
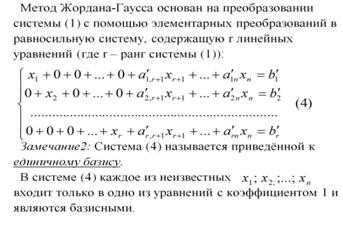
3.3. Общее, базисное и частное решение систем линейных алгебраических уравнений.
Пусть переменныхназываются основными (или базисными), если определитель матрицы из коэффициентов при них (т.е. базисный минор) отличен от нуля. Остальныепеременных называются неосновными (или свободными). Каждому разбиению переменных на основные и неосновные соответствует одно базисное решение, а число способов разбиения не превосходит числа сочетанийто и базисных решений имеется не более
Совместная система линейных уравнений спеременнымиимеет бесконечное множество решений, среди которых базисных решений конечное число, не превосходящее
Достоинства метода Гаусса по сравнению с другими:
— менее трудоемкий метод;
— позволяет однозначно установить, совместна система или нет и в случае совместности найти ее решение;
— дает возможность найти максимальное число линейно независимых уравнений – ранг матрицы системы.
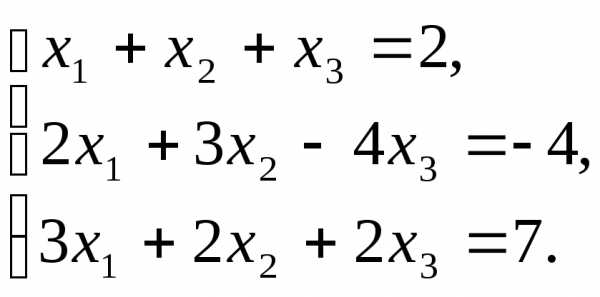
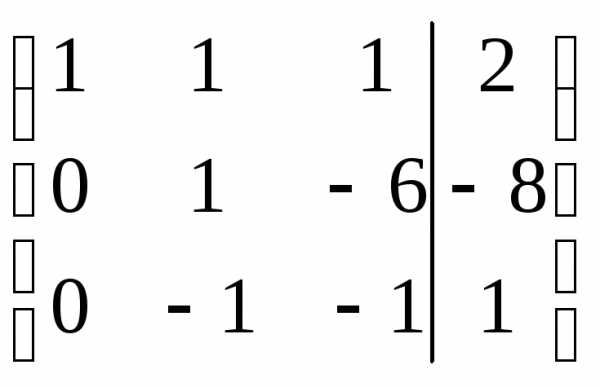
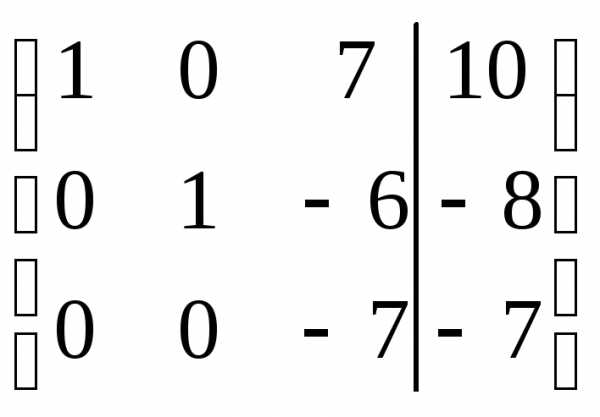
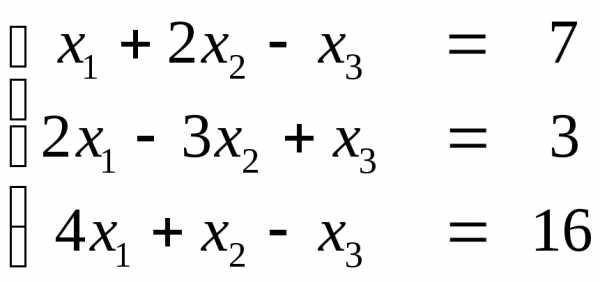
Рассмотрим пример. Найти решение системы линейных алгебраических уравнений
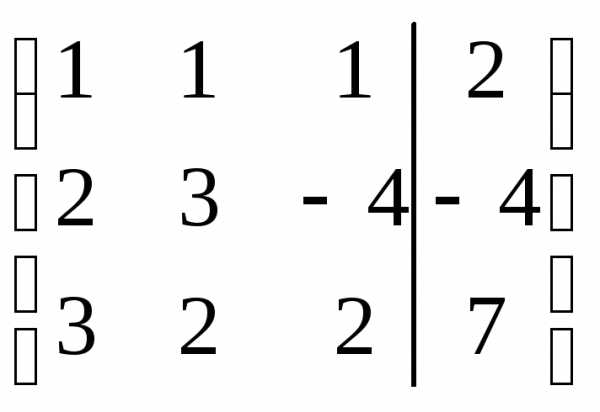
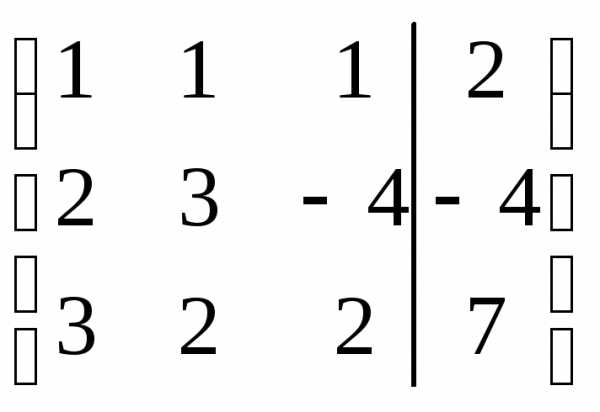
Составим расширенную матрицу по данной системе
поменяем местами первую и вторую строку
умножим первую строку на и сложим со второй строкой; умножим первую строку наи сложим с третьей строкой
умножим вторую строку на и сложим с третьей строкой
последняя строка вычеркивается, так как все ее элементы равны нулю
Ранг основной матрицы ранг расширенной матрицыследовательно, система совместна. Число строк в основной матрицечисло столбцов в основной матрицеследовательно, система имеет множество решений.
