Вычислить проекции вектора на оси координат. Калькулятор онлайн.Вычисление проекции вектора на вектор
Алгебраическая проекция вектора на какую-либо ось равна произведению длины вектора на косинус угла между осью и вектором:
Пр a b = |b|cos(a,b) или
Где a b — скалярное произведение векторов , |a| — модуль вектора a .
Инструкция . Для нахождения проекции вектора Пp a b в онлайн режиме необходимо указать координаты векторов a и b . При этом вектор может быть задан на плоскости (две координаты) и в пространстве (три координаты). Полученное решение сохраняется в файле Word . Если векторы заданы через координаты точек, то необходимо использовать этот калькулятор .
Заданы :две координаты вектора
три координаты вектора
a: ; ;
b: ; ;
Классификация проекций вектора
Виды проекций по определению проекция вектора
Виды проекций по системе координат
Свойства проекции вектора
- Геометрическая проекция вектора есть вектор (имеет направление).

- Алгебраическая проекция вектора есть число.

Теоремы о проекциях вектора
Теорема 1 . Проекция суммы векторов на какую-либо ось равна проекции слагаемых векторов на ту же ось.
Теорема 2 . Алгебраическая проекция вектора на какую-либо ось равна произведению длины вектора на косинус угла между осью и вектором:
Пр a b = |b|cos(a,b)
Виды проекций вектора
- проекция на ось OX.
- проекция на ось OY.
- проекция на вектор.
| Проекция на ось OX | Проекция на ось OY | Проекция на вектор |
| Если направление вектора A’B’ совпадает с направлением оси OX, то проекция вектора A’B’ имеет положительный знак. | Если направление вектора A’B’ совпадает с направлением оси OY, то проекция вектора A’B’ имеет положительный знак. | Если направление вектора A’B’ совпадает с направлением вектора NM, то проекция вектора A’B’ имеет положительный знак. |
| Если направление вектора противоположно с направлением оси OX, то проекция вектора A’B’ имеет отрицательный знак. | Если направление вектора A’B’ противоположно с направлением оси OY, то проекция вектора A’B’ имеет отрицательный знак. | Если направление вектора A’B’ противоположно с направлением вектора NM, то проекция вектора A’B’ имеет отрицательный знак. |
| Если вектор AB параллелен оси OX, то проекция вектора A’B’ равна модулю вектора AB. | Если вектор AB параллелен оси OY, то проекция вектора A’B’ равна модулю вектора AB. | Если вектор AB параллелен вектору NM, то проекция вектора A’B’ равна модулю вектора AB. |
| Если вектор AB перпендикулярен оси OX, то проекция A’B’ равна нулю (нуль-вектор). | Если вектор AB перпендикулярен оси OY, то проекция A’B’ равна нулю (нуль-вектор). | Если вектор AB перпендикулярен вектору NM, то проекция A’B’ равна нулю (нуль-вектор). |
1. Вопрос: Может ли проекция вектора иметь отрицательный знак. Ответ: Да, проекций вектора может быть отрицательной величиной. В этом случае, вектор имеет противоположное направление (см. как направлены ось OX и вектор AB)
2. Вопрос: Может ли проекция вектора совпадать с модулем вектора. Ответ: Да, может. В этом случае, векторы параллельны (или лежат на одной прямой).
3. Вопрос: Может ли проекция вектора быть равна нулю (нуль-вектор). Ответ: Да, может. В этом случае вектор перпендикулярен соответствующей оси (вектору).
Пример 1
. Вектор (рис. 1) образует с осью OX (она задана вектором a) угол 60 о. Если OE есть единица масштаба, то |b|=4, так что .
Действительно, длина вектора (геометрической проекции b) равна 2, а направление совпадает с направлением оси OX.
Пример 2
. Вектор (рис. 2) образует с осью OX (с вектором a) угол (a,b) = 120 o . Длина |b| вектора b равна 4, поэтому пр a b=4·cos120 o = -2.
Действительно, длина вектора равна 2, а направление противоположно направлению оси.

Проектирование различных линий и поверхностей на плоскость позволяет построить наглядное изображение предметов в виде чертежа. Будем рассматривать прямоугольное проектирование, при котором проектирующие лучи перпендикулярны плоскости проекции. ПРОЕКЦИЕЙ ВЕКТОРА НА ПЛОСКОСТЬ считают вектор = (рис. 3.22), заключенный между перпендикулярами, опущенными из его начала и конца.
Рис. 3.22. Векторная проекция вектора на плоскость.
Рис. 3.23. Векторная проекция вектора на ось.
В векторной алгебре часто приходится проектировать вектор на ОСЬ, то есть на прямую, имеющую определенную ориентацию. Такое проектирование выполняется легко, если вектор и ось L лежат в одной плоскости (рис. 3.23). Однако задача усложняется, когда это условие не выполнено. Построим проекцию вектора на ось, когда вектор и ось не лежат в одной плоскости (рис. 3.24).
Построим проекцию вектора на ось, когда вектор и ось не лежат в одной плоскости (рис. 3.24).
Рис. 3.24. Проектирование вектора на ось
в общем случае.
Через концы вектора проводим плоскости, перпендикулярные прямой L. В пересечении с этой прямой данные плоскости определяют две точки А1 и B1 — вектор , который будем называть векторной проекцией данного вектора. Задача нахождения векторной проекции может быть решена проще, если вектор приведен в одну плоскость с осью, что возможно осуществить, так как в векторной алгебре рассматриваются свободные векторы.
Наряду с векторной проекцией, существует и СКАЛЯРНАЯ ПРОЕКЦИЯ, которая равна модулю векторной проекции, если векторная проекция совпадает с ориентацией оси L, и равна величине, ей противоположной, если векторная проекция и ось L имеют противоположную ориентацию. Скалярную проекцию будем обозначать:
Векторная и скалярная проекции не всегда терминологически разделяются строго на практике. Обычно пользуются термином «проекция вектора», подразумевая под этим скалярную проекцию вектора. При решении же необходимо четко эти понятия различать. Следуя установившейся традиции, будем использовать термины «проекция вектора», подразумевая скалярную проекцию, и «векторная проекция» — в соответствии с установленным смыслом.
При решении же необходимо четко эти понятия различать. Следуя установившейся традиции, будем использовать термины «проекция вектора», подразумевая скалярную проекцию, и «векторная проекция» — в соответствии с установленным смыслом.
Докажем теорему, позволяющую вычислять скалярную проекцию заданного вектора.
ТЕОРЕМА 5. Проекция вектора на ось L равна произведению его модуля на косинус угла между вектором и осью, то есть
(3.5)
Рис. 3.25. Нахождение векторной и скалярной
Проекций вектора на ось L
( и ось L одинаково ориентированы).
ДОКАЗАТЕЛЬСТВО . Выполним предварительно построения, позволяющие найти угол G Между вектором и осью L. Для этого построим прямую MN, параллельную оси L и проходящую через точку О — начало вектора (рис. 3.25). Угол и будет искомым углом. Проведем через точки А и О две плоскости, перпендикулярные оси L. Получим:
Так как ось L и прямая MN параллельны.
Выделим два случая взаимного расположения вектора и оси L.
1. Пусть векторная проекция и ось L одинаково ориентированны (рис. 3.25). Тогда соответствующая скалярная проекция .
2. Пусть и L ориентированы в разные стороны (рис. 3.26).
Рис. 3.26. Нахождение векторной и скалярной проекций вектора на ось L ( и ось L ориентированы в противоположные стороны).
Таким образом, в обоих случаях справедливо утверждение теоремы.
ТЕОРЕМА 6. Если начало вектора приведено к некоторой точке оси L, и эта ось расположена в плоскости s, вектор образует с векторной проекцией на плоскость s угол , а с векторной проекцией на ось L — угол , кроме того сами векторные проекции образуют между собой угол , то
а на ось или какой-либо другой вектор существуют понятия ее геометрической проекции и числовой (или алгебраической) проекции. Результатом геометрической проекции будет вектор, а результатом алгебраической – неотрицательное действительное число. Но перед тем, как перейти к этим понятиям вспомним необходимую информацию.
Предварительные сведения
Основное понятие – непосредственно понятие вектора. Для того, чтобы ввести определение геометрического вектора вспомним, что такое отрезок . Введем следующее определение.
Для того, чтобы ввести определение геометрического вектора вспомним, что такое отрезок . Введем следующее определение.
Определение 1
Отрезком будем называть часть прямой, которая имеет две границы в виде точек.
Отрезок может иметь 2 направления. Для обозначения направления будем называть одну из границ отрезка его началом, а другую границу — его концом. Направление указывается от его начала к концу отрезка.
Определение 2
Вектором или направленным отрезком будем называть такой отрезок, для которого известно, какая из границ отрезка считается началом, а какая его концом.
Обозначение: Двумя буквами: $\overline{AB}$ – (где $A$ его начало, а $B$ – его конец).
Одной маленькой буквой: $\overline{a}$ (рис. 1).
Введем еще несколько понятий, связанных с понятием вектора.
Определение 3
Два ненулевых вектора будем называть коллинеарными, если они лежат на одной и той же прямой или на прямых, параллельных друг другу (рис.2).
Определение 4
Два ненулевых вектора будем называть сонаправленными, если они удовлетворяют двум условиям:
- Эти векторы коллинеарны.
- Если они будут направлены в одну сторону (рис. 3).

Обозначение: $\overline{a}\overline{b}$
Определение 5
Два ненулевых вектора будем называть противоположно направленными, если они удовлетворяют двум условиям:
- Эти векторы коллинеарны.
- Если они направлены в разные стороны (рис. 4).
Обозначение: $\overline{a}↓\overline{d}$
Определение 6
Длиной вектора $\overline{a}$ будем называть длину отрезка $a$.
Обозначение: $|\overline{a}|$
Перейдем к определению равенства двух векторов
Определение 7
Два вектора будем называть равными, если они удовлетворяют двух условиям:
- Они сонаправлены;
- Их длины равны (рис. 5).
Геометрическая проекция
Как мы уже сказали ранее, результатом геометрической проекции будет вектор.
