Хлорный ангидрид представляет собой бесцветную маслянистую жидкость. Cl2O7 взрывается при нагревании выше 120 °C и от удара, однако он более устойчив, чем оксид и диоксид хлора. Жидкий Cl2О7 устойчив до 60—70 °C, но примесь низших оксидов хлора существенно ускоряет его распад:
ΔH = 135 кДж/моль
Медленно растворяется в холодной воде, образуя хлорную кислоту:
Хлорный ангидрид является сильным окислителем.
Получение
Получают Cl2О7 при осторожном нагревании хлорной кислоты с фосфорным ангидридом или олеумом:
Оксид хлора(VII) получают также электролизом раствора НClО4 на платиновых электродах ниже 0 °C (Cl2O7 накапливается в анодном пространстве). Чистый Cl2O7 можно синтезировать также при нагревании в вакууме некоторых перхлоратов, например, Nb(ClO4)5 или МоО2(ClO4)2.
Литература
Реми Г. «Курс неорганической химии» М.: Иностранная литература, 1963
dic.academic.ru
Оксид хлора(VII) — Википедия. Что такое Оксид хлора(VII)
Материал из Википедии — свободной энциклопедии
Окси́д хло́ра(VII) (дихлорогептаоксид) Cl2O7,
(хлорный ангидрид) — кислотный оксид. Высший оксид хлора, в котором он проявляет степень окисления +7.
Хлорный ангидрид представляет собой бесцветную маслянистую ядовитую жидкость. Cl2O7 взрывается при нагревании выше 120 °C и от удара, однако он более устойчив, чем оксид и диоксид хлора. Жидкий Cl2О7 устойчив до 60—70 °C, но примесь низших оксидов хлора существенно ускоряет его распад:
Оксид хлора(VII) получают также электролизом раствора НClО4 на платиновых электродах ниже 0 °C (Cl2O7 накапливается в анодном пространстве). Чистый Cl2O7 можно синтезировать также при нагревании в вакууме некоторых перхлоратов, например, Nb(ClO4)5 или МоО2(ClO4)2.
Литература
Реми Г. «Курс неорганической химии» М.: Иностранная литература, 1963
wiki.sc
Как получить оксиды хлора 🚩 формула оксида хлора 🚩 Естественные науки
Хлор образует с кислородом целый ряд оксидов, общее число которых составляет целых пять видов. Все их можно описать общей формулой ClxOy. В них валентность хлора меняется от 1 до 7.
Оксид хлора(I) применяют для производства гипохлоритов, которые являются сильными отбеливающими и обеззараживающими агентами. Оксид хлора(II) активно применяют для отбеливания муки, целлюлозы, бумаги и других вещей, а также для стерилизации и дезинфекции. Оксид хлора(VI) и оксид хлора(VII) применяют для синтеза органических соединений.
Данный оксид на крупнотоннажных производствах получают двумя способами. 1. По методу Пелуза. Проводят реакцию между газообразным хлором и оксидом ртути. В зависимости от условий может образоваться иное соединение ртути, однако целевой продукт остается. После этого газообразный оксид хлора сжижают при температуре -60 градусов Цельсия.
2. Взаимодействие хлора с водным раствором карбоната натрия по реакции: 2Cl2 + 2Na2CO3 + h3O = 2NaHCO3 + Cl2O + 2NaCl Карбонат натрия может быть заменен другими карбонатами щелочных или щелочноземельных металлов.
Единственный промышленный метод получения диоксида хлора основан на взаимодействии хлората натрия и диоксида серы в кислой среде. Результатом такого взаимодействия становится реакция: 2NaClO3 + SO2 + h3SO4 = 2NaHSO4 + ClO2
В промышленности Cl2O6 получают взаимодействием диоксида хлора с озоном: 2ClO2 + 2O3 = 2O2 + Cl2O6
1. Осторожное нагревание хлорной кислоты с фосфорным ангидридом приводит к отделению маслянистой жидкости, которая является оксидом хлора (VII). Весь процесс описывается реакцией: 2HClO4 + P4O10 = h3P4O11 + Cl2O7
2. Второй способ получения данного оксида связан с электричеством. Если проводить электролиз раствора хлорной кислоты, то в анодном пространстве можно обнаружить Cl2O7.
3. Нагревание в вакууме перхлоратов переходных металлов приводит к образованию оксида хлора (VII). Наиболее часто нагревают перхлорат ниобия либо молибдена.
Cl2O: при стандартных условиях буровато-желтый газ с запахом хлора, а при температуре ниже +2 градусов Цельсия золотисто-красная жидкость. Взрывоопасен в больших концентрациях.
ClO2: при стандартных условиях – газ с характерным запахом красно-желтого цвета, при температуре ниже +10 градусов Цельсия – красно-коричневая жидкость. Взрывается на свету, в присутствии восстановителей и при нагревании.
Cl2O6: неустойчивый газ, который начинает разлагаться при температуре от 0 до +10 градусов Цельсия с образованием диоксида хлора, при 20 градусах Цельсия образуется хлор. Ввиду образования диоксида хлора – взрывоопасен.
Cl2O7: бесцветная маслянистая жидкость, которая при нагревании выше 120 градусов Цельсия взрывается. Может детонировать от удара.
Хлорная кислота, растворенная в воде, считается самой сильной среди одноосновных кислот. Она имеет ярко выраженные свойства окислителя и применяется в качестве катализатора.
Содержание статьи
Хлорная кислота представляет собой бесцветную жидкость, сильно дымящуюся и быстро испаряющуюся на воздухе. Хлор в ее составе имеет максимальную степень окисления, характерную для него, поэтому эта кислота является сильнейшим окислителем. Хорошо растворяется в органических растворителях: хлороформе, хлористом метилене, а также в воде (в любых соотношениях, образуя гидраты). Концентрированные водные растворы хлорной кислоты имеют маслянистую консистенцию. Ее соли называются перхлоратами.
Хлорная кислота — взрывоопасное вещество. При обращении с ней требуется повышенная осторожность (разрешается хранение только в плотно закрытых емкостях). Помещения, где содержатся емкости, должно хорошо проветриваться. Не допускаются перепады температуры. Это не касается ее водных растворов, они не так опасны. Их окислительная способность в несколько раз ниже, они не могут взорваться и обладают довольно хорошей устойчивостью. Нельзя смешивать хлорную кислоту с растворами-окислителями. Она считается одной из сильнейших кислот. Даже некоторые кислотные соединения, попадая в нее, ведут себя как основания.
В промышленности получают водный раствор хлорной кислоты, а также безводный аналог. Последний вид можно получить с помощью реакции перхлората калия или натрия с концентрированной серной кислотой. Существует и второй способ: взаимодействие олеума с разбавленной серной кислотой. Водный раствор серной кислоты также можно получить двумя путями: при электрохимическом окислении хлора в концентрированной соляной кислоте или же через обменное разложение перхлоратов калия и натрия.
Хлорная кислота используется при разложении сложных руд на составляющие, а также в качестве катализатора. Она имеется во всех химических лабораториях, так как необходима для множества опытов по аналитической химии. Эта кислота применяется как сильный окислитель. Ее нельзя долго хранить, так как она способна самопроизвольно разлагаться, что может спровоцировать мощный взрыв.
Ее используют для получения перхлоратов. Перхлорат калия, соль, практически нерастворимая в воде, применяется при изготовлении взрывчатых веществ. Перхлорат магния, известный как ангидрон, выступает в роли осушителя, так как способен поглощать жидкости.
www.kakprosto.ru
Кислоты хлора | Дистанционные уроки
29-Окт-2012 | Нет комментариев | Лолита Окольнова
Хлор — самый богатый на кислоты элемент!
5 кислот — таким рекордом может похвастаться не каждый!
Хлор — элемент 7-й группы главной подгруппы и к тому же 3-го периода.
Что это означает?
Это означает много степеней окисления! 🙂
Т.к. элемент находится в 7-й группе, то ему не хватает всего 1 электрона до завершения электронной оболочки — минимальная степень окисления хлора = -1.
Т.к. хлор находится в 3-ем периоде, то он может распаривать электроны с p-подуровня на d-подуровень — степени окисления +1, +3, +5 и +7.
HCl — хлороводородная или соляная кислота.
Степень окисления хлора= -1.
Сильная кислота. Едкая жидкость, дымит на воздухе. В воде практически полностью диссоциирует на ионы:HCl = H(+) + Cl(-) .
Ей присущи все свойства кислот: взаимодействие с металлами до водорода, взаимодействие с основными оксидами, с основаниями, с солями.
При взаимодействии с окислителями окисляется до Cl2:
2HCl + h3SO4 = SO2 + Cl2↑ + 2h3O
2. HClO — хлорноватистая кислота.
Степень окисления хлора = +1.
Бесцветный раствор. Это очень слабая кислота. Неустойчивая. Небольшая степень диссоциации. Ей соответствует кислотный оксид Cl2O. Получение:
Сl2 + h3O = HCl + HClO
Cl2O + h3O = 2HClO
НО: это сильная кислота-окислитель: 2HClO + h3S = S + Cl2 + h3O
Cоли — гипохлориты.
3. HClO2 — хлористая кислота.
Степень окисления хлора = +3.
Бесцветная. Кислота средней силы. Неустойчивая. Ей соответствует кислотный оксид Cl2O3.
Проявляет окислительные свойства.
Соли — хлориты.
4. HClO3 — хлорноватая кислота.
Степень окисления хлора = +5
В свободном виде она не получена, «живет» только в растворах. Сильное вещество как просто кислота, и как кислота-окислитель. Кислотный оксид — Cl2O5.
Одна из самых сильных кислот, одна из самых сильных окислителей.
Взрывоопасна. Бесцветная, летучая, парит на воздухе.
Кислотный оксид — Cl2O7.
Соли — перхлораты.
Обратите внимание на изменение свойств кислот с изменением степени окисления:
хлор в минимальной степени окисления дает сильную кислоту, но не окислитель;
с увеличением степени окисления увеличивается сила кислот и окислительные свойства
Еще на эту тему:
Обсуждение: «Кислоты хлора»
(Правила комментирования)
distant-lessons.ru
Оксиды хлора — Википедия. Что такое Оксиды хлора
Материал из Википедии — свободной энциклопедии
Оксиды хлора — неорганические химические соединения хлора и кислорода, общей формулой: ClхOу. Хлор образует следующие оксиды: Cl2O, Cl2O2 (ClClO2), Cl2O3 (ClOClO2), ClO2 (радикал), Cl2O4 (ClOClO3), Cl2O6 (O2ClOClO3), Cl2O7. Кроме того известны неустойчивые соединения: пероксид хлора(I) ClOOCl, ClOClO, короткоживущий радикал ClO, радикал хлорпероксил ClOO и радикал триоксид хлора ClO3. Ниже в таблице представлены свойства устойчивых оксидов хлора:
Программа 1-2 класса. Примеры на яблоках, апельсинах, канфетах…
Если сначала выпить 0.5 а потом добавить 0.2 то и меньшее может оказаться большим
вы математику в школе проходили вообще??? какое число ближе к нулю то и больше следовательно 0,2<0,5…
touch.otvet.mail.ru
Что больше 1/5 или 2/5?
дааааа, хрен догадаешся
Мария, а что больше ОДИН или ДВА?
две пятых больше в два раза
Так трудно… 2/5 конечно больше!
ясно что 2/5 больше
1/5=0,2
2/5=0,4
0,2 меньше чем 0,4
1/5 меньше 2/5
хахахахаххахахаххахаххахаххахахаххаха)))))))))))!!!! конечно 2/5!!!
Если вы разделите пирог на 5 равных частей и возьмете одну такую часть, то это меньше оставшихся 2/5 пирога.
Это точно по программированию вопрос!
> Обосрали
Обтекай.
Или перекрашивайся в блондинко)
touch.otvet.mail.ru
Что больше 5/8 или 2/3 ?
1. приводим оба числа к общему знаменателю, он =24
2.Получается: 5/8 =-15/24; 2/3 =16/24
3.Значит, 2/3 больше 5/8 на 1/24
4.2/3 > 5/8
Девочка, серьёзно учи русский яз. и математику : списывать чужие знания вечно невозможно.
Пусть f иg – произвольные функции обобщенных координат, импуль-
сов и времени: f(q1,…,qn;p1,…,pn,t),g(q1,…,qn;p1,…,pn,t).Скобка Пуассона
определяется следующим образом:
n
∂f∂g
∂f∂g
{f, g}=
∑
−
.
(9.9)
j=1
∂pj ∂qj
∂qj ∂pj
Основные свойства скобок Пуассона (здесь f(q,p,t), g(q,p,t), h(q,p,t) –
функции, а αk – константы)
(1)
{f,g}= −{g,f}
(4) {∏ fk,g}= ∑ fl{∏ fk,g}
(a) {f,f}= 0
k
l k≠l
(a) {f1f2,g}= f1{f2,g}+ f2{f1,g}
(2)
{f,α}= {α,g}= 0
∂
{f,g}= {∂f,g}+ {f,
∂g}
{∑αkfk,g}= ∑αk{fk,g}
(5)
(3)
∂t
∂t
∂t
k
k
(6) {f, {g,h}}+ {h, {f,g}}+ {g, {h,f}}= 0
(a) {αf,g}= α{f,g}
(тождество Якоби)
(b) {f1 + f2,g}= {f1,g}+ {f2,g}
Очень просто вычисляются элементарные, или фундаментальные, скобки Пуассона:
{qj,qk}= 0, {pj,pk}= 0, {pj,qk}= δjk.
(9.10)
Зачем нужны скобки Пуассона?
a. С их помощью можно единообразным способом записать уравнения Гамильтона (9.2)
•
•
(9.11)
qj = {H,qj},
pj = {H,pj}.
б. Для произвольной функцииf(q,p,t) уравнения движения (полная производная по времени) имеют похожий вид
df(q,p,t)
=
∂f
+ {H,f}.
(9.12)
dt
∂t
Так, например, подставив вместо f(q,p,t) гамильтонианH(q,p,t) и воспользовавшись следствиемa первого свойства скобок Пуассона, мы мгновенно
Уравнения Гамильтона. Скобки Пуассона
198
получаем соотношение (9.8).
в. Еслиf иg – интегралы движения, то их скобка Пуассона, {f,g}, – также интеграл движения (теорема Пуассона). В ряде случае это помогает находить дополнительные интегралы движения и упрощает решение задач.
г. Наконец, скобка Пуассона является классическим аналогомкоммутатора, играющего важную роль в квантовой механике.
Примеры решения задач
Задача 4. Вычислить скобки Пуассона:
n
+ q3j
n
+ q2j
(а) {x,My}; (б) {ϕ,ψ}, гдеϕ = cos∑(p2j
)
,ψ = sin∑(p3j
) .
j=1
j=1
Решение. Можно сразу вычислить скобку Пуассона, «в лоб», исходя из определения (9.9), а можно найти скобку Пуассона, используя свойства этих скобок и постепенно сводя искомую скобку к более простым и даже известным. На примере (а) покажем оба варианта.
свойств, которые были применены при вычислениях. Теперь можно при решении других задач использовать полученный результат и считать {x,My} – «известной» скобкой Пуассона1.
(б) В этой задаче главное не ошибиться при вычислении частных производных от сложных функцийϕ(q,p) иψ(q,p)
∂ϕ
n
n
n
= −sin∑(p2j
+ q3j
)
∑2p jδjk = − 2pk sin∑(p2j
+ q3j
)
;
∂pk
j=1
j=1
j=1
∂ϕ
n
= −3qk2 sin∑(p2j
+ q3j
)
;
∂qk
j=1
∂ψ
n
∂ψ
n
∂p
= 3pk2 cos∑(p3j
+ q2j
)
; ∂q
= 2qk cos
∑(p3j
+ q2j
) .
k
j=1
k
j=1
Подставим их в определение (9.9), в котором поменяем индекс суммирования (j → k)
n
∂ϕ ∂ψ
∂ϕ ∂ψ
9
2 2
n
2
3
{ϕ,ψ}=∑
−
=
pkqk
− 2pk qk sin 2∑(p j
+ q j ) .
∂pk∂qk
2
k=1
∂qk∂pk
j=1
Задача 5. Показать, что, если функция Гамильтона зависит от переменныхq1 иp1 лишь опосредовано через функциюf(q1,p1), т.е.
H = H(f(q1,p1),q2,p2,…,qn,pn), тоf(q1,p1) – интеграл движения.
Решение. Другими словами нужно показать, чтоf(q1,p1) не изменяется во времени, т.е. является константой. С помощью скобок Пуассона решение укладывается в одну строчку. Воспользуемся определением
df
={H ,f }=
∂H ∂f
∂f
−
∂H ∂f
∂f
+
n
∂H
∂f
−
∂H∂f
= 0 ,
dt
∂f∂p
∂q
∂f∂q
∂p
∂p
∂q
∂q
∂p
∑
j
j
j
1
1
1
1
j=2
j
тогда первых два члена, где вычислены производные от сложной функции H = H(f,q2,p2,…,qn,pn), отличаются только знаками, а в последней сумме производные отf тождественно равны 0. Отсюда следует, что
1 Из соображений симметрии, кстати, сразу следует, что {y,Mz}= −x, {z,Mx}= −y.
