
определения, типы и примеры • BUOM
29 апреля 2021 г.
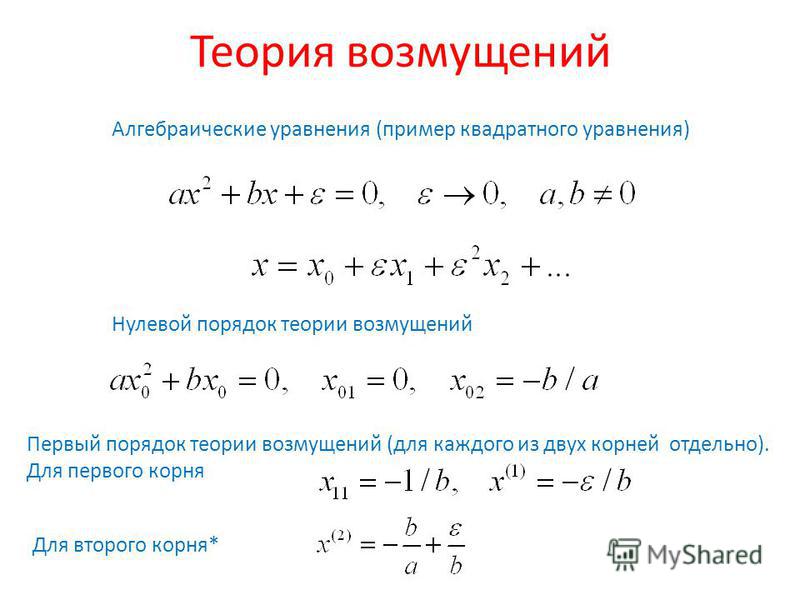
При решении алгебраических уравнений некоторые типы уравнений встречаются чаще, чем другие. Вам может быть полезно определить тип уравнения, над которым вы работаете, чтобы вы могли определить свойства этого уравнения. Знание конкретных свойств типа уравнений, которые вы решаете, может помочь вам решить проблему. В этой статье мы обсудим, что такое уравнения, почему они важны, терминологию уравнений, различные типы уравнений, основные категории уравнений и примеры уравнений.
Что такое уравнение?
Уравнение — это математическое выражение, которое устанавливает значение двух выражений равными друг другу. Другими словами, это математическое предложение, которое говорит: «это равно тому». Это выглядит как математическое выражение слева, знак равенства посередине и математическое выражение справа. Очень часто правильный ход уравнения равен нулю.
Вот несколько примеров простых и более сложных уравнений:
Программы для Windows, мобильные приложения, игры — ВСЁ БЕСПЛАТНО, в нашем закрытом телеграмм канале — Подписывайтесь:)
3 + 5 = 4 + 4.
dy/dx + x5y = x5y7
20х2 — 17х — 63 = 0
Когда вы решаете уравнение с переменными, вы определяете, какое значение должны иметь переменные, чтобы уравнение было верным. Как только вы найдете значение переменных, и переменные удовлетворяют уравнению, что делает его истинным, это называется решением. Уравнения тождества верны для всех значений переменной. Условные уравнения верны только для определенных значений переменной.
Почему уравнения важны?
Хотя это может быть неочевидно, математические уравнения являются важной частью современного мира. Без уравнений не было бы многих современных изобретений, которыми вы пользуетесь каждый день, таких как компьютеры, телевизоры, спутники и GPS. Математические уравнения также необходимы во многих отраслях, таких как экономика, медицина, инженерия, физика и информатика, и это лишь некоторые из них. Есть даже несколько известных уравнений, которые сильно повлияли на то, как вы живете. Вот некоторые примеры:
Теорема Пифагора: Это уравнение, a2 + b2 = c2, является ядром геометрии, основой тригонометрии и связующим звеном с алгеброй.
 Благодаря этому существует картографирование, точная геодезия и навигация. Он до сих пор используется для триангуляции для точного определения местоположения с помощью GPS-навигации.
Благодаря этому существует картографирование, точная геодезия и навигация. Он до сих пор используется для триангуляции для точного определения местоположения с помощью GPS-навигации.Универсальный закон всемирного тяготения Ньютона: это уравнение F = G (m1m2/d2) используется для описания того, как функционирует мир, и имеет важное значение для понимания того, как взаимодействуют объекты. Он до сих пор используется для проектирования орбит, спутников, зондов и оптимальных траекторий для запуска космических миссий.
Происхождение комплексных чисел: это уравнение, i2 = -1, важно для создания большинства современных технологий, и без него не было бы многих изобретений. Он до сих пор используется для таких вещей, как цифровые камеры, проектирование, самолеты, комплексный анализ и математическая теория.
Теория относительности Эйнштейна. Это уравнение E = mc2, пожалуй, самое известное уравнение во всей истории, поскольку оно полностью изменило взгляд на реальность и материю.
Он до сих пор используется с ядерным оружием и глобальными системами позиционирования.Теория информации Шеннона: Это уравнение, H = — ∑ p(x) log p(x), привело к веку информации, и инженеры используют его практически для всего, что связано с обнаружением ошибок при кодировании. Он все еще используется сегодня от компакт-дисков до цифровой связи с Интернетом.
 Благодаря этому существует картографирование, точная геодезия и навигация. Он до сих пор используется для триангуляции для точного определения местоположения с помощью GPS-навигации.
Благодаря этому существует картографирование, точная геодезия и навигация. Он до сих пор используется для триангуляции для точного определения местоположения с помощью GPS-навигации. Он до сих пор используется с ядерным оружием и глобальными системами позиционирования.
Он до сих пор используется с ядерным оружием и глобальными системами позиционирования.Терминология уравнений
Чтобы понимать математические уравнения, вам также необходимо понимать термины, используемые для их описания и объяснения. При обсуждении алгебраических уравнений вы часто используете следующие математические термины:
Выражение: числа, символы и знаки операций, сгруппированные вместе для отображения значения.
Функция: математическая зависимость, в которой каждый вход имеет один выход.
Независимая переменная: входное значение функции.
Зависимая переменная: выходное значение функции
Переменная: символ, представляющий неизвестное значение, обычно это буква, например x или y.
Термин: одно число или переменная или несколько чисел и переменная, умноженные вместе.
Константа: фиксированное значение, такое как целое число, иногда представленное буквой.
Коэффициент: число, используемое для умножения переменной, часто появляющееся перед переменной.
Показатель степени: число, обозначающее операцию возведения основного числа в степень.
Типы алгебраических уравнений
Вот наиболее распространенные типы алгебраических уравнений:
Экспоненциальные уравнения: переменные заменяют показатели степени.
