
Практическое занятие №3 Решение систем линейных уравнений. Метод Крамера
Рассмотрим неоднородную систему линейных уравнений п-линейных уравнений с n неизвестными:
(1)
Составим главный определитель из коэффициентов при неизвестных:
а) Если , то система (1) имеет решения, которые находятся по формулам:
,
где определитель получается из главного определителя заменой i-го столбца столбцом свободных членов:
.
б) Если , то система (1) не имеет решений.
Пример 1. Решить систему уравнений:
Решение.
решение существует;
.
Рассмотрим однородную систему линейных уравнений п-линейных уравнений с n неизвестными:
(2)

б) Если , то система (2) имеет бесконечное множество нетривиальных решений.
Пример 2. Решить однородные системы уравнений:
а)
(единственное решение).
б)
система имеет нетривиальное решение.
Уравнение (3) получено суммированием уравнений (1) и (2), поэтому уравнение (3) можно отбросить. Обозначим , получим:
Получим неоднородную систему двух линейных уравнений с двумя неизвестными. Найдем главный определитель:
решение существует.
;
Ответ: .
Выполнить задания:
Решить системы уравнений:
а) | б) |
в) | г) |
д) | е) |
ж) |
Обратная матрица. Решение систем линейных уравнений
матричными способом. Матричные уравнения
Решение систем линейных уравнений
матричными способом. Матричные уравнения
Пусть А – квадратная матрица -го порядка
.
Квадратная матрица А называется невырожденной, если ее определитель отличен от нуля. В противном случае, если ее определитель равен нулю, то матрица
Матрицей, союзной к матрице А, называется матрица
,
где алгебраическое дополнение элемента данной матрицы А (оно определяется так же, как и алгебраическое дополнение элемента определителя).
Матрица называется обратной матрице А, если выполняется условие
.
где Е – единичная матрица того же порядка, что и матрица А. Матрица имеет те же размеры, что и матрица А.
Обратная матрица
Теорема. (Необходимое
и достаточное условие существование
обратной матрицы).
(Необходимое
и достаточное условие существование
обратной матрицы).
Обратная матрица существует и единственна исходная матрица А невырожденная.
Формула нахождения обратной матрицы для невырожденной квадратной матрицы:
где матрица из алгебраических дополнений, матрица, транспонированная матрице из алгебраических дополнений.
Формулы для вычисления обратных матриц второго и третьего порядков имеют вид:
при : ;
(1)
при : ,
. (2)
Пример 1. Найти матрицу для матрицы А, если дана матрица:
Решение.
Для вычисления обратной матрицы используем формулу (1).
1) Найдем определитель матрицы А:
и
единственна.
2) Найдем алгебраические дополнения для элементов матрицы А:
3) Составим матрицу из алгебраических дополнений:
.
4) Составим матрицу, транспонированную матрице алгебраических дополнений:
.
5) Найдем по формуле (1) обратную матрицу :
.
Убедиться в правильности вычислений обратной матрицы можно, проверив равенство:
Действительно,
Матричные уравнения
Обратная матрица применяется при решении матричных уравнений. Рассмотрим три типа матричных уравнений.
1 случай. Рассмотрим матричное уравнение
(1)
где А, В – известные матрицы, Х – неизвестная матрица.
Умножим обе части равенства (1) слева на :(2)
Формула
(2) позволяет найти неизвестную матрицу Х.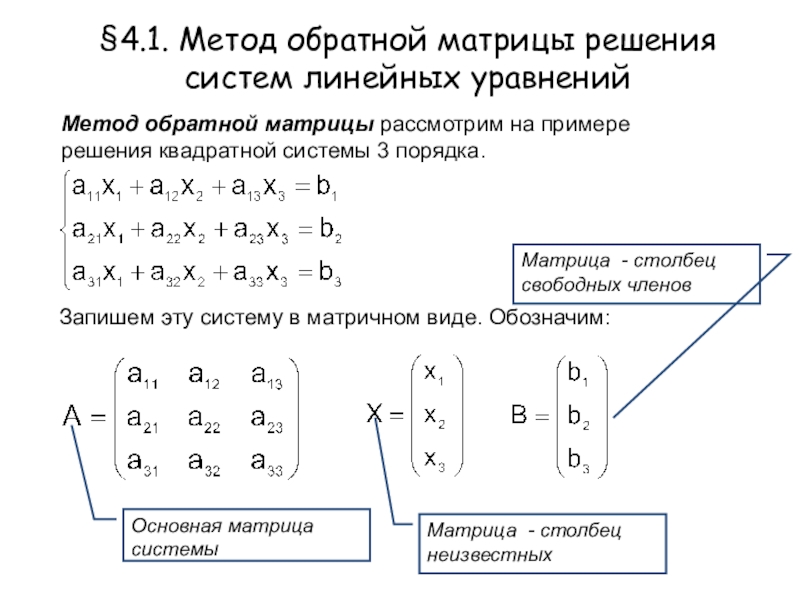
2 случай. Рассмотрим матричное уравнение
(3)
где А, В – известные матрицы, Х – неизвестная матрица.
Умножим обе части равенства (3) справа на :
(4)
Формула (4) позволяет найти неизвестную матрицу Х.
3 случай. Рассмотрим матричное уравнение
(5)
где А, D, В – известные матрицы, Х – неизвестная матрица.
Умножим обе части равенства (5) слева на и справа на , получим
имеем
(6)
Формула (6) позволяет найти неизвестную матрицу Х.
Пример 2. Решить матричное уравнение:
Решение. Искомую
матрицу Х найдем по формуле (6).
Искомую
матрицу Х найдем по формуле (6).
1) Найдем матрицу
существует и единственна.
Найдем алгебраические дополнения матрицы А:
.
Составим матрицу из алгебраических дополнений и матрицу, транспонированную матрице алгебраических дополнений .
2) Найдем матрицу :
существует и единственна.
;
3) По формуле (6) найдем матрицу Х:
Выполнить задания:
Найти матрицы , обратные для данных матриц:
а) ;
б) ;
в) ;
г) .
