
НОУ ИНТУИТ | Лекция | Скалярное произведение векторов. Свойства. Векторное произведение векторов. Свойства. Смешанное произведение векторов. Свойства
< Лекция 10 || Лекция 7: 123
Аннотация: В лекции рассматриваются линейные операции над векторами, и дается практическое использование этих операций при решении различных задач
Ключевые слова: операции, вектор, длина, модуль, компланарность, коллинеарность, Произведение, базисными векторами, ПО, Главная диагональ, произведение вектора, равенство, векторное произведение, антисимметричность, координаты, разность, направляющие косинусы, аргумент, площадь
Умножение
Различают несколько видов операции умножения.
1. Умножение вектора на скалярную величину. При умножении вектора на скаляр получают новый вектор , длина (модуль) которого изменяется в раз, а направление совпадает с направлением исходного вектора , если , или противоположно исходному вектору, если . В координатной форме, если a = (ax;ay;az), то b = a= . Следовательно, операция умножения вектора на скаляр не влияет на компланарность (коллинеарность) векторов. Поэтому если несколько векторов до умножения на скаляр были компланарны (коллинеарны), то после умножения компланарность (коллинеарность) между ними сохранится.
В координатной форме, если a = (ax;ay;az), то b = a= . Следовательно, операция умножения вектора на скаляр не влияет на компланарность (коллинеарность) векторов. Поэтому если несколько векторов до умножения на скаляр были компланарны (коллинеарны), то после умножения компланарность (коллинеарность) между ними сохранится.
Заметим, что любой вектор может быть представлен как произведение единичного, коллинеарного ему вектора на модуль рассматриваемого вектора, т.е.
2. Скалярное произведение векторов.
Определение 14. Скалярным произведением двух векторов и называется число S, равное . Эта операция обозначается или
Эта операция обозначается или
В частности, скалярный квадрат вектора равен квадрату его длины, т.е.
Если один из перемножаемых векторов единичный, то:
В этом случае результат представляет собой проекцию вектора на направление единичного вектора . Следовательно, любой вектор можно представить как , где a x,ay,az — проекции вектора соответственно на оси 0х, 0у и 0z.
Если вектор представлен через проекции на базисные векторы, то говорят о разложении вектора по ортогональному базису. Из рис. 6.1 видно, что в этом случае вектор является главной диагональю прямоугольного параллелепипеда, ребра которого параллельны осям координат и равны длинам проекций вектора на эти оси. Из этого же рисунка следует, что модуль вектора численно будет равен .
Рис. 6.1.
6.1.
Из определения скалярного произведения следует, что любой вектор, независимо от типа, можно представить в виде:
где , и есть скалярное произведение вектора с ортами осей координат. Тогда из последнего равенства имеем
где , и — углы, которые составляет вектор соответственно с осями 0х, 0у и 0z.
Можно заметить, что скалярное произведение коммутативно и дистрибутивно, т.е. и . Можно убедиться самостоятельно в том, что всегда выполняется равенство
Замечание 1. Если скалярное произведение двух векторов равно нулю, то эти векторы ортогональны. Действительно, если ни один из векторов не нулевой, то, по определению скалярного произведения, последнее может быть равно нулю только тогда, когда
 intuit.ru/2010/edi»> Замечание 2. , где — единичные векторы (орты) осей координат 2При этом оси координат могут быть взаимноперпендикулярны (ортогональны), хотя это и не обязательно. Данное замечание выполняется и для произвольной системы координат (косоугольной, криволинейной).
intuit.ru/2010/edi»> Замечание 2. , где — единичные векторы (орты) осей координат 2При этом оси координат могут быть взаимноперпендикулярны (ортогональны), хотя это и не обязательно. Данное замечание выполняется и для произвольной системы координат (косоугольной, криволинейной).Замечание 3. .
Замечание 4. Скалярное произведение векторов в координатной форме
Замечание 5. Используя формулу скалярного произведения векторов и , можно найти выражение косинуса угла между этими векторами через их проекции на орты:
Если , то это значит, что угол между векторами больше 90 , т.е. тупой, а если , то угол острый.
