Решение высшей математики онлайн
‹— Назад
Изменение координат вектора при изменении базиса
Пусть в -мерном линейном пространстве выбран базис , который мы будем для удобства называть «старый» и другой базис , который мы будем называть «новый». Возьмем призвольный вектор из . Его координатный столбец в старом базисе обозначим , а в новом — . Нам нужно выяснить, как связаны друг с другом координаты в старом и в новом базисе. Для этого нам сначала нужно «связать» друг с другом старый и новый базисы. Запишем разложения новых базисных векторов по старому базису
Составим матрицу, столбцами которой служат координатные столбцы векторов нового базиса
Эта матрица называется матрицей перехода от старого базиса к новому.
Замечание 18.1 Матрица перехода всегда невырождена, то есть .
Предложение 18.5 Координатные столбцы в старом базисе и в новом базисе связаны формулой
| (18.1) |
где справа стоит произведение матрицы перехода на матрицу-столбец.
Доказательство. Так как — координатный столбец вектора в новом базисе, то
Заменив векторы их разложениями по старому базису, получим
В силу предложения 14.3 изменим порядок суммирования
Здесь мы получили разложение вектора по старому базису, причем координата вектора с номером равна . Элемент с номером столбца будет иметь такой же вид. Следовательно, формула (18.1) доказана.
Элемент с номером столбца будет иметь такой же вид. Следовательно, формула (18.1) доказана.
Пример 18.4 Пусть , то есть — трехмерное векторное пространство. Пусть задан ортонормированный базис i, j, k. Выберем другой (новый) базис
Возьмем вектор . Найдем его координаты в новом базисе.
Выпишем матрицу перехода, ее столбцы — это координаты новых базисных векторов
Пусть — координатный столбец вектора в новом базисе. Тогда
| (18.2) |
откуда
Найдем матрицу по формуле (14.14). Находим определитель
Находим алгебраические дополнения
Следовательно,
Находим координаты вектора
Таким образом, новые координаты вектора : , , , .
Тот же самый результат можно было получить, записав формулу (18.2) в виде системы уравнений
Решив эту систему, например, методом Гаусса, найдем новые координаты , , .
Математика, вышка, высшая математика, математика онлайн, вышка онлайн, онлайн математика, онлайн решение математики, ход решения, процес решения, решение, задачи, задачи по математике, математические задачи, решение математики онлайн, решение математики online, online решение математики, решение высшей математики, решение высшей математики онлайн, матрицы, решение матриц онлайн, векторная алгебра онлайн, решение векторов онлайн, система линейных уравнений, метод Крамера, метод Гаусса, метод обратной матрицы, уравнения, системы уравнений, производные, пределы, интегралы, функция, неопределенный интеграл, определенный интеграл, решение интегралов, вычисление интегралов, решение производных, интегралы онлайн, производные онлайн, пределы онлайн, предел функции, предел последовательности, высшие производные, производная неявной функции
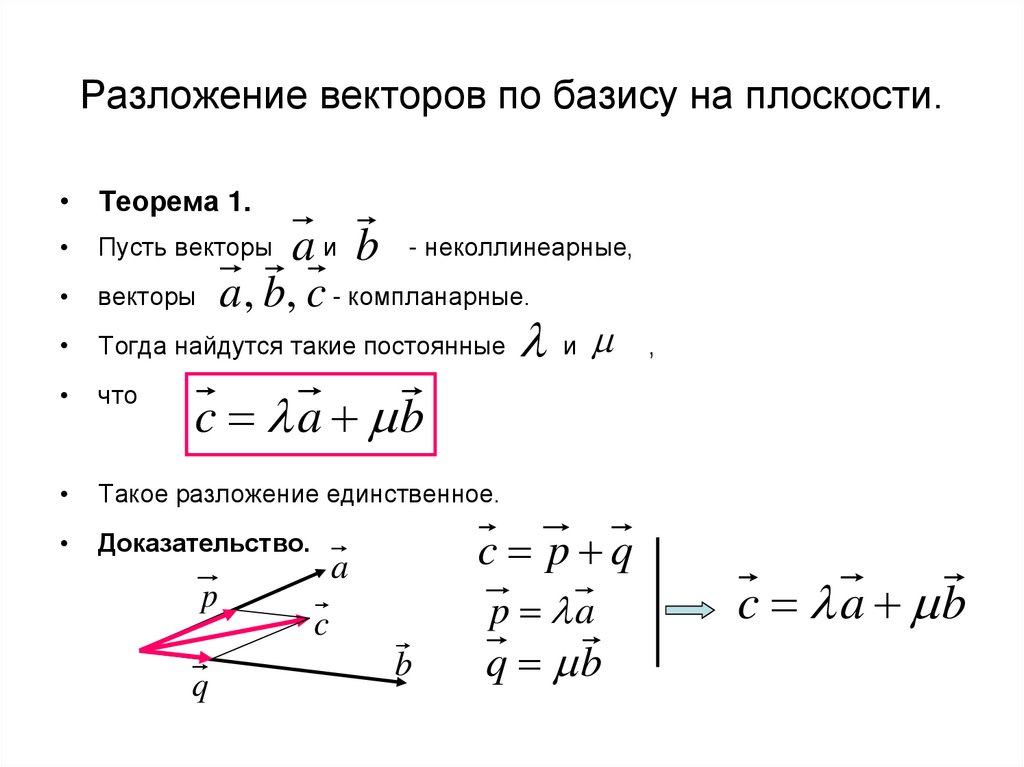
Линейная комбинация векторов.
 Базис | Математика
Базис | Математика
ОПРЕДЕЛЕНИЕ 1.29
Пусть заданы векторы и числа .
Выражение называется линейной комбинацией векторов . Очевидно, что линейная комбинация векторов является вектором. Рассмотрим особый случай, когда
| . | (1.37) |
ОПРЕДЕЛЕНИЕ 1.30
Помощь с решением задач
Если равенство (1.37) возможно только при всех , равных нулю, то векторы называются линейно-независимыми. Если же это равенство справедливо не при всех , где , то векторы называются линейно-зависимыми.