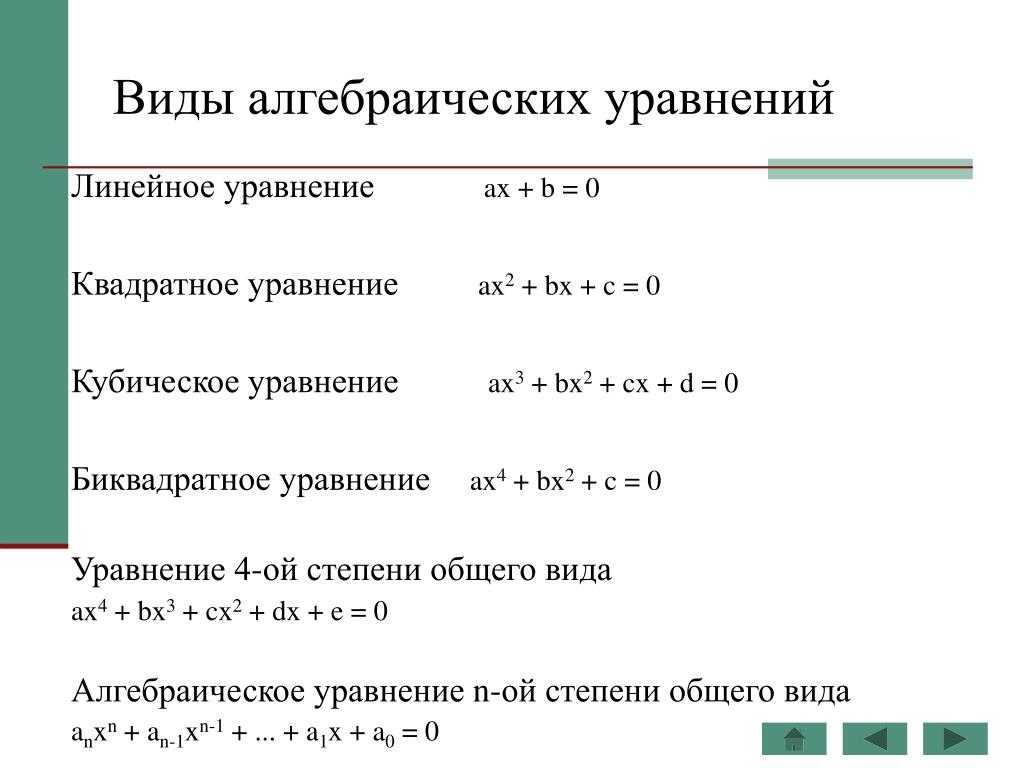
Линейные уравнения: каждый член является константой или произведением константы и одной переменной.
Логарифмические уравнения: логарифм всегда влияет на неизвестное.
Полиномиальные уравнения: Термины содержат неопределенности и коэффициенты или переменные.
Иррациональные полиномиальные уравнения: существует по крайней мере один многочлен под знаком радикала.
Квадратные уравнения: одна переменная содержит другую переменную с показателем степени два.
Кубические уравнения: наибольшая сумма переменных показателей в любом члене равна трем.
Уравнения четвертой степени: наибольшая сумма переменных показателей в любом члене равна четырем.
Уравнения пятой степени: наибольшая сумма переменных показателей в любом члене равна пяти.
Радикальные уравнения: Максимальный переменный показатель степени равен 12 и более одного члена.
Рациональные уравнения: Существуют рациональные выражения.
Трансцендентные уравнения: существуют трансцендентные функции.
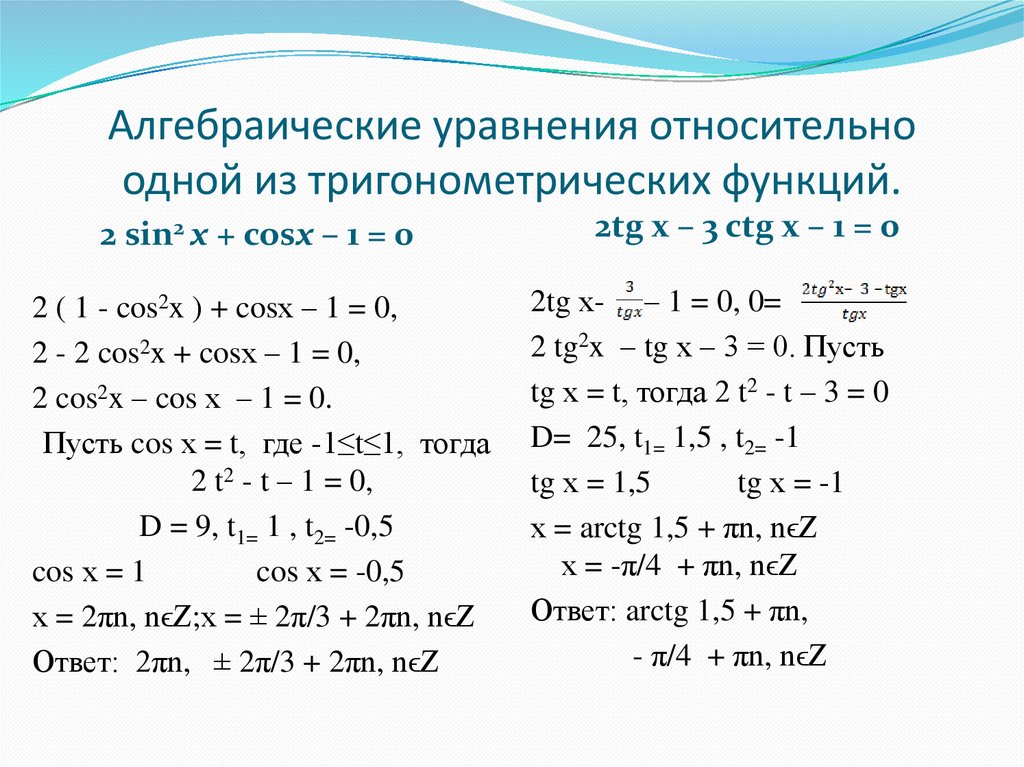
Тригонометрические уравнения: существуют тригонометрические функции.
Основные категории алгебраических уравнений
Существует пять основных категорий алгебраических уравнений, каждая из которых имеет разные ожидаемые входные данные и приводит к результату с различной интерпретацией. Вы можете различать каждую из пяти категорий по положению переменной, поведению их графиков и типам используемых функций и операторов. Вот немного о каждой из пяти алгебраических категорий:
Вы можете различать каждую из пяти категорий по положению переменной, поведению их графиков и типам используемых функций и операторов. Вот немного о каждой из пяти алгебраических категорий:
Полиномиальные уравнения
Полиномиальные уравнения имеют полиномиальное выражение по обе стороны от знака равенства. Многочлены имеют переменные члены и целые показатели степени. Вы можете классифицировать каждое полиномиальное уравнение по количеству членов в выражении:
Один член является мономом.
Два члена — биномиал.
Три члена — это трехчлен.
И так далее…
Вы также можете классифицировать каждое полиномиальное уравнение по его степени, которая является наибольшим показателем степени в выражении:
Одна степень линейна.
Две степени квадратичны.
Три градуса кубические.
И так далее…
Например, этот полином будет кубическим биномом: x3-5. И этот многочлен был бы квадратным трехчленом: у2 — у — 4.
Экспоненциальные уравнения
Показательные уравнения имеют экспоненциальное выражение по обе стороны от знака равенства. Экспоненциальные уравнения похожи на полиномиальные уравнения, за исключением того, что их показатели степени имеют переменный член. Вы можете классифицировать экспоненциальные функции как показывающие экспоненциальный рост, когда независимая переменная имеет положительный коэффициент, или показывающие экспоненциальное затухание, когда независимая переменная имеет отрицательный коэффициент. Уравнения для экспоненциального роста могут демонстрировать распространение болезней, рост населения или сложные проценты. Уравнения для экспоненциального распада могут продемонстрировать такие научные явления, как радиоактивный распад.
Например, экспоненциальное выражение может выглядеть так: x = 6(y-8) + 12.
