
ОглавлениеВВЕДЕНИЕЧАСТЬ ПЕРВАЯ. ВЕКТОРНАЯ АЛГЕБРА Глава I. ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ 2. Скаляры и векторы. 3. Равенство векторов. 4.  Скользящие и приложенные векторные величины. Скользящие и приложенные векторные величины.6. Орт вектора. 7. Угол между двумя векторами. § 2. Сложение векторов 1. Сложение двух векторов. 2. Сложение более чем двух векторов. 3. Модуль суммы. 4. Законы сложения. § 3. Вычитание векторов § 4. Умножение и деление вектора на скаляр 2. Законы умножения вектора на скаляр. 3. Деление вектора на скаляр. 4. Выражение вектора через его модуль и орт. § 5. Линейные зависимости между векторами 2. Коллинеарные векторы. 3. Компланарные векторы. 4. Разложение вектора по трем некомпланарным векторам. 5. Метод координат. Глава II. ТЕОРИЯ ПРОЕКЦИЙ. ПРЯМОУГОЛЬНЫЕ КООРДИНАТЫ § 1. Проекции векторов на ось § 2. Основные теоремы о скалярных проекциях § 3. Прямоугольная система координат в пространстве 1. Правая и левая прямоугольные системы координат. 2. Разложение вектора по ортам осей 3. Линейные операции над векторами в координатной форме. 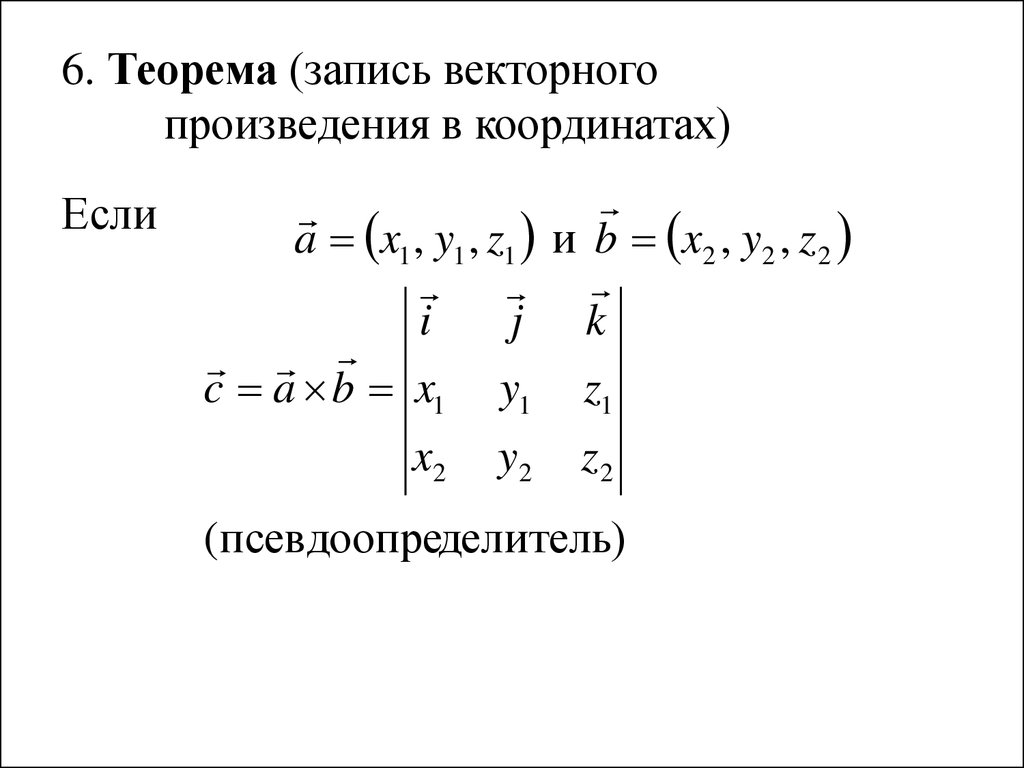 4. Радиус-вектор и координаты точки. 5. Определение вектора по его началу и концу. 6. Деление отрезка в данном отношении. Глава III. ПРОИЗВЕДЕНИЯ ДВУХ ВЕКТОРОВ § 1. Скалярное произведение двух векторов 2. Работа силы. 3. Определение. 4. Равенство скалярного произведения нулю. 5. Законы скалярного умножения. 7. Скалярные произведения координатных ортов. 8. Скалярное произведение в координатной форме. 9. Неопределенность действия, обратного скалярному умножению. § 2. Векторное произведение двух векторов 3. Условия равенства нулю векторного произведения. 4. Законы векторного умножения. 5. Векторные произведения координатных ортов. 6. Определители. 7. Векторное произведение в координатной форме. 8. Неопределенность действия, обратного векторному умножению. Глава IV. ПРОИЗВЕДЕНИЯ ТРЕХ ВЕКТОРОВ § 2. Векторно-векторное произведение трех векторов 3. Правило разложения векторно-векторного произведения.  § 3. Векторно-скалярное произведение трех векторов 2. Законы векторно-скалярного умножения 3. Обращение в нуль векторно-скалярного произведения трех векторов. 4. Векторно-скалярное произведение в координатной форме. § 4. Выражение векторно-скалярного произведения через скалярные произведения Глава V. ФУНКЦИИ ВЕКТОРОВ § 1. Произведения четырех векторов 2. Выражение скалярного произведения двух векторных произведений (а x b), (р x q) через скалярные произведения. 3. Разложение вектора (а, b, с) R по трем векторам a, b, c. 4. Разложение вектора (a, b, c) по векторным произведениям b x с, c x a, а x b § 2. Произведения пяти и шести векторов 2. Разложение вектора (a, b, c) (m x n) по векторам a, b, c. 3. Выражение произведения двух смешанных произведений (a, b, c) (l, m, n) через скалярные произведения. § 3. Основные теоремы о функциях векторов 1. Рациональные функции векторов. 