Пусть линейно-зависимы. Тогда среди найдется хотя бы одно не равное нулю число. Пусть . Разделив обе части равенства (1.37) на , получим
,
где .
Выражение является линейной комбинацией векторов . Итак, если векторы линейно-зависимы, то хотя бы один из них является линейной комбинацией остальных.
Справедливо и обратное утверждение: если хотя бы один вектор является линейной комбинацией других векторов, то вся группа векторов линейно-зависима. Пусть, например, .
Тогда и коэффициент при отличен от нуля. Это означает, что вектора линейно-зависимы.
Примерами линейно-зависимых векторов являются любые два вектора прямой; любые три вектора плоскости; любые четыре вектора пространства (рис. 1.1.12-1.1.13).
Рисунок 1.1.12
Рисунок 1.1.13
В то же время два неколлинеарных вектора и плоскости (рис. 1.1.13) или три некомпланарных вектора пространства (рис. 1.1.14) являются примерами линейно-независимых векторов.
Рисунок 1.1.14
ОПРЕДЕЛЕНИЕ 1.31
Любая группа, составленная из максимального числа линейно-независимых векторов некоторого пространства , называется базисом этого пространства. Число векторов базиса называется размерностью пространства. Так, базисом на прямой (пространство ) является любой ненулевой вектор этой прямой. Размерность прямой равна единице. Базисом на плоскости (пространство ) являются любые два неколлинеарных вектора этой плоскости. Размерность плоскости равна двум. Базисом в объемном пространстве (пространство ) являются любые три некомпланарные вектора. Размерность этого пространства равна трем.
Так, базисом на прямой (пространство ) является любой ненулевой вектор этой прямой. Размерность прямой равна единице. Базисом на плоскости (пространство ) являются любые два неколлинеарных вектора этой плоскости. Размерность плоскости равна двум. Базисом в объемном пространстве (пространство ) являются любые три некомпланарные вектора. Размерность этого пространства равна трем.
Пусть векторы образуют базис . Тогда любой вектор этого пространства является линейной комбинацией базисных векторов, то есть
| . | (1.38) |
Представление вектора в форме (1.38) называется разложением этого вектора по базисным векторам.
Числа разложения называются координатами вектора
Векторы называется компонентами вектора по базисным векторам .
Если векторы , образующие базис, имеют общее начало и вектор , где некоторая точка пространства, то числа называются также координатами этой точки. Этот факт записывают в виде .
Этот факт записывают в виде .
- Прямоугольная Декартова система координат
- Курс математики
Сохранить или поделиться с друзьями
Вы находитесь тут:
На нашем сайте Вы можете получить решение задач и онлайн помощь
Подробнее
- Решение задач и контрольных
- Написание учебных работ
- Онлайн помощь на экзамене
Подробнее
НАША ГРУППА ВКОНТАКТЕ
Помощь с решением
Поиск математических формул
Калькулятор процесса ортогонализации Грамма-Шмидта
Создано Мацеем Ковальски, докторантом
Отредактировано Богной Шик и Джеком Боватером
Последнее обновление: 10 февраля 2023 г.
Содержание:- Что такое вектор?
- Декартовы векторные пространства
- Что означает ортогональный?
- Ортогональный и ортонормированный базис
- Процесс ортогонализации Грама-Шмидта
- Пример: использование калькулятора Грама-Шмидта
- FAQ
Добро пожаловать в калькулятор Грамма-Шмидта , где у вас будет возможность узнать все об ортогонализации Грама-Шмидта . Этот простой алгоритм — способ считывания ортонормированного базиса пространства, натянутого на группу случайных векторов. Если вы не совсем уверены, что означает ортонормированный , не волнуйтесь! Это просто ортогональный базис, элементы которого имеют длину всего в одну единицу. А что значит ортогональное ? Что ж, скоро мы расскажем об этом!
Этот простой алгоритм — способ считывания ортонормированного базиса пространства, натянутого на группу случайных векторов. Если вы не совсем уверены, что означает ортонормированный , не волнуйтесь! Это просто ортогональный базис, элементы которого имеют длину всего в одну единицу. А что значит ортогональное ? Что ж, скоро мы расскажем об этом!
Так что, усаживайтесь поудобнее за свой стол и окунитесь в мир ортогональных векторов !
Что такое вектор?
Одной из первых тем на уроках физики в школе является скорость. Как только вы выучите волшебную формулу v=s/tv = s / tv=s/t, вы откроете тетрадь и начнете рисовать автомобили или велосипеды со стрелкой, указывающей их направление параллельно дороге. Учитель называет эту стрелку вектором скорости и интерпретирует ее более или менее как «9».0031 машина едет туда .
Подобные рисунки можно найти во всей физике , а стрелки всегда означают направление силы, действующей на объект, и его размер . Сценарий может описывать что угодно от плавучести в бассейне к свободному падению шара для боулинга, но одно остается неизменным: чем бы ни была стрелка, мы называем вектором .
Сценарий может описывать что угодно от плавучести в бассейне к свободному падению шара для боулинга, но одно остается неизменным: чем бы ни была стрелка, мы называем вектором .
В полной (математической) общности мы определяем как вектор к быть элемент векторного пространства . В свою очередь, мы говорим, что векторное пространство — это множество элементов с двумя операциями, которые удовлетворяют некоторым естественным свойствам . Эти элементы могут быть довольно необычными, например, последовательности, функции или перестановки. К счастью, для наших целей обычных чисел достаточно забавно .
Декартово векторное пространство
Декартово пространство является примером векторного пространства. Это означает, что число, как мы их знаем , является (1-мерным) векторным пространством. Плоскость (все, что мы рисуем на листе бумаги), то есть пространство, которое занимают пары чисел, также является векторным пространством. И, наконец, трехмерное пространство мира, в котором мы живем, интерпретируется как набор трех действительных чисел.
