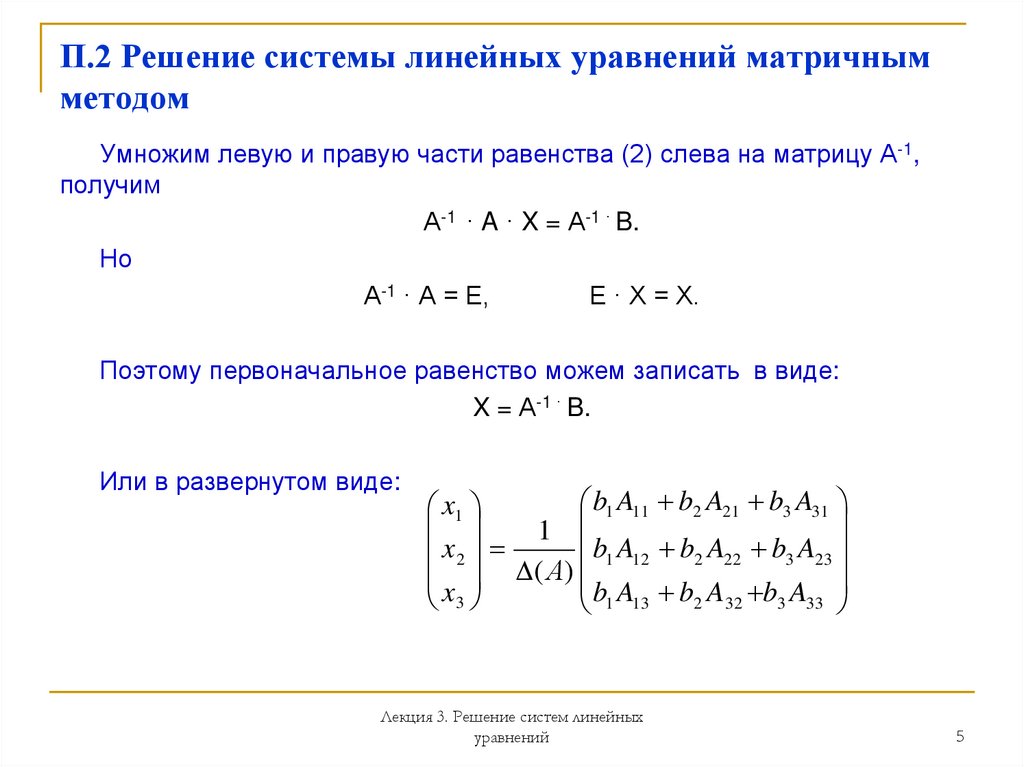
Обратная матрица методом Гаусса | Численные методы на Python
Для получения матрицы будем исходить из того, что она является решением уравнения , где — единичная матрица. Представим искомую матрицу как набор векторов-столбцов img а единичную матрицу как набор единичных векторов img Матричное уравнение в соответствии с правилами умножения матриц возможно заменить не связанной между собой системой уравнений img Каждое из этих уравнений может быть решено методом Гаусса. Заметим то обстоятельство, что все СЛАУ имеют одну и ту же матрицу коэффициентов, поэтому
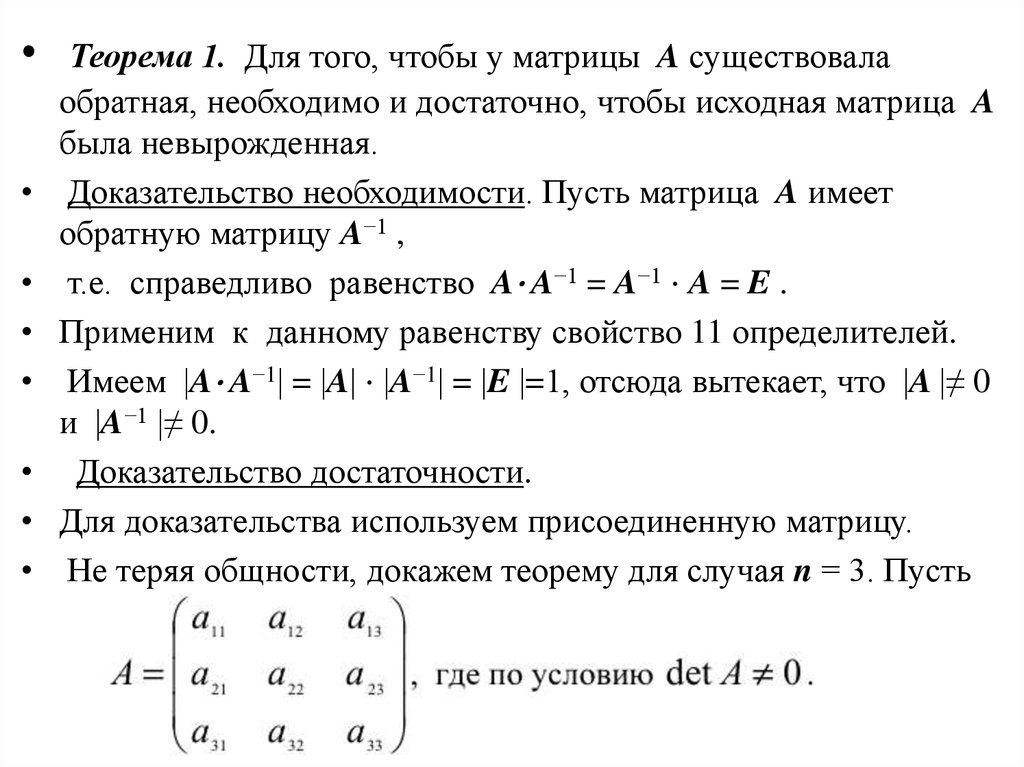
Суть метода Гаусса-Жордана заключается в том, что если с единичной матрицей провести элементарные преобразования, которыми невырожденная квадратная матрица приводится к , то получится обратная матрица .
Для отображения всех элементарных преобразований, совершающихся над матрицей , на единичную матрицу , удобно «склеить» две матрицы в одну. Если матрицы и имели размер , то склеенная матрица будет иметь размер . Таким образом, все преобразования над матрицей (перестановка строк, умножение строки на константу) будут автоматически совершаться и над единичной матрицей). Обозначим склеенную матрицу как