Логарифмические уравнения
Логарифмические уравнения имеют логарифмическое выражение по обе стороны от знака равенства. Обратными показательными уравнениями являются логарифмические уравнения. Логарифмическое основание числа равно показателю степени, до которого вы возводите основание, чтобы получить число. Например, log2 числа 25 равно 5, потому что 2 в 5-й степени равно 25. Наиболее распространенной логарифмической основой является трансцендентное число «е», которое часто называют натуральным логарифмом. Во многих типах шкал интенсивности используются логарифмы, например шкала децибел для измерения звука или шкала Рихтера для измерения землетрясений. Шкала децибел имеет логарифмическую основу 10, поэтому, если звук увеличивается на один децибел, это десятикратное увеличение.
Логарифмическое основание числа равно показателю степени, до которого вы возводите основание, чтобы получить число. Например, log2 числа 25 равно 5, потому что 2 в 5-й степени равно 25. Наиболее распространенной логарифмической основой является трансцендентное число «е», которое часто называют натуральным логарифмом. Во многих типах шкал интенсивности используются логарифмы, например шкала децибел для измерения звука или шкала Рихтера для измерения землетрясений. Шкала децибел имеет логарифмическую основу 10, поэтому, если звук увеличивается на один децибел, это десятикратное увеличение.
Например, если у вас есть экспоненциальное выражение x = 4y, то обратное или логарифмическое выражение будет x = log4 y.
Рациональные уравнения
Рациональные уравнения имеют рациональное выражение по обе стороны от знака равенства. Алгебраические уравнения рациональны, когда они принимают форму b(x) / d(x), где b(x) и d(x) — полиномы. Рациональные уравнения часто имеют асимптоты, где значения x и y на графике уравнений приближаются, но никогда не достигают.
Рациональное уравнение с вертикальной асимптотой имеет значение x, которого график никогда не достигает, а значение y может либо стать отрицательным, либо положительным до бесконечности, когда значение x приближается к асимптоте. Рациональное уравнение с горизонтальной асимптотой имеет значение y, которого график никогда не достигает, а значение x может стать как отрицательным, так и положительным до бесконечности по мере того, как значение y приближается к асимптоте.
Например, рациональное выражение может выглядеть так: (у-4)/(у2 — 6у + 3).
Тригонометрические уравнения
Тригонометрические уравнения имеют тригонометрическое выражение по обе стороны от знака равенства. Тригонометрические функции tan, cos, sin cot, csc и sec находятся в тригонометрических уравнениях и описывают отношение между двумя сторонами прямоугольного треугольника. Мера угла является независимой переменной или входом, а отношение является зависимой переменной или выходом. Уникальным фактом о тригонометрических функциях является то, что они периодические, а это означает, что через определенное время их график повторяется.
Например, тригонометрическое выражение x = sin y описывает отношение противоположной стороны прямоугольного треугольника к его гипотенузе с мерой угла y.
Примеры уравнений
Вот несколько примеров алгебраических уравнений:
Пример 1
Вот уравнение, которое можно решить за один шаг:
х + 5 = 9
х = 9 — 5
х = 4
Пример 2
Вот уравнение, которое можно решить в два этапа:
3х + 4 = 16
3х = 12
х = 12/3
х = 4
Пример 3
Вот многошаговое уравнение, которое состоит из более чем двух шагов:
4х + 3 = х + 12
4х — х = 12 — 3
3х = 9
х = 9/3
х = 3
Пример 4
Вот линейное уравнение:
(2x+5) / (x+4) = 1
2х+5 = 1(х+4)
2х+5 = х+4
2х-х = 4-5
х = -1
Пример 5
Вот еще одно линейное уравнение:
х+12 = х2 -2
х2+2х+1 = х2-2
х2-х2+2х+1 = -2
2x+1 = -2
2х+4 = 0
2(х+2) = 0
х+2 = 0
х = -2
Пример 6
Вот радикальное уравнение:
√х-7 = 3
(√х-7)2 = 32
х-7 = 9
х = 16
Пример 7
Вот еще одно радикальное уравнение:
√2x-2 = x-1
(√2x-2)2 = (x-1)2
2x-2 = (x-1)(x-1)
2х-2 = х2-2х+1
0 = х2-4х+3
0 = (х-1)(х-3)
Пример 8
Вот рациональное уравнение:
5/х — 5/6 = 5/3
(6х) 5/х — 5/6 = 5/3 (6х)
30 — 5х = 10Х
(+5x) 30 — 5x = 10X (+5x)
30 = 15х
2 = х
Пример 9
Вот логарифмическое уравнение:
журнал (2x) = 4
10log(2x) = 104
2х = 104
2x = 10 000
х = 5000
Пример 10
Вот еще одно логарифмическое уравнение:
2+5log3(x-1) = 12
5log3(x-1) = 10
log3 (х-1) = 2
3log3(x-1) = 32
х-1 = 32
х-1 = 9
х = 10
Числа рациональные и иррациональные
Числа рациональные и иррациональные
ОглавлениеОт редактораВведение ГЛАВА I. Натуральные и целые числа § 1. Простые числа § 2. Единственность разложения на простые множители § 3. Целые числа § 4. Четные и нечетные целые числа § 5. Свойства замкнутости § 6. Замечания о природе доказательства ГЛАВА II. Рациональные числа § 1. Определение рациональных чисел § 2.  Конечные и бесконечные десятичные дроби Конечные и бесконечные десятичные дроби§ 3. Различные сгюсобы формулировки и доказательства предложений § 4. Периодические десятичные дроби § 5. Всякую конечную десятичную дробь можно представить в виде периодической десятичной дроби § 6. Краткие выводы ГЛАВА III. Действительные числа § 1. Геометрическая точка зрения § 2. Десятичные представления § 3. Иррациональность числа V2 § 4. Иррациональность числа V3 § 5. Иррациональность чисел V6 и V2+V3 § 6. Слова, которыми мы пользуемся § 7. Приложение к геометрии § 8. Краткие выводы ГЛАВА IV. Иррациональные числа § 1. Свойства замкнутости § 2. Алгебраические уравнения § 3. Рациональные корни алгебраических уравнений § 4. Дальнейшие примеры § 5. Краткие выводы ГЛАВА V. Значения тригонометрических и логарифмической функций § 1. Иррациональные значения тригонометрических функций § 2. Одно общее правило § 3. Иррациональные значения десятичных логарифмов § 4.  Трансцендентные числа Трансцендентные числа§ 5. Три знаменитые задачи на построение § 6. Дальнейший анализ числа V2 § 7. Краткие выводы ГЛАВА VI. Приближение иррациональных чисел рациональными § 1. Неравенства § 2. Приближение целыми числами § 3. Приближение рациональными числами § 4. Лучшие приближения § 5. Приближения с точностью до 1/n2 § 6. Ограничения точности приближений ГЛАВА VII. Существование трансцендентных чисел § 1. Предварительные сведения из алгебры § 2. Один способ приближения числа а § 3. План доказательства § 4. Свойства многочленов § 5. Трансцендентность числа а § 6. Краткие выводы ПРИЛОЖЕНИЕ А. Доказательство бесконечности числа простых чисел ПРИЛОЖЕНИЕ Б. Доказательство основной теоремы арифметики ПРИЛОЖЕНИЕ В. Доказательство Кантора существования трансцендентных чисел ПРИЛОЖЕНИЕ Г. Доказательство иррациональности значений тригонометрических фуннций И. М. Яглом Ответы и указания к упражнениям ПРИЛОЖЕНИЕ В Литература |
 Числа рациональные и иррациональные
Числа рациональные и иррациональные
Алгебраическое уравнение | Определение, примеры и факты
- Развлечения и поп-культура
- География и путешествия
- Здоровье и медицина
- Образ жизни и социальные вопросы
- Литература
- Философия и религия
- Политика, право и правительство
- Наука
- Спорт и отдых
- Технология
- Изобразительное искусство
- Всемирная история
- Этот день в истории
- Викторины
- Подкасты
- Словарь
- Биографии
- Резюме
- Популярные вопросы
- Обзор недели
- Инфографика
- Демистификация
- Списки
- #WTFact
- Товарищи
- Галереи изображений
- Прожектор
- Форум
- Один хороший факт
- Развлечения и поп-культура
- География и путешествия
- Здоровье и медицина
- Образ жизни и социальные вопросы
- Литература
- Философия и религия
- Политика, право и правительство
- Наука
- Спорт и отдых
- Технология
- Изобразительное искусство
- Всемирная история
- Britannica объясняет
В этих видеороликах Britannica объясняет различные темы и отвечает на часто задаваемые вопросы. - Britannica Classics
Посмотрите эти ретро-видео из архивов Encyclopedia Britannica. - #WTFact Видео
В #WTFact Britannica делится некоторыми из самых странных фактов, которые мы можем найти. - На этот раз в истории
В этих видеороликах узнайте, что произошло в этом месяце (или любом другом месяце!) в истории. - Demystified Videos
В Demystified у Britannica есть все ответы на ваши животрепещущие вопросы.