Выявим базисные переменные
следовательно, базисные переменные, тогда
3.4. Однородные системы линейных алгебраических уравнений
Система линейных уравнений спеременными называетсясистемой линейных однородных уравнений, если все их свободные члены равны нулю.
Системы линейных однородных уравнений:
Система линейных однородных уравнений всегда совместна, так как имеет, по крайней мере, нулевое решение
Если в однородной системе а ее определитель отличен от нуля, то такая система имеет только нулевое решение.
Система линейных однородных уравнений имеет ненулевое решение тогда и только тогда, когда ранг ее матрицы коэффициентов при переменных меньше числа переменных, т.е. при
Рассмотрим пример. Найти решение системы линейных алгебраических уравнений
поменяем местами первую и третью строки
умножим первую строку на и сложим со второй строкой, а затем с третьей строкой, получим
умножим вторую строку на и сложим с третьей строкой
разделим последнюю строку на
Таким образом, ранг расширенной матрицы и ранг основной матрицы равны следовательно, система совместна. Число строк в основной матрице равно 3, а число столбцов равно 4, т.е. решений множество. Определим базисные переменные
базисные переменные.
Перейдем от матрицы к системе, выразим переменные через другие переменные
Контрольные вопросы
Сформулировать теорему Кронекера – Капелли.
Сформулировать Метод Гаусса решения систем m линейных уравнений с n неизвестными.
Дать определение базисному решению систем линейных алгебраических уравнений.
Какие системы линейных алгебраических уравнений называют однородными?
Лекция №4. Векторы
4.1. Векторы в науке и технике. Понятие вектора. Координаты вектора.
4.2. Линейные операции над векторами.
4.3. Декартова система координат. Базис векторного пространства.
4.4. Скалярное произведение векторов, основные свойства и выражение в координатной форме.
4.5. Векторное произведение векторов. Основные свойства векторного произведения векторов и выражение в координатной форме.
4.6. Применение векторного произведения векторов к решению задач.
4.7. Смешанное произведение векторов. Основные свойства смешанного произведения векторов и выражение в координатной форме.
4.8. Применение смешанного произведения векторов к решению задач.
Векторы в науке и технике. Понятие вектора. Координаты вектора
В физике и математике вектор – это величина, которая характеризуется численным значением и направлением. В физике встречается немало важных величин, которые характеризуются направлением. Например, сила, скорость, ускорение, вращающий момент, импульс, напряженность электрического и магнитного полей. Их можно противопоставить другим величинам, таким как масса, объем, давление, температура, плотность, которые можно описать обычным числом и называются они скалярными величинами.
Векторная запись используется при работе с величинами, которые невозможно задать полностью с помощью обычных чисел. Например, необходимо описать положение предмета, но полностью определить местоположение предмета невозможно, пока не будет известно направление, в котором он находится. Таким образом, местонахождение предмета характеризуется численным значением (расстоянием в километрах) и направлением.
При изучении и расчете цепей переменного тока удобно пользоваться векторными диаграммами, на которых синусоидальные напряжения и токи условно изображают с помощью векторов. Применение этих диаграмм упрощает изучение и расчет цепей и вносит наглядность в рассматриваемые соотношения.
Вектором на плоскости называется направленный отрезок с начальной точкой и конечной точкойкоторый можно перемещать параллельно самому себе.
Рис. 1
Вектор на плоскости
От любой точки можно отложить вектор, равный данному, и притом только один, используя параллельный перенос. При параллельном переносе точки смещаются по параллельным или совпадающим прямым на одно и тоже расстояние.
Нулевой вектор – точка в пространстве. Начало и конец нулевого вектора совпадают, и он не имеет длины и направления.
Абсолютной величиной или модулем вектора называется длина отрезка, изображающего вектор. Другими словами длина вектора есть расстояние между началом и концом вектора
Векторы называются коллинеарными, если они расположены на одной или на параллельных прямых. Нулевой вектор коллинеарен любому вектору. Если векторы иколлинеарны и их лучи сонаправлены, то векторыиназываютсонаправленными. Обозначают Если векторыиколлинеарны, а их лучи не являются сонаправленными, то векторы называютпротивоположно направленными. Обозначают Нулевой вектор условились считать сонаправленным с любым вектором.
Рис.2
Коллинеарные вектора
Свойство коллинеарных векторов.
Если векторы иколлинеарны и, то существует числотакое, что. Причем, еслито векторыисонаправленные, еслито противоположно направленные.
Векторы называются компланарными, если при откладывании их от одной и той же точки они будут лежать в одной плоскости. Любые два вектора компланарны. Коллинеарные векторы всегда компланарны, но не все компланарные векторы коллинеарны.
Признак компланарности трех векторов.
Если вектор можно разложить по векторами, т.е. представить в виде, где-некоторые числа, то векторы-компланарны.
Рис.3
Компланарные вектора
, где ;
, где
, где
17 Системы линейных уравнений
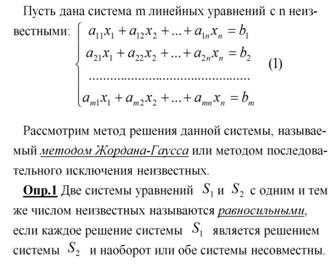
§1. Системы линейных уравнений.
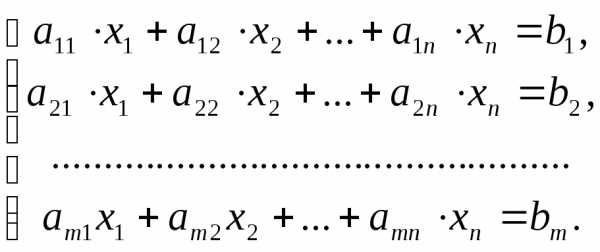
Система вида
 (1)
(1)
называется системой mлинейных уравнений сnнеизвестными.
