
Вычисление определителей 2-го и 3-го порядков.
Литература: Сборник задач по математике. Часть 1. Под ред А. В. Ефимова, Б. П. Демидовича.
Квадратная таблица $$A=\begin{pmatrix}a_{11}&a_{12}\\a_{21}&a_{22}\end{pmatrix}$$ составленная из четырех действительных или комплексных чисел называется квадратной матрицей 2-го порядка. Определителем 2-го порядка, соответствующим матрице $A$ (или просто определителем матрицы $A$) называется число $$\det A=\begin{vmatrix}a_{11}&a_{12}\\a_{21}&a_{22}\end{vmatrix}=a_{11}a_{22}-a_{12}a_{21}.$$
Аналогично если $$A=\begin{pmatrix}a_{11}&a_{12}&a_{13}\\a_{21}&a_{22}&a_{23}\\a_{31}&a_{32}&a_{33}\end{pmatrix}$$
— квадратная матрица 3-го порядка, то соответсвующим ей определителем 3-го порядка называется число
$$\det A=\begin{vmatrix}a_{11}&a_{12}&a_{13}\\a_{21}&a_{22}&a_{23}\\a_{31}&a_{32}&a_{33}\end{vmatrix}=$$ $$a_{11}a_{22}a_{33}+a_{21}a_{32}a_{13}+a_{12}a_{23}a_{31}-a_{13}a_{22}a_{31}-a_{12}a_{21}a_{33}-a_{23}a_{32}a_{11}. 2+5x+4=0:$
2+5x+4=0:$
$D=25-16=9$
$x_1=\frac{-5-3}{2}=-4;\qquad x_2=\frac{-5+3}{2}=-1.$
Ответ: $x_1=-4;\,\,\, x_2=-1.$
{jumi[*4]}
3.13. $\begin{vmatrix}3&4&-5\\8&7&-2\\2&-1&8\end{vmatrix}.$
Решение.
$\begin{vmatrix}3&4&-5\\8&7&-2\\2&-1&8\end{vmatrix}=3\cdot 7\cdot8+(-5)\cdot 8\cdot(-1)+4\cdot(-2)\cdot2-(-5)\cdot7\cdot2-$
$-4\cdot8\cdot8-3\cdot(-2)\cdot(-1)=168+40-16+70-256-6=0.$
Ответ: $0.$
3.16. $\begin{vmatrix}\sin\alpha&\cos\alpha&1\\\sin\beta&\cos\beta&1\\\sin\gamma&\cos\gamma&1\end{vmatrix}.$
Решение.
$\begin{vmatrix}\sin\alpha&\cos\alpha&1\\\sin\beta&\cos\beta&1\\\sin\gamma&\cos\gamma&1\end{vmatrix}=\sin\alpha\cos\beta+\sin\beta\cos\gamma+\cos\alpha\sin\gamma-$
$-\cos\beta\sin\gamma-\sin\alpha\cos\gamma-\cos\alpha\sin\beta=$
$=\sin(\alpha-\beta)+\sin(\beta-\gamma)+\sin(\gamma-\alpha).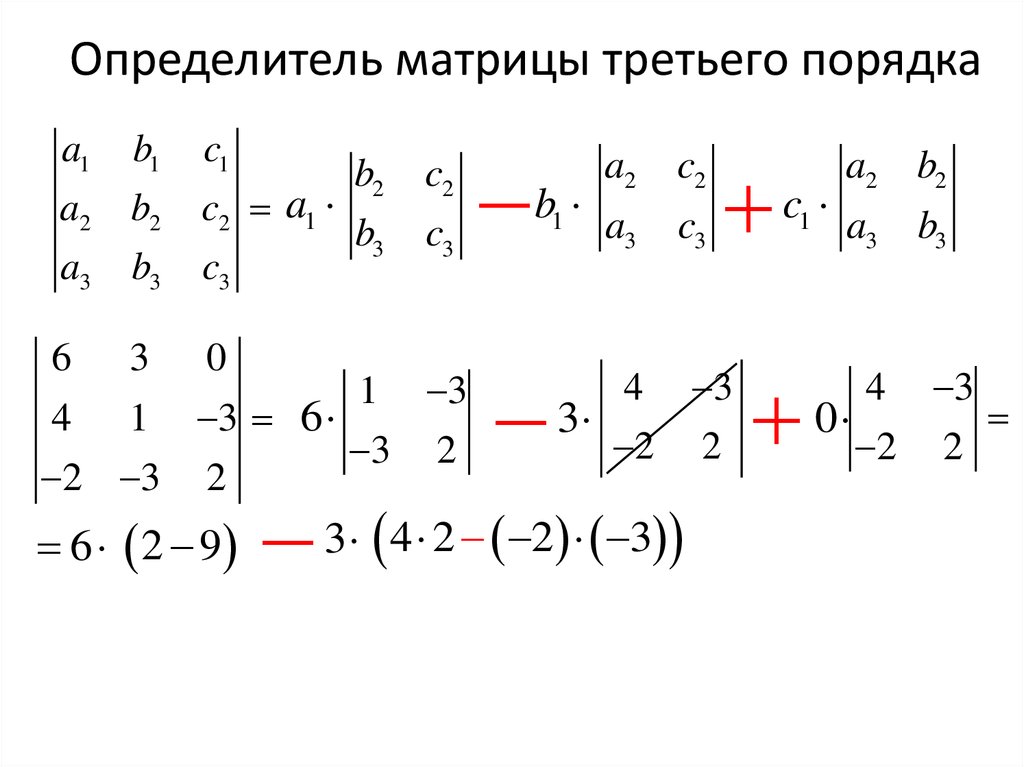 T=\det A.$
T=\det A.$
2) Если все элементы строки (столбца) умножить на одно и тоже число, то определитель умножится на это число.
3) Если поменять местами две строки (столбца), то определитель поменяет знак. В частности, если две строки (столбца) равны, то определитель равен нулю.
4) Если каждый элемент некоторой строки (столбца) определителя представлен в виде суммы двух слагаемых, то определитель равен сумме двух определителей, у которых все строки (столбцы), кроме данной, прежние, а в данной строке (столбце) в первом определителе стоят первые, а во втором — вторые слагаемые.
5) Если одна строка (столбец) является линейной комбинацией других строк (столбцов), то определитель равен нулю.
6) Определитель не меняется если к одной из его строк (столбцов) добавить линейную комбинацию его других строк (столбцов).
Примеры:
3.24. Используя свойства определителя доказать следующее тождество: $\begin{vmatrix}a_1+b_1x&a_1-b_1x&c_1\\a_2+b_2x&a_2-b_2x&c_2\\a_3+b_3x&a_3-b_3x&c_3\end{vmatrix}=$ $-2x\begin{vmatrix}a_1&b_1&c_1\\a_2&b_2&c_2\\a_3&b_3&c_3\end{vmatrix}. $
$
Доказательство.
$\begin{vmatrix}a_1+b_1x&a_1-b_1x&c_1\\a_2+b_2x&a_2-b_2x&c_2\\a_3+b_3x&a_3-b_3x&c_3\end{vmatrix}=$
$\begin{vmatrix}a_1&a_1-b_1x&c_1\\a_2&a_2-b_2x&c_2\\a_3&a_3-b_3x&c_3\end{vmatrix}+$ $\begin{vmatrix}b_1x&a_1-b_1x&c_1\\b_2x&a_2-b_2x&c_2\\b_3x&a_3-b_3x&c_3\end{vmatrix}=$
$=\begin{vmatrix}a_1&a_1&c_1\\a_2&a_2&c_2\\a_3&a_3&c_3\end{vmatrix}-$ $\begin{vmatrix}a_1&b_1x&c_1\\a_2&b_2x&c_2\\a_3&b_3x&c_3\end{vmatrix}+$ $\begin{vmatrix}b_1x&a_1&c_1\\b_2x&a_2&c_2\\b_3x&a_3&c_3\end{vmatrix}-$ $\begin{vmatrix}b_1x&b_1x&c_1\\b_2x&b_2x&c_2\\b_3x&b_3x&c_3\end{vmatrix}=$
$-\begin{vmatrix}a_1&b_1x&c_1\\a_2&b_2x&c_2\\a_3&b_3x&c_3\end{vmatrix}+$ $\begin{vmatrix}b_1x&a_1&c_1\\b_2x&a_2&c_2\\b_3x&a_3&c_3\end{vmatrix}=$ $-\begin{vmatrix}a_1&b_1x&c_1\\a_2&b_2x&c_2\\a_3&b_3x&c_3\end{vmatrix}-$ $\begin{vmatrix}a_1&b_1x&c_1\\a_2&b_2x&c_2\\a_3&b_3x&c_3\end{vmatrix}=$
$-2\begin{vmatrix}a_1&b_1x&c_1\\a_2&b_2x&c_2\\a_3&b_3x&c_3\end{vmatrix}=$ $-2x\begin{vmatrix}a_1&b_1&c_1\\a_2&b_2&c_2\\a_3&b_3&c_3\end{vmatrix}.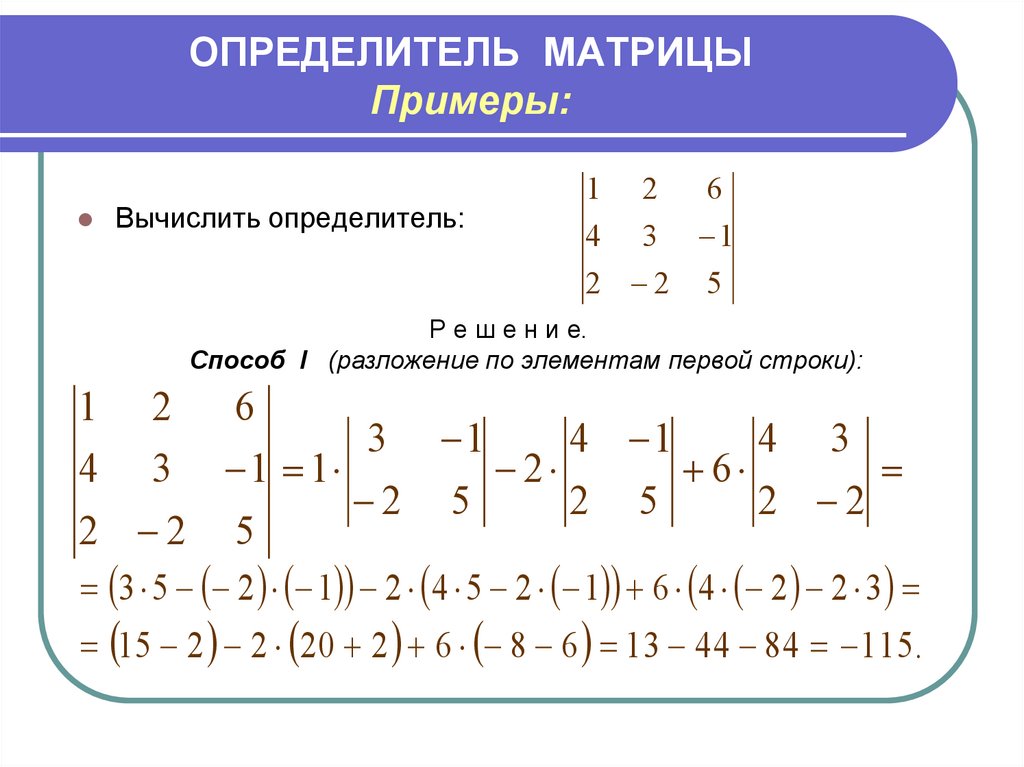 {3+4}\begin{vmatrix}2&-3&4\\4&-2&3\\3&-1&4\end{vmatrix}=$
{3+4}\begin{vmatrix}2&-3&4\\4&-2&3\\3&-1&4\end{vmatrix}=$
$=a(-27-8-8+3+24+24)-b(18+16+24-9-16-48)+$
$+c(-12-4-18+6+4+36)-d(-16-16-27+24+6+48)=$
$=8a+15b+12c-19d.$
Ответ: $8a+15b+12c-19d.$
{jumi[*4]}
3.61. Вычислить определитель: $\begin{vmatrix}2&1&1&1&1\\1&3&1&1&1\\1&1&4&1&1\\1&1&1&5&1\\1&1&1&1&6\end{vmatrix}.$
Решение.