- Студенческий портал
Britannica — это главный ресурс для учащихся по ключевым школьным предметам, таким как история, государственное управление, литература и т. д. - Портал COVID-19
Хотя этот глобальный кризис в области здравоохранения продолжает развиваться, может быть полезно обратиться к прошлым пандемиям, чтобы лучше понять, как реагировать сегодня. - 100 женщин
Britannica празднует столетие Девятнадцатой поправки, выделяя суфражисток и политиков, творящих историю. - Britannica Beyond
Мы создали новое место, где вопросы находятся в центре обучения. Вперед, продолжать. Просить. Мы не будем возражать. - Спасение Земли
Британника представляет список дел Земли на 21 век. Узнайте об основных экологических проблемах, стоящих перед нашей планетой, и о том, что с ними можно сделать! - SpaceNext50
Britannica представляет SpaceNext50. От полёта на Луну до управления космосом — мы исследуем широкий спектр тем, которые подпитывают наше любопытство к космосу!

Содержание
- Введение
Краткие факты
- Связанный контент
Викторины
- Дайте определение: математические термины
Дифференциально-алгебраические уравнения — Scholarpedia
Stephen L. | doi:10.4249/scholarpedia.2849 | редакция #153375 [ссылка/цитировать эту статью] |
Постпубликационная деятельность
Куратор: Ву Хоанг Линь
Авторы:
0.36 —
Евгений Михайлович Ижикевич
0,18 —
Ник Орбек
0,18 —
Барбара Зубик-Коваль
0,18 —
Линда Р. Петцольд
0,09 —
Мишель Л. Джонс
0,09 —
Бенджамин Броннер
0,09 —
Стивен Л. Кэмпбелл
Доктор Стивен Л. Кэмпбелл, Государственный университет Северной Каролины, Роли, Северная Каролина, США.
Ву Хоанг Линь, Факультет математики, механики и информатики Вьетнамского национального университета, Ханой, Вьетнам
Линда Р. Петцольд, факультет машиностроения и факультет компьютерных наук, Калифорнийский университет в Санта-Барбаре, Калифорния
Дифференциально-алгебраическое уравнение ( DAE ) представляет собой уравнение, содержащее неизвестную функцию и ее производные. ДАУ (первого порядка) в наиболее общем виде имеет вид \[\тег{1} F(t,x,x’)=0,\quad t_0\leq t\leq t_f, \]
где \(x=x(t)\ ,\) неизвестная функция и \(F=F(t,u,v)\) имеют \(N\) компонентов, обозначаемых \(x_i\) и \(F_i,\i=1,2,…,N\ ,\) соответственно. Каждая ДАУ может быть записана как ДАУ первого порядка. Термин DAE обычно зарезервирован для случая, когда старшая производная \(x’\) не может быть решена в терминах других терминов \(t, x,\), когда (1) рассматривается как алгебраическая связь между тремя переменными \(t, x, x’\ .
Метод решения ДАУ будет зависеть от его структуры. Особым, но важным классом ДАУ вида (1) являются полуявные ДАУ или обыкновенные дифференциальные уравнения (ОДУ) с ограничениями \[\тег{2} \begin{массив}{ccc} у’ & = & f(t,y,z) \\ 0 & = & g(t,y,z), \конец{массив} \]
, которые часто появляются в приложениях. Здесь \(x=(y,z)\) и \(g(t,y,z)=0\) — явные ограничения.
Содержимое
|
 2 Специальные формы DAE
2 Специальные формы DAEГде возникают DAE?
ДАУ в общей форме (1) или специальной форме (2) возникают при математическом моделировании широкого круга технических и научных задач. например, в механике многотельных и гибких тел, проектировании электрических схем, оптимальном управлении, несжимаемых жидкостях, молекулярной динамике, химической кинетике (приближения квазистационарного состояния и частичного равновесия), и контроль химических процессов.
Пример. Простой пример ДАЭ возникает при моделировании движения маятника в декартовых координатах.
Рис. 1: Маятник
Предположим, что длина маятника равна 1, а координаты крошечного шарика массы 1 на конце стержня равны \( (x_1,x_2) \ .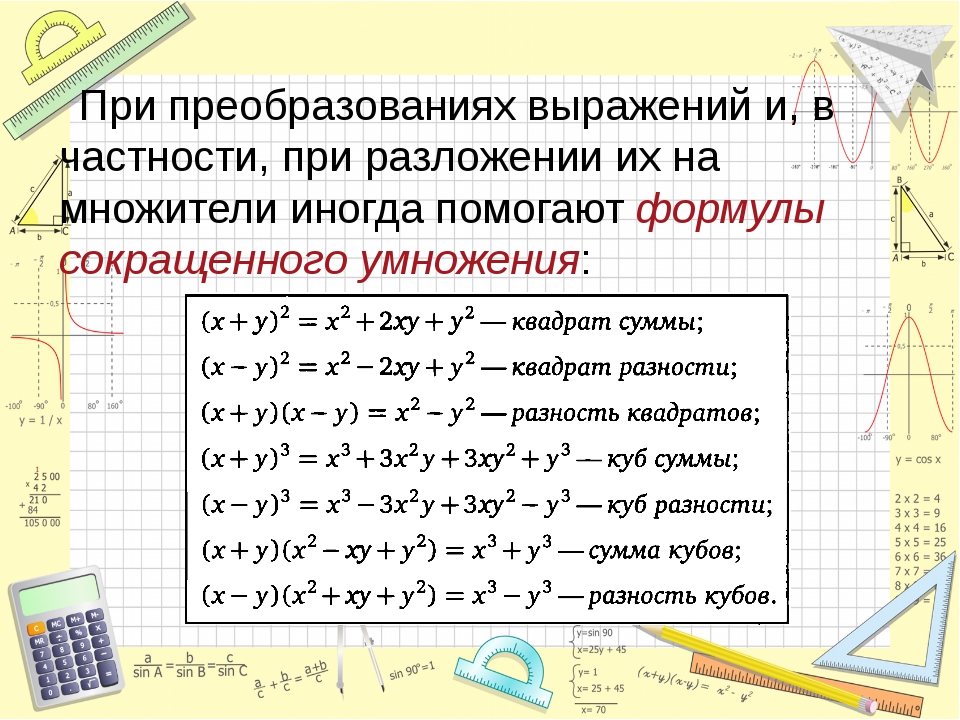 2& = &1.
