Векторное произведение в EXCEL. Примеры и описание
Найдем векторное произведение 2-х векторов с помощью функций MS EXCEL. Также создадим таблицу для проверки векторов на коллинеарность.
Сначала немного теории. Векторным произведением двух векторов а и b , заданных в прямоугольной системе координат трехмерного пространства, называется такой вектор c , что:
- он перпендикулярен обоим векторам а и b ;
- длина вектора с равна произведению длин векторов а и b на синус угла между ними;
- вектор с направлен так, что тройка векторов а , b и с является правой (
с конца вектора


Почему такое сложное определение? Дело в том, что результатом векторного произведения [ a х b ], в отличие от скалярного , является вектор. А для того, чтобы однозначно определить вектор нужно задать его длину (второй пункт определения) и направление (первый и третий пункты определения).
Векторное произведение двух векторов a = { a x ; a y ; a z } и b = { b x ; b y ; b z } в декартовой системе координат можно вычислить, используя формулы:
[ a х b ] = { a y b z — a z b y ; a z b x — a x b z ; a x b y — a y b x }
или в матричной форме:
Теперь вычислим векторное произведение в MS EXCEL.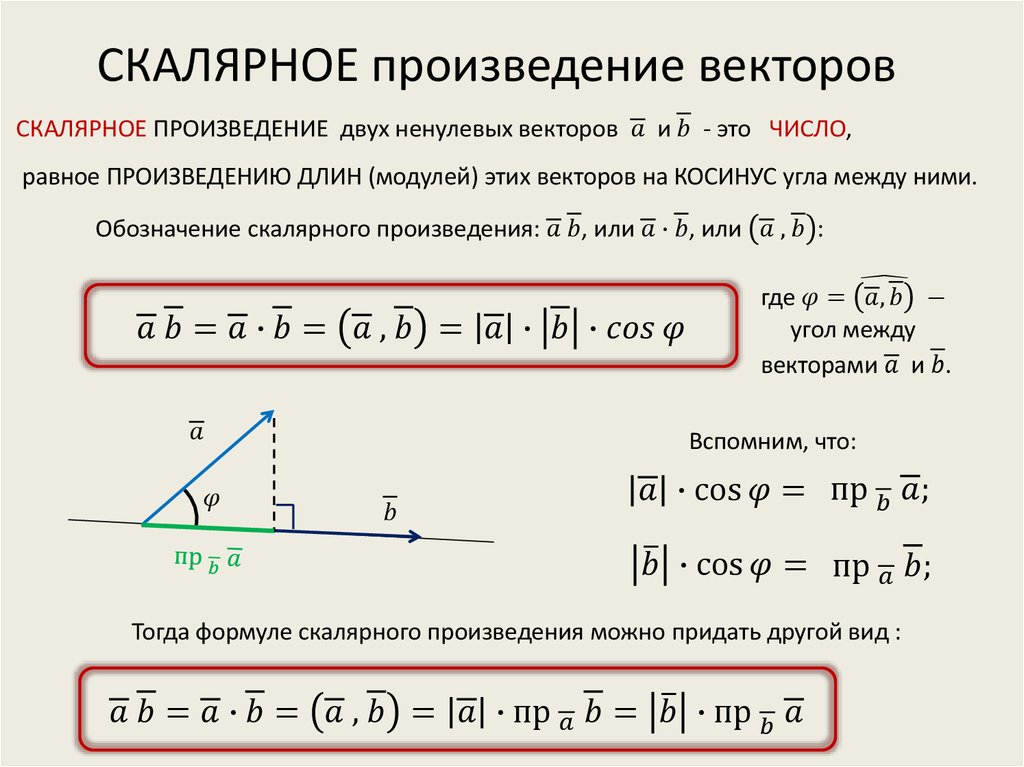 Встроенная функция к сожалению отсутствует. Кроме того, формула должна возвращать три значения, т.е. 3 координаты вектора. Это может быть реализовано только
формулой массива
(вариант, когда 3 координаты рассчитываются независимо, с использованием 3-х различных формул, очевиден, но не интересен, хотя и приведен
файле примера
).
Встроенная функция к сожалению отсутствует. Кроме того, формула должна возвращать три значения, т.е. 3 координаты вектора. Это может быть реализовано только
формулой массива
(вариант, когда 3 координаты рассчитываются независимо, с использованием 3-х различных формул, очевиден, но не интересен, хотя и приведен
файле примера
).
Пусть даны координаты векторов а и b , записанные в строках 8 и 9 (см. файл примера ).
Обратим внимание, что запись в матричной форме напоминает вычисление обратной матрицы методом алгебраических дополнений . Вместо единичных векторов i, j, k запишем вспомогательный вектор с координатами {1; 1; 1} и поместим его в строке 7 над векторами. Теперь у нас есть квадратная матрица А третьего порядка, для которой можно вычислить обратную матрицу.
Попробуем использовать функцию
МОБР()
для вычисления векторного произведения.
Примечание : Напомним, что алгебраическое дополнение A ij вычисляется по формуле A ij =(-1) i+j *М ij (где М — соответствующий минор, т.е. определитель, состоящий из элементов матрицы А за исключением всех элементов, расположенных на строке i и в столбце j).
Так как обратная матрица вычисляется по формуле:
то имея обратную матрицу, для вычисления верхней строки матрицы алгебраических дополнений и, соответственно, координат вектора с , необходимо ее
транспонировать
, а затем умножить ее на определитель матрицы А (той, что содержит координаты наших векторов
Это реализовано с помощью формулы массива =ТРАНСП(МОБР(B7:D9))*МОПРЕД(B7:D9)
Коллинеарность векторов
Если два вектора коллинеарны, т. е. лежат на параллельных прямых, то их векторное произведение равно 0. В
файле примеров
приведена таблица для проверки векторов на коллинеарность.
е. лежат на параллельных прямых, то их векторное произведение равно 0. В
файле примеров
приведена таблица для проверки векторов на коллинеарность.
Нахождение длины вектора с — результата векторного произведения
Из определения векторного произведения длина вектора с равна произведению длин векторов а и b на синус угла между ними.
Примечание : Как вычислить длины векторов по их координатам показано в статье Вычисление длины (модуля) вектора в MS EXCEL .
Синус угла найдем через тригонометрическую формулe sin 2 x+cos 2 x=1
Конечно, можно также сначала найти векторное произведение, а затем длину полученного вектора. Естественно, оба метода расчета дают одинаковые результаты.
Формула проекции. Векторы и операции над векторами. Виды проекций вектора
Решение задач на равновесие сходящихся сил с помощью построения замкнутых силовых многоугольников сопряжено с громоздкими построениями. Универсальным методом решения таких задач является переход к определению проекций заданных сил на координатные оси и оперирование с этими проекциями. Осью называют прямую линию, которой приписано определенное направление.
