
8.3.3. Координаты вектора относительно данного базиса
Рассмотрим конечномерное векторное пространство V размерности n, векторы e1, e2, …, en образуют его базис. Пусть a – произвольный вектор пространства V, тогда вектор линейно выражается через векторы базиса, a = 1e1 + 2e2 + … + nen.
Теорема 8.8. Разложение вектора a по векторам базиса производится единственным образом.
Доказательство. Предположим, что вектор a можно разложить по векторам базиса двумя способами:
a = 1e1 + 2e2 + … + nen.
a = ’1e1 + ’2e2 + … + ’
После вычитания из одного равенства другого, получим
(1 – ’1) e1 + (2 – ’2)e2 + … + (n – ’n)en = 0,
из чего в силу линейной независимости базисных векторов e1, e2, …, en следует, что 1 – ’1 = 0, 2 – ’2 = 0, …, n – ’n = 0, а затем что 1 = ’1, 2 = ’2, …, n = ’n. Таким образом, коэффициенты разложения определяются однозначно. Теорема доказана.
Определение 8.13. Координатами вектора a относительно базиса e
1, e2, …, en называются коэффициенты разложения вектора a по базисным векторам.
Координаты вектора принято записывать или в виде строки координат (координатной строки) – (1, 2, …, n), или в виде координатного столбца: [a] = .
Пример 8.7. 1) В пространстве R22 вектор A = раскладывается по векторам базиса Е1, Е2, Е3, Е4 следующим образом: А = 2Е1 – Е2 + 4Е3 + 7Е4, следовательно, координатная строка этого вектора равна (2, –1, 4, 7).
2) В пространстве выбран базис
Каждому вектору a из произвольного векторного пространства V, в котором задан базис e1, e2, …, en, сопоставляется строка (или столбец) координат ( 1, 2, …, n), причем единственным образом. Если V пространство размерности n, то строка координат принадлежит пространству Rn, то есть возникает отображение: V Rn. Обратно, по строке координат (1, 2, …, n), (по вектору из Rn) единственным образом можно построить вектор a = 1e1 + 2e2+ … + nen. Для этого отображения верна следующая теорема.
Теорема 8.9. Если векторы а1, а2,
…, аm из произвольного пространства V образуют линейно независимую систему
векторов, то их строки (или столбцы)
координат тоже линейно независимы.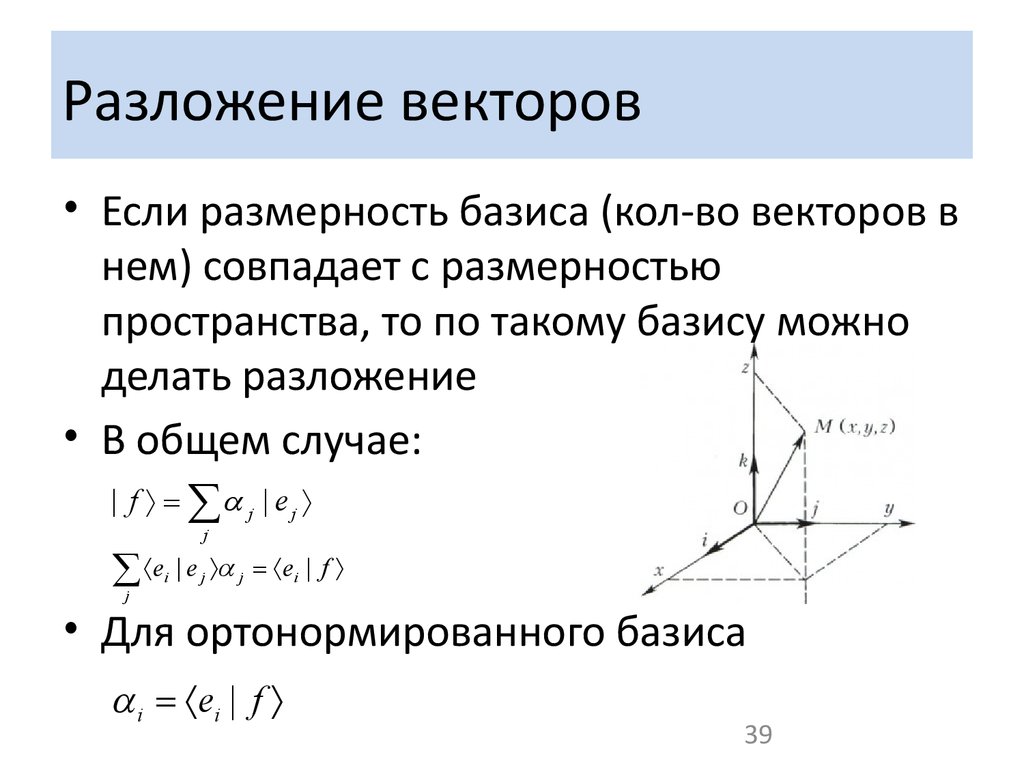
Пусть V – n-мерное векторное пространство, в котором заданы два базиса: e1, e2, …, en – старый базис, e‘1, e‘2, …, e‘n – новый базис. У произвольного вектора a есть координаты в каждом из них:
a = 1e1 + 2e2+ … + nen;
a = ’1e‘1 + ’2e‘2+ … + ’ne‘n.
