
Вопрос 15. Системы линейных алгебраических уравнений.
Система линейных уравнений с переменными имеет вид: , где — произвольные числа, называемые соответственно коэффициентами при переменных и свободными членами уравнений.
Решением системы называется такая совокупность чисел ( , , …, ), при подстановке которых каждое уравнение системы обращается в верное равенство.
Система уравнений называется совместной, если она имеет хотя бы одно решение, и несовместной, если она не имеет решений.
Совместная система уравнений называется определенной, если она имеет единственное решение, и неопределенной, если она имеет более одного решения.
Система линейных уравнений с переменными называется системой линейных однородных уравнений, если все их свободные члены равны нулю. Такая система имеет вид: .
Определение. Система
линейно независимых решений называется фундаментальной,
если
каждое решение системы является линейной
комбинацией решений
.
Теорема. Если ранг матрицы коэффициентов при переменных системы линейных однородных уравнении меньше числа переменных , то всякая фундаментальная система решений состоит из решений.
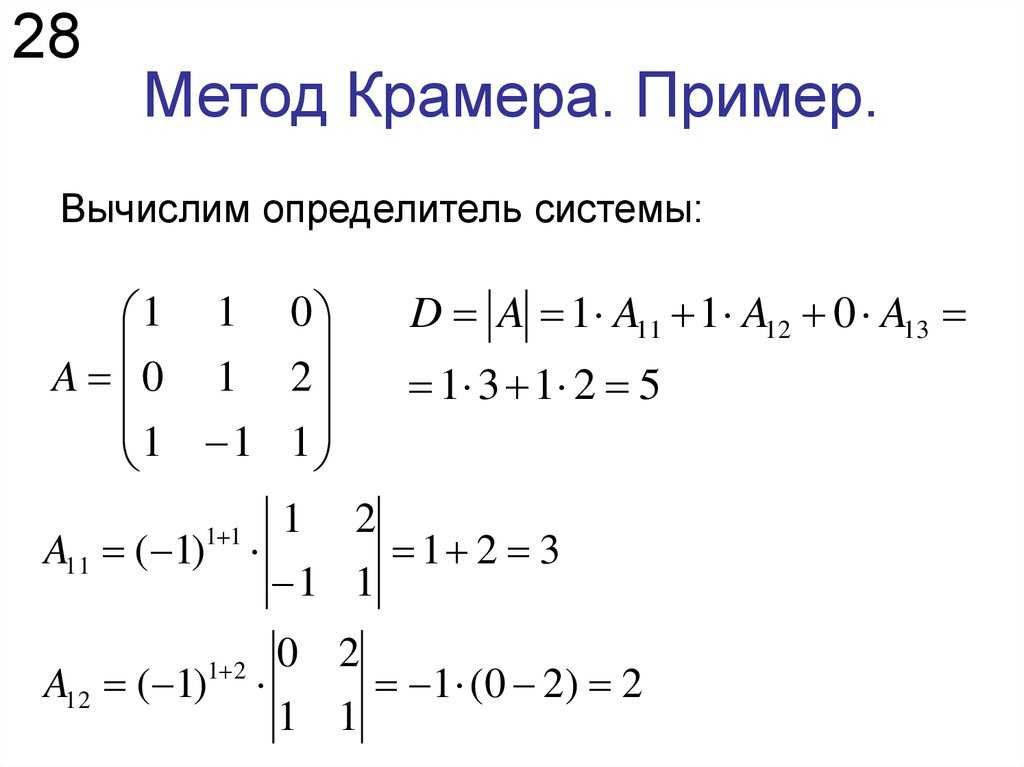
Вопрос 16. Решение систем методом Крамера
Теорема Крамера. Пусть — определитель матрицы системы , а — определитель матрицы, получаемой из матрицы заменой столбца столбцом свободных членов. Тогда, если , то система имеет единственное решение, определяемое по формулам: ( ).
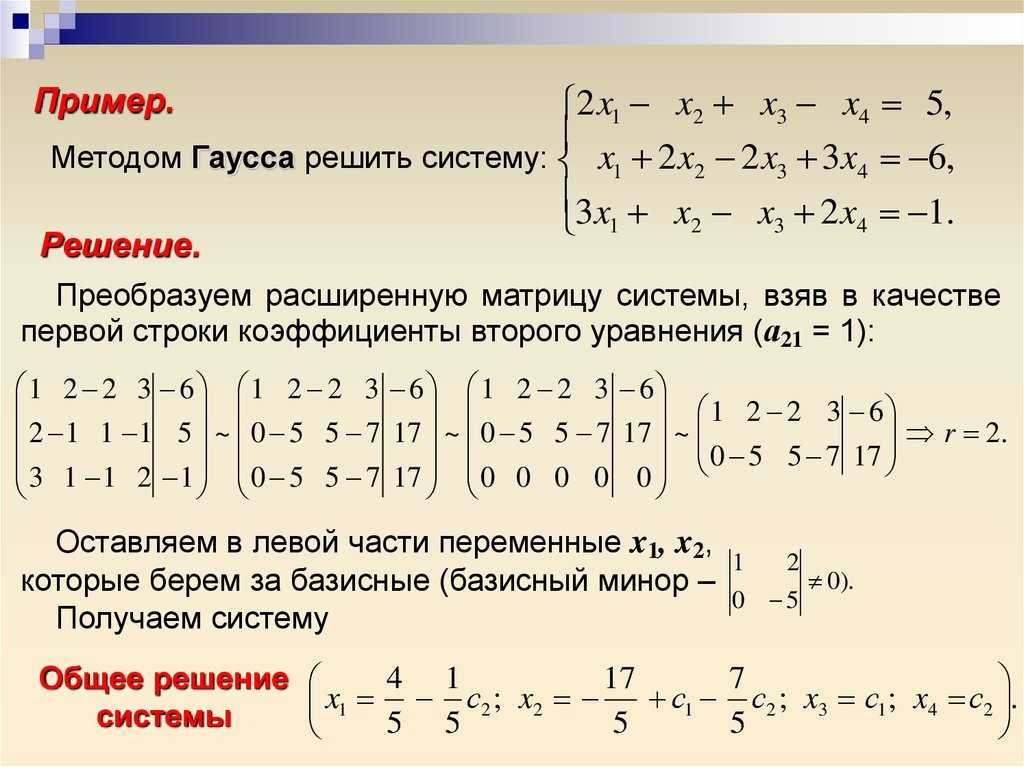
Пример. Решить систему уравнений .
Вычислим определители: , , , .
Итак, , , .
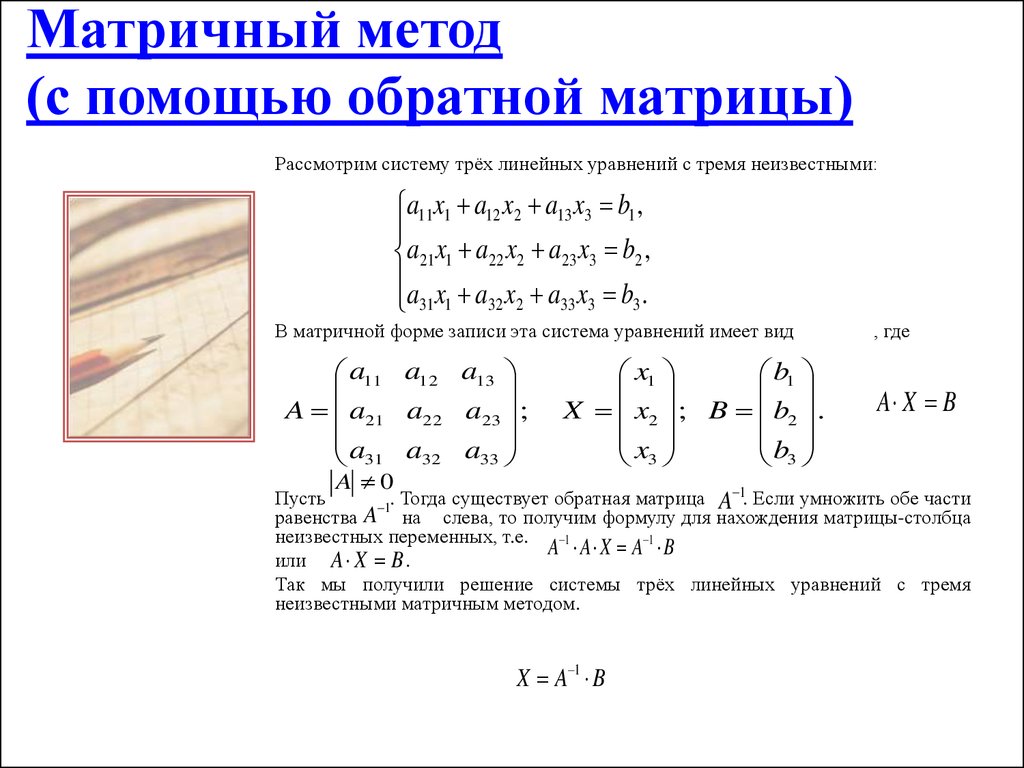
17.Решение систем матричным методом.
Этот
способ или, как его еще называеют, метод
обратной матрицы называется так потому,
что все решение сводится к простому
матричному уравнению, для решения
которого необходимо найти
обратную матрицу.
Для того, что бы расставить все точки
над и, рассмотрим метод под микроскопом.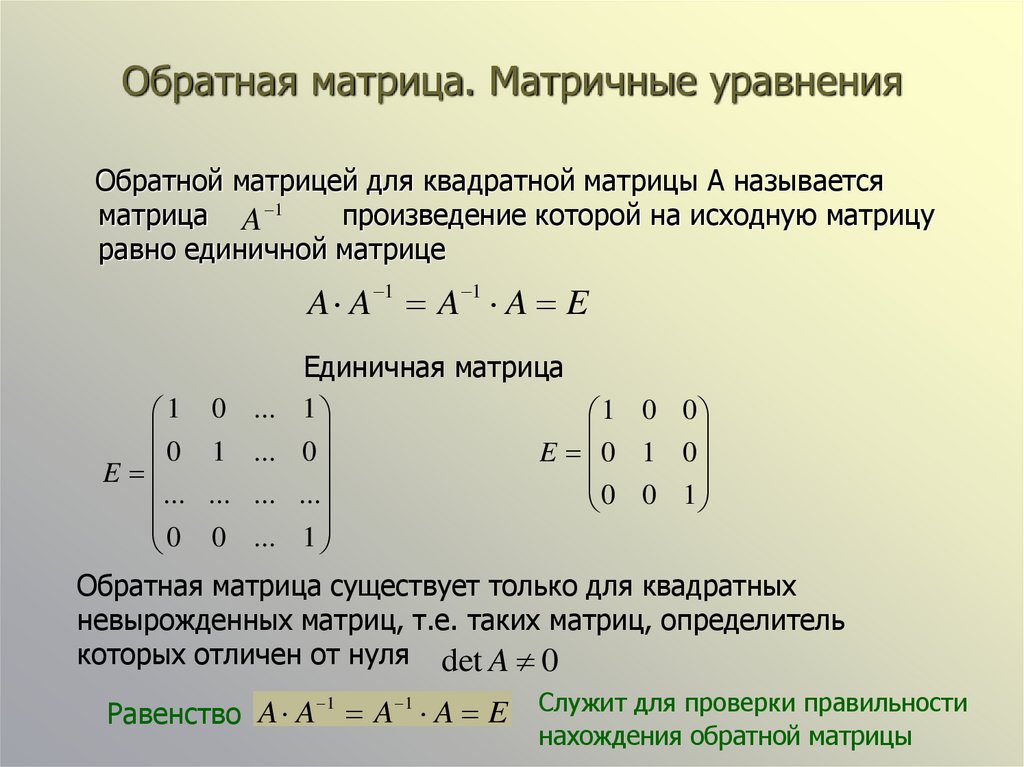
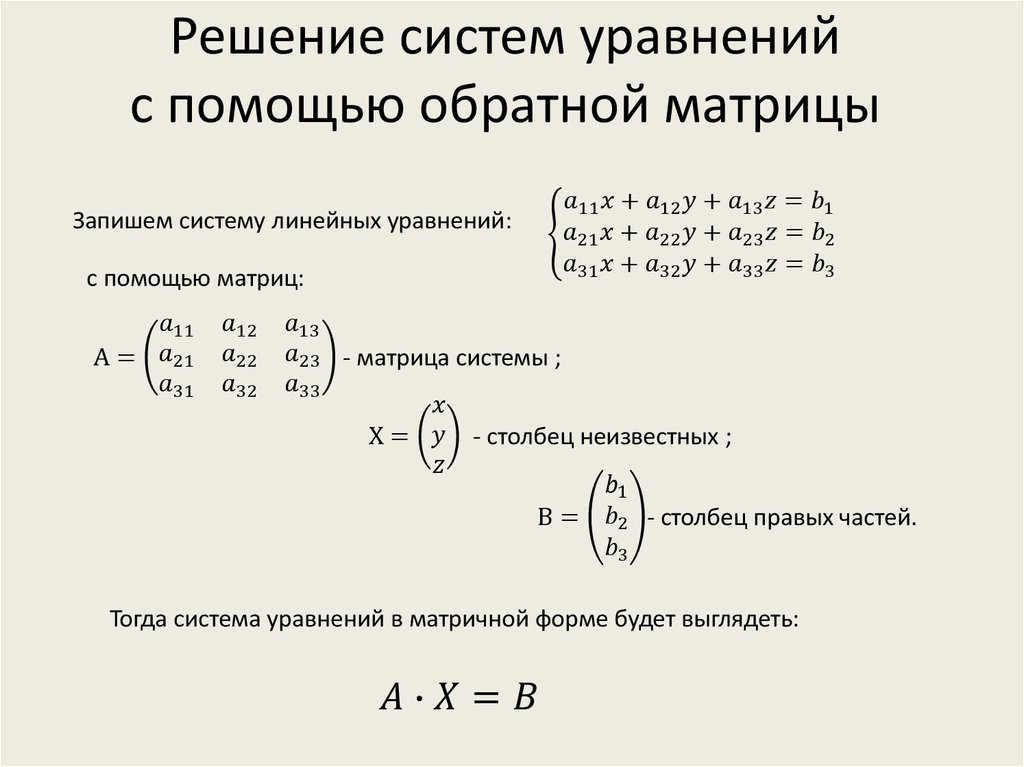
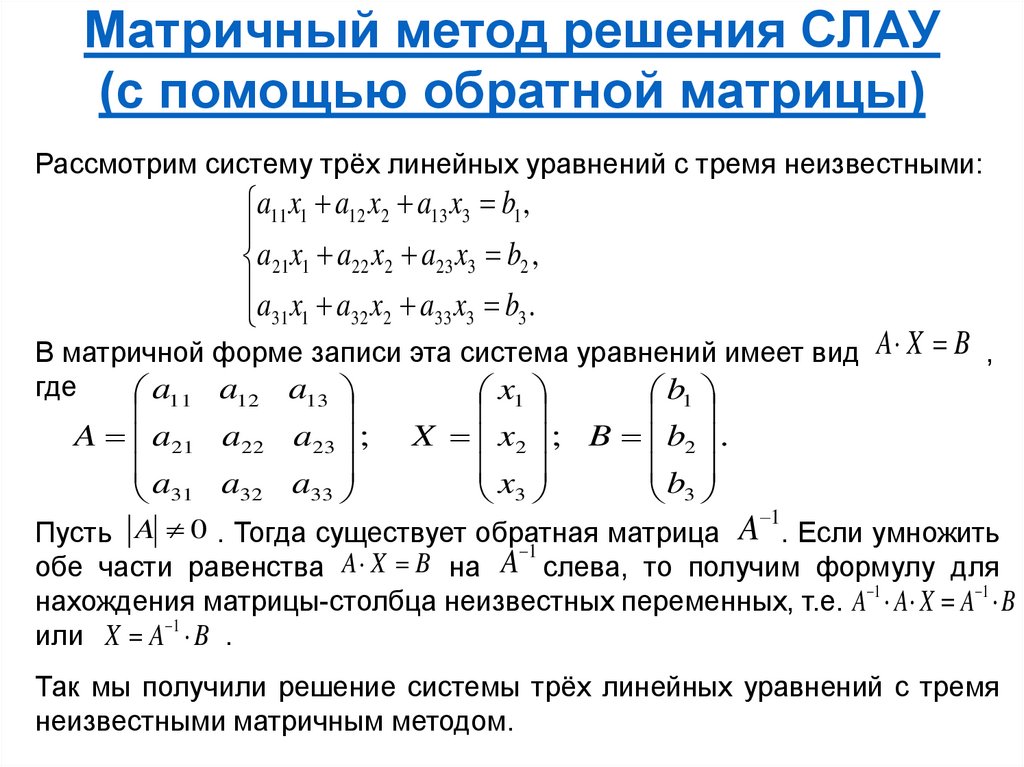
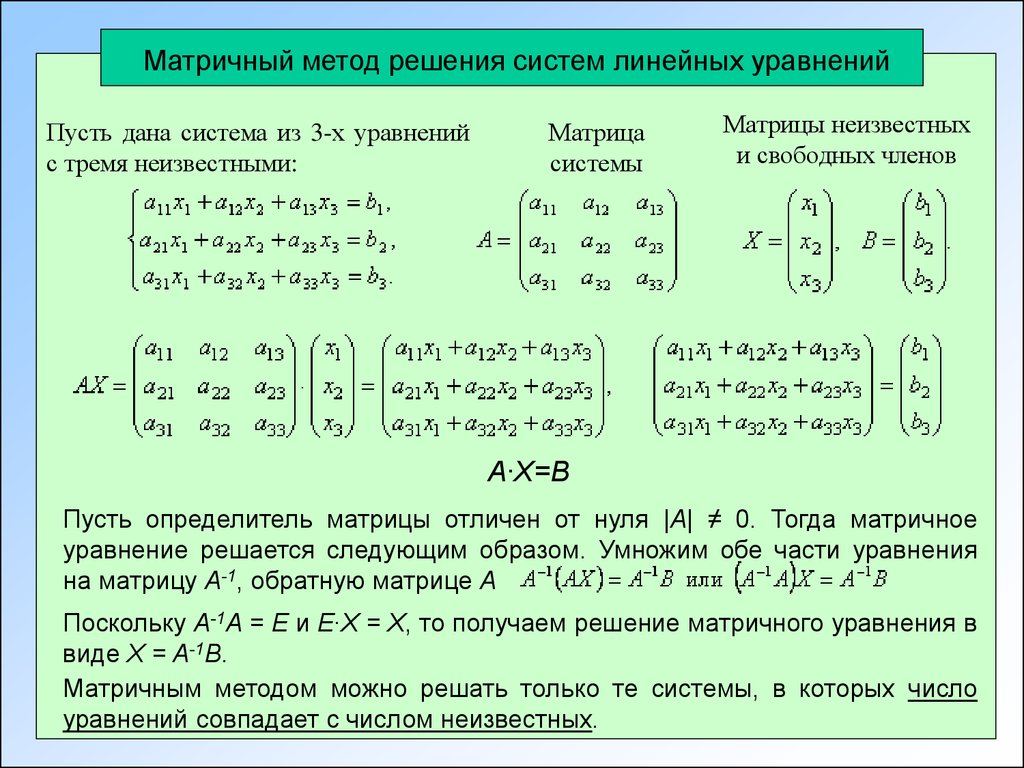
Алгоритм решения достаточно просто. Как и в методах Гаусса и Крамера первоначально надо проверить, имеет ли система уравнений решение по теореме Кронекера-Копелли. Затем для решения матричным методом необходимо ввести в рассмотрение матрицы-столбцы для неизвестных X и свободных членов B. Тогда систему линейных уравнений можно записать в матричной форме AX=B. Умножив это матричное уравнение на A-1, получим A-1AX= A-1B, откуда EX=X=A-1B. Следовательно, матрица-решение X легко находится как произведение A-1 и B.
Для большей ясности решим небольшой пример методом обратной матрицы:
21x1-45x2-3.5x3=10
12x1-16x
14x1+13x2-8x3=10
Определим совместность системы уравнений. По теореме Кронекера-Копелли для того, что бы система линейных алгебраических уравнений была совместна (имела решение), необходимо и достаточно, что быранг основной матрицы
A= |
|
 5
5
и ранг расширенной матрицы
B= |
|
были
равны.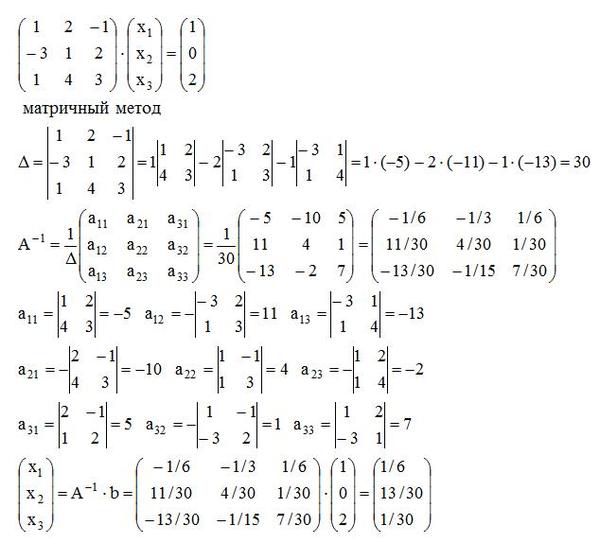 Так как rang|A|=3 равен rang|B|=3 и
равен количеству неизвестных n=3, то
система имеет единственное решение.
Так как rang|A|=3 равен rang|B|=3 и
равен количеству неизвестных n=3, то
система имеет единственное решение.
Для решения методом обратной матрицы необходимо ввести матричные обозначения
A= |
| X= |
| C= |
| , то X=A-1C |
Найдем
обратную матрицу A-1.
A-1= |
|
Для нахождения матрицы X умножим обратную матрицу А-1 на матрицу С
|
| = |
|
 008
008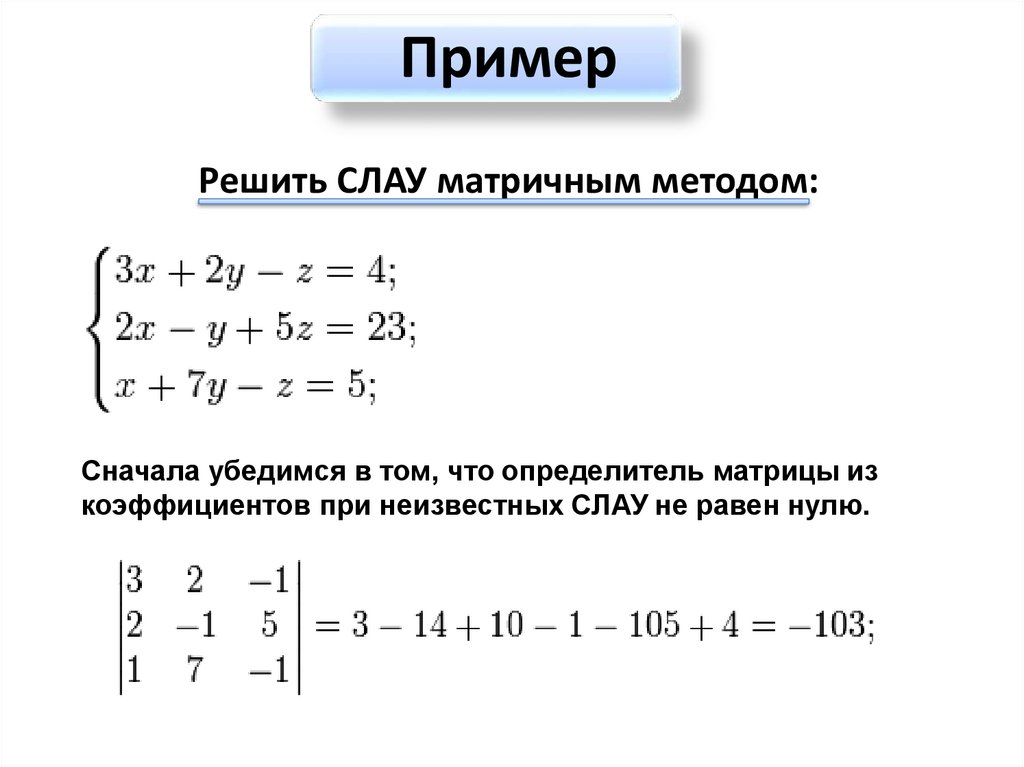 194
194
Получили решение системы уравнений X1=0.227 X2=-0.209 X3=-1.194
Дифференциальное и интегральное исчисления для втузов, т.2
Дифференциальное и интегральное исчисления для втузов, т.2
ОглавлениеПРЕДИСЛОВИЕ К ДЕВЯТОМУ ИЗДАНИЮПРЕДИСЛОВИЕ К ПЯТОМУ ИЗДАНИЮ § 1. Постановка задачи. Уравнение движения тела при сопротивлении среды, пропорциональном скорости. Уравнение цепной линии § 2. Определения § 3. Дифференциальные уравнения первого порядка (общие понятия) § 4. Уравнения с разделенными и разделяющимися переменными. Задача о распаде радия § 5. Однородные уравнения первого порядка § 6. Уравнения, приводящиеся к однородным § 7. Линейные уравнения первого порядка § 8. Уравнение Бернулли § 9. Уравнение в полных дифференциалах § 10. Интегрирующий множитель § 11. Огибающая семейства кривых § 12. Особые решения дифференциального уравнения первого порядка § 13. Уравнение Клеро § 14. Уравнение Лагранжа § 15. Ортогональные и изогональные траектории § 16. 