
ТАР тесты
Общие вопросы.
№1
Объекты управления делятся на устойчивые, нейтральные, неустойчивые в зависимости от:
1. Их поведения при возникновении возмущений.
2. Вида входного сигнала.
*3. Их поведения после прекращения действия возмущения.
4. Вида их реакции на входной сигнал.
№2
Система автоматического управления включает в себя:
1. Объект управления и измерительный элемент.
*2. Объект управления и управляющее устройство.
3. Управляющее устройство и органы воздействия на объект управления.
4. Объект управления и усилительный элемент.
№3
1.Измерения возмущающего воздействия и выработки регулирующего воздействия для его компенсации.
2. Измерения задающего воздействия и выработки на его основе регулирующего воздействия.
*3. Устранения отклонения управляемой величины от задающей.
4. Измерения задающего и возмущающего воздействий и выработки с учетом этих измерений регулирующего воздействия.
№4
В системах с управлением по возмущению управляющее устройство решает задачу:
1.Измерения возмущающего воздействия и выработки регулирующего воздействия для его компенсации.
2. Измерения задающего воздействия и выработки на его основе регулирующего воздействия.
3. Устранения отклонения управляемой величины от задающей.
*4. Измерения задающего и возмущающего воздействий и выработки с учетом этих измерений регулирующего воздействия.
№5
Функциональная схема САУ характеризует:
Функции отдельных элементов системы с учетом их физической природы.
Функции отдельных элементов системы вне зависимости от их конкретной реализации.*
Последовательность соединения отдельных частей системы и их математическое описание.
Последовательность соединения отдельных частей системы и их конкретную реализацию.
№6
Какое из перечисленных ниже устройств не входит в функциональную схему линейной САУ:
1. Измерительное устройство.
2. Усилительное устройство.
*3. Кодирующее устройство
4. Сравнивающее устройство.
№7
Какое из перечисленных ниже устройств предназначено для установления требуемого значения управляемой величины:
1. Измерительное устройство.
2. Усилительное устройство.
*3. Задающее устройство.
4. Сравнивающее устройство.
№8
Какое из перечисленных ниже устройств предназначено для выработки воздействия, прикладываемого к регулирующему органу объекта управления
1. Измерительное устройство.
2. Усилительное устройство.
*3. Исполнительное устройство.
4. Сравнивающее устройство.
№9
Какое из перечисленных ниже устройств предназначено для изменения свойств САУ в нужном проектировщику направлении
1. Измерительное устройство.
*2. Корректирующее устройство.
3. Исполнительное устройство.
4. Сравнивающее устройство.
№10
Выделить воздействие, не входящее в число типовых при исследовании САУ :
1.
2.
3.
*4.
№11
На какие две группы в зависимости от причин возникновения можно разделить возмущающие воздействия:
1. Постоянные и переменные
*2. Нагрузку и помехи
3. Гармонические и негармонические
4. Приложенные к входу объекта управления и к регулятору.
№12
В статической по отношению к задающему воздействию системе:
1. Выходной сигнал является постоянной величиной
2. Входной сигнал является постоянной величиной.
3. Установившееся отклонение регулируемой величины от требуемого значения
*4. Установившееся отклонение регулируемой величины от требуемого значения
.
№13
В астатической по отношению к задающему воздействию системе:
1. Выходной сигнал является постоянной величиной
2. Входной сигнал является постоянной величиной.
*3. Установившееся отклонение регулируемой величины от требуемого значения
4. Установившееся отклонение регулируемой величины от требуемого значения
.
№14
При каких условиях линейная стационарная система будет астатической по отношению к входному сигналу :
*1. Если передаточная функция разомкнутой системы не имеет нулевых полюсов.
2. Если передаточная функция разомкнутой системы имеет один нулевой полюс первого порядка.3. Если передаточная функция разомкнутой системы имеет один нулевой полюс второго порядка.
4. Таких условий нет – система не может быть астатической по отношению к данному сигналу.
№15
Перерегулирование определяется формулой:
*1. .
2.  .
.
3. .
4.  .
.
№16
Системы делятся на системы стабилизации, программного регулирования, зависимого управления в зависимости от:
1. Числа регулируемых величин.
2. Установившегося значения сигнала ошибки.
3. Числа обратных связей в системе.
*4. Информации о задающем воздействии.
№17
Системы делятся на статические и астатические в зависимости от:
1. Числа регулируемых величин.
*2. Установившегося значения сигнала ошибки.
3. Числа обратных связей в системе.
4. Информации о задающем воздействии.
№18
Системы делятся на одномерные и многомерные в зависимости от:
*1. Числа регулируемых величин.
2. Установившегося значения сигнала ошибки.
3. Числа обратных связей в системе.
4. Информации о задающем воздействии.
№19
Время
регулирования 
*1.
 .
2.
.
2.
 .
3.
.4..
.
3.
.4..
№20
Из перечисленных ниже зависимостей исключите функцию, не входящую в число типовых входных воздействий для САУ:
1. . 2.. 3.. *4..
№21
Если линейная
система является астатической по
отношению к линейно нарастающему
входному сигналу  ,
то она будет также астатической по
отношению к входному сигналу вида:
,
то она будет также астатической по
отношению к входному сигналу вида:
1.
.
*2. .3..
.3..
4. .
