ОглавлениеПРЕДИСЛОВИЕАНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ НА ПЛОСКОСТИ § 1. Понятие о предмете аналитической геометрии § 2. Координаты § 3. Прямоугольная система координат § 4. Прямоугольные координаты § 5. Координатные углы § 6. Косоугольная система координат § 7. Уравнение линии § 8. Взаимное расположение линии и точки § 9.  § 10. Расстояние между двумя точками § 11. Деление отрезка в данном отношении § 11а. Деление отрезка пополам § 12. Определитель второго порядка § 13. Площадь треугольника § 14. Прямая линия; уравнение, разрешенное относительно ординаты (с угловым коэффициентом) § 15. Прямая, параллельная оси § 16. Общее уравнение прямой § 17. Построение прямой по ее уравнению § 18. Условие параллельности прямых § 19. Пересечение прямых § 20. Условие перпендикулярности двух прямых § 21. Угол между двумя прямыми § 22. Условие, при котором три точки лежат на одной прямой § 23. Уравнение прямой, проходящей через две точки § 24. Пучок прямых § 25. Уравнение прямой, проходящей через данную точку параллельно данной прямой § 26. Уравнение прямой, проходящей через данную точку перпендикулярно данной прямой § 27. Взаимное расположение прямой и пары точек § 28. Расстояние от точки до прямой § 29. Полярные параметры прямой § 30.  2+bx+c 2+bx+c§ 51. Директрисы эллипса и гиперболы § 52. Общее определение эллипса, гиперболы и параболы § 53. Конические сечения § 54. Диаметры конического сечения § 55. Диаметры эллипса § 56. Диаметры гиперболы § 57. Диаметры параболы § 58. Линии второго порядка § 59. Запись общего уравнения второй степени § 60. Упрощение уравнения второй степени; общие замечания § 61. Предварительное преобразование уравнения второй степени § 62. Завершающее преобразование уравнения второй степени § 63. О приемах, облегчающих упрощение уравнения второй степени § 64. Признак распадения линий второго порядка § 65. Нахождение прямых, составляющих распадающуюся линию второго порядка § 66. Инварианты уравнения второй степени § 67. Три типа линий второго порядка § 68. Центральные и нецентральные линии второго порядка § 70. Упрощение уравнения центральной линии второго порядка § 71. 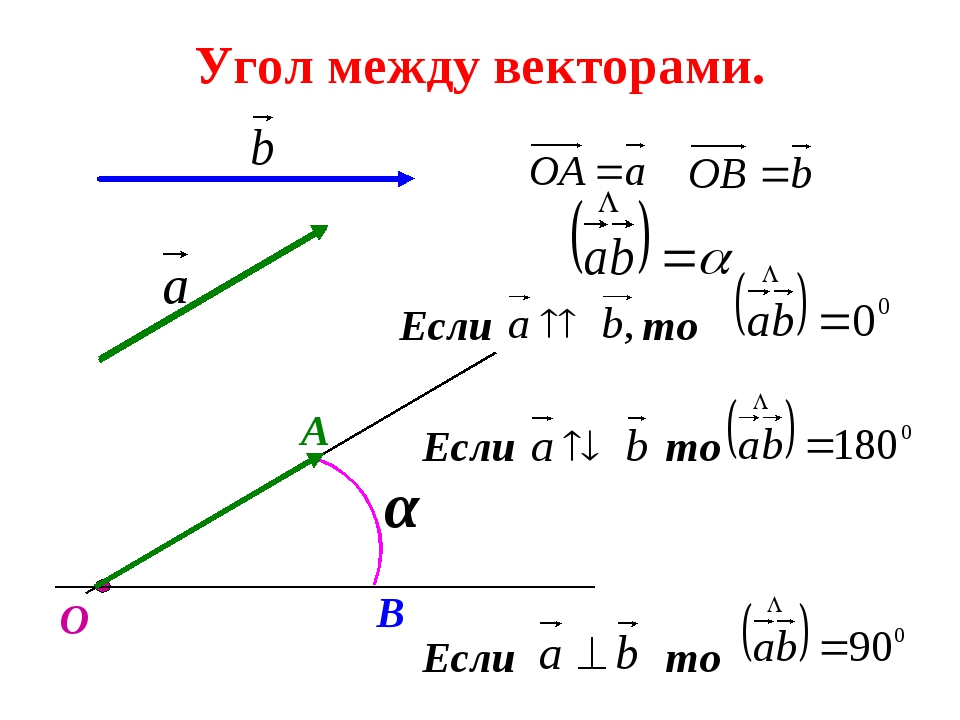 Равносторонняя гипербола как график уравнения y=k/x Равносторонняя гипербола как график уравнения y=k/x§ 72. Равносторонняя гипербола как график уравнения y=(mx+n)/(px+q) § 73. Полярные координаты § 74. Связь между полярными и прямоугольными координатами § 75. Архимедова спираль § 76. Полярное уравнение прямой § 77. Полярное уравнение конического сечения АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ § 78. Понятие о векторах и скалярах § 79. Вектор в геометрии § 80. Векторная алгебра § 81. Коллинеарные векторы § 82. Нуль-вектор § 83. Равенство векторов § 84. Приведение векторов к общему началу § 85. Противоположные векторы § 86. Сложение векторов § 87. Сумма нескольких векторов § 88. Вычитание векторов § 89. Умножение и деление вектора на число § 90. Взаимная связь коллинеарных векторов (деление вектора на вектор) § 91. Проекция точки на ось § 92. Проекция вектора на ось § 93. Основные теоремы о проекциях вектора § 94. Прямоугольная система координат в пространстве § 95.  Координаты точки Координаты точки§ 96. Координаты вектора § 97. Выражения вектора через компоненты и через координаты § 98. Действия над векторами, заданными своими координатами § 99. Выражение вектора через радиусы-векторы его начала и конца § 100. Длина вектора. Расстояние между двумя точками § 101. Угол между осью координат и вектором § 102. Признак коллинеарности (параллельности) векторов § 103. Деление отрезка в данном отношении § 104. Скалярное произведение двух векторов § 104а. Физический смысл скалярного произведения § 105. Свойства скалярного произведения § 107. Выражение скалярного произведения через координаты сомножителей § 108. Условие перпендикулярности векторов § 109. Угол между векторами § 110. Правая и левая системы трех векторов § 111. Векторное произведение двух векторов § 112. Свойства векторного произведения § 113. Векторные произведения основных векторов § 114.  Выражение векторного произведения через координаты сомножителей Выражение векторного произведения через координаты сомножителей§ 115. Компланарные векторы § 116. Смешанное произведение § 117. Свойства смешанного произведения § 118. Определитель третьего порядка § 119. Выражение смешанного произведения через координаты сомножителей § 120. Признак компланарности в координатной форме § 121. Объем параллелепипеда § 122. Двойное векторное произведение § 123. Уравнение плоскости § 124. Особые случаи положения плоскости относительно системы координат § 125. Условие параллельности плоскостей § 126. Условие перпендикулярности плоскостей § 127. Угол между двумя плоскостями § 128. Плоскость, проходящая через данную точку параллельно данной плоскости § 129. Плоскость, проходящая через три точки § 130. Отрезки на осях § 131. Уравнение плоскости в отрезках § 132. Плоскость, проходящая через две точки перпендикулярно данной плоскости § 133. Плоскость, проходящая через данную точку перпендикулярно двум плоскостям § 134. 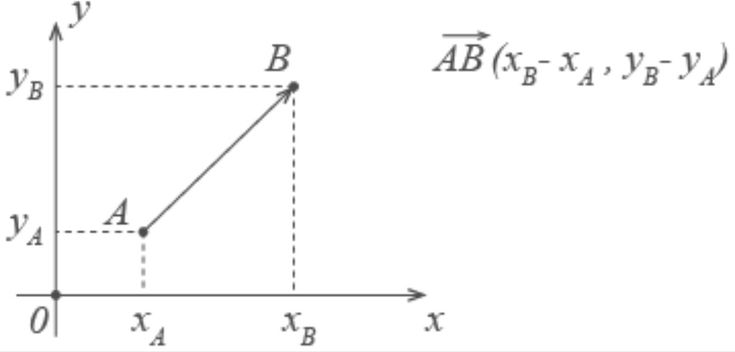 Точка пересечения трех плоскостей Точка пересечения трех плоскостей§ 135. Взаимное расположение плоскости и пары точек § 136. Расстояние от точки до плоскости § 137. Полярные параметры плоскости § 138. Нормальное уравнение плоскости § 139. Приведение уравнения плоскости к нормальному виду § 140. Уравнения прямой в пространстве § 142. Пересечение прямой с плоскостью § 143. Направляющий вектор § 144. Углы между прямой и осями координат § 145. Угол между двумя прямыми § 146. Угол между прямой и плоскостью § 147. Условия параллельности и перпендикулярности прямой и плоскости § 148. Пучок плоскостей § 149. Проекции прямой на координатные плоскости § 150. Симметричные уравнения прямой § 151. Приведение уравнений прямой к симметричному виду § 152. Параметрические уравнения прямой § 153. Пересечение плоскости с прямой, заданной параметрически § 154. Уравнения прямой, проходящей через две данные точки § 155.  