
9. Определение обратной матрицы. Условие существования обратной матрицы. Формула нахождения обратной матрицы.
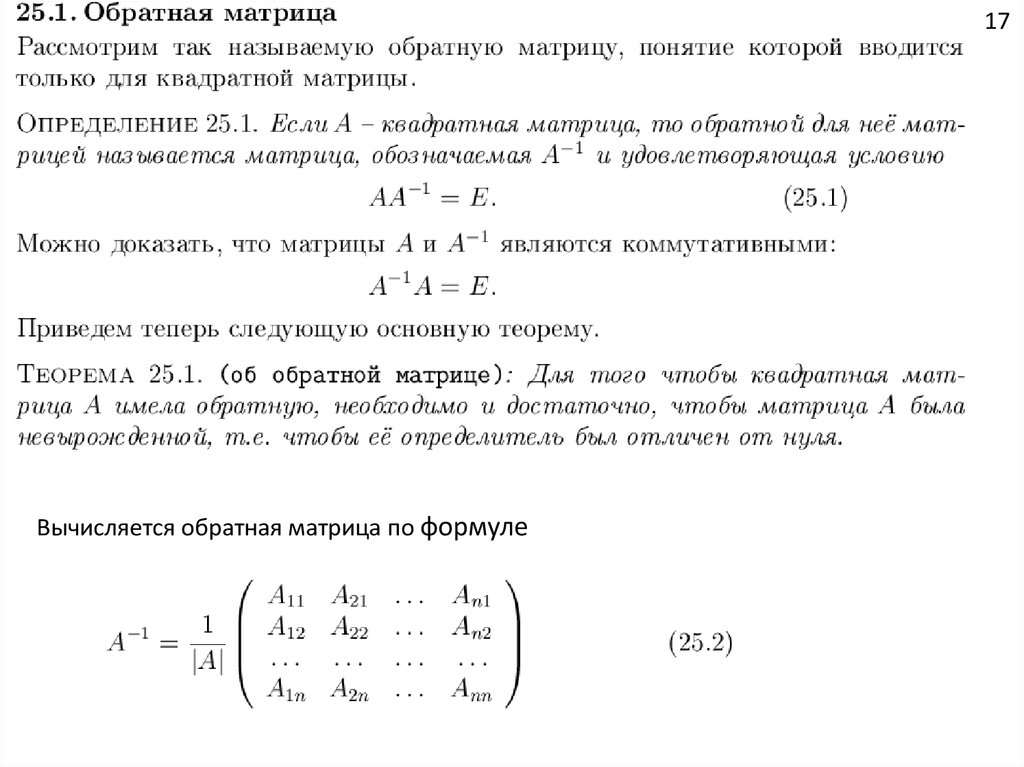
Матрица называется обратной матрице А, если выполняется условие , где Е – единичная матрица того же порядка, что и матрица А. Матрица имеет те же размеры, что и матрица А. Понятие обратной матрицы распространяется только на квадратные матрицы. Квадратная матрица, определитель которой отличен от нуля, называется невырожденной.
Квадратная матрица, определитель которой равен нулю, называется вырожденной.
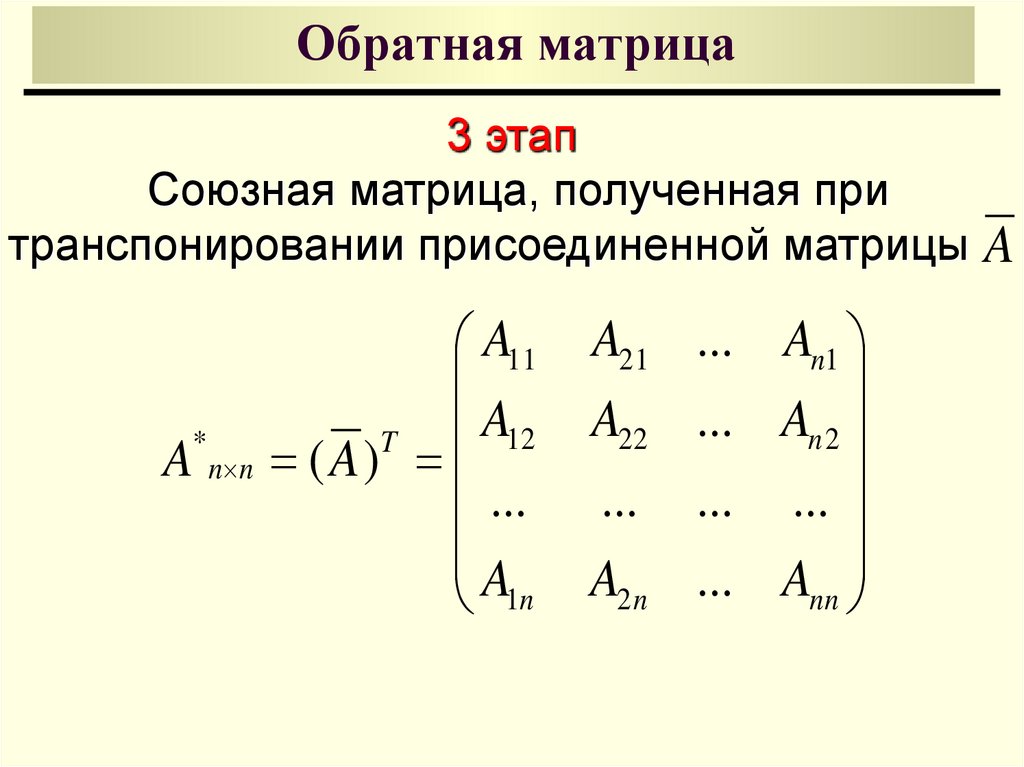
Союзная матрица: , где – алгебраическое дополнение элемента ij данной матрицы.
Условие существования обратной матрицы. Лемма: Если А – квадратная матрица n-ого порядка, – союзная к ней матрица, то , где Е – единичная матрица n-ого порядка.
Доказательство:
Рассмотрим произведение матрицы А и
При
вычислении элементов матрицы произведения,
стоящих на главной диагонали, будет
получаться сумма произведений элементов
i-ой
строки матрицы А на их алгебраическое
дополнение, а это равно определителю.
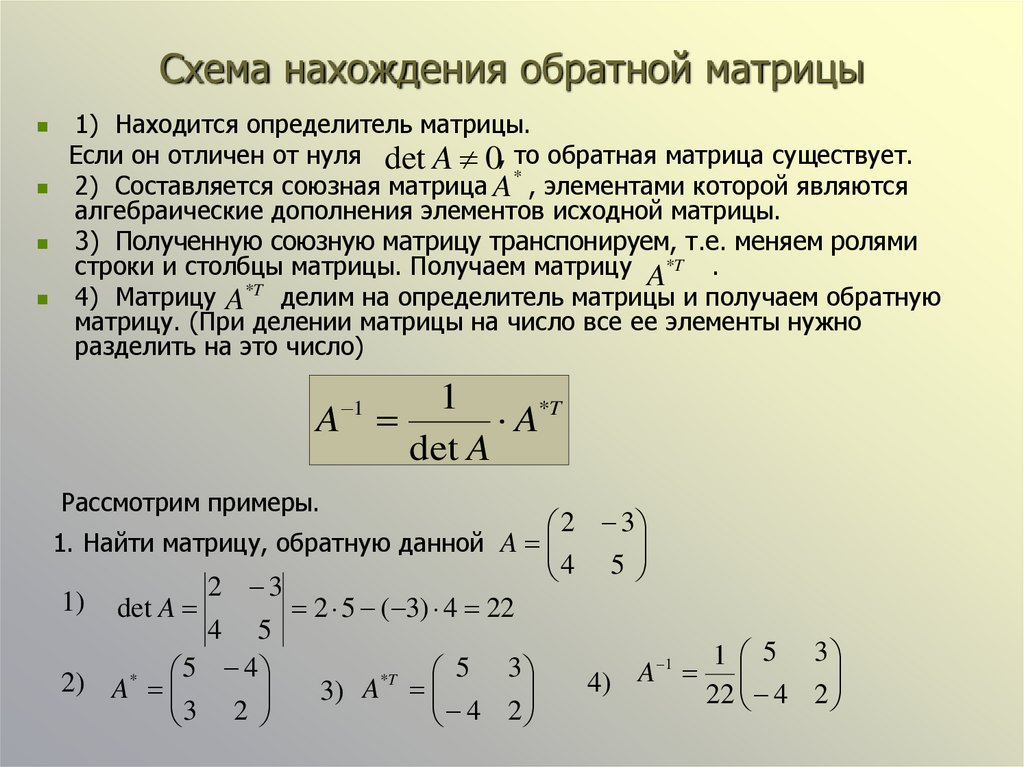
Теорема 1, о существовании обратной матрицы. Для того, чтобы существовала матрица , обратная матрице А, необходимо и достаточно, чтобы матрица А была невырожденной.
Доказательство. Необходимость. Пусть матрица А имеет обратную матрицу , тогда . По 9-ому свойству определителей . Так как |E|=1, то , следовательно матрица A – невырожденная.
Достаточность. Пусть матрица А – невырожденная, то есть . Докажем, что существует такая матрица , которая является обратной к матрице А и докажем, что такой матрицей является , где – союзная матрица к A. Согласно лемме
Формула обратной матрицы:
Теорема
2, о единственности обратной матрицы.
Для невырожденной матрицы существует
единственная обратная матрица.
Доказательство. Пусть существуют матрицы и обратные невырожденной матрице А, тогда (слева).