№22
Если линейная
система является астатической по
отношению к линейно нарастающему
входному сигналу  ,
то она будет также астатической по
отношению к входному сигналу вида:
,
то она будет также астатической по
отношению к входному сигналу вида:
1.  .
.
*2.  .
.
3. .
4.  .
.
studfiles.net
Тест с ответами на тему Теория оптимального управления
1 Общая задача оптимального управления.
А. Оптимизация управления динамическими системами и процессами.+
Б. Управление информационными системами.
В. Оптимизация разработки компьютерных программ.
Г. Анализ устойчивости систем автоматического управления.
2 Формулировка проблемы оптимального управления.
А. Разработка математических моделей динамических систем.
Б. Анализ устойчивости систем автоматического управления.
В. Оптимизация разработки компьютерных программ.
Г. Содержит критерий оптимальности (функционал), математическую модель процесса управления и ограничения на эволюцию траектории системы и ресурсы управления. +
3 Основные математические методы теории оптимальных процессов.
А. Линейная алгебра.
Б. Операционное исчисление
В. Принцип максимума Понтрягина, динамическое программирование Беллмана, математическое программирования
Г. Преобразование Фурье.
4 Необходимые условия оптимальности управления.
А. Условия существования оптимального решения.
Б. Условия, которых достаточно для определения оптимального решения.
В. Условия определения оптимального решения.
Г. Условия, при которых определяется определенная множество решений, яки могут содержит оптимальное.+
5 Достаточно условия оптимальности управления.
А. Условия существования решения проблемы оптимизации.
Б. Условия существования локального экстремума функционала.
В. Условия, яки определяют глобальный экстремум качества функционирования системы (процесса) управления.+
Г. Условия, которые обеспечивают нахождения допустимого управления.
6 Существование оптимального управления.
А. Оптимальное решение всегда существует, но не является единственным.
Б. Оптимальное решение существует не всегда.+
В. Оптимальное решение всегда существует и является единственным.
Г. Оптимальное решение всегда существует.
7 Задача использования методов оптимального управления в теории автоматического управления динамическими системами.
А. Анализ управляемости систем автоматического управления.
Б. Анализ устойчивости систем автоматического управления.
В. Анализ точности систем автоматического управления.
Г. Построение оптимального закона управления системами автоматического управления. +
8 Разомкнутые системы управления
А. Системы управления с обратной связью.
Б. Системы программного управления.+
В. Любой яки оптимальные системы.
Г. Любой яки неоптимальные системы.
9 Сомкнутые системы управления
А. Любой яки системы управления
Б. Системы с программным управлением
В. Нелинейные системы управления
Г. Системы с обратной связью +
10 Стохастические системы управления.
А. Системы управления, параметры или сигналы в которых есть случайными.+
Б. Линейные системы.
В. Оптимальные системы.
Г. Нелинейные системы.
11 Математическая модель линейной динамической системы управления.
А. dx / dt = Ax + Bu.+
Б. dx / dt = f (x, u, t).
В. dx / dt = f (x, u, t).
Г. dx / dt = xTx + uTu.
12 Математическая модель нелинейной динамической системы управления.
А. dx / dt = f (x, u, t) .+
Б. dx / dt = Ax (t) + Bu (t).
В. dx / dt = Ax (t) + Bu (t) + W (t).
Г. dx / dt = A (t) x (t) + B (t) u (t).
13 Стационарная система.
А. Система, параметры которой зависят от времени
Б. Система, параметры которой не зависят от времени+
В. Любая линейная система.
Г. Любая нелинейная система.
14 Нестационарная система.
А. Система, параметры которой зависят от времени+
Б. Система, параметры которой не зависят от времени
В. Любая линейная система.
Г. Любая нелинейная система.
15 Цифровые системы управления.
А. Системы программного управления.
Б. Сомкнутые системы управления.
В. Аналоговые системы управления.
Г. Системы управления с цифровым регулятором+
16.Математична модель объекта управления.
А. Математическое описание реального объекта, адекватной задачи, которая анализируется.+
Б. Вес объекта.
В. Габариты объекта.
Г. Драгоценность объекта
17.Зминни состояния управляемого процесса, системы.
А. Совокупность координат, яки однозначно определяют текущее состояние системы. +
Б. Координаты вектора скорости объекта.
В. Координаты вектора положения объекта.
Г. Координаты вектора ускорения объекта.
18. Метод пространства состояния.
А. Метод, в котором математическая модель дана в виде системы дифференциальных уравнений первого порядка (в форме Коши) .+
Б. Метод, в котором математическая модель дана в виде дифференциальног
В. Метод исследования устойчивости динамических систем.
Г. Метод анализа переходного процесса системы управления.
19. Траектория движения системы.
А. Ускорение объекта.
Б. Эволюция координат, яки характеризуют вектор состояния системи.+
В. Скорость объекта.
Г. Вектор состояния системы в текущий момент.
20.Допустима траектория движения системы
А. Траектория, параметры движения которой находятся в допустимой области в любой момент.+
Б. Любая траектория.
В. Только оптимальная траектория.
Г. Любая оптимальная траектория.
21.Оптимальна траектория системы управления.
А. Допустимая траектория, которая соответствует оптимальному закона управления +
Б. Любая траектория.
В. Любая допустимая траектория.
Г. Траектория при терминальном управлении
22. Закон управления.
