
Бесекерский В.А. Сборник задач по теории автоматического регулирования и управления. Решебник по ТАУ.
Сборник задач по теории автоматического регулирования и управления, под редакцией В. А. Бесекерского
Сборник рассчитан на студентов, специализирующихся в области теории автоматического регулирования и следящих систем, а также студентов других специальностей, изучающих теорию автоматического регулирования и управления. Сборник, ориентируется на ряд используемых в вузах книг. В качестве основной принята книга В.А. Бесекерского и Е.П. Попова “Теория систем автоматического регулирования”. Построение сборника, содержание, терминология и методика изложения в основном соответствует этой книге.
Список решенных задач из данного задачника вы можете посмотреть ниже:
Если нужных вам задач нет в списке решенных напишите нам и мы в кратчайшие сроки выложим их на сайт.
РАЗДЕЛ I.
ЛИНЕЙНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
ГЛАВА 1.
Дифференциальные уравнения и передаточные функции звеньев и автоматических систем
§ 1.1. Дифференциальные уравнения и передаточные функции звеньев
§ 1.2. Типовые динамические звенья
§ 1.3. Дифференциальные уравнения и передаточные функции автоматических систем
§ 1.4. Структурные схемы и их преобразование
ГЛАВА 2.
Частотные характеристики динамических звеньев и систем автоматического регулирования
§ 2.1. Характеристики динамических звеньев
§ 2.2. Амплитудно-фазовые характеристики разомкнутых систем автоматического регулирования
§ 2.3. Вещественные частотные характеристики замкнутых систем автоматического регулирования
§ 2.4. Логарифмические характеристики систем автоматического регулирования
ГЛАВА 3.
Устойчивость линейных систем
§ 3.1. Алгебраические критерии устойчивости
§ 3.2. Критерий устойчивости Михайлова
§ 3.3. Критерий устойчивости Найквиста
§ 3.4. Определение устойчивости по логарифмическим частотным характеристикам разомкнутой системы
§ 3.5. Построение областей устойчивости
ГЛАВА 4.
Построение переходных процессов в системах автоматического регулирования
§ 4.1. Классический метод решения дифференциальных уравнений
§ 4.2. Применение изображений Лапласа и Карсона – Хевисайда
§ 4.3. Приближенные методы расчета переходных процессов
ГЛАВА 5.
Оценка качества регулирования
§ 5.1. Определение точности при наличии задающего воздействия
§ 5.2. Определение точности при наличии возмущающего воздействия
| Задача 227 | Задача 228 | Задача 229 | Задача 230 | Задача 231 | Задача 232 |
§ 5.3. Корневые методы оценки динамических свойств
§ 5.4. Оценка по кривой переходного процесса
§ 5.5. Интегральные оценки
| Задача 248 | Задача 249 | Задача 250 |
§ 5.6. Частотные оценки динамических свойств
ГЛАВА 6.
Синтез линейных систем
§ 6.1. Выбор параметров САР по требуемой точности
| Задача 260 | |||||||||
| Задача 261 | Задача 262 | Задача 263 | Задача 264 | Задача 265 | Задача 266 | Задача 267 | Задача 268 | Задача 269 | |
§ 6.2. Алгебраические методы выбора параметров САР
§ 6.3. Частотные методы выбора параметров САР. Расчёт последовательных корректирующих устройств
§ 6.4. Расчёт дополнительных обратных связей и прямых параллельных корректирующих связей
| Задача 280 | Задача 281 | Задача 282 | Задача 283 | Задача 284 | Задача 285 |
§ 6.5. Расчёт систем комбинированного управления
| Задача 286 | Задача 287 | Задача 288 |
§ 6.6. Расчёт последовательных корректирующих контуров, работающих на несущей частоте
Если нужных вам задач нет в списке решенных напишите нам и мы в кратчайшие сроки выложим их на сайт.
Сергей Пост Июль 27th, 2015
Posted In: Платные работы, Сборник задач по теории автоматического регулирования и управления под редакцией В.А.Бесекерского, ТАУ
Решения задач зкз ТАУ
14
Задача 1.Линеаризовать уравнение характеристики элемента умножения y=x1x2в точке y0=x01x02.Р е ш е н и е. В соответствии с малыми приращениями y0+ Δy=(x01+x1)(x02+x2)= x01x02+x01Δx2+x02Δx1+Δx1Δx2= =y0+x01Δx2+x02Δx1+ Δx1Δx2=y0+x01Δx2+x02Δx1, пренебрегая малыми высшего порядка. Тогда вычитая значение y0из левой и правой частей, получим y= x
01Δx2+x02Δx1= k1Δx1+k2Δx2, где k1= x02; k2=x01, т.е. элемент умножения может быть приближенно представлен в виде сумматора и двух усилителей (линейных звеньев).Задача 2. Написать уравнения состояния и построить электронную модель системы, имеющей матрицы состояния:;C=.Р е ш е н и е. В соответствии с матрицами А,В и С уравнения состояния запишем в виде:Тогда электронная модель с использованием идеальных интеграторов и усилителей будет иметь вид:
Задача 3. Начертить блок-схему и написать уравнения состояния системы, описываемой дифференциальным уравнением, где g — входная величина; y — выходная величина.Р е ш е н и е. Разрешим уравнение относительно старшей производнойи составим блок- схему ее получения рис.1
Рис.1 Блок-схема системы
В соответствии с выбранными переменными состояния на рис.2.8 запишем уравнения в нормальной форме
или в матричной форме где:
Задача 4. построить л.а.х. и л.ф.х. системы, описываемой передаточной функцией W(p)=100/(0.1p+1)(0.01p+1).Р е ш е н и е. Представим передаточную функцию в виде произведения элементарных звеньевНизкочастотный участок л.а.х. пойдет с наклоном 0 дБ/дек на уровне 20 lg 100= 40 дБ. Частоты сопряжения для апериодических составляющих будут соответственно ω1=1/0.1=10 и ω2=1/0.01=100. Фазочастотная характеристика строится в соответствии с уравнением Φ(ω)= arctg (0.1ω) + arctg (0.01ω). Ниже представлены графики л.а.х. и л.ф.х., соответствующие заданной передаточной функции.