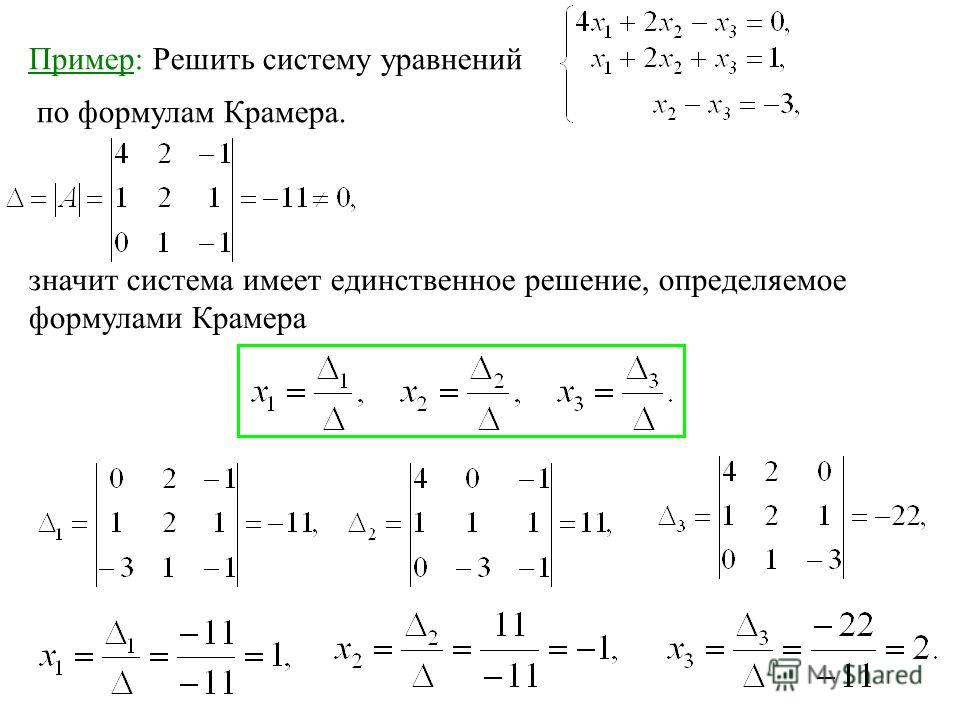 (n) = f(x) (n) = f(x)§ 18. Некоторые типы дифференциальных уравнений второго порядка, приводимых к уравнениям первого порядка. Задача о второй космической скорости § 19. Графический метод интегрирования дифференциального уравнения второго порядка § 20. Линейные однородные уравнения. Определения и общие свойства § 21. Линейные однородные уравнения второго порядка с постоянными коэффициентами § 22. Линейные однородные уравнения n-го порядка с постоянными коэффициентами § 23. Неоднородные линейные уравнения второго порядка § 24. Неоднородные линейные уравнения второго порядка с постоянными коэффициентами § 25. Неоднородные линейные уравнения высших порядков § 26. Дифференциальное уравнение механических колебаний § 27. Свободные колебания. Векторное и комплексное изображение гармонических колебаний § 28. Вынужденные колебания § 29. Системы обыкновенных дифференциальных уравнений § 30. Системы линейных дифференциальных уравнений с постоянными коэффициентами § 31. 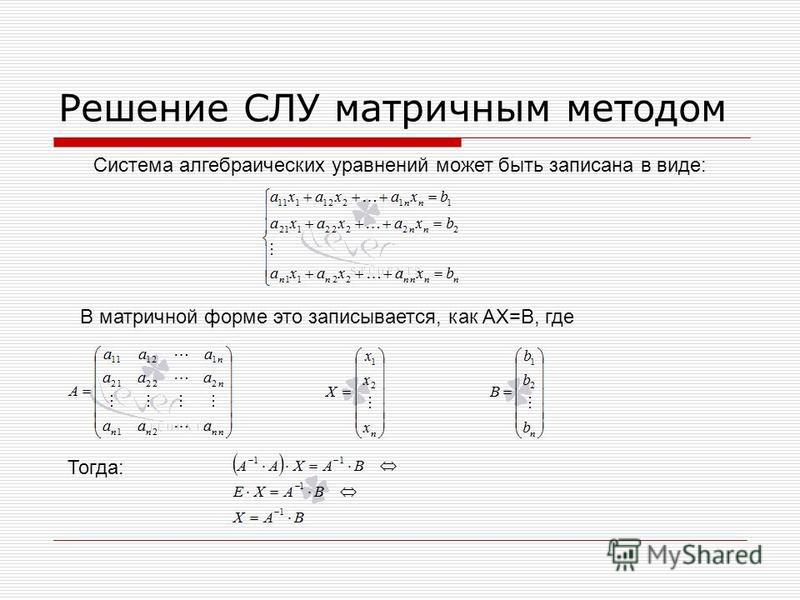 Понятие о теории устойчивости Ляпунова. Поведение траектории дифференциального уравнения в окрестности особой точки Понятие о теории устойчивости Ляпунова. Поведение траектории дифференциального уравнения в окрестности особой точки§ 32. Приближенное решение дифференциальных уравнений первого порядка методом Эйлера § 33. Разностный метод приближенного решения дифференциальных уравнений, основанный на применении формулы Тейлора.. Метод Адамса § 34. Приближенный метод интегрирования систем дифференциальных уравнений первого порядка Упражнения к главе XIII ГЛАВА XIV. КРАТНЫЕ ИНТЕГРАЛЫ § 2. Вычисление двойного интеграла § 3. Вычисление двойного интеграла (продолжение) § 4. Вычисление площадей и объемов с помощью двойных интегралов § 5. Двойной интеграл в полярных координатах § 6. Замена переменных в двойном интеграле (общий случай) § 7. Вычисление площади поверхности § 9. Момент инерции площади плоской фигуры § 10. Координаты центра масс площади плоской фигуры § 11. Тройной интеграл § 12. Вычисление тройного интеграла § 13. Замена переменных в тройном интеграле § 14.  Момент инерции и координаты центра масс тела Момент инерции и координаты центра масс тела§ 15. Вычисление интегралов, зависящих от параметра Упражнения к главе XIV ГЛАВА XV. КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ И ИНТЕГРАЛЫ ПО ПОВЕРХНОСТИ § 2. Вычисление криволинейного интеграла § 3. Формула Грина § 4. Условия независимости криволинейного интеграла от пути интегрирования § 5. Поверхностный интеграл § 6. Вычисление поверхностного интеграла § 7. Формула Стокса § 9. Оператор Гамильтона. Некоторые его применения Упражнения к главе XV ГЛАВА XVI. РЯДЫ § 1. Ряд. Сумма ряда § 2. Необходимый признак сходимости ряда § 3. Сравнение рядов с положительными членами § 4. Признак Даламбера § 5. Признак Коши § 6. Интегральный признак сходимости ряда § 7. Знакочередующиеся ряды. Теорема Лейбница § 8. Знакопеременные ряды. Абсолютная и условная сходимость § 9. Функциональные ряды § 10. Мажорируемые ряды § 11. Непрерывность суммы ряда § 12. Интегрирование и дифференцирование рядов § 13.  Степенные ряды. Интервал сходимости Степенные ряды. Интервал сходимости§ 14. Дифференцирование степенных рядов § 15. Ряды по степеням x-a § 16. Ряды Тейлора и Маклорена § 17. Примеры разложения функций в ряды § 18. Формула Эйлера § 19. Биномиальный ряд § 20. Разложение функции ln(1+x) в степенной ряд. Вычисление логарифмов § 21. Вычисление определенных интегралов с помощью рядов § 22. Интегрирование дифференциальных уравнений с помощью рядов § 23. Уравнение Бесселя § 24. Ряды с комплексными членами § 25. Степенные ряды с комплексной переменной § 26. Решение дифференциального уравнения первого порядка методом последовательных приближений (метод итераций) § 27. Доказательство существования решения дифференциального уравнения. Оценка погрешности при приближенном решении § 28. Теорема единственности решения дифференциального уравнения Упражнения к главе XVI ГЛАВА XVII. РЯДЫ ФУРЬЕ § 2. Примеры разложения функций в ряды Фурье § 3. Одно, замечание о разложении периодической функции в ряд Фурье § 4.  Ряды Фурье для четных и нечетных функций Ряды Фурье для четных и нечетных функций§ 5. Ряд Фурье для функции с периодом 2l § 6. О разложении непериодической функции в ряд Фурье § 7. Приближение в среднем заданной функции с помощью тригонометрического многочлена § 8. Интеграл Дирихле § 9. Сходимость ряда Фурье в данной точке § 10. Некоторые достаточные условия сходимости ряда Фурье § 11. Практический гармонический анализ § 12. Ряд Фурье в комплексной форме § 13. Интеграл Фурье § 14. Интеграл Фурье в комплексной форме § 15. Ряд Фурье по ортогональной системе функций § 16. Понятие о линейном функциональном пространстве. Аналогия между разложением функций в ряд Фурье и разложением векторов Упражнения к главе XVII ГЛАВА XVIII. УРАВНЕНИЯ МАТЕМАТИЧЕСКОЙ ФИЗИКИ § 1. Основные типы уравнений математической физики § 2. Вывод уравнения колебаний струны. Формулировка краевой задачи. Вывод уравнений электрических колебаний в проводах § 3. Решение уравнения колебаний струны методом разделения переменных (методом Фурье) § 4.  