2. Элементарные функции векторов. 3. Произвольные скалярные функции от векторов. 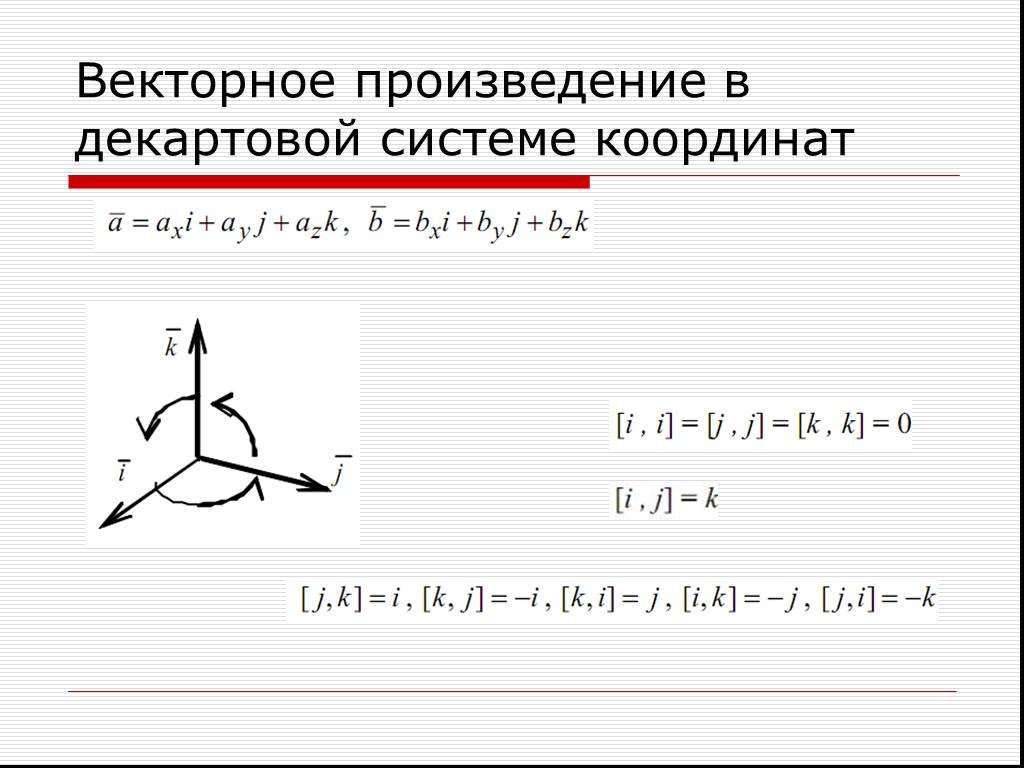 4. Произвольные векторные функции векторов. Глава VI. ОСНОВНЫЕ ЗАДАЧИ § 2. Основные задачи, связанные со скалярным умножением векторов § 3. Основные задачи, связанные с векторным умножением векторов § 4. Основные задачи, связанные с произведениями трех и более векторов § 5. Простейшие векторные уравнения § 6. Геометрические инварианты фигур 2. Треугольник. 3. Полные системы инвариантов треугольника. 4. Тетраэдр. 5. Полные системы инвариантов тетраэдра. 6. Гексаэдр с треугольными гранями. ЧАСТЬ ВТОРАЯ. ДИФФЕРЕНЦИАЛЬНАЯ ГЕОМЕТРИЯ 2. Вектор-функция в координатной форме. 3. Годограф вектора. 4. Предел вектора. § 2. Дифференцирование вектора по скаляру 2. Геометрический смысл производной вектора по скаляру. 3. Механический смысл производной. 5. Дифференциал вектора. 6. Инвариантность дифференциала. 7. Связь дифференциала вектора с его приращением. § 3. Формула Тейлора Глава VIII.  ДИФФЕРЕНЦИАЛЬНАЯ ГЕОМЕТРИЯ ЛИНИИ В ПРОСТРАНСТВЕ ДИФФЕРЕНЦИАЛЬНАЯ ГЕОМЕТРИЯ ЛИНИИ В ПРОСТРАНСТВЕ§ 1. Основные дифференциально-геометрические понятия, связанные с линией 2. Касательная. 3. Соприкасающаяся плоскость. 4. Главная нормаль и бинормаль. 5. Кривизна. 6. Кручение. 7. Длина дуги. § 2. Основные формулы дифференциальной геометрии линий в пространстве 1. Дуга как параметр. Дифференциал дуги. 2. Орт касательной. Первая основная формула. 3. Инвариантность геометрических понятий. 4. Главная нормаль и кривизна. Вторая основная формула. 5. Бинормаль и кручение. Третья основная формула. 6. Винтовая линия. § 3. Сопровождающий трехгранник 2. Система дифференциальных уравнений движения сопровождающего трехгранника. 3. Расположение линии относительно сопровождающего трехгранника. 4. Линии без кривизны. 5. Линии без кручения. § 4. Инвариантные формулы Глава IX. ПЛОСКИЕ ЛИНИИ § 1. Дифференциальные уравнения плоской линии § 2. Кривизна плоской линии § 3. 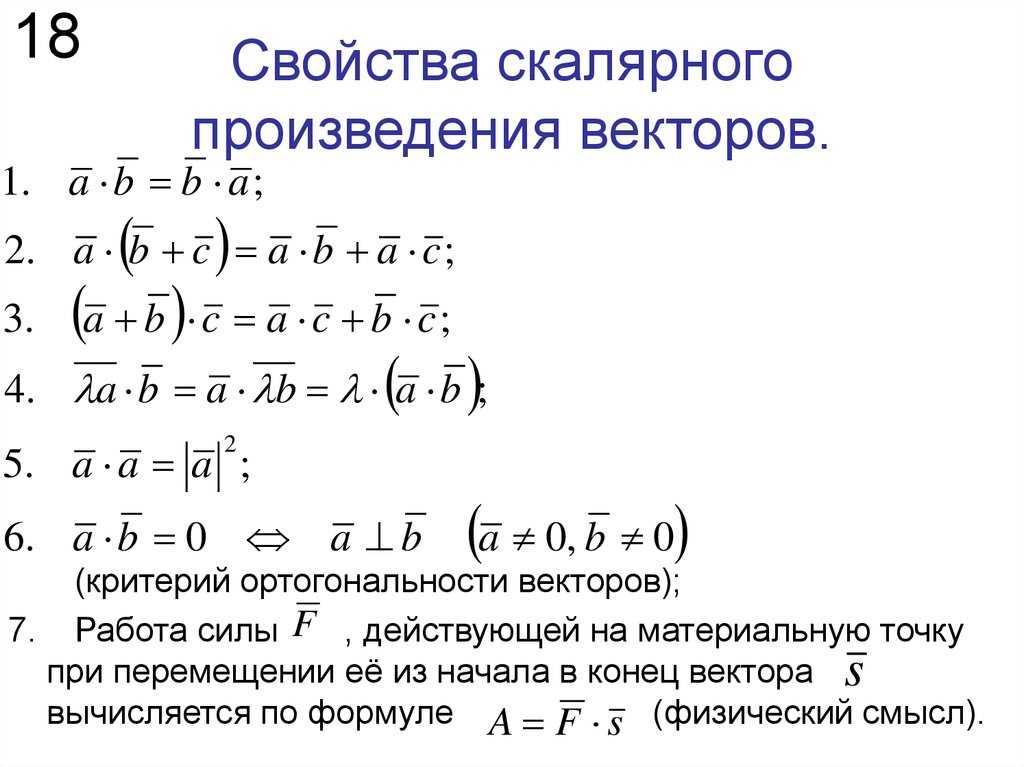 Круг кривизны Круг кривизны§ 4. Эволюта § 5. Эвольвента Глава X. ПРИЛОЖЕНИЯ К МЕХАНИКЕ § 1. Скорость и ускорение точки § 2. Движение твердого тела вокруг неподвижной точки 2. Формула Эйлера. 3. Угловая скорость. 4. Доказательстве существования угловой скорости твердого тела. 2. Абсолютная и относительная производные вектора. 3. Общий случай движения твердого тела. Глава XI. ДИФФЕРЕНЦИАЛЬНАЯ ГЕОМЕТРИЯ ПОВЕРХНОСТИ § 1. Векторные функции нескольких скалярных аргументов § 2. Параметризованная поверхность 2. Поверхность в декартовых координатах. 