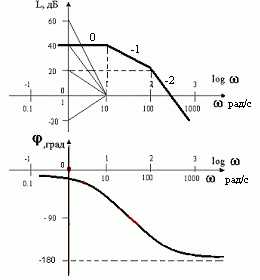
Задача 5. Определить передаточную функцию минимально-фазового устройства, л.а.х. которого представлена ниже
Рис. 1. Логарифмическая амплитудночастотная характеристика устройства
Р е ш е н и е. Двигаясь по л.а.х. в направлении возрастания частоты определяем, что звено принадлежит к дифференцирующему типу, т.к. наклон низкочастотного участка равен +20дБ/дек (+1). Передаточная функция равна W(p)=0.2p. При частоте излома л.а.х. ω=50 наклон меняется на -20дБ/дек (-1). Очевидно добавлены два звена с передаточной функциейТогда суммарная передаточная функция, соответствующая заданной л.а.х. будет иметь вид
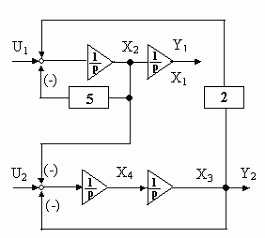
Задача 6. Пользуясь правилами структурных преобразований привести представленную на рис.3.4. структурную схему замкнутой многоконтурной системы к одноконтурной и найти передаточные функции:
Рис.2. Структурная схема многоконтурной САУ
Р е ш е н и е:перед тем, как находить передаточные функции необходимо освободиться от перекрестных связей 1 и 2 на рис.3.4, для чего необходимо перенести или узел, или сумматор с добавлением соответствующих звеньев. Кроме того, целесообразно привести возмущающее воздействие f(t) ко входу САУ. Тогда получим схему на рис.3.5.
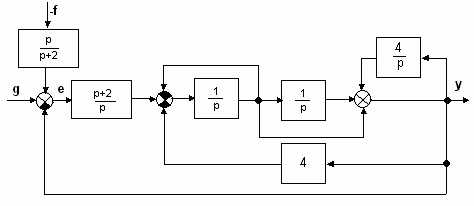 Рис.3.5.
Преобразованная структурная схема без
перекрестных связей
Рис.3.5.
Преобразованная структурная схема без
перекрестных связей
Пользуясь правилами структурных преобразований свернем внутренние контура и получим одноконтурную замкнутую САУ на рис.3.
Рис.3. Одноконтурная структурная схема САУ
Тогда требуемые передаточные функции замкнутой САУ запишем в виде:
Найденные с помощью правил структурных преобразований передаточные функции позволяют достаточно просто определить временные и частотные характеристики, а так же получить качественные и количественные оценки динамики и статики САУ.
Задача 7. Определить критический коэффициент усиления Ккр системы, разомкнутая передаточная функция которой .Р е ш е н и е. Найдем характеристическое уравнение замкнутой системы D(p) = p*(p
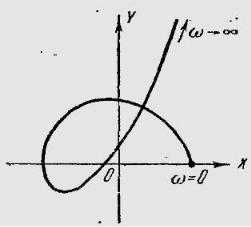
2+ p + 2) + k = p3+ p2+ 2p + k = 0. Для системы третьего порядка граница устойчивости из определителя (минора) определятся правилом: произведение средних членов характеристического уравнения равно произведению крайних при положительном первом члене, т.е. 2*1=1*Ккр. Откуда Ккр=2.Задача 8.Определить количество правых корней m системы третьего порядка, годограф Михайлова которой имеет вид
Р е ш е н и е. Из рисунка видно, что при изменении частоты от 0 до +ω суммарный угол поворота годографа Михайлова равен -. Тогда в соответствии с формулой (4.3). Откуда число положительных корней m = 2.
Задача 9. Определить порядки астатизма по управляющему g(t) и возмущающему f(t) воздействиям САУ, структурная схема которой приведена на рис.5.11.
Рис.5.11. Структурная схема САУ
Р е ш е н и е. Сначала необходимо привести исходную структурную схеме к одноконтурной, как показано на рис.5.12.
Рис.5.12. Приведенная структурная схема
Из рис. 5.12 видно, что при охвате идеального интегратора отрицательной обратной связью получается апериодическое звено 1-го порядка. Поэтому пользуясь правилом определения порядка астатизма, приведенным выше, можно заключить, и по управляющему, и по возмущающему воздействию астатизм равен 1.