Уравнение распространения тепла в стержне. Формулировка краевой задачи Уравнение распространения тепла в стержне. Формулировка краевой задачи§ 5. Распространение тепла в пространстве § 6. Решение первой краевой задачи для уравнения теплопроводности методом конечных разностей § 7. Распространение тепла в неограниченном стержне § 8. Задачи, приводящие к исследованию решений уравнения Лапласа. Формулировка краевых задач § 9. Уравнение Лапласа в цилиндрических координатах. Решение задачи Дирихле для кольца с постоянными значениями искомой функции на внутренней и внешней окружностях § 10. Решение задачи Дирихле для круга § 11. Решение задачи Дирихле методом конечных разностей Упражнения к главе XVIII ГЛАВА XIX. ОПЕРАЦИОННОЕ ИСЧИСЛЕНИЕ И НЕКОТОРЫЕ ЕГО ПРИЛОЖЕНИЯ § 1. Начальная функция и ее изображение § 2. Изображение функций … § 3. Изображение функции с измененным масштабом независимой переменной. Изображение функций sin at, cos at § 4. Свойство линейности изображения § 5. Теорема смещения § 6. Изображение функций … § 7. 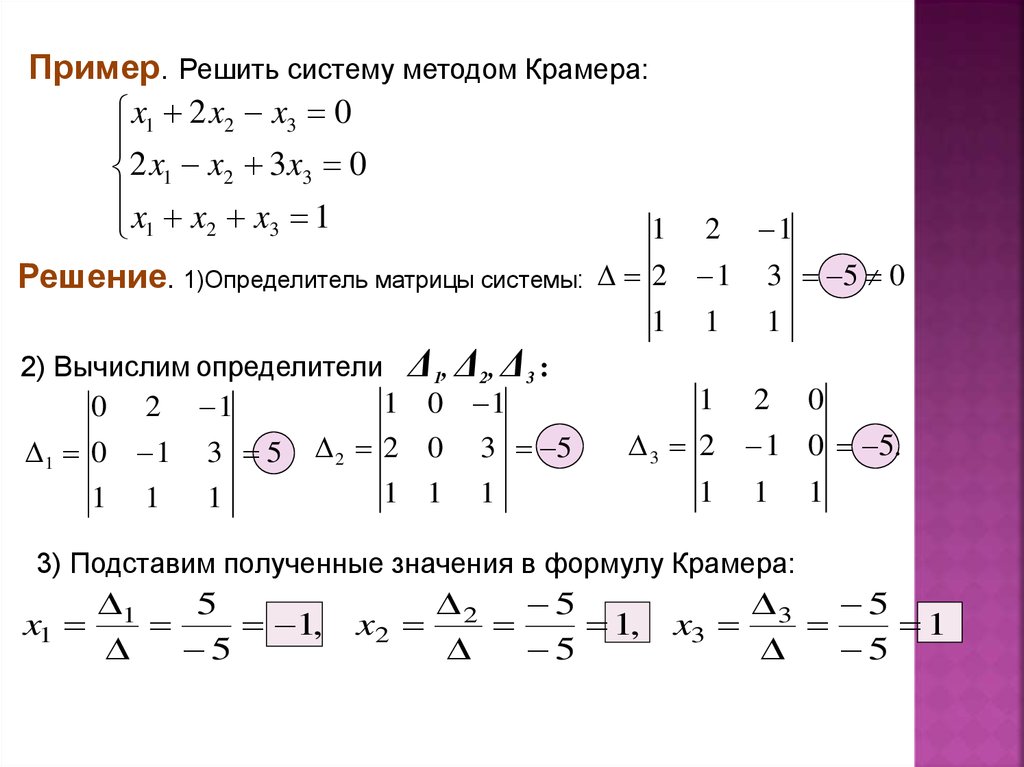 Дифференцирование изображения Дифференцирование изображения§ 8. Изображение производных § 9. Таблица некоторых изображений § 10. Вспомогательное уравнение для данного дифференциального уравнения § 11. Теорема разложения § 12. Примеры решения дифференциальных уравнений и систем дифференциальных уравнений операционным методом § 13. Теорема свертывания § 14. Дифференциальные уравнения механических колебаний. Дифференциальные уравнения теории электрических цепей § 15. Решение дифференциального уравнения колебаний § 16. Исследование свободных колебаний § 17. Исследование механических и электрических колебаний в случае периодической внешней силы § 18. Решение уравнения колебаний в случае резонанса § 19. Теорема запаздывания § 20. Дельта-функция и ее изображение Упражнения к главе XIX ГЛАВА XX. ЭЛЕМЕНТЫ ТЕОРИИ ВЕРОЯТНОСТЕЙ И МАТЕМАТИЧЕСКОЙ СТАТИСТИКИ § 1. Случайное событие. Относительная частота случайного события. Вероятность события. Предмет теории вероятностей § 2. 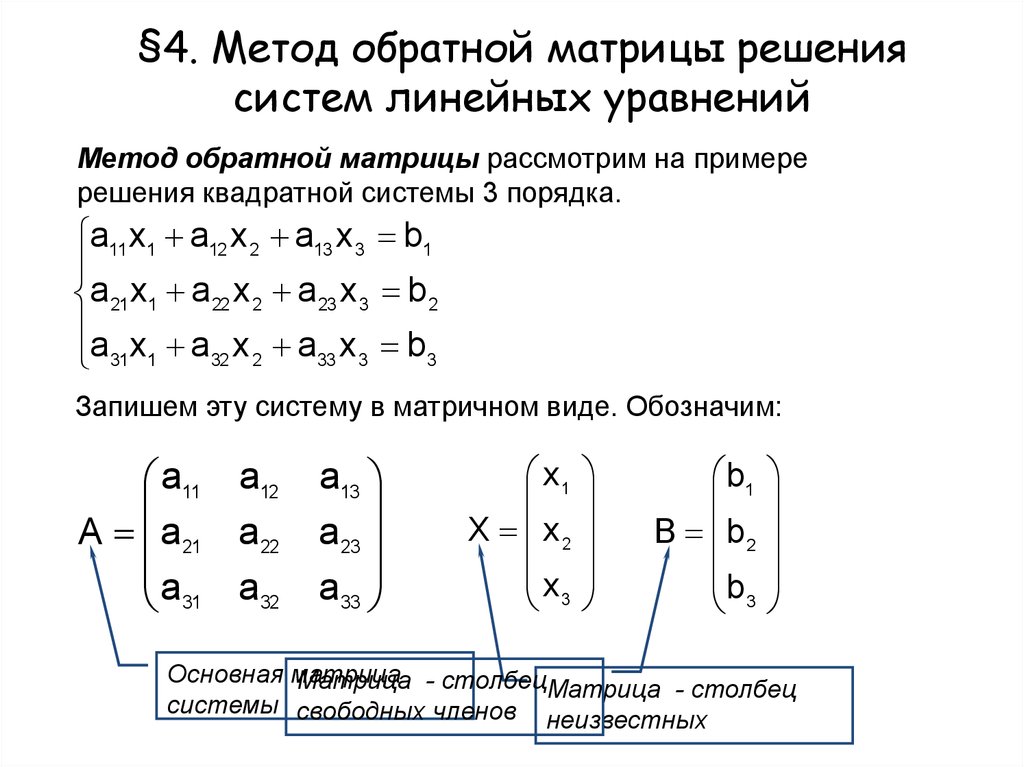 Классическое определение вероятности и непосредственный подсчет вероятностей Классическое определение вероятности и непосредственный подсчет вероятностей§ 3. Сложение вероятностей. Противоположные случайные события § 4. Умножение вероятностей независимых событий § 5. Зависимые события. Условная вероятность. Полная вероятность § 6. Вероятность гипотез. Формула Байеса § 7. Дискретная случайная величина. Закон распределения дискретной случайной величины § 8. Относительная частота и вероятность относительной частоты при повторных испытаниях § 9. Математическое ожидание дискретной случайной величины § 10. Дисперсия. Среднеквадратичное отклонение. Понятие о моментах § 11. Функции от случайных величин § 12. Непрерывная случайная величина. Плотность распределения непрерывной случайной величины. Вероятность попадания случайной величины в заданный интервал § 13. Функция распределения, или интегральный закон распределения. Закон равномерного распределения вероятностей § 14. Числовые характеристики непрерывной случайной величины § 15.  Нормальный закон распределения. Математическое ожидание нормального распределения Нормальный закон распределения. Математическое ожидание нормального распределения§ 16. Дисперсия и среднеквадратичное отклонение случайной величины, подчиненной нормальному закону распределения § 17. Вероятность попадания значения случайной величины в заданный интервал. Функция Лапласа. Интегральная функция распределения для нормального закона § 18. Вероятное (срединное) отклонение или срединная ошибка § 19. Выражение нормального закона распределения через срединное отклонение. Приведенная функция Лапласа § 20. Правило трех сигм. Шкала вероятностей распределения ошибок § 21. Среднеарифметическая ошибка § 22. Мера точности. Соотношение между характеристиками распределения ошибок § 23. Двумерная случайная величина § 24. Нормальный закон распределения на плоскости § 25. Вероятность попадания двумерной случайной величины в прямоугольник со сторонами, параллельными главным осям рассеивания, при нормальном законе распределения § 26. Вероятность попадания двумерной случайной величины в эллипс рассеивания § 27.  