И, наконец, трехмерное пространство мира, в котором мы живем, интерпретируется как набор трех действительных чисел.
При работе с векторными пространствами важно иметь в виду операции, которые идут с определением : сложение и умножение на скаляр (действительное или комплексное число). Давайте посмотрим на некоторые примеры , как они работают в декартовом пробел
В одном измерении (линии) векторов являются обычными числами , поэтому добавление вектора 222 к вектору −3-3−3 равно
2+(−3)=−1\scriptsize2+(-3 )=-12+(-3)=-1
Аналогично, умножение вектора 222 на скаляр, скажем, на 0,50.50,5 является обычным умножением :
0,5×2=1\scriptsize0,5 \times 2 = 10,5×2=1
В двух измерениях векторов являются точками на плоскости , которые описываются парами чисел, и мы определяем операции по координатам . Например, если A⃗=(2,1)\vec A = (2,1)A=(2,1) и B⃗=(−1,7)\vec B = (-1, 7)B=(− 1,7), затем
A⃗+B⃗=(2,1)+(−1,7)=(2+(−1),1+7)=(1,8)\scriptsize\begin{split} & \vec A + \vec B = (2,1) + (-1,7) \\[1em] &= (2 + (-1), 1 + 7) = (1,8) \end{split}A
+B
=(2,1)+(−1,7)=(2+(−1),1+7)=(1,8)
Аналогично, если мы хотим умножить A⃗\vec AA, скажем, на 1/2, то
12⋅A⃗=12⋅(2,1)=(12⋅2,12⋅1)=(1,12)\scriptsize\ начинать {разделять} &\frac{1}{2}\cdot \vec A = \frac{1}{2}\cdot (2,1) \\[1em] &= \left(\frac{1}{2}\cdot 2,\frac{1}{2}\cdot 1\right) = \left(1,\frac{1}{2}\right) \end{split}21⋅A
=21⋅(2,1)=(21⋅2,21⋅1)=(1,21)
Как правило, описанные выше операции ведут себя так же, как и соответствующие им операции на матрицах. Ведь векторов здесь — это всего лишь однострочные матрицы . Кроме того, существует довольно много других полезных операций, определенных в декартовых векторных пространствах, таких как векторное произведение. К счастью, для этой статьи нам это не нужно, так что мы с радостью оставим это на какое-нибудь другое время , не так ли?
Ведь векторов здесь — это всего лишь однострочные матрицы . Кроме того, существует довольно много других полезных операций, определенных в декартовых векторных пространствах, таких как векторное произведение. К счастью, для этой статьи нам это не нужно, так что мы с радостью оставим это на какое-нибудь другое время , не так ли?
Теперь давайте выделим некоторые очень специальных наборов векторов
Что означает ортогональный?
Интуитивно, определить ортогонально так же, как определить перпендикулярно . Это говорит о том, что значение , ортогонального , каким-то образом связано с углом 90 градусов между объектами. И это интуитивное определение действительно работает : в двух- и трехмерных пространствах ортогональные векторы — это линии с прямым углом между ними.
Но означает ли это, что всякий раз, когда мы хотим проверить, есть ли у нас ортогональные векторы, мы должны провести линии, взять транспортир и считать угол? Это было бы хлопотно. .. А что насчет одномерных пространств? Как определить там ортогональные элементы? Не говоря уже о пространствах последовательностей
.. А что насчет одномерных пространств? Как определить там ортогональные элементы? Не говоря уже о пространствах последовательностей
Скалярное произведение (также называемое скалярное произведение ) двух векторов v⃗=(a1,a2,a3,…,an)\vec v = (a_1, a_2, a_3,…, a_n)v=(a1,a2, a3,…,an) и w⃗=(b1,b2,b3,…,bn)\vec w = (b_1, b_2, b_3,…, b_n)w=(b1,b2 ,b3,…,bn) — число v⋅wv\cdot wv⋅w, заданное формулой:
v⃗⋅w⃗= a1⋅b1+a2⋅b2+a3⋅b3+…+an⋅bn \footnotesize\begin{split} \vec v \cdot \vec w =\ &a_1\cdot b_1 + a_2\cdot b_2 \\[.5em] &+ a_3 \cdot b_3 + … + a_n\cdot b_n \end{split}v
⋅w
= a1⋅b1+a2⋅b2+a3⋅b3+…+an⋅bn
Заметьте, что действительно скалярное произведение — это просто число : мы получаем его обычным умножением и сложением чисел.
Будем говорить, что v⃗\vec vv и w⃗\vec ww являются ортогональными векторами , если v⃗⋅w⃗=0\vec v \cdot \vec w = 0v⋅w=0. Например, если векторное пространство представляет собой одномерную декартову прямую , то скалярное произведение является обычным умножением чисел: v⃗⋅w⃗=∣v⃗∣×∣w⃗∣\vec v \cdot \vec w = |\vec v| \times |\vec w|v⋅w=∣v∣×∣w∣. Так что же означает ортогональный в этом случае? Итак, произведение двух чисел равно нулю тогда и только тогда, когда одно из них равно нулю. Следовательно, любое ненулевое число ортогонально 000 и ничему другому .