10. Ранг матрицы и его свойства.
Рассмотрим матрицу . Выделим в ней k строк и k столбцов, где , необязательно рядом. Из элементов, стоящих на пересечении выделенных строк и столбцов составить определитель k-ого порядка. Все такие определители называются минорами матрицы (не путать с минорами элементов!!!).
Рангом матрицы А называется наибольший из порядков миноров данной матрицы, отличных от нуля. Обозначается r, r(A), rang.
Из определения следует:
1. Ранг матрицы не превосходит меньший из ее размеров, то есть .
2. , тогда и только тогда, когда все элементы матрицы равны нулю, то есть матрица – нулевая.
3. Для квадратной матрицы n-ого порядка r=n тогда и только тогда, когда матрица А – невырожденная.
Свойства ранга матрицы:
1.
При транспонировании ранг матрицы не
меняется.
2. Ранг матрицы, полученный из данной вычеркиванием какого-либо ряда, равен рангу данной матрицы или меньше его на единицу.
3. Ранг матрицы, полученный из данной приписыванием к ней ряда, элементами которого являются произвольные числа, равен рангу исходной матрицы или больше его на единицу.
4. Если вычеркнуть из матрицы или прибавить к ней нулевой ряд, то ранг матрицы не меняется.
5. Ранг матрицы не изменяется при элементарных преобразованиях матрицы.
Краткий курс высшей математики
Краткий курс высшей математики
ОглавлениеПРЕДИСЛОВИЕГЛАВА I. МЕТОД КООРДИНАТ. ПОНЯТИЕ ФУНКЦИИ § 1. ДЕЙСТВИТЕЛЬНЫЕ ЧИСЛА. КООРДИНАТЫ ТОЧКИ НА ПРЯМОЙ 2. Геометрическое изображение действительных чисел. Координаты точки на прямой 3. Абсолютная величина действительного числа 4. Расстояние между двумя точками на прямой 2. Расстояние между двумя точками на плоскости 3. Деление отрезка в данном отношении 4. Координаты точки в пространстве 5. Расстояние между двумя точками в пространстве § 3. УГОЛ МЕЖДУ ДВУМЯ ОСЯМИ. ПОЛЯРНЫЕ КООРДИНАТЫ 2. Полярные координаты 3. Зависимость между декартовыми и полярными координатами § 4. ФУНКЦИОНАЛЬНАЯ ЗАВИСИМОСТЬ 2. Понятие функции 3. 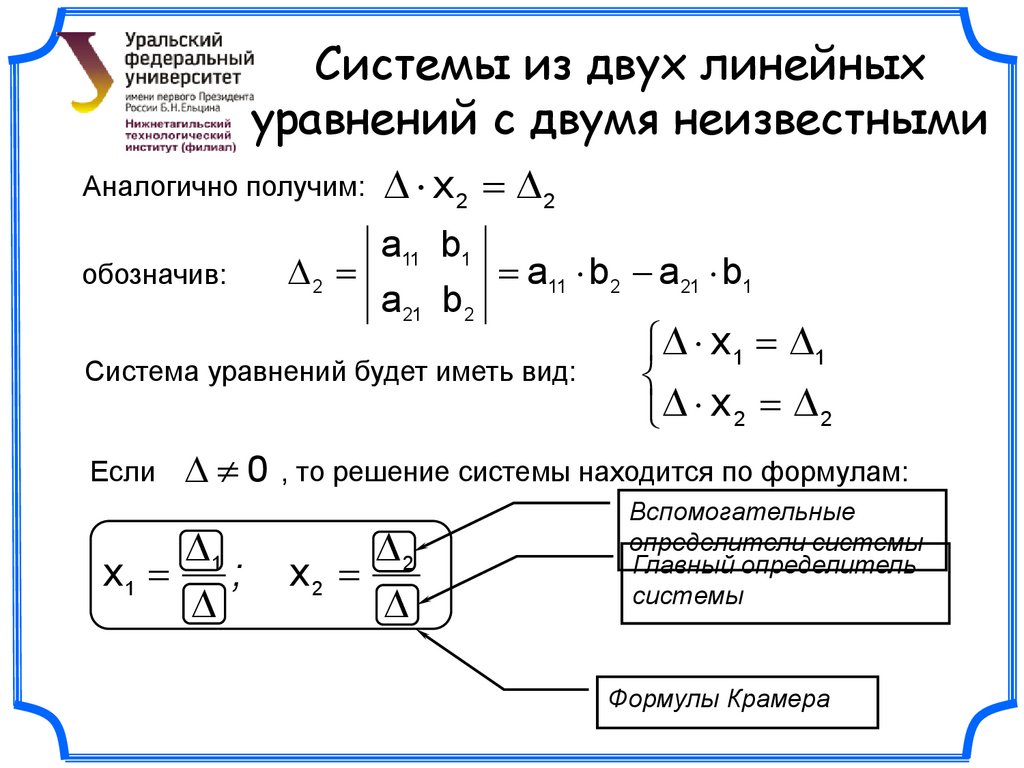 График функции График функции4. Способы задания функций 5. Основные элементарные функции и их графики 6. Сложные функции. Элементарные функции 7. Целые и дробно-рациональные функции 8. Функции четные и нечетные. Периодические функции § 5. УРАВНЕНИЕ ЛИНИИ 2. Нахождение уравнения линии по ее геометрическим свойствам § 6 ПРЕОБРАЗОВАНИЕ КООРДИНАТ 2. Поворот осей координат ГЛАВА II. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ НА ПЛОСКОСТИ § 1. ПРЯМАЯ 2. Уравнение прямой с угловым коэффициентом 3. Уравнение прямой, параллельной оси ординат 4. Общее уравнение прямой и его частные случаи 5. Точка пересечения прямых. Построение прямой по ее уравнению 6. Вычисление угла между двумя прямыми. Условия параллельности и перпендикулярности двух прямых 7. Уравнение прямой, проходящей через данную точку в заданном направлении 8. Пучок прямых 9. Уравнение прямой, проходящей через две данные точки 10. Расстояние от точки до прямой § 2. КРИВЫЕ ВТОРОГО ПОРЯДКА 2. 