Задача 10. Определить предельное значение коэффициента передачи k нелинейного элемента из условия обеспечения абсолютной устойчивости нелинейной системы, передаточная функция линейной части которой
Р е ш е н и е.Амплитудно-фазовая характеристика линейной части
Тогда видоизмененная частотная характеристика
Изменяя частоту от 0 до построим видоизмененную частотную характеристику (рис.7.4).
Рис. 7.4. Видоизмененная частотная характеристика.
Вся характеристика Wлч*(jω) располагается во втором квадранте, поэтому линию (прямую) Попова предельную (наиболее близко подходящую к началу координат) можно провести через начало координат. В этом случае будет выполнятся условие, что вся видоизмененная а.ф.х. W*(jω) будет находится справа от прямой Попова. И предельный коэффициент нелинейного элемента К=находится из условия (1/К)=0, т.е. нелинейность для обеспечения абсолютной устойчивости может располагаться в угле arctg K=90°.
Задача 11.Определить возможную частоту автоколебаний при введении в САУ, имеющей ЛЧХ вида (рис.1), однозначной нелинейности в виде двухпозиционного реле.
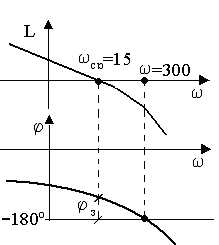 Рис.1.
ЛЧХ линейной части
Рис.1.
ЛЧХ линейной части
Р е ш е н и е. Известно, что характеристика — 1/Wнэ(jω,А) однозначного нелинейного элемента (двухпозиционного реле) полностью располагается на отрицательной действительной полуоси, поэтому а.ф.х. линейной части Wлч(jω) может ее пересечь только при угле -180°. Частота возможных автоколебаний определяется по Wлч(jω), а л.ф.х. (рис.7.8) показывает, что фазовый угол сдвига -180° происходит на частоте ω = 300 рад/с. Это и есть возможная частота автоколебаний при введении в САУ однозначной нелинейности.
Задача 12. Изобразить фазовые траектории для нелинейной системы с тремя различными нелинейностями — двухпозиционное реле, трехпозиционное реле с зоной нечувствительности (±0,2) и двухпозиционное реле с гистерезисом (±0,1), если линейная часть имеет передаточную функцию . Примем для всех нелинейностей величину сигнала на выходе реле ±2.Р е ш е н и е. В соответствии с заданием модель нелинейной системы можно представить в виде рис.7.10.
Рис.7.10. Модель нелинейной САУ
Тогда уравнения состояния (7.9) запишутся в виде
Разделив второе из уравнений на первое, получим уравнение фазовой траектории
В зависимости от того, с какой стороны от линии переключения реле находится изображающая точка, решения дифференциального уравнения будут следующие [2]: справа от линии переключения при x1> 0 x1= 4 ln |x2+ 10| — 0,4x2+ c1; cлева от линии переключения при x1< 0 x1= 4 ln |x2— 10| — 0,4x2+ c2; для трехпозиционного реле движение изображающей точки в пределах зоны нечувствительности -0,2<x1<+0,2 соответствует уравнению x1= — 0,4x2+c3, где с1, с2и с3— постоянные интегрирования, зависящие от начальных условий. На рис. 7.11 изображены фазовые траектории нелинейной САУ с различными нелинейными элементами. Припасовывание или сшивание участков фазовых траекторий происходит по линиям переключений.
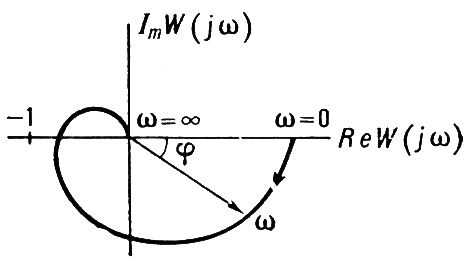
Задача 13. На рис.7.13 представлены АФХ -1/Wнэ(A) и Wлч(jω). Кроме того в нее вводится звено чистого запаздывания. Определить критическое время чистого запаздывания, при котором в нелинейной системе возникают автоколебания.
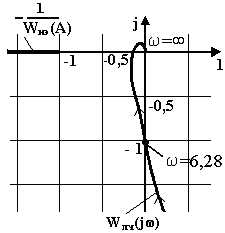 Рис.7.13.
АФХ нелинейности -1/Wнэ(A) и линейной
части Wлч(jω)
Рис.7.13.
АФХ нелинейности -1/Wнэ(A) и линейной
части Wлч(jω)
Р е ш е н и е. Известно, что звено чистого запаздывания меняет только фазовый сдвиг и не меняет амплитуду сигнала. Ближайшее расстояние АФХ обратной передаточной функции нелинейного элемента от начала координат равно (-1). Модуль АФХ линейной части, равный единице, приобретает свое значение на частоте ωср= ωкр= 6,28. Запас по фазе равен φкр= φзап= -90°=-π/2. Тогда τкр= φкр/ωкр= 0,25 c.
