
4х4 в квадрате — журнал За рулем
ТЕХНИКА
Новинки
Материалы рубрики подготовил Алексей ВОРОБЬЕВ-ОБУХОВ
4Х4 В КВАДРАТЕ
Колесную формулу 4х4 знает каждый автолюбитель: четыре колеса — все ведущие. Своим рулевым управлением «Квадрастир» (Quadrasteer(tm)) фирма «Делфай» придала ей новый смысл.
Действительно, «по Делфаю» это означает: четыре колеса и все… управляемые. Вообще-то, подруливающие задние колеса хотя и экзотика, но далеко не новость: вспомним хотя бы некоторые модели «Мазды» и «Хонды». Здесь, однако, случай особый: предлагается чисто электрическое рулевое управление для заднего моста полноразмерных вседорожников и пикапов. Так что действительно получаем новую формулу (4х4)2!
На Детройтском автосалоне состоялась премьера новинки в концепт-каре «Джи-Эм-Си Террадайн». А уже в мае систему могла купить любая заинтересованная в ее установке фирма. В чем же изюминка изобретения?
Электронная система управления поворачивает задние колеса в зависимости от двух параметров — угла поворота передних колес и скорости автомобиля. Причем по-разному. Типичный алгоритм виден на графике. При 70–80 км/ч автомобиль ведет себя как обычный, но с уменьшением скорости задние колеса начинают все активнее поворачиваться в противоположную сторону относительно поворота передних. Теперь громоздкий джип легко запарковать или развернуть: на второй диаграмме показан радиус поворота наиболее популярных моделей и то, каким он станет при оснащении «Квадрастиром». «Две большие разницы» бросаются в глаза. Это, однако, еще не все. Тяжелые вседорожники часто используют для буксировки прицепов. С «Квадрастиром» последние гораздо четче повторяют траекторию движения тягача, а маневры задним ходом становятся элементарно простыми!
Теперь разгонимся побыстрее. Послушные компьютеру и программе задние колеса начнут поворачиваться синхронно с передними в ту же сторону. Правда, на небольшой угол, примерно на одну восьмую от угла поворота передних. Что это дает? Автомобиль с ростом скорости обретает все большую недостаточную поворачиваемость, а она благотворно сказывается на устойчивости. Уменьшаются центробежные силы, вызывающие занос или даже опрокидывание высокого джипа. В общем, управление становится легче и безопаснее. Впрочем, на панели приборов появляется и кнопка отключения системы — на всякий случай.
Кто первый решится оснастить свои джипы системой «Квадрастир», фирма пока не выдает, но на ближайших автосалонах новинка наверняка появится в оснащении уже не концепта, а вполне серийного автомобиля.
www.zr.ru
разница между приводом 4×4 и 4×2
Расхожим заблуждением является то, что 4×4 означает, что все четыре колеса вращаются одновременно с одинаковой скоростью. Когда полноприводный автомобиль поворачивает, его внешние колеса крутятся быстрее внутренних. Дифференциал в оси компенсирует большее расстояние, пройденное наружными колесами.
Когда вы едете по скользкой поверхности, мощность двигателя будет передаваться на колесо, имеющее более слабое сцепление с полотном дороги, поэтому то колесо, которое проскальзывает сильнее, получит и больше мощности.
Такие законы природы, известные как физика, которые говорят нам, что сила всегда пойдет по пути наименьшего сопротивления.
Когда внедорожник едет в режиме полного привода, передняя и задняя оси синхронизируются таким образом, чтобы всегда хотя бы одно колесо на каждой оси получало эффективную мощность от двигателя.
В автомобиле с приводом 4×2 вы можете заставить его временно работать как 4×4, слегка нажав на педаль тормоза, чтобы затормозить прокручивающееся колесо и передать его энергию на колесо, сохранившее сцепление с дорогой.
4×4 (4WD) – это автомобиль с полным приводом (4WD). «4×4» для автомобиля с полным приводом означает, что у него четыре колеса, и привод осуществляется на все колеса. Внедорожники обычно имеют привод 4×4.
4×2 (2WD) – автомобиль, у которого привод на два колеса из четырех (2WD). «4×2» в автомобиле с приводом 2WD означает, что из четырех колес привод осуществляется только на два. Это могут быть как передние, так и задние колеса, чаще – задние. У паркетников обычно привод 4×2.
