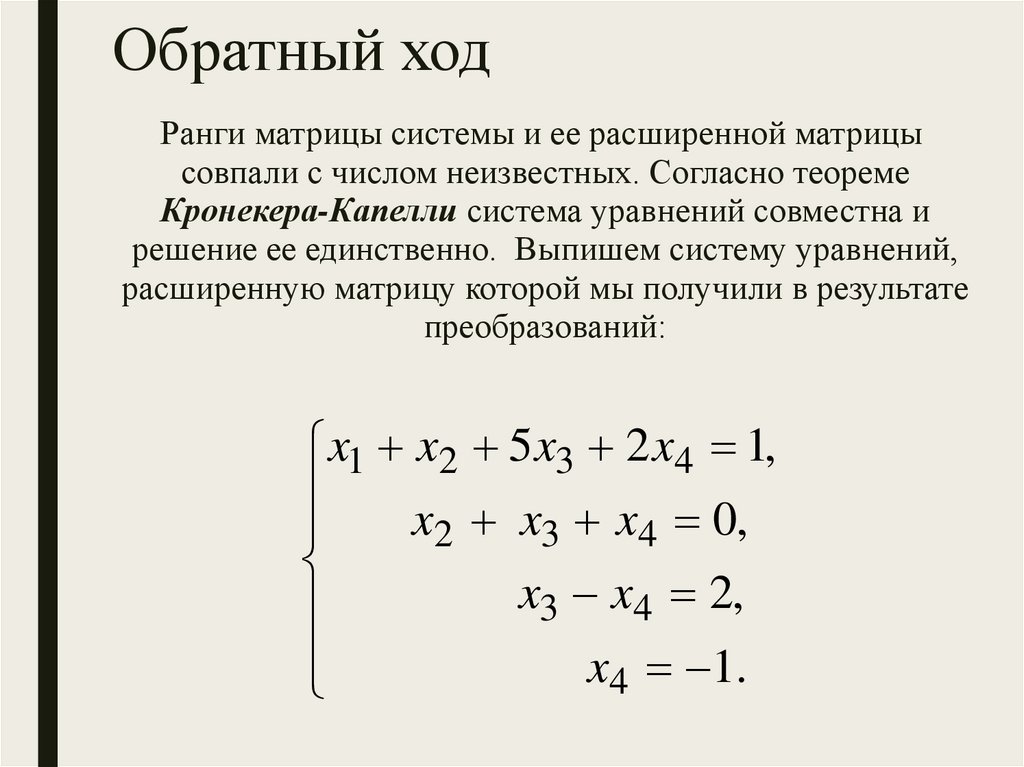
§4. Фундаментальная система решений системы линейных однородных уравнений. Ядро линейного оператора и его базис.
Рассмотрим систему линейных однородных уравнений с неизвестными ранга .
Теорема. Множество решений системы (1) является подпространством -мерного арифметического пространства Rn.
Для доказательства теоремы достаточно проверить два свойства:
1. Если и два решения системы (1), то их сумма
также решение этой системы. Для этого подставим этот набор чисел в i-тое уравнение системы (1), где i=l,m, получим:
Значит, является решением системы уравнений (1).
2. Докажем, что произведение любого решения системы (1) на любое число также является решением той же системы уравнений.
Подставим набор чисел в левую часть i-того ур-ния системы (1):
Значит,
является
решением системы уравнений (1).
Опр. Базис подпространства решений системы линейных однородных уравнений называется фундаментальной (базисной) системой решений (ФСР).
Как следует из определения базиса, фундаментальная система решений обладает двумя свойствами: решения, составляющие ФСР, линейно независимы, любое решение системы есть линейная комбинация фундаментальной системы решений. Теорема (о ФСР). Если ранг системы линейных однородных уравнений с неизвестными равен , то ФСР состоит из решений.
Опр. Множество векторов линейного пространства, переходящих в нулевой вектор под действием линейного оператора , называется ядром оператора и обозначается как ker .
Теорема. Ядро оператора является подпространством линейного пространства, в котором задан линейный оператор .
Доказательство. Пусть ,
тогда и .
Сложим эти равенства, получим ,
так как
линейный оператор, то в силу линейности
,
получим ,
откуда следует, что .
Аналогично, из
следует,
что .
В силу линейности ,
отсюда . Значит,
ker
— подпространство. Ч.т.д.
Пусть ,
тогда и .
Сложим эти равенства, получим ,
так как
линейный оператор, то в силу линейности
,
получим ,
откуда следует, что .
Аналогично, из
следует,
что .
В силу линейности ,
отсюда . Значит,
ker
— подпространство. Ч.т.д.