1 ЛЕКЦИЯ 21 СКОБКИ ПУАССОНА. ТЕОРЕМА ЯКОБИ-ПУАССОНА. КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ 1. Скобки Пуассона На прошлой лекции вводилось понятие скобки Лагранжа. Это выражение было составлено из частных производных 2n функций φ, Ψ, j = 1,, n. Эти функции, в свою очередь, зависели от двух переменных x и y. Теперь рассмотрим две функции u и v, зависящие от 2n переменных: q 1,, q, p 1,, p. Также они могут зависеть от параметра t. Составим такие определители: u q v q u p v p Составим сумму всех этих определителей: = u q v p u p v q, i = 1,, n. (21.1) =1 ( u q v p u p v q ). (21.2) Выражение (21.2) называется скобкой Пуассона функций u и v. Будем обозначать её как (u, v). Приведём примеры вычисления скобок Пуассона. (q, q ) = 0, (21.3) так как все производные по p и p, стоящие в выражении (21.2), равны нулю. (p, p ) = 0, (21.4)
2 2 так как равны нулю все производные по q и q. (q, p ) = δ, (21.5) где δ символ Кронекера. Выражения (21.3), (21.4) и (21.5) называются фундаментальными, или основными скобками Пуассона. Перечислим основные свойства скобок Пуассона. В их справедливости можно убедиться непосредственной проверкой. 1. Линейность Пусть c либо константа, либо функция параметра t, тогда: (u, cv) = c (u, v). Пусть w функция тех же переменных, что и u и v, тогда: (w, u + v) = (w, u) + (w, v). 2. Кососимметричность: (u, v) = (v, u). 3. (u, u) = (u, v) = ( u v, v) + (u, ). 5. Пусть w функция переменных q 1,, q, p 1,, p, а c постоянная, Тогда: (w, c) = Тождество Лейбница: (w, u v) = (w, u) v + u (w, v). 7. Скобка Пуассона от сложной функции: (w, u (v 1,, v )) = u (w, v =1 v ). 8. Пусть f некоторая функция переменных Гамильтона q, p, t, тогда: (q, f) =, (p p, f) =. q 9. Тождество Якоби: ((u, v), w) + ((v, w), u) + ((w, u), v) = 0. Доказательство тождества Якоби требует длинных выкладок. Суть доказательства в том, что если расписать все скобки Пуассона по определению, то каждое слагаемое будет представлять собой произведение первых производных двух из этих функций на вторую производную третьей из них. Значит, нужно доказать, что все эти слагаемые взаимно уничтожаются. Покажем, например, что слагаемые со второй производной по u сокращаются: ((u, v), w) + ((w, u), v) = (w, (v, u)) (v, (w, u)). (21.6) Отсюда видно, что слагаемые со вторыми производными по u уничтожаются. Выпишем уравнения Гамильтона: dq dt = H p, dp dt = H q, i = 1, 2,, n. (21.7) Применяя свойство 8, их можно переписать в симметричном виде с помощью скобок Пуассона: dq dt = (q dp, H), dt = (p, H). (21.8)
3 3 Определение 58: Функции u и v находятся в инволюции, если их скобка Пуассона (u, v) равна нулю. Из тождества Якоби следует следующее утверждение: если как функция u, так и функция v находятся в инволюции с функцией w, то их скобка Пуассона тоже находится в инволюции с функцией w. Введение скобок Пуассона оказалось более плодотворным, чем введение скобок Лагранжа. В физике и математике эти скобки встречаются весьма часто. Например, они применяются в теории возмущений и в квантовой механике (перестановочные соотношения Гейзенберга). В теоретической механике скобки Пуассона позволяют описывать динамические величины способом, независящим от системы координат. Также они очень важны при исследовании интегралов уравнений движения. 2. Теорема Якоби Пуассона Отвлечёмся от динамики и просто запишем такую систему m уравнений: dx dt = X (x 1,, x, t), i = 1,, m. (21.9) Определение 59: Функция f(x 1,, x, t) называется интегралом, или первым интегралом системы уравнений (21.9), если она постоянна на траекториях этой системы. Иными словами, на траекториях системы должно выполняться равенство df dt = 0. Распишем полную производную по времени: + dx x =1 dt = + dx X = 0. (21.10) dt =1 Выражение (21.10) это необходимое и достаточное условие того, чтобы функция f была первым интегралом данной системы. Интегралы очень полезны при исследовании систем уравнений, определяющих движение системы. Наличие n независимых интегралов позволяет понизить порядок системы на n единиц. Пусть известно m интегралов: f (x 1,, x ) = c, i = 1,, m. (21.11) Поясним, что означает независимость интегралов. Введём векторы f, x f x 1. Производная вектора f по вектору x это матрица, составленная из частных x производных f по x : f 1 1 x = (f 1 1,, f ) (x 1,, x ) = x 1 x. (21.12) x 1 x
4 4 Интегралы (21.11) называются независимыми, если det f 0. Можно также x сказать, что они независимы, если не существует такой функции F (f 1,, f ), которая тождественно равна нулю при всех значениях x 1,, x. Это свойство не обязано быть глобальным важно, чтобы это выполнялось в окрестности определённой точки, для которой утверждается независимость интегралов. Вернёмся к основному повествованию. Поскольку интегралы (21.11) независимы, то по теореме о неявной функции можно разрешить эти уравнения относительно аргументов x : x = x (t, c 1,, c ), i = 1,, m. (21.13) Система уравнений Гамильтона не произвольна, но имеет определённую структуру. Иногда наличие одного интеграла позволяет понизить её порядок на две единицы, как в случае наличия циклической координаты. Количество необходимо интегралов, чтобы система уравнений была интегрируема при любых начальных условиях, определяет теорема Лиувилля, которая будет изучаться на одной из следующих лекций. Пусть система уравнений определяется уравнениями Гамильтона (23.1), функция Гамильтона системы H = H(q 1,, q, p 1,, p, t). Перепишем условие (21.10) в терминах гамильтоновой динамики. df = 0, (21.14) dt + ( dq q dt + dp p dt ) = + ( H H ) = + (f, H) = 0. (21.15) q p p q =1 =1 Итак, чтобы функция f(x 1,, x, t) была интегралом системы уравнений (23.1), необходимо и достаточно, чтобы выполнялось равенство + (f, H) = 0. (21.16) Теорема 29 (Теорема Якоби Пуассона) Если f 1 и f 2 интегралы системы уравнений Гамильтона, то их скобка Пуассона (f 1, f 2 ) постоянна на траекториях системы. Иногда эта теорема формулируется так: скобка Пуассона от двух первых интегралов тоже является первым интегралом. Однако нужно относиться к этому утверждению с осторожностью: может оказаться, что (f 1, f 2 ) равна числу, а число нельзя называть первым интегралом системы. Или же эта скобка Пуассона будет выражаться через f 1 и f 2, следовательно, не будет независимым первым интегралом. Док-во: Раз функции f 1, f 2 первые интегралы системы, то выполняются тождества Требуется доказать, что 1 + (f 1, H) = 0, 2 + (f 2, H) = 0. (21.17) (f 1, f 2 ) + ((f 1, f 2 ), H) = 0. (21.18)
5 5 Воспользуемся свойством 4 скобок Пуассона: (f 1, f 2 ) С учётом этого можно переписать формулу (21.18) в виде = ( 1, f 2) + (f 1, 2 ). (21.19) ( 1, f 2) + (f 1, 2 ) + ((f 1, f 2 ), H) = 0. (21.20) Подставим в формулу (21.20) равенства (21.17): ((f 1, H), f 2 ) (f 1, (f 2, H)) + ((f 1, f 2 ), H) = 0, (21.21) ((H, f 1 ), f 2 ) + ((f 2, H), f 1 ) + ((f 1, f 2 ), H) = 0. (21.22) Равенство (21.22) справедливо согласно тождеству Якоби. Следовательно, утверждение теоремы выполняется. С первого взгляда кажется, что при помощи теоремы Якоби можно получать новые интегралы, зная только два из них. На самом деле таким путём новые интегралы не получаются, за исключением некоторых редких случаев. Рассмотрим такой пример. Пусть функция Гамильтона не зависит от времени: H = H(q 1,, q, p 1,, p ). Тогда есть обобщённый интеграл энергии h = const. Пусть у системы также имеется также интеграл f(q 1,, q, p 1,, p, t) = const. Тогда = (f, H). По теореме Якоби Пуассона (f, H) = const на траекториях системы. Следовательно, = const. Если частные производные более высокого порядка от f по времени существуют, то они тоже равны нулю. Рис Пусть материальная точка единичной массы движется в центральном силовом поле. Обозначим координаты точки как q 1, q 2 и q 3. Тогда H = 1 2 (p2 1 + p p 2 3) + Π(r), где r = q1 2 + q2 2 + q2 3. У системы есть интеграл движения f 1 = q 2 p 3 q 3 p 2 = const. (21.23) Это следствие закона сохранения кинетического момента. Так как m = 1, то K = [h] v = i j k q 1 q 2 q 3. f 1 это проекция кинетического момента на ось q 1. Аналогично, p 1 p 2 p 3 у системы есть интегралы f 2 = q 3 p 1 q 1 p 3 = const, (21.24)
6 6 f 3 = q 1 p 2 q 2 p 1 = const. (21.25) Убедиться в том, что это первые интегралы, можно, вычислив скобки Пуассона от этих функций с функций Гамильтона: (f 1, H), (f 2, H), (f 3, H). Все три скобки равны нулю (вычисления можно проделать в качестве упражнения). Сделаем вид, будто неизвестно, является ли f 3 первым интегралом. Рассчитаем скобку (f 1, f 2 ): 3 (f 1, f 2 ) = ( ) = q q p p q 1 p 2 q 2 p 1 = f 3. (21.26) =1 Значит, по теореме Якоби Пуассона f 3 является первым интегралом. Рассмотрим ещё один пример. Пусть система представляет собой одномерный осциллятор с единичной частотой. Её функция Гамильтона H = 1 2 (q2 + p 2 ). Проверим, что функция f = q sin t + p cos t является первым интегралом. H +(f, H) = q cos t p sin t+ q p H p q = q cos t p sin t+p sin t q cos t = 0. (21.27) Следовательно, f действительно является интегралом. Как было вычислено в первом примере, частная производная должна быть равна нулю, так как H не зависит от времени. Значит, f 2 = = q cos t p sin t тоже интеграл. Вторая частная производная по времени от f равна f, так что новый интеграл при этом не появляется. Так и должно было получиться, так как в силу размерности задачи решение может зависеть только от двух произвольных постоянных. Получить новый интеграл с помощью скобок Пуассона идея заманчивая, но в большинстве случаев безнадёжная. Как правило, если f 1 и f 2 получены из основных теорем динамики, таких как теоремы об изменении количества движения, кинетического момента и кинетической энергии, то новый интеграл вышеописанным способом получить не удаётся. Если же интеграл не вытекает из основным теорем динамики, а свойственен именно этой конкретной задаче, то можно надеяться получить новый интеграл, пользуясь теоремой Якоби Пуассона. Например, в задаче трёх тел можно взять f 1 и f 2 компоненты кинетического момента, и одну из компонент вектора Лапласа. Тогда через скобки Пуассона можно получить новый интеграл. 3. Канонические преобразования Пусть имеется система дифференциальных уравнений в форме уравнений Гамильтона: dq dt = H p, dp dt = H q, i = 1, 2,, n. (21.28) Функция Гамильтона этой системы H = H(q 1,, q, p 1,, p, t). Уравнения (21.28) иногда могут быть легко проинтегрированы, если совершить подходящую замену переменных. Например, если в задаче двух тел уравнения записать в декартовых координатах, то циклической координата в них отсутствует, а если записать в полярных, то угол φ является циклической координатой, и можно понизить порядок системы уравнений на
7 7 2 единицы. Значит, для исследователя важно правильно подобрать обобщённые координаты. Уравнения Лагранжа обладают свойством ковариантности: можно посчитать кинетическую и потенциальную энергию в одних обобщённых координатах и по известному алгоритму записать эти уравнения. В других обобщённых координатах уравнения могут быть другими, но алгоритм их получения тот же самый. Но в лагранжевой механике нет эффективного алгоритма для упрощения интегрирования системы уравнений. Иногда удаётся упростить вычисления, но в общем случае это сделать не получается. В уравнениях Лагранжа q и t переменные, а q получаются из самих уравнений. Но если считать независимыми переменные q и p и перейти к уравнениям Гамильтона, то, хотя количество независимых переменных увеличивается, траектории в фазовом пространстве становятся более наглядными, и расширяется класс возможных преобразований, которые позволяют упрощать уравнения. Здесь названия «координаты» и «импульсы» условны, потому что в фазовом пространстве эти понятия совершенно равноправны. Рассмотрим простой пример. Пусть система имеет одну степень свободы, H = H(q, p). Сделаем формальную замену переменных q = P, p = Q. В новых переменных функция Гамильтона H = H( P, Q), а уравнения Гамильтона выглядят так: dq dt = H P, dp dt = H Q. (21.29) Итак, уравнения (21.29) полностью эквиваленты исходным уравнениям, хотя координата и импульс поменялись ролями. Значит, в уравнениях Гамильтона понятия координаты и импульса достаточно условны. Это одна из причин, почему q и p называются сопряжёнными, или канонически сопряжёнными переменными. В дальнейшем будем изучать замены переменных, которые позволяют упростить или создать основу для упрощения дифференциальных уравнений движения и, может быть, их последующего интегрирования. Для этого, прежде всего, удобно записать уравнения (21.28) в векторно-матричной форме. Введём 2n-мерный вектор x ( q ). Тогда H = p H( x, t). Систему уравнений Гамильтона (21.28) можно переписать так: dx dt = JH, (21.30) где строка H ( H H H H ), матрица J ( 0 E ). Матрица J q 1 q p 1 p E 0 обладает свойством J = J 1 = J. Кроме того, J 2 = E 2, а det J = 1. Перейдём в фазовом пространстве q, p к новым переменным: Q = Q ( q, p, t), P = P ( q, p, t), i = 1, 2,, n. (21.31) Соотношения (23.3) тоже можно записать в векторной форме. Введём обозначение Q y ( ). Тогда замена переменных имеет вид P y = y( x, t). (21.32)
8 8 Будем считать что замена переменных обратима. Составим матрицу Q M = y x = q P q Q 1 Q 1 Q 1 Q 1 q 1 q p 1 p Q Q p Q Q Q P = q 1 q p 1 p P 1 p P 1 P 1 P. (21.33) 1 q 1 q p 1 p P P P P q 1 q p 1 p Тогда обратимость замены переменных эквивалентна равенству det M 0. Обратное преобразование будет иметь вид x = x( y, t). (21.34) При этом матрица обратной замены x y будет равна M 1. Необходимо найти, как будет выглядеть преобразованная система уравнений. Эти уравнения могут иметь гамильтонову форму, но могут и не иметь. Затем нужно научиться находить такие замены переменных, чтобы уравнения становились проще. Эти две задачи будут рассматриваться на следующей лекции.
docplayer.ru
Скобка Пуассона — это… Что такое Скобка Пуассона?
В классической механике ско́бки Пуассо́на[1] (также возможно ско́бка Пуассо́на[2] и скобки Ли) — это оператор, играющий центральную роль в определении эволюции во времени динамической системы. Эта операция названа в честь С.-Д. Пуассона.
Скобки Пуассона векторных полей
Пусть и — векторные поля на , — оператор производной Ли по направлению векторного поля . Коммутатор операторов и есть дифференциальный оператор первого порядка, поэтому существует такое векторное поле , для которого[3][Notes 1]
Это векторное поле называется коммутатором, скобками Ли или скобками Пуассона двух векторных полей. Явное выражение для скобок Ли полей:
В голономном базисе оно принимает вид
Свойства
Скобки Пуассона функций
Пусть — симплектическое многообразие. Симплектическая структура на позволяет ввести на множестве функций на операцию скобок Пуассона, обозначаемую или и задаваемую по правилу[1][Notes 2]
где (также ) — векторное поле, соответствующее функции Гамильтона . Оно определяется через дифференциал функции и изоморфизм между 1-формами и векторами, задаваемый (невырожденной) формой . Именно, для любого векторного поля
Алгебра Ли функций Гамильтона
В силу кососимметричности и билинейности , скобка Пуассона также будет кососимметричной и билинейной:
Выражение
является линейной функцией вторых производных каждой из функций . Однако,
Это выражение не содержит вторых производных . Аналогично, оно не содержит вторых производных и , а потому
то есть скобки Пуассона удовлетворяют тождеству Якоби. Таким образом, скобки Пуассона позволяют ввести на множестве функций на структуру алгебры Ли. Из тождества Якоби следует, что для любой функции
,
то есть
— операция построения гамильтонова векторного поля по функции задаёт гомоморфизм алгебры Ли функций в алгебру Ли векторных полей.
Свойства
Скобки Пуассона невырождены:
Примечания
↑ Некоторые авторы [Арнольд] используют определение с противоположным знаком, при этом также изменяется знак в определении скобок Пуассона функций (см. ниже). Этот подход продиктован, по-видимому, стремлением сохранить как естественные геометрические определения гамильтоновых полей и их свойств, так и традиционную форму записи скобок Пуассона в координатах. Однако, при этом разрушается естественная симметрия между коммутаторами производных Ли, векторов и функций. Дальнейшие проблемы возникают при переходе к общим понятиям дифференциальной геометрии (формы, векторнозначные формы, различные дифференцирования), где отсутствие указанной симметрии неоправданно усложняет формулы. Поэтому в данной статье будут использованы другие определения, с оговорками.
↑ В некоторых книгах [Арнольд] принято определение с противоположным знаком, а именно При этом также определяется с противоположным знаком коммутатор векторных полей (см. выше), а выражение для скобки Пуассона в координатах принимает традиционный вид, однако появляется лишний минус в выражении и формуле для коммутатора полей.
↑ В [Арнольд], [Гантмахер] выражение имеет противоположный знак (аналогично вышеуказанным замечаниям). Традиционно выражение записывают как в [Гантмахер].
Литература
↑ 12Гантмахер Ф. Р. Лекции по аналитической механике: Учебное пособие для вузов / Под ред. Е. С. Пятницкого. — 3-е изд. — М.: ФИЗМАТЛИТ, 2005. — 264 с. — ISBN 5-9221-0067-X.
↑Арнольд В. И. Математические методы классической механики. — 5-е изд., стереотипное. — М.: Едиториал УРСС, 2003. — 416 с. — 1500 экз. — ISBN 5-354-00341-5
↑Ivan Kolář, Peter W. Michor, Jan Slovák Natural operations in differential geometry, — Springer-Verlag, Berlin, Heidelberg, 1993. — ISBN 3-540-56235-4, ISBN 0-387-56235-4.
dic.academic.ru
Скобки Пуассона фундаментальные — Энциклопедия по машиностроению XXL
Величины (8.5) называются фундаментальными, или основными, скобками Пуассона.
[c.107]
ФУНДАМЕНТАЛЬНЫЕ СКОБКИ ПУАССОНА
[c.135]
Они представляют другую запись необходимых и достаточных условий каноничности преобразования (3). Фундаментальные скобки Пуассона (5.7) также являются инвариантами канонического преобразования. Более общий характер имеет следующее предложение функции и, V рассматриваются сначала как зависящие от старых переменных, потом — от новых, связанных со старыми каноническим преобразованием. Тогда
[c.520]
С помощью скобок Пуассона можно записать ряд соотношений, имеющих важные аналогии в квантовой механике. Например, фундаментальные скобки Пуассона, т. е. скобки от самих канонических переменных
[c.396]
Фундаментальные скобки Пуассона координат йр и импульсов ia
[c.384]
Учитывая значения фундаментальной скобки Пуассона (СП)
[c.509]
Учитывая значения фундаментальной скобки Пуассона [x , р» = получим систему
[c.513]
Важнейшую роль играют фундаментальные скобки Пуассона
[c.254]
Фундаментальные скобки Пуассона
[c.298]
Величины (34.14) называют фундаментальными или основными скобками Пуассона. Их важное значение состоит в том, что они являются классическими аналогами квантовомеханических перестановочных соотношений для операторов координаты и импульса микрочастицы, а то обстоятельство, что для пары величин и скобки Пуассона оказываются равными единице, следует рассматривать как определение канонической сопряженности указанных величин. Любые две величины и р — будем называть канонически сопряженными, если они удовлетворяют условиям
[c.196]
Установим соотношения в скобках Пуассона между фундаментальными динамическими величинами
[c.188]
Мы уже имели случай отмечать, что СП-соотношения между сохраняющимися величинами характеризуют ту группу преобразований, из-за инвариантности действия относительно которых эти сохраняющиеся величины возникают, а не механическую систему, для которой они конкретно находятся. Поэтому найденные выше соотношения в скобках Пуассона (26) между десятью фундаментальными динамическими величинами должны выполняться для любой системы, инвариантной относительно преобразований полной группы Лоренца. Это есть условия релятивистской инвариантности теории, записанной в гамильтоновой форме.