А. Траектория движения системы.
Б. Функция управления, аргументом которой является время или вектор состояния системы.+
В. Любая функция управления системой
Г. Допустимая траектория движения системы.
23. Допустимое управления.
А. Закон управления, на интервале управления соответствует заданным ограничением.+
Б. Любое управление.
В. Только оптимальное управление.
Г. Только программное управление.
24. Оптимальный закон управления.
А. Любое управления.
Б. Только программное управление.
В. Допустимый закон управления, которому соответствует оптимальный показатель качества.+
Г. Любое допустимое управление.
25.Оптимальна программа управления.
А. Оптимальной закон управления разомкнутой системе, который соответствует фиксированному начальном вектора состояния системы и является функцией времени.
Б. Закон, который учитывает текущее состояние системы.
В. Оптимальный закон управления сомкнутой системой.+
Г. Любая допустимая программа управления.
testdoc.ru
Итоговый тест по дисциплине «Теория автоматического управления» (Тест состоит из 217 вопросов, разделенных на четыре группы)
Тест по дисциплине ТАУ
Раздел 1
1) Система – это
а) предмет или процесс подлежащий изучению;
б) совокупность элементов и устройств, находящихся в отношениях и связях между собой и образующих определенную целостность, единство;
в) любое техническое устройство, которое может работать самостоятельно, без постоянного вмешательства человека;
г) схему, изображающую последовательность процессов внутри устройства или системы;
(Ф1 – ЗСр)
2) Система автоматического управления – это
а)совокупность объекта управления и управляющего устройства, взаимодействие которых приводит к выполнению поставленной цели ;
б) совокупность элементов и устройств, находящихся в отношениях и связях между собой и образующих определенную целостность, единство;
в) любое техническое устройство, которое может работать самостоятельно, без постоянного вмешательства человека;
г) схему, изображающую последовательность процессов внутри устройства или системы;
(Ф1 – ЗСр)
3) Свойства системы – это
а) процесс организации такого целенаправленного воздействия на объект, в результате которого объект переходит в требуемое (целевое) состояние;
б) совокупность элементов и устройств, находящихся в отношениях и связях между собой и образующих определенную целостность, единство;
в) качества позволяющие описывать систему и выделять ее среди других систем;
г) схему, изображающую последовательность процессов внутри устройства или системы;
(Ф1 – ЗСр)
4) Чем характеризуются свойства системы
а) процессом организации такого целенаправленного воздействия на объект, в результате которого объект переходит в требуемое (целевое) состояние;
б) совокупностью элементов и устройств, находящихся в отношениях и связях между собой и образующих определенную целостность, единство;
в) совокупностью параметров одни, из которых могут иметь количественную меру, другие выражаться лишь качественно;
(Ф1 – ЗСр)
5) Свойства системы проявляются в результате взаимодействия
а) с техническим устройством;
б) с внешней средой;
в) с производственных коллективом;
г) технологическим процессом;
(Ф1 – ЗСр)
6) Объект управления это
а) целенаправленные процессы, выполняемые человеком для удовлетворения различных потребностей представляющих собой организованную совокупность действий;
б) части производственного процесса представляющие собой последовательность целенаправленных действий по получению из исходных материалов конечного продукта с требуемыми свойствами;
в) производственный, технологический процесс или технический объект, участвующий в определенном взаимодействии с другими объектами или процессами, нуждающийся в специальном организованном управляющем воздействии;
г) совокупностью элементов и устройств, находящихся в отношениях и связях между собой и образующих определенную целостность, единство;
(Ф1 – ЗСр)
7) Управляемая величина – это
а) величина, характеризующая процесс, протекающий в управляемом объекте, у которой необходимо поддерживать постоянное значение или измененить по заданному закону;
б) значение управляемого параметра, которое согласно заданию должно быть в данный момент времени;
в) параметр производственного, технологического процесса или технического объекта, который необходимо поддерживать постоянным или изменять по определенному закону;
(Ф1 – ЗСр)
8) Управление – это
а) процесс совершенствования производства, характеризуемый прежде всего уменьшением потока информации от человека к машине и повышением самостоятельности различных уровней и звеньев управления;
б) процесс организации такого целенаправленного воздействия на объект, в результате которого объект переходит в требуемое (целевое) состояние;
в) процесс полной или частичной замены операторов машинами и механизмами в рабочих операциях, выполняемых вручную;
г) целенаправленные процессы, выполняемые человеком для удовлетворения различных потребностей представляющих собой организованную совокупность действий;
(Ф1 – ЗСр)
9) Устройство управления – это
а) техническое устройство, которое может работать самостоятельно, без постоянного вмешательства человека;
б) совокупность элементов и устройств, находящихся в отношениях и связях между собой и образующих определенную целостность, единство ;
в) комплекс устройств, присоединенных к объекту управления и обеспечивающих автоматическое поддержание заданного значения его управляемой величины или автоматическое изменению последней по определенному закону;
г) независимый обрабатывающий комплекс, управляемый с помощью ЭВМ без участия человека;
(Ф1 – ЗСр)
10) Из каких элементов состоит САУ?