Рассмотрим в линейном пространстве базис и оператор , который задается в данном базисе матрицей
А=
Тогда ядро оператора задается уравнением
или системой уравнений:
Фундаментальные решения системы (3) задают базисы ядра оператора , заданого матрицей А.
Квадратичной формой от неизвестных называется сумма вида где .
Лемма. Знак
определителя матрицы квадратичной
формы не зависит от выбора базиса.
Теорема. Квадратичная форма является положительно определенной тогда и только тогда, когда ее нормальный вид , то есть если и ранг, и положительный индекс инерции равны числу неизвестных.
Зам. Решить вопрос о том, является ли данная квадратичная форма положительно определенной, возможно и без приведения формы к нормальному виду. Это позволяет сделать критерий Сильвестра. Чтобы понять формулировку этого критерия, нам потребуется
Опр. Пусть — матрица квадратичной формы. Обозначим через минор матрицы А, элементы которого расположены в ее первых k строках и первых k столбцах. Другими словами,
Будем называть эти миноры главными минорами квадратичной формы.
Теорема (критерий
Сильвестра). Квадратичная форма является положительно
определенной тогда и только тогда, когда все ее главные миноры строго положительны.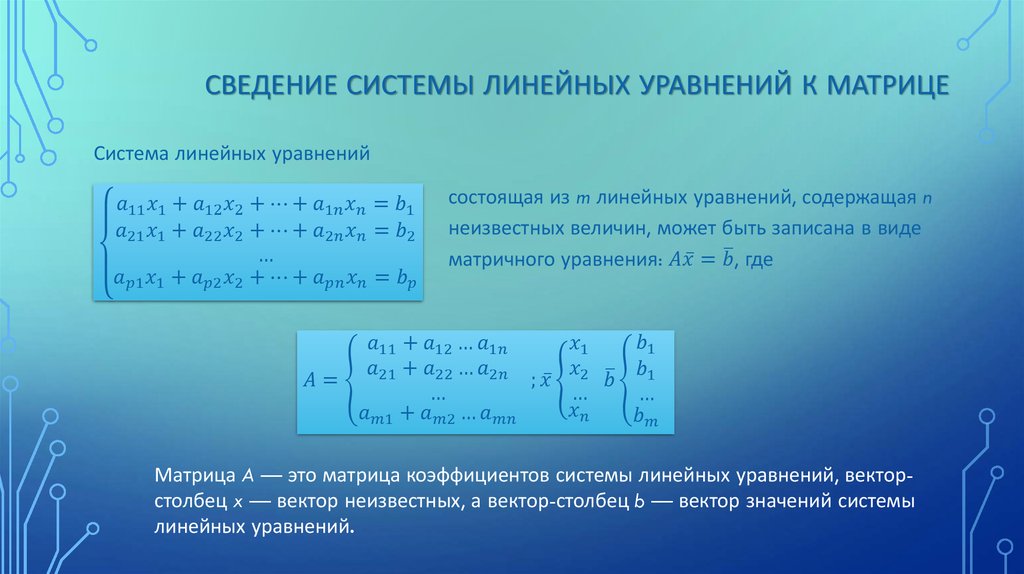
Проведем методом математической индукции по числу переменных. База индукции:
. Очевидно, что эта квадратичная форма будет положительно определенной тогда и только тогда, когда .
Шаг индукции: Предположим, что квадратичная форма от переменных является положительно определенной, тогда и только тогда, когда все ее главные миноры строго положительные.
Докажем, что это утверждение справедливо и для квадратичной формы от переменных.
Пусть теперь дана квадратичная форма от переменных .
В квадратичной форме соберем все члены, не содержащие переменного , тогда, очевидно, мы получим квадратичную форму f от -переменных. Тогда можно записать в виде
(1)
Покажем,
что если
является
положительно определенной, то также
положительно определена. Докажем это
методом от противного. Предположим, что
— положительно определена,
не является положительно определенной. Значит, существуют такие значения
переменных, ,
среди которых не все равны нулю, при
которых.
Значит, существуют такие значения
переменных, ,
среди которых не все равны нулю, при
которых.
. Полагая дополнительно , подставим в (1). Получим , что невозможно, так как положительно определена. Значит, если положительно определена, значит, также является положительно определенной. Кроме того, очевидно, что главные миноры квадратичной формы являются одновременно главными минорами квадратичной формы .
Необходимость. Пусть является положительно определенной. Докажем, что все главные миноры строго положительны.