Для того чтобы установить связь между столбцами координат вектора a в старом и новом базисах, надо разложить векторы нового базиса по векторам старого базиса:
e‘1 = 11e1
+ 21e2+ … + n1en,e‘2 = 12e1 + 22e2+ … + n2en,
………………………………. .
.
e‘n = 1ne1 + 2ne2+ … + nnen.
Определение 8.14. Матрицей перехода от старого базиса к новому базису называется матрица, составленная из координат векторов нового базиса относительно старого базиса, записанных в столбцы, т. е.
T = .
Столбцы
матрицы
Обозначим
столбцы координат вектора a в старом и новом базисах, соответственно,
как [a]
и [a]’.
С помощью матрицы перехода устанавливается
связь между [a]
и [a]’.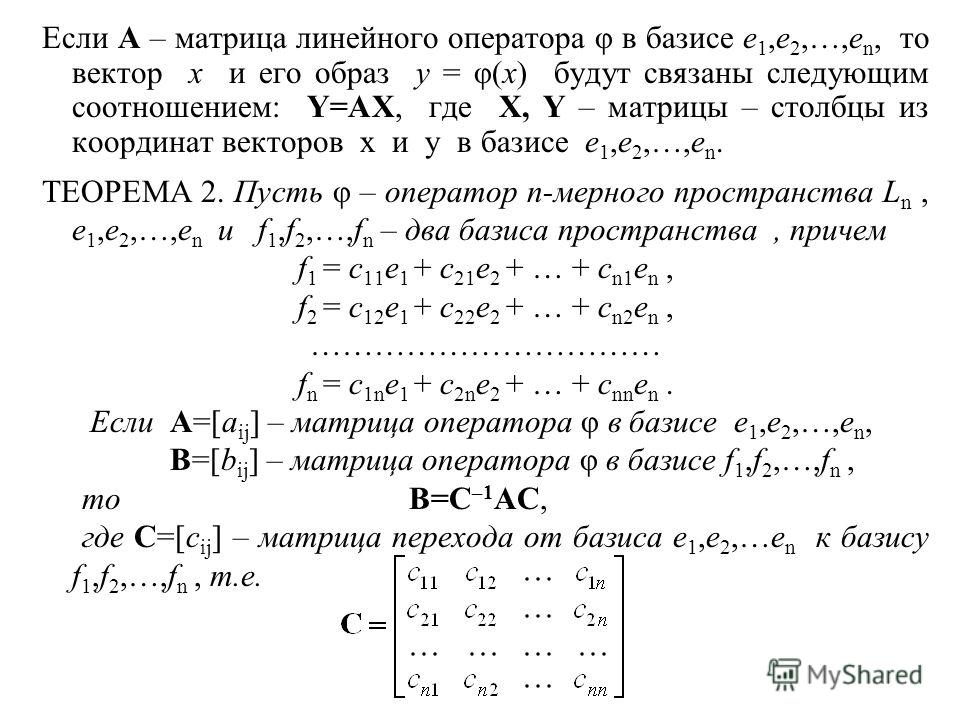
Теорема 8.10. Столбец координат вектора a в старом базисе равен произведению матрицы перехода на столбец координат вектора a в новом базисе, то есть [a] = T [a]’.
Следствие. Столбец координат вектора a в новом базисе равен произведению матрицы, обратной матрице перехода, на столбец координат вектора a в старом базисе, то есть [a]’ = T –1[a].
Пример 8.8. Составить матрицу перехода от базиса e1, e2, к базису e‘1, e‘2, где e‘1 = 3e1 + e2, e‘2 = 5e1 + 2e2, и найти координаты вектора a = 2e‘1 – 4e‘2 в старом базисе.
Решение.
Координатами новых базисных векторов
относительно старого базиса являются
строки (3, 1) и (5, 2), тогда матрица T примет вид .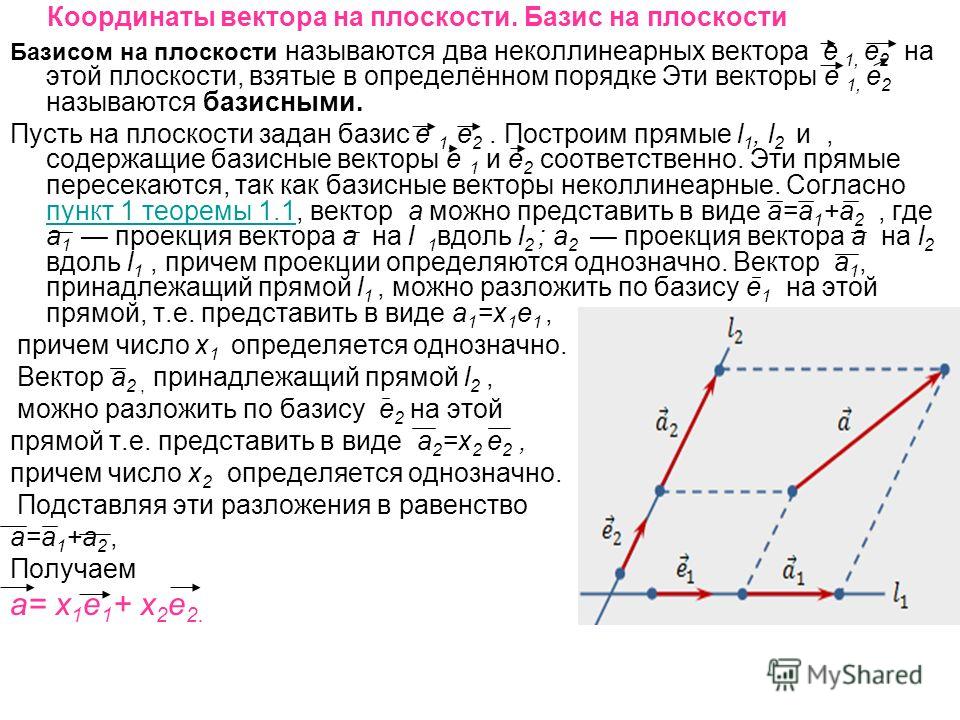 Так как [a]’ = ,
то [a] = = .