Решить систему матричным способом:
а)
б)
Решить матричное уравнение:
а) ;
б) .
Краткий курс высшей математики
Краткий курс высшей математики
ОглавлениеПРЕДИСЛОВИЕГЛАВА I. МЕТОД КООРДИНАТ. ПОНЯТИЕ ФУНКЦИИ § 1. ДЕЙСТВИТЕЛЬНЫЕ ЧИСЛА. КООРДИНАТЫ ТОЧКИ НА ПРЯМОЙ 2. Геометрическое изображение действительных чисел. Координаты точки на прямой 3. Абсолютная величина действительного числа 4.  Расстояние между двумя точками на прямой Расстояние между двумя точками на прямой§ 2. КООРДИНАТЫ НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕ 2. Расстояние между двумя точками на плоскости 3. Деление отрезка в данном отношении 4. Координаты точки в пространстве 5. Расстояние между двумя точками в пространстве § 3. УГОЛ МЕЖДУ ДВУМЯ ОСЯМИ. ПОЛЯРНЫЕ КООРДИНАТЫ 2. Полярные координаты 3. Зависимость между декартовыми и полярными координатами § 4. ФУНКЦИОНАЛЬНАЯ ЗАВИСИМОСТЬ 2. Понятие функции 3. График функции 4. Способы задания функций 5. Основные элементарные функции и их графики 6. Сложные функции. Элементарные функции 7. Целые и дробно-рациональные функции 8. Функции четные и нечетные. Периодические функции § 5. УРАВНЕНИЕ ЛИНИИ 2. Нахождение уравнения линии по ее геометрическим свойствам § 6 ПРЕОБРАЗОВАНИЕ КООРДИНАТ 2. Поворот осей координат ГЛАВА II. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ НА ПЛОСКОСТИ § 1. ПРЯМАЯ 2. Уравнение прямой с угловым коэффициентом 3. Уравнение прямой, параллельной оси ординат 4.  5. Точка пересечения прямых. Построение прямой по ее уравнению 6. Вычисление угла между двумя прямыми. Условия параллельности и перпендикулярности двух прямых 7. Уравнение прямой, проходящей через данную точку в заданном направлении 8. Пучок прямых 9. Уравнение прямой, проходящей через две данные точки 10. Расстояние от точки до прямой § 2. КРИВЫЕ ВТОРОГО ПОРЯДКА 2. Окружность 3. Эллипс 4. Гипербола 5. Парабола 6. Окружность, эллипс, гипербола и парабола как конические сечения 7. Упрощение уравнения кривой второго порядка. График квадратного трехчлена 8. Уравнение равносторонней гиперболы, асимптоты которой приняты за оси координат 9. График дробно-линейной функции 10. Преобразование уравнения кривой второго порядка, не содержащего члена с произведением координат ГЛАВА III. ЭЛЕМЕНТЫ ЛИНЕЙНОЙ И ВЕКТОРНОЙ АЛГЕБРЫ § 1. ЭЛЕМЕНТЫ ТЕОРИИ ОПРЕДЕЛИТЕЛЕЙ 2. Определитель третьего порядка 3.  Понятие об определителях высших порядков Понятие об определителях высших порядков§ 2. СИСТЕМЫ УРАВНЕНИЙ ПЕРВОЙ СТЕПЕНИ 2. Однородная система двух уравнений первой степени с тремя неизвестными 3. Система трех уравнений первой степени с тремя неизвестными 4. Однородная система трех уравнений первой степени с тремя неизвестными § 3. ЭЛЕМЕНТЫ ВЕКТОРНОЙ АЛГЕБРЫ 2. Линейные операции над векторами 4. Проекция вектора на ось и составляются вектора по оси 5. Разложение вектора на составляющие по осям координат 6. Направляющие косинусы вектора 7. Условие коллинеарности двух векторов 8. Скалярное произведение 9. Выражение скалярного произведения через проекции перемножаемых векторов 10. Косинус угла между двумя векторами 11. Векторное произведение 12. Выражение векторного произведения через проекции перемножаемых векторов 13. Смешанное произведение трех векторов 14. Геометрический смысл смешанного произведения 15. Условие компланарности трех векторов § 4. МАТРИЦЫ И ДЕЙСТВИЯ НАД НИМИ 2.  Равенство матриц. Действия над матрицами Равенство матриц. Действия над матрицами3. Обратная матрица 4. Матричная запись и матричное решение системы уравнений первой степени § 5. ЛИНЕЙНЫЕ ОТОБРАЖЕНИЯ 2. Преобразование координат 3. Приведение квадратичной формы к каноническому виду 4. Упрощение общего уравнения кривой второго порядка ГЛАВА IV. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ § 1. ПЛОСКОСТЬ 2. Нормальный вектор плоскости. Уравнение плоскости, проходящей через данную точку 3. Общее уравнение плоскости и его частные случаи 4. Построение плоскости по ее уравнению 5. Угол между плоскостями. Условия параллельности и перпендикулярности двух плоскостей 6. Точка пересечения трех плоскостей § 2. ПРЯМАЯ В ПРОСТРАНСТВЕ 2. Общие уравнения прямой 3. Векторное уравнение прямой. Параметрические уравнения прямой 4. Канонические уравнения прямой 5. Уравнения прямой, проходящей через две точки 6. Угол между двумя прямыми. Условия параллельности и перпендикулярности прямых § 3.  