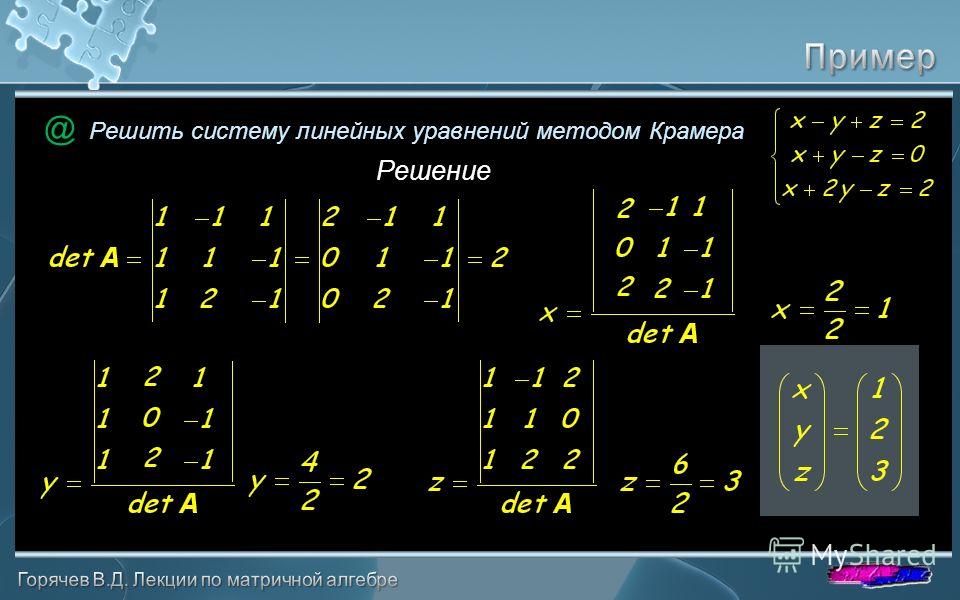
5. Даны вектор [латекс]\vec{u} = \begin{bmatrix}u_{1}\\u_{2}\end{bmatrix}[/latex] и вещественное число [latex]c [/latex], скаляр, кратный [latex]\vec{u} = \begin{bmatrix}u_{1}\\u_{2}\end{bmatrix}[/latex] на [latex]c[/latex ] — это вектор [latex]c\vec{u} = \begin{bmatrix}cu_{1}\\cu_{2}\end{bmatrix}[/latex], полученный путем умножения каждой записи в [latex]\vec{ u}[/latex] от [latex]c[/latex]. 9n[/latex], и если [latex]a_{1}, \cdots, a_{p}[/latex] являются константами, то [latex]a_{1}\vec{v}_{1}+\cdots+ a_{p}\vec{v}_{p}[/latex] представляет собой линейную комбинацию векторов [latex]\vec{v}_{1}, \cdots, \vec{v}_{p}[/ латекс]
Факты/Свойства:
- [латекс]\vec{u}+\vec{v}=\vec{v}+\vec{u}[/latex]
- [латекс](\vec{u}+\vec{v})+\vec{w}=\vec{u}+(\vec{v}+\vec{w})[/latex]
- [латекс]\vec{u}+\vec{0}=\vec{0}+\vec{u} =\vec{u}[/latex]
- [латекс]\vec{u}+(-\vec{u})=-\vec{u}+\vec{u}=\vec{0}[/latex]
- [латекс]c(\vec{u}+\vec{v})=c\vec{u}+c\vec{v}[/латекс]
- [латекс](c+d)\vec{u}=c\vec{u}+d\vec{u}[/латекс]
- [латекс](с(d\vec{u})) = (cd)(\vec{u})[/латекс]
- [латекс]1\cdot \vec{u} = \vec{u}[/латекс]
1. 3 Видео 2
3 Видео 2
Пример 1 : Определите, может ли [латекс]\vec{y} = \begin{bmatrix}2\\-2\\4\end{bmatrix}[/latex] быть записана как линейная комбинация [латекс]\vec{v_{1}} = \begin{bmatrix}-1\\3\\0\end{bmatrix}[/latex] и [латекс]\vec{v_{ 2}} = \begin{bmatrix}2\\-5\\1\end{bmatrix}[/latex].
1.3 Видео 3
Упражнение 1 : Определите, может ли [латекс]\vec{y} = \begin{bmatrix}1\\3\\-4\end{bmatrix}[/latex] быть записана как линейная комбинация [латекс]\vec{v_{1}} = \begin{bmatrix}1\\2\\-1\end{bmatrix}[/latex] и [латекс]\vec{v_{ 2}} = \begin{bmatrix}3\\-1\\4\end{bmatrix}[/latex].