Определение 8
Геометрической проекцией вектора $\overline{AB}$ на ось будем называть такой вектор, который получается следующим образом: Точка начала вектора $A$ проецируется на данную ось. Получаем точку $A»$ — начало искомого вектора. Точка конца вектора $B$ проецируется на данную ось. Получаем точку $B»$ — конец искомого вектора. Вектор $\overline{A»B»}$ и будет искомым вектором.
Получаем точку $A»$ — начало искомого вектора. Точка конца вектора $B$ проецируется на данную ось. Получаем точку $B»$ — конец искомого вектора. Вектор $\overline{A»B»}$ и будет искомым вектором.
Рассмотрим задачу:
Пример 1
Постройте геометрическую проекцию $\overline{AB}$ на ось $l$, изображенные на рисунке 6.
Проведем из точки $A$ перпендикуляр к оси $l$, получим на ней точку $A»$. Далее проведем из точки $B$ перпендикуляр к оси $l$, получим на ней точку $B»$ (рис. 7).
Пусть в пространстве даны два вектора и . Отложим от произвольной точки O векторы и . Углом между векторами и называется наименьший из углов . Обозначается .
Рассмотрим ось l и отложим на ней единичный вектор (т.е. вектор, длина которого равна единице).
Под углом между вектором и осью l понимают угол между векторами и .
Итак, пусть l – некоторая ось и – вектор.
Обозначим через A 1 и B 1 проекции на ось l соответственно точек A и B . Предположим,
что A 1 имеет координату x 1 , а B 1 – координату x 2 на оси l .
Предположим,
что A 1 имеет координату x 1 , а B 1 – координату x 2 на оси l .
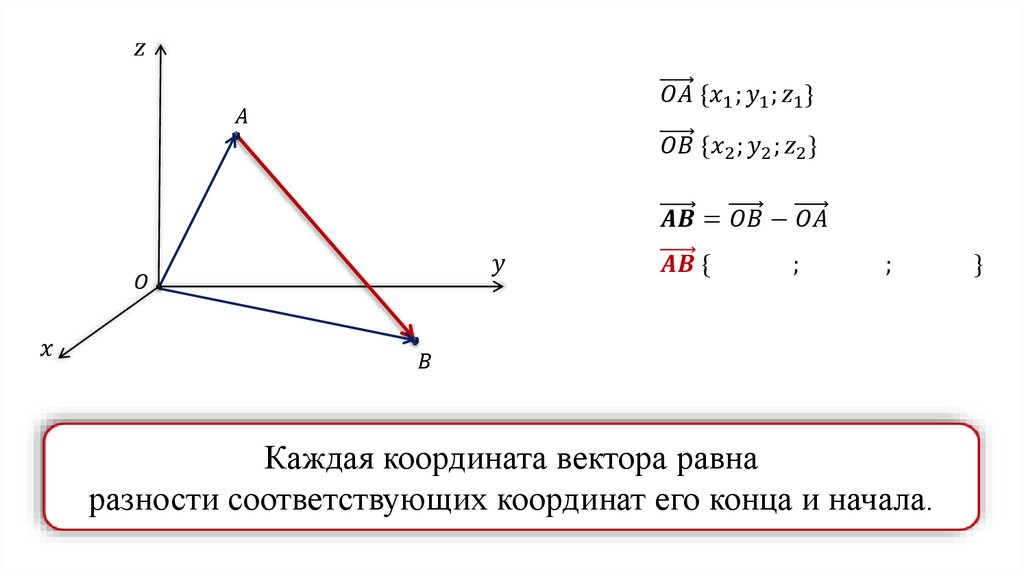
Тогда проекцией вектора на ось l называется разность x 1 – x 2 между координатами проекций конца и начала вектора на эту ось.
Проекцию вектора на ось l будем обозначать .
Ясно, что если угол между вектором и осью l острый, то x 2 > x 1 , и проекция x 2 – x 1 > 0; если этот угол тупой, то x 2 x 1 и проекция x 2 – x 1 l , то x 2 = x 1 и x 2 – x 1 =0.
Таким образом, проекция вектора на ось l – это длина отрезка A 1 B 1 , взятая с определённым знаком. Следовательно, проекция вектора на ось это число или скаляр.
Аналогично определяется проекция одного вектора на другой. В этом случае находятся проекции концов даного вектора на ту прямую, на которой лежит 2-ой вектор.
Рассмотрим некоторые основные свойства проекций .
ЛИНЕЙНО ЗАВИСИМЫЕ И ЛИНЕЙНО НЕЗАВИСИМЫЕ СИСТЕМЫ ВЕКТОРОВ
Рассмотрим несколько векторов .
Линейной комбинацией данных векторов называется любой вектор вида , где — некоторые числа. Числа называются коэффициентами линейной комбинации. Говорят также, что в этом случае линейно выражается через данные векторы , т.е. получается из них с помощью линейных действий.
Например, если даны три вектора то в качестве их линейной комбинации можно рассматривать векторы:
Если вектор представлен как линейная комбинация каких-то векторов, то говорят, что он разложен по этим векторам.
Векторы называются линейно зависимыми , если существуют такие числа, не все равные нулю, что . Ясно, что заданные векторы будут линейно зависимыми, если какой-либо из этих векторов линейно выражается через остальные.
В противном случае, т.е. когда соотношение выполняется только при , эти векторы называются линейно независимыми .
Теорема 1. Любые два вектора линейно зависимы тогда и
только тогда, когда они коллинеарны.
Любые два вектора линейно зависимы тогда и
только тогда, когда они коллинеарны.
Доказательство :
Аналогично можно доказать следующую теорему.
Теорема 2. Три вектора линейно зависимы тогда и только тогда, когда они компланарны.
Доказательство .
БАЗИС
Базисом называется совокупность отличных от нулей линейно независимых векторов. Элементы базиса будем обозначать .
В предыдущем пункте мы видели, что два неколлинеарных вектора на плоскости линейно независимы. Поэтому согласно теореме 1, из предыдущего пункта, базисом на плоскости являются любые два неколлинеарных вектора на этой плоскости.
Аналогично в пространстве линейно независимы любые три некомпланарных вектора. Следовательно, базисом в пространстве назовём три некомпланарных вектора.
Справедливо следующее утверждение.
Теорема. Пусть в пространстве
задан базис . Тогда любой вектор можно представить в
виде линейной комбинации , где x , y , z – некоторые числа.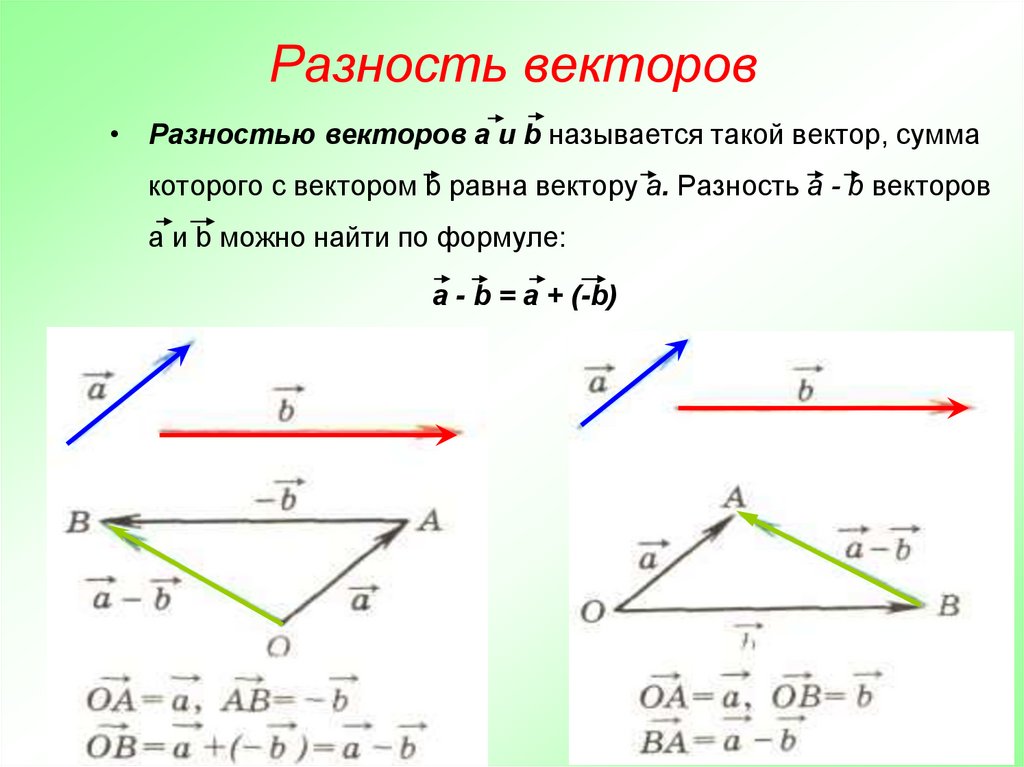 Такое разложение единственно.
Такое разложение единственно.
Доказательство .
Таким образом, базис позволяет однозначно сопоставить каждому вектору тройку чисел – коэффициенты разложения этого вектора по векторам базиса: . Верно и обратное, каждой тройке чисел x, y, z при помощи базиса можно сопоставить вектор, если составить линейную комбинацию .
Если базис и , то числа x, y, z называются координатами вектора в данном базисе. Координаты вектора обозначают .
ДЕКАРТОВА СИСТЕМА КООРДИНАТ
Пусть в пространстве задана точка O и три некомпланарных вектора .
Декартовой системой координат в пространстве (на плоскости) называется совокупность точки и базиса, т.е. совокупность точки и трёх некомпланарных векторов (2-х неколлинеарных векторов), выходящих из этой точки.