а) объекта управления и управляющего устройства;
б) объекта управления, вычислительного устройства, задающего устройства, блока настройки параметров измерительного устройства;
в) объекта управления, измерительного устройства, задающего устройства, сравнивающего устройства, усилителя и исполнительного механизма;
г) верны все выше перечисленные вопросы;
(Ф1 – ЗСр)
11) Для чего в САУ предназначено задающее устройство?
а) для установления необходимого значения управляемой величины и преобразования управляемой величины в величину удобную для преобразования или использования;
vunivere.ru
Ответы по ТАУ [DOC] — Все для студента
Ответы по ТАУ [DOC] — Все для студента- Добавлен пользователем Deemaric, дата добавления неизвестна
- Отредактирован

Теория управления. Предмет изучения и задачи.
Классификация систем управления.
Уравнения динамики системы автоматического управления. Передаточная функция.
Виды соединений.
Структурные преобразования.
Типовые входные воздействия и реакции на них.
АФЧХ, АЧХ и ФЧХ. Комплексная плоскость для построения годографа.
характеристик.
ЛАЧХ и ЛФЧХ. Система координат для построения логарифмических.
Методы построения ЛАЧХ и ЛФЧХ.
Типовые динамические звенья.
Идеальное усилительное (безынерционное).
Апериодическое (инерционное).
Апериодическое (инерционное).
второго порядка.
Колебательное.
Интегрирующее.
идеальное.
Интегрирующее.
инерционное.
Изодромное.
Изодромное.
второго порядка.
Дифференцирующее (ид. ).
Дифференцирующее.
инерционное.
Форсирующее.
Понятие устойчивости. Необходимые и достаточные условия устойчивости.
Алгебраический критерий устойчивости РАУСА.
Алгебраический критерий устойчивости ГУРВИЦА.
Критерий устойчивости Михайлова.
Критерий устойчивости Найквиста.
Запас устойчивости. Определение запаса устойчивости по ЛАЧХ и ЛФЧХ.
Основные показатели качества процесса регулирования.
Ошибки регулирования.
Методы повышения точности САР.
Виды корректирующих устройств.
- Чтобы скачать этот файл зарегистрируйтесь и/или войдите на сайт используя форму сверху.
- Регистрация
www.twirpx.com
Тесты по ТАУ
Тестовые задания по дисциплине
«Теория автоматического управления»
1.Чтобы система была статической коэффициент, аn разомкнутой системы не должен быть равен:
А -1
Б 0
В 1
2. … — совокупность воздействий, выработанных на основании полученной информации и направленных на поддержание или улучшение объекта в соответствии с заданием:
А регулирование
Б объект
В управление
3.Определение координат вектора Е(t) осуществляется с помощью …:
А командного блока
Б элемент сравнения
В регулятора
4. Передаточные функции простейших звеньев имеет вид :
А K, K*S, K/S
Б W, W(p)
В R(ω)
5. На рисунке приведен годограф астатических систем. Показать кривую, соответствующую неустойчивой системе (согласно критерию Найквиста):
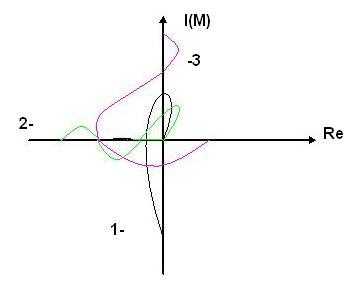
А 1
Б 2
В 3
6. Число колебаний (перерегулирование) определяется как число минимумов кривой переходных процессов в интервале Тр или число, колебаний которое вычисляется по формуле…
А ω=2п/т
Б W(p)= i* ω
В W(p)= k/p
7. Можно ли переносить сумматор через звено?
А можно
Б нет, так как может возникнуть ошибка
В нельзя
8. как называется такое соединение?
А последовательное
Б параллельное
В соединение с обратной связью
9. Структурное звено изображается в виде …с указанием входных и выходных величин, передаточных функций.
А квадрата
Б треугольника
В прямоугольника
10. Системы управления, способные изменять в процессе функционирования … управления, приспосабливаясь таким образом к изменяющимся условиям работы, называется адаптивными.
А алгоритм
Б функций
В объекта
11. При параллельном соединении передаточные функции отдельных звеньев …
А складываются
Б умножаются
В делятся
12. Система называется многоконтурной, если при её … получается цепь, содержащая параллельные и обратные связи.
А замыкании
Б размыкании
В отрицании
13. Многоконтурные системы имеют перекрывающие связи, если контур параллельной и обратной связи охватывает участок …, содержащей начало или конец другой обратной или параллельной связи.
А цепи
Б сумматора
В контура
14. Какой элемент необходимо ввести при переносе узла через сумматор?
А никакой
Б суммирующий или сравнивающий
В перенос узла через сумматор недопустим
15. Положение равновесия называется устойчивым в целом, если оно устойчиво при…
А tне больше 1
Б любых возмущениях
В t=const
16. Если начальные условия движений координаты находятся в круге с радиусом δ, то как бы траектория движение не изменялась, она …
А никогда не выйдет за пределы радиуса δ
Б должна выходит за радиус δ
В постоянно находится в одном положении
17. Когда числитель приравнивается к нулю в передаточной функции, то получаем корень, а если знаменатель приравниваем к нулю, то получаем …
А вектор
Б полюс
В сумматор
18. Управление — совокупность воздействий, выработанных на основании полученной … и направленных на поддержание или улучшение объекта в соответствии с заданием.