3. Параметрическая сеть. 4. Линия на параметризованной поверхности. § 3. Касательная плоскость и нормаль 3. Нормальный вектор. 4. Преобразование параметров. § 4. Площадь области на поверхности 2. Площадь области на поверхности. 3. Формула для вычисления площади поверхности, заданной уравнением z=z(x,y). 4. Элемент площади поверхности. 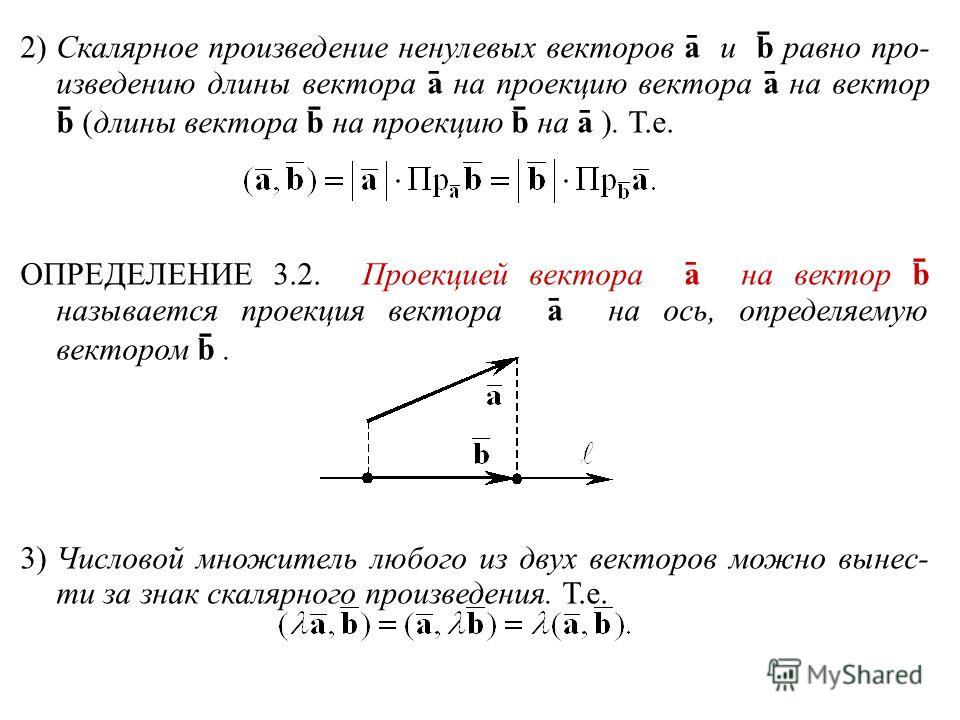 5. Векторный элемент площади поверхности. § 5. Первая квадратичная форма поверхности 2. Внутренняя геометрия поверхности. 3. Длина дуги линии на поверхности. 4. Угол между линиями на поверхности. 5. Площадь области на поверхности. § 6. Вторая квадратичная форма поверхности 2. Нормальная кривизна линии на поверхности. 3. Теорема Менье. § 7. Главные направления и главные кривизны поверхности 2. Главные направления на поверхности. 3. Перпендикулярность главных направлений. 4. Формула Эйлера. 5. Полная и средняя кривизны поверхности. ЧАСТЬ ТРЕТЬЯ. ТЕОРИЯ ПОЛЯ § 1. Функция поля. Поверхности уровня § 2. Градиент поля 2. Первая теорема о градиенте. § 3. Производная по направлению 2. Выражение производной по направлению через градиент. 3. Вторая теорема о градиенте. § 4. Направляющие косинусы нормали поверхности Глава XIII. КРИВОЛИНЕЙНЫЙ И ПОВЕРХНОСТНЫЙ ИНТЕГРАЛЫ § 1. Криволинейный интеграл как определенный интеграл от сложной функции 2.  Криволинейный интеграл от линейной формы по произвольной кривой. Криволинейный интеграл от линейной формы по произвольной кривой.4. Обобщенный криволинейный интеграл. 5. Примеры. § 2. Криволинейный интеграл как предел криволипейной интегральной суммы § 3. Поверхностный интеграл как двойной интеграл от сложной функции 2. Определение простейшего поверхностного интеграла. 3. Поверхностный интеграл от билинейной формы по произвольной поверхности. § 4. Поверхностный интеграл как предел поверхностной интегральной суммы § 5. Поверхностный интеграл в параметрической форме 2. Параметрический поверхностный интеграл. 3. Поверхностный интеграл как предел суммы. § 6. Кратный интеграл как предел обобщенной интегральной суммы 2. Обобщение основной теоремы о кратном интеграле. Глава XIV. ВЕКТОРНОЕ ПОЛЕ И ЕГО ИНТЕГРАЛЬНЫЕ ИНВАРИАНТЫ § 1. Векторное поле § 2. Векторные линии § 3. Циркуляция поля вдоль линии § 4. Поток поля через поверхность Глава XV. 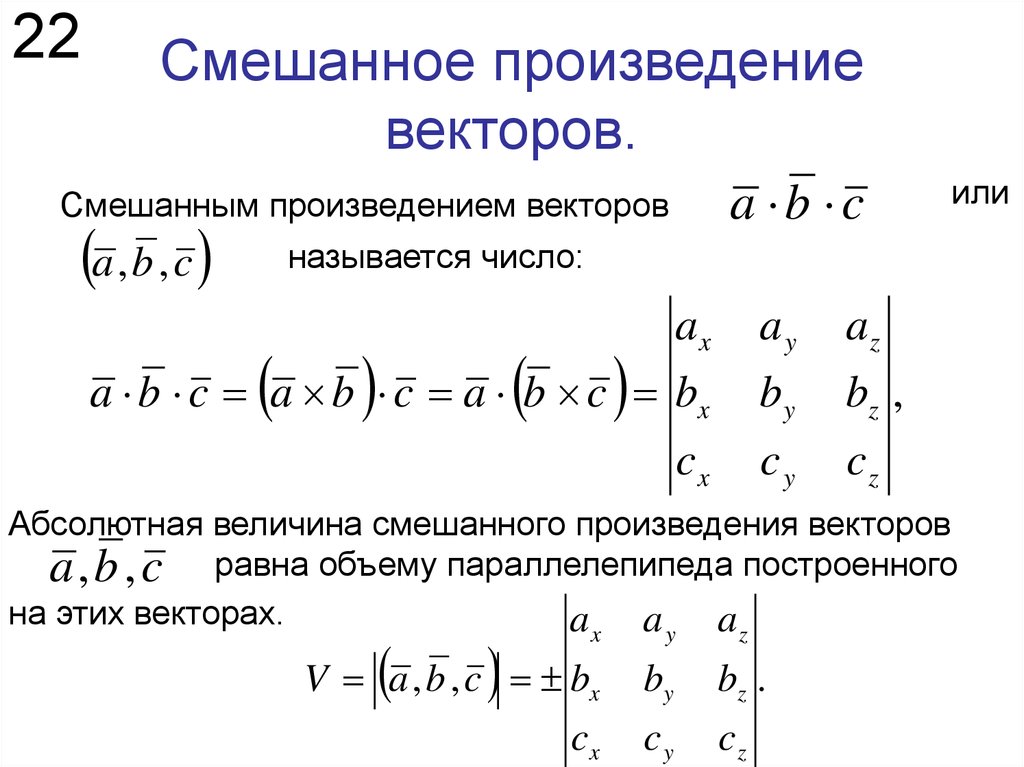 ТЕОРЕМА ОСТРОГРАДСКОГО. ДИВЕРГЕНЦИЯ ПОЛЯ ТЕОРЕМА ОСТРОГРАДСКОГО. ДИВЕРГЕНЦИЯ ПОЛЯ§ 1. Формула Остроградского § 2. Дивергенция поля 2. Дивергенция как предел отношения. 3. Гидромеханический смысл дивергенции. 4. Теорема Остроградского. Глава XVI. ТЕОРЕМА СТОКСА. РОТАЦИЯ ПОЛЯ § 1. Формула Стокса § 2. Ротация поля § 3. Оператор Гамильтона Глава XVII. СПЕЦИАЛЬНЫЕ ВЕКТОРНЫЕ ПОЛЯ § 1. Потенциальное поле 3. Циркуляция потенциального поля по замкнутому контуру. 