Mathway | Популярные задачи
Популярные задачи
Элемент. математикаОсновы алгебрыАлгебраТригонометрияОсновы мат. анализаМатематический анализКонечная математикаЛинейная алгебраХимияPhysics
| Рейтинг | Тема | Задача | Форматированная задача |
|---|---|---|---|
| 1 | Решить, используя обратную матрицу | x+2y=1 , 4x+5y=13 | , |
| 2 | Перемножить матрицы | [[1/( квадратный корень из 17),-4/( квадратный корень из 17)]][[1/( квадратный корень из 17)],[-4/( квадратный корень из 17)]] | |
| 3 | Найти область определения | x+y=3 | |
| 4 | Найти область определения | x-y=3 | |
| 5 | Найти область определения | y=-2x+3 | |
| 6 | Найти область определения | y=2x+1 | |
| 7 | Записать в виде векторного равенства | x=x^2+9x+3 , x=x+2 | , |
| 8 | Найти область определения | y=2x | |
| 9 | Найти область определения | y=-3x | |
| 10 | Найти область определения | y=3x-2 | |
| 11 | Найти область определения | y=4x | |
| 12 | Найти область определения | 3x+2y=6 | |
| 13 | Trovare la 5×5 Matrice Identità | 5 | |
| 14 | Trovare la 6×6 Matrice Identità | 6 | |
| 15 | Trovare la 4×4 Matrice Identità | 4 | |
| 16 | Решить, используя обратную матрицу | 2x+y=-2 , x+2y=2 | , |
| 17 | Решить, используя обратную матрицу | 4x+4=y , y=6x | , |
| 18 | Решить, используя обратную матрицу | 4x+2=5y-3 , y=3x-1 | , |
| 19 | Найти степенное множество | (3,4) | |
| 20 | Вычислить | кубический корень из 216 | |
| 21 | Найти степенное множество | (1,3) | |
| 22 | Найти область определения | 3x-2y=12 | |
| 23 | Найти область определения | y=5x+2 | |
| 24 | Найти область определения | y=2x-3 | |
| 25 | Найти область определения | y=2x-4 | |
| 26 | Найти область определения | y=2x+5 | |
| 27 | Найти область определения | y=1/2x | |
| 28 | Найти область определения | y=1/2x-3 | |
| 29 | Найти область определения | y=2/3x-2 | |
| 30 | Найти область определения | x=2y | |
| 31 | Найти область определения | x-2y=2 | |
| 32 | Найти область определения | x-2y=6 | |
| 33 | Найти область определения | 2y+x | |
| 34 | Найти область определения | 2x+y=0 | |
| 35 | Найти область определения | y=5x+6 | |
| 36 | Найти область определения | y=x+3 | |
| 37 | Solve Using a Matrix by Elimination | y=4x+3x-2 , y=6 | , |
| 38 | Проверить линейную зависимость | B={[[-10,2],[5,-2. 5]]} 5]]} | |
| 39 | Сложение | [[2,4],[6,-4]]+[[-3,-7],[20,10]] | |
| 40 | Проверить линейную зависимость | B={[[-1,2],[0,-2.5]]} | |