Приведение матрицы к единичной совершается в два этапа: на первом этапе будем двигаться «сверху-вниз», получая в итоге треугольную матрицу, с единицами на главной диагонали и нулями ниже. На втором этапе будем двигаться «снизу-вверх», преобразуя элементы, лежащие выше главной диагонали к нулю, тем самым добиваясь единичной матрицы в результате.
Таким образом, все преобразования над матрицей (перестановка строк, умножение строки на константу) будут автоматически совершаться и над единичной матрицей). Обозначим склеенную матрицу как
Приведение матрицы к единичной совершается в два этапа: на первом этапе будем двигаться «сверху-вниз», получая в итоге треугольную матрицу, с единицами на главной диагонали и нулями ниже. На втором этапе будем двигаться «снизу-вверх», преобразуя элементы, лежащие выше главной диагонали к нулю, тем самым добиваясь единичной матрицы в результате.
Прямой ход
Пусть матрица имеет размер . Тогда на первом этапе будет совершено шагов. На каждом шаге необходимо совершить три действия.
- Поменять местами строки и , в случае если . Этот шаг необходим для исключения ситуации нахождения на главной диагонали 0.
- Преобразовать элемент, стоящий на главной диагонали к 1. Для этого необохдимо домножить всю строку на .
- Обнулить все нижележащие элементы столбца.
