
Высшая математика
1. Функции, область определения и изменения функций. Обратные функции. Пределы функций, односторонние пределы.
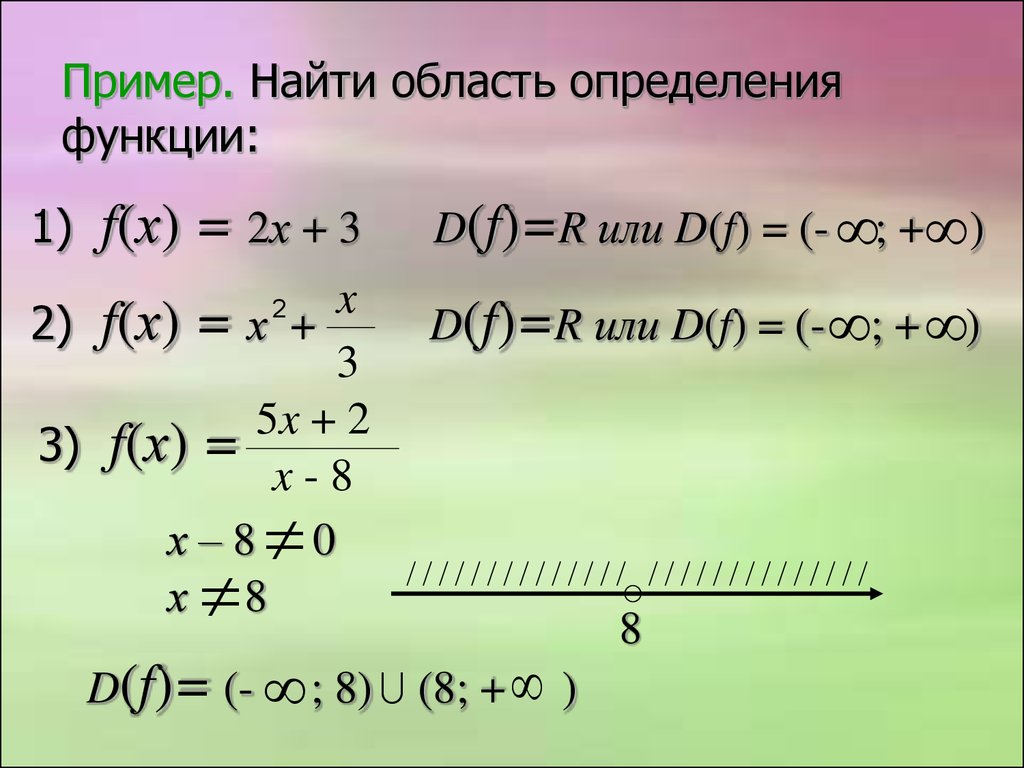
Ответ. Совокупность всех тех значений, которые принимает аргумент х функции y = f (x), называется областью определения этой функции. Совокупность всех тех значений, которые принимает сама функция у, называется областью изменения этой функции. Обратная функция — функция, обращающая зависимость, выражаемую данной функцией. Например, если функция от x даёт y, то обратная ей функция от y даёт x. Обратная функция функции f обычно обозначается f-1, иногда также используется обозначение f inv. Функция, имеющая обратную, называется обратимой. Функция g:Y→ X называется обратной к функции f:X→Y, если выполнены следующие тождества:
Чтобы
найти обратную функцию, нужно решить
уравнение y=f(x) относительно x. Если оно
имеет более чем один корень, то функции,
обратной к f не существует. Таким образом,
функция f(x) обратима на интервале (a;b)
тогда и только тогда, когда на этом
интервале она взаимно-однозначна. Для
непрерывной функции F(y) выразить y из
уравнения x-F(y)=0 возможно в том и только
том случае, когда функция F(y) строго
монотонна. Тем не менее, непрерывную
функцию всегда можно обратить на
промежутках её строгой монотонности.
Например, является обратной функцией к х
Таким образом,
функция f(x) обратима на интервале (a;b)
тогда и только тогда, когда на этом
интервале она взаимно-однозначна. Для
непрерывной функции F(y) выразить y из
уравнения x-F(y)=0 возможно в том и только
том случае, когда функция F(y) строго
монотонна. Тем не менее, непрерывную
функцию всегда можно обратить на
промежутках её строгой монотонности.
Например, является обратной функцией к х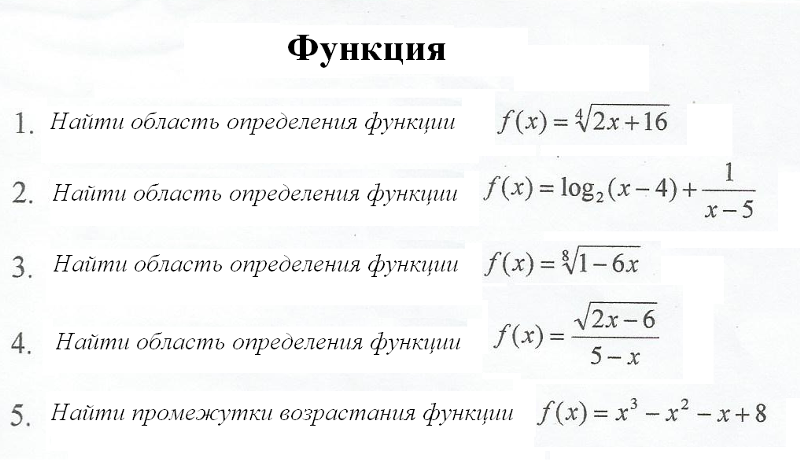
Краткий курс высшей математики
Краткий курс высшей математики
ОглавлениеПРЕДИСЛОВИЕГЛАВА I. МЕТОД КООРДИНАТ. ПОНЯТИЕ ФУНКЦИИ § 1. ДЕЙСТВИТЕЛЬНЫЕ ЧИСЛА. КООРДИНАТЫ ТОЧКИ НА ПРЯМОЙ 2. Геометрическое изображение действительных чисел. Координаты точки на прямой 3. Абсолютная величина действительного числа 4. Расстояние между двумя точками на прямой § 2. КООРДИНАТЫ НА ПЛОСКОСТИ И В ПРОСТРАНСТВЕ 2. Расстояние между двумя точками на плоскости 3. Деление отрезка в данном отношении 4. Координаты точки в пространстве 5. Расстояние между двумя точками в пространстве § 3.  УГОЛ МЕЖДУ ДВУМЯ ОСЯМИ. ПОЛЯРНЫЕ КООРДИНАТЫ УГОЛ МЕЖДУ ДВУМЯ ОСЯМИ. ПОЛЯРНЫЕ КООРДИНАТЫ2. Полярные координаты 3. Зависимость между декартовыми и полярными координатами § 4. ФУНКЦИОНАЛЬНАЯ ЗАВИСИМОСТЬ 2. Понятие функции 3. График функции 4. Способы задания функций 5. Основные элементарные функции и их графики 6. Сложные функции. Элементарные функции 7. Целые и дробно-рациональные функции 8. Функции четные и нечетные. Периодические функции § 5. УРАВНЕНИЕ ЛИНИИ 2. Нахождение уравнения линии по ее геометрическим свойствам § 6 ПРЕОБРАЗОВАНИЕ КООРДИНАТ 2. Поворот осей координат ГЛАВА II. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ НА ПЛОСКОСТИ § 1. ПРЯМАЯ 2. Уравнение прямой с угловым коэффициентом 3. Уравнение прямой, параллельной оси ординат 4. Общее уравнение прямой и его частные случаи 5. Точка пересечения прямых. Построение прямой по ее уравнению 6. Вычисление угла между двумя прямыми. Условия параллельности и перпендикулярности двух прямых 7. Уравнение прямой, проходящей через данную точку в заданном направлении 8. 