Удобный миллиметровый калькулятор поможет вам преобразовать значения миллиметров в другие единицы измерения длины в метрической и имперской системах. Здесь мы рассмотрим, что такое мм (миллиметр) и как преобразовать мм в м, среди других единиц длины.
Что такое мм (миллиметр)?
Что означает мм? Две буквы мм обозначают миллиметры и являются единицей измерения длины.
Помните, что все выражают свой рост в сантиметрах или в комбинации футов и дюймов, в зависимости от того, где вы живете. Эти значения относятся к длине чего-либо, точно так же, как миллиметр.
Сколько стоит миллиметр? Миллиметр равен 1000 метра (м) , а метр равен 1/299,792,458 расстояния, которое свет проходит в вакууме за одну секунду .
Как преобразовать мм в м?
Теперь, когда мы знаем, что означает миллиметры, мы можем использовать следующую картинку, чтобы описать, как преобразовать миллиметры в метры.
Вы должны разделить на десять, а затем на 100. Будьте осторожны с этими факторами; в противном случае вам пришлось бы конвертировать миллиметры в километры. В любом случае вы можете проверить результат в нашем калькуляторе мм.
Приведем пример: я хочу знать, сколько метров в 1430 миллиметрах:
1430 мм/10=143 см\размер сноски \rm {1430 \ мм / 10 = 143 \ см}1430 мм/10=143 см, тогда 143 см/100=1,43 метра\размер сноски \rm {143 \ см / 100 = 1,43 \ метра} 143 см/100 = 1,43 метра
Обратите внимание, как мы следовали шагам, как показано на рисунке выше. Вы можете сделать то же самое, если хотите преобразовать в см, м или км.
Как преобразовать мм в дюймы?
В этом случае нужно помнить, что 1 дюйм равен 25,4 мм. Тогда, если у вас есть мм, вам нужно только разделить его на 25,4. Представьте, что я хочу выразить 1785 миллиметров в дюймах; тогда
Наш калькулятор мм предлагает широкий спектр возможностей, как вы, возможно, уже видели: Вы можете изменить миллиметры на м, см, км, дюймы, футы, ярды, мили и другие.
Помимо нашего калькулятора мм, здесь мы хотим упомянуть другие калькуляторы расстояний, которые могут оказаться полезными:
Преобразователь длины
Преобразователь расстояния
Преобразователь высоты
Метрическая система в дюймы
Калькулятор футов и дюймов
Переходник на дюймы
Миллиметровый калькулятор
калькулятор
см в м
см в дюйм конвертер
Конвертер футов в мили
конвертер футов в метры
Калькулятор дюймов в метры
конвертер дюймов в см
Конвертер метров в футы
конвертер
м в ft
Калькулятор сантиметров
Калькулятор километров
FAQ
Что такое 1000 метра?
Тысячная метра равна 0,001 м, неудобное значение из-за десятичной части. Таким образом, мы называем выразить его в миллиметрах. Тысячная метра равна 1 мм.
Сколько 3/8 дюйма в мм?
9,525 мм. Вот как мы пришли к этому ответу:
Разделите числитель на знаменатель. Это 0,375 .
Умножьте результаты на коэффициент преобразования дюймов в миллиметры: 25,4 .
Наслаждайтесь измерением расстояния в имперской системе веса.
Arturo Barrantes
Метрическая система
Imperial/US
Ознакомьтесь с 224 похожими калькуляторами преобразования ваш необходимый метрический конвертер
Миллиметры
Аббревиатура/символ:
мм
мил (неформальный)
Единица измерения:
Длина0
использовать:
Миллиметр как часть метрической системы, используется в качестве меры длины по всему миру. Наиболее заметным исключением являются Соединенные Штаты, где имперская система все еще используется для большинства целей.
Определение:
Миллиметр — единица длины в метрической системе, эквивалентная одной тысячной метра (основная единица длины в системе СИ).
Один метр был определен в 1983 году на 17-й конференции мер и весов как «длина пути, проходимого светом в вакууме за интервал времени 1/299 792 458 секунды», а миллиметр по определению получается как составляет 1/1000 от этого значения.
Происхождение:
Джон Уилкинс впервые предложил длину «секундного маятника» в качестве универсального измерения, т. е. измерения, которое можно было бы выполнить, чтобы избежать определения относительно хранимой эталонной единицы. Он думал, что маятник, совершающий полколебания в секунду, будет иметь фиксированную длину. Он был почти прав, но позже выяснилось, что эта длина немного различается по всему миру. Из-за этой изменчивости Академия наук разработала новую меру, равную 1/10000000 расстояния от экватора до Северного полюса, измеренного по меридиану через Париж. Это измерение было использовано для создания международного прототипа счетчика — металлического стержня, хранящегося в штаб-квартире BIPM. Со временем от этого стандарта отказались в пользу более точных измерений – впервые в 19 в.60 11-я конференция мер и весов определила метр как «1,650763,73 длины волны оранжево-красной эмиссионной линии атома криптона-86 (в вакууме)». Наконец, в 1983 году 17-я конференция определила метр как «расстояние, пройденное светом в вакууме за 1/299792458 секунды», что, следовательно, приводит к определению миллиметра как расстояния, пройденного светом в вакууме за 1/299792458000 секунды. Второй.
Общие ссылки:
В одном дюйме 25,4 миллиметра.
Диаметр головки булавки составляет приблизительно 2 мм.
Толщина компакт-диска примерно 1,2 мм.
Модели железных дорог колеи 00 имеют расстояние между рельсами 16,5 мм.
Машинки для стрижки волос класса 1 состригают волосы примерно до 3 мм в длину (класс 2 срезает до 6 мм, класс 3 до 9 мм и т. д.)
Тонкий человеческий волос имеет ширину примерно 0,04 мм
Средняя спичка имеет ширину примерно 2 мм
Батарейка AA может иметь длину от 49,2 до 50,5 мм от ее плоского конца до конца кнопки батареи
Контекст использования:
Миллиметры используются в качестве стандартной меры длины во всех видах инженерных и коммерческих приложений где требуется точность больше ближайшего сантиметра.
Там, где необходимо измерить или выразить еще большую точность, доли миллиметра используются до трех знаков после запятой.
Миллиметры обычно используются для описания калибра малых боеприпасов и оружия, используемого для их стрельбы, например «Узи-9».штурмовая винтовка мм.
Единицы измерения:
1/1000 мм = один микрометр
1/1000000 мм = один нанометр
Кроме того, постепенно уменьшающиеся единицы включают пикометр, фемтректометр, аттометр и зептометр.
Кратность:
Существует множество единиц для выражения кратности миллиметра, но они определяются их отношением к метру (базовой единице длины СИ), а не к миллиметру.
Садовый центр Репейник — Условные обозначения размеров растений
Р (pot) – саженец в горшке. Горшком считается емкость объемом до 2 л, в том числе квадратная. Размер горшка обозначается цифрой, соответствующей его диаметру (длине стенки по верхней грани): так, например, P11 – горшок диаметром 11 см. Иногда диаметр горшка обозначают буквой D. Самый распространенный формат горшка – Р9.
С (container) – растение в контейнере. Объем контейнера – от 2 л. Именно объем и выделяется как основная характеристика: С3 – контейнер объемом 3 литра. Форма контейнеров чаще всего круглая.
WRB (wire root ball) – обозначает саженец, корневая система которого сформирована в земляной ком и упакована в мешковину и металлическую неоцинкованную проволочную сетку.
BR (bare root) — открытая корневая система. Нередко ее обозначают аббревиатурой ОКС.
RB (root ball) – растение с земляным комом, обернутым мешковиной. Цифрами (при наличии) обозначается диаметр кома: RB60 – ком в мешковине, диаметр 60 см.
RB/C – растение, пересаженное из грунта в контейнер и не успевшее укорениться.
SB (soft bag) — растение с земляным комом в мягком контейнере или сумке.
Способ формирования кроны
(для деревьев и некоторых кустарников)
St (stem tree) – штамбовое дерево, то есть имеющее прямой ровный ствол, от которого на определенной высоте начинают отходить скелетные ветви. Обязательно должна быть указана высота штамба, измеренная от корневой шейки до первой скелетной ветви: St 100 – дерево с высотой штамба 100 см.
Размеры растения
У деревьев указываются высота растения и/или охват ствола, все значения приводятся в сантиметрах. Высота чаще всего дается не в абсолютном значении, а в некотором диапазоне, например, 60-80 см, 100-125, 250-300 см и т. д, так как измерить каждый саженец в отдельности не представляется возможным. Охват ствола также указывается в диапазоне, например, 8-10. В конечном счете характеристики размеров дерева могут выглядеть так: «250 – 300, 8-10», где первое значение – высота, второе – охват ствола. Молодые штамбовые деревья с диаметром ствола менее 6 см могут иметь только одну характеристику – высоту, у более взрослых саженцев указываются оба параметра.
У кустарников указывают высоту или длину веток, для солитеров может вводиться и параметр ширины.
У хвойных. Для карликовых хвойных часто бывает достаточно только указания ширины, для среднерослых желательны ширина и высота. Сильнорослые колонновидные хвойные могут характеризоваться только высотой, сильнорослые с широкой кроной – высотой и шириной. Размеры хвойных измеряются от корневой шейки до середины прироста текущего года.
Возраст саженца
Его указывают далеко не всегда и в основном для плодовых деревьев. При этом один сезон выращивания приравнивается к одному году. Возраст привитых саженцев отсчитывается по возрасту привоя, а не подвоя; у многоствольных деревьев – по возрасту главного ствола.
Южный федеральный университет | Пресс-центр: Самый сложный язык с самой простой грамматикой: Эксперты ЮФУ рассказали о возможностях изучения китайского
Ежегодно 20 апреля отмечается День китайского языка. Китайский язык в качестве родного используют около 1,4 миллиарда человек. При такой распространенности языка, желающих его выучить становится больше с каждым годом. Откуда возникает живой интерес к китайскому среди студентов и когда стоит начинать общаться с носителем языка поделились эксперты Южного федерального университета.
Китайский является древним языком, на котором сегодня говорит около полутора миллиардов человек. Для неподготовленного человека текст или речь на китайском могут показаться чем-то невероятно сложным, но это не так. Основное отличие китайского языка от русского – это иероглифы, как отмечает Чжан Цзинвэй, аспирант Института математики, механики и компьютерных наук ЮФУ, доверенный представитель и посол ЮФУ в Китае.
«Иероглиф может обозначать как отдельный звук или слог, так и целое слово, поэтому для него в данном случае характерны черты семантического метода коммуникации, при котором такой иероглиф является элементом визуального текста и обладает свойством неделимости.Проще говоря, в русском языке слово состоит из букв русского алфавита, а в китайском такое же слово может обозначать один или несколько иероглифов, каждый из которых имеет свое значение, но вместе они могут обозначать что-то определенное. Для понимания сути иероглифов достаточно посмотреть на экран своего смартфона, где каждое приложение обозначается своей иконкой и даже без текста под ней человек понимает, что эта иконка обозначает. Более того, при знании достаточного количества иероглифов, человек может понять значение даже незнакомого ему слова, просто сопоставив значения иероглифов, из которых оно состоит. Все это невероятно упрощает скорость восприятия текста, записанного иероглифами».
Несмотря на сложность восприятия особенностей китайского языка русскоговорящими людьми, китайский язык становится всё более популярным для изучения. На сегодняшний день заметен устойчивый рост интереса к изучению китайского языка, как среди школьников и студентов, так и среди взрослых. И если еще несколько лет назад таким спросом пользовался английский язык, то сейчас его в негласной гонке догоняет китайский.
Почему возникает такой живой интерес рассуждает Алина Болотова, преподаватель Департамента восточных языков и культур ЮФУ:
«В первую очередь, спрос на изучение китайского языка связан с укреплением российско-китайских отношений, что влечет за собой появление новых возможностей для изучения языка, как внутри страны, так и за её пределами. Увеличивается количество стипендий, стажировок и возможностей обучения в самом Китае. Просмотреть тенденцию на спрос китайского языка очень просто. Если вернуться на 5 лет назад, мы увидим, что, конечно, и тогда о китайском языке знали и его изучали. Но в первую очередь в крупных лингвистических центрах — Москве, Санкт-Петербурге, на Дальнем Востоке. В Ростове-на-Дону этот язык также преподавался, но не пользовался таким большим спросом, поэтому и возможностей для изучения было мало. В последние 3 года появилась тенденция к изучению языка не только в Ростове, но и Ростовской области, а также вузах, где ранее язык не преподавался».
Одной из причин популярности языка становится также необходимость бóльшего количества специалистов со знанием китайского языка в различных областях. Как заметил Чжан Цзинвэй, российский студент со знанием китайского языка после получения высшего образования может найти высокооплачиваемую работу и построить карьеру в сфере российско-китайского сотрудничества, в том числе торгово-промышленной и медицинской сфере.
С появлением спроса рождаются и новые возможности для изучения перспективного языка, который может стать фундаментом для успешного будущего.
«В Ростове-на-Дону изучение китайского языка доступно в первую очередь для студентов крупных вузов города. — отмечает Алина Болотова. В Институте филологии, журналистики и межкультурной коммуникации ЮФУ реализуются программы бакалавриата по специальности “Зарубежная филология” с первым, вторым или третьим языком для изучения – китайским. На направлении “Лингвистика” китайский доступен в качестве второго иностранного языка».
Если китайский язык не является частью общеобразовательной программы, то изучать его можно на дополнительных курсах. Так Институт филологии, журналистики и межкультурной коммуникации предлагает программу изучения китайского от нуля до уровня B2, после которого совершенствовать знания языка можно уже самостоятельно. Курсы рассчитаны уже не только на студентов, но и на школьников, взрослых слушателей, окончивших университет.
Также эксперт поделилась, что на базе Института функционирует Клуб китайской культуры. В нем проходят встречи, как на русском, так и на китайском языке. В разговорном клубе можно пообщаться с носителями китайского языка, а также практиковать свои навыки вместе с преподавателями.
О других возможностях изучения китайского языка в специальных школах рассказывает и Чжан Цзинвэй:
«Так как по основному направлению работы я занимаюсь межвузовским сотрудничеством, в частности, обучением российских студентов в Китае, при нашей организации – Центре Евроазиатского Гуманитарного Сотрудничества «Один Путь» открыта языковая школа, где всех желающих профессионально обучают китайскому языку для общего развития, работы, либо для отъезда в Китай на обучение в китайских высших учебных заведениях. Помимо взрослых людей, в языковой школе обучается и значительное количество детей».
Таким образом, препятствий для освоения китайского языка практически нет. Дальнейший успех в изучении языка зависит лишь от собственного стремления и желания освоить новое. Хотя сложившиеся мнение о сложности китайского языка многих до сих пор пугает, эксперты дают несколько советов и развенчивают мифы о том, что китайский — это трудно.
Алина Болотова советует начинать изучать китайский язык не с носителем языка.
«Многие считают, что изучение языка с носителем принесет больше успеха, чем с русскоязычным преподавателем. Однако, это не так. Роль носителя языка важна, но пройти начальный путь от А1 до В1 лучше именно с русскоязычным наставником. Использовать носителя языка в изучении китайского лучше, когда Вы уже освоили базовые правила иероглифики, грамматики и правил китайского языка».
Чжан Цзинвэй подчеркивает, что китайский язык действительно непростой для русскоязычных людей, но после начала его изучения и понимания того, как он устроен, скорость обучения возрастает.
«У меня много знакомых, которые, начиная с нулевого уровня, всего за два года успешно сдавали экзамен на знание китайского – HSK (прим. 汉语水平考试, пиньинь Hànyǔ Shuǐpíng Kǎoshì; палл. Ханьюй Шуйпин Каоши — стандартизированный квалификационный экзамен по китайскому языку) вплоть до 4-5 уровня. Знание китайского на 5-м уровне HSK позволяет поехать на обучение в китайские университеты. Существует множество учебников и методик по изучению китайского, но среди них нет никаких «волшебных» методов, все в большей мере зависит только от ученика и его усердия», – подытожил и вдохновил эксперт.
Автор текста: Тамара Картамышева
США Разметка дорожного покрытия: разметка для двустороннего движения Подробное описание
Услуги
> Публикации > Разметка дорожного покрытия
Двухполосные проезжие части
На рисунке «Двухполосные проезжие части» показано, что Обгон разрешен — это двусторонняя разметка, обгон которой разрешен в обоих направлениях. показано с обозначением осевой линии пунктирной желтой линией Стрелки показывают, что направление движения — одна полоса в каждом направлении.
Запрещенные зоны и граничные линии — двусторонняя маркировка с запретными зонами. Двухполосная проезжая часть показана осевой линией (сверху вниз на рисунке): одинарной прерывистой желтой линией; сплошная желтая линия, примыкающая к левой полосе движения, и желтая прерывистая линия, примыкающая к правой полосе движения; двойная сплошная желтая линия; желтая прерывистая линия, примыкающая к левой полосе движения, и сплошная желтая линия, примыкающая к правой полосе движения; и одна прерывистая желтая линия. В середине рисунка каждый участок сплошной желтой линии накладывается на участок, имеющий двойную сплошную желтую линию. Сплошная белая линия отмечена на внешнем краю каждой дорожки. Стрелки показывают, что направление движения — по одной полосе в каждом направлении.
Легенда показывает черную стрелку, указывающую направление движения по полосам.
Многополосные дороги
На рисунке «Многополосные дороги» показана Без полос для левого поворота показана четырехполосная дорога. Стрелки показывают, что направление движения составляет две полосы в каждом направлении. Проезжая часть имеет осевую разметку сплошной двойной желтой линией. Белая прерывистая линия разделяет полосы движения в одном направлении.
Разрезанные полосы для левого поворота — пятиполосная проезжая часть, где пятая, центральная полоса используется для левых поворотов. Стрелки показывают, что направление движения — две сквозные полосы в каждом направлении и повороты налево от центральной полосы. Проезжая часть имеет разметку в виде сплошной двойной желтой линии и чередующихся каналов для левого поворота, отмеченных сплошной белой линией, чтобы отделить полосу поворота от полос движения, движущихся в том же направлении. Полосы поворота имеют необязательные белые стрелки для левого поворота, отмеченные на тротуаре. Ломаная белая линия разделяет полосы движения в одном направлении.
Полоса поворота налево с двусторонним движением В центре показана вертикальная пятиполосная проезжая часть. Черные стрелки показывают направление движения на юг по двум левым полосам и на север по двум правым полосам. Пятая полоса находится в центре. Сплошная белая линия отмечена на правом краю каждой стороны проезжей части. По всей длине рисунка (за исключением перекрестков) прерывистая белая линия разделяет две сквозные полосы движения на юг, а прерывистая белая линия разделяет две сквозные полосы движения на север.