А информации
Б оценки
В статистики
19. При проектировании САУ рекомендуется выбирать Δφ≥ …,что соответствует примерно второму запасу устойчивости по фазе.
А 10
Б 20
В 30
20. При колебательном процессе производная меняет свой знак …
А 1 раз
Б 2 раза
В несколько раз
21. Какая система показана на рисунке?
А устойчивая
Б на границе устойчивости
В неустойчивая
22.Показатель колебательности М имеет вид
А М=
Б М=
В М=
23. Запас по фазе получается как луч, соединяющий точку пересечения годографа с единичным вектором, исходящего из начало координат, имеет вид:
А
Б
В
24. Полоса пропускания не должна быть как большой так и …
А равной 1
Б неравной -2
В малой
25.Система управления по возмущению называется разомкнутой, так как у неё отсутствует передача … с выхода.
А информации
Б регулятора
В канала связи
26. … — технологическое оборудование, в котором регулируется параметр или несколько параметров:
А объект регулирования
Б управление
В регулирование
27 … — автоматическое устройство, при помощи которого регулируется параметр
А объект регулирования
Б АСР
В автоматическим регулятором
28 …-некоторые совокупности элементов устройств, находящихся в отношении и связях между собой и образующих определенную целостность:
А АСР
Б задача
В системы
29 Как называется система, в которой при приложенных возмущающихся воздействиях, ошибка ε→0
А линейная система
Б статическая система
В астатическая система
30 Техническое устройство, выполняющее функции управления без участия человека называется — …
А контроллером
Б аппаратом
В компьютером
31 Какой буквой обозначаются выходные величина?
А х(t)
Б y(t)
В z(t)
32 Какой буквой обозначается вектор состояния?
А х(t)
Б y(t)
В z(t)
33 Достоинством разомкнутых систем является?
А высокое быстродействие
Б малое количество ошибок
В уникальность
34 … — система, содержащая хотя бы один элемент дискретного действия, у которого выходной сигнал уменьшается дискретно, т.е. скачками.
А система дискретна
Б система стабильна
В система замкнута
35 САР называется …, если непрерывное изменение входной величины соответствует выходной величине в виде импульсов.
А импульсной
Б непрерывной
В замкнутой
36. Расшифровать САУ
А система автоматического управления
Б система автоматизированного управления
В система автомеханического управления
37 Выражение для частотной характеристики?
А х=хмsin( t+
t+ )
)
Б х=хмcos( t+
t+ )
)
В х=хsin( t+
t+ )
)
38. Какие характеристики получаются, когда на вход системы подают гармонический сигнал в виде синуса или косинуса.
А статические
Б параллельные
В частотные
39. Если сумматор переносится против входа сигнала, то необходимо добавить … с передаточной функцией W-1
А сумматор
Б регулятор
В звено
40 …- это значение S, при которых передаточная функцияW(S) обращается в нуль.
А звено
Б корни
В регулятор
41. …- это такое значение S, при которыхW(S) обращается в ∞
А звено
Б корни
В полюса
42 Как обозначается суммирующий элемент?
А
Б
В
43 Система называется …, если при ее размыкании получается цепь, содержащая параллельные и обратные связи:
А многофункциональной
Б многогранной
В многоконтурной
44 Формула частоты колебаний?
А 
Б 
В 
45 Формула запаса устойчивости по фазе?
А
Б
В
46 Формула степени затухания?
А 
Б 
В 
47 Как обозначается запас по амплитуде?
А ∆L
Б ∆W
В ∆Е
48. Передаточная функция апериодического звена 1-го порядка:
А 
Б 
В
49. Что такое АСУ?
А автоматизированная система управления
Б автоматическая система управления
В автомеханическая система управления
Частный случай управления, направленный на поддержание параметров ТП в заданных пределах или изменяющихся по заданному закону, называется:
А управление
Б регулирование
В устойчивость
… — неделимая часть системы.
А элемент
Б система
В объект управления
… — описание системы линейными дифференциальными уравнениями.
А линеаризация
Б линейность
В математическое описание
… — способность системы возвращаться в исходное положение после прекращения малых возмущающих воздействий.
А перерегулирование
Б устойчивость
В степень затухания
По критерию Найквиста замкнутая система будет устойчива, если годограф … системы не охватывает точку с координатами (-1;i0) при изменение ω от 0 до ∞.
А разомкнутой
Б замкнутой
В линейной
Системы, которые некоторым образом приспосабливают свои динамические и статические свойства к изменению условий работы системы, называются:
А адаптивными
Б линейными
В устойчивыми
… система отличается наличием человеческого фактора.
А автоматизированная
Б автоматическая
В автомеханическая
… — некоторая совокупность элементов.
А система
Б объект управления
В объект регулирования
Интервал времени от начала переходного процесса до момента, когда отклонение выходной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины, называется:
А время регулирования
Б степень затухания
В перерегулирование
Отношение разности приращений относительно установившегося значения двух соседних однонаправленных амплитуд одного знака к большей из них называется:
А степенью затухания
Б перерегулированием
В временем регулирования
Инвариантность — …
А независимость
Б линейность
В нелинейность
… случайным процессом называется такой процесс, вероятностные (стохастические) характеристики которого не зависят от времени
А стационарным
Б статическим
В детерминированным
Устойчивость в малом – устойчивость при бесконечно … отклонениях от исходного режима.
