
Дифференциальные уравнения | Открытые видеолекции учебных курсов МГУ
Курс лекций по дифференциальным уравнениям, включающий в себя классические результаты этой теории.
Список всех тем лекций
Лекция 1. Основные понятия.
Значение дифференциальных уравнений
Предметная и математическая постановки задачи
Определение дифференциального уравнения
Определение обыкновенного дифференциального уравнения
Линейное дифференциальное уравнение первого порядка
Линейное однородное уравнение первого порядка
Общее решение однородного дифференциального уравнения
Теорема о единственности представления решения
Корректно поставленная задача по Адамару
Задача Коши
Линейное неоднородное уравнение первого порядка
Общее решение неоднородного дифференциального уравнения
Лекция 2. Теорема о существовании и единственности решения задачи Коши.
Теорема о существовании и единственности решения задачи Коши.
Условие 1: теорема Вейерштрасса
Условие 2: условие Липшица
Локальная формулировка теоремы
Доказательство теоремы
Лекция 3. Подразделы теоремы сравнения и метод дифференциальных неравенств.
Повторение прошлой лекции
Глобальная формулировка теоремы о существовании и единственности решения задачи Коши
Пример применения локальной формулировки теоремы
Расширение множества на котором решение существует и единственно
Теорема Чаплыгина о дифференциальных неравенствах
Определение нижнего решения
Определение верхнего решения
Теорема существования и единственности задачи Коши в формулировке Чаплыгина
Подгоняем условия теоремы под глобальную формулировку задачи Коши
Лекция 4. Теорема существования и единственности для нормальной системы обыкновенных дифференциальных уравнений.
Теорема существования и единственности для нормальной системы обыкновенных дифференциальных уравнений.
уравнений
Понятие нормы вектора
Условия для выполнения теоремы
Локальная формулировка теоремы
Банаховы пространства
Понятие неподвижной точки
Сжимающий оператор
Лекция 5. Линейные однородные дифференциальные уравнения n-ого порядка.
Линейное дифференциальное уравнение n-ого порядка
Дополнительные условия для выделения единственного решения
Краткая запись уравнения
Теорема о принципе суперпозиции
Следствия
Линейно зависимые и независимые функции
Определитель Вронского
Теорема об определителе Вронского для линейно зависимых функций
Теорема об определителе Вронского для линейно независимых функций
Следствие
Теорема о существовании фундаментальной системы решений
Лекция 6.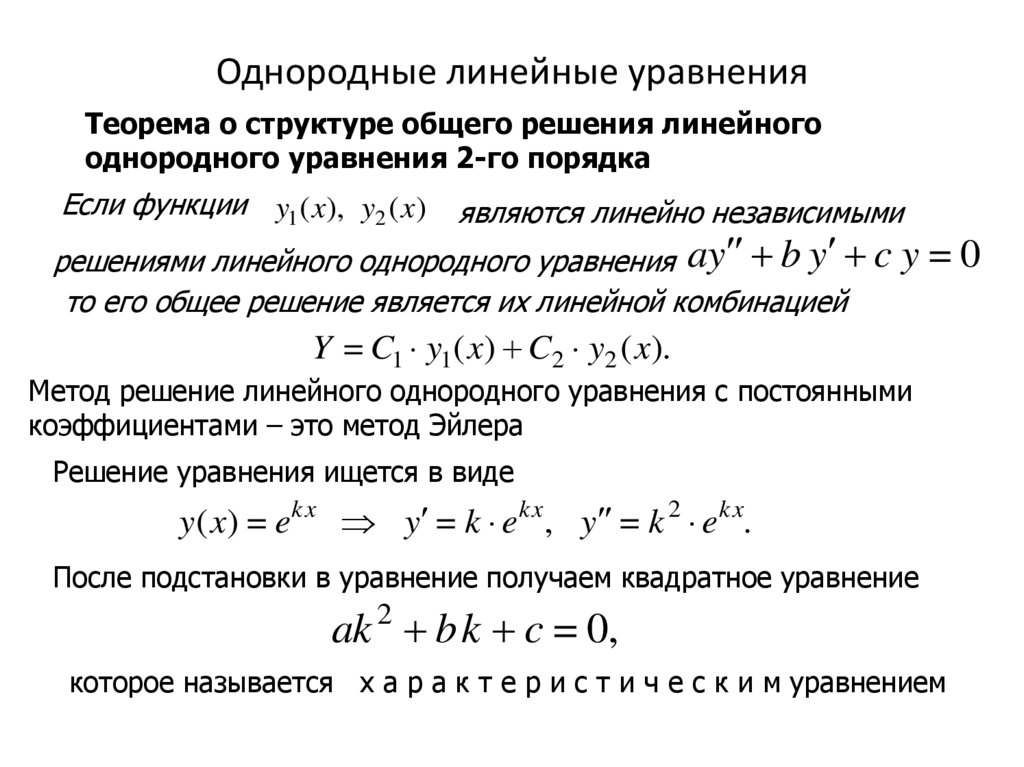 Линейные неоднородные дифференциальные уравнения n-ого порядка.
Линейные неоднородные дифференциальные уравнения n-ого порядка.
Повторение предыдущей лекции
Теорема об общем решении неоднородного дифференциального уравнения
Поиск решения с помощью функции Коши
условиями
Функция Коши
Теорема (вид решения неоднородной задачи Коши с однородными граничными условиями)
Линейные уравнения n-ого порядка с постоянными коэффициентами
Метод Эйлера
Лекция 7. Системы линейных дифференциальных уравнений.