 Для этого вычтем из каждой нижележащей строки c индексом результат умножения элемента c текущей строкой. Напомним, что в результате шага 2 первый элемент 1, поэтому первым элементом вычитаемой строки будет являться значение первого элемента строки , что и даст 0 в элементе
Для этого вычтем из каждой нижележащей строки c индексом результат умножения элемента c текущей строкой. Напомним, что в результате шага 2 первый элемент 1, поэтому первым элементом вычитаемой строки будет являться значение первого элемента строки , что и даст 0 в элементе
 Для этого вычтем из каждой нижележащей строки c индексом результат умножения элемента c текущей строкой. Напомним, что в результате шага 2 первый элемент 1, поэтому первым элементом вычитаемой строки будет являться значение первого элемента строки , что и даст 0 в элементе
Для этого вычтем из каждой нижележащей строки c индексом результат умножения элемента c текущей строкой. Напомним, что в результате шага 2 первый элемент 1, поэтому первым элементом вычитаемой строки будет являться значение первого элемента строки , что и даст 0 в элементеОбратный ход
Теперь необходимо преобразовать матрицу так, чтобы все элементы n-ого столбца выше стали равны нулю. Для этого прибавляем к n-1 строке соответсвующие элементы n-ой строки, умноженные на . К n-2 строке прибавляем соответсвующие элементы (n-1)-ой строки, умноженные на и т.д. Аналогичные действия необходимо совершить над оставшимися строками.
Приведем реализацию функции inverse, принимающей в качестве аргумента исходную матрицу коэффициентов, и возвращающую матрицу, обратную к исходной. Склеим матрицу коэффициентов с единичной матрицей с помощью функции hstack
m = np.hstack((matrix_origin,
np.matrix(np.diag([1.0 for i in range(matrix_origin. shape[0])]))))
 shape[0])]))))
shape[0])]))))
Прямой ход
# forward trace
for k in range(n):
# 1) Swap k-row with one of the underlying if m[k, k] = 0
swap_row = pick_nonzero_row(m, k)
if swap_row != k:
m[k, :], m[swap_row, :] = m[swap_row, :], np.copy(m[k, :])
# 2) Make diagonal element equals to 1
if m[k, k] != 1:
m[k, :] *= 1 / m[k, k]
# 3) Make all underlying elements in column equal to zero
for row in range(k + 1, n):
m[row, :] -= m[k, :] * m[row, k]
Для проверки первгого условия реализуем вспомогательную функцию pick_non_zero_row, возвращающую индекс первой строки, в которой элемент интересующего нас столбца не равен нулю
def pick_nonzero_row(m, k):
while k < m.shape[0] and not m[k, k]:
k += 1
return k
Обратный ход
# backward trace
for k in range(n - 1, 0, -1):