Определение: Однородным линейным уравнением называется уравнение, постоянный член которого равен нулю. Система линейных уравнений называется однородной, если каждое уравнение системы однородно. Однородная система имеет вид:
$$\begin{array}{cccc}
a_{11}x_{1}+a_{12}x_{2}+\cdots +a_{1n}x_{n} = 0\\
a_ {21}x_{1}+a_{22}x_{2}+\cdots +a_{2n}x_{n} = 0\\
\vdots \\
a_{m1}x_{1}+a_{m2 }x_{2}+\cdots +a_{mn}x_{n} = 0
\end{array}$$
Примечание: $$x_{1}=0, x_{2}=0, \cdots,x_{n} = 0$$ всегда является решением однородной системы уравнений.
Нулевое решение обычно называют тривиальным решением.
Теорема: Если в однородной системе линейных уравнений переменных больше, чем уравнений, то она имеет нетривиальное решение (фактически бесконечное множество).
1.3 Видео 4
Теорема: Система однородных уравнений имеет нетривиальное решение тогда и только тогда, когда уравнение имеет хотя бы одну свободную переменную.
1.3 Видео 5
Пример 2 : Определите, имеет ли следующая однородная система нетривиальное решение. Затем опишите набор решений.
$$\begin{array}{ccc}
x_{1}-3x_{2}+2x_{3} = 0\\
-2x_{1}+x_{2}-3x_{3} = 0\\
5x_{1}+7x_{3} = 0
\end{array}$$
1.3 Видео 6
Упражнение 2 . Определите, имеет ли следующая однородная система нетривиальное решение. Затем опишите набор решений.
Затем опишите набор решений.
$$\begin{array}{ccc}
-2x_{1}-3x_{2}+2x_{3} = 0\\
-x_{1}+6x_{2}+4x_{3} = 0\\
х_{1}-х_{2}-2х_{3} = 0
\end{array}$$
Определение: 1. Уравнение вида [latex]\vec{x} = s\vec{u}[/latex], где [latex]s[/latex] равны в [latex]\mathbb{R}[/latex] называется параметрическим векторным уравнением прямой. Уравнение вида [латекс]\vec{x} = s\vec{u} + t\vec{v}[/latex], где [латекс]s, t[/латекс] находятся в [латексе]\mathbb{ R}[/latex] называется параметрическим векторным уравнением плоскости, если [latex]\vec{u}[/latex] и [latex]\vec{v}[/latex] не являются скалярно кратными друг другу. 93[/латекс].
Примечание. Когда неоднородная линейная система имеет много решений, общее решение может быть записано в параметрической векторной форме как один вектор плюс произвольная линейная комбинация векторов, которые удовлетворяют соответствующей однородной системе.
Примечание. Геометрически мы можем думать о сложении векторов как о переносе. Мы говорим, что [latex]\vec{v}[/latex] переводится как [latex]\vec{p}[/latex] в [latex]\vec{v} + \vec{p}[/latex]. Более того, [latex]\vec{p} + t\vec{v}[/latex] — это параметрическое уравнение прямой, параллельной вектору [latex]\vec{v}[/latex], проходящей через точку, соответствующую [ латекс]\vec{p}[/латекс] 9Пример 4 {1}+x_{2}-3x_{3} = -3\\
Геометрически мы можем думать о сложении векторов как о переносе. Мы говорим, что [latex]\vec{v}[/latex] переводится как [latex]\vec{p}[/latex] в [latex]\vec{v} + \vec{p}[/latex]. Более того, [latex]\vec{p} + t\vec{v}[/latex] — это параметрическое уравнение прямой, параллельной вектору [latex]\vec{v}[/latex], проходящей через точку, соответствующую [ латекс]\vec{p}[/латекс] 9Пример 4 {1}+x_{2}-3x_{3} = -3\\
5x_{1}+7x_{3} = 5
\end{array}$$
1.3 Видео 8
Упражнение 4 . Опишите все решения
$$\begin{array}{cccc}
-2x_{1}-3x_{2}+2x_{3} = -10\\
x_{1}-x_{2}-2x_{3} = 3 9Пример 5 = 8\\
x_{1}+2x_{2}-2x_{3} = -3\\
-5x_{1}-5x_{2}+6x_{3} = 4
\end{массив}$$ Упражнение 5 -8\\
-x_{1}+8x_{2}+8x_{3} = -7\\
-x_{2}-2x_{3} = 3
\end{array}$$
Групповая работа 1: Отметьте каждое утверждение как верное или неверное. Обоснуйте каждый ответ.
