к ней матрицу Е.
Используя преобразования Жордана, привести матрицу А к матрице, состоящей из единичных столбцов; при этом необходимо одновременно преобразовать матрицу Е.
Если необходимо, то переставить строки (уравнения) последней таблицы так, чтобы под матрицей А исходной таблицы получилась единичная матрица Е.

Записать обратную матрицу А-1, которая находится в последней таблице под матрицей Е исходной таблицы.

Пример 1
Для матрицы А найти обратную матрицу А-1
Решение: Записываем матрицу А и справа приписываем единичную матрицу Е. Используя преобразования Жордана, приводим матрицу А к единичной матрице Е. Вычисления приведены в таблице 31.1.
Проверим правильность вычислений умножением исходной матрицы А и обратной матрицы А-1.
В результате умножения матриц получилась единичная матрица. Следовательно, вычисления произведены правильно.
Ответ:
Определители матриц, способ № 1:
Определителем квадратной матрицы (det A) называется число, которое может быть вычислено по элементам матрицы по формуле:
,
где М1k — определитель
матрицы (детерминант),
полученной из исходной матрицывычеркиванием
первой строки и k — oго столбца.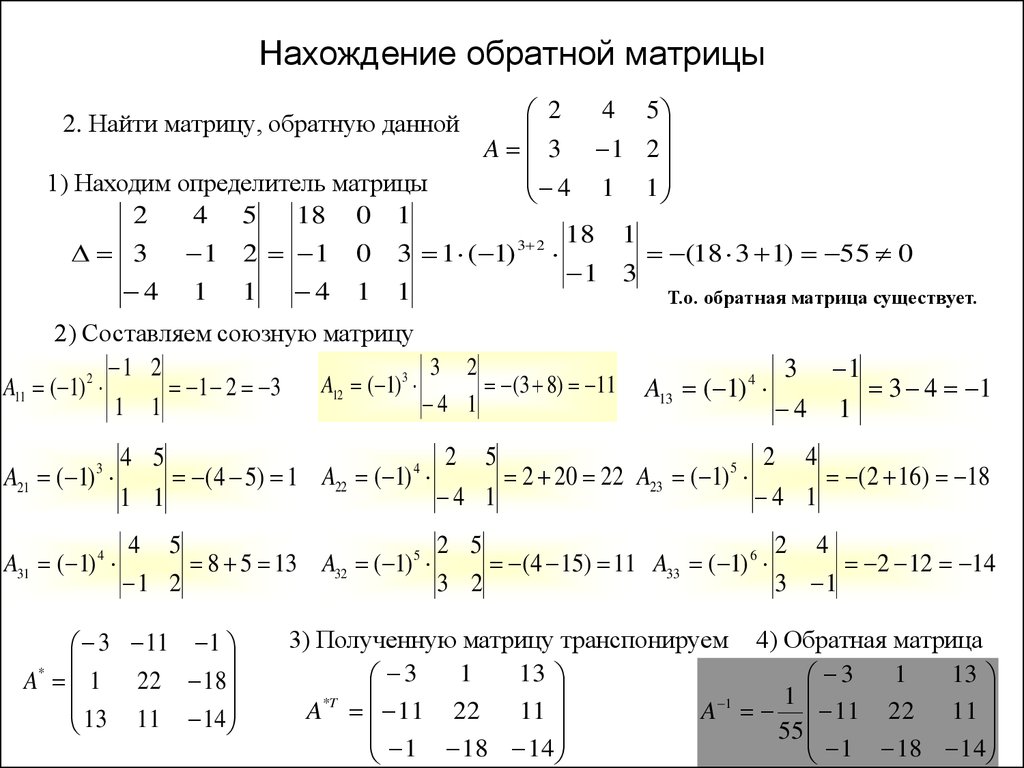 Следует
обратить внимание на то, чтоопределители имеют
только квадратные матрицы,
т.е. матрицы, у которых число строк равно
числу столбцов. Первая формула позволяет
вычислить определитель
матрицы по
первой строке, также справедлива формула
вычисления определителя
матрицы по
первому столбцу:
Следует
обратить внимание на то, чтоопределители имеют
только квадратные матрицы,
т.е. матрицы, у которых число строк равно
числу столбцов. Первая формула позволяет
вычислить определитель
матрицы по
первой строке, также справедлива формула
вычисления определителя
матрицы по
первому столбцу:
Вообще говоря, определитель матрицы может вычисляться по любой строке или столбцуматрицы, т.е. справедлива формула:
Очевидно, что различные матрицы могут иметь одинаковые определители. Определитель единичной матрицы равен 1. Для указанной матрицы А число М1k называется дополнительным минором элемента матрицы a1k. Таким образом, можно заключить, что каждый элемент матрицы имеет свой дополнительный минор. Дополнительные миноры существуют только в квадратных матрицах.
