Однородная слау. Однородные системы уравнений
Мы продолжим шлифовать технику элементарных преобразований на однородной системе линейных уравнений .
По первым абзацам материал может показаться скучным и заурядным, однако данное впечатление обманчиво. Помимо дальнейшей отработки технических приёмов будет много новой информации, поэтому, пожалуйста, постарайтесь не пренебрегать примерами данной статьи.
Ответ напрашивается сам собой. Система линейных уравнений является однородной, если свободный член каждого уравнения системы равен нулю. Например:
Совершенно ясно, что однородная система всегда совместна , то есть всегда имеет решение. И, прежде всего, в глаза бросается так называемое тривиальное решение . Тривиальное, для тех, кто совсем не понял смысл прилагательного, значит, беспонтовое. Не академично, конечно, но зато доходчиво =) …Чего ходить вокруг да около, давайте выясним, нет ли у данной системы каких-нибудь других решений:
Пример 1
Решение : чтобы решить однородную систему необходимо записать матрицу системы и с помощью элементарных преобразований привести её к ступенчатому виду. Обратите внимание, что здесь отпадает необходимость записывать вертикальную черту и нулевой столбец свободных членов – ведь что ни делай с нулями, они так и останутся нулями:
Обратите внимание, что здесь отпадает необходимость записывать вертикальную черту и нулевой столбец свободных членов – ведь что ни делай с нулями, они так и останутся нулями:
(1) Ко второй строке прибавили первую строку, умноженную на –2. К третьей строке прибавили первую строку, умноженную на –3.
(2) К третьей строке прибавили вторую строку, умноженную на –1.
Делить третью строку на 3 не имеет особого смысла.
В результате элементарных преобразований получена эквивалентная однородная система , и, применяя обратный ход метода Гаусса, легко убедиться, что решение единственно.
Ответ :
Сформулируем очевидный критерий : однородная система линейных уравнений имеет только тривиальное решение , если ранг матрицы системы (в данном случае 3) равен количеству переменных (в данном случае – 3 шт.).
Разогреваемся и настраиваем свой радиоприёмник на волну элементарных преобразований:
Пример 2
Решить однородную систему линейных уравнений
Чтобы окончательно закрепить алгоритм, разберём финальное задание:
Пример 7
Решить однородную систему, ответ записать в векторной форме.
Решение : запишем матрицу системы и с помощью элементарных преобразований приведём её к ступенчатому виду:
(1) У первой строки сменили знак. Ещё раз заостряю внимание на неоднократно встречавшемся приёме, который позволяет существенно упростить следующее действие.
(1) Ко 2-й и 3-й строкам прибавили первую строку. К 4-й строке прибавили первую строку, умноженную на 2.
(3) Последние три строки пропорциональны, две из них удалили.
В результате получена стандартная ступенчатая матрица, и решение продолжается по накатанной колее:
– базисные переменные;
– свободные переменные.
Выразим базисные переменные через свободные переменные. Из 2-го уравнения:
– подставим в 1-е уравнение:
Таким образом, общее решение:
Поскольку в рассматриваемом примере три свободные переменные, то фундаментальная система содержит три вектора.
Подставим тройку значений в общее решение и получим вектор , координаты которого удовлетворяют каждому уравнению однородной системы. И снова повторюсь, что крайне желательно проверять каждый полученный вектор – времени займет не так много, а от ошибок убережёт стопроцентно.
И снова повторюсь, что крайне желательно проверять каждый полученный вектор – времени займет не так много, а от ошибок убережёт стопроцентно.
Для тройки значений находим вектор
И, наконец, для тройки получаем третий вектор:
Ответ : , где
Желающие избежать дробных значений могут рассмотреть тройки и получить ответ в эквивалентном виде:
К слову о дробях. Посмотрим на полученную в задаче матрицу и зададимся вопросом – нельзя ли упростить дальнейшее решение? Ведь здесь мы сначала выразили через дроби базисную переменную , потом через дроби базисную переменную , и, надо сказать, процесс это был не самый простой и не самый приятный.
Второй вариант решения :
Идея состоит в том, чтобы попытаться выбрать другие базисные переменные . Посмотрим на матрицу и заметим две единицы в третьем столбце. Так почему бы не получить ноль вверху? Проведём ещё одно элементарное преобразование:
Системы линейных однородных уравнений — имеет вид ∑a k i x i = 0.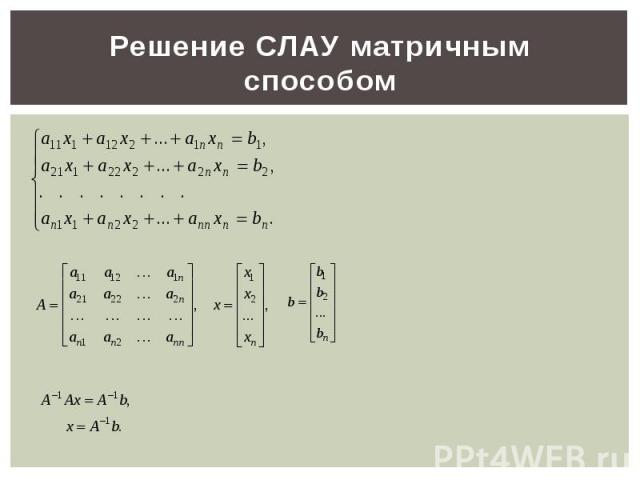 где m > n или m Однородная система линейных уравнений всегда совместна, так как rangA = rangB . Она заведомо имеет решение, состоящее из нулей, которое называется
где m > n или m Однородная система линейных уравнений всегда совместна, так как rangA = rangB . Она заведомо имеет решение, состоящее из нулей, которое называется
Назначение сервиса . Онлайн-калькулятор предназначен для нахождения нетривиального и фундаментального решения СЛАУ. Полученное решение сохраняется в файле Word (см. пример решения).
Инструкция . Выберите размерность матрицы:
Свойства систем линейных однородных уравнений
Для того чтобы система имела нетривиальные решения , необходимо и достаточно, чтобы ранг ее матрицы был меньше числа неизвестных.
Теорема . Система в случае m=n имеет нетривиальное решение тогда и только тогда, когда определитель этой системы равен нулю.
Теорема . Любая линейная комбинация решений системы также является решением этой системы.
Определение . Совокупность решений системы линейных однородных уравнений называется фундаментальной системой решений , если эта совокупность состоит из линейно независимых решений и любое решение системы является линейной комбинацией этих решений.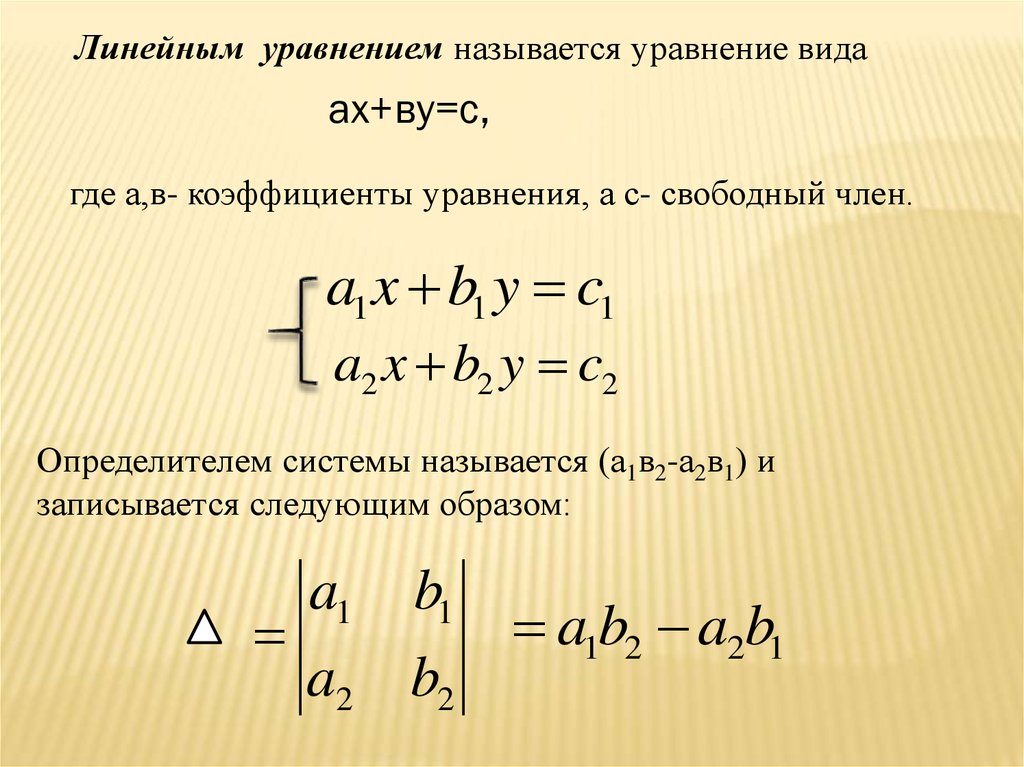
Теорема. Если ранг r матрицы системы меньше числа n неизвестных, то существует фундаментальная система решений, состоящая из (n-r) решений.
Алгоритм решения систем линейных однородных уравнений
- Находим ранг матрицы.
- Выделяем базисный минор. Выделяем зависимые (базисные) и свободные неизвестные.
- Вычеркиваем те уравнения системы, коэффициенты которых не вошли в состав базисного минора, так как они являются следствиями остальных (по теореме о базисном миноре).
- Члены уравнений, содержащие свободные неизвестные, перенесем в правую часть. В результате получим систему из r уравнений с r неизвестными, эквивалентную данной, определитель которой отличен от нуля.
- Решаем полученную систему методом исключения неизвестных. Находим соотношения, выражающие зависимые переменные через свободные.
- Если ранг матрицы не равен количеству переменных, то находим фундаментальное решение системы.
- В случае rang = n имеем тривиальное решение.

Пример
. Найти базис системы векторов (а 1 , а 2 ,…,а m), ранг и выразить векторы по базе. Если а 1 =(0,0,1,-1), а 2 =(1,1,2,0), а 3 =(1,1,1,1), а 4 =(3,2,1,4), а 5 =(2,1,0,3).
Выпишем основную матрицу системы:
Умножим 3-ую строку на (-3). Добавим 4-ую строку к 3-ой:
| 0 | 0 | 1 | -1 |
| 0 | 0 | -1 | 1 |
| 0 | -1 | -2 | 1 |
| 3 | 2 | 1 | 4 |
| 2 | 1 | 0 | 3 |
Умножим 4-ую строку на (-2). Умножим 5-ую строку на (3). Добавим 5-ую строку к 4-ой:
Найдем ранг матрицы.
Система с коэффициентами этой матрицы эквивалентна исходной системе и имеет вид:
— x 3 = — x 4
— x 2 — 2x 3 = — x 4
2x 1 + x 2 = — 3x 4
Методом исключения неизвестных находим нетривиальное решение:
Получили соотношения, выражающие зависимые переменные x 1 ,x 2 ,x 3 через свободные x 4 , то есть нашли общее решение:
x 3 = x 4
x 2 = — x 4
x 1 = — x 4
Однородные системы линейных алгебраических уравнений
В рамках уроков метод Гаусса и Несовместные системы/системы с общим решением мы рассматривали неоднородные системы линейных уравнений , где свободный член (который обычно находится справа) хотя бы одного из уравнений был отличен от нуля.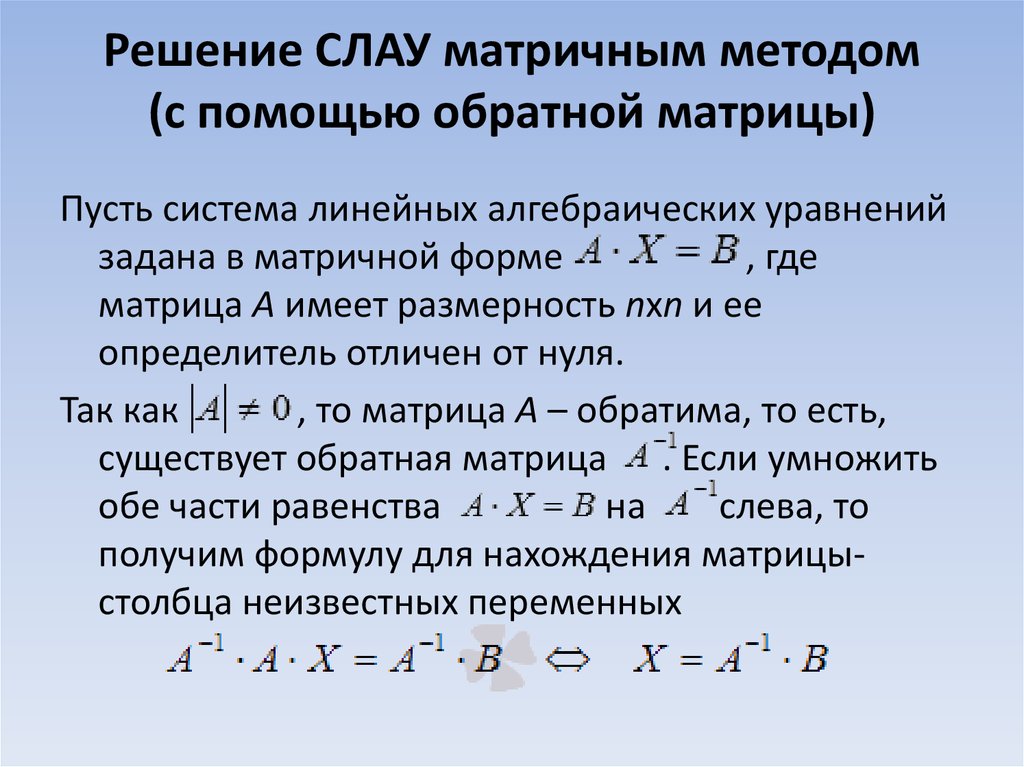
И сейчас, после хорошей разминки с рангом матрицы
По первым абзацам материал может показаться скучным и заурядным, однако данное впечатление обманчиво. Помимо дальнейшей отработки технических приёмов будет много новой информации, поэтому, пожалуйста, постарайтесь не пренебрегать примерами данной статьи.
Что такое однородная система линейных уравнений?
Ответ напрашивается сам собой. Система линейных уравнений является однородной, если свободный член каждого уравнения системы равен нулю. Например:
Совершенно ясно, что однородная система всегда совместна , то есть всегда имеет решение. И, прежде всего, в глаза бросается так называемое тривиальное решение . Тривиальное, для тех, кто совсем не понял смысл прилагательного, значит, беспонтовое. Не академично, конечно, но зато доходчиво =) …Чего ходить вокруг да около, давайте выясним, нет ли у данной системы каких-нибудь других решений:
Пример 1
Решение : чтобы решить однородную систему необходимо записать матрицу системы и с помощью элементарных преобразований привести её к ступенчатому виду.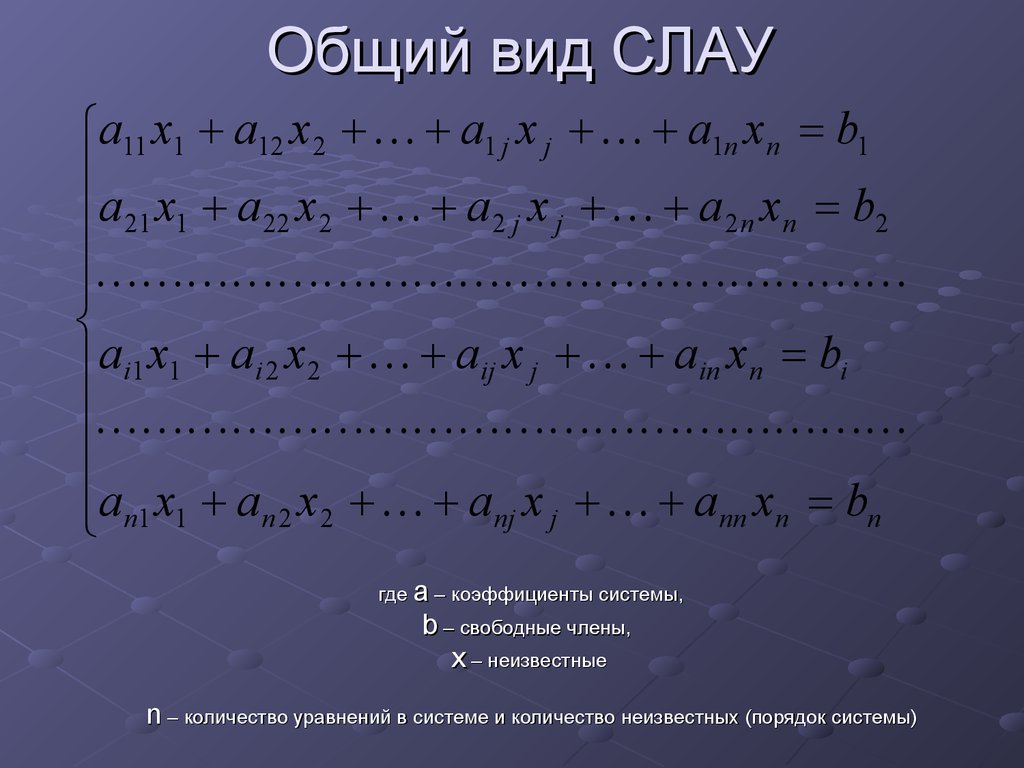 Обратите внимание, что здесь отпадает необходимость записывать вертикальную черту и нулевой столбец свободных членов – ведь что ни делай с нулями, они так и останутся нулями:
Обратите внимание, что здесь отпадает необходимость записывать вертикальную черту и нулевой столбец свободных членов – ведь что ни делай с нулями, они так и останутся нулями:
(1) Ко второй строке прибавили первую строку, умноженную на –2. К третьей строке прибавили первую строку, умноженную на –3.
(2) К третьей строке прибавили вторую строку, умноженную на –1.
Делить третью строку на 3 не имеет особого смысла.
В результате элементарных преобразований получена эквивалентная однородная система , и, применяя обратный ход метода Гаусса, легко убедиться, что решение единственно.
Ответ :
Сформулируем очевидный критерий
Разогреваемся и настраиваем свой радиоприёмник на волну элементарных преобразований:
Пример 2
Решить однородную систему линейных уравнений
Из статьи Как найти ранг матрицы? вспоминаем рациональный приём попутного уменьшения чисел матрицы.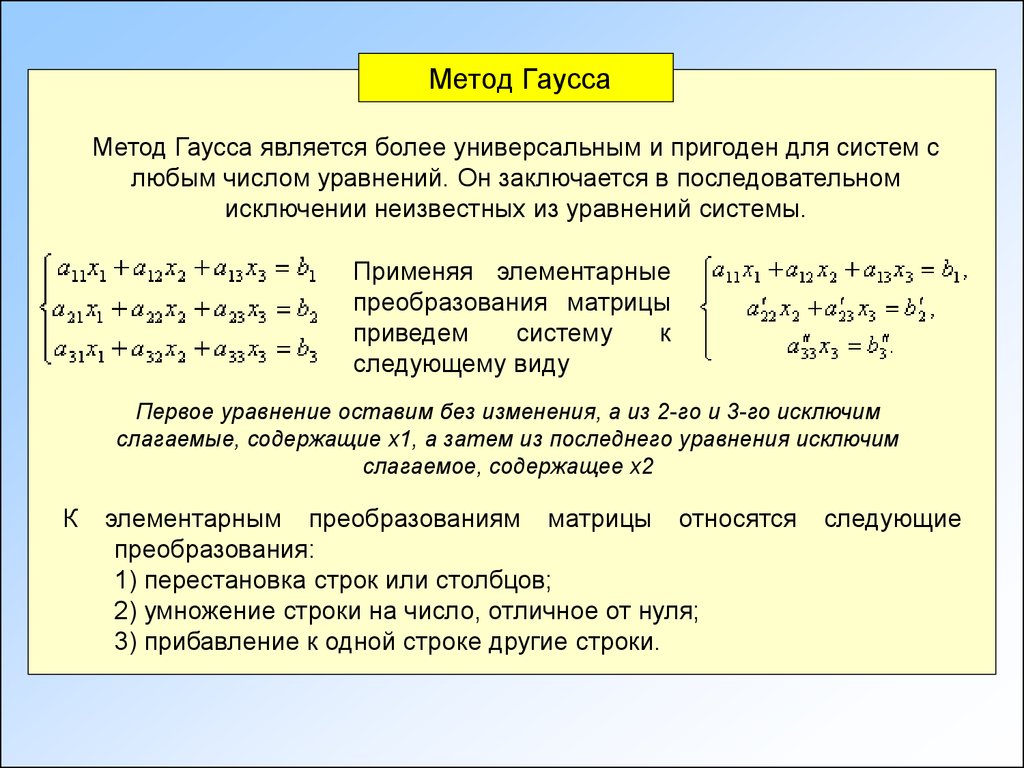 В противном случае вам придётся разделывать крупную, а частенько и кусачую рыбу. Примерный образец оформления задания в конце урока.
В противном случае вам придётся разделывать крупную, а частенько и кусачую рыбу. Примерный образец оформления задания в конце урока.
Нули – это хорошо и удобно, однако на практике гораздо более распространен случай, когда строки матрицы системы линейно зависимы . И тогда неизбежно появление общего решения:
Пример 3
Решить однородную систему линейных уравнений
Решение : запишем матрицу системы и с помощью элементарных преобразований приведём её к ступенчатому виду. Первое действие направлено не только на получение единичного значения, но и на уменьшение чисел в первом столбце:
(1) К первой строке прибавили третью строку, умноженную на –1. Ко второй строке прибавили третью строку, умноженную на –2. Слева вверху я получил единицу с «минусом», что зачастую намного удобнее для дальнейших преобразований.
(2) Первые две строки одинаковы, одну из них удалили. Честное слово, не подгонял решение – так получилось. Если выполнять преобразования шаблонно, то линейная зависимость строк обнаружилась бы чуть позже.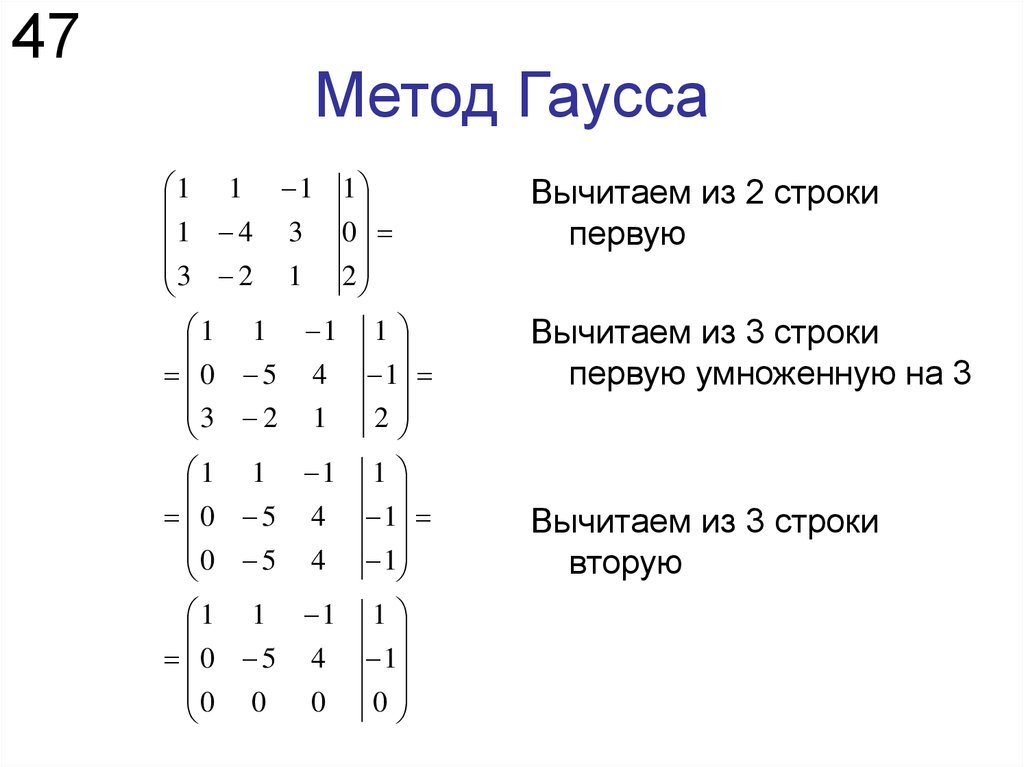
(3) К третьей строке прибавили вторую строку, умноженную на 3.