[c.189]
В классической механике зависимость любой (не зависящей явно от времени) динамической переменной от времени описывалась скобкой Пуассона с фундаментальной для данной динамической системы динамической величиной — функцией Гамильтона
[c.458]
Скобки Пуассона, взятые для самих канонических переменных (т. е. [ = Як, 2 = рк), называются фундаментальными скобками Пуассона. Они таковы
[c.206]
Фундаментальные скобки Пуассона имеют квантово-механичес-кий аналог — перестановочные соотношения Гейзенберга, играющие важную роль в квантовой механике. В аппарате этой науки формализм Гамильтона играет существенную роль.
[c.206]
Необходимые и достаточные условия каноничности преобразования можно выразить через скобки Пуассона (см. 3). С этой целью частные производные, входящие в фундаментальные скобки Лагранжа, заменим по формулам (5.114) —(5.117)
[c.316]
Равенства (8.47) дают нам значения фундаментальных скобок Пуассона [аналогично равенствам (8.41) для скобок Лагранжа]. Эти равенства было бы проще доказывать с помощью непосредственного вычисления, подобно тому как это делалось для скобок Лагранжа. Но весь смысл приведенного доказательства состоит в том, что вычисление фундаментальных скобок Пуассона получается здесь без ссылок на какую-либо частную систему канонических переменных. В этом состоит преимущество рассмотренного доказательства, из которого следует, что скобки (8.47) являются каноническими инвариантами.
[c.280]
Введем теперь координаты и импульсы Xk = ак, Pk = ial к = = 1, 2) с фундаментальной скобкой Пуассона [xi, pk] = Sik. Поскольку СП Si, S j] = ijkSk, то уравнение (26.31) приобретает гамильтонову форму dS/dt = [S, Н] с гамильтонианом Н = IIS [276].
[c.276]
mash-xxl.info
Скобка Пуассона • ru.knowledgr.com
В математике и классической механике, скобка Пуассона — важная операция над двоичными числами в гамильтоновой механике, играя центральную роль в уравнениях Гамильтона движения, которые управляют развитием времени гамильтоновой динамической системы. Скобка Пуассона также отличает определенный класс координационных преобразований, названных каноническими преобразованиями, который наносит на карту канонические системы координат в канонические системы координат. («Каноническая система координат» состоит из канонического положения и переменных импульса (здесь символизируемый q и p соответственно), которые удовлетворяют канонические отношения Poisson-скобки.) Набор возможных канонических преобразований всегда очень богат. Например, часто возможно выбрать сам гамильтониан H = H (q, p; t) как одна из новых канонических координат импульса.
В более общем смысле: скобка Пуассона используется, чтобы определить алгебру Пуассона, которой алгебра функций на коллекторе Пуассона — особый случай. Их все называют в честь Симеона Дени Пуассона.
Свойства
Для любых функций фазового пространства и время:
Кроме того, если функция с временной зависимостью, но постоянная по фазовому пространству, то для кого-либо.
Канонические координаты
В канонических координатах (также известный как координаты Дарбу) на фазовом пространстве, учитывая две функции и, скобка Пуассона принимает форму
:
Несколько основных свойств заканчиваются для скобок канонических координат:
,
Уравнения Гамильтона движения
У
уравнений Гамильтона движения есть эквивалентное выражение с точки зрения скобки Пуассона. Это может быть наиболее непосредственно продемонстрировано в явной координационной структуре. Предположим, что это — функция на коллекторе. Тогда от многовариантного правила цепи, у каждого есть
:
Далее, можно взять и быть решениями уравнений Гамильтона; то есть,
Таким образом развитие времени функции на коллекторе symplectic может быть дано как семья с одним параметром symplectomorphisms (т.е. канонические преобразования, сохранение области diffeomorphisms), со временем t быть параметром: гамильтоново движение — каноническое преобразование, произведенное гамильтонианом. Таким образом, скобки Пуассона сохранены в нем, так, чтобы любое время t в решении уравнений Гамильтона, могло служить координатами скобки. Скобки Пуассона — канонические инварианты.
Пропуская координаты, у каждого есть
:
Оператор в конвективной части производной, L̂ =, иногда упоминается как Liouvillian (см. теорему Лиувилля (гамильтониан)).
Константы движения
У
интегрируемой динамической системы будут константы движения в дополнение к энергии. Такие константы движения доберутся с гамильтонианом под скобкой Пуассона. Предположим, что некоторая функция f (p, q) является константой движения. Это подразумевает что, если p (t), q (t) является траекторией или решением уравнений Гамильтона движения, то у каждого есть это
:
вдоль той траектории. Тогда у каждого есть
:
где, как выше, промежуточный шаг следует, применяя уравнения движения. Это уравнение известно как уравнение Лиувилля. Содержание теоремы Лиувилля — то, что развитие времени меры (или «функция распределения» на фазовом пространстве) дано вышеупомянутым.
Если скобка Пуассона f и g исчезает ({f, g} = 0), то f и g, как говорят, находятся в запутанности. Для гамильтоновой системы, чтобы быть абсолютно интегрируемыми, все константы движения должны быть во взаимной запутанности.
Кроме того, согласно Теореме Пуассона, если два количества и константы движения, их скобка Пуассона — также. Это не всегда поставляет полезный результат, однако, так как число возможных констант движения ограничено (для системы с n степенями свободы), и таким образом, результат может быть тривиальным (константа, или функция и.)
Скобка Пуассона на языке без координат
Позвольте M быть коллектором symplectic, то есть, коллектором, оборудованным формой symplectic: ω с 2 формами, который оба закрыт (т.е. его внешний производный dω = 0) и невырожденный. Например, в лечении выше, возьмите M, чтобы быть и взять
:
Если внутренний продукт или операция по сокращению, определенная, то невырождение эквивалентно высказыванию что для каждой одной формы α есть уникальный вектор, выставляют таким образом что. Альтернативно. Тогда, если H — гладкая функция на M, гамильтонова векторная область X может быть определена, чтобы быть. Легко видеть это
:
:
Скобка Пуассона на (M, ω) является билинеарной операцией на дифференцируемых функциях, определенных; скобка Пуассона двух функций на M — самостоятельно функция на M. Скобка Пуассона антисимметрична потому что:
:.
Кроме того,
Здесь Xf обозначает, что векторная область X относилась к функции f как направленная производная и обозначает (полностью эквивалентную) производную Ли функции f.
Если α — произвольная одна форма на M, векторная область Ω производит (по крайней мере, в местном масштабе) поток, удовлетворяющий граничное условие и отличительное уравнение первого порядка
:
Желание быть symplectomorphisms (канонические преобразования) для каждого t как функция x, если и только если; когда это верно, Ω называют symplectic векторной областью. Вспоминание личности и dω Картана = 0, из этого следует, что. Поэтому Ω — symplectic векторная область, если и только если α — закрытая форма. С тех пор, из этого следует, что каждая гамильтонова векторная область X является symplectic векторной областью, и что гамильтонов поток состоит из канонических преобразований. Сверху, под гамильтоновым потоком X,
:
Это — фундаментальный результат в гамильтоновой механике, управляя развитием времени функций, определенных на фазовом пространстве. Как отмечено выше, когда {f, H} = 0, f — константа движения системы. Кроме того, в канонических координатах (с и), уравнения Гамильтона для развития времени системы немедленно следуют от этой формулы.
Это также следует из этого, скобка Пуассона — происхождение; то есть, это удовлетворяет некоммутативную версию правления продуктов Лейбница:
Скобка Пуассона глубоко связана со скобкой Ли гамильтоновых векторных областей. Поскольку производная Ли — происхождение,
:.
Таким образом, если v и w — symplectic, использование, личность Картана и факт, который является закрытой формой,
:
Из этого следует, что, так, чтобы
Таким образом скобка Пуассона на функциях соответствует скобке Ли связанных гамильтоновых векторных областей. Мы также показали, что скобка Ли двух symplectic векторных областей — гамильтонова векторная область и следовательно также symplectic. На языке абстрактной алгебры symplectic векторные области формируют подалгебру алгебры Ли гладких векторных областей на M, и гамильтоновы векторные области формируют идеал этой подалгебры. sympletic векторные области — алгебра Ли (бесконечно-размерной) группы Ли symplectomorphisms M.
Широко утверждается что личность Джакоби для скобки Пуассона,
:
следует из соответствующей идентичности для скобки Ли векторных областей, но это верно только до в местном масштабе постоянной функции. Однако, чтобы удостоверить личность Джакоби для скобки Пуассона, достаточно показать что:
:
где оператор на гладких функциях на M определен, и скобка справа — коммутатор операторов. Оператор равен оператору X. Доказательство личности Джакоби следует, потому что скобка Ли векторных областей — просто их коммутатор как дифференциальные операторы.
Алгебра гладких функций на M, вместе со скобкой Пуассона формирует алгебру Пуассона, потому что это — алгебра Ли под скобкой Пуассона, которая дополнительно удовлетворяет правление Лейбница. Мы показали, что каждый коллектор symplectic — коллектор Пуассона, который является коллектором с оператором «курчавой скобки» на гладких функциях, таким образом, что гладкие функции формируют алгебру Пуассона. Однако не каждый коллектор Пуассона возникает таким образом, потому что коллекторы Пуассона допускают вырождение, которое не может возникнуть в symplectic случае.
Результат на сопряженных импульсах
Приглаженная векторная область X на пространстве конфигурации, позвольте P быть своим сопряженным импульсом. Сопряженное отображение импульса — антигомоморфизм алгебры Ли от скобки Пуассона до скобки Ли:
:
Этот важный результат стоит короткого доказательства. Напишите векторную область X в пункте q в космосе конфигурации как
:
где местной координационной структуры. У сопряженного импульса к X есть выражение
:
где p — функции импульса, сопряженные к координатам. Каждый тогда имеет, для пункта (q, p) в фазовом пространстве,
Вышеупомянутое держится для всех (q, p), давая желаемый результат.
Квантизация
Скобки Пуассона искажают к скобкам Moyal на квантизацию, то есть, они делают вывод к различной алгебре Ли, алгебре Moyal, или, эквивалентно в Гильбертовом пространстве, квантовых коммутаторах. Сокращение группы Wigner-İnönü их (классический предел, ħ→0) приводит к вышеупомянутой алгебре Ли.
См. также
Алгебра Пуассона
Фазовое пространство
Скобка Лагранжа
Супералгебра Пуассона
Суперскобка Пуассона
Скобка Дирака
Karasëv, M. V.; Маслов, V. P.: Нелинейные скобки Пуассона. Геометрия и квантизация. Переведенный с русского А. Соссинским [A. B. Sosinskiĭ] и М. Шишкова. Переводы Математических Монографий, 119. Американское Математическое Общество, провидение, Род-Айленд, 1993.
Внешние ссылки
Примечания
ru.knowledgr.com
Фазовое пространство, скобки Пуассона.
Для наглядного геометрического изображения решений канонических уравнений (7.6) вводится понятие фазового пространства. Фазовое пространство — это абстрактное пространство 2s измерений, на координатных осях которого откладываются обобщенные координаты и обобщенные импульсы. Система координат в фазовом пространстве считается декартовой системой координат. Решение канонических уравнений дает 2s функций В каждый момент времени эти функции определяют в фазовом пространстве одну точку. Эта точка называется изображающей точкой, и полностью определяет состояние механической системы. С течением времени значения функций
изменяются и изображающая точка перемещается по фазовому пространству, описывая кривую, которая называется фазовой траекторией. Движение механической системы с любым конечным числом степеней свободы всегда изображается в фазовом пространстве как траектория изображающей точки. От размерности механической системы зависит только размерность фазового пространства.
Канонические уравнения — это система обыкновенных дифференциальных уравнений первого порядка. Поэтому начальные данные для нее задаются только на сами неизвестные функции. Задание и некоторый момент времени t0 начальных данных
означает задание точки в фазовом пространстве. Поскольку начальные данные полностью определяют частное решение канонических уравнений, то из каждой точки фазового пространства выходит только одна фазовая траектория. Поэтому фазовые траектории не пересекаются.
В статистической физике вводится понятие статист.ического ансамбля. Статистический ансамбль — это множество идентичных механических систем, для которых заданы различные начальные данные. В фазовом пространстве статистический ансамбль изобрази гея множеством точек, которые можно рассматривать как частицы сплошной среды, называемой фазовой жидкостью. Если в начальный момент времени в фазовой жидкости выделить некоторый объем, го при движении каждой частицы фазовой жидкости по своей фазовой траектории этот объем будет перемещаться и деформироваться. Однако вследствие выполнения канонических уравнений величина этого объема не меняется при его перемещении, то есть фазовая жидкость является несжимаемой жидкостью. Это утверждение носит название теоремы Лиувилля. Теорема Лиувилля применяется для обоснования функции распределения в статистической физике.
Рассмотрим произвольную функцию координат импульсов и времени и найдем от нее полную производную по вре-
мени. Так как координаты и импульсы зависят от времени, то производную считаем как производную от сложной функции. В результате получим
(7.15)
Производные от координат и импульсов по времени с помощью канонических уравнений (7.6) заменим на производные от функции Гамильтона, Тогда выражение (7.15) приводится к виду
(7.16)
Определим новую величину, называемую скобкой Пуассона функций H и f, согласно формуле
(7.17)
Тогда полная производная от функции запишется в виде
(7.18)
Формула (7.18) дает производную по времени от любой функции координат, импульсов и времени. Если в качестве таких функций возьмем обобщенные координаты qi, то получим первую группу канонических уравнений:
(7.19)
Точно так же при подстановке в скобку Пуассона (7.17) вместо функции f обобщенных импульсов pi из (7.18) получается вторая группа канонических уравнений. Таким образом, формула (7.18) включает в себя и канонические уравнения. При построении квантовой механики Гейзенберг использовал обобщение формулы (7.18) для получения производной по времени для операторов, описывающих физические величины в квантовой механике.
Если некоторая функция координат и импульсов не зависит явно от времени и ее скобка Пуассона с функцией Гамильтона Н равна нулю, то эта функция остается постоянной при движении механической системы, и, следовательно, имеется закон сохранения. Например, скобка Пуассона функции Гамильтона с функцией Гамильтона тождественно равна нулю. Поэтому если функция Гамильтона не зависит явно от времени, то она остается постоянной. Поскольку функция Гамильтона равна энергии механической системы, то это означает, что выполняется закон сохранения механической энергии.
infopedia.su
Скобка — пуассон — Большая Энциклопедия Нефти и Газа, статья, страница 1
Скобка — пуассон
Cтраница 1
Скобки Пуассона обладают следующими свойствами, легко вы: водимыми из определения.
[1]
Скобки Пуассона не облегчают существенным образом решения уравнений движения системы, но, как будет видно, оказываются полезными при рассмотрении интегралов движения. Они приводят к математическому аппарату, который при некоторой несложной интерпретации является удобным путем для введения правил квантования в гейзенберговской формулировке квантовой механики.
[2]
Скобки Пуассона играют важную роль как в классической механике, так и в квантовой механике.
[3]
Скобки Пуассона инвариантны относительно упивалептных канонических нреоб-ра зоваиий.
[4]
Скобка Пуассона играет роль в изучении интегралов гамильтоновых потоков.
[5]
Скобка Пуассона имеет простую интерпретацию.
[6]
Скобка Пуассона на пространстве G задается следующей формулой.
[7]
Скобки Пуассона называются согласованными, если их линейная комбинация также является скобкой Пуассона, т.е. удовлетворяет тождеству Якоби. Хорошо известно, что на фазовом пространстве динамических систем, интегрируемых методом обратной задачи, часто удается определить согласованные скобки Пуассона, причем интегралы движения находятся в инволюции относительно всех этих скобок.
[8]
Скобка Пуассона от двух интегралов уравнений движения сама является интегралом уравнений движения.
[9]
Скобки Пуассона обладают следующими свойствами, легко выводимыми из определения.
[10]
Скобки Пуассона инвариантны относительно канонического преобразования Ф в том смысле, что преобразованные к новой системе они просто переходят в скобки Пуассона преобразованных функций. Наоборот, если Ф — диффеоморфизм пространства Т ( М), удовлетворяющий этому соотношению при всех F, G С ( Т ( М)), то Ф — каноническое преобразование.
[11]
Скобки Пуассона от любых двух величин ру, pz, px Pt равны нулю, поэтому вместе с Н имеем четыре необходимые для интегрируемости постоянные движения.
[12]
Скобки Пуассона для компонент спинов, относящиеся к разным узлам решетки, равны нулю.
[13]
Скобка Пуассона называется совместимой с динамикой SQ, если все их высшие аналоги, ограниченные на ко-нечнозонные семейства, гамильтоновы в этой скобке.
[14]
Скобка Пуассона инвариантна относительно симп-лектического диффеоморфизма.
[15]
А сколько будет 2 умножить на минус 2 и прибавить 5=?
Ха-Ха! Трудно наверное посчитать на калькуляторе? Даю наводку на Бейсике:
Запусти Basic
Введи программу и считай ( работает для любых чисел)
1input a,b
2 c=a*b
3c=c+5
4 print c
Успехов! Не получится, напишу в на другом языке
Про калькулятор — сильно! Не сможет ввести по-любому!
touch.otvet.mail.ru
Сколько будет два умножить на минус одну вторую?
Минус единица
единица в минусе
-1<img src=»//content.foto.my.mail.ru/inbox/irina-anat/_animated/i-655.gif» >
Писец! даю подсказку: минус на плюс дает минус; у тебя два яблока, я возьму половину, сколько останется у тебя?
Милая МаринПаллна! В вашей школе, приказом директора, с 1 апреля все примеры имеют ответ минус единица! Если не верите, то вот примеры:
2-3=-1
7*(-1/7)=-1
2:(-2)=-1
-4+3=-1
Так что ваш 2*(-1/2)=-1 тоже!
touch.otvet.mail.ru
Сколько будет минус умножить на минус столбиком!
минус на минус даёт плюс, если вы об этом
Плюсик! Даже в столбик.
помойму получится вот это<img src=»//content.foto.my.mail.ru/mail/mcley-_-85/_answers/i-451.jpg» >
жирный плюс))) ) из жирных столбиков
по-моему это из раннего репертуара Примадонны
даром преподаватели время со мною тратили
все что не задавали мне делал я кое-как
всем известно что:
— и + даёт минус
+ и — тоже дает минус
— и — дает плюс
+ и + дает тоже плюс
Как решить систему с тремя неизвестными 🚩 вся правда о мужчинах книга 🚩 Математика
Автор КакПросто!
Линейная система с тремя неизвестными имеет несколько способов решения. Найти решение системы можно с помощью правила Кремера через определители, методом Гаусса или используя простой способ подстановки. Метод подстановки является основным для решения систем линейных уравнений небольшого порядка. Он заключается в поочередном выражении из каждого уравнения системы одной неизвестной переменной, подстановки ее в следующее уравнение и упрощение получаемых выражений.
Статьи по теме:
Инструкция
Запишите исходную систему уравнений третьего порядка. Из первого уравнения системы выразите первую неизвестную переменную х. Для этого перенесите члены, содержащие другие переменные за знак равенства. Перенесенным членам поменяйте знак на противоположный. Если при множителе с выражаемой переменной присутствует коэффициент отличный от единицы, поделите на его значение все уравнение. Таким образом, вы получите переменную х, выраженную через остальные члены уравнения.
Подставьте во второе уравнение вместо х то выражение, которое вы получили из первого уравнения. Упростите полученную запись, произведя сложение или вычитание подобных членов. Аналогично предыдущему шагу выразите из второго уравнения следующую неизвестную переменную у. Также перенесите все другие члены за знак равенства и поделите все уравнение на коэффициент при у.
