
Системы линейных уравнений. Ранг матрицы
Похожие презентации:
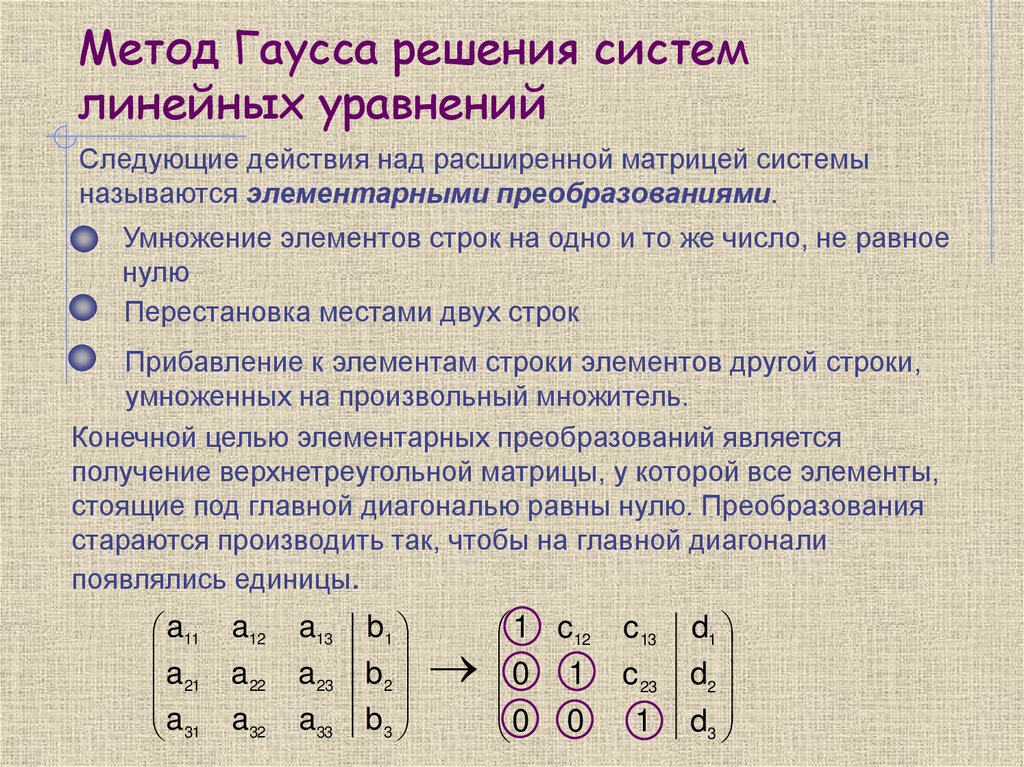
Метод Гаусса решения систем линейных уравнений. Ранг матрицы. Исследование систем линейных уравнений
Линейная алгебра. Ранг матрицы. (Тема 2)
Линейная алгебра. Ранг матрицы. Метод Гаусса решения систем линейных уравнений. Лекция 5
Решение систем линейных алгебраических уравнений
Системы линейных алгебраических уравнений
Ранг матрицы
Системы линейных уравнений. Метод Гаусса. (Тема 9.2)
Системы из n линейных уравнений с n неизвестными. Метод Гаусса решения систем линейных уравнений
Системы линейных уравнений
Матрицы, операции над матрицами, теорема существования обратной матрицы. Матричная запись систем линейных уравнений
1. Исследование систем линейных уравнений.
Ранг матрицыСистема m линейных уравнений с n
переменными имеет вид:
a11 x1 a12 x2 … a1n xn b1
a x a x … a x b
21 1 22 2
2n n
2
.
 ………………………………….
………………………………….am1x1 am 2 x2 … amn xn bm
aij
bi
— коэффициенты системы,
— свободные члены.
Решением системы называется такая
совокупность значений, при подстановке которых
каждое уравнение системы обращается в верное
равенство.