Так как [a]’ = ,
то [a] = = .
Пример 8.9. Даны два базиса e1, e2 – старый базис, e‘1, e
Решение. 1 способ. По условию даны координаты вектора а в старом базисе: [a] = . Найдем матрицу перехода от старого базиса e1, e2 к новому базису e‘1, e‘2. Получим матрицу Т = для нее найдем обратную матрицу T –1 = . Тогда согласно следствию из теоремы 8.10 имеем [a]’ = T –1[a] = = .
2 способ. Так как e‘1, e‘2 базис, то вектор а раскладывается по базисным векторам следующим образом a = k1e‘1 – k
2e‘2.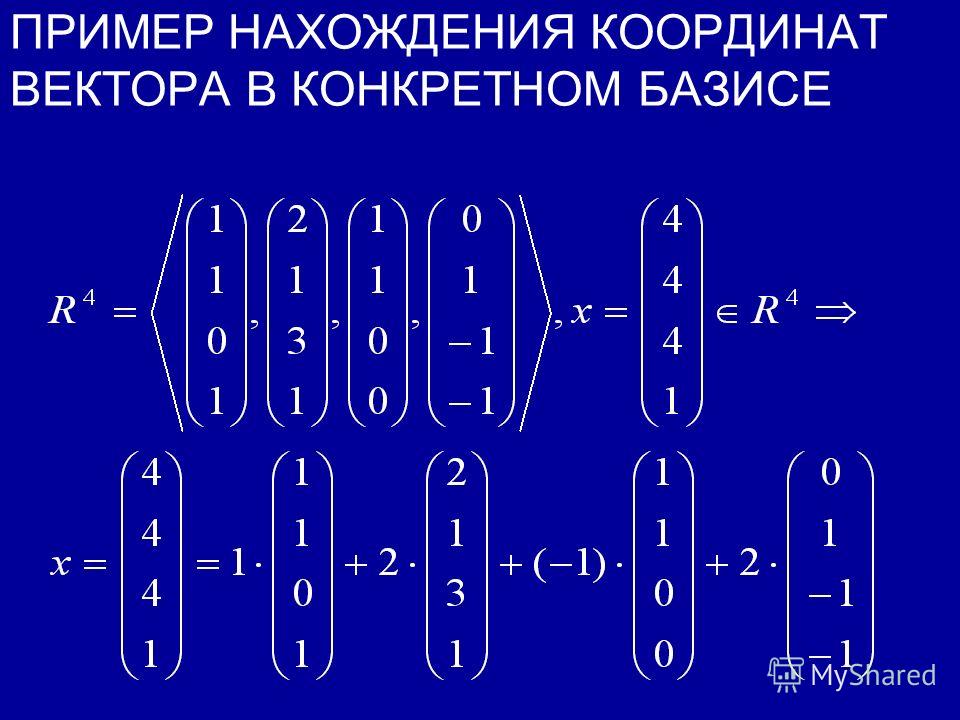 Найдем числа k1 и k2 – это и будут координаты вектора а в
новом базисе.
Найдем числа k1 и k2 – это и будут координаты вектора а в
новом базисе.a = k1e‘1 – k2e‘2 = k1(3e1 + e2) – k2(5e1 + 2e2) =
= e1(3k1 + 5k2) + e2(k1 + 2k2) = 2e1 – e2.
Так как координаты одного и того же вектора в данном базисе определяется однозначно, то имеем систему: Решая данную систему, получим k1 = 9 и k2 = –5, т. о. [a]’ = .
Базис. Координаты вектора в базисе
Определим понятие базиса на прямой, плоскости и в пространстве.