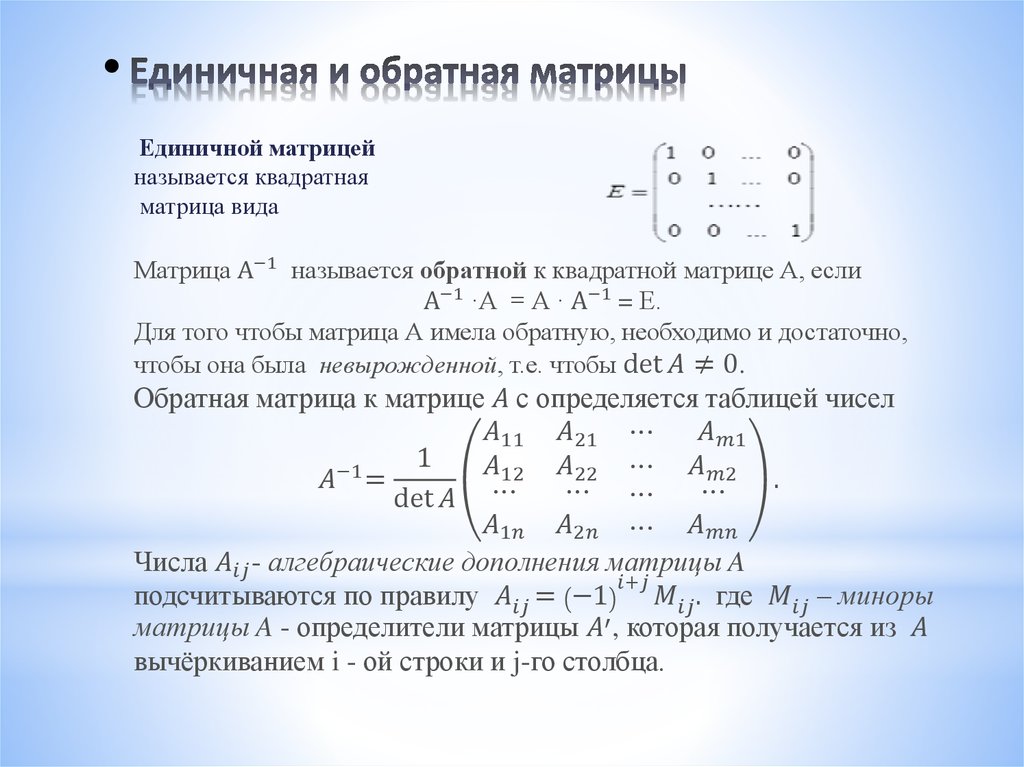 Окружность Окружность3. Эллипс 4. Гипербола 5. Парабола 6. Окружность, эллипс, гипербола и парабола как конические сечения 7. Упрощение уравнения кривой второго порядка. График квадратного трехчлена 8. Уравнение равносторонней гиперболы, асимптоты которой приняты за оси координат 10. Преобразование уравнения кривой второго порядка, не содержащего члена с произведением координат ГЛАВА III. ЭЛЕМЕНТЫ ЛИНЕЙНОЙ И ВЕКТОРНОЙ АЛГЕБРЫ § 1. ЭЛЕМЕНТЫ ТЕОРИИ ОПРЕДЕЛИТЕЛЕЙ 2. Определитель третьего порядка 3. Понятие об определителях высших порядков § 2. СИСТЕМЫ УРАВНЕНИЙ ПЕРВОЙ СТЕПЕНИ 2. Однородная система двух уравнений первой степени с тремя неизвестными 3. Система трех уравнений первой степени с тремя неизвестными 4. Однородная система трех уравнений первой степени с тремя неизвестными § 3. ЭЛЕМЕНТЫ ВЕКТОРНОЙ АЛГЕБРЫ 2. Линейные операции над векторами 4. Проекция вектора на ось и составляются вектора по оси 5.  Разложение вектора на составляющие по осям координат Разложение вектора на составляющие по осям координат6. Направляющие косинусы вектора 7. Условие коллинеарности двух векторов 8. Скалярное произведение 9. Выражение скалярного произведения через проекции перемножаемых векторов 10. Косинус угла между двумя векторами 11. Векторное произведение 12. Выражение векторного произведения через проекции перемножаемых векторов 13. Смешанное произведение трех векторов 14. Геометрический смысл смешанного произведения 15. Условие компланарности трех векторов § 4. МАТРИЦЫ И ДЕЙСТВИЯ НАД НИМИ 2. Равенство матриц. Действия над матрицами 3. Обратная матрица 4. Матричная запись и матричное решение системы уравнений первой степени § 5. ЛИНЕЙНЫЕ ОТОБРАЖЕНИЯ 2. Преобразование координат 3. Приведение квадратичной формы к каноническому виду 4. Упрощение общего уравнения кривой второго порядка ГЛАВА IV. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ § 1. ПЛОСКОСТЬ 2. Нормальный вектор плоскости. 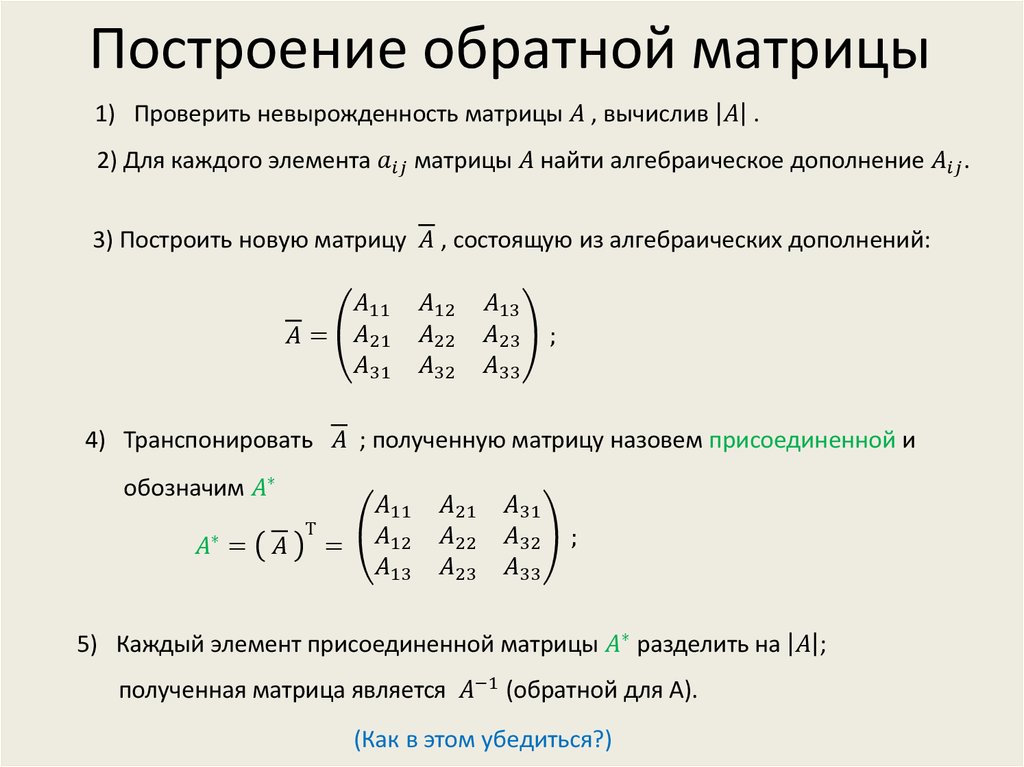 3. Общее уравнение плоскости и его частные случаи 4. Построение плоскости по ее уравнению 5. Угол между плоскостями. Условия параллельности и перпендикулярности двух плоскостей 6. Точка пересечения трех плоскостей § 2. ПРЯМАЯ В ПРОСТРАНСТВЕ 2. Общие уравнения прямой 3. Векторное уравнение прямой. Параметрические уравнения прямой 4. Канонические уравнения прямой 5. Уравнения прямой, проходящей через две точки 6. Угол между двумя прямыми. Условия параллельности и перпендикулярности прямых § 3. Прямая и плоскость в пространстве 2. Точка пересечения прямой с плоскостью 3. Расстояние от точки до плоскости 4. Пучок плоскостей § 4. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА 2. Цилиндрические поверхности 3. Конические поверхности 4. Поверхность вращения 6. Гиперболоиды 7. Параболоиды ГЛАВА V. ТЕОРИЯ ПРЕДЕЛОВ § 1. ПРЕДЕЛ ФУНКЦИИ 2. Предел функции при х -> -оо 3. 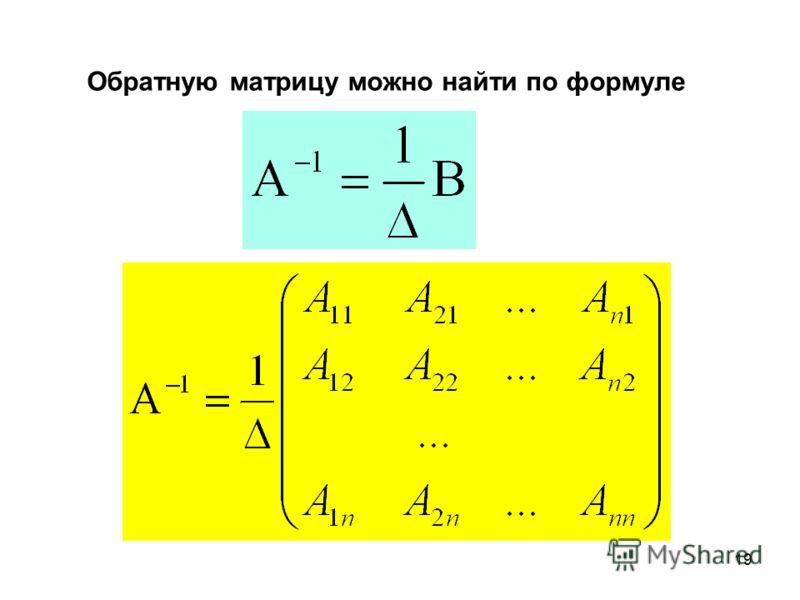 Предел функции при х->х0 Предел функции при х->х04. Бесконечно малые функции. Ограниченные функции 5. Бесконечно большие функции и их связь с бесконечно малыми функциями 6. Основные теоремы о пределах 7. Предел функции при x -> 0 8. Последовательность. Число e 9. Натуральные логарифмы 10. Сравнение бесконечно малых функций § 2. НЕПРЕРЫВНЫЕ ФУНКЦИИ 2. Операции над непрерывными функциями. Непрерывность элементарных функций 3. Свойства функций, непрерывных на сегменте 4. Понятие об обратной функции 5. Обратные тригонометрические функции 6. Показательная и логарифмическая функции 7. Понятие о гиперболических функциях ГЛАВА VI. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ ФУНКЦИЙ ОДНОЙ ПЕРЕМЕННОЙ 1. Приращение аргумента и приращение функции 2. Определение непрерывности функции с помощью понятии приращения аргумента и приращения функции 3. Задачи, приводящие к понятию производной 5. Дифференцируемость функции 6.  