Универсальным методом решения таких задач является переход к определению проекций заданных сил на координатные оси и оперирование с этими проекциями. Осью называют прямую линию, которой приписано определенное направление.
Проекция вектора на ось является скалярной величиной, которая определяется отрезком оси, отсекаемым перпендикулярами, опущенными на нее из начала и конца вектора.
Проекция вектора считается положительной, если направление от начала проекции к ее концу совпадает с положительным направлением оси. Проекция вектора считается отрицательной, если направление от начала проекции к ее концу противоположно положительному направлению оси.
Таким образом, проекция силы на ось координат равна произведению модуля силы на косинус угла между вектором силы и положительным направлением оси.
Рассмотрим ряд случаев проецирования сил на ось:
Вектор силы F (рис. 15) составляет с положительным направлением оси х острый угол .
Чтобы найти проекцию, из начала и конца вектора силы опускаем перпендикуляры на ось oх ; получаем
1. F x = F cos α
F x = F cos α
Проекция вектора в данном случае положительна
Сила F (рис. 16) составляет с положительным направлением оси х тупой угол α.
Тогда F x = F cos α, но так как α = 180 0 — φ,
F x = F cos α = F cos180 0 — φ =- F cos φ.
Проекция силы F на ось oх в данном случае отрицательна.
Сила F (рис. 17) перпендикулярна оси oх .
Проекция силы F на ось х равна нулю
F x = F cos 90° = 0.
Силу, расположенную на плоскости хоу (рис. 18), можно спроектировать на две координатные оси ох и оу .
Силу F можно разложить на составляющие: F x и F y . Модуль вектора F x равен проекции вектора F на ось ox , а модуль вектора F y равен проекции вектора F на ось oy .
Из ΔОАВ : F x =F cos α, F x =F sin α.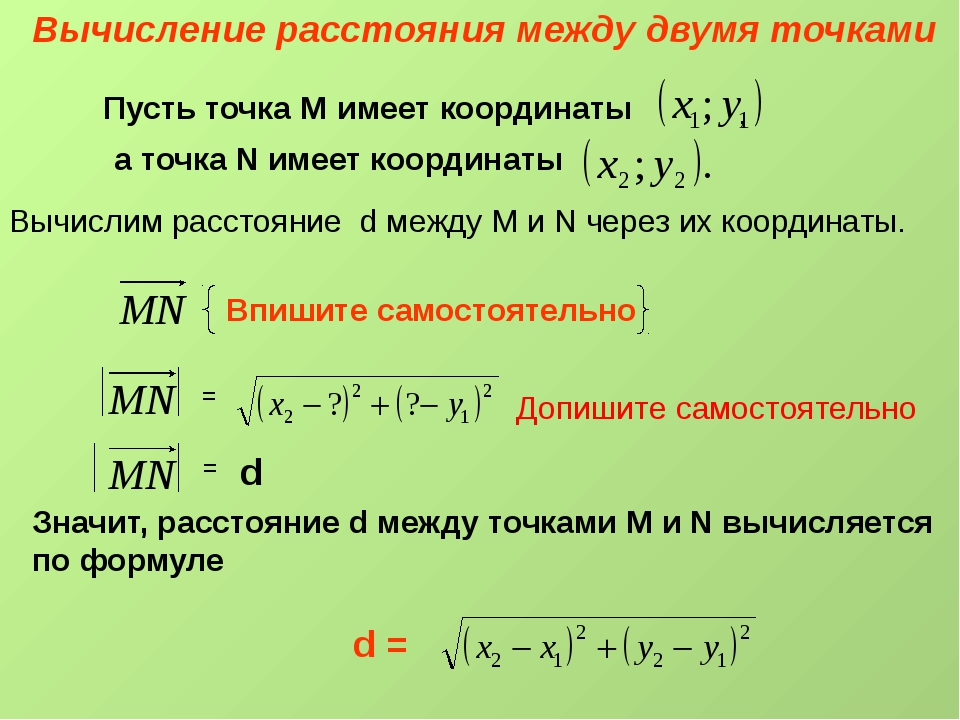
Из ΔОАС : F x =F cos φ, F x =F sin φ.
Модуль силы можно найти по теореме Пифагора:
Проекция векторной суммы или равнодействующей на какую-либо ось равна алгебраической сумме проекций слагаемых векторов на ту же ось.
Рассмотрим сходящиеся силы F 1 , F 2 , F 3 , и F 4 , (рис. 19, а). Геометрическая сумма, или равнодействующая, этих сил F определяется замыкающей стороной силового многоугольника
Опустим из вершин силового многоугольника на ось x перпендикуляры.
Рассматривая полученные проекции сил непосредственно из выполненного построения, имеем
F = F 1x +F 2x +F 3x + F 4x
где n — число слагаемых векторов. Их проекции входят вышеуказанное уравнение с соответствующим знаком.
В плоскости геометрическую сумму сил можно спроецировать на две координатные оси, а в пространстве – соответственно на три.