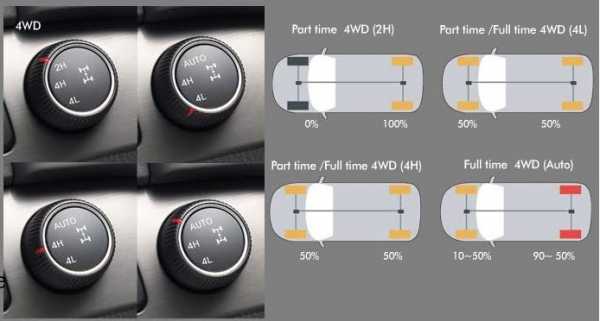
Part-Time 4WD – внедорожники, у которых система полного привода включается рычагом при необходимости и подает мощность на все четыре колеса, синхронизируя переднюю и заднюю оси.
У привода Part-Time 4WD обычно есть два диапазона передач – Hi и Lo, или нормальные и пониженные.
Системы Part-Time 4WD необходимо использовать на асфальте, цементе или других твердых покрытиях с хорошим сцеплением в режиме 2WD. Подключать полный привод следует только в конкретных ситуациях, когда требуется дополнительное сцепление, на твердых покрытиях можно повредить привод.
Full-Time 4WD – система полного привода, работающая всегда на любых покрытиях. Системы полного привода Full-Time обычно имеют функцию отключения, и вы можете перейти в режим 2WD на цементе или асфальте. У систем Full-Time 4WD не всегда имеется диапазон пониженных передач Lo.

Автоматический полный привод (A4WD) – этот тип привода становится полным при необходимости. Это достигается контролем разницы скорости вращения колес. Подобная автоматическая система имеется у электромобиля Polaris Ranger.
Подключаемый на ходу 4WD
В автомобилях с механическим переключением водитель может сломать систему, если не знает, что его скорость слишком велика для включения режима 4WD-Hi. Прочтите инструкцию по эксплуатации, если у вашего автомобиля система полного привода, подключаемого на ходу.

All-Wheel Drive (AWD) – система постоянного полного привода с одним диапазоном передач, передающая мощность на все четыре колеса. У каждой системы свое распределение мощности между передней и задней осями.
Вконтакте
Одноклассники
menside.ru
Чем отличается: 4×4, AWD, 4WD?
 Источник изображений: wikimedia.org
Источник изображений: wikimedia.orgПочему на разных моделях авто, принадлежность к полноприводным автомобилям, обозначается по-разному? В чем отличия авто с маркировкой 4×4, AWD и 4WD?
Маркетинговый ход
Разное название полного привода у разных производителей – это лишь маркетинговый ход. В широком смысле слова, все три наименования обозначают одно и то же: автомобиль полноприводный, у него ведущие – все четыре колеса. Разница лишь в технических особенностях привода.
Аll wheel drive
AWD – это полный привод, который подключается автоматически. В зависимости от задумки конструкторов, подключаться может как задний мост, так и передний. То есть, авто не постоянно находится в условиях полного привода: оно заднеприводное или переднеприводное, а вторая ось подключается только в определенных условиях: при пробуксовке первой оси. Традиционно такой вид привода используется для городских кроссоверов, рассчитанных на движение по асфальтированным дорогам, но адаптированных и к загородной езде.
Иными словами, это автомобиль для горожан, причем преимущественно – водителей новичков. Такое утверждение не спроста: на авто с автоматическим полным приводом, водителю не нужно задумываться о том, в какой момент подключать вторую ось: умная электироника все сделает за него, как только машина начнет буксовать.
4WD
4WD – это привод, который работает в постоянном режиме, при этом «блокировки» дифференциалов включаются вручную. На высоких скоростях (как правило, выше 60 км/ч) полный привод отключается автоматически.
Такой тип привода больше подходит для внедорожников, а не городской езды. Единственное «но»: авто с таким приводом потребляет больше топлива.