А больших
Б малых
В линейных
Устойчивость в большом — устойчивость при … отклонениях возможных в системе по условиям ее работы.
А бесконечных
Б конечных
В больших
К алгебраическим критериям относится критерий:
А Найквиста
Б Михайлова
В Раусса-Гурвица
К частотным критериям не относится критерий:
А Найквиста
Б Михайлова
В Раусса-Гурвица
… устойчивость – задание нелинейностей не конкретных характеристик, а в более общем виде с точностью только до определенного ее класса.
А абсолютная
Б относительная
В средняя
Метод гармонической линеаризации основан на предположении, что колебания, на входе нелинейного звена являются …
А синусоидальными
Б косинусоидальными
В линейными
По критерию Найквиста замкнутая система будет устойчива, если … разомкнутой системы не охватывает точку с координатами (-1;i0) при изменение ω от 0 до ∞.
А ЛАХ
Б годограф
В переходная функция
… — способность системы возвращаться в исходное положение после прекращения малых возмущающих воздействий.
А устойчивость
Б приспосабливаемость
В стабильность
По критерию Найквиста замкнутая система будет устойчива, если годограф системы не охватывает точку с координатами … при изменении ω от 0 до ∞.
А (-1;i0)
Б (-1;1)
В (i0;-1)
Степень затухания — отношение … приращений относительно установившегося значения двух соседних однонаправленных амплитуд одного знака к большей из них.
А суммы
Б разности
В отношения
… — частный случай управления, направленный на поддержание параметров ТП в заданных пределах или изменение их по заданному закону.
А регулирование
Б перерегулирование
В стабилизация
… в большом — при конечных отклонениях, возможных в данной системе по условиям ее работы.
А перерегулирование
Б устойчивость
В степень затухания
… пространство в прямоугольной системе координат Хi, которыми являются величины, определяющие состояние системы.
А линейное
Б нелинейное
В фазовое
Стационарным случайным процессом называется такой процесс, вероятностные (…) характеристики которого не зависят от времени
А стохастические
Б стационарные
В детерминированным
…- технологическое оборудования, в котором регулируется параметр или несколько параметров.
А объект управления
Б объект регулирования
В объект
studfiles.net
Тесты [Архив] — Страница 3
Форум студентов МТИ > Основной раздел > ТестыPDA
Просмотр полной версии : Тесты
Страницы : 1 2 [3] 4 5
- Курс: Бережливое производство
- Биология
- Экономика 2015
- Системы контроля и управления доступом
- ДИНАМИКА СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК.
- Программирование и основы алгоритмизации
- БИОХИМИЯ!! Помогите пожалуйста решить тест
- Управление инновационными проектами
- ИГА-ПГС
- Вычислительные системы — нужные ответы!
- Основы безопасности жизнедеятельности (общеобразовательный)
- основы безопасности жизнедеятельности колледж
- Литература колледж
- физическая культура
- теоретическая механика
- Методы принятия управленческих решений
- Современные аспекты налогового права
- БАНКОВСКАЯ СИСТЕМА
- КОРПОРАТИВНЫЕ ИНФОРМАЦИОННЫЕ СИСТЕМЫ
- Ответы ИГА Информатика и вычислительная техника «Сети ЭВМ и телекоммуникации»
- НАДЕЖНОСТЬ СИСТЕМ ЭНЕРГООБЕСПЕЧЕНИЯ ПРЕДПРИЯТИЙ
- ТЕХНОЛОГИЧЕСКИЕ ЭНЕРГОНОСИТЕЛИ ПРЕДПРИЯТИЙ
- Вопросы ГИА (госэкзамены) Безопасность и защита информации
- Естествознание колледж
- УЧЕБНЫЙ КУРС «ПРОГРАММИРОВАНИЕ И ОСНОВЫ АЛГОРИТМИЗАЦИИ
- МЕЖДУНАРОДНЫЕ ОТНОШЕНИЯ
- Теплотехника
- Тесты на выяжлении автокорреляции в EViews
- Менеджмент профессиональных коммуникаций
- ИТОГОВОЕ ТЕСТИРОВАНИЕ — Физическая и коллоидная химия
- Аналитическая химия + итоговые
- Основы риелторской деятельности
- Тест по химии
- Являются ли действия преступными
- Управление финансовыми рисками и страхование рисков
- Организация бухгалтерского учета в банках
- Система гос-го и муниципального управления
- Философия
- ХИМИЯ SOS!!!!!!!
- Информационные системы в логистике
- МИКРОПРОЦЕССОРНЫЕ СИСТЕМЫ И ПАРАЛЛЕЛЬНОЕ ПРОГРАММИРОВАНИЕ
- Биология 2015
- ВНЕШНЕЭКОНОМИЧЕСКАЯ ДЕЯТЕЛЬНОСТЬ ПРЕДПРИЯТИЯ
- Учебная практика
- Срочно! ВКР
- КУРСОВАЯ по МИКРОЭКОНОМИКЕ
- Как проходит пересдача итогового теста?
- Исследование операций и методы оптимизации — 5 раздел
- Бухгалтерская (финансовая) отчётность
- Помогите определиться с профессией!
- ПРАВО!!!!!!!!!