Точка O называется началом координат; прямые, проходящие через начало координат в направлении базисных векторов, называются
осями координат – осью абсцисс, ординат и аппликат.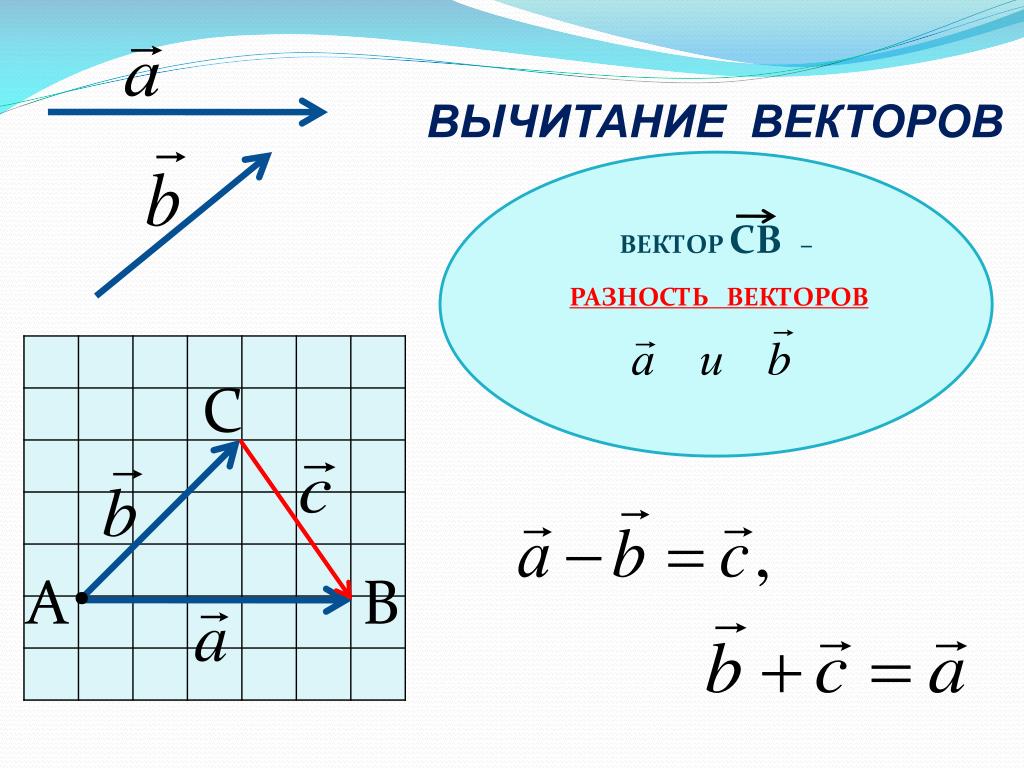 Плоскости, проходящие через оси координат, называют координатными плоскостями.
Плоскости, проходящие через оси координат, называют координатными плоскостями.
Рассмотрим в выбранной системе координат произвольную точку M . Введём понятие координаты точки M . Вектор , соединяющий начало координат с точкой M . называется радиус-вектором точки M .
Вектору в выбранном базисе можно сопоставить тройку чисел – его координаты: .
Координаты радиус-вектора точки M . называются координатами точки M . в рассматриваемой системе координат. M(x,y,z) . Первая координата называется абсциссой, вторая – ординатой, третья – аппликатой.
Аналогично определяются декартовы координаты на плоскости. Здесь точка имеет только две координаты – абсциссу и ординату.
Легко видеть, что при заданной системе координат каждая точка имеет определённые координаты. С другой стороны, для каждой тройки чисел найдётся единственная точка, имеющая эти числа в качестве координат.
Если векторы, взятые в качестве базиса, в выбранной системе координат, имеют
единичную длину и попарно перпендикулярны, то система координат называется декартовой прямоугольной.
Несложно показать, что .
Направляющие косинусы вектора полностью определяют его направление, но ничего не говорят о его длине.
Введение…………………………………………………………………………3
1. Значение вектора и скаляра………………………………………….4
2. Определение проекции, оси и координатой точки…………………5
3. Проекция вектора на ось………………………………………………6
4. Основная формула векторной алгебры……………………………..8
5. Вычисление модуля вектора по его проекциям……………………9
Заключение………………………………………………………………………11
Литература………………………………………………………………………12
Введение:
Физика неразрывно связана с математикой. Математика дает физике средства и приемы общего и точного выражения зависимости между физическими величинами, которые открываются в результате эксперимента или теоретических исследований.Ведь основной метод исследований в физике – экспериментальный. Это значит – вычисления ученый выявляет с помощью измерений. Обозначает связь между различными физическими величинами. Затем, все переводится на язык математики. Формируется математическая модель. Физика — есть наука, изучающая простейшие и вместе с тем наиболее общие закономерности. Задача физики состоит в том, чтобы создать в нашем сознании такую картину физического мира, которая наиболее полно отражает свойства его и обеспечивает такие соотношения между элементами модели, какие существуют между элементами.
Обозначает связь между различными физическими величинами. Затем, все переводится на язык математики. Формируется математическая модель. Физика — есть наука, изучающая простейшие и вместе с тем наиболее общие закономерности. Задача физики состоит в том, чтобы создать в нашем сознании такую картину физического мира, которая наиболее полно отражает свойства его и обеспечивает такие соотношения между элементами модели, какие существуют между элементами.
Итак, физика создает модель окружающего нас мира и изучает ее свойства. Но любая модель является ограниченной. При создании моделей того или иного явления принимаются во внимание только существенные для данного круга явлений свойства и связи. В этом и заключается искусство ученого — из всего многообразия выбрать главное.
Физические модели являются математическими, но не математика является их основой. Количественные соотношения между физическими величинами выясняются в результате измерений, наблюдений и экспериментальных исследований и лишь выражаются на языке математики. Однако другого языка для построения физических теорий не существует.
Однако другого языка для построения физических теорий не существует.
1. Значение вектора и скаляра.
В физике и математике вектор — это величина, которая характеризуется своим численным значением и направлением. В физике встречается немало важных величин, являющихся векторами, например сила, положение, скорость, ускорение, вращающий момент, импульс, напряженность электрического и магнитного полей. Их можно противопоставить другим величинам, таким, как масса, объем, давление, температура и плотность, которые можно описать обычным числом, и называются они «скалярами» .
Они записываются либо буквами обычного шрифта, либо цифрами (а, б, t, G, 5, −7….). Скалярные величины могут быть положительными и отрицательными. В то же время некоторые объекты изучения могут обладать такими свойствами, для полного описания которых знание только числовой меры оказывается недостаточным, необходимо ещё охарактеризовать эти свойства направлением в пространстве. Такие свойства характеризуются векторными величинами (векторами).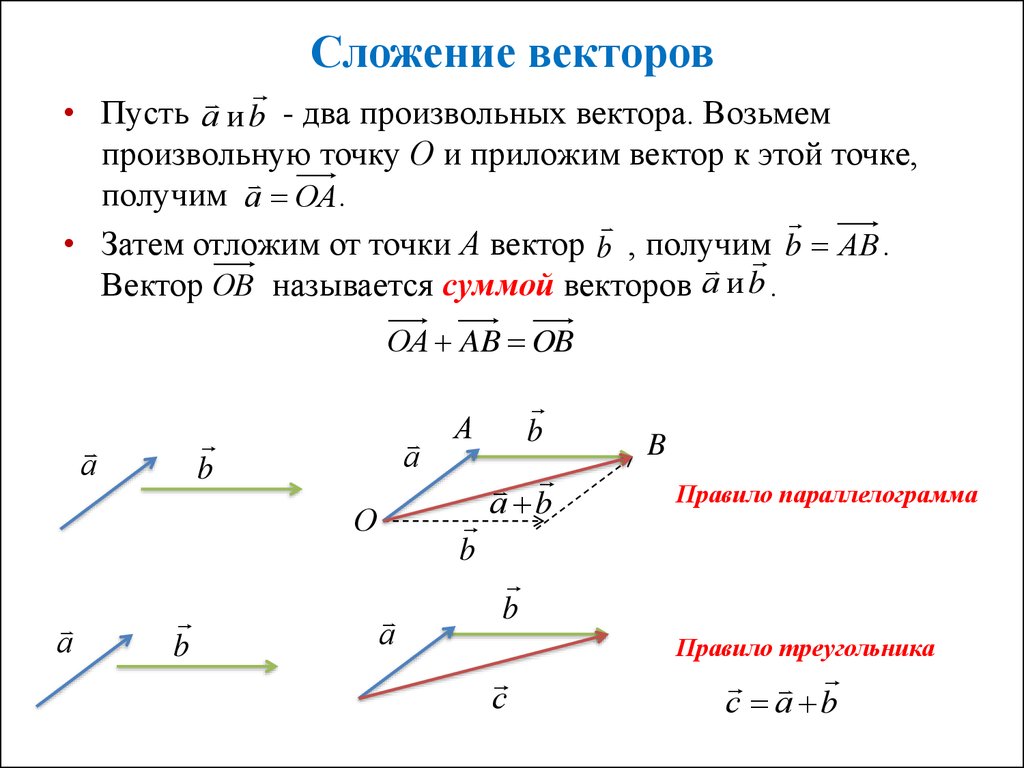 Векторы, в отличие от скаляров, обозначаются буквами жирного шрифта: a, b, g, F, С ….
Векторы, в отличие от скаляров, обозначаются буквами жирного шрифта: a, b, g, F, С ….
Нередко вектор обозначают буквой обычного (нежирного) шрифта, но со стрелкой над ней:
Кроме того, часто вектор обозначают парой букв (обычно заглавных), причём первая буква обозначает начало вектора, а вторая — его конец.
Модуль вектора, то есть длину направленного прямолинейного отрезка, обозначают теми же буквами, как и сам вектор, но в обычном (не жирном) написании и без стрелки над ними, либо точно также как и вектор (то есть жирным шрифтом или обычным, но со стрелкой), но тогда обозначение вектора заключается в вертикальные черточки.
Вектор – сложный объект, который одновременно характеризуется и величиной и направлением.
Не бывает также положительных и отрицательных векторов. А вот равными между собой векторы быть могут. Это когда, например, aиb имеют одинаковые модули и направлены в одну сторону. В этом случае справедлива запись a = b. Надо также иметь в виду, что перед символом вектора может стоять знак минус, например, — с, однако, этот знак символически указывает на то, что вектор -с имеет такой же модуль, как и вектор с, но направлен в противоположную сторону.
Надо также иметь в виду, что перед символом вектора может стоять знак минус, например, — с, однако, этот знак символически указывает на то, что вектор -с имеет такой же модуль, как и вектор с, но направлен в противоположную сторону.
Вектор -с называют противоположным (или обратным) вектору с.
В физике же каждый вектор наполнен конкретным содержанием и при сравнении однотипных векторов (например, сил) могут иметь существенное значение и точки их приложения.
2.Определение проекции, оси и координатой точки.
Ось – это прямая, которой придается какое–то направление.
