
Векторы движения — Windows drivers
Twitter LinkedIn Facebook Адрес электронной почты
- Статья
- Чтение занимает 2 мин
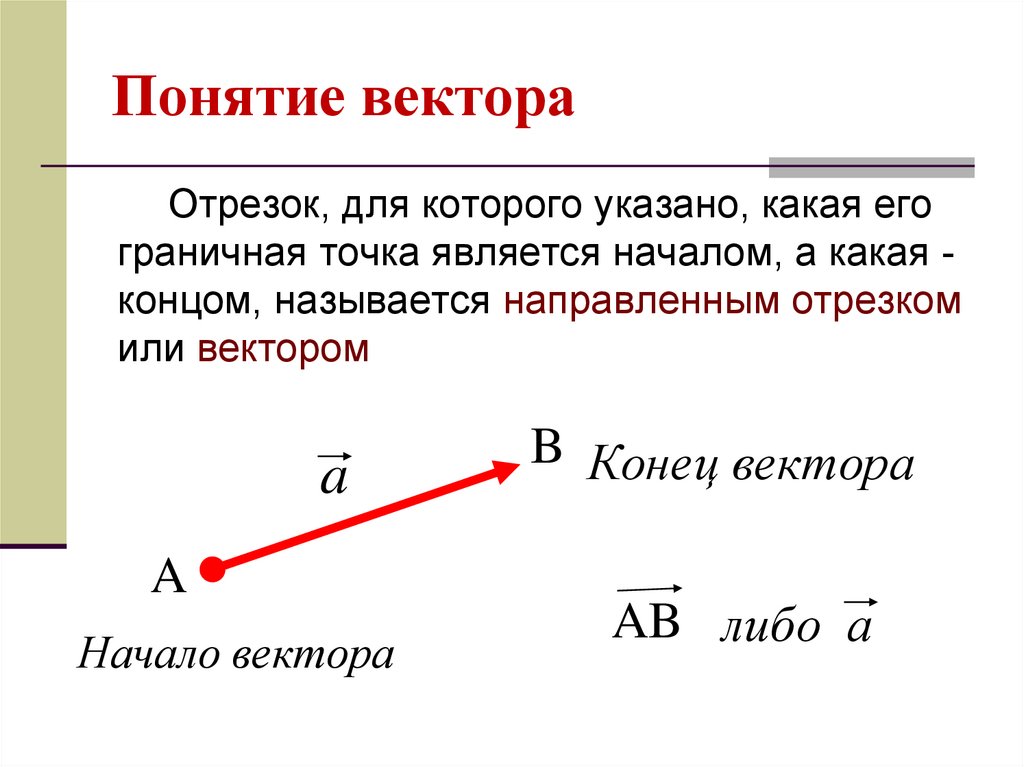
Если изображение не находится внутри рисунка (элемент бпиЦинтра структуры DXVA_PictureParameters равен нулю), векторы движения включаются в структуру команд элемента управления макроблокк. Количество векторов движения, включаемых в структуру, зависит от типа изображения (например, B Picture или P Picture). Кроме того, если используется выбор изображений на основе макроблокк (как определено в H. 263-приложении U), то для каждого вектора движения также включается индекс выбора изображения в структуре управляющей команды макроблокк.
Количество векторов движения, включаемых в структуру, зависит от типа изображения (например, B Picture или P Picture). Кроме того, если используется выбор изображений на основе макроблокк (как определено в H. 263-приложении U), то для каждого вектора движения также включается индекс выбора изображения в структуре управляющей команды макроблокк.
Пространство, зарезервированное для векторов движения в каждой структуре команд элемента управления макроблокк, обычно является объемом, необходимым для четырех векторов движения. Каждый вектор движения задается с помощью структуры DXVA_MVvalue . В этих обычных случаях есть два предыдущих невнутренних случая. Остальные варианты (не определены явно в файле заголовка дксва. h ) приведены ниже.
Если обмк используется (элемент бпикобмк структуры DXVA_PictureParameters равен 1), а рисунок не является частью статьи Pb (элемент бпикбинпб этой структуры равен нулю), пространство для 10 векторов движения, а также дополнительное пространство, необходимое для выровняйте по 16-байтовой границе, включено.

Если ОБМК используется (элемент бпикобмк структуры DXVA_PictureParameters равен 1), а рисунок является частью статьи Pb (элемент бпикбинпб этой структуры равен 1), пространство для 11 векторов движения, а также дополнительное пространство, необходимое для совмещения с 16-байтовой границей, включено.