Здесь  — неизвестные,
— неизвестные, — коэффициенты при неизвестных,
— коэффициенты при неизвестных, — свободные члены уравнений.
— свободные члены уравнений.
Если все свободные члены уравнений равны нулю, система называется однородной.
Решениемсистемы называется совокупность чисел ,
при подстановке которых в систему вместо
неизвестных все уравнения обращаются
в тождества. Система называетсясовместной, если она имеет хотя бы
одно решение. Совместная система, имеющая
единственное решение, называетсяопределенной. Две системы называютсяэквивалентными, если множества их
решений совпадают.
,
при подстановке которых в систему вместо
неизвестных все уравнения обращаются
в тождества. Система называетсясовместной, если она имеет хотя бы
одно решение. Совместная система, имеющая
единственное решение, называетсяопределенной. Две системы называютсяэквивалентными, если множества их
решений совпадают.Система (1) может быть представлена в матричной форме с помощью уравнения
(2)
где
.
§2. Совместность систем линейных уравнений.
Назовем расширенной матрицей системы (1) матрицу
Теорема Кронекера — Капелли. Система (1) совместна тогда и только тогда, когда ранг матрицы системы равен рангу расширенной матрицы:
.
§3. Решение систем n линейных уравнений с n неизвестными.
Рассмотрим неоднородную систему nлинейных уравнений сnнеизвестными:
 (3)
(3)
Теорема Крамера. Если главный
определитель системы (3) ,
то система имеет единственное решение,
определяемое по формулам:
,
то система имеет единственное решение,
определяемое по формулам:
т.е. ,
где  — определитель, получаемый из определителя
— определитель, получаемый из определителя заменой
заменой -го
столбца на столбец свободных членов.
-го
столбца на столбец свободных членов.
Если  ,
а хотя бы один из
,
а хотя бы один из ≠0,
то система решений не имеет.
≠0,
то система решений не имеет.
Если , то система имеет бесконечно много решений.
Систему (3) можно решить, используя ее
матричную форму записи (2). Если ранг
матрицы Аравенn,
т.е.,
то матрицаАимеет обратную .
Умножив матричное уравнениена матрицу
.
Умножив матричное уравнениена матрицу слева, получим:
слева, получим:
 .
.
Последнее равенство выражает способ решения систем линейных уравнений с помощью обратной матрицы.
Пример. Решить систему уравнений с помощью обратной матрицы.
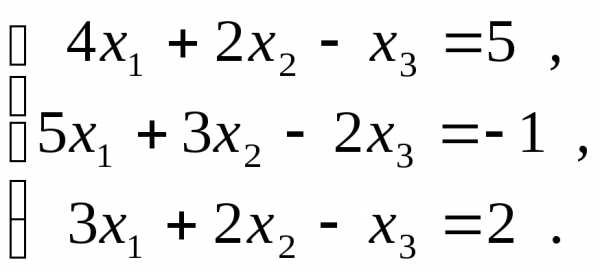
Решение. Матрица невырожденная, так как
невырожденная, так как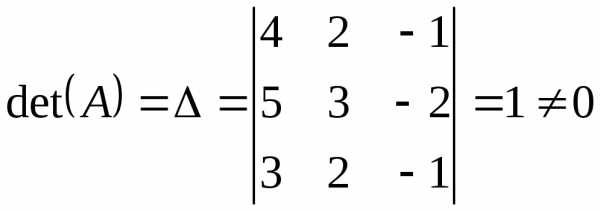 ,
значит, существует обратная матрица.
Вычислим обратную матрицу:
,
значит, существует обратная матрица.
Вычислим обратную матрицу: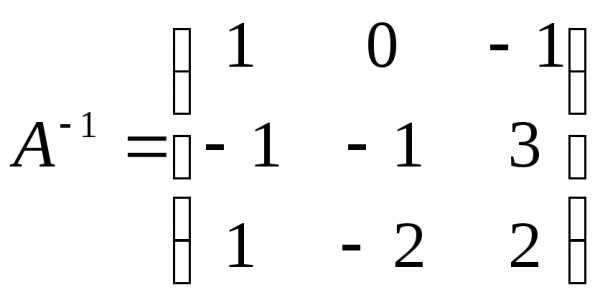 .
.
Тогда
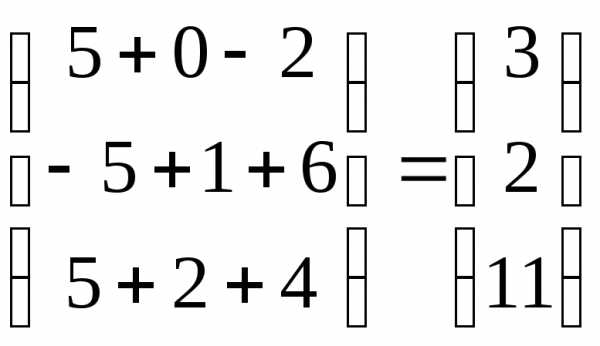 ,
,
т.е. .
Задание. Решить систему методом Крамера.
§4. Решение произвольных систем линейных уравнений.
Пусть дана неоднородная система линейных уравнений вида (1).
Предположим, что система совместна,
т.е. выполнено условие теоремы
Кронекера-Капелли:
.
Если ранг матрицы (числу неизвестных), то система имеет
единственное решение. Если
(числу неизвестных), то система имеет
единственное решение. Если ,
то система имеет бесконечно много
решений. Поясним.
,
то система имеет бесконечно много
решений. Поясним.