Рис. 7.11. Фазовые траектории релейных систем
Анализируя фазовые траектории, можно сделать следующие выводы: 1. при взятых начальных условиях все системы устойчивы. Причем системы с двухпозиционными реле устойчивы «в большом»; 2. у систем с двухпозиционными реле наблюдаются устойчивые колебания. Абсцисса предельного цикла определяет амплитуду колебаний Ао, а частота может быть определена из ординаты предельного цикла Аоωо; 3. система с трехпозиционным реле с зоной нечувствительности имеет «особый отрезок». Система может после прохождения переходного процесса занять любое значение внутри зоны нечувствительности, как показано на рис.7.11.
Задача 14. Определить дискретную передаточную функцию системы, непрерывная часть которой состоит из ПИ — регулятора и нейтрального объекта, а в качестве импульсного элемента используется экстраполятор нулевого порядка и экстраполятор с АИМ 1-го рода. Принять период дискретности Т0=2с, общий коэффициент усиления К=20 с-2, посто-янную времени τ=5 с, импульсы длительности γ=0,2 с.Р е ш е н и е. В соответствии с формулой (8.7) передаточная функция цифровой системы (экстраполятор нулевого порядка)
В соответствии с таблицами z — преобразований [2,6] находим
В соответствии с формулой (8.10) передаточная функция импульсной системы (экстраполятор с АИМ 1-го рода)
В соответствии с таблицами z — преобразований находим
Как видим, передаточные функции импульсной системы в значительной степени зависят от вида и параметров экстраполяторов, что необходимо
Задача 15.Построить логарифмические частотные характеристики импульсной системы с экстраполятором нулевого порядка, период дискретности которой To=2с, а передаточная функция непрерывной части
.
Р е ш е н и е. Выбираем частоту среза ωcр<2/To<1 c-1. В соответствии с заданными постоянными времени для непрерывной части определяем сопрягающую частоту ωcопр1=1/5=0.2c-1— низкочастотный диапазон. В соответствии с уравнением (8.18) передаточная функция от псевдочастоты будет иметь вид:
, где = 0.
В соответствии с уравнением (8.19) фазочастотная характеристика будет иметь вид:
На рис.8.9 представлены асимптотические ЛЧХ, соответствующие λср=ωср=0,5; λсопр1=ωсопр1=1/5=0,2; λсопр2=1/1=1. Коэффициент усиления К может быть выбран из условия прохождения среднечастотного участка через λсрс наклоном -20 дБ/дек.
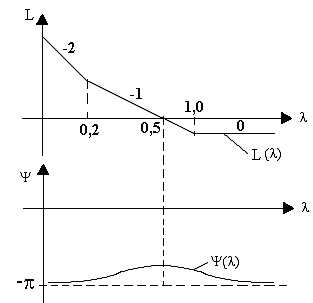 Рис.
8.9. ЛЧХ импульсной системы
Рис.
8.9. ЛЧХ импульсной системы
Задача 16. Дать заключение об устойчивости импульсной системы, характеристическое уравнение которой D(z)=10z3+4z2+6z+2+0.Р е ш е н и е. Для ответа на поставленный вопрос воспользуемся билинейным преобразованием, т.е. сделаем подстановку в характеристическое уравнение (8.11)
Тогда получим характеристическое уравнение от wD(w)=5w3+ 13w2+ 11w+ 11=0. Используя критерий Гурвица на основании линейной ТАУ для системы третьего порядка необходимым и достаточным условием устойчивости является произведение средних членов характеристического уравнения должно быть больше произведения крайних, т.е. 11*13 — 5*11 = 88>0. Таким образом импульсная система устойчива.
Задача 17.Написать разностное уравнение, связывающее выходную координату y[nT] и входное воздействие x[nT] импульсной системы, передаточная функция которой
Р е ш е н и е. В соответствии с дискретной передаточной функцией первоначально надо составить структурную схему в виде одной из форм рис.1. Представим заданную W(z) в форме 1
Домножим числитель и знаменатель W(z) на z-2. В результате получим
Разностное уравнение имеет вид: y[n] -2y[n-1] +y[n-2] = 240 x[n-1] -160 x[n-2]. Тогда выходная переменная может быть получена, как (при нулевых начальных условиях) y[n] = 2y[n-1] -y[n-2] + 240 x[n-1] -160 x[n-2]. В соответствии с последним уравнением расчетная структурная схема представлена на рис.8.14
Рис.1. Расчетная структурная схема импульсной системы
Задача 18. Определить скоростную ошибку регулирования импульсной системы при подаче на вход управляющего воздействия g(t)=g1t, если ее разомкнутая передаточная функция
Период квантования То=2 с.Р е ш е н и е. В соответствии с формулой (8.22) и таблицей z — преобразований для линейно нарастающего сигнала, получим
Этот результат вполне закономерен, так как система обладает астатизмом второго порядка.
Задача 19. Пусть передаточная функция разомкнутой системы W(p)=k/(p(Tp+1)). На САУ подается полезный сигнал g(t)=g1t и помеха «белый шум» со спектральной плотностью Sf(ω)=N. Определить систематическую ошибку mεи среднеквадратическую ошибку σ. Структурная схема представлена на рис.1.