for row in range(k - 1, -1, -1):
if m[row, k]:
# 1) Make all overlying elements equal to zero in the former identity matrix
m[row, :] -= m[k, :] * m[row, k]
Возвратим преобразованную единичную матрицу, т. е. вторую часть «склееного» массива, воспользовавшись функцией hsplit
е. вторую часть «склееного» массива, воспользовавшись функцией hsplit
return np.hsplit(m, n // 2)[1]
Теория матриц
Теория матриц
ОглавлениеПредисловие автора к первому изданиюПредисловие автора ко второму изданию ЧАСТЬ I. ОСНОВЫ ТЕОРИИ Глава I. Матрицы и действия над ними § 1. Матрицы. Основные обозначения § 2. Сложение и умножение прямоугольных матриц § 3. Квадратные матрицы § 4. Ассоциированные матрицы. Миноры обратной матрицы § 5. Обращение прямоугольных матриц. Псевдообратная матрица Глава II. Алгоритм Гаусса и некоторые его применения § 1. 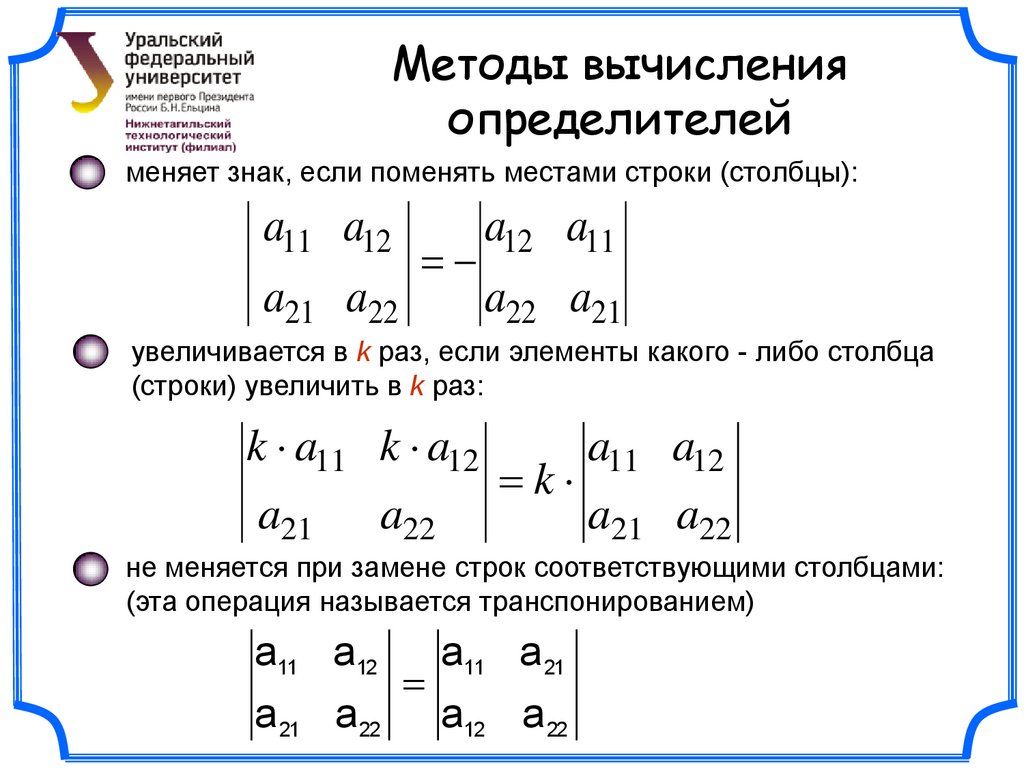 Метод исключения Гаусса Метод исключения Гаусса§ 2. Механическая интерпретация алгоритма Гаусса § 3. Детерминантное тождество Сильвестра § 4. Разложение квадратной матрицы на треугольные множители § 5. Разбиение матрицы на блоки. Техника оперирования с блочными матрицами. Обобщенный алгоритм Гаусса Глава III. Лииейиые операторы в n-мерном векторном пространстве § 1. Векторное пространство § 2. Линейный оператор, отображающий n-мерное пространство в m-мерное § 3. Сложение и умножение линейных операторов § 4. Преобразование координат § 5. Эквивалентные матрицы. Ранг оператора. Неравенства Сильвестра § 6. Линейные операторы, отображающие n-мерное пространство само в себя § 7. Характеристические числа и собственные векторы линейного оператора § 8. Линейные операторы простой структуры Глава IV. Характеристический и минимальный многочлены матрицы § 1. Сложение и умножение матричных многочленов § 2. Правое и левое деление матричных многочленов. Обобщенная теорема Безу § 3.  Характеристический многочлен матрицы. Присоединенная матрица Характеристический многочлен матрицы. Присоединенная матрица§ 4. Метод Д. К. Фаддеева одновременного вычисления коэффициентов характеристического многочлена и присоединенной матрицы Глава V. Функции от матрицы § 1. Определение функции от матрицы § 2. Интерполяционный многочлен Лагранжа–Сильвестра § 3. Другие формы определения f(A). Компоненты матрицы A § 4. Представление функций от матриц рядами § 5. Некоторые свойства функций от матриц § 6. Применение функций от матрицы к интегрированию системы линейных дифференциальных уравнений с постоянными коэффициентами § 7. Устойчивость движения в случае линейной системы Глава VI. Эквивалентные преобразования многочленных матриц. Аналитическая теория элементарных делителей § 1. Элементарные преобразования многочленной матрицы § 2. Канонический вид матрицы § 3. Инвариантные многочлены и элементарные делители многочленной матрицы § 4. Эквивалентность линейных двучленов § 5.  