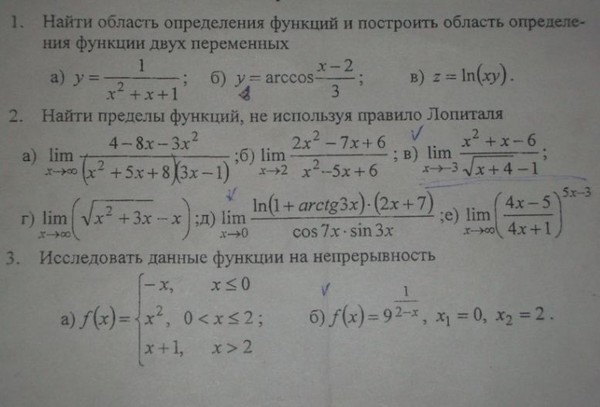 Пучок прямых Пучок прямых9. Уравнение прямой, проходящей через две данные точки § 2. КРИВЫЕ ВТОРОГО ПОРЯДКА 2. Окружность 3. Эллипс 4. Гипербола 5. Парабола 6. Окружность, эллипс, гипербола и парабола как конические сечения 7. Упрощение уравнения кривой второго порядка. График квадратного трехчлена 8. Уравнение равносторонней гиперболы, асимптоты которой приняты за оси координат 9. График дробно-линейной функции 10. Преобразование уравнения кривой второго порядка, не содержащего члена с произведением координат ГЛАВА III. ЭЛЕМЕНТЫ ЛИНЕЙНОЙ И ВЕКТОРНОЙ АЛГЕБРЫ § 1. ЭЛЕМЕНТЫ ТЕОРИИ ОПРЕДЕЛИТЕЛЕЙ 2. Определитель третьего порядка 3. Понятие об определителях высших порядков § 2. СИСТЕМЫ УРАВНЕНИЙ ПЕРВОЙ СТЕПЕНИ 2. Однородная система двух уравнений первой степени с тремя неизвестными 3. Система трех уравнений первой степени с тремя неизвестными 4. Однородная система трех уравнений первой степени с тремя неизвестными § 3. 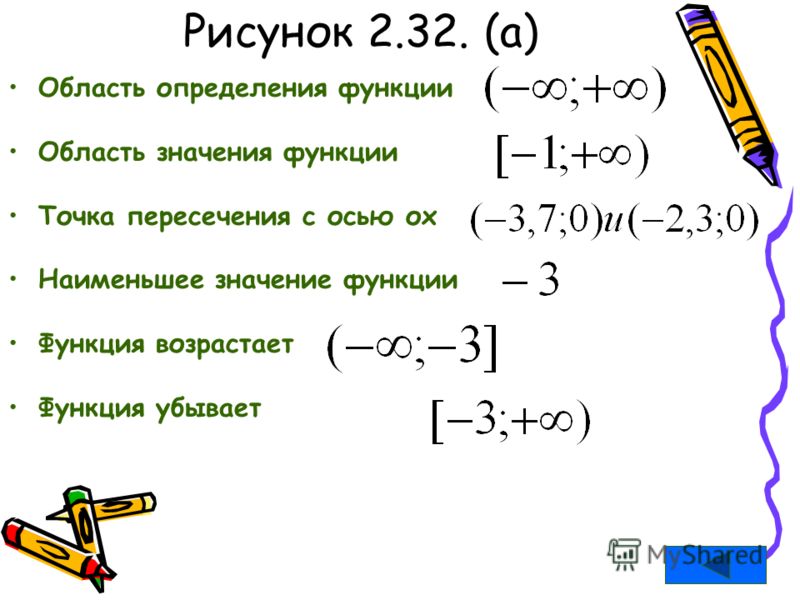 ЭЛЕМЕНТЫ ВЕКТОРНОЙ АЛГЕБРЫ ЭЛЕМЕНТЫ ВЕКТОРНОЙ АЛГЕБРЫ2. Линейные операции над векторами 4. Проекция вектора на ось и составляются вектора по оси 5. Разложение вектора на составляющие по осям координат 6. Направляющие косинусы вектора 7. Условие коллинеарности двух векторов 8. Скалярное произведение 9. Выражение скалярного произведения через проекции перемножаемых векторов 10. Косинус угла между двумя векторами 11. Векторное произведение 12. Выражение векторного произведения через проекции перемножаемых векторов 13. Смешанное произведение трех векторов 14. Геометрический смысл смешанного произведения 15. Условие компланарности трех векторов § 4. МАТРИЦЫ И ДЕЙСТВИЯ НАД НИМИ 2. Равенство матриц. Действия над матрицами 3. Обратная матрица 4. Матричная запись и матричное решение системы уравнений первой степени § 5. ЛИНЕЙНЫЕ ОТОБРАЖЕНИЯ 2. Преобразование координат 4. Упрощение общего уравнения кривой второго порядка ГЛАВА IV.  АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ§ 1. ПЛОСКОСТЬ 2. Нормальный вектор плоскости. Уравнение плоскости, проходящей через данную точку 3. Общее уравнение плоскости и его частные случаи 4. Построение плоскости по ее уравнению 5. Угол между плоскостями. Условия параллельности и перпендикулярности двух плоскостей 6. Точка пересечения трех плоскостей § 2. ПРЯМАЯ В ПРОСТРАНСТВЕ 2. Общие уравнения прямой 3. Векторное уравнение прямой. Параметрические уравнения прямой 4. Канонические уравнения прямой 5. Уравнения прямой, проходящей через две точки 6. Угол между двумя прямыми. Условия параллельности и перпендикулярности прямых § 3. Прямая и плоскость в пространстве 2. Точка пересечения прямой с плоскостью 3. Расстояние от точки до плоскости 4. Пучок плоскостей § 4. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА 2. Цилиндрические поверхности 3. Конические поверхности 4. Поверхность вращения 6. Гиперболоиды 7. Параболоиды ГЛАВА V.  ТЕОРИЯ ПРЕДЕЛОВ ТЕОРИЯ ПРЕДЕЛОВ§ 1. ПРЕДЕЛ ФУНКЦИИ 2. Предел функции при х -> -оо 3. Предел функции при х->х0 4. Бесконечно малые функции. Ограниченные функции 5. Бесконечно большие функции и их связь с бесконечно малыми функциями 6. Основные теоремы о пределах 7. Предел функции при x -> 0 8. Последовательность. Число e 9. Натуральные логарифмы 10. Сравнение бесконечно малых функций § 2. НЕПРЕРЫВНЫЕ ФУНКЦИИ 2. Операции над непрерывными функциями. Непрерывность элементарных функций 3. Свойства функций, непрерывных на сегменте 4. Понятие об обратной функции 5. Обратные тригонометрические функции 7. Понятие о гиперболических функциях ГЛАВА VI. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ ФУНКЦИЙ ОДНОЙ ПЕРЕМЕННОЙ 1. Приращение аргумента и приращение функции 2. Определение непрерывности функции с помощью понятии приращения аргумента и приращения функции 3. Задачи, приводящие к понятию производной 4.  