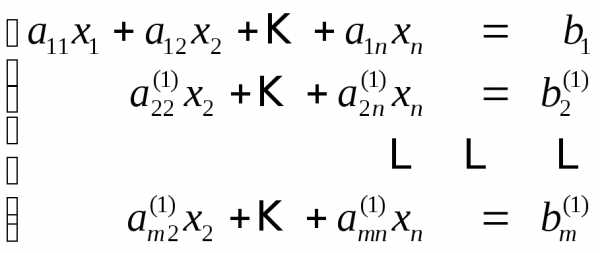
Пусть ранг матрицы r(A)=r<n. Поскольку, то существует некоторый ненулевой минор порядкаr. Назовем его базисным минором. Неизвестные, коэффициенты которых образуют базисный минор, назовем базисными переменными. Остальные неизвестные назовем свободными переменными. Переставим уравнения и перенумеруем переменные так, чтобы этот минор располагался в левом верхнем углу матрицы системы:
 .
.
Первые rстрок линейно независимы, остальные выражаются через них. Следовательно, эти строки (уравнения) можно отбросить. Получим:
Дадим свободным переменным произвольные числовые значения: . Оставим в левой части только базисные переменные, свободные перенесем в правую часть.

Получили систему rлинейных уравнений сrнеизвестными, определитель которой отличен от 0. Она имеет единственное решение.
Эта система называется общим решением
системы линейных уравнений (1). Иначе:
выражение базисных переменных через
свободные называется общим решениемсистемы. Из него можно получить бесконечное
множествочастных решений, придавая
свободным переменным произвольные
значения. Частное решение, полученное
из общего при нулевых значениях свободных
переменных называетсябазисным
решением. Число различных базисных
решений не превосходит .
Базисное решение с неотрицательными
компонентами называетсяопорнымрешением системы.
.
Базисное решение с неотрицательными
компонентами называетсяопорнымрешением системы.
Пример.
 ,r=2.
,r=2.
Переменные  — базисные,
— базисные, — свободные.
— свободные.
Сложим уравнения; выразим  через
через :
:
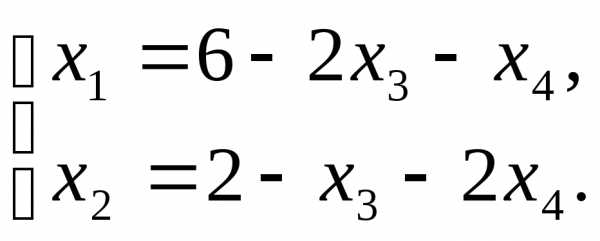 — общее решение.
— общее решение.
— частное решение при.
— базисное решение, опорное.
§5. Метод Гаусса.
Метод Гаусса — это универсальный метод исследования и решения произвольных систем линейных уравнений. Он состоит в приведении системы к диагональному (или треугольному) виду путем последовательного исключения неизвестных с помощью элементарных преобразований, не нарушающих эквивалентности систем. Переменная считается исключенной, если она содержится только в одном уравнении системы с коэффициентом 1.
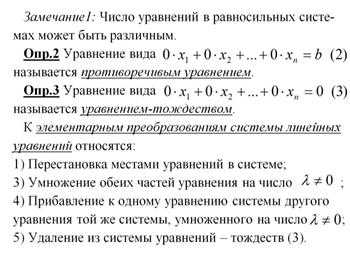
Элементарными преобразованиямисистемы являются:
— умножение уравнения на число, отличное от нуля;
— сложение уравнения, умноженного на любое число, с другим уравнением;
— перестановка уравнений;
— отбрасывание уравнения 0 = 0.
Элементарные преобразования можно совершать не над уравнениями, а над расширенными матрицами получающихся эквивалентных систем.
Пример.
Решение.Выпишем расширенную матрицу системы:
 .
.
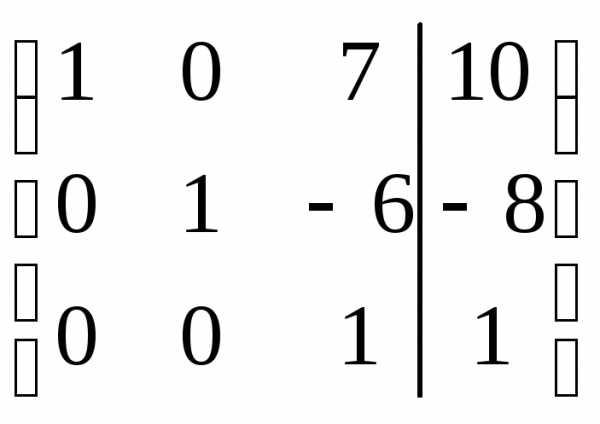
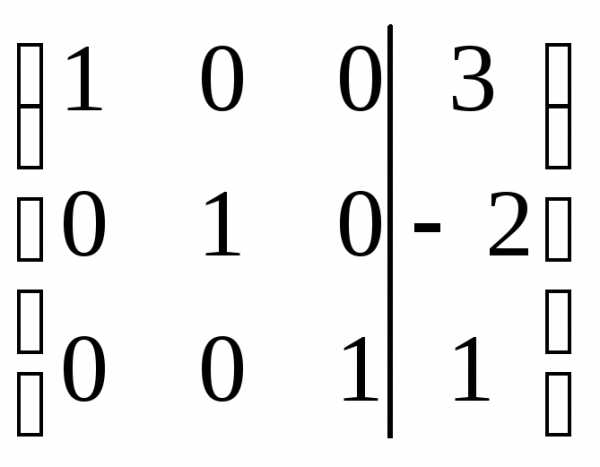
Выполняя элементарные преобразования, приведем левую часть матрицы к единичному виду: на главной диагонали будем создавать единицы, а вне ее — нули.
Замечание. Если при выполнении
элементарных преобразований получено
уравнение вида 0= к (где к 0), то система несовместна.
0), то система несовместна.
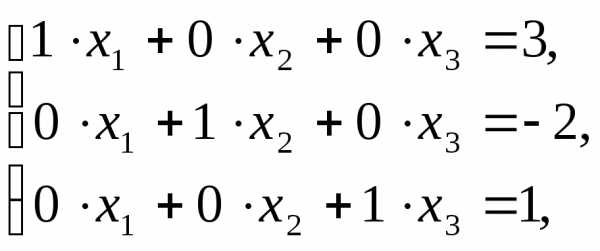
Решение систем линейных уравнений методом последовательного исключения неизвестных можно оформлять в виде таблицы.