Базисом
на прямойназывается любой ненулевой
векторна этой прямой.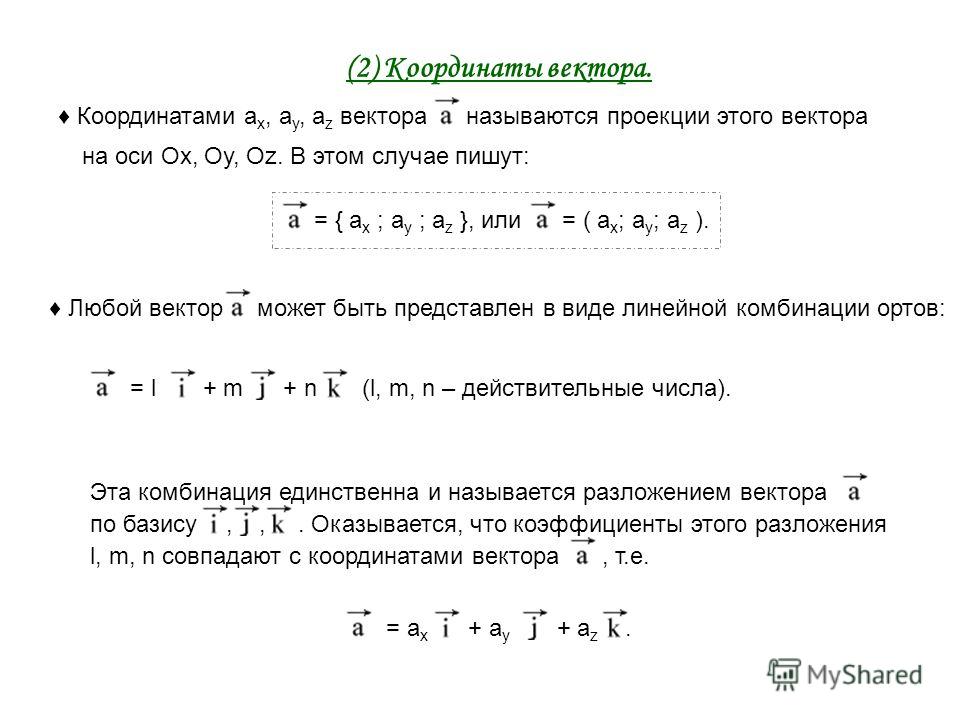 Любой другой вектор,
коллинеарный данной прямой, может быть
выражен через векторв виде.
Любой другой вектор,
коллинеарный данной прямой, может быть
выражен через векторв виде.
Базисом на плоскостиназываются любых два линейно независимых вектораиэтой плоскости, взятые в определенном порядке. Любой третий вектор, компланарный плоскости, на которой выбран базис, может быть представлен в виде.
Базисом в трехмерном пространстве называются любые три некомпланарных вектора , взятые в определенном порядке. Такой базис обозначается. Пусть‑ произвольный вектор трехмерного пространства, в котором выбран базис. Тогда существуют числатакие, что:
(4.5) |
Коэффициенты называются координатами векторав базисе, а формула (4.5) есть разложение векторапо данному базису.
Координаты
вектора в заданном базисе определяются
однозначно. Введение координат для
векторов позволяет сводить различные
соотношения между векторами к числовым
соотношениям между их координатами. Координаты линейной комбинации векторов
равны таким же линейным комбинациям
соответствующих координат этих векторов.
Координаты линейной комбинации векторов
равны таким же линейным комбинациям
соответствующих координат этих векторов.
Декартовы прямоугольные координаты в пространстве. Координаты точек. Координаты векторов. Деление отрезка в данном отношении
Декартова прямоугольная система координат в пространстве определяется заданием единицы масштаба для измерения длин и трех пересекающихся в точке взаимно перпендикулярных осей, первая из которых называется осью абсцисс, вторая – осью ординат, третья – осью аппликат; точка‑ начало координат (Рис. 4.4).
Положение координатных осей можно задать с помощью единичных векторов , направленных соответственно по осям. Векторыназываются основными или базисными ортами и определяют базисв трехмерном пространстве.
Пусть
в пространстве дана точка
.
Проектируя ее на ось,
получим точку.
Первой координатойилиабсциссой точки называется длина вектора,
взятая со знаком плюс, еслинаправлен
в ту же сторону, что и вектор,
и со знаком минус ‑ если в противоположную. Аналогично проектируя точкуна осии,
определим ееординату иаппликату
.Тройка чиселвзаимно однозначно соответствует точке.
Аналогично проектируя точкуна осии,
определим ееординату иаппликату
.Тройка чиселвзаимно однозначно соответствует точке.
Система координат называется правой, если вращение от осик осив ближайшую сторону видно с положительного направления осисовершающимися против часовой стрелки, илевой, если вращение от осик осив ближайшую сторону видно совершающимися по часовой стрелке.
Вектор , направленный из начала координат в точкуназываетсярадиус-вектором точки , т.е.:
(4.6) |
Если даны координаты точек и, то координаты вектораполучаются вычитанием из координат его концакоординат начала:или.