Ось обозначается какой-либо буквой: X , Y , Z , s , t … Обычно на оси выбирается (произвольно) точка, которая называется началом отсчета и, как правило, обозначается буквой О. От этой точки отсчитываются расстояния до других интересующих нас точек.
Проекцией точки на ось называется основание перпендикуляра, опущенного из этой точки на данную ось. То есть, проекцией точки на ось является точка.
Координатой точки на данной оси называется число, абсолютная величина которого равна длине отрезка оси (в выбранном масштабе), заключённого между началом оси и проекцией точки на эту ось. Это число берется со знаком плюс, если проекция точки располагается в направлении оси от ее начала и со знаком минус, если в противоположном направлении.
3.Проекция вектора на ось.
Проекцией вектора на ось называется вектор, который получается в результате перемножения скалярной проекции вектора на эту ось и единичного вектора этой оси. Например, если а x – скалярная проекция вектора а на ось X, то а x ·i — его векторная проекция на эту ось.
Обозначим векторную проекцию также, как и сам вектор, но с индексом той оси на которую вектор проектируется. Так, векторную проекцию вектора а на ось Х обозначим а x (жирная буква, обозначающая вектор и нижний индекс названия оси) или
(нежирная буква, обозначающая вектор, но со стрелкой наверху (!) и нижний индекс названия оси).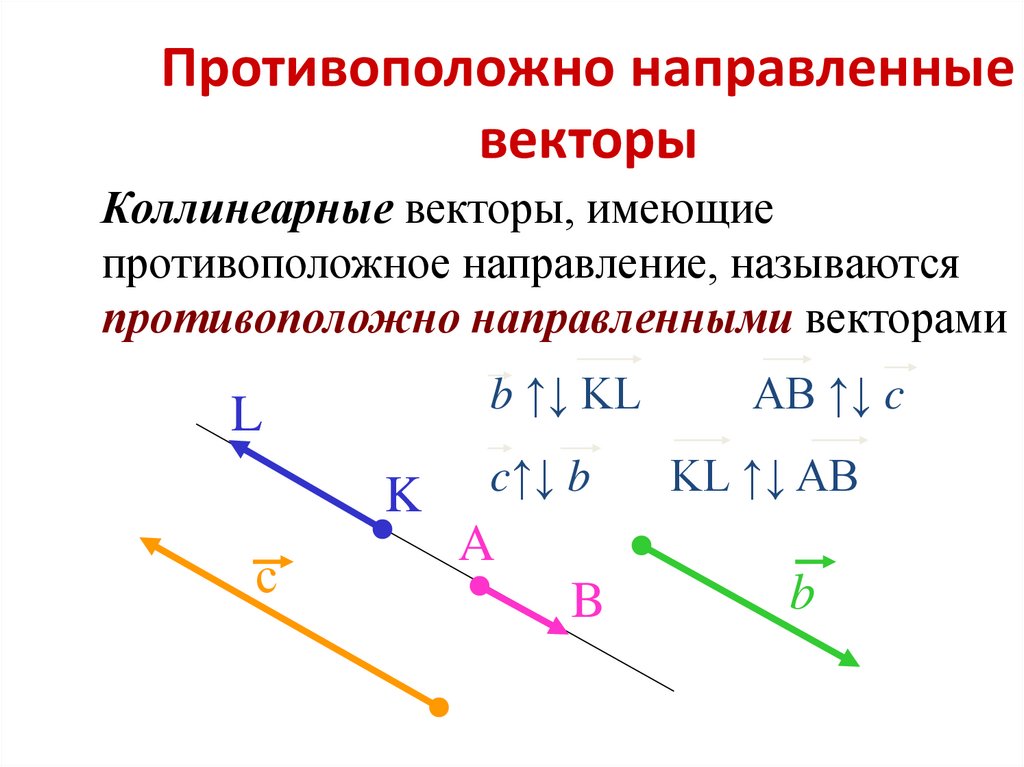
Скалярной проекцией вектора на ось называется число , абсолютная величина которого равна длине отрезка оси (в выбранном масштабе), заключённого между проекциями точки начала и точки конца вектора. Обычно вместо выражения скалярная проекция говорят просто – проекция . Проекция обозначается той же буквой, что и проектируемый вектор (в обычном, нежирном написании), с нижним (как правило) индексом названия оси, на которую этот вектор проектируется. Например, если на ось Х проектируется вектора, то его проекция обозначается а x . При проектировании этого же вектора на другую ось, если ось Y , его проекция будет обозначаться а y .
Чтобы вычислить проекцию вектора на ось (например, ось X) надо из координаты точки его конца вычесть координату точки начала, то есть
а x = х к − x н.
Проекция вектора на ось — это число. Причем, проекция может быть положительной, если величина х к больше величины х н,
отрицательной, если величина х к меньше величины х н
и равной нулю, если х к
равно х н.
Проекцию вектора на ось можно также найти, зная модуль вектора и угол, который он составляет с этой осью.
Из рисунка видно, что а x = а Cos α
То есть, проекция вектора на ось равна произведению модуля вектора на косинус угла между направлением оси и направлением вектора . Если угол острый, то
Cos α > 0 и а x
> 0, а, если тупой, то косинус тупого угла отрицателен, и проекция вектора на ось тоже будет отрицательна.
Углы, отсчитываемые от оси против хода часовой стрелки, принято считать положительными, а по ходу — отрицательными. Однако, поскольку косинус – функция четная, то есть, Cos α = Cos (− α), то при вычислении проекций углы можно отсчитывать как по ходу часовой стрелки, так и против.
Чтобы найти проекцию вектора на ось надо модуль этого вектора умножить на косинус угла между направлением оси и направлением вектора.
4. Основная формула векторной алгебры.
Спроектируемвектор а на оси Х и Y прямоугольной системы координат. Найдем векторные проекции вектора а на эти оси:
Найдем векторные проекции вектора а на эти оси:
а x = а x ·i, а y = а y ·j.
Но в соответствии справилом сложения векторов
а = а x + а y .
а = а x ·i + а y ·j.
Таким образом, мы выразили вектор через его проекции и орты прямоугольной системы координат (или через его векторные проекции).
Векторные проекции а x и а y называютсясоставляющими или компонентами вектора а. Операция, которую мы выполнили, называется разложением вектора по осямпрямоугольной системы координат.
Если вектор задан в пространстве, то
а = а x ·i + а y ·j + а z ·k.
Эта формула называется основной формулой векторной алгебры. Конечно, ее можно записать и так.
Сложение и вычитание векторов 8 класс онлайн-подготовка на Ростелеком Лицей
Тема: Векторы
Урок: Сложение и вычитание векторов
1. Сумма двух векторов, правило треугольника
На предыдущем уроке мы определили понятие вектора, сказали, какие векторы называются равными, коллинеарными, сонаправленными и противонаправленными.
Теперь пусть задано два вектора – вектора и . Найдем сумму этих двух векторов . Для этого отложим из некоторой точки А вектор . Из точки В отложим вектор . Тогда вектор называют суммой заданных векторов: (см. Рис. 1).
Рис. 1
Данное определение можно объяснить так: пусть был задан груз, и сначала на него подействовала сила – он переместился из точки А в точку В, после этого подействовала сила – груз переместился из точки В в точку С. Но в результате действия двух этих сил груз переместился из точки А в точку С.
Таким образом, мы получили определение суммы двух векторов – правило треугольника.
Правило треугольника
Для того чтобы получить сумму двух векторов, нужно из произвольной точки отложить первый вектор, из конца полученного вектора отложить второй вектор, и построить вектор, соединяющий начало первого с концом второго – это и будет сумма двух векторов.
Можно провести аналогию с числами. Мы ввели понятие числа, научились складывать числа, определили законы сложения и так далее. Теперь мы ввели понятие вектора, научились находить равные вектора, складывать вектора. Теперь нужно определить законы сложения.
Теперь мы ввели понятие вектора, научились находить равные вектора, складывать вектора. Теперь нужно определить законы сложения.
2. Законы сложения векторов, правило параллелограмма
Законы сложения векторов
Для любых векторов , и справедливы следующие равенства:
– переместительный закон.
Доказательство: отложим из точки сначала вектор , получаем точку В, из нее откладываем вектор , получаем точку С и вектор .
Теперь отложим из точки А сначала вектор получим точку В, из нее отложим вектор, получим точку С и вектор .
Чтобы доказать равенство полученных векторов, выполним оба построения из одной точки и получим таким образом правило параллелограмма (см. Рис. 2).
Рис. 2
Откладываем из точки А вектор и вектор . Из точки В откладываем вектор , вектора и равны, а значит, стороны ВС и АВ1 четырехугольника АВСВ1 параллельны. Аналогично параллельны и стороны АВ и В1С, таким образом, мы получили параллелограмм. АС – диагональ параллелограмма. , таким образом, мы доказали переместительный
АС – диагональ параллелограмма. , таким образом, мы доказали переместительный
Рис. 3
закон сложения векторов и получили правило параллелограмма (см. Рис. 3).
Правило параллелограмма
Чтобы получить сумму двух векторов, нужно из произвольной точки отложить эти два вектора и построить на них параллелограмм. Диагональ параллелограмма, исходящая из начальной точки, и будет суммой заданных векторов.
– сочетательный закон;
Из произвольной точки А отложим вектор , прибавим к нему вектор , получим их сумму . К этой сумме прибавим вектор , получим результат (см. Рис. 4).
Рис. 4
В правой части выражения мы сначала получили сумму векторов , после прибавили ее к вектору и получили результат: (см. Рис. 5).
Таким образом, мы доказали сочетательный закон сложения векторов.