Если ОБМК не используется (элемент бпикобмк структуры DXVA_PictureParameters равен нулю), рисунок является частью статьи Pb (элемент

физика — Вектор напряжения — Тензор напряжения
спросил
Изменено 7 лет, 2 месяца назад
Просмотрено 4к раз
$\begingroup$
Является ли определение вектора напряжения следующим?
Вектор напряжения – это сила, приходящаяся на единицу поверхности.
Тензор напряжений представляет собой матрицу $\{\sigma_{ij}(x,t)\}$, а ее $(i,j)$-компонента представляет собой $i$-компоненту силы, приходящейся на единицу поверхности, т.е. действующее на элемент поверхности, перпендикулярный направлению $j$. Правильно ли это определение тензора напряжений?
Какова форма тензора напряжений в спокойной жидкости?
Является ли определение (статического) давления следующим? (Статическое) давление — это диагональные элементы тензорной матрицы.
- физика
- классическая механика
- гидродинамика
$\endgroup$
1
$\begingroup$
Ваше определение тензора напряжений кажется правильным. Если вы разрезаете напряженное тело, тензор напряжений имеет компонентный вектор, действующий поперек поверхности разреза. Его иногда называют «вектором напряжения», но лучше его назвать «вектором тяги», причем слово «напряжение» зарезервировано для тензора.
Дополнительно: в нотации Фойгта напряжение представлено матрицей-столбцом, также иногда называемой «вектором напряжения». Это чисто условное обозначение, позволяющее нам записать тензор упругости (4-го порядка) на плоском листе бумаги; напряжение является собственно тензором (2-го порядка).
$\endgroup$
$\begingroup$
Ваше определение верное. У тензора есть два направления: к одному приложена сила, а к другому измеряется/чувствуется. Когда {i, j} обозначают одно и то же направление, мы имеем нормальное напряжение. Когда отличается, напряжение сдвига.
Векторы обычно записываются в столбец, два нормальных и один поперечный, а тензоры — в квадратную матрицу.
В механике жидкости и механике материалов ситуация практически одинакова. В последнем случае, когда одно и то же гидростатическое напряжение действует по трем направлениям (записанным на элементах главной диагонали, сохраняя все остальные элементы сдвига равными нулю), разрушение не может произойти. По сути, это сдвиговое действие при сдвиговом напряжении или напряжении фон Мизеса, смоделированное на основе этих теорий разрушения.
По сути, это сдвиговое действие при сдвиговом напряжении или напряжении фон Мизеса, смоделированное на основе этих теорий разрушения.
РЕДАКТИРОВАТЬ 1:
В теории пластичности этот отказ, вызывающий разностный компонент, представляет собой девиатрический тензор напряжений.
$\endgroup$
$\begingroup$
Существуют также более сложные нелинейные конститутивные процессы, такие как жидкости Ривлина-Эриксона.
$\endgroup$
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но никогда не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
Векторы тяги
Введение
Ссылка: http://commons.wikimedia.org/wiki/Файл:stress_vector.svg
Вектор тяги , \({\bf T}\), это просто вектор силы на поперечном сечении, деленном на площадь этого поперечного сечения.
\[
{\bf T} = {{\bf F} \over \text{Область}}
\]
Обратите внимание, что направление вектора тяги всегда совпадает с вектором внутренней силы. С изменением угла среза меняется только его величина.
Нормальные напряжения и напряжения сдвига
Нормальные и касательные напряжения — это просто компоненты вектора тяги. которые являются нормальными и параллельными поверхности области, как показано на рисунке.
Используя \({\bf n}\) для единичного вектора нормали к поверхности, и
\({\bf s}\) для единичного вектора, параллельного ему, означает, что
которые являются нормальными и параллельными поверхности области, как показано на рисунке.
Используя \({\bf n}\) для единичного вектора нормали к поверхности, и
\({\bf s}\) для единичного вектора, параллельного ему, означает, что
\[
\sigma = {\bf T} \cdot {\bf n} \qquad \text{and} \qquad \tau = {\bf T} \cdot {\bf s}
\]
Очень важно понимать, что \(\sigma\) и \(\tau\) здесь
каждое скалярное значение, а не полные тензоры. Это естественный результат
операции скалярного произведения с участием \({\bf T}\), \({\bf n}\) и
\({\bf с}\). (Скалярные произведения дают скалярные результаты.)