Вычислим этот определитель с помощью приведения определителя к треугольному виду:
$\begin{vmatrix}2&1&1&1&1\\1&3&1&1&1\\1&1&4&1&1\\1&1&1&5&1\\1&1&1&1&6\end{vmatrix}=$ от каждой из первых четырех строк отнимем пятую $=\begin{vmatrix}1&0&0&0&-5\\0&2&0&0&-5\\0&0&3&0&-5\\0&0&0&4&-5\\1&1&1&1&6\end{vmatrix}=$ от пятой строки отнимем первую, затем пятую строку умножим на два
$=\begin{vmatrix}1&0&0&0&-5\\0&2&0&0&-5\\0&0&3&0&-5\\0&0&0&4&-5\\0&1&1&1&11\end{vmatrix}=$ $\frac{1}{2}\begin{vmatrix}1&0&0&0&-5\\0&2&0&0&-5\\0&0&3&0&-5\\0&0&0&4&-5\\0&2&2&2&22\end{vmatrix}=$ Далее от пятой строки отнимем вторую, после чего пятую строку умножим на $\frac{3}{2}:$ $=\frac{1}{2}\begin{vmatrix}1&0&0&0&-5\\0&2&0&0&-5\\0&0&3&0&-5\\0&0&0&4&-5\\0&0&2&2&27\end{vmatrix}=$ $\frac{1}{2}\frac{2}{3}\begin{vmatrix}1&0&0&0&-5\\0&2&0&0&-5\\0&0&3&0&-5\\0&0&0&4&-5\\0&0&3&3&40,5\end{vmatrix}=$ Теперь от пятой строки отнимем третью, после чего пятую строку умножим на $\frac{4}{3}:$ $=\frac{1}{3}\begin{vmatrix}1&0&0&0&-5\\0&2&0&0&-5\\0&0&3&0&-5\\0&0&0&4&-5\\0&0&0&3&45,5\end{vmatrix}=$ $\frac{1}{3}\frac{3}{4}\begin{vmatrix}1&0&0&0&-5\\0&2&0&0&-5\\0&0&3&0&-5\\0&0&0&4&-5\\0&0&0&4&\frac{182}{3}\end{vmatrix}=$ Отнимем от пятой строки четвертую и перемножив диагональные элементы получаем ответ: $=\frac{1}{4}\begin{vmatrix}1&0&0&0&-5\\0&2&0&0&-5\\0&0&3&0&-5\\0&0&0&4&-5\\0&0&0&0&\frac{197}{3}\end{vmatrix}=$ $=\frac{1}{4}\cdot2\cdot3\cdot4\cdot\frac{197}{3}=394.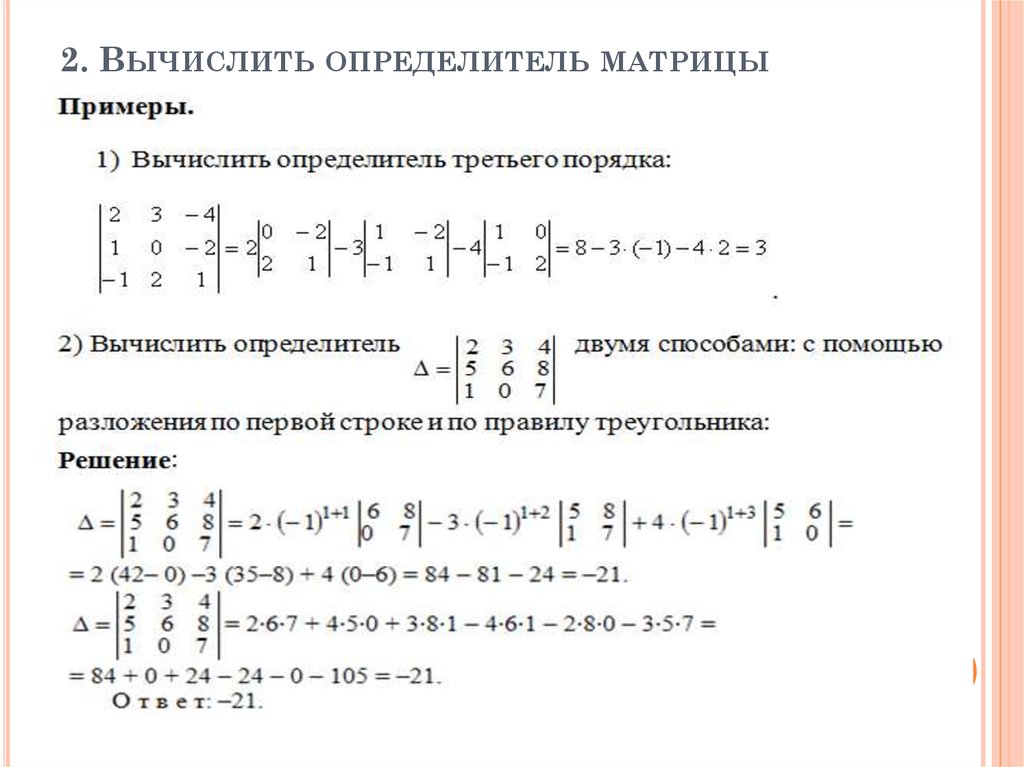 2.$
2.$
Вычислить определители, используя подходящее разложение по строке или столбцу.
3.51. $\begin{vmatrix}-1&5&2\\0&7&0\\1&2&0\end{vmatrix}.$
Ответ: $-14.$
3.52. $\begin{vmatrix}2&1&0\\1&2&1\\0&1&2\end{vmatrix}.$
Ответ: $4.$
3.54. (б) $\begin{vmatrix}5&a&2&-1\\4&b&4&-3\\2&c&3&-2\\4&d&5&-4\end{vmatrix}.$
Ответ: $2a-8b+c+5d.$
3.62. Вычислить определитель: $\begin{vmatrix}5&6&0&0&0\\1&5&6&0&0\\0&1&5&6&0\\0&0&1&5&6\\0&0&0&1&5\end{vmatrix}.$
Ответ: $665.$
{jumi[*4]}
Сообщество Экспонента
- вопрос
- 22.09.2022
Математика и статистика, Системы управления, Изображения и видео, Робототехника и беспилотники, Глубокое и машинное обучение(ИИ), Другое
Коллеги, добрый день. Необходимо использовать corrcoef, а массивы разной длины.
Как сделать кол-во элементов одинаково?
Необходимо использовать corrcoef, а массивы разной длины.
Как сделать кол-во элементов одинаково?
Коллеги, добрый день. Необходимо использовать corrcoef, а массивы разной длины. Как сделать кол-во элементов одинаково?
8 Ответов
- вопрос
- 20.09.2022
Другое, Встраиваемые системы, Цифровая обработка сигналов, Системы управления
Здравствуйте!Возникла необходимость менять некоторое строчки в сишном файле автоматически, используя матлабовский скрипт. Прошерстил весь интернет, в т.ч. англоязычные форумы, не смог ничего найт…
Здравствуйте!Возникла необходимость менять некоторое строчки в сишном файле автоматически, используя матлабовский скрипт. Прошерстил весь интернет, в т.ч. англоязычные форумы, не смог ничего найт…
1 Ответ
- MATLAB
20.09.2022
- Публикация
- 15.09.2022
Системы управления, Другое
Видел видос на канале экспоненты по созданию топливной системы.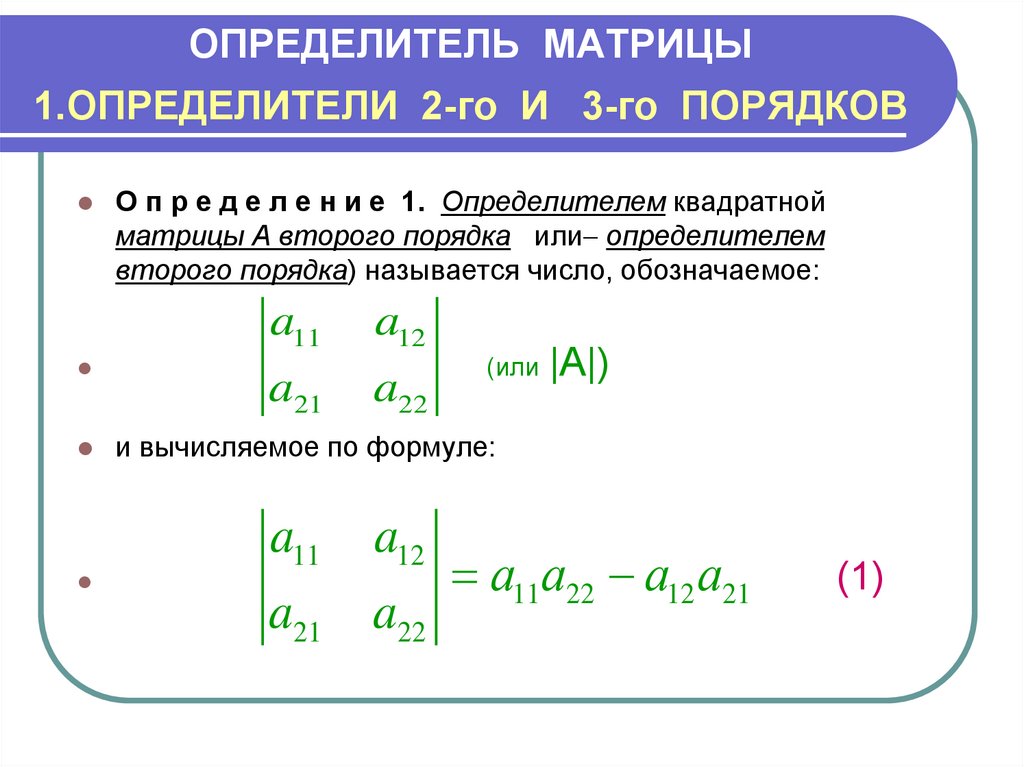 Вопрос заключается в наличии более полного описания готового примера или соответсвующее документации. Я новичок в симулинке и ещё многого не знаю. Адекватных и раскрытых пособий по созданию гидрав…
Вопрос заключается в наличии более полного описания готового примера или соответсвующее документации. Я новичок в симулинке и ещё многого не знаю. Адекватных и раскрытых пособий по созданию гидрав…
Моделирование гидравлических систем в simulink
- Публикация
- 10.09.2022
Системы управления, Электропривод и силовая электроника, Другое
Планирую написать книгу про модельно-ориентированное программирование с автоматическим генерированием кода применительно к разработке разнообразных микропроцессорных систем управления электроприводов. В этой книге в научно-практическо-методической форме я план…
Планирую написать книгу про модельно-ориентированное программирование с автоматическим генерированием кода применительно к разработке разнообразных микропроцессорных систем управления электроприводов.