Рис. 5
3. Правило сложения нескольких векторов
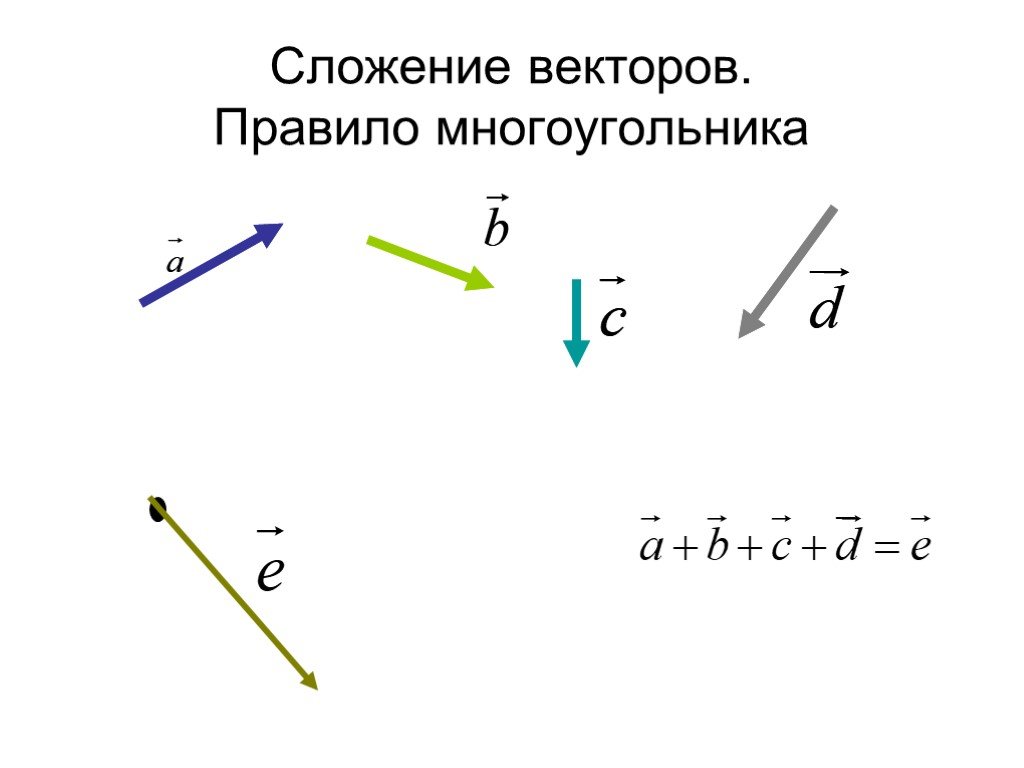
Правило многоугольника
Чтобы сложить несколько векторов, нужно из произвольной точки отложить первый вектор, из его конца отложить второй вектор, из конца второго вектора отложить третий и так далее; когда все векторы отложены, соединив начальную точку с концом последнего вектора, получим сумму нескольких векторов (см. Рис. 6).
Рис. 6).
Рис. 6
По аналогии с действительными числами после того, как мы научились их складывать, нужна обратная операция – вычитание.
4. Правило вычитания векторов
Пусть задано два вектора – векторы и . Найдем разность этих двух векторов .
Определение
Разностью двух векторов и называют такой третий вектор, сумма которого с вектором равна вектору .
Если задан вектор , то можно построить противоположный ему вектор , который будет равен по длине, но противонаправлен. Сумма противоположных векторов всегда есть нулевой вектор: . Таким образом, .
Отложим из произвольной точки вектор , из его конца отложим вектор , получим в результате вектор (см. Рис. 7).
Рис. 7
Рассмотрим вычитание векторов на параллелограмме. Из точки А отложим векторы и . Из точек В и D отложим векторв и соответственно. Диагональ АС – это сумма векторов и : . Но в параллелограмме есть еще вторая диагональ – BD.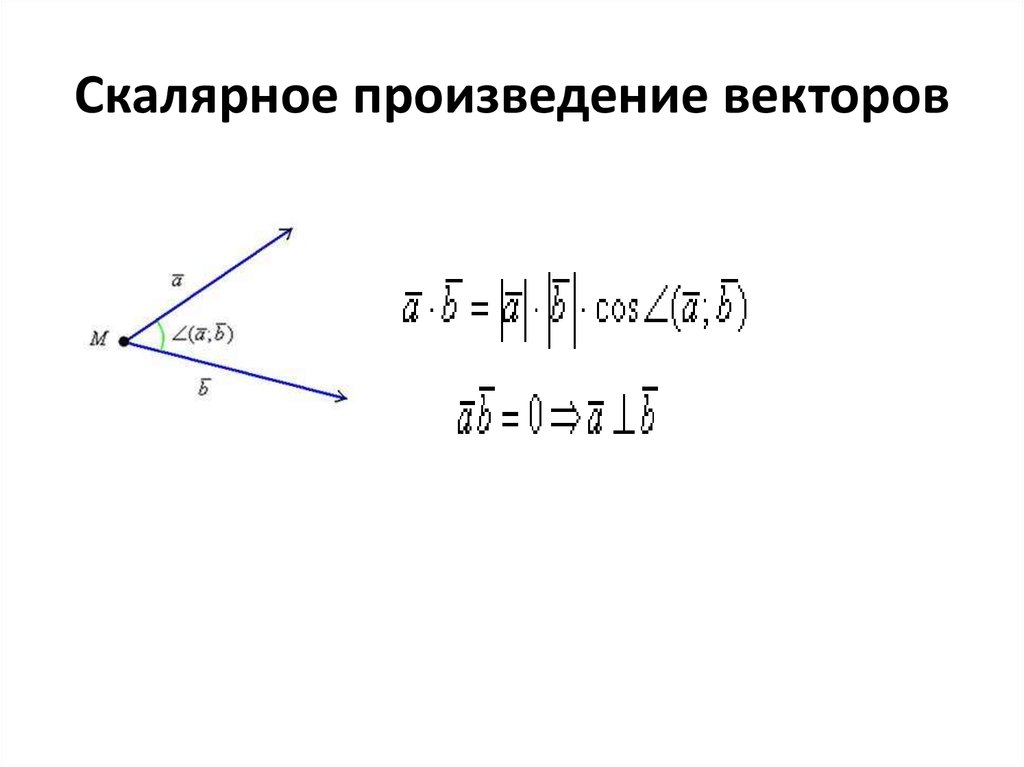 Прибавим к вектору вектор , получим вектор (см. Рис. 8).
Прибавим к вектору вектор , получим вектор (см. Рис. 8).
Рис. 8
Итак, на данном уроке мы вывели правила сложения и вычитания векторов при помощи треугольника и параллелограмма, сформулировали законы сложения векторов.
Список литературы
- Александров А.Д. и др. Геометрия, 8 класс. – М.: Просвещение, 2006.
- Бутузов В.Ф., Кадомцев С.Б., Прасолов В.В. Геометрия, 8 класс. – М.: Просвещение, 2011.
- Мерзляк А.Г., Полонский В.Б., Якир С.М. Геометрия, 8 класс. – М.: ВЕНТАНА-ГРАФ, 2009.
Дополнительные рекомендованные ссылки на ресурсы сети Интернет
- Emomi.com (Источник).
- Prosto-o-slognom.ru (Источник).
- Изучение математики онлайн (Источник).
Домашнее задание
- Задание 1: дан треугольник , найдите сумму векторов: и ; и ; и ; и .
- Задание 2: турист прошел 20 км на восток из города А в город В, а потом 30 км на восток в город С. Выбрав подходящий масштаб, начертите векторы и Равны ли векторы и ?
- Задание 3: начертите попарно неколлинеарные векторы , и и постройте векторы , , .
 Выбрав подходящий масштаб, начертите векторы и Равны ли векторы и ?
Выбрав подходящий масштаб, начертите векторы и Равны ли векторы и ?
VectorBuilder | Революционная доставка генов.
Обзор Введение плазмидных векторов в клетки млекопитающих путем обычной трансфекции является одной из наиболее широко используемых процедур в биомедицинских исследованиях. Хотя за прошедшие годы был разработан ряд более сложных векторных систем доставки генов, таких как лентивирусные векторы, аденовирусные векторы, векторы AAV и piggyBac, обычная плазмидная трансфекция остается рабочей лошадкой доставки генов во многих лабораториях. Во многом это связано с его технической простотой, а также с хорошей эффективностью в широком диапазоне типов клеток. Ключевой особенностью трансфекции обычными плазмидными векторами является то, что она носит временный характер, и только очень небольшая часть клеток стабильно интегрирует плазмиду в геном (обычно менее 1%).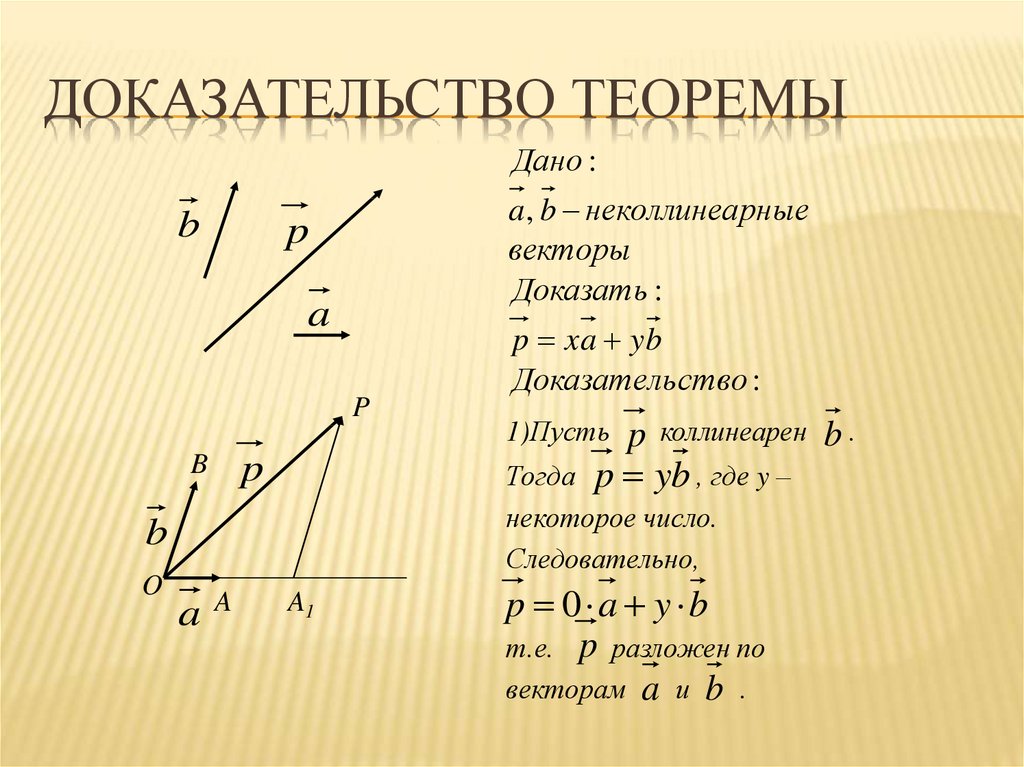
Для получения дополнительной информации об этой векторной системе см. приведенные ниже документы.
| Каталожные номера | Тема |
|---|---|
| Мол Биотехнолог. 16:151 (2000) | Обзор конструкции вектора для экспрессии генов млекопитающих |
| EMBO J. 12:2539 (1993) | Блокатор транскрипции предотвращает интерференцию транскрипции |
Основные моменты
Наш вектор оптимизирован для репликации с большим количеством копий в E. coli и высокоэффективной трансфекции. Клетки, трансфицированные вектором, могут быть отобраны и/или визуализированы на основании экспрессии маркерного гена, выбранного пользователем.