Прямая и плоскость в пространстве Прямая и плоскость в пространстве2. Точка пересечения прямой с плоскостью 3. Расстояние от точки до плоскости 4. Пучок плоскостей § 4. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА 2. Цилиндрические поверхности 3. Конические поверхности 4. Поверхность вращения 6. Гиперболоиды 7. Параболоиды ГЛАВА V. ТЕОРИЯ ПРЕДЕЛОВ § 1. ПРЕДЕЛ ФУНКЦИИ 2. Предел функции при х -> -оо 3. Предел функции при х->х0 4. Бесконечно малые функции. Ограниченные функции 5. Бесконечно большие функции и их связь с бесконечно малыми функциями 6. Основные теоремы о пределах 7. Предел функции при x -> 0 8. Последовательность. Число e 9. Натуральные логарифмы 10. Сравнение бесконечно малых функций § 2. НЕПРЕРЫВНЫЕ ФУНКЦИИ 2. Операции над непрерывными функциями. Непрерывность элементарных функций 3. Свойства функций, непрерывных на сегменте 4. Понятие об обратной функции 5. Обратные тригонометрические функции 6. Показательная и логарифмическая функции 7.  Понятие о гиперболических функциях Понятие о гиперболических функцияхГЛАВА VI. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ ФУНКЦИЙ ОДНОЙ ПЕРЕМЕННОЙ 1. Приращение аргумента и приращение функции 2. Определение непрерывности функции с помощью понятии приращения аргумента и приращения функции 3. Задачи, приводящие к понятию производной 4. Определение производной и ее механический смысл 5. Дифференцируемость функции 6. Геометрический смысл производной 7. Производные некоторых основных элементарных функций 8. Основные правила дифференцирования 9. Производная обратной функции 10. Производные обратных тригонометрических функций 11. Производная сложной функции § 12. Производные гиперболических функций 13. Производная степенной функции с любым показателем 14. Сводная таблица формул дифференцирования 15. Неявные функции и их дифференцирование 16. Уравнения касательной а нормали к кривой 17. Графическое дифференцирование § 2. ПРОИЗВОДНЫЕ ВЫСШИХ ПОРЯДКОВ 1. Нахождение производных высших порядков 2.  Механический смысл второй производной Механический смысл второй производной§ 3. ДИФФЕРЕНЦИАЛ ФУНКЦИИ 2. Производная как отношение дифференциалов 3. Дифференциал суммы, произведения и частного функций 4. Дифференциал сложной функции. Инвариантность формы дифференциала 5. Применение дифференциала к приближенным вычислениям 6. Дифференциалы высших порядков § 4. ФУНКЦИИ, ЗАДАННЫЕ ПАРАМЕТРИЧЕСКИ, И ИХ ДИФФЕРЕНЦИРОВАНИЕ 2. Дифференцирование функций, заданных параметрически § 5. ВЕКТОРНАЯ ФУНКЦИЯ СКАЛЯРНОГО АРГУМЕНТА 2. Векторная функция скалярного аргумента и ее производная 3. Уравнения касательной прямой и нормальной плоскости к пространственной кривой 4. Механический смысл первой и второй производных векторной функции скалярного аргумента § 6. НЕКОТОРЫЕ ТЕОРЕМЫ О ДИФФЕРЕНЦИРУЕМЫХ ФУНКЦИЯХ 2. Теорема Ролля 3. Теорема Лагранжа 4. Правило Лопиталя § 7. ПРИЛОЖЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИЙ И ПОСТРОЕНИЮ ГРАФИКОВ 2. Максимум и минимум функции 3. Достаточный признак существования экстремума, основанный на знаке второй производной 4.  Отыскание наибольшего и наименьшего значений функции Отыскание наибольшего и наименьшего значений функции5. Применение теории максимума и минимума к решению задач 6. Выпуклость и вогнутость графика функции. Точки перегиба 7. Асимптоты графика функции 8. Общая схема исследования функции и построение ее графика § 8. ПРИБЛИЖЕННОЕ РЕШЕНИЕ УРАВНЕНИЙ 2. Уточнение найденных значений корней методом хорд и касательных § 9. ИНТЕРПОЛЯЦИОННАЯ ФОРМУЛА ЛАГРАНЖА ГЛАВА VII. НЕОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ § 1. НЕОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ И ЕГО СВОЙСТВА 2. Геометрический смысл неопределенного интеграла 3. Таблица основных интегралов 4. Основные свойства неопределенного интеграла § 2. ОСНОВНЫЕ МЕТОДЫ ИНТЕГРИРОВАНИЯ 2. Интегрирование методом замены переменной 3. Интегрирование по частям § 3. ИНТЕГРИРОВАНИЕ РАЦИОНАЛЬНЫХ ФУНКЦИЙ 2. Рациональные дроби. Выделение правильной рациональной дроби 3. Интегрирование простейших рациональных дробей 4. Разложение правильной рациональной дроби на простейшие дроби 5.  Метод неопределенных коэффициентов Метод неопределенных коэффициентов6. Интегрирование рациональных дробей § 4. Интегрирование тригонометрических функций 2. Рациональные функции двух переменных 3. Интегралы вида § 5. ИНТЕГРИРОВАНИЕ НЕКОТОРЫХ ИРРАЦИОНАЛЬНЫХ ФУНКЦИЙ 2. Интеграл вида 3. Интегралы видов 4. Интегралы вида § 6. ОБЩИЕ ЗАМЕЧАНИЯ О МЕТОДАХ ИНТЕГРИРОВАНИЯ. ИНТЕГРАЛЫ, НЕ БЕРУЩИЕСЯ В ЭЛЕМЕНТАРНЫХ ФУНКЦИЯХ 2. Понятие об интегралах, не берущихся в элементарных функциях ГЛАВА VIII. ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ § 1. ЗАДАЧИ, ПРИВОДЯЩИЕ К ОПРЕДЕЛЕННОМУ ИНТЕГРАЛУ 2. Задача о работе переменной силы § 2. ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ 2. Свойства определенного интеграла 3. Производная интеграла по переменной верхней границе 4. Формула Ньютона—Лейбница 5. Замена переменной в определенном интеграле 6. Интегрирование по частям в определенном интеграле § 3. ГЕОМЕТРИЧЕСКИЕ И ФИЗИЧЕСКИЕ ПРИЛОЖЕНИЯ ОПРЕДЕЛЕННОГО ИНТЕГРАЛА 2. Вычисление площади в полярных координатах 3. 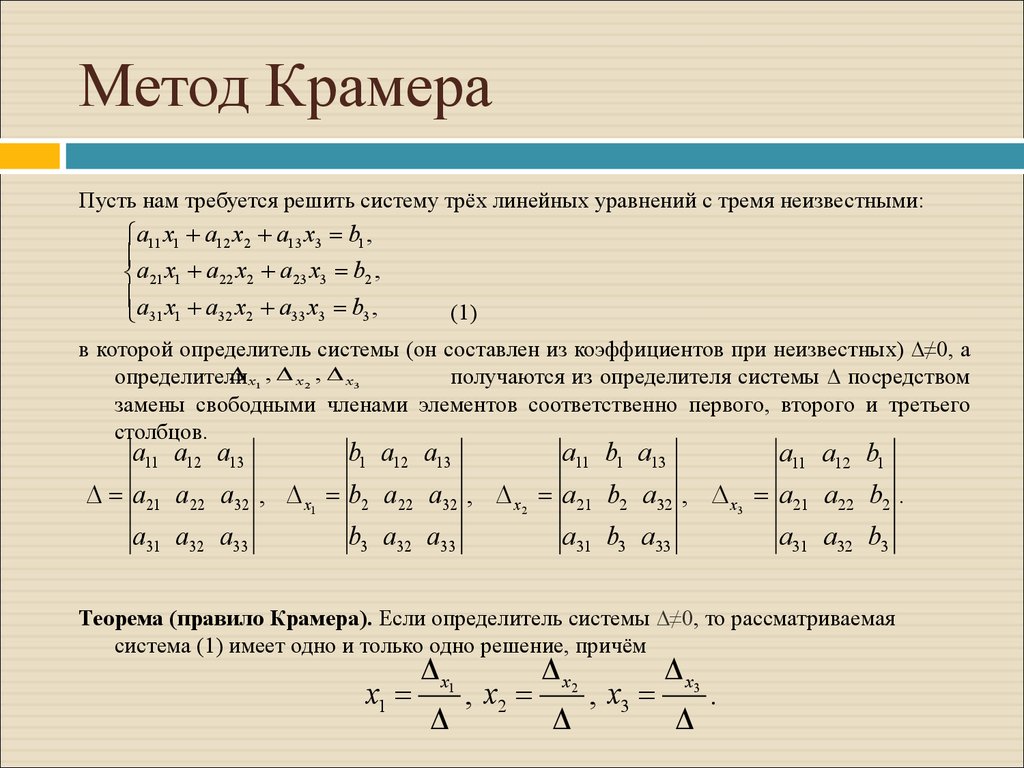 Вычисление объема тела по известным поперечным сечениям Вычисление объема тела по известным поперечным сечениям4. Объем тела вращения 5. Длина дуги кривой 6. Дифференциал дуги 7. Площадь поверхности вращения 8. Общие замечания о решении задач методом интегральных сумм § 4. КРИВИЗНА ПЛОСКОЙ КРИВОЙ 2. Вычисление кривизны 3. Радиус кривизны. Круг кривизны. Центр кривизны 4. Эволюта и эвольвента § 5. НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ 2. Интегралы от разрывных функций 3. Признаки сходимости несобственных интегралов § 6. ПРИБЛИЖЕННЫЕ МЕТОДЫ ВЫЧИСЛЕНИЯ ОПРЕДЕЛЕННЫХ ИНТЕГРАЛОВ 2. Метод трапеций 3. Метод параболических трапеций (метод Симпсона) ГЛАВА IX. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ ФУНКЦИЙ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ § 1. ФУНКЦИИ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ 2. График функции двух переменных 3. Функции трех и большего числа переменных § 2. Предел функции нескольких переменных. Непрерывность функции. Точки разрыва 2. Непрерывность функции нескольких переменных 3. Понятие области 4.  Точки разрыва Точки разрыва5. Свойства функций, непрерывных в ограниченной замкнутой области § 3. ЧАСТНЫЕ ПРОИЗВОДНЫЕ 2. Геометрический смысл частных производных функции двух переменных 3. Частные производные высших порядков § 4. ПОЛНЫЙ ДИФФЕРЕНЦИАЛ ФУНКЦИИ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ 2. Полный дифференциал функции 3. Приложение полного дифференциала к приближенным вычислениям § 5. Дифференцирование сложных и неявных функций 2. Инвариантность формы полного дифференциала 3. Дифференцирование неявных функций § 6. СКАЛЯРНОЕ ПОЛЕ 2. Производная по направлению 3. Градиент 4. Касательная плоскость а нормаль к поверхности 5. Геометрический смысл полного дифференциала функции двух переменных § 7. ЭКСТРЕМУМ ФУНКЦИЙ ДВУХ ПЕРЕМЕННЫХ 2. Наибольшее и наименьшее значения функции двух переменных ГЛАВА X. КРАТНЫЕ И КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ § 1. ДВОЙНОЙ ИНТЕГРАЛ 2. Двойной интеграл. Теорема существования 3. Свойства двойного интеграла 4.  Вычисление двойного интеграла в декартовых координатах Вычисление двойного интеграла в декартовых координатах5. Вычисление двойного интеграла в полярных координатах 6. Приложения двойного интеграла § 2. ТРОЙНОЙ ИНТЕГРАЛ 2. Тройной интеграл и его свойства 3. Вычисление тройного интеграла в декартовых координатах 4. Вычисление тройного интеграла в цилиндрических координатах 5. Приложения тройного интеграла § 3. КРИВОЛИНЕЙНЫЙ ИНТЕГРАЛ 2. Задача о работе. Криволинейный интеграл 3. Вычисление криволинейного интеграла 4. Формула Остроградского — Грина 5. Независимость криволинейного интеграла от пути интегрирования 6. Отыскание первообразной по полному дифференциалу 7. Криволинейный интеграл по длине дуги ГЛАВА XI. РЯДЫ § 1. ЧИСЛОВЫЕ РЯДЫ 2. Геометрическая прогрессия 3. Простейшие свойства числовых рядов 4. Необходимый признак сходимости ряда 5. Достаточные признаки сходимости знакоположительных рядов 6. Знакопеременные ряды 7. Остаток ряда и его оценка § 2.  ФУНКЦИОНАЛЬНЫЕ РЯДЫ ФУНКЦИОНАЛЬНЫЕ РЯДЫ2. Правильно сходящиеся функциональные ряды и их свойства § 3. СТЕПЕННЫЕ РЯДЫ 2. Свойства степенных рядов 3. Ряды по степеням разности х-а 4. Разложение функций в степенные ряды. Ряд Тейлора 5. Разложение некоторых элементарных функций в ряды Тейлора и Маклорена § 4. ПРИЛОЖЕНИЕ РЯДОВ К ПРИБЛИЖЕННЫМ ВЫЧИСЛЕНИЯМ 2. Приближенное вычисление интегралов § 5. ПОНЯТИЕ О ФУНКЦИИ КОМПЛЕКСНОЙ ПЕРЕМЕННОЙ. СТЕПЕННЫЕ РЯДЫ В КОМПЛЕКСНОЙ ОБЛАСТИ 2. Числовые ряды с комплексными членами 3. Степенные ряды в комплексной области § 6. РЯДЫ ФУРЬЕ 2. Ряд Фурье 3. Сходимость ряда Фурье 4. Ряды Фурье для четных и нечетных функций 5. Разложение в ряд Фурье функций с периодом 2l ГЛАВА XII. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ § 1. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПЕРВОГО ПОРЯДКА 2. Дифференциальные уравнения первого порядка 3. Уравнения с разделяющимися переменными 4. Однородные уравнения 5. Линейные уравнения 6. Уравнение в полных дифференциалах 7.  Особые решения Особые решения8. Приближенное решение дифференциальных уравнений первого порядка методом Эйлера § 2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 2. Простейшие уравнения второго порядка, допускающие понижение порядка 3. Понятие о дифференциальных уравнениях высших порядков § 3. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 2. Линейные однородные дифференциальные уравнения второго порядка 3. Линейные неоднородные дифференциальные уравнения второго порядка 4. Метод вариации произвольных постоянных § 4. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ 2. Линейные неоднородные дифференциальные уравнения второго порядка с постоянными коэффициентами 3. Приложение линейных дифференциальных уравнений второго порядка к изучению механических и электрических колебаний § 5. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВЫСШИХ ПОРЯДКОВ 2. Линейные дифференциальные уравнения n-го порядка с постоянными коэффициентами § 6.  ИНТЕГРИРОВАНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ С ПОМОЩЬЮ РЯДОВ ИНТЕГРИРОВАНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ С ПОМОЩЬЮ РЯДОВ§ 7. ПОНЯТИЕ О СИСТЕМАХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 2. Системы линейных дифференциальных уравнений с постоянными коэффициентами ПРИЛОЖЕНИЕ 1. ИНТЕРПОЛЯЦИОННАЯ ФОРМУЛА НЬЮТОНА ПРИЛОЖЕНИЕ 2. МЕТОД НАИМЕНЬШИХ КВАДРАТОВ |
Алгебраическое решение матричного уравнения
Переключить боковую панель оглавления
Используйте SymPy для решения матричного (линейного) уравнения. Например, решение \( \left[\begin{массив}{cc} c & d\\1 & -e\end{массив}\right] \left[\begin{массив}{cc} x\\y\end{массив}\right] = \left[\begin{array}{cc} 2\\0\end{массив}\right] \) дает \( \left[\begin{массив}{cc} x\\y\end{массив}\right] = \left[\begin{массив}{cc} \frac{2e}{ce+d}\\\frac{2}{ce+d}\end{массив}\right]\).
Альтернативы для рассмотрения
Если ваша матрица и постоянный вектор содержат только числа, а не символы, для пример \(\left[\begin{массив}{cc} 1 и 2\\3 и 4\end{массив}\right] \left[\begin{массив}{cc} x\\y\end{массив}\right] = \left[\begin{массив}{cc} 2\\0\end{массив}\right]\), вы можете использовать один из этих других бесплатных и открытых пакеты вместо SymPy:
NumPy
numpy. linalg.solve()
linalg.solve() SciPy’s
scipy.linalg.solve()mpmath lu_solve()
Решение матричного уравнения эквивалентно решению системы линейных уравнения, поэтому, если вы предпочитаете, вы можете Алгебраическое решение системы уравнений
Если вы сформулировали свою задачу как систему линейных уравнений и хотите преобразовать его в матричную форму, вы можете использовать
linear_eq_to_matrix(), а затем следуйте процедурам, описанным в этом руководстве.
 linalg.solve()
linalg.solve() Решение матричного уравнения
Вот пример решения матричного уравнения с помощью SymPy sympy.matrices.matrices.MatrixBase.solve() . Используем стандартную матрицу
формулировка уравнения \(Ax=b\), где
\(A\) — матрица, представляющая коэффициенты в линейных уравнениях
\(x\) — вектор-столбец неизвестных, которые необходимо решить для
\(b\) — вектор-столбец констант, где каждая строка — значение уравнение
>>> из sympy import init_printing >>> init_printing(use_unicode=Истина)
>>> из символов импорта sympy >>> из sympy.
 matrices импортировать матрицу
>>> c, d, e = символы ("c, d, e")
>>> A = Matrix([[c,d], [1, -e]])
>>> А
⎡к д ⎤
⎢ ⎥
⎣1 -е⎦
>>> b = Матрица ([2, 0])
>>> б
⎡2⎤
⎢ ⎥
⎣0⎦
>>> А.решить(б)
⎡ 2⋅е ⎤
⎢───────⎥
⎢с⋅е + г⎥
⎢ ⎥
⎢ 2 ⎥
⎢───────⎥
⎣с⋅е + г⎦
matrices импортировать матрицу
>>> c, d, e = символы ("c, d, e")
>>> A = Matrix([[c,d], [1, -e]])
>>> А
⎡к д ⎤
⎢ ⎥
⎣1 -е⎦
>>> b = Матрица ([2, 0])
>>> б
⎡2⎤
⎢ ⎥
⎣0⎦
>>> А.решить(б)
⎡ 2⋅е ⎤
⎢───────⎥
⎢с⋅е + г⎥
⎢ ⎥
⎢ 2 ⎥
⎢───────⎥
⎣с⋅е + г⎦
Руководство
Матрица обычно должна быть квадратной
Матрица \(A\) обычно должна быть квадратной, чтобы представить систему линейных уравнений
с тем же числом неизвестных, что и уравнения. Если нет, SymPy выдаст ошибку ShapeError: `self` и `rhs` должны иметь одинаковое количество строк.