В верхней части рисунка самая внутренняя сквозная полоса в южном направлении отделена от центральной полосы сплошной желтой линией. Ломаная желтая линия проходит к востоку от него прямо внутри центральной полосы. Еще одна прерывистая желтая линия находится на восточной стороне центральной полосы, рядом со сплошной желтой линией, отделяющей ее от самой внутренней сквозной полосы движения в северном направлении.
Горизонтальная улица пересекает вертикальную проезжую часть. К югу от этого перекрестка разметка, разделяющая каждую из полос движения, продолжается по той же схеме, что и к северу от перекрестка. На центральной полосе показана белая стрелка левого поворота, изгибающаяся на юг и восток. Сразу за ним показана еще одна белая стрелка левого поворота, изгибающаяся на север и запад.
К югу от этих стрелок желтые прерывистые линии на центральной полосе не показаны. После небольшого расстояния вторая сплошная желтая линия показана рядом со сплошной желтой линией, разделяющей центральную полосу и самую внутреннюю сквозную полосу движения в северном направлении. За этой точкой показана сплошная белая линия, разделяющая центральную и самую внутреннюю полосу движения на юг, а на центральной полосе показана белая стрелка левого поворота, изгибающаяся на юг и восток.
Прямо под стрелкой левого поворота показано пересечение вертикальной дороги с горизонтальной улицей. К югу от этого перекрестка на центральной полосе показана еще одна белая стрелка левого поворота, изгибающаяся на север и запад. К югу от перекрестка сплошная двойная желтая линия разделяет центр и самую внутреннюю полосу движения на юг, а сплошная одиночная белая линия разделяет центр и самую внутреннюю полосу движения на север.
Легенда показывает черную стрелку, указывающую направление движения по полосам.
Трехполосные проезжие части
На рисунке «Трехполосные проезжие части» показано Разрешено движение в одном направлении — это двусторонняя разметка, разрешенное движение в направлении одной полосы. Трехполосная дорога показана стрелками, указывающими направление движения: одна полоса движется на юг, а две полосы — на север. Ломаная желтая линия показана рядом с полосой движения на юг, а сплошная желтая линия показана рядом с крайней левой из двух полос движения на север. Показана прерывистая белая линия, разделяющая две полосы движения на север. Сплошная белая линия показана на внешнем краю полосы движения на юг и самой правой полосы движения на север.
Обгон запрещен в направлении с одной полосой — это двусторонняя разметка с запретом обгона в однополосном направлении». две полосы, ведущие на север. Показана сплошная двойная желтая линия, отделяющая полосу движения на юг от крайней левой полосы движения на север. Показана прерывистая белая линия, разделяющая две полосы движения на север. Сплошная белая линия показана на внешнем краю полосы движения на юг и на крайний правый северный переулок
Изменение направления движения в центральной полосе показана вертикальная трехполосная дорога. Показана сплошная двойная желтая линия, отделяющая каждую полосу движения от других. Две полосы движения в южном направлении показаны переходящими в одну полосу. Показана сплошная двойная желтая линия, отделяющая каждую полосу движения от других. Сплошная двойная желтая линия показана рядом с полосой движения в южном направлении. Снизу рисунка показаны две полосы движения на север, переходящие в одну полосу. Сплошная желтая линия показана рядом с полосой движения в северном направлении на этом конусе. На конусе показана буферная зона в конце полосы движения на юг и на север.
Реверсивная центральная полоса представляет собой вертикальную трехполосную дорогу с двусторонним движением. Стрелки показывают, что направление движения по левой полосе — на юг, по правой полосе — на север, а по центральной полосе может быть любое направление. Показаны прерывистые двойные желтые линии, отделяющие полосы друг от друга. Легенда показывает черную стрелку, указывающую направление движения по полосам.
Назад к разметке двустороннего движения
NWS JetStream — Origin of Wind
Ветер — это просто воздух в движении. Обычно в метеорологии, когда мы говорим о ветре, нас интересуют его горизонтальная скорость и направление. Например, если вы слышите сообщение о западном ветре со скоростью 15 миль в час (24 км/ч), это означает, что горизонтальные ветры будут дуть с запада с такой скоростью.
Высокое и низкое давление обозначаются линиями одинакового давления, называемыми изобарами.
Хотя на самом деле мы не можем видеть движение воздуха, мы можем измерить его движение по силе, действующей на объекты. Мы используем флюгер, чтобы указать направление ветра, и анемометр, чтобы измерить скорость ветра. Но и без этих инструментов мы можем определить направление.
Например, флаг указывает направление, противоположное ветру. Ветер дует листья в противоположном направлении, откуда дует ветер. Самолеты, взлетающие и приземляющиеся в аэропортах, будут лететь по направлению ветра.
Вертикальное направление движения ветра обычно очень мало (за исключением грозовых восходящих потоков) по сравнению с горизонтальной составляющей, но оно очень важно для определения повседневной погоды. Поднимающийся воздух охлаждается, часто до насыщения, и может привести к облакам и осадкам. Опускающийся воздух нагревается, вызывая испарение облаков и, следовательно, ясную погоду.
Высокое и низкое давление обозначены линиями одинакового давления, называемыми изобарами.
Вы, наверное, видели карты погоды, отмеченные буквами H и L, которые обозначают центры высокого и низкого давления. Обычно эти «максимумы» и «минимумы» окружают линии, называемые изобарами. «Изо» означает «равный», а «бар» — это единица давления, поэтому изобара означает «равное давление». Таким образом, везде вдоль каждой линии давление имеет одинаковое значение.
Сила градиента давления распространяется от высокого давления к низкому давлению.
В системах высокого давления значение давления воздуха вдоль каждой изобары увеличивается к центру с каждой концентрической линией. Противоположное верно для систем низкого давления, поскольку каждая концентрическая линия к центру представляет более низкое давление. Изобары могут быть близко друг к другу или далеко друг от друга.
Чем ближе сближаются изобары, тем быстрее меняется атмосферное давление. Это изменение давления воздуха называется «градиентом давления». Градиент давления — это просто разница давлений между областями высокого и низкого давления.
Скорость ветра прямо пропорциональна градиенту давления, а это означает, что по мере увеличения изменения давления (т. е. увеличения градиента давления) скорость ветра в этом месте также увеличивается.
Также обратите внимание, что направление ветра (желтые стрелки) — по часовой стрелке вокруг системы высокого давления и против часовой стрелки вокруг системы низкого давления. Кроме того, направление ветра немного пересекает изобары, от центра системы высокого давления к центру системы низкого давления.
Почему это происходит? Чтобы понять, нам нужно изучить силы, управляющие ветром. Есть три силы, которые заставляют ветер двигаться так, как он это делает. Все три силы работают одновременно.
Сила градиента давления распространяется от высокого давления к низкому
Сила градиента давления (Pgf) — это сила, которая пытается уравнять разницу давлений. Это сила, которая заставляет высокое давление подталкивать воздух к низкому давлению. Таким образом, воздух будет течь от высокого давления к низкому, если сила градиента давления будет единственной силой, действующей на него.
Как действует сила Кориолиса на вращающийся диск.
Однако из-за вращения Земли существует вторая сила, Сила Кориолиса , влияющая на направление потока ветра. Названная в честь Гюстава-Гаспара Кориолиса, французского ученого, описавшего ее математически в 1835 году, эта сила заставляет объекты в северном полушарии поворачиваться вправо, а объекты в южном полушарии — влево.
Как действует сила Корилуа на Земле.
Один из способов увидеть эту силу в действии — посмотреть, что происходит, когда прямая линия становится кривой. Представьте Землю в виде поворотного круга (см. номер 1), вращающегося против часовой стрелки. Линейка помещается над поворотным столом (см. номер 2), и карандаш будет двигаться по прямой линии от центра к краю, в то время как поворотный стол вращается под ним. В результате получается изогнутая линия на проигрывателе (см. номер 3).
Если смотреть из космоса, ветер движется прямолинейно. Однако, если смотреть с Земли, воздух (а также другие предметы в полете, такие как самолеты и птицы) отклоняется вправо в северном полушарии (красная стрелка на изображении справа). Сочетание двух сил заставит ветер дуть параллельно прямым изобарам с высоким давлением справа.
Так почему же воздух движется по спирали от максимумов к минимумам? Есть еще одна сила, называемая трением , которая является последней составляющей, определяющей поток ветра. Поверхность земли шероховатая, и это не только замедляет ветер, но также вызывает расходящиеся ветры с возвышенностей и сходящиеся ветры вблизи низов.
Воздушный поток вокруг максимумов и минимумов.
Что происходит со сходящимися ветрами вблизи низины? Свойство, называемое непрерывностью массы, утверждает, что масса не может быть создана или уничтожена в данной области . Таким образом, воздух не может «скапливаться» в данном месте.
Воздушный поток вокруг максимумов и минимумов.
Он должен куда-то идти, поэтому вынужден подняться. По мере подъема охлаждается. Когда воздух охлаждается, конденсация начинает превышать испарение, поэтому невидимый пар конденсируется, образуя облака, а затем и осадки.
Функция — округление x в меньшую сторону (пример floor(4.5)==4.0)
ceiling(x)
Функция — округление x в большую сторону (пример ceiling(4.5)==5.0)
sign(x)
Функция — Знак x
erf(x)
Функция ошибок (или интеграл вероятности)
laplace(x)
Функция Лапласа
asech(x)
Функция — гиперболический арксеканс от x
csch(x)
Функция — гиперболический косеканс от x
sech(x)
Функция — гиперболический секанс от x
acsch(x)
Функция — гиперболический арккосеканс от x
Постоянные:
pi
Число «Пи», которое примерно равно ~3. 14159..
e
Число e — основание натурального логарифма, примерно равно ~2,7183..
i
Комплексная единица
oo
Символ бесконечности — знак для бесконечности
Двойной интеграл в полярных координатах
Алгоритм вычисления двойных интегралов при переходе к полярным координатам детально приведен как в настоящей статье, так и предыдущих публикациях с теорией. Для перехода к полярным координатам нужно найти якобиан, который несколько раз здесь повторим. Дальше сами уравнения кривых, которые ограничивают область интегрирования следует также перевести в полярные координаты. В теории все хорошо описано и выглядит понятным, однако на практике во многих студентов возникают трудности и немало вопросов, поэтому внимательно пересмотрите приведенные дальше решения.
Пример 2.1 Вычислить двойной интеграл, используя полярные координаты:
Решение: Построим область интегрирования ограниченную кривыми -3≤x≤3 Эти кривые записываем из пределов интегрирования, внимательно пересмотрите в каких пределах изменяются «икс» и «игрек». Нижний предел по оси «игреков» приведем к каноническому виду
x2+y2=9. Получили уравнение круга с центром в точке O(0;0) и радиусом 3 (нижняя половина).
Перейдем к полярной системе координат с помощью превращения координат:
найдем якобиан перехода:
Найдем подынтегральную функцию в полярных координатах:
Внимательно пересмотрите формулы двойного синуса, косинуса и им подобных. Они достаточно часто встречаются при упрощении подынтегральных функций, все сделано умышленно для того, чтобы Вы без проблем могли интегрировать. Запишем пределы интегрирования в полярной системе координат: 0≤r≤3, π≤φ≤2 π. Вычислим двойной интеграл:
Поскольку переменные разделены, то интегрирование не тяжелое, достаточно воспользоваться табличными интегралами и подставить пределы.
Пример 2.2 Найти двойной интеграл, используя полярные координаты:
Решение: Из интеграла выписываем область интегрирования 0≤x≤1 Она ограничена прямыми, которые совпадают с-осями координат , y2=12-x2,x2+y2=12 — дуга круга в I четверти.
Получили круг с центром в точке O(0;0) и радиусом r=1 (верхняя половина). Якобиан перехода к ПСК I=r. Запишем подынтегральную функцию в полярной системе координат:
Для круговых областей не трудно записать пределы интегрирования при переходе к полярной системе координат: 0≤r≤1, 0≤φ≤π/2. Находим двойной интеграл:
В результате интегрирования в ответе получили выражение которое содержит логарифм двойки, и число Пи.
Пример 2.3 Вычислить значение двойного интеграла, перейдя к полярным координатам:
Решение: Выпишем область интегрирования, которая ограничена кривыми — 2≤x≤2, По «игреку» имеем ограничения ветками круга , y2=4-x2, x2+y2=22 с центром в начале координат O(0;0) и радиусом 2.
Перейдем к полярной системе координат: якобиан переходу: I=r. С учетом формул перехода подынтегральная функция в полярной системе координат примет вид корневой зависимости:
Пределы интегрирования в ПСК следующие: 0≤r≤2, 0≤φ≤2π. Переходим от двойного интеграла в декартовых координатах к двойному в полярных координатах и находим его значение:
Интеграл равен 16π/3.
Пример 2.4 Найти двойной интеграл, используя полярные координаты:
D: {x2+y2=π2/9; x2+y2=π2/4}. Решение: Выпишем область интегрирования ограниченную кривыми Первая кривая x2+y2=π2/9 — круг с центром в начале координат O(0;0) и радиусом π/3; второе уравнение описывает x2+y2=π2/4 — больший круг с центром в той же точке O(0;0) и радиусом π/2. Область между кругами образует кольцо, по которому выполняем интегрирование.
Найдем подынтегральную функцию в полярной СК:
Круги в полярной системе координат можно задать радиусами и центрами: , отсюда r= π/3; , имеем r= π/2. Пределы интегрирования в полярной системе координат следующие: π/3≤r≤π/2, 0≤φ≤2π. Выполняем вычисление двойного интеграла:
Переход к полярной СК значительно упрощает вычисление интегралов для круговых и кольцевых областей.
Пример 2.5 Найти двойной интеграл, используя полярные координаты:
D: {x2+y2— 2y=0; x2+y2— 4y=0}. Решение: На основе предыдущих примеров делаем вывод, что область интегрирования, ограниченная x2+(y-1)2=1 — кругом с центром в точке O(0;1) и радиусом 1; Вторая кривая x2+(y-2)2=2- круг с центром в точке O(0;2) и радиусом 2. Графически они формируют следующую область интегрирования.
Переходим к полярной системе координат с помощью якобиана перехода I=r. Дальше записываем кривые в полярной системе координат:
расставляем корректные пределы интегрирования: 2sin(φ)≤r≤4sin(φ), 0≤φ≤2π. Вычисляем двойной интеграл в полярной СК:
Нахождение двойных интегралов не тяжелое занятие, если часто самостоятельно практиковать и иметь перед собой таблицу основных интегралов. Все остальные манипуляции не тяжелые и их Вы повсюду в математике выполняете. Дальше рассмотрим еще несколько примеров на вычисление двойных интегралов в полярных координатах.
Калькулятор двойного интеграла с шагами (прямоугольный и полярный)
Выберите тип координат, который вы будете использовать для вычисления двойного интеграла: Выберите параметр «Прямоугольный», чтобы вычислить двойной интеграл по прямоугольным областям, или выберите параметр «Полярный», чтобы вычислить двойные интегралы в полярных координатах.
Выберите дифференциал интегрирования: если вы выбрали прямоугольные координаты, у вас есть два выпадающих списка для этого. В случае, если вы выбрали полярные координаты, дифференциал интегрирования будет равен rdrdt , где переменная t относится к греческой букве тета.
Введите в калькулятор функцию, которая будет подынтегральной функцией двойного интеграла. Для этого следует иметь в виду таблицу допустимых функций, представленную в этом разделе.
Затем введите пределы интегрирования, которые могут быть числовыми или математическими выражениями, использующими переменные, присутствующие в дифференциале интегрирования. Обратите внимание, что для ввода числа пи необходимо написать пи и если вы хотите написать ∞ вы должны написать inf .
Выберите точность десятичных разрядов.
Наконец, нажмите кнопку «Рассчитать», чтобы получить результат. Решение будет развернуто автоматически, показывая этапы процесса интеграции.
Для просмотра примеров двойных интегралов нажмите кнопку «Примеры».
Для обозначения мнимой составляющей комплексного числа.
инф
∞
Калькулятор двойных интегралов с шагами и решателем
Онлайн-калькулятор двойных интегралов с бесплатными шагами поможет вам решить задачи двумерного интегрирования с функциями двух переменных. Вычисление двух последовательных интегралов позволяет вычислить площади функций с двумя переменными для интегрирования по заданным интервалам. Здесь вы можете научиться решать двойные интегралы и многое другое! 9n_{j = 1} f(y_{ij}, x_{ij})△A \). В основном используется для определения области поверхности двухмерной фигуры, которую дарит «∫∫». Двойным интегрированием можно найти площадь прямоугольной области. Если вы хорошо разбираетесь в простой интеграции, то вам будет очень легко решать задачи двойной интеграции. Итак, начнем с некоторых основных правил двойной интеграции.
Правило двойного интегрирования:
Здесь мы обсудим некоторые важные формулы и правила, которые используются калькулятором двойного интеграла по области для выполнения двойного интегрирования. Для решения задач интеграции вы должны изучить различные методы, такие как интегрирование подстановками и интегрирование по частям или формулам. В двойных интегралах правило двойного интегрирования по частям упоминается ниже и также учитывается этим лучшим решателем двойного интегрирования при выполнении вычислений. 9b f (x, y) dx . dy $$
$$ ∫∫( f(x, y) ± g (x, y)) dA = ∫∫ g (x,y) ± dA ∫∫ f(x, y) dA $$
Если f(x, y) < g(x, y), то ∫∫g (x, y) dA > ∫∫ f(x, y) dA
$$ k ∫∫ f (x, y) . dA = ∫∫ k. f (х, у). dA $$
$$ ∫∫ R ∪ S f (x, y) . dA = ∫∫ R f (x, y). dA + ∫∫ sf (x, y). dA $$
Площадь двойного интеграла:
Когда нам нужно найти двойное интегрирование переменной M, пусть M = f(x, y) определяется по области K в плане xy. Если мы найдем конечные точки для x и y как границы области и разделим определенную область на вертикальные полосы, то мы используем формулу: 9{r_2} _{r_1} f (r, θ) dθ, dr $$
Сначала мы должны проинтегрировать f(θ, r) по r в пределах \( r_1 и r_2 \), где θ является постоянным, и интегрируем полученное уравнение как θ от \( θ_1 до θ_2, \text {где } r_1 и r_2 \) являются постоянными. А для решения таких вопросов также можно воспользоваться онлайн-калькулятором двойного интеграла в полярных координатах. 2 + xy с предельными значениями (0, 1) для переменных x и y. 92 + 3 года) / 12 + константа $$
Помимо ручных вычислений, которые кажутся достаточно сложными, вы должны перепроверить и ускорить свои вычисления с помощью этого итерированного интегрального калькулятора с шагами.
Однако онлайн-калькулятор тройного интеграла поможет вам найти значения тройного интеграла заданной функции.
Как работает калькулятор двойных интегралов с шагами?