| 41 | Перемножить матрицы | [[0,0,1,1],[1,0,1,0],[0,0,0,1],[0,1,0,0]][[0,0,1,1],[1,0,1,0],[0,0,0,1],[0,1,0,0]] | |
| 42 | Найти область определения | y=5x | |
| 43 | Найти область определения | y=7x | |
| 44 | Найти область определения | y=-x-2 | |
| 45 | Найти область определения | y=x-2 | |
| 46 | Найти область определения | y=x-3 | |
| 47 | Привести матрицу к ступенчатому виду по строкам | [[4,-3,1,0],[1,0,-2,0],[-2,1,1,0]] | |
| 48 | Записать в виде векторного равенства | x+y+z=2 , 4x+5y+z=12 , 2x=-4 | , , |
| 49 | Найти определитель | [[0,-1,a],[3,-a,1],[1,-2,3]] | |
| 50 | Найти область определения | y=-x+2 | |
| 51 | Найти определитель | [[2,5,0],[1,0,-3],[2,-1,2]] | |
| 52 | Найти определитель | [[7,5,0],[4,5,8],[0,-1,5]] | |
| 53 | Найти обратный элемент | [[1,-3,0,-2],[3,-12,-2,-6],[-2,10,2,5],[-1,6,1,3]] | |
| 54 | Найти обратный элемент | [[1,2,3],[2,5,7],[3,7,9]] | |
| 55 | Привести матрицу к ступенчатому виду по строкам | [[0,1,5,-4],[1,4,3,-2],[2,7,1,-2]] | |
| 56 | Привести матрицу к ступенчатому виду по строкам | [[1,1,0],[1,0,1],[1,0,1],[2,1,0],[2,1,0]] | |
| 57 | Привести матрицу к ступенчатому виду по строкам | [[1,2,3],[4,5,6],[7,8,9]] | |
| 58 | Привести матрицу к ступенчатому виду по строкам | [[7,8]] | |
| 59 | Найти область определения | 2x+y=1 | |
| 60 | Записать в виде векторного равенства | 2x+y=-2 , x+2y=2 | , |
| 61 | Найти область определения | x-2y=4 | |
| 62 | Найти область определения | x-y=-1 | |
| 63 | Найти область определения | x+y=5 | |
| 64 | Найти область определения | x=-3y-8 | |
| 65 | Найти область определения | x=-2y-8 | |
| 66 | Найти область определения | x+y=6 | |
| 67 | Найти область определения | x+y=4 | |
| 68 | x+2y=4 | ||
| 69 | Найти область определения | x+y | |
| 70 | Найти область определения | y=7x+9 | |
| 71 | Найти область определения | y=1/2x-5 | |
| 72 | Найти область определения | y=1/2x+2 | |
| 73 | Найти область определения | y=1/2x+3 | |
| 74 | Найти область определения | x-y=-3 | |
| 75 | Найти область определения | x-y=4 | |
| 76 | Найти область определения | y=-2x | |
| 77 | Найти область определения | y=-2x+1 | |
| 78 | Найти область определения | y=2^(x+9) | |
| 79 | Найти область определения | y=10-x^2 | |
| 80 | Найти область определения | y=2x-6 | |
| 81 | Найти область определения | y=-2x-3 | |
| 82 | Найти область определения | y=3x-8 | |