Задачи математической статистики. Статистический материал Задачи математической статистики. Статистический материал§ 28. Статистический ряд. Гистограмма § 29. Определение подходящего значения измеряемой величины § 30. Определение параметров закона распределения. Теорема Ляпунова. Теорема Лапласа Упражнения к главе XX ГЛАВА XXI. МАТРИЦЫ. МАТРИЧНАЯ ЗАПИСЬ СИСТЕМ И РЕШЕНИЙ СИСТЕМ ЛИНЕЙНЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ § 1. Линейные преобразования. Матрица § 2. Общие определения, связанные с понятием матрицы § 3. Обратное преобразование § 4. Действия над матрицами. Сложение матриц § 5. Преобразование вектора в другой вектор с помощью матрицы § 6. Обратная матрица § 7. Нахождение матрицы, обратной данной § 8. Матричная запись системы линейных уравнений § 9. Решение системы линейных уравнений матричным методом § 10. Ортогональные отображения. Ортогональные матрицы § 11. Собственный вектор линейного преобразования § 12. Матрица линейного преобразования, при котором базисные векторы являются собственными векторами § 13.  Преобразование матрицы линейного преобразования при переходе от одного базиса к другому Преобразование матрицы линейного преобразования при переходе от одного базиса к другому§ 14. Квадратичные формы и их преобразования § 15. Ранг матрицы. Существование решений системы линейных уравнений § 16. Дифференцирование и интегрирование матриц § 17. Матричная запись системы дифференциальных уравнений и решений системы дифференциальных уравнений с постоянными коэффициентами § 18. Матричная запись линейного уравнения n-го порядка § 19. Решение систем линейных дифференциальных уравнений с переменными коэффициентами методом последовательных приближений с использованием матричной записи Упражнения к главе XXI ПРИЛОЖЕНИЯ |

Работа с линейными системами в Python с помощью scipy.linalg — Real Python
линейных уравнений . В Python большинство подпрограмм, связанных с этой темой, реализованы в scipy.linalg , который предлагает очень быстрые возможности линейной алгебры.
В частности, 9Линейные системы 0003 играют важную роль в моделировании множества реальных проблем, а scipy.linalg предоставляет инструменты для их изучения и эффективного решения.
В этом руководстве вы узнаете, как:
- Применять понятия линейной алгебры к практическим задачам, используя
scipy.linalg - Работа с векторами и матрицами с использованием Python и NumPy
- Моделируйте практические задачи, используя линейные системы
- Решение линейных систем с использованием
scipy.linalg
Познакомившись с линейными системами, вы будете готовы к изучению матриц и метода наименьших квадратов в следующем уроке этой серии. А пока читайте дальше, чтобы начать работу с scipy.linalg .
Начало работы с
scipy.linalg SciPy — это библиотека Python с открытым исходным кодом, используемая для научных вычислений, включающая несколько модулей для общих задач науки и техники, таких как линейная алгебра, оптимизация, интеграция, интерполяция и обработка сигналов.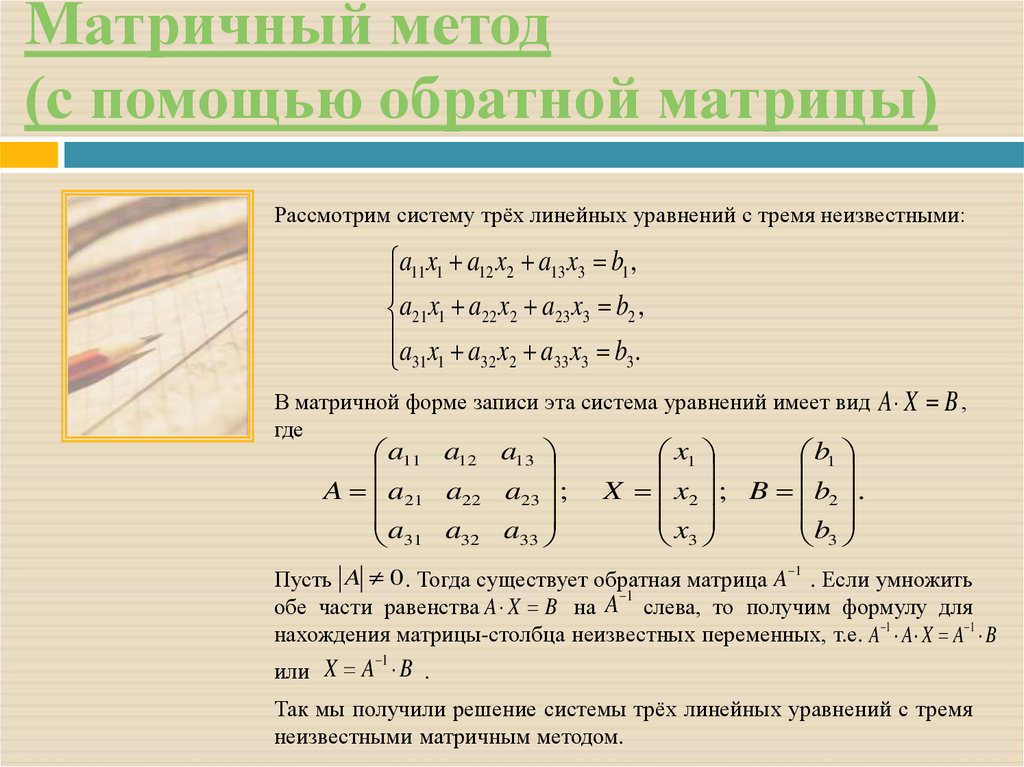 Это часть стека SciPy, который включает несколько других пакетов для научных вычислений, таких как NumPy, Matplotlib, SymPy, IPython и pandas.
Это часть стека SciPy, который включает несколько других пакетов для научных вычислений, таких как NumPy, Matplotlib, SymPy, IPython и pandas.
Линейная алгебра — это раздел математики, изучающий линейные уравнения и их представления с помощью векторов и матриц. Это фундаментальный предмет в нескольких областях инженерии и необходимое условие для более глубокого понимания машинного обучения.
scipy.linalg включает в себя несколько инструментов для работы с задачами линейной алгебры, включая функции для выполнения матричных вычислений, таких как определители, обратные, собственные значения, собственные векторы и разложение по сингулярным числам.
В этом руководстве вы будете использовать некоторые функции из scipy.linalg для решения практических задач, связанных с линейными системами. Чтобы использовать scipy.linalg , вам необходимо установить и настроить библиотеку SciPy, что вы можете сделать с помощью дистрибутива Anaconda Python и пакета conda и системы управления средой.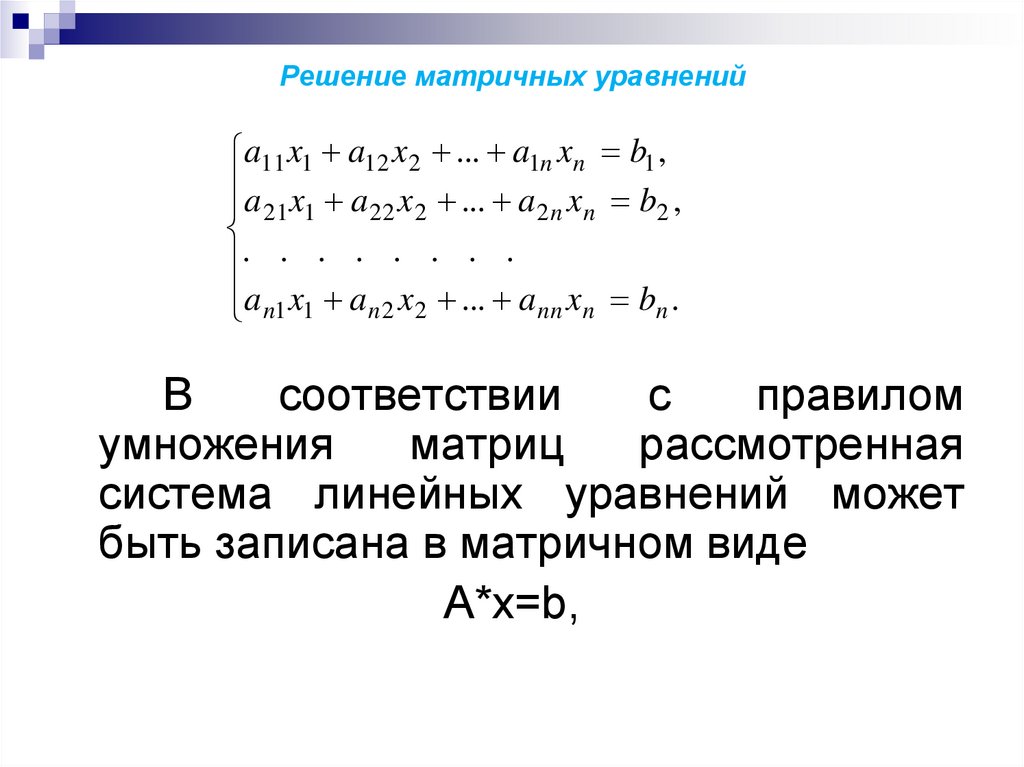
Для начала создайте среду conda и активируйте ее:
$ conda create --name linalg $ conda активировать linalg
После того, как вы активируете среду conda , в приглашении отобразится ее имя: linalg . Затем вы можете установить необходимые пакеты внутри среды:
(linalg) $ conda установить scipy jupyter
После выполнения этой команды системе потребуется некоторое время, чтобы определить зависимости и продолжить установку.