Теперь, когда мы познакомились со значением ортогонального , давайте углубимся в и выделим некоторые частные случаи: ортогональный базис
и ортонормированный базис .Ортогональный и ортонормированный базис
Пусть v⃗1\vec v_1v1, v⃗2\vec v_2v2, v⃗3\vec v_3v3,. .., v⃗n\vec v_nvn — некоторые векторы в векторном пространстве. Каждое выражение вида
.., v⃗n\vec v_nvn — некоторые векторы в векторном пространстве. Каждое выражение вида
α1⋅v⃗1+α2⋅v⃗2+α3v⃗3+….+αnv⃗n\scriptsize \begin{split} &\alpha_1\cdot \vec v_1 + \alpha_2\cdot \vec v_2 + \alpha_3\vec v_3 + …. + \alpha_n\vec v_n \end{split}α1⋅v
1+α2⋅v
2+α3v
3+….+αnv
n
где α1\ alpha_1α1, α2\alpha_2α2, α3\alpha_3α3,…, αn\alpha_nαn — некоторые произвольные действительные числа, называемые линейной комбинацией векторов. Пространство всех таких комбинаций называется
Думайте о диапазоне векторов как о всех возможных векторах, которые мы можем получить из группы . Внимательный глаз заметит, что довольно часто нам не нужны все nnn векторов для построения всех комбинаций. Самый простой пример этого — когда один из векторов является нулевым вектором (т. е. с нулями по каждой координате). Что толку в том, что оно остается равным нулю независимо от того, на что мы его умножаем, и, следовательно, ничего не добавляет к выражению ?
Самый простой пример этого — когда один из векторов является нулевым вектором (т. е. с нулями по каждой координате). Что толку в том, что оно остается равным нулю независимо от того, на что мы его умножаем, и, следовательно, ничего не добавляет к выражению ?
🙋 Все векторы базиса имеют длину равную 111. Мы называем их единичными векторами, и они понадобятся вам в расчетах ортонормирования Грама-Шмидта. Посетите калькулятор единичных векторов, чтобы получить надежный фон перед нашим погружением!
Чуть менее тривиальный пример этого явления — когда у нас есть векторы e⃗1=(1,0)\vec e_1 = (1,0)e1=(1,0), e⃗2=(0,1)\vec e_2 = (0,1)e2=(0,1) и v⃗=(1,1)\vec v = (1,1)v=(1,1). Здесь мы видим, что v⃗=e⃗1+e⃗2\vec v = \vec e_1 + \vec e_2v=e1+e2, поэтому нам на самом деле не нужно vvv для линейных комбинаций, так как мы уже можем создать любое кратное ему, используя e⃗1\vec e_1e1 и e⃗2\vec e_2e2.
Все вышеизложенные наблюдения связаны с так называемой линейной независимостью векторов. В сущности, мы говорим, что набор векторов является линейно независимым , если ни один из них не является избыточным при описании их линейных комбинаций. Иначе, как вы могли догадаться, мы называем их линейно зависимыми . Вы можете подробно изучить эту концепцию на калькуляторе линейной независимости и калькуляторе связанного угла между двумя векторами!
В сущности, мы говорим, что набор векторов является линейно независимым , если ни один из них не является избыточным при описании их линейных комбинаций. Иначе, как вы могли догадаться, мы называем их линейно зависимыми . Вы можете подробно изучить эту концепцию на калькуляторе линейной независимости и калькуляторе связанного угла между двумя векторами!
Наконец, мы приходим к определению, к которому привела вся вышеизложенная теория. Максимальный набор линейно независимых векторов среди их множества называется базисом пространства, натянутого на эти векторы. Мы можем определить линейную зависимость и базис пространства, рассматривая матрицу, последовательные строки которой являются нашими последовательными векторами и вычисление ранга такого массива.
Например, из тройки e⃗1\vec e_1e1, e⃗2\vec e_2e2 и v⃗\vec vv выше пара e⃗1\vec e_1e1, e⃗2\vec e_2e2 является базисом пространства . Обратите внимание, что один вектор, скажем, e₁ , также линейно независим, но не является максимальным набором таких элементов.
Обратите внимание, что один вектор, скажем, e₁ , также линейно независим, но не является максимальным набором таких элементов.
Наконец, ортогональный базис — это базис, элементы которого являются ортогональными векторами друг другу. Кто бы мог подумать, правда? И ортонормированный базис является ортогональным базисом, длина векторов которого равна 111.
Так как же мы приходим к ортонормированному базису? Ну, , как удачно с твоей стороны спросить! Именно для этого и предназначен процесс Грама-Шмидта , как мы вскоре увидим.
Процесс ортогонализации Грама-Шмидта
Процесс Грама-Шмидта — это алгоритм, который берет любой заданный вами набор векторов и выдает ортонормированный базис диапазона этих векторов . Его шаги:
Возьмем векторы v⃗1\vec v_1v1, v⃗2\vec v_2v2, v⃗3\vec v_3v3,.
 .., v⃗n\vec v_nvn, ортонормированный базис которых вы хотите найти.
.., v⃗n\vec v_nvn, ортонормированный базис которых вы хотите найти.Возьмите u⃗1=v⃗1\vec u_1 = \vec v_1u1=v1 и установите e⃗1\vec e_1e1 равным нормализации u⃗1\vec u_1u1 (вектор с тем же направлением, но длиной 111).
Возьмем u⃗2\vec u_2u2 в качестве вектора, ортогонального вектору u⃗1\vec u_1u1, и установите e⃗2\vec e_2e2 в качестве нормализации u⃗2\vec u_2u2.
Выберите u⃗3\vec u_3u3 так, чтобы u⃗1\vec u_1u1, u⃗2\vec u_2u2 и u⃗3\vec u_3u3 были ортогональными векторами, и установите e⃗3\vec e_3e3 как нормализацию u⃗3\vec u_3u3.
Повторяйте процесс вектор за вектором, пока не закончатся векторы, мотивация или время до того, как по телевизору покажут что-то интересное.
Ненулевые e⃗i\vec e_iei являются вашим ортонормированным базисом.
 .., v⃗n\vec v_nvn, ортонормированный базис которых вы хотите найти.
.., v⃗n\vec v_nvn, ортонормированный базис которых вы хотите найти. 🙋 Если вы хотите узнать больше о векторной проекции, обязательно посетите наш калькулятор векторной проекции.
Теперь, когда мы видим идею ортогонализации Грама-Шмидта, попробуем описать алгоритм с математической точностью .