Уравнение плоскости, проходящей через данную точку перпендикулярно данной прямой Уравнение плоскости, проходящей через данную точку перпендикулярно данной прямой§ 156. Уравнения прямой, проходящей через данную точку перпендикулярно данной плоскости § 157. Уравнение плоскости, проходящей через данную точку и данную прямую § 158. Уравнение плоскости, проходящей через данную точку и параллельной двум данным прямым § 159. Уравнение плоскости, проходящей через данную прямую и параллельной другой данной прямой § 160. Уравнение плоскости, проходящей через данную прямую и перпендикулярной данной плоскости § 161. Уравнения перпендикуляра, опущенного из данной точки на данную прямую § 162. Длина перпендикуляра, опущенного из данной точки на данную прямую § 163. Условие, при котором две прямые пересекаются или лежат в одной плоскости § 164. Уравнения общего перпендикуляра к двум данным прямым § 165. Кратчайшее расстояние между двумя прямыми § 165а. Правые и левые пары прямых § 166. Преобразование координат § 167. Уравнение поверхности § 168.  Цилиндрические поверхности, у которых образующие параллельны одной из осей координат Цилиндрические поверхности, у которых образующие параллельны одной из осей координат§ 170. Проекция линии на координатную плоскость § 171. Алгебраические поверхности и их порядок § 172. Сфера § 173. Эллипсоид § 174. Однополостный гиперболоид § 175. Двуполостный гиперболоид § 176. Конус второго порядка § 177. Эллиптический параболоид § 178. Гиперболический параболоид § 179. Перечень поверхностей второго порядка § 180. Прямолинейные образующие поверхностей второго порядка § 181. Поверхности вращения § 182. Определители второго и третьего порядков § 183. Определители высших порядков § 184. Свойства определителей § 185. Практический прием вычисления определителей § 186. Применение определителей к исследованию и решению системы уравнений § 187. Два уравнения с двумя неизвестными § 188. Два уравнения с двумя неизвестными § 189. Однородная система двух уравнений с тремя неизвестными § 190.  Два уравнения с двумя неизвестными Два уравнения с двумя неизвестными§ 190а. Система n уравнений с n неизвестными ОСНОВНЫЕ ПОНЯТИЯ МАТЕМАТИЧЕСКОГО АНАЛИЗА § 192. Рациональные числа § 193. Действительные (вещественные) числа § 194. Числовая ось § 195. Переменные и постоянные величины § 196. Функция § 197. Способы задания функции § 198. Область определения функции § 199. Промежуток § 200. Классификация функций § 201. Основные элементарные функции § 202. Обозначение функции § 203. Предел последовательности § 204. Предел функции § 205. Определение предела функции § 206. Предел постоянной величины § 207. Бесконечно малая величина § 208. Бесконечно большая величина § 209. Связь между бесконечно большими и бесконечно малыми величинами § 210. Ограниченные величины § 211. Расширение понятия предепа § 212. Основные свойства бесконечно малых величин § 213. Основные теоремы о пределах § 215. Предел sinx/x при x стремящемся к 0 § 216.  Эквивалентные бесконечно малые величины Эквивалентные бесконечно малые величины§ 217. Сравнение бесконечно малых величин § 217а. Приращение переменной величины § 218. Непрерывность функции в точке § 219. Свойства функций, непрерывных в точке § 219а. Односторонний предел; скачок функции § 220. Непрерывность функции на замкнутом промежутке § 221. Свойства функций, непрерывных на замкнутом промежутке ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ § 223. Скорость § 224. Определение производной функции § 225. Касательная § 226. Производные некоторых простейших функций § 227. Свойства производной § 228. Дифференциал § 229. Механический смысл дифференциала § 230. Геометрический смысл дифференциала § 231. Дифференцируемые функции § 232. Дифференциалы некоторых простейших функций § 233. Свойства дифференциала § 234. Инвариантность выражения f'(x)dx § 235. Выражение производной через дифференциалы § 236. Функция от функции (сложная функция) § 237. Дифференциал сложной функции § 238.  Производная сложной функции Производная сложной функции§ 239. Дифференцирование произведения § 240. Дифференцирование частного (дроби) § 241. Обратная функция § 242. Натуральные логарифмы § 243. Дифференцирование логарифмической функции § 244. Логарифмическое дифференцирование § 245. Дифференцирование показательной функции § 246. Дифференцирование тригонометрических функций § 247. Дифференцирование обратных тригонометрических функций § 247а. Некоторые поучительные примеры § 248. Дифференциал в приближенных вычислениях § 249. Применение дифференциала к оценке погрешности формул § 250. Дифференцирование неявных функций § 251. Параметрическое задание линии § 252. Параметрическое задание функции § 253. Циклоида § 254. Уравнение касательной к плоской линии § 254а. Касательные к кривым второго порядка § 255. Уравнение нормали § 256. Производные высших порядков § 257. Механический смысл второй производной § 258. Дифференциалы высших порядков § 259.  Выражение высших производных через дифференциалы Выражение высших производных через дифференциалы§ 260. Высшие производные функций, заданных параметрически § 261. Высшие производные неявных функций § 262. Правило Лейбница § 263. Теорема Ролля § 264. Теорема Лагранжа о среднем значении § 265. Формула конечных приращений § 266. Обобщенная теорема о среднем значении (Коши) § 267. Раскрытие неопределенности вида 0/0 § 268. Раскрытие неопределенности вида бесконесность на бесконечность § 269. Неопределенные выражения других видов § 270. Исторические сведения о формуле Тейлора § 271. Формула Тейлора § 272. Применение формулы Тейлора к вычислению значений функции § 273. Возрастание и убывание функции § 274. Признаки возрастания и убывания функции в точке § 274а. Признаки возрастания и убывания функции в промежутке § 275. Максимум и минимум § 276. Необходимое условие максимума и минимума § 277. Первое достаточное условие максимума и минимума § 278. Правило нахождения максимумов и минимумов § 279.  