Введение…………………………………………………………………………3
1. Значение вектора и скаляра………………………………………….4
2. Определение проекции, оси и координатой точки…………………5
3. Проекция вектора на ось………………………………………………6
4. Основная формула векторной алгебры……………………………..8
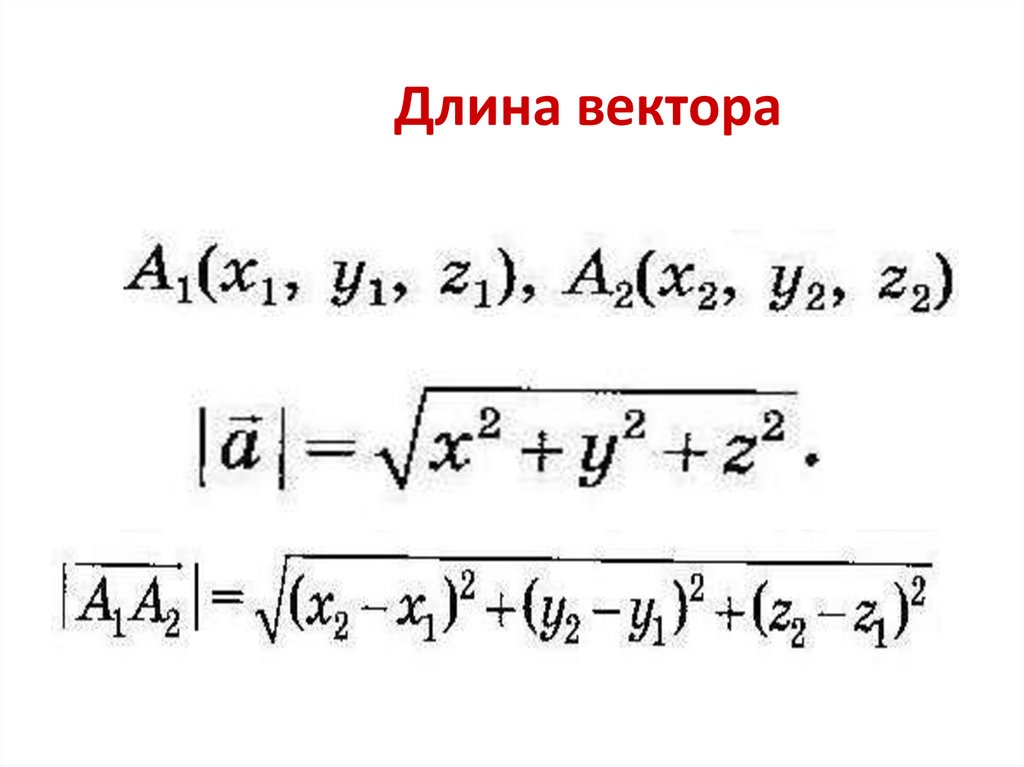
5. Вычисление модуля вектора по его проекциям……………………9
Заключение………………………………………………………………………11
Литература………………………………………………………………………12
Введение:
Физика неразрывно связана с математикой. Математика дает физике средства и приемы общего и точного выражения зависимости между физическими величинами, которые открываются в результате эксперимента или теоретических исследований.Ведь основной метод исследований в физике – экспериментальный. Это значит – вычисления ученый выявляет с помощью измерений. Обозначает связь между различными физическими величинами. Затем, все переводится на язык математики. Формируется математическая модель.
Итак, физика создает модель окружающего нас мира и изучает ее свойства. Но любая модель является ограниченной. При создании моделей того или иного явления принимаются во внимание только существенные для данного круга явлений свойства и связи. В этом и заключается искусство ученого — из всего многообразия выбрать главное.
Физические модели являются математическими, но не математика является их основой. Количественные соотношения между физическими величинами выясняются в результате измерений, наблюдений и экспериментальных исследований и лишь выражаются на языке математики. Однако другого языка для построения физических теорий не существует.
1. Значение вектора и скаляра.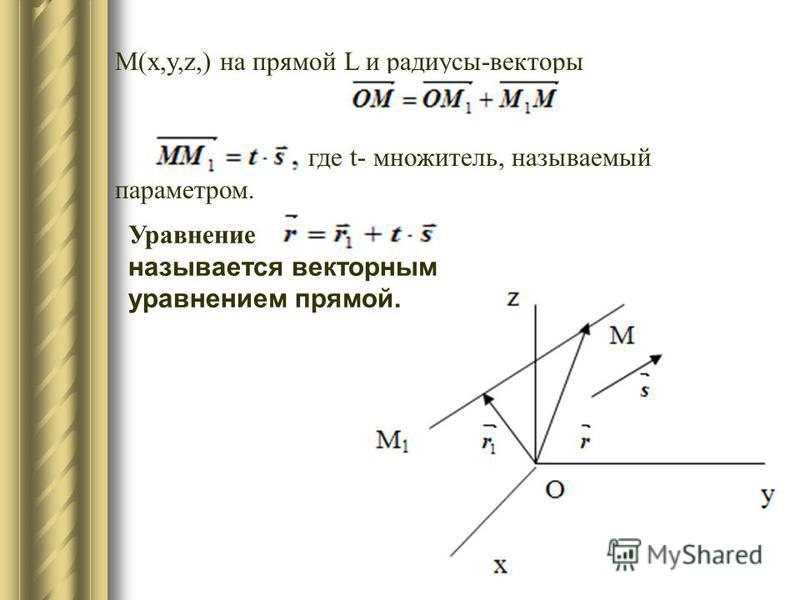
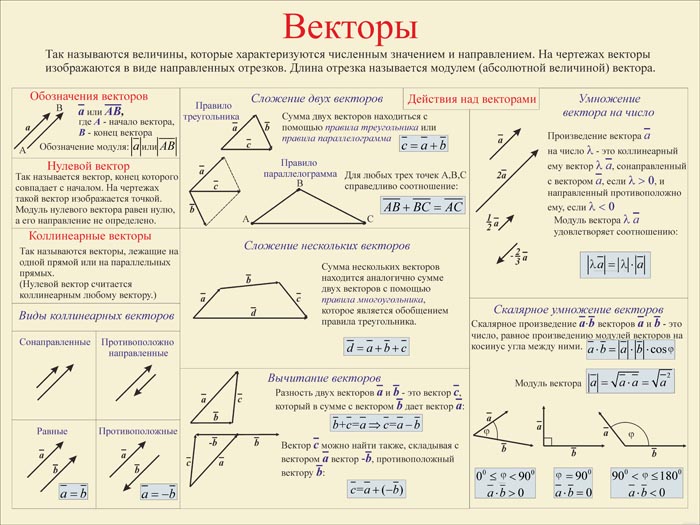
В физике и математике вектор — это величина, которая характеризуется своим численным значением и направлением. В физике встречается немало важных величин, являющихся векторами, например сила, положение, скорость, ускорение, вращающий момент, импульс, напряженность электрического и магнитного полей. Их можно противопоставить другим величинам, таким, как масса, объем, давление, температура и плотность, которые можно описать обычным числом, и называются они «скалярами» .
Они записываются либо буквами обычного шрифта, либо цифрами (а, б, t, G, 5, −7….). Скалярные величины могут быть положительными и отрицательными. В то же время некоторые объекты изучения могут обладать такими свойствами, для полного описания которых знание только числовой меры оказывается недостаточным, необходимо ещё охарактеризовать эти свойства направлением в пространстве. Такие свойства характеризуются векторными величинами (векторами). Векторы, в отличие от скаляров, обозначаются буквами жирного шрифта: a, b, g, F, С ….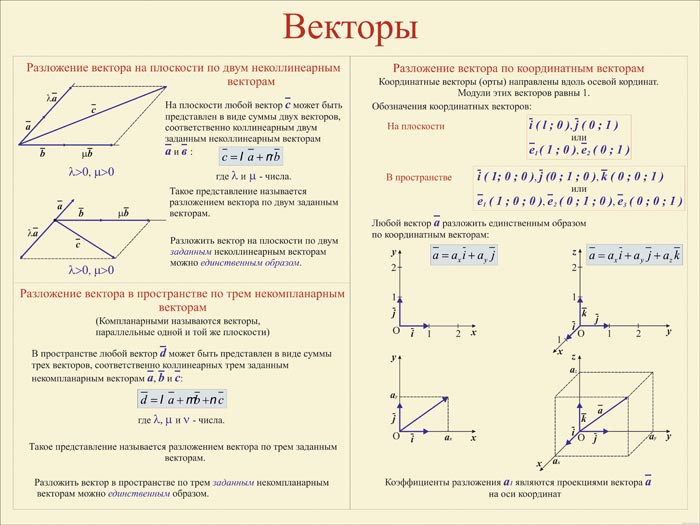
Нередко вектор обозначают буквой обычного (нежирного) шрифта, но со стрелкой над ней:
Кроме того, часто вектор обозначают парой букв (обычно заглавных), причём первая буква обозначает начало вектора, а вторая — его конец.