| 83 | Найти область определения | y=3x | |
| 84 | Найти область определения | y=-3x+1 | |
| 85 | Найти область определения | y=4x+3 | |
| 86 | Найти область определения | y=3x-4 | |
| 87 | Найти область определения | y=4x-2 | |
| 88 | Найти область определения | y=-6x | |
| 89 | Найти область определения | y=x-4 | |
| 90 | Найти область определения | 7 корень четвертой степени из 567y^4 | |
| 91 | Найти область определения | c=5/9*(f-32) | |
| 92 | Найти область определения | f=9/5c+32 | |
| 93 | Вычислить | квадратный корень из 4 | |
| 94 | Привести матрицу к ступенчатому виду по строкам | [[-6,7],[2,6],[-4,1]] | |
| 95 | Найти собственные значения | [[2,1],[3,2]] | |
| 96 | Найти собственные значения | [[4,0,1],[2,3,2],[49,0,4]] | |
| 97 | Найти степенное множество | A=(2,3,4,5) | |
| 98 | Найти мощность | (2,1) | |
| 99 | Решить, используя обратную матрицу | -3x-4y=2 , 8y=-6x-4 | , |
| 100 | Решить, используя обратную матрицу | 2x-5y=4 , 3x-2y=-5 | , |
Линейная алгебра
Линейная алгебра
ОглавлениеПРЕДИСЛОВИЕ К ЧЕТВЕРТОМУ ИЗДАНИЮВВЕДЕНИЕ ГЛАВА 1. МАТРИЦЫ И ОПРЕДЕЛИТЕЛИ 1. Понятие матрицы. 2. Основные операции над матрицами и их свойства.  3. Блочные матрицы. § 2. Определители 2. Выражение определителя непосредственно через его элементы. 3. Теорема Лапласа. 4. Свойства определителей. 5. Примеры вычисления определителей. 6. Определитель суммы и произведения матриц. 7. Понятие обратной матрицы. § 3. Теорема о базисном миноре матрицы 1. Понятие линейной зависимости строк. 2. Теорема о базисном мнноре. 3. Необходимое и достаточное условие равенства нулю определителя. ГЛАВА 2. ЛИНЕЙНЫЕ ПРОСТРАНСТВА § 1. Понятие линейного пространства 2. Некоторые свойства произвольных линейных пространств. § 2. Базис и размерность линейного пространства 1. Понятие линейной зависимости элементов линейного пространства. 2. Базис и координаты. 3. Размерность линейного пространства. 4. Понятие изоморфизма линейных пространств. § 3. Подпространства линейных пространств 1. Понятие подпространства и линейной оболочки. 2. Новое определение ранга матрицы. 3. 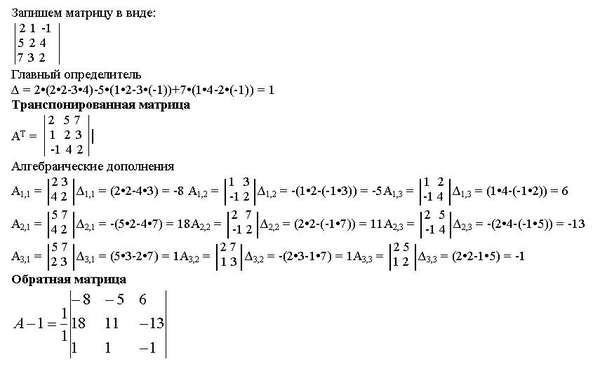 Сумма и пересечение подпространств. Сумма и пересечение подпространств.4. Разложение линейного пространства в прямую сумму подпространств. § 4. Преобразование координат при преобразовании базиса n-мерного линейного пространства 2. Связь между преобразованием базисов и преобразованием соответствующих координат. ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ § 1. Условие совместности линейной системы 2. Нетривиальная совместность однородной системы. 3. Условие совместности общей линейной системы. § 2. Отыскание решений линейной системы 2. Отыскание всех решений общей линейной системы. 3. Свойства совокупности решений однородной системы. 4. Заключительные замечания о решении линейных систем. ГЛАВА 4. ЕВКЛИДОВЫ ПРОСТРАНСТВА § 1. Вещественное евклидово пространство и его простейшие свойства 2. Простейшие свойства произвольного евклидова пространства. § 2. Ортонормированный базис конечномерного евклидова пространства 2. Свойства ортонормированного базиса. 3. Разложение n-мерного евклидова пространства на прямую сумму подпространства и его ортогонального дополнения. 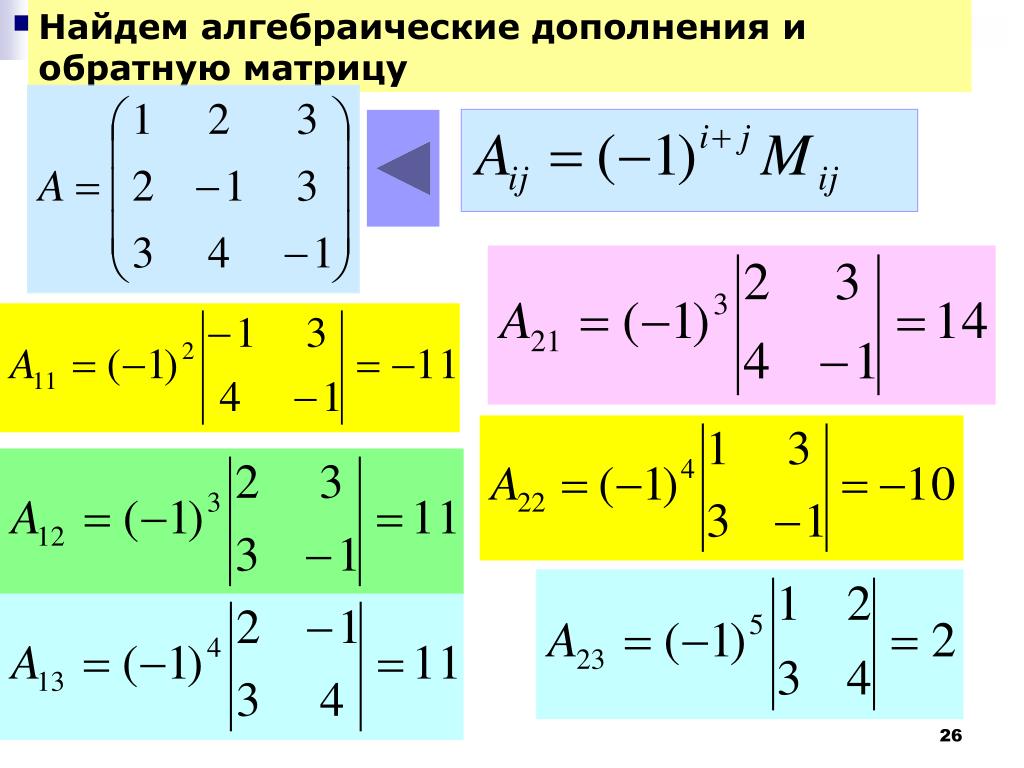 4. Изоморфизм n-мерных евклидовых пространств. § 3. Комплексное евклидово пространство 2. Неравенство Коши — Буняковского. Понятие нормы. 3. Ортонормированный базис и его свойства. § 4. Метод регуляризации для отыскания нормального решения линейной системы ГЛАВА 5. ЛИНЕЙНЫЕ ОПЕРАТОРЫ § 1. Понятие линейного оператора. Основные свойства 2. Действия над линейными операторами. Пространство линейных операторов. 3. Свойства множества L(V, V) линейных операторов. § 2. Матричная запись линейных операторов 2. Преобразование матрицы линейного оператора при переходе к новому базису. 3. Характеристический многочлен линейного оператора. § 3. Собственные значения и собственные векторы линейных операторов § 4. Линейные и полуторалинейные формы в евклидовом пространстве 2. Полуторалинейные формы в евклидовом пространстве. Специальное представление таких форм. § 5. Линейные самосопряженные операторы в евклидовом пространстве 2. Самосопряженные операторы. 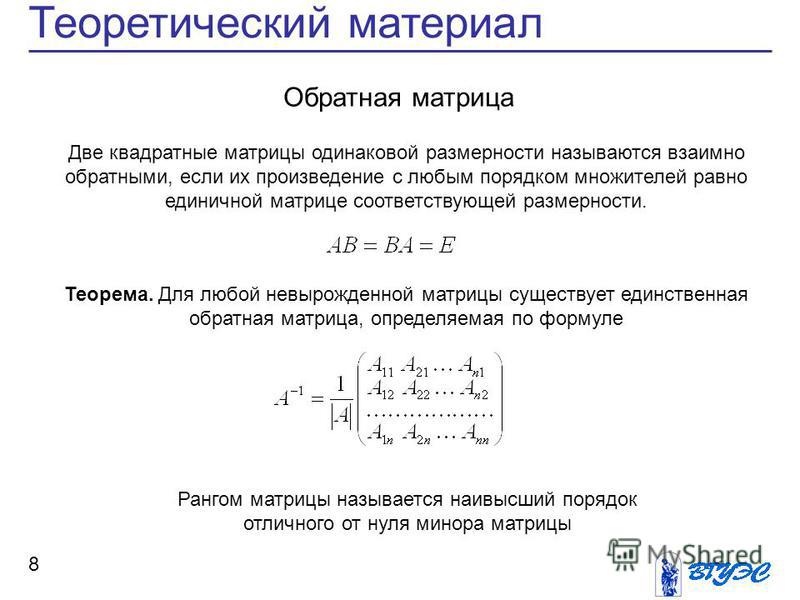 Основные свойства. Основные свойства.3. Норма линейного оператора. 4. Дальнейшие свойства самосопряженных операторов. 5. Спектральное разложение самосопряженных операторов. Теорема Гамильтона—Кэли. 6. Положительные операторы. Корни m-й степени из оператора. § 6. Приведение квадратичной формы к сумме квадратов § 7. Унитарные и нормальные операторы § 8. Канонический вид линейных операторов § 9. Линейные операторы в вещественном евклидовом пространстве 2. Ортогональные операторы. ГЛАВА 6. ИТЕРАЦИОННЫЕ МЕТОДЫ РЕШЕНИЯ ЛИНЕЙНЫХ СИСТЕМ И ЗАДАЧ НА СОБСТВЕННЫЕ ЗНАЧЕНИЯ § 1. Итерационные методы решения линейных систем 2. Общий неявный метод простой итерации. 