В последнее третье уравнение подставьте вместо двух неизвестных переменных х и у выраженные значения из первого и второго уравнений системы. Причем в выражении х также замените переменную у. Упростите полученное уравнение. В нем в качестве неизвестной величины останется лишь третья переменная z. Выразите ее из уравнения, как описано выше, и высчитайте ее значение.
В выражение у из второго уравнения подставьте известное значение переменной z. Подсчитайте значение переменной у. Далее в выражение переменной х подставьте значения переменных у и z. Вычислите х. Запишите полученные значения х, у и z – это и есть решение системы с тремя неизвестными.
Система из трех уравнений с тремя неизвестными может и не иметь решений, несмотря на достаточное количество уравнений. Можно пытаться решить ее с помощью метода подстановки или с помощью метода Крамера. Метод Крамера помимо решения системы позволяет оценить, является ли система разрешимой, до того, как отыскать значения неизвестных.
Инструкция
Метод подстановки заключается в последовательном выражении одной неизвестной через две других и подстановке полученного результата в уравнения системы. Пусть дана система из трех уравнений в общем виде:
a1x + b1y + c1z = d1
a2x + b2y + c2z = d2
a3x + b3y + c3z = d3
Выразите из первого уравнения x: x = (d1 — b1y — c1z)/a1 — и подставьте во второе и третье уравнения, затем из второго уравнения выразите y и подставьте в третье. Вы получите линейное выражение для z через коэффициенты уравнений системы. Теперь идите «обратно»: подставьте z во второе уравнение и найдите y, а затем z и y подставьте в первое и найдите x. Процесс в общем виде отображен на рисунке до нахождения z. Дальше запись в общем виде будет слишком громоздкой, на практике, подставив числа, вы довольно легко найдете все три неизвестные.
Метод Крамера заключается в составлении матрицы системы и вычислении определителя этой матрицы, а также еще трех вспомогательных матриц. Матрица системы составляется из коэффициентов при неизвестных членах уравнений. Столбец, содержащий числа, стоящие в правых частях уравнений, называется столбцом правых частей. В матрице системы он не используется, но используется при решении системы. Пусть, как и раньше, дана система из трех уравнений в общем виде:
a1x + b1y + c1z = d1
a2x + b2y + c2z = d2
a3x + b3y + c3z = d3
Тогда матрицей этой системы уравнений будет следующая матрица:
| a1 b1 c1 |
| a2 b2 c2 |
| a3 b3 c3 |
Прежде всего найдите определитель матрицы системы. Формула нахождения определителя: |A| = a1b2c3 + a3b1c2 + a2b3c1 — a3b2c1 — a2b1c3 — a1b3с2. Если он не равен нулю, то система разрешима и имеет единственное решение. Теперь нужно найти определители еще трех матриц, которые получаются из матрицы системы путем подставления столбца правых частей вместо первого столбца (эту матрицу обозначим Ax), вместо второго (Ay) и третьего (Az). Вычислите их определители. Тогда x = |Ax|/|A|, y = |Ay|/|A|, z = |Az|/|A|.
Источники:
Системы трёх линейных уравнений с тремя неизвестными
Уравнением называют аналитическую запись задачи о разыскании значений аргументов, при которых значения двух данных функций равны. Система – это совокупность уравнений, для которых требуется найти значения неизвестных, удовлетворяющих одновременно всем этим уравнениям. Так как успешное решение задачи невозможно без правильно составленной системы уравнений, необходимо знать основные принципы составления подобных систем.
Инструкция
Во-первых, определите неизвестные величины, которые требуется найти в данной задаче. Обозначьте их через переменные. Наиболее распространенные переменные, используемые при решении систем уравнений, это x, y и z. В отдельных задачах удобнее применять общепринятые обозначения, например, V для обозначения объема, или a для обозначения ускорения. Пример. Пусть гипотенуза прямоугольного треугольника равна 5 м. Необходимо определить катеты, если известно, что после того, как один из них увеличить в 3 раза, а другой в 4, то сумма их длин составит 29 м. Для данной задачи необходимо обозначить длины катетов через переменные x и y.
Далее внимательно читайте условие задачи и связывайте неизвестные величины уравнениями. Иногда взаимосвязь между переменными будет очевидна. Например, в приведенном выше примере, катеты связывает следующее соотношение.Если «один из них увеличить в 3 раза» (3 * x), «а другой в 4» (4 * y), «то сумма их длин составит 29 м»: 3 * x + 4 * y = 29.
Другое уравнение для данной задачи менее очевидно. Оно кроется в условии задаче о том, что дан прямоугольный треугольник. Значит, можно применить теорему Пифагора. Т.е. x^2 + y^2 = 25. Итого получается два уравнения: 3 * x + 4 * y = 29 и x^2 + y^2 = 25.Для того чтобы система имела однозначное решение, количество уравнений должно быть равно количеству неизвестных. В приведенном примере имеется две переменных и два уравнения. Значит, система имеет одно конкретное решение: x = 3 м, y = 4 м.
При решении физических задач «неочевидные» уравнения могут заключаться в формулах, связывающих физические величины. Например, пусть в условии задачи необходимо найти скорости пешеходов Va и Vb. Известно, что пешеход A проходит расстояние S на 3 часа медленнее, чем пешеход B. Тогда можно составить уравнение, воспользовавшись формулой S = V * t, где S – это расстояние, V – скорость, t – время: S / Va = S / Vb + 3. Здесь S / Va — это время, за которое пройдет заданное расстояние пешеход A. S / Vb — время, за которое пройдет заданное расстояние пешеход B. По условию это время на 3 часа меньше.
Видео по теме
Обратите внимание
Все уравнения в системе должны поставлять дополнительную независимую от других уравнений информацию. Иначе система будет недоопределена и однозначного решения найти будет не возможно.
Полезный совет
После решения системы уравнений подставьте найденные значения в исходную систему и проверьте, что они удовлетворяют всем уравнениям.
Само по себе уравнение с тремя неизвестными имеет множество решений, поэтому чаще всего оно дополняется еще двумя уравнениями или условиями. В зависимости от того, каковы исходные данные, во многом будет зависеть ход решения.
Вам понадобится
— система из трех уравнений с тремя неизвестными.
Инструкция
Если два из трех уравнений системы имеют лишь две неизвестные из трех, попытайтесь выразить одни переменные через другие и подставить их в уравнение с тремя неизвестными. Ваша цель при этом – превратить его в обычное уравнение с одной неизвестной. Если это удалось, дальнейшее решение довольно просто – подставьте найденное значение в другие уравнения и найдите все остальные неизвестные. Некоторые системы уравнений можно решить вычитанием из одного уравнения другого. Посмотрите, нет ли возможности умножить одно из выражений на число или переменную так, чтобы при вычитании сократились сразу две неизвестные. Если такая возможность есть, воспользуйтесь ею, скорее всего, последующее решение не составит труда. Не забывайте, что при умножении на число необходимо умножать как левую часть, так и правую. Точно также, при вычитании уравнений необходимо помнить о том, что правая часть должна также вычитаться.
Если предыдущие способы не помогли, воспользуйтесь общим способом решений любых уравнений с тремя неизвестными. Для этого перепишите уравнения в виде а11х1+a12х2+а13х3=b1, а21х1+а22х2+а23х3=b2, а31х1+а32х2+а33х3=b3. Теперь составьте матрицу коэффициентов при х (А), матрицу неизвестных (Х) и матрицу свободных членов (В). Обратите внимание, умножая матрицу коэффициентов на матрицу неизвестных, вы получите матрицу, равную матрице свободных членов, то есть А*Х=В.
Найдите матрицу А в степени (-1) предварительно отыскав определитель матрицы, обратите внимание, он не должен быть равен нулю. После этого умножьте полученную матрицу на матрицу В, в результате вы получите искомую матрицу Х, с указанием всех значений.
Найти решение системы из трех уравнений можно также с помощью метода Крамера. Для этого найдите определитель третьего порядка ∆, соответствующий матрице системы. Затем последовательно найдите еще три определителя ∆1, ∆2 и ∆3, подставляя вместо значений соответствующих столбцов значения свободных членов. Теперь найдите х: х1=∆1/∆, х2=∆2/∆, х3=∆3/∆.
Источники:
решений уравнений с тремя неизвестными
www.kakprosto.ru
4.4 Система m уравнений с n неизвестными
Случай, когда число
уравнений mбольше
числа переменныхn,
путем последовательного исключения
неизвестных из уравнений приводится к
случаюm=nилиmn.
Первый случай рассмотрен ранее.
Во втором случае,
когда число уравнений меньше числа
неизвестных mnи уравнения независимы, выделяютсяmосновных переменныхи (n—m)неосновных переменных. Основными
являются переменные удовлетворяющие
условию: определитель, составленный из
коэффициентов при этих переменных, не
равен нулю. Основными могут быть различные
группы переменных. Общее количество
таких группNравно
числу сочетаний изnэлементов поm:
.
Если система имеет
хотя бы одну группу основных переменных,
то эта система является неопределенной,
то есть имеет множество решений.
Если система не
имеет ни одной группы основных переменных,
то система является несовместной,
то есть не имеет ни одного решения.
В том случае, когда
система имеет множество решений, среди
них выделяют базисное решение.
Базисным
решениемназывают такое решение,
в котором неосновные переменные равны
нулю. У системы имеется не более чембазисных решений.
Решения системы
делятся на допустимыеинедопустимые.
Допустимыминазывают такие решения, у которых
значения всех переменных неотрицательны.
Если хотя бы одно
значение переменной отрицательно, то
решение называют недопустимым.
Пример 4.5
Найти базисные
решения системы уравнений
Найдем число
базисных решений
.
Итак, среди множества
решений системы есть не более трех
базисных. Выделим две основные переменные
среди трех. Предположим, что это х1их2. Проверим определитель
из коэффициентов при них
.
Так как этот
определитель не равен нулю, то переменные х1,х2являются
основными.
Теперь положим,
что х3=0. Тогда получим систему
в виде
Решим ее по формулам
Крамера:
,
.
Итак, первое
базисное решение имеет вид
х1=1,х2=0,х3=0 .
Проверим теперь
на принадлежность к основным переменные х1их3.
.
Получим, что х1их3— вторая группа основных
переменных. Положимх2=0 и решим
систему
,
.
Второе базисное
решение имеет вид
х1=1,х2=0,х3=0.
Теперь проверим
на принадлежность к основным переменные х2их3.
то есть переменные х2их3неосновные.
Итак, всего у данной системы оказалось
два базисных решения. Оба эти решения
допустимые.
Условие совместности
системы mлинейных уравненийcnпеременными
дается с помощью понятия ранг матрицы.
Ранг матрицы– это число равное наибольшему порядку
минора отличного от нуля.
Для матрицы А
миноромk-ого
порядкаслужит определитель,
составленный из элементов любыхkстрок иkстолбцов.
Например,
Пример
2
Найти ранг матрицы
Вычислим определитель
матрицы
Для этого первую
строку умножим на (-4) и сложим со второй
строкой, затем первую строку умножим
на (-7) и сложим с третей строкой, в
результате получим определитель
Т.к. строки
полученного определителя пропорциональны,
то
.
Отсюда видно, что
минор 3-его порядка равен 0, а минор 2-ого
порядка не равен 0.
Следовательно
ранг матрицы r=2.
Расширенная
матрицасистемы имеет вид
Теорема Кронекера
— Капелли
Для того, чтобы
линейная система была совместной
необходимо и достаточно, чтобы ранг
расширенной матрицы был равен рангу
основной матрицы
.
Если ,то система несовместна.
Для совместной
системы линейных уравнений возможны
три случая:
1)Если
,
то система ЛУ имеет (m-r)
линейно зависимых уравнений, их можно
исключить из системы;
2) Если
,
то система ЛУ имеет единственное решение;
3) Если
,
то система ЛУ имеет множество решений
studfiles.net
ГЛАВА 4. РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Система линейных уравнений
Системой m линейных уравнений с n неизвестными называется система m алгебраических уравнений первой степени вида
(4.1.1)
где — неизвестные, подлежащие определению;
— числа, называемые коэффициентами при неизвестных;
— числа, называемые свободными членами.
Решением системы уравнений (4.1.1) называется совокупность n чисел таких, что если в каждое уравнение системы вместо неизвестных подставить эти числа ( вместо , вместо вместо ), то все уравнения обратятся в тождества.
Если система линейных уравнений (4.1.1) имеет хотя бы одно решение, то она называется совместной. В противном случае система называется несовместной.
Совместная система, имеющая единственное решение, называется определенной, а система, имеющая более одного решения – неопределенной.
Две системы линейных уравнений называются эквивалентными, если любое решение каждой из них является одновременно решением и другой системы.
Две произвольные несовместные системы считаются эквивалентными.
Системе линейных уравнений (4.1.1) поставим в соответствие матрицу и расширенную матрицу
,
полученную присоединением к матрице А столбца свободных членов.
Методы решения системы n линейных уравнений с n неизвестными
Рассмотрим систему n линейных уравнений с n неизвестными
(4.2.1)
Определитель |A| матрицы А называется определителем системы (4.2.1).
Теорема Крамера. Если определитель |A| системы (4.2.1) отличен от нуля, то система совместна и имеет единственное решение.
Доказательство. Пусть система (4.2.1) совместна и — одно из ее решений. Тогда получим n тождеств:
(4.2.2)
Умножим обе части первого из равенств (4.2.2) на алгебраическое дополнение , обе части второго равенства умножим на алгебраическое дополнение и т.д. и обе части n-ого равенства – на . Складывая левые и правые части полученных выражений, придем к следующему равенству:
(4.2.3)
Коэффициент при равен определителю |A| системы (4.2.1), коэффициент при равен нулю, а правая часть равенства (4.2.3) является определителем, полученным из определителя |A| путем замены j-го столбца столбцом свободных членов.
Обозначим данный определитель через
Тогда равенство (4.2.3) примет вид: , откуда
(4.2.4)
Из формулы (4.2.4) следует, что если система (4.2.1) совместна, то она обладает единственным решением.
Формулы (4.2.4) называются формулами Крамера.
Непосредственной подстановкой значений , во все уравнения системы убедимся в том, что они образуют ее решение:
.
При , при , .
Таким образом, получим
.
Теорема доказана.
Пример. Решить систему линейных уравнений методом Крамера:
Решение. Вычислим определитель :
,
,
,
откуда
Решение системы линейных уравнений с определителем |A|, отличным от нуля, можно найти с помощью обратной матрицы. Для этого запишем систему (4.2.1) в виде матричного уравнения
где .
Решение матричного уравнения (4.2.5) имеет вид
(4.2.6)
Пример. Решить систему линейных уравнений с помощью обратной матрицы
Решение. Вычислим для матрицы
ее обратную матрицу
.
Определим неизвестную матрицу-столбец Х:
,
откуда
Формулы Крамера (4.2.4) могут быть получены из выражения (4.2.6). Действительно, запишем матричное равенство в развернутом виде:
.
Из полученного выражения непосредственно следуют формулы Крамера:
.
Теорема Кронекера-Капелли
Теорема. Система линейных уравнений (4.1.1) совместна тогда и только тогда, когда .
Доказательство.
Необходимость. Пусть система (4.1.1) совместна и пусть числа — одно из ее решений. Подставляя эти числа вместо неизвестных в систему (4.1.1), получим m тождеств, которые показывают, что последний столбец матрицы является линейной комбинацией всех остальных столбцов, взятых соответственно с коэффициентами . Всякий другой столбец матрицы входит и в матрицу А. Поэтому максимальное число линейно независимых столбцов матриц А и совпадает. Следовательно, .
Достаточность. Пусть дано, что . Отсюда следует, что максимальное число линейно независимых столбцов матриц А и совпадает и равно r. Для определенности предположим, что первые r столбцов матриц А и линейно независимы, а остальные (n-r) столбцов является их линейными комбинациями. Выражая последний столбец матрицы А как линейную комбинацию первых r столбцов, получим:
откуда следует, что числа являются решением системы (4.1.1), т.е. система (4.1.1) совместна. Теорема доказана.
На основании теоремы Кронекера-Капелли имеем:
1. Если , то система (4.1.1) несовместна;
2. Если , то система (4.1.1) совместна.
Пусть для определенности базисный минор порядка r расположен в верхнем левом углу матрицы А. Тогда первые r строк матрицы А линейно независимы, а остальные ее строки являются линейной комбинацией первых r строк. Но это означает, что первые r уравнений системы (4.1.1) линейно независимы, а остальные (m-r) ее уравнений являются их линейными комбинациями. Поэтому достаточно решить систему r уравнений; решения такой системы будут, очевидно, удовлетворять и остальным (m-r) уравнениям.
При этом возможны два случая:
1. . Тогда систему, состоящую из первых r уравнений системы (4.1.1)
можно решить, например, по правилу Крамера. В этом случае система имеет единственное решение, т.е. система совместна и определена;
2. . Рассмотрим первые r уравнений системы (4.1.1). Оставив в левых частях первые r неизвестных, перенесем остальные в правые части. Получим систему:
Очевидно, что полученная система и, следовательно, система (4.1.1) являются совместными и неопределенными.
Таким образом, если , то система (4.1.1) совместна (определенная или неопределенная), если , то система (4.1.1) несовместна.
Если в системе n линейных уравнений с n неизвестными определитель системы равен нулю, то . Тогда если , то система является совместной и неопределенной. Если , то система несовместна.
Теорема Кронекера-Капелли устанавливает необходимое и достаточное условие совместности системы (4.1.1), но не дает способа нахождения решения этой системы. Рассмотрим метод Жордана-Гаусса – метод решения системы m линейных уравнений с n неизвестными.
Метод Жордана-Гаусса
Метод Жордана-Гаусса основан на элементарных преобразованиях (п.3.2) строк расширенной матрицы
системы (4.1.1).
В результате каждого из элементарных преобразований расширенная матрица изменяется, однако системы линейных уравнений, соответствующие полученным матрицам, эквивалентны исходной системе линейных уравнений.
Пусть дана система m линейных уравнений с n неизвестными. Применяя элементарные преобразования, построим эквивалентную систему специального вида. Для этого выберем в качестве первого уравнений одно из тех уравнений системы, где коэффициент при х1 отличен от нуля. Не нарушая общности, предположим, что . Тогда первым уравнением системы будет уравнение
.
Умножим первое уравнение на . Затем умножим это же уравнение на , и прибавим его почленно к уравнениям системы с номерами i=2,3,…,m. После этого преобразования в уравнениях с номерами i>1 будет исключено неизвестное х1. Первый шаг метода Жордана-Гаусса закончен.
.
Может случиться, что на первом шаге вместе с неизвестными х1 будут исключены неизвестными , но найдется хотя бы одно уравнение, в котором сохранится неизвестное . Одно из таких уравнений примем в качестве второго уравнения системы. В этом случае расширенная матрица , соответствующая полученной системе, имеет вид:
.
Используем второе уравнение для исключения неизвестного из всех уравнений, кроме второго. После второго шага метода Жордана-Гаусса получим расширенную матрицу
.
Продолжая процесс, после r шагов получим матрицу , содержащую r единичных столбцов на месте первых n столбцов матрицы А (r – ранг матрицы А системы).