- «ЭЛЕМЕНТЫ МАТЕМАТИЧЕСКОЙ ЛОГИКИ (СПО)»
- ОСНОВЫ РЕКЛАМЫ
- Транспорная логистика
- Транспортировка автомобилем в 82 кубометра из города Новосибирск в город Минск
- Финансовая математика СПО
- Гегография (СПО)
- геополитика, 1, 2, 3 модули
- ФИНАНСОВЫЙ И УПРАВЛЕНЧЕСКИЙ УЧЕТ
- УЧЕБНЫЙ КУРС «ЭЛЕМЕНТЫ ВЫСШЕЙ МАТЕМАТИКИ (СПО)»
- Основы гидравлики и теплотехники
- Управление техносферной безопасностью
- Автоматические ответы на тесты
- Проектирование товаров и услуг
- Управление государственной и муниципальной собственностью
- МОЛНИЕЗАЩИТА
- Экономика государственной и муниципальной собственности
- Отправка автомобилем в 82 кубометра из города Циндао в город Берлин
- Как называются жесты, сигнализирующие об отношении говорящего к аудитори
- Предсказывание случайных чисел
- менеджмент
- ЭКОНОМИКА И УПРАВЛЕНИЕ ПРОИЗВОДСТВОМ
- Экономические работы от автора! Не переплачивайте агентствам!
- Основы мультимедиа и компьютерной графики
- ребята нашла человека который пишет конкретно курсовые работы
- Диссертация
- ИСТОЧНИКИ И СИСТЕМЫ ТЕПЛОСНАБЖЕНИЯ ПРЕДПРИЯТИЙ
- Методология проектирования промышленных изделий
- ПРАВОВОЕ ОБЕСПЕЧЕНИЕ УПРАВЛЕНИЯ ГОСУДАРСТВЕННОЙ И МУНИЦИПАЛЬНОЙ СОБСТВЕННОСТЬЮ
- НАЛОГОВЫЕ СИСТЕМЫ ЗАРУБЕЖНЫХ СТРАН
- Системы автоматического регулирования
- Тестирование. Раздел 2 «МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ АВТОМАТИЧЕСКИХ СИСТЕМ»
- ребят кто знает ответы к этим тестам
- Модели управления собственностью в мировой экономике
- [B]Модели управления собственностью в мировой экономике[/B]нужна помощь
- Методология познавательной деятельности
- Элементы математической логики
- Курсовые работы
- Помогите с Общей Химией(не могу не где найти)
- промышленная токсикология
- ТЕХНИЧЕСКАЯ ЭКСПЕРТИЗА ОБЪЕКТОВ НЕДВИЖИМОСТИ
- Аттестация рабочих мест по условиям труда
- ПРАВО СПО I семестр
- Экология СПО
- Страхование
- экономика колледж
- русский язык колледж
- английский язык колледж
- Строительные машины
- Нужна курсовая по Микроэкономике
- Статистика Спо Итоговый
- Защита Февраль 2016
- Модели управления собственностью в мировой экономике
- Обоюдная помощь
- Защита интеллектуальной собственности
- Дополнительные главы математики.
- ИГА_Строительство_ПГС
- Бухгалтерский учёт и анализ
- Нет ответов на тесты
- МОТИВАЦИЯ ПЕРСОНАЛА
- Экономика труда
- Основы философии
- ЗЕМЕЛЬНЫЙ КАДАСТР
- Учебный план
- ИГА Безопасность труда
- История России
- КУЛЬТУРА РЕЧИ И ДЕЛОВОЕ ОБЩЕНИЕ
- Помощь по всем предметам
- Социальная психология
- Управление рисками
- Технологическое предпринимательство
- АРХИТЕКТУРА ЭВМ И ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМ
- матлогика
- ИГА
- Техническое оснащение торговых организаций и охрана труда
- химия воды
- Биоэкология
- Ответьте пожалуйста на вопросы
- Помощь в сдаче дисциплин, короткие сроки, впечатляющий результат, недорого
- математика СПО
mti.prioz.ru
Система управления технологическими процессами [Архив]
Часть 1. Ответил на 51.Отношение абсолютной погрешности к номинальному (желаемому) значению выходной величины называется
Относительной погрешностью
2.Выделяют следующие классы АСУ ТП:
Локальные, централизованные и распределенные системы управления
3.Разность между действительным значением выходной величины и его номинальным значением называется
Абсолютной погрешностью
4.Погрешности делятся на
Основные и дополнительные
5.Совокупность технологического оборудования и реализованного на нем по регламенту процесса производства называется
ТОУ
6.К статическим характеристикам датчиков не относится
Реальные нереверсивные
7.ГСП подразделяют на самостоятельные ветви по видам энергии. Какая из них не используется
Атомная
8. Какая из совместимостей не обеспечивается комплексами ГСП
Математическая
9.Отношение абсолютной погрешности к нормирующему значению называется
Приведенной погрешностью
10.Применение компенсационной схемы не приведет к:
Получению реверсивной характеристики
Часть 2. Ответил на 4
1.К недостаткам дифференциального индуктивного датчика относятся:
Большая инерционность, большие размеры, небольшой кпд.