3. Модифицированный метод простой итерации. 4. Метод Зейделя. 5. Метод верхней релаксации. 6. Случай несимметричной матрицы А. 7. Итерационный метод П. Л. Чебышева. § 2. Решение полной проблемы собственных значений методом вращений ГЛАВА 7. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ § 1. Билинейные формы 2.  Представление билинейной формы в конечномерном линейном пространстве. Представление билинейной формы в конечномерном линейном пространстве.3. Преобразование матрицы билинейной формы при переходе к новому базису. Ранг билинейной формы. § 2. Квадратичные формы § 3. Приведение квадратичной формы к сумме квадратов 2. Метод Якоби. § 4. Закон инерции квадратичных форм. Классификация квадратичных форм 2. Классификация квадратичных форм. 3. Критерий Сильвестра знакоопределенности квадратичной формы. § 5. Полилинейные формы § 6. Билинейные и квадратичные формы в евклидовом пространстве 2. Приведение квадратичной формы к сумме квадратов в ортогональном базисе. 3. Одновременное приведение двух квадратичных форм к сумме квадратов в линейном пространстве. 4. Экстремальные свойства квадратичной формы. § 7. Гиперповерхности второго порядка 2. Параллельные переносы в евклидовом пространстве. Преобразования ортонормированных базисов в ортонормированные. 3. Преобразование общего уравнения гиперповерхности второго порядка при параллельном переносе. 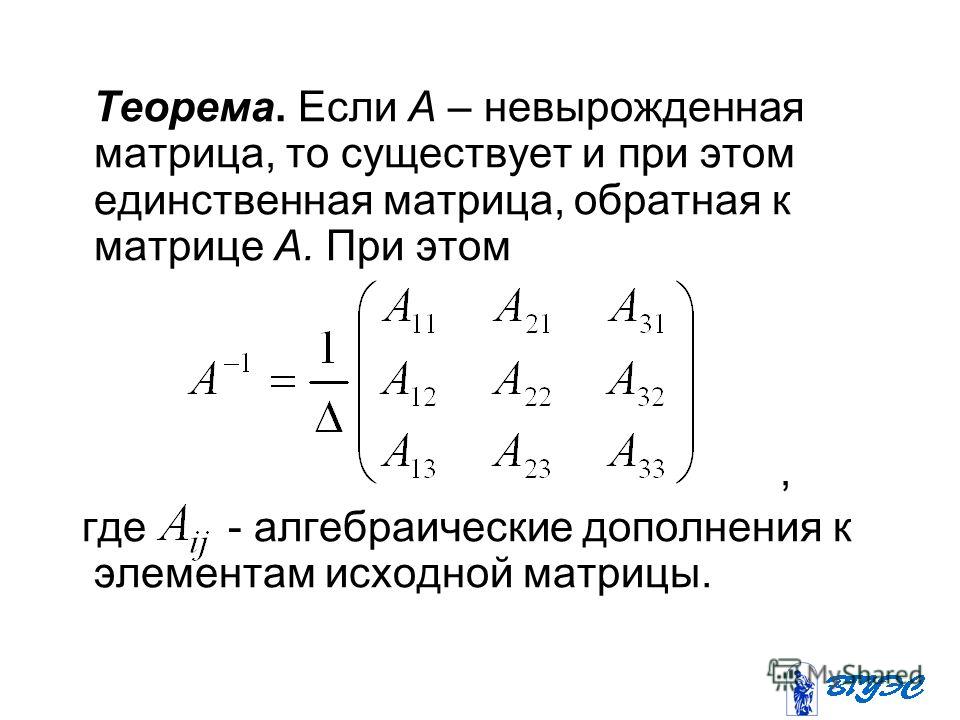 4. Преобразование общего уравнения гиперповерхности второго порядка при переходе от ортонормированного базиса к ортонормированиому. 5. Инварианты общего уравнения гиперповерхности второго порядка. 6. Центр гиперповерхности второго порядка. 7. Стандартное упрощение любого уравнения гиперповерхности второго порядка путем преобразования ортонормированного базиса. 8. Упрощение уравнения центральной гиперповерхности второго порядка. Классификация центральных гиперповерхностей. 9. Упрощение уравнения нецентральной гиперповерхности второго порядка. Классификация нецентральных гиперповерхностей. ГЛАВА 8. ТЕНЗОРЫ § 1. Преобразование базисов и координат 2. Взаимные базисы. Ковариантные и контравариантные координаты векторов. 3. Преобразования базиса и координат. § 2. Понятие тензора. Основные операции над тензорами 2. Примеры тензоров. 