Геометрический смысл производной Геометрический смысл производной7. Производные некоторых основных элементарных функций 8. Основные правила дифференцирования 9. Производная обратной функции 10. Производные обратных тригонометрических функций 11. Производная сложной функции § 12. Производные гиперболических функций 13. Производная степенной функции с любым показателем 14. Сводная таблица формул дифференцирования 15. Неявные функции и их дифференцирование 16. Уравнения касательной а нормали к кривой 17. Графическое дифференцирование § 2. ПРОИЗВОДНЫЕ ВЫСШИХ ПОРЯДКОВ 1. Нахождение производных высших порядков 2. Механический смысл второй производной § 3. ДИФФЕРЕНЦИАЛ ФУНКЦИИ 2. Производная как отношение дифференциалов 3. Дифференциал суммы, произведения и частного функций 4. Дифференциал сложной функции. Инвариантность формы дифференциала 5. Применение дифференциала к приближенным вычислениям 6. Дифференциалы высших порядков § 4. ФУНКЦИИ, ЗАДАННЫЕ ПАРАМЕТРИЧЕСКИ, И ИХ ДИФФЕРЕНЦИРОВАНИЕ 2. 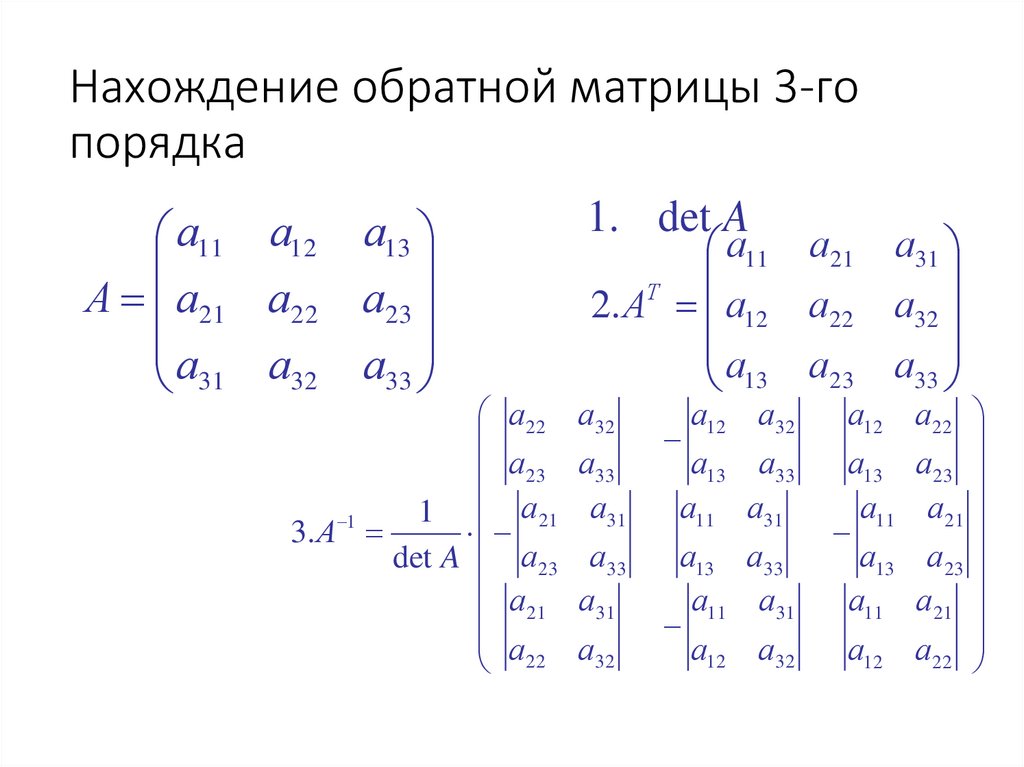 Дифференцирование функций, заданных параметрически Дифференцирование функций, заданных параметрически§ 5. ВЕКТОРНАЯ ФУНКЦИЯ СКАЛЯРНОГО АРГУМЕНТА 2. Векторная функция скалярного аргумента и ее производная 3. Уравнения касательной прямой и нормальной плоскости к пространственной кривой 4. Механический смысл первой и второй производных векторной функции скалярного аргумента § 6. НЕКОТОРЫЕ ТЕОРЕМЫ О ДИФФЕРЕНЦИРУЕМЫХ ФУНКЦИЯХ 2. Теорема Ролля 3. Теорема Лагранжа 4. Правило Лопиталя § 7. ПРИЛОЖЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИЙ И ПОСТРОЕНИЮ ГРАФИКОВ 2. Максимум и минимум функции 3. Достаточный признак существования экстремума, основанный на знаке второй производной 4. Отыскание наибольшего и наименьшего значений функции 5. Применение теории максимума и минимума к решению задач 6. Выпуклость и вогнутость графика функции. Точки перегиба 7. Асимптоты графика функции 8. Общая схема исследования функции и построение ее графика § 8. ПРИБЛИЖЕННОЕ РЕШЕНИЕ УРАВНЕНИЙ 2. Уточнение найденных значений корней методом хорд и касательных § 9. 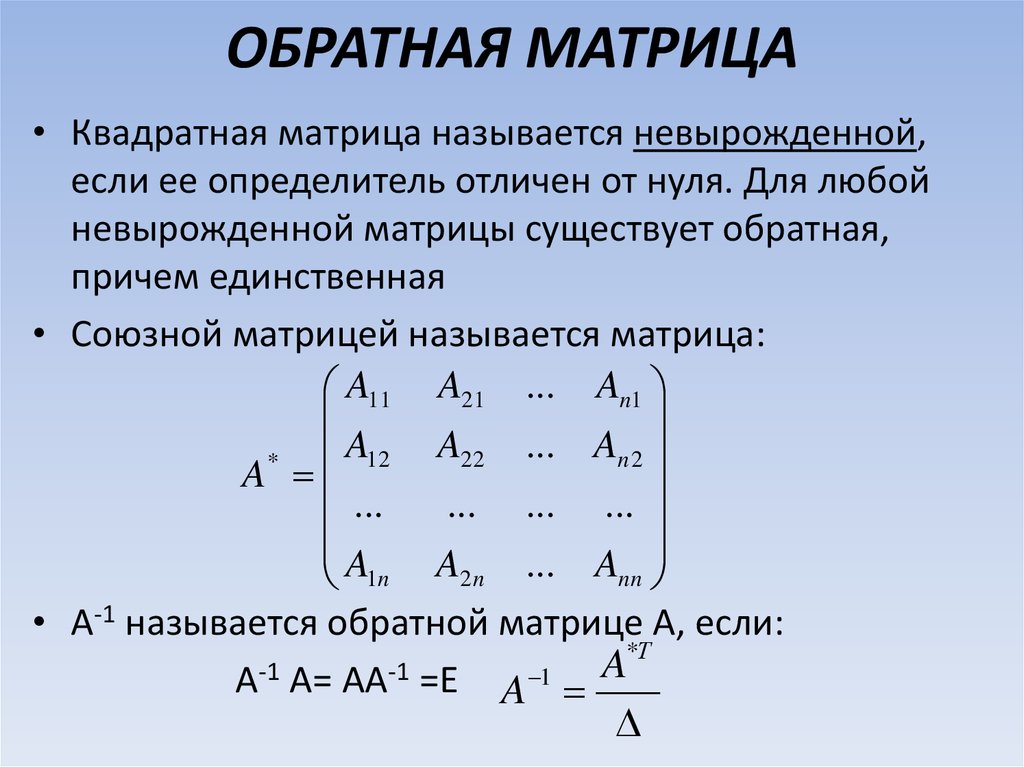 ИНТЕРПОЛЯЦИОННАЯ ФОРМУЛА ЛАГРАНЖА ИНТЕРПОЛЯЦИОННАЯ ФОРМУЛА ЛАГРАНЖАГЛАВА VII. НЕОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ § 1. НЕОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ И ЕГО СВОЙСТВА 2. Геометрический смысл неопределенного интеграла 3. Таблица основных интегралов 4. Основные свойства неопределенного интеграла § 2. ОСНОВНЫЕ МЕТОДЫ ИНТЕГРИРОВАНИЯ 2. Интегрирование методом замены переменной 3. Интегрирование по частям § 3. ИНТЕГРИРОВАНИЕ РАЦИОНАЛЬНЫХ ФУНКЦИЙ 2. Рациональные дроби. Выделение правильной рациональной дроби 3. Интегрирование простейших рациональных дробей 4. Разложение правильной рациональной дроби на простейшие дроби 5. Метод неопределенных коэффициентов 6. Интегрирование рациональных дробей § 4. Интегрирование тригонометрических функций 2. Рациональные функции двух переменных 3. Интегралы вида § 5. ИНТЕГРИРОВАНИЕ НЕКОТОРЫХ ИРРАЦИОНАЛЬНЫХ ФУНКЦИЙ 2. Интеграл вида 3. Интегралы видов 4. Интегралы вида § 6. ОБЩИЕ ЗАМЕЧАНИЯ О МЕТОДАХ ИНТЕГРИРОВАНИЯ. ИНТЕГРАЛЫ, НЕ БЕРУЩИЕСЯ В ЭЛЕМЕНТАРНЫХ ФУНКЦИЯХ 2. 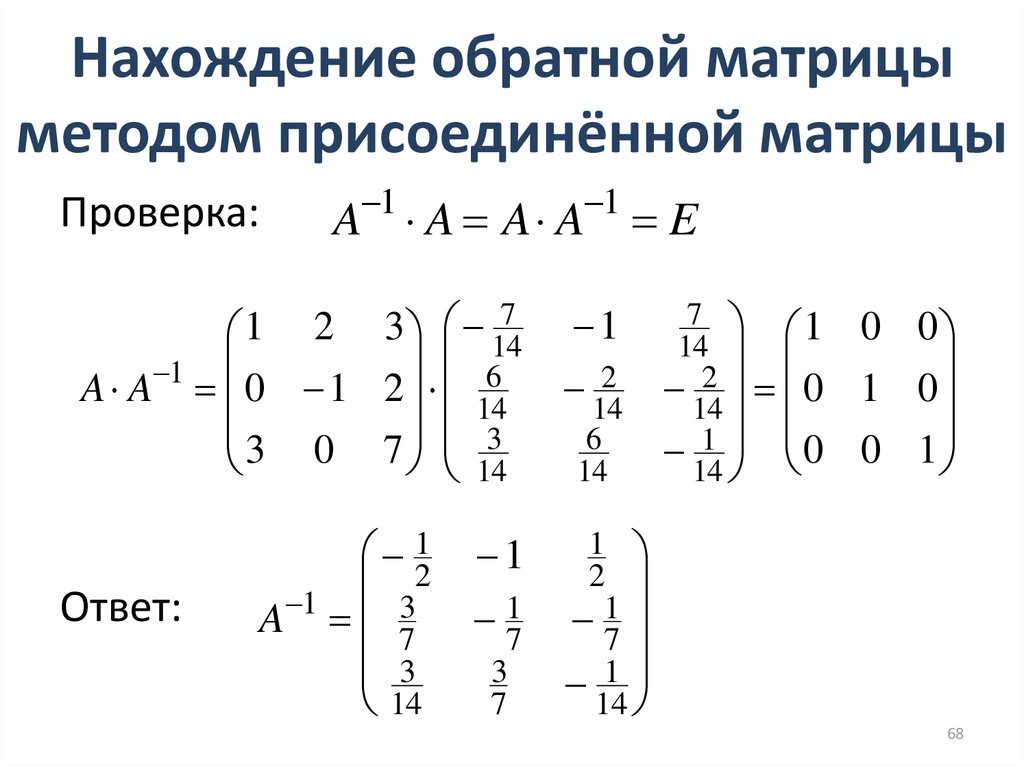 Понятие об интегралах, не берущихся в элементарных функциях Понятие об интегралах, не берущихся в элементарных функцияхГЛАВА VIII. ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ § 1. ЗАДАЧИ, ПРИВОДЯЩИЕ К ОПРЕДЕЛЕННОМУ ИНТЕГРАЛУ 2. Задача о работе переменной силы § 2. ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ 2. Свойства определенного интеграла 3. Производная интеграла по переменной верхней границе 4. Формула Ньютона—Лейбница 5. Замена переменной в определенном интеграле 6. Интегрирование по частям в определенном интеграле § 3. ГЕОМЕТРИЧЕСКИЕ И ФИЗИЧЕСКИЕ ПРИЛОЖЕНИЯ ОПРЕДЕЛЕННОГО ИНТЕГРАЛА 2. Вычисление площади в полярных координатах 3. Вычисление объема тела по известным поперечным сечениям 4. Объем тела вращения 5. Длина дуги кривой 6. Дифференциал дуги 7. Площадь поверхности вращения 8. Общие замечания о решении задач методом интегральных сумм § 4. КРИВИЗНА ПЛОСКОЙ КРИВОЙ 2. Вычисление кривизны 3. Радиус кривизны. Круг кривизны. Центр кривизны 4. Эволюта и эвольвента § 5. НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ 2. 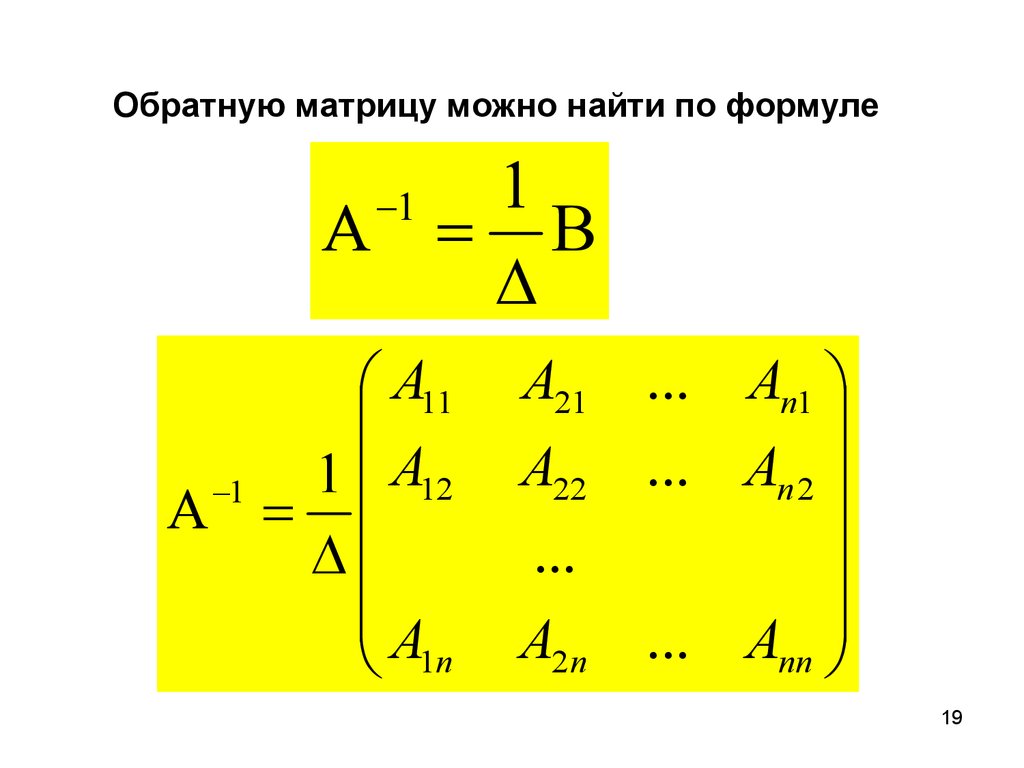 Интегралы от разрывных функций Интегралы от разрывных функций3. Признаки сходимости несобственных интегралов § 6. ПРИБЛИЖЕННЫЕ МЕТОДЫ ВЫЧИСЛЕНИЯ ОПРЕДЕЛЕННЫХ ИНТЕГРАЛОВ 2. Метод трапеций 3. Метод параболических трапеций (метод Симпсона) ГЛАВА IX. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ ФУНКЦИЙ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ § 1. ФУНКЦИИ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ 2. График функции двух переменных 3. Функции трех и большего числа переменных § 2. Предел функции нескольких переменных. Непрерывность функции. Точки разрыва 2. Непрерывность функции нескольких переменных 3. Понятие области 4. Точки разрыва 5. Свойства функций, непрерывных в ограниченной замкнутой области § 3. ЧАСТНЫЕ ПРОИЗВОДНЫЕ 2. Геометрический смысл частных производных функции двух переменных 3. Частные производные высших порядков § 4. ПОЛНЫЙ ДИФФЕРЕНЦИАЛ ФУНКЦИИ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ 2. Полный дифференциал функции 3. Приложение полного дифференциала к приближенным вычислениям § 5. Дифференцирование сложных и неявных функций 2. 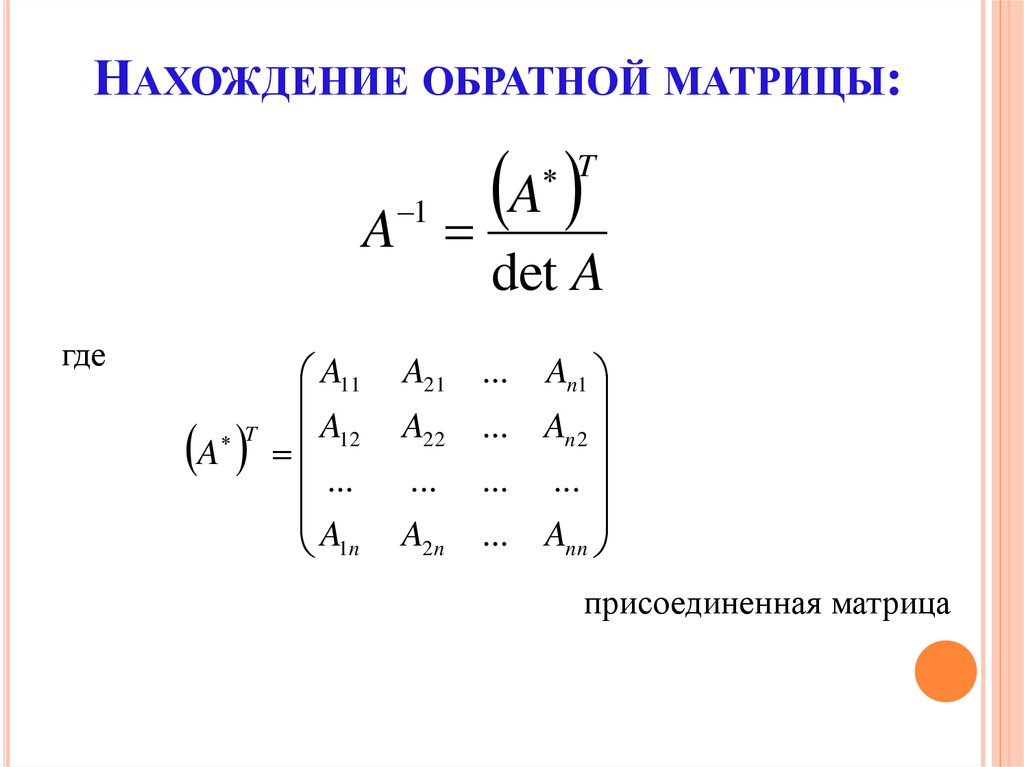 Инвариантность формы полного дифференциала Инвариантность формы полного дифференциала3. Дифференцирование неявных функций § 6. СКАЛЯРНОЕ ПОЛЕ 2. Производная по направлению 3. Градиент 4. Касательная плоскость а нормаль к поверхности 5. Геометрический смысл полного дифференциала функции двух переменных § 7. ЭКСТРЕМУМ ФУНКЦИЙ ДВУХ ПЕРЕМЕННЫХ 2. Наибольшее и наименьшее значения функции двух переменных ГЛАВА X. КРАТНЫЕ И КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ § 1. ДВОЙНОЙ ИНТЕГРАЛ 2. Двойной интеграл. Теорема существования 3. Свойства двойного интеграла 4. Вычисление двойного интеграла в декартовых координатах 5. Вычисление двойного интеграла в полярных координатах 6. Приложения двойного интеграла § 2. ТРОЙНОЙ ИНТЕГРАЛ 2. Тройной интеграл и его свойства 3. Вычисление тройного интеграла в декартовых координатах 4. Вычисление тройного интеграла в цилиндрических координатах 5. Приложения тройного интеграла § 3. КРИВОЛИНЕЙНЫЙ ИНТЕГРАЛ 2. Задача о работе. Криволинейный интеграл 3. 