Замечание 6. Механический смысл скалярного произведения векторов.
Дальше >>
< Лекция 10 || Лекция 7: 123
Урок 2. Координаты вектора | Уроки математики и физики для школьников и родителей
Для введения понятия координат вектора следует рассмотреть возможность разложения вектора по осям координат. Каждый вектор задаётся парой чисел – проекциями этого вектора на оси координат. При таком подходе действия над векторами можно свести к действиям с парами чисел.
Определим проекцию вектора на координатную ось. Пусть задана координатная ось Ох. Единичный отрезок ОЕ будем считать единичным вектором
то есть вектором, длина которого равна 1.
Возьмём любой вектор
и отложим его от некоторой точки А:
Спроектируем точки А и В на ось Ох. Получим точки А1, В1 и составляющую А1В1 вектора
по оси Ох.
Её длину со знаком <<плюс>> или <<минус>> и называют проекцией вектора
на ось Ох.
Проекцией ах вектора
на ось Ох называют длину его составляющей
При этом берётся знак <<плюс>>, если направление вектора
совпадает с направлением оси Ох,
и знак <<минус>>, если эти
направления противоположны.
Если
то есть А1 = В1, то ах = 0.
Прежде чем ввести понятие координат вектора, рассмотрим следующий пример.
ПРИМЕР:
Пусть на плоскости введена прямоугольная система
координат с единичными векторамикоординатных осей Ох и Оу.
Пусть – некоторый
вектор, а ах и ау – его проекции на оси
координат. Тогда вектор
по векторам
Пару чисел ах и ау называют координатами вектора
в данной системе координат.
Любой вектор является
свободным, поэтому при необходимости можно отложить его от какой-нибудь другой
точки плоскости. Для векторов можно вообще не строить оси, прямоугольную
систему координат, нужен лишь базис, в данном случае ортонормированный базис
плоскости
Для векторов можно вообще не строить оси, прямоугольную
систему координат, нужен лишь базис, в данном случае ортонормированный базис
плоскости
ПРИМЕР:
Разложить векторпо базисным векторамРЕШЕНИЕ:
Составим векторное уравнение:
которое можно записать в виде системы линейных уравненийИз первого уравнения выражаем х.
А(2; 1), В(–2; 3),
а смысл координат абсолютно разный, и надо хорошо понимать эту разницу.
Вектор
получается из коллинеарного ему единичного вектора
умножением на
При этом, если
сонаправлен с
Если же
противоположно направлен
Следовательно, имеет место равенство
Проекция точки – точка, проекция отрезка – отрезок (или точка), а проекция
вектора – число.
Обязательно нужно понимать различие между координатами точек и координатами векторов.
Координаты точек – это обычные координаты в прямоугольной системе координат. Каждая точка обладает строгим местом на плоскости, и перемещать их куда-либо нельзя.
Координаты вектора – это его разложение по базису
Координаты вектора – это коэффициенты единственно возможной линейной комбинации базисных векторов в выбранной системе координат, равной данному вектору.
Рассмотрим рисунок.
Если точка А не лежит на координатных осях, то
треугольник ОАА1 прямоугольный.
Тогда
по теореме Пифагора.
Так как А1А = ОА2,
то получим, что
Но
то есть
Формула справедлива и в тех случаях, когда точка А лежит на какой-то
оси координат.
Координаты равных векторов соответственно равны.
Векторы, имеющие соответственно равные координаты, равны.
Координаты вектора связаны с координатами точки по следующему правилу:
Чтобы найти координаты вектора, нужно от координат конца вектора отнять координаты начала вектора.
В частности, если вектор отложен от начала координат, то координаты вектора равны координатам его конца.
Проекция вектора на заданное направление.
Пусть заданы два вектора
Приведём эти векторы к одному началу О.
Угол, образованный лучами, исходящими из точки О и направленными вдоль векторов
называют углом между векторами
Обозначим это угол
через α.