Прежде всего, давайте узнаем, как нормализовать вектор . Для этого мы просто умножаем наш вектор на обратную его длине , которую обычно называют его величиной: вы можете узнать, как вычислить ее по величине вектора Омни. Для вектора v⃗\vec vv мы часто обозначаем его длину как ∣v⃗∣|\vec v|∣v∣ (не путать с абсолютным значением числа!) и вычисляем ее как:
∣v⃗∣=v⃗⋅v⃗\scriptsize|\vec v| = \sqrt{\vec v \cdot \vec v}∣v
∣=v
⋅v
т. е. квадратный корень из скалярного произведения с самим собой. Например, если мы хотим нормализовать v⃗=(1,1)\vec v = (1,1)v=(1,1), то получим
u⃗=1∣v⃗∣⋅v⃗= 1v⃗⋅v⃗⋅(1,1)=11⋅1+1⋅1⋅(1,1)=12⋅(1,1)=(12,12)≈(0,7,0,7)\footnotesize\begin{split} &\vec u = \frac{1}{|\vec v|} \cdot \vec v = \frac{1}{\sqrt{\vec v \cdot \vec v}}\cdot (1,1)\ \[1em] &=\frac{1}{\sqrt{1\cdot 1 + 1\cdot 1}}\cdot (1,1) \\[1em] &=\frac{1}{\sqrt{2}}\cdot (1,1) = \left(\frac{1}{\sqrt{2}},\frac{1}{\sqrt{2}} \справа)\\[1em] &\ приблизительно (0,7,0,7) \end{split}u
=∣v
∣1⋅v
=v
⋅v
1⋅(1,1)=1⋅1+1⋅1
1⋅(1,1)(1,1) =2
1⋅(1,1)=(2
1,2
1)≈(0. 7,0.7)
7,0.7)
Далее нам нужно научиться находить ортогональные векторов любых векторов, которые мы получили в процессе Грама-Шмидта до сих пор. И снова на помощь приходит точечный продукт.
Если у нас есть векторы u⃗1\vec u_1u1, u⃗2\vec u_2u2, u⃗3\vec u_3u3,…, u⃗k\vec u_kuk, и мы хотим превратить v⃗\vec vv в элемент u⃗\vec uu ортогонален им всем, то применим формулу:
u⃗ = v⃗ -v⃗tu⃗1u⃗1tu⃗1t1tu⃗1 -v⃗tu⃗2u⃗2 % u⃗2=2v⃗1tu⃗1 -v⃗tu⃗2u⃗2 %2 ездить 2v⃗1tu⃗1 -v⃗tu⃗2u⃗2 or⃗2tu⃗2v⃗tu⃗3u⃗3tu⃗3tu⃗3 −….− v⃗tu⃗ku⃗k= u⃗kt3k \ nathnotesize \ begin {splat} \vec u = \vec v — \frac{\vec v \cdot \vec u_1}{\vec u_1 \cdot \vec u_1}\cdot \vec u_1 — \frac{\vec v \cdot \vec u_2}{\ vec u_2 \cdot \vec u_2}\cdot \vec u_2\\[1em] \frac{\vec v \cdot \vec u_3}{\vec u_3 \cdot \vec u_3}\cdot \vec u_3 — … -\frac{\vec v \cdot \vec u_k}{\vec u_k \cdot \vec u_k}\cdot \vec u_3k \end{split}u
=v
−u
1⋅u
1v
Ϫu
1 ⋅U
1 -u
2 ⋅U
2 В
⋅U
2 ⋅U
2 U
3 ⋅U
3 V
⋅U
3 ⋅U
3 −. … — U
… — U
K ⋅U
K V
⋅U
K ⋅U
3k
Таким образом, мы можем переписать процесс Грама-Шмидта таким образом, чтобы математики одобрительно кивали и ворчали.
Возьмите векторы v⃗1\vec v_1v1, v⃗2\vec v_2v2, v⃗3\vec v_3v3,…, v⃗n\vec v_nvn, ортонормированный базис которых вы хотите найти.
Возьмите u⃗1=v⃗1\vec u_1 = \vec v_1u1=v1 и установите e⃗1=(1/∣u⃗1∣)⋅u⃗1\vec e_1 = (1 / |\vec u_1|) \cdot \vec u_1e1=( 1/∣u1∣)⋅u1.
Возьмем u⃗2=v⃗2−[(v⃗2⋅u⃗1)/(u⃗1⋅u⃗1)]⋅u1\vec u_2 = \vec v_2 — [(\vec v_2 \cdot \vec u_1)/(\vec u_1 \cdot \vec u_1 )] \cdot u_1u2=v2−[(v2⋅u1)/(u1⋅u1)]⋅u1 и установить e⃗2=(1/∣u⃗2∣)⋅u2\vec e_2 = (1 / |\vec u_2|) \cdot u_2e2=(1/∣u2∣)⋅u2.
Возьмем u⃗3=v⃗3−[(v⃗3⋅u⃗1)/(u⃗1⋅u⃗1)]⋅u1\vec u_3 = \vec v_3 — [(\vec v_3 \cdot \vec u_1)/(\vec u_1 \cdot \vec u_1 )] \cdot u_1u3=v3−[(v3⋅u1)/(u1⋅u1)]⋅u1 и установить e⃗3=(1/∣u⃗3∣)⋅u⃗3\vec e_3 = (1 / |\vec u_3|) \cdot \vec u_3e3=(1/∣u3∣)⋅u3.
Повторяйте процесс вектор за вектором, пока у вас не закончатся векторы, мотивация или терпение, прежде чем узнать, что произойдет дальше в романе, который вы читаете.
Ненулевые e⃗i\vec e_iei являются вашим ортонормированным базисом.

Можно утверждать, что ортогонализация Грама-Шмидта содержит только простые операции , но чем больше у вас векторов, тем больше времени может занимать все это.
Хорошо, прошло много лет с тех пор, как мы в последний раз видели число, а не математический символ. Давно пора привести конкретные примеры , не так ли?