\конец{массив}
\]
2& = &1.
\конец{массив}
\]
В этом очень простом случае механической системы из нескольких тел замена переменных \(x_1=\sin \theta, x_2=\cos \theta \)
а затем некоторые алгебраические действия дают хорошо известное ОДУ для маятника \(\theta»=-g \sin \theta\ .\) Однако такая простая процедура исключения обычно невозможна в более общих ситуациях.
Дополнительные примеры реальных систем DAE, включая многотельные механические системы, электрическую цепь и задачу управления заданным путем, можно найти в Brenan et al. (1996). Следует отметить, что ограничение в механике, т.е. в примере с маятником является физическим, в то время как ограничение в других задачах, таких как задача о заданном пути, не является физическим, а скорее является частью технических характеристик.
Почему они важны?
ДАУ являются обобщением обыкновенных дифференциальных уравнений (ОДУ) \[\тег{5} \begin{массив}{ccc} х’&=&f(t,x), \конец{массив} \]
, для которого существует очень богатая литература как по математической теории, так и по численному решению. В то время как ОДУ стандартной формы может быть записано как ДАУ, более общая форма ДАУ допускает проблемы, которые могут сильно отличаться от ОДУ стандартной формы. К классу ДАУ относятся задачи, обладающие фундаментальными математическими свойствами, отличными от свойств ОДУ, а также создающие дополнительные трудности при их численном решении. С другой стороны, неявный DAE
модели формулируются более естественным образом, чем явные, как показывают приведенные выше примеры. Легче получить сложную модель DAE, поэтому крайне желательно иметь возможность работать с моделью DAE, если это возможно.
9′ & = & г \\
0 & = & у — q(t),
\конец{массив}
\]
В то время как ОДУ стандартной формы может быть записано как ДАУ, более общая форма ДАУ допускает проблемы, которые могут сильно отличаться от ОДУ стандартной формы. К классу ДАУ относятся задачи, обладающие фундаментальными математическими свойствами, отличными от свойств ОДУ, а также создающие дополнительные трудности при их численном решении. С другой стороны, неявный DAE
модели формулируются более естественным образом, чем явные, как показывают приведенные выше примеры. Легче получить сложную модель DAE, поэтому крайне желательно иметь возможность работать с моделью DAE, если это возможно.
9′ & = & г \\
0 & = & у — q(t),
\конец{массив}
\]
где задана достаточно гладкая функция \(q\). Ясно, что единственным решением является \(y=q(t),\z=q'(t)\ ,\), и никаких начальных или граничных условий не требуется. То есть, если наложено произвольное начальное условие, оно вполне может быть несовместимо с ДАУ. Кроме того, видно, что решение зависит от производной неоднородной части (или производной входа, если роль входа играет функция \(q\)), чего не может быть в случае ОДУ. Другое отличие состоит в том, что даже если даны непротиворечивые начальные значения, теория существования и единственности более сложна и включает дополнительные технические предположения, помимо достаточной гладкости, как в случае ОДУ. Тот факт, что в первом уравнении этого примера необходимо дифференцировать \(y\ ,\), что влечет за собой дифференцирование входной функции \(q\ ,\), чтобы найти \(z\ ,\), делает ключевым разница. Для ОДУ стандартной формы решение всегда более непрерывно, чем вход. Другими словами, DAE может включать как интеграцию, так и дифференциацию.
Другое отличие состоит в том, что даже если даны непротиворечивые начальные значения, теория существования и единственности более сложна и включает дополнительные технические предположения, помимо достаточной гладкости, как в случае ОДУ. Тот факт, что в первом уравнении этого примера необходимо дифференцировать \(y\ ,\), что влечет за собой дифференцирование входной функции \(q\ ,\), чтобы найти \(z\ ,\), делает ключевым разница. Для ОДУ стандартной формы решение всегда более непрерывно, чем вход. Другими словами, DAE может включать как интеграцию, так и дифференциацию.
Индекс и математическая структура
Индекс
Индекс — это понятие, используемое в теории ДАУ для измерения расстояния от ДАУ до связанного с ним ОДУ. Индекс представляет собой неотрицательное целое число, которое предоставляет полезную информацию о математической структуре и потенциальных сложностях при анализе и численном решении ДАУ. В общем случае, чем выше индекс ДАУ, тем больше трудностей можно ожидать при его численном решении. Существуют различные определения индекса: индекс Кронекера (для ДАУ с линейным постоянным коэффициентом), индекс дифференцирования (Бренан и др. 19).96), индекс возмущения (Хайрер и др., 1996), индекс управляемости (Грипентрог и др., 1986), геометрический индекс (Рабье и др., 2002) и индекс странности (Кункель и др., 2006). На простых задачах они идентичны. На более сложных нелинейных и полностью неявных системах они могут быть другими. Фактически индекс может стать локальным понятием с разными значениями в разных регионах. Индекс может быть даже не определен в так называемых особых точках, которые обычно демонстрируют явление тупика (Rabier et al. 2002, Riaza 2008).
Существуют различные определения индекса: индекс Кронекера (для ДАУ с линейным постоянным коэффициентом), индекс дифференцирования (Бренан и др. 19).96), индекс возмущения (Хайрер и др., 1996), индекс управляемости (Грипентрог и др., 1986), геометрический индекс (Рабье и др., 2002) и индекс странности (Кункель и др., 2006). На простых задачах они идентичны. На более сложных нелинейных и полностью неявных системах они могут быть другими. Фактически индекс может стать локальным понятием с разными значениями в разных регионах. Индекс может быть даже не определен в так называемых особых точках, которые обычно демонстрируют явление тупика (Rabier et al. 2002, Riaza 2008).
Поскольку ДАУ включает в себя смесь дифференцирований и интегрирований, можно надеяться, что дифференцирование ограничений (в полуявной системе ДАУ) и подстановка по мере необходимости из дифференциальных уравнений, при необходимости многократно, даст явную систему ОДУ для всех неизвестные. Решения ДАУ — это те решения этого ОДУ, которые находятся в подмножестве, называемом многообразием решений. Количество повторений, необходимых для этого преобразования, называется дифференциальным индексом ДАУ. Таким образом, ОДУ имеют индекс \(0\ .\) Рассмотрим несколько простых примеров.
Количество повторений, необходимых для этого преобразования, называется дифференциальным индексом ДАУ. Таким образом, ОДУ имеют индекс \(0\ .\) Рассмотрим несколько простых примеров.