- Публикация
- 24.08.2022
Цифровая обработка сигналов, Системы связи, Математика и статистика
&. ..
..
Здесь собрана литература по комбинированным методам множественного доступа, в которых используется разделение пользователей в нескольких ресурсных пространствах.
- вопрос
- 23.08.2022
Математика и статистика, Радиолокация, Цифровая обработка сигналов
Есть записанный сигнал с датчика (синус с шумом). Как определить соотношение сигнал/шум?
Есть записанный сигнал с датчика (синус с шумом). Как определить соотношение сигнал/шум?
4 Ответа
- ЦОС
- цифровая обработка сигналов
23.08.2022
- Публикация
- 23.08.2022
Цифровая обработка сигналов, Системы связи, Математика и статистика
&…
Здесь соборана литература по методам множественного доступа с поляризационным разделением и разделением по орбитальном угловому моменту.
- Публикация
- 16.08.2022
Цифровая обработка сигналов, Системы связи, Математика и статистика
Здесь собрана литература по методам множественного доступа с пространственным разделением.
- вопрос
- 22.07.2022
Изображения и видео, Цифровая обработка сигналов, Математика и статистика, Биология, Встраиваемые системы, Глубокое и машинное обучение(ИИ), Автоматизация испытаний, ПЛИС и СнК, Системы управления, Другое
Здравствуйте. Мне нужно обработать большое количество файлов с похожими названиями, каждый блок файлов относится к отдельному объекту, например: file_1_1.txt file_1_2.txt file_1_3.txt file_1_4.txt fil…
Здравствуйте.
Мне нужно обработать большое количество файлов с похожими названиями, каждый блок файлов относится к отдельному объекту, например:
file_1_1.
2 Ответа
- чтение
22.07.2022
- вопрос
- 17.07.2022
Математика и статистика, Цифровая обработка сигналов
Уважаемые коллеги, добрый вечер! В общем, возникла проблема следующего характера. Имеется сигнал, достаточно большой объем точек, длительность порядка 35-40 секунд. Он представлят собой последовательн…
Уважаемые коллеги, добрый вечер! В общем, возникла проблема следующего характера. Имеется сигнал, достаточно большой объем точек, длительность порядка 35-40 секунд. Он представлят собой последовательн…
- MATLAB
- Signal Processing
17.07.2022
Определители третьего порядка с примерами | Математика
Пусть дана квадратная матрица третьего порядка
ОПРЕДЕЛЕНИЕ 1.8
Определителем третьего порядка, соответствующим данной квадратной матрице А, называется число
(1. 7) 7) |
Помощь с решением задач
Определитель третьего порядка обозначается символом
| (1.8) |
где числа называются его элементами.
Индексы у элемента показывают номера строки и столбца, на пересечении которых записан этот элемент.
Например, элемент расположен на пересечении второй строки и третьего столбца .
Элементы образуют главную диагональ определителя, а элементы побочную диагональ.
Определение имеет сложный по форме вид, поэтому для нахождения определителя третьего порядка предложены более простые правила. Так, согласно правилу треугольников необходимо:
- вычислить с собственными знаками произведения элементов , лежащих на главной диагонали и в вершинах двух равнобедренных треугольников, основания которых параллельны этой диагонали ;
- найти произведения элементов, лежащих на побочной диагонали и в вершинах двух равнобедренных треугольников, основания которых параллельны побочной диагонали, и взять их с противоположными знаками ;
- найти общую сумму всех произведений.

ПРИМЕР 1.1.7
Все свойства определителей второго порядка справедливы и для определителей третьего порядка. Доказательства этих свойств основаны на вычислении определителя третьего порядка по формуле (1.7).
Например, покажем, что определитель, у которого элементы двух его строк пропорциональны, равен нулю. Действительно,
Аналогично проверяется справедливость и других свойств.
Пусть дан определитель (1.8) третьего порядка.
ОПРЕДЕЛЕНИЕ 1.9: Минором элемента , где определителя третьего порядка, называется определитель второго порядка, полученный из данного вычеркиванием й строки и го столбца. Так, например, минор элемента есть определитель
а минор элемента есть
С помощью миноров определитель (7) можно записать в виде
| (1.9) |
ОПРЕДЕЛЕНИЕ 1.10: Алгебраическим дополнением элемента , где , называется минор этого элемента, взятый со знаком .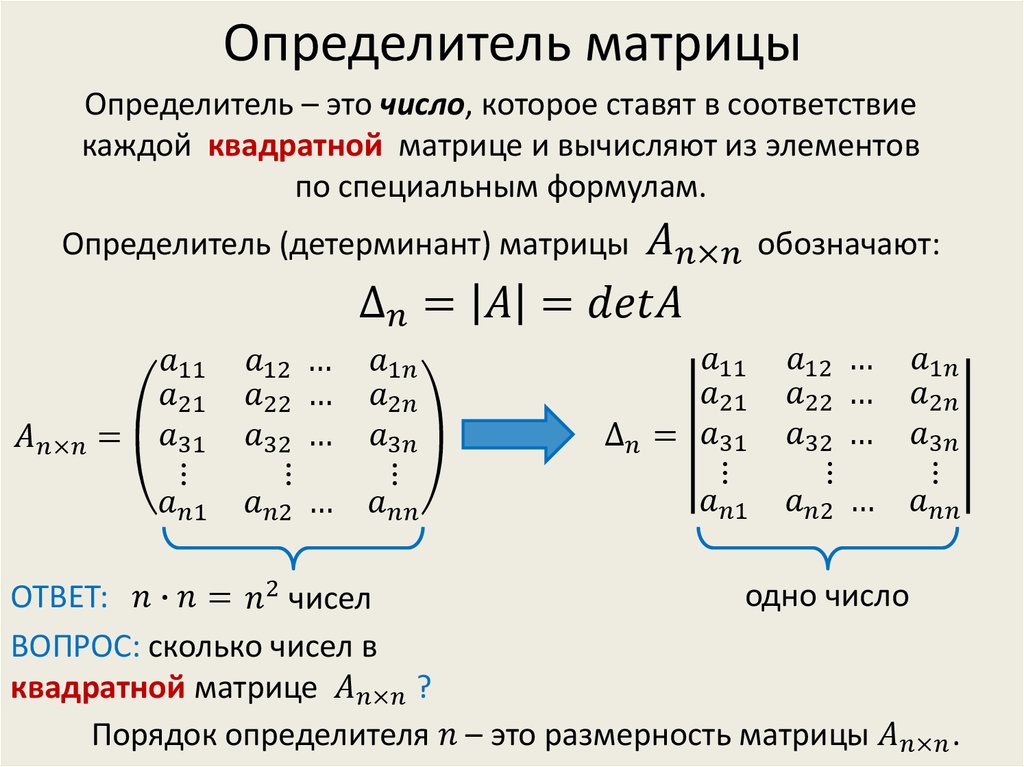 По определению 4.3 имеем
По определению 4.3 имеем
| где / | (1.10) |
Например,
и т.д.
ТЕОРЕМА 1.1
Определитель третьего порядка равен сумме произведений элементов любой его строки (столбца) на их алгебраические дополнения. Иными словами, имеют место шесть равенств:
| (1.11) |
Проверим, например, справедливость равенства
Согласно определениям минора и алгебраического дополнения получим
ТЕОРЕМА 1.2 Сумма произведений элементов какой- либо строки (столбца) определителя на алгебраические дополнения элементов любой другой его строки (столбца) равна нулю.
Для определенности выберем элементы первой строки и алгебраические дополнения элементов второй строки определителя. Составим сумму произведений и покажем, что эта сумма равна нулю.
Составим сумму произведений и покажем, что эта сумма равна нулю.
Действительно,
Аналогично проверяется равенство нулю и всех других подобных сумм.
В заключение рассмотрим схему использования свойств определителя и теоремы разложения при вычислении определителя.
ПРИМЕР 1.1.8
Вычислить определитель
Решение. Разложим определитель по элементам третьей строки.