(4) У первой строки сменили знак.
В результате элементарных преобразований получена эквивалентная система:
Алгоритм работает точно так же, как и для неоднородных систем . Переменные , «сидящие на ступеньках» – главные, переменная , которой не досталось «ступеньки» – свободная.
Выразим базисные переменные через свободную переменную:
Ответ : общее решение:
Тривиальное решение входит в общую формулу, и записывать его отдельно излишне.
Проверка выполняется тоже по обычной схеме: полученное общее решение необходимо подставить в левую часть каждого уравнения системы и получить законный ноль при всех подстановках.
На этом можно было бы тихо-мирно закончить, но решение однородной системы уравнений часто требуется представить в векторной форме с помощьюфундаментальной системы решений . Пожалуйста, временно забудьте обаналитической геометрии , поскольку сейчас речь пойдёт о векторах в общем алгебраическом смысле, который я немного приоткрыл в статье про ранг матрицы .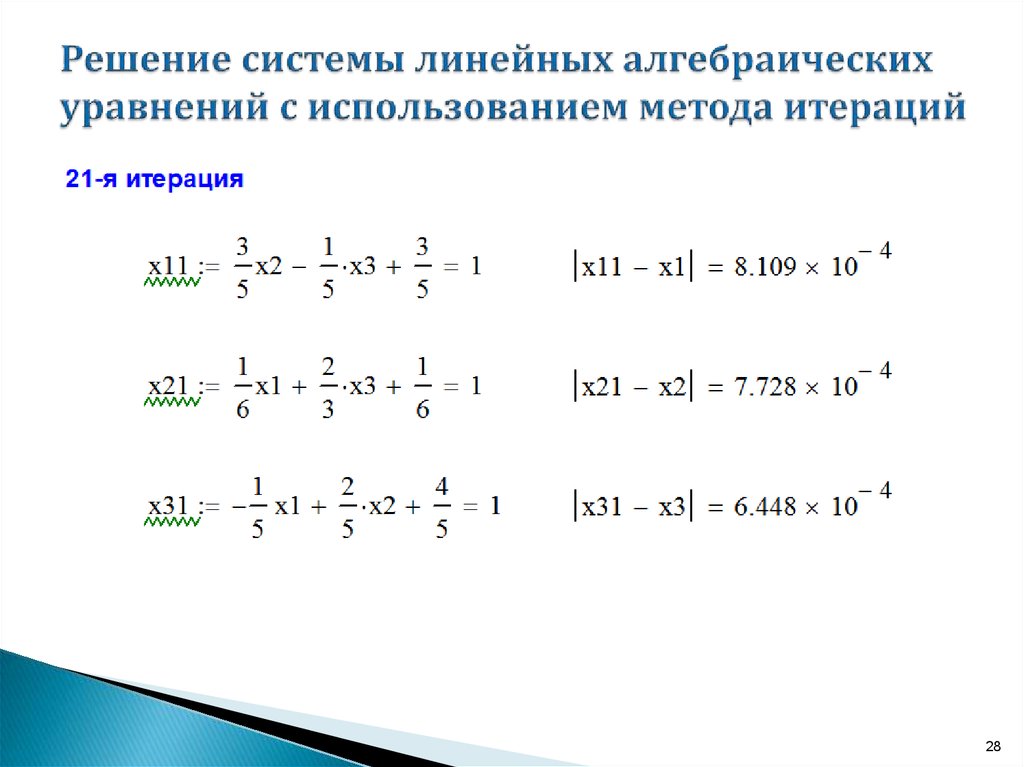 Терминологии тушеваться не нужно, всё довольно просто.
Терминологии тушеваться не нужно, всё довольно просто.
Однородная система линейных уравнений AX = 0 всегда совместна. Она имеет нетривиальные (ненулевые) решения, если r = rank A .
Для однородных систем базисные переменные (коэффициенты при которых образуют базисный минор) выражаются через свободные переменные соотношениями вида:
Тогда n — r линейно независимыми вектор-решениями будут:
а любое другое решение является их линейной комбинацией. Вектор-решения образуют нормированную фундаментальную систему.
В линейном пространстве множество решений однородной системы линейных уравнений образует подпространство размерности n — r ; — базис этого подпространства.
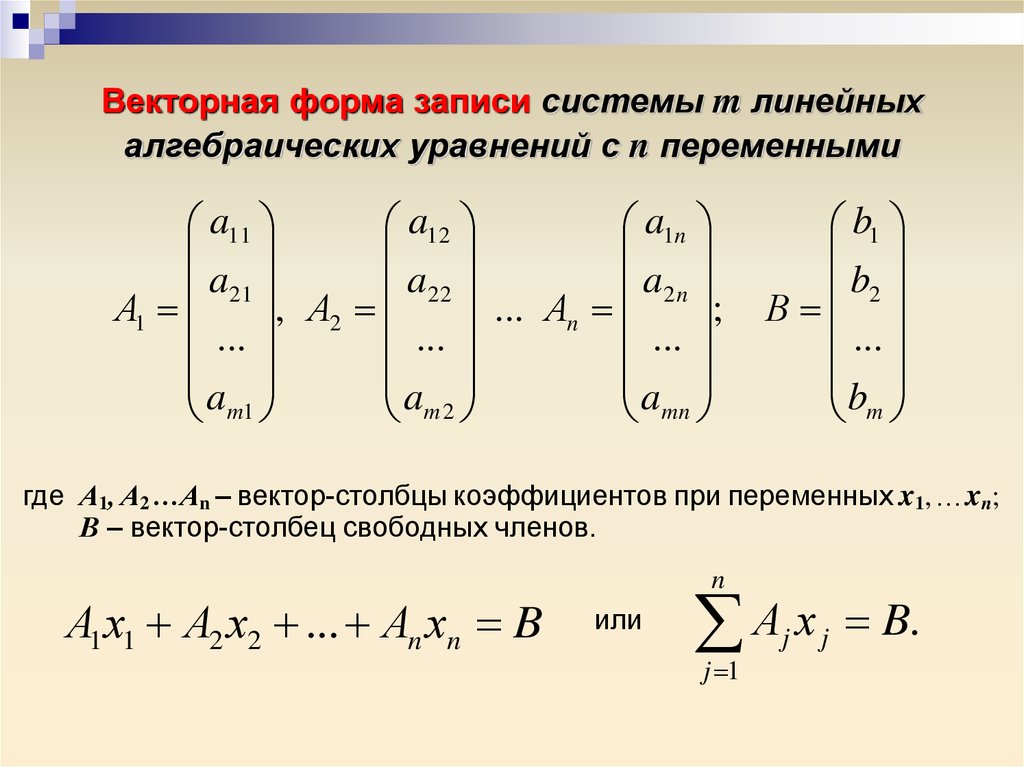
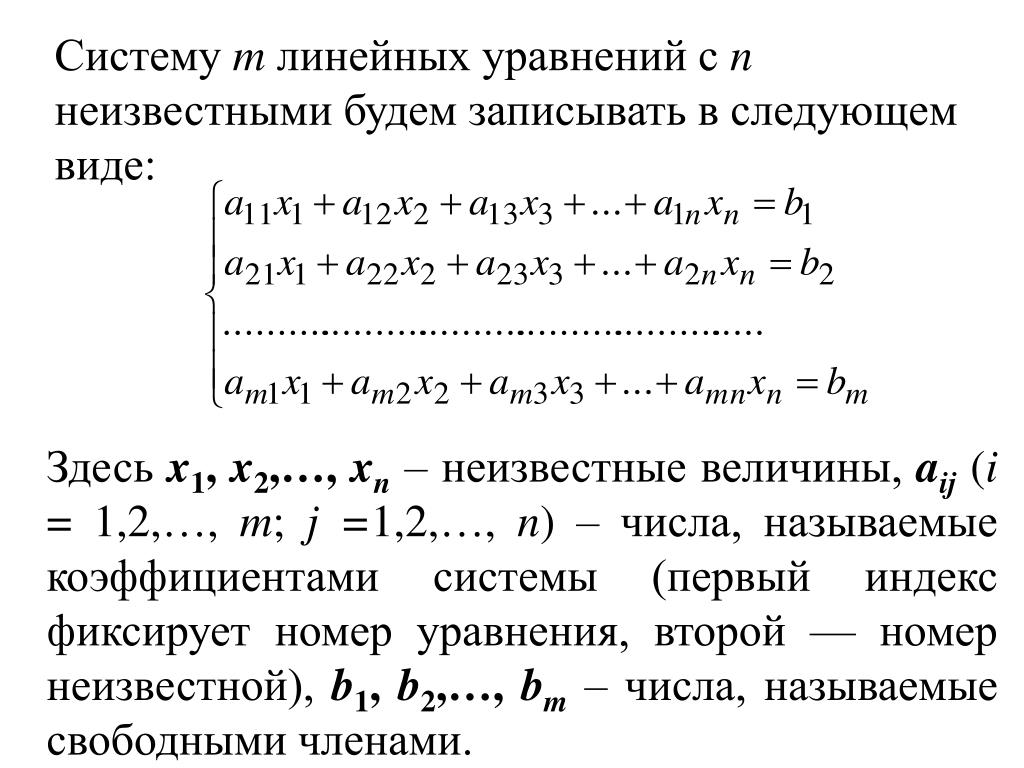
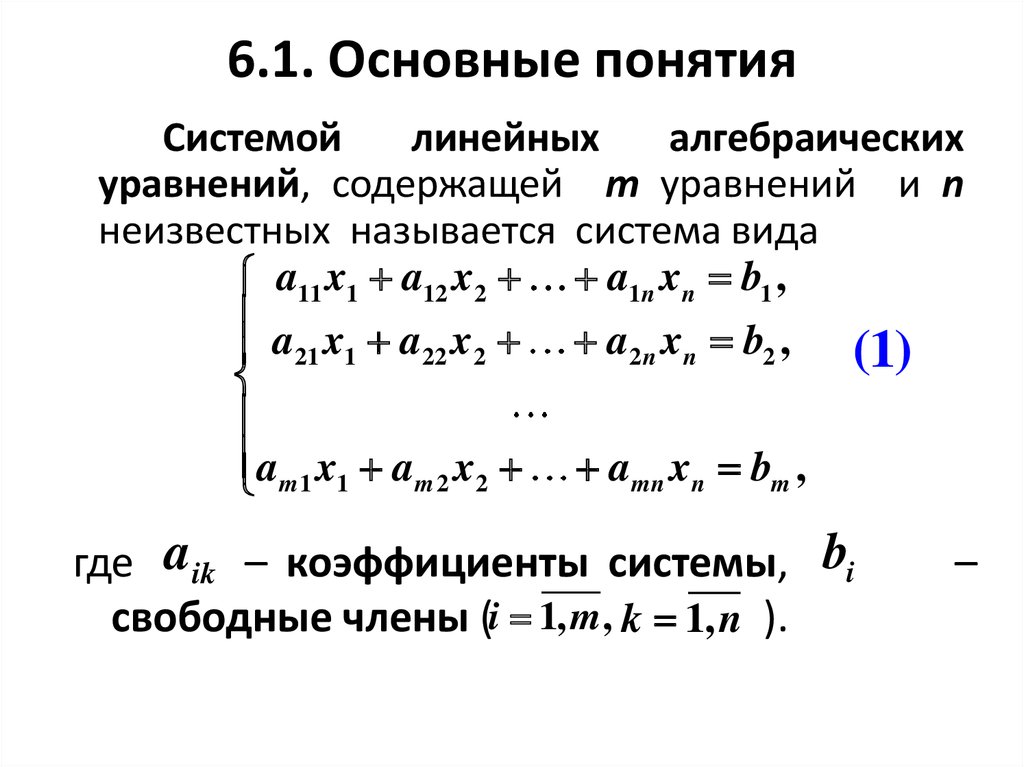
Система m линейных уравнений с n неизвестными (или, линейная система
Здесь x 1 , x 2 , …, x n a 11 , a 12 , …, a mn — коэффициенты системы — иb 1 , b 2 , … b m a ij i ) и неизвестного (j
Система (1) называется однородной b 1 = b 2 = … = b m = 0), иначе —неоднородной .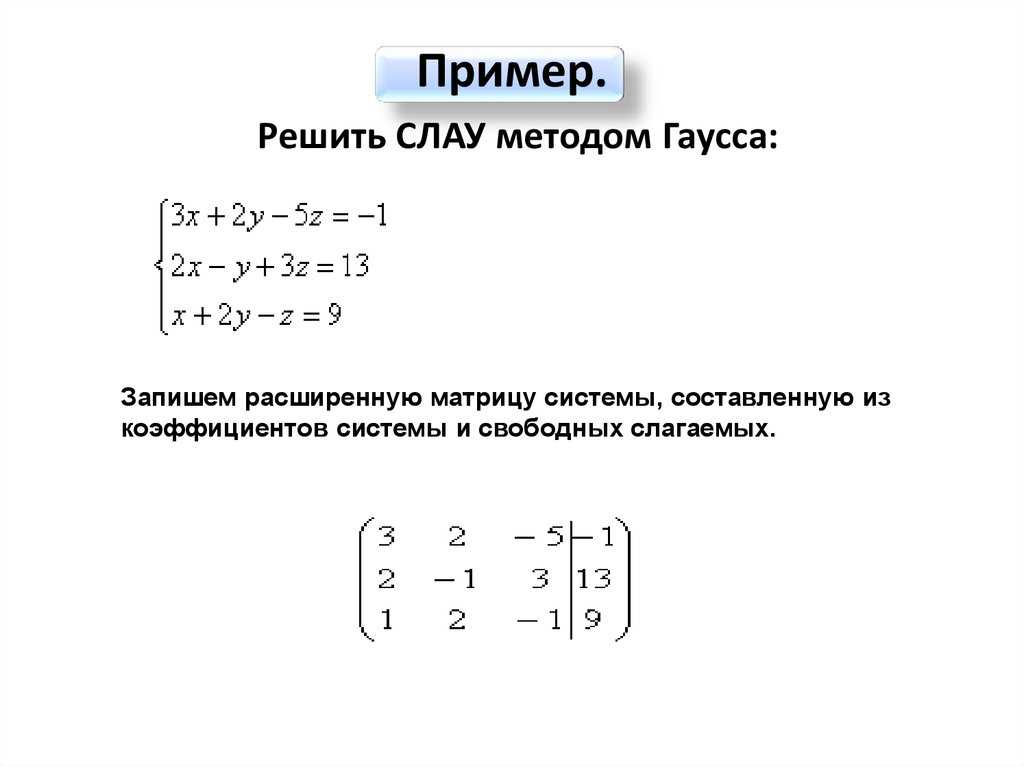
Система (1) называется квадратной , если число m уравнений равно числу n неизвестных.
Решение системы (1) — совокупность n чисел c 1 , c 2 , …, c n , таких что подстановка каждого c i вместо x i в систему (1) обращает все её уравнения в тождества.
Система (1) называется совместной несовместной
Решения c 1 (1) , c 2 (1) , …, c n (1) и c 1 (2) , c 2 (2) , …, c n различными
| c 1 (1) = c 1 (2) , c 2 (1) = c 2 (2) , …, c n (1) = c n (2) . |
определённой неопределённой . Если уравнений больше, чем неизвестных, она называется переопределённой .
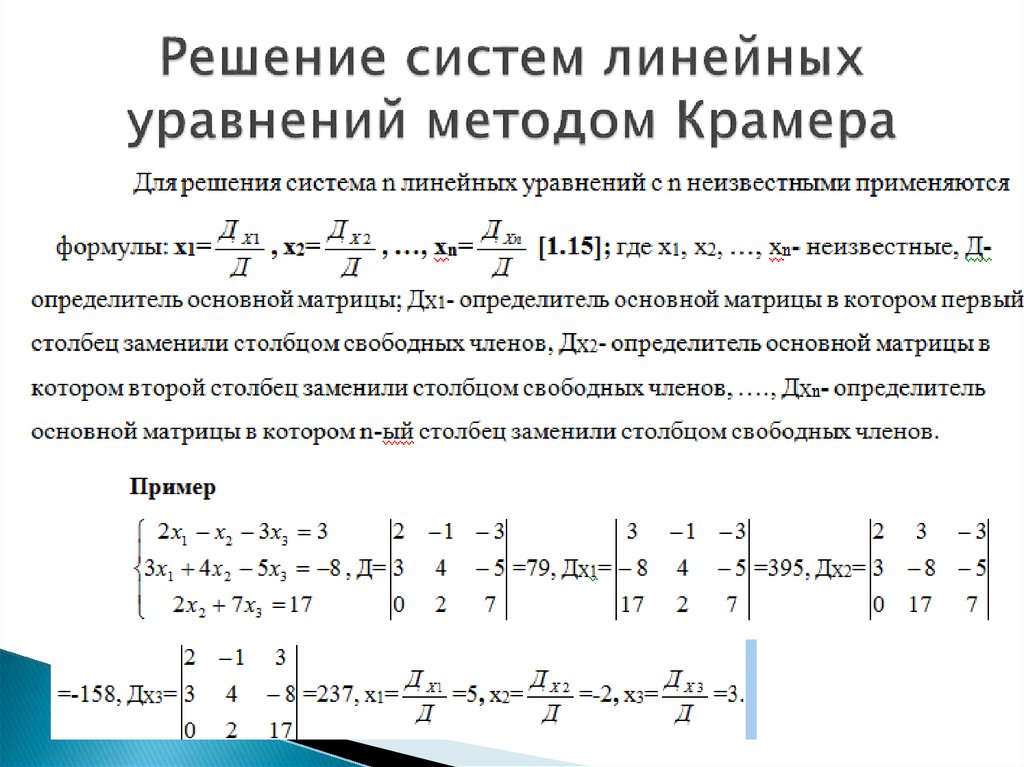
Решение систем линейных уравнений
Решение матричных уравнений ~ Метод Гаусса
Способы решения систем линейных уравнений делятся на две группы:
1. точные методы , представляющие собой конечные алгоритмы для вычисления корней системы (решение систем с помощью обратной матрицы, правило Крамера, метод Гаусса и др.),
точные методы , представляющие собой конечные алгоритмы для вычисления корней системы (решение систем с помощью обратной матрицы, правило Крамера, метод Гаусса и др.),
2. итерационные методы , позволяющие получить решение системы с заданной точностью путем сходящихся итерационных процессов (метод итерации, метод Зейделя и др.).
Вследствие неизбежных округлений результаты даже точных методов являются приближенными. При использовании итерационных методов, сверх того, добавляется погрешность метода.
Эффективное применение итерационных методов существенно зависит от удачного выбора начального приближения и быстроты сходимости процесса.
Решение матричных уравнений
Рассмотрим систему n линейных алгебраических уравнений относительно n неизвестных х 1 , х 2 , …, х n :
| . | (15) |
Матрица А , столбцами которой являются коэффициенты при соответствующих неизвестных, а строками — коэффициенты при неизвестных в соответствующем уравнении, называется матрицей системы ; матрица-столбец b , элементами которой являются правые части уравнений системы, называется матрицей правой части или просто правой частью системы .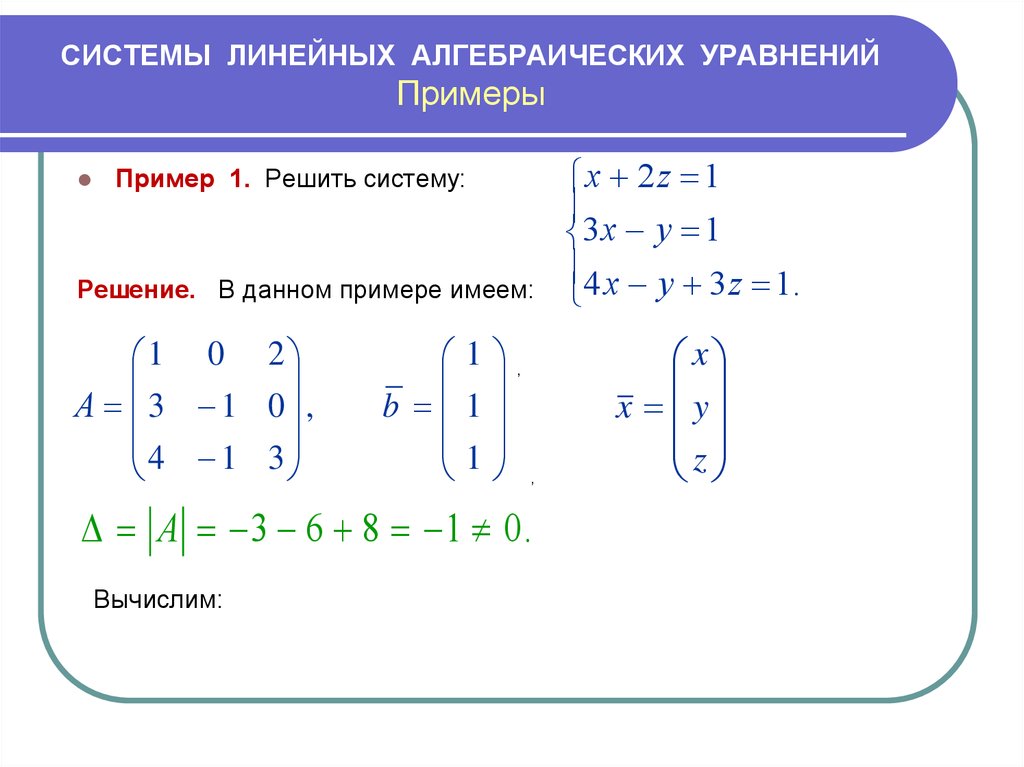 Матрица-столбец х , элементы которой — искомые неизвестные, называется решением системы .
Матрица-столбец х , элементы которой — искомые неизвестные, называется решением системы .
Если матрица А — неособенная, то есть det A н е равен 0 то система (13), или эквивалентное ей матричное уравнение (14), имеет единственное решение.
В самом деле, при условии det A не равно 0 существует обратная матрица А -1 . Умножая обе части уравнения (14) на матрицу А -1 получим:
Формула (16) дает решение уравнения (14) и оно единственно.
Системы линейных уравнений удобно решать с помощью функции lsolve .
lsolve(А, b )
Возвращается вектор решения x такой, что Ах = b.