4х4
Если говорить о маркировке 4х4, то это просто общее название полного привода, которое трактуется так: работают 4 колеса из 4, то есть крутящий момент передается на все колеса, из имеющихся.
avtoidei.ru
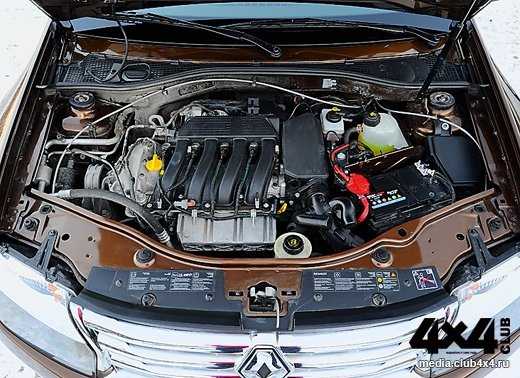
Мы решили выяснить, на что способны братцы Renault Duster в версиях 4х4 и 4х2
Понятия о бюджетных полноприводных автомобилях изменились с появлением Renault Duster: «недорогой» теперь не означает «дешевый»…
Недорогими внедорожниками у нас всегда считались «Нива», Chevrolet Niva, «УАЗ» и UAZ Patriot. Человек накапливал небольшую сумму денег и покупал себе дешевый автомобильчик.
А точнее, приобретал большую проблему. Сейчас же в России народился класс потребителей, кому бесполезно пытаться продать «коробчонку на колесах» или нечто подобное, пусть и более вместительное, но сломанное еще на конвейере. За 2013 год эти люди расхватали почти 84 тысячи Renault Duster, выведя его на первое место в стране по продажам среди внедорожников. Все более дешевые конкуренты остались далеко позади. Но это еще не триумф. Совсем недавно появилась полноприводная комплектация Duster с АКПП. А значит, народный любимчик скоро возьмет еще одну рекордную вершину – не сомневайтесь! Мы протестировали сразу два Duster с «автоматами» в версиях 4х4 и 4х2, поскольку коробки у них, как выяснилось, все-таки несколько разные.
Монопривод.
Немного места для разгона – и передний привод поспевает за полным

ПОДДЕРЖКА СНИЗУ
Автоматическая коробка для полноприводного Duster разрабатывалась специально под российский рынок. Французы не стали ориентироваться на Индию и Бразилию. Они посмотрели, как гоняют у нас, и поняли, что старый «ниссановский» «автомат» в таких условиях долго не протянет. Пришлось сделать дополнительную систему охлаждения и изменить передаточные числа трансмиссии. Теперь коробка дольше держит низшую передачу, не торопясь переключаться вверх. Это я почувствовал сразу, едва оказался за рулем «русифицированного» Duster на ледяном полигоне, где мы с коллегами из школы экстремального вождения устроили «братьям» тестовые забеги.


В СКОЛЬЖЕНИИ
Разгоняюсь по скользкой прямой до 50 км/ч. Полноприводный внедорожник идет уверенно. Приближается поворот. Сбрасываю скорость, но автомобиль все еще слишком быстр. Лед! А железное ограждение трека уже в пятнадцати метрах. Впереди небольшой кусочек снега. Поймав его, резко выворачиваю руль, чтобы развернуть корпус на 90 градусов, иначе не вписаться. Балансирую на педали газа от середины до трех четвертей ее хода. Аналогичные манипуляции с рулевым колесом – ловлю обратную связь между половиной и четвертью оборота баранки. На выходе из виража газ уже полностью в пол, только руль не успеваю зафиксировать точно в нуле. Быстро исправляю ошибку, и вот снова прямая. Уверенно, азартно, легко – мне понравилось!

Пересаживаюсь в переднеприводную версию. Тот же поворот. Резко бью по тормозу – с АBS на льду иначе нельзя. Цепляюсь за снежный островок, выворачиваю руль, и… что-то не так. Автомобиль сносит намного дальше. Опасное заграждение совсем рядом. Наконец вмешивается система стабилизации и выравнивает машину. Однако передок неожиданно ныряет внутрь поворота. Отрабатываю педалью газа. Траектория спрямляется, но коробка переходит на повышенную передачу. Никакого эффектного выхода. Ни азарта, ни легкости, ни уверенности.

На выходе из виража газ уже в полу, только руль не успеваю зафиксировать точно в нуле. Быстро исправляю ошибку, и вот снова прямая. Уверенно, азартно, легко – мне понравилось!