Второе достаточное условие максимума и минимума Второе достаточное условие максимума и минимума§ 280. Нахождение наибольшего и наименьшего значений функции § 281. Выпуклость плоских кривых; точка перегиба § 282. Сторона вогнутости § 283. Правило для нахождения точек перегиба § 284. Асимптоты § 285. Нахождение асимптот, параллельных координатным осям § 286. Нахождение асимптот, не параллельных оси ординат § 287. Приемы построения графиков § 288. Решение уравнений. Общие замечания § 289. Решение уравнений. Способ хорд § 290. Решение уравнений. Способ касательных § 291. Комбинированный метод хорд и касательных ИНТЕГРАЛЬНОЕ ИСЧИСЛЕНИЕ § 293. Первообразная функция § 294. Неопределенный интеграл § 295. Геометрический смысл интегрирования § 296. Вычисление постоянной интегрирования по начальным данным § 297. Свойства неопределенного интеграла § 298. Таблица интегралов § 299. Непосредственное интегрирование § 300. Способ подстановки (интегрирование через вспомогательную переменную) § 301.  Интегрирование по частям Интегрирование по частям§ 302. Интегрирование некоторых тригонометрических выражений § 303. Тригонометрические подстановки § 304. Рациональные функции § 304а. Исключение целой части § 305. О приемах интегрирования рациональных дробей § 306. Интегрирование простейших рациональных дробей § 307. Интегрирование рациональных функций (общий метод) § 308. О разложении многочлена на множители § 309. Об интегрируемости в элементарных функциях § 310. Некоторые интегралы, зависящие от радикалов § 311. Интеграл от биномиального дифференциала § 312. Интегралы вида … § 313. Интегралы вида S R(sinx, cosx)dx § 314. Определенный интеграл § 315. Свойства определенного интеграла § 316. Геометрический смысл определенного интеграла § 317. Механический смысл определенного интеграла § 318. Оценка определенного интеграла § 318а. Неравенство Буняковского § 319. Теорема о среднем интегрального исчисления § 320. Определенный интеграл как функция верхнего предела § 321.  Дифференциал интеграла Дифференциал интеграла§ 322. Интеграл дифференциала. Формула Ньютона — Лейбница § 323. Вычисление определенного интеграла с помощью неопределенного § 324. Определенное интегрирование по частям § 325. Способ подстановки в определенном интеграле § 326. О несобственных интегралах § 327. Интегралы с бесконечными пределами § 328. Интеграл функции, имеющей разрыв § 329. О приближенном вычислении интеграла § 330. Формулы прямоугольников § 331. Формула трапеций § 332. Формула Симпсона (параболических трапеций) § 333. Площади фигур, отнесенных к прямоугольным координатам § 334. Схема применения определенного интеграла § 335. Площади фигур, отнесенных к полярным координатам § 336. Объем тела по поперечным сечениям § 337. Объем тела вращения § 338. Длина дуги плоской линии § 339. Дифференциал дуги § 340. Длина дуги и ее дифференциал в полярных координатах § 341. Площадь поверхности вращения ОСНОВНЫЕ СВЕДЕНИЯ О ПЛОСКИХ И ПРОСТРАНСТВЕННЫХ ЛИНИЯХ § 342.  Кривизна Кривизна§ 343. Центр, радиус и круг кривизны плоской линии § 344. Формулы для кривизны, радиуса и центра кривизны плоской линии § 345. Эволюта плоской линии § 346. Свойства эволюты плоской линии § 347. Развертка (эвольвента) плоской линии § 348. Параметрическое задание пространственной линии § 349. Винтовая линия § 350. Длина дуги пространственной линии § 351. Касательная к пространственной линии § 352. Нормальная плоскость § 353. Вектор-функция скалярного аргумента § 354. Предел вектор-функции § 355. Производная вектор-функции § 356. Дифференциал вектор-функции § 357. Свойства производной и дифференциала вектор-функции § 358. Соприкасающаяся плоскость § 359. Главная нормаль. Сопутствующий трехгранник § 360. Взаимное расположение линии и плоскости § 361. Основные векторы сопутствующего трехгранника § 362. Центр, ось и радиус кривизны пространственной линии § 363. Формулы для кривизны, радиуса и центра кривизны пространственной линии § 364.  О знаке кривизны О знаке кривизны§ 365. Кручение РЯДЫ § 367. Определение ряда § 368. Сходящиеся и расходящиеся ряды § 369. Необходимое условие сходимости ряда § 370. Остаток ряда § 371. Простейшие действия над рядами § 372. Положительные ряды § 373. Сравнение положительных рядов § 374. Признак Даламбера для положительного ряда § 375. Интегральный признак сходимости § 376. Знакопеременный ряд. Признак Лейбница § 377. Абсолютная и условная сходимость § 378. Признак Даламбера для произвольного ряда § 379. Перестановка членов ряда § 380. Группировка членов ряда § 381. Умножение рядов § 382. Деление рядов § 383. Функциональный ряд § 384. Область сходимости функционального ряда § 385. О равномерной и неравномерной сходимости § 386. Определение равномерной и неравномерной сходимости § 387. Геометрический смысл равномерной и неравномерной сходимости § 388. Признак равномерной сходимости; правильные ряды § 389. Непрерывность суммы ряда § 390. 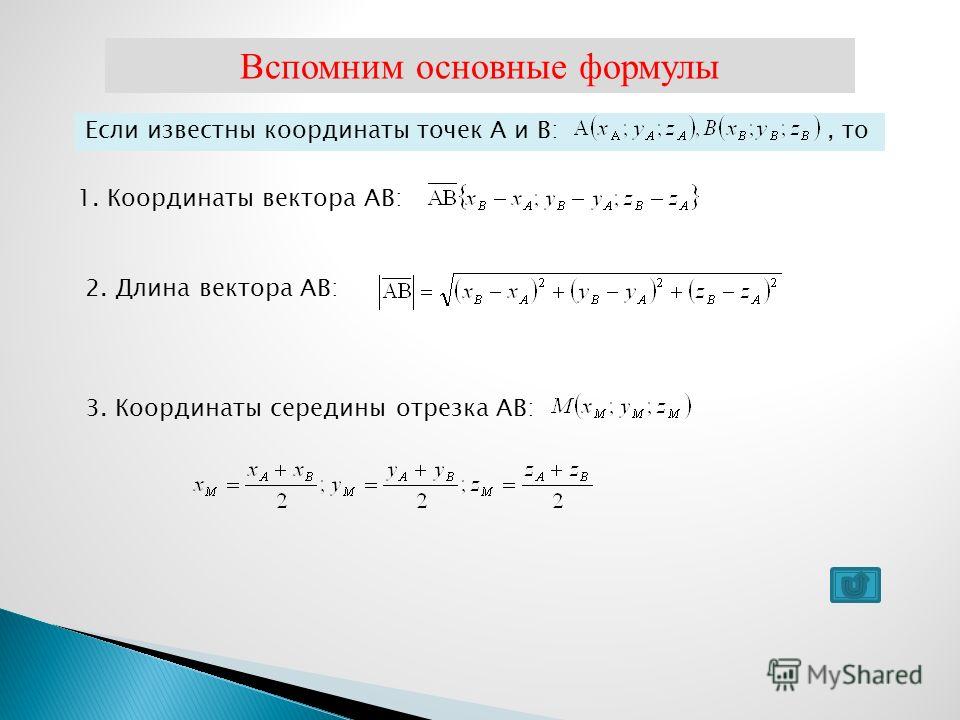 Интегрирование рядов Интегрирование рядов§ 391. Дифференцирование рядов § 392. Степенной ряд § 393. Промежуток и радиус сходимости степенного ряда § 394. Нахождение радиуса сходимости § 395. Область сходимости ряда, расположенного по степеням х – х0 § 396. Теорема Абеля § 397. Действия со степенными рядами § 398. Дифференцирование и интегрирование степенного ряда § 399. Ряд Тейлора § 400. Разложение функции в степенной ряд § 401. Разложение элементарных функций в степенные ряды § 402. Применение рядов к вычислению интегралов § 403. Гиперболические функции § 404. Обратные гиперболические функции § 405. Происхождение наименований гиперболических функций § 406. О комплексных числах § 407. Комплексная функция действительного аргумента § 408. Производная комплексной функции § 409. Возведение положительного числа в комплексную степень § 410. Формула Эйлера § 411. Тригонометрический ряд § 412. Исторические сведения о тригонометрических рядах § 413. 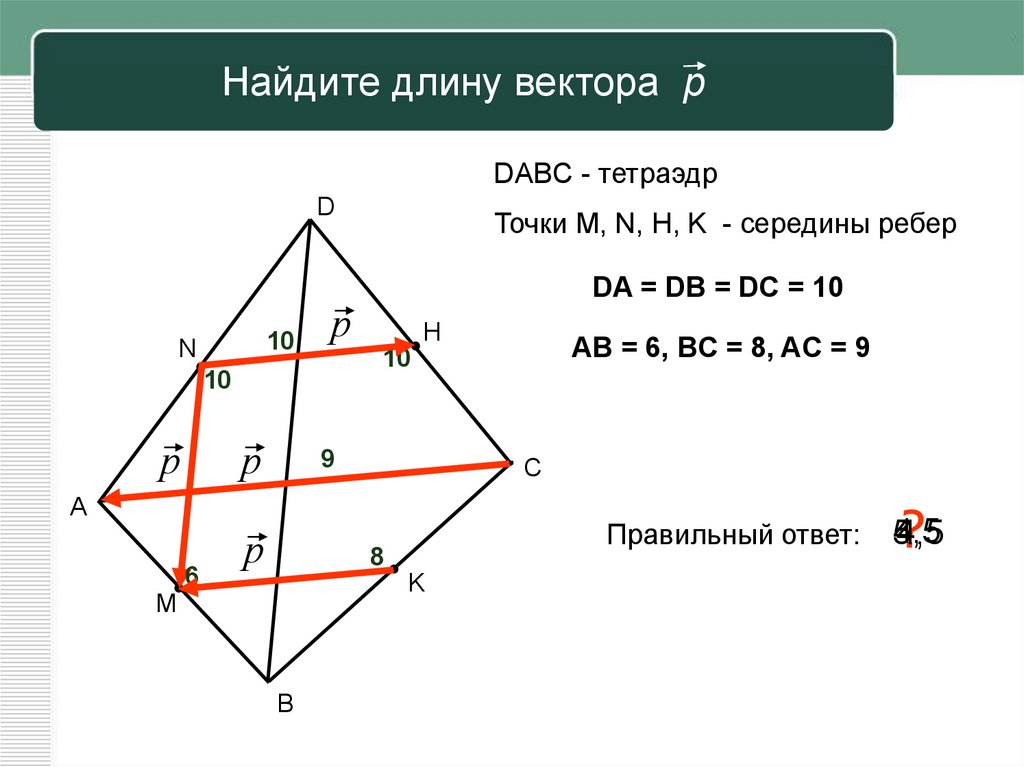 Ортогональность системы функций cos nx, sin nx Ортогональность системы функций cos nx, sin nx§ 414. Формулы Эйлера-Фурье § 415. Ряд Фурье § 416. Ряд Фурье для непрерывной функции § 417. Ряд Фурье для четной и нечетной функции § 418. Ряд Фурье для разрывной функции ДИФФЕРЕНЦИРОВАНИЕ И ИНТЕГРИРОВАНИЕ ФУНКЦИЙ НЕСКОЛЬКИХ АРГУМЕНТОВ § 420. Функция трех и большего числа аргументов § 421. Способы задания функций нескольких аргументов § 422. Предел функции нескольких аргументов § 424. Непрерывность функции нескольких аргументов § 425. Частные производные § 426. Геометрический смысл частных производных для случая двух аргументов § 427. Полное и частное приращения § 428. Частный дифференциал § 429. О выражении частной производной через дифференциал § 430. Полный дифференциал § 431. Геометрический смысл полного дифференциала (случай двух аргументов) § 432. Инвариантность выражения … полного дифференциала § 433. Техника дифференцирования § 434. Дифференцируемые функции § 435.  