а. Однородная система всегда непротиворечива.
б. Система однородных уравнений имеет тривиальное решение тогда и только тогда, когда
уравнение имеет хотя бы одну свободную переменную.
в. Уравнение [латекс]\vec{x} = \vec{p} + t\vec{v}[/latex] описывает прямую, проходящую через [латекс]\vec{v}[/латекс] параллельно [латекс]\vec {р}[/латекс]
Групповая работа 2. Рассмотрим следующие утверждения о системе линейных
а. Если система однородна, то каждое решение тривиально.
б. Если система имеет нетривиальное решение, то она не может быть однородной.
в. Если существует тривиальное решение, то система однородна.
д. Если система непротиворечива, она должна быть однородной.
Теперь предположим, что система однородна.
эл. Если существует нетривиальное решение, то нет тривиального решения.
ф. Если существует решение, то существует бесконечно много решений.
г. Если существуют нетривиальные решения, то строчно-ступенчатая форма A имеет строку нулей.
ч. Если строчно-ступенчатая форма матрицы A имеет строку нулей, то существуют нетривиальные
i. Если к системе применить операцию со строками, новая система также будет
однородной.
Групповая работа 3: [latex]A[/latex] — матрица коэффициентов системы уравнений, а
[latex]\vec{b}[/latex] — постоянный вектор. (a) имеет ли однородная система уравнений
нетривиальных решений и (b) имеет ли система уравнений хотя бы одно
решение для всех возможных [latex]\vec{b}[/latex].
(i) [latex]A[/latex] представляет собой матрицу [latex]3\times3[/latex] с тремя опорными позициями.
(a)
(b)
(ii) [latex]A[/latex] представляет собой матрицу [latex]4\times4[/latex] с тремя опорными позициями.
(a)
(b)
Групповая работа 4. В каждом случае определить, сколько решений (и сколько
с шестью переменными с дополненной матрица [латекс]А[/латекс]. Предположим, что [latex]A[/latex] имеет ненулевые записи. Дайте все возможности.
(a) ранг [латекс]A=2[/латекс]
(b) ранг [латекс]A=1[/латекс]
(c) [латекс]A[/латекс] имеет ряд нулей
(d) Эшелонная форма [latex]A[/latex] имеет ряд нулей.
Групповая работа 5. Найдите все значения [latex]a[/latex], для которых система имеет нетривиальные решения, и определите все решения.
$$\begin{array}{cccc}
x_{1}-2x_{2}+x_{3} = 0\\
x_{1}+ax_{2}-3x_{3} = 0 \
-x_{1}+6x_{2}-5x_{3} = 0
\end{массив}$$
Справочное руководство по матрице
: Матричные уравнения
Справочное руководство по матрице: Матричные уравненияПерейти к: Введение, Обозначения, Алфавитный указатель
Во всех приведенных ниже уравнениях x , y , z , X , Y и Z — неизвестные векторы или матрицы.
Дискретное время Ляпунова Уравнение
Уравнение Ляпунова с дискретным временем равно AXA H — X + Q = 0 , где Q эрмитово. Это частный случай уравнения Штейна.
- Существует единственное решение X тогда и только тогда ( eig ( A ) eig ( A ) H — 1 ) не имеет нулевые элементы, т. е. тогда и только тогда, когда нет собственного значения A является обратным собственное значение A H . Если это условие выполняется, то уникальный X является эрмитовым.
- Если A сходится, то X
- Если A сходится и Q является положительно определенным (или полуопределенным), тогда X является уникальным, эрмитовым и положительно определенным (или
полуопределенное).


Эквивалентным уравнением для систем с непрерывным временем является уравнение Ляпунова.
Дискретное уравнение Риккати
Дискретное уравнение Риккати – это квадратное уравнение [A, X: n#n; Б: н#м; С: м#н; R, Q: эрмитов] X = А Н ХА — ( C + B H XA ) H ( R + B H XB ) -1 ( C + B H XA ) + Q
Оптимизация квадратичной формы
Допустим H [ n # н ] = УДУ Н эрмитова, U унитарна и D =diag( d )=diag( eig ( H )) содержит собственные значения в
порядке убывания. Тогда соответствующая квадратичная форма является вещественной
выражение x H Hx .
- Куранта-Фишера Теорема: мин Вт макс x ( x В В x | x В x =1 и Ш [ n # k ] В x = 0 ) = мин. Вт макс. x ( x В В x ( x В x ) -1 | Ш [ n # k ] В x = 0 ) = d n — k и эта оценка достигается Ш = У :, н — к +1: н и y = u n-k [4.7].