Определение производной и ее механический смысл Определение производной и ее механический смысл5. Дифференцируемость функции 6. Геометрический смысл производной 7. Производные некоторых основных элементарных функций 8. Основные правила дифференцирования 9. Производная обратной функции 10. Производные обратных тригонометрических функций 11. Производная сложной функции § 12. Производные гиперболических функций 13. Производная степенной функции с любым показателем 14. Сводная таблица формул дифференцирования 15. Неявные функции и их дифференцирование 16. Уравнения касательной а нормали к кривой 17. Графическое дифференцирование § 2. ПРОИЗВОДНЫЕ ВЫСШИХ ПОРЯДКОВ 1. Нахождение производных высших порядков 2. Механический смысл второй производной § 3. ДИФФЕРЕНЦИАЛ ФУНКЦИИ 2. Производная как отношение дифференциалов 3. Дифференциал суммы, произведения и частного функций 4. Дифференциал сложной функции. Инвариантность формы дифференциала 5. Применение дифференциала к приближенным вычислениям 6.  Дифференциалы высших порядков Дифференциалы высших порядков§ 4. ФУНКЦИИ, ЗАДАННЫЕ ПАРАМЕТРИЧЕСКИ, И ИХ ДИФФЕРЕНЦИРОВАНИЕ 2. Дифференцирование функций, заданных параметрически § 5. ВЕКТОРНАЯ ФУНКЦИЯ СКАЛЯРНОГО АРГУМЕНТА 2. Векторная функция скалярного аргумента и ее производная 3. Уравнения касательной прямой и нормальной плоскости к пространственной кривой 4. Механический смысл первой и второй производных векторной функции скалярного аргумента § 6. НЕКОТОРЫЕ ТЕОРЕМЫ О ДИФФЕРЕНЦИРУЕМЫХ ФУНКЦИЯХ 2. Теорема Ролля 3. Теорема Лагранжа 4. Правило Лопиталя § 7. ПРИЛОЖЕНИЕ ПРОИЗВОДНОЙ К ИССЛЕДОВАНИЮ ФУНКЦИЙ И ПОСТРОЕНИЮ ГРАФИКОВ 2. Максимум и минимум функции 3. Достаточный признак существования экстремума, основанный на знаке второй производной 4. Отыскание наибольшего и наименьшего значений функции 5. Применение теории максимума и минимума к решению задач 6. Выпуклость и вогнутость графика функции. Точки перегиба 7. Асимптоты графика функции 8. Общая схема исследования функции и построение ее графика § 8.  ПРИБЛИЖЕННОЕ РЕШЕНИЕ УРАВНЕНИЙ ПРИБЛИЖЕННОЕ РЕШЕНИЕ УРАВНЕНИЙ2. Уточнение найденных значений корней методом хорд и касательных § 9. ИНТЕРПОЛЯЦИОННАЯ ФОРМУЛА ЛАГРАНЖА ГЛАВА VII. НЕОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ § 1. НЕОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ И ЕГО СВОЙСТВА 2. Геометрический смысл неопределенного интеграла 3. Таблица основных интегралов 4. Основные свойства неопределенного интеграла § 2. ОСНОВНЫЕ МЕТОДЫ ИНТЕГРИРОВАНИЯ 2. Интегрирование методом замены переменной 3. Интегрирование по частям § 3. ИНТЕГРИРОВАНИЕ РАЦИОНАЛЬНЫХ ФУНКЦИЙ 2. Рациональные дроби. Выделение правильной рациональной дроби 3. Интегрирование простейших рациональных дробей 4. Разложение правильной рациональной дроби на простейшие дроби 5. Метод неопределенных коэффициентов 6. Интегрирование рациональных дробей § 4. Интегрирование тригонометрических функций 2. Рациональные функции двух переменных 3. Интегралы вида § 5. ИНТЕГРИРОВАНИЕ НЕКОТОРЫХ ИРРАЦИОНАЛЬНЫХ ФУНКЦИЙ 2. Интеграл вида 3.  Интегралы видов Интегралы видов4. Интегралы вида § 6. ОБЩИЕ ЗАМЕЧАНИЯ О МЕТОДАХ ИНТЕГРИРОВАНИЯ. ИНТЕГРАЛЫ, НЕ БЕРУЩИЕСЯ В ЭЛЕМЕНТАРНЫХ ФУНКЦИЯХ 2. Понятие об интегралах, не берущихся в элементарных функциях ГЛАВА VIII. ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ § 1. ЗАДАЧИ, ПРИВОДЯЩИЕ К ОПРЕДЕЛЕННОМУ ИНТЕГРАЛУ 2. Задача о работе переменной силы § 2. ОПРЕДЕЛЕННЫЙ ИНТЕГРАЛ 2. Свойства определенного интеграла 3. Производная интеграла по переменной верхней границе 4. Формула Ньютона—Лейбница 5. Замена переменной в определенном интеграле 6. Интегрирование по частям в определенном интеграле § 3. ГЕОМЕТРИЧЕСКИЕ И ФИЗИЧЕСКИЕ ПРИЛОЖЕНИЯ ОПРЕДЕЛЕННОГО ИНТЕГРАЛА 2. Вычисление площади в полярных координатах 3. Вычисление объема тела по известным поперечным сечениям 4. Объем тела вращения 5. Длина дуги кривой 6. Дифференциал дуги 7. Площадь поверхности вращения 8. Общие замечания о решении задач методом интегральных сумм § 4. КРИВИЗНА ПЛОСКОЙ КРИВОЙ 2.  