Левый столбец таблицы содержит информацию об исключенных (базисных) переменных. Остальные столбцы содержат коэффициенты при неизвестных и свободные члены уравнений.
В исходную таблицу записывают расширенную матрицу системы. Далее приступают к выполнению преобразований Жордана:
1. Выбирают переменную  ,
которая станет базисной. Соответствующий
столбец называют ключевым. Выбирают
уравнение, в котором эта переменная
останется, будучи исключенной из других
уравнений. Соответствующую строку
таблицы называют ключевой. Коэффициент
,
которая станет базисной. Соответствующий
столбец называют ключевым. Выбирают
уравнение, в котором эта переменная
останется, будучи исключенной из других
уравнений. Соответствующую строку
таблицы называют ключевой. Коэффициент ,
стоящий на пересечении ключевой строки
и ключевого столбца, называют ключевым.
,
стоящий на пересечении ключевой строки
и ключевого столбца, называют ключевым.
2. Элементы ключевой строки делят на ключевой элемент.
3. Ключевой столбец заполняют нулями.
4. Остальные элементы вычисляют по правилу прямоугольника. Составляют прямоугольник, в противоположных вершинах которого находятся ключевой элемент и пересчитываемый элемент; из произведения элементов, стоящих на диагонали прямоугольника с ключевым элементом, вычитают произведение элементов другой диагонали, полученную разность делят на ключевой элемент.
Пример. Найти общее решение и базисное решение системы уравнений:
Решение.
Базис | | | | | | |
| 2 -1 -3 | 1 1 0 | -2 1 2 | 1 0 0 | -9 -2 2 | 4 4 2 |
| 3 -1 -3 | 0 1 0 | -3 1 2 | 1 0 0 | -7 -2 2 | 0 4 2 |
| -1,5 0,5 -1,5 | 0 1 0 | 0 0 1 | 1 0 0 | -4 -3 1 | 3 3 1 |
Общее решение системы :
Базисное решение: .
Перейти от одного базиса системы к другому позволяет преобразование однократного замещения: вместо одной из основных переменных в базис вводят одну из свободных переменных. Для этого в столбце свободной переменной выбирают ключевой элемент и выполняют преобразования по указанному выше алгоритму.
§6. Нахождение опорных решений
Опорным решением системы линейных уравнений называется базисное решение, не содержащее отрицательных компонент.
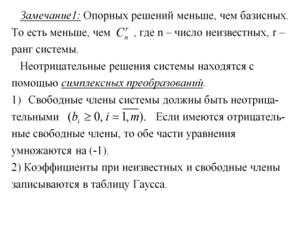
Опорные решения системы находят методом Гаусса при выполнении следующих условий.
1. В исходной системе все свободные члены
должны быть неотрицательны:  .
.
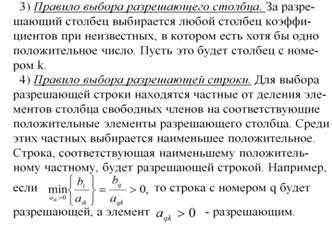
2. Ключевой элемент выбирают среди положительных коэффициентов.
3. Если при переменной, вводимой в базис, имеется несколько положительных коэффициентов, то в качестве ключевой строки берется та, в которой отношение свободного члена к положительному коэффициенту будет наименьшим.
Замечание 1. Если в процессе исключения
неизвестных появится уравнение, в
котором все коэффициенты неположительны,
а свободный член ,
то система не имеет неотрицательных
решений.
,
то система не имеет неотрицательных
решений.
Замечание 2. Если в столбцах коэффициентов при свободных переменных нет ни одного положительного элемента, то переход к другому опорному решению невозможен.
Пример.
базис | | | | | | | | |
| 11 -6 -8 | 4 -1 -3 | -39 11 29 | 3 -5 -5 | 0 1 0 | -1 1 1 | 0 15 1 | min |
| 3 2 -8 | 1 2 -3 | -10 -18 29 | -2 0 -5 | 0 1 0 | 0 0 1 | 1 14 1 | min |
| 3 -4 1 | 1 0 0 | -10 2 -1 | -2 4 -11 | 0 1 0 | 0 0 1 | 1 12 4 | min ; |
| 1 0 0 | | | | 0 1 0 | 0 0 1 | | . |
 ;
;
 ;
;
 ;
;
 ;
;
studfiles.net
Частные случаи решения систем линейных уравнений
Системы уравнения решаются графически. Однако такой способ решения оказывается неудобным: если точка пересечения графиков значительно удалена от начала координат. Кроме того, при графическом способе не может быть обеспечена большая точность результата. Поэтому применяют и другие методы решения.
Чаще всего для решения предлагаются такие системы линейных уравнений, в которых коэффициенты при переменных отличны от нуля. В этом случае систему необходимо преобразовать так, чтобы хотя бы в одном из уравнений коэффициент при какой-либо переменной стал равен нулю. Если коэффициент при переменной в одном из уравнений системы двух линейных уравнений равен нулю, такую систему легко решить без построения графиков.
Рассмотрим примеры решения систем уравнений с двумя переменными.
Пример 1.
Решим систему
{3х – 7у = 2,
{2х + 0у = 20.
Решение.
Уравнению 2х + 0у = 20 удовлетворяет любая пара значений переменных х и у вида (10; n), где n – любое число, и никакая другая пара.
Из множества пар вида (10; n) выделим те, которые удовлетворяют первому уравнению системы. Для этого в уравнение 3х – 7у = 2 вместо х подставим 10. Получим 3 × 10 – 7у = 2. Отсуда, у = 4. Следовательно, пара чисел (10; 4) удовлетворяет как первому, так и второму уравнению системы, то есть является решением данной системы, и притом единственным.
Пример 2.