Критерий подобия матриц Критерий подобия матриц§ 6. Нормальные формы матрицы § 7. Элементарные делители матрицы f(A) § 8. Общий метод построения преобразующей матрицы § 9. Второй метод построения преобразующей матрицы Глава VII. Структура линейного оператора в n-мерном пространстве (геометрическая теория элементарных делителей) § 1. Минимальный многочлен вектора, пространства (относительно заданного линейного оператора) § 2. Расщепление на инвариантные подпространства с взаимно простыми минимальными многочленами § 3. Сравнения. Надпространство § 4. Расщепление пространства на циклические инвариантные подпространства § 5. Нормальная форма матрицы § 6. Инвариантные многочлены. Элементарные делители § 7. Нормальная жорданова форма матрицы § 8. Метод акад. А. Н. Крылова преобразования векового уравнения Глава VIII. Матричные уравнения § 1. Уравнение AX=XB § 2. Частный случай: A=B. Перестановочные матрицы § 3. Уравнение AX-XB=C § 4. Скалярное уравнение f(X)=0 § 5. 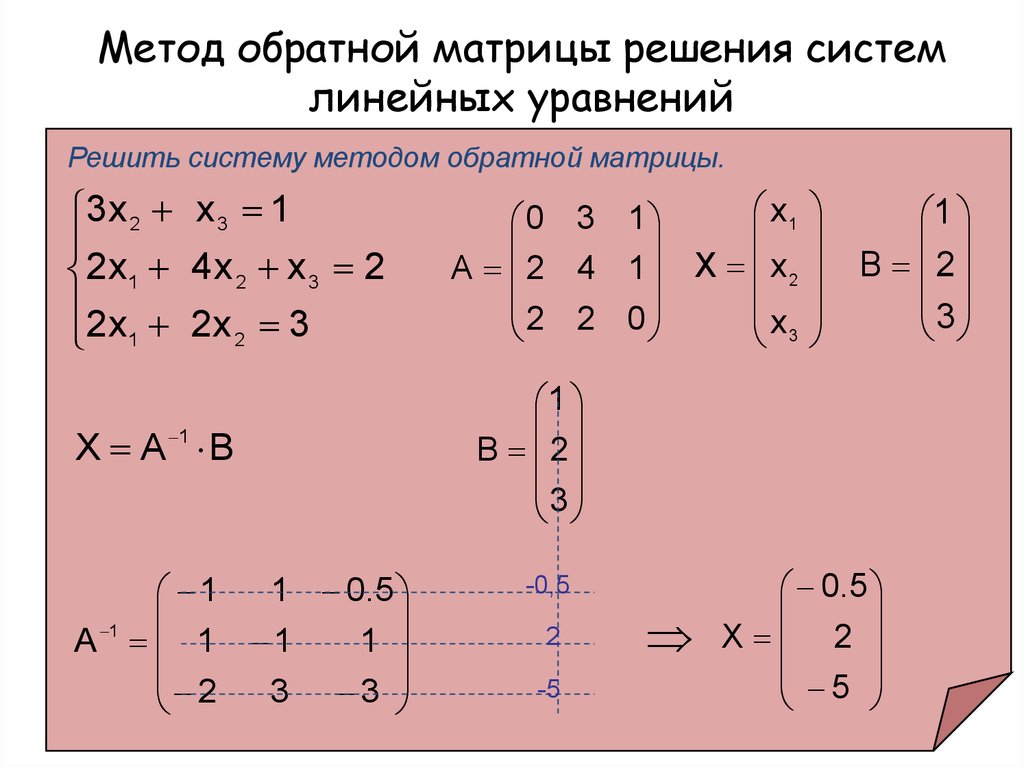 § 6. Извлечение корня m-й степени из неособенной матрицы § 7. Извлечение корня m-й степени из особенной матрицы § 8. Логарифм матрицы Глава IX. Линейные операторы в унитарном пространстве § 1. Общие соображения § 2. Метризация пространства § 3. Критерий Грама линейной зависимости векторов § 4. Ортогональное проектирование § 5. Геометрический смысл определителя Грама и некоторые неравенства § 6. Ортогонализация ряда векторов § 7. Ортонормированный базис § 8. Сопряженный оператор § 9. Нормальные операторы в унитарном пространстве § 10. Спектр нормальных, эрмитовых, унитарных операторов § 11. Неотрицательные и положительно определенные эрмитовы операторы § 12. Полярное разложение линейного оператора в унитарном пространстве. Формулы Кэли § 13. Линейные операторы в евклидовом пространстве § 14. Полярное разложение оператора и формулы Кэли в евклидовом пространстве § 15. Коммутирующие нормальные операторы § 16.  