ЭЛЕКТРОННЫЙ «ПОДПОР»
С передним приводом на льду обычно всегда проще. Он однозначный и предсказуемый, а полный, как правило, мечется между передне- и заднеприводными реакциями, чередуя снос с заносом. В этот раз все вышло не так. Во-первых, «автомат» Duster 4х4 работал четче и понятнее из-за новых настроек. Во-вторых, система стабилизации больше помогала именно полному приводу, а не переднему. Стрекот ESP вырывался из-под тормозных колодок 4х4 непрерывно. Чувствуя этот перманентный электронный «подпор», я мог правильно играть акселератором, балансируя на грани, что давало максимальную скорость и управляемость на льду. Оппонент же то включал ESP, то выключал, ослабляя тягу и переходя на передачу вверх, лишая тем самым меня определенности.

СВОБОДНАЯ ПРОГРАММА
Я ни в коем случае не приговариваю коробку и настройки электронных помощников версии 4х2. Уже через десяток заездов, приноровившись к их характеру, у меня все стало получаться не хуже, чем на полном приводе. Другое дело, что обычный водитель не всегда имеет возможность практиковаться на закрытом ледяном полигоне. С этой точки зрения побеждает все-таки полноприводный Duster. К тому же его «автомат» не только более драйверский, но и оснащен дополнительной воздушно-масляной системой охлаждения, а значит, надежнее при движении под нагрузкой – например, с прицепом или на офф-роуде. Особенно на крутых склонах и в грязи.

После трека мы, конечно же, заехали и на бездорожье, но продолжать там соревнования было просто глупо. Тем не менее стоит отметить, что превосходная геометрическая проходимость позволила Duster 4х2 добраться туда, где полноприводный кроссовер типа Qashqai давно бы уже осрамился. Он проезжал везде, где было место для небольшого разгона. Я вывешивал колеса, залезал на скользкие холмы, рыхлил сугробы и остался доволен результатами такого «факультатива».

Блокировка. На льду нужна однозначность реакций, поэтому муфту лучше заблокировать

Центральная панель. Об эргономике забыли. Управление климатом провалено из зоны видимости. Мультимедийный экран расположен слишком низко

Конфигурация. Проем багажного отделения имеет на редкость правильную форму

Детали. «Запаска» в багажнике. Трансформация салона – на троечку. Мотор не самый экономичный – 11.5 л на сотню

Разумный подход. Отделка салона вполне практичная
ТЕХНИЧЕСКИЕ ПОДРОБНОСТИ
В чем отличия версий Duster 4х4 и 4х2, кроме трансмиссий? У первой запасное колесо расположено в багажнике, у второй – под днищем, что менее удобно. У полноприводной версии система стабилизации отключаемая, у переднеприводной – нет, что создает определенные трудности. Первая весит на 100 кг больше и разгоняется до сотни на полсекунды медленнее. Ее дорожный просвет – 210 мм, у 4х2 – 205 мм. Задняя подвеска полноприводного Duster независимая многорычажная, а переднеприводного – полузависимая. Оба автомобиля, что мы тестировали, имели двухлитровые бензиновые моторы с технологией распределенного впрыска и автоматические четырехскоростные коробки передач.