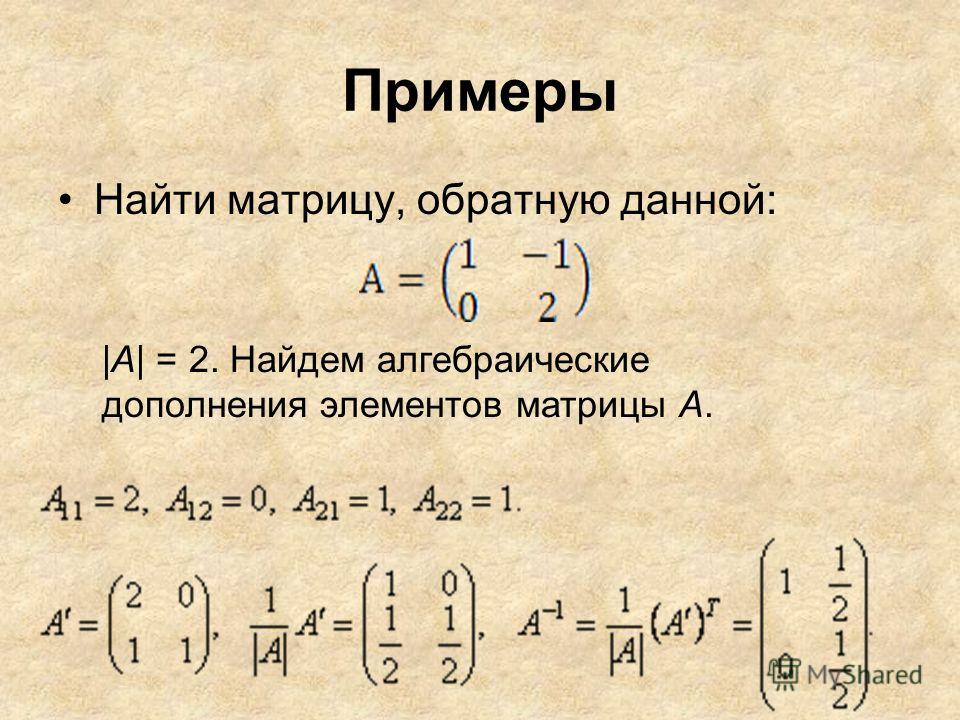 Вычисление криволинейного интеграла Вычисление криволинейного интеграла4. Формула Остроградского — Грина 5. Независимость криволинейного интеграла от пути интегрирования 6. Отыскание первообразной по полному дифференциалу 7. Криволинейный интеграл по длине дуги ГЛАВА XI. РЯДЫ § 1. ЧИСЛОВЫЕ РЯДЫ 2. Геометрическая прогрессия 3. Простейшие свойства числовых рядов 4. Необходимый признак сходимости ряда 5. Достаточные признаки сходимости знакоположительных рядов 6. Знакопеременные ряды 7. Остаток ряда и его оценка § 2. ФУНКЦИОНАЛЬНЫЕ РЯДЫ 2. Правильно сходящиеся функциональные ряды и их свойства § 3. СТЕПЕННЫЕ РЯДЫ 2. Свойства степенных рядов 3. Ряды по степеням разности х-а 4. Разложение функций в степенные ряды. Ряд Тейлора 5. Разложение некоторых элементарных функций в ряды Тейлора и Маклорена § 4. ПРИЛОЖЕНИЕ РЯДОВ К ПРИБЛИЖЕННЫМ ВЫЧИСЛЕНИЯМ 2. Приближенное вычисление интегралов § 5. ПОНЯТИЕ О ФУНКЦИИ КОМПЛЕКСНОЙ ПЕРЕМЕННОЙ. СТЕПЕННЫЕ РЯДЫ В КОМПЛЕКСНОЙ ОБЛАСТИ 2.  Числовые ряды с комплексными членами Числовые ряды с комплексными членами3. Степенные ряды в комплексной области § 6. РЯДЫ ФУРЬЕ 2. Ряд Фурье 3. Сходимость ряда Фурье 4. Ряды Фурье для четных и нечетных функций 5. Разложение в ряд Фурье функций с периодом 2l ГЛАВА XII. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ § 1. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПЕРВОГО ПОРЯДКА 2. Дифференциальные уравнения первого порядка 3. Уравнения с разделяющимися переменными 4. Однородные уравнения 5. Линейные уравнения 6. Уравнение в полных дифференциалах 7. Особые решения 8. Приближенное решение дифференциальных уравнений первого порядка методом Эйлера § 2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 2. Простейшие уравнения второго порядка, допускающие понижение порядка 3. Понятие о дифференциальных уравнениях высших порядков § 3. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 2. Линейные однородные дифференциальные уравнения второго порядка 3. Линейные неоднородные дифференциальные уравнения второго порядка 4. 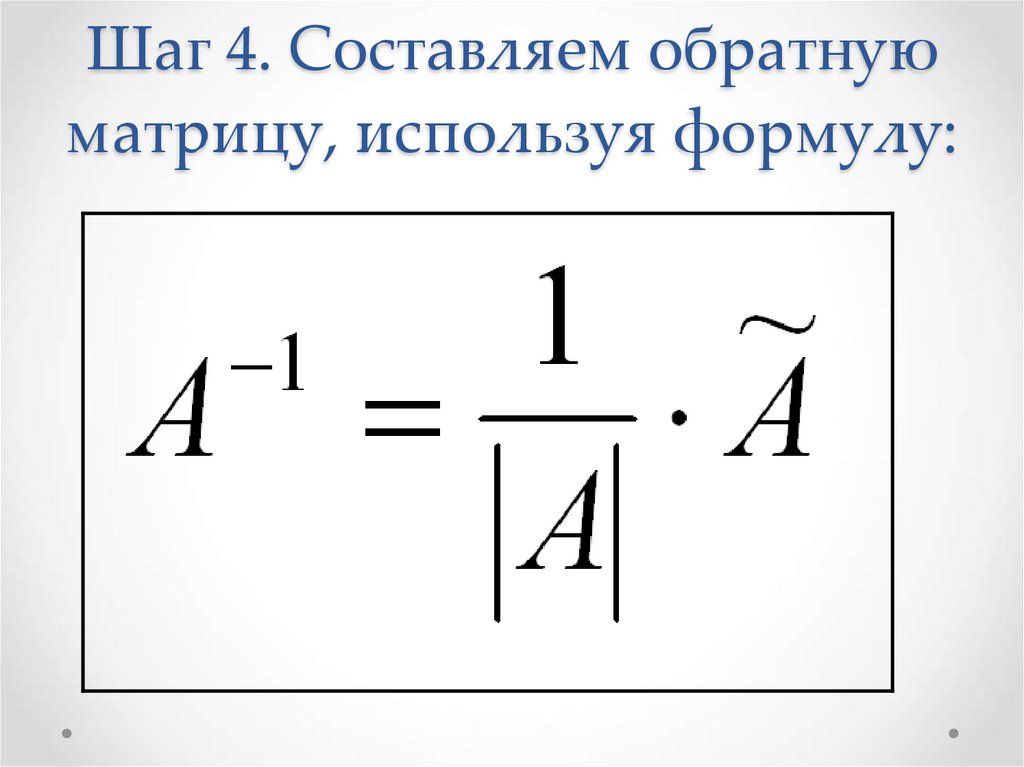 Метод вариации произвольных постоянных Метод вариации произвольных постоянных§ 4. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ 2. Линейные неоднородные дифференциальные уравнения второго порядка с постоянными коэффициентами 3. Приложение линейных дифференциальных уравнений второго порядка к изучению механических и электрических колебаний § 5. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВЫСШИХ ПОРЯДКОВ 2. Линейные дифференциальные уравнения n-го порядка с постоянными коэффициентами § 6. ИНТЕГРИРОВАНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ С ПОМОЩЬЮ РЯДОВ § 7. ПОНЯТИЕ О СИСТЕМАХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 2. Системы линейных дифференциальных уравнений с постоянными коэффициентами ПРИЛОЖЕНИЕ 1. ИНТЕРПОЛЯЦИОННАЯ ФОРМУЛА НЬЮТОНА ПРИЛОЖЕНИЕ 2. МЕТОД НАИМЕНЬШИХ КВАДРАТОВ |
 Оно в основном охватывает весь материал, предусмотренный обязательной программой. Достаточное количество решенных примеров и задач способствует лучшему усвоению теоретического материала.
Оно в основном охватывает весь материал, предусмотренный обязательной программой. Достаточное количество решенных примеров и задач способствует лучшему усвоению теоретического материала.
реальный анализ — Вывод формулы обратной матрицы
Задавать вопрос
спросил
Изменено 5 лет, 2 месяца назад
Просмотрено 24к раз
$\begingroup$ 9{-1} = \frac{1}{ad — bc}\begin{bmatrix}d & -b\ \\-c & a \ \end{bmatrix}$$
Как это можно вывести?
Мне просто нужны подсказки, я плохо разбираюсь в свойствах и т. {-1}$.
{-1}$.