Аргументы:
А — квадратная, не сингулярная матрица.
b — вектор, имеющий столько же рядов, сколько рядов в матрице А .
На Рисунке 8 показано решение системы трех линейных уравнений относительно трех неизвестных.
Метод Гаусса
Метод Гаусса, его еще называют методом Гауссовых исключений, состоит в том, что систему (13) приводят последовательным исключением неизвестных к эквивалентной системе с треугольной матрицей:
В матричной записи это означает, что сначала (прямой ход метода Гаусса) элементарными операциями над строками приводят расширенную матрицу системы к ступенчатому виду:
а затем (обратный ход метода Гаусса) эту ступенчатую матрицу преобразуют так, чтобы в первых n столбцах получилась единичная матрица:
.
Последний, (n + 1) столбец этой матрицы содержит решение системы (13).
В Mathcad прямой и обратный ходы метода Гаусса выполняет функция rref (A ).
На Рисунке 9 показано решение системы линейных уравнений методом Гаусса, в котором используются следующие функции:
rref(A )
Возвращается ступенчатая форма матрицы А .
augment(A , В )
Возвращается массив, сформированный расположением A иВ бок о бок. Массивы A иВ должны иметь одинаковое число строк.
submatrix(A, ir, jr, ic, jc )
Возвращается субматрица, состоящая из всех элементов с ir по jr и столбцах с ic по jc. Удостоверьтесь, что ir jr и
ic jc, иначе порядок строк и (или) столбцов будет обращен.
Рисунок 9.
Описание метода
Для системы n линейных уравнений с n неизвестными (над произвольным полем)
с определителем матрицы системы Δ, отличным от нуля, решение записывается в виде
(i-ый столбец матрицы системы заменяется столбцом свободных членов).
В другой форме правило Крамера формулируется так: для любых коэффициентов c1, c2, …, cn справедливо равенство:
В этой форме формула Крамера справедлива без предположения, что Δ отлично от нуля, не нужно даже, чтобы коэффициенты системы были бы элементами целостного кольца(определитель системы может быть даже делителем нуля в кольце коэффициентов). Можно также считать, что либо наборы b1,b2,…,bn и x1,x2,…,xn, либо набор c1,c2,…,cn состоят не из элементов кольца коэффициентов системы, а какого-нибудь модуля над этим кольцом. В этом виде формула Крамера используется, например, при доказательстве формулы дляопределителя Грама и Леммы Накаямы.
| 35) Теорема Кронекера-Капелли |
Для того чтобы система m неоднородных линейных уравнений с n неизвестными была совместной, необходимо и достаточно, чтобы
Доказательство необходимости.
Пусть система (1.13) совместна, то есть существуют такие числа х 1 =α 1 , х 2 =α 2 , …, х n =α n , что
(1. 15)
Вычтем из последнего столбца расширенной матрицы ее первый столбец, умноженный на α 1 , второй – на α 2 , …, n-ый – умноженный на α n , то есть из последнего столбца матрицы (1.14) следует вычесть левые части равенств (1.15). Тогда получим матрицу
ранг которой в результате элементарных преобразований не изменится и . Но очевидно, и, значит,
Доказательство достаточности.
Пусть и пусть для определенности не равный нулю минор порядка r расположен в левом верхнем углу матрицы:
Это означает, что остальные строки матрицы могут быть получены как линейные комбинации первых r строк, то есть m-r строк матрицы можно представить в виде сумм первых r строк, умноженных на некоторые числа. Но тогда первые r уравнений системы (1.13) самостоятельны, а остальные являются их следствиями, то есть решение системы первых r уравнений автоматически является решением остальных уравнений.
Возможны два случая.
1. r=n. Тогда система, состоящая из первых r уравнений, имеет одинаковое число уравнений и неизвестных и совместна, причем решение ее единственно. 15)
Вычтем из последнего столбца расширенной матрицы ее первый столбец, умноженный на α 1 , второй – на α 2 , …, n-ый – умноженный на α n , то есть из последнего столбца матрицы (1.14) следует вычесть левые части равенств (1.15). Тогда получим матрицу
ранг которой в результате элементарных преобразований не изменится и . Но очевидно, и, значит,
Доказательство достаточности.
Пусть и пусть для определенности не равный нулю минор порядка r расположен в левом верхнем углу матрицы:
Это означает, что остальные строки матрицы могут быть получены как линейные комбинации первых r строк, то есть m-r строк матрицы можно представить в виде сумм первых r строк, умноженных на некоторые числа. Но тогда первые r уравнений системы (1.13) самостоятельны, а остальные являются их следствиями, то есть решение системы первых r уравнений автоматически является решением остальных уравнений.
Возможны два случая.
1. r=n. Тогда система, состоящая из первых r уравнений, имеет одинаковое число уравнений и неизвестных и совместна, причем решение ее единственно. 2. r (1.16)
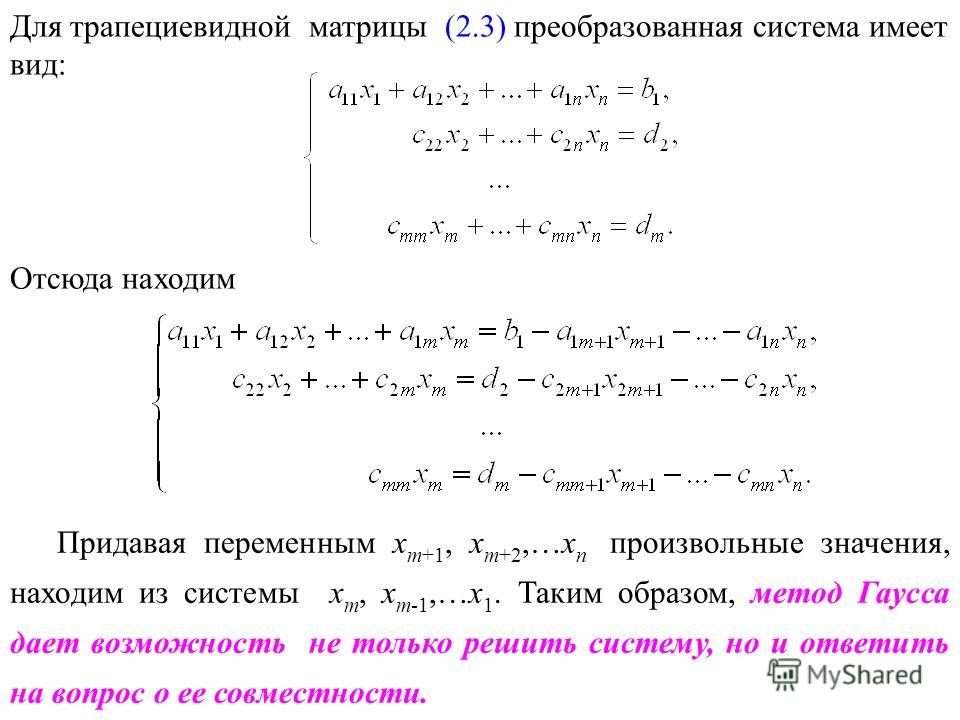
«Свободным» неизвестным x r +1 , x r +2 , …, x n можно придать какие угодно значения. Тогда соответствующие значения получают неизвестные x 1 , x 2 , …, x r . Система (1.13) и в этом случае совместная, но неопределенная.
Замечание. Отличный от нуля минор порядка r, где rх
1 , х 2 , …, х r так же называют базисными, остальные – свободными. Систему (1.16) называют укороченной.
Если свободные неизвестные обозначить х r +1 =c 1 , х r +2 =c 2 , …, х n =c n — r , то базисные неизвестные будут от них зависеть, то есть решение системы m уравнений с n неизвестными будет иметь вид
X = (x 1 (c 1 , …, c n — r ), x 2 (c 1 , …, c n — r ), …, x r (c 1 , …, c n — r ), c 1 , c 2 , …, c n — r ) T , где значок Т означает транспонирование.
Такое решение системы называется общим. 2. r (1.16)
«Свободным» неизвестным x r +1 , x r +2 , …, x n можно придать какие угодно значения. Тогда соответствующие значения получают неизвестные x 1 , x 2 , …, x r . Система (1.13) и в этом случае совместная, но неопределенная.
Замечание. Отличный от нуля минор порядка r, где rх
1 , х 2 , …, х r так же называют базисными, остальные – свободными. Систему (1.16) называют укороченной.
Если свободные неизвестные обозначить х r +1 =c 1 , х r +2 =c 2 , …, х n =c n — r , то базисные неизвестные будут от них зависеть, то есть решение системы m уравнений с n неизвестными будет иметь вид
X = (x 1 (c 1 , …, c n — r ), x 2 (c 1 , …, c n — r ), …, x r (c 1 , …, c n — r ), c 1 , c 2 , …, c n — r ) T , где значок Т означает транспонирование.
Такое решение системы называется общим. |
36)ус-е определенности, неопределенности
Система m линейных уравнений с n неизвестными (или, линейная система ) в линейной алгебре — это система уравнений вида
Здесь x 1 , x 2 , …, x n — неизвестные, которые надо определить. a 11 , a 12 , …, a mn — коэффициенты системы — и b 1 , b 2 , … b m — свободные члены — предполагаются известными. Индексы коэффициентов (a ij ) системы обозначают номера уравнения (i ) и неизвестного (j ), при котором стоит этот коэффициент, соответственно .
a 11 , a 12 , …, a mn — коэффициенты системы — и b 1 , b 2 , … b m — свободные члены — предполагаются известными. Индексы коэффициентов (a ij ) системы обозначают номера уравнения (i ) и неизвестного (j ), при котором стоит этот коэффициент, соответственно .
Система (1) называется однородной , если все её свободные члены равны нулю (b 1 = b 2 = … = b m = 0), иначе — неоднородной .
Система (1) называется совместной , если она имеет хотя бы одно решение, и несовместной , если у неё нет ни одного решения.
Совместная система вида (1) может иметь одно или более решений.
Решения c 1 (1) , c 2 (1) , …, c n (1) и c 1 (2) , c 2 (2) , …, c n (2) совместной системы вида (1) называются различными , если нарушается хотя бы одно из равенств:
c 1 (1) = c 1 (2) , c 2 (1) = c 2 (2) , …, c n (1) = c n (2) .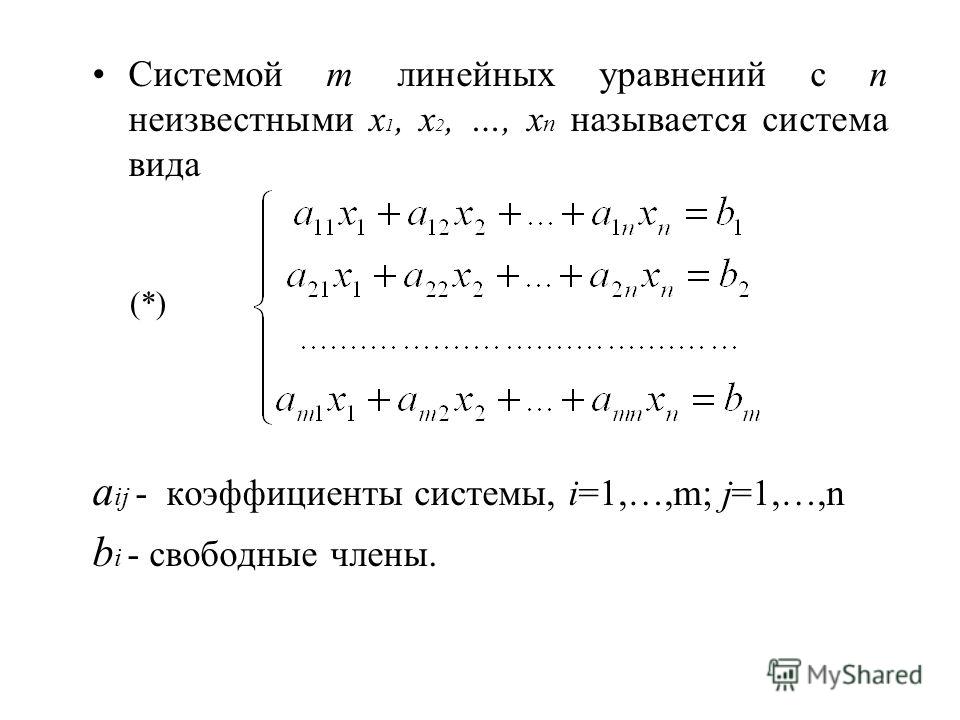 |
Совместная система вида (1) называется определённой , если она имеет единственное решение; если же у неё есть хотя бы два различных решения, то она называется неопределённой
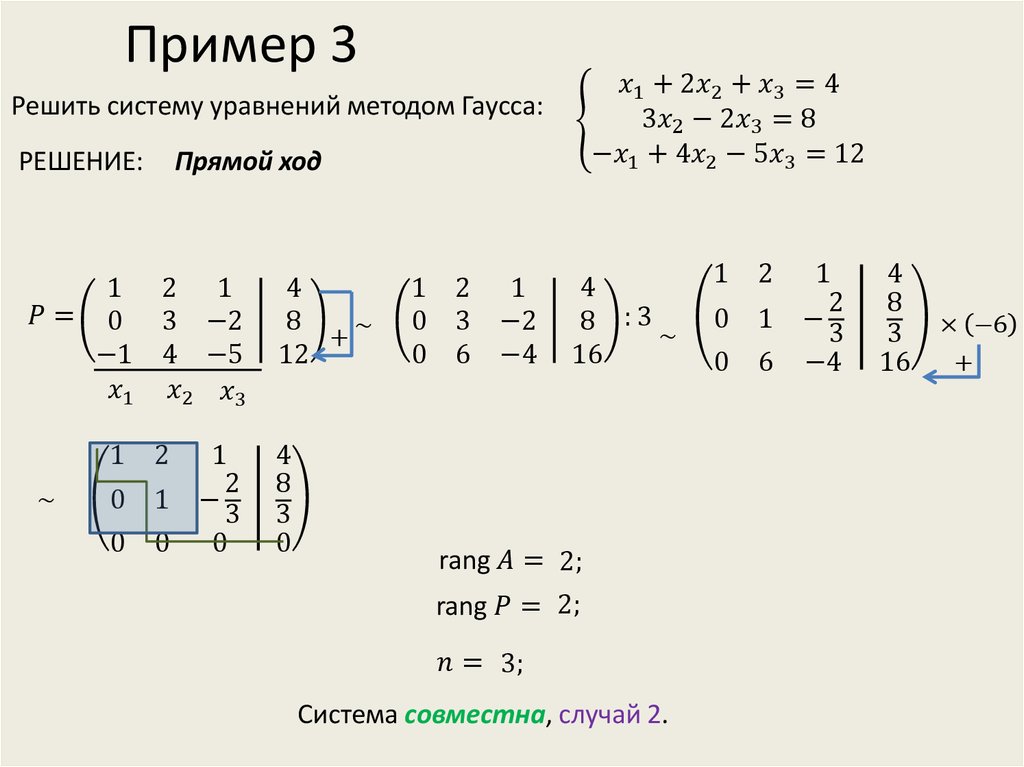
37)Решение систем линейных уравнений методом Гаусса
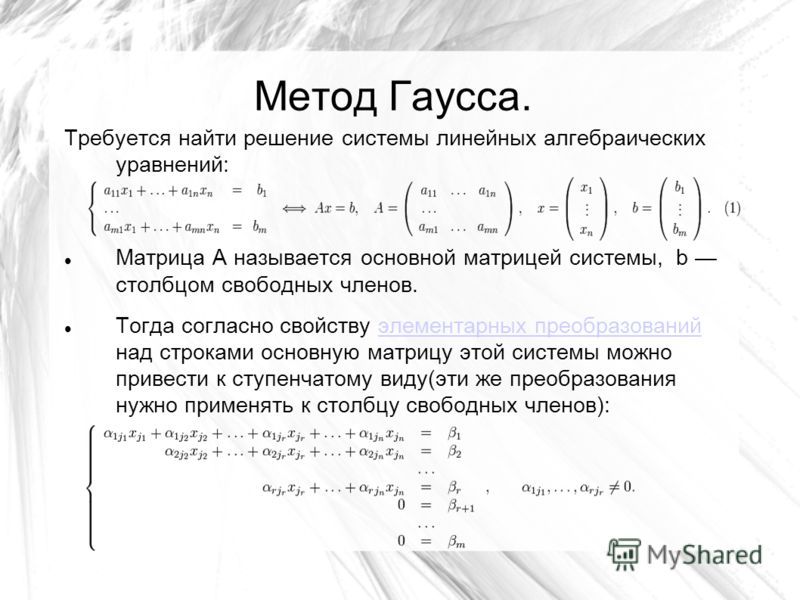
Пусть исходная система выглядит следующим образом
Матрица A называется основной матрицей системы, b — столбцом свободных членов.
Тогда согласно свойству элементарных преобразований над строками основную матрицу этой системы можно привести к ступенчатому виду(эти же преобразования нужно применять к столбцу свободных членов):
Тогда переменные называются главными переменными . Все остальные называются свободными .
[править]Условие совместности
Упомянутое выше условие для всех может быть сформулировано в качестве необходимого и достаточного условия совместности:
Напомним, что рангом совместной системы называется ранг её основной матрицы (либо расширенной, так как они равны).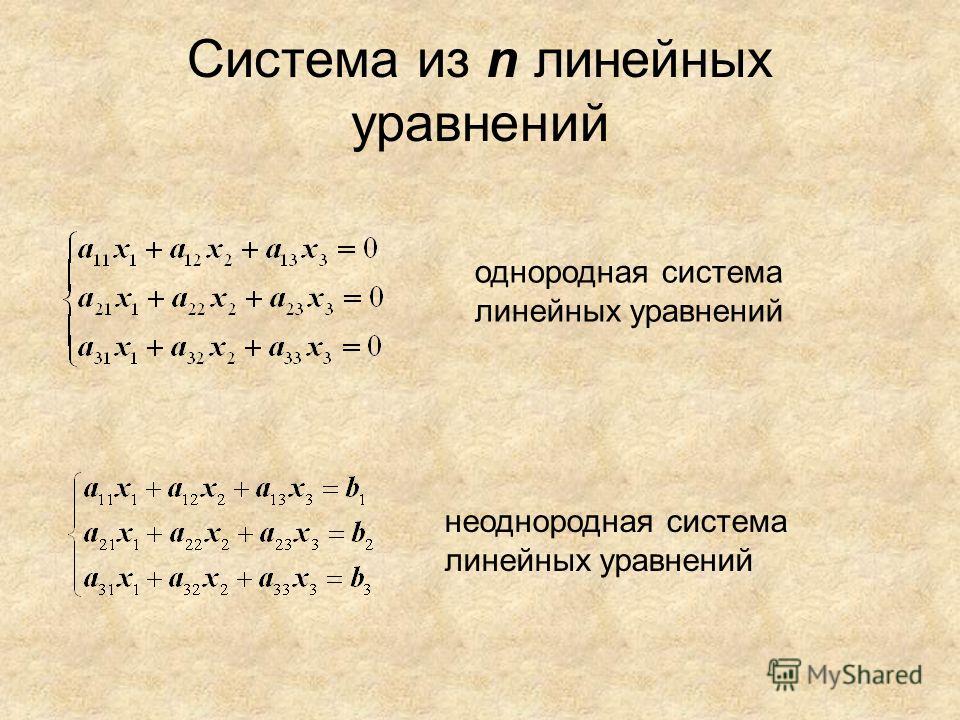
Алгоритм
Описание
Алгоритм решения СЛАУ методом Гаусса подразделяется на два этапа.
§ На первом этапе осуществляется так называемый прямой ход, когда путём элементарных преобразований над строками систему приводят к ступенчатой или треугольной форме, либо устанавливают, что система несовместна. А именно, среди элементов первого столбца матрицы выбирают ненулевой, перемещают его на крайнее верхнее положение перестановкой строк и вычитают получившуюся после перестановки первую строку из остальных строк, домножив её на величину, равную отношению первого элемента каждой из этих строк к первому элементу первой строки, обнуляя тем самым столбец под ним. После того, как указанные преобразования были совершены, первую строку и первый столбец мысленно вычёркивают и продолжают пока не останется матрица нулевого размера. Если на какой-то из итераций среди элементов первого столбца не нашёлся ненулевой, то переходят к следующему столбцу и проделывают аналогичную операцию.
§ На втором этапе осуществляется так называемый обратный ход, суть которого заключается в том, чтобы выразить все получившиеся базисные переменные через небазисные и построить фундаментальную систему решений, либо, если все переменные являются базисными, то выразить в численном виде единственное решение системы линейных уравнений. Эта процедура начинается с последнего уравнения, из которого выражают соответствующую базисную переменную (а она там всего одна) и подставляют в предыдущие уравнения, и так далее, поднимаясь по «ступенькам» наверх. Каждой строчке соответствует ровно одна базисная переменная, поэтому на каждом шаге, кроме последнего (самого верхнего), ситуация в точности повторяет случай последней строки.
Метод Гаусса требует порядка O (n 3) действий.
Этот метод опирается на:
38)Теорема Кронекера-Капелли.
Система совместна тогда и только тогда, когда ранг её основной матрицы равен рангу её расширенной матрицы.
2.4 Однородные системы линейных алгебраических уравнений
Линейная система называется однородной,
если все ее свободные члены равны 0.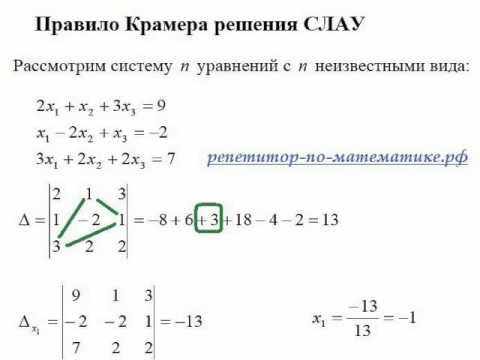
(2)
В матричном виде однородная система записывается: .
Однородная система (2) всегда совместна. Очевидно, что набор чисел,, …,удовлетворяет каждому уравнению системы. Решениеназываетсянулевым илитривиальнымрешением. Таким образом, однородная система всегда имеет нулевое решение.
При каких условиях однородная система (2) будет иметь ненулевые (нетривиальные) решения?
Теорема 1.3 Однородная система (2)имеет ненулевые решениятогда и только тогда, когда рангrее основной матрицыменьше числа неизвестныхn.
Система (2) – неопределенная .