Благодарим клуб безопасного вождения «Экстрим драйв» (www.extrimdrive.ru)
и Андрея Лунина за помощь в проведении тест-драйва
media.club4x4.ru
На все колеса: 4×4 | Журнал Популярная Механика
Этой статьей мы открываем серию публикаций о том, как устроен и как работает современный автомобиль
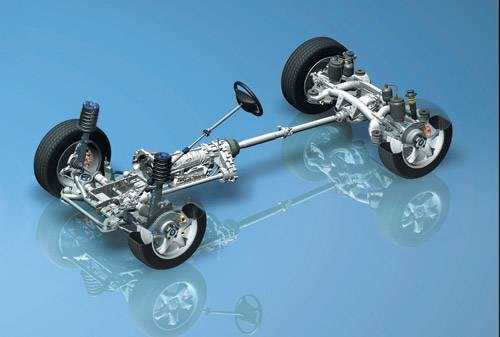
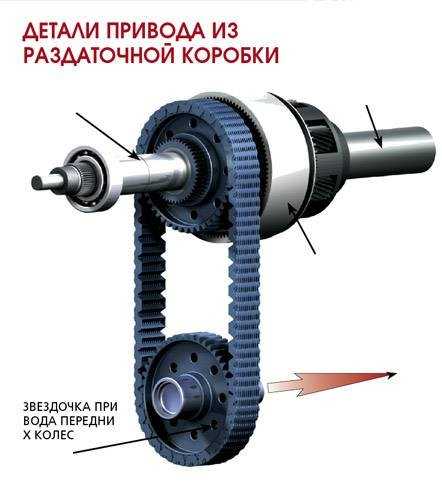
Детали привода из раздаточной коробки Volkswagen Touareg
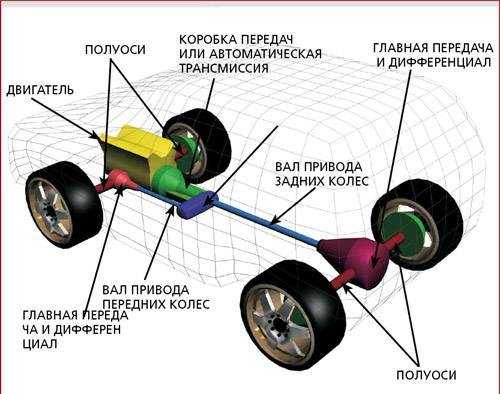
Компоненты полного привода
В наше время трудно застать кого-то врасплох вопросом про «полноприводный автомобиль». Вам тут же укажут на проезжающий мимо внедорожник, благо подобной техники на улицах наших городов более чем достаточно. А разбирающиеся еще добавят, что полноприводными бывают и обычные легковые автомобили (чаще всего упоминаются Audi и Subaru). И что полный привод может быть «постоянным» и «подключаемым».
Вопрос «А зачем?» встречает, как правило, один ответ: «Для лучшей проходимости». Впрочем, постоянные читатели автомобильной прессы еще осведомлены о «лучшей устойчивости на скользкой дороге».
Все это, как говорится, верно, но не совсем. Поэтому мы сегодня попытаемся привести в систему наши знания о приводе на все колеса. Точнее, начнем приводить, ибо тема эта, как и весь современный автомобиль, практически неисчерпаема.
Делить на большее
Что движет автомобиль? Двигатель вращает колеса, а они уже отталкиваются от дороги — так же, как мы, когда делаем очередной шаг вперед. В том месте, где шина соприкасается с дорогой (назовем его «пятно контакта»), создаваемый двигателем крутящий момент превращается в силу тяги колеса. Однако если сила тяги окажется больше, чем сила сцепления шины с дорогой, колесо будет проскальзывать — буксовать.
Понятно, что если у автомобиля два ведущих колеса, то все усилие, создаваемое двигателем, распределяется между двумя пятнами контакта.
А если четыре? Тогда между четырьмя. Чем больше ведущих колес, тем меньшая сила тяги приходится на каждое колесо, на каждое пятно контакта. А это значит, что при том же сцеплении шин с дорогой мы можем развить гораздо большую суммарную силу тяги, то есть быстрей разгоняться, въезжать на более крутые подъемы, буксировать более тяжелый прицеп. Или наоборот — при той же (или даже большей) силе тяги сможем уверенно передвигаться по гораздо более скользкому покрытию.
В общем-то, простая физика. И понятно, что дорожному автомобилю все это может пригодиться ничуть не меньше, чем машине высокой проходимости.
Устойчивость имеет ко всему этому самое непосредственное отношение. Ведь благодаря сцеплению шин с дорогой автомобиль не только разгоняется, но и останавливается, меняет направление движения, да и вообще стоит на дороге, а не валяется в кювете после первого же поворота. Однако чем большая продольная сила, действует в пятне контакта, тем меньшей поперечной силы будет достаточно, чтобы сорвать колесо в боковое скольжение. А уж буксующее колесо боковую нагрузку практически не воспринимает.
Ну и, конечно, можно представить себе немало различных ситуаций, когда практическая польза полного привода проявляется уже просто в том, что любое колесо является ведущим. Например, несколько колес вдруг оказались в условиях очень плохого сцепления с грунтом — на снегу, льду, в грязи. Или вообще «болтаются» в воздухе (и такое бывает при движении по пересеченной местности).
В подобном случае мы можем рассчитывать только на то, что колеса, которые сохраняют сцепление с опорной поверхностью, тоже являются ведущими.