- Рэлей-Ритц Теорема : макс. x ( x H Hx | x В x =1) = макс. x ( x H Hx ( x H x ) -1 | x != 0 ) = d 1 и мин x ( x В Hx | x В x =1)
= мин. x ( x H Hx ( x H x ) -1 | x != 0 ) = d n и эти границы достигнуты
на x = u 1 и y = u n соответственно [4.8].
 x ( x H Hx ( x H x ) -1 | x != 0 ) = d 1 и мин x ( x В Hx | x В x =1)
= мин. x ( x H Hx ( x H x ) -1 | x != 0 ) = d n и эти границы достигнуты
на x = u 1 и y = u n соответственно [4.8].
x ( x H Hx ( x H x ) -1 | x != 0 ) = d 1 и мин x ( x В Hx | x В x =1)
= мин. x ( x H Hx ( x H x ) -1 | x != 0 ) = d n и эти границы достигнуты
на x = u 1 и y = u n соответственно [4.8].Мы можем обобщить теорему Рэлея-Ритца на несколько измерений в любом двух способов, которые неожиданно оказались эквивалентными. Если W +ve определенно эрмитов и B эрмитов, тогда
где d — собственные значения W -1 B , отсортированные по порядке убывания, и эти оценки достигаются путем взятия столбцов X , чтобы быть соответствующими собственными векторами.
- макс. X tr(( X H WX ) -1 X H BX | ранг( х [ н # к ] )= к ) = сумма( d 1: k ) [4.
- макс. X det(( X H WX ) -1 X H BX | ранг( X [ n # k ] )= k ) = prod( d 1: k ) [4.12]
Линейный дискриминантный анализ (LDA) : Если векторы x генерируются случайным образом из ряда классов с B ковариация среднего класса и W средняя ковариация внутри каждого класса, то tr(( 9и det(( X H WX ) -1 X H BX две альтернативные меры класса) отделимость. Мы можем найти преобразование, уменьшающее размерность, которое максимизирует отделимость, взяв y = A T x , где столбцы A [ k # n ] являются собственными векторами W -1 B соответствующий k самый большой собственные значения.
 11]
11] Этот выбор максимизирует обе меры отделимости для любого заданного к .
Этот выбор максимизирует обе меры отделимости для любого заданного к .- Если W является определенным эрмитовым, а B эрмитовым и А [ n # м ] — заданная матрица, тогда
макс. X tr(([ A X ] H W [ A
X ]) -1 [ A X ] H B [ A X ] |
ранг([ A X [ n # k ] ])= m+k ) =
tr(( A H WA ) -1 A H ВА )
+ сумма( d 1: k ), где d
- собственные значения (I — A(A H WA) -1 A H W ) W -1 B отсортированы в порядке убывания, и этого максимума можно достичь, взяв
столбцы 90 398 X 90 399, чтобы быть соответствующими собственными векторами [4. 13].
- собственные значения V H F — H BF -1 V отсортированы в порядке убывания, где W=F H F и столбцы V являются ортонормированным базисом для нулевого пространства А Н Ж Н . Этот максимум может быть достигается путем взятия столбцов из X , чтобы быть соответствующими собственными векторами предварительно умноженное на F -1 V [4.14].
- собственные значения (I — A(A H WA) -1 A H W ) W -1 B отсортированы в порядке убывания, и этого максимума можно достичь, взяв
столбцы 90 398 X 90 399, чтобы быть соответствующими собственными векторами [4.
- Если W является определенным эрмитовым, а B является эрмитовым и A [ n # m ] — заданная матрица, тогда
max X det(([ A X ] H W [ A
Х ]) -1 [ А Х ] H B [ A X ] |
ранг([ A X [ n # k ] ])= m+k ) =
Det (( A H WA ) -1 A H BA ) × BA ) ×
6
BA ) × BA ). где l — собственные значения Вт -1 В ( И — А ( A H BA ) -1 A H B ) отсортированы по убыванию, и этого максимума можно достичь, взяв
столбцы X должны быть соответствующими собственными векторами. [4.15]
 13].
13]. где l — собственные значения Вт -1 В ( И — А ( A H BA ) -1 A H B ) отсортированы по убыванию, и этого максимума можно достичь, взяв
столбцы X должны быть соответствующими собственными векторами. [4.15]
где l — собственные значения Вт -1 В ( И — А ( A H BA ) -1 A H B ) отсортированы по убыванию, и этого максимума можно достичь, взяв
столбцы X должны быть соответствующими собственными векторами. [4.15]Линейное уравнение
Линейное уравнение имеет вид Ах — b = 0.