Следствие 1. Если число уравненийm однородной
системы меньше числа переменных,
то система является неопределенной и
имеет множество ненулевых решений.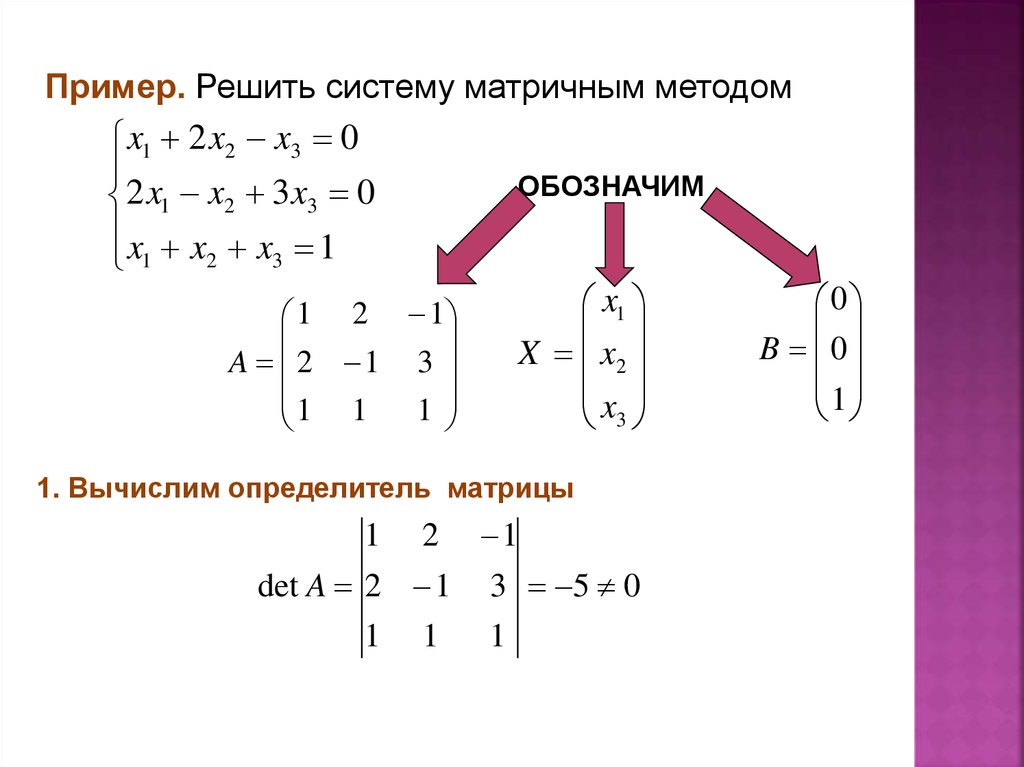
Следствие 2. Квадратная однородная системаимеет ненулевые решения тогда и тогда, когда основная матрица этой системывырождена, т.е. определитель.
В противном случае, если определитель , квадратная однородная система имеетединственноенулевое решение.
Пусть ранг системы (2) т. е система (2) имеет нетривиальные решения.
Пусть и- частные решения этой системы, т.е.и.
Свойства решений однородной системы
Если и- решения однородной системы, то их сумма (+) также является решением данной системы.
Действительно, .
Если — решение однородной системы, то при умножении его на произвольное числотакже получим решение этой системы, т.е.- решение системы.
Действительно, .
Объединяя, свойства 1) и 2), можно сказать, что если …,- решения однородной системы (2), то и всякая их линейная комбинация- также является ее решением. Здесь- произвольные действительные числа.
Можно найти линейно независимых частных решенийоднородной системы (2), с помощью которых можно получить любое другое частное решение данной системы, т.е. получить общее решение системы (2).
Определение 2.2 Совокупностьлинейно независимых частных решений…,однородной системы (2) таких, что каждое решение системы (2) можно представить в виде их линейной комбинации, называетсяфундаментальной системой решений (ФСР) однородной системы (2).
Пусть …,- фундаментальная система решений, тогда общее решение однородной системы (2) можно представить в виде:
,
где.
Замечание. Чтобы получить ФСР, нужно найти частные решения…,, придавая поочередно какой-либо одной свободной переменной значение «1», а всем остальным свободным переменным – значения «0».
Получим ,, …,- ФСР.
Пример. Найти общее решение и фундаментальную систему решений однородной системы уравнений:
Решение. Запишем расширенную матрицу системы, предварительно поставив на первое место последнее уравнение системы, и приведем ее к ступенчатому виду. Поскольку правые части уравнений в результате элементарных преобразований не меняются, оставаясь нулями, столбец
можно не выписывать.
̴̴̴
Ранг системы где- число переменных. Система неопределенная, имеет множество решений.
Базисный минор при переменных
отличен
от нуля:выбираемв качестве базисных переменных, остальные- свободные переменные (принимают любые
действительные значения).
Последней в цепочке матрице соответствует ступенчатая система уравнений:
(3)
Выразим базисные переменные через свободные переменные(обратный ход метода Гаусса).
Из последнего уравнения выразим :и подставим в первое уравнение. Получим. Раскроем скобки, приведем подобные и выразим:.
Полагая ,,, где, запишем
— общее решение системы.
Найдем фундаментальную систему решений
,,.
Тогда общее решение однородной системы можно записать в виде:
.
Замечание. ФСР можно было найти другим путем, без предварительного отыскания общего решения системы. Для этого полученную ступенчатую систему (3) нужно было решить трижды, полагая для:; для:; для:.
Как решить однородную систему линейных уравнений.
 Фундаментальная система решений (конкретный пример). Свойства систем линейных однородных уравнений
Фундаментальная система решений (конкретный пример). Свойства систем линейных однородных уравненийСистемы линейных уравнений, у которой все свободные члены равны нулю, называются однородными :
Любая однородная система всегда совместна, поскольку всегда обладает нулевым (тривиальным ) решением. Возникает вопрос, при каких условиях однородная система будет иметь нетривиальное решение.
Теорема 5.2. Однородная система имеет нетривиальное решение тогда и только тогда, когда ранг основной матрицы меньше числа ее неизвестных.
Следствие . Квадратная однородная система имеет нетривиальное решение тогда и только тогда, когда определитель основной матрицы системы не равен нулю.
Пример 5.6. Определить значения параметра l, при которых система имеет нетривиальные решения, и найти эти решения:
Решение . Эта система будет иметь нетривиальное решение тогда, когда определитель основной матрицы равен нулю:
Таким образом, система нетривиальна, когда l=3 или l=2.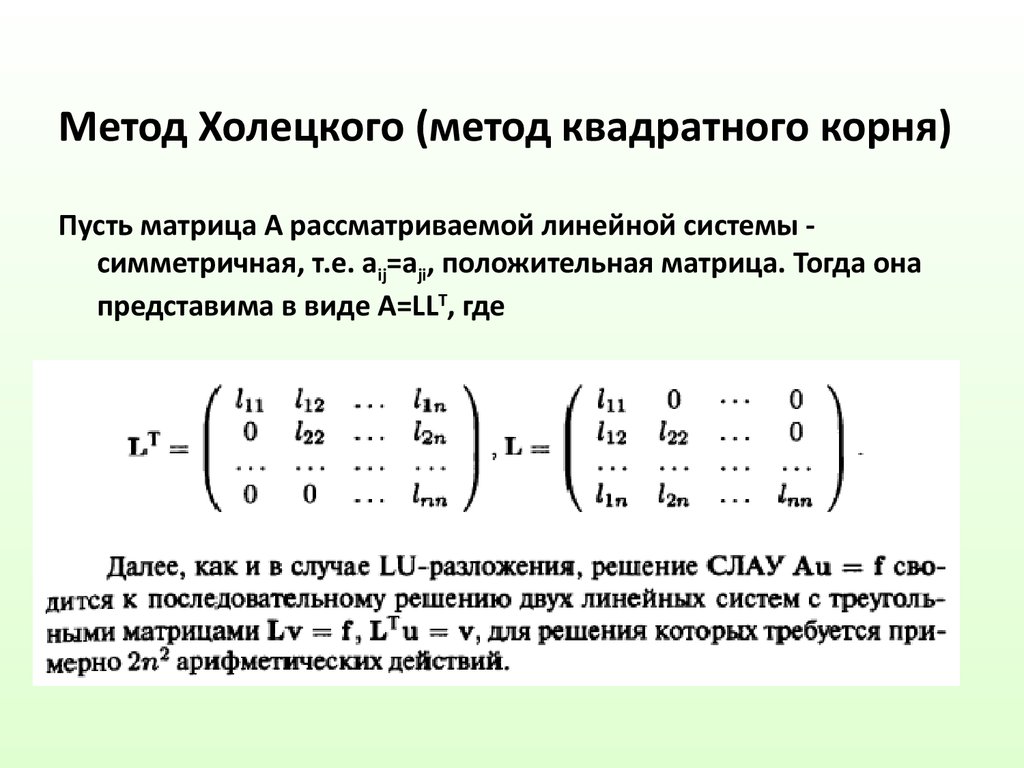 При l=3 ранг основной матрицы системы равен 1. Тогда оставляя только одно уравнение и полагая, что y =a и z =b , получим x=b-a , т.е.
При l=3 ранг основной матрицы системы равен 1. Тогда оставляя только одно уравнение и полагая, что y =a и z =b , получим x=b-a , т.е.
При l=2 ранг основной матрицы системы равен 2. Тогда, выбирая в качестве базисного минор:
получим упрощенную систему
Отсюда находим, что x=z /4, y=z /2. Полагая z =4a , получим
Множество всех решений однородной системы обладает весьма важным линейным свойством : если столбцы X 1 и X 2 — решения однородной системы AX = 0 , то всякая их линейная комбинация aX 1 + bX 2 также будет решением этой системы . Действительно, поскольку AX 1 = 0 и AX 2 = 0 , то A (aX 1 + bX 2) = aAX 1 + bAX 2 = a · 0 + b · 0 = 0. Именно вследствие этого свойства, если линейная система имеет более одного решения, то этих решений будет бесконечно много.
Линейно независимые столбцы E 1 , E 2 , E k , являющиеся решениями однородной системы, называется фундаментальной системой решений однородной системы линейных уравнений, если общее решение этой системы можно записать в виде линейной комбинации этих столбцов:
Если однородная система имеет n переменных, а ранг основной матрицы системы равен r , то k = n-r .
Пример 5.7. Найти фундаментальную систему решений следующей системы линейных уравнений:
Решение . Найдем ранг основной матрицы системы:
Таким образом, множество решений данной системы уравнений образует линейное подпространство размерности n — r = 5 — 2 = 3. Выберем в качестве базисного минор
Тогда оставляя только базисные уравнения (остальные будут линейной комбинацией этих уравнений) и базисные переменные (осталь-ные, так называемые свободные, переменные переносим вправо), по-лучим упрощенную систему уравнений:
Полагая, x 3 = a , x 4 = b , x 5 = c , находим
Полагая a = 1, b = c = 0, получим первое базисное решение; полагая b = 1, a = c = 0, получим второе базисное решение; полагая c = 1, a = b = 0, получим третье базисное решение. В результате, нормальная фундаментальная система решений примет вид
С использованием фундаментальной системы общее решение однородной системы можно записать в виде
X = aE 1 + bE 2 + cE 3 .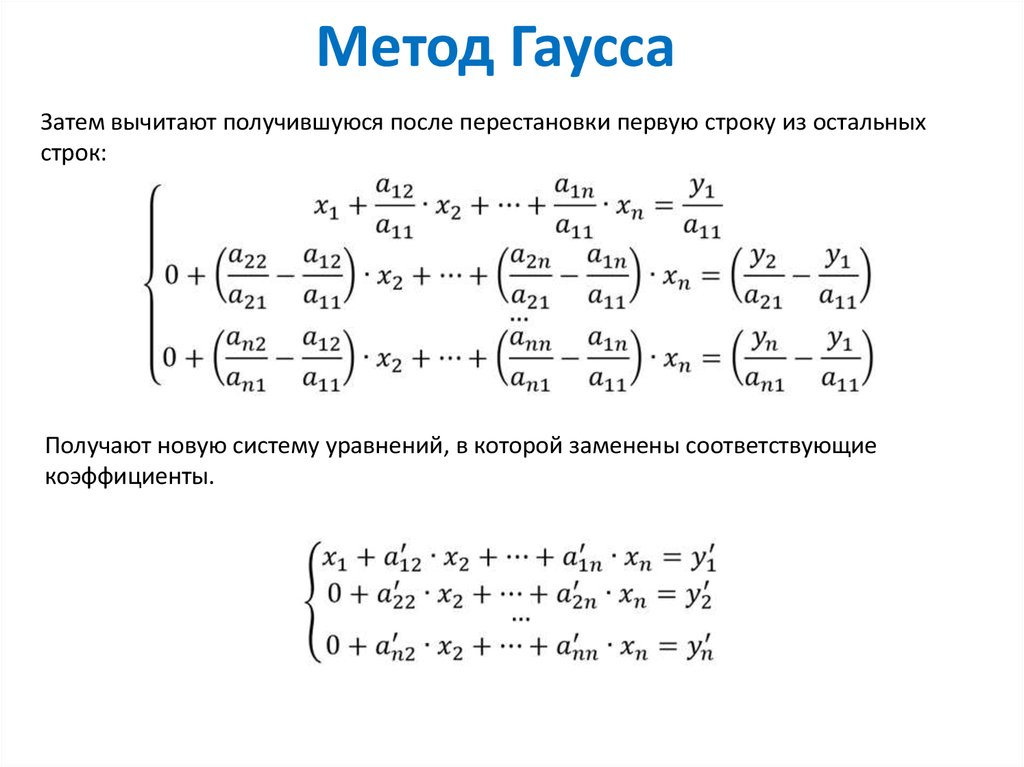 à
à
Отметим некоторые свойства решений неоднородной системы линейных уравнений AX=B и их взаимосвязь соответствующей однородной системой уравнений AX = 0.
Общее решение неоднородной системы равно сумме общего решения соответствующей однородной системы AX = 0 и произвольного частного решения неоднородной системы . Действительно, пусть Y 0 произвольное частное решение неоднородной системы, т.е. AY 0 = B , и Y — общее решение неоднородной системы, т.е. AY = B . Вычитая одно равенство из другого, получим
A (Y-Y 0) = 0, т.е. Y — Y 0 есть общее решение соответствующей однородной системы AX =0. Следовательно, Y — Y 0 = X , или Y = Y 0 + X . Что и требовалось доказать.
Пусть неоднородная система имеет вид AX = B 1 + B 2 . Тогда общее решение такой системы можно записать в виде X = X 1 + X 2 , где AX 1 = B 1 и AX 2 = B 2 . Это свойство выражает универсальное свойство вообще любых линейных систем (алгебраических, дифференциальных, функциональных и т.д.). В физике это свойство называется принципом суперпозиции , в электро- и радиотехнике — принципом наложения . Например, в теории линейных электрических цепей ток в любом контуре может быть получен как алгебраическая сумма токов, вызываемых каждым источником энергии в отдельности.
Это свойство выражает универсальное свойство вообще любых линейных систем (алгебраических, дифференциальных, функциональных и т.д.). В физике это свойство называется принципом суперпозиции , в электро- и радиотехнике — принципом наложения . Например, в теории линейных электрических цепей ток в любом контуре может быть получен как алгебраическая сумма токов, вызываемых каждым источником энергии в отдельности.
Однородная система линейных уравнений AX = 0 всегда совместна. Она имеет нетривиальные (ненулевые) решения, если r = rank A .
Для однородных систем базисные переменные (коэффициенты при которых образуют базисный минор) выражаются через свободные переменные соотношениями вида:
Тогда n — r линейно независимыми вектор-решениями будут:
а любое другое решение является их линейной комбинацией. Вектор-решения образуют нормированную фундаментальную систему.
В линейном пространстве множество решений однородной системы линейных уравнений образует подпространство размерности n — r ; — базис этого подпространства.
Система m линейных уравнений с n неизвестными (или, линейная система
Здесь x 1 , x 2 , …, x n a 11 , a 12 , …, a mn — коэффициенты системы — иb 1 , b 2 , … b m a ij i ) и неизвестного (j
Система (1) называется однородной b 1 = b 2 = … = b m = 0), иначе —неоднородной .
Система (1) называется квадратной , если число m уравнений равно числу n неизвестных.
Решение системы (1) — совокупность n чисел c 1 , c 2 , …, c n , таких что подстановка каждого c i вместо x i в систему (1) обращает все её уравнения в тождества.
Система (1) называется совместной несовместной
Решения c 1 (1) , c 2 (1) , …, c n (1) и c 1 (2) , c 2 (2) , …, c n различными
c 1 (1) = c 1 (2) , c 2 (1) = c 2 (2) , …, c n (1) = c n (2) .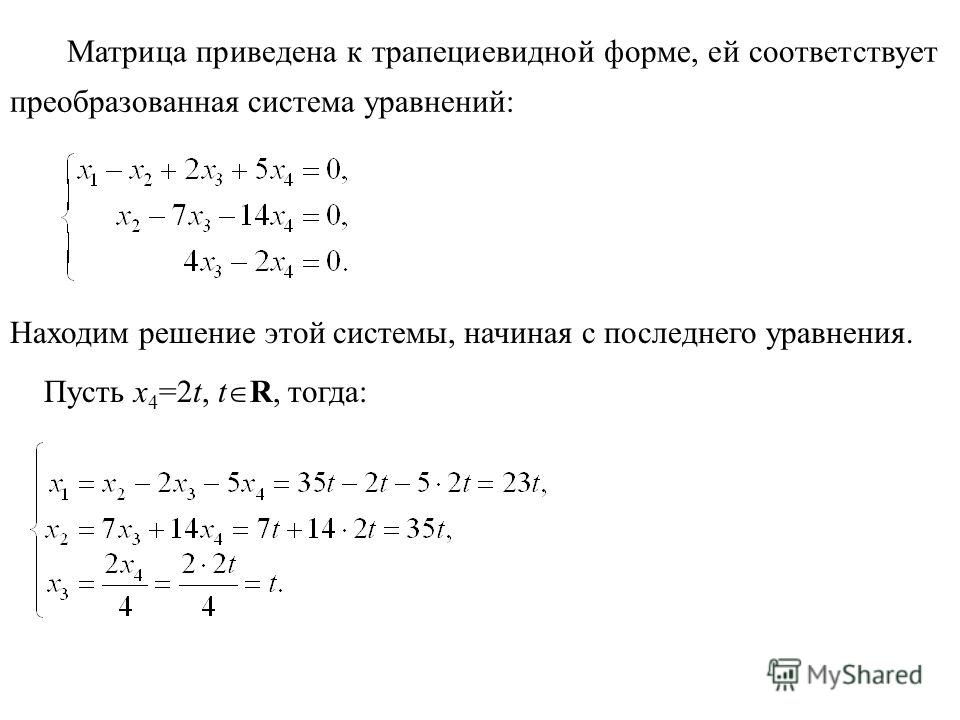 |
определённой неопределённой . Если уравнений больше, чем неизвестных, она называется переопределённой .
Решение систем линейных уравнений
Решение матричных уравнений ~ Метод Гаусса
Способы решения систем линейных уравнений делятся на две группы:
1. точные методы , представляющие собой конечные алгоритмы для вычисления корней системы (решение систем с помощью обратной матрицы, правило Крамера, метод Гаусса и др.),
2. итерационные методы , позволяющие получить решение системы с заданной точностью путем сходящихся итерационных процессов (метод итерации, метод Зейделя и др.).
Вследствие неизбежных округлений результаты даже точных методов являются приближенными. При использовании итерационных методов, сверх того, добавляется погрешность метода.
Эффективное применение итерационных методов существенно зависит от удачного выбора начального приближения и быстроты сходимости процесса.
Решение матричных уравнений
Рассмотрим систему n линейных алгебраических уравнений относительно n неизвестных х 1 , х 2 , …, х n :
. | (15) |
Матрица А , столбцами которой являются коэффициенты при соответствующих неизвестных, а строками — коэффициенты при неизвестных в соответствующем уравнении, называется матрицей системы ; матрица-столбец b , элементами которой являются правые части уравнений системы, называется матрицей правой части или просто правой частью системы . Матрица-столбец х , элементы которой — искомые неизвестные, называется решением системы .
Если матрица А — неособенная, то есть det A н е равен 0 то система (13), или эквивалентное ей матричное уравнение (14), имеет единственное решение.
В самом деле, при условии det A не равно 0 существует обратная матрица А -1 . Умножая обе части уравнения (14) на матрицу А -1 получим:
Формула (16) дает решение уравнения (14) и оно единственно.
Системы линейных уравнений удобно решать с помощью функции lsolve .
lsolve(А, b )
Возвращается вектор решения x такой, что Ах = b.
Аргументы:
А — квадратная, не сингулярная матрица.
b — вектор, имеющий столько же рядов, сколько рядов в матрице А .
На Рисунке 8 показано решение системы трех линейных уравнений относительно трех неизвестных.
Метод Гаусса
Метод Гаусса, его еще называют методом Гауссовых исключений, состоит в том, что систему (13) приводят последовательным исключением неизвестных к эквивалентной системе с треугольной матрицей:
В матричной записи это означает, что сначала (прямой ход метода Гаусса) элементарными операциями над строками приводят расширенную матрицу системы к ступенчатому виду:
а затем (обратный ход метода Гаусса) эту ступенчатую матрицу преобразуют так, чтобы в первых n столбцах получилась единичная матрица:
.
Последний, (n + 1) столбец этой матрицы содержит решение системы (13).
В Mathcad прямой и обратный ходы метода Гаусса выполняет функция rref (A ).
На Рисунке 9 показано решение системы линейных уравнений методом Гаусса, в котором используются следующие функции:
rref(A )
Возвращается ступенчатая форма матрицы А .
augment(A , В )
Возвращается массив, сформированный расположением A иВ бок о бок. Массивы A иВ должны иметь одинаковое число строк.
submatrix(A, ir, jr, ic, jc )
Возвращается субматрица, состоящая из всех элементов с ir по jr и столбцах с ic по jc. Удостоверьтесь, что ir jr и
ic jc, иначе порядок строк и (или) столбцов будет обращен.
Рисунок 9.
Описание метода
Для системы n линейных уравнений с n неизвестными (над произвольным полем)
с определителем матрицы системы Δ, отличным от нуля, решение записывается в виде
(i-ый столбец матрицы системы заменяется столбцом свободных членов).
В другой форме правило Крамера формулируется так: для любых коэффициентов c1, c2, …, cn справедливо равенство:
В этой форме формула Крамера справедлива без предположения, что Δ отлично от нуля, не нужно даже, чтобы коэффициенты системы были бы элементами целостного кольца(определитель системы может быть даже делителем нуля в кольце коэффициентов). Можно также считать, что либо наборы b1,b2,…,bn и x1,x2,…,xn, либо набор c1,c2,…,cn состоят не из элементов кольца коэффициентов системы, а какого-нибудь модуля над этим кольцом. В этом виде формула Крамера используется, например, при доказательстве формулы дляопределителя Грама и Леммы Накаямы.
| 35) Теорема Кронекера-Капелли |
Для того чтобы система m неоднородных линейных уравнений с n неизвестными была совместной, необходимо и достаточно, чтобы
Доказательство необходимости.
Пусть система (1.13) совместна, то есть существуют такие числа х 1 =α 1 , х 2 =α 2 , …, х n =α n , что
(1. 15)
Вычтем из последнего столбца расширенной матрицы ее первый столбец, умноженный на α 1 , второй – на α 2 , …, n-ый – умноженный на α n , то есть из последнего столбца матрицы (1.14) следует вычесть левые части равенств (1.15). Тогда получим матрицу
ранг которой в результате элементарных преобразований не изменится и . Но очевидно, и, значит,
Доказательство достаточности.
Пусть и пусть для определенности не равный нулю минор порядка r расположен в левом верхнем углу матрицы:
Это означает, что остальные строки матрицы могут быть получены как линейные комбинации первых r строк, то есть m-r строк матрицы можно представить в виде сумм первых r строк, умноженных на некоторые числа. Но тогда первые r уравнений системы (1.13) самостоятельны, а остальные являются их следствиями, то есть решение системы первых r уравнений автоматически является решением остальных уравнений.
Возможны два случая.