ПРИМЕР 1.1.9
Вычислить определитель
Решение. Прибавляя ко второй строке первую, умноженную на — 8,
получим Раскладывая этот определитель по элементам второй его строки, найдем
- Определители n-го порядка с примерами
- Курс математики
Сохранить или поделиться с друзьями
Вы находитесь тут:
Уважаемые студенты
На нашем сайте можно получить помощь по всем разделам математики и другим предметам:
✔ Решение задач
✔ Выполнение учебных работ
Подробнее
Стоимость мы сообщим в течение 5 минут
на указанный вами адрес электронной почты.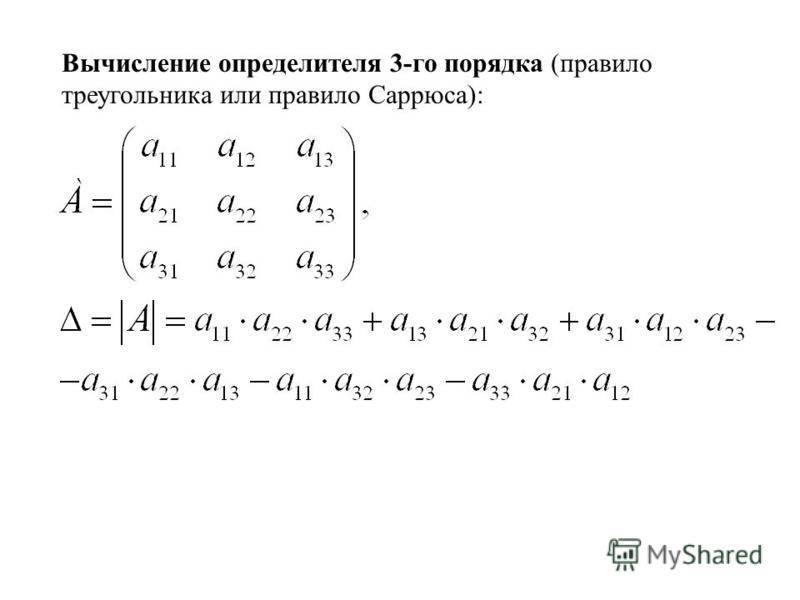
Если стоимость устроит вы сможете оформить заказ.
Сохранить или поделиться с друзьями
- Решение задач и контрольных
- Написание учебных работ
- Онлайн помощь на экзамене
Подробнее
Поиск математических формуллинейная алгебра — определитель больших матриц: ДОЛЖЕН быть более быстрый способ
ПРЕДУПРЕЖДЕНИЕ это очень длинный отчет и, вероятно, вызовет скуку. Будьте осторожны!!
Я слышал об определителе малых матриц, например:
$$\det \begin{pmatrix} а&б\\ CD\\ \end{pматрица} знак равно ad-bc $$
пример:
$$\det \begin{pматрица} 57 и 48\\ 79&102\\ \end{pматрица} знак равно 57\х 102-48\х 79 =5814-3792 =2022 $$
Это довольно увесистый пример, который я нашел в одной из своих книг о векторах и матрицах. И есть гораздо более сложные примеры. например, чтобы найти определитель матрицы порядка 3, вы делаете это:
$$\begin{align} &\дет \begin{pматрица} а&б&в\\ д&е&е\\ г&ч&я\\ \конец{pmatrix}\\ &=а\раз \дет \begin{bmatrix} д&ф\\ Здравствуй\\ \end{bmatrix}\\ &-б\раз \дет \begin{bmatrix} д&ф\\ г&я\\ \end{bmatrix}\\ &+с\раз \дет \begin{bmatrix} д&е\\ г&ч\\ \end{bmatrix} \end{выравнивание}$$
Эта последовательность выглядит немного простой, но на самом деле она взрывается (становится все больше) через некоторое время.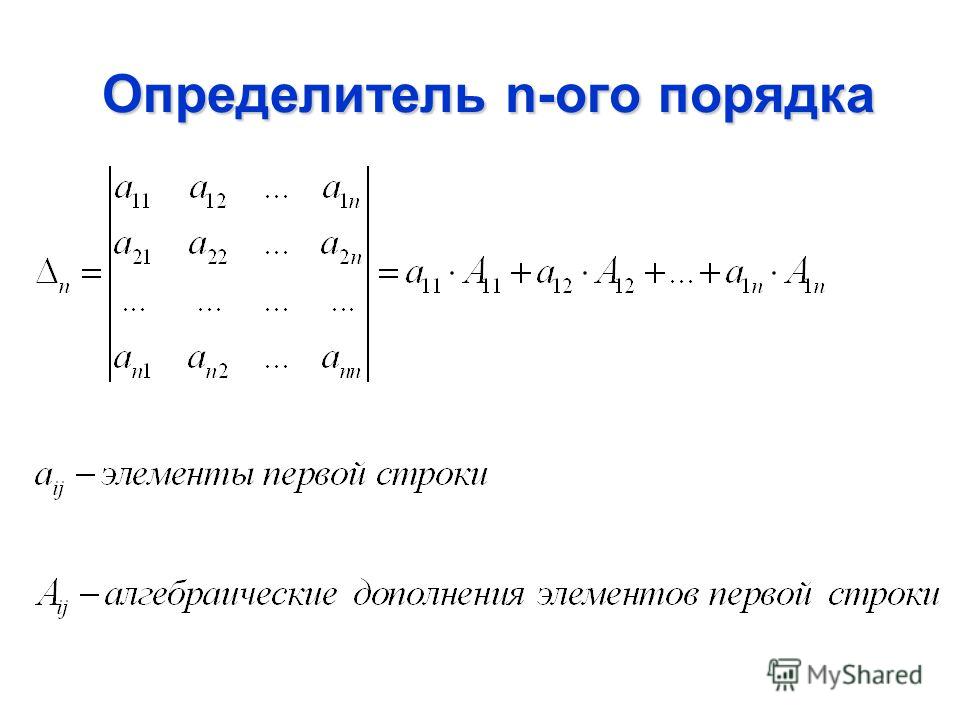 например, с матрицей $5\x 5$ кто-то попросил меня смоделировать, вот как прошло мое «веселое время»:
например, с матрицей $5\x 5$ кто-то попросил меня смоделировать, вот как прошло мое «веселое время»:
$$ \начать{выравнивать} &\дет \begin{Bmatrix} а&б&в&г&д\\ f&g&h&i&j\\ к&л&м&н&о\\ p&q&r&s&t\\ u&v&w&x&y\\ \end{Bmatrix}\\ &=а\раз \дет \begin{Bmatrix} г&ч&и&к\\ л&м&н&о\\ q&r&s&t\\ v&w&x&y\\ \end{Bматрица} -б\раз \дет \begin{Bmatrix} f&h&i&j\\ к&м&н&о\\ п&р&с&т\\ u&w&x&y\\ \end{Bматрица} +с\раз \дет \begin{Bmatrix} ж&г&и&к\\ к&л&н&о\\ p&q&s&t\\ u&v&x&y\\ \end{Bmatrix}\\ &-д\раз \дет \begin{Bmatrix} ж&г&ч&к\\ к&л&м&о\\ p&q&r&t\\ u&v&w&y\\ \end{Bматрица} +е\раз \дет \begin{Bматрица} ж&г&ч&я\\ к&л&м&н\\ p&q&r&s\\ u&v&w&x\\ \end{Bматрица} \end{выравнивание} $$
Это сложная пачка вычислений, которые я должен полностью выполнить. поэтому я разобью его на 5 компонентов: A, B, C, D и E соответственно.
$$ А=а\раз \дет \begin{Bматрица} г&ч&и&к\\ л&м&н&о\\ q&r&s&t\\ v&w&x&y\\ \end{Bматрица} \\ =а\влево( г\раз \дет \begin{Bmatrix} м&н&о\\ р&с&т\\ ш&х&у\\ \end{Bматрица} -ч\раз \дет \begin{Bmatrix} л&н&о\\ q&s&t\\ в&х&у\\ \end{Bматрица} +я\раз \дет \begin{Bматрица} л&м&о\\ q&r&t\\ v&w&y\\ \end{Bматрица} -j\раз \дет \begin{Bmatrix} л&м&н\\ вопросы\\ v&w&x\\ \end{Bматрица} \Правильно)\\ =а\влево( г\влево( м\раз \дет \begin{Bmatrix} т&т\\ х&у\\ \end{Bматрица} -n\раз \дет \begin{Bmatrix} р&т\\ ж&г\\ \end{Bматрица} +о\раз \дет \begin{Bmatrix} р&с\\ ж&х\\ \end{Bматрица} \Правильно)\\ -ч\влево( л\раз \дет \begin{Bmatrix} т&т\\ х&у\\ \end{Bматрица} -n\раз \дет \begin{Bматрица} q&t\\ v&y\\ \end{Bматрица} +о\раз \дет \begin{Bматрица} вопросы\\ в&х\\ \end{Bматрица} \Правильно)\\ +я\влево( л\раз \дет \begin{Bматрица} р&т\\ ж&г\\ \end{Bматрица} -м\раз \дет \begin{Bматрица} q&t\\ v&y\\ \end{Bматрица} +о\раз \дет \begin{Bматрица} q&r\\ v&w\\ \end{Bматрица} \Правильно) -j\влево( л\раз \дет \begin{Bматрица} р&с\\ ж&х\\ \end{Bматрица} -м\раз \дет \begin{Bматрица} вопросы\\ в&х\\ \end{Bматрица} +n\раз \дет \begin{Bmatrix} q&r\\ v&w\\ \end{Bматрица} \Правильно) \Правильно)\\ =а\влево( g\left(m(sy-xt)-n(ry-wt)+o(rx-ws)\right)\\ -h\влево(l(sy-xt)-n(qy-vt)+o(qx-vs)\вправо)\\ +i\left(l(ry-wt)-m(qy-vt)+o(qw-vr)\right)\\ -j\влево(l(rx-ws)-m(qx-vs)+n(qw-vr)\вправо) \Правильно) $$
(Если вы хотите увидеть этого бегемота в кодовой форме, перейдите на эту страницу, но я не уверен на $100$%, что это сработает. )