Модуль вектора, то есть длину направленного прямолинейного отрезка, обозначают теми же буквами, как и сам вектор, но в обычном (не жирном) написании и без стрелки над ними, либо точно также как и вектор (то есть жирным шрифтом или обычным, но со стрелкой), но тогда обозначение вектора заключается в вертикальные черточки.
Вектор – сложный объект, который одновременно характеризуется и величиной и направлением.
Не бывает также положительных и отрицательных векторов. А вот равными между собой векторы быть могут. Это когда, например, aиb имеют одинаковые модули и направлены в одну сторону. В этом случае справедлива запись a = b. Надо также иметь в виду, что перед символом вектора может стоять знак минус, например, — с, однако, этот знак символически указывает на то, что вектор -с имеет такой же модуль, как и вектор с, но направлен в противоположную сторону.
Вектор -с называют противоположным (или обратным) вектору с.
В физике же каждый вектор наполнен конкретным содержанием и при сравнении однотипных векторов (например, сил) могут иметь существенное значение и точки их приложения.
2.Определение проекции, оси и координатой точки.
Ось – это прямая, которой придается какое–то направление.
Ось обозначается какой-либо буквой: X , Y , Z , s , t … Обычно на оси выбирается (произвольно) точка, которая называется началом отсчета и, как правило, обозначается буквой О. От этой точки отсчитываются расстояния до других интересующих нас точек.
Проекцией точки на ось называется основание перпендикуляра, опущенного из этой точки на данную ось. То есть, проекцией точки на ось является точка.
Координатой точки на данной оси называется число, абсолютная величина которого равна длине отрезка оси (в выбранном масштабе), заключённого между началом оси и проекцией точки на эту ось. Это число берется со знаком плюс, если проекция точки располагается в направлении оси от ее начала и со знаком минус, если в противоположном направлении.
3.Проекция вектора на ось.
Проекцией вектора на ось называется вектор, который получается в результате перемножения скалярной проекции вектора на эту ось и единичного вектора этой оси. Например, если а x – скалярная проекция вектора а на ось X, то а x ·i — его векторная проекция на эту ось.
Обозначим векторную проекцию также, как и сам вектор, но с индексом той оси на которую вектор проектируется. Так, векторную проекцию вектора а на ось Х обозначим а x (жирная буква, обозначающая вектор и нижний индекс названия оси) или
(нежирная буква, обозначающая вектор, но со стрелкой наверху (!) и нижний индекс названия оси).
Скалярной проекцией вектора на ось называется число , абсолютная величина которого равна длине отрезка оси (в выбранном масштабе), заключённого между проекциями точки начала и точки конца вектора. Обычно вместо выражения скалярная проекция говорят просто – проекция . Проекция обозначается той же буквой, что и проектируемый вектор (в обычном, нежирном написании), с нижним (как правило) индексом названия оси, на которую этот вектор проектируется. Например, если на ось Х проектируется вектора, то его проекция обозначается а x . При проектировании этого же вектора на другую ось, если ось Y , его проекция будет обозначаться а y .
Например, если на ось Х проектируется вектора, то его проекция обозначается а x . При проектировании этого же вектора на другую ось, если ось Y , его проекция будет обозначаться а y .
Чтобы вычислить проекцию вектора на ось (например, ось X) надо из координаты точки его конца вычесть координату точки начала, то есть
а x = х к − x н.
Проекция вектора на ось — это число. Причем, проекция может быть положительной, если величина х к больше величины х н,
отрицательной, если величина х к меньше величины х н
и равной нулю, если х к равно х н.
Проекцию вектора на ось можно также найти, зная модуль вектора и угол, который он составляет с этой осью.
Из рисунка видно, что а x = а Cos α
То есть, проекция вектора на ось равна произведению модуля вектора на косинус угла между направлением оси и направлением вектора . Если угол острый, то
Cos α > 0 и а x > 0, а, если тупой, то косинус тупого угла отрицателен, и проекция вектора на ось тоже будет отрицательна.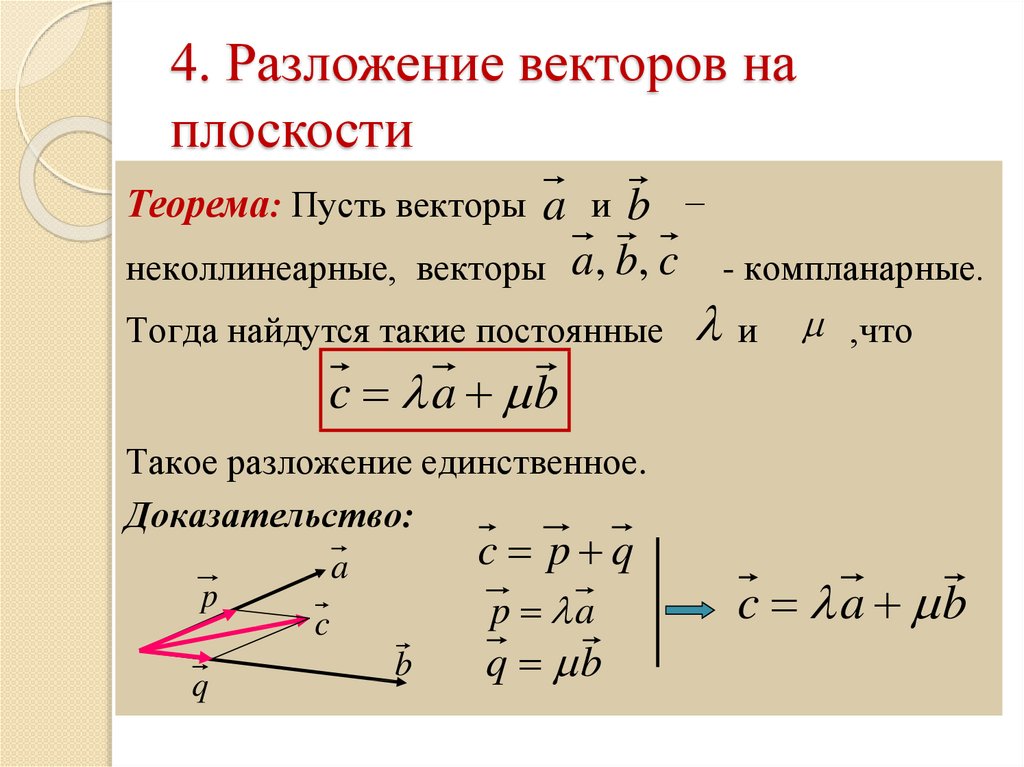
Углы, отсчитываемые от оси против хода часовой стрелки, принято считать положительными, а по ходу — отрицательными. Однако, поскольку косинус – функция четная, то есть, Cos α = Cos (− α), то при вычислении проекций углы можно отсчитывать как по ходу часовой стрелки, так и против.