Псевдообратный оператор Псевдообратный операторГлава X. Квадратичные и эрмитовы формы § 1. Преобразование переменных в квадратичной форме § 2. Приведение квадратичной формы к сумме квадратов. Закон инерции § 3. Метод Лагранжа приведения квадратичной формы к сумме квадратов. Формула Якоби § 4. Положительные квадратичные формы § 5. Приведение квадратичной формы к главным осям § 6. Пучок квадратичных форм § 7. Экстремальные свойства характеристических чисел регулярного пучка форм § 8. Малые колебания системы с n степенями свободы § 9. Эрмитовы формы § 10. Ганкелевы формы ЧАСТЬ II. СПЕЦИАЛЬНЫЕ ВОПРОСЫ И ПРИЛОЖЕНИЯ Глава XI. Комплексные симметричные, кососимметрические и ортогональные матрицы § 1. Некоторые формулы для комплексных ортогональных и унитарных матриц § 3. Нормальная форма комплексной симметрической матрицы § 4. Нормальная форма комплексной кососимметрической матрицы § 5. Нормальная форма комплексной ортогональной матрицы ГЛАВА XII.  СИНГУЛЯРНЫЕ ПУЧКИ МАТРИЦ СИНГУЛЯРНЫЕ ПУЧКИ МАТРИЦ§ 1. Введение § 2. Регулярный пучок матриц § 3. Сингулярные пучки. Теорема о приведении § 4. Каноническая форма сингулярного пучка матриц § 5. Минимальные индексы пучка § 6. Сингулярные пучки квадратичных форм § 7. Приложения к дифференциальным уравнениям ГЛАВА XIII. МАТРИЦЫ С НЕОТРИЦАТЕЛЬНЫМИ ЭЛЕМЕНТАМИ § 1. Общие свойства § 2. Спектральные свойства неразложимых неотрицательных матриц § 3. Разложимые матрицы § 4. Нормальная форма разложимой матрицы § 5. Примитивные и импримитивные матрицы § 6. Стохастические матрицы § 7. Предельные вероятности для однородной цепи Маркова с конечным числом состояний § 8. Вполне неотрицательные матрицы § 9. Осцилляционные матрицы Глава XIV. Различные критерии регулярности и локализации собственных значений § 1. Критерий регулярности Адамара и его обобщения § 2. Норма матрицы § 3. Распространение критерия Адамара на блочные матрицы § 4. Критерий регулярности Фидлера § 5.  Круги Гершгорина и другие области локализации Круги Гершгорина и другие области локализацииГлава XV. Приложения теории матриц к исследованию систем линейных дифференциальных уравнений § 1. Системы линейных дифференциальных уравнений с переменными коэффициентами. Общие понятия § 2. Преобразование Ляпунова § 3. Приводимые системы § 4. Каноническая форма приводимой системы. Теорема Еругина § 5. Матрицант § 6. Мультипликативный интеграл. Инфинитезимальное исчисление Вольтерра § 7. Дифференциальные системы в комплексной области. Общие свойства § 8. Мультипликативный интеграл в комплексной области § 9. Изолированная особая точка § 10. Регулярная особая точка § 11. Приводимые аналитические системы § 12. Аналитические функции от многих матриц и их применение к исследованию дифференциальных систем. Работы И. A. Лaппo-Данилевского ГЛАВА XVI. ПРОБЛЕМА РАУСА-ГУРВИЦА И СМЕЖНЫЕ ВОПРОСЫ § 1. Введение § 2. Индексы Коши § 3. Алгоритм Рауса § 4. Особые случаи. Примеры § 5.  