Линейные системы дифференциальных уравнений
Однородная система
Теорема
Теорема
Понятия линейной зависимости и независимости решений
Теорема (об определителе Вронского системы линейно независимых решений системы)
Теорема (о решениях однородной системы)
Теорема (о произвольном решении однородной системы)
Как найти линейно независимые решения системы
Теорема (о произвольном решении неоднородной системы)
Лекция 8.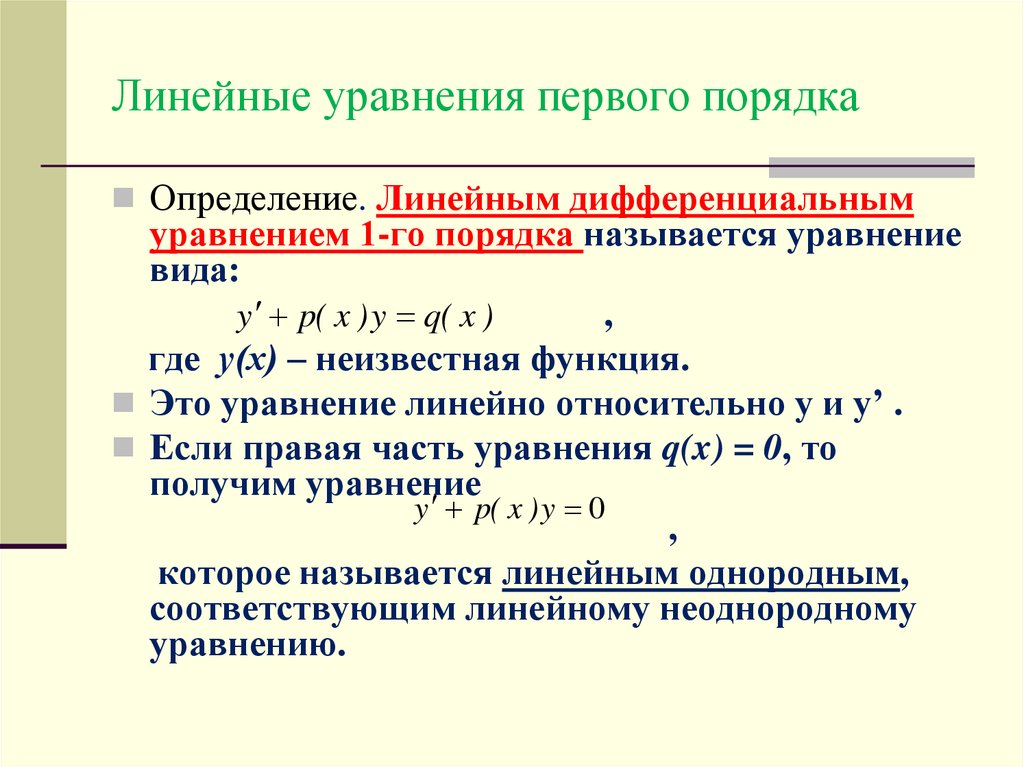 Краевые задачи.
Краевые задачи.
Однородная краевая задача и неоднородная краевая задача
Тождества Лагранжа
Теорема (об однородной краевой задаче)
Теорема (единственность решения)
Лекция 9. Функция Грина.
Краевые задачи (повторение материала предыдущей лекции)
Функция Грина краевой задачи (определение)
Теорема (о существовании функции Грина)
Алгоритм построения функции Грина
Теорема
Теорема (о единственности функции Грина)
Анонс следующей лекции
Лекция 10. Основы теории устойчивости.
Основные определения и постановка задачи
Устойчивость тривиального решения однородной системы дифференциальных линейных уравнений
Лемма 1
Лемма 2
Лемма 3
Анонс следующей лекции
Лекция 11. Основы теории устойчивости (продолжение).
Основы теории устойчивости (продолжение).
Повторение
Классификация точек покоя
Задача (оценка решения)
Пример
Лекция 12. Основы решения уравнений в частных производных.
Пример
(первый интеграл)
(первый интеграл)
Задача Коши (для двумерного случая)
Обобщение на многомерный случай
Резюме лекции
Лекция 13. Приближенные методы решения ОДУ и их систем. Численные методы решения.