Касательная плоскость и нормаль к поверхности Касательная плоскость и нормаль к поверхности§ 436. Уравнение касательной плоскости § 437. Уравнения нормали § 438. Дифференцирование сложной функции § 439. Замена прямоугольных координат полярными § 440. Формулы для производных сложной функции § 441. Полная производная § 442. Дифференцирование неявной функции нескольких переменных § 443. Частные производные высших порядков § 444. Полные дифференциалы высших порядков § 445. Техника повторного дифференцирования § 446. Условное обозначение дифференциалов § 447. Формула Тейлора для функции нескольких аргументов § 448. Экстремум (максимум и минимум) функции нескольких аргументов § 449. Правило нахождения экстремума § 450. Достаточные условия экстремума (случай двух аргументов) § 451. Двойной интеграл § 452. Геометрический смысл двойного интеграла § 453. Свойства двойного интеграла § 454. Оценка двойного интеграла § 455. Вычисление двойного интеграла (простейший случай) § 456.  Вычисление двойного интеграла (общий случай) Вычисление двойного интеграла (общий случай)§ 457. Функция точки § 458. Выражение двойного интеграла через полярные координаты § 459. Площадь куска поверхности § 460. Тройной интеграл § 461. Вычисление тройного интеграла (простейший случай) § 462. Вычисление тройного интеграла (общий случай) § 463. Цилиндрические координаты § 464. Выражение тройного интеграла через цилиндрические координаты § 465. Сферические координаты § 466. Выражение тройного интеграла через сферические координаты § 467. Схема применения двойного и тройного интегралов § 468. Момент инерции § 471. Криволинейный интеграл § 472. Механический смысл криволинейного интеграла § 473. Вычисление криволинейного интеграла § 474. Формула Грина § 475. Условие, при котором криволинейный интеграл не зависит от пути § 476. Другая форма условия предыдущего параграфа ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ § 478. Уравнение первого порядка § 479. Геометрический смысл уравнения первого порядка § 480. 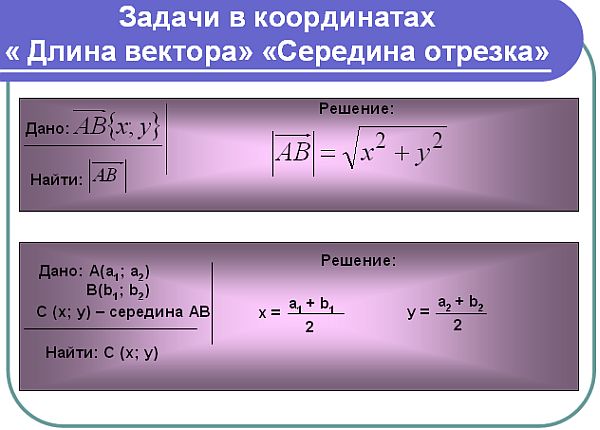 Изоклины Изоклины§ 481. Частное и общее решения уравнения первого порядка § 482. Уравнения с разделенными переменными § 483. Разделение переменных. Особое решение § 484. Уравнение в полных дифференциалах § 484а. Интегрирующий множитель § 485. Однородное уравнение § 486. Линейное уравнение первого порядка § 487. Уравнение Клеро § 488. Огибающая § 489. Об интегрируемости дифференциальных уравнений § 490. Приближенное интегрирование уравнений первого порядка по методу Эйлера § 491. Интегрирование дифференциальных уравнений с помощью рядов § 492. О составлении дифференциальных уравнений § 493. Уравнение второго порядка § 494. Уравнение n-го порядка § 495. Случаи понижения порядка § 496. Линейное уравнение второго порядка § 497. Линейное уравнение второго порядка с постоянными коэффициентами § 498. Линейное уравнение второго порядка с постоянными коэффициентами без правой части § 498а. Связь между случаями 1 и 3 § 498 § 499.  Линейное уравнение второго порядка с постоянными коэффициентами с правой частью Линейное уравнение второго порядка с постоянными коэффициентами с правой частью§ 500. Линейные уравнения любого порядка § 501. Метод вариации постоянных § 502. Системы дифференциальных уравнений. Линейные системы НЕКОТОРЫЕ ЗАМЕЧАТЕЛЬНЫЕ КРИВЫЕ § 503. Строфоида § 504. Циссоида Диокла § 505. Декартов лист § 506. Верзьера Аньези § 507. Конхоида Никомеда § 508. Улитка Паскаля; кардиоида § 509. Линия Кассини § 510. Лемниската Бернулли § 511. Архимедова спираль § 512. Эвольвента (развертка) круга § 513. Логарифмическая спираль § 514. Циклоиды § 515. Эпициклоиды и гипоциклоиды § 516. Трактриса § 517. Цепная линия |
|
Навигация: Главная Случайная страница Обратная связь ТОП Интересно знать Избранные Топ: Комплексной системы оценки состояния охраны труда на производственном объекте (КСОТ-П): Цели и задачи Комплексной системы оценки состояния охраны труда и определению факторов рисков по охране труда. Эволюция кровеносной системы позвоночных животных: Биологическая эволюция – необратимый процесс исторического развития живой природы… Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья… Интересное: Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы… Национальное богатство страны и его составляющие: для оценки элементов национального богатства используются… Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным… Дисциплины: Автоматизация Антропология Археология Архитектура Аудит Биология Бухгалтерия Военная наука Генетика География Геология Демография Журналистика Зоология Иностранные языки Информатика Искусство История Кинематография Компьютеризация Кораблестроение Кулинария Культура Лексикология Лингвистика Литература Логика Маркетинг Математика Машиностроение Медицина Менеджмент Металлургия Метрология Механика Музыкология Науковедение Образование Охрана Труда Педагогика Политология Правоотношение Предпринимательство Приборостроение Программирование Производство Промышленность Психология Радиосвязь Религия Риторика Социология Спорт Стандартизация Статистика Строительство Теология Технологии Торговля Транспорт Фармакология Физика Физиология Философия Финансы Химия Хозяйство Черчение Экология Экономика Электроника Энергетика Юриспруденция |
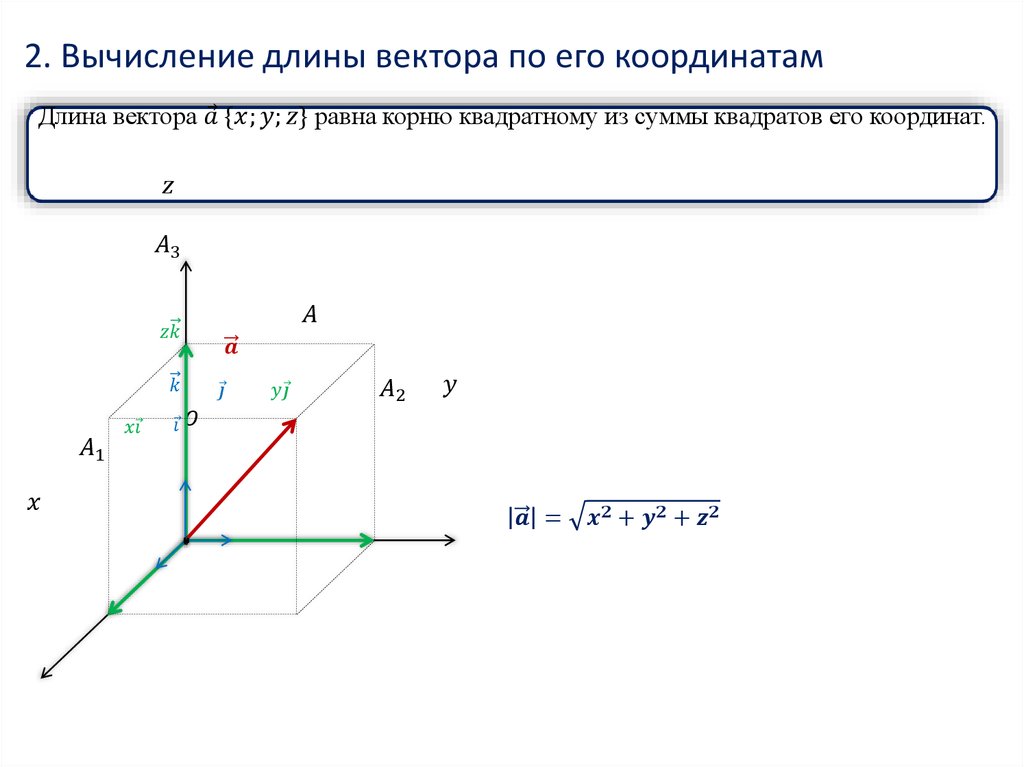
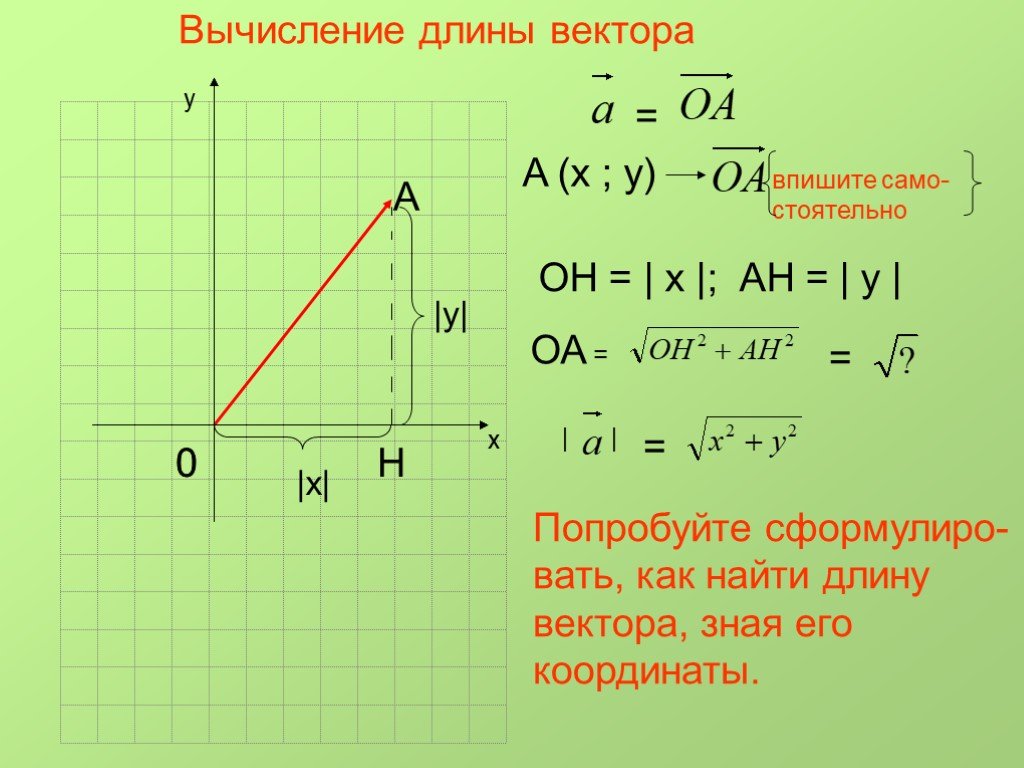
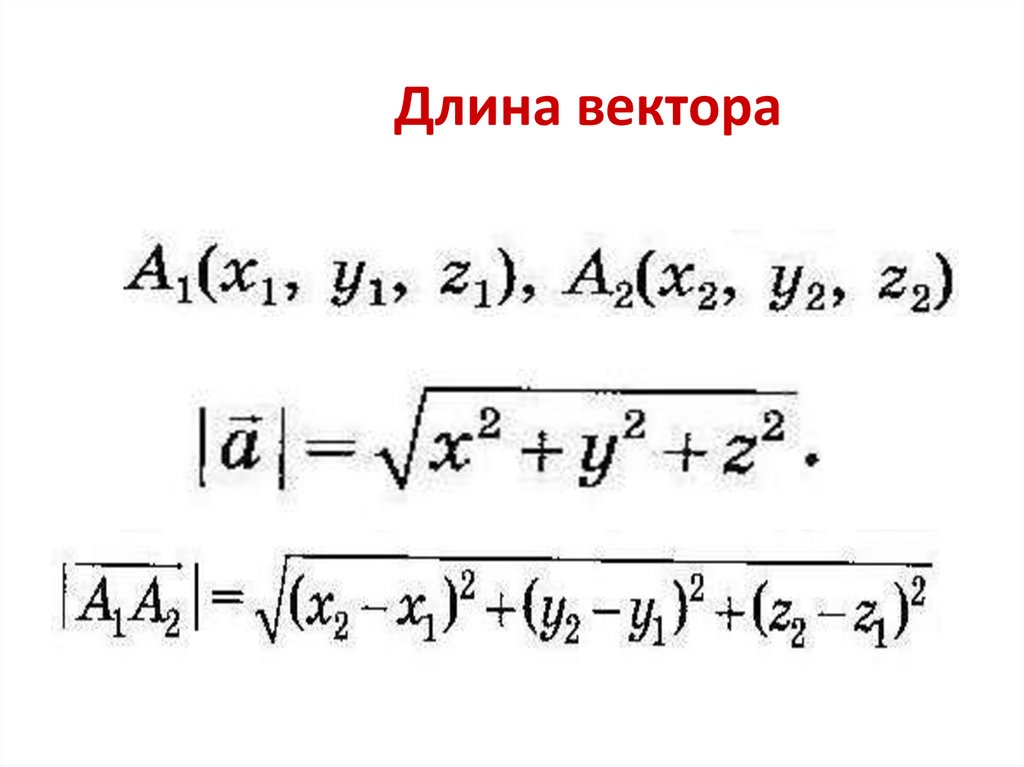