1. r=n. Тогда система, состоящая из первых r уравнений, имеет одинаковое число уравнений и неизвестных и совместна, причем решение ее единственно. 15)
Вычтем из последнего столбца расширенной матрицы ее первый столбец, умноженный на α 1 , второй – на α 2 , …, n-ый – умноженный на α n , то есть из последнего столбца матрицы (1.14) следует вычесть левые части равенств (1.15). Тогда получим матрицу
ранг которой в результате элементарных преобразований не изменится и . Но очевидно, и, значит,
Доказательство достаточности.
Пусть и пусть для определенности не равный нулю минор порядка r расположен в левом верхнем углу матрицы:
Это означает, что остальные строки матрицы могут быть получены как линейные комбинации первых r строк, то есть m-r строк матрицы можно представить в виде сумм первых r строк, умноженных на некоторые числа. Но тогда первые r уравнений системы (1.13) самостоятельны, а остальные являются их следствиями, то есть решение системы первых r уравнений автоматически является решением остальных уравнений.
Возможны два случая.
1. r=n. Тогда система, состоящая из первых r уравнений, имеет одинаковое число уравнений и неизвестных и совместна, причем решение ее единственно.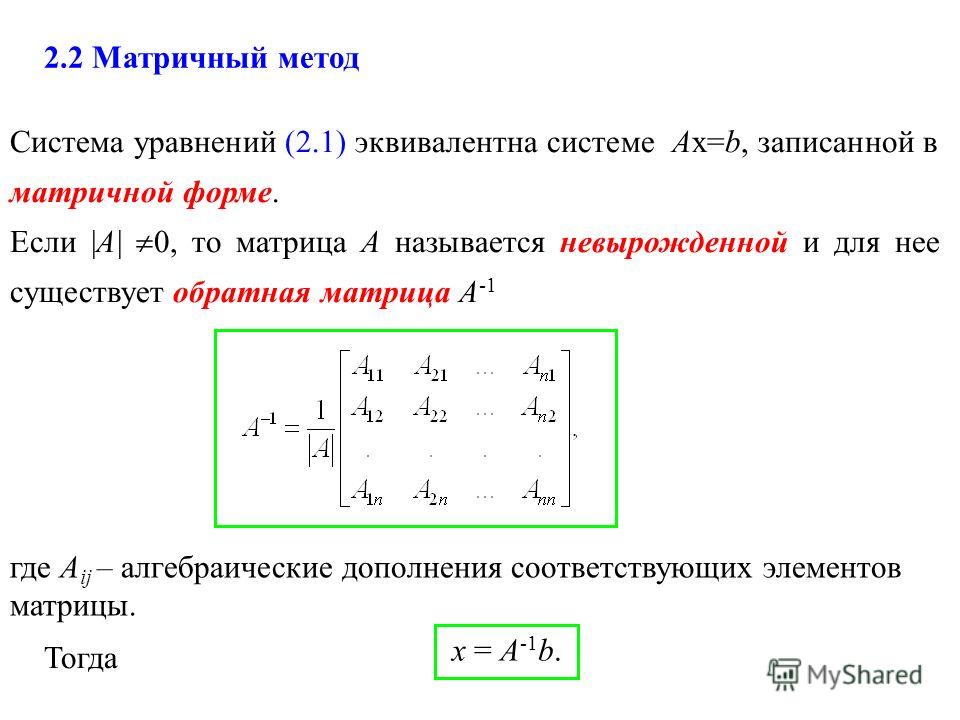 2. r (1.16)
«Свободным» неизвестным x r +1 , x r +2 , …, x n можно придать какие угодно значения. Тогда соответствующие значения получают неизвестные x 1 , x 2 , …, x r . Система (1.13) и в этом случае совместная, но неопределенная.
Замечание. Отличный от нуля минор порядка r, где rх
1 , х 2 , …, х r так же называют базисными, остальные – свободными. Систему (1.16) называют укороченной.
Если свободные неизвестные обозначить х r +1 =c 1 , х r +2 =c 2 , …, х n =c n — r , то базисные неизвестные будут от них зависеть, то есть решение системы m уравнений с n неизвестными будет иметь вид
X = (x 1 (c 1 , …, c n — r ), x 2 (c 1 , …, c n — r ), …, x r (c 1 , …, c n — r ), c 1 , c 2 , …, c n — r ) T , где значок Т означает транспонирование.
Такое решение системы называется общим. 2. r (1.16)
«Свободным» неизвестным x r +1 , x r +2 , …, x n можно придать какие угодно значения. Тогда соответствующие значения получают неизвестные x 1 , x 2 , …, x r . Система (1.13) и в этом случае совместная, но неопределенная.
Замечание. Отличный от нуля минор порядка r, где rх
1 , х 2 , …, х r так же называют базисными, остальные – свободными. Систему (1.16) называют укороченной.
Если свободные неизвестные обозначить х r +1 =c 1 , х r +2 =c 2 , …, х n =c n — r , то базисные неизвестные будут от них зависеть, то есть решение системы m уравнений с n неизвестными будет иметь вид
X = (x 1 (c 1 , …, c n — r ), x 2 (c 1 , …, c n — r ), …, x r (c 1 , …, c n — r ), c 1 , c 2 , …, c n — r ) T , где значок Т означает транспонирование.
Такое решение системы называется общим. |
36)ус-е определенности, неопределенности
Система m линейных уравнений с n неизвестными (или, линейная система ) в линейной алгебре — это система уравнений вида
Здесь x 1 , x 2 , …, x n — неизвестные, которые надо определить. a 11 , a 12 , …, a mn — коэффициенты системы — и b 1 , b 2 , … b m — свободные члены — предполагаются известными. Индексы коэффициентов (a ij ) системы обозначают номера уравнения (i ) и неизвестного (j ), при котором стоит этот коэффициент, соответственно .
a 11 , a 12 , …, a mn — коэффициенты системы — и b 1 , b 2 , … b m — свободные члены — предполагаются известными. Индексы коэффициентов (a ij ) системы обозначают номера уравнения (i ) и неизвестного (j ), при котором стоит этот коэффициент, соответственно .
Система (1) называется однородной , если все её свободные члены равны нулю (b 1 = b 2 = … = b m = 0), иначе — неоднородной .
Система (1) называется совместной , если она имеет хотя бы одно решение, и несовместной , если у неё нет ни одного решения.
Совместная система вида (1) может иметь одно или более решений.
Решения c 1 (1) , c 2 (1) , …, c n (1) и c 1 (2) , c 2 (2) , …, c n (2) совместной системы вида (1) называются различными , если нарушается хотя бы одно из равенств:
c 1 (1) = c 1 (2) , c 2 (1) = c 2 (2) , …, c n (1) = c n (2) .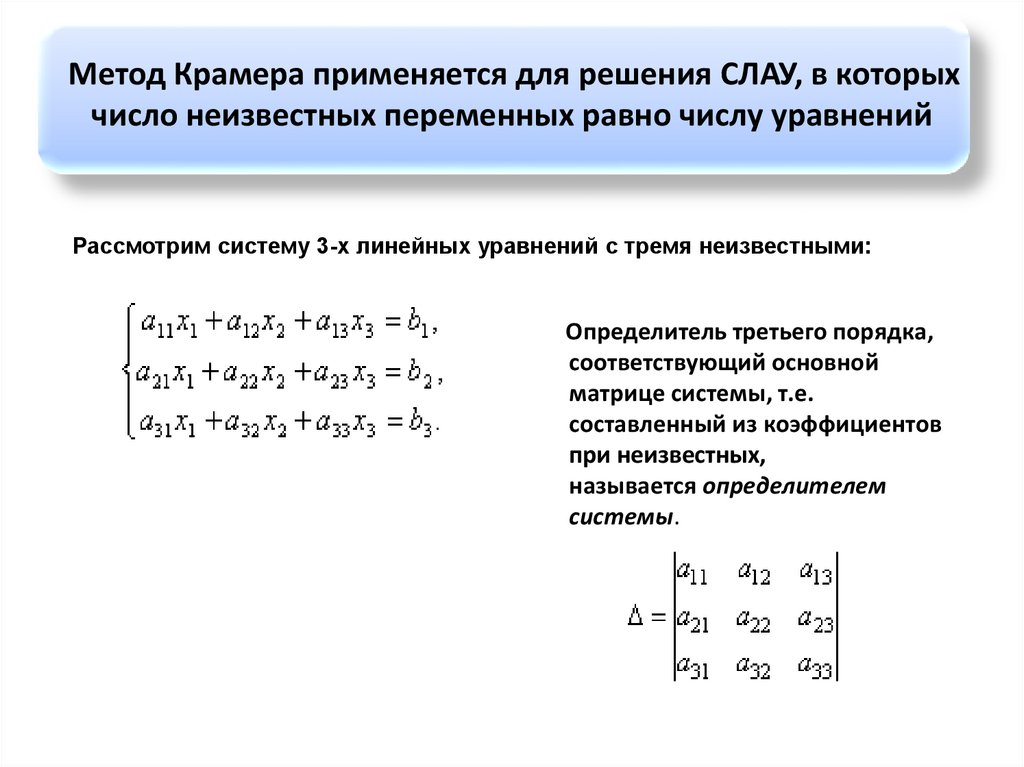 |
Совместная система вида (1) называется определённой , если она имеет единственное решение; если же у неё есть хотя бы два различных решения, то она называется неопределённой
37)Решение систем линейных уравнений методом Гаусса
Пусть исходная система выглядит следующим образом
Матрица A называется основной матрицей системы, b — столбцом свободных членов.
Тогда согласно свойству элементарных преобразований над строками основную матрицу этой системы можно привести к ступенчатому виду(эти же преобразования нужно применять к столбцу свободных членов):
Тогда переменные называются главными переменными . Все остальные называются свободными .
[править]Условие совместности
Упомянутое выше условие для всех может быть сформулировано в качестве необходимого и достаточного условия совместности:
Напомним, что рангом совместной системы называется ранг её основной матрицы (либо расширенной, так как они равны).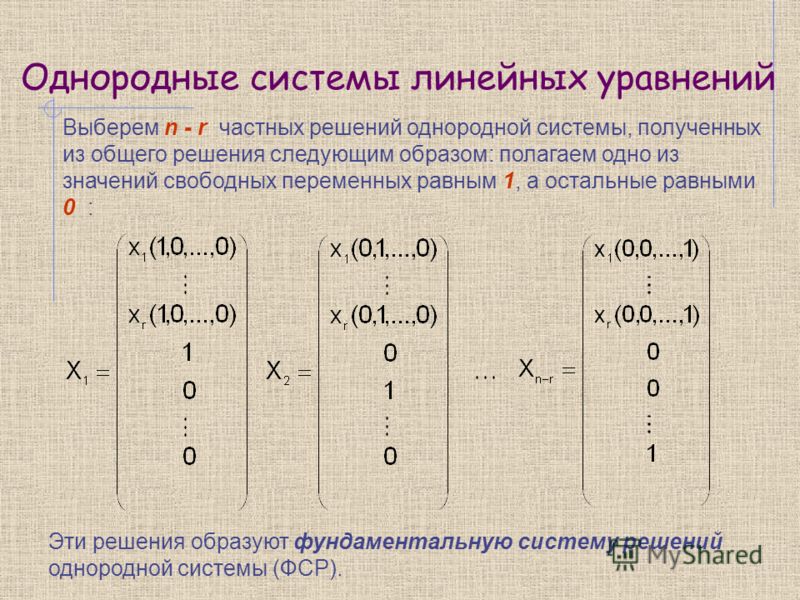
Алгоритм
Описание
Алгоритм решения СЛАУ методом Гаусса подразделяется на два этапа.
§ На первом этапе осуществляется так называемый прямой ход, когда путём элементарных преобразований над строками систему приводят к ступенчатой или треугольной форме, либо устанавливают, что система несовместна. А именно, среди элементов первого столбца матрицы выбирают ненулевой, перемещают его на крайнее верхнее положение перестановкой строк и вычитают получившуюся после перестановки первую строку из остальных строк, домножив её на величину, равную отношению первого элемента каждой из этих строк к первому элементу первой строки, обнуляя тем самым столбец под ним. После того, как указанные преобразования были совершены, первую строку и первый столбец мысленно вычёркивают и продолжают пока не останется матрица нулевого размера. Если на какой-то из итераций среди элементов первого столбца не нашёлся ненулевой, то переходят к следующему столбцу и проделывают аналогичную операцию.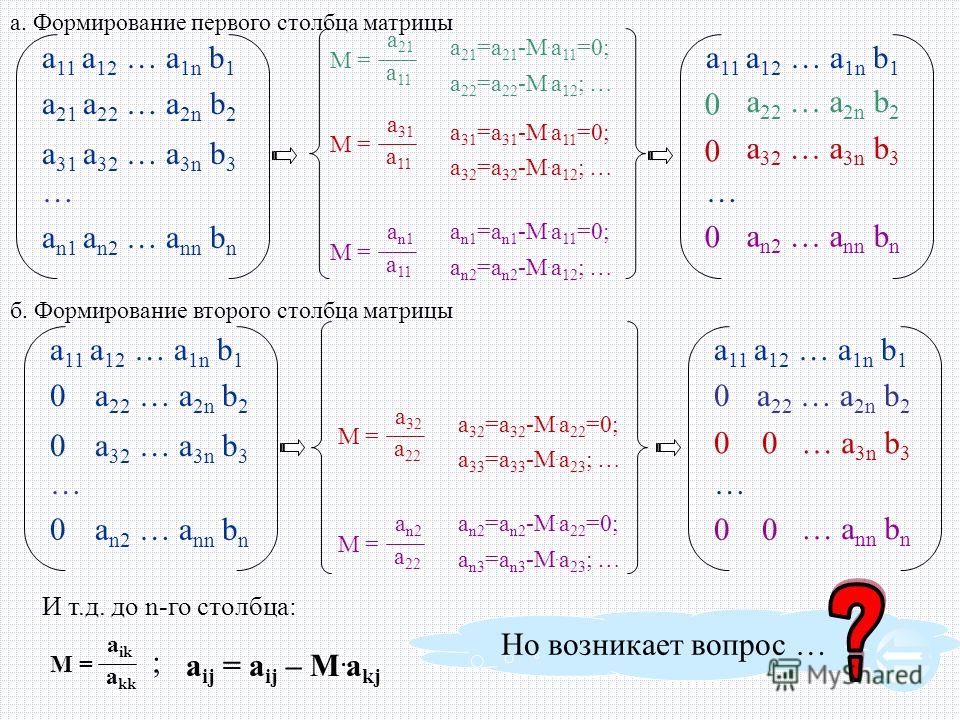
§ На втором этапе осуществляется так называемый обратный ход, суть которого заключается в том, чтобы выразить все получившиеся базисные переменные через небазисные и построить фундаментальную систему решений, либо, если все переменные являются базисными, то выразить в численном виде единственное решение системы линейных уравнений. Эта процедура начинается с последнего уравнения, из которого выражают соответствующую базисную переменную (а она там всего одна) и подставляют в предыдущие уравнения, и так далее, поднимаясь по «ступенькам» наверх. Каждой строчке соответствует ровно одна базисная переменная, поэтому на каждом шаге, кроме последнего (самого верхнего), ситуация в точности повторяет случай последней строки.
Метод Гаусса требует порядка O (n 3) действий.
Этот метод опирается на:
38)Теорема Кронекера-Капелли.
Система совместна тогда и только тогда, когда ранг её основной матрицы равен рангу её расширенной матрицы.
Пример 1
. Найти общее решение и какую-нибудь фундаментальную систему решений для системы
Найти общее решение и какую-нибудь фундаментальную систему решений для системы
Решение находим с помощью калькулятора . Алгоритм решения такой же, как и для систем линейных неоднородных уравнений.
Оперируя только со строками, находим ранг матрицы, базисный минор; объявляем зависимые и свободные неизвестные и находим общее решение.
Первая и вторая строки пропорциональны, одну из них вычеркнем:
.
Зависимые переменные – x 2 , x 3 , x 5 , свободные – x 1 , x 4 . Из первого уравнения 10x 5 = 0 находим x 5 = 0, тогда
; .
Общее решение имеет вид:
Находим фундаментальную систему решений, которая состоит из (n-r) решений. В нашем случае n=5, r=3, следовательно, фундаментальная система решений состоит из двух решений, причем эти решения должны быть линейно независимыми. Чтобы строки были линейно независимыми, необходимо и достаточно, чтобы ранг матрицы, составленной из элементов строк, был равен количеству строк, то есть 2. Достаточно придать свободным неизвестным x 1 и x 4 значения из строк определителя второго порядка, отличного от нуля, и подсчитать x 2 , x 3 , x 5 . Простейшим определителем, отличным от нуля, является .
Достаточно придать свободным неизвестным x 1 и x 4 значения из строк определителя второго порядка, отличного от нуля, и подсчитать x 2 , x 3 , x 5 . Простейшим определителем, отличным от нуля, является .
Таким образом, первое решение: , второе – .
Эти два решения составляют фундаментальную систему решений. Заметим, что фундаментальная система не единственна (определителей, отличных от нуля, можно составить сколько угодно).
Пример 2
. Найти общее решение и фундаментальную систему решений системы
Решение.
,
отсюда следует, что ранг матрицы равен 3 и равен числу неизвестных. Значит, система не имеет свободных неизвестных, а поэтому имеет единственное решение – тривиальное.
Задание
. Исследовать и решить систему линейных уравнений.
Пример 4
Задание
. Найти общее и частное решения каждой системы.
Решение. Выпишем основную матрицу системы:
| 5 | -2 | 9 | -4 | -1 |
| 1 | 4 | 2 | 2 | -5 |
| 6 | 2 | 11 | -2 | -6 |
| x 1 | x 2 | x 3 | x 4 | x 5 |
Приведем матрицу к треугольному виду.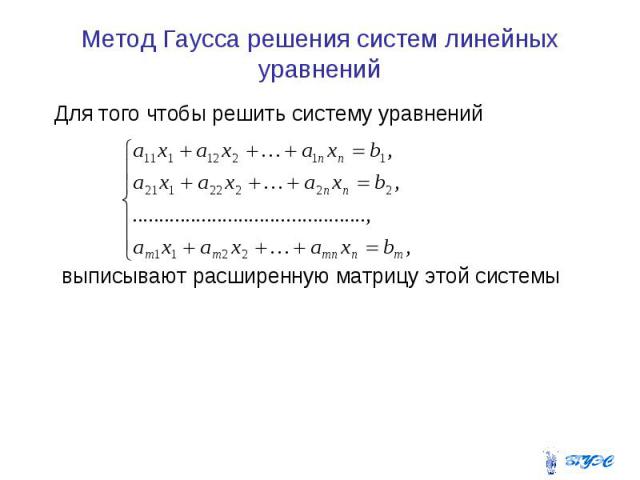 Будем работать только со строками, так как умножение строки матрицы на число, отличное от нуля, и прибавление к другой строке для системы означает умножение уравнения на это же число и сложение с другим уравнением, что не меняет решения системы.
Будем работать только со строками, так как умножение строки матрицы на число, отличное от нуля, и прибавление к другой строке для системы означает умножение уравнения на это же число и сложение с другим уравнением, что не меняет решения системы.
Умножим 2-ую строку на (-5). Добавим 2-ую строку к 1-ой:
| 0 | -22 | -1 | -14 | 24 |
| 1 | 4 | 2 | 2 | -5 |
| 6 | 2 | 11 | -2 | -6 |
Умножим 2-ую строку на (6). Умножим 3-ую строку на (-1). Добавим 3-ую строку к 2-ой:
Найдем ранг матрицы.
| 0 | 22 | 1 | 14 | -24 |
| 6 | 2 | 11 | -2 | -6 |
| x 1 | x 2 | x 3 | x 4 | x 5 |
Выделенный минор имеет наивысший порядок (из возможных миноров) и отличен от нуля (он равен произведению элементов, стоящих на обратной диагонали), следовательно rang(A) = 2.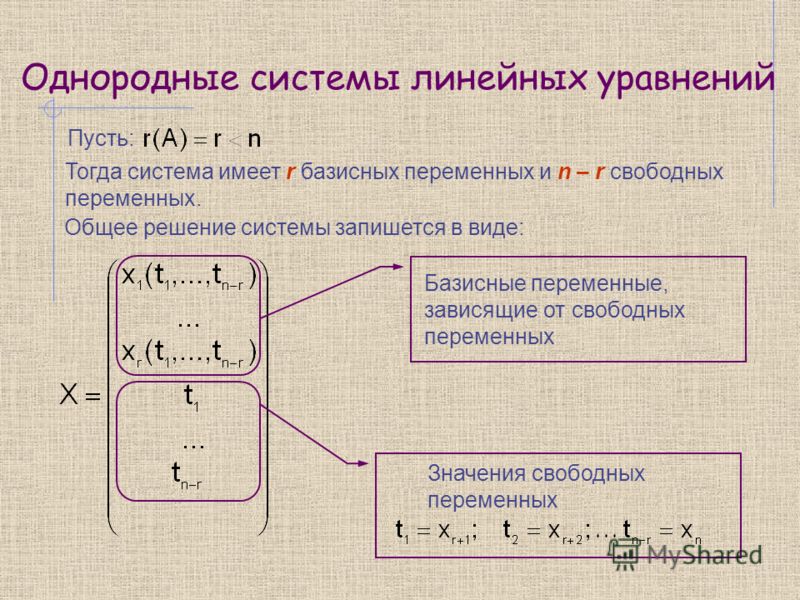
Этот минор является базисным. В него вошли коэффициенты при неизвестных x 1 ,x 2 , значит, неизвестные x 1 ,x 2 – зависимые (базисные), а x 3 ,x 4 ,x 5 – свободные.
Преобразуем матрицу, оставляя слева только базисный минор.
| 0 | 22 | 14 | -1 | -24 |
| 6 | 2 | -2 | -11 | -6 |
| x 1 | x 2 | x 4 | x 3 | x 5 |
Система с коэффициентами этой матрицы эквивалентна исходной системе и имеет вид:
22x 2 = 14x 4 — x 3 — 24x 5
6x 1 + 2x 2 = — 2x 4 — 11x 3 — 6x 5
Методом исключения неизвестных находим нетривиальное решение :
Получили соотношения, выражающие зависимые переменные x 1 ,x 2 через свободные x 3 ,x 4 ,x 5 , то есть нашли общее решение :
x 2 = 0. 64x 4 — 0.0455x 3 — 1.09x 5
64x 4 — 0.0455x 3 — 1.09x 5
x 1 = — 0.55x 4 — 1.82x 3 — 0.64x 5
Находим фундаментальную систему решений, которая состоит из (n-r) решений.
В нашем случае n=5, r=2, следовательно, фундаментальная система решений состоит из 3-х решений, причем эти решения должны быть линейно независимыми.
Чтобы строки были линейно независимыми, необходимо и достаточно, чтобы ранг матрицы, составленной из элементов строк, был равен количеству строк, то есть 3.
Достаточно придать свободным неизвестным x 3 ,x 4 ,x 5 значения из строк определителя 3-го порядка, отличного от нуля, и подсчитать x 1 ,x 2 .
Простейшим определителем, отличным от нуля, является единичная матрица.
| 1 | 0 | 0 |
| 0 | 1 | 0 |
| 0 | 0 | 1 |
Задача . Найти фундаментальный набор решений однородной системы линейных уравнений.