Задача Коши для ОДУ 1-го порядка
Задача (о моделировании движения тела, брошенного под углом к горизонту в поле тяжести, с учётом сопротивления воздуха)
Реализация схемы на практике
Анонс следующей лекции
Лекция 14.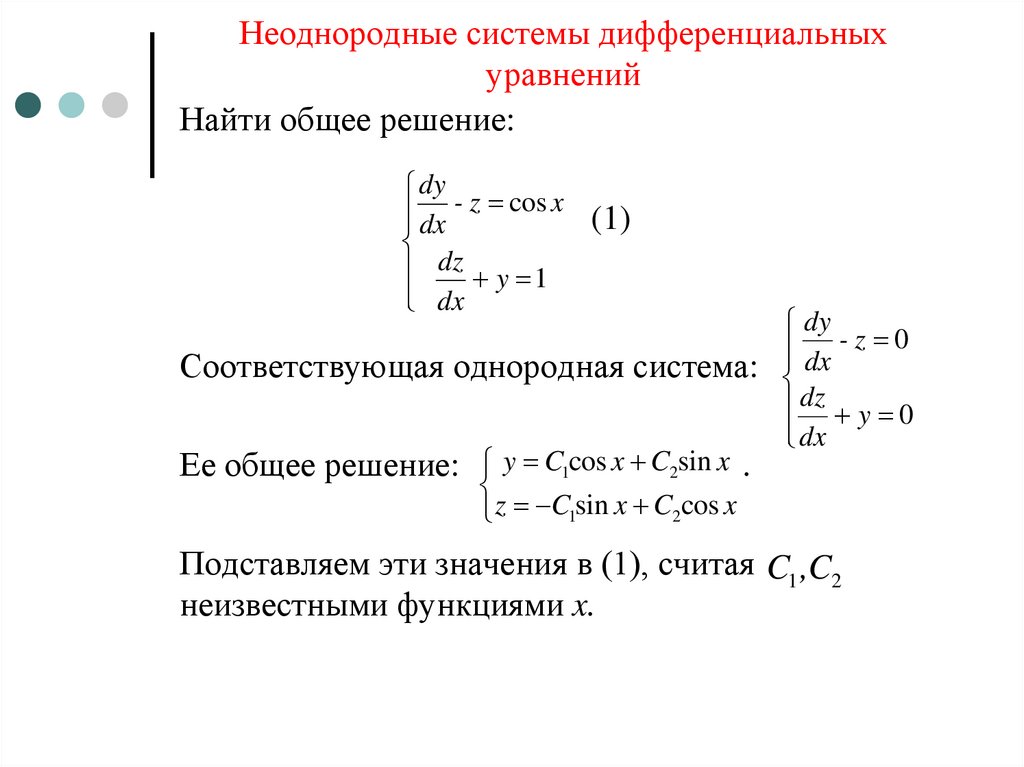 Семейство схем Рунге-Кутты.
Семейство схем Рунге-Кутты.
Метод решения задачи Коши (повторение материала предыдущей лекции)
Одностадийная схема Рунге-Кутты
Двухстадийная схема Рунге-Кутты
Связь количества стадий с порядком точности
Процедура автономизации
Пример
Лекция 15. Жёсткие системы ОДУ и особенности их решения.
Пример (постановка задачи)
Первый подход к решению жестких систем
Общий случай
Второй подход к решению жестких систем
Семейство одностадийных схем Розенброка-Ваннера
Лекция 16. Дифференциально-алгебраические системы.
Постановка задачи
Схема Розенброка-Ваннера
Задача (о движении маятника)
Лекция 17.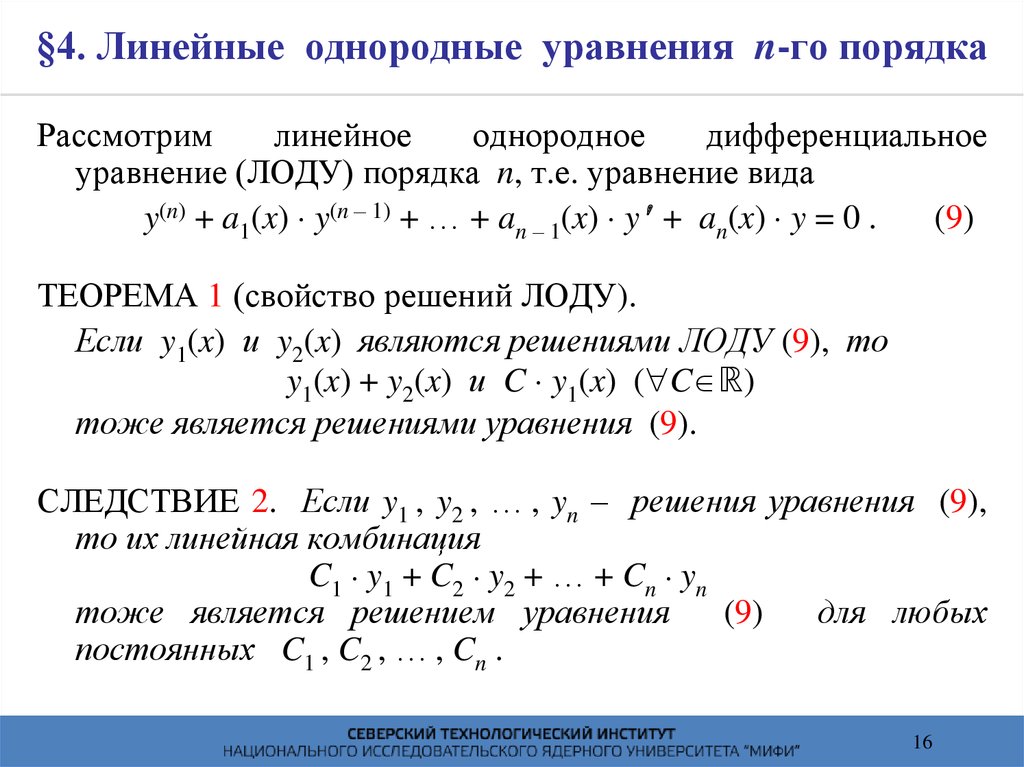 Численная диагностика существования решения задачи Коши.
Численная диагностика существования решения задачи Коши.
16. Линейные дифференциальные уравнения первого порядка. Однородные дифференциальное уравнение. Дифференциальное уравнение Бернулли.
Функция называется однородной функцией первого порядка если при умножении каждого его аргумента на произвольный множитель λ вся функция умножается на .
Пример:
Дифференциальное уравнения y’=F(xy) называется однородным, если функция однородная или F(xy) нулевого порядка.
Дифференциальное уравнение часто задаётся дифференциальной формуле F(x,y)dx+Q(x,y)dy=0 —
данное уравнение будет однородным если p от xy и Q от xy однородные функции одинарного порядка.
Однородные дифференциальное уравнения преобразуется к уравнениям с разделяющей переменным путем замены :
Дифференциальное
уравнение первого порядка называется
линейным если его можно записать в виде:
y’+pxy=qx.