Примечание: Помимо использования SciPy, вы также собираетесь использовать Jupyter Notebook для запуска кода в интерактивной среде. Это не обязательно, но облегчает работу с числовыми и научными приложениями.
Чтобы освежить в памяти работу с Jupyter Notebook, ознакомьтесь с документом Jupyter Notebook: An Introduction.
Если вы предпочитаете следовать руководству, используя другой дистрибутив Python и диспетчер пакетов pip , разверните сворачиваемый раздел ниже, чтобы увидеть, как настроить среду:
Во-первых, вы должны создать виртуальную среду, в которой вы будете устанавливать пакеты. Предполагая, что у вас установлен Python, вы можете создать и активировать виртуальную среду с именем 9.0009 линальг :
Предполагая, что у вас установлен Python, вы можете создать и активировать виртуальную среду с именем 9.0009 линальг :
- Окна
- Linux + macOS
PS> python -m venv linalg PS> .\linalg\Scripts\Activate
$ python -m venv linalg $ источник ./linalg/bin/активировать
После того, как вы активируете виртуальную среду, в приглашении отобразится ее имя: linalg . Затем вы можете установить необходимые пакеты внутри среды, используя pip :
(linalg) $ python -m pip install scipy jupyter
Системе потребуется некоторое время, чтобы определить зависимости и продолжить установку. После завершения команды все готово для использования scipy.linalg и Jupyter.
Перед открытием Jupyter Notebook вам необходимо зарегистрировать среду linalg , чтобы вы могли создавать ноутбуки, используя ее в качестве ядра.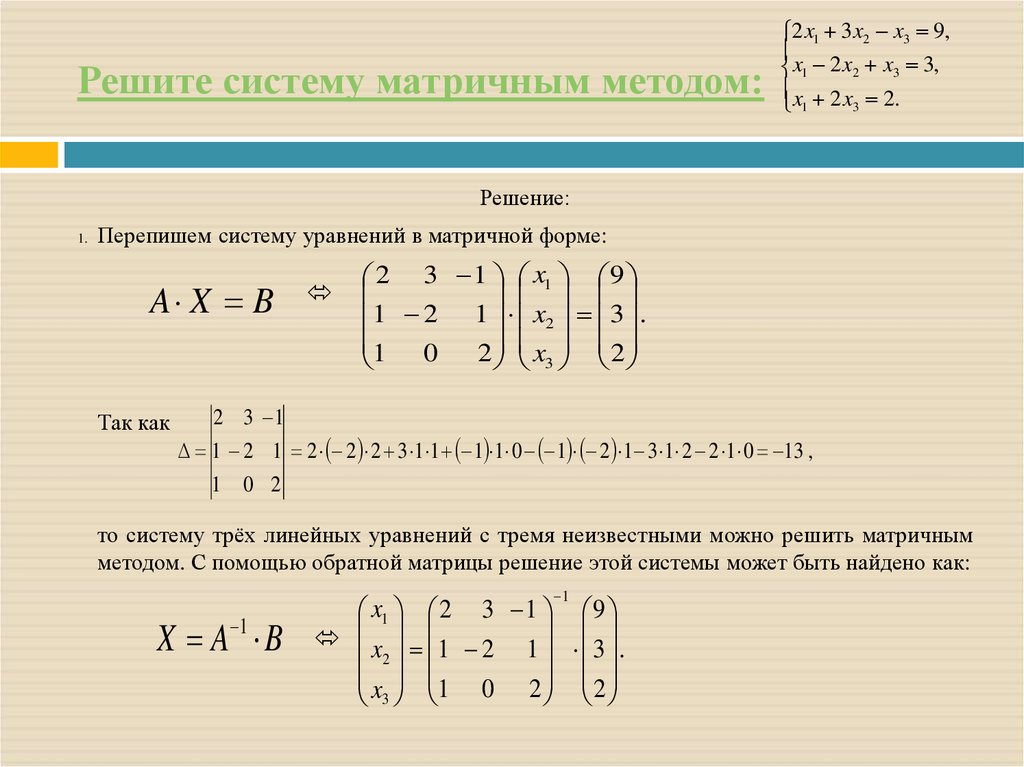 Для этого при активированной среде
Для этого при активированной среде linalg выполните следующую команду:
(linalg) $ python -m ipykernel install --user --name linalg
Теперь вы можете открыть Jupyter Notebook, выполнив следующую команду:
$ ноутбук jupyter
После загрузки Jupyter в браузере создайте новую записную книжку, нажав New → linalg , как показано ниже:
Внутри ноутбука вы можете проверить успешность установки, импортировав пакет scipy :
>>>
В [1]: импорт scipy
Если вы не видите ошибки импорта, вы готовы продолжить.
Теперь, когда вы закончили настройку среды, вы увидите, как работать с векторами и матрицами в Python, что является основой использования scipy.linalg для работы с приложениями линейной алгебры.
Удаление рекламы
Работа с векторами и матрицами с помощью NumPy
Вектор — это математическая единица, используемая для представления физических величин, которые имеют как величину, так и направление. Это фундаментальный инструмент для решения инженерных задач и задач машинного обучения. Так же матрицы , которые используются для представления векторных преобразований, среди прочего.
Это фундаментальный инструмент для решения инженерных задач и задач машинного обучения. Так же матрицы , которые используются для представления векторных преобразований, среди прочего.
NumPy — наиболее часто используемая библиотека для работы с матрицами и векторами в Python и используется с scipy.linalg для работы с приложениями линейной алгебры. В этом разделе вы познакомитесь с основами его использования для создания матриц и векторов и выполнения над ними операций.
Чтобы начать работать с матрицами и векторами, первое, что вам нужно сделать в Jupyter Notebook, это импортировать число . Обычный способ сделать это — использовать псевдоним np :
>>>
В [1]: импортировать numpy как np
Для представления матриц и векторов NumPy использует специальный тип ndarray .
Чтобы создать объект ndarray , вы можете использовать np. , который ожидает массивоподобный объект, такой как список или вложенный список.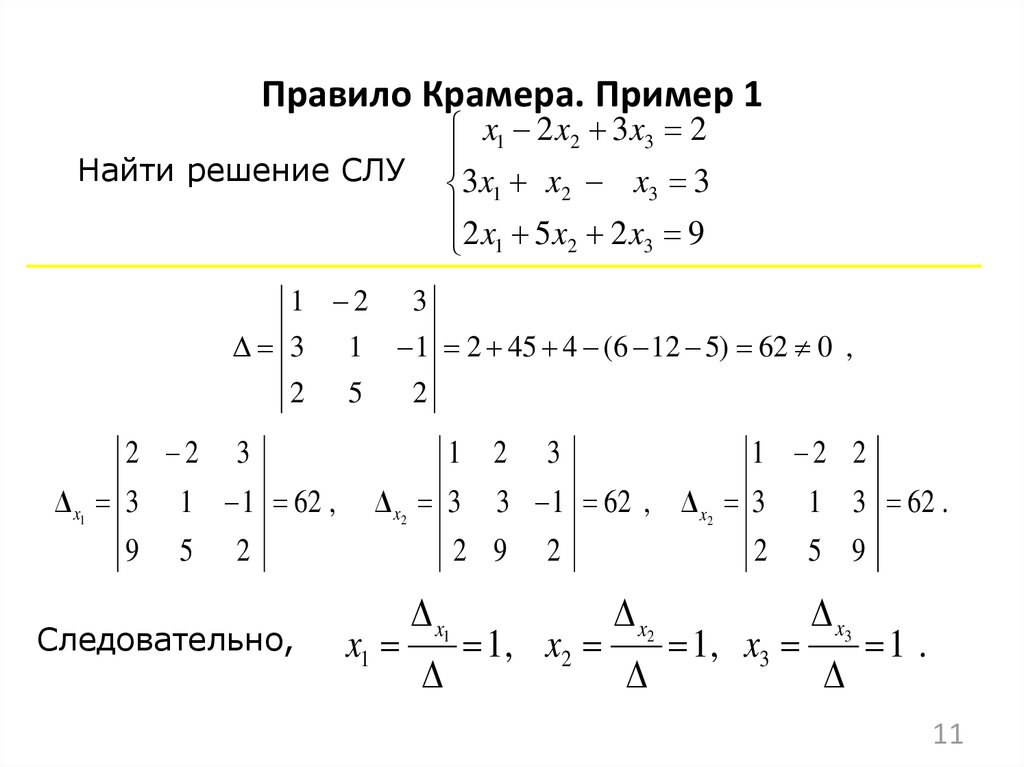 array()
array()
В качестве примера представьте, что вам нужно создать следующую матрицу:
Чтобы создать его с помощью NumPy, вы можете использовать np.array() , предоставляя вложенный список, содержащий элементы каждой строки матрицы:
>>>
В [2]: A = np.array([[1, 2], [3, 4], [5, 6]])
...: А
Выход[2]:
массив([[1, 2],
[3, 4],
[5, 6]])
Как вы могли заметить, NumPy обеспечивает визуальное представление матрицы, в котором вы можете идентифицировать ее столбцы и строки.
Стоит отметить, что элементы массива NumPy должны быть одного типа. Вы можете проверить тип массива NumPy, используя .dtype :
>>>
В [3]: A.dtype
Выход[3]:
dtype('int64')
Поскольку все элементы A являются целыми числами, массив был создан с типом int64 . Если один из элементов является числом с плавающей запятой, то массив будет создан с типом
Если один из элементов является числом с плавающей запятой, то массив будет создан с типом float64 :
>>>
В [4]: A = np.array([[1.0, 2], [3, 4], [5, 6]])
...: А
Выход[4]:
массив([[1., 2.],
[3., 4.],
[5., 6.]])
В [5]: A.dtype
Выход[5]:
dtype('float64')
Чтобы проверить размеры объекта ndarray , вы можете использовать .shape . Например, чтобы проверить размеры A , вы можете использовать A.shape :
>>>
В [6]: A.shape Выход[6]: (3, 2)
Как и ожидалось, размеры матрицы A равны 3 × 2 , поскольку A имеет три строки и два столбца.
При работе с задачами, связанными с матрицами, вам часто придется использовать операцию транспонирования, которая меняет местами столбцы и строки матрицы.
Чтобы транспонировать вектор или матрицу, представленную объектом ndarray , вы можете использовать . или 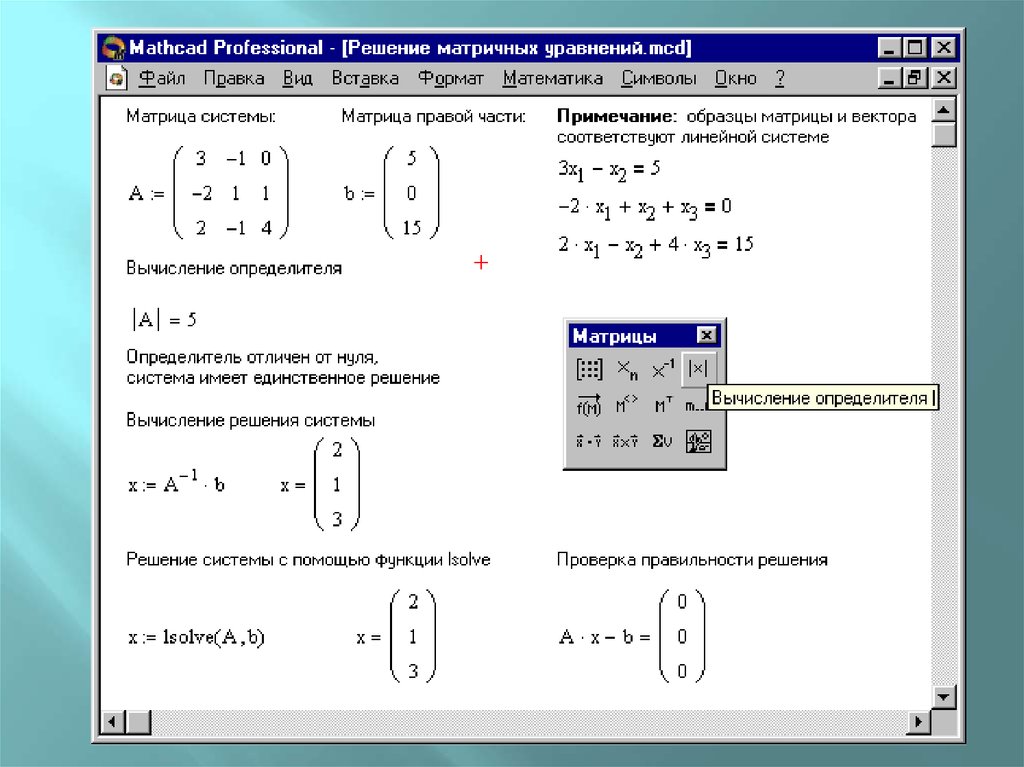 transpose()
transpose() .T . Например, вы можете получить транспонирование A с A.T :
>>>
В [7]: А.Т.
Выход[7]:
массив([[1., 3., 5.],
[2., 4., 6.]])
При перестановке столбцы A становятся строками A.T , а строки становятся столбцами.