⇐ ПредыдущаяСтр 2 из 5Следующая ⇒ Большинство задач на нахождение длины вектора решаются в координатах. Пусть известны длины двух векторов , и угол между ними (или косинус угла), а требуется найти длину вектора или . В этом случае можно по теореме косинусов в треугольнике АВС вычислить длину стороны ВС, которая равна искомой длине вектора. Разберем решение примера для пояснения сказанного. Пример. Длины векторов и равны 3 и 7 соответственно, а угол между ними равен . Вычислите длину вектора . Решение. Длина вектора равна длине стороны ВС в треугольнике АВС. Из условия нам известны длины сторон АВ и АС этого треугольника (они равны длинам соответствующих векторов), а также угол между ними, поэтому нам достаточно данных для применения теоремы косинусов: Таким образом, . Ответ: . Итак, для нахождения длины вектора по координатам используем формулы 16. Линейно зависимые и линейно независимые системы векторов. Рассмотрим набор из p n-мерных векторов, обозначим их следующим образом . Составим линейную комбинацию этих векторов и произвольных чисел (действительных или комплексных): . Отталкиваясь от определения операций над n-мерными векторами, а так же свойств операций сложения векторов и умножения вектора на число, можно утверждать, что записанная линейная комбинация представляет собой некоторый n-мерный вектор , то есть, . Так мы подошли к определению линейной зависимости системы векторов . Определение. Если линейная комбинация может представлять собой нулевой вектор тогда, когда среди чисел есть хотя бы одно, отличное от нуля, то система векторов называется линейно зависимой. Определение. Если линейная комбинация представляет собой нулевой вектор только тогда, когда все числа равны нулю, то система векторов называется линейно независимой.
17. Базис пространства R3. Разложение вектора по произвольному базису. Базис векторного пространства – это упорядоченная совокупность линейно независимых векторов этого пространства, число которых равно размерности пространства. Приведем некоторые рассуждения, основываясь на этих определениях. Рассмотрим пространство n-мерных векторов. Покажем, что размерность этого пространства равна n. Возьмем систему из n единичных векторов вида Из последнего утверждения и определения базиса можно сделать вывод, что любая системаn-мерных векторов, число векторов в которой меньше n, не является базисом. Теперь переставим местами первый и второй вектор системы . Легко показать, что полученная система векторов также является базисом n-мерного векторного пространства. Составим матрицу, приняв ее строками векторы этой системы. Эта матрица может быть получена из единичной матрицы перестановкой местами первой и второй строк, следовательно, ее ранг будет равен n. Таким образом, система из n векторов линейно независима и является базисом n-мерного векторного пространства. Если переставить местами другие векторы системы , то получим еще один базис. Если взять линейно независимую систему не единичных векторов, то она также является базисом n-мерного векторного пространства. Таким образом, векторное пространство размерности n имеет столько базисов, сколько существует линейно независимых систем из n n-мерных векторов. Если говорить о двумерном векторном пространстве (то есть, о плоскости), то ее базисом являются два любых не коллинеарных вектора. Базисом трехмерного пространства являются три любых некомпланарных вектора. Рассмотрим несколько примеров. Пример. Являются ли векторы базисом трехмерного векторного пространства? Решение. Исследуем эту систему векторов на линейную зависимость. Для этого составим матрицу, строками которой будут координаты векторов, и найдем ее ранг: Ответ: да, являются. Пример. Может ли система векторов быть базисом векторного пространства? Решение. Эта система векторов линейно зависима, так как максимальное число линейно независимых трехмерных векторов равно трем. Следовательно, эта система векторов не может быть базисом трехмерного векторного пространства (хотя подсистема исходной системы векторов является базисом). Ответ: нет, не может. Пример. Убедитесь, что векторы Решение. Составим матрицу, приняв ее строками исходные векторы: Ответ: исходные векторы действительно являются базисом четырехмерного пространства.
Папиллярные узоры пальцев рук — маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни… Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим. Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ — конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой… Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства… |
 ..
.. Однако, когда координаты вектора не известны приходится искать другие пути решения.
Однако, когда координаты вектора не известны приходится искать другие пути решения.
 ..
..Длина дуги и единичный вектор касательной
\(\renewcommand{\chaptername}{Unit}
\newcommand{\derivativehomeworklink}[1]{\href{http://db.tt/cSeKG8XO}{#1}}
\newcommand{\chpname}{устройство}
\newcommand{\sageurlforcurvature}{http://bmw.byuimath.com/dokuwiki/doku.php?id=curvature_calculator}
\newcommand{\uday}{\LARGE Day \theunitday \normalsize \flushleft \stepcounter{unitday} }
\newcommand{\sageworkurl}{http://bmw.byimath.com/dokuwiki/doku.php?id=work_calculator}
\newcommand{\sagefluxurl}{http://bmw.byuimath.com/dokuwiki/doku.php?id=flux_calculator}
\newcommand{\sageworkfluxurl}{http://bmw.byuimath.com/dokuwiki/doku.php?id=both_flux_and_work}
\newcommand{\sagelineintegral}{http://bmw.byuimath.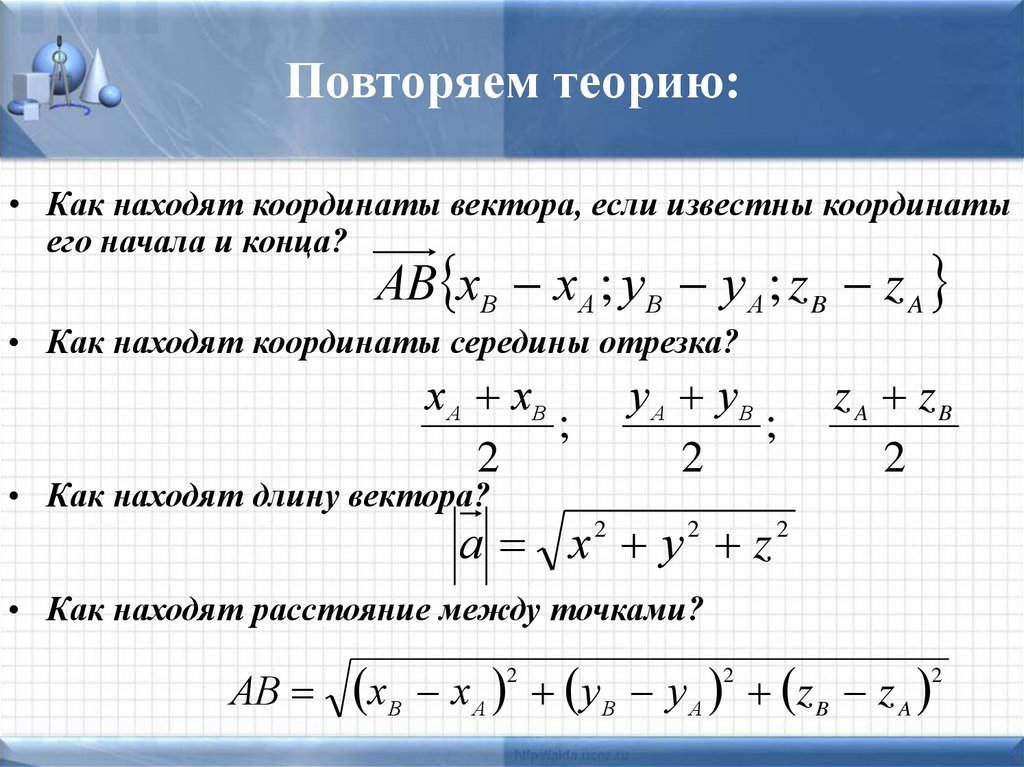 {\,\prime}}
\новая команда{\lt}{<}
\новая команда{\gt}{>}
\newcommand{\amp}{&}
\)
{\,\prime}}
\новая команда{\lt}{<}
\новая команда{\gt}{>}
\newcommand{\amp}{&}
\)
Цели
Этот раздел будет…
В предыдущем разделе был разработан способ прогнозирования положения и скорости по ускорению, давайте более подробно рассмотрим фактический путь, пройденный снарядом. Нам нужно уметь вычислять фактическое расстояние, которое проходит объект (не смещение, а расстояние). Это требует, чтобы мы изучили длину дуги. Это было рассмотрено для кривых на плоскости в главах 3 и 4. (См. 4.1.9.c)
Обзор 8.2.1
Лошадь пробегает один раз по эллиптической дорожке, которая параметризуется выражением \(\vec r(t) = (3\cos t,4\sin t)\text{.}\) Поставьте, не решая, интеграл формула, показывающая расстояние, пройденное лошадью. Какое водоизмещение? 92t}\right)dt\text{.}\) Поскольку начальное и конечное положение лошади равны, перемещение равно нулю. Длина дуги не равна смещению.