В левой части сгруппируем 2 слагаемых так , чтобы можно было вынести за скобки u или v.
В силу выбора одной из функций произвольно приравнивается выражение в скобках к нулю найдём V:
Алгоритм решения ДУ методом Бернулли
Привести уравнение к виду: y’+p(x;y)=q(x).
Произвести замену y=uv, y’=u’v+v’u.
Сгруппировать слагаемые так, чтобы одну из функций u или v можно вынести за скобку.
Прировнять ворожение в скобках к нулю, найти одну из функций.
Подставить найденную функцию в уравнение найти др.

Записать ответ виде y=uv.
Уравнение вида называется уравнением Бернулли.
17. Дифференциальные уравнения высших порядков. Дифференциальные уравнения, допускающее понижение порядка. Линейное однородное дифференциальное уравнение высшего порядка с постоянными коэффициентами.
Уравнение вида у=f(x;y), не содержащее явным образом у решается методом понижения порядка с помощью замены у=р .
у=f(y;y)- не содержащая явным образом независимая переменная х приводится ДУ первого порядка заменой у=р.
Уравнение вида y’’F(y,y’) не содержит явным образом независимой переменной х приводится к ДУ 1 порядка. Заменим y’=p. Так как переменная является функция от х то х можно рассматривать как обратную функцию от у. Поэтому Р будет функцией переменной у. По правилу ДУ сложной функции получим y’=p p-функция от y.
18. Система n-линейных дифференциальных уравнений первого порядка, решение, сведение к линейному ду n-го порядка.
Для решения многих задач в математике, физике, электротехнике определить состав системы. В которой протекает несколько последовательных химических реакций первого порядка, отыскание векторных линий поля и других не редко требует несколько функций. Нахождение этих функций приводит к системе ДУ.
Система ДУ называется множество ДУ каждый из которых содержит независимую переменную искомую х и несколько переменных
Система ДУ первого порядка разрешенная относительно в производной называется нормальной системой ДУ
Решением системы (1) называется множество функций у1,у2,….уn удовлетворяющих каждый у уравнений. Задача нахождения частного решения системы (1) называется задачей Коши. Частное решение нахождения использованием начальных условий. Метод решения системы ДУ:
Метод исключения. Одним из основных методом интегрирования системы ДУ является метод сведения системы к одному ДУ высшего порядка
Продифференцируем
1 уравнение по Х.
Поставим z’ во второе уравнение: 4y’-y’’=6y-9z
Из 1 уравнения выразим z:
19. Понятие числового ряда, частичной суммы ряда, суммы ряда. Необходимое условие сходимости ряда. Признак сходимости знакоположительности числовых рядов: признак сравнения Даламбера, признак Коши, интегральный критерий.
Числовым рядом называется сумма вида:
Где — это энный член ряда который образует бесконечную последовательность.
Частичной суммой ряда называется сумма n-первых членов ряда.
Если при бесконечном возрастании номер n части суммы ряда S стремится к пределу S.
, то ряд называется сходящимся, а число S называется суммой ряда. Если же этот предел не существует то ряд называется расходящимся.
Необходимые признаки сходимости ряда
Ряд
может сходится только
при условии что его общий член U
при неограниченном увеличении номера
n стремится к 0.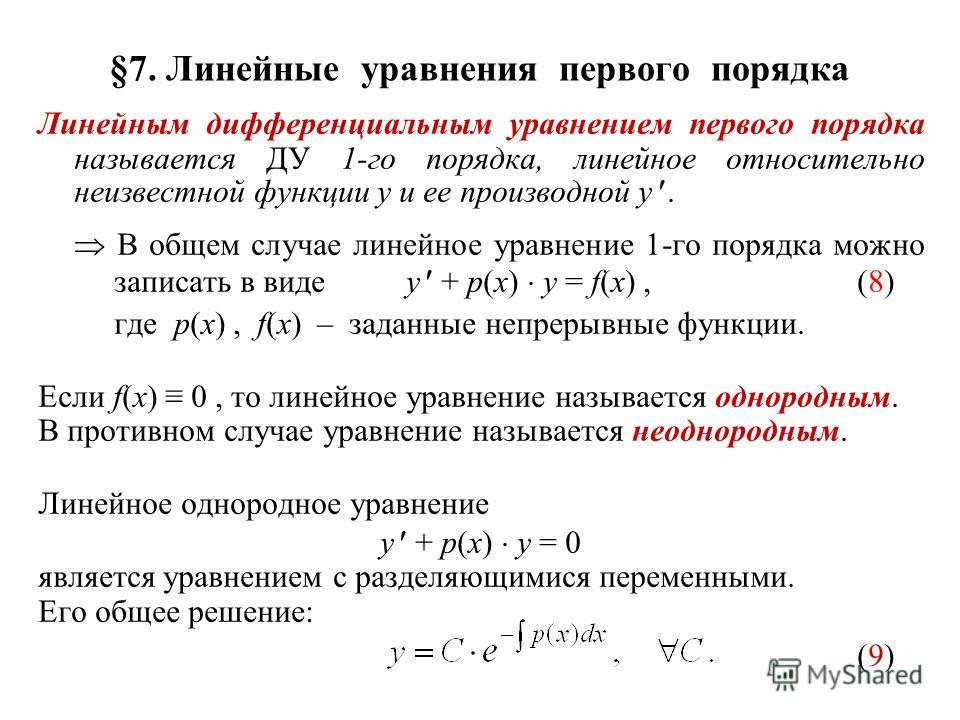
Необходимым признаком является достаточным для расходимости ряда.