Рис.1. САУ со случайным сигналом
Р е ш е н и е. Систематическая ошибка определяется с применением коэффициентов ошибок
Тогда mε=0*g1t + g1(1/k)=g1/k.Дисперсия ошибки по формуле (9.20)
Для системы второго порядка величина интеграла J2 вычисляется по формуле [2,19]
где т.е. bo=0; a2=k; b1=k; a0=T; a1=1. Очевидно Dε=Nk/2 или.
Из полученных результатов следует, что увеличение общего коэффициента передачи разомкнутой цепи системы k с одной стороны ведет к уменьшению установившегося значения систематической ошибки системы mε. В тоже время, для уменьшения дисперсии ошибки, вызванной помехой на входе, необходимо, чтобы значение общего коэффициента передачи разомкнутой цепи системы k было минимально.
Задача 20. Оценить свойства управляемости и наблюдаемости САУ, заданной уравнениями состояния
где:
Р е ш е н и е. Находим матрицу управляемости NУ=[B | AB]
Так как ранг r=2=n , то система полностью управляема. Находим матрицу наблюдаемости NН=[CT| (CA)T]
Так как ранг r=2=n, то САУ полностью наблюдаема.
Задача 21 . Определить управляемость САУ третьего порядка n=3 с одним управляющим воздействием m=1, представленных уравнениями состояния x=Ax + Bu с матрицами системы А и В вида
Р е ш е н и е. Тогда матрица управляемостиdet(Ny)=-27, rang(Ny)=n=3, т.е. система управляема.
studfiles.net
Решение задач по ТАУ
Решение задач по ТАУ
(смотрите также решение задач по материаловедению)
Как и многие другие специальные дисциплины, теория автоматического управления способна вызвать проблемы у студентов, которые сталкиваются с ней впервые. Теория вызывает чувство недоумения, а решение задач по ТАУ кажется чем-то не для земного ума. На самом деле, конечно, там нет ничего запредельно сложного (по крайней мере, в учебном курсе). Однако как переубедить эмоции, которые криком кричат – «Это какой-то кошмар!»?
ТАУ – это не только специальная, но и специфическая дисциплина. Понимание теории в ней само по себе требует достаточно специфического склада ума (впрочем, на профильных факультетах это нормально), но и затрат времени, не говоря уже о решении задач по ней. Увы, не все студенты могут затратить достаточно времени и сил на все предметы своего расписания. Некоторые работают и вынуждены тратить время на зарабатывание денег, другие предпочитают уделить внимание более важным для своего будущего предметам. Тем более далеко не во всех случаях ТАУ оказывается предметом, важным в реальной практической работе.
Но попробуйте объяснить это преподавателю, который ждёт от студентов полного погружения в свой предмет, и для него неважно, сколько ещё экзаменов в вашей сессии! Он потребует от вас понимания предмета, на которое надо тратить много времени. К тому же специфика здесь такова, что примеры задач по ТАУ не получится механически приложить к другим исходным условиям – нужно действительно понимать суть дисциплины.
Пример оформления задач по ТАУ нашими специалистами:
Есть ли универсальные методы решения задач по ТАУ? Как ни парадоксально, есть. Один из таких методов – решение задач по ТАУ на заказ. Мы предлагаем вам решения от самых лучших специалистов, преподавателей, знакомых не только с теорией автоматического управления как таковой, но и с учебными курсами по этому предмету. Предлагаем решение задач по различным системам автоматического управления (дискретным, линейным, нелинейным).
Мы поможем вам разобраться с самыми разными заданиями по ТАУ, с контрольными работами по этому предмету, с подготовкой к лабораторным работам, с решением задач для курсовых и дипломных работ и с подготовкой к защите учёных степеней. Мы также можем помочь вам с решением исследовательских задач в рамках исследовательских действий.
Выполненные нашими специалистами решения задач по ТАУ будут не только верными, но и подробными, с пояснениями по каждому шагу. Более того, такие задачи можно не только показать преподавателю и рассчитывать на хорошую оценку. Они станут для вас подспорьем в реальном освоении ТАУ, когда вы возьмётесь за это дело. А вы ведь возьмётесь, правда? Нам бы хотелось, чтобы наши услуги стали для вас не поводом отказываться от самостоятельной работы, а помощью в ней.
Вникнув в ход решения задачи, вы сможете не только вручить преподавателю распечатку, но и аргументированно пояснить своему преподавателю все шаги решения задачи. Кроме ответа, вы получаете набор практических знаний и рекомендаций по дальнейшему решению задач. Благодаря прямому сотрудничеству с автором вы получаете постоянные консультации в реальном времени, возможность уточнять и корректировать задание, и всё это за более чем разумную плату. В случае каких-либо изменений в содержании задания или сроках его сдачи вы можете сразу сообщить об этом нам, чтобы мы откорректировали план действий. Мы предлагаем также большой выбор вариантов оплаты (электронные деньги, банковские переводы и т.д.)
Примеры решений задач по ТАУ вы можете увидеть на нашем сайте (однако помните, что предмет достаточно нетривиален, и механическая подстановка данных одних задач в условия других может и не дать верного ответа!)
Заказать нам работу!
dx-dy.ru
Задачи теории автоматического управления
Теория автоматического управления изучает общие принципы построения автоматических систем и методы их исследования, независимо от физических процессов, протекающих в этих системах. Основными задачами теории управления являются исследования статических (или установившихся) и динамических свойств автоматических систем и разработка систем, свойства которых удовлетворяют заданным требованиям. При создании системы автоматического управления необходимо оценить её ожидаемое поведение при эксплуатации и предусмотреть такие технические решения устройства управления, которые обеспечили бы достижение требуемого результата управления во всех предусмотренных случаях функционирования объекта управления.