Система линейных уравнений называется:
совместной, если она имеет хотя
бы одно решение;
несовместной, если она не имеет
решений;
определенной, если она имеет
единственное решение;
неопределенной, если она имеет
более одного решения;
однородной, если все bi=0;
неоднородной, если не все bi=0.
5. Исследование систем линейных уравнений
Теорема Кронекера — Капелли. Для того, чтобы системалинейных алгебраических уравнений была совместна (имела
решение), необходимо и достаточно, чтобы ранг расширенной
матрицы системы равнялся рангу матрицы коэффициентов:
r ( Ap ) r ( A)
r ( Ap ) r ( A) , то система несовместна (не
Если
имеет решений).
r ( Ap ) r ( A) n
Если
(числу неизвестных), то система
совместна и определенна (имеет единственное решение).
r ( Ap) r ( A) n
Если
, то система совместна
неопределенна (имеет бесконечное множество решений):
и
Рангом матрицы А называется
наивысший порядок отличных от нуля
миноров этой матрицы
Ранг матрицы А обозначается rang A
или r(A).
Алгоритм нахождения ранга способом
перебора миноров:
1.При наличии хотя бы одного элемента,
отличного от нуля, то ранг матрицы как
минимум равен единице (т.к. есть минор
1-го порядка, который не равен нулю).
2.Далее следует перебор миноров 2-го
порядка. Если все миноры 2-го порядка
равны нулю, то ранг равен единице. При
существовании хотя бы одного не
равного нулю минора 2-го порядка,
необходимо перейти к перебору миноров
3-го порядка, а ранг матрицы, в таком
случае, будет равен минимум двум. И
так далее, по аналогии.
2 3 4 5
A 0 2 3 1
0 2 2 4
12 миноров 1 — го порядка – сами элементы.

18 миноров 2 — го порядка, например:
2
3
0 2
4
2
Матрица А имеет 4 минора 3 — его порядка,
например:
Наибольший порядок отличного от нуля минора
этой матрицы равен 3, поэтому: r( A ) 3
3
4
0 2 3 20
0
2
2
Ранг матрицы можно найти:
• по определению
• методом окаймляющих миноров
• методом Гаусса (с помощью
элементарных преобразований)
Нахождение ранга матрицы методом Гаусса
— метод, который основывается на теории
эквивалентности матриц: если матрица В
получена из матрицы А при помощи
конечного числа элементарных
преобразований, то r(A) =r(B).
Теорема.
Эквивалентные (элементарные)
преобразования не меняют ранга матриц
Суть метода элементарных преобразований:
привести матрицу ,чей ранг необходимо найти,
к трапециевидной при помощи элементарных
преобразований.
Эквивалентные преобразования:
Умножение или деление элементов одного ряда на одно
и то же число, не равное нулю
Перестановка местами двух рядов
Прибавление к элементам ряда элементов другого
параллельного
ряда,
умноженного
на
произвольный множитель
Вычеркивание нулевого ряда
Ранг матрицы равен числу ненулевых строк матрицы,
приведенной к треугольному виду.

1 3 2
A 0 5 4 ~
1 7 6
1 3 2 ( 2)
~
0 5 4
0 10 8
1 3 2
0 5 4
0 0 0
r ( A ) 2
Алгоритм исследования СЛАУ
1.Записываем расширенную матрицу
системы и с помощью элементарных
преобразований приведем ее к
ступенчатому виду.
2. Используя понятие ранга матрицы и
теоремы Кронекера-Капелли определяем
вид системы.
Бесконечное множество решений:
r ( Ap) r ( A) n
Система имеет r базисных переменных и n – r свободных
переменных.