Числовые ряды используются для доказательства сходимости и расходимости рядов.
Ряд геометрический:
Если |q|<1 то ряд сходится
Если |q|>1 то ряд расходится.
Гармонический: ряд расходится.
Обобщённо гармонический ряд:
Если p=1 то расходится
Если р<0 то расходится
Если p>1 то сходится
Достаточные признаком сходимости знакоположительного ряда.
Признак сравнения
Исследуемый ряд сходится, если его члены не превосходят соответствующих членов другого заведомо сходящегося ряда исследуемый ряд расходится, если его члены превосходят соответствующие члены другого заведомо расходящегося ряда. (Из сходимости большего ряда следует сходимость меньшего ряда, а из расходимости меньшего ряда следует расходимость большего:
Признак Даламбера:
Если
для ряда с положительными членами сумма
выполняет условие что предел
отношения последующего члена ряда к
предыдущему =L, то ряд
сходится при L=1 и расходится
при L>1.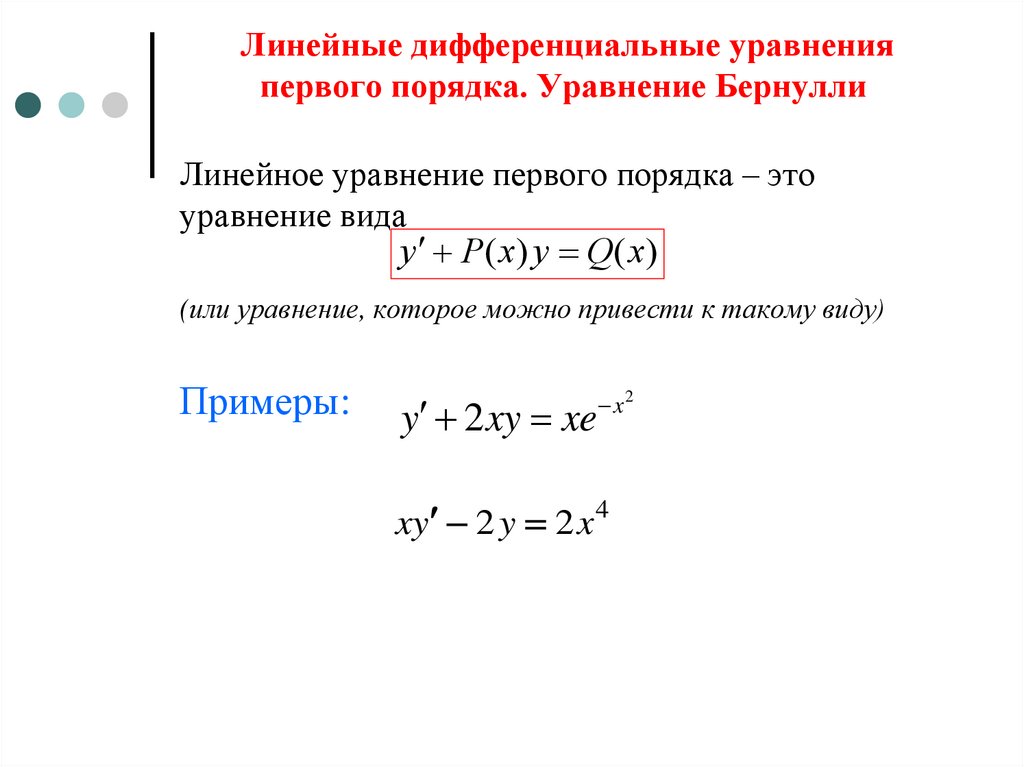 При L=1
признак Даламбера ответа на вопрос не
даёт.
При L=1
признак Даламбера ответа на вопрос не
даёт.
Линейное дифференциальное уравнение – формула, вывод, примеры
Линейное дифференциальное уравнение – это уравнение, имеющее переменную, производную от этой переменной и несколько других функций. Стандартная форма линейного дифференциального уравнения — dy/dx + Py = Q, и оно содержит переменную y и ее производные. P и Q в этом дифференциальном уравнении являются либо числовыми константами, либо функциями x.
Линейное дифференциальное уравнение в важной форме дифференциального уравнения, которое можно решить с помощью формулы. Давайте узнаем формулу и вывод, чтобы найти общее решение линейного дифференциального уравнения.
| 1. | Что такое линейное дифференциальное уравнение? |
| 2. | Вывод решения линейного дифференциального уравнения |
| 3. | Формула общего решения линейного дифференциального уравнения |
4. | шагов для решения линейного дифференциального уравнения |
| 5. | Примеры линейного дифференциального уравнения |
| 6. | Практические вопросы |
| 7. | Часто задаваемые вопросы о линейных дифференциальных уравнениях |
Что такое линейное дифференциальное уравнение?
Линейное дифференциальное уравнение имеет вид dy/dx + Py = Q, где P и Q — числовые константы или функции относительно x. Он состоит из y и производной от y. Дифференциал представляет собой дифференцирование первого порядка и называется линейным дифференциальным уравнением первого порядка.
Это линейное дифференциальное уравнение находится в y. Точно так же мы можем написать линейное дифференциальное уравнение и относительно x. Линейное дифференциальное уравнение относительно x: dx/dy + \(P_1\)x = \(Q_1\).
Некоторые примеры линейного дифференциального уравнения относительно y: dy/dx + y = Cosx, dy/dx + (-2y)/x = x 2 . e -x . А примерами линейного дифференциального уравнения относительно x являются dx/dy + x = Siny, dx/dy + x/y = ey. dx/dy + x/(ylogy) = 1/y.
e -x . А примерами линейного дифференциального уравнения относительно x являются dx/dy + x = Siny, dx/dy + x/y = ey. dx/dy + x/(ylogy) = 1/y.