4. Циркуляция потенциального поля между двумя точками. 5. Потенциал. 6. Элемент циркуляции. 7. Характеристические признаки потенциального поля. 8. Вычисление потенциала. 9. Центральное поле. 10. Вихревые шнуры. § 2. Соленоидальное поле 3. Поток соленоидального поля через замкнутую поверхность. 4. Трубчатое строение соленоидального поля. 5. Векторный потенциал. 6. Характеристические признаки соленоидального поля. § 3. Потенциальное несжимаемое поле Глава XVIII. 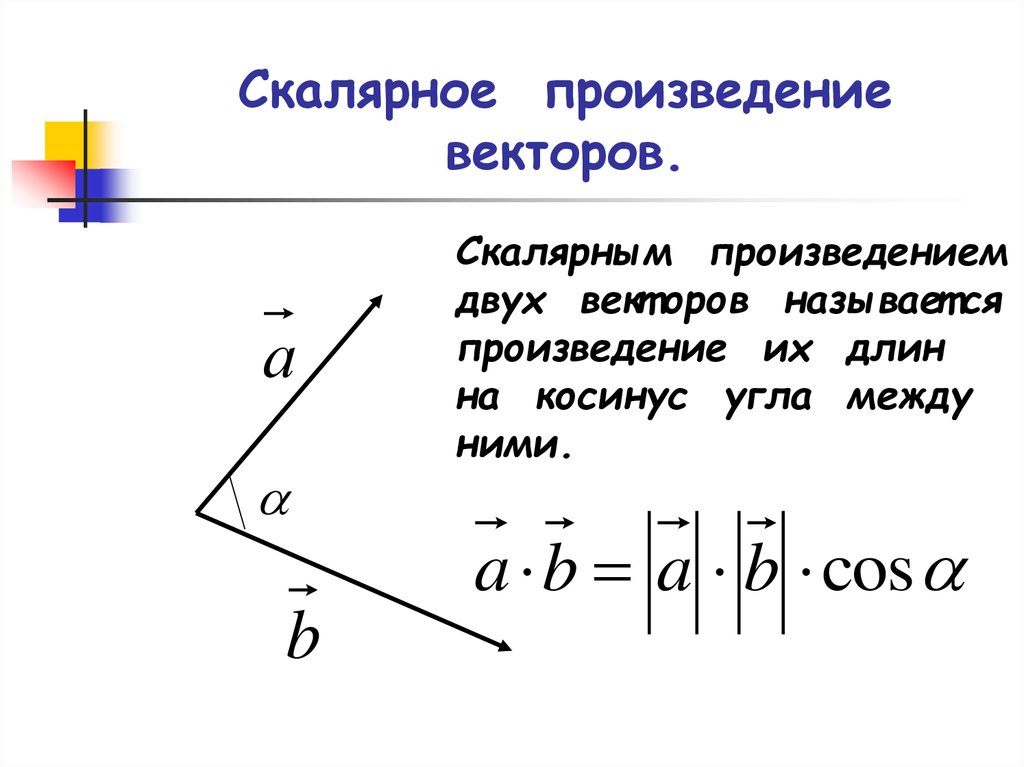 ПРОСТЕЙШИЕ ЭЛЕКТРОМАГНИТНЫЕ ПОЛЯ ПРОСТЕЙШИЕ ЭЛЕКТРОМАГНИТНЫЕ ПОЛЯ§ 1. Электростатическое поле точечного заряда 2. Дивергенция поля точечного заряда. 3. Поток поля точечного заряда через замкнутую поверхность. 4. Ротация поля точечного заряда. 5. Потенциал поля точечного заряда. § 2. Электростатическое поле системы точечных зарядов 2. Дивергенция и ротация поля системы точечных зарядов. 3. Поток поля системы точечных зарядов через замкнутую поверхность. 4. Потенциал поля системы точечных зарядов. 5. Непрерывно распределенный заряд. § 3. Магнитное поле тока 2. Напряженность магнитного поля тока, текущего по бесконечному прямолинейному проводу. 3. Векторные линии поля H. 4. Потенциал поля Н. 5. Провод как вихревой шнур. Глава XIX. ВЕКТОРНОЕ ПОЛЕ В КРИВОЛИНЕЙНЫХ КООРДИНАТАХ § 1. Криволинейные координаты 3. Координатные поверхности и линии. 4. Линейный элемент. 5. Элемент объема. 6. Подвижной репер. 7. Векторное поле в криволиненных координатах. 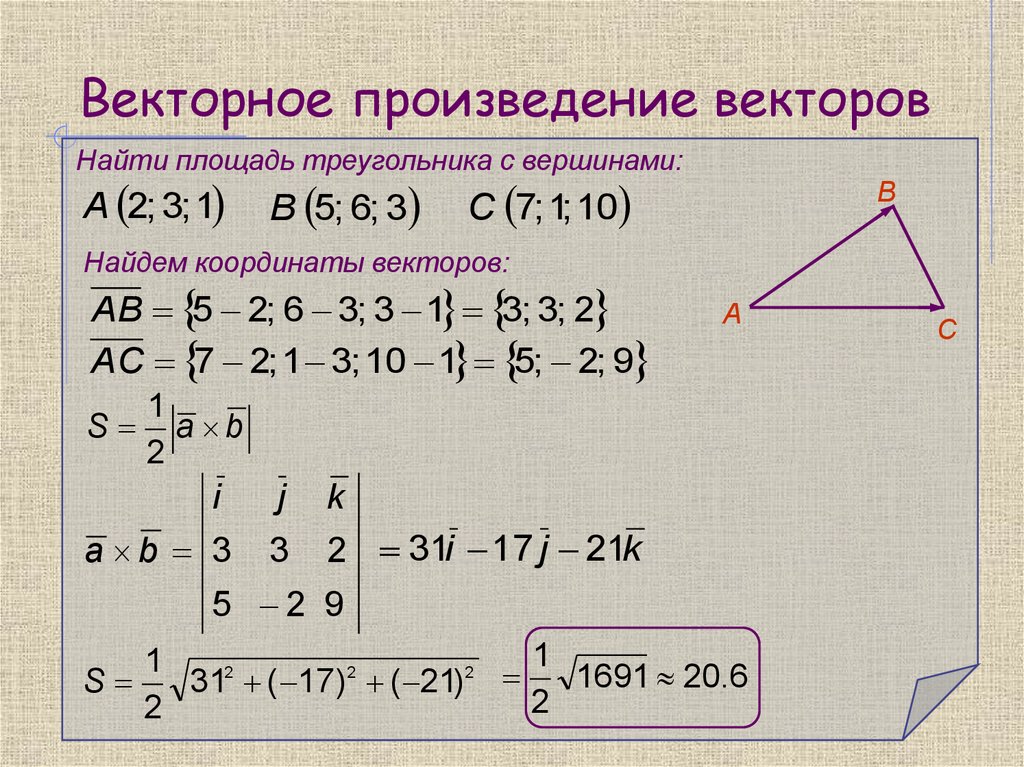 § 2. Дифференциальные операции в криволинейных координатах 2. Дивергенция в криволинейных координатах. 3. Ротация в криволинейных координатах. § 3. Ортогональные координаты § 4. Цилиндрические координаты 2. Линейный элемент и элемент объема в цилиндрических координатах. 3. Дифференциальные операции в цилиндрических координатах. § 5. Сферические координаты |
1.5: Точечное и векторное произведение
- Последнее обновление
- Сохранить как PDF
- Идентификатор страницы
- 603
- Ларри Грин
- Общественный колледж Лейк-Тахо
Если
\[\textbf{v} = a \hat{\textbf{i}} + b \hat{\textbf{j}} + c \hat{\textbf{k}} \; \;\; \текст{и}\;\;\; \textbf{w}= d \hat{\textbf{i}} + e \hat{\textbf{j}} + f \hat{\textbf{k}} \nonumber \]
, затем
\[ \ textbf{v} \cdot \textbf{w} = объявление + быть + ср.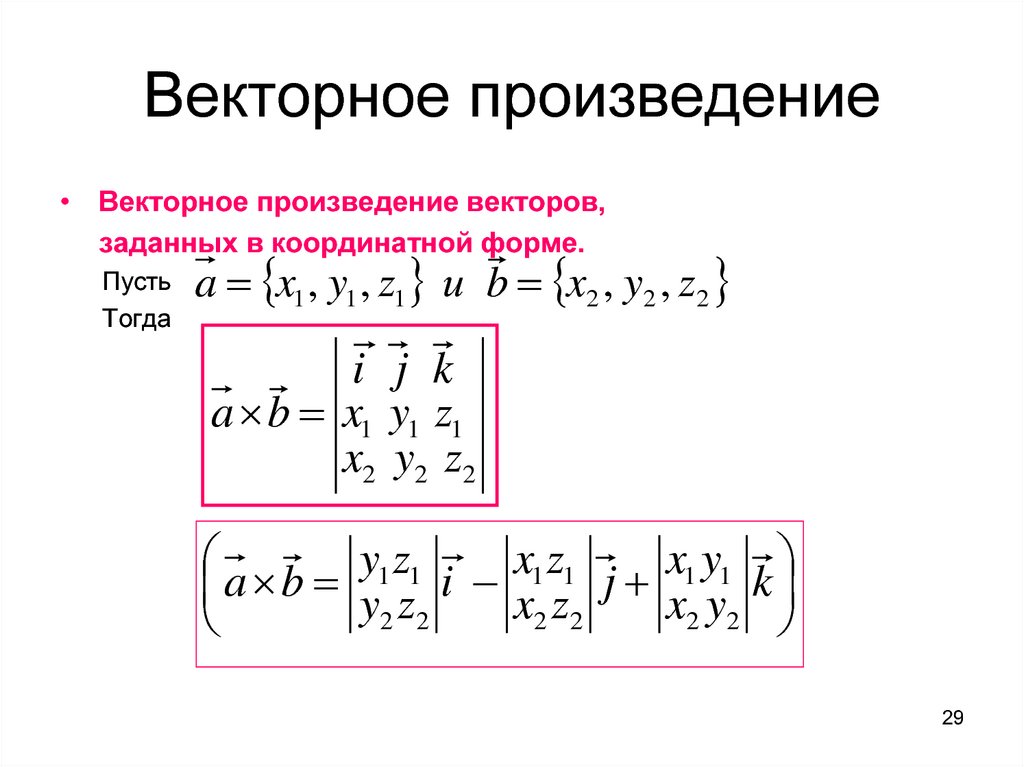 \номер\]
\номер\]
Пример \(\PageIndex{1}\)
Если
\[\textbf{v} = 2\; \ шляпа {\ textbf {я}} + 4 \; \шляпа{\textbf{j}} \;\;\; \текст{и} \;\;\; \textbf{w} = \hat{\textbf{i}} + 5\; \ шляпа {\ textbf {j}} \ не номер \]
, затем
\[ \textbf{v} \cdot \textbf{w} = (2)(1) + (4)(5) = 22. \nonumber \]
Упражнение \(\PageIndex{1}\)
Найдите скалярное произведение \(2 \hat{\textbf{i}}+ \hat{\textbf{j}} — \hat{\textbf{k}} \) и \( \hat{\textbf{i}} + 2 \hat{\textbf{j}} \).