Так как положительно определена, значит по доказанному раннее также положительна. Тогда по допущению все главные миноры положительны. Осталось доказать, что
Всякую положительную квадратичную форму с помощью невырожденного линейного преобразования можно привести к нормальному виду с матрицей , определитель которой равен 1 > 0
По
лемме, знак определителя матрицы
квадратичной формы не меняется.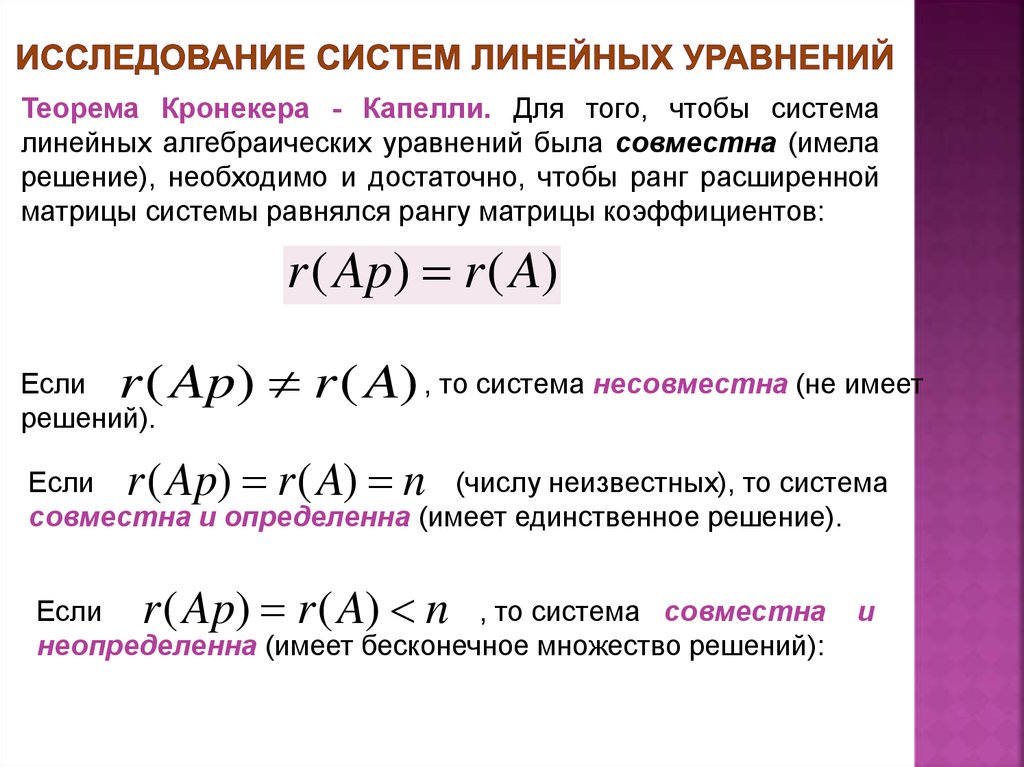 Значит, .
Значит, .
Достаточность. Пусть
строго положительны все главные миноры
Так как положительны, то по индуктивному предположению является положительно определенной. Следовательно, существует невырожденное линейное преобразование переменных , которое приводит форму
к виду .
Это линейное преобразование можно дополнить до невырожденного линейного преобразования всех неизвестных , полагая хп =уп.
Тогда форма приводится указанным преобразованием к виду
(3)
Дополним члены, содержащие до полных квадратов:
или
где
Рассмотрим следующее невырожденное линейное преобразование
которое приводит форму к виду с матрицей , детерминант этой матрицы равен с.
По лемме, знак определителя матрицы квадратичной формы не меняется, так как (по условию), то
Значит, является положительно определенной.
Фундаментальная система решений системы однородных линейных уравнений. Связь решений однородной и неоднородной систем
Фундаментальная система решений системы однородных линейных уравнений. Связь решений однородной и
неоднородной систем
О задачах параграфа. На этом параграфе рассматриваются задачи показывающие:
1. Структуру общего решения системы однородных линейных уравнений. Основное внимание уделено двум традиционным задачам – нахождению общего решения и построению фундаментальной системы решений.