Пример. . Пусть \(q(t)\) — заданная гладкая функция, и рассмотрим следующие задачи для \(x(t)\ .\)
- Скалярное уравнение
\[\тег{7} х (т) = д (т) \]
является (тривиальным) ДАУ с индексом 1, поскольку для получения ОДУ \(x’=q'(t) \ .\) требуется одно дифференцирование
- Для системы
\[\тег{8} \begin{массив}{ccc} x_1& = & q(t) \\ х_2 & = & х_1′, \конец{массив} \]
первое уравнение дифференцируется, чтобы получить \(x_2=x_1’=q'(t) \), а затем \(x_2’=x_1»=q»(t) \ .\) Индекс равен \(2 \), так как необходимы два дифференцирования.
Обратите внимание, что хотя \(m\) начальные или граничные условия должны быть заданы для определения решения ОДУ первого порядка размера \(m\ ,\) для простых ДАУ в приведенном выше примере, решение полностью определяется правая часть и имеется только одно согласованное начальное условие. Общие системы DAE обычно включают также некоторые подсистемы ODE. Таким образом, система DAE в общем случае будет иметь \(l\) степеней свободы , где \(l\) находится где-то между \(0\) и \(m\ .\). , или, по крайней мере, не очевидно, чтобы определить, какие \(l\) фрагментов информации необходимы для определения решения. Начальное или граничное условие, заданное для ДАУ, должно быть непротиворечивым. Другими словами, они должны удовлетворять ограничениям и, возможно, даже дифференцированным ограничениям системы. Например, начальное условие для системы индекса 1 (7) (которое необходимо, если записать его как ОДУ) должно удовлетворять \(x_1(0)=q(0)\ .\) Для системы индекса 2 (8) ситуация несколько сложнее. Любое решение должно удовлетворять не только очевидному ограничению \(x_1(t)=q(t)\,\), но и скрытому ограничению \(x_2(t)=q'(t)\,\), поэтому единственное согласованное начальные условия: \(x_1(0)=q(0),\x_2(0)=q'(0)\ .\) Это важное различие между index-1 и с более высоким индексом (индекс больше \(1\)) DAE.
Общие системы DAE обычно включают также некоторые подсистемы ODE. Таким образом, система DAE в общем случае будет иметь \(l\) степеней свободы , где \(l\) находится где-то между \(0\) и \(m\ .\). , или, по крайней мере, не очевидно, чтобы определить, какие \(l\) фрагментов информации необходимы для определения решения. Начальное или граничное условие, заданное для ДАУ, должно быть непротиворечивым. Другими словами, они должны удовлетворять ограничениям и, возможно, даже дифференцированным ограничениям системы. Например, начальное условие для системы индекса 1 (7) (которое необходимо, если записать его как ОДУ) должно удовлетворять \(x_1(0)=q(0)\ .\) Для системы индекса 2 (8) ситуация несколько сложнее. Любое решение должно удовлетворять не только очевидному ограничению \(x_1(t)=q(t)\,\), но и скрытому ограничению \(x_2(t)=q'(t)\,\), поэтому единственное согласованное начальные условия: \(x_1(0)=q(0),\x_2(0)=q'(0)\ .\) Это важное различие между index-1 и с более высоким индексом (индекс больше \(1\)) DAE. DAE с более высоким индексом включают в себя некоторые скрытые ограничения.
DAE с более высоким индексом включают в себя некоторые скрытые ограничения.
Снова рассмотрим полуявный ДАУ (2). Индекс равен единице, если \(\partial g/\partial z\) невырожденно, потому что в этом случае одно дифференцирование алгебраического уравнения дает \(z’\ .\). Для полуявного индекса-1 ДАУ можно различить между дифференциальными переменными \(y\), производная которых фигурирует в уравнениях, и алгебраическими переменными \(z\), производная которых явно не фигурирует. Также стоит отметить, что алгебраические переменные могут быть менее гладкими, чем дифференциальные переменные на одну производную, например. алгебраические переменные могут быть недифференцируемыми.
В общем случае (1) каждая компонента решения \(x\) может быть смесью дифференциальной и алгебраической компонент, что значительно усложняет качественный анализ, а также численное решение таких высокоиндексных задач и более рискованно. В этом смысле полуявная форма развязана. Любой ДАУ (1) можно записать в полуявном виде, введя новую переменную \(z=x’\ . \) Однако индекс нового ДАУ увеличивается на единицу. Наконец, важно отметить, как показывает следующий пример, что в общем случае индекс может зависеть и от конкретного решения, а не только от вида ДАУ.
9Т\)
\[\тег{9}
\begin{массив}{rcl}
х_1’& = & х_3 \\
0 & = & x_2(1-x_2)\\
0 & = & x_1x_2+x_3(1-x_2)-t.
\конец{массив}
\]
\) Однако индекс нового ДАУ увеличивается на единицу. Наконец, важно отметить, как показывает следующий пример, что в общем случае индекс может зависеть и от конкретного решения, а не только от вида ДАУ.
9Т\)
\[\тег{9}
\begin{массив}{rcl}
х_1’& = & х_3 \\
0 & = & x_2(1-x_2)\\
0 & = & x_1x_2+x_3(1-x_2)-t.
\конец{массив}
\]
Второе уравнение имеет два решения \(x_2=0\) и \(x_2=1\ .\) Если задана непрерывность \(x_2\), то \(x_2\) не переключается между этими двумя значениями . Легко видеть, что если \(x_2=0\ ,\), то система находится в полуявном виде и имеет индекс-1, а для случая \(x_2=1\ ,\) система имеет индекс-2 и, в отличие от случая с индексом 1, начальное значение \(x_1\) не требуется.
Теперь, если заменить алгебраическое уравнение, содержащее \(x_2\), на \(x_2’=0\ ,\), то индекс новой системы ДАУ будет зависеть от начального условия. Если \(x_2(0)=1\) индекс равен 2, иначе индекс равен 1.
Специальные формы ДАУ
Общая система ДАУ (1) может включать в себя задачи, которые не являются четко определенными в математическом смысле, а также задачи, которые приведут к отказу любого метода прямой дискретизации (см. раздел «Численное решение»). К счастью, многие проблемы с более высоким индексом, встречающиеся на практике, могут быть выражены как комбинация более ограничительных структур ОДУ в сочетании с ограничениями.
Одним из наиболее важных классов систем являются 9{\ простое число} & = & е (т, у, г) \\
0 & = & g(t,y,z),
\конец{массив}
\]
раздел «Численное решение»). К счастью, многие проблемы с более высоким индексом, встречающиеся на практике, могут быть выражены как комбинация более ограничительных структур ОДУ в сочетании с ограничениями.
Одним из наиболее важных классов систем являются 9{\ простое число} & = & е (т, у, г) \\
0 & = & g(t,y,z),
\конец{массив}
\]
где якобиан \(g_z\) предполагается невырожденным для всех t. Это всего лишь полуявная система DAE с индексом 1, упомянутая выше. Полуявные ДАУ с индексом 1 очень тесно связаны с неявными ОДУ. После решения для \(z\) в алгебраическом уравнении (используя теорему о неявной функции, это в принципе можно сделать), подстановка \(z\) в дифференциальное уравнение дает так называемое основное ОДУ в \(y\) (хотя уникальность не гарантируется). Однако по разным причинам эта процедура не всегда рекомендуется на практике для численного решения. 9{\ простое число} & = & е (т, у, г) \\ 0&=&g(t,y), \конец{массив} \]
где \(g_y f_z\) предполагается невырожденным для всех t. Обратите внимание, что во втором уравнении отсутствует алгебраическая переменная \(z\). Это чистый ДАУ индекса 2, и все алгебраические переменные играют роль переменных индекса 2.