Онлайн-решатель двойных интегралов определяет двойной интеграл заданной функции с пределами x и y, выполнив следующие шаги:
Ввод:
Сначала введите функцию для интегрирования и выберите интервалы из раскрывающегося списка.
Если вы знаете пределы, выберите определенные значения и подставьте определенные значения для верхнего и нижнего пределов.
С другой стороны, если вы не знаете предельных значений определенной функции, выберите неопределенное.
Нажмите кнопку «Вычислить двойной интеграл».
Вывод:
Калькулятор двойных интегралов отображает определенный и неопределенный двойной интеграл с шагами относительно заданной функции с исчерпывающими вычислениями.
Часто задаваемые вопросы: Каково применение двойного интеграла?
Используется для определения площади области, ограниченной кривой конкретной функции.
В основном используется для нахождения подповерхностного объема.
Двойные интегралы используются для вычисления среднего значения функции двух переменных.
Влияет ли порядок на двойную интеграцию?
Обычно порядок двойного интеграла не имеет значения. Если важно, то следует переписать повторный интеграл при изменении порядка интегрирования.
Можно ли разделить двойной интеграл?
Теорема Фубини гласит: «Мы можем разбить двойные интегралы на несколько повторных интегралов». Для получения дополнительной помощи вы можете позволить этому калькулятору теорем Фубини разделить интегралы и отобразить весь сценарий вычислений, связанных с процессом.
Как преобразовать полярный интеграл в декартов интеграл?
Преобразование полярных координат в другую систему осуществляется тремя способами, перечисленными ниже:
Вам необходимо отобразить прямоугольник D в левой плоскости
Кроме того, вам также необходимо сопоставить прямоугольник D с областью D на плоскости (x, y).
Чтобы ускорить преобразование, вы можете позволить этому калькулятору двухполярных интегралов сделать это за вас.
Заключение:
Используйте этот онлайн-калькулятор двойных интегралов шаг за шагом, который предоставляет результирующие значения как для определенных, так и для неопределенных двойных интегралов в любом порядке с использованием системы алгебры. При символическом интегрировании решатель двойных интегралов использует интегральные и алгебраические правила для получения первообразной заданной функции перед применением основной теоремы исчисления для двойного интегрирования.
Обычно узнать решение по онлайн-заявке на кредит наличными можно в течение одного дня. В некоторых случаях банк рассматривает заявку на кредит дольше. Когда решение примут, банк пришлет уведомление.
Как узнать статус заявки на кредит?
Статус заявки на кредит появится через час после ее отправки в приложении Тинькофф и на сайте tinkoff.ru. Чтобы узнать решение банка на сайте tinkoff.ru, проверьте статус заявки, введя мобильный номер, который вы указали при ее оформлении.
Даже если вы еще не стали клиентом Тинькофф, скачайте наше мобильное приложение — в нем удобно оставить заявку на кредит, следить за ее рассмотрением, а потом согласовать предложенные банком условия. Когда кредит одобрят, прямо в приложении можно будет назначить встречу с представителем банка для получения денег.
Также вы можете позвонить в банк по номеру 8 800 555‑77‑78 и спросить робота: «Что с моей заявкой на кредит наличными?»
Кто и как рассматривает заявку на кредит?
Сначала банк проверяет сведения, которые вы указали в заявке. При необходимости наш сотрудник позвонит вам или вашему работодателю, чтобы проверить актуальность этих данных.
Затем на основании этой информации банк устанавливает размер кредита, который готов вам предоставить. Мы свяжемся с вами, чтобы согласовать окончательные условия кредита после одобрения заявки.
Что произойдет после предварительного одобрения заявки?
Если вы сразу не выбрали время и место для доставки кредитного договора и дебетовой карты, сотрудник банка позвонит в течение 1–3 дней, чтобы назначить встречу. Как назначить встречу с представителем или перенести ее
Зачем подтверждать доход через Госуслуги?
Это увеличит шансы на одобрение кредита, а также на то, что банк выдаст всю запрашиваемую сумму.
Процедура подтверждения работает так: на этапе рассмотрения заявки на кредит вам придет СМС от портала госуслуг с просьбой разрешить банку доступ к данным вашего счета в Пенсионном фонде РФ. Если вы согласитесь, мы получим сведения о вашем доходе в виде выписки из Пенсионного фонда, доступ к другой информации останется закрыт.
Это бесплатная услуга, и ваше ответное СМС на номер портала госуслуг тоже будет бесплатным. Но, чтобы всё сработало, у вас должна быть подтвержденная учетная запись на портале госуслуг.
Подтвердить учетную запись на Госуслугах можно прямо в личном кабинете на сайте tinkoff. ru или в мобильном приложении Тинькофф:
При желании вы можете просто проигнорировать сообщение от портала госуслуг, тогда мы продолжим рассмотрение вашей заявки на кредит в стандартном порядке.
Подтверждать доход через Госуслуги не обязательно, но это увеличивает шансы на одобрение кредита
Как я узнаю, какую ставку и сумму кредита мне в итоге одобрят?
Свою ставку и максимальную сумму кредита, которую вам одобрит банк, вы сможете узнать после того, как подадите заявку, — вам позвонит менеджер Тинькофф, чтобы согласовать параметры вашего кредита.
Если у вас уже есть кредит в нашем банке, вы можете посмотреть информацию о нем в приложении Тинькофф и в личном кабинете на сайте tinkoff.ru. Узнать информацию по действующему кредиту
Если переживаете, что в будущем могут возникнуть финансовые трудности, которые помешают спокойно платить по кредиту, подключите дополнительную услугу «Снижение платежа». Она позволяет ненадолго снизить свою долговую нагрузку, чтобы было время разобраться с финансами. Как подключить услугу «Снижение платежа»
Есть проблема, а где решение?
Как оплачивать газ, свет, теплоснабжение и холодную воду, если нет счетчика? А кто-то из прописанных по тем или иным причинам долгое время не проживает по данному адресу. Таких ситуаций достаточно, а четко прописанных правил, как действовать, – нет.
Четыре – по факту, два – в уме
В редакцию обратился А. Абдумуминов из г. Ташкента: «В квартире прописаны 6 человек, но проживают 4. Дочь и сын учатся за рубежом. Как я должен оплачивать услуги газоснабжения, при условии, что у меня нет газового счетчика. Я слышал, что по количеству фактически проживающих. Однако сотрудник райгаза настаивает на том, чтобы я платил по числу прописанных. В Правилах пользования природным газом ответа на этот вопрос не нашел».
Мы адресовали этот вопрос в территориальный филиал газоснабжения АО «Узтрансгаз» по городу Ташкенту. Получили ответ и. о. начальника филиала А. Саидвалиева, в котором он ссылается на старые Правила пользования газом в быту на территории Республики Узбекистан, утвержденные Министерством коммунального обслуживания в 1997 году (рег. МЮ N 370 от 14.10.1997 г., далее – Правила 1997 г.). В них сказано, что при отсутствии прибора учета газа начисление за природный газ производится по тарифу ежемесячно. Периодичность, сроки оплаты, ответственность сторон определяются договором. При выезде с места постоянного жительства на срок более полугода, а также при продаже или сносе жилых домов, принадлежащих гражданам на праве частной собственности, собственники жилых домов и квартир должны уведомить об этом организацию газового хозяйства. Вот, пожалуй, и весь ответ по существу вопроса. При этом возникает множество других.
Прежде всего почему руководитель филиала ссылается на старые Правила 1997 года? По словам сотрудников городской газоснабжающей организации, в новых Правилах пользования природным газом (прил. N 2 к ПКМ N 22 от 12.01.2018 г., далее – Правила 2018 г.) решение этого вопроса не рассматривается. Они составлены с учетом перспективы создания автоматической системы контроля и учета газа (АСКУГ). Но предыдущие Правила 1997 года еще не отменены. В соответствии с Законом «О нормативно-правовых актах» действия представителя газоснабжающей организации не вызывают нареканий.
Правилами 1997 года установлено, что при отсутствии приборов учета расхода газа (газовых счетчиков) использованный газ оплачивается по нормам месячного расхода природного газа на 1 человека, на 1 м2 отапливаемой площади (п. 24).
Но каков порядок представления информации об изменениях числа проживающих? Почему нужно уведомлять, только если жилец выезжает более чем на 6 месяцев? Полгода – это большой срок, и за него набегает солидная сумма. Почему столько лет вопрос остается открытым? Почему на ситуацию не обратили внимания при разработке Правил 2018 года? Если нормотворцы считают решение этого вопроса слишком мелким для такого глобального документа, как Правила, то можно было бы разработать ведомственный акт, регулирующий подобные ситуации. Сделать это не поздно и сейчас. Вопрос будет актуальным как минимум до 2021 года. Предполагается, что к тому времени системой будут охвачены все потребители без исключения. Поэтому газовики должны как можно скорее устранить пробелы в законодательстве.
А как у других?
При решении вопроса газовикам необязательно изобретать велосипед. Полезным может оказаться изучение опыта «коллег по цеху».
В пункте 103 Правил пользования электрической энергией (прил. N 1 к ПКМ N 22) определено: «Бытовой потребитель, не имеющий прибора учета электрической энергии и (или) временно не проживающий на данной жилой площади по каким-либо причинам, обязан письменно известить об этом Бюро и предприятие территориальных электрических сетей для исключения ошибочных начислений за электрическую энергию». Пункт 119 Правил устанавливает, что в случае отсутствия счетчика оплата производится по среднесуточному расходу электрической энергии, и такой расчет не должен превышать одного месяца, в течение которого счетчик должен быть восстановлен.
В Правилах оказания услуг теплоснабжения в многоквартирных домах и Правилах оказания услуг водоснабжения и водоотведения потребителям (прил. NN 1, 2 к ПКМ N 194 от 15.07.2014 г.) также есть решение вопроса. У тепловиков это пункт 110, а у водоснабженцев – пункт 114. Согласно этим нормам при проживании временных жителей (нанимателей) оплата производится полностью за количество фактически проживающих лиц. Потребитель обязан письменно информировать поставщика об увеличении или уменьшении числа граждан, проживающих (в том числе временно) в занимаемом им жилом помещении, не позднее 5 рабочих дней со дня произошедших изменений, – если жилое помещение не оборудовано прибором учета. При этом составляется трехсторонний акт между представителями поставщика, органа самоуправления граждан и владельцем.
Что дальше?
Несмотря на то что у электриков, тепловиков и водоснабженцев, в сравнении с газовиками, Правила более совершенны, они тоже требуют уточнения.
Отсутствие четко прописанных норм нередко приводит к недопониманию и конфликтным ситуациям. Хотя есть немало фактов, когда стороны при обоюдном согласии находят оптимальное решение вопроса.
По Закону «О защите прав потребителей» потребитель оплачивает исключительно те услуги, которые получил. Чтобы подтвердить временное непроживание, можно было бы представлять в райгаз или Бюро принудительного исполнения справку из махаллинского комитета о количестве фактически проживающих по данному адресу. Справка выдается на основе акта, подтверждающего, что прописанный по данному адресу гражданин здесь временно не проживает. Акт составляют домком и несколько соседей. Кстати, многие поставщики коммунальных услуг используют такой механизм за неимением регламента для непроживающих. Эти данные могут быть введены в биллинговую систему и приняты во внимание при взаиморасчетах. В качестве доказательства временного непроживания в спорных вопросах могут служить также копия документа о регистрации граждан, квитанции, подтверждающие оплату газа по месту их фактического проживания, проездные и прочие документы.
В спорных случаях может быть инициировано судебное разбирательство. В качестве доказательства своей правоты потребитель вправе представить любые документы, позволяющие достоверно установить фактическое число проживающих.
Еще один ракурс проблемы с непроживающими связан с установленной Указом Президента «О дополнительных мерах по повышению эффективности деятельности органов прокуратуры в обеспечении исполнения принимаемых нормативно-правовых актов» (N УП-5343 от 15.02.2018 г.) солидарной ответственностью жильцов. Как быть, например, когда не проживающий, но прописанный в данной квартире живет в другом месте (городе) и имеет там временную прописку? Если нет механизма, устанавливающего факт непроживания, могут ли его привлечь к солидарной ответственности по уплате задолженности в двух местах: по месту постоянной и временной прописки?
Думается, эти важные для потребителей вопросы требуют решения.
Олег Гаевой.
Системы линейных уравнений: построение графиков
ОпределенияОсобые случаиЗаменаИсключение/добавлениеИсключение по ГауссуБольше примеров
Purplemath
Когда вы решаете системы уравнений (линейные или другие), вы, с точки зрения графических линий, связанных с уравнениями, находите любые точки пересечения из тех строк.
Если система уравнений состоит только из пары линейных уравнений с двумя переменными, то уравнение этой системы можно изобразить графически; график будет содержать две прямые линии, а решением системы будет точка (точки) пересечения этих линий. Поскольку две прямые линии на плоскости могут быть построены только тремя способами, то для данной системы уравнений существует только три соответствующих формы решения.
Содержание продолжается ниже
MathHelp.com
Решение систем с помощью графиков
Две прямые линии (1) имеют разные наклоны и точки пересечения, поэтому они пересекаются ровно в одной точке, (2) параллельны с разными точками пересечения, поэтому они никогда не пересекаются в любых точках, или (3) они имеют одинаковый наклон и точки пересечения, так что они на самом деле являются одной и той же линией, поэтому они «пересекаются» везде (где «везде» означает «везде, где идет одна линия, идет и другая линия). ; у них есть все свои точки — бесконечно много точек — общих»). Эти три случая для пар прямых показаны ниже:
На первом графике выше, обозначенном как «Случай 1» в левой колонке, показаны две отдельные непараллельные линии, которые пересекаются ровно в одной точке. Соответствующая система уравнений называется «независимой» системой, а решением является одна ( x , y ) точка.
На втором графике выше, обозначенном как «Случай 2» в средней колонке, показаны две отдельные параллельные линии. Поскольку параллельные прямые никогда не пересекаются, то и пересечения этих прямых быть не может; то есть для системы двух линейных уравнений, которая изображается в виде двух параллельных линий, не может быть решения. Это называется «несогласованной» системой уравнений.
На третьем графике выше, обозначенном как «Случай 3» в правой колонке, показана только одна линия. На самом деле, это одна и та же линия, проведенная дважды. Эти «две» линии, на самом деле являющиеся одной и той же линией, «пересекаются» (в техническом смысле) в каждой точке своей длины. Это означает, что каждая точка на прямой(ых) является решением системы. Это называется «зависимой» системой, а «решением» является вся линия.
Это показывает, что система уравнений может иметь одно решение (конкретное x , y -точка), либо вообще нет решения, либо бесконечное решение (являющееся всеми решениями уравнения). У вас никогда не будет системы с двумя линейными уравнениями и двумя переменными с двумя или более решениями; он всегда будет один, ни один или бесконечно много.
Если это зависимая система, то почему «бесконечно» или «все точки» не является правильным ответом?
В то время как решение зависимой системы линейных уравнений представляет собой бесконечный набор точек, «бесконечность» не является числом, «бесконечность» недостаточно ясна, а точек off линия(и) системы не являются решениями. Только те точки, которые действительно лежат на прямой, являются решениями системы. Таким образом, ваш ответ для типа системы будет «зависимым», но решением на самом деле будет уравнение линии, поскольку это уравнение неявно перечисляет все точки, которые решают систему.
Например, если два уравнения в зависимой системе сводятся к y = − x + 3, то вы должны представить решение как линейное уравнение, или вы можете использовать парное обозначение координат; а именно, ( x , − x + 3).
Решение с помощью графика
Вероятно, первым методом решения систем уравнений, который вы увидите, будет «решение с помощью графика». Предупреждение: вы должны относиться к этим проблемам с недоверием. Единственный способ найти решение на графике: , ЕСЛИ , вы рисуете очень аккуратную систему координат, , ЕСЛИ , вы рисуете очень аккуратные линии, , ЕСЛИ , решение оказывается точкой с хорошими аккуратными целочисленными координатами, и IF линии не близки к параллельным.
Например, если линии пересекаются под небольшим углом, практически невозможно сказать, где они пересекаются.
И если точка пересечения не является аккуратной парой целых чисел, все ставки сняты. Я имею в виду, можете ли вы сказать, просто взглянув на…
…что показанный выше перекресток имеет координаты (-4,3, -0,95)? Нет? Тогда вы понимаете мою точку зрения.
С положительной стороны, поскольку они будут вынуждены давать вам красивые и аккуратные решения для «решения с помощью графика», вы сможете получить правильные ответы , если вы рисуете очень аккуратно . Например:
2 x − 3 y = −2 4 x + y = 24
Я знаю, что мне нужен аккуратный график, поэтому я возьму линейку и начну. Сначала я решу каждое уравнение относительно « y =», чтобы легко построить график:
2 x − 3 y = −2 2 x + 2 = 3 y ( 2/3) х + (2/3) = у
4 х + y = 24 y = −4 x + 24
Вторую линию будет легко построить, используя только наклон и точку пересечения, но мне понадобится T-диаграмма для первой линии.
Иногда вы заметите пересечение прямо на Т-диаграмме. Вы видите точку, которая находится в обоих уравнениях выше? Проверьте заштрихованную серым строку выше.
Теперь, когда у меня есть несколько точек, я аккуратно возьму линейку и график и поищу пересечение:
Даже если бы я не заметил точку пересечения на Т-диаграмме, картина.
решение: ( x , y ) = (5, 4)
Если вы застряли в решении с помощью графика, пожалуйста, ради бога, нарисуйте линии так, чтобы они действительно пересекались в точке решения . Не будь неряшливым!
Вы можете использовать приведенный ниже виджет Mathway, чтобы попрактиковаться в решении с помощью графика (или пропустить виджет и перейти к следующей странице). Попробуйте введенное упражнение (щелкнув стрелку и выбрав «Решить с помощью графика» во всплывающем окне) или введите свое собственное упражнение. Затем сравните свой ответ с ответом Мэтуэя. (Или пропустите виджет и продолжите урок.)
Пожалуйста, примите куки-файлы настроек, чтобы включить этот виджет.
(Нажмите здесь, чтобы перейти непосредственно на сайт Mathway, если вы хотите проверить их программное обеспечение или получить дополнительную информацию.)
Понять взаимосвязь между набором решений Ax=0 и набором решений Ax=b.
Поймите разницу между набором решений и диапазоном столбцов.
Рецепты: параметрическая векторная форма, запишите множество решений однородной системы в виде промежутка.
Картинки: набор решений однородной системы, набор решений неоднородной системы, отношения между ними.
Словарный запас: однородный / неоднородный , тривиальное решение .
В этом разделе мы изучим геометрию множества решений любого матричного уравнения Ax=b.
Уравнение Ax=b легче решить, когда b=0, поэтому начнем с этого случая.
Определение
Система линейных уравнений вида Ах=0 называется однородной .
Система линейных уравнений вида Ax=b при bB=0 называется неоднородной .