Чтобы найти проекцию вектора на ось надо модуль этого вектора умножить на косинус угла между направлением оси и направлением вектора.
4. Основная формула векторной алгебры.
Спроектируемвектор а на оси Х и Y прямоугольной системы координат. Найдем векторные проекции вектора а на эти оси:
а x = а x ·i, а y = а y ·j.
Но в соответствии справилом сложения векторов
а = а x + а y .
а = а x ·i + а y ·j.
Таким образом, мы выразили вектор через его проекции и орты прямоугольной системы координат (или через его векторные проекции).
Векторные проекции а x и а y называютсясоставляющими или компонентами вектора а. Операция, которую мы выполнили, называется разложением вектора по осямпрямоугольной системы координат.
Если вектор задан в пространстве, то
а = а x ·i + а y ·j + а z ·k.
Эта формула называется основной формулой векторной алгебры. Конечно, ее можно записать и так.
Определение 1. На плоскости параллельной проекцией точки А на ось l называется точка — точка пересечения оси l с прямой, проведенной через точку А параллельно вектору, задающему направление проектирования.
Определение 2. Параллельной проекцией вектора на ось l (на вектор) называется координата вектора, относительно базиса оси l, где точки и — параллельные проекции соответственно точек А и В на ось l (рис. 1).
Согласно определению имеем
Определение 3. если и базис оси l декартов, то есть, то проекция вектора на ось l называется ортогональной (рис. 2).
В пространстве определение 2 проекции вектора на ось остается в силе, только направление проектирования задается двумя неколлинеарными векторами (рис. 3).
Из определения проекции вектора на ось вытекает, что каждая координата вектора есть проекция этого вектора на ось, определяемую соответствующим базисным вектором. При этом направление проектирования задается двумя другими базисными векторами, если проектирование ведется (рассматривается) в пространстве, или другим базисным вектором, если проектирование рассматривается на плоскости (рис. 4).
При этом направление проектирования задается двумя другими базисными векторами, если проектирование ведется (рассматривается) в пространстве, или другим базисным вектором, если проектирование рассматривается на плоскости (рис. 4).
Теорема 1. Ортогональная проекция вектора на ось l равна произведению модуля вектора на косинус угла между положительным направлением оси l и, т. е.
С другой стороны
Из находим
Подставив АС в равенство (2), получим
Так как числа x и одного знака в обоих рассматриваемых случаях ((рис. 5, а) ; (рис. 5, б) , то из равенства (4) следует
Замечание. В дальнейшем мы будем рассматривать только ортогональную проекцию вектора на ось и поэтому слово «орт» (ортогональная) в обозначении будем опускать.
Приведем ряд формул, которые используются в дальнейшем при решении задач.
а)Проекция вектора на ось.
Если, то ортогональная проекция на вектор согласно формуле (5) имеет вид
в) Расстояние от точки до плоскости.
Пусть б — данная плоскость с нормальным вектором, M — данная точка,
d — расстояние от точки М до плоскости б (рис. 6).
Если N- произвольная точка плоскости б, а и — проекции точек Mи Nна ось, то
- г) Расстояние между скрещивающимися прямыми.
Пусть а и b- данные скрещивающиеся прямые, — перпендикулярный им вектор, А и В — произвольные точки прямых а и b соответственно (рис. 7), и — проекции точек Aи Bна, тогда
д) Расстояние от точки до прямой.
Пусть l — данная прямая с направляющим вектором, M — данная точка,
N — ее проекция на прямую l , тогда — искомое расстояние (рис. 8).
Если А — произвольная точка прямой l , то в прямоугольном треугольнике MNAгипотенуза MAи катет могут быть найдены. Значит,
е) Угол между прямой и плоскостью.
Пусть — направляющий вектор данной прямой l , — нормальный вектор данной плоскости б, — проекция прямой l на плоскость б (рис. 9).
9).
Как известно, угол ц между прямой l и ее проекцией на плоскость б называется углом между прямой и плоскостью. Имеем
Приведем примеры решения метрических задач векторно-координатным методом.
По
физике
за 9 класс (И.К.Кикоин, А.К.Кикоин, 1999 год),
задача №5
к главе «ГЛАВА 1. ОБЩИЕ СВЕДЕНИЯ О ДВИЖЕНИИ ».
1. Что называют проекцией вектора на координатную ось?
1. Проекцией вектора а на координатную ось называют длину отрезка между проекциями начала и конца вектора а (перпендикулярами, опущенными из этих точек на ось) на эту координатную ось.
2. Как связан вектор перемещения тела с его координатами?
2. Проекции вектора перемещения s на оси координат равны изменению соответствующих координат тела.
3. Если координата точки с течением времени увеличивается, то какой знак имеет проекция вектора перемещения на координатную ось? А если она уменьшается?
3. Если координата точки с течением времени увеличивается, то проекция вектора перемещения на координатную ось будет положительной, т. к. в этом случае мы будем идти от проекции начала к проекции конца вектора по направлению самой оси.
к. в этом случае мы будем идти от проекции начала к проекции конца вектора по направлению самой оси.
Если координата точки с течением времени будет уменьшаться, то проекция вектора перемещения на координатную ось будет отрицательной, т.к. в этом случае мы будем идти от проекции начала к проекции конца вектора против направляющей самой оси.
4. Если вектор перемещения параллелен оси X, то чему равен модуль проекции вектора на эту ось? А модуль проекции этого же вектора на ось У?
4. Если вектор перемещения параллелен оси Х, то модуль проекции вектора на эту ось равен модулю самого вектора, а его проекция на ось Y равна нулю.
5. Определите знаки проекций на ось X векторов перемещения, изображенных на рисунке 22. Как при этих перемещениях изменяются координаты тела?
5. Во всех нижеследующих случаях координата Y тела не изменяется, а координата Х тела будет изменяться следующим образом:
a) s 1 ;
проекция вектора s 1
, на ось Х отрицательна и по модулю равна длине вектора s 1
. При таком перемещении координата Х тела уменьшится на длину вектора s 1
.