)
$$ Б= -б\раз \дет \begin{Bmatrix} f&h&i&j\\ к&м&н&о\\ п&р&с&т\\ u&w&x&y\\ \end{Bmatrix}\\ -б\влево( ф\раз \дет \begin{Bmatrix} м&н&о\\ р&с&т\\ ш&х&у\\ \end{Bматрица} -ч\раз \дет \begin{Bmatrix} к&н&о\\ Тихоокеанское стандартное время\\ у&х&у\\ \end{Bматрица} +я\раз \дет \begin{Bmatrix} к&м&о\\ п&р&т\\ u&w&y\\ \end{Bматрица} -j\раз \дет \begin{Bmatrix} к&м&н\\ p&r&s\\ u&w&x\\ \end{Bматрица} \Правильно)\\ =-b\влево( ж\влево( м\раз \дет \begin{Bmatrix} т&т\\ х&у\\ \end{Bматрица} -n\раз \дет \begin{Bmatrix} р&т\\ ж&г\\ \end{Bматрица} +о\раз \дет \begin{Bmatrix} р&с\\ ж&х\\ \end{Bматрица} \Правильно)\\ -ч\влево( к\раз \дет \begin{Bmatrix} т&т\\ х&у\\ \end{Bматрица} -n\раз \дет \begin{Bmatrix} п&т\\ у&у\\ \end{Bматрица} +о\раз \дет \begin{Bmatrix} p&s\\ у&х\\ \end{Bматрица} \Правильно)\\ +я\влево( к\раз \дет \begin{Bmatrix} р&т\\ ж&г\\ \end{Bматрица} -м\раз \дет \begin{Bmatrix} п&т\\ у&у\\ \end{Bматрица} +о\раз \дет \begin{Bmatrix} п&р\\ u&w\\ \end{Bматрица} \Правильно) -j\влево( к\раз \дет \begin{Bmatrix} р&с\\ ж&х\\ \end{Bматрица} -м\раз \дет \begin{Bmatrix} p&s\\ у&х\\ \end{Bматрица} +n\раз \дет \begin{Bmatrix} п&р\\ u&w\\ \end{Bматрица} \Правильно) \Правильно)\\ =-b\влево( f\left(m(sy-xt)-n(ry-wt)+o(rx-ws)\right)\\ -h\left(k(sy-xt)-n(py-ut)+o(px-us)\right)\\ +i\left(k(ry-wt)-m(py-ut)+o(pw-ur)\right)\\ -j\left(k(rx-ws)-m(px-us)+n(pw-ur)\right) \Правильно) $$
и это часть б! это изнурительный объем кода для меня. $\frac{3}{5}$ путь…
$\frac{3}{5}$ путь…
$$ С=с\раз \дет \begin{Bmatrix} ж&г&и&к\\ к&л&н&о\\ p&q&s&t\\ u&v&x&y\\ \end{Bmatrix}\\ =с\влево( ф\раз \дет \begin{Bmatrix} л&н&о\\ q&s&t\\ в&х&у\\ \end{Bматрица} -г\раз \дет \begin{Bmatrix} к&н&о\\ Тихоокеанское стандартное время\\ у&х&у\\ \end{Bматрица} +я\раз \дет \begin{Bmatrix} к&л&о\\ p&q&t\\ u&v&y\\ \end{Bматрица} -j\раз \дет \begin{Bmatrix} к&л&н\\ p&q&s\\ у&в&х\\ \end{Bматрица} \Правильно)\\ =с\влево( ж\влево( л\раз \дет \begin{Bmatrix} т&т\\ х&у\\ \end{Bматрица} -n\раз \дет \begin{Bmatrix} q&t\\ v&y\\ \end{Bматрица} +о\раз \дет \begin{Bmatrix} вопросы\\ в&х\\ \end{Bматрица} \Правильно)\\ -г\влево( к\раз \дет \begin{Bmatrix} т&т\\ х&у\\ \end{Bматрица} -n\раз \дет \begin{Bmatrix} п&т\\ у&у\\ \end{Bматрица} +о\раз \дет \begin{Bmatrix} p&s\\ у&х\\ \end{Bматрица} \Правильно)\\ +я\влево( к\раз \дет \begin{Bmatrix} q&t\\ v&y\\ \end{Bматрица} -l\раз \дет \begin{Bmatrix} п&т\\ у&у\\ \end{Bматрица} +о\раз \дет \begin{Bmatrix} p&q\\ у&в\\ \end{Bматрица} \Правильно)\\ -j\влево( к\раз \дет \begin{Bmatrix} вопросы\\ в&х\\ \end{Bматрица} -l\раз \дет \begin{Bmatrix} p&s\\ у&х\\ \end{Bматрица} +n\раз \дет \begin{Bmatrix} p&q\\ у&в\\ \end{Bматрица} \Правильно) \Правильно)\\ =с\влево( f\left(l(sy-xt)-n(qy-vt)+o(qx-vs)\right)\\ -g\left(k(sy-xt)-n(py-ut)+o(px-us)\right)\\ +i\left(k(qy-vt)-l(py-ut)+o(pv-uq)\right)\\ -j\влево(k(qx-vs)-l(px-us)+n(pv-uq)\вправо) \Правильно) $$
Это кесарево сечение.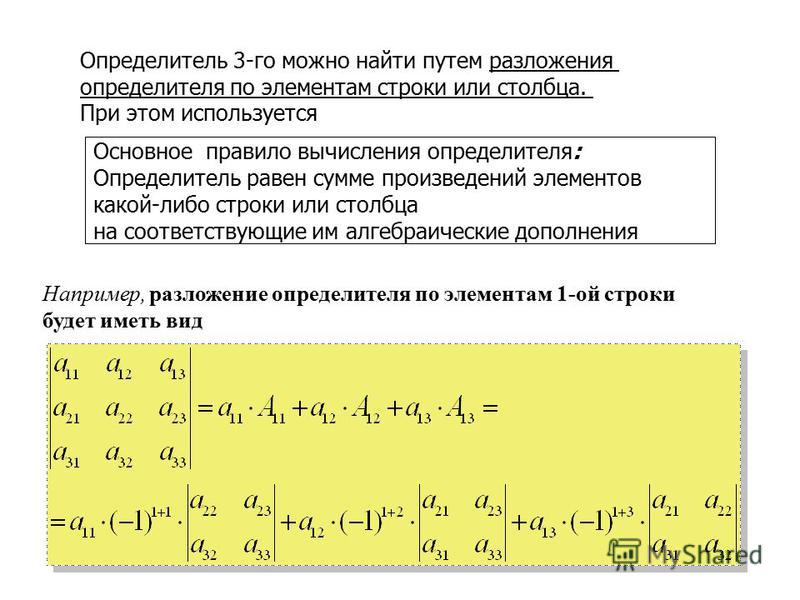 теперь, чтобы добраться до секции D…
теперь, чтобы добраться до секции D…
$$ Д=-д\раз \дет \begin{Bmatrix} ж&г&ч&к\\ к&л&м&о\\ p&q&r&t\\ u&v&w&y\\ \end{Bmatrix}\\ =-d\влево( ф\раз \дет \begin{Bmatrix} л&м&о\\ q&r&t\\ v&w&y\\ \end{Bматрица} -г\раз \дет \begin{Bmatrix} к&м&о\\ п&р&т\\ u&w&y\\ \end{Bматрица} +ч\раз \дет \begin{Bmatrix} к&л&о\\ p&q&t\\ u&v&y\\ \end{Bматрица} -j\раз \дет \begin{Bmatrix} к&л&м\\ p&q&r\\ u&v&w\\ \end{Bматрица} \Правильно)\\ =-d\влево( ж\влево( л\раз \дет \begin{Bmatrix} р&т\\ ж&г\\ \end{Bматрица} -м\раз \дет \begin{Bmatrix} q&t\\ v&y\\ \end{Bматрица} +о\раз \дет \begin{Bmatrix} q&r\\ v&w\\ \end{Bматрица} \Правильно)\\ -г\влево( к\раз \дет \begin{Bmatrix} р&т\\ ж&г\\ \end{Bматрица} -м\раз \дет \begin{Bmatrix} п&т\\ у&у\\ \end{Bматрица} +о\раз \дет \begin{Bmatrix} п&р\\ u&w\\ \end{Bматрица} \Правильно)\\ +ч\влево( к\раз \дет \begin{Bmatrix} q&t\\ v&y\\ \end{Bматрица} -l\раз \дет \begin{Bmatrix} п&т\\ у&у\\ \end{Bматрица} +о\раз \дет \begin{Bmatrix} p&q\\ у&в\\ \end{Bматрица} \Правильно)\\ -j\влево( к\раз \дет \begin{Bmatrix} q&r\\ v&w\\ \end{Bматрица} -l\раз \дет \begin{Bmatrix} п&р\\ u&w\\ \end{Bматрица} +м\раз \дет \begin{Bmatrix} p&q\\ у&в\\ \end{Bматрица} \Правильно) \Правильно)\\ =-d\влево( f\left(l(ry-wt)-m(qy-vt)+o(qw-vr)\right)\\ -g\left(k(ry-wt)-m(py-ut)+o(pw-ur)\right)\\ +h\влево(k(qy-vt)-l(py-ut)+o(pv-uq)\вправо)\\ -j\влево(k(qw-vr)-l(pw-ur)+m(pv-uq)\вправо) \Правильно) $$