При этом возможны три случая:
1. Если , то матрица преобразуется в матрицу
Система имеет единственное решение: .
2. Если и r<n, то
Система имеет бесконечное множество решений. Общее решение имеет вид:
Неизвестные называются базисными. – свободными неизвестными.
Свободным неизвестным можно придавать какие угодно значения, получая при этом соответствующие значения неизвестных . В результате имеем бесконечное множество частных значений.
Среди частных решений системы выделим базисные решения, которые получают при равенстве нулю всех свободных неизвестных. Очевидно, что одним из базисных решений является следующее:
.
В общем случае число базисных решений не превышает .
2. Если , то
где хотя бы один из элементов отличен от нуля. В этом случае система (4.1.1) несовместна.
Таким образом, метод Жордана-Гаусса состоит из r итераций (r шагов). На каждой S-ой итерации выбирается направляющий элемент соответственно направляющие строка и столбец. С помощью элементарных преобразований столбец преобразуется в единичный с единицей в строке .
Рассмотрим алгоритм произвольной итерации метода Жордана-Гаусса. Положим .
Шаг 1. Сформировать множество .
Шаг 2. Если , то процесс элементарных преобразований закончить. В противном случае перейти к шагу 3.
Шаг 3. Если для , то процесс элементарных преобразований закончить. В противном случае найти направляющий элемент и перейти к шагу 4.
Шаг 4. Разделить направляющую строку на .
Шаг 5. К i-ой строке, , прибавим строку , умноженную на .
Покажем, что столбец преобразуется в единичный с единицей в строке . Пусть . Элементы матрицы выражаются через элементы матрицы следующим образом:
(4.4.1)
(4.4.2)
(4.4.3)
(4.4.4)
Полагая j=k, из (4.4.1) и (4.4.3) имеем
.
Пример. Решить систему линейных уравнений методом Жордана-Гаусса.
а)
Решение. Составим из данной системы расширенную матрицу
Полагаем .
Итерация 1.
Шаг 1. .
Шаг 2. , переходим к шагу 3.
Шаг 3. Находим .
Шаг 4. Делим третью строку на .
Шаг 5. К первой, второй и четвертой строкам прибавляем третью строку, соответственно умноженную на –2, -2, -3. В результате матрица преобразуется в матрицу
.
Итерация 2.
Шаг 1. .
Шаг 2. , переходим к шагу 3.
Шаг 3. Находим .
Шаг 4. Делим первую строку на .
Шаг 5. Ко второй, третьей и четвертой строкам прибавляем первую строку, соответственно умноженную на –4, -3, 1. Получим матрицу
.
Итерация 3.
Шаг 1. .
Шаг 2. , переходим к шагу 3.
Шаг 3. Находим .
Шаг 4. Делим четвертую строку на .
Шаг 5. К первой, второй, третьей строкам прибавляем четвертую строку, соответственно умноженную на 0, -5, -2. Получим матрицу
.
Итерация 4.
Шаг 1. .
Шаг 2. , переходим к шагу 3.
Шаг 3. Находим .
Шаг 4. Делим четвертую строку на .
Шаг 5. К первой, третьей и четвертой строкам прибавляем вторую строку, соответственно умноженную на -1, 2, 0. Получим матрицу
.
Итерация 5.
Шаг 1. .
Шаг 2. , поэтому процесс элементарных преобразований закончен. На основании вида матрицы получаем единственное решение исходной системы: .
б)
Решение. Составим расширенную матрицу
.
В результате итерации 1, полагая , получим матрицу
После итерации 2, полагая , получим матрицу
Итерация 3.
Шаг 1. .
Шаг 2. .
Шаг 3. Так как , то процесс элементарных преобразований закончен.
Матрица определяет общее решение системы:
— базисные, — свободные переменные.
Получим одно из базисных решений:
.
в)
Решение. Матрицы , , имеют вид:
Очевидно, что процесс элементарных преобразований следует закончить, так как . Из первой (или третьей) строки матрицы следует, что исходная система линейных уравнений несовместна. Действительно, первой строке соответствует уравнение , которое не может быть удовлетворено ни при каких значениях неизвестных .
Используя метод Жордана-Гаусса, рассмотрим еще один метод вычисления обратной матрицы .
Рассмотрим матричное уравнение
,
(4.4.5)
где , Е – единичная матрица.
Очевидно, что матричное уравнение (4.4.5) имеет единственное решение .
Решение матричного уравнения (4.4.5) сводится к решению n систем n линейных уравнений с n неизвестными вида
(4.4.6)
Системе линейных уравнений (4.4.6) соответствует расширенная матрица . Применяя к матрице алгоритм метода Жордана-Гаусса, получим матрицу . Покажем, что . Расширенной матрице соответствует матричное уравнение , которое имеет единственное решение Х=В. Матрица получена из матрицы методом Жордана-Гаусса. Поэтому системы линейных уравнений, соответствующие матрицам и , равносильны, т.е. имеют одно и то же решение. Отсюда следует, что , следовательно, .
Таким образом, чтобы для невырожденной матрицы А вычислить обратную матрицу , необходимо составить матрицу . Методом Жордана-Гаусса в матрице преобразовать матрицу А к виду единичной матрицы Е, тогда на месте единичной матрицы Е получим обратную матрицу .
Пример. Вычислить обратную матрицу для матрицы
.
Решение. Составим матрицу
.
На итерации 1, полагая , получим
.
На итерации 2, полагая , получим
.
На итерации 3, полагая , получим
,
откуда .
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
zdamsam.ru
Случаи систем уравнений с тремя неизвестными
67. Особенные случаи систем уравнений с тремя неизвестными. Возьмем следующую систему уравнений:
Наблюдательный человек здесь может подметить, что третье уравнение вовсе не является новым, а является следствием двух первых: каждый член 3-го уравнения получается от сложения соответствующих членов 1-го и 2-го уравнения (5x = 3x + 2x, 7y = 4y + 3y; 9z = 5z + 4z; 32 = 17 + 15), и само собою понятно, что если 3x + 4y + 5z должно равняться 17, 2x + 3y + 4z должно равняться 15, то (3x + 4y + 5z) + (2x + 3y + 4z) должно равняться 32.
Поэтому мы здесь имеем, в сущности, только 2 уравнения с 3 неизвестными, и они имеют бесконечно много решений.
Можно составлять такие системы и более сложным путем. Возьмем два уравнения:
x – 2y + 3z = 7 2x + y – z = 5
Умножим каждое из них на какое-либо число и сложим (или вычтем) по частям полученные уравнения. Умножим обе части 1-го уравнения, например, на 3 и обе части второго на (–2) и полученные уравнения сложим. Тогда получим уравнения:
–x – 8y + 11z = 11.
Это уравнение является следствием двух первых и поэтому все три уравнения, взятые вместе, должны иметь бесконечно много решений.
Попробуем решать эти уравнения: 1) из 1-го и 3-го сложением по частям исключим x; 2) из 2-го и 3-го, умножив предварительно третье на 2, также исключим x:
Если теперь разделить обе части 1-го из полученных уравнений на 2 и обе части 2-го на 3, то получим одно и то же уравнение, а именно:
–5y + 7z = 9.
Это обстоятельство и является признаком того, что наша система имеет бесконечно много решений.
Если мы изберем такой план: 1) из 1-го и, напр., 3-го уравнений определим x и y через z; 2) подставим полученные выражения в 3-е уравнение, то должны получить само собою очевидное равенство, вроде 0 = 0 или 7 = 7 или 15 = 15 или –11 = –11 и т. п.
В самом деле:
то после предыдущего становится ясным, что эти 3 уравнения совместно решить нельзя. В самом деле, ведь левая часть 3-го уравнения получается от сложения левых частей 1-го и 2-го уравнений, а в таком случае эта сумма должна равняться 17 + 15 или 32, но не может равняться 33.
Также точно можно, взяв 2 уравнения произвольно, составить третье, несовместимое с ними, умножением каждого из взятых двух уравнений на какое-нибудь число и сложением (или вычитанием) полученных уравнений, причем известный член должно как-либо изменить. Например, если первое из взятых уравнений умножим на 2 (получим: 6x + 8y + 10z = 34), второе на 3 (получим: 6x + 9y + 12z = 45), сложим полученные уравнения по частям, но вторую часть как-либо изменим (напр., вместо получающейся суммы 79 возьмем 100), то полученное уравнение
12x + 17y + 22z = 100
не совместимо с первыми двумя.
Если кто-либо стал бы решать систему несовместимых уравнений, то пришел к результату явно нелепому, например:
0 = 5 или 7 = 11 или –5 = +5 и т. п.
maths-public.ru
Системы линейных уравнений. Решение и исследование системы трех линейных уравнений с тремя неизвестными.
Пусть
дана система
трех линейных
уравнений с тремя неизвестными — x,
y, z :
,
ее
главный определитель, составленный из
коэффициентов при неизвестных, имеет
вид
.
Если ,
то,,,
где
, ,.
Пусть
теперь ,
но есть.
Тогда можно утверждать, что, например,
.
Если
же и
,
то в системеесть лишь два независимых уравнения, а
третье является их следствием. В силу
этого система сводится к двум уравнениям
с тремя неизвестными. Такая система
неопределенна и имеет бесчисленное
множество решений: одному можно придавать
любое значение, а остальные неизвестные
определяются из двух независимых –
все решения лежат на прямой, т.е. на
пересечении двух плоскостей. В этом
случае.
Если
же
,
то система несовместна и не имеет
решений. В этом случае среди определителей,,есть хотя бы один, не равный нулю.
Случай,
когда
,
т.е. равны нулю и все его миноры второго
порядка, но есть элементы, не равные
нулю, приводит к выражениям
и
.
Если
же и ,,
то весть лишь одно независимое уравнение.
Система неопределенна, имеет бесчисленное
множество решений (точки плоскости). В
этом случае,
и определители всех миноров второго
порядка также равны нулю.
Если
же ,
или,
то система противоречива и не имеет
решений – параллельные плоскости.
Однородная система трех линейных уравнений с тремя неизвестными.
Однородной
называют систему, в которой ,.
.
Система — неоднородна.
Если вне равен нулю, то система имеет единственное
решение.
Если
же ,
то среди его строк есть линейная
зависимость и востается два или одно независимое
уравнение.
Решение произвольных систем линейных уравнений
Пусть
задана система линейных
уравнений снеизвестными,:
, (1)
или
в матричной форме
, (2)
где
, ,.
Решением
системы (1) или (2) называется любой -компонентный
вектор-столбец или матрица-столбец,
обращающий в верное равенство системы
(1) или (2).
Система
называется совместной,
если у нее существует хотя бы одно
решение. В противном случае, система
несовместна. Две системы называют
эквивалентными, если множества их
решений совпадают.
Теорема
Кронекера–Капелли.
Чтобы система вида (1) была совместна,
необходимо и достаточно, чтобы
,
где — расширенная матрица системы.
Пусть
теперь в системе (2)
,
т.е. она совместна. Можно считать, не
ограничивая общности, что не равный
нулю минор порядкарасполагается в первыхстроках и столбцах матрицы.
Запишем
«укороченную» систему для (1), отбросив
последние уравнений, в виде:
(3)
Эта
система эквивалентна исходной, т.к.
отброшенные уравнения являются линейной
комбинацией оставшихся уравнений.
Неизвестные
называют
базисными, а- свободными. Перенесем теперь свободные
переменные в правую часть (3). В результате
получим систему относительно базисных
неизвестных:
.
Эта
система для любого набора значений
свободных неизвестных имеет единственное
решение:
,
где ,,,— набор свободных неизвестных.
Соответствующее
решение укороченной, а следовательно
и исходной системы имеет вид:
. (4)
Формула
(4) выражает произвольное решение системы
(1) в виде функций от свободных неизвестных и называетсяобщим
решением системы. Каждому конкретному набору
соответствуетчастное
решение.
studfiles.net
Системы 3-х линейных уравнений с тремя неизвестными
⇐ ПредыдущаяСтр 3 из 7Следующая ⇒
Рассмотрим систему трех линейных уравнений с тремя неизвестными
(2.4)
а11, a12, …, a33 – коэффициенты при неизвестных,
b1, b2, b3 – свободные члены.
Решить систему (2.4) – значит найти такую упорядоченную тройку чисел x1=c1, x2=c2, x3=c3, при подстановке которых в уравнения системы последние обращаются в тождества.
Система уравнений, имеющая решения (единственное или бесчисленное множество), называется совместной, система уравнений, не имеющая решений, – несовместной.
Приведем три способа решений системы (2.4).
Правило Крамера
Составим определитель системы из коэффициентов при неизвестных
(2.5)
Если , то система (2.4) имеет единственное решение, которое находится по формулам Крамера:
(2.6)
где , , получены из определителя заменой соответственно первого, второго, третьего столбца столбцом из свободных членов системы (2.4).
(2.7)
Пример 7. Решить систему
Вычисляем определитель системы (2.5) и определители , , (2.6).
следовательно, система имеет единственное решение.
По формулам Крамера (2.6) находим:
Можно сделать проверку, подставив значения неизвестных в уравнения системы.
Итак, x1=x2=x3=1 – решение системы.
Метод Гаусса
Рассмотрим систему (2.4):
Метод Гаусса, иначе метод последовательного исключения неизвестных, состоит в следующем. Пусть Исключим из 2-го и 3-го уравнений системы x1. Получим систему:
Далее исключим x2 из 3-го уравнения:
Получим систему треугольного вида. Из 3-го уравнения найдем x3, подставляя его во 2-ое уравнение, найдем x2, затем из 1-го уравнения найдем x1, подставляя в него x2 и x3.
Пример 8. Решить систему
Переставим 3-е и 1-ое уравнения, чтобы в 1-ом уравнении коэффициент при x1 был равен 1.
Исключим x1 из 2-го и 3-его уравнений. Для этого умножим 1-ое уравнение на (-4) и сложим его со 2-м уравнением; затем умножим 1-ое уравнение на (-6) и сложим с 3-м уравнением. Получим систему:
Исключим x2 из 3-его уравнения. Для этого умножим 2-ое уравнение на (-13/10) и сложим с 3-м уравнением. Получим систему:
Из последнего уравнения находим x3= -1, подставляем во 2-ое уравнение:
-10x2 — 13(-1) = -7, -10x2 = — 20, x2 = 2.
Подставляя x2 и x3 в 1-ое уравнение, получим
Итак, решение системы: x1 = 1, x2 = 2, x3 = -1.
Решение системы с помощью обратной матрицы
Дана система: (2.8)
Составим матрицу А из коэффициентов при неизвестных, матрицу-столбец Х – из неизвестных, матрицу-столбец В – из свободных членов.
,
Систему (2.8) можно записать в матричной форме так:
Матрица-решение Х находится по формуле:
(2.9)
А-1 – обратная матрица для матрицы А, она составляется из алгебраических дополнений элементов матрицы А по формуле (2.3):
– детерминант или определитель матрицы А, .
Пример 9. Решить систему:
Введем матрицы: ,
Обратная матрица вычислена в примере 6. По формуле (2.9) находим решение системы
Итак, x1=1, x2=1, x3=1.
Элементы векторной алгебры
Вектор – направленный отрезок; обозначается или . А – начало вектора, В – конец.
Длинаили модуль вектора обозначается .
Рис. 21.
В координатном пространстве 0xyz вектор может быть представлен в виде
(3.1)
Эта формула дает разложение вектора по базису векторов , , ; , , — прямоугольные декартовые координаты вектора (иначе проекции вектора на оси координат).
Формулу (3.1) можно записать так:
– вектор имеет координаты , , .
Длина (модуль) вектора находится по формуле:
. (3.2)
Если вектор задан задан координатами начала A(x1,y1,z1)и конца B(x2,y2,z2), то координаты находятся по формулам:
(3.3)
Если известны разложения векторов и по осям координат , то при сложении (вычитании) векторов их одноименные координаты складываются (вычитаются), при умножении вектора на число координаты вектора умножаются на это число, т.е.
(3.4)
Скалярным произведением векторов и , обозначается , называется число, равное произведению длин этих векторов на косинус угла между ними
. (3.5)
Если , , то
. (3.6)
Если векторы и коллинеарны (параллельны), то
. (3.7)
Если векторы и ортогональны (перпендикулярны), то
или (3.8)
Пример 10. Даны точки А1(1,0,-1), A2(2,-1,1), A3(0,1,-2). Средствами векторной алгебры, учитывая, что найти:
1) координаты векторов и .
Используем формулу (3.3):
или ;
или .
2) Координаты вектора
Используя формулы (3.4) и (3.5), получим
или
3) длину вектора
По формуле (3.2):
4) Скалярное произведение
По формуле (3.6):
5) Проверить, коллинеарны или ортогональны векторы и
Проверяем условия (3.7) и (3.8).
векторы и неколлинеарны.
векторы неортогональны.
Примеры для самостоятельного решения
1. Вычислить определители.
1.1. а) б)
1.2. По правилу треугольников:
а) б)
1.3. Разложив по элементам 1-ой строки:
1.4. Разложив по элементам строки (столбца), где больше нулей:
1. Решить системы и сделать проверку.
2.1. По формулам Крамера.
а) б)
2.2. По методу Гаусса.
а) б)
2.3. С помощью обратной матрицы
а) б)
2. Даны точки А(-3, 4, 1), В(2,3,4). Найти разложение вектора по базису векторов , , и длину вектора . Отв.:
3. Даны точки А(0,-2,3), В(2,1,4), С(3,4,5). Найти:
а) координаты (проекции) векторов и
б) координаты вектора
с) длину вектора
4. Даны векторы Найти скалярное произведение векторов .
5. Доказать, что векторы и коллинеарны.
6. Доказать, что векторы ортогональны.
Рекомендуемые страницы:
lektsia.com
Системы линейных уравнений. Решение и исследование системы трех линейных уравнений с тремя неизвестными.
Пусть
дана система трех линейных уравнений
с тремя неизвестными — x, y, z :
,
ее
главный определитель, составленный из
коэффициентов при неизвестных, имеет
вид
.
Если ,
то,,,
где
, ,.
Пусть
теперь ,
но есть.
Тогда можно утверждать, что, например,
.
Если
же и
,
то в системеесть лишь два независимых уравнения, а
третье является их следствием. В силу
этого система сводится к двум уравнениям
с тремя неизвестными. Такая система
неопределенна и имеет бесчисленное
множество решений: одному можно придавать
любое значение, а остальные неизвестные
определяются из двух независимых –
все решения лежат на прямой, т.е. на
пересечении двух плоскостей. В этом
случае.
Если
же
,
то система несовместна и не имеет
решений. В этом случае среди определителей,,есть хотя бы один, не равный нулю.
Случай,
когда
,
т.е. равны нулю и все его миноры второго
порядка, но есть элементы, не равные
нулю, приводит к выражениям
и
.
Если
же и ,,
то весть лишь одно независимое уравнение.
Система неопределенна, имеет бесчисленное
множество решений (точки плоскости). В
этом случае,
и определители всех миноров второго
порядка также равны нулю.
Если
же ,
или,
то система противоречива и не имеет
решений – параллельные плоскости.
Однородная система трех линейных уравнений с тремя неизвестными.
Однородной
называют систему, в которой ,.
.