2.К недостаткам емкостного датчика относятся:
Необходимость усиления снимаемого сигнала, необходимость тщательной экранировки датчика, применение высокочастотного источника
3.К параметрическим датчикам не относятся:
Термоэлектронные
4.К недостаткам термоэлектронного преобразователя относятся:
Табличная градуировка, слабый сигнал и низкая чувствительность, большая инерционность, необходимость фиксации температуры холодного спая
5.К недостаткам металлических термосопротивлений относятся:
Большие габариты, большая инерционность, малая величина R, окисляемость.
6.К параметрическим датчикам не относятся:
Термоэлектронные
7.К недостаткам полупроводниковых тензодатчиков относятся:
Ограниченный температурный диапазон без внешней компенсации, наличие гистерезиса, хрупкость
8.К недостаткам проволочных тензометрических датчиков относятся:
Малая чувствительность температурная погрешность
9.К недостаткам резистивных ИП относятся:
Пониженная надежность, износ, контактное сопротивление, относительно большие перемещения и малая скорость движка, дискретность
10.К недостаткам полупроводниковых терморезисторов относятся:
Более узкий рабочий диапазон, нелинейность, большой разброс значений
Часть 3. Ответил на 4
1.При генераторном режиме работы ДПТ механическая мощность потребляемая от источника не зависит от:
Потерь во внешней электрической цепи
2.При постоянном магнитном потоке Ф ЭДС якоря машины
пропорциональна частоте вращения ротора
3.Режим, при котором электромагнитный момент машины М совпадает по направлению со скоростью, а ЭДС якоря Ея направлена встречно току якоря называется:
Двигательным режимом
4.Аналого-цифровое преобразование содержит следующие фазы:
Дискретизацию по времени, квантование по уровню, цифровое, двоичное кодирование
5.К преимуществам ДПТ перед другими видами ИЭ не относятся:
Наличие щеточно-коллекторного устройства
6.Преимущества цифровой формы:
Большая помехоустойчивость; простота передачи на расстояние.
7.Исполнительные элементы по виду используемой энергии делятся на группы:
Электрические, пневматические и гидравлические.
8.Режим, при котором ток якоря Iя и ЭДС Ея совпадают по направлению, а электромагнитный момент, развиваемый машиной, противоположен по направлению вращению ротора называется:
Генераторным режимом
9.К ошибкам, возникающим при аналого-цифровом преобразовании не относятся:
Ошибки метода
10.К основным характеристикам ИЭ не относятся:
Ремонтопригодность и обслуживаемость
Часть 4. Ответил на 4
1.Для пуска и остановки двух и трехфазных асинхронных двигателей используют следующие виды контакторов
Магнитный пускатель
2.Устройство для автоматической коммутации электрических цепей по сигналу управления называется
Реле
3.Различают следующие статические режимы АД:
Режим генераторного торможения, режим торможения противовключением, установившийся режим.
4.К режимам работы ШД не относятся:
Переходный режим
5.Преимущества АД перед ДПТ:
Малая инерционность, бесконтактность, дешевизна.
6.По времени срабатывания реле подразделяются на:
Безинерционные, быстродействующие, замедленные, реле времени.
7.Максимальная величина электрической мощности, коммутируемая в управляемой цепи, называется
Мощностью управления
8.Недостатки АД в сравнении с ДПТ:
Большие тепловые потери, малый пусковой момент, нелинейные характеристики
9.К достоинствам гистерезисного двигателя не относятся:
Значительный нагрев ротора.
10.Минимальная электрическая мощность, которая должна быть подведена к реле от управляющей цепи для приведения в действие управляющей цепи, называется
Мощностью срабатывания
Итоговое тестирование сдал на 4
1.Достоинства полупроводниковых тензодатчиков:
Высокая тензочувствительность, компактность, малая погрешность (до 0,1%), быстродействие. большой срок службы
2.Достоинства термометров сопротивления:
Простота конструкции, возможность получения достаточно прямолинейной характеристики.
3.К основным характеристикам ИЭ не относятся:
Ремонтопригодность и обслуживаемость
4.Комплексы ГСП должны обеспечивать следующие совместимости:
Информационную, эксплуатационную, конструктивную, метрологическую.
5.Режим, при котором электромагнитный момент машины М совпадает по направлению со скоростью, а ЭДС якоря Ея направлена встречно току якоря называется:
Двигательным режимом
6.Устройство для автоматической коммутации электрических цепей по сигналу управления называется
Реле
7.Достоинства потенциометрических датчиков:
Простота конструкции, возможность получения достаточно прямолинейной характеристики, стабильность характеристик, значительная величина выходного сигнала.
8.При генераторном режиме работы ДПТ механическая мощность потребляемая от источника не зависит от:
Потерь во внешней электрической цепи
9.К режимам работы ШД не относятся:
Переходный режим
10.К статическим характеристикам датчиков не относится
Реальные нереверсивные
11.Недостатки АД в сравнении с ДПТ:
Большие тепловые потери, малый пусковой момент, нелинейные характеристики
12.Отношение абсолютной погрешности к нормирующему значению называется
Приведенной погрешностью
13.К генераторным датчикам не относятся:
Трансформаторные
14.ГСП подразделяют на самостоятельные ветви по видам энергии. Какая из них не используется
Ядерная
15.По времени срабатывания реле подразделяются на:
Безинерционные, быстродействующие, замедленные, реле времени.
16.Функции типового обеспечения АСУ ТП делятся на
Управляющие, информационные и вспомогательные
mti.prioz.ru