Однако за преимущества полного привода приходится платить — усложнением (и удорожанием) конструкции, увеличением массы машины (а значит, и расхода топлива), уменьшением полезного пространства, отводящегося для пассажиров и груза. Ведь чтобы колеса стали ведущими, к ним нужно подвести крутящий момент от двигателя. А значит, появятся дополнительные агрегаты — раздаточные коробки (как минимум одна), главные передачи с дифференциалами (по одной на каждую ведущую ось), приводные валы. И поэтому на протяжении большей части XX столетия привод на все колеса получал широкое распространение в основном только там, где обойтись без него было просто невозможно, — в машинах высокой проходимости.
Но в большинстве из них полный привод использовался лишь время от времени — только в тяжелых условиях. Все остальное время бездействующие агрегаты возились с собой как бесполезный груз, лишь ухудшающий динамику автомобиля и увеличивающий расход топлива. Почему?
Его величество дифференциал
Еще на заре эпохи самодвижущихся экипажей, когда ведущие колеса закреплялись на общей жесткой оси, конструкторы столкнулись с тем, что крутой поворот становился для автомобиля непреодолимым препятствием. Ведь при прохождении поворота «наружное» колесо проходит больший путь, чем «внутреннее» (за то же самое время), а значит, должно вращаться с большей скоростью. Либо должно пробуксовывать внутреннее колесо, что маломощные первые двигатели обеспечить не могли — и попросту глохли. А если и хватало мощности двигателя, то автомобиль в поворотах постоянно заносило, очень быстро изнашивались шины, из-за возникающих нагрузок ломались оси. И потому довольно быстро единая ось ведущих колес была заменена двумя полуосями, между которыми появился дифференциал, планетарный механизм, обеспечивающий правое и левое колесо равным крутящим моментом, но позволяющий им вращаться с разной скоростью.
Но дело-то в том, что передние и задние колеса при повороте тоже проходят разные расстояния.
Более того, в реальных условиях движения они могут проходить разные расстояния и на прямой, ведь на дорогах встречаются неровности. А это значит, что если мы делаем автомобиль полноприводным, то в нем должен быть предусмотрен еще один дифференциал — между передней и задней осями. Иначе шины будут быстро изнашиваться, а нагрузки, возникшие в приводе, приведут его в негодность.
Конечно, межосевой дифференциал — это усложнение и удорожание конструкции и, опять же, лишняя масса. И без него, в принципе, можно обойтись, но при одном условии: приводом на все колеса мы будем пользоваться только на достаточно скользких покрытиях и при небольших скоростях, когда серьезных неприятностей для шин и привода не возникает. А на твердой дороге придется оставлять лишь одну ведущую ось.
В начале и середине прошлого века такой подход устраивал. Схема полного привода без межосевого дифференциала (с жесткой связью в раздаточной коробке и отключением одного из ведущих мостов) была популярна на внедорожной технике вплоть до конца XX века. Собственно, она дожила и до наших дней, модернизировавшись насколько возможно.
Теперь для подключения «дополнительного» ведущего моста не надо останавливаться (в англоязычной литературе это называется «shiftonthefly»). Сейчас привод с подключаемым передним мостом используется в Isuzu Trooper с механической коробкой передач, в Jeep Wrangler, в Mitsubishi Pajero Sport и многих других автомобилях.
Всегда — полный!
Но одно дело — «просто внедорожники». Их потребителей вполне устраивали основные преимущества схемы с отключаемым мостом — относительная простота и, соответственно, дешевизна, а вопросы скоростного передвижения по асфальту их волновали мало. Совсем другое — когда полноприводный автомобиль не «покоритель лугов и пустынь», а транспортное средство для повседневного использования (причем большей частью по нормальным дорогам). В этой ситуации на первый план выходят недостатки. Во‑первых, невозможность постоянного использования преимуществ полного привода (ведь при движении по твердым покрытиям ведущей остается только одна ось). Во‑вторых, повышенные требования к квалификации водителя: он должен правильно оценивать обстановку и принимать решение, включать дополнительный мост или не включать. А ошибки чреваты неприятными последствиями: превращение автомобиля в полноприводный мгновенно меняет не только проходимость, но и управляемость.