Давайте теперь разработаем формулу для длины дуги пространственной кривой, кривой в 3D.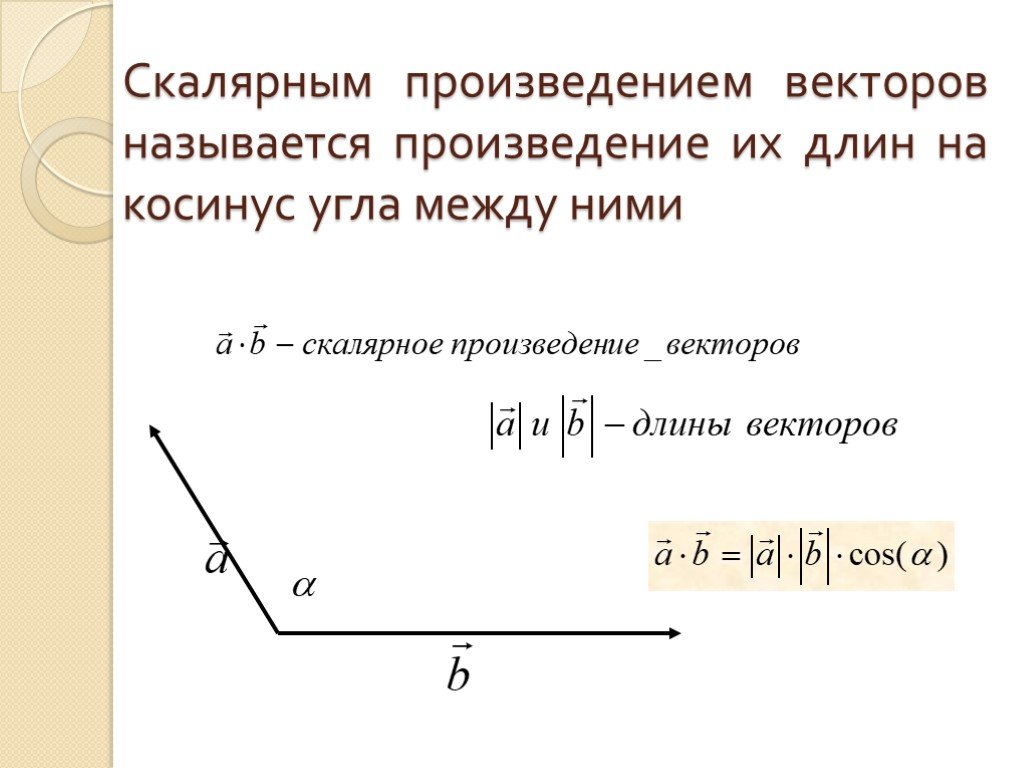 Мы всегда можем параметризовать пространственную кривую с помощью \(\vec r(t) = (x,y,z)\) (один вход, 3 выхода).
Мы всегда можем параметризовать пространственную кривую с помощью \(\vec r(t) = (x,y,z)\) (один вход, 3 выхода).
Помните: Когда мы говорим о скорости и скорости, важно понимать их различия. Скорость имеет направление и (часто компоненты), в то время как скорость — это общее движение или величина скорости.
Упражнение 8.2.2
Космический корабль путешествует по галактике. Пусть \(\vec r(t) = (x,y,z)\) будет положением космического корабля в момент времени \(t\text{,}\) с Землей в начале координат \((0,0 ,0)\text{.}\)
Посмотреть видео на YouTube.
Технически мы должны написать \(\vec r(t) = (x(t),y(t),z(t))\text{.}\) Однако мы уже знаем, что \(x\text{ ,}\) \(y\text{,}\) и \(z\) зависят от \(t\text{,}\), поэтому мы просто оставим зависимость от \(t\) выключенной.
(а)
Каковы скорость и скорость космического корабля в момент времени \(t\text{?}\) Ваши ответы должны включать некоторые производные (например, \(\frac{dx}{dt}\)).
(б)
Если космический корабль движется очень малое время \(dt\text{,}\), то его скорость почти постоянна. Поскольку расстояние равно скорости, умноженной на время, то какое расстояние (назовем его \(ds\)) преодолеет космический корабль за этот короткий промежуток времени?
(в)
Пока корабль движется из времени \(t=a\) во время \(t=b\text{,}\), объясните, почему пройденное расстояние (длина дуги пройденного пути) равно 92}\ дт . \end{уравнение*}
Подраздел 8.2.1 Создание «хороших» пространственных кривых
Во всей нашей последующей работе мы будем рассматривать пространственные кривые, у которых есть хорошие гладкие траектории. Что это значит? Мы хотим иметь возможность вычислять касательные векторы в любой точке, поэтому нам потребуется, чтобы параметризация \(\vec r\) была дифференцируемой. Однако этого недостаточно.
Упражнение 8.2.3
Мы встречали полярную кривую \(r = 1-\sin\theta\) раньше (мы назвали ее кардиоидой, и она выглядела как сердце).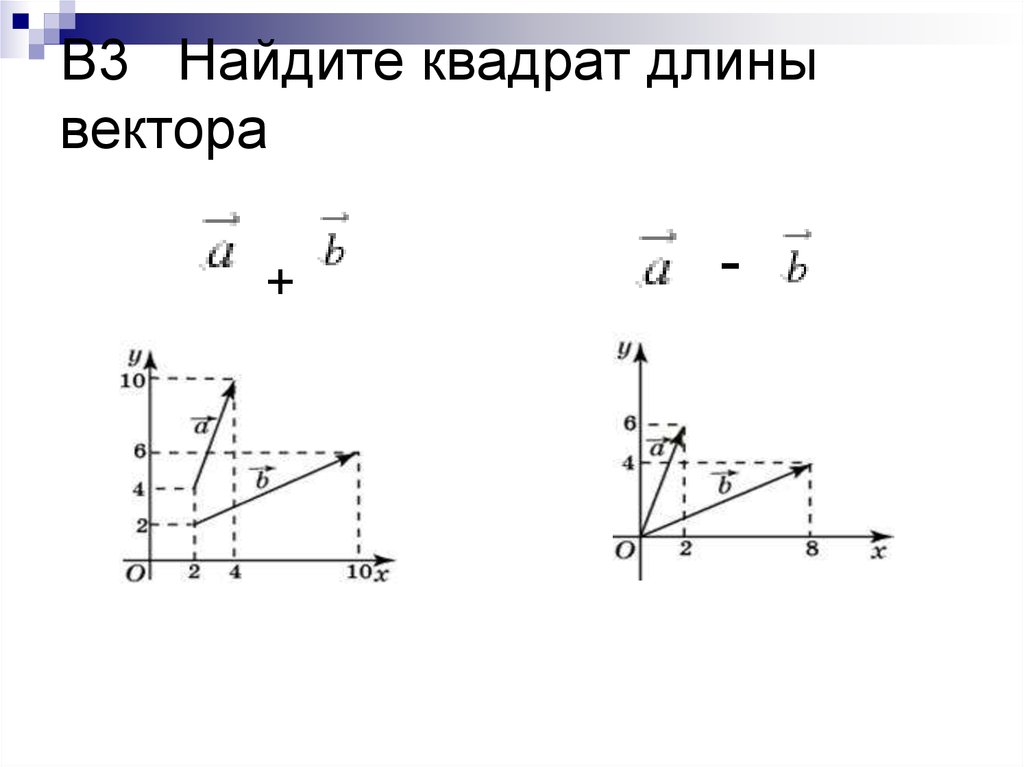 Напомним, что мы можем переключиться с полярной системы на декартову, используя преобразование координат \(x=r\cos\theta\) и \(y=r\sin\theta\text{.}\)
Напомним, что мы можем переключиться с полярной системы на декартову, используя преобразование координат \(x=r\cos\theta\) и \(y=r\sin\theta\text{.}\)
(а)
Нарисуйте кривую.