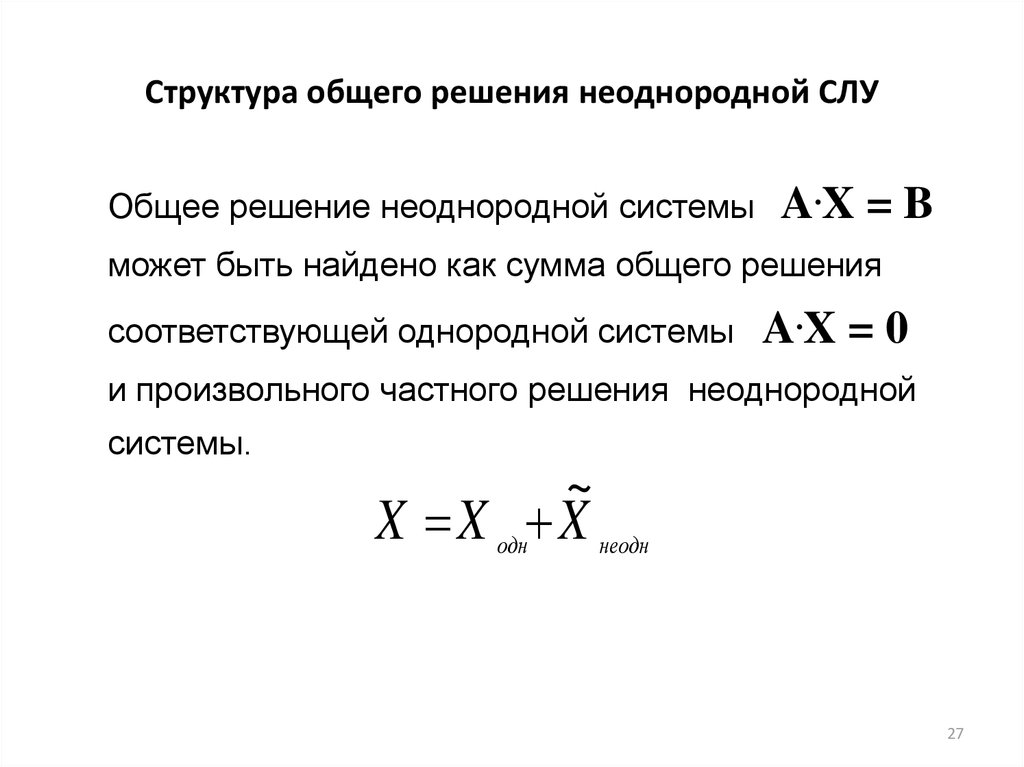
2. Связь решений однородной и неоднородной систем. Это связь заключается в том, что все решения неоднородной системы можно получить, прибавляя к одному (любому) ее решению всевозможные решения ее приведенной системы.
Кроме этого на этом параграфе рассматриваются задачи на нахождения решения матричных уравнений. Предлагаются задачи, в которых:
– матричное уравнение имеет единственное решение;
– матричное уравнение имеет бесконечно много решений;
– матричное уравнение неразрешимо.
В задачах 1 — 8 найти фундаментальную систему решений для заданных однородных систем уравнений:
В задачах 9 — 14 найти общее решение и фундаментальную систему решений для заданных систем уравнений:
В задачах 15 – 22 доказать, что заданные неоднородные системы линейных уравнений совместны, и найти их общее решение в терминах частного решения неоднородной системы и общего решения приведенной системы.
В задачах 22 – 30 решить матричные уравнения относительно квадратной матрицы второго порядка.
В задачах 31 – 37 решить матричные уравнения относительно квадратной матрицы третьего порядка.
В задачах 38 – 43 найти все матрицы , удовлетворяющее условию:
More in this category: « Нефротик синдром Эластик система нуқталарининг кўчишларини ҳисоблаш. »
back to top
3.
 3: Линейные системы ОДУ
3: Линейные системы ОДУ- Последнее обновление
- Сохранить как PDF
- Идентификатор страницы
- 364
- Йиржи Лебл
- Университет штата Оклахома
Сначала поговорим о матричных или векторных функциях. Такая функция представляет собой просто матрицу, элементы которой зависят от некоторой переменной. Если \(t\) является независимой переменной, мы пишем векторная функция \( \vec {x} (t) \) as
\[ \vec {x} (t) = \begin {bmatrix} x_1(t) \\ x_2 (t) \\ \vdots \\ x_n (t) \end {bmatrix} \nonumber \]
Аналогично, матричная функция \( A(t) \) равна
\[ A (t) = \begin {bmatrix} a_{11} (t) & a_{12} (t) & \cdots & a_{1n} (t) \\ a_{21} (t) & a_ {22} (t) & \cdots & a_{2n} (t) \\ \vdots & \vdots & \ddots & \vdots \\ a_{n1}(t) & a_{n2}(t) & \cdots & a_{nn}(t) \end {bmatrix} \nonumber \] 9{th}\) – это \(a’_{ij} (t) \).