Управление представляет собой процесс, протекающий в реальном времени функционирования объекта управления. Этот процесс характеризуется изменением состояния объекта управления, изменением управляющих воздействий, изменением возмущений и т.д. Характер таких изменений может быть различным, в том числе и недопустимым с точки зрения цели функционирования объекта. Все эти особенности необходимо выявить ещё до реализации системы автоматического управления.
На рис. 8 показаны процессы, возможные в системе автоматического регулирования скорости вращения вала двигателя при разных характеристиках регулятора. Характеристики регулятора могут меняться в процессе его изготовления и настройки. Управляемой величиной в рассматриваемом примере является угловая скорость вращения вала двигателя. За единицу принята номинальная скорость вращения вала.
График 1 относится к случаю, когда двигатель медленно и плавно набирает обороты выходного вала до установления заданной скорости вращения. На внешние возмущения регулятор в этом случае будет реагировать медленно и переходные процессы в системе растягиваются во времени.
В случае 2 переходный процесс в системе также плавный, но протекает существенно быстрее, чем в первом случае. Следовательно, регулятор будет быстро реагировать на возникающие возмущения, плавно и быстро устраняя их последствия. Быстродействие системы высокое.
В случае, иллюстрируемом графиком 3, переходный процесс носит колебательный характер. Заданная скорость вращения устанавливается медленно, и процесс сопровождается периодическими колебаниями скорости вращения, которые постепенно затухают. При этом на начальном отрезке процесса наблюдается существенное превышение заданной скорости вращения вала, или перерегулирование. Перерегулирование, как правило, – нежелательное свойство системы автоматического управления. Колебательный процесс приводит к возникновению в системе знакопеременных динамических нагрузок, что является нежелательным свойством системы с колебательным переходным процессом.
В случае 4 процесс в системе также носит колебательный характер, однако с течением времени процесса колебания не только не затухают, но, наоборот, их амплитуда возрастает. Вал двигателя в этом случае будет вращаться в неустойчивом режиме: то останавливаясь, то набирая предельную скорость вращения. Использовать двигатель в таком режиме нельзя, и система автоматического управления становится неработоспособной. Системы с подобными свойствами называют неустойчивыми.
При проектировании системы автоматического управления необходимо стремиться получить наилучший процесс в системе, так чтобы нужный режим устанавливался плавно и за минимальное время. Проектируемая система должна иметь достаточно высокое быстродействие. Кроме того, отклонения управляемой величины от заданного значения (ошибка системы) не должны превышать допустимых значений. Система автоматического управления должна обеспечивать требуемую точность управления.
Во всех случаях система автоматического управления должна быть устойчивой и адекватно реагировать на задающие воздействия, переходя при изменении уставок в требуемый установившийся режим работы. При выводе системы из состояния установившегося равновесия внешними возмущениями система автоматически должна возвращаться в это состояние.
Предметом изучения теории автоматического управления являются методы, позволяющие описывать свойства системы автоматического управления математическими методами, исследовать поведение автоматической системы с использованием её математической модели и создавать системы автоматического управления с заданными свойствами.
Методы теории автоматического управления позволяют решать следующие задачи для систем автоматического управления:
создание системы автоматического управления с заданными свойствами, определяющими быстродействие системы и точность управления (задача синтеза системы).
studfiles.net
Бороденко В.А. Сборник задач по ТАУ
1 Одномерные линейные непрерывные системы
1.1 Передаточная функция
1.1.1 Структурные преобразования Как правило, по структурной схеме при известных функциях
передачи отдельных звеньев требуется найти эквивалентную передаточную функцию (ПФ) некоторого объединения звеньев (объекта, регулятора), либо всей системы в целом. Для этого используют правила преобразования последовательного, параллельного и встречно-парал-лельного (с обратной связью) соединений.
Эквивалентная передаточная функция последовательно соединенных звеньев равна произведению передаточных функций этих звеньев. Считают, что перестановка последовательно включенных по пути сигнала звеньев не влияет на результат, т. е. W1W2 =W2W1.
Эквивалентная передаточная функция параллельно соединенных звеньев равна сумме передаточных функций этих звеньев (с учетом знака входа сумматора на пути сигнала).
Путь от входа к выходу системы называется прямой связью, от выхода ко входу – обратной связью. Если сигнал на пути меняет знак (обычно на инвертирующем входе сумматора), обратная связь называется отрицательной (ООС), если не меняет знак – положительной (ПОС). Замкнутый путь называется контуром, например, замкнутый контур обратной связи (ЗКОС). Эквивалентная передаточная функция соединения с обратной связью равна дроби, в числителе которой записана ПФ звена на прямом пути, а в знаменателе – единица минус произведение ПФ звеньев по замкнутому контуру обратной связи. Ве-
n
личина 1n 1 Wi называется определителем ЗКОС.
i 1
Особенности этого вида соединения звеньев:
-если в системе есть хоть одна обратная связь, передаточная функция системы будет всегда представлять собой дробь;
-знак перед произведением ПФ звеньев в знаменателе (в определителе ЗКОС) обычно противоположен знаку обратной связи.