(б)
Дайте параметризацию этой кривой: \(\vec r(\theta) = ((1-\sin\theta)\cos\theta, ?)\text{.}\)
Параметризация полностью дифференцируема.
(в)
Найти \(\dfrac{d\vec r}{d\theta}\text{.}\)
(d)
Вы должны заметить острый пик на графике. В какой точке \(\theta\) находится этот выступ? Каково значение производной \(\dfrac{d\vec r}{d\theta}\) при этом значении \(\theta\text{.}\)
Мы хотели бы избежать траекторий, содержащих касп, потому что в каспе направление движения меняется довольно резко. Это может произойти физически, но для этого требуется, чтобы скорость объекта достигла нуля, объект перестает двигаться, а затем траектория меняет направление. Тот факт, что скорость достигает нуля, будет означать, что мы не можем делить на нее в нашей последующей работе.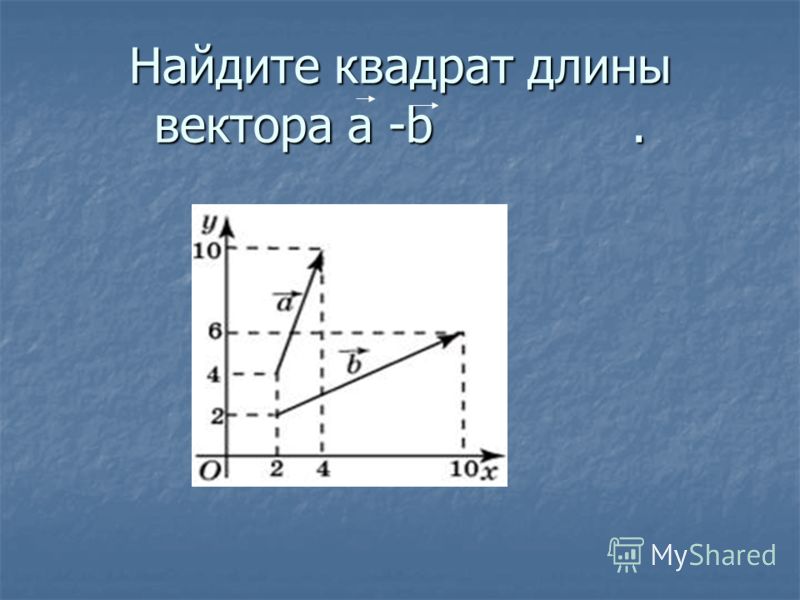 Чтобы избежать этого, мы делаем определение, которое требует, чтобы путь был дифференцируемым, а скорость никогда не равнялась нулю.
Чтобы избежать этого, мы делаем определение, которое требует, чтобы путь был дифференцируемым, а скорость никогда не равнялась нулю.
Определение8.2.1Гладкие кривые
Пусть \(\vec r(t)=(x,y,z)\) — параметризация пространственной кривой \(C\text{.}\). Мы говорим, что \(\vec r\) является гладким, если \(\vec r\) дифференцируема, и производная никогда не бывает нулевым вектором. Если \(\vec r\) — гладкая параметризация, то мы называем \(С\) гладкой кривой.
Подраздел 8.2.2 Разработка единичного касательного вектора
Упражнение 8.2.4
Рассмотрим спиральную пространственную кривую \(C\) с параметризацией \(\vec r(t)=(\cos t, \sin t, t)\text{.}\)
Просмотрите ДВА видео на YouTube (Длина дуги Параметр и единичный касательный вектор).
(а)
Является ли C гладкой кривой?
(б)
Найдите длину этой пространственной кривой для \(t\in[0,2\pi]\), используя формулу из задачи 8.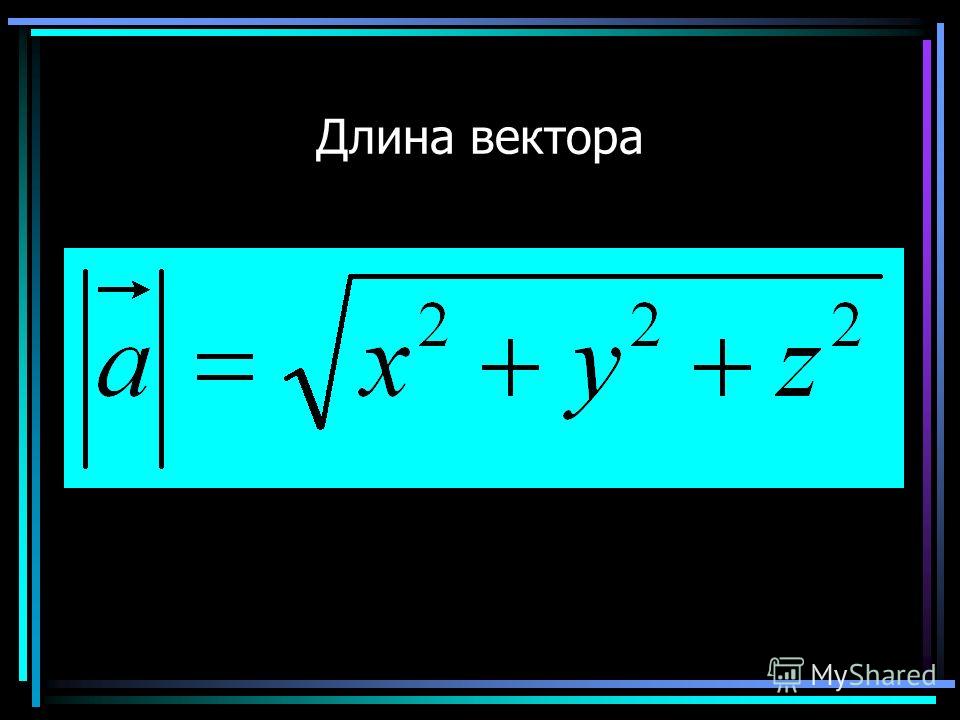 2.2.c. Вычислите любые интегралы.
2.2.c. Вычислите любые интегралы.
(в)
Теперь найдите длину пространственной кривой от \(t=0\) до времени \(t=t\text{.}\)
(d)
Задайте вектор, касательный кривой в точке \(t=2\pi\text{.}\)
(e)
Теперь задайте вектор длины 1, который касается кривой в точке \(t=2\pi\text{.}\)
В предыдущем упражнении вы разработали две большие идеи. Вы показали, как получить единичный касательный вектор к кривой. Вы также разработали формулу для длины кривой от момента времени \(t=0\) до любого момента времени \(t=t\text{.}\). Это дает нам функцию \(s(t)\), которая сообщает сколько мы прошли за \(t\) секунд. Теперь мы можем предсказать пройденное расстояние по времени. Предсказывать будущее — это мощно. Прежде чем двигаться дальше, давайте рассмотрим производную от \(s(t)\text{,}\), потому что это уже известная нам величина. 9t \left|\frac {d\vec r}{d\tau} \right|\ d\tau\text{.}\)
Вы можете запомнить \(\ds\frac{ds}{dt} = \ left|\frac {d\vec r}{dt} \right|\) следующим образом.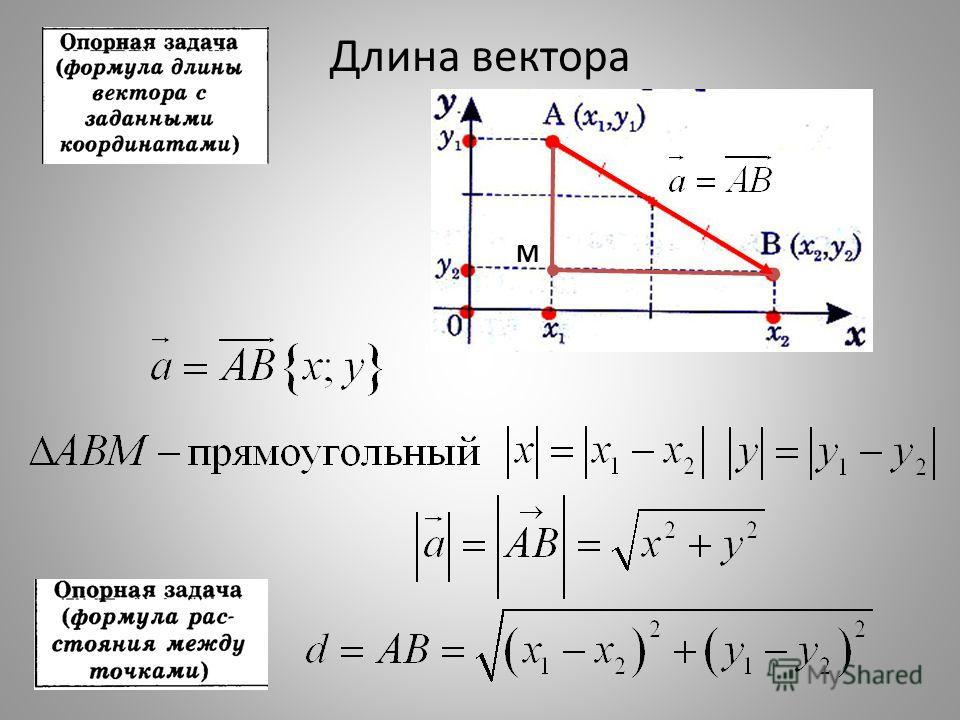 Мы используем дифференциал \(ds\) для представления изменения расстояния, а \(dt\) представляет изменение времени. Таким образом, скорость объекта — это изменение расстояния \(ds\) по сравнению с изменением времени \(dt\text{.}\)
Мы используем дифференциал \(ds\) для представления изменения расстояния, а \(dt\) представляет изменение времени. Таким образом, скорость объекта — это изменение расстояния \(ds\) по сравнению с изменением времени \(dt\text{.}\)
(а)
Объясните, почему \(\ds\frac{ds}{dt} = \left|\frac {d\vec r}{dt} \right|\text{,}\) скорость.