Значения нормального напряжения и напряжения сдвига здесь являются скалярами, а не тензорами, потому что это всего лишь две отдельные компоненты полного тензора напряжений. 9\круг,\; 0) = -4,33 \, \text{МПа} \]
Тензоры напряжений и векторы тяги
Зависимость вектора тяги от напряженного состояния при
точка получается непосредственно из задания суммы
силы на объект, равные нулю, т. е. устанавливающие равновесие.
е. устанавливающие равновесие.
\[
\sigma_{xx} \, A \, \cos \theta + \tau_{xy} \, A \, \sin \theta = T_x \, A
\]
\[
\tau_{xy} \, A \, \cos \theta + \sigma_{yy} \, A \, \sin \theta = T_y \, A
\]
\[
\sigma_{xx} \, \cos\theta + \tau_{xy} \, \sin\theta = T_x
\]
\[
\tau_{xy} \, \cos\theta + \sigma_{yy} \, \sin\theta = T_y
\]
, но \(\cos\theta\) и \(\sin\theta\) являются
компоненты устройства, нормальные к поверхности,
\({\bf n} = (\cos\theta, \sin\theta)\), что
\({\bf T}\) действует.
Замена \(\cos \theta\) и \(\sin \theta\) на \(n_x\) и \(n_y\) дает
\[
\sigma_{xx} \, n_x + \tau_{xy} \, n_y = T_x
\]
\[
\tau_{xy} \, n_x + \sigma_{yy} \, n_y = T_y
\]
Оба уравнения можно резюмировать как
\[
{\bf T} = \boldsymbol{\sigma} \cdot {\bf n}
\]
или в тензорной записи как
\[
T_i = \sigma_{ij} \, n_j
\]
Приведенные выше уравнения очень полезны, компактны, имеют матричные и тензорные обозначения. представления уравнений равновесия. Полные уравнения в 3-D,
находятся
представления уравнений равновесия. Полные уравнения в 3-D,
находятся
\[
\sigma_{xx} \, n_x + \tau_{xy} \, n_y + \tau_{xz} \, n_z = T_x
\]
\[
\tau_{yx} \, n_x + \sigma_{yy} \, n_y + \tau_{yz} \, n_z = T_y
\]
\[
\tau_{zx} \, n_x + \tau_{zy} \, n_y + \sigma_{zz} \, n_z = T_z
\]
Термин тензорной записи, \(\sigma_{ij} \, n_j\), приводит к
девять отдельных компонентов напряжения. Например, оба \(\sigma_{xz}\)
и \(\sigma_{zx}\) присутствуют выше, и оба всегда равны.
Фактически это характерно для всех уравнений, включающих напряжение и деформацию.
Вектор тяги из тензора напряжений
С учетом тензора напряжений (в МПа)
\[
\boldsymbol{\сигма} =
\слева[ \матрица{
50 и 10 и 30 \\
10 и 95 и 20\
30 и 20 и 15 }
\Правильно]
\]
Рассчитать вектор тяги на поверхности с единичной нормалью
\({\bf n} = (0,400, \, 0,600, \, 0,693)\).
\[
\слева\{ \матрица{
Т_х\Т_у\Т_з}
\Правильно\}
знак равно
\слева[ \матрица{
50 и 10 и 30 \\
10 и 95 и 20\
30 и 20 и 15 }
\Правильно]
\слева\{ \матрица{
0,400\0,600\0,693}
\Правильно\}
знак равно
\слева\{ \матрица{
46,79\74,86\34,40}
\Правильно\}
\]
Итак, \({\bf T} = 46,79 \, {\bf i} + 74,86 \, {\bf j} + 34,40 \, {\bf k} \, \text{МПа}\).
Если площадь равна 100 мм 2 , то сила на ней будет \({\bf F} = 4679 \, {\bf i} + 7486 \, {\bf j} + 3440 \, {\bf k} \, \text{N}\).
Трансформация напряжения
В этом разделе вводится аспект координатных преобразований тензоров напряжений. это подмножество общего случая, который будет рассмотрен позже. Это делается с помощью объединение различных уравнений, включающих вектор тяги.
Напомним, что нормальные и касательные напряжения на поверхности связаны к вектору тяги на
\[
\sigma = {\bf T} \cdot {\bf n} \qquad \text{and} \qquad \tau = {\bf T} \cdot {\bf s}
\]
Напомним, что нормальные и касательные напряжения здесь — просто скалярные величины на поверхности,
не полный тензор напряжений.