Дополнительный
минор произвольного элемента
квадратной матрицы aij равенопределителю
матрицы,
полученной из исходной матрицы вычеркиванием
i-ой строки и j-го столбца.
Определители матриц, способ № 2:
Определителем матрицы первого порядка, или определителем первого порядка, называется элемент а11:
Определителем матрицы второго порядка, или определителем второго порядка, называется число, которое вычисляется по формуле:
Определителем матрицы третьего порядка, или определителем третьего порядка, называется число, которое вычисляется по формуле:
Это число представляет алгебраическую сумму, состоящую из шести слагаемых. В каждое слагаемое входит ровно по одному элементу из каждой строки и каждого столбца матрицы. Каждое слагаемое состоит из произведения трех сомножителей.
Знаки,
с которыми члены определителя
матрицы входят
в формулу нахождения
определителя матрицы третьего
порядка можно определить, пользуясь
приведенной схемой, которая называется
правилом треугольников или правилом
Сарруса. Первые три слагаемые берутся
со знаком плюс и определяются из левого
рисунка, а последующие три слагаемые
берутся со знаком минус и определяются
из правого рисунка.
Первые три слагаемые берутся
со знаком плюс и определяются из левого
рисунка, а последующие три слагаемые
берутся со знаком минус и определяются
из правого рисунка.
Замечание:
Вычисление определителей матриц четвертого и более высокого порядка приводит к большим вычислениям, так как:
для нахождения определителя матрицы первого порядка мы находим одно слагаемое, состоящее из одного сомножителя;
для нахождения определителя матрицы второго порядка нужно вычислить алгебраическую сумму из двух слагаемых, где каждое слагаемое состоит из произведения двух сомножителей;
для нахождения определителя матрицы третьего порядка нужно вычислить алгебраическую сумму из шести слагаемых, где каждое слагаемое состоит из произведения трех сомножителей;
для нахождения определителя матрицы четвертого порядка нужно вычислить алгебраическую сумму из двадцати четырех слагаемых, где каждое слагаемое состоит из произведения четырех сомножителей и т.
д.
 д.
д.Определить количество слагаемых, для нахождения определителя матрицы, в алгебраической сумме, можно вычислив факториал: 1!=1 2!=1×2=2 3!=1×2×3=6 4!=1×2×3×4=24 5! = 1 × 2 × 3 × 4 × 5 = 120 …
линейная алгебра — Нахождение обратной матрицы
спросил
Изменено 6 лет, 6 месяцев назад
Просмотрено 118 раз
$\begingroup$
У меня есть эти матрицы:
Найдите обратные матрицы:
\begin{bmatrix} 1 & 1 & 0& 0&\dots & 0& 0\\0 & 1 & 1& 0&\dots & 0& 0 \\0 & 0 & 1& 1&\dots & 0& 0 \\\dots & \dots & \dots& \dots&\ точки & \dots& \dots\\0 & 0 & 0& 0&\dots & 1& 1 \\0 & 0 & 0& 0&\dots & 0& 1 \\ \end{bmatrix} 9{n-2} \\\dots & \dots & \dots& \dots&\dots & \dots& \dots\\0 & 0 & 0& 0&\dots & 1& a \\0 & 0 & 0& 0&\dots & 0& 1 \\ \end{bmatrix}
Это примеры экзаменационных задач, с которыми я скоро столкнусь. Я хочу понять, как решать такие задачи
Я хочу понять, как решать такие задачи
PS Я новичок в математике и не могу найти лучшего ресурса, если вы можете дать мне ссылку на хороший источник по линейной алгебре, это было бы здорово.