Общее решение системы запишется в виде:
x1(t1,…, tn r )
…
xr (t1,…, tn r )
X
t1
…
tn r
Базисные переменные,
зависящие от свободных
переменных
Свободные
переменные
t1 x r 1; t 2 x r 2 ; t n r x n
Пример. Решить систему:
Решение
x1
x2
x3
2 x1 2 x2 2 x3 4
x x x 0
1
2
3
3 x1 3 x2 x3 2
x1 x2 3 x3 2
2
:
2
2 2 2 4
1
1
1
2
( 3) 1 1 1
2 2 V
A p 1 1 1 0 ~ 1 1 1 0 V
0 0 2 2
3 3 1 2
~
0 0 4 4
3 3 1 2
~
1 1 3 2
0 0 4
4
1
1
3
2
x1 x2 x3
2
1 1 1
2
1 1 1
r ( Ap) r ( A) 2 совместна
0 0 2 2
0 0 — 2 2
0 0 0
0
r ( Ap ) n неопределенна
0
0 0 0
2 базисных переменных, т.
 к. r 2 например, x1 , x3
к. r 2 например, x1 , x31 свободная переменная, т.к. n r 3 2 1 например, x2 t
Восстановим систему:
x1 1 t
x
2
t
x
1
t
x
t
x
2
1
1
3
3
x2 t
2
x
2
x
1
3
3
x 1
3
16. Однородные системы линейных уравнений
a11 x1 a12 x2 a1n xn 0a x a x a x 0
21 1
22 2
2n n
am1 x1 am 2 x2 amn xn 0
Однородная система всегда имеет решение:
x1 0 x2 0 xn 0
— тривиальное решение.
Оно является единственным решением системы в случае, когда
Если r ( A)
решений.
n , то система имеет бесконечное множество
Решить однородную систему уравнений:
x1 x2 5 x3 7 x4 0
2 x1 x2 4 x3 x4 0
3 x 2 x x 6 x 0
1
2
3
4
1 1 5 7
0 1 14 15
0 1 14 15
1 1 5 7
0 1 14 15
n r 4 2 2
1 1 5 7
1
2 1 4
3 2 1 6
~
1 1 5 7
0 1 14 15
0 0
0
0
r ( A) 2
n 4
( 2)
( 3)
~
( 1)
~
множество решений
— число свободных переменных
English Русский Правила
геометрия — матрица преобразования 2D для создания трапеции из прямоугольника
спросил
Изменено 3 года, 7 месяцев назад
Просмотрено 11 тысяч раз
$\begingroup$
В большинстве библиотек векторной графики я могу использовать матрицы (3×3) для преобразования 2D-геометрии (например, масштабирование, поворот, наклон).
- геометрия
- матрицы
$\endgroup$
$\begingroup$
Существует своего рода трансформация, которая нелинейна, но проста и подходит для работы. Он позволяет преобразовать единичный квадрат в произвольный четырехугольник.
$$\pmatrix{x’\\y’} = \pmatrix{u_x&v_x&w_x\\u_y&v_y&w_y}\pmatrix{x\\y\\xy}$$
$$x’=u_xx+v_xy+w_xxy\\ y’=u_yx+v_yy+w_yxy$$
Он преобразует единичный квадрат способом, контролируемым векторами $u=(u_x,u_y), v=(v_x,v_y), w=(w_x,w_y)$, как следует:
Однако обратите внимание, что это не перспективное преобразование.
$\endgroup$
$\begingroup$
Если вы ищете преобразование, определяемое умножением на матрицу 2×2, то, боюсь, это невозможно сделать. Такое преобразование является линейным, поэтому отображает вектор в один и тот же вектор независимо от его начальных точек. Другими словами, если точки $A,B,C,D$ на плоскости такие, что $\vec{AB}=\vec{CD}$, и $A’,B’,C’,D’$ их соответствующие образы при этом преобразовании, то мы также имеем $\vec{A’B’}=\vec{C’D’}$.
Такое преобразование является линейным, поэтому отображает вектор в один и тот же вектор независимо от его начальных точек. Другими словами, если точки $A,B,C,D$ на плоскости такие, что $\vec{AB}=\vec{CD}$, и $A’,B’,C’,D’$ их соответствующие образы при этом преобразовании, то мы также имеем $\vec{A’B’}=\vec{C’D’}$.
Таким образом, линейное преобразование преобразует любой параллелограмм в другой параллелограмм, потому что противоположные стороны параллелограмма образуют один и тот же вектор. Поскольку это неверно для трапеции, линейное преобразование не может превратить прямоугольник (= частный случай параллелограмма) в такую трапецию, которая не является также параллелограммом.