Исключение из требования, чтобы матрица была квадратной, связано с использованием SymPy.
псевдообратного Мура-Пенроуза .
Методы решения матричных уравнений
Метод решения матриц SymPy, sympy.matrices.matrices.MatrixBase.solve() ,
может использовать несколько различных методов, которые перечислены по этой справочной ссылке API.
В зависимости от характера матрицы данный метод может быть более эффективным. К
по умолчанию, Гаусс-Жордан
будет использовано устранение.
К
по умолчанию, Гаусс-Жордан
будет использовано устранение.
Указание метода решения эквивалентно использованию специализированного метода решения.
функция. Например, используя , решить с помощью method='LU' вызовов ЛУрешить() .
Решение нескольких матричных уравнений с одной и той же матрицей
Если вам нужно повторно решить матричные уравнения с одной и той же матрицей \(A\), но различных постоянных векторов \(b\), эффективнее использовать один из следующих методы.
Вы можете использовать разложение LU
через LUsolve() :
>>> из символов импорта sympy, матрица, глаз, упростить
>>> c, d, e = символы ("c, d, e")
>>> A = Matrix([[c,d], [1, -e]])
>>> А
⎡к д ⎤
⎢ ⎥
⎣1 -е⎦
>>> b = Матрица ([2, 0])
>>> б
⎡2⎤
⎢ ⎥
⎣0⎦
>>> решение = A.LUsolve(b)
>>> решение
⎡ 2⋅е ⎤
⎢───────⎥
⎢с⋅е + г⎥
⎢ ⎥
⎢ 2 ⎥
⎢───────⎥
⎣с⋅е + г⎦
>>> # Демонстрация правильного решения
>>> упростить (решение *)
⎡2⎤
⎢ ⎥
⎣0⎦
>>> b2 = Матрица ([4, 0])
>>> б2
⎡4⎤
⎢ ⎥
⎣0⎦
>>> решение2 = A. LUsolve(b2)
>>> решение2
⎡ 4⋅е ⎤
⎢───────⎥
⎢с⋅е + г⎥
⎢ ⎥
⎢ 4 ⎥
⎢───────⎥
⎣с⋅е + г⎦
>>> # Демонстрация правильности решения 2
>>> упростить(A * решение2)
⎡4⎤
⎢ ⎥
⎣0⎦
 LUsolve(b2)
>>> решение2
⎡ 4⋅е ⎤
⎢───────⎥
⎢с⋅е + г⎥
⎢ ⎥
⎢ 4 ⎥
⎢───────⎥
⎣с⋅е + г⎦
>>> # Демонстрация правильности решения 2
>>> упростить(A * решение2)
⎡4⎤
⎢ ⎥
⎣0⎦
LUsolve(b2)
>>> решение2
⎡ 4⋅е ⎤
⎢───────⎥
⎢с⋅е + г⎥
⎢ ⎥
⎢ 4 ⎥
⎢───────⎥
⎣с⋅е + г⎦
>>> # Демонстрация правильности решения 2
>>> упростить(A * решение2)
⎡4⎤
⎢ ⎥
⎣0⎦
Другой подход заключается в вычислении обратной матрицы, но это почти всегда
медленнее и значительно медленнее для больших матриц. Если эффективное вычисление
не является приоритетом, вы можете использовать inv() :
>>> из символов импорта sympy, Matrix, упростить
>>> c, d, e = символы ("c, d, e")
>>> A = Matrix([[c,d], [1, -e]])
>>> b = Матрица ([2, 0])
>>> б
⎡2⎤
⎢ ⎥
⎣0⎦
>>> b2 = Матрица ([4, 0])
>>> б2
⎡4⎤
⎢ ⎥
⎣0⎦
>>> инв = А.инв()
>>> инв
⎡ э д ⎤
⎢─────── ───────⎥
⎢c⋅e + d c⋅e + d⎥
⎢ ⎥
⎢ 1 -с ⎥
⎢─────── ───────⎥
⎣c⋅e + d c⋅e + d⎦
>>> # Решает Ax = b для x
>>> решение = инв * б
>>> решение
⎡ 2⋅е ⎤
⎢───────⎥
⎢с⋅е + г⎥
⎢ ⎥
⎢ 2 ⎥
⎢───────⎥
⎣с⋅е + г⎦
>>> # Демонстрация правильного решения
>>> упростить (решение *)
⎡2⎤
⎢ ⎥
⎣0⎦
>>> # Решает Ax = b2 для x
>>> решение2 = инв * b2
>>> решение2
⎡ 4⋅е ⎤
⎢───────⎥
⎢с⋅е + г⎥
⎢ ⎥
⎢ 4 ⎥
⎢───────⎥
⎣с⋅е + г⎦
>>> # Демонстрация правильности решения 2
>>> упростить(A * решение2)
⎡4⎤
⎢ ⎥
⎣0⎦
Определение обратной большой символьной матрицы не может быть вычислительно
сговорчивый.