Но мы также видели, что вектор тяги связан с полным тензором напряжений соотношением
\[
{\bf T} = \boldsymbol{\sigma} \cdot {\bf n}
\]
Подстановка этого уравнения для \({\bf T}\) в приведенные выше дает
\[
\sigma = {\bf n} \cdot \boldsymbol{\sigma} \cdot {\bf n} \qquad \text{and} \qquad
\ тау = {\ bf s} \ cdot \boldsymbol {\ sigma} \ cdot {\ bf n}
\]
В тензорной записи уравнения
\[
\sigma = \sigma_{ij} \, n_i \, n_j \qquad \text{and} \qquad
\тау = \sigma_{ij} \, s_i \, n_j
\]
Они представляют собой очень полезные соотношения между тензором напряжений в глобальной
система координат и компоненты нормального напряжения и напряжения сдвига в любой другой
ориентация.
Пример преобразования напряжения
Напомним приведенный выше тензор напряжений
\[
\boldsymbol{\сигма} =
\слева[ \матрица{
50 и 10 и 30 \\
10 и 95 и 20\\
30 и 20 и 15 }
\Правильно]
\]
Мы рассчитали вектор тяги на поверхности с единичной нормалью
\({\bf n} = (0,400, \, 0,600, \, 0,693)\). На этот раз рассчитайте
нормальные и касательные напряжения на этой поверхности.
Нормальное напряжение на поверхности равно
\[
\begin{выравнивание}
\сигма
& \; знак равно &
\матрица{
\влево\{ 0,400 \;\; 0,600 \;\; 0,693 \справа\} \\
\\
\\
}
\слева[ \матрица{
50 и 10 и 30 \\
10 и 95 и 20\
30 и 20 и 15 }
\Правильно]
\слева\{ \матрица{
0,400\0,600\0,693 }
\Правильно\}
\\
\\
знак равно
87,47 \text{ МПа}
\end{эквнаррай}
\]
Чтобы вычислить касательное напряжение, нам сначала нужно конкретное из бесконечного
число единичных векторов, параллельных поверхности. Давайте выберем
\({\bf s} = (-0,832, \, 0,555, \, 0,000)\). Скалярный продукт подтвердит, что
этот вектор перпендикулярен \({\bf n}\).
\[
\begin{выравнивание}
\тау
& \; знак равно &
\матрица{
\слева\{ -0,832 \;\; 0,555 \;\; 0.000 \справа\} \\
\\
\\
}
\слева[ \матрица{
50 и 10 и 30 \\
10 и 95 и 20\\
30 и 20 и 15 }
\Правильно]
\слева\{ \матрица{
0,400\0,600\0,693}
\Правильно\}
\\
\\
знак равно
2,62 \text{ МПа}
\end{эквнаррай}
\]
Таким образом, на этой грани очень небольшой сдвиг в заданном s направлении .
Но это не значит, что на лице вообще нет сдвига. Чтобы увидеть это, выберите
второе направление параллельно поверхности и перпендикулярно первому s .
Получите это путем пересечения единичного вектора нормали с первым касательным вектором.
\[
\begin{выравнивание}
{\bf n} \times {\bf s} \; знак равно (0,400 \, {\bf i} + 0,600 \, {\bf j} + 0,693 \, {\bf k})
\times (-0,832 \, {\bf i} + 0,555 \, {\bf j} + 0,000 \, {\bf k}) \\
\\
знак равно
-0,385 \, {\bf i} — 0,576 \, {\bf j} + 0,721 \, {\bf k} \\
\end{эквнаррай}
\]
Таким образом, сдвиг в направлении, перпендикулярном первому, равен
\[
\begin{выравнивание}
\тау
& \; знак равно &
\матрица{
\left\{ \text{-}0,385 \;\; \text{-}0,576 \;\; 0,721 \справа\} \\
\\
\\
}
\слева[ \матрица{
50 и 10 и 30 \\
10 и 95 и 20\\
30 и 20 и 15 }
\Правильно]
\слева\{ \матрица{
0,400\0,600\0,693}
\Правильно\}
\\
\\
знак равно
-36,33 \text{ МПа}
\end{эквнаррай}
\]
Таким образом, в этом перпендикулярном направлении существует значительное напряжение сдвига.