Вывод решения линейного дифференциального уравнения
Вывод общего решения линейного дифференциального уравнения можно понять с помощью следующей последовательности шагов. Дифференциальное уравнение первого порядка имеет вид.
dy/dx +Px = Q
Здесь мы умножаем обе части уравнения на функцию x, скажем, g(x) . Далее эта функция выбирается так, чтобы правая часть уравнения была производной от y.g(x). d/dx(y.g(x)) = y.g(x).
g(x).dy/dx + P.g(x).y = Q.g(x)
Выберите g(x) таким образом, чтобы правая часть стала производной от y.g(x).
g(x).dy/dx + P.g(x)y = d/dx(y.g(x)]
Правая часть приведенного выше выражения получена с использованием формулы производной для произведения функций
g(x).dy/dx + P.g(x).y = g(x).dy/dx + y.g'(x)
P.g(x) = g'(x)
P = g’ (x)/g(x)
Интегрируя обе части по x, получаем
\(\int P. {\int P.dx}\).
{\int P.dx}\).
Использование описанных выше шагов можно лучше понять с помощью приведенных ниже примеров решения линейного дифференциального уравнения.
Похожие темы
- Исчисление
- Формулы интегрирования
- Формулы дифференцирования и интегрирования
- Цепное правило Формула
- Дифференциальные уравнения
Часто задаваемые вопросы о линейном дифференциальном уравнении
Что такое линейное дифференциальное уравнение?
Линейное дифференциальное уравнение — это уравнение, имеющее переменную, производную от этой переменной и несколько других функций. Стандартная форма линейного дифференциального уравнения — dy/dx + Py = Q, и оно содержит переменную y и ее производные. P и Q в этом дифференциальном уравнении являются либо числовыми константами, либо функциями x.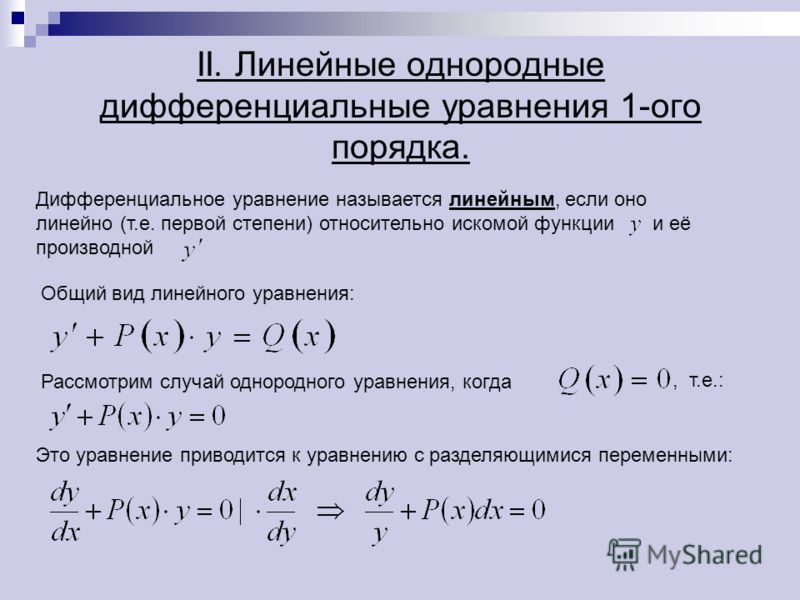
Как узнать, является ли дифференциальное уравнение линейным дифференциальным уравнением?
Дифференциальное уравнение называется линейным дифференциальным уравнением, если оно имеет переменную и первую производную. Линейное дифференциальное уравнение относительно у имеет вид dy/dx + Py = Q. Здесь у нас есть переменная у, первая производная от переменной у, и у нас есть Р, Q, которые являются функциями от х. От имени линейных эти дифференциальные уравнения имеют только производные первой степени.
9{\int P.dx}\). Наконец, решение линейного дифференциального уравнения имеет вид \(y(I.F) = \int(Q × I.F).dx + C\)Какова стандартная форма линейного дифференциального уравнения относительно x?