Чтобы создать вектор, вы также используете np.array() , предоставляя список с элементами вектора:
>>>
В [8]: v = np.array([1, 2, 3]) ...: в Выход[8]: массив([1, 2, 3])
Чтобы проверить размеры вектора, вы используете .shape , как и раньше:
>>>
В [9]: v.shape Выход[9]: (3,)
Обратите внимание, что форма этого вектора (3,) , а не (3, 1) или (1, 3) . Это функция NumPy, которая актуальна, если вы привыкли работать с MATLAB.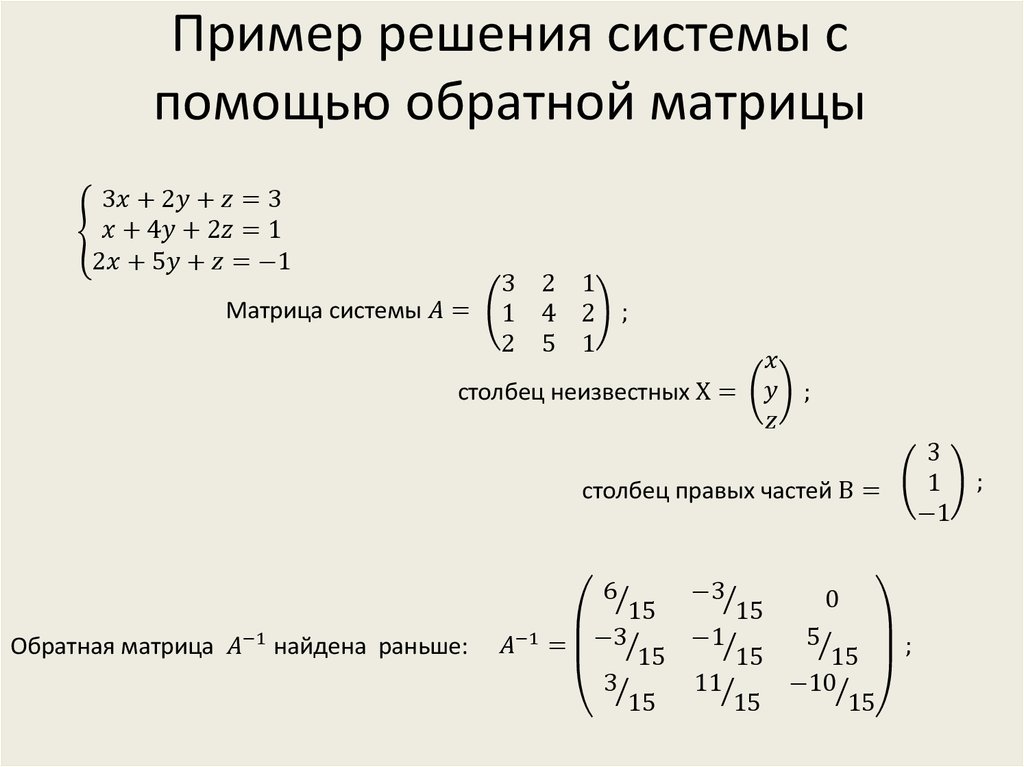 В NumPy можно создавать одномерные массивы типа
В NumPy можно создавать одномерные массивы типа v , что может вызвать проблемы при выполнении операций между матрицами и векторами. Например, операция транспонирования не влияет на одномерные массивы.
Всякий раз, когда вы предоставляете аргумент, подобный одномерному массиву, для np.array() , результирующий массив будет одномерным массивом. Чтобы создать двумерный массив, вы должны указать аргумент, подобный двумерному массиву, например вложенный список:0011
>>>
В [10]: v = np.array([[1, 2, 3]]) ...: v.форма Выход[10]: (1, 3)
В приведенном выше примере размеры v равны 1 × 3 , что соответствует размерам двумерного вектора-строки. Чтобы создать вектор-столбец, вы можете использовать вложенный список:
>>>
В [11]: v = np.array([[1], [2], [3]]) ...: v.форма Выход[11]: (3, 1)
В данном случае размеры v равны 3 × 1 , что соответствует размерам двумерного вектора-столбца.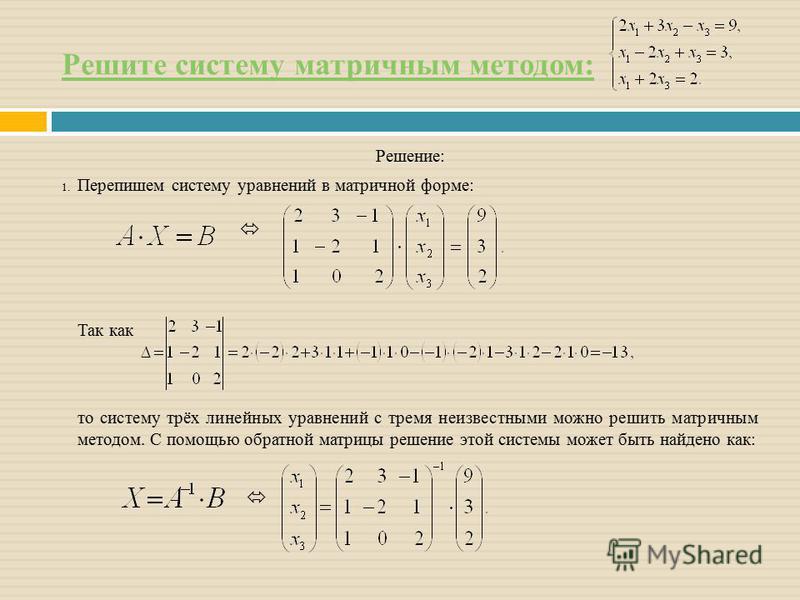
Использование вложенных списков для создания векторов может быть трудоемким, особенно для векторов-столбцов, которые вы, вероятно, будете использовать чаще всего. В качестве альтернативы вы можете создать одномерный вектор, предоставив плоский список np.array и использовать .reshape() для изменения размеров объекта ndarray :
>>>
В [12]: v = np.array([1, 2, 3]).reshape(3, 1) ...: v.форма Выход[12]: (3, 1)
В приведенном выше примере вы используете .reshape() для получения вектора-столбца формы (3, 1) из одномерного вектора формы (3,) . Стоит отметить, что .reshape() ожидает, что количество элементов нового массива будет совместимо с количеством элементов исходного массива. Другими словами, количество элементов в массиве с новой формой должно быть равно количеству элементов в исходном массиве.
В этом примере вы также можете использовать . без явного определения количества строк массива: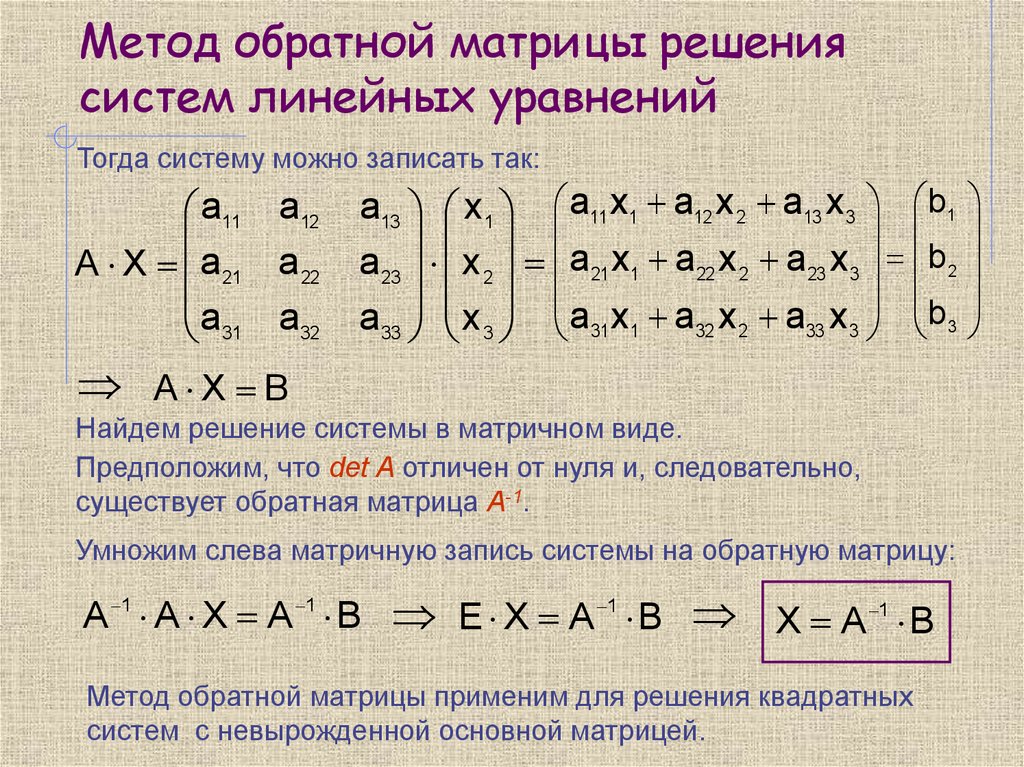 reshape()
reshape()
>>>
В [13]: v = np.array([1, 2, 3]).reshape(-1, 1) ...: v.форма Исход[13]: (3, 1)
Здесь -1 , которое вы указываете в качестве аргумента для .reshape() , представляет количество строк, необходимых для того, чтобы новый массив имел только один столбец, как указано вторым аргументом. В этом случае, поскольку исходный массив состоит из трех элементов, количество строк для нового массива будет равно 9.0009 3 .
В практических приложениях вам часто нужно создавать матрицы из нулей, единиц или случайных элементов. Для этого NumPy предоставляет некоторые удобные функции, которые вы увидите далее.
Удаление рекламы
Использование удобных функций для создания массивов
NumPy также предоставляет некоторые удобные функции для создания массивов.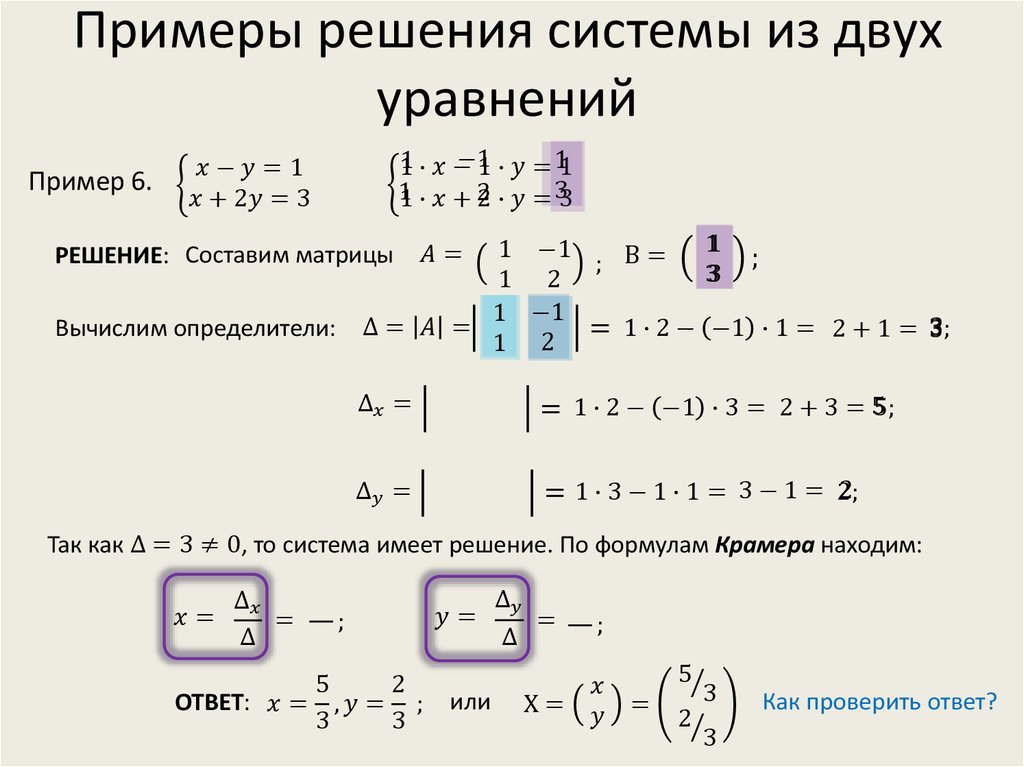 Например, чтобы создать массив, заполненный нулями, вы можете использовать
Например, чтобы создать массив, заполненный нулями, вы можете использовать np.zeros() :
>>>
В [1]: импортировать numpy как np
В [2]: np.zeros((3, 2))
Выход[2]:
массив([[0., 0.],
[0., 0.],
[0., 0.]])
В качестве первого аргумента np.zeros() ожидает кортеж, указывающий форму массива, который вы хотите создать, и возвращает массив типа float64 .
Примечание: Чтобы указать тип массива, который создаст np.zeros() , вы можете передать аргумент для dtype . Например, np.zeros((3, 2), dtype=int) создает массив целых чисел.
Аналогично, для создания массивов, заполненных единицами, можно использовать np.ones() :
>>>
В [3]: np.ones((2, 3))
Выход[3]:
массив([[1., 1., 1.],
[1., 1., 1.]])