Вычисление кривизны Вычисление кривизны3. Радиус кривизны. Круг кривизны. Центр кривизны 4. Эволюта и эвольвента § 5. НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ 2. Интегралы от разрывных функций 3. Признаки сходимости несобственных интегралов § 6. ПРИБЛИЖЕННЫЕ МЕТОДЫ ВЫЧИСЛЕНИЯ ОПРЕДЕЛЕННЫХ ИНТЕГРАЛОВ 2. Метод трапеций 3. Метод параболических трапеций (метод Симпсона) ГЛАВА IX. ДИФФЕРЕНЦИАЛЬНОЕ ИСЧИСЛЕНИЕ ФУНКЦИЙ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ § 1. ФУНКЦИИ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ 2. График функции двух переменных 3. Функции трех и большего числа переменных § 2. Предел функции нескольких переменных. Непрерывность функции. Точки разрыва 2. Непрерывность функции нескольких переменных 3. Понятие области 4. Точки разрыва 5. Свойства функций, непрерывных в ограниченной замкнутой области § 3. ЧАСТНЫЕ ПРОИЗВОДНЫЕ 2. Геометрический смысл частных производных функции двух переменных 3. Частные производные высших порядков § 4. ПОЛНЫЙ ДИФФЕРЕНЦИАЛ ФУНКЦИИ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ 2.  Полный дифференциал функции Полный дифференциал функции3. Приложение полного дифференциала к приближенным вычислениям § 5. Дифференцирование сложных и неявных функций 2. Инвариантность формы полного дифференциала 3. Дифференцирование неявных функций § 6. СКАЛЯРНОЕ ПОЛЕ 2. Производная по направлению 3. Градиент 4. Касательная плоскость а нормаль к поверхности 5. Геометрический смысл полного дифференциала функции двух переменных § 7. ЭКСТРЕМУМ ФУНКЦИЙ ДВУХ ПЕРЕМЕННЫХ 2. Наибольшее и наименьшее значения функции двух переменных ГЛАВА X. КРАТНЫЕ И КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ § 1. ДВОЙНОЙ ИНТЕГРАЛ 2. Двойной интеграл. Теорема существования 3. Свойства двойного интеграла 4. Вычисление двойного интеграла в декартовых координатах 5. Вычисление двойного интеграла в полярных координатах 6. Приложения двойного интеграла § 2. ТРОЙНОЙ ИНТЕГРАЛ 2. Тройной интеграл и его свойства 3. Вычисление тройного интеграла в декартовых координатах 4. Вычисление тройного интеграла в цилиндрических координатах 5.  Приложения тройного интеграла Приложения тройного интеграла§ 3. КРИВОЛИНЕЙНЫЙ ИНТЕГРАЛ 2. Задача о работе. Криволинейный интеграл 3. Вычисление криволинейного интеграла 4. Формула Остроградского — Грина 5. Независимость криволинейного интеграла от пути интегрирования 6. Отыскание первообразной по полному дифференциалу 7. Криволинейный интеграл по длине дуги ГЛАВА XI. РЯДЫ § 1. ЧИСЛОВЫЕ РЯДЫ 2. Геометрическая прогрессия 3. Простейшие свойства числовых рядов 4. Необходимый признак сходимости ряда 5. Достаточные признаки сходимости знакоположительных рядов 6. Знакопеременные ряды 7. Остаток ряда и его оценка § 2. ФУНКЦИОНАЛЬНЫЕ РЯДЫ 2. Правильно сходящиеся функциональные ряды и их свойства § 3. СТЕПЕННЫЕ РЯДЫ 2. Свойства степенных рядов 3. Ряды по степеням разности х-а 4. Разложение функций в степенные ряды. Ряд Тейлора 5. Разложение некоторых элементарных функций в ряды Тейлора и Маклорена § 4. ПРИЛОЖЕНИЕ РЯДОВ К ПРИБЛИЖЕННЫМ ВЫЧИСЛЕНИЯМ 2.  Приближенное вычисление интегралов Приближенное вычисление интегралов§ 5. ПОНЯТИЕ О ФУНКЦИИ КОМПЛЕКСНОЙ ПЕРЕМЕННОЙ. СТЕПЕННЫЕ РЯДЫ В КОМПЛЕКСНОЙ ОБЛАСТИ 2. Числовые ряды с комплексными членами 3. Степенные ряды в комплексной области § 6. РЯДЫ ФУРЬЕ 2. Ряд Фурье 3. Сходимость ряда Фурье 4. Ряды Фурье для четных и нечетных функций 5. Разложение в ряд Фурье функций с периодом 2l ГЛАВА XII. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ § 1. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ПЕРВОГО ПОРЯДКА 2. Дифференциальные уравнения первого порядка 3. Уравнения с разделяющимися переменными 4. Однородные уравнения 5. Линейные уравнения 6. Уравнение в полных дифференциалах 7. Особые решения 8. Приближенное решение дифференциальных уравнений первого порядка методом Эйлера § 2. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 2. Простейшие уравнения второго порядка, допускающие понижение порядка 3. Понятие о дифференциальных уравнениях высших порядков § 3. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА 2.  Линейные однородные дифференциальные уравнения второго порядка Линейные однородные дифференциальные уравнения второго порядка3. Линейные неоднородные дифференциальные уравнения второго порядка 4. Метод вариации произвольных постоянных § 4. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВТОРОГО ПОРЯДКА С ПОСТОЯННЫМИ КОЭФФИЦИЕНТАМИ 2. Линейные неоднородные дифференциальные уравнения второго порядка с постоянными коэффициентами 3. Приложение линейных дифференциальных уравнений второго порядка к изучению механических и электрических колебаний § 5. ЛИНЕЙНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ВЫСШИХ ПОРЯДКОВ 2. Линейные дифференциальные уравнения n-го порядка с постоянными коэффициентами § 6. ИНТЕГРИРОВАНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ С ПОМОЩЬЮ РЯДОВ § 7. ПОНЯТИЕ О СИСТЕМАХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 2. Системы линейных дифференциальных уравнений с постоянными коэффициентами ПРИЛОЖЕНИЕ 1. ИНТЕРПОЛЯЦИОННАЯ ФОРМУЛА НЬЮТОНА ПРИЛОЖЕНИЕ 2. МЕТОД НАИМЕНЬШИХ КВАДРАТОВ |
 Е. и др. Краткий курс высшей математики. Учеб. пособие для втузов. М., «Высш. школа», 1972. 640 с.
Е. и др. Краткий курс высшей математики. Учеб. пособие для втузов. М., «Высш. школа», 1972. 640 с.
Линейная функция — Math Insight
Линейная функция — Math InsightЛинейная функция
Линейная функция, пожалуй, самая важная функция в математике.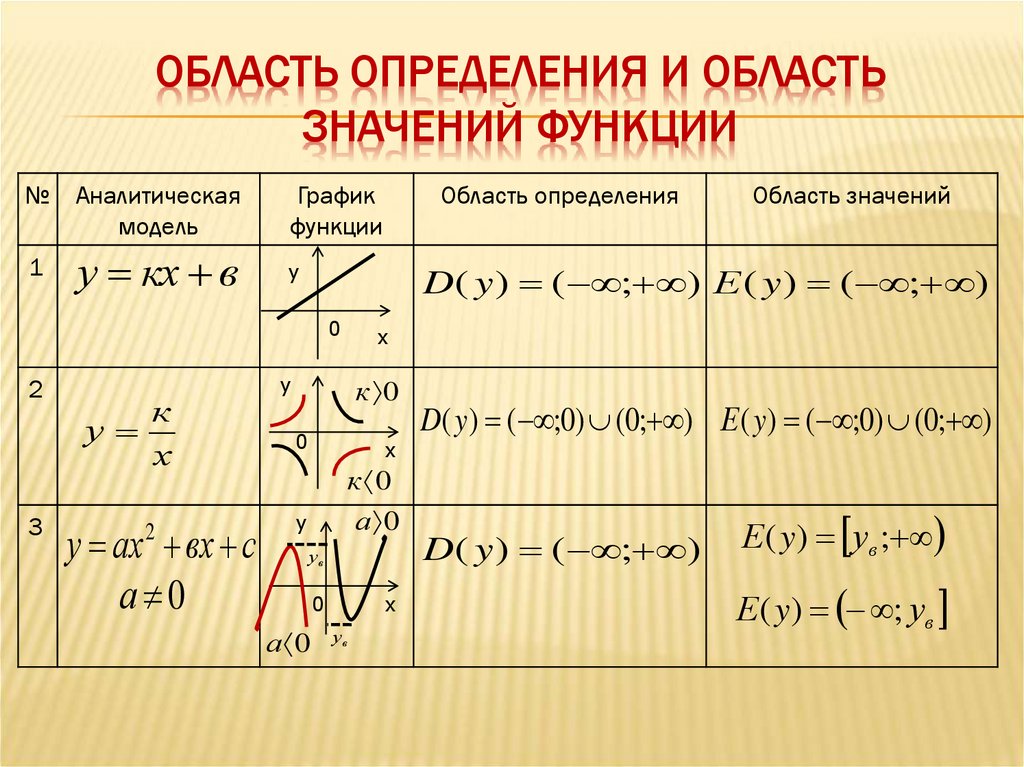 Это одна из самых простых функций для понимания, и она часто появляется, когда вы меньше всего этого ожидаете. Поскольку это так приятно, мы часто упрощаем более сложные функции до линейных, чтобы понять аспекты сложных функций.
Это одна из самых простых функций для понимания, и она часто появляется, когда вы меньше всего этого ожидаете. Поскольку это так приятно, мы часто упрощаем более сложные функции до линейных, чтобы понять аспекты сложных функций.
К сожалению, термин «линейная функция» означает разные вещи. К счастью, различие довольно простое. Сначала мы наметим строгое определение линейной функции, которое является излюбленным вариантом в высшей математике. Затем мы обсудим мятежное определение линейной функции, которое обычно изучается в элементарной математике, но является мятежным определением, поскольку такая функция не является линейной.
Строгий взгляд на линейную функцию
С одной переменной линейная функция чрезвычайно проста. Линейная функция имеет вид $$f(x)=ах,$$ где параметр $a$ — любое действительное число. График $f$ — это линия, проходящая через начало координат, а параметр $a$ — это наклон этой линии.
Линейная функция одной переменной. Линейная функция $f(x)=ax$ иллюстрируется ее графиком, который показан зеленой линией. Поскольку $f(0)=a \times 0 =0$, граф всегда проходит через начало координат $(0,0)$. Вы можете изменить $f$, введя новое значение для $a$ или перетащив синюю точку с помощью мыши. Параметр $a$ представляет собой наклон линии, показанный заштрихованным треугольником.