3. Основные операции над тензорами. § 3. Метрический тензор. Основные операции векторной алгебры в тензорных обозначениях 2.  n. n.4. Дискриминантный тензор. 5. Ориентированный объем. 6. Векторное произведение. 7. Двойное векторное произведение. § 4. Метрический тензор псевдоевклидова пространства 2. Галилеевы координаты. Преобразования Лоренца. 3. Преобразования Лоренца пространства § 5. Тензор момента инерции ГЛАВА 9. ЭЛЕМЕНТЫ ТЕОРИИ ГРУПП § 1. Понятие группы. Основные свойства групп 2. Понятие группы. Некоторые свойства групп. 3. Изоморфизм групп. Подгруппы. 4. Смежные классы. Нормальные делители. 5. Гомоморфизмы. Фактор-группы. § 2. Группы преобразований 2. Группа линейных преобразований. 3. Сходимость элементов в группе GL(n). Подгруппы группы GL(n). 4. Группа ортогональных преобразований. 5. Некоторые дискретные и конечные подгруппы ортогональной группы. 6. Группа Лоренца. 7. Унитарные группы. § 3. Представления групп 2. Матрицы линейных представлений. Эквивалентные представления. 3. Приводимые и неприводимые представления. 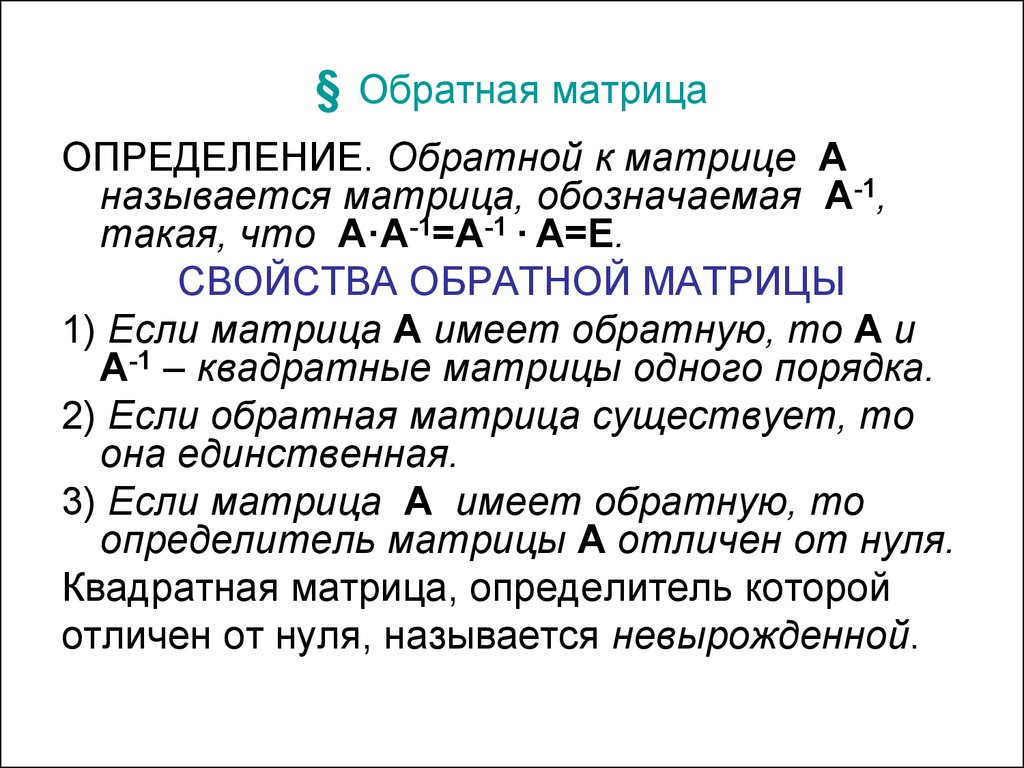 4. Характеры. |
 А., Позняк Э.Г. Линейная алгебра: Учеб. Для вузов — 4-е изд. — М. Наука. Физматлит, 1999 — 296 с.
А., Позняк Э.Г. Линейная алгебра: Учеб. Для вузов — 4-е изд. — М. Наука. Физматлит, 1999 — 296 с.
Что такое обратная матрица? – Ник Хайэм
Обратной матрицей является матрица такая, что , где — единичная матрица (которая имеет единицы на диагонали и нули везде). Обратное записывается как . Если обратное существует, то говорят, что оно несингулярное или обратимое , а в противном случае оно сингулярное .
Обратное также удовлетворяет , как мы сейчас покажем. Уравнение говорит, что для , где — й столбец и — й единичный вектор. Следовательно, столбцы span , что означает, что столбцы линейно независимы. Итак, каждый столбец находится в нулевом пространстве . Но это противоречит линейной независимости столбцов , если , т. е. .
Обратная невырожденная матрица уникальна. Если то предварительное умножение на дает , или, так как , .
Обратным к обратному является обратное: , что является просто другим способом интерпретации уравнений .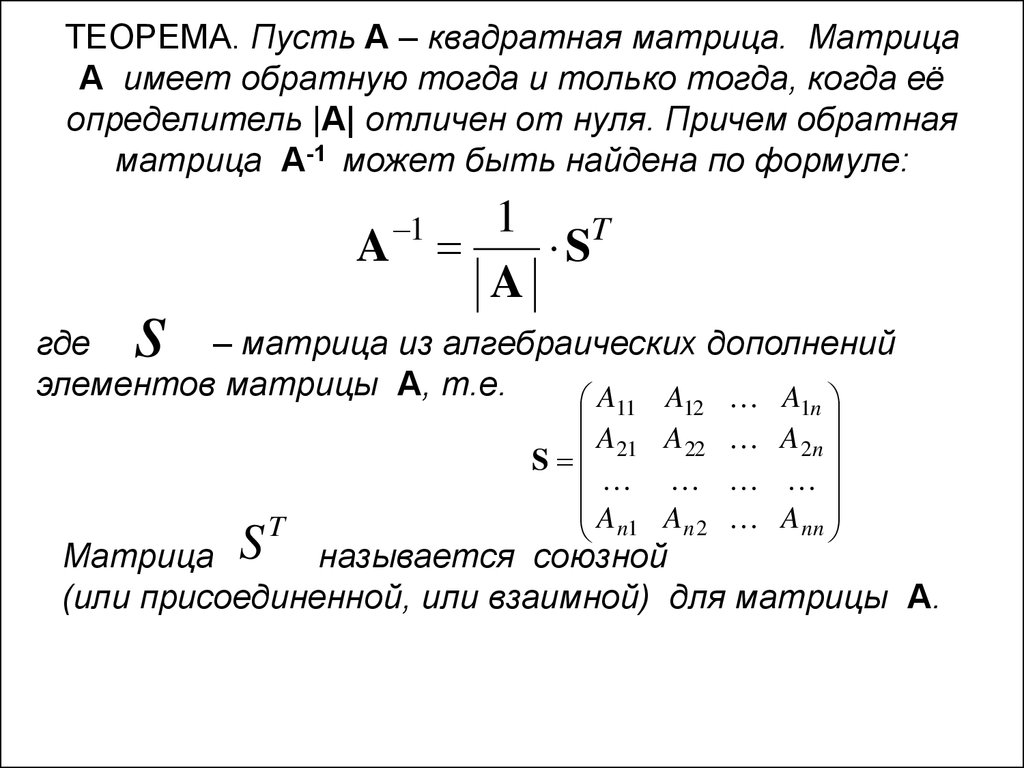
Связи с определителем
Поскольку определитель произведения матриц является произведением определителей, уравнение подразумевает , поэтому обратное может существовать только при . На самом деле всегда существует обратное, когда .