Пример: использование калькулятора Грама-Шмидта
Допустим, вы большой поклонник Pokemon GO, но недавно заболели гриппом и не можете так много двигаться . К счастью, ваш друг решил помочь вам, найдя программу , которую вы подключаете к своему телефону, чтобы вы могли ходить в игре, лежа дома в постели. Довольно круто, если вы спросите нас.
Довольно круто, если вы спросите нас.
Проблема только в том, что для того, чтобы он заработал, нужно введите векторы, которые будут определять направления, в которых может двигаться ваш персонаж . Мы живем в трехмерном мире, и они должны быть трехмерными векторами . Вы закрываете глаза, бросаете кости в уме, и выбирает несколько случайных чисел : (1,3,−2)(1,3,-2)(1,3,−2), (4,7, 1)(4, 7, 1)(4,7,1) и (3,−1,12)(3,−1,12)(3,−1,12).
» Ошибка! Векторы должны быть ортогональны! » Ой, как хлопотно … Ну хорошо что у нас калькулятор Грамма-Шмидта , чтобы помочь нам с такими проблемами!
У нас есть 333 вектора с 333 координатами в каждом, поэтому мы начинаем с того, что сообщаем калькулятору, что к выбираем соответствующие опции в разделе « Количество векторов » и « Количество координат ». Это покажет нам символический пример таких векторов с обозначениями, используемыми в калькуляторе Грама-Шмидта. Например, первый вектор задается как v⃗=(a1,a2,a3)\vec v = (a_1, a_2, a_3)v=(a1,a2,a3). Следовательно, поскольку в нашем случае первым является (1,3,−2)(1,3,-2)(1,3,−2), мы вводим:
Например, первый вектор задается как v⃗=(a1,a2,a3)\vec v = (a_1, a_2, a_3)v=(a1,a2,a3). Следовательно, поскольку в нашем случае первым является (1,3,−2)(1,3,-2)(1,3,−2), мы вводим:
a1=1a2=3a3=−2\scriptsize\begin{split} &a_1 = 1\\ &a_2 = 3\\ &a_3 = -2 \end{split}a1=1a2=3a3=−2
Аналогично для двух других получаем:
b1=4b2=7b3=1\scriptsize\begin{split} &b_1 = 4\\ &b_2 = 7\\ &b_3 = 1 \end{split}b1=4b2=7b3=1
And:
c1=3c2=−1c3=12\scriptsize\begin{split} &c_1 = 3\\ &c_2 = -1\\ &c_3 = 12 \end{split}c1=3c2=−1c3=12
Как только мы введем последнее число, калькулятор Грамма-Шмидта выдаст ответ . К сожалению, как раз когда вы собирались посмотреть, что это было, ваш телефон завис . Видимо программа занимает слишком много места, а для передачи данных с сайтов не хватает. Когда идет дождь, льет… Ну ладно, похоже, придется считать все вручную .
Обозначим наши векторы так же, как в предыдущем разделе: v⃗1=(1,3,−2)\vec v_1 = (1, 3, -2)v1=(1,3,−2), v⃗2= (4,7,1)\vec v_2 = (4, 7, 1)v2=(4,7,1) и v⃗3=(3,−1,12)\vec v_3 = (3, -1, 12)v3=(3,−1,12). Затем в соответствии с процессом Грама-Шмидта , первым шагом будет взять u⃗1=v⃗1=(1,3,−2)\vec u_1 = \vec v_1 = (1, 3, -2)u1=v1= (1,3,−2) и найти его нормировку:
Затем в соответствии с процессом Грама-Шмидта , первым шагом будет взять u⃗1=v⃗1=(1,3,−2)\vec u_1 = \vec v_1 = (1, 3, -2)u1=v1= (1,3,−2) и найти его нормировку:
e⃗1=!∣u⃗1∣⋅u⃗1=11⋅1+3⋅3+(−2)⋅(−2)⋅(1,3,−2 )114⋅(1,3,−2)≈(0,27,0,8,−0,53)\scriptsize\begin{split} &\vec e_1 = \frac{!}{|\vec u_1|}\cdot \vec u_1 \\[1em] &= \frac{1}{\sqrt{1\!\cdot\!1+3\!\cdot\!3+(-2)\!\cdot\!(-2)}}\!\cdot \ !(1,3,-2)\\[1em] &\frac{1}{\sqrt{14}}\cdot(1,3,-2)\\[1em] &\ приблизительно (0,27,0,8,-0,53) \end{split}e
1=∣u
1∣!⋅u
1=1⋅1+3⋅3+(−2)⋅(−2)
1⋅(1,3,− 2)14
1⋅(1,3,−2)≈(0.27,0.8,−0.53)
Далее находим вектор u⃗2\vec u_2u2, ортогональный вектору u⃗1\vec u_1u1:
u⃗2=v⃗2−v⃗2⋅u⃗1u⃗1⋅u⃗1⋅u⃗1=(4,7,1)−4⋅1+7⋅3+1⋅(−2)1⋅1+3⋅3+(−2)⋅(−2) )=(4,7,1)−2314⋅(1,3,−2)≈(4,7,1)−(1,64,4,93,−3,29)≈(2,36,2,07,4,29)\scriptsize\begin{ расколоть}
&\vec u_2 = \vec v_2 — \frac{\vec v_2 \cdot \vec u_1}{\vec u_1 \cdot \vec u_1} \cdot \vec u_1\\[1em]
&=(4,7,1)-\frac{4\!\cdot \!1 +7\!\cdot\! 3 + 1\!\cdot \!(-2)}{1\!\cdot\! 1+3\!\cdot\! 3+(-2)\!\cdot\! (-2)}\\[1em]
&=(4,7,1)-\frac{23}{14}\cdot(1,3,-2)\\[1em]
&\ приблизительно (4,7,1)-(1,64,4,93,-3. 29)\\[1em]