Однородная система — это просто система линейных уравнений, в которой все константы справа от знака равенства равны нулю.
Однородная система всегда имеет решение x=0. Это называется тривиальным решением . Любое ненулевое решение называется нетривиальным .
Пример (нет нетривиальных решений)
Когда однородное уравнение Ax=0 действительно имеет нетривиальные решения, оказывается, что множество решений удобно выразить в виде интервала.
Форма параметрического вектора (гомогенный случай)
Рассмотрим следующую матрицу в сокращенной ступенчатой форме строк:
А=С10-8-701430000D.
Матричное уравнение Ax=0 соответствует системе уравнений
Tx1-8×3-7×4=0x2+4×3+3×4=0.
Мы можем записать параметрическую форму следующим образом:
GMKMIx1=8×3+7x4x2=-4×3-3x4x3=x3x4=x4.
Мы написали избыточные уравнения x3=x3 и x4=x4, чтобы превратить приведенную выше систему в векторное уравнение :
.
x=EPNx1x2x3x4FQO=x3EPN8-410FQO+x4EPN7-301FQO.
Это векторное уравнение называется параметрический вектор формы набора решений. Поскольку x3 и x4 могут быть любыми, это говорит о том, что набор решений представляет собой набор всех линейных комбинаций EPN8-410FQO и EPN7-301FQO. Другими словами, набор решений равен
.
SpanGMKMIEPN8-410FQO,EPN7-301FQOHMLMJ.
Вот общая процедура.
Рецепт: Параметрическая векторная форма (однородный случай)
Пусть A — матрица размера m × n. Предположим, что свободными переменными в однородном уравнении Ax=0 являются, например, x3,x6 и x8.
Найдите сокращенную ступенчатую форму строки A.
Напишите параметрическую форму набора решений, включая избыточные уравнения x3=x3,x6=x6,x8=x8. Поставьте уравнения для всех xi по порядку.
Составьте одно векторное уравнение из этих уравнений, превратив коэффициенты x3,x6 и x8 в векторы v3,v6 и v8 соответственно.
Решения для Ax=0 тогда будут выражены в форме
х=x3v3+x6v6+x8v8
для некоторых векторов v3,v6,v8 в Rn и любых скаляров x3,x6,x8. Это называется параметрический вектор формы решения.
В этом случае набор решений можно записать как Span{v3,v6,v8}.
Особо подчеркнем следующий факт.
Множество решений однородного уравнения Ax=0 является пролетом.
Пример (набор решений представляет собой строку)
Поскольку в приведенном выше примере было две переменные , набор решений является подмножеством R2. Так как одна из переменных была свободна, набор решений равен строка :
Чтобы на самом деле найти нетривиальное решение Ax=0 в приведенном выше примере, достаточно подставить любое ненулевое значение вместо свободной переменной x2. Например, взятие x2=1 дает нетривиальное решение x=1·A31B=A31B. Сравните с этим важным примечанием в Разделе 1.3.
Пример (множество решений представляет собой плоскость)
Поскольку в приведенном выше примере было трех переменных , набор решений является подмножеством R3. С два переменных были свободны, множество решений представляет собой плоскость .
Здесь возникает естественный вопрос: можно ли написать решение однородного матричного уравнения, используя меньше векторов, чем указано в приведенном выше рецепте? Мы увидим в примере в Разделе 2.5, что ответ нет : векторы из рецепта всегда линейно независимы, а это означает, что нет способа написать решение с меньшим количеством векторов.
Другой естественный вопрос: являются ли множества решений неоднородных уравнений также остовными? Как мы вскоре увидим, они никогда не являются интервалами, но они тесно связаны с интервалами.
Существует естественная связь между количеством свободных переменных и «размером» набора решений, как показано ниже.
Размер набора растворов
Приведенные выше примеры показывают нам следующую закономерность: когда в согласованном матричном уравнении есть одна свободная переменная, множество решений представляет собой прямую, а когда есть две свободные переменные, множество решений представляет собой плоскость и т. д. Количество свободных переменных называется измерением множества решений.
Мы разработаем строгое определение размерности в разделе 2.7, но пока размерность будет просто означать количество свободных переменных. Сравните с этим важным примечанием в Разделе 2.5.
Интуитивно понятно, что размерность набора решений — это количество параметров, необходимых для описания точки в наборе решений. Для линии нужен только один параметр, а для плоскости нужны два параметра. Это похоже на то, как расположение здания на Пичтри-стрит, похожее на линию, определяется одним числом, а угол улицы на Манхэттене, похожее на плоскость, определяется двумя числами.
Напомним, что матричное уравнение Ax=b называется неоднородным , когда bB=0.
Пример (набор решений представляет собой строку)
В приведенном выше примере набором решений были все векторы вида
х=Rx1x2S=x2R31S+R-30S
, где x2 — любой скаляр. Вектор p=A−30B также является решением Ax=b: возьмем x2=0. Мы называем p частным раствором .
В наборе решений x2 может быть любым, поэтому набор решений получается следующим образом: мы берем все скалярные числа, кратные A31B, и затем добавляем конкретное решение p=A−30B к каждому из этих скалярных множителей. Геометрически это достигается тем, что сначала рисуется отрезок A31B, который представляет собой линию, проходящую через начало координат (и, что не случайно, решение Ax=0), и мы переведите или протолкните эту строку вдоль p=A−30B. Переведенная строка содержит p и параллельна Span{A31B}: это перевод строки .
Ах=0Ах=бп
Пример (множество решений представляет собой плоскость)
В приведенном выше примере набором решений были все векторы вида
х=Cx1x2x3D=x2C110D+x3C−201D+C100D.
, где x2 и x3 — любые скаляры. В этом случае частным решением является p=C100D.
В предыдущем примере и в предыдущем примере параметрическая векторная форма набора решений Ax=b была точно такой же, как параметрическая векторная форма набора решений Ax=0 (из этого примера и этого примера соответственно) , плюс конкретное решение.
Ключевое замечание
Если Ax=b непротиворечиво, множество решений получается путем взятия одного частного решения p задачи Ax=b и сложения всех решений задачи Ax=0.
В частности, если Ax=b непротиворечиво, набор решений представляет собой преобразование диапазона .
Параметрическая векторная форма решений Ax=b — это просто параметрическая векторная форма решений Ax=0 плюс конкретное решение p.
Нетрудно понять, почему ключевое наблюдение верно. Если p — частное решение, то Ap=b, а если x — решение однородного уравнения Ax=0, то
А(х+р)=Ах+Ар=0+b=b,
, так что x+p является еще одним решением Ax=b. С другой стороны, если мы начнем с любого решения x для Ax=b, то x−p будет решением для Ax=0, поскольку
А(х-р)=Ах-Ар=b-b=0.
Пример (множество решений — точка)
См. интерактивные рисунки в следующем подразделе для визуализации ключевого наблюдения.
Размер набора растворов
Как и в этом важном примечании, когда в согласованном матричном уравнении есть одна свободная переменная, множество решений представляет собой линию — эта линия не проходит через начало координат, когда система неоднородна — когда есть две свободные переменные, множество решений является плоскостью (опять же не через начало координат, когда система неоднородна) и т. д.
Еще раз сравните с этим важным примечанием в Разделе 2.5.
Каждой матрице A размера m×n мы теперь связали два совершенно разных геометрических объекта, оба описываемых с помощью интервалов.
Не путайте эти две геометрические конструкции! В первом случае вопрос заключается в том, какие х работают для данного b, а во втором вопрос заключается в том, какие b работают для некоторого х.
Вы искали вычислить масштаб? На нашем сайте вы можете получить ответ на любой математический вопрос здесь. Подробное
решение с описанием и пояснениями поможет вам разобраться даже с самой сложной задачей и вычислить масштаб онлайн, не
исключение. Мы поможем вам подготовиться к домашним работам, контрольным, олимпиадам, а так же к поступлению
в вуз.
И какой бы пример, какой бы запрос по математике вы не ввели — у нас уже есть решение.
Например, «вычислить масштаб».
Применение различных математических задач, калькуляторов, уравнений и функций широко распространено в нашей
жизни. Они используются во многих расчетах, строительстве сооружений и даже спорте. Математику человек
использовал еще в древности и с тех пор их применение только возрастает. Однако сейчас наука не стоит на
месте и мы можем наслаждаться плодами ее деятельности, такими, например, как онлайн-калькулятор, который
может решить задачи, такие, как вычислить масштаб,вычислить масштаб онлайн,как высчитать масштаб,как высчитывать масштаб,как вычислить масштаб,как вычислить масштаб картины,как вычислить масштаб карты,как вычислить масштаб на карте,как вычисляется масштаб,как вычислять масштаб,как найти масштаб,как найти масштаб плана,как найти масштаб численный,как находится масштаб,как определить масштаб,как определить масштаб плана,как определяется масштаб,как понять масштаб,как рассчитать масштаб,как рассчитать масштаб карты формула,как рассчитывать масштаб,как считать масштаб,как узнать масштаб,калькулятор масштаба,калькулятор масштабов,калькулятор масштабов на чертеже онлайн,калькулятор масштабов онлайн,калькулятор масштабов онлайн на чертеже,масштаб вычислить,масштаб вычислить онлайн,масштаб как вычислять,масштаб как определить,масштаб как определяется,масштаб как понять,масштаб как посчитать,масштаб калькулятор,масштаб калькулятор онлайн,масштаб найти,масштаб онлайн,масштаб онлайн калькулятор,масштаб онлайн перевод,масштаб определить онлайн,масштаб перевод онлайн,масштаб посчитать,масштаб рассчитать,масштаб рассчитать онлайн,масштаб формула,масштабный калькулятор,масштабы онлайн,найти масштаб,онлайн калькулятор масштаба,онлайн калькулятор масштабов,онлайн масштаб,онлайн масштаб калькулятор,онлайн перевод масштабов,определить масштаб,определить масштаб онлайн,перевести в масштаб онлайн,перевести масштаб онлайн,перевод в масштаб,перевод в масштаб онлайн,перевод масштаб онлайн,перевод масштаба онлайн,перевод масштабов онлайн,посчитать масштаб,рассчитать масштаб,рассчитать масштаб калькулятор,рассчитать масштаб карты как,рассчитать масштаб онлайн,расчет масштаба,расчет масштаба онлайн,формула масштаба. На этой странице вы найдёте калькулятор,
который поможет решить любой вопрос, в том числе и вычислить масштаб. Просто введите задачу в окошко и нажмите
«решить» здесь (например, как высчитать масштаб).
Решить задачу вычислить масштаб вы можете на нашем сайте https://pocketteacher.ru. Бесплатный
онлайн решатель позволит решить онлайн задачу любой сложности за считанные секунды. Все, что вам необходимо
сделать — это просто
ввести свои данные в решателе. Так же вы можете посмотреть видео инструкцию и узнать, как правильно ввести
вашу задачу на нашем сайте. А если у вас остались вопросы, то вы можете задать их в чате снизу слева на странице
калькулятора.
Найти численный масштаб по именному масштабу:
– численный масштаб
В 1 см 5000 см – именной
а) в 1 см — 500 м — 1 : 50 000
б) в 1 см — 10 км — 1 : 1 000 000
в) в 1 см — 250 км — 1 : 25 000 000
Найти точность масштаба:
Точность масштаба — это отрезок
горизонтального проложения линии,
соответствующий 0,1 мм на плане. Значение
0,1 мм для определения точности масштаба
принято из-за того, что это минимальный
отрезок, который человек может различить
невооруженным глазом. Например, для
масштаба 1:10 000 точность масштаба будет
равна 1 м. В этом масштабе 1 см на плане
соответствует 10 000 см (100 м) на местности,
1 мм — 1 000 см (10 м), 0,1 мм — 100 см (1 м).
точностью масштаба t, она определяется
по формуле: t = 0,1 × М.
Вычислить расстояние на местности по расстоянию на карте и ее масштабу:
Определить номер шестиградусной зоны по географическим координатам:
Например: x=5876354,86м
y=7564806,51м
в Y: 7 – номер зоны, 5 – сдвиг на 500 км
Определить
положение точки в шестиградусной зоне
по прямоугольным координатам:
Определить номенклатуру листа карты по номенклатуре смежного листа:
Масштаб карты
Масштаб
исходного листа
Исходный лист
делится на
Протяжение по
широте (по вертикали) и долготе (по
горизонтали
Пример номенклатуры
для последнего листа
Топокарты
1:1000000
1:500000
1:200000
1:100000
1:50000
1:25000
1:10000
1:5000
1:2000
—
1:1000000
1:1000000
1:1000000
1:100000
1:50000
1:25000
1:100000
1:5000
—
2×2
6×6
12×12
2×2
2×2
2×2
16×16
3×3
4°х6°
2°x6°
40’x1°
20’x30’
10’x15’
5’x7. 5’
2.5’x3.75’
1.25’x1.875’
25’’x37.5’’
N-37
N-37-Г
N-37-XXXVI
N-37-144
N-37-144-Г
N-37-144-Г-2
N-37-144-Г-2-4
N-37-144-(256)
N-37-144-(256-И)
Планы
1:5000
1:2000
1:1000
1:500
—
1:5000
1:2000
1:2000
—
2×2
2х2
4×4
40×40см
50×50см
50х50см
50×50см
6
6-Г
6-Г-IV
6-Г-16
Пример разграфки
листа миллионной карты на карты масштаба
1:500 000 (синие), 1:200 000 (зелёные) и 1:100 000
(жёлтые)
Пример разграфки
листа стотысячной карты на карты масштаба
1:50 000 (синие) и 1:25 000 (зеленые)
Нарисовать
горизонтали по 4-м опорным точкам:
Определить уклон дороги по масштабу, заложению и высоте сечения рельефа:
i=h/d*ρ”=h0/d*m
d-расстояние
m-знаменатель масштаба
Определить число горизонталей между опорными точками с заданной высотой сечения рельефа:
Найти высоту горизонтали по ближайшей к ней точке:
Абсолютную высоту какой-либо точки
местности, отметка которой на карте не
подписана, определяют по отметке
ближайшей к ней горизонтали. Поэтому
необходимо уметь определять отметки
горизонталей, используя отметки других
горизонталей и характерных точек
местности, подписанных на карте.
Например, отметку горизонтали а (рис.3)
можно определить по отметке высоты
197,4 и высоте сечения рельефа 10 м.
Рис.3 Определение отметки горизонтали
по отметке точки.
Отметка горизонтали а равна 190 м. Зная
отметку горизонтали а, можно легко
определить отметки всех других
горизонталей. Так, горизонталь b будет
иметь отметку 160 м, так как она расположена
ниже горизонтали а на величину, равную
трем высотам сечения рельефа (30 м). В
случае когда точка расположена между
горизонталями, находят высоту ближайшей
к ней горизонтали и к полученной высоте
прибавляют превышение данной точки над
горизонталью, определенное на глаз.
Например, мельница, обозначение которой
находится между горизонталями (рис.3),
имеет абсолютную высоту 162 м.
Вычислить
площадь участка по числу квадратов
палетки и масштабу карты:
Вычислить
цену деления планиметра по размеру
обводимого квадрата, отсчетам и масштабу
карты:
N1 — отсчет первый
N2 — отсчет второй
a – сторона квадрата (мм,
см)
m – знаменатель масштаба
карты
цена деления: ȵ = S/(N2-N1)=a2m2/(N2-N1)
Вычислить
дирекционный угол по румбу или значению
румба и знакам приращения координат:
r=arctg
Вычислить
дирекционный угол по истинному азимуту
и сближению меридиан:
α= γ-Ан
γ – сближение меридиан
Ан – истинный азимут
Вычислить
истинный азимут по магнитному азимуту
и склонению магнитной стрелки:
Ан=Ам+δ
Ан – истинный азимут
Ам – магнитный азимут
δ – склонение магнитной стрелки
Вычислить
коллимационную ошибку теодолита по
отсчетам по горизонтальному кругу:
С=
Обработать
отсчеты по горизонтальному кругу при
измерении углов способами приемов и
круговых приемов:
а) Способ приемов (если один угол): по
часовой стрелке
КЛ
КП
А
228°41′
48°42’
В
17°27’
197°29’
N=
— средний отсчет
N(A)=228°41,5′
N(B)
=17°28’
Β=N(B)
– N(A). Если искомый угол получается отрицательным,
то прибавляем 360°.
б)
Способ круговых приемов (более двух
углов, но не более 5)
КЛ
КП
N
A
(1) 0°4’
(1)180°6’
0°5’
B
(2)107°37’
(2)287°39’
107°38’
C
(3)251°3’
(3)71°6’
251°4.5’
A
(4)0°6’
(4)180°7’
0°6.5’
∆ +2’
∆ +1’
и после этого — значения углов относительно
первого (начального) направления.
Найти
угол наклона и место нуля по отсчетам
по вертикальному кругу:
— место нуля
ν
= КЛ-МО=МО-КП=(КЛ-КП)/2 – угол наклона
Вычислить
угол наклона по зенитному расстоянию:
ν = 90° — Z
Z – зенитное расстояние
— угол между вертикальным направлением
и направлением линии местности.
Вычислить
расстояние по отсчетам по дальномерным
нитям теодолита:
D=60,8м
Вычислить
поправку в измеренное расстояние по
результатам компарирования рулетки:
Например, на 20м отрезке рулетка показала
20,015
D=200м
∆d=0,015м
∆D=∆d*n=-0,15,
где n – число уложенных лент.
При длине ленты больше номинальной –
поправка положительная, при длине меньше
номинальной – отрицательная.
Вычислить
горизонтальное проложение по наклонной
длине и превышению:
d=
Вычислить
недоступное расстояние по базису и
измеренным от него горизонтальным
углам:
d=
Вычислить результаты поверки главного
условия нивелира по отсчетам по рейке:
Масштабный коэффициент – это число, на которое можно изменить размер любой геометрической фигуры или формы по отношению к ее первоначальному размеру. Он используется для рисования увеличенной или уменьшенной формы любой заданной фигуры и для нахождения недостающей длины, площади или объема увеличенной или уменьшенной фигуры. Следует отметить, что масштабный коэффициент помогает изменить размер фигуры, а не ее форму.
1.
Что такое масштабный коэффициент?
2.
Формула коэффициента масштабирования
3.
Как найти масштабный коэффициент?
4.
Часто задаваемые вопросы о коэффициенте масштабирования
Что такое масштабный коэффициент?
Масштабный коэффициент определяется как число или коэффициент преобразования, который используется для изменения размера фигуры без изменения ее формы. Используется для увеличения или уменьшения размера объекта. Масштабный коэффициент можно рассчитать, если известны размеры исходной фигуры и размеры увеличенной (увеличенной или уменьшенной) фигуры. Например, прямоугольник имеет длину 5 единиц и ширину 2 единицы. Теперь, если мы увеличим размер этого прямоугольника с коэффициентом масштабирования 2, стороны станут равными 10 единицам и 4 единицам соответственно. Следовательно, мы можем использовать масштабный коэффициент, чтобы получить размеры измененных фигур.