При таком перемещении координата Х тела уменьшится на длину вектора s 1
.
b) s 2 ;
проекция вектора s 2 на ось X положительна и равна по модулю длине вектора s 1 . При таком перемещении координата Х тела увеличится на длину вектора s 2 .
c) s 3 ;
проекция вектора s 3 на ось Х отрицательна и равна по модулю длине вектора s 3 . При таком перемещении координата Х тела уменьшится на длину вектора s 3 .
d) s 4 ;
проекция вектора s 4 на ось X положительна и равна по модулю длине вектора s 4 . При таком перемещении координата Х тела увеличится на длину вектора s 4 .
e) s 5 ;
проекция вектора s 5 на ось Х отрицательна и равна по модулю длине вектора s 5 . При таком перемещении координата Х тела уменьшится на длину вектора s 5 .
6. Если значение пройденного пути велико, то может ли модуль перемещения быть малым?
6. Может. Это связано с тем, что перемещение (вектор перемещения) является векторной величиной, т.е. представляет собой направленный отрезок прямой, соединяющий начальное положение тела с его последующими положениями. А конечное положение тела (вне зависимости от величины пройденного пути) может находиться как угодно близко к первоначальному положению тела. В случае совпадения конечного и начального положений тела, модуль перемещения будет равен нулю.
А конечное положение тела (вне зависимости от величины пройденного пути) может находиться как угодно близко к первоначальному положению тела. В случае совпадения конечного и начального положений тела, модуль перемещения будет равен нулю.
7. Почему в механике более важен вектор перемещения тела, чем пройденный им путь?
7. Основной задачей механики является определение положения тела в любой момент времени. Зная вектор перемещения тела мы можем определить координаты тела, т.е. положение тела в любой момент времени, а зная только пройденный путь мы не можем определить координаты тела, т.к. мы не имеем сведений о направлении движения, а можем только судить о длине пройденного пути на данный момент времени.
Алгебраическая проекция вектора на какую-либо ось равна произведению длины вектора на косинус угла между осью и вектором:
Пр a b = |b|cos(a,b) или
Где a b — скалярное произведение векторов , |a| — модуль вектора a .
Инструкция . Для нахождения проекции вектора Пp a b в онлайн режиме необходимо указать координаты векторов a и b . При этом вектор может быть задан на плоскости (две координаты) и в пространстве (три координаты). Полученное решение сохраняется в файле Word . Если векторы заданы через координаты точек, то необходимо использовать этот калькулятор .
Классификация проекций вектора
Виды проекций по определению проекция вектора
- Геометрическая проекция вектора AB на ось (вектор) называется вектор A»B» , начало которого A’ есть проекция начала A на ось (вектор), а конец B’ – проекция конца B на ту же ось.
- Алгебраическая проекция вектора AB на ось (вектор) называется длина вектора A»B» , взятая со знаком + или — , в зависимости от того, имеет ли вектор A»B» то же направление, что и ось (вектор).
Виды проекций по системе координат
Свойства проекции вектора
- Геометрическая проекция вектора есть вектор (имеет направление).
- Алгебраическая проекция вектора есть число.
Теоремы о проекциях вектора
Теорема 1 . Проекция суммы векторов на какую-либо ось равна проекции слагаемых векторов на ту же ось.
AC» =AB» +B»C»
Теорема 2 . Алгебраическая проекция вектора на какую-либо ось равна произведению длины вектора на косинус угла между осью и вектором:
Пр a b = |b|·cos(a,b)
Виды проекций вектора
- проекция на ось OX.
- проекция на ось OY.
- проекция на вектор.
| Проекция на ось OX | Проекция на ось OY | Проекция на вектор |
| Если направление вектора A’B’ совпадает с направлением оси OX, то проекция вектора A’B’ имеет положительный знак. | Если направление вектора A’B’ совпадает с направлением оси OY, то проекция вектора A’B’ имеет положительный знак. | Если направление вектора A’B’ совпадает с направлением вектора NM, то проекция вектора A’B’ имеет положительный знак. |
| Если направление вектора противоположно с направлением оси OX, то проекция вектора A’B’ имеет отрицательный знак. | Если направление вектора A’B’ противоположно с направлением оси OY, то проекция вектора A’B’ имеет отрицательный знак. | Если направление вектора A’B’ противоположно с направлением вектора NM, то проекция вектора A’B’ имеет отрицательный знак. |
| Если вектор AB параллелен оси OX, то проекция вектора A’B’ равна модулю вектора AB. | Если вектор AB параллелен оси OY, то проекция вектора A’B’ равна модулю вектора AB. | Если вектор AB параллелен вектору NM, то проекция вектора A’B’ равна модулю вектора AB. |
| Если вектор AB перпендикулярен оси OX, то проекция A’B’ равна нулю (нуль-вектор). | Если вектор AB перпендикулярен оси OY, то проекция A’B’ равна нулю (нуль-вектор). | Если вектор AB перпендикулярен вектору NM, то проекция A’B’ равна нулю (нуль-вектор). |
1. Вопрос: Может ли проекция вектора иметь отрицательный знак. Ответ: Да, проекций вектора может быть отрицательной величиной. В этом случае, вектор имеет противоположное направление (см. как направлены ось OX и вектор AB)
2. Вопрос: Может ли проекция вектора совпадать с модулем вектора. Ответ: Да, может. В этом случае, векторы параллельны (или лежат на одной прямой).
3. Вопрос: Может ли проекция вектора быть равна нулю (нуль-вектор). Ответ: Да, может. В этом случае вектор перпендикулярен соответствующей оси (вектору).
Пример 1
. Вектор (рис. 1) образует с осью OX (она задана вектором a) угол 60 о. Если OE есть единица масштаба, то |b|=4, так что .
Действительно, длина вектора (геометрической проекции b) равна 2, а направление совпадает с направлением оси OX.
Пример 2
. Вектор (рис. 2) образует с осью OX (с вектором a) угол (a,b) = 120 o . Длина |b| вектора b равна 4, поэтому пр a b=4·cos120 o = -2.
Действительно, длина вектора равна 2, а направление противоположно направлению оси.
Формула векторной проекции — GeeksforGeeks
Вектор — это двумерный объект, который имеет не только направление, но и величину. Геометрически вектор можно рассматривать как направленный отрезок линии со стрелкой, указывающей направление вектора, и длиной, равной величине вектора. От хвоста к голове — направление вектора. Два вектора одинаковы, если они имеют одинаковую величину и направление. Это означает, что если мы перенесем вектор в новую точку (не поворачивая его), полученный вектор будет таким же, как тот, с которого мы начали.