&\приблизительно(2.36,2.07,4.29)
\end{split}u
29)\\[1em]
&\приблизительно(2.36,2.07,4.29)
\end{split}u
2=v
2−u
1⋅u
1v
2⋅u
1(⋅u
1⋅u
1⋅u
1⋅u
1 ,7,1)−1⋅1+3⋅3+(−2)⋅(−2)4⋅1+7⋅3+1⋅(−2)=(4,7,1)−1423⋅ (1,3,−2)≈(4,7,1)−(1,64,4,93,−3,29)≈(2,36,2,07,4,29)
и нормализуем его:
e⃗2=1∣u⃗2∣⋅u⃗2 =15,57+4,28+18,4⋅(2,36,2,06,4,29)≈(0,44,0,39,0,8)\scriptsize\begin{split} &\vec e_2 = \frac{1}{|\vec u_2|}\cdot \vec u_2\\[1em] & = \frac{1}{5,57+4,28+18,4}\cdot (2,36,2,06,4,29)\\[1em] &\ приблизительно (0,44,0,39,0,8) \end{split}e
2=∣u
2∣1⋅u
2=5,57+4,28+18,41⋅(2,36,2,06,4,29)≈(0,44,0,39,0,8)
Наконец, мы находим вектор U₃ Ортогональный для как U⃗1 \ VEC U_1U1, так и U⃗2 \ VEC U_2U2:
U⃗3 = V⃗3 — V⃗3ZU⃗1U⃗1tu2 u⃗11102 3,−1,12)−3+(−3)+(−24)14⋅(1,3,−2)−7,08+(−2,07)+51,4828,26⋅(2,36,2,07,4,29)=( 3,−1,12)+127⋅(1,3,−2)−56,4928,26⋅(2,36,2,07,4,29)≈(0,0,0)\scriptsize \begin{split}
&\vec u_3 = \vec v_3 -\frac{\vec v_3 \cdot \vec u_1}{\vec u_1\cdot \vec u_1}\cdot \vec u_1 — \frac{\vec v_3 \cdot \vec u_2}{ \vec u_2 \cdot \vec u_2}\cdot \vec u_2\\[1em]
&= (3,-1,12)\\[1em]
&- \frac{3+(-3)+(-24)}{14}\cdot (1,3,-2)\\[1em]
&-\frac{7. 08+(-2.07)+51.48}{28.26}\cdot (2.36,2.07,4.29)\\[1em]
&=(3,-1,12)+\frac{12}{7}\cdot (1,3,-2)\\[1em]
&-\frac{56.49}{28.26}\cdot(2.36,2.07,4.29)\\[1em]
&\ приблизительно (0,0,0)
\end{split}u
08+(-2.07)+51.48}{28.26}\cdot (2.36,2.07,4.29)\\[1em]
&=(3,-1,12)+\frac{12}{7}\cdot (1,3,-2)\\[1em]
&-\frac{56.49}{28.26}\cdot(2.36,2.07,4.29)\\[1em]
&\ приблизительно (0,0,0)
\end{split}u
3=v
3−u
1⋅u
1v
3⋅u
1⋅u
1⋅u
1⋅u
10102⋅u
2v
3⋅u
2⋅u
2=(3,−1,12)−143+(−3)+(−24)⋅ (1,3,−2)−28,267,08+(−2,07)+51,48⋅(2,36,2,07,4,29)=(3,−1,12)+712⋅(1,3,−2)− 28,2656,49⋅(2.36,2.07,4.29)≈(0,0,0)
О нет, мы получили нулевой вектор! Значит, выбранные нами три вектора линейно зависимы , так что преобразовать их в три ортонормированных вектора нет никакой возможности. .. Что ж, придется немного изменить один из них и проделать все заново .
.. Что ж, придется немного изменить один из них и проделать все заново .
Часто задаваемые вопросы
Что такое ортогонализация Грама-Шмидта?
Ортогонализация Грама-Шмидта — это математическая процедура, позволяющая найти ортонормированный базис векторного пространства, определяемого набором векторов. Ортонормированный базис — это минимальный набор векторов, комбинации которых охватывают все пространство.
Как выполнить ортогонализацию Грама-Шмидта?
Из набора векторов v₁ , v₂ и v₃ можно найти элементы ортонормированного базиса:
Установить u₁ = v₁ .
Нормализовать u₁ : e₁ = u₁/|u₁| . Это первый элемент ортонормированного базиса.
Найдите второй вектор базиса, выбрав вектор, ортогональный и₁ : и₂ = v₂ — [(v₂ ⋅ и₁)/(и₁ ⋅ и₁)] × и₁ .
Нормализовать u₂ : e₂ = u₂/|u₂| .
Повторите процедуру для v₃ . Нахождение нулевого вектора означает, что исходный набор не является линейно независимым: они охватывают двумерное векторное пространство.

Как найти второй базовый вектор, если v₂=(4,2,1) и u₁=(3,-2,4)?
Начиная с первого ортогонального вектора u₁=(3,-2,4) , выполните следующие действия:
Вычислить проекцию v₂=(4,2,1) на u₁ :
proj(v₂) = [(v₂ ⋅ u₁)/(u₁ ⋅ u₁)] × u₁ = 12/29 × (4,2,1) = (1,24,-0,83,1,66)
Вычесть проекцию из v₂ :
v₂ — proj(v₂) = (4,2,1) — (1,24,-0,83,1,66) = (2,76, 2,83, -0,66)
Результатом является вектор u₂ .
Чтобы подтвердить их ортогональность, вы можете вычислить скалярное произведение и убедиться, что оно равно нулю.

Можно ли применить Грамма-Шмидта к линейно зависимым векторам?
Да, но применение ортонормирования Грама-Шмидта к линейно зависимым векторам обязательно уменьшает количество векторов в исходном наборе.
Процедура ортонормирования дает вам минимальный набор векторов, который может создать исходный набор: если в последнем есть избыточность, процесс ее устраняет.