Поскольку $f(0)=a \times 0 =0$, граф всегда проходит через начало координат $(0,0)$. Вы можете изменить $f$, введя новое значение для $a$ или перетащив синюю точку с помощью мыши. Параметр $a$ представляет собой наклон линии, показанный заштрихованным треугольником.
Дополнительная информация об апплете.
Одним из важных следствий этого определения линейной функции является то, что $f(0)=0$, независимо от того, какое значение вы выберете для параметра $a$. Этот факт является причиной того, что график $f$ всегда проходит через начало координат. По этому строгому определению линейной функции функция $$g(x) = 3x +2$$ является , а не линейной функцией, поскольку $g(0) \ne 0$.
Почему так настаивают на том, что $f(0)=0$ для любой линейной функции $f$? Причина в том, что в математике (кроме элементарной математики) мы не определяем линейность требованием, чтобы график был линией. Вместо этого нам потребуются определенные свойства функции $f(x)$, чтобы она была линейной.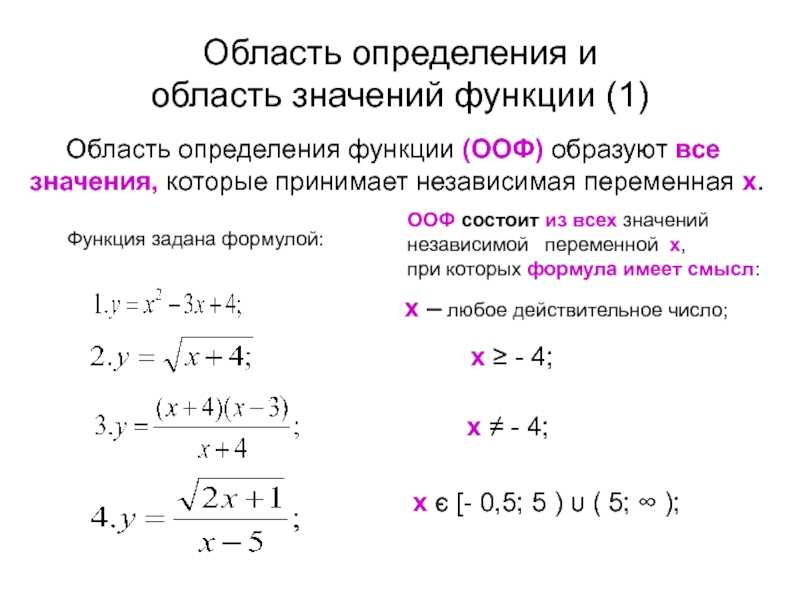
Одно из важных требований к линейной функции: удвоение входа $x$ должно удвоить выход функции $f(x)$. Легко видеть, что функция $g(x)$ не проходит этот тест. Например, $g(1)=5$ и $g(2)=8$, что означает, что $g(2) \ne 2g(1)$. Мы можем записать это требование для линейной функции $f$ как $$f(2x)=2f(x)$$ для любого входа $x$. Если $f(x)=ax$, то $f(2x)=2ax$ и $2f(x)=2ax$, значит, это требование выполнено.
Чтобы выполнить это требование удвоения, мы должны иметь $f(0)=0$. Это следует из того, что если вы удвоите ноль, то получите ноль обратно. Следовательно, требование удвоения означает, что $f(0)=2f(0)$, поэтому $f(0)$ — это число, которое останется тем же, если его удвоить; т. е. $f(0)=0$.
Кстати, для линейной функции это свойство должно выполняться для любого числа, а не только для числа 2. Линейная функция должна удовлетворять условию $f(cx)=cf(x)$ для любого числа $c$. Другое требование к линейной функции состоит в том, что применение $f$ к сумме двух входных данных $x$ и $y$ равносильно суммированию результатов применения к входным данным по отдельности, т. е. $f(x+y )=f(x)+f(y)$.
е. $f(x+y )=f(x)+f(y)$.
Мятежный взгляд на линейную функцию
Мятежный взгляд на линейную функцию состоит в вызове любой функции вида $$f(x)=ax+b$$ линейная функция, так как ее график представляет собой прямую.
Аффинная функция одной переменной. Аффинная функция $f(x)=ax+b$ иллюстрируется ее графиком, который показан зеленой линией. Поскольку $f(0)=a \times 0 +b=b$, график всегда проходит через ось $y$ в точке $(0,b)$, которая показана серой точкой. Вы можете изменить $f$, введя новые значения для $a$ или $b$ или перетащив мышью синие точки. Параметр $a$ представляет собой наклон линии, показанный заштрихованным треугольником.
Дополнительная информация об апплете.
Однако, как упоминалось выше, этот тип функции с $b \ne 0$ не удовлетворяет свойствам линейности. Таким образом, чтобы назвать $f$ линейной функцией, мы должны бунтарски игнорировать такие факты об обратном. Строго говоря, если $b \ne 0$, то $f$ следует называть аффинной функцией, а не линейной функцией.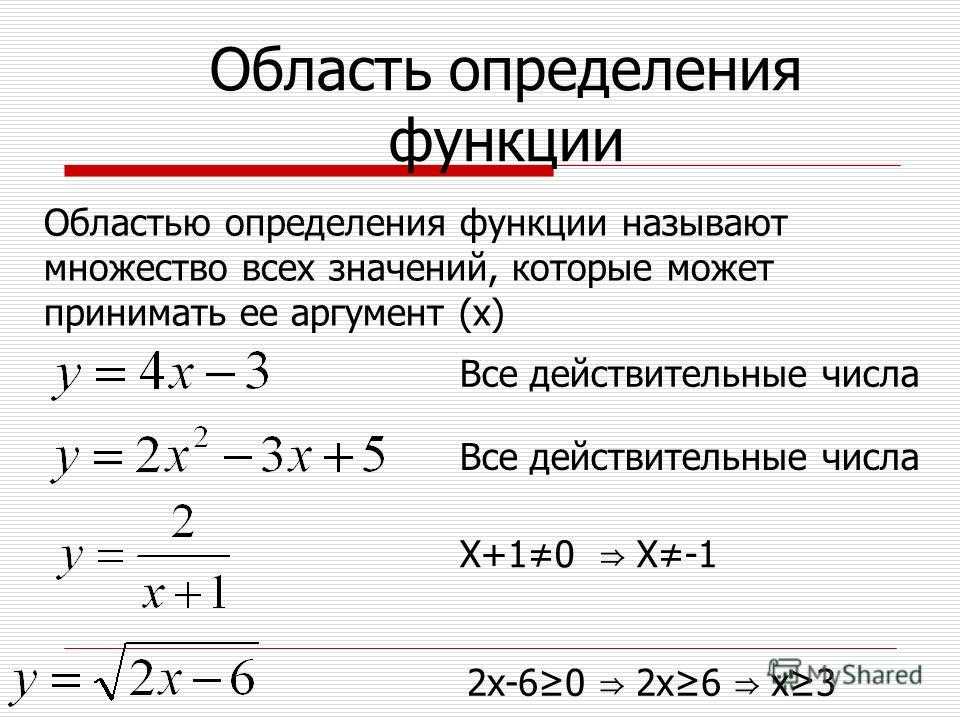
Учитывая, что этот мятежный взгляд прочно укоренился в элементарной математике, мы могли бы иногда присоединиться к этой терминологии и использовать ее. Если не кажется целесообразным настаивать на различии, мы могли бы использовать термин линейная функция вместо того, чтобы на самом деле использовать термин аффинная функция.