Явная формула для обратного
, где адъюгат определяется как
и где обозначает подматрицу, полученную удалением строки и столбца. Частным случаем является формула
Из уравнения следует .
Условия невырожденности
В следующем результате собраны некоторые эквивалентные условия невырожденности матрицы. Обозначим через нулевое пространство (также называемое ядром).
Теорема 1. Для следующих условий эквивалентны невырожденности:
- ,
- ,
- имеет уникальное решение для любого
- ни одно из собственных значений не равно нулю,
- .
Полезная формула:
Вот некоторые факты об обратных матрицах специальных типов.
Обратный как матричный полином
Теорема Кэли-–Гамильтона утверждает, что матрица удовлетворяет своему собственному характеристическому уравнению, то есть если , то . Другими словами, , и если неособо, то умножение на дает (поскольку
Это означает, что выражается в виде полинома степени не выше (с коэффициентами, зависящими от ).
Вычислять или не вычислять обратное значение
Обратное значение является важным теоретическим инструментом, но его вычисление в явном виде требуется редко. Если мы хотим решить линейную систему уравнений, то вычисление, а затем формирование в арифметике с плавающей запятой будет медленнее и менее точным, чем использование LU-факторизации (исключение Гаусса) для непосредственного решения системы. Действительно, для одного не решить вычислением .
Для разреженных матриц вычисление обратной матрицы может быть даже нецелесообразным, поскольку обратная сторона обычно плотная.
Если нужно вычислить обратное, как это сделать? Мы рассмотрим стоимость различных методов, измеряемую количеством необходимых элементарных арифметических операций (сложение, вычитание, деление, умножение). Используя (1), затраты равны вычислению одного определителя порядка и определителей порядка . Поскольку вычисление определителя требует как минимум операций стандартными методами, этот подход стоит как минимум операций, что является непомерно дорогим, если только оно не очень мало. Вместо этого можно вычислить факторизацию LU с поворотом, а затем решить системы для столбцов с общей стоимостью операций.
Используя (1), затраты равны вычислению одного определителя порядка и определителей порядка . Поскольку вычисление определителя требует как минимум операций стандартными методами, этот подход стоит как минимум операций, что является непомерно дорогим, если только оно не очень мало. Вместо этого можно вычислить факторизацию LU с поворотом, а затем решить системы для столбцов с общей стоимостью операций.
Уравнение (2) не дает хорошего метода для вычисления , поскольку вычисление коэффициентов и вычисление матричного полинома являются дорогостоящими.
Можно использовать быстрые методы умножения матриц, которые вычисляют произведение двух матриц в операциях для некоторого . Рекурсивно используя блочную факторизацию LU, можно свести инверсию матриц к умножению матриц. Если мы воспользуемся методом быстрого матричного умножения Штрассена, который имеет , то мы сможем выполнять вычисления в операциях.
Обозначение косой черты
MATLAB использует обратную косую черту и прямую косую черту для «разделения матрицы» со значениями и . Обратите внимание, что, поскольку умножение матриц не является коммутативным, в общем случае. У нас есть и . В MATLAB обратное можно вычислить с помощью
Обратите внимание, что, поскольку умножение матриц не является коммутативным, в общем случае. У нас есть и . В MATLAB обратное можно вычислить с помощью inv(A) , в котором используется факторизация LU с поворотом.
Прямоугольные матрицы
Если есть, то уравнение должно быть , как и . Ранговые соображения показывают, что не более одного из этих уравнений может выполняться, если . Например, если ненулевой вектор-строку, то для , но . Это пример обобщенной инверсии.
Интересная обратная
Вот треугольная матрица с интересной обратной. Этот пример адаптирован из Руководства пользователя LINPACK, в котором есть матрица, где «LINPACK» заменяет «INVERSE» на передней обложке, а инверсия — на задней обложке.