Число
ab = a cos α
называется проекцией вектора
на направление вектора
Проекция вектора
получается, если из его конца опустить перпендикуляр на направление вектора
Тогда расстояние от общего начала векторов – точки О – до точки пересечения указанного перпендикуляра с прямой, на которой лежит вектор
будет равно модулю проекции вектора
на направление вектора
Угол α может принимать различные значения, поэтому в
зависимости от знака cos α проекция может принимать положительные,
отрицательные значения или нуль.
Проекция равна нулю,
если направления векторов
взаимно перпендикулярны. Проекции равных векторов равны. Проекции противоположных векторов отличаются знаком.
На координатной плоскости будем откладывать векторы от начала координат:
Каждому вектору будет отвечать полностью определенная точка А, каждой точке А плоскости – полностью определенный вектор
Точку А называть будем концом вектора
Координатами вектора называют координаты его конца,
которые обозначим
Координаты нулевого вектора
равны
Если вектор
ненулевой, то он имеет определённое направление. Направление вектора
– это не что иное, как направление, заданное
лучом ОА. Этот луч можно получить из луча Ох (положительного луча оси абсцисс) в результате
поворота Rα.
Этот луч можно получить из луча Ох (положительного луча оси абсцисс) в результате
поворота Rα.
Если ограничить угол α условием
–180⁰ < α ≤ 180⁰,
то угол α определяется вектором
однозначно. Говорят, что вектор
образует угол α с положительным направлением оси абсцисс. Ненулевой вектор полностью определяется заданием его длины
и углом α, который образует вектор с положительным направлением оси абсцисс. Вектор единичной длины называется единичным вектором. Конец единичного вектора лежит на единичном кругу. Поэтому единичный вектор, который образует угол α с осью абсцисс, записывают в виде
Его координаты равны
Возьмём единичный вектор
того же самого направления, что и вектор
Отношение
будут равными между собою при произвольном угле α.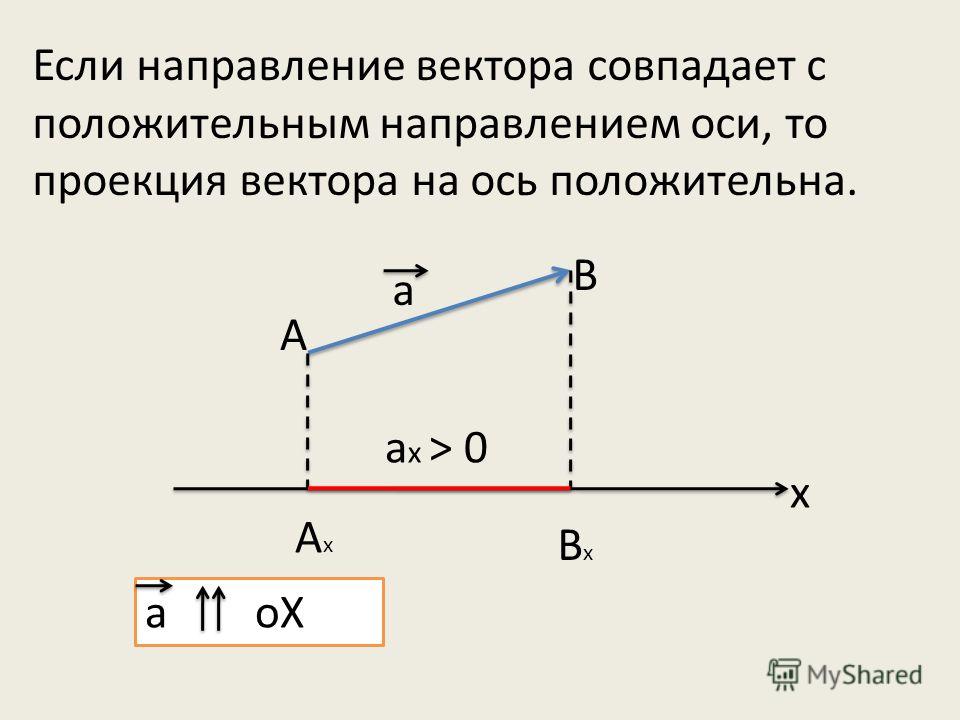 Равенство абсолютных величин этих отношений выплывает
из подобия треугольника OAN и OEM.