Так что в последнее время гораздо чаще находит применение постоянный полный привод с межосевым дифференциалом. Такая схема у большинства полноприводных легковых автомобилей и последних моделей внедорожников (все Audi quattro, кроме A3; все BMW iX, а также X5; Hyundai Santa Fe; Jaguar XType; все Mercedes-Benz 4matic, M и G-класса; Mitsubishi Pajero — в общем, полный список может занять весь выделенный для статьи объем).
Однако и «дифференциальный» привод не лишен недостатков.
Во-первых, на скользком покрытии дифференциал вполне может подвести. Вам приходилось наблюдать со стороны за автомобилем, забуксовавшим в снегу или жидкой грязи? Тогда вы должны были заметить: в то время как буксующее колесо бешено вращается, другое практически не делает попыток сдвинуться с места. Виноват в этом дифференциал. И точно так же будет вести себя межосевой дифференциал, когда колеса одной из осей окажутся на скользкой поверхности. Чтобы этого не происходило, полноприводные автомобили (особенно высокой проходимости) приходится оборудовать устройствами блокировки дифференциалов. Понятно, что система привода не становится от этого проще и дешевле.
Кроме того, раздаточная коробка и дополнительные приводные валы по‑прежнему утяжеляют машину и занимают много места. И если для больших автомобилей с мощными двигателями все это не так уж и существенно, то у легковых, особенно компактных, серьезно страдают динамика, экономичность и вместимость.
По мере необходимости
Не без «помощи» компактных легковых автомобилей родилась еще одна концепция полного привода, используемая на многих современных машинах. В западной литературе она называется «torqueondemand» (или просто «on demand») — «момент по необходимости».
Идея в том, чтобы к простому (без межосевого дифференциала) приводу с отключаемым мостом добавить некое автоматическое устройство, подключающее его в случае необходимости (скажем, при пробуксовке «основных» ведущих колес). А еще лучше — передающее на «дополнительный» мост ровно столько крутящего момента, сколько необходимо.
Конечно, такая схема уступает постоянному полному приводу, зато конструктивно проще, а главное, очень удобна для того, чтобы сделать полноприводным небольшой автомобиль.
Ведь когда двигатель впереди и «основные» ведущие колеса передние, можно даже отказаться от отдельной раздаточной коробки — достаточно сделать простой отбор мощности к заднему мосту, а передним установить то самое автоматическое устройство. Такой привод получается компактным и довольно легким, а потому очень популярен среди легковых моделей (Audi A3; Volvo AWD и XC; Volkswagen Golf 4Motion и т. д.), а также моделей «промежуточных» классов (Ford Maverick, Honda CRV; Nissan X-Trail; Volvo XC 90 и др.).
Первые системы «on demand» создавались на основе муфты вязкостного трения (до последнего времени еще сохранялась на полноприводных Volvo V70, до сих пор устанавливается на Chrysler Voyager AWD, Land Rover Freelander и некоторые Mitsubishi Pajero Pinin). Позже было предложено еще несколько относительно простых гидравлико-механических устройств, работающих без какого-либо вмешательства извне. Их конструкции и принципам действия мы предполагаем посвятить отдельные материалы.
Но у всех простых муфт с «внутренним автоматизмом» есть существенные недостатки. Во‑первых, они срабатывают уже по факту пробуксовки, что может оказаться уже поздновато. Во‑вторых, их характеристика (скорость срабатывания, зависимость передаваемого момента от скорости буксования и т. п.) определяется конструкцией и не может быть изменена без разборки (которая, зачастую, возможна лишь в заводских условиях). А это означает, что об адаптации к конкретным условиям движения говорить уже не приходится.
И поскольку микропроцессорная техника в последние годы значительно подешевела, в системах «on demand» все чаще используют устройства с компьютерным управлением. Они регулируют момент, передаваемый на «дополнительный» мост уже не только в зависимости от текущей ситуации, но и на основе прогноза ее развития. Возможности управляемых электроникой систем очень широки. И потому они все чаще находят применение вместо межосевого дифференциала в раздаточных коробках больших мощных моделей (Chevrolet Tahoe и TrailBlazer; Infiniti FX и др.).
Статья опубликована в журнале «Популярная механика» (№6, Июнь 2003).www.popmech.ru
Что означает «4х4» на внедорожниках???))
Это значит, что если попадешь в серьезное дтп, то тебя так расплющит, что придется копать не 2Х2, а 4Х4 вместе с внедорожником. Так проще.