Maciej Kowalski, PhD candidate
Number of vectors
Number of coordinates
|
Первый вектор
Вектор
Третий вектор
Проверьте 35 -й схожий Algebra Calculator. = (b1, bz Каковы пользовательские B-координаты базисных векторов b1 и bz Введите ответы в виде векторов вида
[бз] Б Каковы стандартные координаты базисных векторов b1 и bz Введите ответы в виде векторов вида .
[би лс
[бз]с
22,1> [идентификатор; «=» [идентификатор] г =
Найдите S-координаты вектора 9b1 7bz Введите ответ в виде вектора формы — Найдите B-координаты вектора 9e1 7ez . Введите свой ответ в виде вектора формы —
[ 9e + 7ez ле = [9b1 Tbz Is
= (b1, bz Каковы пользовательские B-координаты базисных векторов b1 и bz Введите ответы в виде векторов вида
[бз] Б Каковы стандартные координаты базисных векторов b1 и bz Введите ответы в виде векторов вида .
[би лс
[бз]с
22,1> [идентификатор; «=» [идентификатор] г =
Найдите S-координаты вектора 9b1 7bz Введите ответ в виде вектора формы — Найдите B-координаты вектора 9e1 7ez . Введите свой ответ в виде вектора формы —
[ 9e + 7ez ле = [9b1 Tbz Is
Вопрос
Пошаговый ответ
Пользовательская основа B = (b1, bz } Каковы пользовательские B-координаты базисных векторов b1 и bz. Введите ответы в виде векторов вида
<1,27. [би]Б <1,0> [бз] Б <0,1> Wh… Пользовательская основа B = (b1, bz }
Каковы пользовательские B-координаты базисных векторов b1 и bz. Введите ответы в виде векторов вида <1,27.
[би]Б
<1,0> [бз] Б <0,1> Каковы стандартные $ координаты базисных векторов b1 и bz Введите ответы в виде векторов вида <1,2>.
[би лс
[бз]с
22,1>
Найдите изменение базовой матрицы от пользовательских B-координат до стандартных S-координат:
[идентификатор; «=»
Найдите изменение базовой матрицы со стандартных S-координат на пользовательские B-координаты:
[идентификатор] г =
Найдите S-координаты вектора 9b1 7bz Введите ответ в виде вектора формы <1,2>— <23,-11> Найдите B-координаты вектора 9e1 7ez . Введите ответ в виде вектора формы <1,2>—
[~9e + 7ez ле = <1,22> [9b1 Тбз
Введите ответ в виде вектора формы <1,2>—
[~9e + 7ez ле = <1,22> [9b1 Тбз
Рекомендуемый AI ответ:
Чтобы сгенерировать пошаговое решение, сначала найдите изменение базовой матрицы со стандартных S-координат на пользовательские B-координаты. Это дается [идентификатор] г = [идентификатор; =
Рекомендация видео с лучшим совпадением:
Решено проверенным экспертом
У нас нет заданного вами вопроса, но вот рекомендуемое видео, которое может помочь.
Вопрос о наилучшем совпадении:
балла Стандартный базис S = {e1, e2 и пользовательский базис B = {b1,bz для R2 показаны на рисунках ниже: Стандартный базис S = {6L.e2 823 -2 [идентификатор]; Пользовательская основа B = {b1, bz} Каковы пользовательские B-координаты базисных векторов b1 и b2 Введите ответы в виде векторов вида <1,2> [б IB <-3-3> [бз] Б Каковы стандартные S-координаты базисных векторов b1 и b2 Введите ответы в виде векторов вида <1,2>_
Рекомендуемые видео
Стенограмма
Стандартная база для этого вопроса — 1 из 2 учащихся. У нас есть новая основа для купальных костюмов, в которую мы можем записать понравившиеся вам костюмы, чтобы вы могли видеть, что червь. Он имеет минус 3 правые координаты и 1 правую. Мощность была минус 31 и целая. Вы также можете записать это, если вам 2 года. Правильно. Вы можете видеть единицы, которые минус 3 вправо и минус 3 вправо. У нас лидер канстен прав, потому что они даются по напряжению. Первое, что мы хотим знать, это координаты костонов. Каковы стандартные координаты векторов основания, изгиба n b2? Что является эталоном координат? Вы знаете, это уже. Мы его выложили. Это стандарт и, безусловно, так. Не думаю, что мне следовало это говорить. Первый вопрос: костюм согласуется с базой. Стоимость базисной ставки определяется координатами. Когда вы смотрите на бассейны для костюмов, вы можете видеть, что это 0, и для этого было бы много времени, потому что мы смотрим на постоянный бенсон. Конечно, 10 и другая 1 у вас есть за 1, у вас есть 1 и у вас есть ze и за b 2, у вас есть 0 и 1 правильно.
У нас есть новая основа для купальных костюмов, в которую мы можем записать понравившиеся вам костюмы, чтобы вы могли видеть, что червь. Он имеет минус 3 правые координаты и 1 правую. Мощность была минус 31 и целая. Вы также можете записать это, если вам 2 года. Правильно. Вы можете видеть единицы, которые минус 3 вправо и минус 3 вправо. У нас лидер канстен прав, потому что они даются по напряжению. Первое, что мы хотим знать, это координаты костонов. Каковы стандартные координаты векторов основания, изгиба n b2? Что является эталоном координат? Вы знаете, это уже. Мы его выложили. Это стандарт и, безусловно, так. Не думаю, что мне следовало это говорить. Первый вопрос: костюм согласуется с базой. Стоимость базисной ставки определяется координатами. Когда вы смотрите на бассейны для костюмов, вы можете видеть, что это 0, и для этого было бы много времени, потому что мы смотрим на постоянный бенсон. Конечно, 10 и другая 1 у вас есть за 1, у вас есть 1 и у вас есть ze и за b 2, у вас есть 0 и 1 правильно.