Для систем с перекрещивающимися (мостиковыми) связями применяют правило переноса: в переносимую ветвь вводят фиктивное звено с передаточной функцией, равной ПФ потерянного, либо обратной ПФ появившегося при переносе элемента.
По Мейсону структурная схема может быть описана целиком, без деления на звенья. Передаточная функция многоконтурной системы образует дробь, числитель которой равен сумме произведений передаточных функций прямых путей на совокупные определители
studfiles.net
решение задач по ТАУ — FREEWRITERS
Вы изучаете теорию автоматического управления? Тогда вам будет полезна предлагаемая нашей группой авторов услуга «решение задач по ТАУ».
Мы оказываем помощь в решении задач по данной дисциплине студентам различных форм обучения любых ВУЗов. Обращайтесь к нам, если вам необходимо решение задач по теории автоматического управления любой сложности и в любых объемах.Мы предоставим вам решение в минимальные сроки, что поможет избежать проблем.
Пример оформления раздела РГР по ТАУ нашими специалистами:
Теория автоматического управления – дисциплина специфическая. И в большинстве случаев, чтобы справиться с задачами по ней, необходимо глубокое понимание темы и знание теории. Далеко не все студенты могут себе позволить тратить большое количество времени, чтобы разобраться во всех вопросах. Тем более что некоторые их них не так уж и важны, но задачи, связанные с ними все равно задаются преподавателями. Просто перечитать примеры задач по ТАУ, и решить поставленные перед вами по шаблону не получиться. Здесь нужно действительно разбираться в теме. Так что, если вы не уверены в своих силах, и просто не обладаете временем, необходимым для выполнения задания, обратитесь к специалистам в этой области.
Что мы предлагаем в рамках предоставления услуги В состав нашей группы свободных авторов «Freewriters» входят специалисты, имеющие большой опыт работы с данной дисциплиной. Мы учитываем требования вашего вуза по оформлению задач. Обратившись к нам, клиент, которому необходимо решение задач по данному предмету, получает не просто готовый ответ. Мы предоставляем все необходимые пояснения по ходу решения задач, за счет чего вы можете защитить решение, и показать преподавателю свою компетентность.
Решение ТАУ на заказ: какие задания мы выполняем Обращайтесь к нам, если вам необходимо выполнить домашнее задание по теории автоматического управления:
— в рамках контрольных работ поданной дисциплине;
— в ходе проведения лабораторных работ;
— при выполнении курсовых и дипломных работ;
— в рамках исследовательских действ мероприятий;
— при подготовке к защите различных ученых степеней.
Если вам нужно решение задач по дискретным, линейным или нелинейным системам автоматического управления, или любым другим разделам данной дисциплины, мы выполним их.
Решение ТАУ: сотрудничество с автором напрямую Обратившись к нам, вы сотрудничаете с тем, кто занимается решением задач по ТАУ для вас, напрямую. А это значит, что при возникновении вопросов по порядку решения задач и их оформления вы всегда сможете оперативно получить ответ на них.
Сотрудничество с исполнителем напрямую — это еще и приемлемая стоимость услуг. Ведь в этом случае отсутствуют какие-либо посредники, которым необходимо платить деньги. Возможность заказа онлайн и удобные для студентов варианты оплаты При обращении к нам вы можете оформить заявку на решение задач в режиме онлайн. Вам просто нужно будет отправить нам условие задачи при помощи специальной формы, указать особенности (если они есть) и ждать решения. Мы предлагаем различные варианты оплаты услуг. Вы можете заплатить при помощи банковской карточки, электронными деньгами и т.д. Специалисты, решающие для вас задачи на заказ, знакомы с общими требованиями для всех ВУЗов, а также со специфическими особенностями каждого учебного заведения. Так что, обращайтесь к нам смело, и мы без проблем решим любые задачи.
freewriters.narod.ru
задачи по практике ТАУ

1.ЗАДАЧИ ПО ТАУ ДЛЯ МАГИСТРАНТОВ
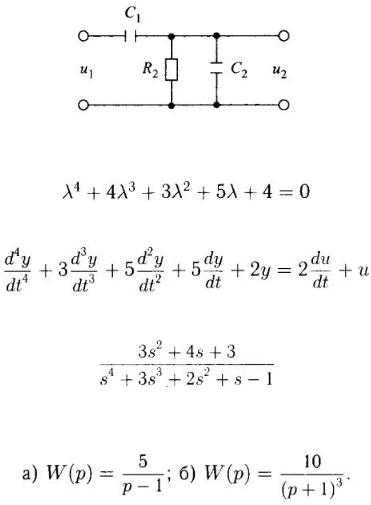
1)Определить передаточную функцию в операторной форме системы управления, которая описываются следующим уравнением:
2)Записать дифференциальное уравнение системы управления передаточные функция которой имеет следующий вид:
3)Определить весовую и переходную функции для звена со следующей передаточной функцией:
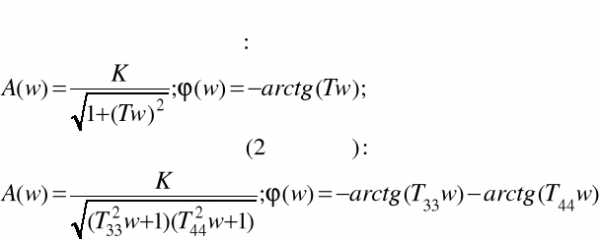
4)Определить частотную передаточную функцию, вещественную, мнимую, амплитудную, фазовую, логарифмическую амплитудную частотные функции, переходную и весовую функции апериодического звена.