Работа с символьными матрицами
Вычислительная сложность манипулирования символьными матрицами может увеличиться быстро с размером матрицы. Например, количество членов в определителе символическая матрица увеличивается с факториалом размерности матрицы. Как В результате максимальная размерность решаемых матриц больше ограничено, чем для числовых матриц. Например, определитель этого 4x4 символьная матрица имеет 24 члена по четыре элемента в каждом члене:
>>> из sympy импорта MatrixSymbol
>>> A = MatrixSymbol('A', 4, 4).as_explicit()
>>> А
⎡А₀₀ А₀₁ А₀₂ А₀₃⎤
⎢ ⎥
⎢А₁₀ А₁₁ А₁₂ А₁₃⎥
⎢ ⎥
⎢А₂₀ А₂₁ А₂₂ А₂₃⎥
⎢ ⎥
⎣А₃₀ А₃₁ А₃₂ А₃₃⎦
>>> А.дет()
А₀₀⋅А₁₁⋅А₂₂⋅А₃₃ - А₀₀⋅А₁₁⋅А₂₃⋅А₃₂ - А₀₀⋅А₁₂⋅А₂₁⋅А₃₃ + А₀₀ ⋅А₁₂⋅А₂₃⋅А₃₁ + А₀₀⋅А₁
₃⋅А₂₁⋅А₃₂ - А₀₀⋅А₁₃⋅А₂₂⋅А₃₁ - А₀₁⋅А₁₀⋅А₂₂⋅А₃₃ + А₀₁⋅А₁₀⋅А ₂₃⋅А₃₂ + А₀₁⋅А₁₂⋅А₂₀⋅
А₃₃ - А₀₁⋅А₁₂⋅А₂₃⋅А₃₀ - А₀₁⋅А₁₃⋅А₂₀⋅А₃₂ + А₀₁⋅А₁₃⋅А₂₂⋅А₃₀ + А₀₂⋅А₁₀⋅А₂₁⋅А₃₃ -
А₀₂⋅А₁₀⋅А₂₃⋅А₃₁ - А₀₂⋅А₁₁⋅А₂₀⋅А₃₃ + А₀₂⋅А₁₁⋅А₂₃⋅А₃₀ + А₀₂ ⋅А₁₃⋅А₂₀⋅А₃₁ - А₀₂⋅А₁
₃⋅А₂₁⋅А₃₀ - А₀₃⋅А₁₀⋅А₂₁⋅А₃₂ + А₀₃⋅А₁₀⋅А₂₂⋅А₃₁ + А₀₃⋅А₁₁⋅А ₂₀⋅А₃₂ - А₀₃⋅А₁₁⋅А₂₂⋅
А₃₀ - А₀₃⋅А₁₂⋅А₂₀⋅А₃₁ + А₀₃⋅А₁₂⋅А₂₁⋅А₃₀
и решение матричного уравнения из него занимает около минуты, тогда как аналогичный
Матрица 3x3 занимает менее одной секунды. Более несвязанные, символические записи в
матрица, тем более вероятно, что она будет медленной в управлении. Этот пример, нахождение
общее решение матрицы, где все элементы являются независимыми символами, есть
крайний случай и, следовательно, самый медленный для матрицы такого размера.
Более несвязанные, символические записи в
матрица, тем более вероятно, что она будет медленной в управлении. Этот пример, нахождение
общее решение матрицы, где все элементы являются независимыми символами, есть
крайний случай и, следовательно, самый медленный для матрицы такого размера.
Ускорение решения матричных уравнений
Вот несколько предложений:
Если элементы матрицы равны нулю, убедитесь, что они распознаются как нулевые. Ты можешь сделать это, либо сделав их равными нулю, либо применив предположения.
Выбор метода решения, соответствующего свойствам матрицы, например эрмитовым, симметричным или треугольным. Ссылаться на Методы решения матричных уравнений.
Используйте класс
DomainMatrix, который может работать быстрее потому что это ограничивает область определения матричных элементов.
Использовать результат решения
Использование решения в качестве вектора
Результат решения можно использовать как вектор. Например, чтобы доказать, что
решение \(x\) правильное, вы можете умножить его на матрицу \(A\) и убедиться, что оно
производит вектор констант \(b\):
Например, чтобы доказать, что
решение \(x\) правильное, вы можете умножить его на матрицу \(A\) и убедиться, что оно
производит вектор констант \(b\):
>>> из символов импорта sympy, упростить
>>> из sympy.matrices импортировать матрицу
>>> c, d, e = символы ("c, d, e")
>>> A = Matrix([[c,d], [1, -e]])
>>> b = Матрица ([2, 0])
>>> решение = A.solve(b)
>>> решение
⎡ 2⋅е ⎤
⎢───────⎥
⎢с⋅е + г⎥
⎢ ⎥
⎢ 2 ⎥
⎢───────⎥
⎣с⋅е + г⎦
>>> # Не сразу очевидно, является ли этот результат вектором нулей
>>> (А * решение) - б
⎡ 2⋅с⋅е 2⋅д ⎤
⎢─────── + ─────── - 2⎥
⎢c⋅e + d c⋅e + d ⎥
⎢ ⎥
⎣ 0 ⎦
>>> # упрощает показывает, что этот результат является вектором нулей
>>> упростить((A * решение) - б)
⎡0⎤
⎢ ⎥
⎣0⎦
Обратите внимание, что нам пришлось использовать SimPy() , чтобы сделать SymPy
упростите выражение в матричном элементе, чтобы сразу стало очевидно, что
решение правильное.
Извлечение элементов из раствора
Поскольку вы можете перебирать элементы в векторе-столбце, вы можете извлечь
его элементы с использованием стандартных методов Python. Например, вы можете создать
список элементов, использующих понимание списка
Например, вы можете создать
список элементов, использующих понимание списка
>>> [элемент для элемента в растворе]
⎡ 2⋅е 2 ⎤
⎢───────, ───────⎥
⎣c⋅e + d c⋅e + d⎦
или вы можете извлечь отдельные элементы, подписав
>>> решение[0]
2⋅е
───────
с⋅е + д
Уравнения без решения
Если определитель матрицы равен нулю, матричные уравнения с ним не имеют решение:
>>> из символов импорта sympy
>>> из sympy.matrices импортировать матрицу
>>> c, d, e = символы ("c, d, e")
>>> A = Matrix([[c*e**2, d*e], [c*e, d]])
>>> А
⎡ 2 ⎤
⎢c⋅e d⋅e⎥
⎢ ⎥
⎣c⋅e д ⎦
>>> b = Матрица ([2, 0])
>>> A.LUsolve(b)
Traceback (последний последний вызов):
...