Стоит отметить, что np. также возвращает массив типа 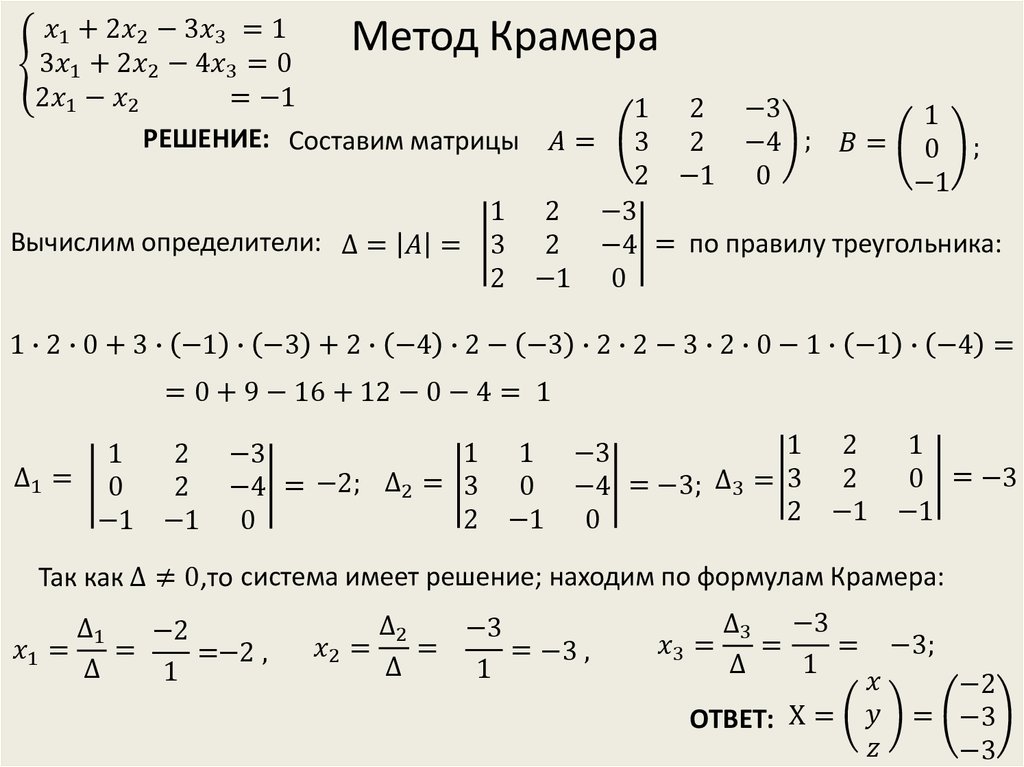 ones()
ones() float64 .
Для создания массивов со случайными элементами вы можете использовать np.random.rand() :
>>>
В [4]: np.random.rand(3, 2)
Выход[4]:
массив([[0.8206045 , 0.54470809],
[0,94, 0,05677859],
[0,71148476, 0,4709059 ]])
np.random.rand() возвращает массив случайных чисел от 0 до 1 , взятых из равномерного распределения. Обратите внимание, что, в отличие от np.zeros() и np.ones() , np.random.rand() не ожидает кортеж в качестве аргумента.
Точно так же, чтобы получить массив со случайными элементами, взятыми из нормального распределения с нулевым средним и единичной дисперсией, вы можете использовать np.random.randn() :
>>>
В [5]: np.random.randn(3, 2) Выход[5]: массив([[-1.20019512, -1.78337814], [-0,22135221, -0,38805899], [0,17620202, -2,05176764]])
 random.randn(3, 2)
Выход[5]:
массив([[-1.20019512, -1.78337814],
[-0,22135221, -0,38805899],
[0,17620202, -2,05176764]])
random.randn(3, 2)
Выход[5]:
массив([[-1.20019512, -1.78337814],
[-0,22135221, -0,38805899],
[0,17620202, -2,05176764]])
Теперь, когда вы завершили создание массивов, вы увидите, как выполнять с ними операции.
Выполнение операций с массивами NumPy
Обычные операции Python с использованием сложения ( + ), вычитания ( - ), умножения ( * ), деления (/9).0010 ) и операции экспоненты ( ** ) над массивами всегда выполняются поэлементно. Если один из операндов является скаляром, то вы будете выполнять операцию между скаляром и каждым элементом массива.
Например, чтобы создать матрицу, заполненную элементами, равными 10 , вы можете использовать np.ones() и умножить результат на 10 , используя оператор * :
>>>
В [1]: импортировать numpy как np В [2]: 10 * np.ones ((2, 2)) Выход[2]: массив([[10.
 , 10.],
[10., 10.]])
, 10.],
[10., 10.]])
Если оба операнда являются массивами одинаковой формы, то вы выполните операцию между соответствующими элементами массивов:
>>>
В [3]: A = 10 * np.ones((2, 2))
...: B = np.array([[2, 2], [5, 5]])
...: А * Б
Выход[3]:
массив([[20., 20.],
[50., 50.]])
Здесь вы умножаете каждый элемент матрицы A на соответствующий элемент матрицы B .
Чтобы выполнить умножение матриц в соответствии с правилами линейной алгебры, вы можете использовать оператор умножения матриц ( @ ):
>>>
В [4]: A = np.array([[1, 2], [3, 4]])
...: v = np.массив ([[5], [6]])
...: А@в
Выход[4]:
массив([[17],
[39]])
Здесь вы умножаете матрицу 2 × 2 с именем A на вектор 2 × 1 с именем v .
Вы можете получить тот же результат, используя np. , хотя вместо этого рекомендуется использовать  dot()
dot() @ :
>>>
В [5]: A = np.array([[1, 2], [3, 4]])
...: v = np.массив ([[5], [6]])
...: np.dot(A, v)
Выход[5]:
массив([[17],
[39]])
Помимо основных операций для работы с матрицами и векторами, NumPy также предоставляет некоторые специальные функции для работы с линейной алгеброй в numpy.linalg . Однако для этих приложений scipy.linalg имеет некоторые преимущества, как вы увидите дальше.
Удалить рекламу
Сравнение
scipy.linalg С numpy.linalg NumPy включает в себя некоторые инструменты для работы с приложениями линейной алгебры в 9Модуль 0009 numpy.linalg . Однако, если вы не хотите добавлять SciPy в качестве зависимости в свой проект, обычно лучше использовать scipy.linalg по следующим причинам:
Как поясняется в официальной документации,
scipy.содержит все функции linalg numpy.linalgплюс некоторые дополнительные расширенные функции, которые не включены вnumpy.linalg.scipy.linalgвсегда компилируется с поддержкой BLAS и LAPACK, которые представляют собой библиотеки, включающие подпрограммы для оптимизированного выполнения числовых операций. Дляnumpy.linalg, использование BLAS и LAPACK необязательно. Таким образом, в зависимости от того, как вы устанавливаете NumPy, функцииscipy.linalgмогут работать быстрее, чем функцииnumpy.linalg.
 linalg
linalg В общем, учитывая, что научные и технические приложения обычно не имеют ограничений относительно зависимостей, рекомендуется установить SciPy и использовать scipy.linalg вместо numpy.linalg .
В следующем разделе вы будете использовать scipy.linalg инструменты для работы с линейными системами. Вы начнете с изучения основ на простом примере, а затем примените концепции к практической задаче.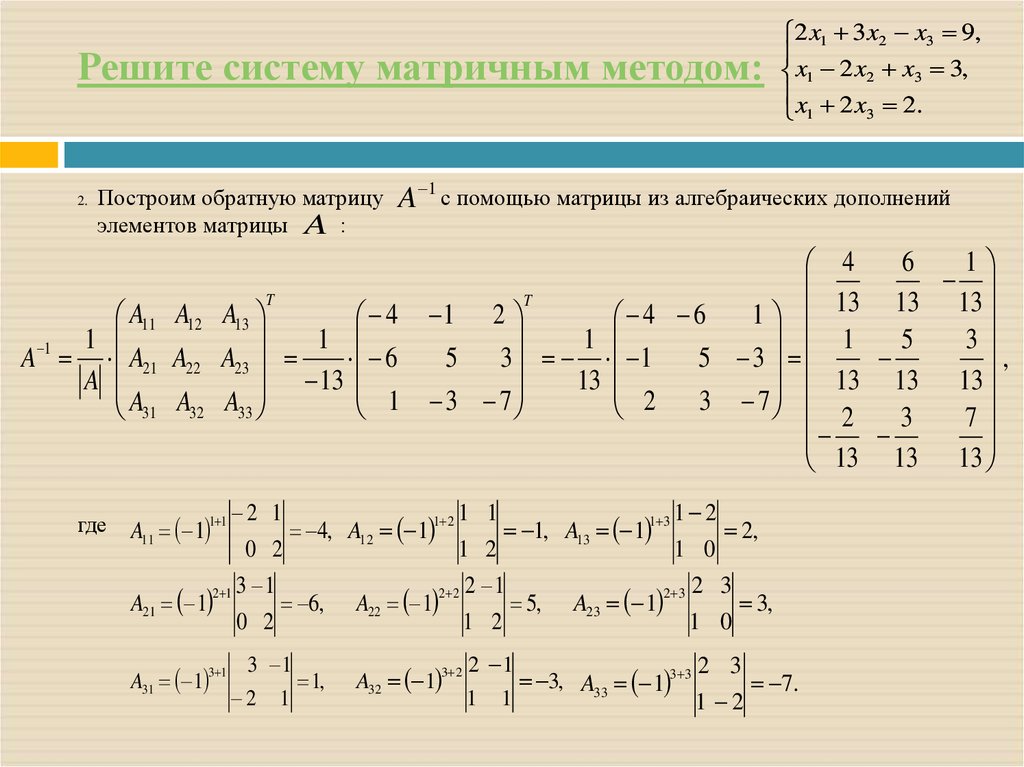
Использование
scipy.linalg.solve() для решения линейных системЛинейные системы могут быть полезным инструментом для решения нескольких практических и важных проблем, включая проблемы, связанные с движением транспортных средств, химическими уравнениями, электрическими цепями и полиномиальной интерполяцией.
В этом разделе вы узнаете, как использовать scipy.linalg.solve() для решения линейных систем. Но прежде чем приступить к коду, важно понять основы.
Знакомство с линейными системами
Линейная система или, точнее, система линейных уравнений — это набор уравнений, линейно относящихся к набору переменных. Вот пример линейной системы, относящейся к переменным x ₁, x ₂ и х ₃:
Здесь у вас есть три уравнения с тремя переменными. Чтобы иметь линейную систему , значения K ₁, …, K ₉ и b ₁, b ₂, b ₃ должны быть константами.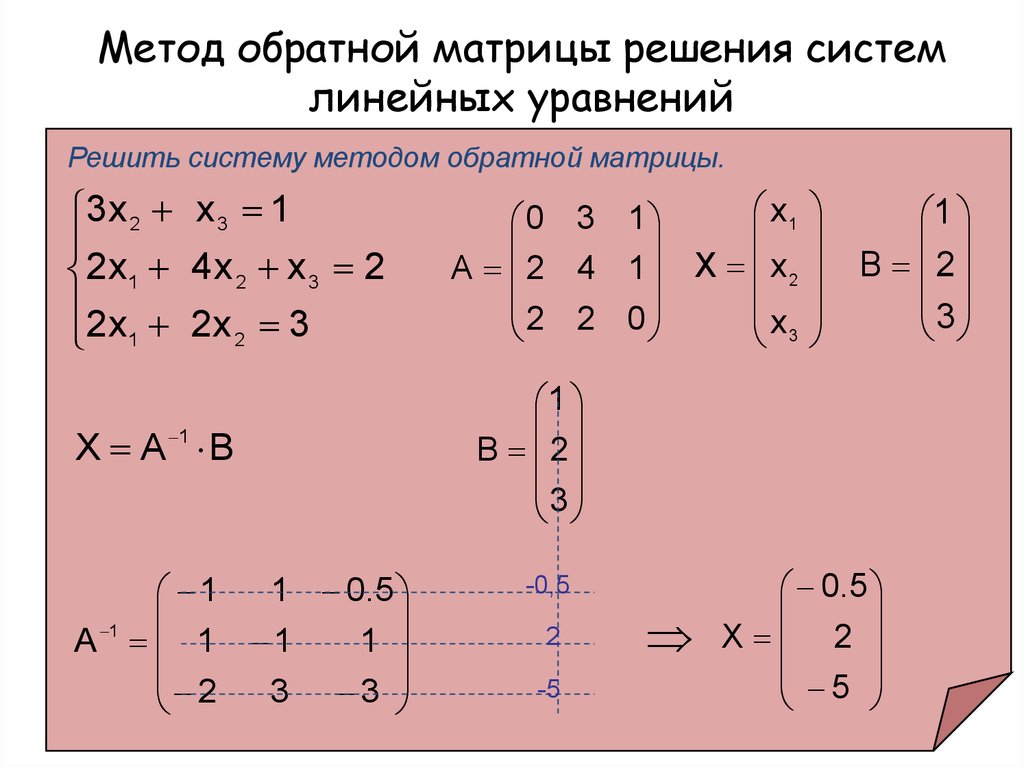
Когда есть только два или три уравнения и переменных, можно выполнить расчеты вручную, объединить уравнения и найти значения для переменных. Однако при наличии четырех и более переменных ручное решение линейной системы занимает значительное время, и возрастает риск совершения ошибок.
Практические приложения обычно включают большое количество переменных, что делает невозможным решение линейных систем вручную. К счастью, есть несколько инструментов, которые могут выполнить эту тяжелую работу, например scipy.linalg.solve() .