полный привод на все 4 колеса
полный привод
4*4=16л на 100км. Можетбыть о нет постоянный полный =(
Это колесная формула-4 колеса-4 из них ведущие, например на обычных 10, 12 и т. д. она соответственно будет 4х2
вчетвером по 4 рюмки бальзама…)))
Это вместимость авто = 16 чел. )))
это значит, что в ней могу лечь 4 человека и вдоль и поперек
Если серьёзно, то все 4 колеса ведущие Если поржать, то у гадюки ответ класный
Полный поподос! 😉 <img src=»//otvet.imgsmail.ru/download/7d8b69797ea9fcc038d80af1a2f8ad7c_i-1432.jpg» >
Стоимость таких четырех колес дороже в четыре раза чем обычных .
touch.otvet.mail.ru
Что такое полный привод? Значение AWD, quattro, 4х4… / личный блог Staska / smotra.ru
Продолжу серию своих негавнопостов. Постараюсь вам коротко объяснить что такое полный привод. В мире есть множество маркировок — AWD, 4WD, 4×4, quattro, synchro, 4matic и т.д. Что же ето всё значит — читайте ниже.И так, в мире существуют только две системы — AWD и 4WD.
4х4 — ето объединённый термин для всех полноприводных автомобилей.
AWD — All Wheel Drive, ето система когда привод постоянно подаётса на все колёса. Такая система стоит больше на легковых авто.
4WD — Four Wheel Drive, ето система, когда привод подаётса на все колёса, но можно отключить переднюю или заднюю ось. Такая система стоит больше на внедорожниках (н.п. на Ниве).
Простая AWD система по проходимости хуже, чем перед или заднеприводные машины. Неверитса? Сечяс объясню почему.
В каждом автомобиле на ведущей оси стоит дифференциал, который направляет привод на то колесо, которому легче крутитса. Ето предназначено для того, чтоб на поворотах колёса нескрипелиб. 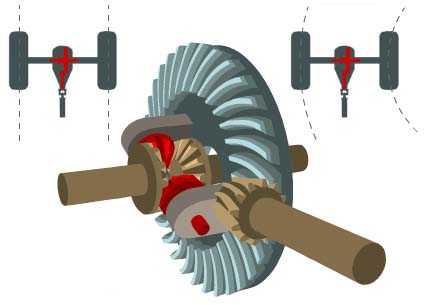 Подробно что такое дифференциал и как он работает читайте тут. Но у диффа есть одна проблема, так как если одно колесо потеряет сцепку с дорогой, оно и будет крутитса. Например, если у вас переднеприводная машина и вы её поставите так, чтоб одно колесо было на асфалте, а другое на льду, то машина непоедит или поедит меденно, так как то колесо, которое на льду — будет буксовать, неважно, что другое колесо имеет прекрасную сцепку с дорогой. Поетому принципу AWD система хуже чем привод на одну ось, потомучто одному колесу из четырёх больше шансов потерять сцепку с дорогой, чем одному из двух. И ето проблема. Но ету проблему разные марки изправляют по разному:
Подробно что такое дифференциал и как он работает читайте тут. Но у диффа есть одна проблема, так как если одно колесо потеряет сцепку с дорогой, оно и будет крутитса. Например, если у вас переднеприводная машина и вы её поставите так, чтоб одно колесо было на асфалте, а другое на льду, то машина непоедит или поедит меденно, так как то колесо, которое на льду — будет буксовать, неважно, что другое колесо имеет прекрасную сцепку с дорогой. Поетому принципу AWD система хуже чем привод на одну ось, потомучто одному колесу из четырёх больше шансов потерять сцепку с дорогой, чем одному из двух. И ето проблема. Но ету проблему разные марки изправляют по разному:
Ауди свою систему назвала QUATTRO. В ней стоят блокировки диференциалов. История полноприводных автомобилей начялась с легендарной победителницей ралли — Audi S1. В старых Ауди до 87г. блокировались как задний, так и центральный дифференциал, блокировалса он вручную и отключалась блокировка тоже вручную, поетому их очень ценят настоящие автомобилисты. 
Но так, как народ с временем становитса всё тупее и в Ауди поступали жалобы от владельцев, что у них быстро стираютса покрышки, так как они забывают выключить блокировку. Поетому с 87г. Ауди пош
smotra.ru