Система — неоднородна.
Если вне равен нулю, то система имеет единственное
решение.
Если
же ,
то среди его строк есть линейная
зависимость и востается два или одно независимое
уравнение.
Решение произвольных систем линейных уравнений
Пусть
задана система линейных
уравнений снеизвестными,:
, (1)
или
в матричной форме
, (2)
где
, ,.
Решением
системы (1) или (2) называется любой -компонентный
вектор-столбец или матрица-столбец,
обращающий в верное равенство системы
(1) или (2).
Система
называется совместной,
если у нее существует хотя бы одно
решение. В противном случае, система
несовместна. Две системы называют
эквивалентными, если множества их
решений совпадают.
Теорема
Кронекера–Капелли.
Чтобы система вида (1) была совместна,
необходимо и достаточно, чтобы
,
где — расширенная матрица системы.
Пусть
теперь в системе (2)
,
т.е. она совместна. Можно считать, не
ограничивая общности, что не равный
нулю минор порядкарасполагается в первыхстроках и столбцах матрицы.
Запишем
«укороченную» систему для (1), отбросив
последние уравнений, в виде:
(3)
Эта
система эквивалентна исходной, т.к.
отброшенные уравнения являются линейной
комбинацией оставшихся уравнений.
Неизвестные
называют
базисными, а- свободными. Перенесем теперь свободные
переменные в правую часть (3). В результате
получим систему относительно базисных
неизвестных:
.
Эта
система для любого набора значений
свободных неизвестных имеет единственное
решение:
,
где
,,,— набор свободных неизвестных.
Соответствующее
решение укороченной, а следовательно
и исходной системы имеет вид:
. (4)
Формула
(4) выражает произвольное решение системы
(1) в виде функций от свободных неизвестных и называетсяобщим
решением системы. Каждому конкретному набору
соответствуетчастное
решение.
скалярные величины, задающие некоторое числовое значение — время, температура, масса и т.д.
векторные величины, которые вместе с некоторым числовым значением задают направление — скорость, сила и т.д..
Рассмотрим сначала алгебраический подход к сложению векторов.
Покоординатное сложение векторов.
Пусть даны два вектора, заданные покоординатно ( чтобы вычислить координаты вектора, нужно вычесть из соответствующих координат его конца соответствующие координаты его начала, т.е. из первой координаты — первую, из второй — вторую и т.д.):
Тогда координаты вектора, получившегося при сложении этих двух векторов вычисляются по формуле:
В двумерном случае все абсолютно анологично, просто отбрасываем третью координату.
Теперь перейдем к геометрическому смыслу сложения двух векторов: .
При сложении векторов нужно учитывать и их числовые значения, и направления. Есть несколько широко используемых методов сложения:
правило параллелограмма
правило треугольника
тригонометрический способ
Правило параллелограмма.
Процедура сложения векторов по правилу параллелограмма заключается в следующем:
нарисовать первый вектор, учитывая его величину и направление
от начала первого вектора нарисовать второй вектор, также используя и его величину, и его направление
дополнить рисунок до параллелограмма, считая, что два нарисованных вектора — это его стороны
результирующим вектором будет диагональ параллелограмма, причем его начало будет совпадать с началом первого (а, значит, и второго) вектора.
Правило треугольника
Сложение векторов по правилу треугольника заключается в следующем:
нарисовать первый вектор, используя данные о его длине ( числовой величине) и направлении
от конца первого вектора нарисовать второй вектор, также учитывая и его размер, и его направление
результирующим вектором будет вектор, начало которого совпадает с началом первого вектора, а конец — с концом второго.
Тригонометрический способ
Результирующий вектор сложения двух компланарных векторов может быть вычислен с помощью теоремы косинусов:
Fрез. = [ F12 + F22 -2 F1 F2 cos(180о-α) ]1/2 (1)
где
F = числовое значение вектора
α = угол между векторами 1 и 2
Угол между результирующим вектором и одним из исходных векторов может быть вычислен по теореме синусов:
β = arcsin[ F2 *sin(180o-α) / FR ] (2)
где
α = угол между исходными векторами
Пример — сложение векторов.
Сила 1 равна 5кН и воздействует на тело в направлении, на 80o отличающемся от направления действия второй силы, равной 8 кН.
Результирующая сила вычисляется следующим образом:
Калькулятор ниже может быть использован для любвых векторных величин ( силы, скорости и т.д.) Точка начала вектора совпадает с началами обоих исходных векторов.
Определение. Два вектора называются равными, если они сонаправленные и имеют равные модули.
Иначе, .
Равные векторы можно обозначать одной буквой (с чертой или со стрелкой): . В этом случае говорят, что вектор отложен от точки А. Если , то говорят, что вектор отложен от точки С. Таким образом, любой вектор можно отложить от любой точки пространства S.
Замечание. На самом деле, понятие равенства векторов расширяет само понятие вектора. Если первоначально под вектором мы понимали упорядоченную пару точек пространства S, т.е. направленный отрезок, то теперь под вектором мы будем понимать множество в с е х направленных отрезков, сонаправленных друг с другом и имеющих одинаковую длину. Если один и тот же вектор отложить от двух различных точек, например, , то направленный отрезок можно совместить с направленным отрезком с помощью параллельного переноса. Часто направленные отрезки и называются представителями одного и того же вектора .
п.7. Сложение векторов.
Пусть – множество всех векторов пространства точек S. Определим на этом множестве операцию сложения векторов.
Определение. Пусть – два произвольных вектора.
Отложим вектор , от какой-нибудь точки А и обозначим его конец буквой В, так что . Вектор отложим от точки В (от конца первого вектора) и обозначим его конец буквой С, так что Тогда вектор называется суммой векторов и и обозначается .
А В
С
рис. 7.
Это правило сложения векторов носит название правило треугольника.
Существует еще одно правило сложения векторов, которое называется правилом параллелограмма и дает точно такой же результат.
Оба вектора и отложим от одной точки А и обозначим через В конец вектора , через D – конец вектора .
Достраиваем до параллелограмма. Через точку D проводим прямую параллельную АВ, через точку В – прямую параллельную AD, точку пересечения построенных прямых обозначим буквой С. Тогда ABCD – параллелограмм. Вектор . См. рис.8:
А В
D С
рис. 8.
Равенство следует из равенства векторов и из определения, т.е. из правила треугольника сложения векторов.
Определение. Вектор, начало и конец которого совпадают, называется нулевым вектором.
Обозначение нулевого вектора: .
Заметим, что модуль нулевого вектора равен нулю:
. Более того, нулевой вектор является нулевым элементом относительно сложения векторов. Этот факт сразу же следует из правила треугольника сложения векторов.
Полагаем также, по определению, что нулевой вектор коллинеарный любому вектору и, более того, сонаправленный с любым вектором и, одновременно, противоположно направлен любому вектору.
Определение. Вектор называется противоположным вектору , если:
Из определения противоположного вектора следует, что если , то . Действительно, и . Из правила сложения векторов (правило треугольника) сразу же следует, что сумма противоположных векторов равна нулевому вектору:
, т.е. .
Возможно найдутся ответы здесь:
fxdx.ru
Сложение векторов — это… Что такое Сложение векторов?
1) скоростей и ускорений, 2) сил, 3) моментов сил и количества движения. С. скоростей и ускорений. При разложении движения точки или твердого тела на составляющие движения и при соединении нескольких движений (см. Соединение движений) является представление о зависимости между скоростями этих движений, а также между их ускорениями. В различных учебниках механики и физики, даже элементарных, доказывается, что каковы бы ни были составляемые движения, скорость точки в составном движении есть геометрическая сумма (см.) скоростей ее в составляющих движениях. Правило это общее и не имеющее исключений. Если составляющих движений два, то скорость составного движения есть диагональ параллелограмма, построенного на скоростях составляющих движений. Поэтому правило это называют иногда правилом параллелограмма скоростей. Когда составляющие движения получаются при посредстве твердых тел, движущихся поступательно, то и ускорение составного движения какой-либо точки есть геометрическая сумма ускорений ее в составляющих движениях; но если хотя бы одно из твердых тел движется не поступательно, а имеет вращение, то правило это изменяется вследствие появления так наз. поворотного ускорения, как сказано в статье Поворотное ускорение (см.), где говорится о С. ускорений при двух составляющих движениях. С. и разложение сил (Composition et décomposides forces). Под именем С. сил подразумеваются два различные вопроса механики: 1) определение равнодействующей сил, приложенных к одной точке, и 2) приведение совокупности сил, приложенных к твердому телу, к одной силе или (если нельзя к одной силе) к паре сил, или к двум силам (Réduction des forces appliquées a un corps solide). С. сил, приложенных к одной материальной точке, основывается на втором основном начале механики. Это начало высказывается теперь в таком виде: «Ускорение, получаемое свободною материальною точкою, к которой приложена какая-либо сила, имеет направление этой силы и равно величине этой силы, деленной на массу точки. Если к материальной точке приложено одновременно несколько сил, то, будет ли точка в покое или в движении, каждая сила сообщает такое же ускорение, какое она сообщила бы, действуя отдельно от прочих сил, так что ускорение, сообщаемое точке несколькими одновременно приложенными силами, равно геометрической сумме ускорений, сообщаемых отдельными силами.
Величина и направление ускорения не зависят от скорости, которую имеет точка». Здесь речь идет о материальной точке, о силах к ней приложенных и о ее ускорении. В «С. скоростей и ускорений» было сказано, что ускорения составляющих движений слагаются по правилу геометрического С., если составляющие движения поступательны, без вращений; но о вращении материальной точки, не имеющей размеров, не может быть и речи, поэтому ускорение, сообщаемое точке всеми силами, приложенными к ней одновременно, слагается геометрически из ускорений, сообщаемых каждою из составляющих сил. Так как величины приложенных к одной материальной точке сил пропорциональны величинам сообщаемых им ускорений, то они могут быть изображены векторами, пропорциональными ускорениям и совпадающими с направлениями последних. Из геометрического С. этих векторов получается одна сила, равная геометрической сумме этих составляющих сил, называемая равнодействующею их; она сообщает материальной точке то самое ускорение, которое сообщают все составляющие совместно. Если к материальной точке приложены две силы, то их равнодействующая есть диагональ параллелограмма, построенного на этих силах, как на сторонах. Если составляющих сил несколько, то, построив диагональ на двух силах, строят параллелограм на этой диагонали и на третьей силе; диагональ этого второго параллелограмма будет равнодействующею трех сил и так далее. Поэтому правило С. сил, приложенных к одной материальной точке, называется правилом, или началом, параллелограмма сил. В различных трактатах по механике (напр. у Пуассона) предлагаются доказательства или выводы, исходящие из того основания, что при С. сил, имеющих одно и то же направление, равнодействующая равна их алгебраической сумме и что две равные и противоположные силы взаимно уравновешиваются. Силу, приложенную к точке, можно разложить определенным образом на две, направленные по данным направлениям, заключающимся в одной плоскости с данною силою. Для этого надо построить параллелограмм, имеющий диагональю данную силу, а сторонами — длины, совпадающие с данными направлениями. Можно также вполне определенным образом разложить данную силу, приложенную к точке, на три силы, имеющие данные направления, проходящие через эту точку и не заключающиеся в одной плоскости. Для этого надо построить параллелепипед, имеющий данную силу диагональю, а сторонами — данные направления. Разложение силы на четыре и более направлений или на три направления в одной плоскости есть задача неопределенная. О приведении сил, приложенных к твердому телу, — см. Статика. Сложение моментов сил и количества движения. В статье Момент (см.) дано определение моментов сил, пар сил и количества движения, моменты сил и количеств движений вокруг точки изображаются в виде векторов, которые называются линейными моментами. Линейный момента силы вокруг точки представляется в виде длины, проведенной из точки (полюса), вокруг которой берется момент, в таком направлении, чтобы, стоя ногами в полюсе, головою по этому направлению и глядя на точку приложения силы, видеть направление силы идущим слева направо. Длина вектора должна так относиться к единице длины, как величина момента относится к единице моментов. То же самое следует сказать и о линейном моменте количества движения какой-либо точки. Моменты сил, приложенных к различным точкам, взятые вокруг одного и того же полюса, слагаются по правилу геометрического С. (см.), и геометрическая сумма их называется главным моментом этих сил вокруг точки (полюса). То же самое относится и до линейных моментов количества движения разных точек вокруг одного и того же полюса. Эти моменты тоже геометрически слагаются, и геометрическая сумма их называется главным моментом количества движения. Главные моменты сил и количеств движения постоянно встречаются во многих вопросах механики системы материальных точек и в особенности в механике твердого тела.
Д. Б.
dic.academic.ru
Сложение векторов — Векторы — Математика — Каталог статей
Сложение
векторов.
Все
сказанное пока еще не дает понятие вектора достаточно содержательным и
полезным. Большую содержательность и богатую возможность приложений понятие
вектора получает тогда, когда мы вводим своеобразную «геометрическую
арифметику” – арифметику векторов, позволяющую складывать векторы, вычитать их
и производить над ними целый ряд других операций. Отметим в связи с этим, что
ведь и понятие числа становится интересным лишь при введении арифметических
действий, а не само по себе.
Суммой векторов а и в
с координатами а1, а2 и в1, в2называется
вектор с с координатами а1 + в1, а2 + в2, т.е.
а (а1; а2)
+ в (в1;в2) = с (а1 + в1;
а2 + в2).
Следствие:
Для доказательства коммутативности сложения
векторов на плоскости необходимо рассмотреть пример.
а и в – векторы (рис.5).
Пусть
1.
Строим параллелограмм ОАСВ: АМ II ОВ, ВН II
ОА.
Для доказательства ассоциативности мы
отложим от произвольной точки О вектор ОА = а, от точки А вектор АВ
= в и от точки в – вектор ВС = с. Тогда мы имеем: АВ
+ ВС =АС.
откуда
и следует равенство а + ( в + с ) = (а + в) +
с. Заметим, что приведенное доказательство совсем не использует
чертежа. Это характерно ( при некотором навыке ) для решения задач при помощи
векторов.
Остановимся
теперь на случае, когда векторы а и в направлены в
противоположные стороны и имеют равные длины; такие векторы называют
противоположными. Наше правило сложения векторов приводит к тому, что сумма
двух противоположных векторов представляет собой «вектор”, имеющий нулевую
длину и не имеющий никакого направления; этот «вектор” изображается «отрезком
нулевой длины”, т.е. точкой. Но это тоже вектор, который называется нулевым и
обозначается символом 0.
5.5 Мода и медиана. Их вычисление в дискретных и интервальных вариационных рядах
Мода
и медиана –
особого рода средние, которые используются
для изучения структуры вариационного
ряда. Их иногда называют структурными
средними, в отличие от рассмотренных
ранее степенных средних.
Мода – это величина признака (варианта),
которая чаще всего встречается в данной
совокупности, т.е. имеет наибольшую
частоту.
Мода
имеет большое практическое применение
и в ряде случаев только мода может дать
характеристику общественных явлений.
Медиана – это варианта, которая находится в
середине упорядоченного вариационного
ряда.
Медиана
показывает количественную границу
значения варьирующего признака, которой
достигла половина единиц совокупности.
Применение медианы наряду со средней
или вместо нее целесообразно при наличии
в вариационном ряду открытых интервалов,
т.к. для вычисления медианы не требуется
условное установление границ отрытых
интервалов, и поэтому отсутствие сведений
о них не влияет на точность вычисления
медианы.
Медиану
применяют также тогда, когда показатели,
которые нужно использовать в качестве
весов, неизвестны. Медиану применяют
вместо средней арифметической при
статистических методах контроля качества
продукции. Сумма абсолютных отклонений
варианты от медианы меньше, чем от любого
другого числа.
Рассмотрим
расчет моды и медианы в дискретном
вариационном ряду:
Стаж,
лет, X
Число
рабочих, чел, f
Накопленные
частоты
1
2
2
3
4
6
4
5
(11)
8
4
15
10
1
16
ИТОГО:
16
—
Определить моду и медиану.
Мода
Мо=
4 года, так как этому значению соответствует
наибольшая частота f
= 5.
Т.е.
наибольшее число рабочих имеют стаж 4
года.
Для
того, чтобы вычислить медиану, найдем
предварительно половину суммы частот.
Если сумма частот является числом
нечетным, то мы сначала прибавляем к
этой сумме единицу, а затем делим пополам:
Ме=16/2=8
Медианой
будет восьмая по счету варианта.
Для
того, чтобы найти, какая варианта будет
восьмой по номеру, будем накапливать
частоты до тех пор, пока не получим сумму
частот, равную или превышающую половину
суммы всех частот. Соответствующая
варианта и будет медианой.
Ме= 4 года.
Т.е.
половина рабочих имеет стаж меньше
четырех лет, половина больше.
Если
сумма накопленных частот против одной
варианты равна половине сумме частот,
то медиана определяется как средняя
арифметическая этой варианты и
последующей.
Вычисление
моды и медианы в интервальном вариационном
ряду
Мода
в интервальном вариационном ряду
вычисляется по формуле
где ХМ0 — начальная
граница модального интервала,
hм0 – величина модального интервала,
fм0, fм0-1, fм0+1– частота
соответственно модального интервала,
предшествующего модальному и последующего.
Модальным называется такой интервал, которому
соответствует наибольшая частота.
Пример
1
Группы
по стажу
Число
рабочих, чел
Накопленные
частоты
1
2
3
До
2
4
4
2-4
23
27
4-6
20
47
6-8
35
82
8-10
11
93
свыше
10
7
100
ИТОГО:
100
—
Определить
моду и медиану.
Решение.
Модальный
интервал [6-8], т.к. ему соответствует
наибольшая частота f
= 35. Тогда:
Хм0=6, fм0=35
hм0=2, fм0-1=20
fм0+1=11
Вывод:
Наибольшее число рабочих имеет стаж
примерно 6,7 лет.
Для
интервального ряда Ме вычисляется по
следующей формуле:
Медианный
интервал – такой интервал, которому
соответствует кумулятивная частота,
равная или превышающая половину суммы
частот.
Определим
медиану для нашего примера.
Найдем:
т.к
82>50, то медианный интервал [6-8].
Тогда:
Хме =6, fме =35,
hме =2, Sме-1=47,
Вывод: Половина рабочих имеет стаж
меньше 6,16 лет, а половина имеет стаж
больше, чем 6,16 лет.
studfiles.net
Медиана (статистика) — это… Что такое Медиана (статистика)?
В этой статье не хватает ссылок на источники информации. Информация должна быть проверяема, иначе она может быть поставлена под сомнение и удалена. Вы можете отредактировать эту статью, добавив ссылки на авторитетные источники. Эта отметка установлена 16 ноября 2011.
У этого термина существуют и другие значения, см. Медиана.
Медиа́на(50-й процентиль, квантиль 0,5) — возможное значение признака, которое делит ранжированную совокупность (вариационный ряд выборки) на две равные части: 50 % «нижних» единиц ряда данных будут иметь значение признака не больше, чем медиана, а «верхние» 50 % — значения признака не меньше, чем медиана.
Медиана является важной характеристикой распределения случайной величины и так же, как математическое ожидание, может быть использовано для центрирования распределения. Однако, медиана более робастна и поэтому может быть более предпочтительной для распределений с т.н. тяжёлыми хвостами.