Преимущества
Техническая простота: Доставка плазмидных векторов в клетки путем обычной трансфекции технически проста и намного проще, чем векторы на основе вирусов, которые требуют упаковки живого вируса.
Очень большой грузовой отсек: Наш вектор может вместить примерно 30 килобайт общей ДНК. Основа плазмиды занимает всего около 3 кб, оставляя достаточно места для размещения интересующей пользователя последовательности.
Высокий уровень экспрессии: Обычная трансфекция плазмид часто может привести к очень большому количеству копий в клетках (до нескольких тысяч копий на клетку). Это может привести к очень высоким уровням экспрессии генов, переносимых вектором.
Недостатки
Отсутствие интеграции векторной ДНК: Обычная трансфекция плазмидными векторами также называется транзиторной трансфекцией, поскольку вектор остается в основном в виде эписомальной ДНК в клетках без интеграции. Однако плазмидная ДНК может постоянно интегрироваться в геном хозяина с очень низкой частотой (от одной на 10 2 до 10 6 клеток в зависимости от типа клеток). Если маркер устойчивости к лекарственному средству или флуоресцентный маркер включен в плазмиду, клетки, стабильно интегрирующие плазмиду, могут быть получены путем отбора лекарственного средства или сортировки клеток после расширенного культивирования.
Если маркер устойчивости к лекарственному средству или флуоресцентный маркер включен в плазмиду, клетки, стабильно интегрирующие плазмиду, могут быть получены путем отбора лекарственного средства или сортировки клеток после расширенного культивирования.
Ограниченный диапазон типов клеток: Эффективность плазмидной трансфекции может сильно различаться в зависимости от типа клеток. Неделящиеся клетки часто труднее трансфицировать, чем делящиеся, а первичные клетки часто труднее трансфицировать, чем иммортализованные клеточные линии. Известно, что некоторые важные типы клеток, такие как нейроны и β-клетки поджелудочной железы, трудно трансфицировать. Кроме того, плазмидная трансфекция в значительной степени ограничивается применениями in vitro и редко используется in vivo.
Неравномерность доставки гена: Хотя успешная трансфекция может привести к очень высокому среднему количеству копий трансфицированного плазмидного вектора на клетку, это может быть очень неоднородным.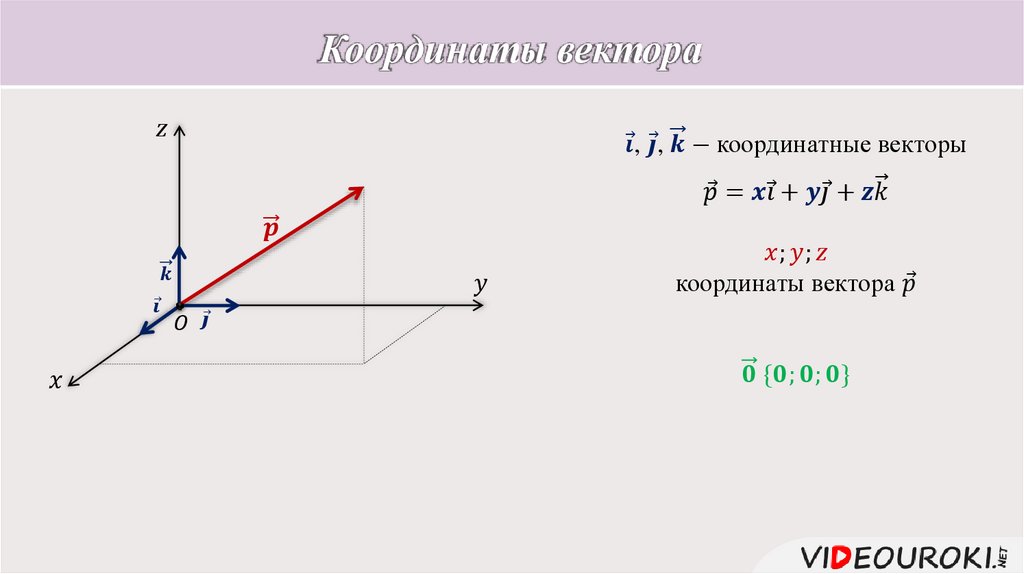 Некоторые клетки могут нести много копий, в то время как другие несут очень мало копий или не несут ни одной. Это не похоже на трансдукцию векторами на основе вируса, которая приводит к относительно однородной доставке генов в клетки.
Некоторые клетки могут нести много копий, в то время как другие несут очень мало копий или не несут ни одной. Это не похоже на трансдукцию векторами на основе вируса, которая приводит к относительно однородной доставке генов в клетки.
Промоутер: Здесь находится промотор, управляющий интересующим вас геном.
Козак: Консенсусная последовательность Козака. Он помещается перед стартовым кодоном интересующей ORF, поскольку считается, что он способствует инициации трансляции у эукариот.
ORF: Здесь находится открытая рамка считывания интересующего вас гена.
SV40 поздний pA: Обезьяний вирус 40 сигнал позднего полиаденилирования. Это облегчает терминацию транскрипции вышестоящей ORF.
Промотор CMV: Пряморанний промотор цитомегаловируса человека. Он управляет повсеместной экспрессией нижестоящего маркерного гена.
Он управляет повсеместной экспрессией нижестоящего маркерного гена.
Маркер: Ген отбора лекарств (например, устойчивости к неомицину), визуально определяемый ген (например, EGFP) или ген с двойным репортером (например, EGFP/Neo). Это позволяет выбирать и/или визуализировать клетки, трансдуцированные вектором.
BGH pA: Полиаденилирование бычьего гормона роста. Это облегчает терминацию транскрипции вышестоящей ORF.
pUC ori: pUC начало репликации. Плазмиды, несущие это происхождение, существуют в большом количестве копий в E. coli.
Ампициллин: Ген устойчивости к ампициллину. Это позволяет поддерживать плазмиду путем отбора ампициллина в E. coli.
Дизайн моего вектора Отправить запрос на дизайн
VectorBuilder | Революционная доставка генов.
 Обзор
Обзор Лентивирусная векторная система является высокоэффективным средством для постоянного введения генов в клетки млекопитающих. В настоящее время это один из двух наиболее часто используемых методов доставки генов в клетки млекопитающих (вторым является обычная плазмидная трансфекция). Особенности, которые делают эту систему такой популярной, включают возможность выбирать, какой промотор будет управлять интересующим геном, и способность инфицировать очень широкий спектр типов клеток.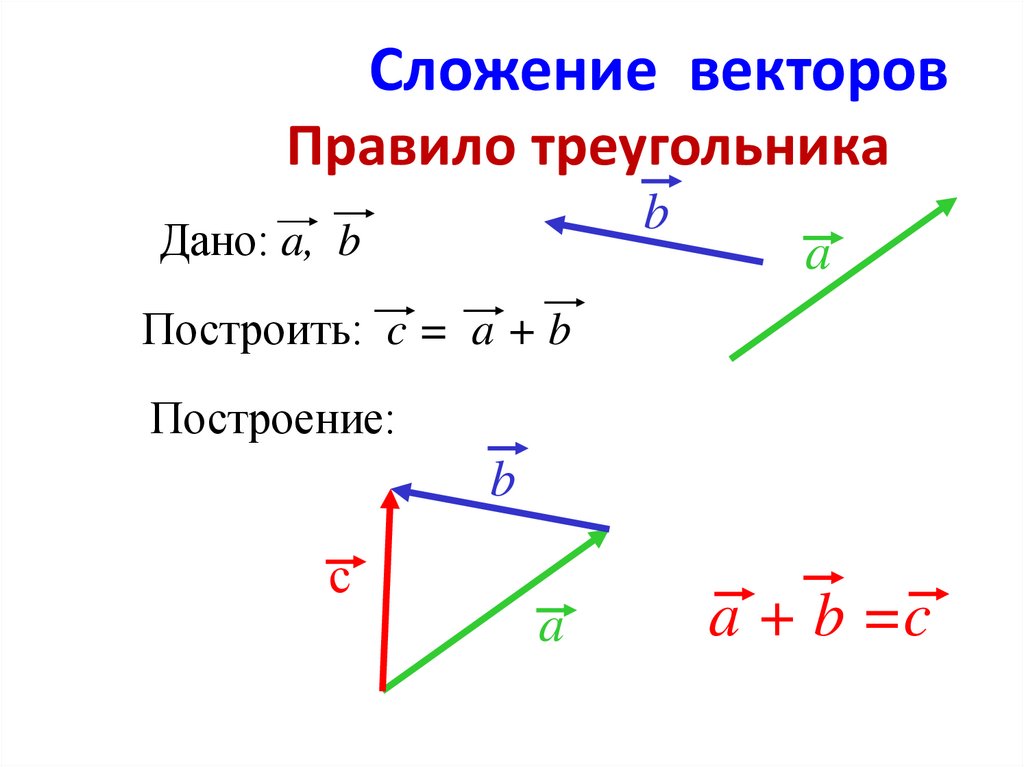
Лентивирусные векторы происходят от ВИЧ, который является членом семейства ретровирусов. Лентивирус дикого типа имеет геном с линейной РНК плюс-цепи.