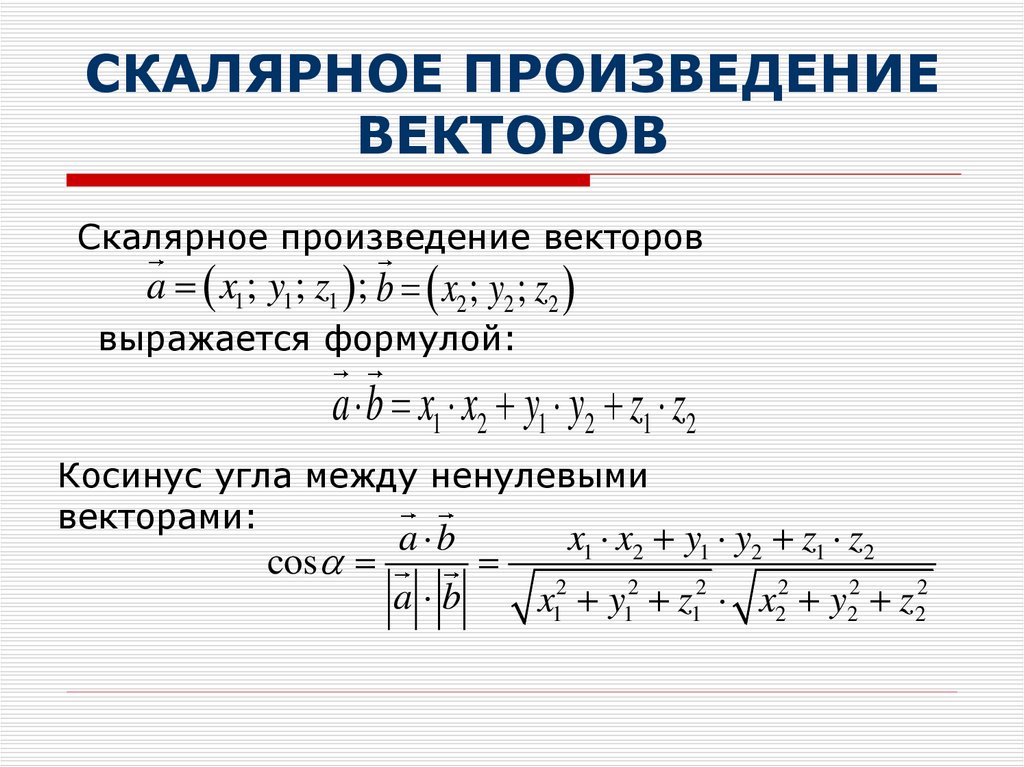
Угол между двумя векторами
Определим угол \(\theta \) между двумя векторами v и w по формуле
\[ \cos q = \dfrac{\textbf{v} \cdot \ textbf{w} }{|| \textbf{v} || || \textbf{ш}|| }\номер \]
, так что
\[ \textbf{v} \cdot \textbf{w} = ||\textbf{v}|| || \textbf{ш} || \cos кв. \nonumber \]
Два вектора называются ортогональными , если их угол прямой. Мы видим, что углы ортогональны тогда и только тогда, когда
\[ \textbf{v} \cdot \textbf{w} = 0.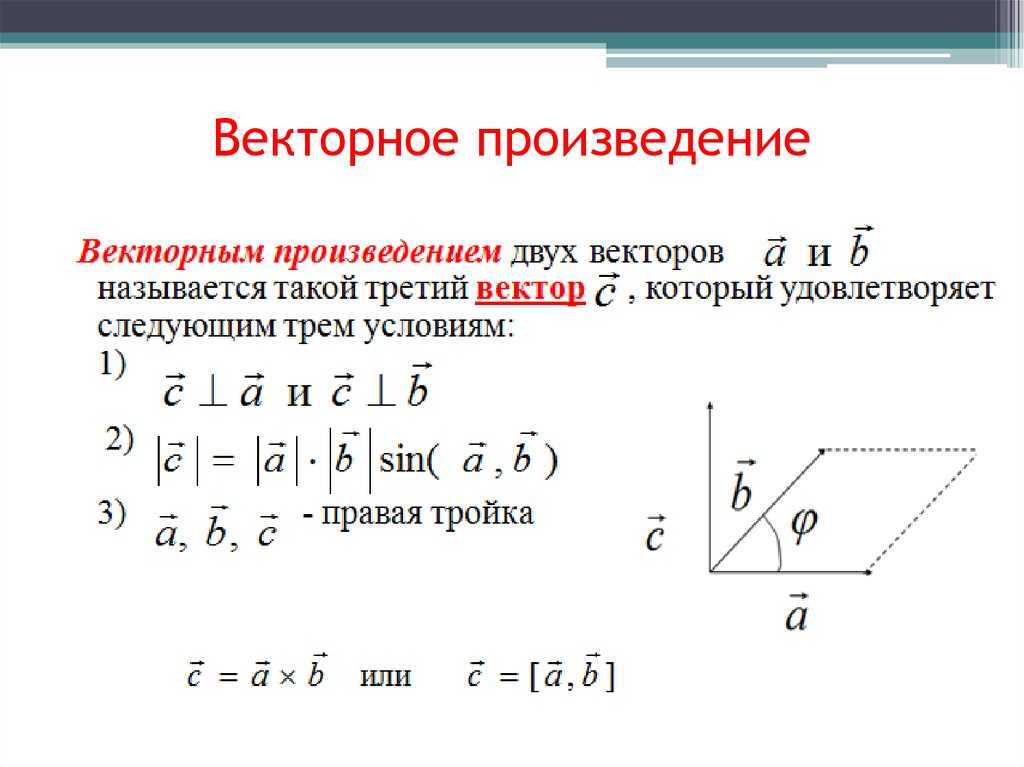 \nonumber \]
\nonumber \]
угол между
\[ \textbf{v} = 2 \hat{\textbf{i}} + 3 \hat{\textbf{j}} + \hat{\textbf{k}} \nonumber \] 9{-1}\left( \dfrac{13}{\sqrt{14} \sqrt{21}} \right). \nonumber \]
Определение: Направленные косинусы
Пусть
\[\textbf{v} = a \hat{\textbf{i}} + b \hat{\textbf{j}} + c \hat{\ textbf{k}} \nonumber \]
вектор, то мы определяем направляющих косинусов следующим образом:
1.
\[ \cos a = \dfrac{a}{||\textbf {v} ||},\nonumber \]
2.
\[\cos b = \dfrac{b}{ ||\textbf{v} || }, \номер\]
3.
\[ \cos c = \dfrac{c}{||\textbf{v}||}. \nonumber \]
Выступы и компоненты Предположим, что автомобиль остановился на крутом холме, и пусть g будет силой тяжести, действующей на него. Мы можем разделить вектор g на составляющую, толкающую машину по дороге, и составляющую, толкающую машину на дорогу. Определим
Определение: Проекция
Пусть u и v будут векторами.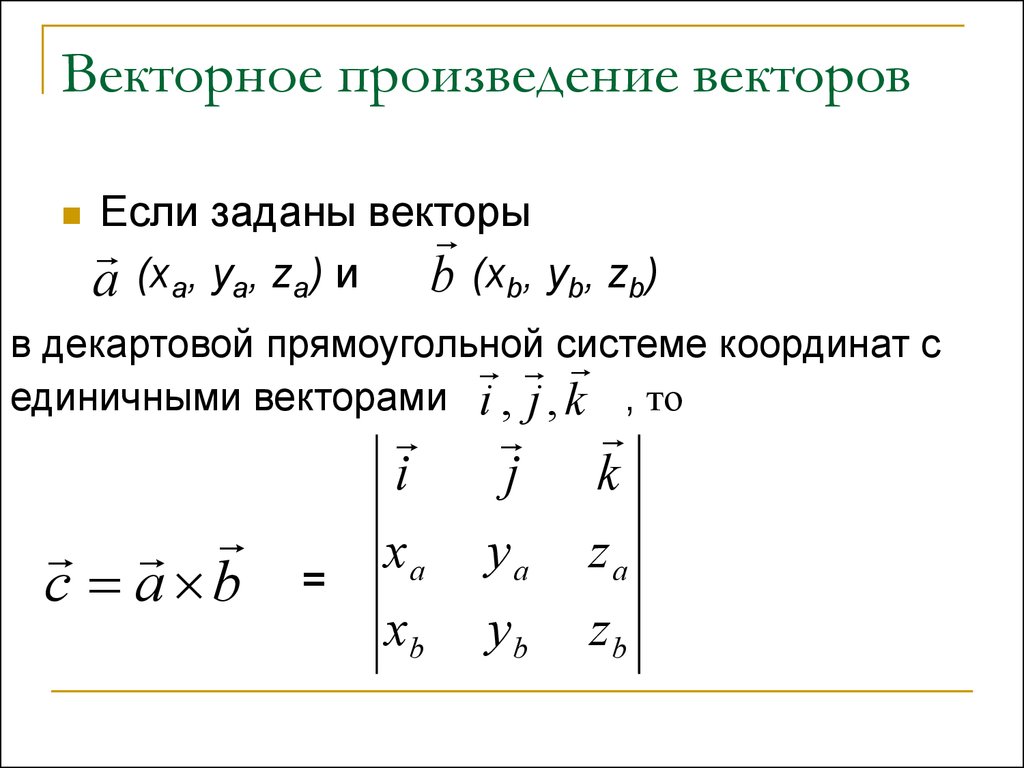 Затем u можно разбить на две составляющие: r и s , так что r параллельно v , а s перпендикулярно v . r называется проекцией u на v и называется компонентой u , перпендикулярной v .
Затем u можно разбить на две составляющие: r и s , так что r параллельно v , а s перпендикулярно v . r называется проекцией u на v и называется компонентой u , перпендикулярной v .
Мы видим, что
\[\begin{align*} \textbf{u} \cdot \textbf{v} = || \textbf{и} || \; || \textbf{v}|| \cos q &= \dfrac{|| \textbf{и} || \; || \textbf{v} || \text{proj}_{\textbf{v}} \textbf{u} }{||\textbf{u}||} \\ &= ||\textbf{v} || \; || \text{proj}_{\textbf{v}} \textbf{u} ||. \end{align*} \nonumber \] 92 } || \textbf{v}|| \nonumber \]
, а правая часть упрощается до приведенной выше формулы. Направление правильное, так как правая часть формулы постоянно кратна v , поэтому вектор проекции имеет направление v , как и требуется.