Обратите внимание на следующий рисунок, на котором показано, как масштабный коэффициент может изменить исходную фигуру на ее большую и меньшую версии. На следующем рисунке размеры исходного прямоугольника равны 3 единицам и 2 единицам. Для создания увеличенной фигуры размеры умножаются на коэффициент масштабирования, равный 3, по формуле: Размеры новой фигуры = Размеры исходной формы × Масштабный коэффициент. Это дает новые измерения как 9 единиц и 6 единиц соответственно. Точно так же, чтобы создать уменьшенную фигуру, мы умножаем исходные размеры на масштабный коэффициент 1/2. Это дает уменьшенные размеры как 1,5 единицы и 1 единицу.
Формула коэффициента масштабирования
Основная формула для нахождения масштабного коэффициента фигуры выражается следующим образом:
Масштабный коэффициент = размеры новой формы ÷ размеры исходной формы.
Эту формулу также можно использовать для расчета размеров новой фигуры или исходной фигуры, просто подставив значения в формулу.
Как найти масштабный коэффициент?
Масштабный коэффициент можно рассчитать, если заданы новые размеры и исходные размеры. Однако при использовании коэффициента масштабирования необходимо понимать два термина. Когда размер фигуры увеличивается, мы говорим, что она была увеличена на , а когда она уменьшается, мы говорим, что она уменьшена на .
Масштабирование
Масштабирование означает, что меньшая фигура увеличивается до большей. В этом случае масштабный коэффициент можно рассчитать по формуле, которая является еще одной версией базовой формулы, приведенной в предыдущем разделе 9.0003 .
Масштабный коэффициент = Большие размеры фигуры ÷ Меньшие размеры фигуры
Масштабный коэффициент для увеличения всегда больше 1. Например, если размер большей фигуры равен 15, а меньшей — 5, давайте поместим это в формулу, которая дает: 15 ÷ 5 = 3. Таким образом, мы можем видеть, что коэффициент масштабирования больше 1.
Уменьшение масштаба
Уменьшение означает, что большее число уменьшается до меньшего . Даже в этом случае коэффициент масштабирования можно рассчитать по формуле, которая является еще одним вариантом базовой формулы.
Масштабный коэффициент = Меньшие размеры фигуры ÷ Большие размеры фигуры
Масштабный коэффициент для уменьшения всегда меньше 1. Например, если размер меньшей фигуры равен 8, а большей — 24, пусть мы помещаем это в формулу, которая делает это: 8 ÷ 24 = 1/3. Таким образом, мы видим, что масштабный коэффициент меньше 1.
Обратите внимание на следующие треугольники, которые объясняют концепцию увеличенной и уменьшенной фигуры.
Важные примечания
При изучении масштабного коэффициента следует помнить следующее:
Масштабный коэффициент увеличенной фигуры обозначается буквами «r» или «k».
Если коэффициент масштабирования больше 1 (k > 1), изображение увеличивается.
Если коэффициент масштабирования меньше 1 (0< k <1), изображение сжимается.
Если коэффициент масштабирования равен 1 (k = 1), изображение остается прежним.
Масштабный коэффициент не может быть равен нулю.
☛ Похожие статьи
Геометрия расширения
Рабочие листы по коэффициенту масштабирования 7-й класс
Горизонтальное масштабирование
Вертикальное масштабирование
Примеры коэффициентов масштабирования
Пример 1. Запишите правильные формулы коэффициента масштабирования для следующих ситуаций. а) Если изображение должно быть увеличено. б) Если изображение должно быть уменьшено.
Решение:
а) Если изображение необходимо увеличить, масштабный коэффициент больше 1 (k > 1). Это означает, что изображение увеличено. Формула масштабного коэффициента = Большие размеры фигуры ÷ Меньшие размеры фигуры
b) Если изображение необходимо уменьшить, коэффициент масштабирования меньше 1 (0 Формула масштабного коэффициента = Меньшие размеры фигуры ÷ Большие размеры фигуры
Пример 2. Есть два подобных многоугольника, как показано ниже. Найдите масштабный коэффициент, используемый для создания меньшего многоугольника.
Решение: Дана размерность большего многоугольника 40 единиц. Заданная размерность меньшего многоугольника составляет 20 единиц. Здесь цифра уменьшена. Масштабный коэффициент = Меньшие размеры фигуры ÷ Большие размеры фигуры = 20/40 = 1/2. Следовательно, масштабный коэффициент, используемый для создания меньшего полигона, равен 1/2.
Пример 3. Треугольник был увеличен с коэффициентом масштабирования 2, что привело к новым размерам: 6 единиц на 10 единиц на 12 единиц. Найдите размеры исходного треугольника.
Решение:
Новые размеры треугольника: 6 единиц; 10 единиц; и 12 единиц; Масштабный коэффициент = 2
Масштабный коэффициент = размеры новой формы ÷ размеры исходной формы. Подставляя значения в формулу для всех трех измерений:
а.) 2 = 6 ÷ Размеры исходной формы
Размеры исходной формы = 6 ÷ 2 = 3 единицы
б.) 2 = 10 ÷ Размеры исходной формы
Размеры исходной формы = 10 ÷ 2 = 5 единиц
c.) 2 = 12 ÷ Размеры исходной формы
Размеры исходной формы = 12 ÷ 2 = 6 единиц Следовательно, первоначальные размеры треугольника были = 3 единицы, 5 единиц и 6 единиц
перейти к слайду перейти к слайду перейти к слайду
Отличное обучение в старшей школе с использованием простых подсказок
Увлекаясь зубрежкой, вы, скорее всего, забудете понятия. С Cuemath вы будете учиться визуально и будете удивлены результатами.
Записаться на бесплатный пробный урок
Практические вопросы по коэффициенту масштабирования
перейти к слайдуперейти к слайду
Часто задаваемые вопросы о коэффициенте масштабирования
Что такое масштабный коэффициент?
Масштабный коэффициент — это число, которое используется для рисования увеличенной или уменьшенной формы любой заданной фигуры. Это число, на которое можно изменить размер любой геометрической фигуры или формы по отношению к ее первоначальному размеру. Это помогает изменить размер фигуры, но не ее форму.
Что произойдет, если коэффициент масштабирования больше 1?
Если коэффициент масштабирования больше 1 (k > 1), это означает, что данное число необходимо увеличить.
Что означает масштабный коэффициент 0,5?
Масштабный коэффициент 0,5 означает, что измененное изображение будет уменьшено. Например, у исходной фигуры квадрата одна из сторон равна 6 единицам. Теперь давайте воспользуемся масштабным коэффициентом 0,5, чтобы изменить его размер. Мы будем использовать формулу: Размеры новой формы = Размеры исходной формы × Масштабный коэффициент. Подставляя значения в формулу: размеры нового квадрата будут = 6 × 0,5 = 3 единицы. Это показывает, что масштабный коэффициент 0,5 изменил цифру на меньшую.
Как найти масштабный коэффициент?
Масштабный коэффициент можно рассчитать, если заданы новые размеры и исходные размеры. Основная формула для нахождения масштабного коэффициента фигуры: Масштабный коэффициент = размер новой формы ÷ размер исходной формы. Например, если длина стороны квадрата равна 6 единицам, и если размер квадрата был увеличен так, что длина стороны квадрата стала равной 18 единицам, давайте найдем коэффициент масштабирования. Мы будем использовать формулу Масштабный коэффициент = размер новой формы ÷ размер исходной формы. После подстановки данных значений мы получаем Масштабный коэффициент = 18 ÷ 6 = 3. Следовательно, масштабный коэффициент, используемый для увеличения размера квадрата, равен 3,9.0005
Что произойдет, если коэффициент масштабирования меньше 1?
Если коэффициент масштабирования меньше 1 (0< k <1), то новое формируемое изображение будет сжато или уменьшено. Другими словами, новая фигура будет иметь меньшие размеры по сравнению с исходной фигурой после того, как она будет изменена с использованием масштабного коэффициента меньше 1.
Где мы используем масштабный коэффициент?
Масштабный коэффициент — это число, на которое можно изменить размер любой геометрической фигуры или фигуры по сравнению с ее первоначальным размером. Когда объекты слишком велики, мы используем масштабные коэффициенты для расчета меньших пропорциональных измерений. Он используется для сравнения двух похожих геометрических фигур, а также в других областях, таких как приготовление пищи, где количество ингредиентов может быть уменьшено или увеличено в зависимости от ситуации. Масштабный коэффициент также можно использовать для поиска недостающих размеров на подобных фигурах.
Какова формула масштабного коэффициента?
Основная формула, используемая для расчета масштабного коэффициента, следующая: Масштабный коэффициент = размер новой формы ÷ размер исходной формы . В случае, если исходная фигура увеличена, формула записывается так: Масштабный коэффициент = Большие размеры фигуры ÷ Меньшие размеры фигуры. Когда исходная фигура уменьшена, формула выражается следующим образом: Масштабный коэффициент = Меньшие размеры фигуры ÷ Большие размеры фигуры.
Что означает отрицательный коэффициент масштабирования?
Отрицательный масштабный коэффициент заставляет расширение поворачиваться на 180° и создает изображение по другую сторону от центра увеличения.
Какой коэффициент масштабирования делает фигуру меньше?
Масштабный коэффициент меньше 1 уменьшает исходную цифру. Например, давайте используем масштабный коэффициент 1/3, чтобы изменить размер фигуры с заданным размером 36. Мы поместим данные значения в формулу: Масштабный коэффициент = размер новой формы ÷ размер оригинала форма. Подставляя значения, мы получаем, 1/3 = Размер новой фигуры ÷ 36. После решения, размер новой фигуры = 12. Поскольку 12 меньше, чем 36, это означает, что исходная фигура была уменьшена в размере. . Таким образом, можно видеть, что масштабный коэффициент меньше 1 делает фигуру меньше.
Чем масштаб отличается от коэффициента масштабирования?
Масштаб — это коэффициент, который используется для определения соотношения фактической фигуры или объекта с его моделью. Он обычно используется на картах для представления реальных цифр в более мелких единицах. Например, масштаб 1:3 означает, что 1 на карте соответствует размеру 3 в реальном мире.
Масштабный коэффициент — это коэффициент преобразования — число, которое используется для увеличения или уменьшения размера фигуры. Например, если круг нужно увеличить в размере, используя масштабный коэффициент 4, а длина окружности равна 7 единицам. Какова будет длина окружности нового увеличенного круга? Мы будем использовать формулу Масштабный коэффициент = размер новой формы ÷ размер исходной формы. Это можно записать как Размер новой формы = Масштабный коэффициент × Размер исходной формы. После подстановки данных значений мы получим Размер новой формы = 7. Решив это, мы получим Размер новой формы = 28 единиц.
Загрузить БЕСПЛАТНЫЕ учебные материалы
Рабочий лист по геометрии
Калькулятор масштаба
Создано Wojciech Sas, PhD и Rita Rain
2023 Содержание:
Что такое масштабный коэффициент?
Типы масштабов
Наиболее популярные архитектурные масштабы
Масштабирование площади и объема
Применение калькулятора масштабирования
Часто задаваемые вопросы
Этот калькулятор масштаба, также известный как калькулятор преобразования масштаба или калькулятор масштабного коэффициента, помогает вам найти масштаб между двумя объектами или размер масштабированных/реальных структур для заданного масштаба . Читайте дальше, чтобы найти ответ на вопрос «Что такое масштабный коэффициент?», узнайте, как найти масштабный коэффициент, узнайте, что преобразование масштаба имеет много общего с преобразованием длины, и забудьте о проблемах с масштабированием!
Что такое масштабный коэффициент?
Масштабный коэффициент может быть определен как отношение между двумя числами (о которых вы можете узнать больше в калькуляторе отношений). Оно может быть как больше, так и меньше единицы, в зависимости от того, увеличивается или уменьшается масштабируемый объект.
Понятие шкалы широко используется во многих областях, например, в математике, географии или экономике. Обычно мы можем найти масштабы, читая инструкции к масштабной модели или карте города.
Типы весов
Существуют различные способы представления шкалы:
Числовой масштаб — безразмерный, а вид 1:1000 означает, что масштабный коэффициент равен 0,001. Любое соотношение двух чисел является правильным, но обычно принимают одно из них за 1 , например, 2,5:1 вместо 5:2 . Если в упрощенной форме одно из чисел не является целым числом и одновременно меньше 10 000, стоит задуматься о точности записи.
В этом масштабном калькуляторе мы рекомендуем использовать до 5 значащих цифр, если некоторые из них являются десятичными, или округлить результат до ближайшего целого числа. Мы можем использовать числовую шкалу для расчета вертикального преувеличения, выделения определенных объектов на трехмерных картах и чертежах . Проверьте наш калькулятор вертикального преувеличения для более подробной информации!
Лексическая шкала — Выраженная словами, например, «от одного сантиметра до одного километра» или эквивалентно 1 см : 1 км . Мы используем их в основном с картами, и преобразование говорит о том, что 1 см на графике соответствует 1 км фактического расстояния. Также мы можем встретить описание, указывающее размер масштабируемого объекта в процентах от реального.
Линейный (графический) масштаб — Показывает размеры объекта или карту в графическом виде . Это представление действительно естественно и интуитивно понятно. Перенос шкалы из точки А в точку Б сразу говорит о расстоянии между ними. Вам не нужно делать никаких расчетов! Даже если вы захотите перепечатать карту с таким масштабом в более крупном формате, это не будет проблемой, так как масштаб также будет автоматически увеличен.
В приведенном ниже примере, если предположить, что расстояние между основными делениями равно 1 см , оно соответствует 1 км реальной длины, и тогда масштаб эквивалентен 1 см : 1 км или 1 :100 000 .
Графические шкалы не обязательно должны быть связующим звеном между одними и теми же физическими величинами. Например, расстояние между соседними тиками может обозначать интервал времени в одну секунду. Вы можете найти этот тип преобразования на подавляющем большинстве графиков.
При анализе данных иногда стоит учитывать логарифмическую шкалу. Это соотношение, а не разница между соседними тиками, которая является постоянной . Таким образом, можно сопоставлять значения в диапазоне нескольких порядков на одном графике.
🔎 Говоря о различных масштабах, наш калькулятор масштаба разрешения предлагает масштабировать или изменять размер цифровых элементов, сохраняя при этом их соотношение сторон.
Самые популярные архитектурные масштабы
Мы часто придерживаемся некоторых из широко используемых архитектурных масштабов в строительных или ландшафтных проектах . Нет необходимости учить их наизусть, но очень удобно хранить их в одном месте и знать, как найти коэффициент масштабирования в каждом конкретном случае. В таблице ниже мы перечисляем несколько примеров, которые могут пригодиться в какой-то момент:
Масштабированная длина
Реальная длина
Масштабный коэффициент
3 дюйма
1 дюйм
1:4
9000 8
1 1⁄2″
1′
1:8
1″
1′
1:12
3⁄4″
9 0010
1′
1:16
1⁄2″
1′
1:24
3⁄8″
1′
90 384
1:32
1⁄4″
1′
1:48
3⁄16″
1′
1:6 4
1⁄8″
1′
1 :96
3⁄32″
1′
1:128
1⁄16″ 9 0005
1′
1:192
Преобразование масштаба площади и объема
Возможно, вы удивитесь, но преобразование масштаба для поверхностей и объемов не так очевидно, как для расстояний. Масштаб обычно говорит о соотношении между масштабированной и исходной длинами, что означает, что каждое измерение должно измениться .
Если мы найдем, что масштабный коэффициент равен f , то отношение между масштабированной и фактической площадью будет f² , а для соответствующего примера с объемами будет f³ .
Допустим, вы хотите уменьшить длину окружности в 2 раза. Тогда можно сразу сделать вывод, что новая площадь будет в 4 раза меньше. С другой стороны, вам может быть интересно, как найти коэффициент масштабирования между двумя поверхностями или объемами — просто вычислите соотношение масштабированного и реального значения, и коэффициент масштабирования, описывающий вашу модель, будет квадратным корнем для площадей и кубическим корнем. для томов.
В этом калькуляторе коэффициента масштабирования вам не нужно беспокоиться об этом факте. Вы можете просто выбрать вариант, для которого хотите найти масштаб.
Применение калькулятора преобразования масштаба
Представим, что вы нашли план садового сарая своей мечты. В инструкции к макету написано, что длина 10 см, ширина 8 см, высота 5 см. Вы хотите построить конструкцию длиной 5 м, в которой пропорции других размеров сохранены.
Оцените масштабный коэффициент , 10 см / 5 м = 0,02 .
Запишите его в виде числового масштаба , 1:50 , чтобы вы запомнили масштаб вашего проекта.
Найдите остальные размеры – ширина: 8 см / 0,02 = 4 м , высота: 5 см / 0,02 = 2,5 м .
Вы можете оценить общий объем сарая, чтобы убедиться, что все ваше садовое оборудование поместится внутри: 5 м × 4 м × 2,5 м = 50 м³ . Вы также можете преобразовать объем в имперские единицы, что составляет около 65,4 ярда³ .
Как видите, рассчитать окончательный размер стен сарая с небольшой помощью нашего масштабного калькулятора совсем несложно. Однако общий вид не будет внушительным, если в постройке будут только голые стены без крыши. Однако вы можете это изменить — воспользуйтесь нашим калькулятором кровли и создайте прекрасное место в своем саду!
Часто задаваемые вопросы
Как рассчитать расстояние по масштабу карты?
Для определения расстояния между двумя объектами на основе их расстояния на карте:
Определить расстояние между этими объектами на карте .
Применить формулу преобразования масштаба : Расстояние карты / Масштабный коэффициент .
В результате вы получите ровно реальное расстояние между двумя объектами.
Что означает наличие шкалы от 1 до 100?
Масштаб 1:100 означает, что расстояние на карте в 100 раз меньше реального расстояния.
PDF-To-JPG-Преобразование страниц PDF в изображения.
PDF-To-JPG-Преобразование страниц PDF в изображения.
Поделиться сайтом в социальных сетях и блогах
ПОДПИШИТЕСЬ НА НАС В
Twitter
Facebook
youtube
email
PDF23.com (short url)
Лучшие бесплатные редакторы PDF и онлайн-инструменты
Обрезать PDF
Обрезайте PDF-файлы онлайн бесплатно. Перетащите файл и проведите пальцем по области, которую хотите обрезать. Автоматически обрезайте белые поля или просматривайте страницы PDF и выбирайте области обрезки.
PDF разблокировать
pdf защита паролем требует правильного пароля для разблокировки файла pdf. Требуется защищенный пароль pdf. Если вы забыли пароль PDF-файла или пароль владельца, вы можете использовать средство для удаления PDF-файлов, чтобы разблокировать PDF-файл.