Лентивирусный вектор сначала конструируют в виде плазмиды в E. coli. Затем его трансфицировали в упаковочные клетки вместе с несколькими вспомогательными плазмидами. Внутри упаковочных клеток векторная ДНК, расположенная между двумя длинными концевыми повторами (LTR), транскрибируется в РНК, а вирусные белки, экспрессируемые хелперными плазмидами, дополнительно упаковывают РНК в вирус. Затем живой вирус высвобождается в супернатант, который можно использовать для заражения клеток-мишеней непосредственно или после концентрирования.
Когда вирус добавляется к клеткам-мишеням, груз РНК перемещается в клетки, где он обратно транскрибируется в ДНК и случайным образом интегрируется в геном хозяина. Любой ген (гены), который был помещен между двумя LTR во время клонирования вектора, постоянно встраивается в ДНК хозяина вместе с остальной частью вирусного генома.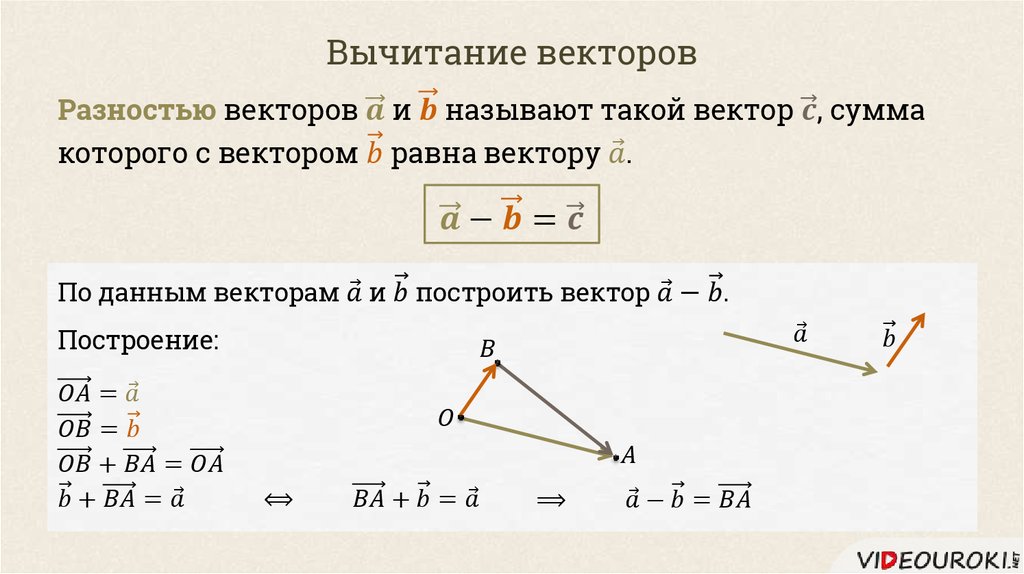
В лентивирусных векторах отсутствуют гены, необходимые для упаковки и трансдукции вируса (вместо этого эти гены переносятся вспомогательными плазмидами, используемыми при упаковке вируса). В результате вирус, полученный из лентивирусных векторов, обладает важной характеристикой безопасности, заключающейся в том, что он неспособен к репликации (это означает, что он может трансдуцировать клетки-мишени, но не может реплицироваться в них).
Нажмите, чтобы просмотреть отзывы пользователей о наших лентивирусных векторах
Для получения дополнительной информации об этой векторной системе см. документы ниже.
| Каталожные номера | Тема |
|---|---|
| J Вирол. 72:8463 (1998) | Лентивирусные векторы 3-го поколения |
| J Вирол. 72:9873 (1998) | Самоинактивирующиеся лентивирусные векторы |
| Наука. 272:263 (1996) | Трансдукция неделящихся клеток лентивирусными векторами |
Curr Gene Ther.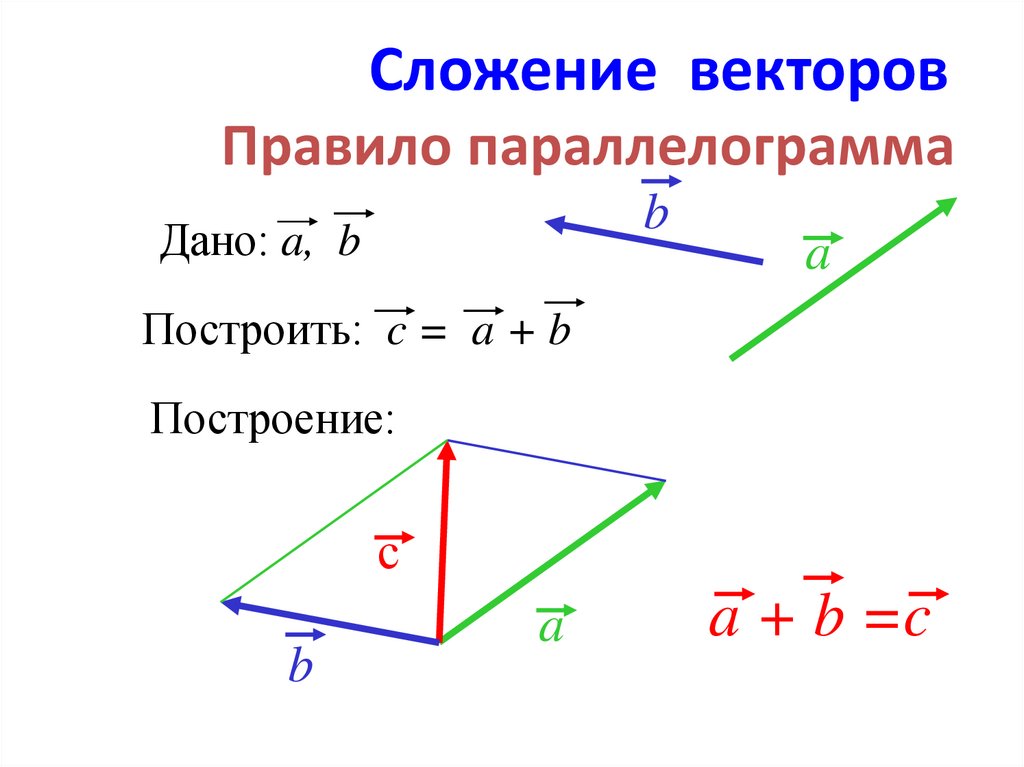 5:387 (2005) 5:387 (2005) | Тропизм лентивирусных векторов |
| J Вирол. 77:4685 (2003) | Влияние cPPT на трансдукцию лентивирусного вектора |
| J Вирол. 73:2886 (1999) | WPRE усиливает экспрессию трансгенов |
| Национальный протокол. 1:241 (2006) | Производство и очистка лентивирусных векторов |
Особенности
Наш вектор получен из лентивирусной векторной системы третьего поколения. Он оптимизирован для репликации с большим числом копий в E. coli, упаковки живого вируса с высоким титром, эффективной вирусной трансдукции широкого спектра клеток, эффективной интеграции вектора в геном хозяина и экспрессии трансгена высокого уровня.
Преимущества
Постоянная интеграция векторной ДНК: Обычная трансфекция приводит к почти полностью временной доставке ДНК в клетки-хозяева из-за потери ДНК с течением времени. Эта проблема особенно актуальна для быстро делящихся клеток. Напротив, лентивирусная трансдукция может постоянно доставлять гены в клетки-хозяева благодаря интеграции вирусного вектора в геном хозяина.
Эта проблема особенно актуальна для быстро делящихся клеток. Напротив, лентивирусная трансдукция может постоянно доставлять гены в клетки-хозяева благодаря интеграции вирусного вектора в геном хозяина.
Высокий титр вируса: Наш лентивирусный вектор может быть упакован в вирус с высоким титром. При получении лентивируса с помощью нашей службы упаковки вирусов титр может достигать >10 8 единиц преобразования на мл (ТЕ/мл). При этом титре эффективность трансдукции культивируемых клеток млекопитающих может приближаться к 100% при использовании достаточного количества вируса.
Очень широкий тропизм: Наша система упаковки добавляет белок оболочки VSV-G на поверхность вируса. Этот белок имеет широкий тропизм. В результате можно трансдуцировать клетки всех широко используемых видов млекопитающих (и даже некоторых видов, не относящихся к млекопитающим). Кроме того, можно трансдуцировать почти любой тип клеток млекопитающих (например, делящиеся клетки и неделящиеся клетки, первичные клетки и устоявшиеся клеточные линии, стволовые клетки и дифференцированные клетки, адгезивные клетки и неприкрепленные клетки).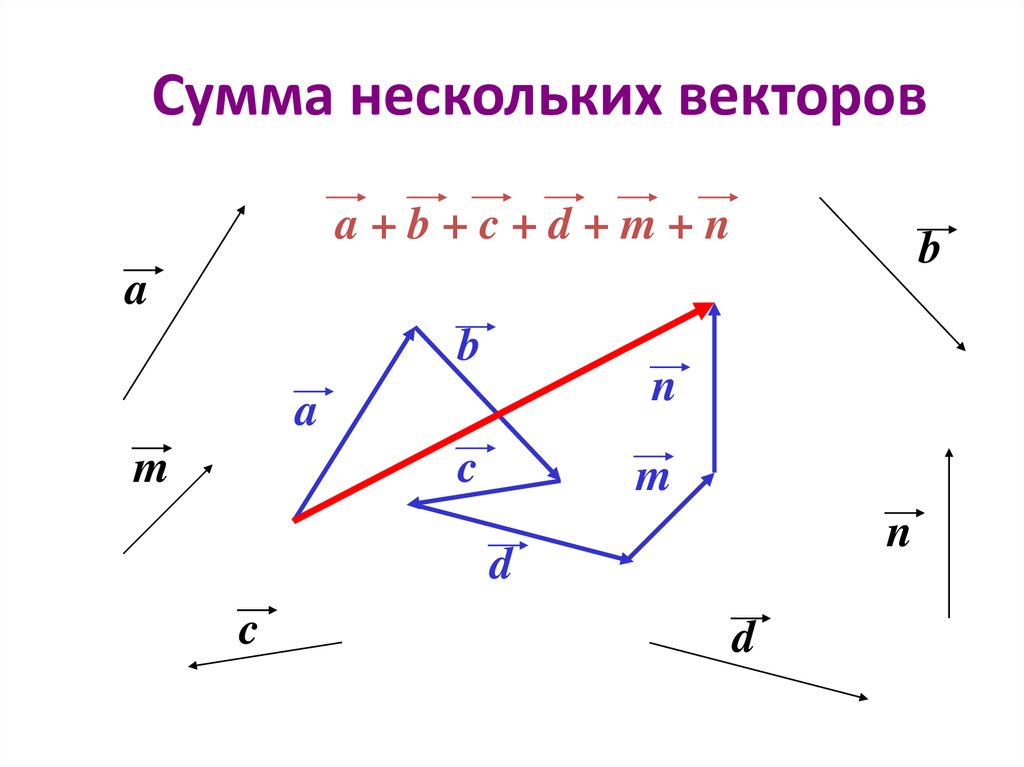 Нейроны, которые часто невосприимчивы к обычной трансфекции, могут быть легко трансдуцированы нашим лентивирусным вектором. Лентивирусные векторы, упакованные с нашей системой, имеют более широкий тропизм, чем аденовирусные векторы (которые имеют низкую эффективность трансдукции для некоторых типов клеток) или ретровирусные векторы MMLV (которые с трудом трансдуцируют неделящиеся клетки).