Точное решение
- [ A m # n ] Линейное уравнение имеет вид единственное точное решение тогда и только тогда, когда ранг([ A b ]) = ранк([ A ]) = n . решение: x = A -1 b .
- [ A m # n ] Линейное уравнение имеет
бесконечно много точных решений тогда и только тогда, когда rank([ A b ]) = rank([ A ]) <
н .
- Полный набор решений: x = x 0 + y где x 0 — любое решение, а y превышает нулевое значение. пространство A .

Метод наименьших квадратов
Если нет точного решения, мы можем найти x , которое минимизирует д = || Топор — б || = ( Топор — б ) Н ( Топор — б ).
- Размер x , минимизирующий d , определяется выражением x = A # b где A # любое обобщенная инверсия A .
- Из всех x , которые достигают минимума d , тот, у которого меньше всего || х || дается х = А + б где A + является псевдообратным A.
- [ранг( A m # n )= n ] Уникальный x , которое минимизирует d , равно x =
. Это х дает d = b H ( I m # m — A ( A H A ) -1 A H ) б.
- d равно нулю тогда и только тогда, когда ранг ([ A b ]) = n.
 Это х дает d = b H ( I m # m — A ( A H A ) -1 A H ) б.
Это х дает d = b H ( I m # m — A ( A H A ) -1 A H ) б. Рекурсивный метод наименьших квадратов
Мы можем выразить решение расширенного уравнения методом наименьших квадратов [ А ; U ] y — [b ; v ] = 0 с точки зрения наименьшего решение квадратов Ax — b = 0 .
[ранг( A m # n )= n ] Наименьший
Решение квадратов y = x + K ( v — Ux )
где x — решение методом наименьших квадратов для Ax — б = 0 и К =
( A H A ) -1 U H ( I + U ( A H A ) -1 У Н ) -1 . Инверсия расширенного граммиана задается как ([ A ; У ] Н [ А ; U ]) -1 =
( A H A ) -1 — KU ( A H A ) A A A.
Таким образом, для нахождения решения расширенного уравнения методом наименьших квадратов требуется
обращение матрицы,
( I + U ( A H A ) -1 U H ),
чья размерность равна количеству строк U вместо номера
ряды [ A ; У ]. Процесс особенно прост, если U имеет только один ряд. Расчет можно сократить за счет
численная устойчивость путем расчета
( А Х А ) -1 У Х как
( U ( A H A ) -1 ) H .
Инверсия расширенного граммиана задается как ([ A ; У ] Н [ А ; U ]) -1 =
( A H A ) -1 — KU ( A H A ) A A A.
Таким образом, для нахождения решения расширенного уравнения методом наименьших квадратов требуется
обращение матрицы,
( I + U ( A H A ) -1 U H ),
чья размерность равна количеству строк U вместо номера
ряды [ A ; У ]. Процесс особенно прост, если U имеет только один ряд. Расчет можно сократить за счет
численная устойчивость путем расчета
( А Х А ) -1 У Х как
( U ( A H A ) -1 ) H .
Уравнение Ляпунова
(непрерывное) уравнение Ляпунова AX + XA H + Q = 0 , где Q эрмитово. Это частный случай Сильвестра. уравнение.
- Существует единственное решение для X тогда и только тогда, когда нет собственного значения A имеет нулевая действительная часть и никакие два собственных значения не являются отрицательными комплексно-сопряженными числами каждого другой. Если это условие выполнено, то единственный X является эрмитовым.
- Если A стабильно, то X уникален и эрмитов и равен INTEGRAL ( EXP ( A t ) Q EXP ( A H t ), t =0..бесконечность)
- Если A стабильно, а Q стабильно
положительно определенное (или полуопределенное), то X уникально, эрмитово
и положительно определенные (или полуопределенные).
Эквивалентным уравнением для систем с дискретным временем является уравнение Штейна.
Уравнение Риккати
(Непрерывное) уравнение Риккати — это квадратное уравнение [A, X, C, D: n#n; C, D: эрмитов] XDX + XA + А Н Х — С = 0
Уравнение Штейна
Уравнение Штейна имеет вид AXB — X + Q = 0 .
- Существует уникальное решение для X iff ( eig ( A ) eig ( B ) T — 1 ) не имеет нулевые элементы, т. е. тогда и только тогда, когда нет собственного значения A является обратной величиной собственное значение B .
- AXB — X + Q = 0 эквивалентно линейному
уравнение ( И-КРОН ( Б Т , А )) х: = q: , где x: и q: содержат конкатенированные столбцы X и Q .