JPG в PDF
Бесплатный онлайн-конвертер JPG в PDF, позволяющий объединить несколько изображений в один документ PDF
Сжать PDF
Простые шаги для сжатия больших файлов PDF в Интернете, сжатия файла PDF для получения того же качества PDF, но меньшего размера файла. Легко и бесплатно сжимайте или оптимизируйте файлы PDF в Интернете.
Объединить PDF
Легко объединяйте файлы PDF в Интернете. PDF-editor-free.com — это решение для пользователей, которые хотят объединить несколько файлов в один PDF-документ. Наши инструменты просты в использовании и бесплатны
Удаление страницы PDF
Наш онлайн-инструмент PDF можно использовать для удаления одной или нескольких страниц из документа PDF. Просто загружайте, изменяйте и сохраняйте файлы
Объединить PDF
Разделить PDF
Сортировка PDF-страниц
Удаление страницы PDF
Повернуть PDF
PDF в OCR
Сжать PDF
Обрезать PDF
Изменить размер PDF
Восстановить PDF
Защитить PDF
PDF для удаления паролей
PDF разблокировать
PDF в JPG
JPG в PDF
PNG в PDF
Изображение в PDF
PDF экспорт изображения
Водяной знак PDF
Добавить текст в PDF
PDF-текст в рамку
PDF в RGB
PDF в CMYK
Iccprofile для PDF в RGB
Iccprofile для PDF в CMYK
Печать переменных PDF
RGB в CMYK
Word в PDF
Excel в PDF
PowerPoint в PDF
PDF в Word
PDF в текст
Конвертер PDF
Illustrator в PDF
PDF в EPS
TIF в PDF
PDF в TIF
Читатель PDF
Word Viewer
Excel Viewer
PowerPoint Viewer
Illustrator Viewer
Подписать PDF
PDFредактор
Этот файл хранится всего 30 минут
Нужен пароль для открытия PDF-файла?
Подтвердите, что у вас есть право удалить пароль этого PDF-файла, и согласитесь с нами на удаление пароля.
Если вы согласны, мы попытаемся удалить пароль для вас, используя бесплатную онлайн-программу для удаления паролей в формате PDF.
Согласен
У меня есть право удалить пароль этого файла, и я согласен разрешить удаление пароля
Удаление пароля требует больших вычислений и времени. Когда обработка будет завершена, вы получите уведомление по электронной почте.
На этот адрес электронной почты будет отправлено письмо с подтверждением.
Отправка подтверждения по электронной почте …
Войдите в свой аккаунт
Забыли или изменить пароль?
Нет учетной записи? Зарегистрироваться
Выберите свой любимый тарифный план
Частота пожертвований:
Один раз
Ежемесячно
Ежегодно
Сумма пожертвования:
Privacy Policy
разработка программного обеспечения
Несколько JPG В PDF Python
Конвертировать JPG в PDF на Python
Современные Python библиотеки позволяет Python via . NET разработчикам конвертировать JPG изображения в PDF формат несколькими строками кода. Движок конвертации JPG анализирует исходное графическое содержимое и экспортирует объединенное изображение как PDF документ
Использование Python для преобразования JPG изображений PDF формата с максимальной гибкостью и скоростью. Запустите онлайн-демонстрацию и проверьте PDF прямо в браузере. JPG Conversion API поддерживает множество полезных опций.
Объединить JPG в PDF на Python
Чтобы преобразовать несколько изображений JPG в PDF используйте Python библиотеку, которая обрабатывает все низкоуровневые детали.
Конвертируйте несколько JPG и сохраните результат как один PDF документ. Если вы разрабатываете Python код, преобразование формата изображения будет проще, чем кажется. См. пример на Python, который выполняет итерацию по файлам изображений, объединяя их в один PDF документ
import aspose. words as aw
fileNames = [ "Input1.jpg", "Input2.jpg" ]
doc = aw.Document()
builder = aw.DocumentBuilder(doc)
for fileName in fileNames:
builder.insert_image(fileName)
# Вставляем разрыв абзаца, чтобы изображения не перекрывались.
builder.writeln()
doc.save("Output.pdf")
Выполнить код
Как конвертировать несколько JPG в PDF
Установите ‘Aspose.Words for Python via .NET’.
Добавьте ссылку на библиотеку (импортируйте библиотеку) в свой Python проект
Откройте исходный JPG файл на Python.
Преобразуйте несколько JPG файлов в PDF за несколько секунд.
Вызовите метод ‘append_document()’, передав имя выходного файла с расширением PDF
Получите результат преобразования JPG в PDF.
Python для конвертирования JPG в PDF
Мы размещаем наши пакеты Python в репозиториях PyPi. Следуйте пошаговым инструкциям по установке «Aspose.Words for Python via .NET» в среду разработчика.
Системные Требования
Этот пакет совместим с Python 3.5, 3.6, 3.7, 3.8 и 3.9. Если вы разрабатываете программное обеспечение для Linux, ознакомьтесь с дополнительными требованиями для gcc и libpython в документации по продукту.
Вы можете объединить JPG со многими другими файловыми форматами:
Объединить PDF в JPG — Преобразуйте свои PDF-файлы в JPG онлайн бесплатно!
Объединить PDF в JPG — конвертируйте ваши PDF-файлы в JPG онлайн бесплатно!
Преобразование PDF в JPG онлайн с любого устройства mac, linux, android.
Работает на aspose.com и aspose.cloud
Перетащите или загрузите свои файлы*
Выберите файл
Выберите из Google Диска Выберите из Dropbox
Введите URL-адрес
*Загружая свои файлы или используя наш сервис вы соглашаетесь с нашими Условиями обслуживания и Политикой конфиденциальности
Сохранить как JPGPDFDOCDOCXXLSXPPTPPTTXTEXHTMLPNGTIFF
Объединяйте файлы PDF в JPG в нужном вам порядке. Современный бесплатный онлайн-конвертер создан для быстрого объединения нескольких файлов в один документ. Это приложение для преобразования PDF в JPG отвечает на просьбу упростить отправку, совместное использование, печать и просмотр документов. Вы не должны тратить свое время, выполняя эти операции вручную в настольном программном обеспечении. Наша цель — предоставить вам наиболее эффективные решения для оптимизации рабочего процесса в офисе с помощью онлайн-приложений. Объединение нескольких файлов в один документ на высокой скорости Благодаря надежной работе этого онлайн-инструмента вы можете легко объединять несколько файлов PDF в JPG с высокой скоростью и сохранять результат в различных форматах, включая PDF, DOCX, HTML, MD, EPUB, PNG и JPG. Этот инструмент конвертации работает для всех платформ: Windows, Linux, macOS и Android. Установка настольного программного обеспечения не требуется. Это мощное, современное, быстрое, гибкое, простое в использовании и совершенно бесплатное приложение.
Книги о том, как объединить PDF в файл JPG
Преобразование PDF в JPG
Преобразование PDF в Word
Как объединить PDF в файл JPG
1
Откройте браузер на веб-сайте бесплатного приложения PDF и перейдите к инструменту объединения.
2
Щелкните внутри области размещения файлов, чтобы загрузить файлы, или перетащите их. Вы можете загрузить максимум 10 файлов для операции
3
Нажмите кнопку «ОБЪЕДИНИТЬ», чтобы начать объединение файлов.
4
Мгновенная загрузка, просмотр или отправка объединенного файла по электронной почте.
5
Обратите внимание, что файл будет удален с наших серверов через 24 часа, а ссылки для скачивания перестанут работать по истечении этого периода времени.
youtube.com/embed/1zytpAa1Pug» srcdoc=»<style>*{padding:0;margin:0;overflow:hidden}html,body{height:100%}img,span{position:absolute;width:100%;top:0;bottom:0;margin:auto}span{height:1.5em;text-align:center;font:48px/1.5 sans-serif;color:white;text-shadow:0 0 0.5em black}</style><a href=https://www.youtube.com/embed/1zytpAa1Pug?autoplay=1><img src=’data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAAn4AAAFmBAMAAAABk4o4AAAAJFBMVEX///9AQEA1kssyMjLo+fpCi7FPT0/Cys7d3d10dXWYmJh5rMTb5mXtAAAwGUlEQVR4Aezat3EcYRBEYQood+qv2jwgbXoQUQC4CK5ODV2qadKiiICZkjH0GKfeC+GrXr1vdrgL6cuPGGPE7rbjfiqbD7+TkuoyzPD7UFk1gv25lUqzmOFnVlmaTezPTSn9itkLfl6S8lcEfmYPudHiLuzwK83vBn5mwq/VhfLLGr+Gn3J9GY3Y38dL9ud2ksr/flN4sb9Mfef4tTsp1RN+Hb98uvQBuX6Uiv35lVTXcYmfmZQ1wg+/ws/vRKkaL+HH/vBrJKVmMcINv84HEPwelPoTdvjlRr/u8HOThF9rf1l/7y7DDT8JP/a3rS6yeh+A8avFFHb4SQuOX7eTiywtJvx65z/fD79kf5z/tnr9nePXev74HCPsOP/lAr/e+S/88Cv82uc/O/YnJX4dv8zPI7YTfvhV6fNlbCf88JOq48f+lC0//IQf+9vm+6uOh47sr/3+PmxA/DalxSV+bg9Z3f3h5+8Pv+b7Z/wyF5358fyrRbzg53XyoEz+v/KT9GX+j7zzSJLdhsGwFrjAxL0DD/Di+l+gatIOZTj1xuECDupRv+qlg2be9l3A4QpP9UJfzkKzuyVVTSCcDf9FcXL66gcJYUgqePzSDdetgnv+qH8OP/5hIEf2Bqyfavcecu7/iMvPgYNGvY9fe7X4OWj+NzVe7jD6EMx0k/fYm/79Hz+Hzv+wpUgGcPIa/APfDfHb/hzs/g0TGJiywQ24yE9xiN+2fRh4/tfQYEAEmvKkaTBb8+8fbAPvHyTrAKKKaDvYAbB32Tsq67nX8Nne8a/t97/Fmn8xxCGDydhVRhCgatIqop3xwFzBb0Dqh7+eX7z7txyoYOJCgX/3+Rufx8v/zErGrmmaVYmapmYCkZ9f27Zf7n0ejx8APll2XdISiaxe1czu8Y96+51EPL/E4rbp1CFZNYzKq9bOLwm2/tkoME4yvndHkjRpY5lN1wCJfPyuQp5/RcztSnWKaEpPph+TpDqrAR8+aheL9lEs/3FFFfNJJ4bIJdXGOQba+X/Pg/mPrDvp1EXPJKqrmslVt7my+A00/1LueWnB61VSfcVwLt+9iuU/Awg6cbsvS2c1Myo4lh8sosUvCLwc3Od04Kom5/aZ6wfR6qe8HOznBviKs4tRun3r2YNg+y/ppPs99hO7LIlxlBGo999lHH65mMIXKpLzY79UasC1fTASPxN4rmLZslPJOk360RofFfP7OtjzP9jCd+CXnBAtgMkx/xq/QPWX6ewh3z5t35AtUbkxgzYLvoLz+KtQ/gPn2UPK7JbbWPoRM1VUxq9po/GrTroidFPEaeiT1ux6/las/JkKkr+7zWkpIBXzW9i/3yLd/87VABkht0Q2AQzH+Pfl8XEo/3WSZwK/Us6h0wyl/BYLO744jv9Q4UQ1JbEQNYZSEstpoJ2kf3NWo0Jp+bk52Ivy/F+y60I0jeIxpTvZbZR2/OzSlwCVPv6jPQg1f/Byarkkqum2Jpsmo69JeQBEOb848Yue33zCTws1smzmV1x+fv5oL9D6IbbpQ8b1vFdNgTpNMq6iMlNh+W9x/SCK/5BvfkWHXERXDZfoZKWbrDAluweuUbz78lkYfiY+0WTo8ryR1uX4+8TEnEuGKV9SxI/W/L6/fHBwHImfrJX56Ssmi8Q7m4l5mblv+L3kUv/V38bxX66d7v41nsx+NHz0prYNezNg/kKTfsDFT1/4di9U/C63DPI8usGHmwkOYp5L5pfW/Ij+d/zIOsxlSOTGYQi6+WuQUVoA78owBr549emve6Hid64jfha+KJi288A51GXSR1y6+7d9ESp+acNPeiWtwSXUDTJOOrf/6KpXKH7mv6Sqsu5nAIq/kEf8UjG/tv18L1T+vJzpTrPyxVQg45czx+w/lBye02svkv+oOmm2etU0cEw8O35S7j/j9yAOP8NFxDsBniVbnWzC1/yHstVX9eL65vLL0wf5ha3t/Q/Fr128ETFckb8pPNiV/ii/4wd5T8jxo+N/Iz/QLT6CibIAeALf+G0lH6F08+/lg5vt9+DBfyd+kbubt53Tb+ydzU8cSdbus9WpzjKr99F5FR68R+92js4omGKVo6k7YN8dklfvZyha6TarskAU0JsaNWqwV6CywPYKRAts1ndW/c/dOFGVRY1vZTkTY8p91U8l1VlZWQv/+ok4kfF1Pn6Vy+Aibz0fl99Y9dUuv7nOnqzgZxjxOhn6+viV5stLHjfw0sqbZy/UVJCl/+qX37XA78V0fmLidW88ZovvnV8+a3Ze+rH9ZmlyaeZk+VX/pfVGL3cuME0kFioh8Ffnv3G5m620wff5kN9SHMNs4r/eANMkBUdu1tuZ/Bxgvor6L/+8rRHK+q/037/Vqv8Od6r4mWuKBtw4t1+f/2bh2WjO6U2b+KqiGMtvo/aLPr6tksMUtVMP1dFfLMCAK+s60neGIR5dYWFI6cICQUSex/UiMxGIwWwM4BFEcHCGLBMIQUzghv5LJ72T1imdaTpp1bj8N9ejVJ6mk/6rye/gE/xI+RGIFIQQE0oxCCr37pgMVAQDGXLzysjBKegR+wJELMqboKLhH8FR4/ihZokA9C8qLT/GK2mEE99VnSRVeh297yTx0zhulyr916j+072fXwlhihZv/MeOlYAzEQZFaKywVJbPXgCgIEBgFBA8HGgIiZiMACRMDBONB8joDgdxzIjfUJP2S0dZ5J10YgQoHOnNf9J4qbymf5PfB5W3JGkJMvpP1cR/OzsveTa/vym/wrnoLSembLI4iqdGuj8BxnGBwhTE8Rp5MmIKGBgHiOIugIIAciiocBFZAThDZApXgBqV37iovNfr3IHycfEt42+D+m/tUBcvoIKfA0DKjw2JsCmYSQADiZiEI0o52xRhFE5EjBNEERUSP0MEDn74NcDwDD0r4IT1hAsSgWCGpuH78dd///d/f/q5+vewZHpcBaZp0/ir/Ha2bQU/8iN+wiQceZEtDByMZzAZjyBbnG2jEHLCBfQvyhderAOLGC+G2ZCYgsSo+cRCMDq8xKteDLg+v9oLo2sQ7KUakW9Z/x3q3k2Wp/JLIj9W/4EXrw57Hwj+0R4T5PSSiXB1ARPu6/VXe3vHkMWrnXALI4qu/KPefvj4LnwnMCQboT9OvWf2+HRnl+T51c5BL/wgnPUO9J5qVSyPCd3zsZP59tK5MWF8uAzozeOvlt8LM4tf9B/xlQabD+wftlhA3ccgZ7ubgMOGPky1LmHf6y2XkQMD3cuzJMkGi90keeUR6G6Fr18K0G497yYLjnZipfPKUbur36ABv7CrwdOhUe5AAeBE+7lcZl3Lf7p2WveOqKr/mFn49bcMv5LsnbzrLgzsSjJwVrqZeNNOBvG+t93H7946WY63ZH7YZqH+TutyI788Ozh5k1yIodetD8VVcmHDz95k19d+Odl1b5LdE5bX2WXxPtkUVKrx6qzmq92StCy/5cBxPX6h+VzB7/ko/p59C4fTJ074WXJu2/0LWJtnPvBrlfXfC2bG+wMnxUZ+wQBc4Nfa9Xx2sHMpbfWp7X7wYrq7Iu1k61IK+SHzZLu74PDmebH784wm9NTlHUt34L/1OL1ta9RtXfJTA9bzXyus3V+lCv8lH64/vHv3rvstG9vdFivhX2rDGdNKKxmQf7ggZfyFEOe7wqRfw4ACvwVv5WGyR+Cj75hW0hNBgMZo56skxGePBXL2UvhROhAj3y84quk/fU54OmanNVZ5VJus4oionv5bJ5na/1Lv8e2JYKrayU6i6n/LbiUdsPX8/YKVo5fslxe6F+S/f8AIMtz9SXGvHXPh6GiB4Qws9bfFhGJ/IgX9ywP2f1jw4mQ5I7STSzbOBtMafP9A6FlGxtByJmCu579Ul8fcmdZHI73puP7TAFzPf2ux+ewq/Nc77AV1v2EsZ94xu3/JmL5fYP/Dg/Cvp6Of7YjfJgMPM8dU+D9nDANm6r9g8EpKBv5PCxxgEzteSXzg5y2TOXthQX9aAL1+IGD/KBHU9Z8uj9F/4h3w0yAexzijJuOH+q/W1uO7XBU/TgoWkrPITzyRwqGHGdHR34MLJTBEEPPZZkHBQDDkEG5xDgB1XzAHXgT4f10QOnogQW1dKZFQkD37mxQSLExvXooIt3e8MajpP12af0dSgCW/6L+ouv47jGtXnZvKr0UiIPrlG6Y/BwcBbrkl1M48nW3+sMC2P8BN+XV/ygTwtNxiAhjU3bQmeI288mOctZKg/cTLYuKIoEAhZz/rN/04e8IBXIdfnqRP1sfjjHcBMgSQoPw2/uuFtYNMqOh/KQDQ6+C/P2uocFhOCZwe2+7F8gKHchi5O40fRH/M2BHRcsrMYEgIuiztRDz8HxeYzpKozFE7JUOGnmUDWelvB35polr1tdsv+WNtPN9R/F1fUn6qdGL8Y6mu/w4OB87y9Pjh2XMcyi/9IfBj77WSd8FYXb/Ycsvhmsra7k8M98fSfwIYNtTfBBD4ASF2MI6+lShik3hY8c/Sg+tu5gPZ70RlBVSf38xo29x/t63/lJ8nU83PgI5i/QfviJQfzn5ur5FNBqEIj8svBZNlgAlY9JaCMeS3OOJHOPoOxBAIlB+zP1tLknSXQGd/Y0dwzFw3fuSP78R85UrgSX5N6r9y7YezqPYfgnOUHzky/l8zJnrzYCUTdC/Ccx1URs7+yiHIZl4EpC08lfIzVPqPQnUHh5INIj8K0E9Oex+8cPjGeqdga/svefJUm313xu/fJ+u/8QKQmvxekavqP4j8SPk9bHkjhTbuiB4uLD/gEELORjnnC1Z+WG55CyeBE2Ci/9iN/Sf0wwKBxME4m3j4wuYkLFQ4eZYRQDDGoC6/VeU3tZW8PuVttlFDD8S/j+u/Zv7T3uf9l+TBs/0XzvMLKbzt7jJ4JfvhGw6lujvqdzCBXwFud85twbb788iU6j8p+TE9DHiLQoRd9J+z+SUJCYM2Mm8ZJEADfusT/itZzYI05Sj9t7R0u/ZfGpt/W9tM/Cn/MXcXRORRcswG7VZ3U+jZwtrA2SG/Xx6LsHSfkMhGcgFCkKj/Aj8e8vPt/gcR5hOhxchPullom78lKdr9bXEMT1SXn/477yx6rC+NnJY2r/9i5hki4BP+YzltfZDF95lna7gfzEiPWhkRI+o0o+dM71sf8HzniUeUjOIHk/Kjgn9ZvRS52vORn/F0Gjt894j5LDsRe7pHZGrxK2c431X9Fzpg8vQj/9V8/l0N3acXZKbh40clv2+Y0e7reNcLgbXSTQZw7WRBCCojj9LV5Fi78Vbz5IUFHGD+mZ8YedZP9zvJE9J2I5j8w9Xrq16/dcz0qK9jYw+I6rWfVZUPIPXD8lKJMC71VaVN/afhIztGhRZ7jqO7ti2cbHST1i4xQO509VjIbu0SDIIY9n2eDSy/29IGiQxjCl9dgmixZ1jk4R4AeddNkj3PeN5zhqA9OiKhumSy4YfJnkPz/r+7sODSaKVlGo5G9V8e+VU3+/m5UCzh4hJEjClIlB9ZJwAXnh0hipkdGxEzHv8gQ4XSl+csDm1lMxz/YIiciGhE8iyWXr+0ABcFCYGpLj/tANQl0k+XPiVd2hveK75a0tJ70//c2H9h6f4rQoVMOX9ILLggYYGyISfCxCzCYKgMBGKcA1w5vk6WSAwMiVUzCgCCQA/jxcJoN0QB0PePGY6FAdNo/C1uzRmD8EdHVX/g+sev4UCljn9sdcr40bD919rp7e9KJT+240kFbGCAES9nyMV3gSp+CxaCgykpMDkU7MCW2ZpYJxKMU8he9KZnmbApRHtRHUCANCm/dzj+9qsuEEmb979Efjv71UtXueRlBCAaz4DxrAwF5QUeWqtwei4wE79Xsgw2XF4SgBhgpkfpiQiHtgvHKw39lwSAvyrBzx//7XUCv9s9/2rihW1GlRyipPxAoHgWT1w4HEFljB4EMJyDTMAnqFEjtpvfmsiv3d87EbsT4o5ChgE14ZenaecuFJcGa/S/VftPN36+rOZHIzwwSoYMyuLM0HMimgQ8hMgo73IGDo5IRiT1AgROIn7IacSwOwxJkIb+S++K4BDeiGCj9l+eHITRt+NKfnRzwg4MjEAQDDFuxFDRxB9u7jbxF+VFcghyDFiyV/vJ6p5nhdzYf0mefJYCuMl5u+mt4q/mnV4lwjxEEBJhkYI/a/5pns48JtdHp+Nj+v+JtFn9p/zC4BvmomHJFmYpcFt+dVKdRFppxXU9xgibx1/ld/iS3XwAGgDEhnArfvU3d60xzTfPh/Zs2v7TvIPbPCf/BRlCc371GdYmnJcTehvVf8pvjnkvBUOR+VryhzZ9/o2DvxeMuYpRj191UsHyNc4+lk+81XDrxE3N/NcJU9dWB/gtaNZSy8kLs1ci5eXro1ZLWXwb9v/p1Psn3jHmJHaAgaE7338j/ei8rtJG8VfTdh++FFSrHNIRb4B4RjfLjcTM039pGl1T3SKMKiNDbTWo/8q5L9UYvARxQXpG4PLBlQgAs8Fc+E3y0Gevj6QrPyYLbJo3elpp4r9y7guqJBABCZjISJSBY7KiIp4Xv7EBdfVGWUI7ST5OL5iEv06+1sn39fE20Vcd6Y1N2n8692D/ZAaGxa08OdjzbAlXnTDR/AMxHONZLB+v/Fz5RVDlCppwTK6XGV/KA76xR+/ef8F+h35G3p52friWJLvekunHsrDnBYSj1n5nLXlFc46/ut/c6up4774JdSbU6zXYvqRZ/ZfuhMEPAlX7L3/7NozsnLNIf/ft2+tuesnMdPTybdCJYL7xo9P78dfp+se/Px33rP7jHzq4UVcN4m+ZNgWMKm20PMlid1dHfM9F5Hl31RvQ0TaLEIHmyC9Pda+5Wvr3bu1WTN6k/afNl/1tmYGhnXpn5Chj5v42O5FnyQVLWA7HgCHj5um/Mb6lGdIBOp2bW0Np4/ovDQ8f+xeYocXUe6aHicdwLrPn7gPxcvR3DhLwHPlpbrKgT+dHqctPlTd6/o1Zfwef4gdaKfnByZuMvC7HhGE4zItfGu1XYwblkoKoya+p/3Tfkuqx87L8eqJ2v/QfaCP1kR8BjudZ/3X+d63UeA35pU36/5TfE/qE/wA8yomG/JjayYCUH8QBbn788pCfouQzVDXBf/9C8Xctdj5/il8hz1ojfmCY5Fz5sSk87lVTfFIuVItaquRY03/Nxz9WddviT/Lzoc5j5WcBMOe6auZvwkI8l/ZLudPwms6frJUW5UvVf6lOXTufzW/Y/nspgd+mYRgrkd/jt0GOzdzih66fKWup2Yr80jrPh53Hf1fLbU9n8ztNXrDyswxndU6pP8qSoG3hOdZ/j9eD9N9ZVoKfGz/Sm/ihec/K9ZczZz5vvXKz+fXD+FKy5wGfv7AsXv1n5SgLk6Y72+znx6/zeKli+VsZPm9TfvNy/z89ov9mb9u5tYuZWkm2kuTgWJTfJjOT4SRwPNp0+sG6ufX/5Z3/pZkS7rz9MrH/5Hj9+ex9N2YyaIf+g4LEDP0HiLHJefDfTxLEc33+fVw13X5pCr+8vgEn9w+b7b+wa9jaJfvZ8ZcEgAFI+Tl2of1nOEyHLuAM5vn8ofymElyaEj8a9j+v19n/L858HtjZzx8JlJIA1I/86FHiIWEhm16bG780HKtDfut3Wn7zcfnVt9n+a4Wpa0+8oZn+SwQOcCauJQIgpxnpdHzAmDk+v5WpuSej7qgNrUj173Paf+t12n9rh+W66Vn8GAAz4Eft518es+Ojb0n0spnn8+/TESidBa5HUGx1DJnduv6r7b+1g8P9XfF2dvkVDCWRH9n+T+I5+I8Jhngu/PJROyMYsAQ1XMofCJb4mvtvvH9Yzfov1XWr5wDP9h88gqwN/EQE77OBobgciXG/mpLf8svVfzXib3qg66bxqfIrkZ9h6V6yFFf5LrHWfwzMlV9MlDBs4856AG7ef1Xbfy1d9+vheHb5JajYUj/TgaxswEN+DNWc+5/VIkvTTXfb+FE7/q4Ffrv+U/7reIOhuklQ71gMCK//wuKgml/9l8RURU+rFlT+P/7L6xqwVvzNw7rBta0XBMYs2WuCygi9e3sdulzEEBE2LkBz9l+epDPXz6yv36r85nX9F8c+LgizRUXJ10OIRAAhwHp4mi+/Ya6if6/Et3Tb9l9er/7TvnvtvDI0k59YqBhO3+AcGziIzJdfudVXUK9CGp0b+y9NasffVsD3BAUcZsnxiC85ZwwYIIYzMOTmXH5Hc4Q6UxcsJGka8m+Vajp+FEL6+th/efXTx9Yuo6kM5qWpaxeGOxQPX6qOKldnjvjpu47/1trnvWyXx+g9039pchBnrqGxHOakiuKmCIev4dmIq/IbAwz88gaJW0ePNDPz98Rl0+eN+ZEeKpo/v6h/moM6LL76KS/5qTSNaiQ7Il0t3Vl7dekmDfXTan6h737VM347SprNYv5xkt//6aSR9GxpHTCROHNd8zdWODdd07EP+v+Un+rH0kTaJ1NrApsaOY/5G9dLfkuV+UPXymXntxTPnV8+M49g8N9kAN5SH9WYxpvu61P1hHHz6oxlq5dcgxP9Nv2X/7j+dLIC7ORjdvlHWZAm1QnFd/wMGPlNJ572Dg+yAfsaNuPfIr880fzTJYdQgLfScYK8qiwh3nYJvp3EvrTVqR56e+XrmctwZCi/KX6av7tsBIdDN9gIcNLZR8xeO/Hcor6dse6D6sUPtuY3F3+TNNNm3EQm/XppGn4MjefJX21V7npwsH/JdcsmCwDz9fHLZ3ajLK3f7ACzVHuL/InosaQPLlV9zzuHx4yasu4uHjzMXfPLqxPCJeEBZKkcGxl6qZ5KdrPT12rGigOq+RTh+NEu7kAm6MuV37wsuOPdnfQ5YqINWAuf3l8j/Cq/Xam58tvzD9kdPbG5u+SXVvhQP8bnsAkjrUeG6584FN+460+Rb+VJOr31p1sWg1FPup/454v57uNHBcIhv/WJ/fFrSJGViS+HA8tV4UP5HVxQXUv55QVhR/hMEfGd8qsxjjY5HlJXpVl19t9U+6Vxy84nHjXEjpn9n9R/BjKKAgxVARoyFUNgAllCARAzQPqnLyp3JPIMuz8wcHAEuC/ML0/zfDQ+PJ5dWVvr5d1hT8rqZUe7VPc5l/xyxuygB9OoJBLA3o0rNaPXmIhNPIdTiiwGJCQEkHHG5sdCbAiG6cv3H6T5526Qr3tSVrX+dg4vGTUkxrF3DzMBMOEcYwkETyVjJjh548gQQeGyAREcsRqVDEDQmYMGTgoA+kdfll+5P+V6OcuoubT6q+w7HTDqiESIdO9/diQsYkhBCpPYcvMwFgcSSJCL7wgivQXwhhjCYglik4GwKx35pfsPkvJRdj2+3TYnUl6xZ84rb1FDXszbE9KUFSB5fv3WCwy8FO/eenL01gOg5x6mfSzPdT2rPP9wwuz0d+EWMZ7tSfjGhTPz/PCkKMTJ23cnhOYEm+LT4eEYCYJuUXgDv54m5argt0umFr/FrTTdXc54uHtssuqZOCbLejVg2zsHQL1z5uWXIbVWdqn3HByzYwkf8wNvCa839dol+9dZkieZl439pLX3xf0XC3A5hnQL963rw29emS+qZvUH/JIe5Nn7jEGL/fDDZJcg5irpdZOXYvvbo02yeTm7au30F+zOWriFHdtu2gtnwnT2163WYbIg8no16aSZt2et3v7Bly+/ZYYp9VJThGpaLb7V/A4G7FFDmizLdvNMjLxpXYp5k7nCt/Nt4tMFx5pTC9S9sLKcdV/Is+x09YLPFoTsSr4teL3gQa+z1oWcZgNiu38swX79S2lfA+YLl98kjTO0JrZ4bmq/TsWsGV10/sqjjgHpYeaZNvoLZGwgKbLY3bb+WUaW2tdEwXkGrAuTHiavhNr9ZFv8cssbPloglnZywXSUbouY7qYFJwMSPGwRC/gL13+TM7SaJOJSxbOn0X759JG3iUX7M2XoTeDg7S8ZmXb3kgtnz3atXkRBgPJz+m5C+b0U2G6g7drpwEj3pRjXDt/T0YK3jkb8oKmTpBAA98Avn0ixV8ZhPWpIa79Op2LPiINQ/dla8YOUg9d/Mx6teYDo9RMWzf5mPUf/oeTn2cjZd4JCkmPm/EKE5Owv0KWGBnT2wprAzxl62BLr7oVfHmvAcfl9Wns397H9tA6YOu3+wLFBLX4vGMYHfoEhgYj+kEGGK9Edjf1nJeRGYhuzhDAl52xbAyMsZ984OvorQ9OcsfKDoZXkUtjdB78Ygn99OkGnpp4O7VcxcrR2EFp/XMt+RtnA+h8iPwYj1G6Q/ELpS+QHM/IfPEb88gssJnu9q+u97jfxmlEXMksyINJCfiJyL/w0q3RvXILXm2Rz1O7+ymnjq1vbLI7xaSk/0ryB+iejR2HJY9cXKz8AN/zk7FsYkv4FP0rWEnX/3yjwIwD/8x2DkgGTkY289YHkXvyXagjRcZD6WirTieZafPWYkuz84EJAqKFY70O9FzzIDhSqL+ZE+ZH5Z37swcFrHD5fYEX919vbOycaTjWPC/6TYxDIvstXL+/h+TeqE0JImYyxtnQ/98pd21o7umcEoU4dZJSfAT3LRPmBjYTyq/y4TI9CJT9xll5/a0n50Upr4ISFiFwsvxzyzxMlx4a9kdAEfHJP9V+edDprPw4n8y7VMZ/O/NPY0YnGq2i9dOvO+2Pq/p2ZKLCLMQTQFFDc3SQQGwrRhUYLu5YX4BGzBEPrv+exqSJM8EfflvlXODkmQwyWR/nAsrsP/yUdzbNcZ5eYEuEwHXpnxqLBw9oPbyBNbTKKvy2BhFCywIGfFUAcupssRsMxLy8Q2VD/sTPqP04uCohxUh5MhFJsNX4wG8cg2z23ci/xN84IGs8zX9djiv7p4q89newxa8259l1RPX5nD4R1/wiiR8mAHcvZY47J7pw40tLtqJ1vcsxJa+gssuqfIyautY4lxl+NH99YBKgWEKaCAz++D35aChXgau1EDUpPY0eaTFcYeAt9V1wLHpycZt7QSnfBIzx/iBMbzKbPHyT2mimmP36Tb1pSflYiK40fcrYgVlHRmB+D+xciYojI9s8Z5j74DbfyjPPM6yncOWtcvhMf3lBX8ig9h/0lySggyQbCp60B/EZyKTg9gH+TDXjjMAn8tHV9U35ZnqWXIlY7+mL81XfDmr8ap5deHqXHDL4XfsPJ5IFgwDjrSPP4SvXGaoCa7aO3es4OjBpywXXZh53sKhMjG0l2fZXssve2m1338pculOlXV92X+YvAK/Owo/Kbn4Pa3daH650Av+T3HRv5Jdvb80fZ3nXwMwP3wS8fF2FlGLU/7Rgq1bc8Ip+x5rdm8VUZeab7lKwcCMi+D6erAxDktB/OzonsVfjvxc5FuO0VnMHpTwxDW+dwfJrr3cfkfvgJQd//3SKYMs3oWfht61Jg7oXfWOnMXA2TAWfmpseHOu2UQHX5kbzr7fqVXRYn9rq3dyzOOpLTXm8gVNDiVe9crgYWK7tCwEZ8Hr4akP7uvWYGJTzbZICXN414vu5dimz0eh9I77svfqken9LkXuXV97eG866MQU0VxCRwBID0VE+ME4EwPJM4YUIZzQl0A55JmMG4ueYEEEsEIsG9lN+qCR6Tr0lok3dWzxs6ZlBtfo4Vn0ziYRAzA57BLMaBzc0wZnmGiGjIj2l4xkxkQCxg0h3V3+rpMtW08xnbZe/vkUVtCQwMILiR4XjdMWDAMHAjZnDDU1JShvARIQYBHsPL9+m/MqdAJFODcTXmzsGOFl/AoaaY470ON5u2O0Y8oYhgaj3GIHY88ZFHwIjAzgD3039VvSV+Pj6mE0yng14LPc+rA0J9ORDPnhZNMyaqMTNAkV0J8N7Wf1RVggrtdhlYNNnC6vDhg1BTZG43m8+AMem/ceVpAJoDv9GqzAa0KkeOBE1kQKWV+IYHjIEginjaghouyTPzHS0quZ3j6t840X7Jp88OXtOuP334aCT3ERt2ZQ4LnsD2sakZN7jH56wHk7m9/+aq4L6tBW/w21Qyb6U68LYr7nd+t5JOGzrIThi/87uddOBowf/O77bqHe5orp7f+d1KeSfk+li7ZNDv/G7Z+DvYP/DsfvffraNvva6/3/lVbBfWOzjnBgCZAAa8Ycho3QexjReJmOKJXmECgR2TA8gTyDu95jjeOXwzDOPseBkxeyJQ/GDZAQbkYQj2q+WXaqYtffZlapKfFyRgZgOAuYAzkQhcQZaoXIBo4AwJyAt58maIBgx2YFF4YEVOxtKQqAMUIMgwWyFDpNwZTr5Wfjrwpnn2FQrqy8E4gmGOFhmydwCRwMHCABZOwC4Cc3DMTsg5gJWqwLHeFNm4AgyAmAAIUSRoLVy86hTwV1x+1w4b75dDYICMJ2sFZMgDzI7EgQpiMkxlrnMmzyzsSSy4EEdBIDHl8zIBzETMbFEYZlAB78AEZiGKXxpxRr5efoc7YdzcNdoOgr0RK1LAGBTKCGxF2Kh2HAMFe5jCG2LPzrGHOOgPCM4TQJ4RDoXC5AyBjWEnEFcAZD30K2PjvYadsWKJ8H+pOw/eNLamjyeKZcdWu6O5OsR8CkZ/NLCr8pRcuX2KezTRIbaa0UYcWJWn+JXXtlrQWhBbLYiIjfmUL6vb+8VvefDQO/w0Z8t//szZUH7/VRRFPXzXCccB98tS4ByYQANyvbF58uxJmNmLMcOJ+uDAzb5KVVknPoyTPJpjXAcwQRyEwSTqWNiIlQnMZzNiiKmDZyKRAPGOwqbyq6eJPxyLX4+fpTEOlKDKatgmbpgFMLNjIQeBmSkDYOJGplrE426Mi3QnehbeBZjJxNQ7sECEhB16YzhDc47AacYOMFaBinlhbCq/1crj6sTWrdrwm4WWzdz27xdnCxwvyw4/LMeyXMCaI26O3MI/JNW8+fCwnKWZwwh7nTK5Ti8hdDY60GqBs4fT8f7kdDlZTmQ6wmhpH/dCtfDJ7P5+0tibNXNjO8stvR/g9ME2lN/RsJ6pB+sKp7g1kRh4W/l5HGInXrfCTv66kUfmeG9Fle3KQZXnrRjzm05GfI3j9hxx/wIOsXrei+d8GO/7new8Pqu205tqvhO3b0e9fO7q+/LmXhnjc/ExjlrFRxeXf9tQflfDNeu+dTiWD8bJ3zBqlR/CFNchb9luuJjaPWkuSaaDmF7kyNslsKz57VTXndJishf9/kXyelo2HvrayRrZZ0S9bs478+PQfzXuZSKdrJK4/zq5ROTVWd4dvzkdJdkm8vvrN/94y1nX4ydE7yUkL7DXsjd2y7u4WfGT7ffFM7NPebq3dfC+M392fvilncWXaSZ8WKE9R5Hu5dj/F29/tlfLbU2zTs0PJ92df2bbOOhkaTGX+r6YvE7/pZHTF8i/tC/OXp5vb2b+HcXVYSGO/JqlozelnF6s+PHX/B7HK368i+2piTJuJxew9ofyBmiV7xFrfifgV6XuJf8SXr1s+4O9rTI0V/wqFMgbmfAKf7d0ySW+4fcivZRI+y9w0ipbZwNgM/nVrYoPx+TWMz2BqDdqPuRh0LJb/oS909WVXd2elvu6X76dHGPcuUK0Sat862I9fk+EGpPTQXohLMfN143J1I3u7gfTfoUoeXOgflcOGrNTGXGjvk8vNd8f8epJo27ZOh2p2Eh+R7V0NbJ1LZ+OSYdXZRUHXT/VqRSx37WBH6TnOybnh/j8134zYvrXvBOm8fCsbzwKeHM0LNNMxd7F416MEgvbGfYryl2+8gSWAwySnelO35qLipaumFRxLqiGi+74S//uq/6G8hsOi4UIrRfCDgCcIEGiCRBMubTSAUosQhA4J6SJAFAzK8EqYCnBJGxCbBSYjD1WBwOk5BKAgdUCAsgUcORUUigLeBP5bRXDutep+PV7xdYZC028aqLOIDUjT1LjI5gqTBRJoo6FBGY+qIgae6eEhMDmUZM0j8AW4FBy4AAfCObgBayeFEg0gf7+V/wPD9/1hVPH5ADvmEEQhnMEIWE1dvVBQAFq3kTgxQVyamJsTIGFnQKOGN6R/OBFgvA3t/Ct9KUBRD6QbK5+Wvf6KxbiaX2ACD6AvOfgghc45wVe2ZMEOArMNWQJNSJlqBCZr+/x5ojUgoj37H5Y73sfwk+6sanC/ZDvG8lvq1b+ciP3mGZfAgiLEQAREYgyMxsMgWt6AmGCIxVxTkgBcSBh9mSMIGRgIgj9zObhyX1DUcQTyybr90fD2rMLWju+UYhdkP2SA5E4XwMiZ4ZAIDA5kK+ZwYmwKljVCwkkOPbsA4w9E9WnXzUZMak6/uh3JvLbKuq6Wym2Pj9yUAGoNzBIEDjlOJsAwVgncN5EGCu8W4fzj8Mbaz/bsV6uHBc1aw4AGYLHT51u/gc3ah0q4khkc/PvZXG0stybsqy/+ONEFY61hDeoiOCwz85gYCiDTiEMPs3Si6lU2ZsS8kUBdz4HWGEKVgOE5Xf4CLuNrr/9tV57FDN2QmuHWSM0xjGe9YdxlBbPFpRcX6IqJsWwnw4LHeb0rig5fZFmn9B83h27tCtL382nw1FnONr667waDj5H8j/p4flTXuKZmDY3/7aKYVytPfhRnkX7wr4Oz9HJhpO8N68MjfmJzxV7d/3evHc3Wt1O+z7NOq9vHXZflQjtD7Puh4lleWvQLacySmef5+R/J/9MaJOXf1v12uNqIPSY8NaiVnIz7lxUHDvlUsYdX2F4KtsoPqH9MKLu6FOmycsdrhTbra0T6t5fvOnMi7uiZe1xdbc3PaiUyT3d+nnxjfL3qPQjbnHLpnkni1y1r6LD7fCf5dnQDnDzEe3Z9KZbVDNK+g7vOHneLUnbd3nVmV9Vy5Z1jvaSvTyrwPJ0+X1V1GVfruk9bvx2uZamhvo5NYjm2snQsz3bveXODLE7A7h5IVLh7F/tUqhVvrvsZjmsbV1DegEePmn/xlVRDA8XQo/C56hxeF5LK9knqdpbw6CX2jnIP5c7cdAYDtN4mBzGu5heOj6Pxbw7C9wuP2SdeRXzr8vOyx07j4OKnzC/r1ZF86vchJgfA1CSh4tdzpLy3i075duxDiiZVUucTMtkepfkC3nI5SGZE+7jA6cmLi1Py2aZLCepf1X25qd5ef+E82/r6nBVN1qIZyJ5RPoJSI3YmYFeWWfijWAC3RaBgiECgYkxwUP3QU49nHiwV35VNgZsCHiq/LbqPsV1twPxQvIIgFoTZIGB2Xrn0UBeVOAGpB41YCNlARsx1Il6gEhZPbNI76iwwMxPOP+OYj3HJTumx+SfV6Hg2RsHMROCCFNQJ1yaifdBPDuCERvVt1g5MDuQkFgIgMHInD1VfrXycvhup/yfToGiJjUDEvcLocnpf7d3FyrS5EAcwJGc4IRA3iMEBudsoOs1mpUnGEh2I2cN/z+Lrg0OpytveaTP/brOvtmvisEG/1F0rCpJOf38jvvv7FPJJ18/KVj029Ejx78RP7RSfn9rwviTFE3GNxZOwG9P8tDvNfw7kX7ca/rl8ftv7UqN3/1d++/E/aQRh6sx/u0oMf9Wv2VZtXJ6qfXPVGJ4SD/utf1LD6Ck3+itzP132n5BuVY8p7+Ze7+RY+m36XqUl5J/QZRtmWx6G0hSLIZ3z07AD1Diug+e9vhNyPKTA8ke6UV+/0SBZU62YdD7ZwSkDg/RGO6nbEu/Zdz9TEEl8VBjGg2C7keyHxvZZn7uFxq1vb0+0GgI9xPl+sbCWTQIul+gqh56xaTl3Mj9BmVbcGabO7tfABvl+cym534CKnEbTeF+AaQOU3I/WwiBBdfF8vlzvxAAUqaaPf+s+35kuzb6uR+x7pvuUvTx1xBCxUe95qB6/hlijwaVyTh0uJ+QWIZ+T052P9OZ+aKYehmP59/2eJcAPur3vNSY3M9SL8km314UUdzPwqecz6rlVNH9goBrr1te76x3v80rN2U7zLa5i/u9LSA4fB6jqSbK/UCid/pGQwa6X4AqD/h87Uh3P9PKA5xSLgY+9wsklbi2tWq5nwAkn2tOhjJu9wsAyHa7s+Se+wWA0OE6puJ+xgsSVeazaAn3CyBJHE1Dr/sFgmwyrS/jFfezjb1Xo2nP2f0CAaU81Jw8/4wrD3Ieq8XO/fYk24Lb2h9FcD9DsSRV355sdO4njYDM19X9zI0yxLFm97Ps2RNC7cWmo/ttv1g8CInG+Viyf/8MIVDqMjykGqP7mQ58qZzOUnI/W58Hscd1jWPy8cNS68dGmK7YcL939x1voW3Xz/0CQVGZj9X9DPEum1IXHJNl6ud+QlJVprOSY3K/7QsPkpD5rGTDmZH7CQASx7rbWKvmfu92PtVG8rnuLmNO2f22hYAgZYqGcL+392Rjn7q4nyWETQnBQ3U/63Ev8NZzKu5n4JNGkMt8VrP7mXpkqCptrDm5n2ndQVUcS3G/7RHQqNThueazGt3PsOVHUqY+dHj+WWoNqIo+dmxetrlfYANJNsuen/vtVzuyPafduFXQ/QIJktr6xDl5/lnaK6nE2qBaXje/bwCuDbR1KdBJNQAAAABJRU5ErkJggg==’ alt=’Merge PDF to JPG’ /><span>►</span></a>» allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»» title=»Merge PDF to JPG»>