В других контекстах свойства линейности имеют решающее значение для математического анализа. В таких случаях мы будем настаивать на том, чтобы линейная функция $f(x)$ действительно удовлетворяла условию $f(0)=0$, и проводить различие между линейными и аффинными функциями.
Похожие страницы
Иди глубже
Дополнительные функции лабораторного прицела: математика, маски, механическое движение и магия: часть вторая
Опубликовано 29 июня 2021 г.
Во второй части серии из трех статей рассматривается применение расширенных функций осциллографа к реальной диагностике с использованием математики, масок, механического движения и магии
(Читать первую часть)
Гэри Смит
Математика:
DSO (цифровые запоминающие осциллографы) и MSO (осциллографы смешанных сигналов) обычно содержат некоторые функции математического канала. Математические каналы используются для быстрого расчета данных, касающихся электрических характеристик или производительности цепи или устройства.
Математические каналы используются для быстрого расчета данных, касающихся электрических характеристик или производительности цепи или устройства.
Некоторые производители предоставляют несколько основных (закон Ома) предварительно настроенных математических каналов для использования, а программное обеспечение других осциллографов также позволит вам самостоятельно писать сложные математические уравнения для целей электротехники, работы цепей или анализа неисправностей.
Функциональность и выбор опций зависят от того, какой прицел у вас есть. В осциллографах TiePie/DiagNation и PICO доступны как предустановленные, так и настраиваемые математические каналы, как и в других распространенных автомобильных лабораторных осциллографах. В таких осциллографах, как ATS (Automotive Test Solutions), есть часть волшебства, предварительно запрограммированного в запатентованном функциональном программном обеспечении, которое минимально настраивается по дизайну, но обеспечивает мощные диагностические результаты с удобным подключением и интуитивно понятным программным обеспечением.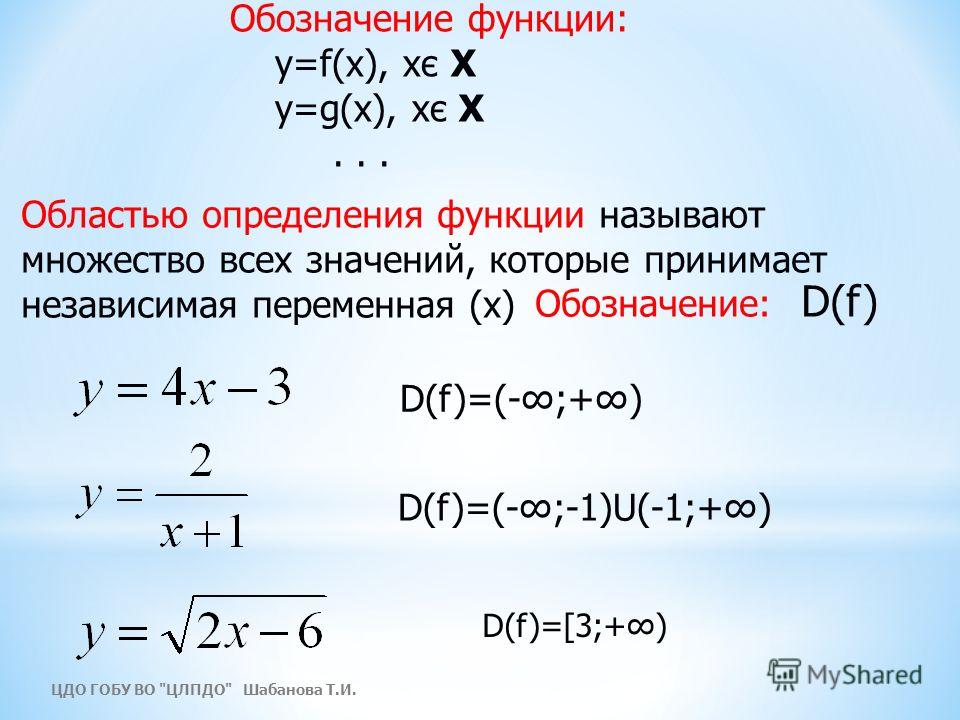
Рис. 1. На этом снимке экрана TiePie, а также в популярном программном обеспечении PICO можно выбирать эти основные математические каналы. Технический специалист также может вводить «определяемые пользователем» расчеты математического канала.
Простые основные математические каналы, такие как 1-2, 1+2, 1X2, 1/2, как правило, предоставляются в большинстве пакетов программного обеспечения DSO и очень удобны для использования техническими специалистами для расчета различных основных анализов цепей, таких как рабочие сопротивления цепей. управляющие нагрузки или применить закон Ома для неизвестных параметров цепи, например:
Вычисление Напряжение канала 1 деленное на (/) Ток канала 2 равно рабочему сопротивлению нагрузки. Это может помочь поймать прерывистый сигнал; просто измерьте цепь нагрузки, пока она работает нормально, и запишите результат «заведомо исправной» цепи.