$\endgroup$
6
$\begingroup$
9T&1\end{bmatrix},$$, где $A$ — некоторая обратимая матрица $2\times2$. Поскольку, как указал Юрки Лахтонен, аффинные преобразования могут отображать параллелограммы только в другие параллелограммы, вам понадобится преобразование другого типа. Если допустить, что последняя строка $M$ не кратна $(0,0,1)$, результирующая матрица представляет собой проективное преобразование плоскости. Точно так же, как существует аффинное преобразование, отображающее любую данную пару треугольников, оказывается, что для любой пары полных четырехугольников (никаких трех коллинеарных вершин) существует обратимое проективное преобразование, отображающее одно на другое. Этот ответ объясняет, как построить соответствующую матрицу, но любая достойная библиотека двумерной графики предоставляет для этого встроенную функцию. Это может быть вычисление отображения между единичным квадратом и произвольным четырехугольником, и в этом случае вам нужно составить два из этих более примитивных проективных преобразований, чтобы получить то, которое вы хотите.
Если допустить, что последняя строка $M$ не кратна $(0,0,1)$, результирующая матрица представляет собой проективное преобразование плоскости. Точно так же, как существует аффинное преобразование, отображающее любую данную пару треугольников, оказывается, что для любой пары полных четырехугольников (никаких трех коллинеарных вершин) существует обратимое проективное преобразование, отображающее одно на другое. Этот ответ объясняет, как построить соответствующую матрицу, но любая достойная библиотека двумерной графики предоставляет для этого встроенную функцию. Это может быть вычисление отображения между единичным квадратом и произвольным четырехугольником, и в этом случае вам нужно составить два из этих более примитивных проективных преобразований, чтобы получить то, которое вы хотите. Обратите внимание, что когда однородные координаты точки на плоскости рассматриваются как точки в трехмерном пространстве, все эти преобразования являются линейными . Это одно из привлекательных свойств работы с однородными координатами: большой класс интересных преобразований может быть представлен в виде матриц, композиция становится умножением матриц и так далее.
$\endgroup$
преобразование — Получение двумерного линейного пространства на форме трапеции
«Правильный» метод зависит от того, что вы в конечном итоге пытаетесь сделать. Есть две разумные интерпретации: вы хотите отобразить единичный квадрат на эту трапецию или что вы собираетесь создать равномерную сетку на трапеции с помощью прямой линейной интерполяции в обоих направлениях, а затем, возможно, отобразить ее обратно на единичный квадрат.
Барицентрический метод, который вы нашли в этом ответе, является хорошей техникой. Другой подход состоит в том, чтобы вычислить преобразование плоской перспективы, которое сопоставляется между единичным квадратом и трапецией, и использовать его для отображения точек.
Если параллельные стороны трапеции параллельны оси $x$, эта матрица преобразования довольно проста. Пусть нижний левый угол находится в начале координат, нижняя и верхняя ширина равны $w_b$ и $w_t$ соответственно, а верхний левый угол находится в точке $(x_t,h)$. Затем, если вы выполните вычисления во второй ссылке выше, многие термины исчезнут, и у вас останется $$A=\pmatrix{w_b&{w_b\over w_t}x_t&0\\0&{w_b\over w_t} h&0\\0&{w_b-w_t\over w_t}&1}$$ для матрицы, отображающей единичный квадрат на трапецию, что преобразуется в отображение $$(x,y)\mapsto\left({w_b\over ( 1-y)w_t+yw_b}(w_tx+x_ty),{w_b\over(1-y)w_t+yw_b}hy\right).\tag{*}$$ Это выглядит правдоподобно: знаменатель линейно интерполируется между верхними и ширины дна и зависит только от $y$. Полученная координата $y$ также не зависит от $x$. При фиксированном $y$ координаты $x$ в трапеции смещаются пропорционально преобразованной координате $y$ и равномерно масштабируются по ширине трапеции на этой высоте.