Чтобы найти вектор s , обратите внимание на диаграмму, что
\[ \text{proj}_{\textbf{v}} \textbf{u} + \textbf{s} = \textbf{u} \ nonumber \]
, так что
\[ \textbf{s} = \textbf{u} — \text{proj}_{ \textbf{v} } \textbf{u}. \номер\]
Работа
Работа, совершенная постоянной силой F вдоль PQ, равна
\[W=\textbf{F}\cdot PQ. \nonumber \]
Пример \(\PageIndex{3}\)
Найдите работу, совершенную против силы тяжести, чтобы переместить 10-килограммового ребенка из точки \((2,3)\) в точку \((5, 7)\)?
Решение
Мы имеем, что вектор силы равен
\[ \textbf{F} = m \textbf{a} = (10 )(-9,8 \hat{\textbf{j}}) = -98 \ шляпа {\ textbf {j}} \ не номер \]
, а вектор смещения равен
\[\textbf{v} = (5-2) \hat{\textbf{i}} + (7-3) \hat{\textbf{j}} = 3 \hat{ \textbf{i}} + 4 \hat{\textbf{j}}.\nonumber \]
Работа представляет собой скалярное произведение
\[\begin{align*} W = \textbf{F} \cdot \ textbf{v} &= (-98 \hat{\textbf{j}} ) \cdot (3 \hat{\textbf{i}} + 4 \hat{\textbf{j}} ) \\ &= (0 )(3) + (-98) (4) \\ &= -392. \end{align*} \nonumber \]
\end{align*} \nonumber \]
Обратите внимание, что отрицательный знак подтверждает, что работа выполняется против силы тяжести. Следовательно, требуется 392 Дж работы по перемещению ребенка.
Крутящий момент
Предположим, вы катаетесь на лыжах и ужасно падаете. Ваше тело вращается, а лыжи остаются на месте (не пытайтесь делать это дома). При правильном креплении ваши крепления отстегнутся, и лыжа оторвется. Крепления распознают, что была применена сила. Эта сила называется крутящим моментом. Чтобы вычислить его, мы используем перекрестное произведение двух векторов, которое не только дает крутящий момент, но и дает направление, перпендикулярное как силе, так и направлению ноги.
Определение: перекрестное произведение
Пусть \(\textbf{u} = a \hat{\textbf{i}} + b \hat{\textbf{j}} + c \hat{\textbf{k}}\ ) и \(\textbf{v} = d \hat{\textbf{i}} + e \hat{\textbf{j}} + f \hat{\textbf{k}} \) — векторы. Затем мы определяем перекрестное произведение \(\textbf{v} \times \textbf{w} \) определителем матрицы:
\[\begin{pmatrix} \hat{\textbf{i}} & \hat{\textbf{j}} &\hat{\textbf{k}} \\ a & b &c \\ d & e & f \end{pmatrix}.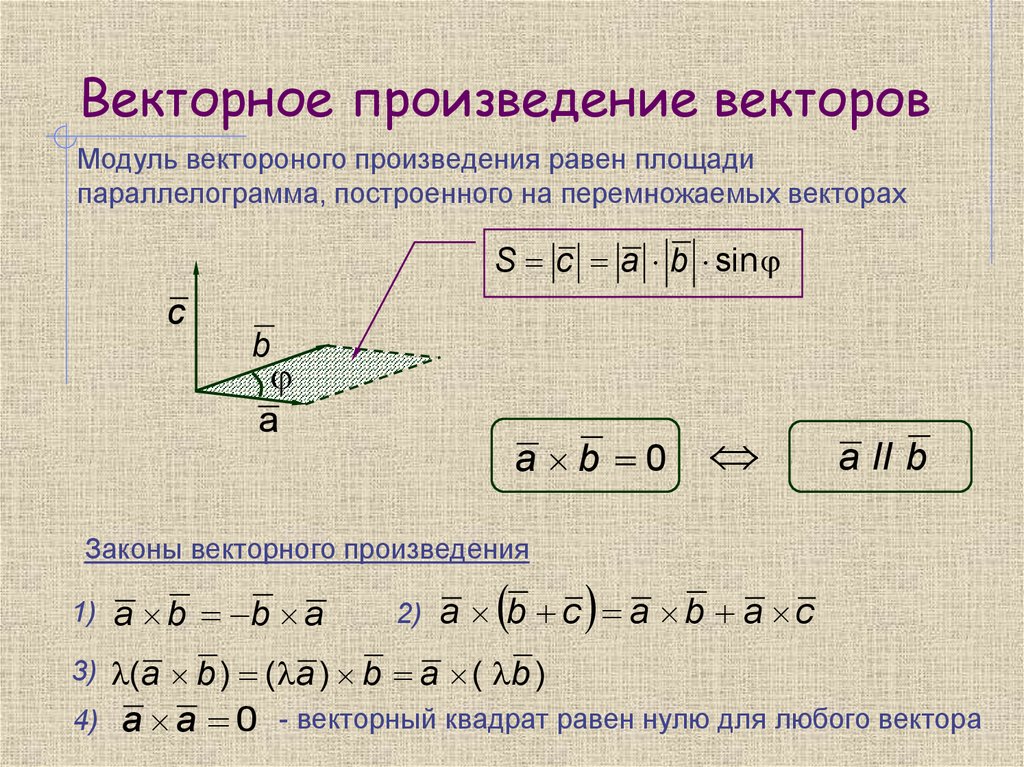 \номер\]
\номер\]
Мы можем вычислить этот определитель как
\[\begin{vmatrix} b & c \\ e & f \end{vmatrix} \hat{\textbf{i}} — \begin{vmatrix} a & c \\ d & f \end{vmatrix} \hat{\textbf{j}} + \begin{vmatrix} a & b \\ d & e \end{vmatrix} \hat{\textbf{k}} \nonumber \]
\[ =(bf — ce) \hat{\textbf{i}} + (cd — af) \hat{\textbf{j}} + (ae — bd)\hat{\textbf{k}}. \nonumber \]
Пример \(\PageIndex{4}\)
Найдите векторное произведение \(\textbf{u} \times \textbf{v} \), если
\[\textbf{u} = 2 \hat{\textbf{i}} + \hat{\textbf{j}} -3 \hat{\textbf{k}}, \;\;\; \textbf{v} = 4 \hat{\textbf{j}} + 5 \hat{\textbf{k}}.\nonumber \]
Решение
Мы вычисляем
\[\begin{align* }\begin{vmatrix} \hat{\textbf{i}} & \hat{\textbf{j}} & \hat{\textbf{k}} \\ 2 & 1 & -3 \\ 0 & 4 & 5 \end{vmatrix} & = \begin{vmatrix} 1 & -3 \\ 4 & 5 \end{vmatrix} \hat{\textbf{i}} — \begin{vmatrix} 2 & -3 \\ 0 & 5 \end{vmatrix} \hat{\textbf{j}} + \begin{vmatrix} 2 & 1 \\ 0 & 4 \end{vmatrix} \hat{\textbf{k}} \\ &= 17 \hat{ \textbf{i}} — 10 \шляпа{\textbf{j}} + 8 \шляпа{\textbf{к}}.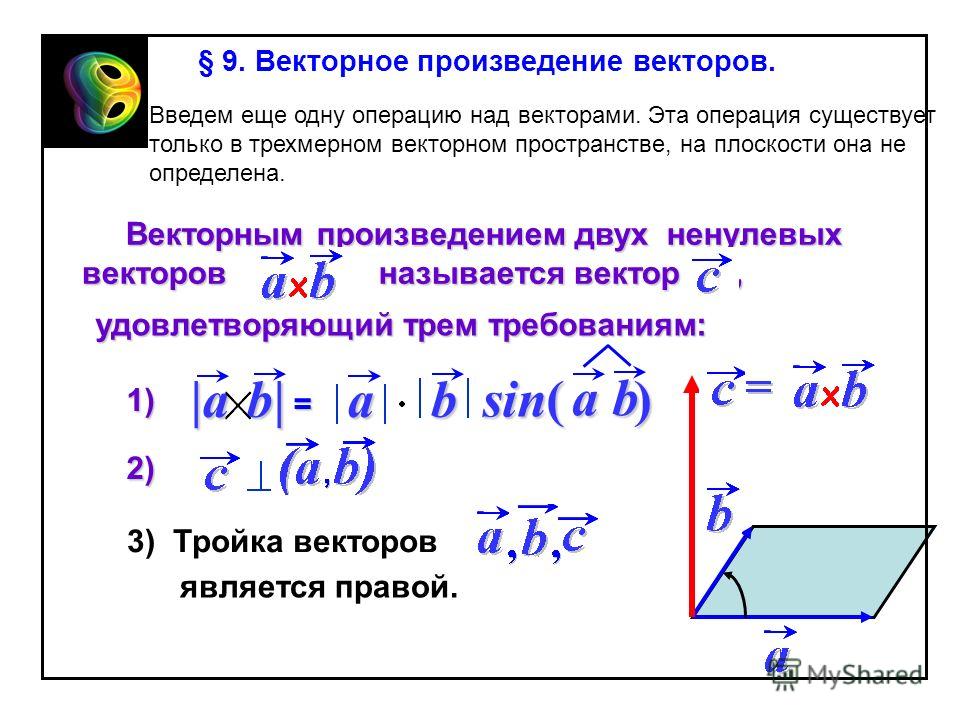 \end{align*} \nonumber \]
\end{align*} \nonumber \]
Если вам нужна дополнительная помощь, см. конспект лекций по математике 103 B по матрицам.