NonInvertibleMatrixError: Matrix det == 0; не обратимый.
Сообщить об ошибке
Если вы обнаружите ошибку в функциях решения матриц, отправьте сообщение о проблеме на
Список рассылки SymPy. Пока проблема не решена,
вы можете использовать другой метод, указанный в разделе «Альтернативы для рассмотрения».
Матричные уравнения
Цели
- Понимать эквивалентность между системой линейных уравнений, расширенной матрицей, векторным уравнением и матричным уравнением.
- Охарактеризуйте векторы b так, чтобы Ax=b было непротиворечивым, с точки зрения диапазона столбцов A.
- Охарактеризуйте матрицы A таким образом, что Ax=b непротиворечиво для всех векторов b.
- Рецепт: умножить вектор на матрицу (два способа).
- Изображение: множество всех векторов b, таких что Ax=b, является непротиворечивым.
- Словарное слово: матричное уравнение .
В этом разделе мы представляем очень лаконичный способ записи системы линейных уравнений: Ax=b. Здесь A — матрица, а x,b — векторы (обычно разного размера), поэтому сначала мы должны объяснить, как умножать матрицу на вектор.
Когда мы говорим «A — матрица размера m × n», мы имеем в виду, что A имеет m строк и n столбцов.
Определение
Пусть A — матрица размера m×n со столбцами v1,v2,...,vn:
А=С|||v1v2···vn|||D
Произведение оператора A с вектором x в Rn представляет собой линейную комбинацию
Ax=C|||v1v2···vn|||DEIIGx1x2...xnFJJH=x1v1+x2v2+···+xnvn.
Это вектор в Rm.
Пример
Чтобы Ax имело смысл, количество элементов x должно совпадать с количеством столбцов A: мы используем элементы x как коэффициенты столбцов A в линейной комбинации. Результирующий вектор имеет то же количество элементов, что и число 9.0186 строк A, так как каждый столбец A имеет такое количество записей.
Если A представляет собой матрицу размера m × n (m строк, n столбцов), то Ax имеет смысл, когда x имеет n элементов. Произведение Ax содержит m записей.
Свойства матрично-векторного произведения
Пусть A — матрица размера m × n, пусть u, v — векторы в Rn, а c — скаляр. Тогда:
- А(и+в)=Аи+Ав
- A(cu)=cAu
Определение
Матричное уравнение — это уравнение вида Ax=b, где A — матрица размера m×n, b — вектор в Rm, а x — вектор, коэффициенты которого x1,x2,. ..,xn неизвестны. .
..,xn неизвестны. .
В этой книге мы изучим два дополнительных вопроса о матричном уравнении Ax=b:
- При конкретном выборе b, каковы все решения Ax=b?
- Каковы все варианты b, чтобы Ax=b было непротиворечивым?
Первый вопрос больше похож на вопросы, к которым вы, возможно, уже привыкли на предыдущих курсах алгебры; у вас есть много практики решения уравнений типа x2−1=0 относительно x. Второй вопрос, возможно, является новой концепцией для вас. Теорема о рангах в разделе 2.9, который является кульминацией этой главы, говорит нам, что эти два вопроса тесно связаны.
Пример
Мы будем свободно перемещаться между четырьмя способами записи линейной системы снова и снова до конца книги.
Другой способ вычисления Axe
Приведенное выше определение является полезным способом определения произведения матрицы на вектор, когда дело доходит до понимания взаимосвязи между матричными уравнениями и векторными уравнениями. Здесь мы даем определение, которое лучше подходит для ручных вычислений.
Здесь мы даем определение, которое лучше подходит для ручных вычислений.
Определение
Вектор строки представляет собой матрицу с одной строкой. Произведение вектора-строки длины n и вектора (столбца) длины n равно
.Aa1a2···anBEIIGx1x2...xnFJJH=a1x1+a2x2+···+anxn.
Это скаляр.
Рецепт: Правило строки-столбца для умножения матрицы на вектор
Если A — матрица размера m×n со строками r1,r2,...,rm, а x — вектор в Rn, то
Ax=EIIG—r1——r2—...—rm—FJJHx=EIIGr1xr2x...rmxFJJH.
Пример
Пусть A — матрица со столбцами v1,v2,...,vn:
А=С|||v1v2···vn|||D.
Затем
Ax=bhas решение⇐⇒существуют x1,x2,...,xn такие, что AEIIGx1x2...xnFJJH=b⇐⇒существуют x1,x2,...,xn такие, что x1v1+x2v2+···+xnvn=b⇐⇒бисалинейная комбинация v1,v2,... ,vn⇐⇒bis находится в диапазоне столбцов матрицы A.
Пролеты и согласованность
Матричное уравнение Ax=b имеет решение тогда и только тогда, когда b находится в интервале столбцов A.
Это дает эквивалентность между алгебраическое утверждение (Ax=b непротиворечиво) и геометрическое утверждение (b находится в диапазоне столбцов A).
Пример (несогласованная система)
Пример (согласованная система)
Когда решения всегда существуют
Опираясь на это замечание, у нас есть следующий критерий того, когда Ax=b соответствует каждому выбору b.
Теорема
Пусть A — матрица размера m × n (нерасширенная). Следующие эквивалентны:
- Ax=b имеет решение для всех b в Rm.
- Длина столбцов A равна Rm.
- A имеет точку поворота в каждой строке.
Доказательство
Эквивалентность 1 и 2 устанавливается этим примечанием применительно к каждому b в Rm.
Теперь покажем, что 1 и 3 эквивалентны. (Поскольку мы знаем, что 1 и 2 эквивалентны, отсюда следует, что 2 и 3 также эквивалентны.) Если A имеет центральную точку в каждой строке, то его сокращенная ступенчатая форма строки выглядит следующим образом:
К10А0А01А0А0001АД,
и поэтому AAbB сводится к этому:
C10A0AA01A0AA0001AAD.