Затем, когда вы регистрируете неисправность, знание правильного рабочего сопротивления нагрузки может привести вас к высокому сопротивлению или короткому замыканию, в зависимости от того, в каком направлении движется рабочее сопротивление нагрузки при неисправности цепи…
Другой пример: использование Канал 1 Напряжение (X) Канал 2 Ток для получения рассеиваемой мощности в ваттах для решения схемы, которая сжигает резисторы.
Или для испытаний на падение напряжения, анализа изменений частоты и диагностики форм сигналов NVH, а также для отслеживания и обнаружения пропаданий входных и выходных цепей управления.
Напряжение канала 1 минус (-) Напряжение канала 2 на двух концах провода дает падение напряжения.
КаналыMath могут быть чрезвычайно полезны для анализа цепей, вплоть до инженерного уровня, если вы знакомы как с анализом цепей, так и с электрическим поведением.
Возможности, если ваше программное обеспечение позволяет вам писать собственные математические каналы, безграничны.
математических канала настроены для предоставления всех форм данных, от угла фазы электрического поля до угла фазы магнитного поля; быстрый смоделированный (расчетный) дифференциальный анализ сигналов, также известный как «Дифференциальный зонд бедняка», используемый для анализа CAN; FlexRay и другие сети во время отладки; и этот список можно продолжать и продолжать.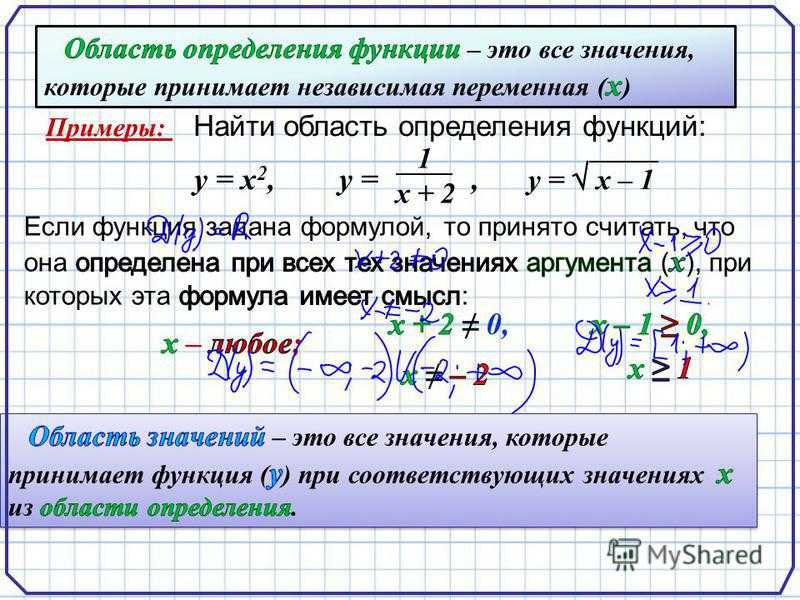
Сегодня на различных форумах технических специалистов часто делятся некоторыми классными математическими формулами для анализа различных аномалий производительности схемы или нагрузки. И последовательное декодирование сегодня включено во многие области. Я настоятельно рекомендую изучить функции вашего математического канала в вашем прицеле. Просто настройте несколько собственных экспериментальных тестов. После того как вы примените основы, в некоторых областях появятся расширенные математические каналы, которые также можно настроить и использовать (см. рис. 1).
На рис. 2 показаны определяемые программным обеспечением TiePie расширенные математические каналы для изучения и использования в вашей области DSO/MSO. (У Pico они тоже есть.) Вы будете удивлены, насколько полезными могут быть эти математические каналы, когда вы примените их на практике.
Маски… и тревоги
Маски и сигналы тревоги — очень полезные инструменты в DSO. Определенная «Маска» предназначена для создания основанного на параметрах набора правил для нормальной работы цепи, поведения нагрузки или формы сигнала, а затем установки функции «Маска» программного обеспечения для идентификации каждый раз, когда сигнал цепи или устройства превышает, ниже, отличается от или мешает параметры настройки маски.
Определенная «Маска» предназначена для создания основанного на параметрах набора правил для нормальной работы цепи, поведения нагрузки или формы сигнала, а затем установки функции «Маска» программного обеспечения для идентификации каждый раз, когда сигнал цепи или устройства превышает, ниже, отличается от или мешает параметры настройки маски.
На рис. 3 показана настройка PicoScope с маской параметров, выделенной розовым цветом. Когда сигнал выходит за пределы установленных параметров, звучит сигнал тревоги, чтобы предупредить техника. Реальная диагностика.
Эти типы программных инструментов являются динамическими, помогая техническим специалистам обнаруживать перемежающиеся помехи: все, от проблем с проводкой, обрывов, коротких замыканий всех видов, перепадов напряжения, паразитного потребления и многого другого. С помощью масок и аварийных сигналов мы можем обнаруживать сбои внутренней цепи или связи узла CAN… что бы вы ни назвали, вы обычно можете получить ответ на любую проблему с цепью с помощью должным образом продуманного набора математических каналов, масок и аварийных сигналов.
На рис. 4 показано, что инжектор «двойное срабатывание», когда этого не должно происходить, и подается звуковой сигнал.
Определенные осциллографы также позволяют техническим специалистам или инженерам создавать заведомо исправную форму сигнала, настраивать пользовательскую маску для мониторинга поведения конкретной цепи или нарушения порогового значения, а затем устанавливать сигнал тревоги для этих параметров. Затем их можно сохранить, а затем неисправные автомобили можно запустить в одном и том же предварительно заданном тесте, чтобы выявить известную проблему с платформой.
Почему это интересно исследовать? Думаю об этом! Если бы вы могли установить маску и сигнал тревоги для отказа реле, проблемы с производительностью драйвера схемы ШИМ или определенного порогового значения тока… тогда просто ведите машину, пока не раздастся звуковой сигнал…? Что может быть лучше, креативнее (и умнее) диагностического метода, чем этот?
Изучите свое программное обеспечение немного глубже и поэкспериментируйте со своими масками, сигналами тревоги и функциями математических каналов.