Теорема Ляпунова Теорема Ляпунова§ 6. Теорема Рауса-Гурвица § 7. Формула Орландо § 8. Особые случаи в теореме Рауса — Гурвица § 9. Метод квадратичных форм. Определение числа различных вещественных корней многочлена § 10. Бесконечные ганкелевы матрицы конечного ранга § 11. Определение индекса произвольной рациональной дроби через коэффициенты числителя и знаменателя § 12. Второе доказательство теоремы Рауса—Гурвица § 13. Некоторые дополнения к теореме Рауса—Гурвица. Критерий устойчивости Льенара и Шипара § 14. Некоторые свойства многочлена Гурвица. Теорема Стильтьеса. Представление многочленов Гурвица при помощи непрерывных дробей § 15. Область устойчивости. Параметры Маркова § 16. Связь с проблемой моментов § 17. Связь между определителями Гурвица и определителями Маркова § 18. Теоремы Маркова и Чебышева § 19. Обобщенная задача Рауса-Гурвица ДОБАВЛЕНИЕ. НЕРАВЕНСТВА ДЛЯ СОБСТВЕННЫХ И СИНГУЛЯРНЫХ ЧИСЕЛ § 1. Мажорирующие последовательности § 2.  Неравенства Неймана-Хорна Неравенства Неймана-Хорна§ 3. Неравенства Вейля § 4. Максимально-минимальные свойства сумм и произведений собственных чисел эрмитовых операторов § 5. Неравенства для собственных и сингулярных чисел сумм и произведений операторов § 6. Другая постановка задачи о спектре суммы и произведения эрмитовых операторов ЛИТЕРАТУРА |
Я знаю, что нет, но не понимаю почему.
- линейная алгебра
- матрицы
- обратная
$\endgroup$
9
$\begingroup$
Давайте посмотрим на часто забываемые матрицы $1 \times 1$ над $\mathbb{R}$, которые являются другим названием самих действительных чисел. Тогда ваше утверждение преобразуется в утверждение о том, что если $x,y$ — действительные числа, отличные от нуля, то
$$ \frac{1}{x + y} = \frac{1}{x} + \frac{1}{y},$$
что явно неправильно. {-1}$ не существует, и утверждение не имеет смысла. 9{-1},$$
{-1}$ не существует, и утверждение не имеет смысла. 9{-1},$$
возьмем, например,
$$A=\begin{bmatrix}
-\frac{1}{2} & -\frac{\sqrt{3}}{2} \\
\ гидроразрыва {\ sqrt {3}} {2} и — \ гидроразрыва {1} {2}
\end{bmatrix}$$
и B единичная матрица. Можно построить примеры $A_n$ и $B_n$, когда размерность $n$ четная, просто возьмите $A_n$ в качестве диагональной блочной матрицы с $A$ в диагональных элементах и $B_n$ в качестве единичной матрицы. Но нет примеров в нечетных измерениях!
$\endgroup$
$\begingroup$ 9{-1}.$
$\endgroup$
Аддитивная обратная матрица
Mathwords: Аддитивная обратная матрица
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Аддитивная обратная матрица A записывается как –A.
Аддитивная обратная матрица A записывается как –A.