Следовательно, по формуле (4.5):
или | (4.7) |
При
сложении (вычитании) векторов их
координаты складываются (вычитаются),
при умножении вектора на число все его
координаты умножаются на это число.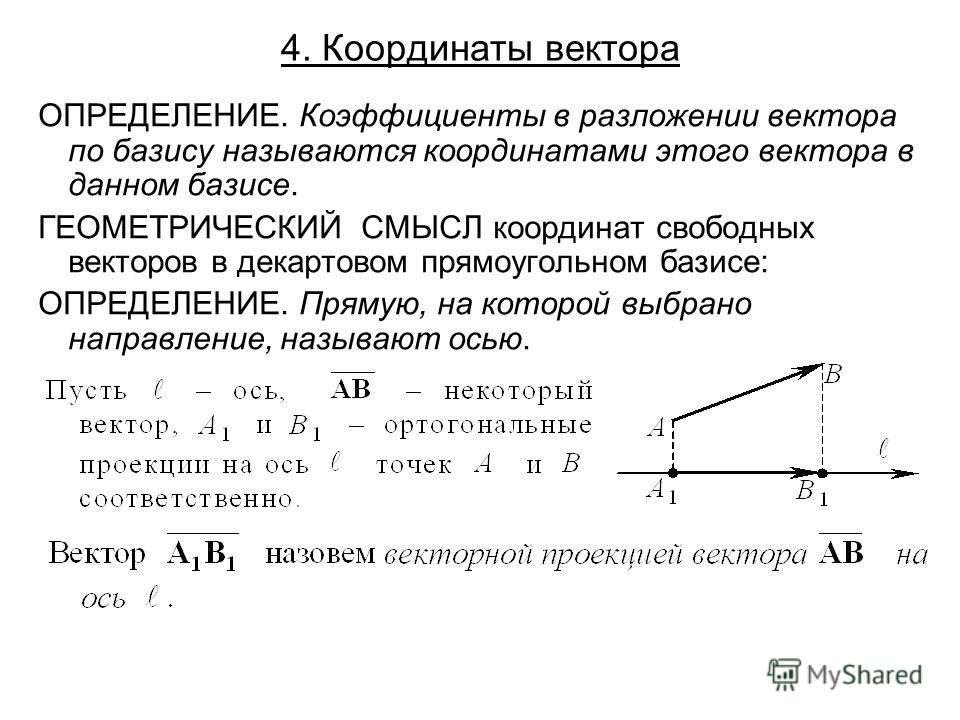
Длина вектора равна квадратному корню из суммы квадратов его координат.
. | (4.8) |
Длина вектора ,заданного координатами своих концов, т.е. расстояние между точками и вычисляется по формуле:
. | (4.9) |
Если иколлинеарны, то они отличаются друг от друга скалярным множителем. Следовательно, у коллинеарных векторов координаты пропорциональны:
. | (4.10) |
Пусть точка делит отрезок между точкамиив отношении, тогда радиус-вектор точкивыражается через радиусы-векторыиего концов по формуле:.
Отсюда получаются координатные формулы:
.
В частности, если точка делит отрезокпополам, тои, т.е..
Переход на новую систему координат — Криста Кинг Математика
Изменение основы с координат xy на другую координатную плоскость
Когда мы впервые научились строить графики, мы определяли точки в пространстве с помощью координат.
Привет! Я Криста.
Я создаю онлайн-курсы, чтобы помочь вам в учебе по математике. Читать далее.
Например, точка ???(3,4)??? сказал нам двигаться ???3??? единиц от начала координат по горизонтали в положительном направлении оси ???x???, и ???4??? единиц по вертикали в положительном направлении оси ???y???.
Мы также научились определять одну и ту же точку с помощью векторов. Вектор ???\vec{v}=(3,4)??? укажет нам на ту же точку ???(3,4)???. Итак, график ???\vec{v}=(3,4)???
А мы знаем, что одно и то же пятно можно представить комбинацией стандартных базисных векторов ???\bold{i}??? и ???\жирный{j}???.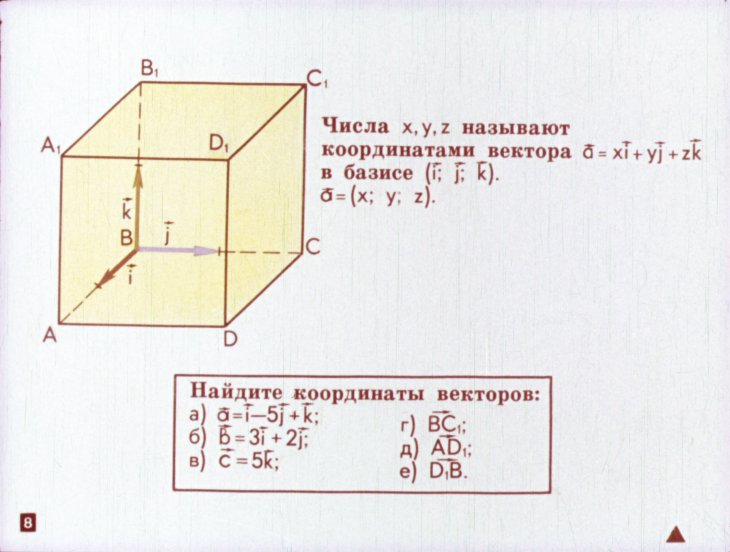 Вектор ???\bold{i}=(1,0)??? вектор, указывающий на ???(1,0)??? и вектор ???\bold{j}=(0,1)??? вектор, указывающий на ???(0,1)???. Итак, мы можем взять ???3??? из ???\жирный{я}??? и ???4??? из ???\жирный{j}??? и снова дойти до той же точки. Итак, график ???3\bold{i}+4\bold{j}???
Вектор ???\bold{i}=(1,0)??? вектор, указывающий на ???(1,0)??? и вектор ???\bold{j}=(0,1)??? вектор, указывающий на ???(0,1)???. Итак, мы можем взять ???3??? из ???\жирный{я}??? и ???4??? из ???\жирный{j}??? и снова дойти до той же точки. Итак, график ???3\bold{i}+4\bold{j}???