Нейроны, которые часто невосприимчивы к обычной трансфекции, могут быть легко трансдуцированы нашим лентивирусным вектором. Лентивирусные векторы, упакованные с нашей системой, имеют более широкий тропизм, чем аденовирусные векторы (которые имеют низкую эффективность трансдукции для некоторых типов клеток) или ретровирусные векторы MMLV (которые с трудом трансдуцируют неделящиеся клетки).
Настраиваемый внутренний промотор: Наш вектор предназначен для самоинактивации активности промотора в его 5′ LTR при интеграции в геном. В результате пользователи могут вставлять свой собственный промотор, чтобы управлять интересующим их геном в векторе. Это явное преимущество по сравнению с нашими ретровирусными векторами MMLV, которые полагаются на промоторную функцию 5′ LTR для обеспечения повсеместной экспрессии интересующего гена.
Относительная однородность доставки генов: Как правило, вирусная трансдукция может доставлять векторы в клетки относительно однородным образом. Напротив, обычная трансфекция плазмидными векторами может быть очень неоднородной: некоторые клетки получают много копий, а другие клетки получают мало копий или не получают ни одной.
Напротив, обычная трансфекция плазмидными векторами может быть очень неоднородной: некоторые клетки получают много копий, а другие клетки получают мало копий или не получают ни одной.
Эффективность in vitro и in vivo: Хотя наш вектор в основном используется для трансдукции культивируемых клеток in vitro, его также можно использовать для трансдукции клеток живых животных.
Безопасность: Безопасность нашего вектора обеспечивается двумя особенностями. Один из них — разделение генов, необходимых для вирусной упаковки и трансдукции, на несколько вспомогательных плазмид; другой — самоинактивация активности промотора в 5′ LTR при интеграции вектора. В результате практически невозможно появление способного к репликации вируса во время упаковки и трансдукции. Поэтому риск для здоровья при работе с нашим переносчиком минимален.
Недостатки
Ограниченное грузовое пространство: Геном лентивируса дикого типа составляет ~9,2 кб.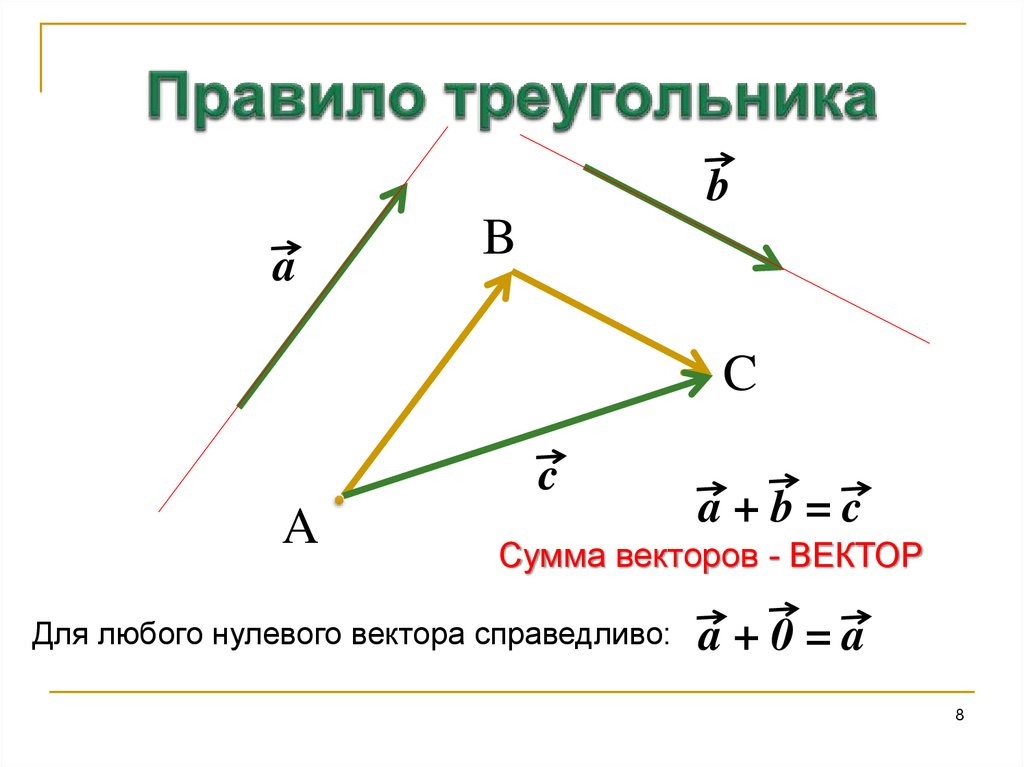 В нашем векторе компоненты, необходимые для вирусной упаковки и трансдукции, занимают ~2,8 т.п.н., что оставляет ~6,4 т.п.н. для размещения интересующей ДНК пользователя. Когда вектор выходит за пределы этого ограничения по размеру, титр вируса может сильно снижаться. Наш вектор обычно используется для вставки нескольких функциональных элементов помимо ORF интересующего гена, таких как промотор и лекарственная устойчивость. Большая ORF плюс эти дополнительные элементы могут превышать 6,4 т.п.н., что может привести к нарушению продукции вируса.
В нашем векторе компоненты, необходимые для вирусной упаковки и трансдукции, занимают ~2,8 т.п.н., что оставляет ~6,4 т.п.н. для размещения интересующей ДНК пользователя. Когда вектор выходит за пределы этого ограничения по размеру, титр вируса может сильно снижаться. Наш вектор обычно используется для вставки нескольких функциональных элементов помимо ORF интересующего гена, таких как промотор и лекарственная устойчивость. Большая ORF плюс эти дополнительные элементы могут превышать 6,4 т.п.н., что может привести к нарушению продукции вируса.
Техническая сложность: Использование лентивирусных векторов требует получения живого вируса в пакующих клетках с последующим измерением титра вируса. Эти процедуры технически сложны и требуют много времени по сравнению с обычной плазмидной трансфекцией.
Ключевые компоненты Промотор RSV: Промотор вируса саркомы Рауса. Он управляет транскрипцией вирусной РНК в упаковочных клетках. Эта РНК затем упаковывается в живой вирус.
Он управляет транскрипцией вирусной РНК в упаковочных клетках. Эта РНК затем упаковывается в живой вирус.
5′ LTR-ΔU3: Делетированная версия 5′-концевого повтора ВИЧ-1. У лентивируса дикого типа 5′-LTR и 3′-LTR практически идентичны по последовательности. Они находятся на двух концах вирусного генома и направлены в одном направлении. После интеграции вируса последовательность 3′ LTR копируется в 5′ LTR. LTR несут как промотор, так и функцию полиаденилирования, так что в вирусе дикого типа 5′-LTR действует как промотор, управляя транскрипцией вирусного генома, а 3′-LTR действует как сигнал полиаденилирования, чтобы терминировать восходящий транскрипт. В нашем векторе 5′ LTR-ΔU3 делетирован для области, которая необходима для активности промотора LTR, обычно поддерживаемой вирусным фактором транскрипции Tat. Это не влияет на продукцию вирусной РНК во время упаковки, поскольку функция промотора дополняется промотором RSV, сконструированным перед Δ5′ LTR.
Ψ: Сигнал упаковки ВИЧ-1, необходимый для упаковки вирусной РНК в вирус.
RRE: Элемент ответа на ВИЧ-1 Rev. Это позволяет ядерному экспорту вирусной РНК вирусным белком Rev во время упаковки вируса.
cPPT: ВИЧ-1 Центральный полипуриновый тракт. Он создает «лоскут ДНК», который увеличивает ядерный импорт вирусного генома во время заражения клетки-мишени. Это улучшает интеграцию вектора в геном хозяина, что приводит к более высокой эффективности трансдукции.
Промоутер: Здесь находится промоутер, управляющий интересующим вас геном.
Козак: Консенсусная последовательность Козака. Он помещается перед стартовым кодоном интересующей ORF, поскольку считается, что он способствует инициации трансляции у эукариот.
ORF: Здесь находится открытая рамка считывания интересующего вас гена.
WPRE: Посттранскрипционный регуляторный элемент вируса гепатита сурков. Он повышает стабильность вирусной РНК в упаковочных клетках, что приводит к более высокому титру упакованного вируса.
Промотор mPGK: Промотор гена мышиной фосфоглицераткиназы 1. Он управляет повсеместной экспрессией нижестоящего маркерного гена.
Маркер: Ген отбора лекарств (например, устойчивости к неомицину), визуально определяемый ген (например, EGFP) или ген с двойным репортером (например, EGFP/Neo). Это позволяет выбирать и/или визуализировать клетки, трансдуцированные вектором.
3′ LTR-ΔU3: Укороченная версия 3′-концевого повтора ВИЧ-1, в котором удалена область U3. Это приводит к самоинактивации промоторной активности 5′-LTR при интеграции вирусного вектора в геном хозяина (из-за того, что 3′-LTR копируется на 5′-LTR во время вирусной интеграции). Сигнал полиаденилирования, содержащийся в 3′-LTR-ΔU3, служит для терминации всех восходящих транскриптов, продуцируемых как во время вирусной упаковки, так и после вирусной интеграции в геном хозяина.
SV40 ранний pA: Обезьяний вирус 40 сигнал раннего полиаденилирования.