Правила дифференцирования матричных функций аналогичны правилам для нормальных функций. Пусть \(A(t)\) и \(B(t)\) — матричные функции. Пусть \(с\) — скаляр, а \(С\) — постоянная матрица. Затем
\[\begin{align}\begin{aligned} {(A(t) + B(t))}’ &= A’ (t) + B’ (t) \\ (A(t)B(t) ))’ &= A'(t)B(t) + A(t)B'(t) \\ (cA(t))’ &= cA’ (t) \\ (CA(t))’ & = CA'(t) \\ (A(t)C)’ &= A’ (t)C \end{aligned}\end{align} \nonumber \]
Обратите внимание на порядок умножения в последних двух выражениях.
Линейная система ОДУ первого порядка — это система, которую можно записать в виде векторного уравнения
\[ \vec {x} (t) = P(t) \vec {x} (t) + \vec {f} (t) \nonumber \]
, где \( P(t) \) — матричная функция, а \( \vec {x} (t) \) и \( \vec {f} (t) \) — векторные функции. Мы часто подавляем зависимость от \(t\) и пишем только \( \vec {x} = P \vec {x} + \vec {f} \). Решением системы является векторнозначная функция \( \vec {x} \), удовлетворяющая векторному уравнению.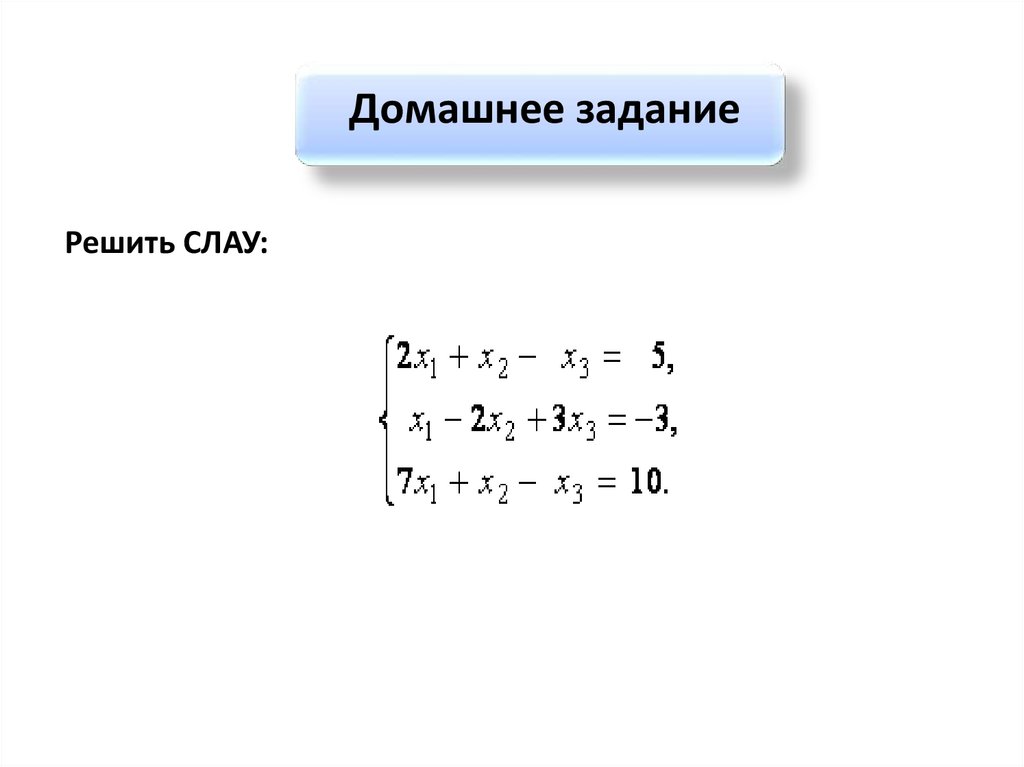 9т \end {bmatrix} \номер\]
9т \end {bmatrix} \номер\]
В основном мы сосредоточимся на уравнениях, которые не просто линейны, а фактически являются уравнениями с постоянным коэффициентом . То есть матрица \(P\) будет постоянной; оно не будет зависеть от \(t\).
Когда \( \vec {f} = \vec {0} \) (нулевой вектор), мы говорим, что система является однородной . Для однородных линейных систем действует принцип суперпозиции, как и для одиночных однородных уравнений.