Связанные записи в блоге
Опубликовано Ником ХайэмомОпубликовано в рубрике что естьВведение в обратную матрицу
Обратная матрица \(A\) обозначается \(A^{-1}\). В этом пошаговом руководстве вы узнаете больше о формуле, методах и терминах, связанных с обратной матрицей.
В этом пошаговом руководстве вы узнаете больше о формуле, методах и терминах, связанных с обратной матрицей.
Матрица — это определенный набор объектов, расположенных в строках и столбцах. Эти объекты называются элементами матрицы. Обратная матрица может быть найдена только для квадратных матриц, число строк и столбцов которых равно, например \(2 × 2\), \(3 × 3\).
См. также
- Сложение и вычитание матриц
- Как умножить матрицу
- Как умножить матрицу на скаляр
- Как найти определители матрицы
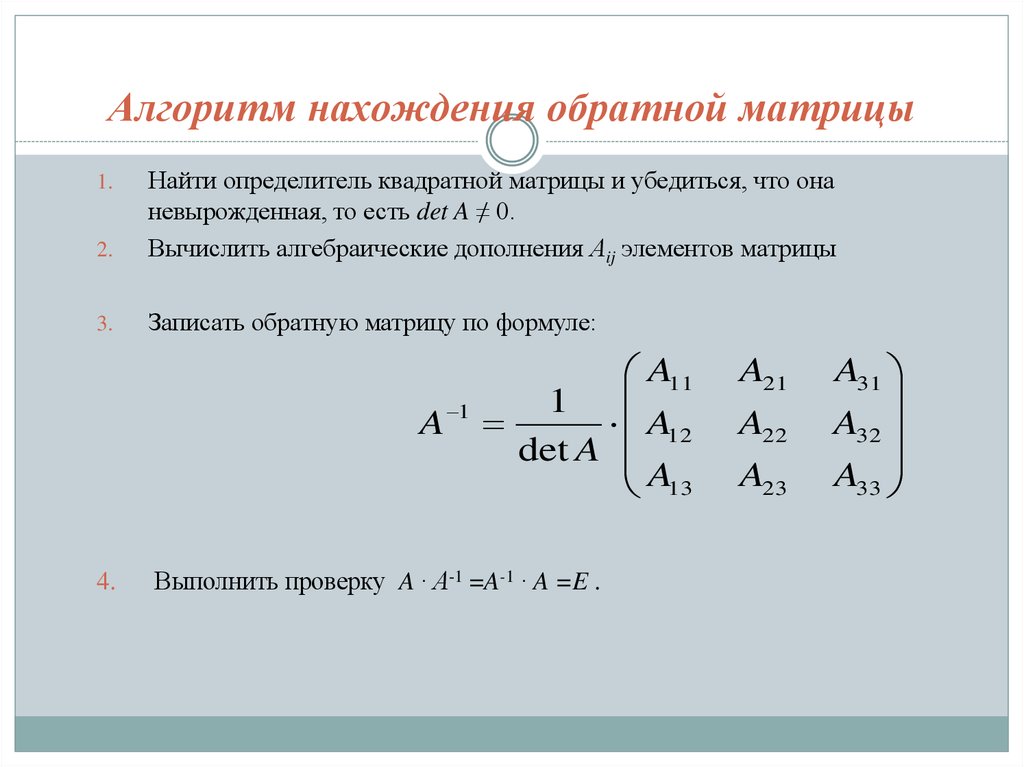
Пошаговое руководство по матрице и введение в нее обратный 9{-1}=\frac{1}{|A|}. Adj A}\)
, где \(A\) — квадратная матрица.
Примечание: Для существования обратной матрицы:
- Данная матрица должна быть квадратной.
- Определитель матрицы не должен быть равен нулю (\(|A| ≠ 0)\).
- Минор:
Минор определен для каждого элемента матрицы. Минором конкретного элемента называется определитель, полученный после удаления строки и столбца, содержащих этот элемент. 9{i+j} \times minor \:of\: a_{ij}\)
Минором конкретного элемента называется определитель, полученный после удаления строки и столбца, содержащих этот элемент. 9{i+j} \times minor \:of\: a_{ij}\)
- Определитель:
Определитель матрицы равен сумме произведения элементов и их кофакторов, конкретная строка или столбец матрицы.
- Сингулярная матрица:
Матрица с нулевым детерминантом называется сингулярной матрицей. Для одной матрицы \(A\), \(|A| = 0\). Обратная сингулярная матрица не существует.
- Несингулярная матрица:
Матрица, значение определителя которой не равно нулю, называется невырожденной матрицей. Для невырожденной матрицы \(|A| ≠ 0\). Несингулярная матрица называется обратимой матрицей, потому что ее обратная матрица вычислима.
- Сопряженная матрица :
Сопряженная матрица представляет собой транспонирование матрицы элементов кофактора данной матрицы.