- линейная алгебра 9{-1}$.
Пример 1: $$ \левый[ \begin{массив}{рррр|рррр} 1 и 1 и 0 и 0 и 1 и 0 и 0 и 0 \\ 0 и 1 и 1 и 0 и 0 и 1 и 0 и 0 \\ 0 и 0 и 1 и 1 и 0 и 0 и 1 и 0 \\ 0 и 0 и 0 и 1 и 0 и 0 и 0 и 1 \конец{массив} \верно] \к \левый[ \begin{массив}{рррр|рррр} 1 и 1 и 0 и 0 и 1 и 0 и 0 и 0 \\ 0 и 1 и 1 и 0 и 0 и 1 и 0 и 0 \\ 0 и 0 и 1 и 0 и 0 и 0 и 1 и -1 \\ 0 и 0 и 0 и 1 и 0 и 0 и 0 и 1 \конец{массив} \верно] \к \\ \левый[ \begin{массив}{рррр|рррр} 1 и 1 и 0 и 0 и 1 и 0 и 0 и 0 \\ 0 и 1 и 0 и 0 и 0 и 1 и -1 и 1 \\ 0 и 0 и 1 и 0 и 0 и 0 и 1 и -1 \\ 0 и 0 и 0 и 1 и 0 и 0 и 0 и 1 \конец{массив} \верно] \к \левый[ \begin{массив}{рррр|рррр} 1 и 0 и 0 и 0 и 1 и -1 и 1 и -1 \\ 0 и 1 и 0 и 0 и 0 и 1 и -1 и 1 \\ 0 и 0 и 1 и 0 и 0 и 0 и 1 и -1 \\ 0 и 0 и 0 и 1 и 0 и 0 и 0 и 1 \конец{массив} \верно] $$ Здесь лучше всего начинать с последнего ряда и двигаться вверх.
92 и 0 \\
0 & 1 & 0 & 0 & 0 & 1 & -a & 0 \\
0 и 0 и 1 и 0 и 0 и 0 и 1 и -а \\
0 и 0 и 0 и 1 и 0 и 0 и 0 и 1
\конец{массив}
\верно]
\к
\левый[
\begin{массив}{рррр|рррр}
1 & 0 & 0 & 0 & 1 & -a & 0 & 0 \\
0 & 1 & 0 & 0 & 0 & 1 & -a & 0 \\
0 и 0 и 1 и 0 и 0 и 0 и 1 и -а \\
0 и 0 и 0 и 1 и 0 и 0 и 0 и 1
\конец{массив}
\верно]
$$$\endgroup$
2
$\begingroup$
Используя обычный алгоритм, вы можете вычислить, что $$\begin{pmatrix} 1&1&0&0&\середина&1&0&0&0\\ 0&1&1&0&\середина&0&1&0&0\\ 0&0&1&1&\середина&0&0&1&0\\ 0&0&0&1&\середина&0&0&0&1 \end{pmatrix}\xrightarrow{R_3\rightarrow R_3-R_4}\begin{pmatrix} 1&1&0&0&\середина&1&0&0&0\\ 0&1&1&0&\середина&0&1&0&0\\ 0&0&1&0&\середина&0&0&1&-1\\ 0&0&0&1&\середина&0&0&0&1 \end{pmatrix}\\ \xrightarrow{R_2\rightarrow R_2-R_3} \begin{pmatrix} 1&1&0&0&\середина&1&0&0&0\\ 0&1&0&0&\середина&0&1&-1&1\\ 0&0&1&0&\середина&0&0&1&-1\\ 0&0&0&1&\середина&0&0&0&1 \end{pmatrix}\\ \xrightarrow{R_1\rightarrow R_1-R_2} \begin{pmatrix} 1&0&0&0&\середина&1&-1&1&-1\\ 0&1&0&0&\середина&0&1&-1&1\\ 0&0&1&0&\середина&0&0&1&-1\\ 0&0&0&1&\середина&0&0&0&1 \end{pmatrix}.