Равенство абсолютных величин этих отношений выплывает
из подобия треугольника OAN и OEM.
Знаки ординат
одинаковые. Но
Поэтому
откуда
Аналогично получим:
Равенство абсолютных величин этих отношений выплывает из подобия треугольников OAN и OEM.
Знаки абсцисс
одинаковые. Поэтому,
Откуда
Таким образом, вектор
который образует угол α с положительным направлением оси абсцисс, имеет координаты
Координаты вектора на плоскости.
Координаты вектора
который имеет
начало в точке А и конец в точке В, равняются разности соответствующих координат точек В и А. Если началом вектора
является точка А(хА; уА), а концом – точка В(хВ; уВ), то
Если началом вектора
является точка А(хА; уА), а концом – точка В(хВ; уВ), то
Записывают вектор
указывая его координаты так:
Например:
ПРИМЕР:
Найдите вектор
если А(4; 1), В(2;
–5).
РЕШЕНИЕ:
то есть
Длина вектора на плоскости
Если есть вектор
ПРИМЕР:
Найдите модуль вектораРЕШЕНИЕ:
ПРИМЕР:
Модуль вектора
ПРИМЕР:
Найти длину векторов, если одна клетка
имеет площадь 1 см2.
РЕШЕНИЕ:
Так как клетка имеет площадь 1 см2, то очевидно что
Длину вектора
найдём с помощью теоремы Пифагора. Получим:
ОТВЕТ:
ПРИМЕР:
Найдите модуль вектора
РЕШЕНИЕ:
ПРИМЕР:
Модуль вектора
равен 10. Найдите х.
РЕШЕНИЕ:
По условию
Равенство векторов на
плоскости.
Равные векторы имеют равные координаты. Если координаты векторов равны, то векторы равны.
Если
Если
Равные векторы имеют соответственно равные координаты. И наоборот: если у векторов соответствующие координаты равны, то векторы равны.
ПРИМЕР:
Даны точки
А(–2; 3), B(4; –1), C(x; –2), D(0; y).
Найдите х и у. Если
РЕШЕНИЕ:
то есть АВ = (6; –4).
то есть CD = (–x; y + 2). Поскольку
то –х = 6 і у + 2 = –4.
Откуда х = –6; у = –6.
Определение коллинеарности векторов с помощью координат вектора.
Если векторы коллинеарные, то их соответствующие координаты пропорциональные. И наоборот, если соответствующие координаты двух векторов пропорциональны, то эти векторы коллинеарные.
Если есть векторы
и они коллинеарные, то
Если есть векторы
– коллинеарные векторы.
Противоположные векторы имеют противоположные соответствующие координаты.
Если соответствующие координаты двух векторов противоположны, то векторы противоположны.
Если имеем
Если имеем
ПРИМЕР:
Какие из векторовколлинеарны ?
РЕШЕНИЕ:
Так как вектора не содержат компоненты равные нулю, то воспользуемся условием коллинеарности следующего вида:
Вектораколлинеарны, так какВекторане коллинеарны, так какВекторане коллинеарны, так как
Математика и наука были изобретены людьми для описания и
понимать окружающий мир. На этом слайде мы показываем три примера, в которых два вектора
в сравнении.
Векторы обычно обозначаются на рисунках стрелкой.
Длина стрелки указывает величину и
кончик стрелки указывает направление. Вектор
помечены буквой в алфавитном порядке
буква с линией сверху, чтобы отличить ее от скаляра.
Наши шрифты для веб-печати не поддерживают эту запись, поэтому мы будем использовать
жирная буква для вектора. Пример №1: у нас есть два вектора с одинаковым направлением, но величины (или длины векторов) различны. Вектор и не равен вектору b в этом примере. Этот пример кажется довольно просто, потому что то же правило применимо и к скалярам; если величина разная, количества не равны. Объект весом 50 фунтов не равен объекту весом 25 фунтов. Пример №2: Этот пример немного сложнее.