Теорема \(\PageIndex{1}\)
Суперпозиция
Пусть \( \vec {x’} = P \vec {x’} \) — линейная однородная система ОДУ. Предположим, что \( \vec {x}_1, \dots, \vec {x}_n \) являются \(n\) решениями уравнения, тогда
\[ \vec {x} = c_1 \vec {x} _1 + c_2 \vec {x}_2 + \dots + c_n \vec {x}_n \nonumber \]
также является решением. Кроме того, если это система \(n\) уравнений \( (P \rm{~is~} n \times n) \) и \( \vec {x}_1, \dots , \vec {x }_n \) линейно независимы, то каждое решение можно записать в виде \(\eqref{eq:12}\).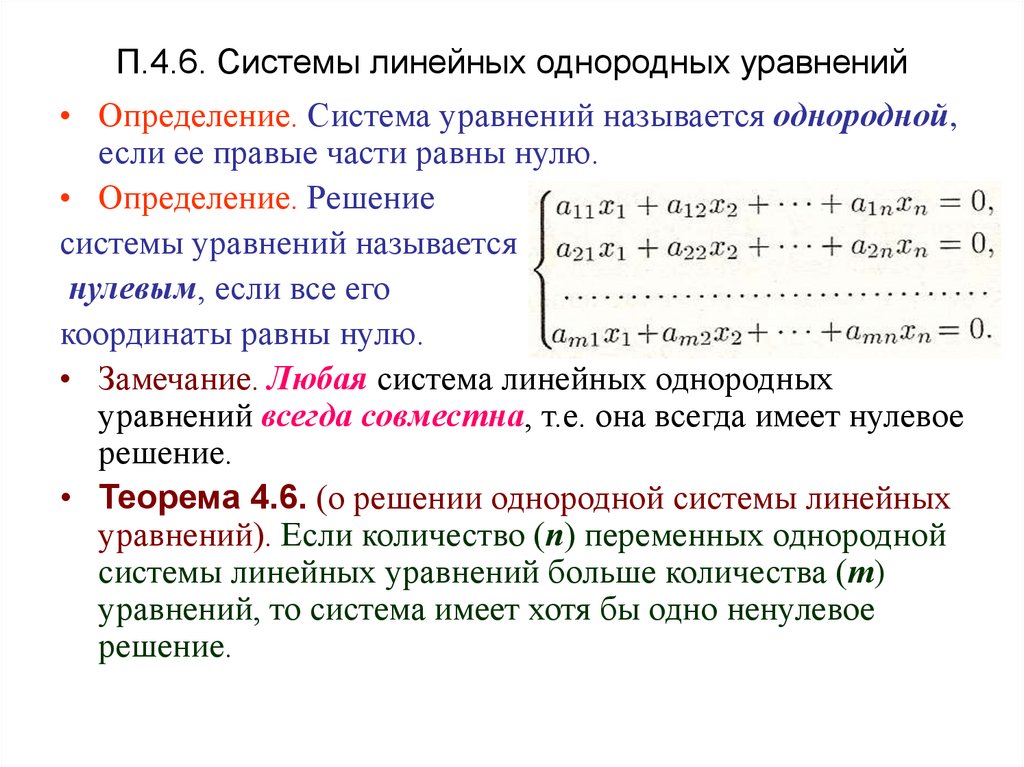 2 \\ 1 \end {bmatrix} \) линейно зависимы, так как \( \vec {x}_1 + \vec {x}_3 = \vec {x}_2\), и это верно для всех \(t\). Таким образом, \(c_1 = 1, c_2 = -1\) и \(c_3 = 1\) выше будут работать. 92 = 0\) для всех \(t\) и, следовательно, \(c_1 = 0 \). Таким образом, второе уравнение просто \(c_2t = 0\), что означает \(c_2 = 0\). Итак, \(c_1 = c_2 = c_3 = 0 \) является единственным решением, а \(\vec {x}_1, \vec {x}_2 \) и \(\vec {x}_3\) линейно независимы.
2 \\ 1 \end {bmatrix} \) линейно зависимы, так как \( \vec {x}_1 + \vec {x}_3 = \vec {x}_2\), и это верно для всех \(t\). Таким образом, \(c_1 = 1, c_2 = -1\) и \(c_3 = 1\) выше будут работать. 92 = 0\) для всех \(t\) и, следовательно, \(c_1 = 0 \). Таким образом, второе уравнение просто \(c_2t = 0\), что означает \(c_2 = 0\). Итак, \(c_1 = c_2 = c_3 = 0 \) является единственным решением, а \(\vec {x}_1, \vec {x}_2 \) и \(\vec {x}_3\) линейно независимы.
Линейная комбинация \( c_1 \vec {x}_1 + c_2 \vec {x}_2 + \dots + c_n \vec {x}_n \) всегда может быть записана как
\[ X (t) \vec {c} \номер\]
, где \( X (t) \) — матрица со столбцами \(\vec {x}_1, \dots , \vec {x}_n \), а \( \vec {c} \) — вектор-столбец с записями \( c_1, \dots , c_n \). Матричная функция \( X (t) \) называется фундаментальная матрица или решение фундаментальной матрицы .