$\endgroup$
$\begingroup$
Обратите внимание, что
$$\begin{align}\begin{bmatrix}a & b\ |\ 1 & 0 \\c & d \ |\ 0 & 1\end{bmatrix} &\Leftrightarrow\begin{bmatrix }a & b\ &|\ 1 & 0 \\0 & \frac{ad — bc}{a} \ &|\ -\frac{c}{a} & 1\end{bmatrix} \Leftrightarrow\begin{ bmatrix}a & b\ &|\ 1 & 0 \\0 & 1 \ &|\ -\frac{c}{ad-bc} & \frac{a}{ad-bc}\end{bmatrix}\\ &\Leftrightarrow \begin{bmatrix}a & 0\ &|\ \frac{ad}{ad-bc} & \frac{-ba}{ad-bc} \\0 & 1 \ &|\ \frac{- c}{ad-bc} & \frac{a}{ad-bc}\end{bmatrix} \Leftrightarrow \begin{bmatrix}1 & 0\ &|\ \frac{d}{ad-bc} & \frac {-b}{ad-bc} \\0 & 1 \ &|\ \frac{-c}{ad-bc} & \frac{a}{ad-bc}\end{bmatrix}\end{align} $$ 9{-1} = \frac{1}{ad — bc}\begin{bmatrix}d & -b\ \\-c & a \ \end{bmatrix}$$
$\endgroup$
3
$\begingroup$
Доказательство того, что ваше выражение действительно является обратным к $\;A\;$, довольно простое.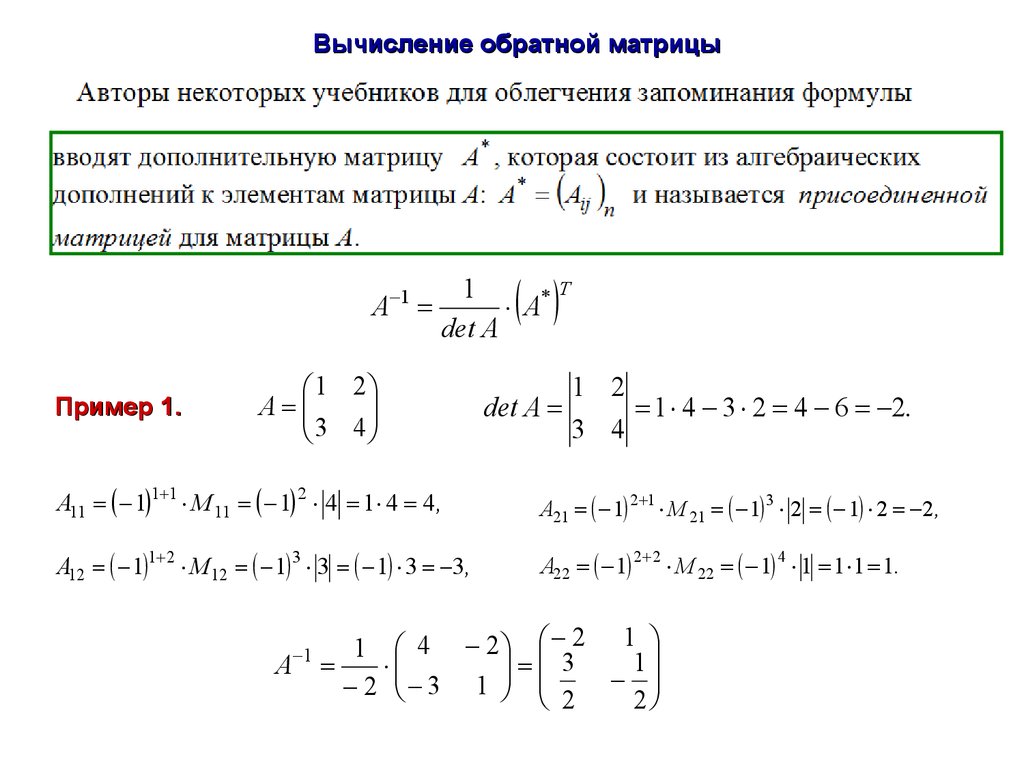 Как это производное можно сделать следующим образом без глубоких познаний в теории матриц:
Как это производное можно сделать следующим образом без глубоких познаний в теории матриц:
$$\begin{pmatrix}a&b\\c&d\end{pmatrix}\begin{pmatrix}x&y\\z&w\end{pmatrix} =\begin{pmatrix}1&0\\0&1\end{pmatrix}\iff$$
$$\begin{align}&ax&&+bz&&=1\\ &&ay&&+bw&=0\\ &cx&&+dz&&=0\\ &&cy&&+dw&=1\end{align}$$
Умножьте второе уравнение на $\;-c\;$ и четвертое на $\;a\;$ и сложите их, чтобы получить:
$$(-bc +ad)w=a\ подразумевает w=\frac1{ad-bc}a$$
и т. д. с остальными неизвестными.
$\endgroup$
1
$\begingroup$ 9{-1}=I$
$\begin{bmatrix} x_{11} &x_{12} \\ x_{21}&x_{22} \end{bmatrix}\begin{bmatrix} a & b \\ c & d \end{bmatrix}=\begin{bmatrix} 1&0 \\ 0&1 \end{bmatrix}$
$ax_{11}+cx_{12} = 1$
$ax_{21}+cx_{22} = 0 $
$bx_{11}+dx_{12} = 0$
$bx_{21}+dx_{22} = 1$
$b(ax_{11}+cx_{12}) = abx_{11}+ bcx_{12}=b$
$a(bx_{11}+dx_{12}) = abx_{11}+adx_{12}=0$
$(abx_{11}+adx_{12})-(abx_ {11}+bcx_{12})=-b$
$x_{12}(ad-bc)=-b$
Строка 1 Столбец 2: $x_{12} =$ $-b\over{ad-bc }$
$b(ax_{21}+cx_{22}) = abx_{21}+bcx_{22}=0$
$a(bx_{21}+dx_{22}) = abx_{21}+adx_{ 22}=a$
$(abx_{21}+adx_{22})-(abx_{21}+bcx_{22})=a$
$x_{22}(ad-bc)=a$
Строка 2 Столбец 2: $x_{22} = $$a \over ad-bc$
$d(ax_{11}+cx_{12}) = adx_{11}+cdx_{12}=d$
$c( bx_{11}+dx_{12}) = bcx_{11}+cdx_{12}=0$
$(adx_{11}+cdx_{12})-(bcx_{11}+cdx_{12})=d $
$x_{11}(ad-bc)=d$
Строка 1 Столбец 1: $x_{11} = $$d\over ad-bc$
$d(ax_{21}+cx_{22} ) = adx_{21}+cdx_{22}=0$ 9{-1}= \begin{bmatrix} \frac{d}{detA} & \frac{-b}{detA}\\ \frac{-c}{detA}& \frac{a}{detA} \end {бматрица} = \frac{1}{detA}\begin{bmatrix} d & -b\\ -c & a \end{bmatrix} $$
Мой первый ответ был нечитаем из-за отсутствия форматирования, надеюсь, эта новая версия поможет!
$\endgroup$
1
Обратная матрица — формула, примеры, свойства и часто задаваемые вопросы
Обратная матрица требуется для решения сложных задач с использованием матричных операций.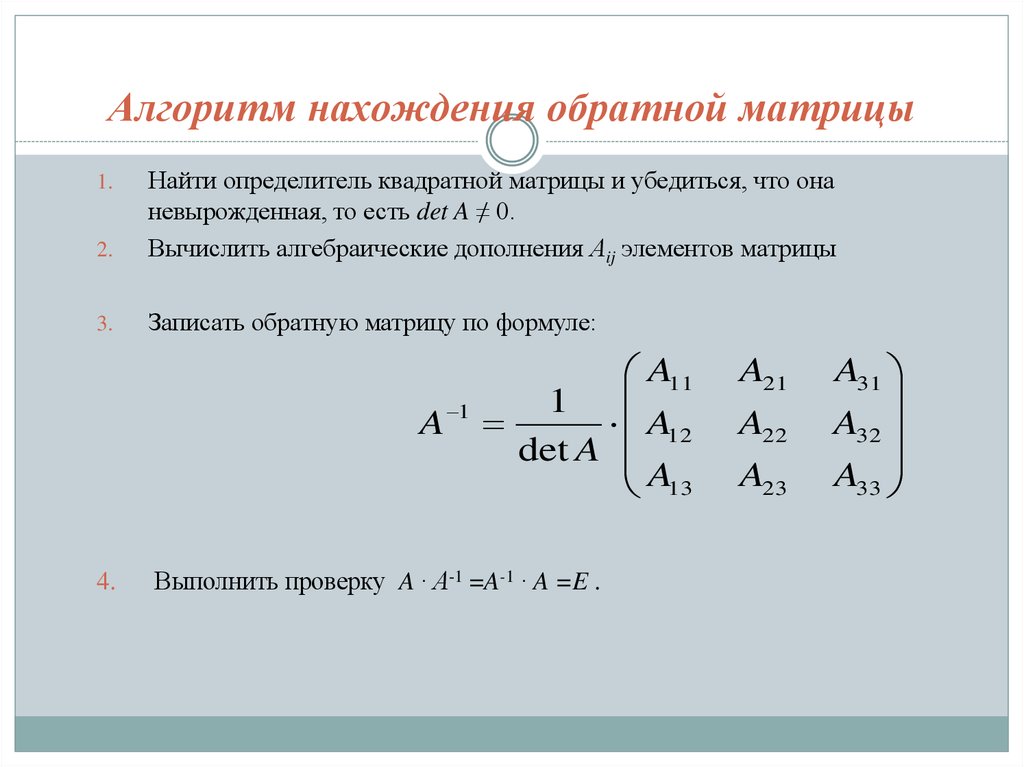 Для любой матрицы A ее обратную обозначают как A -1 . Матрица представляет собой прямоугольный массив чисел, разделенный на строки и столбцы. Это набор чисел, организованных в определенное количество строк и столбцов. Количество строк и столбцов в матрице называется ее размерностью или порядком. Матрица иллюстрируется массивом чисел ниже.