Решим систему:
{3х = -12,
{х + у = 1.
Решение.
Первое уравнение содержит только одну переменную х и обращается в истинное равенство при х = -4.
Как известно, решением системы уравнений с двумя переменными служит пара чисел. Можно ли говорить, что первому уравнению удовлетворяет пара вида (-4; n), если в нём отсутствует переменная у?
Если условиться, что уравнение 3х = -12, входящие в данную систему, есть сокращённая запись уравнения 3х + 0у = -12, то ему будет удовлетворять любая пара значений х и у вида (-4; n), где n – какое угодно число. Подставив значение х = -4 во второе уравнение системы, найдём, что у = 5. Следовательно, пара чисел (-4; 5) является решением данной системы уравнений.
© blog.tutoronline.ru, при полном или частичном копировании материала ссылка на первоисточник обязательна.
blog.tutoronline.ru
27. Однородные системы линейных уравнений. Свойства их решений. Общее решение ослу.
Однородная система линейных уравнений
или
всегда совместна, так как имеет тривиальное решение . Если ранг матрицы системы равен количеству неизвестных, то тривиальное решение единственное. Предположим, что. Тогда однородная система имеет бесконечно много решений. Заметим, что расширенная матрицаоднородной системы при элементарных преобразованиях строк приводится к упрощенному виду, т.е.. Поэтому из (5.11) получаемобщее решение однородной системы уравнений:
Получим другую форму записи решений однородной системы, которая раскрывает структуру множества решений. Для этого подчеркнем следующие свойства.
Свойства решений однородной системы уравнений
1. Если столбцы — решения однородной системы уравнений, то любая их линейная комбинациятакже является решением однородной системы.
В самом деле, из равенств следует, что
т.е. линейная комбинация решений является решением однородной системы.
2. Если ранг матрицы однородной системы равен , то система имеетлинейно независимых решений.
Действительно, по формулам (5.13) общего решения однородной системы найдем частных решений, придавая свободным переменным следующиестандартные наборы значений (всякий раз полагая, что одна из свободных переменных равна единице, а остальные — равны нулю):
Получим решений
которые линейно независимы. В самом деле, если из этих столбцов составить матрицу, то последние ее строк образуют единичную матрицу. Следовательно, минор, расположенный в последних строках не равен нулю (он равен единице), т.е. является базисным. Поэтому ранг матрицы будет равен . Значит, все столбцы этой матрицы линейно независимы (см. теорему 3.4).
Любая совокупность линейно независимых решенийоднородной системы называетсяфундаментальной системой (совокупностью) решений.
Заметим, что фундаментальная система решений определяется неоднозначно. Однородная система может иметь разные фундаментальные системы решений, состоящие из одного и того же количества линейно независимых решений.
Теорема 5.3 об общем решении однородной системы. Если — фундаментальная система решений однородной системы уравнений (5.4), то столбец
при любых значениях произвольных постоянных также является решением системы (5.4), и, наоборот, для каждого решения х этой системы найдутся такие значения произвольных постоянных, при которых это решениеудовлетворяет равенству (5.14).
Прямое утверждение теоремы следует из свойства 1 решений однородной системы. Докажем обратное утверждение о том, что любое решение можно представить в виде (5.14). Для этого составим матрицу, приписав к столбцам фундаментальной системы решений столбец
Найдем ранг этой матрицы. Так как первые столбцов линейно независимы, то. Так как каждый из столбцов матрицыявляется решением системы, то по первой формуле из (5.13) получаем
Следовательно, первая строка матрицы является линейной комбинацией последнихстрок этой матрицы.
По второй формуле из (5.13) получим, что вторая строка матрицы является линейной комбинацией последнихстрок этой матрицы, и т.д. По r-й формуле из (5.13) получим, что r-я строка матрицыявляется линейной комбинацией последнихстрок этой матрицы. Значит, первыестрок матрицыможно вычеркнуть и при этом ранг матрицы не изменится. Следовательно,, так как после вычеркивания в матрицебудет всегострок. Таким образом,. Значит, есть базисный минор матрицы, который расположен в первыхее столбцах, а столбецне входит в этот базисный минор. Тогда по теореме о базисном миноре найдутся такие числа, чтоИтак, обратное утверждение доказано.
studfiles.net
Решение однородных систем линейных уравнений
Однородная
система
всегда совместна и имеет тривиальное
решение .
Для существования нетривиального
решения необходимо, чтобы ранг матрицы
.
Для существования нетривиального
решения необходимо, чтобы ранг матрицы был меньше числа неизвестных:
был меньше числа неизвестных:
.
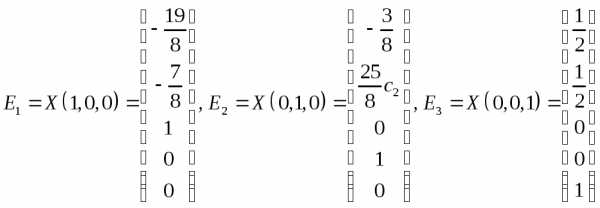
Фундаментальной системой решений однородной системы называют систему решений в виде векторов-столбцов, которые соответствуют каноническому базису, т.е. базису, в котором произвольные постоянныепоочередно полагаются равными единице, тогда как остальные приравниваются нулю.
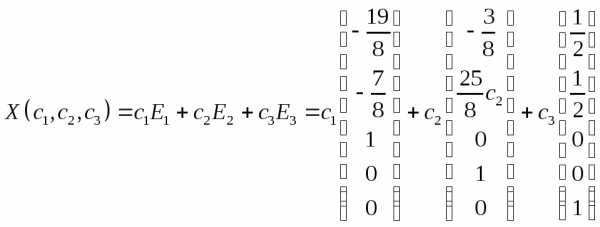
Тогда общее решение однородной системы имеет вид:
,
где — произвольные постоянные. Другими словами, общее решение есть линейная комбинация фундаментальной системы решений.