Для решения неоднородных линейных систем первого порядка мы используем ту же технику, что и для решения одиночных линейных неоднородных уравнений.
Теорема \(\PageIndex{2}\)
Пусть \( \vec {x}’ = P \vec {x} + \vec {f} \) — линейная система ОДУ. Предположим, что \( \vec {x}_p\) — одно частное решение. Тогда каждое решение можно записать как
\[ \vec {x} = \vec {x}_c + \vec {x}_p \nonumber \]
где \( \vec {x}_c \) является решением ассоциированного однородного уравнения \( (\vec {x} = P \vec {x}) \).
Таким образом, процедура будет такой же, как и для отдельных уравнений. Мы находим частное решение неоднородного уравнения, затем находим общее решение связанного с ним однородного уравнения и, наконец, складываем их вместе.
Хорошо, предположим, что вы нашли общее решение \( \vec {x}’ = P \vec {x} + \vec {f} \). Теперь вам дано начальное условие вида \[ \vec {x} {t_0} = \vec {b} \nonumber \] для некоторого постоянного вектора \( \vec {b} \). Предположим, что \( X (t) \) является фундаментальным матричным решением ассоциированного однородного уравнения (т.е. столбцы \( X (t) \) являются решениями). Общее решение можно записать в виде
Общее решение можно записать в виде
\[ \vec {x} (t) = X (t) \vec {c} + \vec {x}_p (t) \nonumber \]
Мы ищем вектор \(\vec {c} \) такой, что
\[ \vec {b} = \vec {x} (t_0) = X (t_0) \vec {c} + \vec {x}_p (t_0) \nonumber \]
Другими словами, мы решаем относительно \( \vec {c} \) неоднородную систему линейных уравнений
\[ X(t_0) \vec {c} = \vec {b} — \vec {x}_p (t_0) \nonumber \]
Пример 3.3.2
В разделе 3.1 мы решили систему
\[\begin{align}\begin{aligned} x_1′ &= x_1 \\ x’_2 &= x_1 — x_2 \end{aligned}\end{align} \nonumber \]
с начальными условиями \( x_1 (0) = 1, х_2 (0) = 2\).
Решение
Это однородная система, поэтому \( \vec {f} (t) = \vec {0} \). Запишем систему и начальные условия как
\[ \vec {x} ‘ = \begin {bmatrix} 1 & 0 \\ 1 & -1 \end {bmatrix} \vec{x}, \quad \vec{ х}(0) = \begin{bmatrix} 1 \\ 2 \end{bmatrix} \nonumber \] 9{-t} \end{bmatrix} \nonumber \]
Это согласуется с нашим предыдущим решением из раздела 3. 1.
1.
Эта страница под названием 3.3: Линейные системы ОДУ распространяется под лицензией CC BY-SA 4.0 и была создана, изменена и/или курирована Йиржи Леблом посредством исходного контента, который был отредактирован в соответствии со стилем и стандартами платформы LibreTexts; подробная история редактирования доступна по запросу.
- Наверх
- Была ли эта статья полезной?
- Тип изделия
- Раздел или Страница
- Автор
- Йиржи Лебль
- Лицензия
- CC BY-SA
- Версия лицензии
- 4,0
- Показать страницу TOC
- нет
- Теги
- источник@https://www.
 jirka.org/diffyqs
jirka.org/diffyqs
- источник@https://www.
 jirka.org/diffyqs
jirka.org/diffyqsРешения для линейных систем
Анализ линейных систем начнется с определения возможных решений. Несмотря на то, что система может содержать любое количество уравнений, каждое из которых может содержать любое количество неизвестных, результат, описывающий возможное количество решений линейной системы, прост и однозначен. Основные идеи будут проиллюстрированы следующими примерами.
Пример 1 : Графически интерпретируйте следующую систему:
Каждое из этих уравнений задает линию на плоскости x−y , и каждая точка на каждой линии представляет собой решение этого уравнения. Следовательно, точка пересечения линий — (2, 1) — одновременно удовлетворяет обоим уравнениям; это решение системы. См. рис.
Рисунок 1
Пример 2 : Интерпретируйте эту систему графически:
Линии, заданные этими уравнениями, параллельны и не пересекаются, как показано на рисунке . Поскольку точки пересечения нет, эта система не имеет решения. (Ясно, что сумма двух чисел не может быть равна и 3, и −2.) Система, не имеющая решений, такая как эта, называется несовместной .
Поскольку точки пересечения нет, эта система не имеет решения. (Ясно, что сумма двух чисел не может быть равна и 3, и −2.) Система, не имеющая решений, такая как эта, называется несовместной .