Проекция вектора
Длина тени данного вектора, отбрасываемой на другой вектор, представляет собой векторную проекцию одного вектора на другой вектор. Он рассчитывается путем умножения величины двух векторов на косеканс угла между ними. Скалярное значение является результатом формулы векторной проекции.
Формула Скалярное произведение векторов a и векторов b, деленное на величину вектора b, является формулой проекции вектора в векторной алгебре для проекции вектора an на вектор b. Результат скалярного произведения является скалярным значением, и величина вектора b также является скалярным значением. В результате модуль ответа вектора проекции и аргумент являются скалярными значениями в направлении вектора b.
Результат скалярного произведения является скалярным значением, и величина вектора b также является скалярным значением. В результате модуль ответа вектора проекции и аргумент являются скалярными значениями в направлении вектора b.
Вывод векторной проекцииПроекция вектора A на вектор B =
Примеры задачИз правого треугольника OAL, COS θ = OA
OL = OA COS θ
⇒ OL OL
OL = OA Cose
. = cos θ
OL — вектор проекции вектора a на вектор b.
Мы знаем,
OL =
Отсюда доказано.
Вопрос 1. Найдите проекцию вектора и .
Решение:
Здесь, .
Мы знаем, проекция вектора a на вектор b =
Вопрос 2. Найдите проекции вектора и .
Решение:
Здесь
Мы знаем, что проекция вектора a на вектор b =
Вопрос 3. Найдите проекцию вектора и .
Решение:
Здесь
Мы знаем, что проекция вектора a на вектор b =
\шляпа k и 8\шляпа i – 2\шляпа j + 4\шляпа k .
Решение:
Здесь
Мы знаем, что проекция вектора a на вектор b =
Вопрос 5. Найдите проекцию вектора i – 5 \hat i – 2\hat i \hat k и 4\hat i – \hat j + \hat k.
Решение:
Здесь
Мы знаем, что проекция вектора a на вектор b =
Вектор-формула | RaceDepartment
JavaScript отключен. Для лучшего опыта, пожалуйста, включите JavaScript в вашем браузере, прежде чем продолжить.
Для лучшего опыта, пожалуйста, включите JavaScript в вашем браузере, прежде чем продолжить.
Войдите или зарегистрируйтесь, чтобы загрузить этот контент
- Автор Якоман3
- Дата создания
- Теги
- навес концепт-кар формула Гран При дизайн открытые колеса одноместный турбо v8 вектор
Ознакомьтесь с новинками продукции Fanatec и предложениями здесь
Завершите 1 квалификационную гонку и получите право выиграть поездку на Гран-при Австрии F1
Обзор Обновления (2) Отзывы (57) История Обсуждение
Задайте вопрос
Отзывы (57) История
Описание
Formula Vector — это концептуальный автомобиль Гран-при, созданный с нуля как переосмысление того, каким может быть автомобиль Гран-при.
Приводимый в действие 2,3-литровым двигателем V8 с диагональю 60° и двойным наддувом мощностью 892 л. Суммарная мощность автомобиля достигает 1269 л.л.с. на короткое время.
Вместо большой и тяжелой батареи в Formula Vector используется компактный и легкий суперконденсатор, заряжаемый при движении накатом и торможении. Это также позволяет очень быстро заряжать и разряжать, придавая Formula Vector исключительное ускорение на выходе из поворотов.
Простые аэродинамические поверхности и обтекаемая форма кузова создают минимальное аэродинамическое воздействие позади автомобиля, способствуя лучшему участию в гонках.
Небольшая и легкая конструкция делает Formula Vector очень чувствительным к ударам и изменениям направления. Это, в сочетании со звуком V8, создает захватывающее впечатление как для водителя, так и для зрителя.
SR Канал Discord:
Адрес электронной почты для бизнеса: jonashdesign@aol.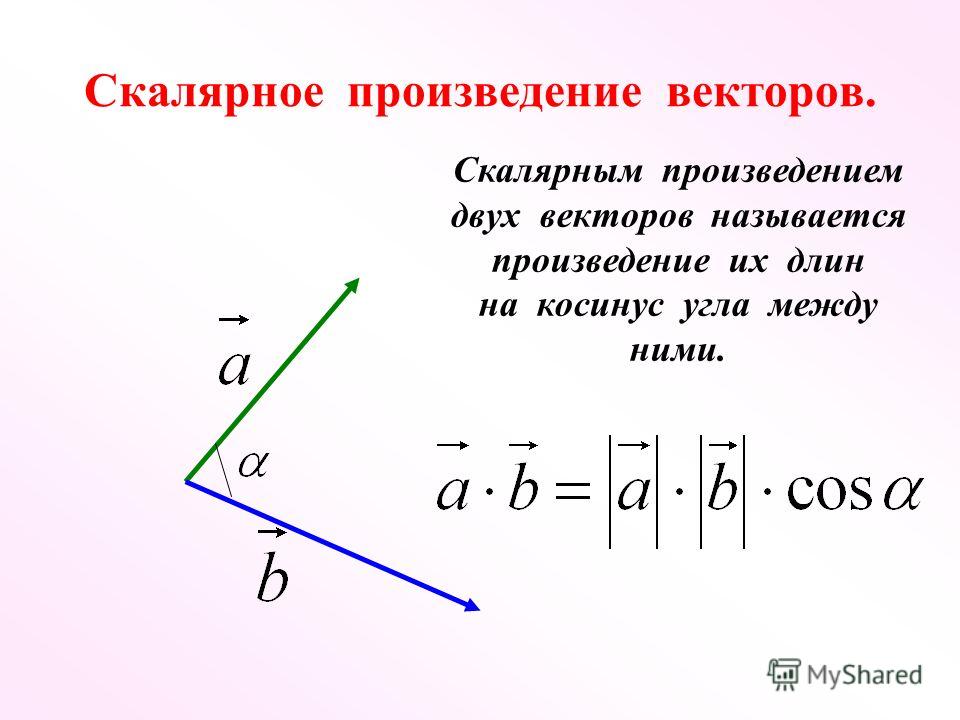 com
com
Прикрепленные файлы
Шаблон скина:
© Йонас Хольцапфель
Реакции:
M1GHTY M4VS , Але2Пассос , mlg_darksasuke_99 и еще 72— Основные улучшения ИИ (более стабильный на гоночных трассах и очень быстрых поворотах). — Скорректировано…
— Переработаны текстуры и материал шин. — Изменена текстура и материал внутреннего лобового стекла (Теперь…
- Темпокиллердж
- 5.00 звезда(ы)
- Версия: 1.1
о да!!!!