Таким образом, базисные решения могут быть получены из общего решения, если свободным неизвестным поочередно придавать значение единицы, полагая все остальные равные нулю.
Пример. Найдем решение системы
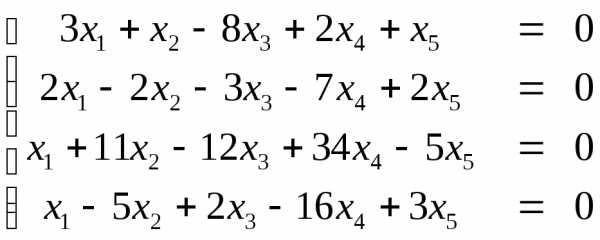
Примем , тогда получим решение в виде:
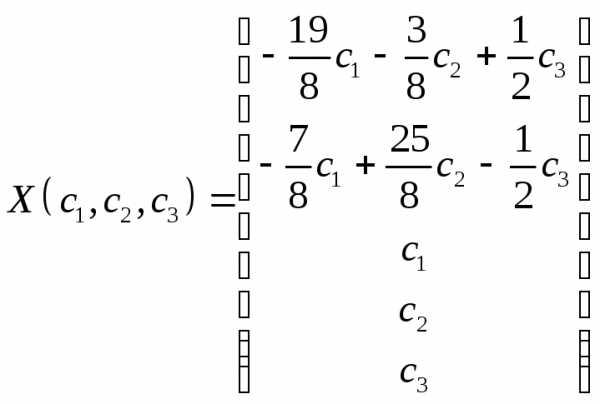
Построим теперь фундаментальную систему решений:
 .
.
Общее решение запишется в виде:
Решения системы однородных линейных уравнений имеют свойства:
Если
 — решение системы, то и— также решение.
— решение системы, то и— также решение.Если
и— решения системы, то и- также решение.
 — решение системы, то и
— решение системы, то и — также решение.
— также решение. и
и — решения системы, то и- также решение.
— решения системы, то и- также решение.Другими словами, любая линейная комбинация решений однородной системы есть опять решение.
Решение систем линейных уравнений методом Гаусса
Решение систем линейных уравнений интересует математиков несколько столетий. Первые результаты были получены в XVIII веке. В 1750 г. Г.Крамер (1704 –1752) опубликовал свои труды по детерминантам квадратных матриц и предложил алгоритм нахождения обратной матрицы. В 1809 г. Гаусс изложил новый метод решения, известный как метод исключения.
Метод Гаусса, или метод последовательного исключения неизвестных, заключается в том, что с помощью элементарных преобразований система уравнений приводится к равносильной системе ступенчатого (или треугольного) вида. Такие системы позволяют последовательно находить все неизвестные в определенном порядке.
Предположим,
что в системе (1)  (что всегда возможно).
(что всегда возможно).
 (1)
(1)
Умножая поочередно первое уравнение на так называемые подходящие числа
и складывая результат умножения с соответствующими уравнениями системы, мы получим эквивалентную систему, в которой во всех уравнениях, кроме первого, будет отсутствовать неизвестная х1
 (2)
(2)
Умножим
теперь второе уравнение системы (2) на
подходящие числа, полагая, что 
,
и
складывая его с нижестоящими, исключим
переменную  из всех уравнений, начиная с третьего.
из всех уравнений, начиная с третьего.
Продолжая
этот процесс, после  шага мы получим:
шага мы получим:
(3)
Если
хотя бы одно из чисел
не равно нулю, то соответствующее
равенство противоречиво и система (1)
несовместна. Обратно, для любой совместной
системы числаравны нулю. Число — это ни что иное, как ранг матрицы системы
(1).
— это ни что иное, как ранг матрицы системы
(1).
Переход от системы (1) к (3) называется прямым ходом метода Гаусса, а нахождение неизвестных из (3) – обратным ходом.
Замечание: Преобразования удобнее производить не с самими уравнениями, а с расширенной матрицей системы (1).
Пример. Найдем решение системы
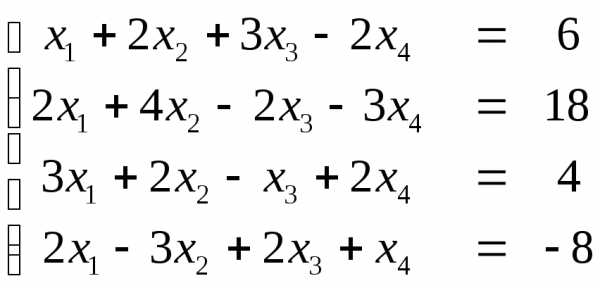 .
.
Запишем расширенную матрицу системы:
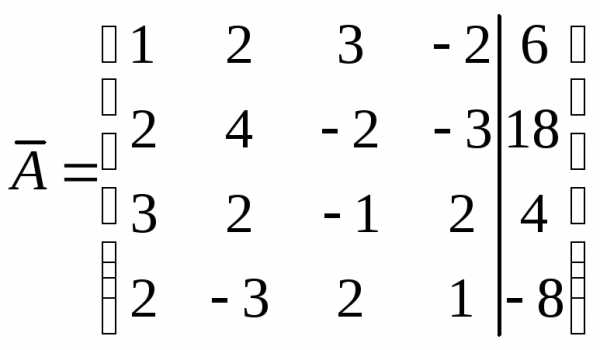 .
.
Прибавим к строкам 2,3,4 первую, умноженную на (-2), (-3), (-2) соответственно:
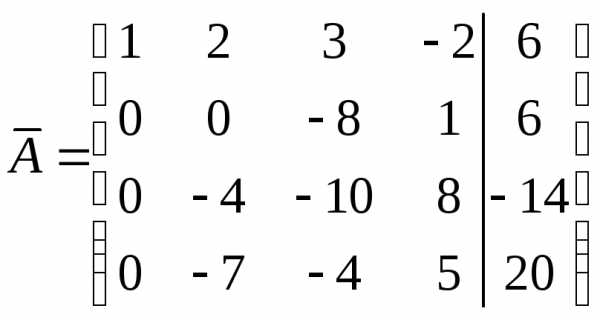 .