2$-норма. Критерий остановки обычно $\|Ax — y\| < \varepsilon \|y\|$ с небольшим $\varepsilon$. 9\infty$?- линейная-алгебра
- na.численный-анализ
- oc.оптимизация-и-управление
- выпуклая-оптимизация
$\endgroup$
$\begingroup$
Один из подходов заключается в решении задачи оптимизации: \begin{уравнение*} \min_x\quad \|Ax-y\|_\infty. \end{уравнение*} Это задача негладкой оптимизации, но она поддается множеству методов масштабируемой оптимизации, например, гладкой минимизации негладких функций по Нестерову. Конечно, приведенную выше задачу также можно представить в виде линейной программы и, таким образом, решить более точно с помощью методов внутренних точек.
Однако , если вы имели в виду, что хотите минимизировать $\|Ax-y\|_2$, при этом гарантируя, что $\|Ax-y\|_\infty \le \delta\|y\|_\ infty$, то у вас в руках конусная программа второго порядка, для которой есть методы внутренних точек, а также другие более масштабируемые методы.
$\endgroup$
2
$\begingroup$
В дополнение к ответу Суврита из главы 6 Boyd & Vandenberghe:
$\endgroup$
$\begingroup$
В качестве бесстыдной затычки для моей собственной работы: Поскольку вы хотите использовать $\infty$-норму в качестве критерия остановки, вас могут заинтересовать гомотопические методы. Для полноты предположим, что вы хотите найти разреженных приближенных решений $Ax=b$. Вы устанавливаете допуск $\delta= \|b\|_\infty$ и видите, что $x_\delta = 0$ — это самый разреженный $x$, который решает $Ax=b$ с точностью до допуска $\delta$ (в $\infty$-норма). Гомотопический метод начинает с этих $x_\delta$ и $\delta$ и уменьшает значение $\delta$, сохраняя при этом $x_\delta$ решением (в данном случае) $$ \min_x \|x\|_1\quad\text{s.
 92 и 0 \\
0 & 1 & 0 & 0 & 0 & 1 & -a & 0 \\
0 и 0 и 1 и 0 и 0 и 0 и 1 и -а \\
0 и 0 и 0 и 1 и 0 и 0 и 0 и 1
\конец{массив}
\верно]
\к
\левый[
\begin{массив}{рррр|рррр}
1 & 0 & 0 & 0 & 1 & -a & 0 & 0 \\
0 & 1 & 0 & 0 & 0 & 1 & -a & 0 \\
0 и 0 и 1 и 0 и 0 и 0 и 1 и -а \\
0 и 0 и 0 и 1 и 0 и 0 и 0 и 1
\конец{массив}
\верно]
$$
92 и 0 \\
0 & 1 & 0 & 0 & 0 & 1 & -a & 0 \\
0 и 0 и 1 и 0 и 0 и 0 и 1 и -а \\
0 и 0 и 0 и 1 и 0 и 0 и 0 и 1
\конец{массив}
\верно]
\к
\левый[
\begin{массив}{рррр|рррр}
1 & 0 & 0 & 0 & 1 & -a & 0 & 0 \\
0 & 1 & 0 & 0 & 0 & 1 & -a & 0 \\
0 и 0 и 1 и 0 и 0 и 0 и 1 и -а \\
0 и 0 и 0 и 1 и 0 и 0 и 0 и 1
\конец{массив}
\верно]
$$ 2$-норма. Критерий остановки обычно $\|Ax — y\| < \varepsilon \|y\|$ с небольшим $\varepsilon$. 9\infty$?
2$-норма. Критерий остановки обычно $\|Ax — y\| < \varepsilon \|y\|$ с небольшим $\varepsilon$. 9\infty$?