5)На вход системы подается сигналu = 2sin 0,5t. Определить в установившемся режиме реакцию системы со следующей передаточной функцией:
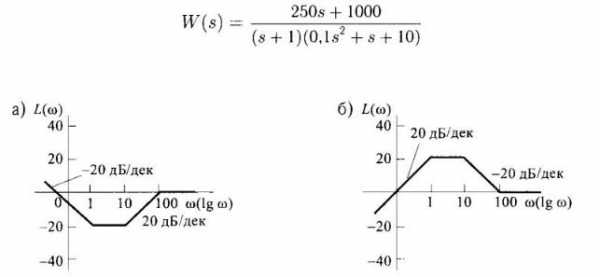
6)Построить асимптотическую ЛАЧХ звена со следующей передаточной функцией:
7)Записать передаточные функции звеньев, если их асимптотические ЛАЧХ имеют следующий вид:
8) Для системы на рисунке определить следующие передаточные функции (ПФ):
а) | Wyg — ПФ относительно входа g и выхода у, |
б) | Wyf — ПФ относительно входа f и выхода y. |
9) Составить передаточную функцию для пассивного четырехполюсника, показанного на рисунке: C1 = 4 мкФ, R2 = 200 кОм, С2 = 1 мкФ.
10)Исследовать устойчивость системы управления, у которой характеристическое уравнение имеет следующий
вид:
11)Исследовать устойчивость системы управления, которая описывается следующим уравнением:
12)Исследовать устойчивость замкнутой системы при следующей передаточной функции разомкнутой систе-
мы:
13)Пользуясь критерием Найквиста исследовать устойчивость замкнутой системы, если передаточная функция разомкнутой системы имеет вид:
14)Передаточная функция разомкнутой системы W(p) = k/(Тр+ 1)3. Определить область устойчивости замкнутой системы на плоскости параметров (к,Т).
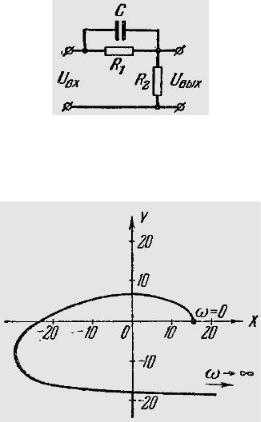
15) Найти уравнение кривой, представляющей собой амплитудно-фазовуюхарактеристику дифференцирующего звена, изображенного на рисунке. Построитьамплитудно-фазовуюхарактеристику звена для случаяR1 = 40
кОм, R2 = 10 кОм, С = 2,5 мкф.
16) Система автоматического управления имеет характеристическое уравнение четвертого порядка. Кривая Михайлова системы приведена на рисунке. Определить устойчивость автоматической системы.
17) Система автоматического управления имеет характеристическое уравнение пятого порядка. На рисунке приведена кривая Михайлова системы. Определить число корней характеристического уравнения с отрицательной вещественной частью и число корней характеристического уравнения с положительной вещественной частью.
2.ТЕМЫ ДЛЯ РЕФЕРАТОВ
1)Качество систем автоматического управления;
2)Основы синтеза линейных систем автоматического управления;
3)Математическое описание дискретных систем;
4)Улучшение качества процессов управления при помощи корректирующих звеньев;
5)Адаптивные системы автоматического регулирования;
6)Чувствительность автоматических систем;
7)Оптимальные процессы в САУ.
8)Частотные методы исследования устойчивости САУ.
9)Использование метода переменных состояния в ТАУ.
Объем реферата не менее10 страниц. В случае, если исследуемая тема имеет значительный объем, выделить основные ее моменты или рассмотреть1-2основных метода анализа/синтеза в заданной области ТАУ. По итогам реферата подготовить доклад на5-10минут, раскрывающий основные положения выбранной темы.
3.ЛИТЕРАТУРА
1)Попов Е.П. Теория линейных систем автоматического управления и регулирования.
2)Филипс Ч., Харбор Р. Системы управления с обратной связью.
3)Бесекерский В.А., Попов Е.П. Теория систем автоматического управления.
4)Ким Д.П. Теория автоматического управления. т1. Линейные системы.
5)Ким Д.П. Теория автоматического управления. т2. Многомерные, нелинейные, оптимальные и адаптивные системы.
6)Лурье Б.Я., Энрайт П. Дж. Классические методы автоматического управления.
7)Лукас. Теория управления техническими средствами.
8)Цыпкин Я.З. Основы теории автоматических систем.
9)Мирошник И.В. Теория автоматического управления: Линейные системы.
10)Мирошник И.В. Теория автоматического управления: Нелинейные и оптимальные системы.
11)Дорф Р., Бишоп Р. Современные системы управления.
12)Бесекерский В.А, Цифровые автоматические системы.
studfiles.net