.
Поменяем
строки 2 и 3 местами, затем в получившейся
матрице добавим к строке 4 строку 2,
умноженную на  :
:
 .
.
Прибавим
к строке 4 строку 3, умноженную на  :
:
 .
.
Очевидно, что , следовательно, система совместна. Из полученной системы уравнений
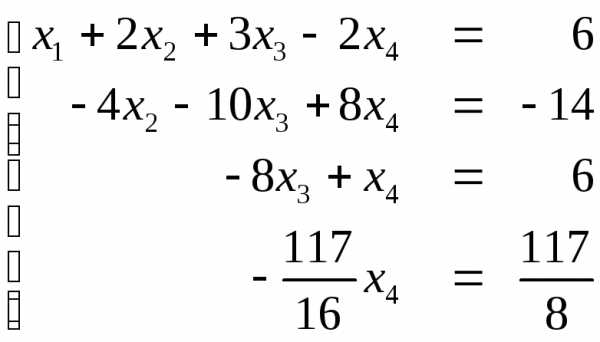
находим решение обратной подстановкой:
 ,
,  ,
, ,
, .
.
Пример 2. Найти решение системы:
 .
.
Очевидно,
что система несовместна, т.к.
,
а .
.
Достоинства метода Гаусса:
Менее трудоемкий, чем метод Крамера.
Однозначно устанавливает совместность системы и позволяет найти решение.
Дает возможность определить ранг любых матриц.
studfiles.net
Произвольные системы m линейных уравнений с n неизвестными. Понятие общего, частного и базисного решений системы уравнений.
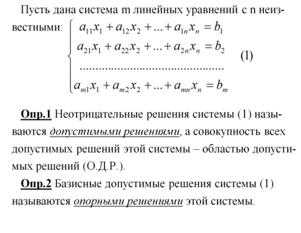
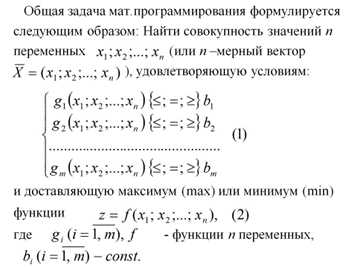
Определение. Система m уравнений с n неизвестными в общем виде записывается следующим образом:
,
где aij – коэффициенты, а bi – постоянные. Решениями системы являются n чисел, которые при подстановке в систему превращают каждое ее уравнение в тождество.
Определение. Если система имеет хотя бы одно решение, то она называется совместной. Если система не имеет ни одного решения, то она называется несовместной.
Определение. Система называется определенной, если она имеет только одно решение и неопределенной, если более одного.
Определение. Для системы линейных уравнений матрица
А = называется матрицей системы, а матрица
А*= называется расширенной матрицей системы
Определение. Если b1, b2, …,bm = 0, то система называется однородной. однородная система всегда совместна, т.к. всегда имеет нулевое решение.
Общим решением разрешенной системы уравнений называется совокупность выражений разрешенных неизвестных через свободные члены и свободные неизвестные:
Частным решением системы уравнений называется решение, получающиеся из общего при конкретных значениях свободных переменных и неизвестных.
Базисным решением называется частное решение, получающееся из общего при нулевых значениях свободных переменных.
- Базисное решение (вектор) называется вырожденным, если число его координат, отличных от нуля, меньше числа разрешенных неизвестных.
- Базисное решение называется невырожденным, если число его координат, отличных от нуля, равно числу разрешенных неизвестных системы, входящих в полный набор.
32.Метод Жордана-Гаусса.
Переход от одного базисного решения к другому. ( не нашел, к сожалению)
Понятия опорного и допустимого решений систем линейных уравнений.
Решение системы m-линейных уравнений с n-неизвестными, в которых значения всех переменных неотрицательны называются допустимыми решениями, а совокупность всех допустимых значений областью допустимых решений. Базисные допустимые решения называются опорными решениями, число которых решений меньше числа базисных.

35.Симплексные преобразования. Теорема о симплексных преобразованиях.
Переход от одного опорного решения к другому.
Общая задача оптимизации.
Типы задач математического программирования: линейное программирование, нелинейное программирование, динамическое программирование.
Оптимизационные задачи, в которых приходится учитывать последовательность действий или фактор времени, рассматриваются в разделе динамического программирования. В отличие от предыдущих задач математического программирования задачи динамического программирования являются многоэтапными или многошаговыми.
cyberpedia.su
Решение систем линейных уравнений
Определение и формула решения систем линейных уравнений
Школьные методы решения систем описаны в статье (\textbf{ссылка на статью «Решение систем уравнений» выше}).
Метод Гаусса для решения систем линейных уравнений
Метод Гаусса — это метод последовательного исключения переменных, когда расширенная матрица системы с помощью элементарных преобразований над ее строками приводится к матрице (системе) треугольного вида, из которой последовательно, начиная с последней, находятся все остальные неизвестные системы. Метод назван в честь немецкого математика, механика, физика, астронома и геодезиста Иоганна Карла Фридриха Гаусса (1777-1855), хотя первое известное описание метода встречается уже в китайском трактате «Математика в девяти книгах» (10-2 в.в. до н.э.).
Метод Крамера для решения систем линейных уравнений
Матричный метод (метод обратной матрицы)
Матричный метод или метод обратной матрицы базируется на следующем алгоритме:
1. Система (1) записывается в матричной форме , где
2. Из матричного уравнения получаем, что
где матрица — это обратная матрица к матрице системы . Обратная матрица находится по формуле:
Матрица называется союзной матрицей к матрице , ее элементами есть алгебраические дополнения к соответствующим элементам матрицы .
Необходимым и достаточным условием применимости матричного метода является неравенство нулю определителя матрицы .
| Понравился сайт? Расскажи друзьям! | |||
ru.solverbook.com