Использование
scipy.linalg.solve() SciPy предоставляет scipy.linalg.solve() для быстрого и надежного решения линейных систем. Чтобы увидеть, как это работает, рассмотрим следующую систему:
Чтобы использовать scipy.linalg.solve() , вам нужно сначала записать линейную систему как матричное произведение , как в следующем уравнении:
Обратите внимание, что вы получите исходные уравнения системы после вычисления матричного произведения.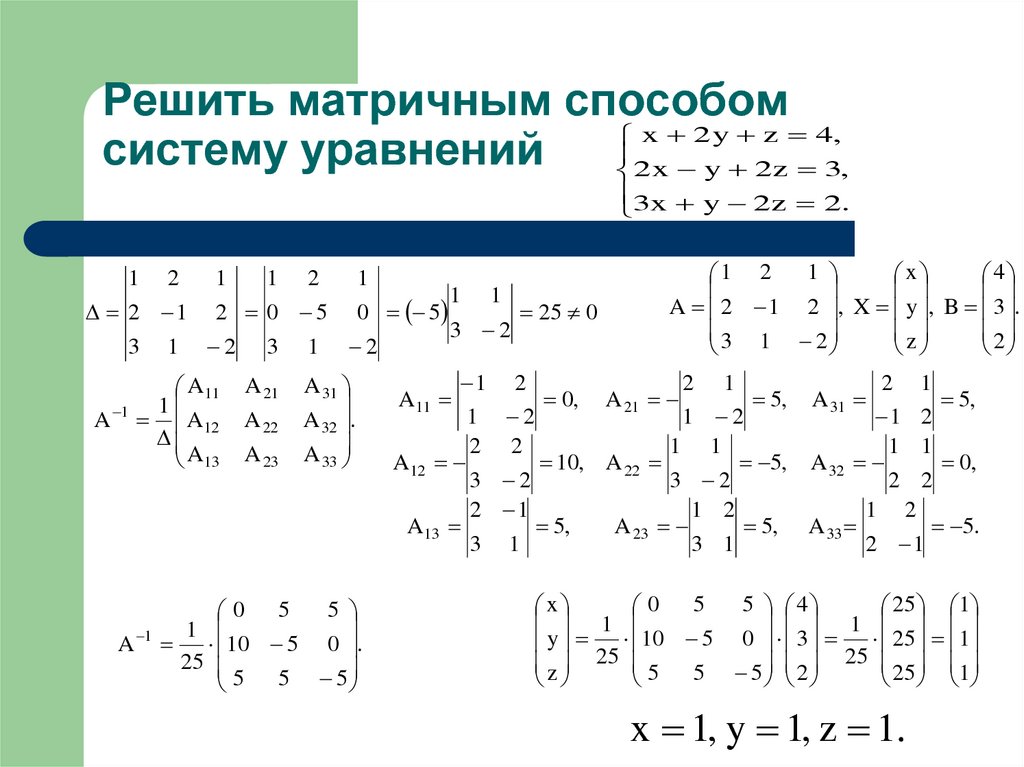 Входные данные, которые ожидает
Входные данные, которые ожидает scipy.linalg.solve() , представляют собой матрицу A и вектор b , которые вы можете определить с помощью массивов NumPy. Таким образом, вы можете решить систему, используя следующий код:
>>>
1In [1]: импортировать numpy как np 2 ...: из scipy import linalg 3 4В [2]: A = np.array( 5 ...: [ 6...: [3, 2], 7 ...: [2, -1], 8 ...: ] 9...:) 10 11В [3]: b = np.array([12, 1]).reshape((2, 1)) 12 13В [4]: x = linalg.solve(A, b) 14 ...: х 15Аут[4]: 16массив([[2.], 17 [3.]])
Вот разбивка того, что происходит:
Строки 1 и 2 импортируют NumPy как
npвместе сlinalgизscipy.Строки с 4 по 9 создают матрицу коэффициентов в виде массива NumPy и называют ее
A.Строка 11 создает вектор независимых терминов с использованием массива NumPy с именем
b. Чтобы сделать его вектор-столбцом с двумя линиями, вы используете .reshape((2, 1)).Строки 13 и 14 вызывают
linalg.solve()для решения линейной системы, характеризуемойAиb, с сохранением результата вx, который распечатывается. Обратите внимание, чтоsolve()возвращает решение с компонентами с плавающей запятой, хотя все элементы исходных массивов являются целыми числами.
 Чтобы сделать его вектор-столбцом с двумя линиями, вы используете
Чтобы сделать его вектор-столбцом с двумя линиями, вы используете Если заменить x ₁=2 и x ₂=3 в исходных уравнениях, то можно убедиться, что это решение системы.
Теперь, когда вы ознакомились с основами использования scipy.linalg.solve() , пришло время попробовать практическое применение линейных систем.
Удаление рекламы
Решение практической задачи: составление плана питания
Одна из проблем, которую вы обычно решаете с помощью линейных систем, — это когда вам нужно найти пропорции компонентов, необходимые для получения определенной смеси.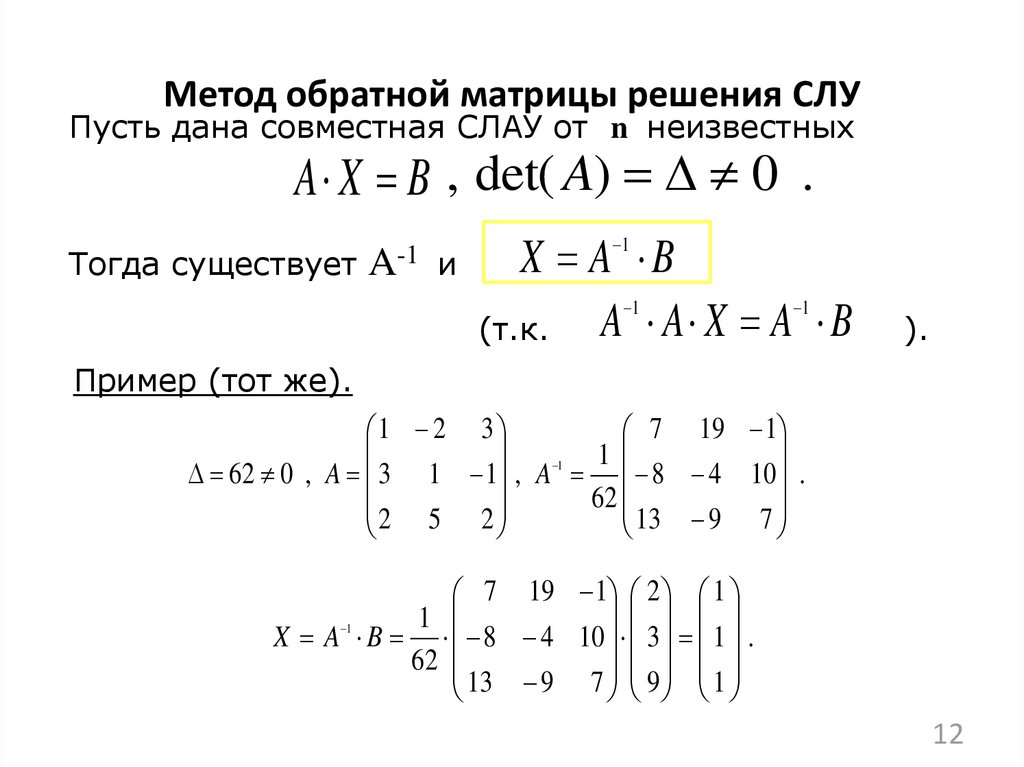 Ниже вы собираетесь использовать эту идею для построения плана питания, смешивая разные продукты, чтобы получить сбалансированную диету.
Ниже вы собираетесь использовать эту идею для построения плана питания, смешивая разные продукты, чтобы получить сбалансированную диету.
Для этого предположим, что сбалансированная диета должна включать следующее:
- 170 единиц витамина А
- 180 единиц витамина B
- 140 единиц витамина С
- 180 единиц витамина D
- 350 единиц витамина Е
Ваша задача состоит в том, чтобы найти количество различных продуктов, чтобы получить указанное количество необходимых витаминов. В следующей таблице представлены результаты анализа одного грамма каждого продукта в пересчете на единицы каждого витамина:
| Еда | Витамин А | Витамин В | Витамин С | Витамин D | Витамин Е |
|---|---|---|---|---|---|
| #1 | 1 | 10 | 1 | 2 | 2 |
| #2 | 9 | 1 | 0 | 1 | 1 |
| #3 | 2 | 2 | 5 | 1 | 2 |
| #4 | 1 | 1 | 1 | 2 | 13 |
| #5 | 1 | 1 | 1 | 9 | 2 |
Обозначая еду 1 как x ₁ и так далее, и учитывая, что вы собираетесь смешать x ₁ единиц еды 1, x ₂ единиц еды 2 и так далее, вы можете написать выражение для количества витамина А, которое вы получите в комбинации.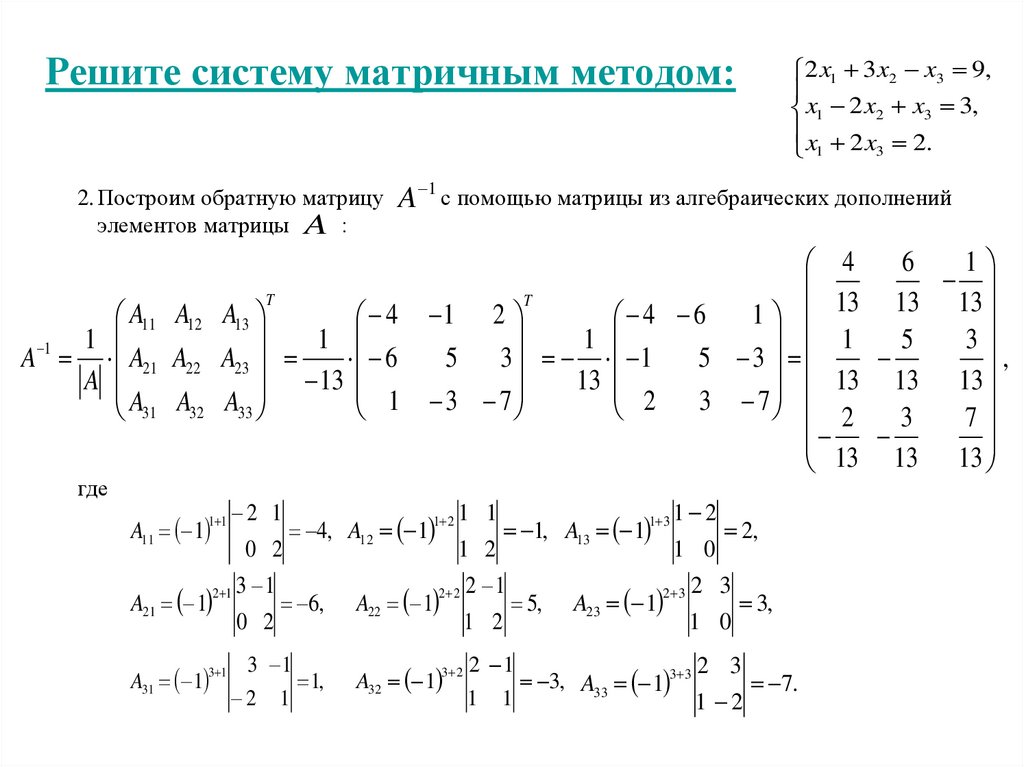 Учитывая, что сбалансированная диета должна включать 170 единиц витамина А, вы можете использовать данные из столбца Витамин А, чтобы написать следующее уравнение:
Учитывая, что сбалансированная диета должна включать 170 единиц витамина А, вы можете использовать данные из столбца Витамин А, чтобы написать следующее уравнение:
Повторяя ту же процедуру для витаминов B, C, D и E, вы получите следующую линейную систему:
Чтобы использовать scipy.linalg.solve() , вы должны получить матрицу коэффициентов A и вектор независимых членов b , которые задаются следующим образом:
Теперь вы можете использовать scipy.linalg.solve() , чтобы узнать количества x ₁, …, x ₅:
>>>
В [1]: импортировать numpy как np ...: из scipy import linalg В [2]: A = np.array( ...: [ ...: [1, 9, 2, 1, 1], ...: [10, 1, 2, 1, 1], ...: [1, 0, 5, 1, 1], ...: [2, 1, 1, 2, 9], ...: [2, 1, 2, 13, 2], ...: ] ...:) В [3]: b = np.array([170, 180, 140, 180, 350]).reshape((5, 1)) В [4]: x = linalg.solve(A, b) .
 ..: Икс
Выход[4]:
массив([[10.],
[10.],
[20.],
[20.],
[10.]])
..: Икс
Выход[4]:
массив([[10.],
[10.],
[20.],
[20.],
[10.]])
Указывает на то, что сбалансированный рацион должен включать 10 единиц продукта 1, 10 единиц продукта 2, 20 единиц продукта 3, 20 единиц продуктов питания 4 и 10 единиц продуктов питания 5.
Заключение
Поздравляем! Вы узнали, как использовать некоторые концепции линейной алгебры и как использовать scipy.linalg для решения задач, связанных с линейными системами. Вы видели, что векторы и матрицы полезны для представления данных и что, используя концепции линейной алгебры, вы можете моделировать практические проблемы и эффективно их решать.
В этом уроке вы узнали, как:
- Применить концепции линейной алгебры к практическим задачам, используя
scipy.linalg - Работа с векторами и матрицами с использованием Python и NumPy
- Моделирование практических задач с использованием линейных систем
- Решите линейных систем, используя
scipy.