Упражнения
Найдите \(\textbf{u} \times \textbf{v}\), когда
- \(\textbf{u} = 3 \hat{\textbf{i}} + \hat{\textbf {j}} — 2 \hat{\textbf{k}}\), \( \textbf{v} = \hat{\textbf{i}} — \hat{\textbf{k}} \),
- \(\textbf{u} = 2 \hat{\textbf{i}} — 4 \hat{\textbf{j}} — \hat{\textbf{k}} \), \(\textbf{v} = 3 \hat{\textbf{i}} — \hat{\textbf{j}} + 2k \hat{\textbf{k}} \),
Обратите внимание, что поскольку переключение порядка двух строк определителя меняет знак определителя, мы имеем
\[ \textbf{u} \times \textbf{v} = — \textbf{v} \times \textbf{ у}. \nonumber \]
Геометрия и векторное произведение
Пусть u и v — векторы, и рассмотрим параллелограмм, который составляют два вектора.
Затем
\[||\textbf{u} \times \textbf{v} || = \text{Площадь параллелограмма}\nonumber \]
и направление \(\textbf{u} \times \textbf{v}\) является прямым углом к параллелограмму, который следует правилу правой руки.
Примечание. Для \( \hat{\textbf{i}} \times \hat{\textbf{j}}\) величина равна 1, а направление равно \(\hat{\textbf{k}}\) , следовательно, \(\hat{\textbf{i}} \times \hat{\textbf{j}} = \hat{\textbf{k}}\).
Упражнение \(\PageIndex{3}\)
Найдите \(\hat{\textbf{j}} \times \hat{\textbf{k}}\) и \(\hat{\textbf{i} } \times \hat{\textbf{k}}\).
Новый взгляд на крутящий момент
Мы определяем крутящий момент (или момент \(M\) силы \(F\) относительно точки \(Q\)) как
\[M = PQ \times F. \nonumber \]
Пример \(\PageIndex{5}\)
Гаечный ключ на 20 дюймов находится под углом 30 градусов к земле. Сила в 40 фунтов, которая поворачивает ключ под углом 45 градусов к ключу. Найдите крутящий момент.
Решение
Ключ можно записать в виде вектора
\[ 20 \cos 30\; \hat{\textbf{i}} + 20 \sin 30 \; \hat{\textbf{j}} = 17,3 \hat{\textbf{i}} + 10 \hat{\textbf{j}} \nonumber \]
и сила как
\[ -40 \cos 75\; \hat{\textbf{i}} — 40 \sin 75 \; \hat{\textbf{j}} = -10,3 \hat{\textbf{i}} — 38,6 \hat{\textbf{j}}\nonumber \]
, следовательно, крутящий момент представляет собой величину их векторного произведения:
\[\begin{vmatrix} \hat{\textbf{i}} & \hat{\textbf{j}} & \hat{\textbf{k}} \\ 17,3 & 10 & 0 \\ -10,3 & -38,6 & 0 \end{vmatrix}\nonumber \]
\[= -564 \text{дюйм-фунт}.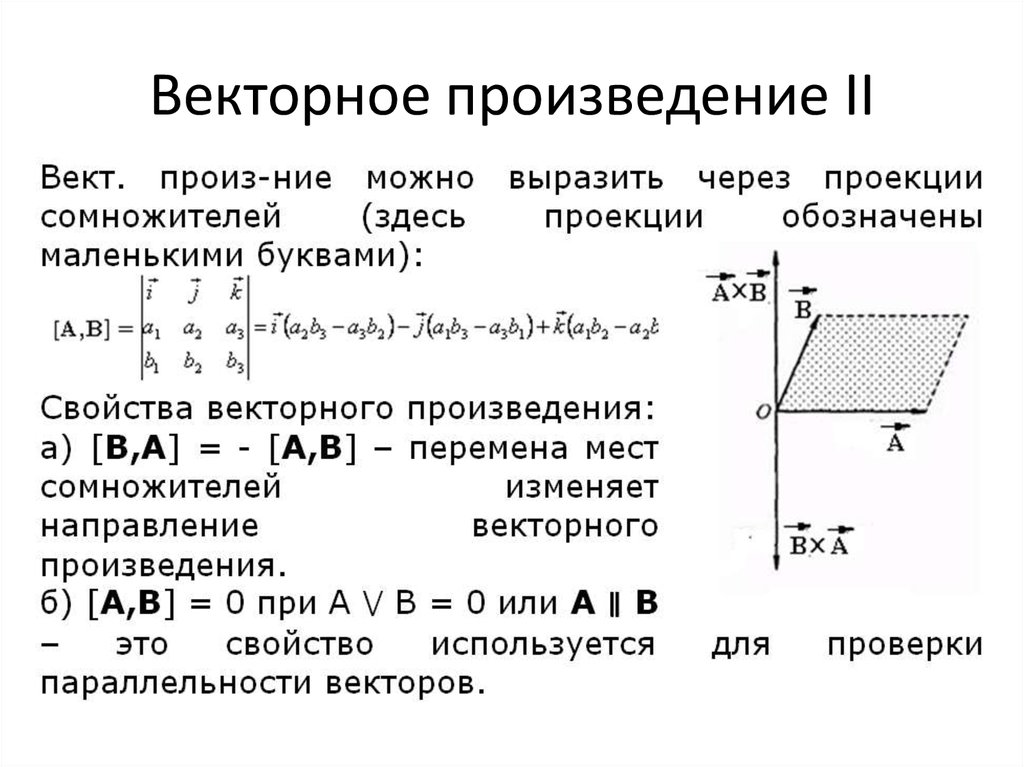 \номер \]
\номер \]
Параллелепипеды
Чтобы найти объем параллелепипеда, натянутого на три вектора u , v и w , находим тройное произведение:
\[\text{Объем}= \textbf{u} \cdot ( \textbf{v} \times \textbf{w}). \nonumber \]
Это можно найти, вычислив определитель трех векторов:
\[\begin{vmatrix} u_1 & v_1 & w_1 \\ u_2 & v_2 & w_2 \\ u_3& v_3 & w_3 \end{vmatrix }.\номер \]
Пример \(\PageIndex{6}\)
Найдите объем параллелепипеда, натянутого на векторы
\[\textbf{u} = <1,0,2>, \;\;\; \textbf{v} = <0,2,3>, \;\;\; \textbf{v} = <0,1,3>.\nonumber \]
Решение
Находим
\[\begin{vmatrix} 1 &0 &2 \\ 0 &2 &3 \\ 0 &1 &3 \end{vmatrix} = 3. \nonumber \]
Авторы и авторство
Эта страница под названием 1.5: The Dot and Cross Product распространяется по незаявленной лицензии и была создана, изменена и/или курирована Ларри Грином.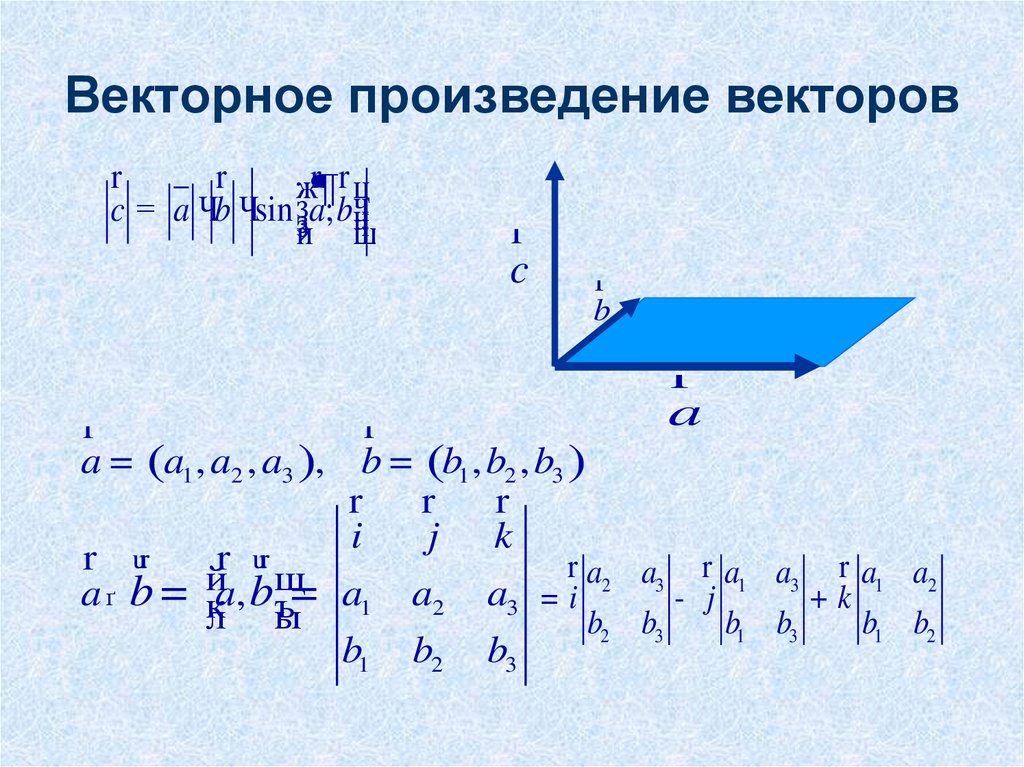
- Наверх
- Была ли эта статья полезной?