Голосовать за 0 Понизить
- je5
- 5. 00 звезда(ы)
- Версия: 1.1
 00 звезда(ы)
00 звезда(ы)Лучшее в этом моде — детали. Не только визуальные эффекты, такие как, например, приборная панель, но и физика, звук и искусственный интеллект, которые требуют времени, чтобы сделать все правильно, но часто остаются незамеченными. Получил удовольствие от вождения и рад видеть, как другие делают скины, что является настоящим знаком одобрения!
Голосовать за 0 Понизить
- бонгади
- 5.00 звезда(ы)
- Версия: 1.1
Очень наслаждаюсь этим модом, гонял его по Монце с сеткой из 20, а вчера бросил его на Малхолланд Драйв с двусторонним движением
Малхолланд Драйв с трафиком
https://youtu. be/UKC1Woobg6k
be/UKC1Woobg6k
Голосовать за 1 Понизить
- mhcbod
- 5.00 звезда(ы)
- Версия: 1.1
Отличный мод, THX
Голосовать за 0 Понизить
- Дэрил Андерсон
- 5.00 звезда(ы)
- Версия: 1.1
Любите свою работу. Машина ведет себя так, как должна выглядеть. спасибо топ работа
Upvote 0 Понизить
- этанол геймер
- 5.00 звезда(ы)
- Версия: 1.1
Пожалуйста, делайте больше машин, эта и две другие (проворная и рефлекторная) одни из лучших машин в симуляторах. У меня их не было очень давно, поэтому я борюсь с настройкой, это может быть очевидный вопрос, но по умолчанию, как вы представляли, как машины будут чувствовать себя и вести себя? Заранее спасибо и удачи.
Голосовать за 0 Понизить
- дкрКреспо
- 5.00 звезда(ы)
- Версия: 1.1
Отличный мод
Голосовать за 1 Понизить
- Деймонбосс
- 5.00 звезда(ы)
- Версия: 1.1
Мод A++ выглядит как платный мод, я также снял об этом видео https://www.youtube.com/watch?v=ANxWpOll4as
Голосовать за 1 Понизить
- Иван Пломп
- 5.00 звезда(ы)
- Версия: 1.1
Это быстро!! ААААА у меня волосы горят!!!!!!!!!!!!!!!!!!!!!!!!!! Я очень надеюсь, что вы собираетесь делать больше машин..
Голосовать за 0 Понизить
- Джереми Форд
- 5.00 звезда(ы)
- Версия: 1.1
Нравится управляемость и рывок. Фантастический! https://youtu. be/uFzzf50fIy8
be/uFzzf50fIy8
Голосовать за 0 Понизить
- летающая тарелка
- 5.00 звезда(ы)
- Версия: 1.1
Топ! Замечательный мод!
Голосовать за 1 Понизить
- Феттастик22
- 5.00 звезда(ы)
- Версия: 1.1
Мод высшего уровня, один из лучших. Серьезно захватывающий опыт вождения. Так весело управлять, FF — это высший уровень, и им действительно весело управлять.
Голосовать за 0 Понизить
- Нилок54321
- 5.00 звезда(ы)
- Версия: 1.1
Очень хороший мод! Я вижу, как F1 становится похожей на эти машины, без сомнения.
Голосовать за 3 Понизить
- Юсуф
- 5.00 звезда(ы)
- Версия: 1.1
Это, наверное, самая забавная машина, на которой я когда-либо водил, а также безумно быстрая
Голосование за 1 Понизить
- Арно10
- 5.00 звезда(ы)
- Версия: 1.1
Отличная работа!!!
Какое удовольствие водить эту машину
Спасибо 😉
Upvote 5 Понизить
- Лумпкинелла
- 5. 00 звезда(ы)
- Версия: 1.1
 00 звезда(ы)
00 звезда(ы)Вау, надеюсь, FIA делает заметки для F1. Двигатель звучит потрясающе, и, несмотря на большую скорость на поворотах, он все еще кажется сырым и не таким безжизненным, как современный болид F1. Прекрасная работа!
Голосовать за 0 Понизить
- пао
- 5.00 звезда(ы)
- Версия: 1.1
Спасибо
Голосовать за 0 Понизить
- ФЗыкму
- 5.00 звезда(ы)
- Версия: 1.1
Очень хорошая работа
Голосовать за 0 Понизить
- Стивен К. Прайс
- 5.00 звезда(ы)
- Версия: 1.1
очень нравится эта машина отличная работа
Upvote 0 Понизить
- Эдивад82
- 5.00 звезда(ы)
- Версия: 1.05
Сумасшедшая машина! Нужен отличный скин пак! Спасибо! Потрясающая работа!
Голосовать за 0 Понизить
Беспроводной руль Simucube Tahko GT-21 (черная версия)
- Гоночный отдел
- просмотров
- 3к
Первое официальное беспроводное колесо Simucube от финской компании Granite Devices. Отличный стандартный GT-руль, чтобы вы могли начать участвовать в гонках! Поставляется с колесами SQR Купить сейчас на trakracer.com за 832,00 долларов США. Tahko GT-21 Wireless Wheel, первый руль в экосистеме Simucube. Он предлагает…
Педали Fanatec ClubSport V3 перевернутые
- Гоночный отдел
- просмотров
- 7к
Максимальный реализм — вот идеология этих перевернутых педалей. Точки поворота, расположение, расстояния и общее ощущение, как в настоящей машине!
Купить сейчас на Fanatec.com за 599,95 евро
Функции
Поворотные точки тормоза и сцепления на верхней стороне, как в настоящих автомобилях
Педали высокого разрешения с. ..
..
Педали Fanatec CSL Elite V2
- Гоночный отдел
- просмотров
- 5к
Популярный набор педалей возвращается с модернизированным тормозом с тензодатчиком, датчиками Холла на дроссельной заслонке и сцеплении, а также многими усовершенствованиями конструкции. Купить сейчас на Fanatec.com за 299,95 евро И дроссельная, и тормозная оси используют прецизионные датчики Холла. Измеряя положение педали с помощью магнитов,…
Рулевое колесо Fanatec Podium Fanatec GT World Challenge
- Гоночный отдел
- просмотров
- 7к
Модульные компоненты из линейки Podium объединяются для создания высокоэффективного рулевого колеса, как в серии Fanatec Esports GT Pro 2021 года. Купить сейчас на Fanatec.com за 629,95 евро Функции Обод колеса ClubSport 320 Трехспицевый алюминиевый диск диаметром 320 мм. Подлинная…
Simucube 2 Ultimate
- Гоночный отдел
- просмотров
- 7к
Наилучшая колесная база с прямым приводом, разработанная для профессиональных гонщиков, гоночных команд и водителей гоночных автомобилей, обладает крутящим моментом 32 Нм, а максимальная скорость отклика крутящего момента находится в вашем распоряжении в любое время и в любом месте.
Купить сейчас на trakracer.