Вам уже скучно? Я. К счастью, у меня остался еще один раздел…
К счастью, у меня остался еще один раздел…
$$ Е=е\раз \дет \begin{Bmatrix} ж&г&ч&я\\ к&л&м&н\\ p&q&r&s\\ u&v&w&x\\ \end{Bматрица} =е\влево( ф\раз \дет \begin{Bmatrix} л&м&н\\ вопросы\\ v&w&x\\ \end{Bматрица} -г\раз \дет \begin{Bmatrix} к&м&н\\ p&r&s\\ u&w&x\\ \end{Bматрица} +ч\раз \дет \begin{Bmatrix} к&л&н\\ p&q&s\\ у&в&х\\ \end{Bматрица} -i\раз \дет \begin{Bmatrix} к&л&м\\ p&q&r\\ u&v&w\\ \end{Bматрица} \Правильно)\\ =е\влево( ж\влево( л\раз \дет \begin{Bmatrix} р&с\\ ж&х\\ \end{Bматрица} -м\раз \дет \begin{Bmatrix} вопросы\\ в&х\\ \end{Bматрица} +n\раз \дет \begin{Bmatrix} q&r\\ v&w\\ \end{Bматрица} \Правильно)\\ -г\влево( к\раз \дет \begin{Bmatrix} р&с\\ ж&х\\ \end{Bматрица} -м\раз \дет \begin{Bmatrix} p&s\\ у&х\\ \end{Bматрица} +n\раз \дет \begin{Bmatrix} п&р\\ u&w\\ \end{Bматрица} \Правильно)\\ +ч\влево( к\раз \дет \begin{Bmatrix} вопросы\\ в&х\\ \end{Bматрица} -l\раз \дет \begin{Bmatrix} p&s\\ у&х\\ \end{Bматрица} +n\раз \дет \begin{Bmatrix} p&q\\ у&в\\ \end{Bматрица} \Правильно)\\ -Я ушел( к\раз \дет \begin{Bmatrix} q&r\\ v&w\\ \end{Bматрица} -l\раз \дет \begin{Bmatrix} п&р\\ u&w\\ \end{Bматрица} +м\раз \дет \begin{Bmatrix} p&q\\ у&в\\ \end{Bматрица} \Правильно) \Правильно)\\ =е\влево( f\left(l(rx-ws)-m(qx-vs)+n(qw-vr)\right)\\ -g\left(k(rx-ws)-m(px-us)+n(pw-ur)\right)\\ +h\влево(k(qx-vs)-l(px-us)+n(pv-uq)\вправо)\\ -i\left(k(qw-vr)-l(pw-ur)+m(pv-uq)\right) \Правильно) $$
ЗЗЗЗЗЗЗЗЗЗЗЗ.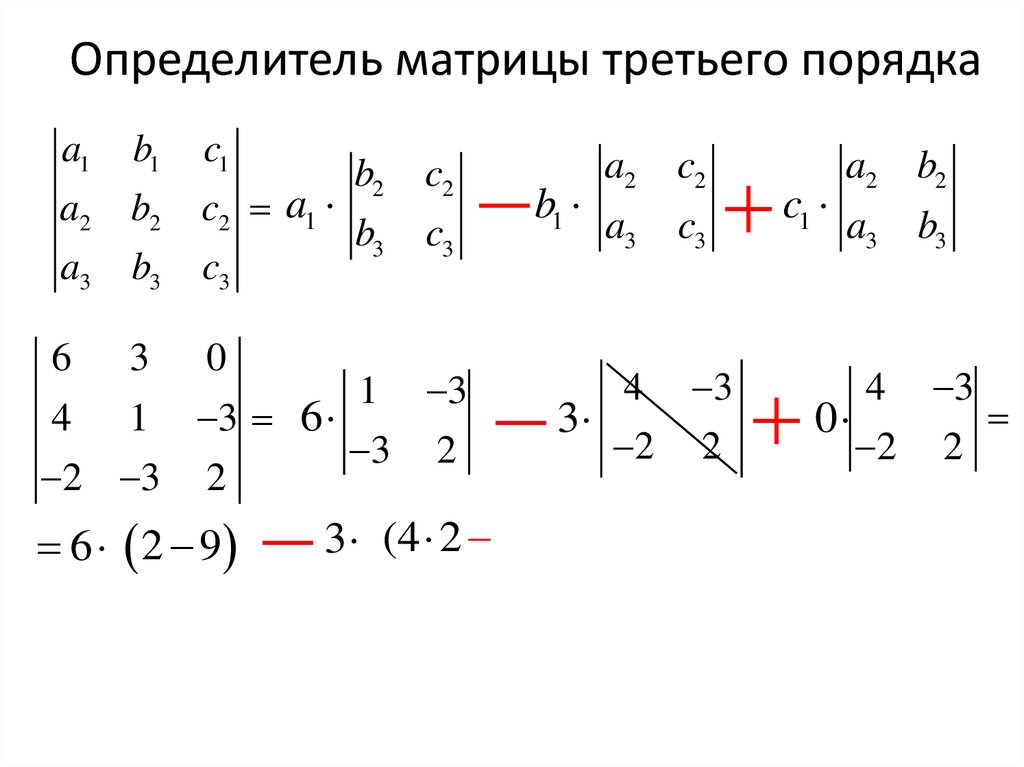 .. ГАХ! хорошо… вкратце:
.. ГАХ! хорошо… вкратце:
$$ \дет \begin{Bmatrix} а&б&в&г&д\\ f&g&h&i&j\\ к&л&м&н&о\\ p&q&r&s&t\\ u&v&w&x&y\\ \end{Bmatrix}\\ =а\влево( g\left(m(sy-xt)-n(ry-wt)+o(rx-ws)\right)\\ -h\влево(l(sy-xt)-n(qy-vt)+o(qx-vs)\вправо)\\ +i\left(l(ry-wt)-m(qy-vt)+o(qw-vr)\right)\\ -j\влево(l(rx-ws)-m(qx-vs)+n(qw-vr)\вправо) \Правильно)\\ -б\влево( f\left(m(sy-xt)-n(ry-wt)+o(rx-ws)\right)\\ -h\left(k(sy-xt)-n(py-ut)+o(px-us)\right)\\ +i\left(k(ry-wt)-m(py-ut)+o(pw-ur)\right)\\ -j\left(k(rx-ws)-m(px-us)+n(pw-ur)\right) \Правильно)\\ +с\влево( f\left(l(sy-xt)-n(qy-vt)+o(qx-vs)\right)\\ -g\left(k(sy-xt)-n(py-ut)+o(px-us)\right)\\ +i\left(k(qy-vt)-l(py-ut)+o(pv-uq)\right)\\ -j\влево(k(qx-vs)-l(px-us)+n(pv-uq)\вправо) \Правильно)\\ -d\влево( f\left(l(ry-wt)-m(qy-vt)+o(qw-vr)\right)\\ -g\left(k(ry-wt)-m(py-ut)+o(pw-ur)\right)\\ +h\влево(k(qy-vt)-l(py-ut)+o(pv-uq)\вправо)\\ -j\влево(k(qw-vr)-l(pw-ur)+m(pv-uq)\вправо) \Правильно)\\ +е\влево( f\left(l(rx-ws)-m(qx-vs)+n(qw-vr)\right)\\ -g\left(k(rx-ws)-m(px-us)+n(pw-ur)\right)\\ +h\влево(k(qx-vs)-l(px-us)+n(pv-uq)\вправо)\\ -i\left(k(qw-vr)-l(pw-ur)+m(pv-uq)\right) \Правильно) $$
Теперь, когда ЭТО ЗАКОНЧИЛОСЬ ( ПРЕКРАЩАЙТЕСЬ !! ), я должен сказать, что я взорвал мозг моему другу, показав ему это.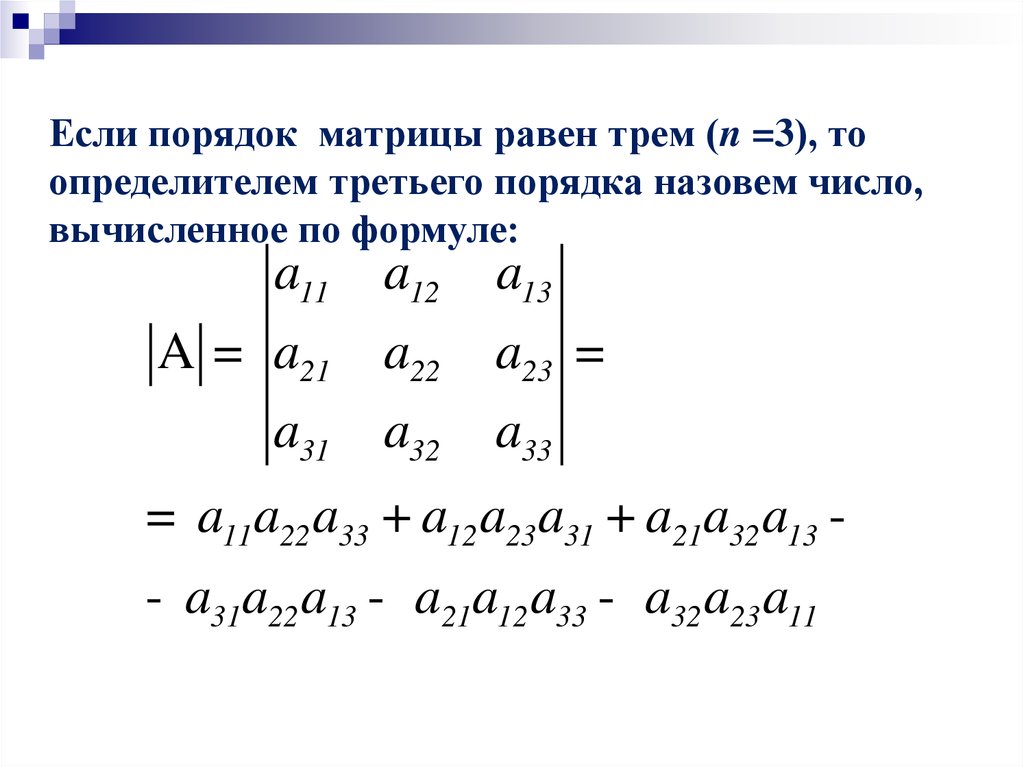 ТЕПЕРЬ он хочет, чтобы я вычислил матрицу 10-го порядка. У МЕНЯ НЕТ ВРЕМЕНИ!!!! Поэтому мне интересно, есть ли более быстрый способ вычислить определитель ОГРОМНОЙ матрицы. надеюсь есть. Заранее спасибо.
ТЕПЕРЬ он хочет, чтобы я вычислил матрицу 10-го порядка. У МЕНЯ НЕТ ВРЕМЕНИ!!!! Поэтому мне интересно, есть ли более быстрый способ вычислить определитель ОГРОМНОЙ матрицы. надеюсь есть. Заранее спасибо.
РЕДАКТИРОВАТЬ я разговаривал со своим другом, объясняя, как тратится время на вычисление матрицы 10-го порядка, и я убедил его отказаться от идеи «сделать вручную» и вместо этого сделать это на компьютере.
линейная алгебра — самый простой способ найти характеристический многочлен для этой матрицы 4×4
Задавать вопрос
Спросил
Изменено 5 лет, 5 месяцев назад
Просмотрено 26 тысяч раз
$\begingroup$
Мне дали матрицу
$$
\begin{bmatrix}
1 и 3 и 0 и 3 \\
1 и 1 и 1 и 1 \\
0 и 4 и 2 и 8 \\
2 и 0 и 3 и 1 \\
\end{bmatrix}
$$ 92 + 58\лямбда — 8$.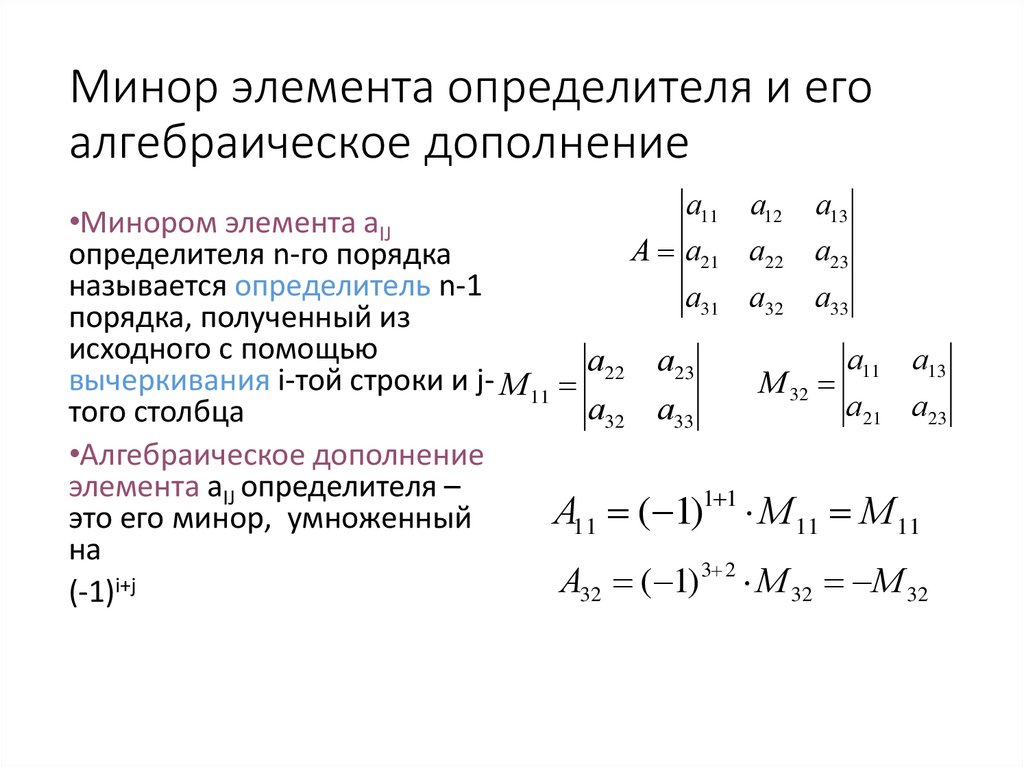 Однако это занимает несколько страниц работы, и я продолжаю делать ошибки в вычислениях и в итоге получаю неправильный ответ.