- Тип изделия
- Раздел или Страница
- Автор
- Ларри Грин
- Показать страницу TOC
- нет
- Теги
- компоненты
- перекрестное произведение
- НАПРАВЛЕННЫЕ КОСИНУСЫ
- скалярное произведение
- выступ
Карта механики — перекрестное произведение
Перекрестное произведение — это математическая операция, которая может выполняться над любыми двумя трехмерными векторами .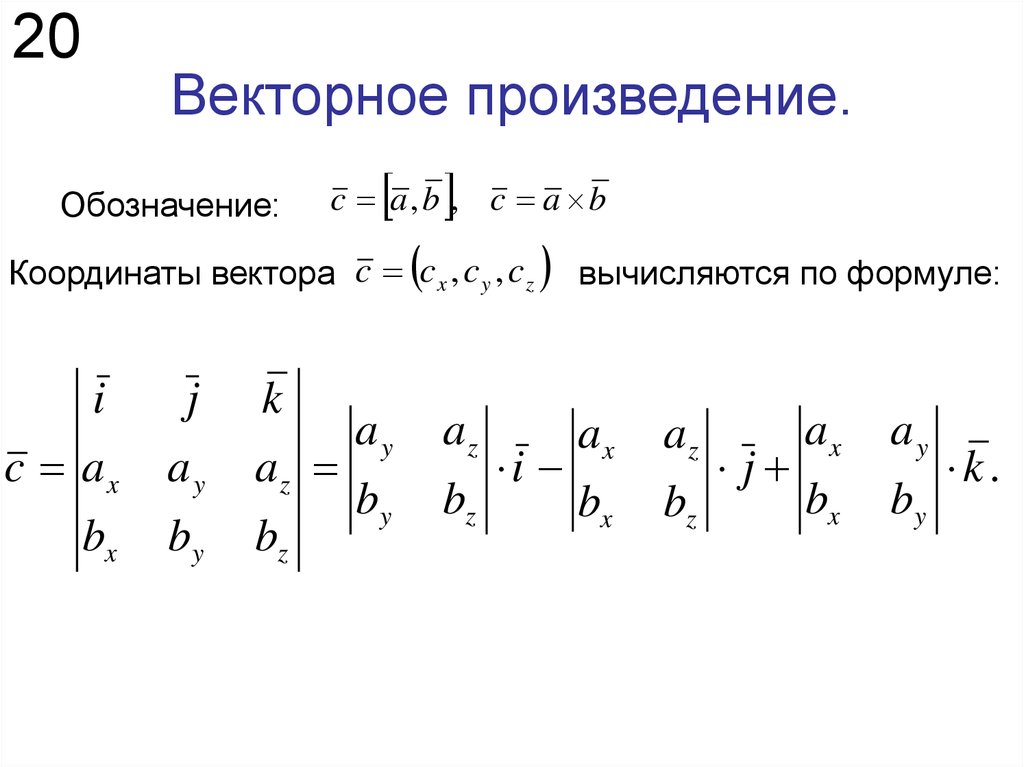 Результатом операции перекрестного произведения будет третий вектор, который перпендикулярен обоим исходным векторам и имеет величину первого вектора, умноженную на величину второго вектора, умноженную на синус угла между векторами.
Результатом операции перекрестного произведения будет третий вектор, который перпендикулярен обоим исходным векторам и имеет величину первого вектора, умноженную на величину второго вектора, умноженную на синус угла между векторами.
При нахождении векторного произведения вы можете заметить, что на самом деле их два направления, которые перпендикулярны обоим исходным векторам. Эти два направления будут прямо противоположными. Чтобы найти, какое из этих двух направлений использует векторное произведение, мы будем использовать правило правой руки .
Чтобы использовать правило правой руки, вытяните правую руку, укажите указательным пальцем в направлении первого вектора, поверните средний палец в направлении второго вектора и поднимите большой палец. Теперь ваш большой палец должен указывать в направлении вектора векторного произведения.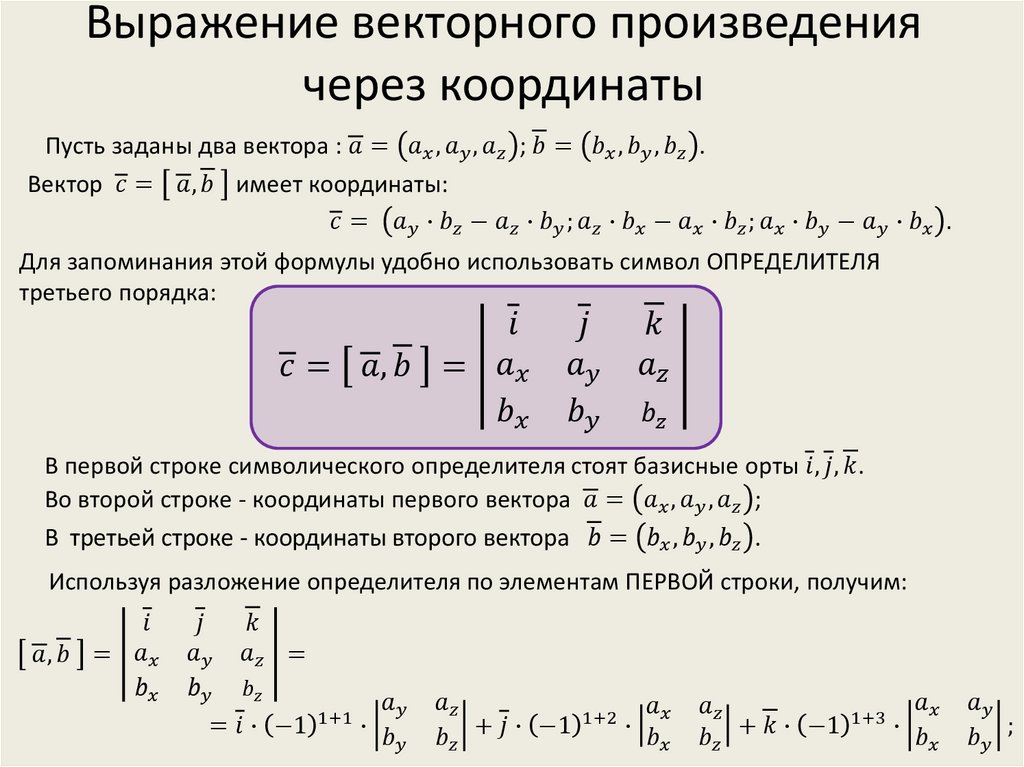
Еще одна вещь, которую вы можете заметить с помощью правила правой руки, заключается в том, что переключение порядка двух входных векторов (переключение A и B) приведет к тому, что векторное произведение будет указывать точно в противоположном направлении. Это потому, что операция перекрестного произведения равна не общительный , что означает, что порядок имеет значение. В частности, переключение порядка ввода дает вам результат, прямо противоположный исходному расчету.
Чтобы найти перекрестное произведение вручную, самый простой способ заключается в следующем.
- Запишите буквы x y z x y в ряд, как показано на рисунке ниже.
- Запишите компоненты x, y и z первого вектора под соответствующими буквами выше. Повторите это для второго вектора, записав второй вектор в строке под первым вектором.

- Нарисуйте диагонали, как показано на рисунке. Диагонали, идущие вправо при движении вниз, представляют собой положительные величины, а диагонали, идущие влево при движении вниз, представляют собой отрицательные величины.
- Используя буквы, через которые проходят диагонали в верхнем ряду, в качестве руководства для того, какой компонент результата является частью каждой величины, возьмите сумму положительных и отрицательных диагональных произведений для каждого из трех компонентов в результате. Это должно дать вам окончательную формулу, показанную на диаграмме.
В дополнение к вычислению перекрестного произведения вручную мы также можем использовать компьютерные инструменты, такие как команда «перекрест» в MATLAB, или веб-инструменты, такие как калькулятор векторных операций Wolfram, ссылка на который приведена на боковой панели этой страницы.