Рисунок 2
Пример 3 : Графически интерпретируйте следующую систему:
Поскольку второе уравнение является просто постоянным кратным первого, линии, определяемые этими уравнениями, идентичны, как показано на рисунке . Ясно, что каждое решение первого уравнения автоматически является решением и второго, так что эта система имеет бесконечно много решений.
Рисунок 3
Пример 4 : Обсудите следующую систему графически:
Каждое из этих уравнений задает плоскость в Р 3 . Две такие плоскости либо совпадают, либо пересекаются по прямой, либо различны и параллельны. Следовательно, система двух уравнений с тремя неизвестными либо не имеет решений, либо их бесконечно много.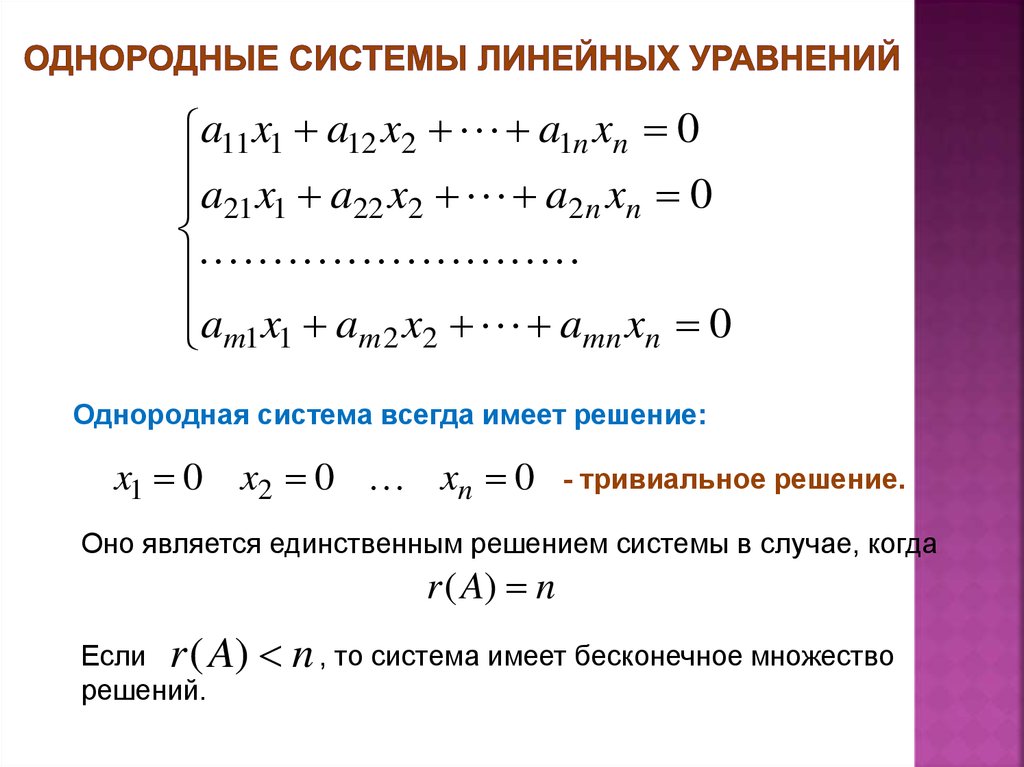 Для этой конкретной системы плоскости не совпадают, в чем можно убедиться, например, заметив, что первая плоскость проходит через начало координат, а вторая нет. Эти плоскости не параллельны, так как v 1 = (1, −2, 1) перпендикулярно первой, а v 2 = (2, 1, −3) нормальна ко второму, и ни один из этих векторов не является скалярным кратным другого. Следовательно, эти плоскости пересекаются по прямой, и система имеет бесконечно много решений.
Для этой конкретной системы плоскости не совпадают, в чем можно убедиться, например, заметив, что первая плоскость проходит через начало координат, а вторая нет. Эти плоскости не параллельны, так как v 1 = (1, −2, 1) перпендикулярно первой, а v 2 = (2, 1, −3) нормальна ко второму, и ни один из этих векторов не является скалярным кратным другого. Следовательно, эти плоскости пересекаются по прямой, и система имеет бесконечно много решений.
Пример 5 : Графически интерпретируйте следующую систему:
Каждое из этих уравнений задает линию в плоскости x−y , как показано на рисунке . Обратите внимание, что хотя любые и две этих прямых имеют точку пересечения, не существует общей для всех 9 точек.0032 три строки . Эта система противоречива.
Рисунок 4
Эти примеры иллюстрируют три возможности решения линейной системы:
Теорема A.