Пример, возникающий при моделировании потока несжимаемой жидкости с помощью дискретизированных уравнений Навье-Стокса, приведен в Ascher et al. (1998).
Обратите внимание, что во втором уравнении отсутствует алгебраическая переменная \(z\). Это чистый ДАУ индекса 2, и все алгебраические переменные играют роль переменных индекса 2.
Пример, возникающий при моделировании потока несжимаемой жидкости с помощью дискретизированных уравнений Навье-Стокса, приведен в Ascher et al. (1998).
Численное решение
Численные подходы к решению ДАУ можно разделить примерно на два класса: (i) прямая дискретизация данной системы и (ii) методы, которые включают переформулировку (например, уменьшение индекса) в сочетании с дискретизацией. Стремление к как можно более прямой дискретизации возникает из-за того, что переформулировка может быть дорогостоящей, может потребовать большего ввода данных от пользователя и большего вмешательства пользователя. Причина популярности подходов с переформулировкой заключается в том, что, как оказалось, прямая дискретизация ограничена в своей полезности в основном системами Hessenberg DAE с индексом 1, индексом 2 и индексом Hessenberg 3.
К счастью, многие ДАУ, встречающиеся в практических приложениях, имеют либо индекс 1, либо, если индекс выше, могут быть выражены в виде простой комбинации систем Хессенберга. Однако могут возникнуть некоторые трудности в худшем случае, и самые надежные прямые приложения численных методов ОДУ не всегда работают так, как можно было бы надеяться, даже для этих ограниченных классов задач. Для DAE с индексом больше двух обычно лучше всего использовать один из методов уменьшения индекса для решения проблемы в форме с более низким индексом.
Дифференциальные уравнения, такие как \[\тег{12} \begin{массив}{rcl} у’ & = & f(t,y,z) \\ \varepsilon z’& = & g(t,y,z), \конец{массив} \]
, где \(\varepsilon\) — малый параметр, называются сингулярно возмущенными системами ОДУ. Когда для параметра \(\varepsilon\) установлено значение \(0\ ,\), (12) становится DAE (2). Поскольку система (12) является (в общем случае) очень жесткой при малых \(\varepsilon\ ,\), естественно рассмотреть методы для жестких ОДУ прямой дискретизации предельного ДАУ, а для ДАУ вида (1) в общем. В частности, полезны методы ОДУ с жестким затуханием, такие как методы коллокации BDF и Радау.
В частности, полезны методы ОДУ с жестким затуханием, такие как методы коллокации BDF и Радау.
Численные методы/Прямая дискретизация
- Обратный метод Эйлера/Пример неустойчивости
Идея прямой дискретизации проста: аппроксимировать \(x\) и \(x’\) формулой дискретизации, подобной многошаговым методам или методам Рунге-Кутты. В качестве иллюстрации использования прямой дискретизации рассмотрим обратный метод Эйлера, простейший метод, обладающий свойством жесткого затухания. Применение формулы обратной разности к \(x’\) в (1), система \(N\) нелинейных уравнений для \(x_n\) \[\тег{13} F(t_n,x_n,\frac{x_n-x_{n-1}}{h_n})=0 \mbox{ для } n=1,2,…, \]
результаты. Здесь \(t_n\) — моменты времени, когда мы вычисляем приближение, \(x_n\) — приближение \(x(t_n)\,\) и \(h_n=t_n-t_{n-1}\ ) — временной шаг или размер шага. После рекурсивного решения этой нелинейной системы уравнений получается численное решение уравнения (1). Этот метод хорошо работает для ДАУ с индексом 1 и особенно подходит для жестких ДАУ с индексом 1, а также для жестких ОДУ.
Для ДАУ с более высоким индексом этот простой метод, как и другие методы,
не всегда работает. В худшем случае существуют простые системы ДАУ с более высоким индексом с четко определенными и устойчивыми решениями, для которых обратный метод Эйлера, а фактически все другие многошаговые методы и методы Рунге-Кутты неустойчивы или даже неприменимы. См. пример 10.1 в Ascher et al. (1998). См. также моделирование механики нескольких тел, где визуализируется использование стабильных и нестабильных численных методов. Некоторые практические трудности могут возникнуть и при решении нелинейной системы (13) для \(x_n\) при заданном \(x_{n-1}\ .\). метод. Эти технические трудности объясняют, почему, как правило, прямая дискретизация полностью неявных ДАУ с индексом выше единицы не рекомендуется. Для полностью неявных ДАУ индекса-1 и полуявного индекса-2 было показано, что обратный метод Эйлера является точным, стабильным и сходящимся первого порядка. Подробные обсуждения и результаты сходимости можно найти в Brenan et al. s a_{ij}K_j,\quad i=1,2,…,s,
\конец{массив}
\]
9s a_{ij}K_j,\\
g\left(t_{n-1}+c_i h,Y_{ni},Z_{ni}\right)&=&0. \quad i=1,2,…,s.
\конец{массив}
\]
s a_{ij}K_j,\quad i=1,2,…,s,
\конец{массив}
\]
9s a_{ij}K_j,\\
g\left(t_{n-1}+c_i h,Y_{ni},Z_{ni}\right)&=&0. \quad i=1,2,…,s.
\конец{массив}
\]
Можно избежать квадратурного шага (16) для алгебраических переменных \(z\), используя жестко точные методы, т.е. методы Рунге-Кутты, удовлетворяющие \(b_j=a_{sj},\ j=1 ,2,…,s,\ .\) Вместо (16) просто задается \(y_n=Y_{ns}\ .\) Как и в случае общих многошаговых методов, имеются дополнительные условия порядка, коэффициенты метода должны удовлетворять требованиям, чтобы метод достиг порядка выше 2. Для методов Рунге-Кутты требование дополнительных условий порядка возникает даже для полуявных ДАУ с индексом 1.
Следует также отметить, что реализация методов прямой дискретизации для ДАУ сталкивается с некоторыми дополнительными практическими трудностями, такими как получение согласованного набора начальных условий, обработка плохой обусловленности итерационной матрицы и, наконец, оценка ошибок и управление ступенчатым размером для ДАУ Hessenberg с индексом 2.
Для некоторых специальных классов ДАУ, таких как полуявные ДАУ в форме Хессенберга и ОДУ на многообразиях, в частности для ДАУ, возникающих в механике множественных тел, существуют очень эффективные и надежные численные методы, называемые стабилизированными или проекционными методами. Основная идея состоит в том, чтобы сначала дискретизировать дифференциальные уравнения с помощью соответствующего численного метода ОДУ. За этим шагом следует этап постстабилизации или проекции координат, чтобы приблизить численное решение к удовлетворению ограничения, см. Eich-Soellner et al. (1998).
Для получения более подробной информации о числовых значениях DAE см. Ascher et al. (1998), Бренан и др. (1996) и Хайрер и соавт. (1998).
Программное обеспечение
Проблемы с начальными значениями
- Код DASSL от Petzold использует формулы BDF для решения ДАУ общего индекса 1, см. Brenan et al. (1996) для деталей. Также доступны версии для крупномасштабных задач (называемые DASPK) и для анализа чувствительности. Некоторые более поздние версии DASPK также могут решать DAE с индексом Hessenberg 2. Существует также код DASPKADJOINT, который реализует сопряженный метод для анализа чувствительности систем DAE.