В этом случае у нас есть два вектора с
одинаковые по величине, но направления разные. Вектор и не равен вектору b в этом примере. Если бы вектор был
скорости, это говорит нам о том, что автомобиль, движущийся со скоростью 45 миль в час на северо-восток
окажется в другом месте, чем другая машина, также движущаяся со скоростью 45 миль в час
строго на восток. За один час они оба пройдут 45 миль, но места
будет другим. Пример №3: В этом примере у нас есть два вектора одинаковой длины. и одинаковое направление. Вектор равен вектору b . Чтобы два вектора были равны, они должны иметь как модуль, так и направления равны. Экскурсии с гидом
Деятельность: Похожие сайты: |
от горизонтальных/вертикальных составляющих до направления/величины
Пусть $\,\vec v\,$ — вектор с известным аналитическая форма $\,\langle a\,\,b\rangle\,$:
Как можно использовать эту информацию для определения направления и величины вектора $\,\vec v\,$? 92} = 0\,$.
только способ, которым это может произойти, для и $\,a\,$ и $\,b\,$ равны нулю.
Таким образом, $\,\vec v = \langle 0\,\,0\rangle\,$.
Если вектор имеет нулевую величину, то он должен быть нулевым вектором.
Получение (стандарт) направления от горизонтальных и вертикальных компонентов
| направление вектора можно описать по-разному. Например, пеленги часто используются в навигации. Условные обозначения углов, используемые для определения тригонометрических функций Условные обозначения углов «стандартного направления»
| положительный угол $\,\theta$ стандартное направление: |
Стандартное направление для векторов, указывающих вверх/вниз/влево/вправо
Когда хотя бы одна компонента (горизонтальная или вертикальная) вектора равна нулю,
тогда не требуется никакой формулы, чтобы найти стандартное направление.
Вот таблица, в которой суммированы результаты для $\,\vec v = \langle a\,\, b\rangle\,$:
| горизонтальные/вертикальные компоненты | представление стрелки | стандартное направление, $\,\theta$ | |
| нулевой вектор: $\,a = 0\,$ и $\,b = 0\,$ | (без стрелки) | нулевой вектор не имеет направления; направление $\,\langle 0,0\rangle\,$ не определено | |
| $\,\vec v = \langle a\,\,0\rangle\,$ с $\,a > 0\,$ 9\циркуляр\,$ | |||
| $\,\vec v = \langle 0\,\,b\rangle\,$ с $\,b > 0\,$ |
| 9\циркуляр\,$||
| $\,\vec v = \langle 0\,\,b\rangle\,$ с $\,b |
| 9\циркуляр\,$
Формула стандартного направления векторов в квадрантах I и IV
Для произвольного вектора функция арктангенса дает удобные формулы для стандартное направление . Однако в разных квадрантах нужны разные формулы. 9\circ)\,$, тангенс которого равен $\,x\,$ Это «степенная версия» определения.
Воспоминание:
Для формул в этом разделе предполагается, что $\,\arctan x\,$ выражается в градусах. В квадранте I, где $\,a > 0\,$ и $\,b > 0\,$, все просто: $$ \начать{собирать} \cssId{s83}{\tan\theta = \frac ba}\cr \cssId{s84}{\theta = \arctan\bigl(\frac ba\bigr)} \конец{собрать} $$ Когда $\,\frac ba\,$ положительно, $\,\arctan(\frac ba)\,$ возвращает угол между $\,0^\circ\,$ и $\,9\circ + \arctan(\frac ba) \,$. | зависит от знаков $\,a\,$ и $\,b\,$, как указано ниже:
|
В итоге:
В квадранте I:
$\,\theta = \arctan(\frac ba)\,$
(Эта формула всегда дает угол между $\,0^\circ\,$ и $\,9\цирк\,$.
Обратите внимание, что оба этих углов имеют значение тангенса, равное $\,\frac ba\,$.
9\цирк\,$.
Обратите внимание, что оба этих углов имеют значение тангенса, равное $\,\frac ba\,$.