Медиана определяется для широкого класса распределений (например, для всех непрерывных), а в случае неопределённости, естественным образом доопределяется (см. ниже), в то время как математическое ожидание может быть не определено (например, у распределения Коши).
Пример использования
Предположим, что в одной комнате оказалось 19 бедняков и один миллиардер. Каждый кладёт на стол деньги — бедняки из кармана, а миллиардер — из чемодана. По $5 кладёт каждый бедняк, а миллиардер — $1 млрд (109). В сумме получается $1 000 000 095. Если мы разделим деньги равными долями на 20 человек, то получим $50 000 004,75. Это будет среднее арифметическое значение суммы наличных, которая была у всех 20 человек в этой комнате.
Медиана в этом случае будет равна $5 (полусумма десятого и одиннадцатого, срединных значений ранжированного ряда). Можно интерпретировать это следующим образом. Разделив нашу компанию на две равные группы по 10 человек, мы можем утверждать, что в первой группе каждый положил на стол не больше $5, во второй же не меньше $5. В общем случае можно сказать, что медиана это то, сколько принёс с собой средний человек. Наоборот, среднее арифметическое — неподходящая характеристика, так как оно значительно превышает сумму наличных, имеющуюся у среднего человека.
Неуникальность значения
Если имеется чётное количество случаев и два средних значения различаются, то медианой, по определению, может служить любое число между ними (например, в выборке {1, 2, 3, 4} медианой, по определению, может служить любое число из интервала (2,3)). На практике в этом случае чаще всего используют среднее арифметическое двух средних значений.
См. также
Столбчатая диаграмма · Совмещённая диаграмма · Диаграмма управления · Лесная диаграмма · Гистограмма · Q-Q диаграмма · Диаграмма выполнения · Диаграмма разброса · Стебель-листья · Ящик с усами
dic.academic.ru
Мода и медиана 🚩 Математика
Инструкция
Самым распространенным способом оценить среднюю величину в ряду значений является среднее арифметическое. Чтобы его вычислить, нужно сумму всех значений ряда разделить на число этих значений. Например, если дан ряд 3, 4, 8, 12, 17, то его среднее арифметическое равно (3 + 4 + 8 + 12 + 17)/5 = 44/5 = 8,6.
Еще одно среднее, часто встречающееся в математических и статистических задачах, называется средним гармоническим. Среднее гармоническое от чисел a0, a1, a2… an равно n/(1/a0 + 1/a1 + 1/a2… +1/an). Например, для того же ряда, что и в предыдущем примере, среднее гармоническое будет равно 5/(1/3 + 1/4 + 1/8 + 1/12 + 1/17) = 5/(347/408) = 5,87. Среднее гармоническое всегда меньше среднего арифметического. Различные средние используются в разных видах задач. Например, если известно, что автомобиль первый час ехал со скоростью A, а второй — со скоростью B, то его средняя скорость за время пути будет равна среднему арифметическому между A и B. Но если известно, что автомобиль проехал один километр со скоростью A, а следующий — со скоростью B, то, чтобы вычислить его среднюю скорость за время пути, нужно будет взять среднее гармоническое между A и B.
Для статистических целей среднее арифметическое представляет удобную и объективную оценку, но только в тех случаях, когда среди значений ряда нет резко выделяющихся. Например, для ряда 1, 2, 3, 4, 5, 6, 7, 8, 9, 200 среднее арифметическое будет равно 24, 5 — заметно больше всех членов ряда, кроме последнего. Очевидно, что такую оценку нельзя считать полностью адекватной.
В таких случаях следует вычислить медиану ряда. Это средняя величина, значение которой находится ровно посередине ряда так, что все члены ряда, расположенные до медианы — не больше нее, а все, расположенные после — не меньше. Конечно, для этого нужно вначале упорядочить члены ряда по возрастанию.
Если в ряду a0… an нечетное количество значений, то есть n = 2k + 1, то за медиану принимается член ряда с порядковым номером k + 1. Если же количество значений четное, то есть n = 2k, то медианой считается среднее арифметическое членов ряда с номерами k и k + 1. Например, в уже рассмотренном ряду 1, 2, 3, 4, 5, 6, 7, 8, 9, 200 десять членов. Следовательно, его медиана — среднее арифметическое между пятым и шестым членами, то есть (5 + 6)/2 = 5,5. Эта оценка гораздо лучше отражает усредненное значение типичного члена ряда.
www.kakprosto.ru
Как найти медиану в статистике
Задача. На улице длиной 1 км находится 10 многоэтажных домов. При принятии решения где лучше построить магазин был проведен опрос о количестве предполагаемых посещений магазина жителями каждого дома. Данные опроса: Расстояние от начала улицы до дома Количество посещений 70 10 260 15 280 5 370 20 400 5 460 25 600 15 780 30 860 10 920 65 Всего посещений 200 Необходимо построить магазин так, чтоб общее расстояние, которое будут проходить покупатели, было наименьшим.
Решение. Рассмотрим 1-й вариант, согласно которому магазин будет построен посередине улицы, то есть на 500-м метре (в центре диапазона). Тогда посетители с учетом количества походов в магазин пройдут:
(м) = 1598,3 (км) 2-й вариант. Магазин построят на среднем участке улицы, который определяется по формуле средней арифметической с учетом числа посещений:
(м) (м) В таком случае покупатели пройдут расстояние:
49515 (м) = 49,515 (км) 3-й вариант. Если построить магазин на 780-м метре, что соответствует медиане по числу посещений (накопленное число посещений для 600 м — 95, а для 780 м — 125). В таком случае посетители будут проходить расстояние:
(м) = 48,1 (км) Таким образом, в третьем случае мы получили общее пройденное расстояние меньшее от двух предыдущих случаев. Значит, медиане соответствует самый лучший результат — минимальное общее пройденное расстояние.
Ответ. Магазин нужно строить на 780 метре улицы.
ru.solverbook.com
Структурные средние величины. Мода и медиана
Структурные средние величины. Мода и медиана
Для характеристики структуры статистической совокупности применяются показатели, которые называют структурными средними. К ним относятся мода и медиана. Мода (Мо) – чаще всего встречающийся вариант. Модой называется значение признака, которое соответствует максимальной точке теоретической кривой распределений. Мода представляет наиболее часто встречающееся или типичное значение. Мода применяется в коммерческой практике для изучения покупательского спроса и регистрации цен. В дискретном ряду мода – это варианта с наибольшей частотой. В интервальном вариационном ряду модой считают центральный вариант интервала, который имеет наибольшую частоту (частность). В пределах интервала надо найти то значение признака, которое является модой.
где x0– нижняя граница модального интервала; h– величина модального интервала; fm– частота модального интервала; fm -1 – частота интервала, предшествующего модальному; fm+ 1 – частота интервала, следующего за модальным. Мода зависит от величины групп, от точного положения границ групп. 31б Мода – число, которое в действительности встречается чаще всего (является величиной определенной), в практике имеет самое широкое применение (наиболее часто встречающийся тип покупателя). Медиана (Me)– это величина, которая делит численность упорядоченного вариационного ряда на две равные части: одна часть имеет значения варьирующего признака меньшие, чем средний вариант, а другая – большие. Медиана – это элемент, который больше или равен и одновременно меньше или равен половине остальных элементов ряда распределения. Свойство медианы заключается в том, что сумма абсолютных отклонений значений признака от медианы меньше, чем от любой другой величины. Применение медианы позволяет получить более точные результаты, чем при использовании других форм средних. Порядок нахождения медианы в интервальном вариационном ряду следующий: располагаем индивидуальные значения признака по ранжиру; определяем для данного ранжированного ряда накопленные частоты; по данным о накопленных частотах находим медианный интервал: Медиана делит численность ряда пополам, следовательно, она там, где накопленная частота составляет половину или больше половины всей суммы частот, а предыдущая (накопленная) частота меньше половины численности совокупности.
cribs.me
Медиана (статистика) — это… Что такое Медиана (статистика)?
В этой статье не хватает ссылок на источники информации. Информация должна быть проверяема, иначе она может быть поставлена под сомнение и удалена. Вы можете отредактировать эту статью, добавив ссылки на авторитетные источники. Эта отметка установлена 16 ноября 2011.
У этого термина существуют и другие значения, см. Медиана.
Медиа́на(50-й процентиль, квантиль 0,5) — возможное значение признака, которое делит ранжированную совокупность (вариационный ряд выборки) на две равные части: 50 % «нижних» единиц ряда данных будут иметь значение признака не больше, чем медиана, а «верхние» 50 % — значения признака не меньше, чем медиана.
Медиана является важной характеристикой распределения случайной величины и так же, как математическое ожидание, может быть использовано для центрирования распределения. Однако, медиана более робастна и поэтому может быть более предпочтительной для распределений с т.н. тяжёлыми хвостами.
Медиана определяется для широкого класса распределений (например, для всех непрерывных), а в случае неопределённости, естественным образом доопределяется (см. ниже), в то время как математическое ожидание может быть не определено (например, у распределения Коши).
Пример использования
Предположим, что в одной комнате оказалось 19 бедняков и один миллиардер. Каждый кладёт на стол деньги — бедняки из кармана, а миллиардер — из чемодана. По $5 кладёт каждый бедняк, а миллиардер — $1 млрд (109). В сумме получается $1 000 000 095. Если мы разделим деньги равными долями на 20 человек, то получим $50 000 004,75. Это будет среднее арифметическое значение суммы наличных, которая была у всех 20 человек в этой комнате.
Медиана в этом случае будет равна $5 (полусумма десятого и одиннадцатого, срединных значений ранжированного ряда). Можно интерпретировать это следующим образом. Разделив нашу компанию на две равные группы по 10 человек, мы можем утверждать, что в первой группе каждый положил на стол не больше $5, во второй же не меньше $5. В общем случае можно сказать, что медиана это то, сколько принёс с собой средний человек. Наоборот, среднее арифметическое — неподходящая характеристика, так как оно значительно превышает сумму наличных, имеющуюся у среднего человека.
Неуникальность значения
Если имеется чётное количество случаев и два средних значения различаются, то медианой, по определению, может служить любое число между ними (например, в выборке {1, 2, 3, 4} медианой, по определению, может служить любое число из интервала (2,3)). На практике в этом случае чаще всего используют среднее арифметическое двух средних значений.
См. также
Столбчатая диаграмма · Совмещённая диаграмма · Диаграмма управления · Лесная диаграмма · Гистограмма · Q-Q диаграмма · Диаграмма выполнения · Диаграмма разброса · Стебель-листья · Ящик с усами
Определить максимальную скорость vmax фотоэлектронов — 30 Января 2013 — Примеры решений задач
Решение задач по физике, квантовая природа излучения.
Пример 1 решения задачи. Определить максимальную скорость vmax фотоэлектронов, вырываемых с поверхности цинка ( работа выхода А=4эВ) при облучении γ-излучением с длиной волны λ=2,47пм.
Дано: А=4эВ, λ=2,47пм, Найти: vmax
Решение задачи:
Пример 2 решения задачи.Определить максимальную скорость vmax фотоэлектронов, вылетающих из металла под действием γ-излучения с длиной волны λ=0,3 нм.
Решение задачи:
Задачи для самостоятельного решения:
1. Определить максимальную скорость vmax фотоэлектронов, вылетающих из металла при облучении γ-фотонами с энергией ε=1,53 МэВ.
2.Максимальная скорость vmax фотоэлектронов, вылетающих из металла при облучении его γ-фотонами, равна 291 Мм/с. Определить энергию ε γ-фотонов.
3. Определить длину волны λ ультрафиолетового излучения, падающего на поверхность некоторого металла, при максимальной скорости фотоэлектронов, равной 10 Мм/с. Работой выхода электронов из металла пренебречь.
4. На цинковую пластинку падает монохроматический свет с длиной волны λ=220 нм. Определить максимальную скорость vmax фотоэлектронов.
5. Для прекращения фотоэффекта, вызванного облучением ультрафиолетовым светом платиновой пластинки, нужно приложить
задерживающую разность потенциалов U1=3,7 В. Если платиновую пластинку заменить другой пластинкой, то задерживающую разность потенциалов придется увеличить до 6 В. Определить работу А выхода электронов с поверхности этой пластинки.
6. На поверхность лития падает монохроматический свет (λ=310 нм). Чтобы прекратить эмиссию электронов, нужно приложить задерживающую разность потенциалов U не менее 1,7 В. Определить работу выхода А.
7. Какая доля энергии фотона израсходована на работу вырывания фотоэлектрона, если красная граница фотоэффекта λ0=307 нм и максимальная кинетическая энергия Tmax фотоэлектрона равна 1 эВ?
8. Будет ли наблюдаться фотоэффект, если на поверхность серебра направить ультрафиолетовое излучение с длиной волны λ=300 нм?
9. Определить работу выхода А электронов из натрия, если красная граница фотоэффекта λ0=500 нм.
www.reshim.su
Задачи на тему Фотоэлектрический эффект
Нашли ошибку? Сообщите в комментариях (внизу страницы)
Квантово-оптические явления. Физика атома § 35. Фотоэлектрический эффект
1 Определить максимальную скорость vmax фотоэлектронов, вырываемых с поверхности серебра: 1) ультрафиолетовым излучением с длиной волны λ1=0,155 мкм; 2) γ-излучением с длиной волны λ2=2,47 пм. РЕШЕНИЕ
2 Определить красную границу λ0 фотоэффекта для цезия, если при облучении его поверхности фиолетовым светом длиной волны λ=400 нм максимальная скорость vmax фотоэлектронов равна 0,65 Мм/с. РЕШЕНИЕ
35.1 Определить работу выхода А электронов из натрия, если красная граница фотоэффекта λ0=500 нм. РЕШЕНИЕ
35.2 Будет ли наблюдаться фотоэффект, если на поверхность серебра направить ультрафиолетовое излучение с длиной волны λ=300 нм? РЕШЕНИЕ
35.3 Какая доля энергии фотона израсходована на работу вырывания фотоэлектрона, если красная граница фотоэффекта λ0=307 нм и максимальная кинетическая энергия Tmax фотоэлектрона равна 1 эВ? РЕШЕНИЕ
35.4 На поверхность лития падает монохроматический свет (λ=310 нм). Чтобы прекратить эмиссию электронов, нужно приложить задерживающую разность потенциалов U не менее 1,7 B. Определить работу выхода A. РЕШЕНИЕ
35.5 Для прекращения фотоэффекта, вызванного облучением ультрафиолетовым светом платиновой пластинки, нужно приложить задерживающую разность потенциалов U1=3,7 B. Если платиновую пластинку заменить другой пластинкой, то задерживающую разность потенциалов придется увеличить до 6 B. Определить работу А выхода электронов с поверхности этой пластинки. РЕШЕНИЕ
35.6 На цинковую пластинку падает монохроматический свет с длиной волны λ=220 нм. Определить максимальную скорость vmax фотоэлектронов. РЕШЕНИЕ
35.7 Определить длину волны λ ультрафиолетового излучения, падающего на поверхность некоторого металла, при максимальной скорости фотоэлектронов, равной 10 Мм/с. Работой выхода электронов из металла пренебречь. РЕШЕНИЕ
35.8 Определить максимальную скорость vmax фотоэлектронов, вылетающих из металла под действием γ-излучения с длиной волны λ=0,3 нм. РЕШЕНИЕ
35.9 Определить максимальную скорость vmax фотоэлектронов, вылетающих из металла при облучении γ-фотонами с энергией ε=1,53 МэВ. РЕШЕНИЕ
35.10 Максимальная скорость vmax фотоэлектронов, вылетающих из металла при облучении его γ-фотонами, равна 291 Мм/с. Определить энергию ε γ-фотонов. РЕШЕНИЕ
bambookes.ru
Физика. Чертов А.Г. Задача № 35.8!
Физика. Чертов А.Г.
Квантово-оптические явления. Физика атома
Фотоэлектрический эффект
35.8!
Условие задачи 35.8!:
Определить максимальную скорость vmax фотоэлектронов, вылетающих из металла под действием γ-излучения с длиной волны λ=0,3 нм.
Решение задачи:
СДЕЛАЙТЕ РЕПОСТ
Решение
задачи 35.8!
Предыдущая
задача:
35.7 Определить максимальную скорость vmax фотоэлектронов, вылетающих из металла под действием γ-излучения с длиной волны λ=0,3 нм.
Следующая
задача:
35.9 Определить максимальную скорость vmax фотоэлектронов, вылетающих из металла под действием γ-излучения с длиной волны λ=0,3 нм. С другими задачами из решебника по физике Чертова вы можете ознакомиться в соответствующем разделе решебника Физика. Чертов А.Г.
Материалы:
Скачать задачник Чертова по физике
(9.3мб)
studassistent.ru
Физика. Чертов А.Г. Задача № 35.9
Физика. Чертов А.Г.
Квантово-оптические явления. Физика атома
Фотоэлектрический эффект
35.9
Условие задачи 35.9:
Определить максимальную скорость vmax фотоэлектронов, вылетающих из металла при облучении γ-фотонами с энергией ε=1,53 МэВ.
Решение задачи:
СДЕЛАЙТЕ РЕПОСТ
Решение
задачи 35.9
Предыдущая
задача:
35.8! Определить максимальную скорость vmax фотоэлектронов, вылетающих из металла при облучении γ-фотонами с энергией ε=1,53 МэВ.
Следующая
задача:
35.10 Определить максимальную скорость vmax фотоэлектронов, вылетающих из металла при облучении γ-фотонами с энергией ε=1,53 МэВ. С другими задачами из решебника по физике Чертова вы можете ознакомиться в соответствующем разделе решебника Физика. Чертов А.Г.
Материалы:
Скачать задачник Чертова по физике
(9.3мб)
studassistent.ru
Определите модуль максимальной скорости фотоэлектронов
Задача. Определите модуль максимальной скорости фотоэлектронов, вылетевших с поверхности цинка при освещении его ультрафиолетовым излучением длиной волны
нм.
Дано:
нм
Найти:
— ?
Решение
Думаем: по слову «фотоэлектронов» мы определяем, что задача касается явления фотоэффекта. Тогда можем воспользоваться уравнением Эйнштейна для фотоэффекта:
(1)
где
Дж/с — постоянная Планка, — работа выхода металла (для нашей задачи — цинк). Пользуясь табличными данными Дж. Заодно припомним и скорость света м/с. Кроме того, для решения нам необходима масса электрона ( кг).
Решаем: исходя из (1) получим
Считаем:
м/с
Ответ:
м/с.
Ещё задачи на тему «Квантовые явления. Фотоэффект».
Определите модуль максимальной скорости фотоэлектронов обновлено: Январь 28, 2018 автором: Иван Иванович
Поделиться ссылкой:
Twitter
Facebook
Telegram
WhatsApp
www.abitur.by
определить максимальную скорость фотоэлектронов
определить максимальную скорость фотоэлектронов
Задача 80093
Определить максимальную скорость фотоэлектронов, вырываемых с поверхности серебра ультрафиолетовыми лучами с длиной волны λ = 0,155 мкм. Работа выхода для серебра AВ = 4,7 эВ.
Задача 80249
На поверхность лития падают лучи с длиной волны λ = 4 нм. Пренебрегая работой выхода определить максимальную скорость фотоэлектрона.