Линейная система называется однородной ,
если все ее свободные члены равны 0.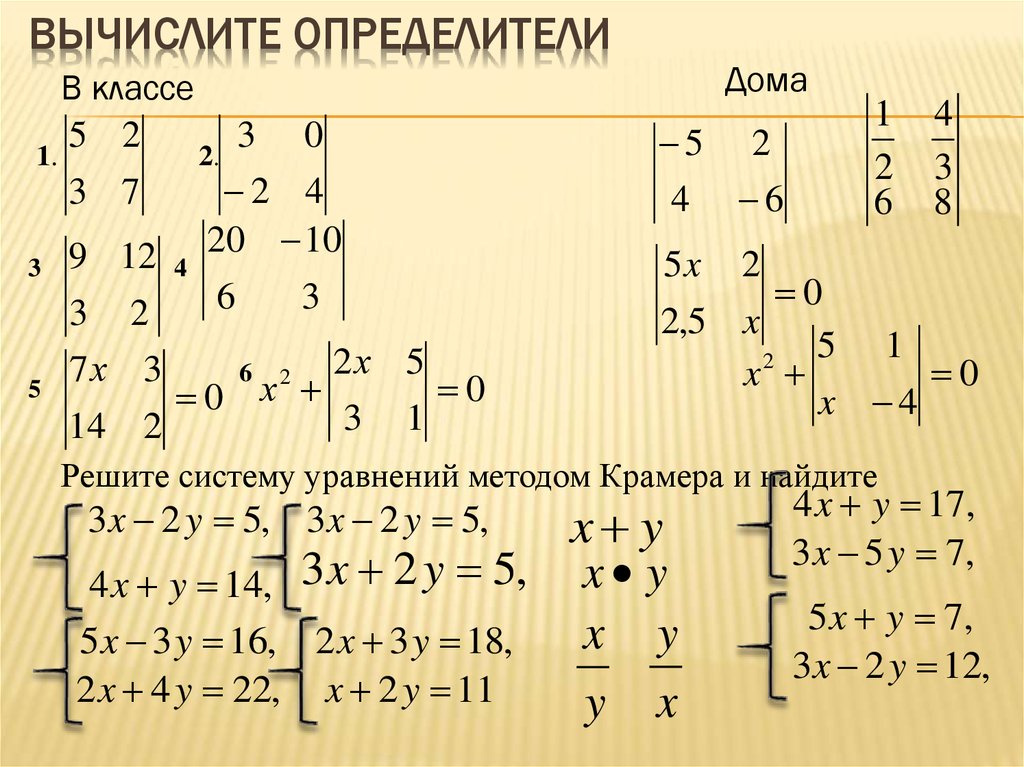
В матричном виде однородная система
записывается:
.
Однородная система (2) всегда совместна .
Очевидно, что набор чисел
,
,
…,
удовлетворяет каждому уравнению
системы. Решение
называетсянулевым илитривиальным решением. Таким образом, однородная
система всегда имеет нулевое решение.
При каких условиях однородная система (2) будет иметь ненулевые (нетривиальные) решения?
Теорема 1.3 Однородная система (2)имеет ненулевые решения тогда и только тогда, когда рангr ее основной матрицыменьше числа неизвестныхn .
Система (2) – неопределенная
.
Следствие 1. Если число уравненийm однородной
системы меньше числа переменных
,
то система является неопределенной и
имеет множество ненулевых решений.
Следствие 2. Квадратная однородная
система
имеет ненулевые решения тогда и тогда,
когда основная матрица этой системывырождена, т.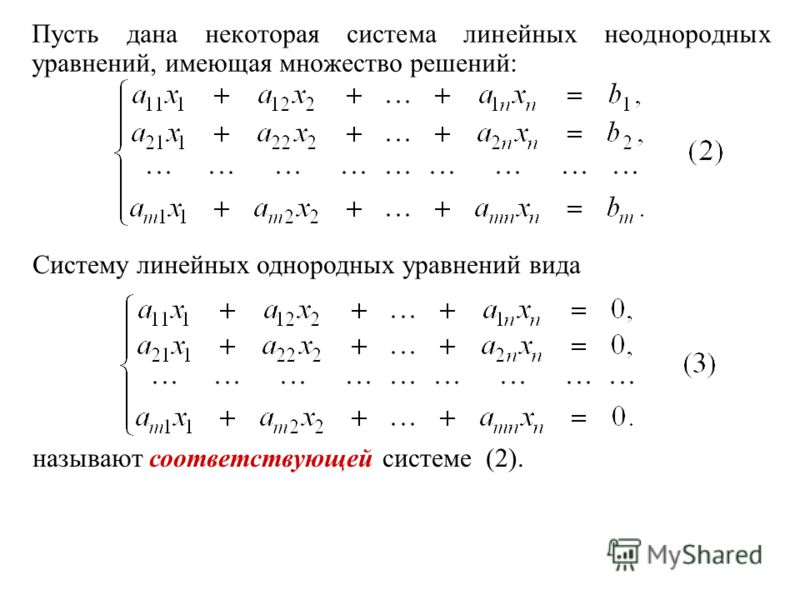 е. определитель
е. определитель
.
В противном случае, если определитель
,
квадратная однородная система имеетединственное нулевое решение
.
Пусть ранг системы (2)
т. е система (2) имеет нетривиальные
решения.
Пусть
и- частные решения этой системы, т.е.
и
.
Свойства решений однородной системы
Действительно, .
Действительно, .
Объединяя, свойства 1) и 2), можно
сказать, что если
…,
— решения однородной системы (2), то и
всякая их линейная комбинация-
также является ее решением. Здесь
—
произвольные действительные числа.
Можно найти
линейно независимых частных решений однородной системы (2), с помощью которых
можно получить любое другое частное
решение данной системы, т.е. получить
общее решение системы (2).
Определение 2.2 Совокупность
линейно независимых частных решений
…,
однородной системы (2) таких, что каждое
решение системы (2) можно представить
в виде их линейной комбинации, называетсяфундаментальной системой решений (ФСР) однородной системы (2).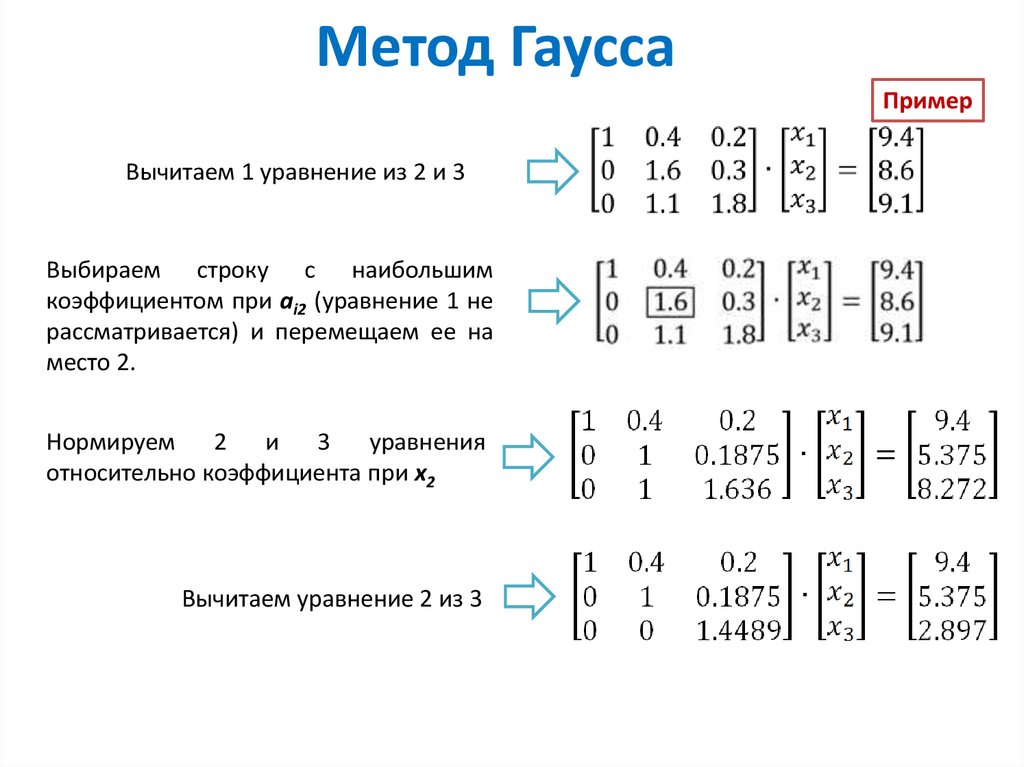
Пусть
…,
— фундаментальная система решений, тогда
общее решение однородной системы (2)
можно представить в виде:
Где
.
Замечание. Чтобы получить
ФСР, нужно найти частные решения
…,
,
придавая поочередно какой-либо одной
свободной переменной значение «1», а
всем остальным свободным переменным –
значения «0».
Получим ,, …,- ФСР.
Пример. Найти общее решение и фундаментальную систему решений однородной системы уравнений:
Решение. Запишем расширенную матрицу системы, предварительно поставив на первое место последнее уравнение системы, и приведем ее к ступенчатому виду. Поскольку правые части уравнений в результате элементарных преобразований не меняются, оставаясь нулями, столбец
можно не выписывать.
̴
̴
̴
Ранг системы
где
— число переменных. Система неопределенная,
имеет множество решений.
Базисный минор при переменных
отличен
от нуля:
выбираем
в качестве базисных переменных, остальные
— свободные переменные (принимают любые
действительные значения).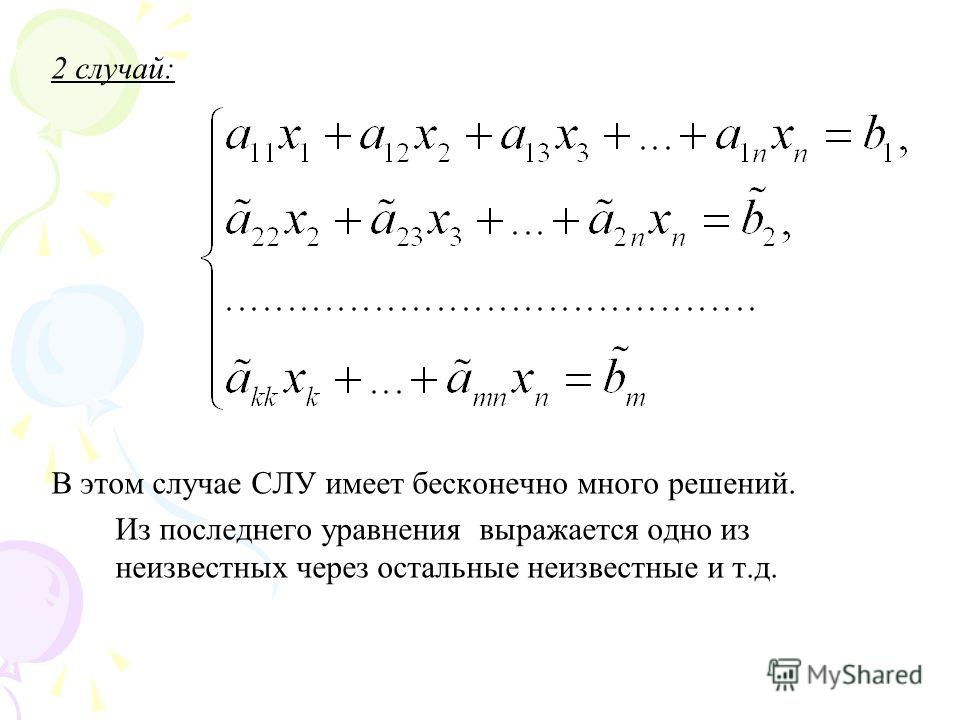
Последней в цепочке матрице соответствует ступенчатая система уравнений:
(3)
Выразим базисные переменные
через свободные переменные
(обратный ход метода Гаусса).
Из последнего уравнения выразим
:
и подставим в первое уравнение. Получим.
Раскроем скобки, приведем подобные и
выразим:
.
Полагая
,
,
,
где
,
запишем
— общее решение системы.
Найдем фундаментальную систему решений
,,.
Тогда общее решение однородной системы можно записать в виде:
Замечание. ФСР можно было найти
другим путем, без предварительного
отыскания общего решения системы. Для
этого полученную ступенчатую систему
(3) нужно было решить трижды, полагая
для:
;
для:
;
для:
.
6.3. ОДНОРОДНЫЕ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Пусть теперь в системе (6.1) .
Однородная система всегда совместна. Решение ( ) называется нулевым , или тривиальным .
Однородная система (6.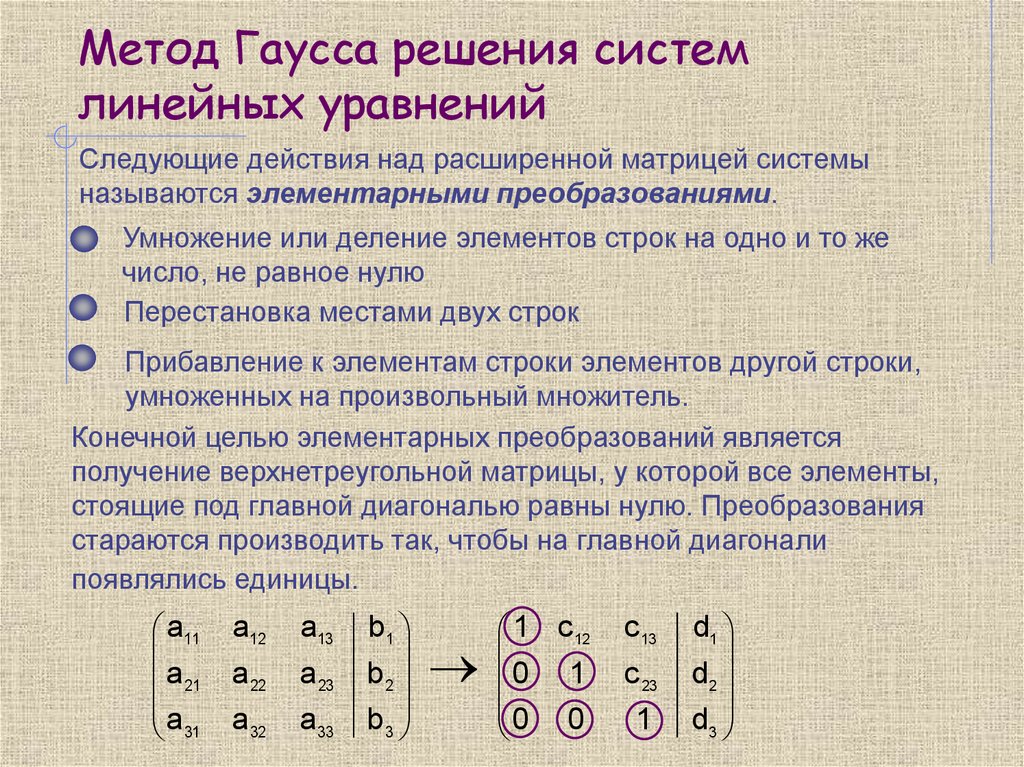 1) имеет
ненулевое решение тогда и только тогда, когда ее ранг ()
меньше числа неизвестных. В частности, однородная система, в которой число
уравнений равно числу неизвестных, обладает ненулевым решением тогда и только
тогда, когда ее определитель равен нулю.
1) имеет
ненулевое решение тогда и только тогда, когда ее ранг ()
меньше числа неизвестных. В частности, однородная система, в которой число
уравнений равно числу неизвестных, обладает ненулевым решением тогда и только
тогда, когда ее определитель равен нулю.
Поскольку на этот раз все , вместо формул (6.6) получим следующие:
(6.7)
Формулы (6.7) содержат любое решение однородной системы (6.1).
1. Совокупность всех решений однородной системы линейных уравнений (6.1) образует линейное пространство.
2. Линейное пространство R всех решений однородной системы линейных уравнений (6.1) с n неизвестными и рангом основной матрицы, равным r , имеет размерность n – r .
Любая совокупность из (n
–
r )
линейно независимых решений однородной системы (6.1) образует базис в
пространстве R всех решений. Она называется фундаментальной совокупностью решений
однородной системы уравнений (6.1). Особо выделяют «нормальную» фундаментальную совокупность решений однородной системы (6. 1):
1):
(6.8)
По определению базиса, любое решение Х однородной системы (6.1) представимо в виде
(6.9)
где – произвольные постоянные.
Поскольку в формуле (6.9) содержится любое решение однородной системы (6.1), то она дает общее решение этой системы.
Пример.
Однородные и неоднородные системы
Однородная система линейных уравнений
в котором все постоянные члены равны нулю. Однородная система всегда имеет
хотя бы одно решение, а именно нулевой вектор. Когда операция строки
применительно к однородной системе новая система остается однородной. это
Важно отметить, что когда мы представляем однородную систему в виде матрицы,
мы часто опускаем последний столбец постоянных членов, так как применяя
операции со строками не будут изменять этот столбец. Итак, используем обычную матрицу
вместо расширенной матрицы. Конечно, при поиске решения,
важно учитывать постоянные нулевые члены. n.$
n.$
Теорема: Рассмотрим систему линейных уравнений в $n$ переменных, и пусть $\vec p$ является решением системы. затем множество решений системы имеет вид $\{\vec p + a_1\vec v_1 + a_2\vec v_2 + \cdots + a_k\vec v_k \,|\, a_1,a_2,\dots,a_k\in\R \}$, где $\{a_1\vec v_1 + a_2\vec v_2 + \cdots + a_k\vec v_k \,|\, a_1,a_2,\dots,a_k\in\R \}$ есть множество решений ассоциированной однородной системы. (Таким образом, $k$ по-прежнему число свободных переменных в ступенчатой форме системы.)
Вектор $\vec p$ во второй теореме называется
частное решение системы. (Напомним, что для неоднородного
системы, возможно, что конкретного решения не существует, а множество решений пусто.)
Однородная система всегда имеет $\vec 0$ как частное решение, а второе
теорема применяется к однородным системам, если взять $\vec p=\vec 0$.
Обратите внимание, что для данной системы векторы $\vec p$ и $\vec v_i$ не уникальны.
Может быть много разных последовательностей операций со строками, которые можно использовать.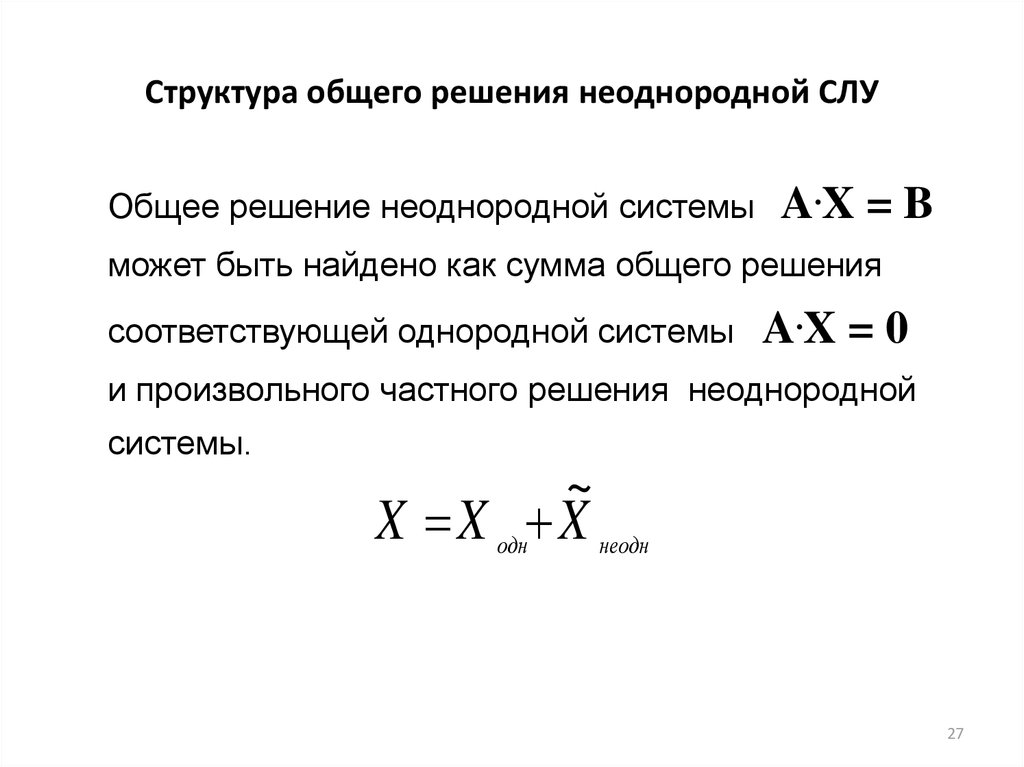 придать системе эшелонированную форму. $\vec p$ и $\vec v_i$, которые вы получаете
может зависеть от конкретной последовательности операций над строками, которые вы используете. Однако вы
можно получить только разные способы записи одного и того же набора решений. (возможно
удивительный факт, который до сих пор не доказан, состоит в том, что независимо от того, в какой последовательности
операций над строками, которые вы используете, чтобы привести систему в эшелонированную форму, вы всегда получаете
такое же количество свободных переменных. Это означает, что число $k$ в
система однозначно определяется системой.) 9Н$, что
содержит происхождение. Добавление
вектор $\vec p$ ко всем точкам этого линейного пространства дает «параллельную» линейную
пространство, содержащее $\vec p$. См.
второе изображение
в предыдущем разделе].
придать системе эшелонированную форму. $\vec p$ и $\vec v_i$, которые вы получаете
может зависеть от конкретной последовательности операций над строками, которые вы используете. Однако вы
можно получить только разные способы записи одного и того же набора решений. (возможно
удивительный факт, который до сих пор не доказан, состоит в том, что независимо от того, в какой последовательности
операций над строками, которые вы используете, чтобы привести систему в эшелонированную форму, вы всегда получаете
такое же количество свободных переменных. Это означает, что число $k$ в
система однозначно определяется системой.) 9Н$, что
содержит происхождение. Добавление
вектор $\vec p$ ко всем точкам этого линейного пространства дает «параллельную» линейную
пространство, содержащее $\vec p$. См.
второе изображение
в предыдущем разделе].
Другой важной темой раздела 1.I.3 учебника является
сингулярные и невырожденные матрицы. Это проблема только для квадратных
матрицы. (Квадратная матрица – это матрица, в которой
количество строк равно количеству столбцов.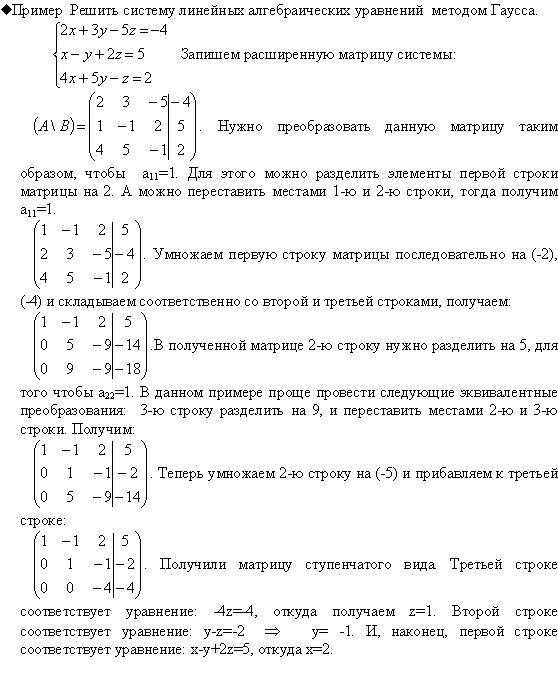 ) Квадратная матрица
ассоциированная матрица некоторой однородной системы. Так как матрица квадратная,
однородная система имеет столько же уравнений, сколько
переменные. Однородная система либо будет иметь $\vec 0$ как единственное решение, либо
она будет иметь бесконечное число решений. Говорят, что матрица
невырожденным, если система имеет единственное решение.