 Некоторые более поздние версии DASPK также могут решать DAE с индексом Hessenberg 2. Существует также код DASPKADJOINT, который реализует сопряженный метод для анализа чувствительности систем DAE.
Некоторые более поздние версии DASPK также могут решать DAE с индексом Hessenberg 2. Существует также код DASPKADJOINT, который реализует сопряженный метод для анализа чувствительности систем DAE.- Код RADAU5 от Hairer & Wanner (1998) основан на трехэтапном методе коллокации Радау. Он решает ДАУ вида \(Mx’=f(t,x)\,\), где \(M\) — постоянная квадратная матрица, которая может быть сингулярной. Кодекс применим к задачам индекса 1,2,3. Переменные с более высоким индексом должны быть идентифицированы пользователем.
- Код IDA является частью программного пакета SUNDALS (SUite of Nonlinear and DIfferential/ALgebraic Solutions), который был разработан Сербаном и Хиндмаршем в Ливерморской национальной лаборатории им. Лоуренса, США. Он написан на C для решения нелинейных ДАУ, но получен из пакета DASPK, написанного на Фортране. Также доступен связанный с СОЛНЕЧНЫМИ ЧАСАМИ код CPODES (решатель координатной проекции для ОДУ с инвариантами), написанный Сербаном.
- DAEPACK — это программная библиотека, разработанная Полом И. Бартоном и его группой в Массачусетском технологическом институте. DAEPACK — это аббревиатура от «Пакет дифференциально-алгебраических уравнений», однако его область применения не ограничивается анализом ДАУ. DAEPACK включает в себя как символьные, так и числовые компоненты для моделирования, а также для общих числовых расчетов.
- Другие коды: MEXX by Lubich et al. (1992), LIMEX Deuflhard et al. (1987), GELDA и GENDA Kunkel et al. (1997) также доступны.
Краевые задачи
- Код COLDAE по Ascher et al. (1994) использует спроецированное сопоставление Гаусса с BVP для полуявного индекса 2 DAE.
Каталожные номера
- Ascher U.M.; Петцольд Л.Р. (1998) Компьютерные методы решения обыкновенных дифференциальных уравнений и дифференциально-алгебраических уравнений. Общество промышленной и прикладной математики (SIAM), Филадельфия, Пенсильвания.
- Бренан К.Е.; Кэмпбелл С.Л.; Петцольд Л.Р. (1996) Численное решение начальных задач в дифференциально-алгебраических уравнениях. Пересмотренное и исправленное переиздание оригинала 1989 г. с дополнительной главой и дополнительными ссылками. Классика прикладной математики, 14. Общество промышленной и прикладной математики (SIAM), Филадельфия, Пенсильвания.
- Кэмпбелл С.Л. и Петцольд Л.Р. (1983) Канонические формы и разрешимые сингулярные системы дифференциальных уравнений, SIAM J. Alg. Диск. Мет. 4:517-521
- Хайрер Э.; Ваннер Г. (1996) Решение обыкновенных дифференциальных уравнений. II. Жесткие и дифференциально-алгебраические задачи. Второе издание. Серия Springer по вычислительной математике, 14. Springer-Verlag, Берлин.
- Петцольд Л.Р. (1982) Дифференциальные/алгебраические уравнения не являются ОДУ, SIAM J. Sci. Стат. Вычисл., 3:367-384
- Рабье П.Дж.; Рейнбольдт В.К. (2002) Теоретический и численный анализ дифференциально-алгебраических уравнений. Справочник по численному анализу, Vol. VIII, 183–540, Handb. Число. Anal., VIII, Северная Голландия, Амстердам.
- Риаза Р. (2008), Дифференциально-алгебраические системы: аналитические аспекты и применение схем, World Scientific, Сингапур.
 Справочник по численному анализу, Vol. VIII, 183–540, Handb. Число. Anal., VIII, Северная Голландия, Амстердам.
Справочник по численному анализу, Vol. VIII, 183–540, Handb. Число. Anal., VIII, Северная Голландия, Амстердам.Внутренние ссылки
- Джон Батчер (2007) Методы Рунге-Кутты. Академия, 2(9):3147
- Билл Гир (2007) Формулы обратного дифференцирования. Академия, 2(8):3162
- Ян Гладуэлл (2008) Краевая задача. Академия, 3(1):2853
- Алан С. Хиндмарш и Раду Сербан (2007) Решатели уравнений солнечных часов. Академия, 2(3):2860
- Здзислав Яцкевич (2007) Общие линейные методы. Академия, 2(4):2852
- Лоуренс Ф. Шампайн и Скип Томпсон (2007) Проблемы с начальным значением. Академия, 2(3):2861
- Лоуренс Ф. Шампайн и Скип Томпсон (2007) Жесткие системы. Академия, 2(3):2855
Внутренние ссылки
- Билл Гир (2007) Формулы обратного дифференцирования. Scholarpedia, 2(8):3162.
 Scholarpedia, 2(8):3162.
Scholarpedia, 2(8):3162.- Ян Гладуэлл (2008) Краевая задача. Scholarpedia, 3(1):2853.
- Джеймс Мейсс (2007) Динамические системы. Scholarpedia, 2 (2): 1629.
- Здислав Яцкевич (2007) Общие линейные методы. Scholarpedia, 2(4):2852.
- Лоуренс Ф. Шампайн и Скип Томпсон (2007) Проблемы с начальными значениями. Scholarpedia, 2(3):2861.
- Кендалл Э. Аткинсон (2007) Численный анализ. Scholarpedia, 2(8):3163.
- Джон Батчер (2007) Методы Рунге-Кутты. Академия, 2(9)):3147.
- Филип Холмс и Эрик Т. Ши-Браун (2006) Стабильность. Scholarpedia, 1 (10): 1838.
- Никола Гульельми и Эрнст Хайрер (2007) Жесткие уравнения с запаздыванием. Scholarpedia, 2(11):2850.
- Лоуренс Ф. Шампайн и Скип Томпсон (2007) Жесткие системы. Scholarpedia, 2(3):2855.
- Алан С. Хиндмарш и Раду Сербан (2007) Решатели уравнений солнечных часов. Scholarpedia, 2(3):2860.
 Scholarpedia, 2(3):2860.
Scholarpedia, 2(3):2860.Рекомендуемое чтение
- Эйх-Зёлльнер Э. и Фюрер К. (1998) Численные методы в многотельных системах. Teubner Verlag, Штутгарт, Германия.
- Грипентрог Э., Марц Р. (1986) Дифференциально-алгебраические уравнения и их числовая обработка. С немецким, французским и русским резюме. Teubner-Texte zur Mathematik [Тексты Тойбнера по математике], 88. BSB BG Teubner Verlagsgesellschaft, Лейпциг.
- Хайрер Э., Любич К. и Рош М. (1989) Численное решение дифференциально-алгебраических систем методами Рунге-Кутты, конспект лекций по математике № 1409, Springer-Verlag, Берлин.
- Кункель П., Мерманн В. (2006), Анализ дифференциально-алгебраических уравнений и численное решение. Издательство EMS, Цюрих, Швейцария.
- Рабье П.Дж.; Рейнбольдт В.К. (2002) Теоретический и численный анализ дифференциально-алгебраических уравнений. Справочник по численному анализу, Vol. VIII, 183–540, Handb. Число. Anal., VIII, Северная Голландия, Амстердам.