Для любой матрицы A ее обратную обозначают как A -1 . Матрица представляет собой прямоугольный массив чисел, разделенный на строки и столбцы. Это набор чисел, организованных в определенное количество строк и столбцов. Количество строк и столбцов в матрице называется ее размерностью или порядком. Матрица иллюстрируется массивом чисел ниже.
По соглашению сначала в списке указываются строки, а затем столбцы. Таким образом, порядок рассмотренной выше матрицы равен 4 х 3, что указывает на то, что она содержит 4 строки и 3 столбца. Элементы матрицы — это числа, которые появляются в строках и столбцах матрицы. Элемент в первом столбце первой строки в приведенной выше матрице равен 1; элемент во втором столбце первой строки равен 2; и так далее.
Обратная матрица
Обратная матрица — это другая матрица, умножение которой на заданную матрицу дает мультипликативное тождество. Для матрицы A и ее обратной матрицы A -1 свойство идентичности выполняется.
A.A -1 = A -1 A = I
, где I — единичная матрица.
Термин, относящийся к обратной матрице
Приведенная ниже терминология может помочь вам понять обратную матрицу более четко и легко.
- Минор: Минор определяется для каждого матричного элемента. Определитель, полученный после удаления строки и столбца, содержащих этот элемент, является минором этого элемента. Для матрицы минор первого элемента 1 равен .
- Кофактор: Кофактор элемента вычисляется путем умножения минора с -1 на показатель степени суммы элементов строки и столбца в представлении порядка элемента.
Кофактор ij = (-1) i+j M ij
where M ij is the minor of that element
- Determinant: The matrix’s determinant is equal to the sum произведения элементов и их сомножителей определенной строки или столбца матрицы.

- Сопряженная матрица: Сопряженная матрица является транспонированной матрицей кофакторов.

Обратная формула матрицы
Обратная матрица A, то есть A -1 , вычисляется по формуле обратной матрицы, которая включает в себя деление сопряженной матрицы на ее определитель.
где,
adj A = сопряжение матрицы A
|A| = определитель матрицы A
Как найти обратную матрицу?
Обратная матрица A может быть вычислена следующим образом:
Шаг 1: Определите миноры всех элементов A.
Шаг 2: Затем вычислите кофакторы всех элементов и постройте матрицу кофакторов, заменив элементы A соответствующими кофакторами.
Шаг 3: Транспонируйте матрицу кофакторов A, чтобы найти ее сопряженную (записывается как adj A).
Шаг 4: Умножить adj A на обратную величину определителя A.
Теперь для любой невырожденной матрицы A
A -1 = 1 / |А| × Adj (A)
Пример. Найдите обратную матрицу , используя формулу.
У нас есть,
Найдите сопряженную матрицу A, вычислив кофакторы каждого элемента, а затем получив транспонированную матрицу кофакторов.
прил A =
Найдите значение определителя матрицы.
|А| = 4(18–25) – 3(54–5) + 8(30–2)
= 49
Итак, обратная матрица:
A –1 =
=
Методы нахождения обратной матрицы
Обратную матрицу можно найти различными способами. Все методы дают одинаковый результат, некоторые из методов обсуждаются ниже в этой статье,
Метод 1 (метод детерминанта):
Самый важный метод нахождения обратной матрицы — использование определителя. Этот метод обсуждается ниже. :
Обратная матрица также находится с помощью следующего уравнения:
A -1 = adj(A) / det(A)
где
adj(A) — сопряженное к матрице A,
det(A) — определитель матрицы A матрица A.

Для нахождения сопряжения матрицы A требуется кофактор матрицы A. Тогда сопряженный (A) транспонирован матрице кофакторов A, т.е.
adj (A) = [C ij ] T
Для кофактора матрицы C ij используйте данную формулу:
Cij = (-1) i+j det (M ij )
где M ij относится к (i, j) -й -й младшей строке и 903-й 0-й матрице j -й столбец удален.
Метод 2 (метод элементарного преобразования):
Обратная любая матрица также может быть найдена с помощью элементарных операций. Есть две элементарные операции, которые используются для нахождения обратной матрицы. Возьмем три матрицы A, B и X, такие как X = AB. Для нахождения обратной матрицы мы преобразуем данную матрицу в единичную матрицу.
Для обратной матрицы A, когда A -1 существует, то для определения A -1 с помощью элементарных операций выполните следующие шаги:
- Запишите данную матрицу в виде A = IA, где I — единичная матрица. того же порядка, что и A.
- Используйте последовательность операций либо со строками, либо со столбцами, пока не будет получена единичная матрица в левой части. Также используйте аналогичные элементарные операции в правой части, чтобы получить I = BA. Таким образом, матрица B на RHS является обратной матрице A.
- Убедитесь, что мы используем операции со строками или операции со столбцами при выполнении элементарных операций.
 того же порядка, что и A.
того же порядка, что и A.Обратная матрица 2 × 2
Обратная матрица 2 × 2 также может быть вычислена с помощью сокращенного метода, кроме метода, описанного выше. Используйте шаги, указанные ниже, чтобы получить определитель матрицы 2 × 2.
Для заданной матрицы A =
|A| = (ad – bc)
adj A =
, тогда A -1 = (1 / |A|) × Adj A, т. е.
A -1 =
Таким образом, вычисляется обратная матрица 2 × 2.
Обратная матрица 3 × 3
Обратная матрица 3 × 3 вычисляется с использованием описанных выше методов. Возьмем любую матрицу 3 × 3 A =
Возьмем любую матрицу 3 × 3 A =
. Ее обратная матрица 3 × 3 вычисляется по формуле обратной матрицы: Обратная матрица
Определитель обратной обратимой матрицы является обратной величиной определителя исходной матрицы. т. е.
det(A -1 ) = 1 / det(A)
Доказательство этого утверждения обсуждается ниже:
det(A × B) = det (A) × det(B) (уже известно)
A × A -1 = I (по свойству обратной матрицы)
det(A × A -1 ) = det(I)
det(A) × det(A — 1 ) = det(I) [но, det(I) = 1]
det(A) × det(A -1 ) = 1
det(A -1 ) = 1 / det( А)
Доказано.
Свойства обратной матрицы
Важные свойства обратной матрицы обсуждаются ниже. Для любых двух невырожденных матриц A и B (AB) -1 = B -1 A -1
Также проверьте
- Как найти определитель матрицы?
- Определитель матрицы
Решенный пример обратной матрицы
Пример 1. Найдите обратную матрицу по формуле.
Решение:
У нас есть,
Найдите сопряженную матрицу A, вычислив кофакторы каждого элемента, а затем получив транспонирование матрицы кофакторов.
adj A =
Найдите значение определителя матрицы.
|А| = 2(4–6) – 3(4–4) + 1(3–2)
= –3
Итак, обратная матрица:
A –1 =
=
Пример 2. Найдите обратную матрицу A= , используя формулу.
Решение:
У нас есть,
A =
Найдите сопряженную матрицу A, вычислив кофакторы каждого элемента, а затем получив транспонирование матрицы кофакторов.
adj A =
Найдите значение определителя матрицы.
|А| = 6(0–4) – 2(0–8) + 3(0–0)
= 16
Итак, обратная матрица:
A –1 =
=

Пример 3. Найдите обратную матрицу A= , используя формулу.
Решение:
У нас есть,
A =
Найдите сопряженную матрицу A, вычислив кофакторы каждого элемента, а затем получив транспонирование матрицы кофакторов.
adj A =
Найдите значение определителя матрицы.
|А| = 1(1–0) – 2(0–0) + 3(0–0)
= 1
Итак, обратная матрица:
A –1 =
=
Пример 4. Найдите обратную матрицу A= , используя формулу.
Решение:
У нас есть,
A =
Найдите сопряженную матрицу A, вычислив кофакторы каждого элемента, а затем получив транспонирование матрицы кофакторов.
adj A =
Найдите значение определителя матрицы.
|А| = 1(1–16) – 2(2–12) + 3(8–3)
= 20
Итак, обратная матрица:
A –1 =
=
Пример 5. Найдите обратную матрицу A= , используя формулу.
Решение:
У нас есть,
A =
Найдите сопряженную матрицу A, вычислив кофакторы каждого элемента, а затем получив транспонирование матрицы кофакторов.
прил A =
Найдите значение определителя матрицы.
|А| = 2(0–3) – 3(0–3) + 4(1–2)
= –1
Итак, обратная матрица:
A –1 =
=
Пример 6. Найдите обратную матрицу A= , используя формулу.
Решение:
У нас есть,
A =
Найдите сопряженную матрицу A, вычислив кофакторы каждого элемента, а затем получив транспонирование матрицы кофакторов.
adj A =
Найдите значение определителя матрицы.
|А| = 3(63–81) – 5(45–72) + 7(45–56)
= 4
Итак, обратная матрица:
A –1 =
=
Часто задаваемые вопросы об обратной матрице
Вопрос 1: Что такое обратная матрица?Ответ:
Вопрос 2: Что является обратной матрицей 3×3?Обратная матрица называется обратной матрицей. Только квадратные матрицы с ненулевыми определителями обратимы. Предположим, что для любой квадратной матрицы A с обратной матрицей B их произведение всегда является единичной матрицей (I) того же порядка.
[A]×[B] = [I]
Ответ:
Обратной любой квадратной матрице 3×3 (скажем, A) является матрица того же порядка, обозначаемая A -1 , что их произведение является единичной матрицей порядка 3×3 .