Она называется вырожденной, если система имеет бесконечное
количество решений. (Термины «сингулярный» и «несингулярный» только
применимы к квадратным матрицам.)
Заметим, что по приведенным выше теоремам квадратная матрица
сингулярна тогда и только тогда, когда она имеет хотя бы одну свободную переменную, когда ставится
в ступенчатую форму, что, в свою очередь, верно тогда и только тогда, когда ступенчатая
Форма матрицы имеет хотя бы одну строку, содержащую только нули. 9n$ размерности $n-1$ (если уравнение не является
тривиальное уравнение, $0=0$.) А так как $\vec 0$ является решением, то линейное
пространство проходит через начало координат.
) Квадратная матрица
ассоциированная матрица некоторой однородной системы. Так как матрица квадратная,
однородная система имеет столько же уравнений, сколько
переменные. Однородная система либо будет иметь $\vec 0$ как единственное решение, либо
она будет иметь бесконечное число решений. Говорят, что матрица
невырожденным, если система имеет единственное решение.
Она называется вырожденной, если система имеет бесконечное
количество решений. (Термины «сингулярный» и «несингулярный» только
применимы к квадратным матрицам.)
Заметим, что по приведенным выше теоремам квадратная матрица
сингулярна тогда и только тогда, когда она имеет хотя бы одну свободную переменную, когда ставится
в ступенчатую форму, что, в свою очередь, верно тогда и только тогда, когда ступенчатая
Форма матрицы имеет хотя бы одну строку, содержащую только нули. 9n$ размерности $n-1$ (если уравнение не является
тривиальное уравнение, $0=0$.) А так как $\vec 0$ является решением, то линейное
пространство проходит через начало координат.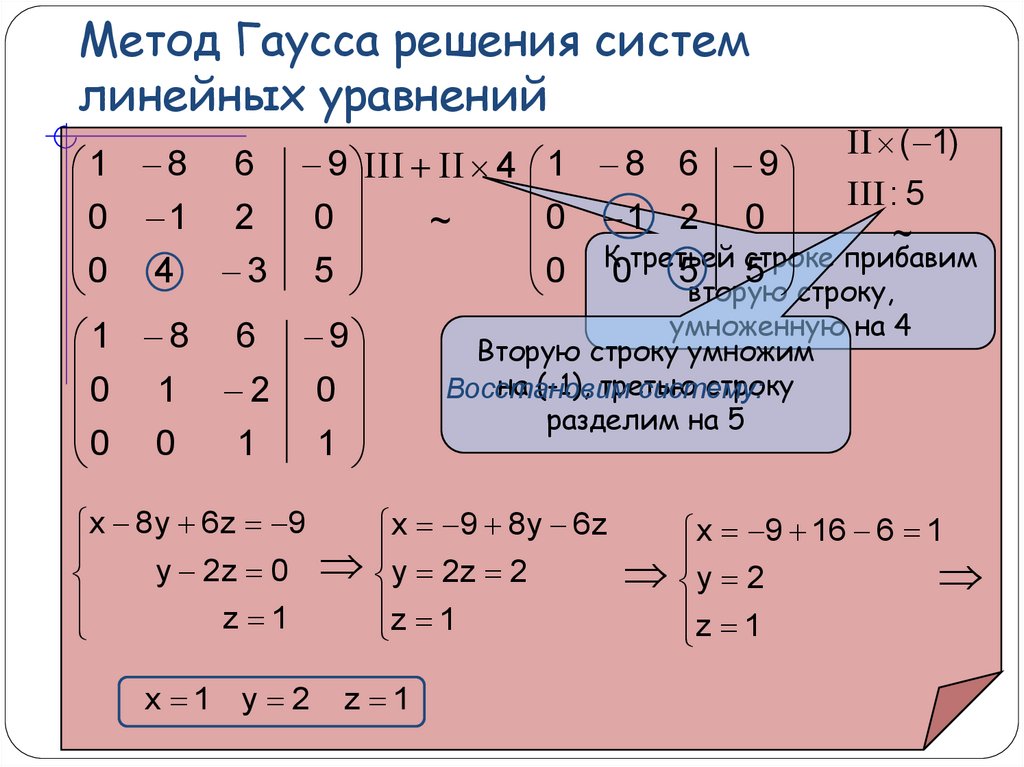 Набор решений для всей системы
пересечение множеств решений для всех отдельных уравнений;
то есть это пересечение $n$ линейных пространств размерности $n-1$.
Набор решений для всей системы
пересечение множеств решений для всех отдельных уравнений;
то есть это пересечение $n$ линейных пространств размерности $n-1$.
Например, если $n=2$, мы смотрим на пересечение двух линий через начало координат; возможности заключаются в том, что линии пересекаются только в начале координат [несингулярная матрица] или в том, что линии на самом деле идентичны [сингулярная матрица]. Конечно, если выбрать две строки наугад, очень маловероятно, что они идентичны. Это означает, что если вы выберете матрицу $2\times2$ случайным образом, это очень маловероятно. что он будет единичным.
При $n=3$ мы пересекаем три плоскости, содержащие начало координат.
пересечение двух плоскостей через начало координат является линией, если только плоскости не бывают
быть идентичным. Когда вы добавляете третью плоскость к пересечению, вы
скорее всего пересекает эту плоскость линией и в результате получится один
точка (а именно начало), за исключением маловероятного случая, когда линия происходит
полностью лежать в плоскости. n$ размерности $n-1$.
Взяв пересечение этого пространства с множеством решений
второе уравнение, вероятно, дает линейное пространство размерности $n-2$.
По мере того как набор решений для каждого уравнения добавляется к пересечению,
размер пересечения, вероятно, уменьшится на единицу. Когда вы получаете
пересечению множеств решений для всех $n$ уравнений, вы
вероятно, имеет пространство нулевой размерности — единственную точку, а именно
источник. Опять же, если вы выберете матрицу $n\times n$ наугад, это очень
вряд ли единичный. (Слово «сингулярный» означает «заметно необычный».)
n$ размерности $n-1$.
Взяв пересечение этого пространства с множеством решений
второе уравнение, вероятно, дает линейное пространство размерности $n-2$.
По мере того как набор решений для каждого уравнения добавляется к пересечению,
размер пересечения, вероятно, уменьшится на единицу. Когда вы получаете
пересечению множеств решений для всех $n$ уравнений, вы
вероятно, имеет пространство нулевой размерности — единственную точку, а именно
источник. Опять же, если вы выберете матрицу $n\times n$ наугад, это очень
вряд ли единичный. (Слово «сингулярный» означает «заметно необычный».)
Если рассматривать неоднородную линейную систему $n$ уравнений с $n$ переменными,
вы пересекаете наборы решений, которые не обязательно содержат начало координат.
Наиболее вероятная возможность пересечения по-прежнему одна точка,
и бесконечное пересечение все еще возможно. Но у вас также есть возможность
пустого перекрестка — нет решения — как это произошло бы, например, если бы
вы пересекаете две параллельные прямые.
Мы также можем подумать о том, что происходит, когда мы применяем сокращение строк к
представить матрицу размером $n\times n$ в ступенчатую форму. Рассмотрим матрицу как
матрица для однородной линейной системы, записанная без постоянного нуля
члены из правых частей уравнений.
$$\begin{pматрица}
c_{11} & c_{12} & \cdots & c_{1n}\\
c_{21} и c_{22} и \cdots и c_{2n}\\
\vdots&\vdots&\ddots&\vdots\\
c_{n1} & c_{n2} & \cdots & c_{nn}
\end{pmatrix}$$
Помните, что матрица квадратная, с таким же количеством строк, как и столбцов.
Матрица ступенчатой формы, полученная в результате редукции строк, будет иметь вид
$$
\begin{pmatrix}
д_{11} и д_{12} и \cdots и д_{1n}\\
0 и d_{22} и \cdots и d_{2n}\\
\vdots &\vdots &\ddots &\vdots\\
0 & \cdots & 0 & d_{nn}
\end{pmatrix}$$
где все элементы ниже диагонали равны нулю (и некоторые из $d_{ij}$ также могут быть равны нулю). Но может быть
все нулевые строки внизу. То есть $d_{nn}$ может быть равно нулю.
Если $d_{nn}\ne0$, то свободных переменных нет и однородная
система имеет $\vec 0$ как единственное решение. Если $d_{nn}=0$, то
есть по крайней мере одна ненулевая строка, и не более $n-1$ из $n$ строк отличны от нуля.
Таким образом, ведущих переменных не более $n-1$, а значит, существует хотя бы одна свободная переменная.
переменная; система имеет бесконечное число решений.
Если $d_{nn}=0$, то
есть по крайней мере одна ненулевая строка, и не более $n-1$ из $n$ строк отличны от нуля.
Таким образом, ведущих переменных не более $n-1$, а значит, существует хотя бы одна свободная переменная.
переменная; система имеет бесконечное число решений.
Теперь предположим, что у нас есть неоднородная система с одинаковым
матрица коэффициентов. Расширенная матрица для неоднородного
система имеет вид
$$\left(\begin{массив}{cccc|c}
c_{11} & c_{12} & \cdots & c_{1n} & a_1\\
c_{21} & c_{22} & \cdots & c_{2n} & a_2\\
\vdots&\vdots&\ddots&\vdots&\vdots\\
c_{n1} & c_{n2} & \cdots & c_{nn} & a_n
\end{массив}\right)$$
Если мы применим метод Гаусса, используя те же операции со строками, что и
используемого для однородной системы, получим матрицу вида
$$\left(\begin{массив}{cccc|c}
d_{11} и d_{12} и \cdots и d_{1n} и b_1\\
0 & d_{22} & \cdots & d_{2n} & b_2\\
\vdots &\vdots &\ddots &\vdots & \vdots\\
0 & \cdots & 0 & d_{nn} & b_n
\end{массив}\right)$$
Теперь в случае $d_{nn}\ne0$ свободных переменных нет, и мы можем решить систему, чтобы получить
уникальное решение.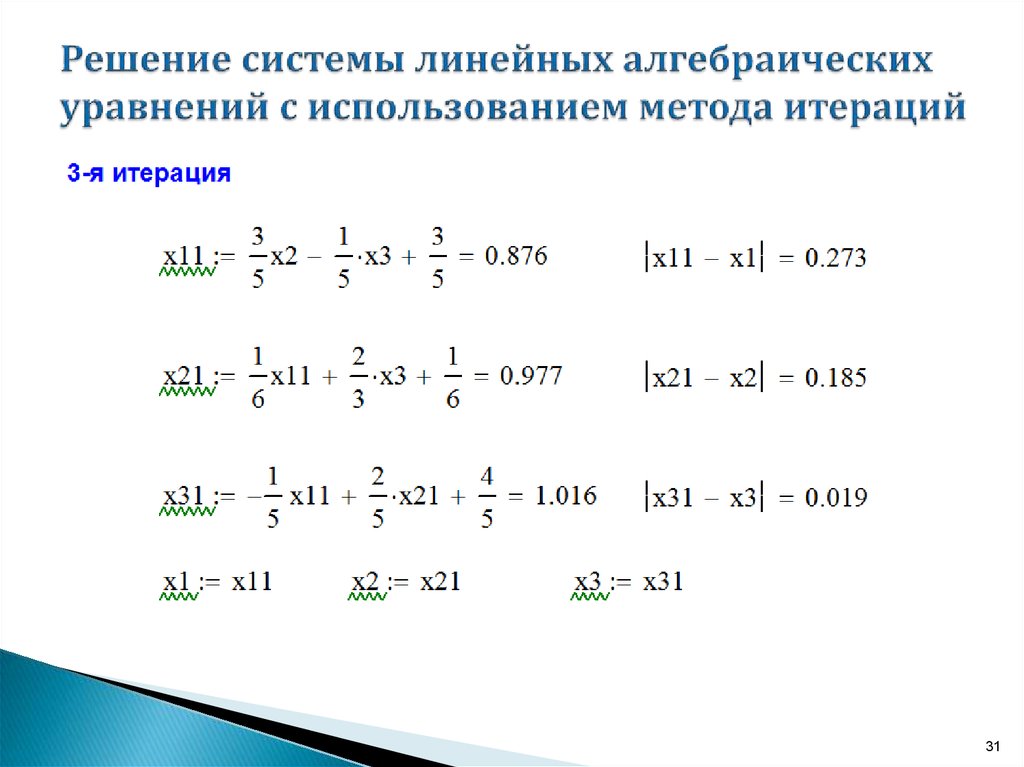 (Таким образом, линейная система, матрица коэффициентов которой
квадратная невырожденная матрица всегда будет иметь единственное решение.)
В случае $d_{nn}=0$ необходимо учитывать
постоянные сроки. Когда $d_{nn}=0$ и $b_n\ne 0$, мы имеем уравнение
вида $0=k$, где $k\ne 0$, и решения нет. Когда
$d_{nn}=0$ и $b_n=0$, у нас есть строка со всеми нулями. Однако,
решения по-прежнему может не быть, потому что одно из предыдущих уравнений
может по-прежнему иметь вид $0=k$, где $k\ne0$. Однако мы можем
говорят, что если таких строк нет, то имеем разрешимую систему с
хотя бы одна свободная переменная, а количество решений бесконечно.
(Таким образом, линейная система, матрица коэффициентов которой
квадратная невырожденная матрица всегда будет иметь единственное решение.)
В случае $d_{nn}=0$ необходимо учитывать
постоянные сроки. Когда $d_{nn}=0$ и $b_n\ne 0$, мы имеем уравнение
вида $0=k$, где $k\ne 0$, и решения нет. Когда
$d_{nn}=0$ и $b_n=0$, у нас есть строка со всеми нулями. Однако,
решения по-прежнему может не быть, потому что одно из предыдущих уравнений
может по-прежнему иметь вид $0=k$, где $k\ne0$. Однако мы можем
говорят, что если таких строк нет, то имеем разрешимую систему с
хотя бы одна свободная переменная, а количество решений бесконечно.
(назад к содержанию)
Система линейных уравнений | Реальная статистика с использованием Excel
Определение 1 : набор из N Линейные уравнения
в K Неизвестные x J можно просматривать как уравнение матрицы AX = C 444444444444444444444443 гг. — это матрица n × k [ a ij ], X — вектор-столбец k × 1 [ x j ] и C — вектор-столбец n × 1 [ c j ].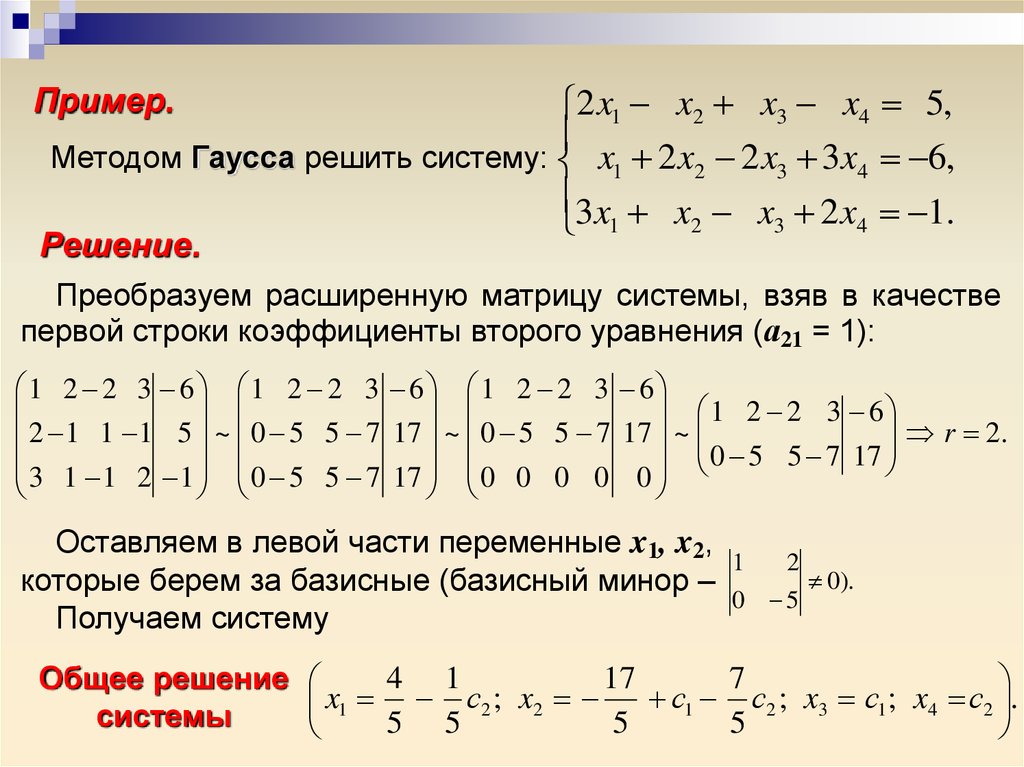
Свойство 1 : Если A является квадратной матрицей (т. е. количество уравнений равно количеству неизвестных), уравнение AX = C имеет единственное решение тогда и только тогда, когда A обратимо (т.е. det A ≠ 0), и в этом случае единственное решение дается выражением X = A -1 C.
Свойство 2 ( Правило Cramer’s ): если квадратная матрица A неверно, уникальное решение AX = C дается
, где A J IS A 4 с J — A с J . j -й столбец заменен на записи C .
Пример 1 : Решите следующую линейную систему с помощью правила Крамера:
0052 j за каждый j . Рис. 1. Вычисление определителя по правилу Крамера = 0.
Для свойства 1 мы можем получить тот же результат, вычислив A -1 C , что можно выполнить в Excel по формуле =МУМНОЖ(МИНВЕРС( A ), C ) . Для примера 1 это дает
Для примера 1 это дает
Определение 2 : Когда C из определения 1 не является нулевой матрицей, то линейные уравнения называются гетерогенными . Когда C = Ο , линейные уравнения называются однородными . В этом случае Ο является решением AX = Ο , называемым тривиальным решением .
Свойство 3 : Если A обратимо, то X = Ο является единственным решением АХ = Ο .
Доказательство: это следует из свойства 1.
Наблюдение : Когда A необратимо (т. е. det A = 0), любой скаляр, кратный нетривиальному решению однородного уравнения также является решением. Чтобы найти такое решение, мы можем использовать метод исключения Гаусса, метод, аналогичный тому, который мы использовали для вычисления определителя квадратной матрицы на основе свойства 5 определителей и линейных уравнений. Этот подход работает для любых A (независимо от того, квадратный он или нет, обратимый или нет).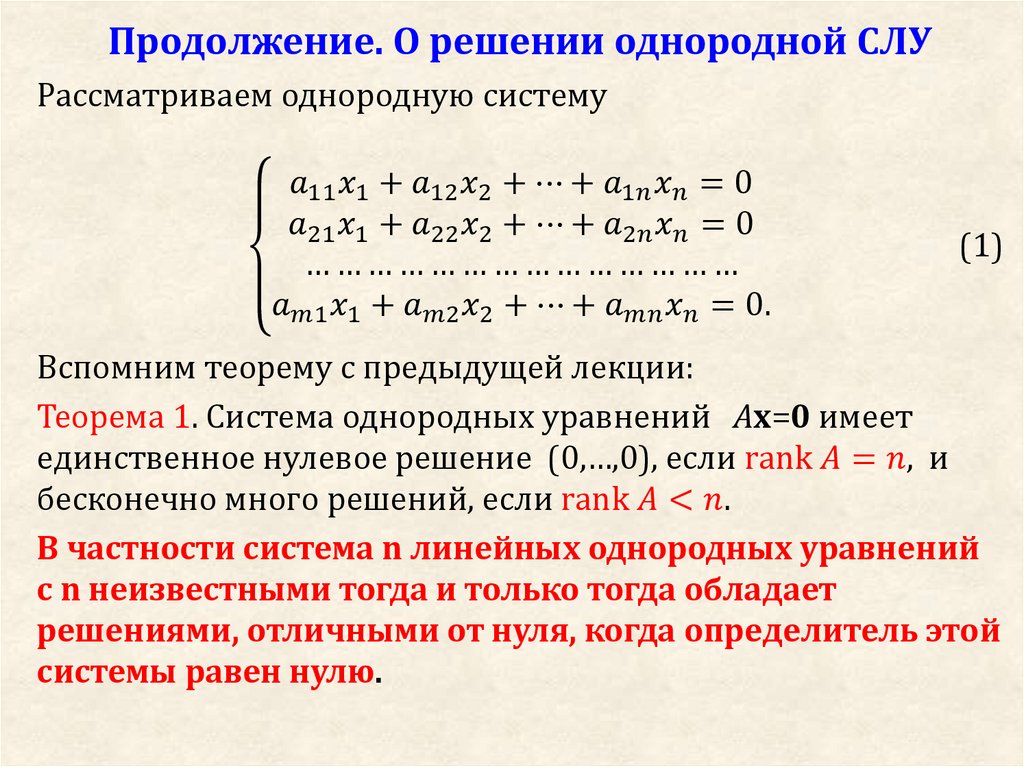
Определение 3 : если A — N × K , а B — N × M MATRIX, затем Augmented Matrix 444444444444. Затем матрица Augmented 444444444444444444444444444. B — это n × ( k + m ) матрица, первые k столбцов которой идентичны столбцам в A , а остальные m столбцов идентичны столбцам в Б .
Свойство 4 : Если A’ и C’ получены из A и C на основе любого из следующих преобразований, то уравнения AX = A’X и C′ имеют такие же решения.
- Замена любых двух рядов
- Умножение любой строки на константу
- Добавление любой строки, умноженной на константу, к другой строке
Наблюдение : Обычно мы применяем вышеуказанные преобразования к расширенной матрице A | С .
Определение 4 : Метод исключения Гаусса представляет собой способ решения линейных уравнений и основан на преобразованиях, описанных в свойстве 9.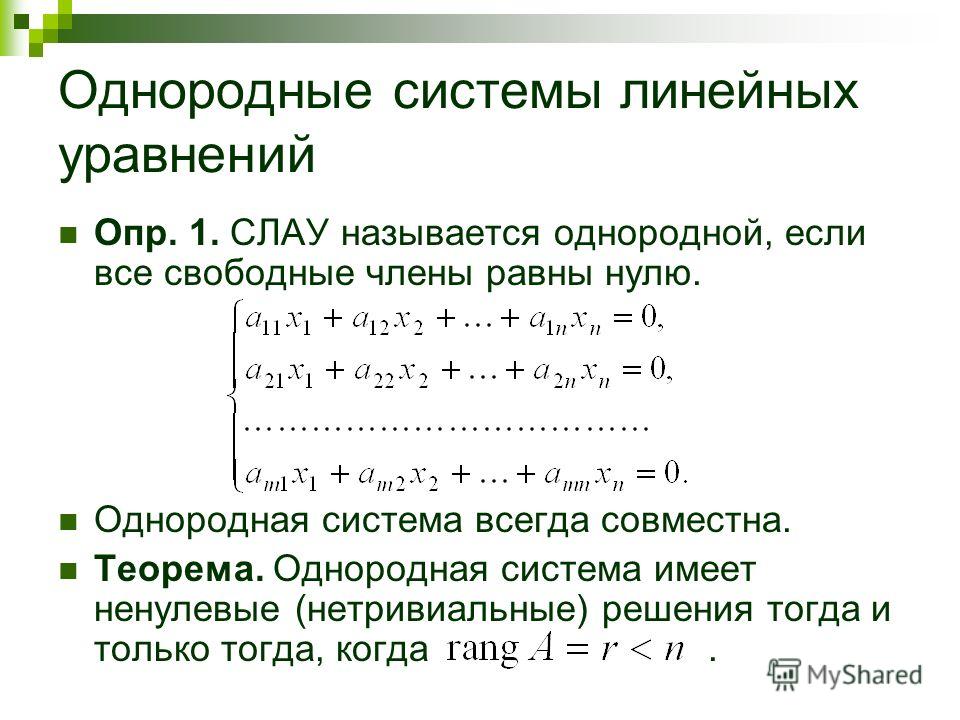 Предположим, что A и C такие, как описано в определении 1.
