математика — могу ли я найти значение синуса значения косинуса без вычисления угла?
Задать вопрос
спросил
Изменено 10 лет, 2 месяца назад
Просмотрено 2к раз
Величина векторного произведения описывает площадь параллелограмма со знаком, описанного двумя векторами (u, v), используемыми для построения векторного произведения, и имеет свое применение. Эту же величину можно рассчитать как величину u, умноженную на величину v, умноженную на синус угла между u и v: ||u||||v||sin(тета).
Теперь скалярное произведение u (нормализованное) и v (нормализованное) дает косинус угла между u и v: cos(theta)==dot(normalize(u), normalize(v))
Я хочу иметь возможность получить значение синуса со знаком, связанное со значением косинуса.
Но для вычисления сопутствующего знака (+/-) требуется тета как угол: (cos(тета + PI/2)) > или == или < 0 Если мне нужно выполнить функцию acos, я мог бы просто выполнить перекрестное произведение и найти величину.
Существует ли известный коэффициент или шаг, который можно добавить к значению косинуса, чтобы получить связанное с ним значение синуса?
- математика
- игровой движок
- тригонометрия
- игровая физика
4 92) . Отрицательная область редко имеет смысл (только для определения ориентации относительно плоскости, например, для отбраковки обратной стороны)
Если у вас есть два вектора, используйте векторное произведение или скалярное произведение напрямую, а не другое, и конвертируйте.
2
Мне кажется сложным путь добраться до atan2 тождеств:
d = 𝐚·𝐛 = |𝐚||𝐛|cosθ
с = |𝐚×𝐛| = |𝐚||𝐛|sinθ (при 0° < θ < 180°)
tanθ = 𝐚·𝐛 / |𝐚×𝐛|
θ = atan2(c·sgn(c|z), d) (= четыре квадранта)
, где sgn(c|z) — знак z-компоненты в c (если только 𝐚 и 𝐛 не проходят точно параллельно плоскости xz или yz, тогда это знак y-компоненты и x-компоненты , соответственно).
Теперь, исходя из основных тригонометрических тождеств,
r = √(x²+y²) cos(atan2(y,x)) = x/r sin(atan2(y,x)) = y/r
Следовательно,
sinθ = c·sgn(c|z)/√(c²+d²) cosθ = d/√(c²+d²)
Кажется, я нашел решение.
cos(b) == sin(a) v_parallel = dot(normalize(u), v) // проекция v на u v_perp = нормализовать (v) - v_parallel cos(b) = dot(normalize(v), v_perp) // v_perp уже нормализован
Следовательно, величина
u cross v = величина (u) * величина (v) * cos (b)
2
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя адрес электронной почты и пароль
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Опубликовать как гость
Электронная почтаТребуется, но не отображается
Тригонометрические значения специальных углов
С учетом работы, проделанной в предыдущих разделах (особенно перечисленных ниже), 9\круг)\,$.
Все необходимые инструменты/идеи вкратце повторяются ниже.
Возникли проблемы с кратким обсуждением на этой странице?
Если да, пересмотрите
ссылки выше (по порядку) — они предлагают гораздо более медленный и более мягкий подход.
| два специальных треугольника | взаимные отношения для триггерных функций | |
S ине O напротив H ипотенуза С озин А дальний H ипотенуза Т агент O напротив А дальний | Например: $\displaystyle\csc = \frac{1}{\sin}$ | |
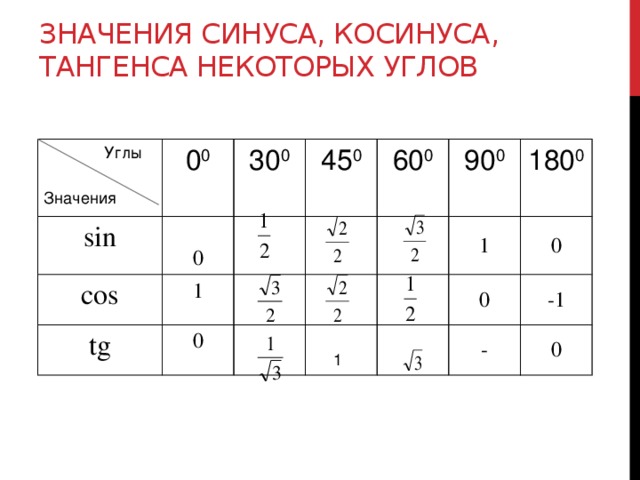
| угол/номер | синус $\displaystyle\sin = \frac{\text{OPP}}{\text{HYP}}$ | косинус $\displaystyle\cos = \frac{\text{ADJ}}{\text{HYP}}$ | тангенс $\displaystyle\tan = \frac{\text{OPP}}{\text{ADJ}}$ | котангенс (обратный | секанс (обратный | косеканс (обратный | 9\circ = \frac{\pi}{6} \text{рад}$$\displaystyle\frac 12$ | $\displaystyle\frac{\sqrt 3}2$ | $\displaystyle\frac1{\sqrt 3} = \frac{\sqrt 3}{3} $ | $\кв 3$ | $\displaystyle\frac{2}{\sqrt 3} = \frac{2\sqrt 3}{3}$ | $2$ | $\displaystyle\frac{\sqrt 3}{2}$ | $\displaystyle \frac{1}{2}$ | $\displaystyle\sqrt 3$ | $\displaystyle\frac1{\sqrt 3} = \frac{\sqrt 3}{3} $ | $2$ | $\displaystyle\frac{2}{\sqrt 3} = \frac{2\sqrt 3}{3}$ | 9\circ = \frac{\pi}{2} \text{ рад}$$1$ | $0$ | не определено | $0$ ($\cot := \frac{\cos}{\sin}$) | не определено | $1$ |
Обратные числа сохраняют знак ($+/-$) исходного числа. Следовательно, во всех квадрантах:
|
Тригонометрические значения для произвольных специальных углов
В особых треугольниках и общих тригонометрических значениях
метод «Найти знаки уменьшения/размера»
Имея в наличии дополнительные инструменты и терминологию, это обсуждение представлены здесь более широко и эффективно.
Метод RRQSS (Уменьшение ссылки/Размер квадранта/Знак)
| 9\circ\,$ или $\,-\frac{7\pi}{3}\,$), тогда вам может быть легко найти его опорный угол и квадрант без предварительного его «уменьшения».  Твой выбор!] Как обсуждалось в разделе «Опорные углы», удалите все дополнительные вращения от $\,\theta\,$:
| ||
| ССЫЛКА/КВАДРАНТ: Отложите $\,\theta\,$ стандартным способом:
 |