Стандартная форма линейного дифференциального уравнения относительно x: dx/dy + Px = Q. Это дифференциальное уравнение, имеющее переменную x, первую производную x и P, Q представляют функции относительно y. Линейное дифференциальное уравнение относительно x имеет производную первого порядка от x.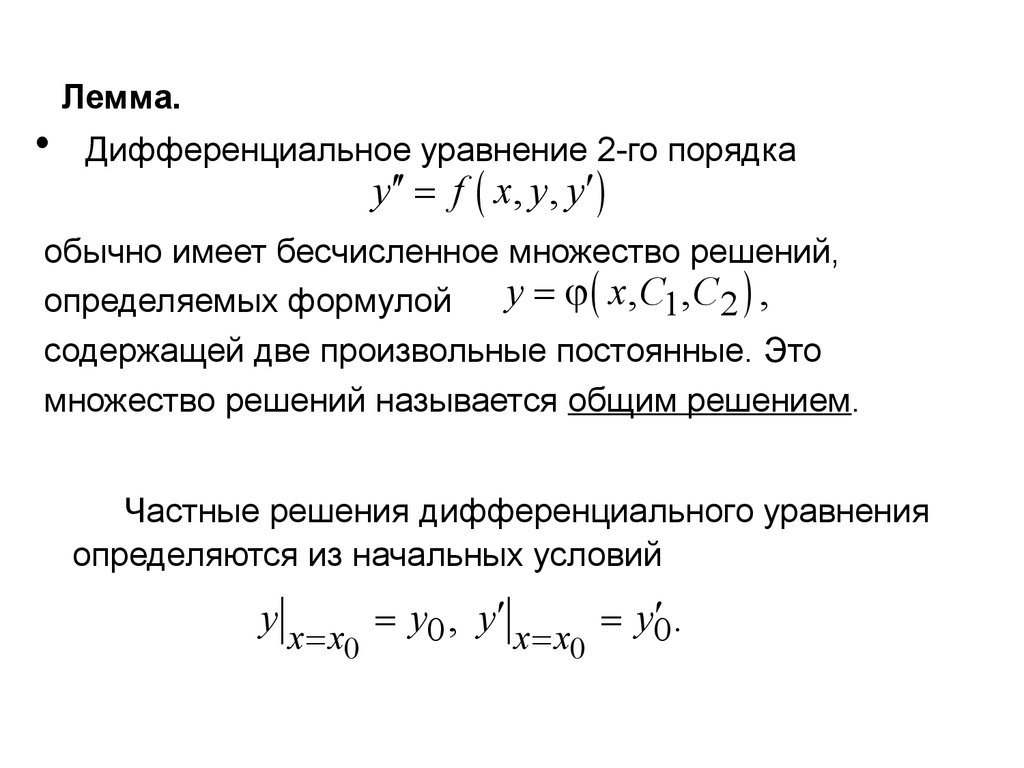
Какая формула общего решения линейного дифференциального уравнения 93x(t)=\cos t. \end{собрать*} Хотя это ОДУ нелинейно по независимой переменной $t$, оно все же считается линейным ОДУ, поскольку нас интересует только зависимость уравнения от $x$ и его производной. Как вы увидите, мы легко справляемся с нелинейностями в $t$. Такие нелинейности могут приводить к интегралам, которые невозможно вычислить аналитически, но мы будем считать дифференциальное уравнение «решенным», если мы можем записать $x(t)$ как выражение, содержащее только интегралы от функций $t$.
92. \label{ode1}\тег{1} \конец{собрать} Добавление этого маленького члена могло бы показаться безобидным, но оно разрушило идеальную ситуацию, которая была у нас с предыдущим уравнением. Правая часть по-прежнему является функцией только $t$, но левая часть больше не является производной с относительно $t$. Мы не можем просто интегрировать левую часть, так как мы не уметь считать \начать{собирать*} \int \left(\diff{x}{t} + x(t)\right)dt. \end{собрать*}
\end{собрать*}Если бы мы могли каким-то образом вернуть левую часть в производную выражения относительно $t$ (при сохранении правой части функцией только $t$), мы могли бы восстановить идеальную ситуацию более раннее уравнение и мог решить ОДУ, интегрируя по $t$.
Весь фокус в том, чтобы найти способ превратить $\diff{x}{t} + x(t)$ в
производная от некоторого выражения. Член $x(t)$ просто не является производной
любой алгебраической функции от $x(t)$. Тем не менее, правило произведения полезно.
инструмент в этой ситуации, так как в производной продукта,
каждый фактор остается нетронутым в одном из терминов. Если мы умножим $x(t)$
на некоторый множитель $\mu(t)$ и продифференцируем, получим
\начать{выравнивать*}
\ diff {}{ t} (\ mu (t) x (t)) = \ mu (t) \ diff {x} {t} + \ diff {\ mu} {t} x (t).
\конец{выравнивание*}
Это выглядит ближе к тому, что нам нужно. В самом деле, если мы умножим
обе стороны от ОДУ \eqref{ode1} на $\mu(t)$, ОДУ становится
\начать{собирать}
\mu(t)\diff{x}{t} + \mu(t)x(t)=\mu(t)t^2. \label{multmu1}\тег{2}
\конец{собрать}
\label{multmu1}\тег{2}
\конец{собрать}
Мы так близки к тому, чтобы превратить левую часть в производную произведения. Если только коэффициент при $x(t)$ был $\diff{\mu}{t}$, а не $\mu(t)$! Тогда левая часть уравнения \eqref{multmu1} действительно будет производной от $\mu(t)x(t)$, и мы могли бы решить ОДУ интегрированием.
К счастью, мы вольны выбирать любой $\mu(t)$, какой захотим. Почему бы нет выбрать $\mu(t)$, чтобы все работало идеально? Мы могли бы позволить $\mu(t)$ — функция, позволяющая заменить $\mu(t)$ на $\diff{\mu}{t}$. Другими словами, мы могли бы позволить $\mu(t)$ быть решением ОДУ \начать{собирать} \diff{\mu}{t} = \mu(t). \метка{odemu1}\тег{3} \конец{собрать} 92. \end{собрать*}
Сразу видно, что нам не нужна константа интегрирования $C_1$, так как мы можем исключить ее из обеих частей уравнения.