Предположим, что A и C такие, как описано в определении 1.
– установить i = 1 и j = 1
Теперь мы применяем следующую серию преобразований к расширенной матрице (шаги 1– P , где P — меньше N и K ):
Шаг I — Часть 1: Найдите R ≥ I , так что абсолютное значение A RJ , так что абсолютное значение A RJ 444444444444444444444444444444444444444444444444444. Такое, что абсолютное значение A RJ 444444444444444444444. самый большой. Если a rj ≈ 0 (т.е. | a rj | < ϵ, где ϵ — некоторое предопределенное малое значение), то если j = n завершить процедуру; в противном случае замените j на j + 1 и повторите шаг i. Если не a rj ≈ 0 и r > k , затем поменять местами строки r и i (правило 1).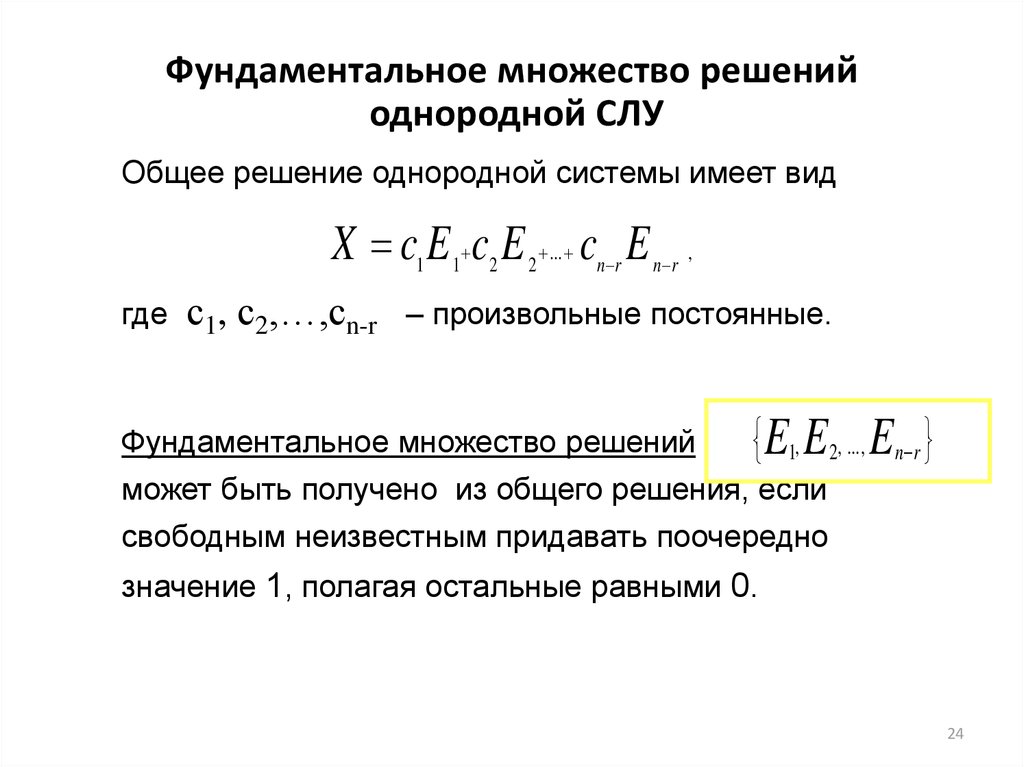
Шаг i – часть 2: разделите все записи в строке i на a ij (правило 2).
Шаг i — часть 3: для каждой строки r ниже строки i добавить — a rj умножить на строку i до строки r). Это гарантирует, что a rc = 0 для всех r > i и c ≤ j .
Наблюдение : Для неоднородных уравнений (т. е. C ≠ Ο ) есть три возможности: существует бесконечное число решений, нет решений или существует единственное решение. Для однородных уравнений (т. е. C = Ο ) возможны две возможности: существует бесконечное число решений или существует единственное решение, а именно тривиальное решение, где х = Ο .
Пример 2 : Решите следующую линейную систему с помощью исключения Гаусса:
На рис. 2 показаны этапы процесса исключения Гаусса для примера 2.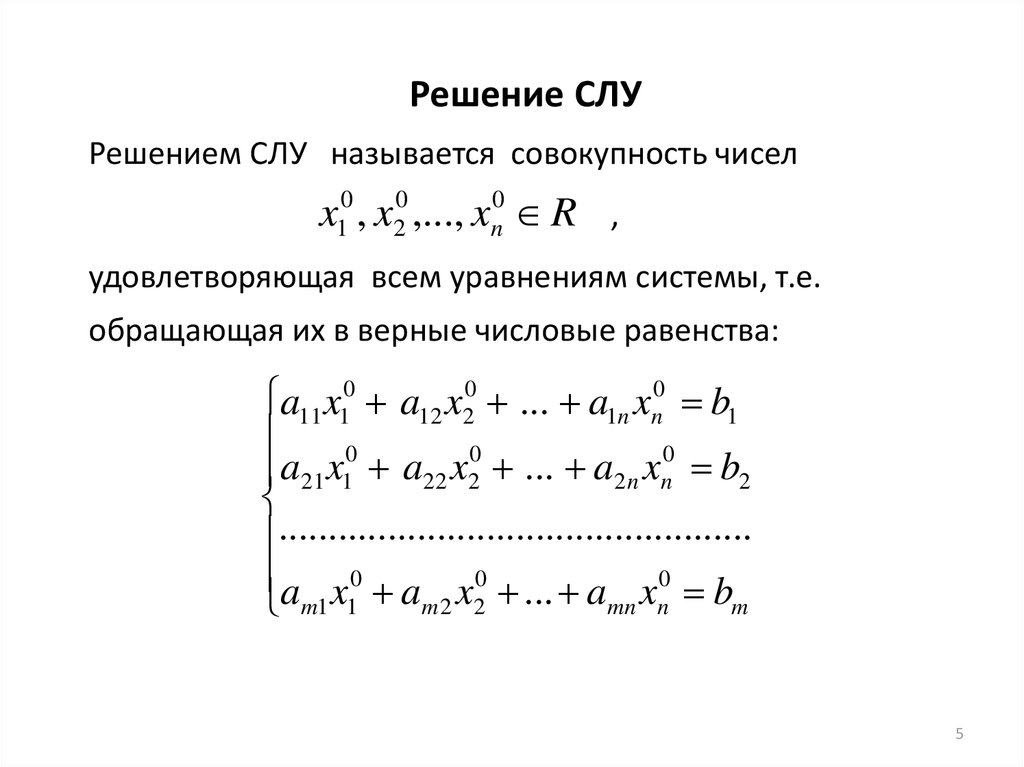
A преобразуется в единичную матрицу, мы знаем, что преобразование C является единственным решением системы линейных уравнений, а именно x = 0, y = 2 и z = -1. Обратите внимание, что мы получаем тот же результат, вычисляя X = A -1 C . Пример 3
Пример 4 : Решите следующую однородную линейную систему методом исключения Гаусса:
На этот раз метод исключения Гаусса дает строку со всеми нулями (см. рис. 4), а число ненулевых строк = 2 < 3 неизвестных. Таким образом, существует бесконечное множество решений.
Рисунок 4 -Поиск решений для гомогенных линейных уравнений
Решения могут принимать форму x = -2,5 T , y = .5 T , Z = T 4 для любого , Z = T 44 для любого , Z = T 44 для любого стоимость т .
Наблюдение : Как видно из вышеприведенных примеров, однородное уравнение AX = O , где A — матрица размером m × n , имеет единственное решение, когда после него имеется n ненулевых строк. выполнение исключения Гаусса. В противном случае уравнение имеет бесконечное число решений.
выполнение исключения Гаусса. В противном случае уравнение имеет бесконечное число решений.
Реальные статистические функции Excel : Для выполнения процедуры исключения Гаусса предусмотрены следующие функции массива.
ЭЛИМ (R1, prec ): функция массива, которая выводит результаты исключения Гаусса для расширенной матрицы, найденной в массиве R1. Форма выхода такая же, как форма R1.
LINEQU (R1, prec ): функция массива, которая возвращает вектор-столбец n × 1 с уникальным решением уравнений, определяемых расширенной m × ( n +1) матрицей, найденной в массив R1; возвращает вектор, состоящий из #N/A! если решения нет и вектор, состоящий из #ЧИСЛО! если существует бесконечное число решений.
По умолчанию каждая из этих функций предполагает, что запись с абсолютным значением меньше 0,0001 эквивалентна нулю. Это необходимо, поскольку малые значения не обрабатываются как нуль в алгоритме исключения Гаусса, описанном выше.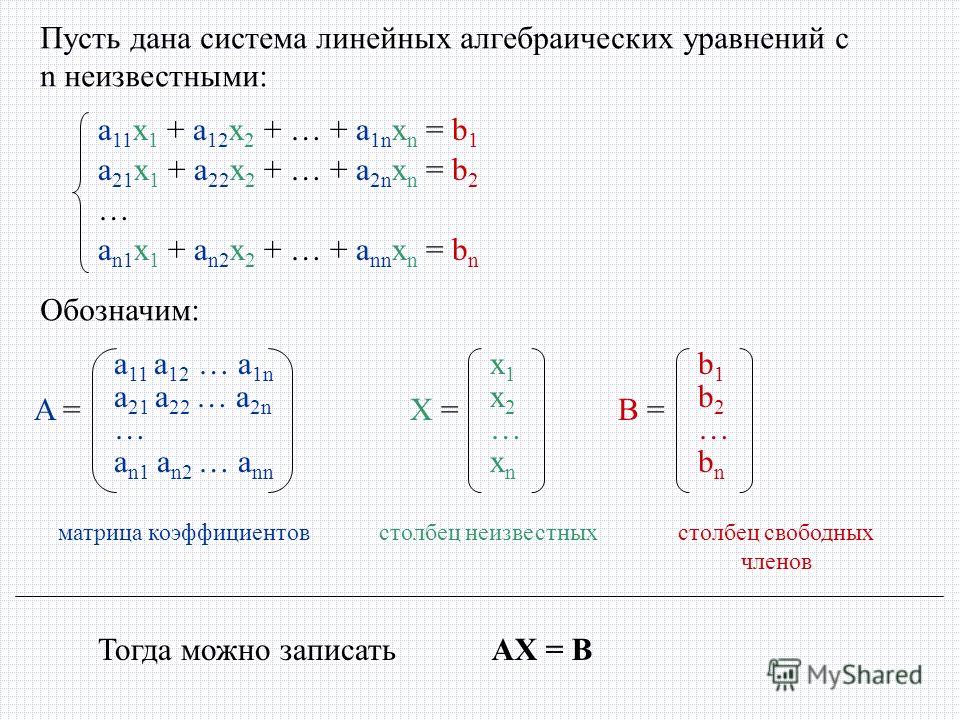 Вы можете изменить это значение по умолчанию на другое, вставив второй параметр в любую из этих функций: например. ELIM(R1, prec ) или LINEQU(R1, prec ). Таким образом, ELIM(R1) = ELIM(R1, 0,0001).
Вы можете изменить это значение по умолчанию на другое, вставив второй параметр в любую из этих функций: например. ELIM(R1, prec ) или LINEQU(R1, prec ). Таким образом, ELIM(R1) = ELIM(R1, 0,0001).
Инструмент анализа данных реальной статистики : Инструмент анализа данных «Решение набора линейных уравнений », содержащийся в пакете ресурсов Real Statistics, обеспечивает функциональные возможности, эквивалентные LINEQU и ELIM. Чтобы использовать этот инструмент, введите Ctrl-m и выберите в меню Решить набор линейных уравнений . Когда появится диалоговое окно, заполните Диапазон ввода (с тем же диапазоном, что и R1 выше). Выбор Показать решение только эквивалентен LINEQU(R1), а отсутствие выбора этого параметра эквивалентно ELIM(R1).
Наблюдение : Исключение Гаусса также можно использовать для обращения квадрата n × n матрицы A , применяя описанную выше процедуру к A | I п .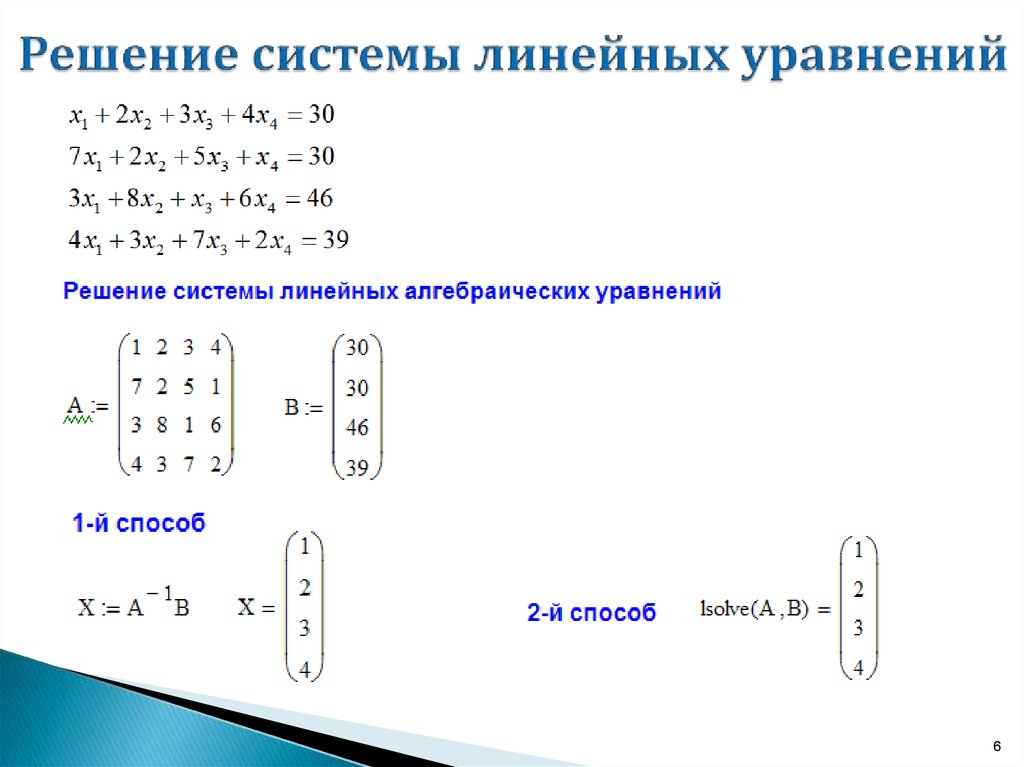 Если процедура завершится до того, как будет выполнено n шагов, то A необратима. Если процедура завершается после n шагов (в этом случае A′ = I n ), то C′ = A -1 .
Если процедура завершится до того, как будет выполнено n шагов, то A необратима. Если процедура завершается после n шагов (в этом случае A′ = I n ), то C′ = A -1 .
Пример 5: Использование исключения Гаусса для инвертирования матрицы
Результат показан на рисунке 5.
единичная матрица указывает, что A обратимо. Обратное получается преобразованием единичной матрицы, а именно
. Это тот же результат, что и при использовании формулы Excel MINVERSE( А ).
Наблюдение : Как мы видели в примере 4, иногда существует бесконечное число решений системы линейных уравнений, каждое из которых выражается как кратное одному решению. Как правило, при наличии нескольких решений каждое решение может быть выражено в виде линейной комбинации векторов-столбцов, как более подробно описано в разделе «Множественные решения линейных уравнений».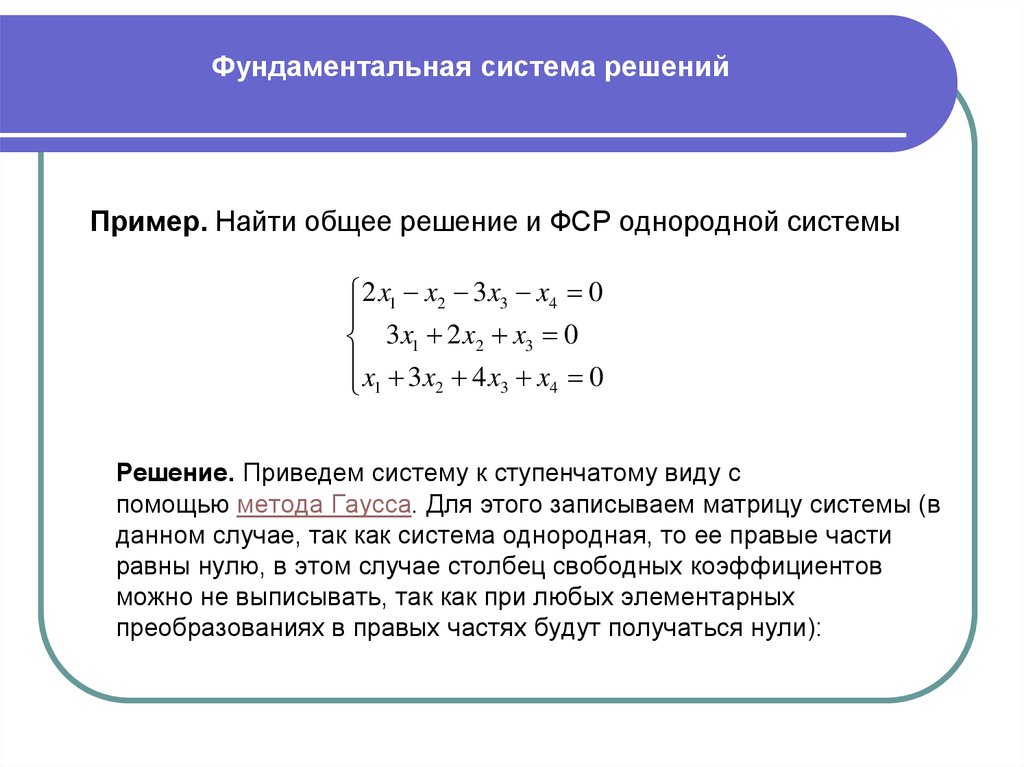
Решение системы линейных уравнений в Excel (в простых шагах)
В этом примере показано, как решить систему линейных уравнений в Excel . Например, у нас есть следующая система линейных уравнений:
| 5x | + | 1 год | + | 8з | = | 46 |
| 4x | — | 2 года | = | 12 | ||
| 6x | + | 7 лет | + | 4з | = | 50 |
В матричной записи это можно записать как AX = B
| 5 | 1 | 8 | х | 46 | |||||||||||
| с А = | 4 | -2 | 0 | , | х = | и | , | Б = | 12 | ||||||
| 6 | 7 | 4 | из | 50 |
Если A -1 (обратное A) существует, мы можем умножить обе части на A -1 , чтобы получить X = A -1 B.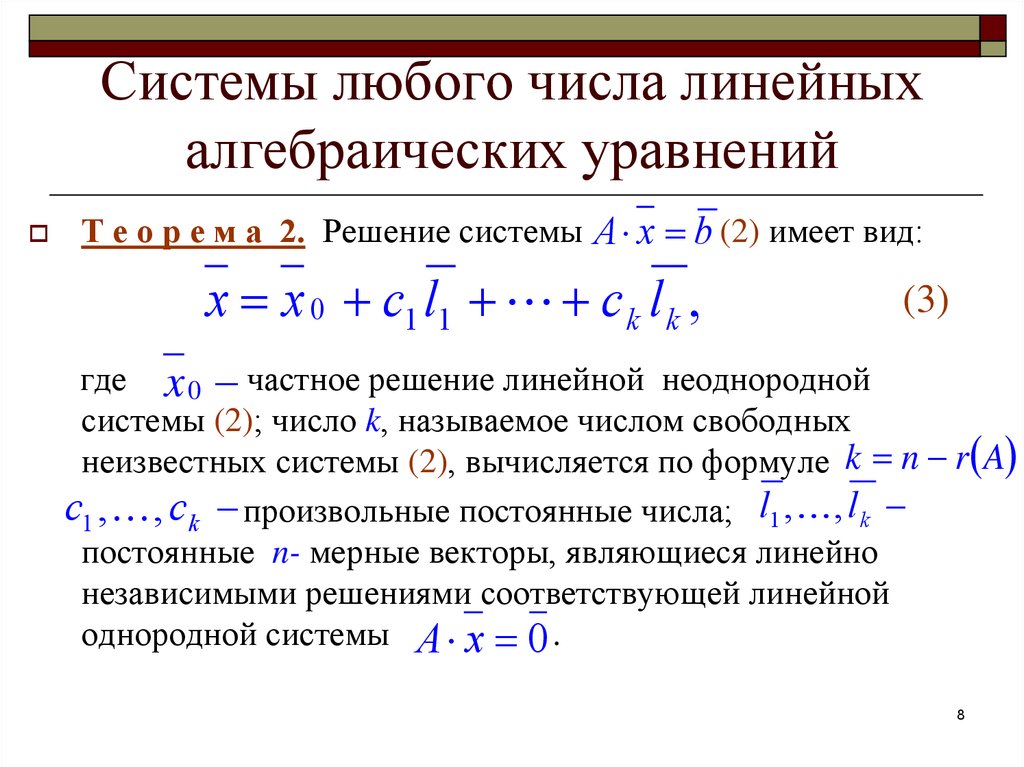 Чтобы решить эту систему линейных уравнений в Excel, выполните следующие шаги.
Чтобы решить эту систему линейных уравнений в Excel, выполните следующие шаги.
1. Используйте функцию MINVERSE, чтобы получить обратную матрицу A. Сначала выберите диапазон B6:D8. Затем вставьте функцию MINVERSE, показанную ниже. Завершите, нажав CTRL + SHIFT + ENTER.
Примечание: строка формул указывает на то, что ячейки содержат формулу массива. Таким образом, вы не можете удалить один результат. Чтобы удалить результаты, выберите диапазон B6:D8 и нажмите Delete.
2. Используйте функцию МУМНОЖ, чтобы получить произведение матрицы A -1 и B. Сначала выберите диапазон G6:G8. Затем вставьте функцию МУМНОЖ, показанную ниже. Завершите, нажав CTRL + SHIFT + ENTER.
3. Соберите все вместе. Сначала выберите диапазон G6:G8. Затем вставьте формулу, показанную ниже. Завершите, нажав CTRL + SHIFT + ENTER.
4. Если у вас Excel 365 или Excel 2021, просто выберите ячейку G6, введите ту же формулу, что и выше, и нажмите Enter.