Однако это занимает несколько страниц работы, и я продолжаю делать ошибки в вычислениях и в итоге получаю неправильный ответ.
Мой вопрос: есть ли более простой способ найти определитель этой конкретной матрицы или, как только определитель найден, умножить результат, чтобы найти многочлен?
Единственные методы, которым меня научили, заключались в том, чтобы либо попытаться найти или создать строку с несколькими нулями, чтобы упростить расширение кофактора, либо получить верхнюю или нижнюю треугольную матрицу, однако здесь они кажутся столь же беспорядочными.
- линейная алгебра
- матрицы
- определитель
$\endgroup$
1
$\begingroup$
Для удобства я пишу $t$ вместо $\lambda$. Назовите матричное выражение $M-t I$. Разделите третью строку на 2, поменяйте местами столбцы 1 и 2 и умножьте третий столбец на 2, вы получите
$$
\det(M-t I)=
-\det\left[\begin{массив}{cc|cc}
3 и 1-т и 0 и 3\\
1-т и 1 и 2 и 1\\
\hline
2 и 0 и 2-т и 4\\
0 и 2 и 6 и 1-т
\конец{массив}\справа]
=-\det\left[\begin{array}{c|c}A&B\\ \hline C&D\end{массив}\right],
$$
где ведущий знак минус связан с перестановкой столбцов.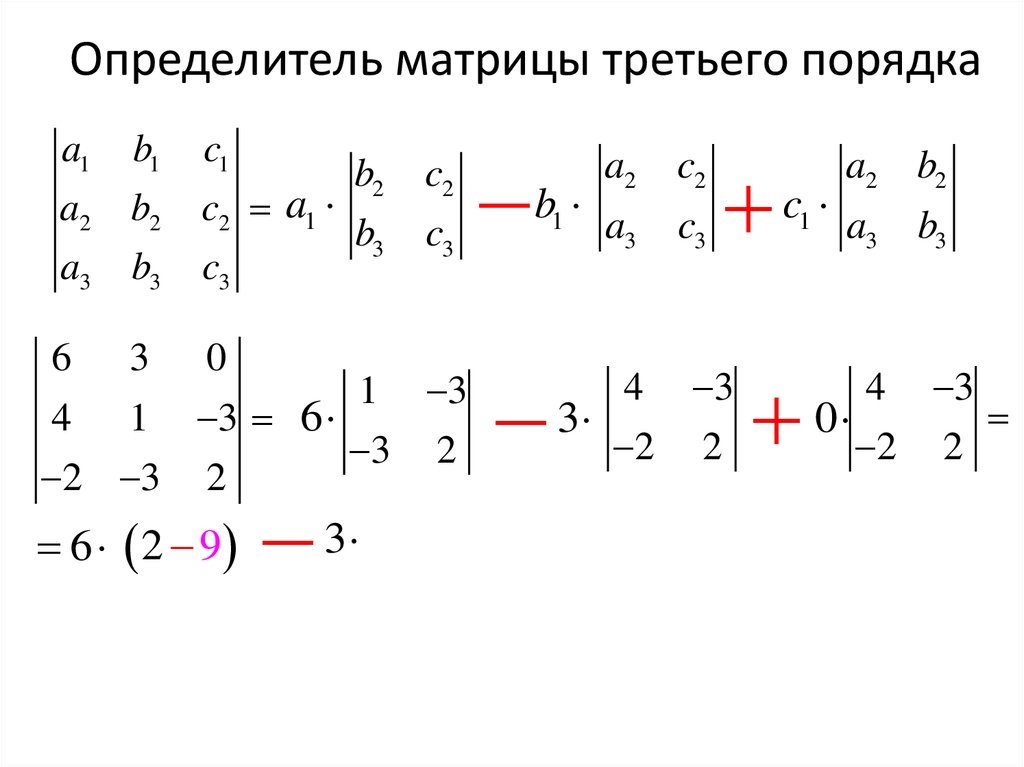 {2} + 3 & т — 1 & т + 2 \\
4&-т+2&8\
2 \, т — 2 & 1 & -т — 1
\конец{массив}\справа]
\конец{выравнивание*}
Это дает относительно простой способ уменьшить ваш определитель $4\times 4$ до определителя $3\times 3$.
{2} + 3 & т — 1 & т + 2 \\
4&-т+2&8\
2 \, т — 2 & 1 & -т — 1
\конец{массив}\справа]
\конец{выравнивание*}
Это дает относительно простой способ уменьшить ваш определитель $4\times 4$ до определителя $3\times 3$.
$\endgroup$
$\begingroup$
Поменяйте местами первые два и два последних столбца (цель — сокращение строк). Два минуса компенсируются, поэтому определитель не меняется.
\begin{bmatrix}
3&1-\лямбда&3&0\\
1-\лямбда& 1 & 1 &1\\
4&0 и 8&2-\лямбда\\
0&2 & 1-\лямбда&3 \\
\end{bmatrix}
В настоящее время
$$
\begin{bmatrix}
3&1-\лямбда&3&0\\
1-\лямбда& 1 & 1 &1\\
4&0 и 8&2-\лямбда\\
0&2 & 1-\лямбда&3 \\
\end{bmatrix}
=3\,\begin{bmatrix}
1&(1-\лямбда)/3 & 1 & 0 \\
1-\лямбда& 1 & 1 &1\\
4&0 и 8&2-\лямбда\\
0&2 & 1-\лямбда&3 \\
\end{bmatrix}
$$
Затем вычтите $1-\lambda$, умноженное на первую строку, из второй и в четыре раза, умноженную на первую, из третьей:
$$
3\,\begin{bmatrix}
1&(1-\лямбда)/3 & 1 & 0 \\
0& 1-(1-\лямбда)^2/3 & \лямбда &1\\
0&-4(1-\лямбда)/3 и 4&2-\лямбда\\
0&2 & 1-\лямбда&3 \\
\end{bmatrix}
=3\,\begin{bmatrix}
1-(1-\лямбда)^2/3 и \лямбда &1\\
-4(1-\лямбда)/3 и 4&2-\лямбда\\
2 и 1-\лямбда&3 \\
\end{bmatrix}
$$
Затем вычтите $2-\lambda$, умноженное на первую строку, из второй и трижды, умноженную на первую строку, из третьей:
$$
3\,\begin{bmatrix}
1-(1-\лямбда)^2/3 и \лямбда &1\\
-4(1-\лямбда)/3-(2-\лямбда)(1-(1-\лямбда)^2/3) и 4-\лямбда(2-\лямбда)&0\\
-1+(1-\лямбда)^2 и 1-4\лямбда&0 \\
\end{bmatrix}
$$
Определитель $2\times2$ теперь можно вычислить напрямую, чтобы получить
$$
3\лямбда^4-15\лямбда^3-84\лямбда^2+174\лямбда-24. $$
$$
$\endgroup$
Твой ответ
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но никогда не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
разложений Лапласа для определителя
Используя определение определителя, в Примере 5 было получено следующее выражение:
Это уравнение можно переписать следующим образом:
Каждый член справа имеет следующую форму:
В частности, обратите внимание, что
Если A = [ a ij ] является матрицей n x n , то определитель ( n — 1) x ( n — 1) матрица, которая остается после удаления строки и столбца, содержащих запись a ij , называется иж ). If the a ij minor is multiplied by (−1) i + j , he result is called the a ij cofactor , denoted cof( a ij ). То есть
Используя эту терминологию, приведенное выше уравнение для определителя матрицы 3 x 3 A равно сумме произведений элементов первой строки и их сомножителей:
Это называется расширением Лапласа по первой строке. Можно также показать, что определитель равен разложению Лапласа по второй строке,
Можно также показать, что определитель равен разложению Лапласа по второй строке,
или по третьему ряду ,
Верно даже больше. Определитель также равен разложению Лапласа по первому столбцу
по второму столбцу или по третьему столбцу. Хотя формула разложения Лапласа для определителя была явно проверена только для матрицы 3×3 и только для первой строки, можно доказать, что определитель любой матрицы nxn равен разложению Лапласа по любой строке или любому столбцу .
Пример 1 : Оцените определитель следующей матрицы, используя разложение Лапласа по второму столбцу:
Записи во втором столбце: a 12 = −1, a 22 = 2, и a 32 = 0. Миноры этих записей, mnr( ), mnr( a 22 ) и mnr( a 32 ) вычисляются следующим образом:
Поскольку кофакторы записей второго столбца равны
расширение Лапласа по второму столбцу становится
Обратите внимание, что не нужно было вычислять минор или сомножитель записи (3, 2) в A , так как эта запись была равна 0. В общем случае при вычислении определителя методом разложения Лапласа выберите строку или столбец с наибольшим количеством нулей. Миноры этих записей не нужно оценивать, потому что они ничего не дадут в определителе.
В общем случае при вычислении определителя методом разложения Лапласа выберите строку или столбец с наибольшим количеством нулей. Миноры этих записей не нужно оценивать, потому что они ничего не дадут в определителе.