Причина, по которой $C_1$ не имеет значения, заключается в том, что нам просто нужен любой множитель $\mu(t)$
которое удовлетворяет уравнению \eqref{odemu1}, чтобы сделать левую руку
часть уравнения \eqref{multmu1} — производная от $\mu(t)x(t)$.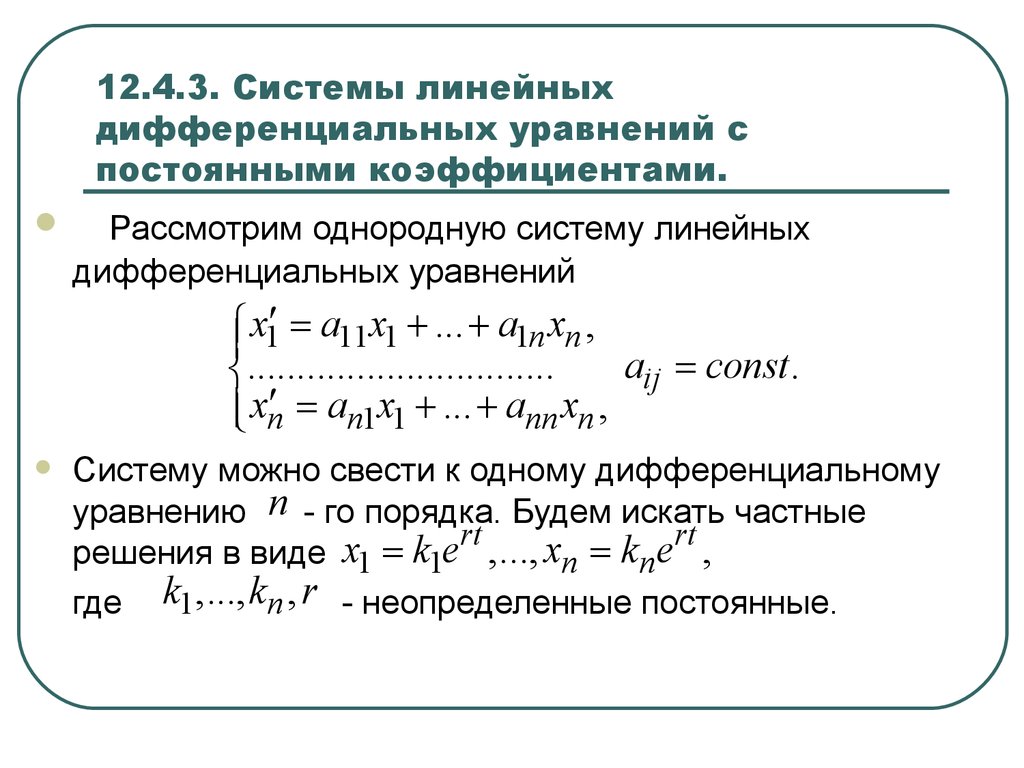 t.$$ 92.
\конец{выравнивание*}
Решение удовлетворяет уравнению \eqref{ode1}.
t.$$ 92.
\конец{выравнивание*}
Решение удовлетворяет уравнению \eqref{ode1}.
Поскольку умножение ОДУ на множитель $\mu(t)$ позволило проинтегрировать уравнения, мы ссылаемся на $\mu(t)$ как на интегрирующий множитель .
Общее линейное ОДУ первого порядка
Мы можем использовать интегрирующий множитель $\mu(t)$ для решения любого первого порядка линейная ОДУ. Напомним, что такое ОДУ линейно по функции и его первая производная. Общая форма линейного ОДУ первого порядка в $x(t)$ такова: \начать{собирать} \diff{x}{t} + p(t)x(t)=q(t). \label{фолин}\тег{6} \конец{собрать} (Если ОДУ имеет функцию $t$, умножающую $\diff{x}{t}$, вы можете разделить на функцию, чтобы представить ее в таком виде, предполагая, что функция никогда не равен нулю.)
Повторим описанную выше процедуру, чтобы превратить левую часть уравнения \eqref{folin} в производную от $t$.
Умножая на интегрирующий множитель $\mu(t)$, ОДУ принимает вид
\начать{собирать}
\mu(t)\diff{x}{t} + \mu(t)p(t)x(t)=\mu(t)q(t). \label{folin_multmu}\tag{7}
\конец{собрать}
Левая часть уравнения \eqref{folin_multmu} будет производной от $\mu(t)x(t)$
$$\diff{}{t}(\mu(t)x(t)) = \mu(t)\diff{x}{t} + \diff{\mu}{t}x(t)$$
если бы мы могли обменять $\diff{\mu}{t}$ на $\mu(t)p(t)$.
Единственным отличием от первого примера является наличие функции
$р(т)$.
\label{folin_multmu}\tag{7}
\конец{собрать}
Левая часть уравнения \eqref{folin_multmu} будет производной от $\mu(t)x(t)$
$$\diff{}{t}(\mu(t)x(t)) = \mu(t)\diff{x}{t} + \diff{\mu}{t}x(t)$$
если бы мы могли обменять $\diff{\mu}{t}$ на $\mu(t)p(t)$.
Единственным отличием от первого примера является наличие функции
$р(т)$.
Интегрирующий множитель $\mu(t)$ должен удовлетворять уравнению \начать{собирать} \diff{\mu}{t} = p(t)\mu(t). \label{folin_odemu}\tag{8} \конец{собрать} Это уравнение похоже на уравнение (3) из введения ОДУ, за исключением того, что у нас есть изменяющийся во времени коэффициент $p(t)$. Аналогично можно решить следующим образом.
Если разделить уравнение \eqref{folin_odemu} на $\mu(t)$, левая часть
становится $\displaystyle\frac{1}{\mu(t)}\diff{\mu}{t} = \diff{}{t} \log |\mu(t)|$.
Мы можем преобразовать уравнение \eqref{folin_odemu} в
\начать{собирать*}
\diff{}{t} \log |\mu(t)| = р(т),
\end{собрать*}
которое легко решается интегрированием
\начать{выравнивать*}
\int \diff{}{t} \log |\mu(t)| dt&= \int p(t)dt\\
\лог |\му(т)| &= \int p(t)dt + C_2.