Другими словами, до сих пор для построения точек всегда использовались стандартные базисные векторы ???\bold{i}??? и ???\жирный{j}???, или ???\жирный{i}???, ???\жирный{j}???, и ???\жирный{k}??? в трех измерениях. Даже когда мы изначально учились рисовать ???(3,4)??? еще на вводном уроке алгебры, и мы ничего не знали о векторах, мы действительно учились строить ???3\bold{i}+4\bold{j}??? с точки зрения стандартных базисных векторов, мы просто этого еще не знали. 92???, и мы хотим выяснить, как использовать эти векторы для построения той же точки, с которой мы работали, ???(3,4)???.
Во-первых, мы можем отметить новый набор осей. Поймите, что в стандартной базовой системе координат идеально горизонтальная ???x???-ось отмечена с шагом ???\bold{i}???, а идеально вертикальная ???y??? -ось отмечена с шагом ???\bold{j}???.
Теперь мы хотим создать новый набор осей, с одной осью, отмеченной с шагом ???\vec{v}=(2,1)???, а другой осью с шагом ?? ?\vec{w}=(1,3)???. Потому что ???\vec{v}??? и ???\vec{w}??? не являются идеально горизонтальными или вертикальными, оси ???\vec{v}???- и ???\vec{w}???-оси также не будут идеально горизонтальными или вертикальными. Вместо этого ???\vec{v}???-ось будет лежать вдоль ???\vec{v}=(2,1)???, а ???\vec{w}??? -ось будет лежать вдоль ???\vec{w}=(1,3)???.
Набросав новые оси, обратите внимание, как мы разметили их с шагом ???\vec{v}=(2,1)??? и ???\vec{w}=(1,3)???, так что мы можем посчитать, сколько ???\vec{v}???s мы движемся вдоль ???\vec {v}???-ось, и сколько ???\vec{w}???s мы перемещаемся вдоль ???\vec{w}???-оси.
Теперь мы можем набросать сетку, показывающую все «???\vec{v}\vec{w}??? система координат.»
Теперь, чтобы получить ???(3,4)???, мы видим, что нам нужно ???1??? из ???\vec{v}??? и ???1??? из ???\vec{w}???.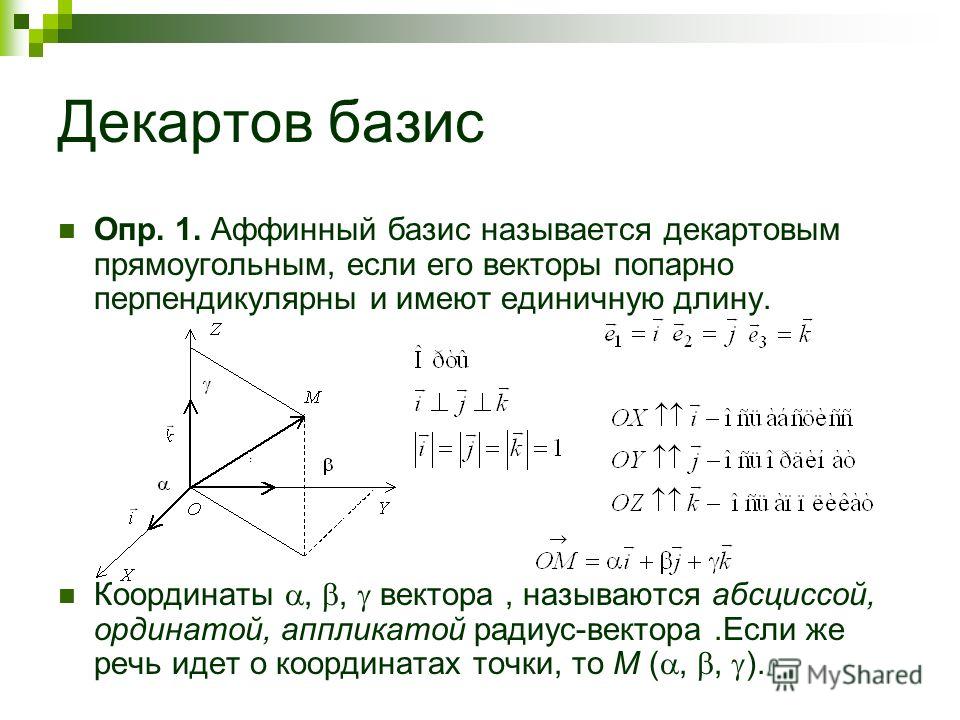 Мы можем выйти на одну единицу ???\vec{v}??? в положительном направлении оси ???\vec{v}???, а затем переместиться на одну единицу ???\vec{w}??? в положительном направлении оси ???\vec{w}???, или мы можем пойти в обратном направлении, сдвинув одну единицу ???\vec{w}??? в положительном направлении оси ???\vec{w}???, а затем на одну единицу ???\vec{v}??? в положительном направлении оси ???\vec{v}???. В любом случае, мы получаем ???(3,4)???.
Мы можем выйти на одну единицу ???\vec{v}??? в положительном направлении оси ???\vec{v}???, а затем переместиться на одну единицу ???\vec{w}??? в положительном направлении оси ???\vec{w}???, или мы можем пойти в обратном направлении, сдвинув одну единицу ???\vec{w}??? в положительном направлении оси ???\vec{w}???, а затем на одну единицу ???\vec{v}??? в положительном направлении оси ???\vec{v}???. В любом случае, мы получаем ???(3,4)???.