Коэффициент (−1) i + j , которое умножает на ij минор, чтобы получить кофактор a ij , приводит к шахматной схеме знаков; каждый знак дает значение этого фактора при вычислении кофактора a ij из минора a ij . Например, шахматная доска для матрицы 3 х 3 выглядит так:
.
Для матрицы 4 x 4 шахматная доска имеет форму
и так далее.
Пример 2 : Вычислите определитель следующей матрицы:
Сначала найдите строку или столбец с наибольшим количеством нулей. Здесь это третья строка, содержащая два нуля; разложение Лапласа по этой строке будет содержать только два ненулевых члена.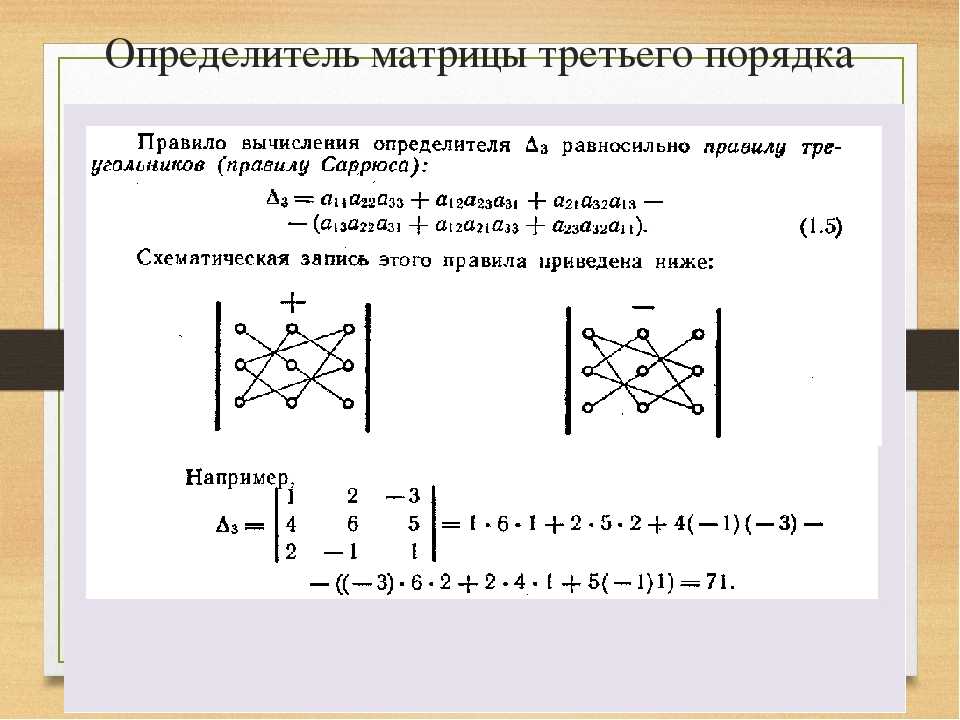 Шаблон шахматной доски, показанный выше для матрицы 4 на 4, подразумевает, что минор записи a 31 = 1 будет умножен на +1, а минор записи a 34 = 2 будет умножено на −1, чтобы получить соответствующие кофакторы:
Шаблон шахматной доски, показанный выше для матрицы 4 на 4, подразумевает, что минор записи a 31 = 1 будет умножен на +1, а минор записи a 34 = 2 будет умножено на −1, чтобы получить соответствующие кофакторы:
Теперь каждый из этих кофакторов, которые сами по себе являются детерминантами, можно оценить с помощью разложения Лапласа. Расширение по третьему столбцу,
Другой кофактор оценивается путем расширения его первой строки:
Следовательно, вычисление det A с помощью разложения Лапласа по третьей строке A дает
Example 3 : The cross product of two 3‐vectors, x = x 1 i + x 2 j + x 3 k and y = y 1 I + Y 2 J + Y 3 K , это легче оценивать, чтобы выполнить LAPLACE ESTING OF SYSTION SYSTORION.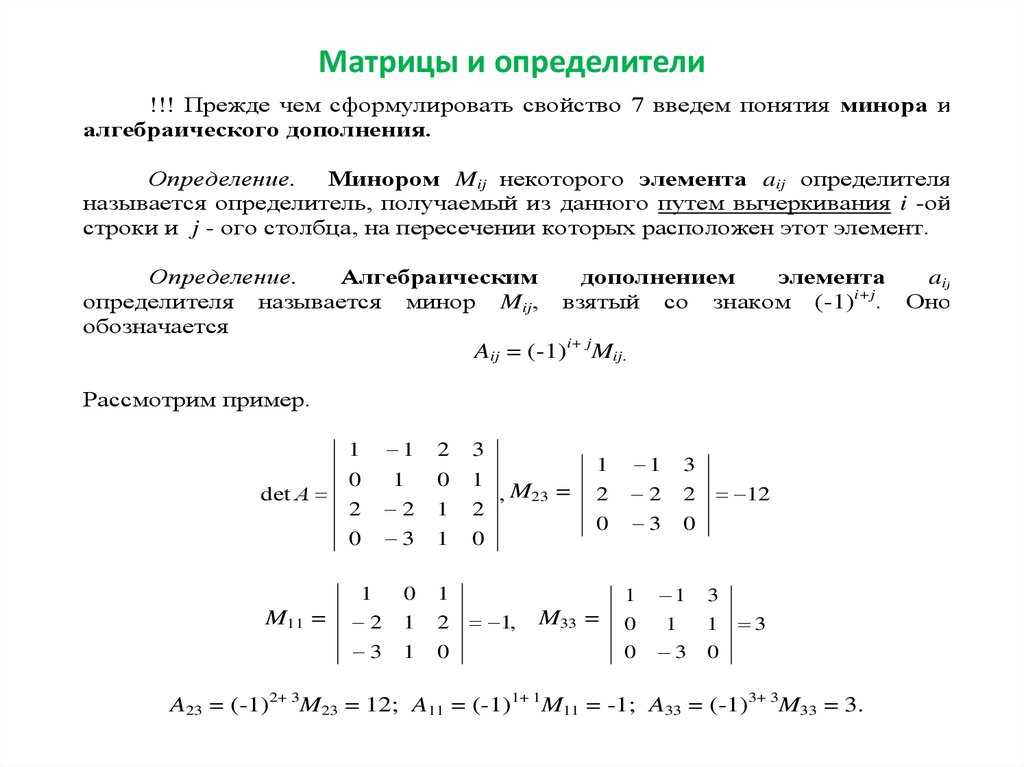 0007
0007
Это расширение дает
Для иллюстрации, векторное произведение векторов x = 3 j − 3 k и y = −2 i + 2 j − k
равно7.
Пример 4 : Есть ли связь между определителем числа A T и определителем числа A ?
В случае 2 на 2 легко видеть, что det ( А Т ) = дет А :
В случае 3 на 3 разложение Лапласа по первой строке числа A дает тот же результат, что и разложение Лапласа по первому столбцу числа A T , подразумевая, что det ( A T ) = det A :
Начиная с расширения
для определителя, нетрудно привести общее доказательство того, что det ( А Т ) = дет А .
Пример 5 : Примените результат det ( A T ) = det A для вычисления
при том, что
(где a, e, g, n, o, p и r — скаляры).
Поскольку замена одной строки меняет знак определителя (Свойство 2), замена двух строк,
оставит определитель без изменений:
Но определитель матрицы равен определителю ее транспонирования, поэтому
Следовательно,
Пример 7 : Учитывая, что числа 1547, 2329, 3893 и 4471 делятся на 17, докажите, что определитель числа
также делится на 17 без фактического вычисления.
Из-за результата det ( A T ) = det A каждое свойство определителя, которое включает строки из A подразумевает другое свойство определителя, включающее столбцы A . Например, определитель является линейным в каждом столбце , меняет знак, если два столбца меняются местами, не изменяется, если число, кратное одному столбцу , добавляется к другому столбцу , и так далее.
Для начала умножьте первый столбец А на 1000, второй столбец на 100 и третий столбец на 10. Определитель полученной матрицы будет в 1000·100·10 раз больше определителя А :
Затем добавьте второй, третий и четвертый столбцы этой новой матрицы к ее первому столбцу. Ни одна из этих операций со столбцами не изменяет определитель; таким образом,
Поскольку каждый элемент в первом столбце этой последней матрицы делится на 17, каждый член разложения Лапласа по первому столбцу будет делиться на 17, и, таким образом, сумма этих членов, которая дает определитель, будет делиться на 17. 17. Так как 17 делит 10 6 det A , 17 должно делить det A , потому что 17 простое число и не делит 10 6 .
Пример 7 : Полезным понятием в многомерном исчислении (например, в связи с формулой замены переменных для кратных интегралов) является понятие Якобиана отображения. Пусть x и y заданы как функции независимых переменных u и v :
Пусть x и y заданы как функции независимых переменных u и v :
Якобиан отображения ( u, v ) ↦ ( x, y ), величина, обозначаемая символом δ( x, y )/δ( u, v ), определяется как следующий определитель:
Для иллюстрации рассмотрим преобразование полярных координат ,
Якобиан этого отображения ( r , θ) ↦ ( x, y ) равен
.Тот факт, что якобиан этого преобразования равен r учитывает коэффициент r в известной формуле
, где R ′ представляет собой область в плоскости r −θ, отображаемую (*) в область интегрирования R в плоскости x−y .
Якобиан также может быть расширен до трех переменных. Например, точку в трехмерном пространстве можно задать, задав ее 90 168 сферических координат 90 169 —ϕ и θ, которые связаны с обычными прямоугольными координатами — x, y и z — по уравнениям
См. рис.
рис.
Рисунок 1
Якобиан отображения (ρ, ϕ, θ) ↦ ( x, y, z ) равен
Разложением Лапласа по третьему ряду,
Тот факт, что якобиан этого преобразования равен ρ 2 sin ϕ, объясняет множитель ρ 2 sin ϕ в формуле замены переменных в тройном интеграле от прямоугольных координат к сферическим:
Расширения Лапласа после сокращения строк . Полезность метода разложения Лапласа для вычисления определителя повышается, когда ему предшествуют элементарные операции со строками. Если такие операции выполняются над матрицей, количество нулей в данном столбце может быть увеличено, тем самым уменьшая количество ненулевых членов в разложении Лапласа вдоль этого столбца.
Пример 8 : Вычисление определителя матрицы
Следующие операции редукции строк, поскольку они просто включают добавление кратного числа одной строки к другой, не изменяют значение определителя:
Теперь, когда определитель этой последней матрицы вычисляется с использованием разложения Лапласа по первому столбцу, остается только один ненулевой член:
Следовательно, det A = −5.