(б)
9t \left|\frac {d\vec r}{d\tau}\right|\ d\tau\) параметр длины дуги. Он говорит нам, какое расстояние мы прошли за \(t\) секунд. Теперь мы можем предсказать пройденное расстояние по прошедшему времени. Поскольку \(s(t)\) является возрастающей функцией, мы также можем обратить этот процесс и указать время, прошедшее с пройденного расстояния. Это означает, что мы можем вычислять производные по \(s\) вместо \(t\text{.}\). Когда мы берем производную по \(s\text{,}\), мы спрашиваем, насколько кривая изменится, если мы увеличим длину на 1 единицу вместо того, чтобы увеличить время на 1 единицу. Мы напишем \begin{уравнение*} \ds\frac{d\vec r}{ds} =\ds\frac{d\vec r/dt}{ds/dt} = \frac{d\vec r/dt}{|d\vec r/dt |} = \frac{\vec v}{|\vec{v}|}.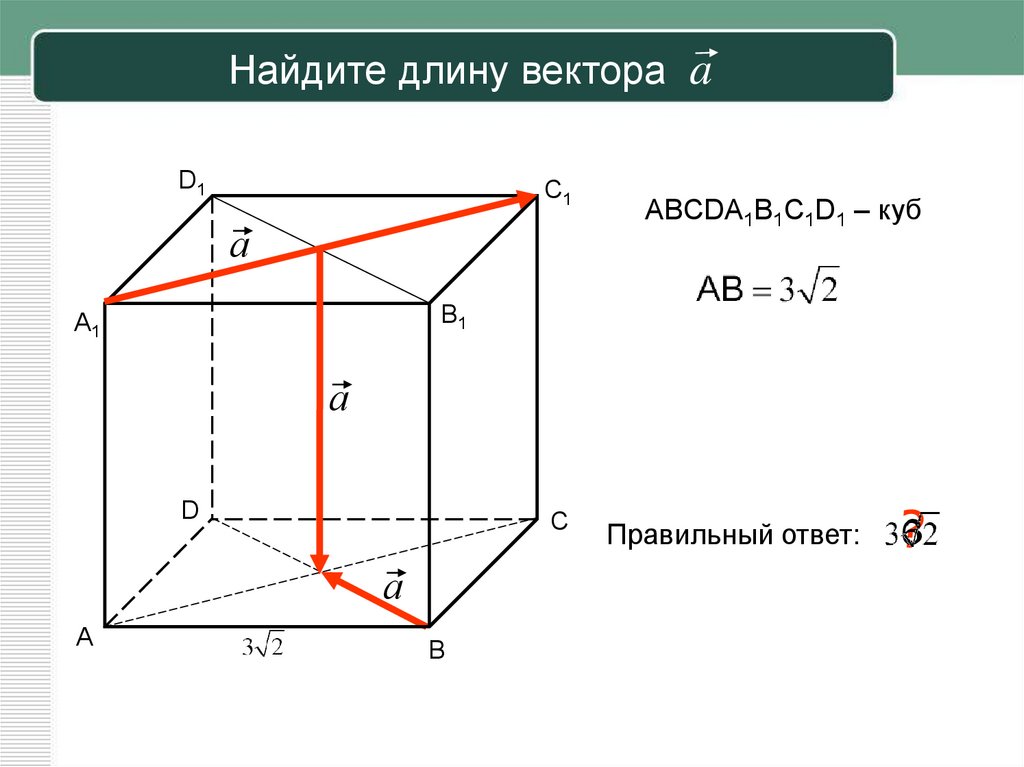 \end{уравнение*}
\end{уравнение*}Подраздел 8.2.3 Определение единичного касательного вектора
Упражнение 8.2.7
Рассмотрим снова винтовую пространственную кривую \(\vec r(t)=(\cos t, \sin t, t)\text{.}\) Мы показали, что \(s(t) = t\sqrt{ 2}\) в упражнении 4.
(а)
Решите для \(t\) через \(s\) (найдите обратное значение \(s(t)\)).
(б)
Используйте свой ответ, чтобы определить, сколько времени прошло, если вы преодолели 4 единицы расстояния.
(в)
Вычислить \(D\vec r(t)\) и \(Dt(s)\text{.}\) У вас должна быть матрица 3 на 1 и матрица 1 на 1.
(г)
Используйте цепное правило для вычисления производной \(\vec r(t(s))\text{.}\)
(e)
Вычислить длину \(\left|\ds\frac{d\vec r}{ds}\right|\text{.}\)
Предыдущее упражнение мотивирует следующее определение.
Определение8.2.2Единичный касательный вектор
Пусть \(\vec r(t)\) — параметризация гладкой пространственной кривой.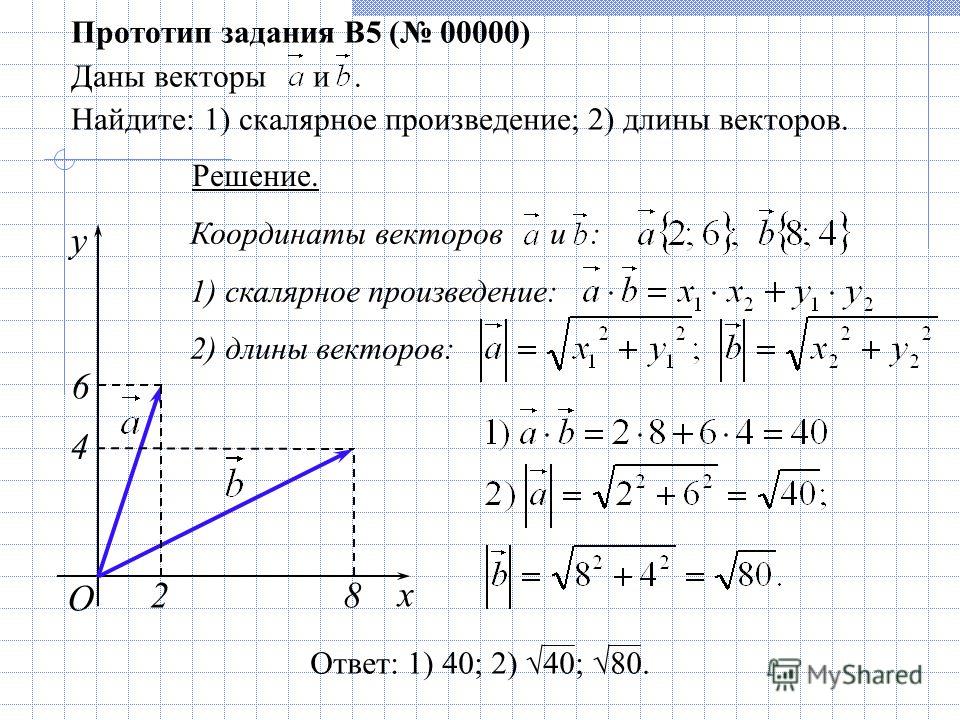 Мы определяем единичный касательный вектор \(\vec T(t)\) как производную от \(\vec r\) по длине дуги, что означает
Мы определяем единичный касательный вектор \(\vec T(t)\) как производную от \(\vec r\) по длине дуги, что означает
Это то же самое, что единичный вектор в том же направлении, что и скорость.
По мере прохождения этого модуля одной из наших ключевых целей является изучение новых обозначений. У нас есть положение \(\vec r\text{,}\) скорость \(\vec v\text{,}\) скорость \(v\) или \(ds/dt\text{,}\) ускорение \(\vec a\text{,}\) единичный касательный вектор \(\vec T\text{,}\) и производная положения по длине дуги \(d\vec r/ds\text{. }\) Последние два точно такие же, так как \(\vec T = d\vec r/ds\text{.}\) Вы также заметили, что \(ds/dt\) и \(v\) оба скорость? Нам нужно начать осознавать, что одно и то же количество можно развить разными способами.
Упражнение 8.2.8
Предположим, что объект движется по пространственной кривой, заданной выражением \(\vec r(t)=(a\cos t,a\sin t,b t)\text{. }\)
}\)
(а)
Найдите скорость и скорость объекта. Что такое \(ds/dt\text{?}\)
(b)
Вычислить \(\frac{d\vec r}{ds}\text{,}\) производную от \(\vec r\) по длине дуги. Оставьте свой ответ в виде \(t\text{.}\)
Подсказка
Разделите верх и низ на \(dt\), а затем вычислите \(d\vec r/dt\) и \(ds/dt\text{.}\)
(в)
Укажите единичный касательный вектор \(\vec T(t)\text{.}\)
По мере продвижения в этой главе мы будем вычислять больше производных относительно \(s\text{,}\) вместо \(t\text{.}\) Вы заметили в предыдущем упражнении, что для вычисления производной по \(s\text{,}\) вы просто вычисляете обычную производную по \(t\ text{,}\), а затем разделите на скорость. Пожалуйста, выполните следующее обзорное упражнение, чтобы убедиться, что вы поняли, что означает \(\frac{d}{ds}\). 92t+16}=5\text{.}\) Затем мы вычисляем \(\dfrac{d\vec r}{ds}=\dfrac{d\vec r/dt}{ds/dt} = \dfrac{1 {5}(-3\sin t, 3\cos t, 4)\text{,}\), что равно \(\vec T\text{.