Итак, вектор ???\vec{x}\in V??? может быть однозначно выражен как ???\vec{x}=\vec{v}+\vec{w}???, а координатный вектор ???\vec{x}??? в основе ???B???
???[\vec{x}]_B=\begin{bmatrix}1\\ 1\end{bmatrix}???
Изменение базовой матрицы
Итак, теперь, когда мы понимаем концепцию изменения стандартных базовых векторов ???\bold{i}??? и ???\жирный{j}??? к другому набору базисных векторов, например ???\vec{v}??? и ???\vec{w}???, давайте поговорим о том, как мы на самом деле будем это делать.
Если у нас есть векторы, формирующие основу подпространства, то мы можем использовать их для создания матрицы преобразования, называемой матрицей изменения основы, которая изменит вектор из одной основы в другую.
Например, ранее мы изменили ???\bold{i}=(1,0)??? и ???\жирный{j}=(0,1)??? в ???\vec{v}=(2,1)??? и ???\vec{w}=(1,3)???. Допустим, что ???\vec{v}??? и ???\vec{w}??? составляют основу подпространства ???V???, ???B=\{\vec{v},\vec{w}\}???, и некоторого вектора ???\vec{x}? ?? может быть однозначно выражен как ???\vec{x}=c_1\vec{v}+c_2\vec{w}???. Затем
???[\vec{x}]_B=\begin{bmatrix}c_1\\ c_2\end{bmatrix}???
координаты ???\vec{x}??? относительно основания ???B???. Затем мы можем составить уравнение в виде ???A[\vec{x}]_B=\vec{x}???, где ???A??? является матрицей преобразования (изменение базисной матрицы со стандартного базиса на базис ???B???), а ???[\vec{x}]_B??? вектор ???\vec{x}??? представлено в терминах основания ???B???.
Итак, если мы хотим узнать, как вектор ???\vec{x}=(3,4)??? будет представлен новым базисом, заданным ???\vec{v}=(2,1)??? и ???\vec{w}=(1,3)???, то подставляем в уравнение.
???A[\vec{x}]_B=\vec{x}???
Чтобы выяснить, как ???\vec{x}=(3,4)??? будет представлен в ???V???, мы решим расширенную матрицу, заданную этим уравнением.
Это говорит нам о том, что решение уравнения ???[\vec{x}]_B=(1,1)???, или
Другими словами, если мы хотим представить ???\vec{x}=(3,4)??? в терминах стандартных базисных векторов ???\bold{i}=(1,0)??? и ???\bold{j}=(0,1)???, то нам нужно ???3\bold{i}+4\bold{j}???. Но если мы хотим представить ???\vec{x}=(3,4)??? с точки зрения альтернативного базиса ???\vec{v}=(2,1)??? и ???\vec{w}=(1,3)???, то нам нужно ???1\vec{v}+1\vec{w}???, или просто ???\vec{ v}+\vec{w}???. Что соответствует тому, что мы уже нашли ранее, когда рисовали ???(3,4)??? на альтернативной основе.
И наоборот тоже можно преобразовать. Если вы знаете, что вам нужно ???1\vec{v}+1\vec{w}??? добраться до ???(3,4)??? в альтернативной основе вы можете выполнить матричное умножение, чтобы найти правильную комбинацию ???\bold{i}??? и ???\жирный{j}??? на стандартной основе.
???A[\vec{x}]_V=\vec{x}???
???\begin{bmatrix}2(1)+1(1)\\ 1(1)+3(1)\end{bmatrix}=\begin{bmatrix}x_1\\ x_2\end{bmatrix}? ??
???\begin{bmatrix}2+1\\ 1+3\end{bmatrix}=\begin{bmatrix}x_1\\ x_2\end{bmatrix}???
???\begin{bmatrix}3\\ 4\end{bmatrix}=\begin{bmatrix}x_1\\ x_2\end{bmatrix}???
Как создать изменение базовой матрицы для перехода от xy-координат к более удобной основе
Пройти курс
Хотите узнать больше о линейной алгебре? У меня есть пошаговый курс для этого. 🙂
Нахождение комбинации базисных векторов 92???, и дать ???\vec{x}=8\bold{i}-6\bold{j}???.
Вектор ???\vec{x}=(8,-6)??? задается в терминах стандартного базиса, и нам нужно преобразовать его в альтернативный базис, который определяется как ???\vec{v}=(4,-3)??? и ???\vec{w}=(-2,2)???.
Другими словами, мы пытаемся выяснить, как бы мы представляли ???\vec{x}=(8,-6)???, если бы мы делали это в терминах ???\vec{ в}??? и ???\vec{w}???. Итак, давайте подставим полученные значения в матричное уравнение.
???A[\vec{x}]_B=\vec{x}???
Чтобы найти представление ???\vec{x}??? в альтернативном базисе, ???[\vec{x}]_B???, мы будем решать расширенную матрицу.
Это говорит нам, что
???[\vec{x}]_B=\begin{bmatrix}2\\ 0\end{bmatrix}???