Задача 80442
На поверхность вольфрама (работа выхода А = 4,52 эВ) падает γ-излучение с длиной волны λ = 1 пм. Определить максимальную скорость фотоэлектронов, которые вырываются с поверхности вольфрама.
Задача 26458
На поверхность лития падает рентгеновское излучение с длиной волны 1 нм. Определить максимальную скорость фотоэлектронов. Можно ли пренебречь работой выхода электрона?
Задача 11599
Определить максимальную скорость фотоэлектронов, вылетающих из металла при облучении γ-квантами с энергией 1,53 МэВ.
Задача 12345
На платиновую пластину падает излучение с длиной волны 180 нм. Определить максимальную скорость фотоэлектронов. Работа выхода электронов из платины А = 6,3 эВ.
Задача 12353
Определить максимальную скорость фотоэлектронов, вылетающих из металла при облучении γ-квантами с длиной волны λ = 0,5 нм. Учесть зависимость скорости электронов от энергии фотонов.
Задача 12355
Определить максимальную скорость vmax фотоэлектронов, вырываемых с поверхности цинка (работа выхода А = 4 эВ) при облучении γ-излучением с длиной волны λ = 2,47 пм.
Задача 12357
Определите максимальную скорость фотоэлектронов, вырываемых с поверхности металла, если фототок прекращается при приложении задерживающего напряжения 3,7 В.
Задача 12359
Фототок прекращается при задерживающем потенциале 4,3 В. Определить максимальную скорость фотоэлектронов, вырываемых с поверхности металла.
Задача 12360
Определите максимальную скорость фотоэлектронов, если фототок прекращается при задерживающем напряжении 0,80 В.
Задача 12346
Определить максимальную скорость фотоэлектронов, вырываемых с поверхности цинка при облучении его излучением с длиной волны λ = 247 нм.
Задача 15277
Красная граница фотоэффекта для некоторого металла 660 нм. Определите максимальную скорость фотоэлектронов, вырываемых с поверхности металла светом с длиной волны 220 нм.
Задача 18178
Определите максимальную скорость фотоэлектрона, вырванного с поверхности золота фотоном с энергией 9,3 эВ.
reshenie-zadach.com.ua
Задачи на тему Фотоэлектрический эффект
.
Квантово-оптические явления. Физика атома § 35. Фотоэлектрический эффект
1 Определить максимальную скорость vmax фотоэлектронов, вырываемых с поверхности серебра: 1) ультрафиолетовым излучением с длиной волны λ1=0,155 мкм; 2) γ-излучением с длиной волны λ2=2,47 пм. РЕШЕНИЕ
2 Определить красную границу λ0 фотоэффекта для цезия, если при облучении его поверхности фиолетовым светом длиной волны λ=400 нм максимальная скорость vmax фотоэлектронов равна 0,65 Мм/с. РЕШЕНИЕ
35.1 Определить работу выхода А электронов из натрия, если красная граница фотоэффекта λ0=500 нм. РЕШЕНИЕ
35.2 Будет ли наблюдаться фотоэффект, если на поверхность серебра направить ультрафиолетовое излучение с длиной волны λ=300 нм? РЕШЕНИЕ
35.3 Какая доля энергии фотона израсходована на работу вырывания фотоэлектрона, если красная граница фотоэффекта λ0=307 нм и максимальная кинетическая энергия Tmax фотоэлектрона равна 1 эВ? РЕШЕНИЕ
35.4 На поверхность лития падает монохроматический свет (λ=310 нм). Чтобы прекратить эмиссию электронов, нужно приложить задерживающую разность потенциалов U не менее 1,7 B. Определить работу выхода A. РЕШЕНИЕ
35.5 Для прекращения фотоэффекта, вызванного облучением ультрафиолетовым светом платиновой пластинки, нужно приложить задерживающую разность потенциалов U1=3,7 B. Если платиновую пластинку заменить другой пластинкой, то задерживающую разность потенциалов придется увеличить до 6 B. Определить работу А выхода электронов с поверхности этой пластинки. РЕШЕНИЕ
35.6 На цинковую пластинку падает монохроматический свет с длиной волны λ=220 нм. Определить максимальную скорость vmax фотоэлектронов. РЕШЕНИЕ
35.7 Определить длину волны λ ультрафиолетового излучения, падающего на поверхность некоторого металла, при максимальной скорости фотоэлектронов, равной 10 Мм/с. Работой выхода электронов из металла пренебречь. РЕШЕНИЕ
35.8 Определить максимальную скорость vmax фотоэлектронов, вылетающих из металла под действием γ-излучения с длиной волны λ=0,3 нм. РЕШЕНИЕ
35.9 Определить максимальную скорость vmax фотоэлектронов, вылетающих из металла при облучении γ-фотонами с энергией ε=1,53 МэВ. РЕШЕНИЕ
35.10 Максимальная скорость vmax фотоэлектронов, вылетающих из металла при облучении его γ-фотонами, равна 291 Мм/с. Определить энергию ε γ-фотонов. РЕШЕНИЕ
Перспектива плоскости квадрата ABCD может быть построена если заданы ее ортогональные проекции.
Перспектива плоскости квадрата
Перспектива плоскости квадрата ABCD может быть построена, если будет обеспечено последовательное выполнение следующих действий:
Перспектива плоскости квадрата
— выбор положения следа картинной плоскости. Плоскость картины совпадает с одной из вершин квадрата или с одной из его сторон;
— выбор положения точки зрения S выполняем так, чтобы главный луч зрения SP, перпендикулярный картинной плоскости, проходя через нее, делил перспективное изображение
плоскости квадрата примерно пополам;
— в дополнение к имеющейся точке D1 строим точки A1 и C1, проводя к ним лучи SA1 и SC1 и отмечая точки AK и CK в пересечении лучей с картинной плоскостью;
— строим перспективное изображение A1C1 стороны AC;
— параллельно A1D1 проводим вспомогательный луч из точки S и находим точку схода стороны AD;
— параллельно D1C1 проводим вспомогательный луч из точки S и находим точку схода стороны DC;
— точку схода стороны AD переносим на с основания картинной плоскости на заданную линию горизонта в точку F1;
— точку схода стороны DC переносим на с основания картинной плоскости на заданную линию горизонта в точку F2;
— из точки F1 проводим прямые F1D1 и F1D0;
— в пересечении перпендикуляра к основанию картины в точке AK с прямыми F1D1 и F1D0 находим точки A1 и
D0;
— из точки F2 проводим прямые F2D1 и F2D0;
— в пересечении перпендикуляра к основанию картины в точке CK с прямыми F2D1 и F2D0 находим точки C1 и C0;
— из точки F1 проводим прямые F1C1, из точки F2 проводим прямые F2A1 и в их пересечении находим B1;
— соединяем прямыми линиями точки A1, B1, C1 и D1, получая замкнутый контур перспективного изображения плоскости квадрата.
+
ngeo.fxyz.ru
Как построить третью проекцию 🚩 построение третьих проекций по двум данным 🚩 Математика
Вам понадобится
– лист ватмана;
– чертежные принадлежности;
– чертежная доска.
Инструкция
Выберите формат листа, на котором будет выполняться чертеж – в соответствии с ГОСТ 9327-60. Формат должен быть таким, чтобы на листе можно было разместить основные виды детали в соответствующем масштабе, а также все необходимые разрезы и сечения. Для несложных деталей выбирают формат А4 (210х297 мм) или А3 (297х420 мм). Первый может располагаться своей длинной стороной только вертикально, второй – вертикально и горизонтально.
Начертите рамку чертежа, отступив от левого края листа 20 мм, от остальных трех – 5 мм. Начертите основную надпись – таблицу, в которую заносятся все данные о детали и чертеже. Ее размеры определяются ГОСТ 2.108-68. Ширина основной надписи является неизменной – 185 мм, высота варьируется от 15 до 55 мм в зависимости от назначения чертежа и вида учреждения, для которого он выполняется.
Выберите масштаб главного изображения. Возможные масштабы определяются ГОСТ 2.302-68. Их следует выбрать такими, чтобы на чертеже хорошо просматривались все основные элементы детали. Если при этом некоторые места просматриваются не достаточно ясно, их можно вынести отдельным видом, показав с необходимым увеличением.
Выберите главное изображение детали. Оно должно представлять собой такое направление взгляда на деталь (направление проецирования), с которого ее конструкция раскрывается наиболее полно. В большинстве случаев главным изображением является положение, в котором деталь находится на станке во время выполнения основной операции. Детали, имеющие ось вращения, располагаются на главном изображении, как правило, таким образом, чтобы ось имела горизонтальное положение. Главное изображение располагается в верхней части чертежа слева (если имеется три проекции) или близко к центру (при отсутствии боковой проекции).
Определите расположение остальных изображений (вида сбоку, сверху, сечений, разрезов). Виды детали образуются ее проецированием на три или две взаимно перпендикулярные плоскости (метод Монжа). При этом деталь должна располагаться таким образом, чтобы большинство или все ее элементы проецировались без искажения. Если какой-то из этих видов является информационно излишним, не выполняйте его. Чертеж должен иметь только те изображения, которые необходимы.
Выберите разрезы и сечения, которые необходимо выполнить. Их отличие друг от друга состоит в том, что на разрезе показывается и то, что находится за секущей плоскостью, в то время как на сечении отображает только то, что располагается в самой плоскости. Секущая плоскость может быть ступенчатой и ломаной.
Приступите непосредственно к черчению. При начертании линий руководствуйтесь ГОСТ 2.303-68, в котором определяются виды линий и их параметры. Располагайте изображения друг от друга на таком расстоянии, чтобы оставалось достаточно места для простановки размеров. Если плоскости разрезов проходят по монолиту детали, штрихуйте сечения линиями, идущими под углом 45°. Если при этом линии штриховки совпадают с основными линиями изображения, можно чертить их под углом 30° или 60°.
Начертите размерные линии и проставьте размеры. При этом руководствуйтесь следующими правилами. Расстояние от первой размерной линии до контура изображения должно быть не менее 10 мм, расстояние между соседними размерными линиями – не менее 7 мм. Стрелки должны иметь длину около 5 мм. Написание цифр осуществляйте в соответствии с ГОСТ 2.304-68, их высоту принимайте равной 3,5-5 мм. Цифры размещайте ближе к середине размерной линии (но не на оси изображения) с некоторым смещением относительно цифр, проставленных на соседних размерных линиях.


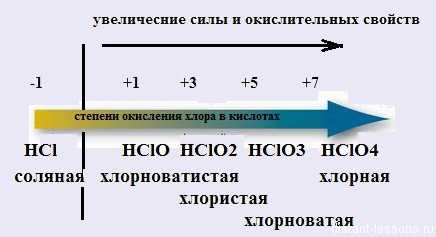

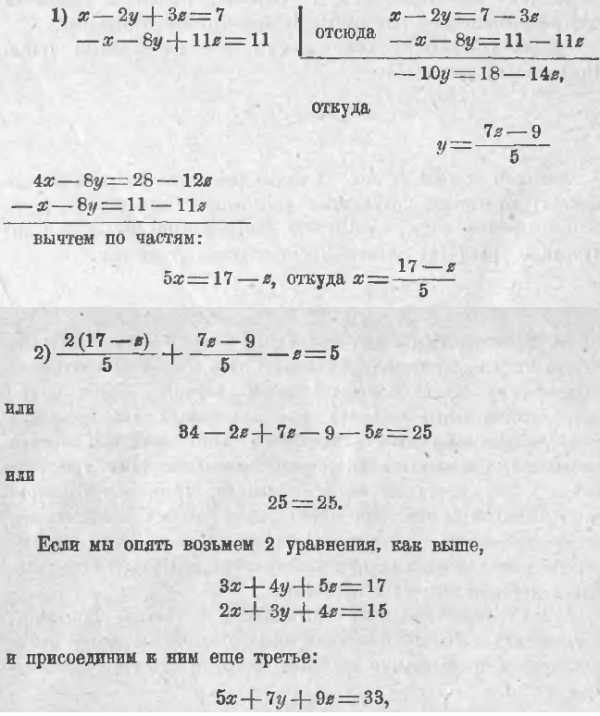
 ,
, 
 .
. ,
то
,
то ,
, ,
, ,
где
,
где ,
,  ,
, .
. ,
но есть
,
но есть .
Тогда можно утверждать, что, например,
.
Тогда можно утверждать, что, например, есть лишь два независимых уравнения, а
третье является их следствием. В силу
этого система сводится к двум уравнениям
с тремя неизвестными. Такая система
неопределенна и имеет бесчисленное
множество решений: одному можно придавать
любое значение, а остальные неизвестные
определяются из двух независимых –
все решения лежат на прямой, т.е. на
пересечении двух плоскостей. В этом
случае.
есть лишь два независимых уравнения, а
третье является их следствием. В силу
этого система сводится к двум уравнениям
с тремя неизвестными. Такая система
неопределенна и имеет бесчисленное
множество решений: одному можно придавать
любое значение, а остальные неизвестные
определяются из двух независимых –
все решения лежат на прямой, т.е. на
пересечении двух плоскостей. В этом
случае. ,,
,, есть хотя бы один, не равный нулю.
есть хотя бы один, не равный нулю. ,
, ,
то в
,
то в есть лишь одно независимое уравнение.
Система неопределенна, имеет бесчисленное
множество решений (точки плоскости). В
этом случае,
и определители всех миноров второго
порядка также равны нулю.
есть лишь одно независимое уравнение.
Система неопределенна, имеет бесчисленное
множество решений (точки плоскости). В
этом случае,
и определители всех миноров второго
порядка также равны нулю. ,
или
,
или ,
то система противоречива и не имеет
решений – параллельные плоскости.
,
то система противоречива и не имеет
решений – параллельные плоскости. ,
, .
. .
. 
 — неоднородна.
— неоднородна. в
в не равен нулю, то система имеет единственное
решение.
не равен нулю, то система имеет единственное
решение. ,
то среди его строк есть линейная
зависимость и в
,
то среди его строк есть линейная
зависимость и в остается два или одно независимое
уравнение.
остается два или одно независимое
уравнение. линейных
уравнений с
линейных
уравнений с неизвестными,
неизвестными, :
: , (1)
, (1) ,
,  ,
, .
. -компонентный
вектор-столбец или матрица-столбец
-компонентный
вектор-столбец или матрица-столбец ,
обращающий в верное равенство системы
(1) или (2).
,
обращающий в верное равенство системы
(1) или (2). — расширенная матрица системы.
— расширенная матрица системы. располагается в первых
располагается в первых строках и столбцах матрицы
строках и столбцах матрицы .
. уравнений, в виде:
уравнений, в виде: (3)
(3) ,
, ,
, ,,
,, — набор свободных неизвестных.
— набор свободных неизвестных. . (4)
. (4) свободных неизвестных и называетсяобщим
решением системы. Каждому конкретному набору
соответствуетчастное
решение.
свободных неизвестных и называетсяобщим
решением системы. Каждому конкретному набору
соответствуетчастное
решение. ,
, 
 .
. ,
то
,
то ,,
,, ,
где
,
где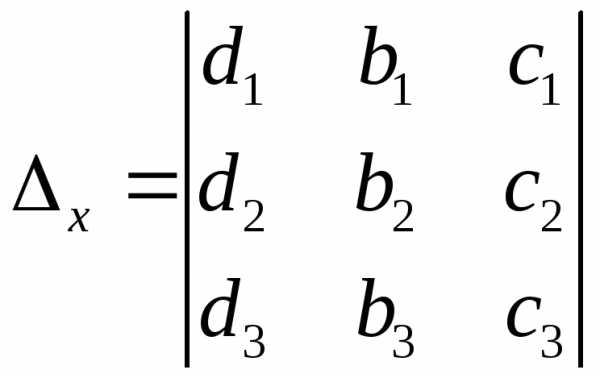 ,
, 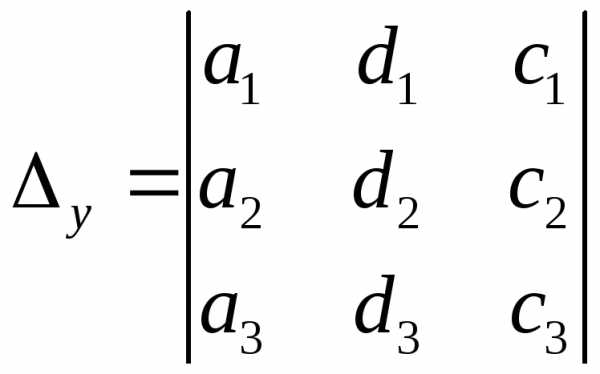 ,
, .
. ,
но есть
,
но есть .
Тогда можно утверждать, что, например,
.
Тогда можно утверждать, что, например, есть лишь два независимых уравнения, а
третье является их следствием. В силу
этого система сводится к двум уравнениям
с тремя неизвестными. Такая система
неопределенна и имеет бесчисленное
множество решений: одному можно придавать
любое значение, а остальные неизвестные
определяются из двух независимых –
все решения лежат на прямой, т.е. на
пересечении двух плоскостей. В этом
случае.
есть лишь два независимых уравнения, а
третье является их следствием. В силу
этого система сводится к двум уравнениям
с тремя неизвестными. Такая система
неопределенна и имеет бесчисленное
множество решений: одному можно придавать
любое значение, а остальные неизвестные
определяются из двух независимых –
все решения лежат на прямой, т.е. на
пересечении двух плоскостей. В этом
случае. ,
, ,
, есть хотя бы один, не равный нулю.
есть хотя бы один, не равный нулю. ,
, ,
то в
,
то в есть лишь одно независимое уравнение.
Система неопределенна, имеет бесчисленное
множество решений (точки плоскости). В
этом случае,
и определители всех миноров второго
порядка также равны нулю.
есть лишь одно независимое уравнение.
Система неопределенна, имеет бесчисленное
множество решений (точки плоскости). В
этом случае,
и определители всех миноров второго
порядка также равны нулю. ,
или
,
или ,
то система противоречива и не имеет
решений – параллельные плоскости.
,
то система противоречива и не имеет
решений – параллельные плоскости. ,
, .
. .
. 
 — неоднородна.
— неоднородна. в
в не равен нулю, то система имеет единственное
решение.
не равен нулю, то система имеет единственное
решение. ,
то среди его строк есть линейная
зависимость и в
,
то среди его строк есть линейная
зависимость и в остается два или одно независимое
уравнение.
остается два или одно независимое
уравнение. линейных
уравнений с
линейных
уравнений с неизвестными,
неизвестными, :
: , (1)
, (1) ,
,  ,
, .
. -компонентный
вектор-столбец или матрица-столбец
-компонентный
вектор-столбец или матрица-столбец ,
обращающий в верное равенство системы
(1) или (2).
,
обращающий в верное равенство системы
(1) или (2). — расширенная матрица системы.
— расширенная матрица системы. располагается в первых
располагается в первых строках и столбцах матрицы
строках и столбцах матрицы .
. уравнений, в виде:
уравнений, в виде: (3)
(3) ,
, ,,
,, — набор свободных неизвестных.
— набор свободных неизвестных. . (4)
. (4) свободных неизвестных и называетсяобщим
решением системы. Каждому конкретному набору
соответствуетчастное
решение.
свободных неизвестных и называетсяобщим
решением системы. Каждому конкретному набору
соответствуетчастное
решение.