Другими словами, нам нужно ???2??? из ???\vec{v}=(4,-3)??? и ???0??? из ???\vec{w}=(-2,2)??? чтобы добраться до ???\vec{x}=(8,-6)???, в альтернативном базисном пространстве, определяемом ???\vec{v}??? и ???\vec{w}???. Итак, если мы хотим набросать этот результат, мы сначала делаем набросок по нашим осям ???\vec{v}???- и ???\vec{w}???-.
Тогда мы выдвигаемся ???2??? ???\vec{v}???-единицы в положительном направлении оси ???\vec{v}???-оси и ???0??? ???\vec{w}???-единицы по оси ???\vec{w}???-(то есть вообще никуда не двигаемся), и приходим к ???\vec {х}=(8,-6)???.
Если у нас есть векторы, формирующие основу подпространства, то мы можем использовать их для создания матрицы преобразования, называемой матрицей замены основы, которая изменит вектор из одной основы в другую. 9{-1}\vec{x}???
???[\vec{x}]_B=\begin{bmatrix}1(8)+1(-6)\\ \frac32(8)+2(-6)\end{bmatrix}???
???[\vec{x}]_B=\begin{bmatrix}8-6\\ 12-12\end{bmatrix}???
???[\vec{x}]_B=\begin{bmatrix}2\\ 0\end{bmatrix}???
Это подтверждает результат, который мы нашли ранее.
Получить доступ к полному курсу линейной алгебры
Учим математикуКриста Кинг математика, учиться онлайн, онлайн-курс, математика онлайн, линейная алгебра, координатный базис, координаты в новом базисе, стандартные базисные векторы, альтернативный базис, альтернативный координатный базис, изменение базиса, изменение базиса, изменение базовая матрица
0 лайковОснования как системы координат
Цели
- Научитесь рассматривать базис как систему координат в подпространстве.

- Рецепты: вычислить B-координаты вектора, вычислить обычные координаты вектора по его B-координатам.
- Изображение: B-координаты вектора, использующие его расположение на нестандартной координатной сетке.
- Словарное слово: B-координаты .
В этом разделе мы интерпретируем базис подпространства V как систему координат на V и узнаем, как записать вектор в V в этой системе координат.
Факт
Если B={v1,v2,…,vm} является базисом подпространства V, то любой вектор x в V можно записать в виде линейной комбинации
х=c1v1+c2v2+···+cmvm
ровно одним способом.
Пример
Рассмотрим стандартный базис R3 из этого примера в Разделе 2.7:
e1=E100F,e2=E010F,e3=E001F.
В соответствии с приведенным выше фактом каждый вектор в R3 может быть записан как линейная комбинация e1,e2,e3 с уникальными коэффициентами. Например,
v=E35-2F=3E100F+5E010F-2E001F=3e1+5e2-2e3.
В этом случае координаты v точно совпадают с коэффициентами e1,e2,e3.
Что такое координаты? Один из способов представить координаты состоит в том, что они указывают, как добраться до определенной точки от начала координат. В приведенном выше примере линейную комбинацию 3e1+5e2−2e3 можно рассматривать как следующий список инструкций: начать с исходной точки, пройти 3 единицы на север, затем пройти 5 единиц на восток, затем 2 единицы вниз.
Определение
Пусть B={v1,v2,…,vm} базис подпространства V, и пусть
х=c1v1+c2v2+···+cmvm
— вектор в V. Коэффициенты c1,c2,…,cm — это координаты x относительно B . Вектор B-координат x является вектором
[x]B=GKKIc1c2…cmHLLJinRm.
Если мы изменим базис, то мы все еще можем дать инструкции, как добраться до точки (3,5,−2), но инструкции будут другими. Скажем например берем за основу
v1=e1+e2=E110F,v2=e2=E010F,v3=e3=E001F.
Мы можем записать (3,5,−2) в этом базисе как 3v1+2v2−2v3. Другими словами: начните с исходной точки, пройдите на северо-восток 3 раза до v1, затем на 2 единицы на восток, затем на 2 единицы вниз. В этой ситуации мы можем сказать, что «3 — это координата v1 точки (3,5,−2), 2 — координата v2 точки (3,5,−2), а −2 — координата v3 точки (3,5,−2)».
Другими словами: начните с исходной точки, пройдите на северо-восток 3 раза до v1, затем на 2 единицы на восток, затем на 2 единицы вниз. В этой ситуации мы можем сказать, что «3 — это координата v1 точки (3,5,−2), 2 — координата v2 точки (3,5,−2), а −2 — координата v3 точки (3,5,−2)».
Приведенное выше определение позволяет использовать Rm для маркировки точек подпространства размерности m: точка просто помечается ее вектором B-координат. Например, если мы выбираем основу для плоскости, мы можем пометить точки этой плоскости точками R2.
Пример(Нестандартная система координат на R2)
Пример
Пусть
v1=E2-11Fv2=E10-1F.
Они образуют базис B для плоскости V=Span{v1,v2} в R3. Мы указываем систему координат, определяемую B, рисуя линии, параллельные «осям v1» и «осьм v2»:
u1u2u3u4v1v2VИз рисунка видно, что координата v1 элемента u1 равна 1, как и координата v2, поэтому [u1]B=A11B. Точно так же у нас есть
[u2]B=M−112N[u3]B=C32−12D[u4]B=M032N.