Часто задаваемые вопросы
org/Question»>
1
❓ Как объединить PDF в JPG?
Во-первых, вам нужно добавить файл для слияния: перетащите файл PDF или щелкните внутри белой области, чтобы выбрать файл.
2
⏱️ Сколько времени занимает объединение PDF в JPG?
Это слияние работает быстро. Вы можете объединить PDF в JPG за несколько секунд.
3
🛡️ Безопасно ли объединять PDF в JPG с помощью бесплатного слияния?
Конечно! Ссылка для скачивания файлов JPG будет доступна сразу после объединения. Мы удаляем загруженные файлы через 24 часа, и ссылки для скачивания перестают работать по истечении этого периода времени. Никто не имеет доступа к вашим файлам. Объединение файлов (в том числе PDF в JPG) абсолютно безопасно.
4
💻 Могу ли я объединить PDF в JPG на Mac OS, Android или Linux?
Да, вы можете использовать бесплатное приложение Merger в любой операционной системе с веб-браузером. Наше слияние PDF в JPG работает онлайн и не требует установки программного обеспечения.
5
🌐 Какой браузер мне следует использовать для объединения PDF в JPG?
Вы можете использовать любой современный браузер для объединения PDF в JPG, например, Google Chrome, Firefox, Opera, Safari.
Быстрый и простой способ объединения
Загрузите документы и нажмите кнопку «ОБЪЕДИНИТЬ». Он объединит ваши файлы документов в один и предоставит вам ссылку для загрузки объединенного документа. Выходным форматом будет выходной формат вашего первого документа. Все файлы обрабатываются на наших серверах. Для вас не требуется установка плагинов или программного обеспечения.
Качество слияния
. Все файлы обрабатываются с помощью API-интерфейсов Aspose, которые используются многими компаниями из списка Fortune 100 в 114 странах.
Другие поддерживаемые слияния
Вы также можете объединять файлы других форматов. См. список ниже.
PDF в PDF
PDF в DOC
PDF в Word
PDF в Excel
PDF в PPT
PDF в PowerPoint
PDF в HTML
PDF в J PG
PDF в PNG
PDF в TIFF
Как преобразовать несколько файлов PDF в JPG в Photoshop?
Существует несколько различных способов преобразования нескольких PDF-файлов в JPG в Photoshop. Один из способов — использовать функцию «Сохранить как». С помощью этого метода вы можете сохранить каждый PDF-файл как файл JPEG по отдельности.
Для этого откройте первый PDF-файл, который вы хотите преобразовать, в Photoshop. Затем перейдите в «Файл» > «Сохранить как».
В диалоговом окне «Сохранить как» убедитесь, что в раскрывающемся меню «Формат» выбран параметр «JPEG». Вы также можете настроить качество JPEG, изменив значение рядом с параметром «Качество».
После этого нажмите «ОК» и дайте имя файлу JPEG. Повторите этот процесс для каждого PDF-файла, который вы хотите преобразовать.
Еще один способ конвертировать несколько PDF-файлов в JPG — использовать функцию «Пакетная обработка» в Photoshop. Этот метод позволяет выбрать группу PDF-файлов и сразу преобразовать их все в JPEG.
Чтобы использовать этот метод, сначала выберите «Файл» > «Автоматизация» > «Пакетная обработка». В диалоговом окне «Пакетная обработка» щелкните раскрывающееся меню рядом с «Входные файлы». Отсюда выберите папку, содержащую все файлы PDF, которые вы хотите преобразовать.
Затем щелкните раскрывающееся меню рядом с «Выходная папка». Выберите, где вы хотите сохранить файлы JPEG.
После этого убедитесь, что в выпадающем меню «Формат» выбран «JPEG». Вы также можете изменить качество своих файлов JPEG, отрегулировав значение рядом с параметром «Качество».
Когда вы будете готовы, нажмите кнопку «ОК», и Photoshop начнет конвертировать ваши PDF-файлы в JPEG-файлы.
Существует несколько различных способов преобразования нескольких PDF-файлов в формат JPG в Adobe Photoshop. Один из популярных методов известен как «Сохранить как», когда пользователи просто открывают каждый файл PDF один за другим и выбирают «JPEG» в раскрывающемся меню «Формат» в диалоговом окне «Сохранить как».
Это позволит пользователям индивидуально называть каждый тип выходного файла изображения, чтобы их можно было легко отличить друг от друга позже, что важно, если в этом процессе будут созданы сотни или даже тысячи файлов изображений.
Еще один способ работы — который, возможно, более эффективен — это использование так называемой «пакетной обработки» в Adobe Photoshop.
Как преобразовать несколько PDF-файлов в JPG с помощью Adobe Photoshop?
Этот конкретный метод позволяет пользователям выбрать группу файлов PDF, а затем преобразовать их все в формат JPG одновременно; вместо того, чтобы делать это по одному, как с «Сохранить как».
Чтобы использовать этот метод, откройте Adobe Photoshop и выберите «Файл» > «Автоматизация» > «Пакетная обработка».
СОВЕТ ДЛЯ ПРОФЕССИОНАЛОВ: Если вы используете Adobe Photoshop для преобразования нескольких файлов PDF в формат JPG, имейте в виду, что каждая страница PDF будет сохранена как отдельный файл JPG. Кроме того, любые слои или аннотации, присутствующие в исходном файле PDF, будут потеряны в процессе преобразования.
При этом появится новое окно под названием «Пакетная обработка», которое содержит множество различных настроек и параметров, которые пользователи могут настраивать и изменять в соответствии со своими потребностями.
Однако для наших целей все, что нам нужно сделать, это выбрать нашу входную папку (содержащую все наши исходные файлы PDF) из-под того места, где написано «Входная папка».
Затем мы можем выбрать, куда мы хотим, чтобы наши недавно преобразованные файлы JPG выводились также в «Папке вывода», которая обычно находится где-то на нашем рабочем столе для быстрого доступа позже.
Единственная другая настройка, о которой нам нужно беспокоиться на данный момент, по крайней мере, это изменение «Формат» с его текущей настройки (скорее всего, «PDF») на слишком «JPEG», чтобы Adobe Photoshop также знал, какой формат файла мы хотим получить в конечном результате. быть в.
Вы также можете увидеть параметр «Качество» рядом с надписью «Формат», который, по сути, просто указывает, насколько большими или маленькими будут наши выходные файлы изображений после их преобразования из PDF в JPG.
Настройки более низкого качества приведут к гораздо меньшему размеру файла изображения, но, очевидно, при более низком разрешении / более низком качестве в целом, тогда как выбор настроек максимального качества приведет к увеличению размера файла изображения, но также к лучшему разрешению / качеству в целом.
В конечном итоге это зависит от личных предпочтений, а также от того, какие настройки пользователи хотят применить здесь, но если нет каких-либо конкретных требований, установленных заранее; обычно мы рекомендуем просто оставить настройки на максимальное качество, поскольку в любом случае на большинстве современных компьютеров/ноутбуков с большими жесткими дисками/твердотельными накопителями и т.
Привет! Это Т—Ж, самый большой и честный журнал про ваши деньги
Мы больше не можем смотреть, как люди теряют деньги из-за веры в обещания и гарантии доходности.
Разумные инвестиции — это когда вы оцениваете не гарантии, а сами механизмы, которые умножат ваши деньги. Это про то, что не стоит покупать акции «Теслы» только потому, что Илон Маск красавчик, у всех на слуху и обещает совершить прорыв. И про то, что не стоит покупать или продавать акции только потому, что их покупают или продают другие.
Об этом и будут наши уроки: как понять принципы биржи, выбирать не по наитию и трезво оценивать, какие инвестиции подходят именно вам, а какие — не очень.
Этот курс — минимальная база знаний об инвестициях. Ее достаточно, чтобы сделать первый шаг
Вы узнаете, как инвестиции помогают сохранять деньги
Наша религия такова: самое важное — чтобы наши читатели не потеряли деньги. Поэтому расскажем о том, как вкладывать долгосрочно и безопасно. Мы не будем учить вас играть на бирже и спекулировать.
Соберете свой первый портфель
Объясним, как работают базовые вещи: акции, облигации, ETF, ОФЗ, дивиденды, ИИС. Если теряетесь в этих словечках — курс точно для вас.
Научитесь принимать решения самостоятельно
Еще будут основы про риски, реальную доходность, про стратегии. Только без иллюзий: никто не сделает из вас Уоррена Баффета — ни мы, ни тот парень из инстаграма в арендованной тачке.
Будете готовы к обвалам и коронавирусам
Мы не научим вас зарабатывать на растущем долларе, на всеобщей панике или на других авантюрах. Зато расскажем, как сделать так, чтобы эти обвалы и паника не били по вашему кошельку.
Уроки пишут проверенные инвесторы вместе с редакцией Т—Ж. Миллионы россиян уже учатся по статьям, которые сделали эти ребята
Миллионы — это не преувеличение. Например, статью о мультипликаторах прочитали 300 тысяч человек. Разбор о том, как работает Московская биржа, — полмиллиона. Таких чисел нет ни у одного журнала про инвестиции в России.
У этих ребят нет задачи что-то вам продать. Они не выполняют чей-то заказ. Они не пропихнут рекламу форекса или собственных курсов про финансы в Инстаграме (они даже не будут навязывать вам брокера, хотя казалось бы).
Но помните — никаких гарантий.
Один урок — 10–15 минут вашего времени
Уроки в текстовом формате. Доступ к ним навсегда.
Примеры, схемки, выводы — чтобы было интересно учиться и легко запоминать
После каждого урока — тесты, в самом конце — экзамен
Этот курс есть в приложении Т—Ж
Скачать на Айфон · На Андроид
После курса вы сможете объяснить инвестиции каждому, кто старше вас в два раза. И кто младше — тоже
Все уроки уже доступны, но проходить их можно только по порядку: мы не хотим, чтобы вы пропустили что-то важное.
Если сомневаетесь, нужен ли вам курс, — пройдите экзамен
Если получится сдать, значит, вы все знаете и без курса — тогда приглашаем вас в наш продвинутый курс «Как зарабатывать на акциях». А если не получится — пройдите курс, после него точно все удастся.
Уроки
Достаём зачёткиЭкзамен: помогите Валере накопить на квартиру
Повод поделиться впечатлениями о курсе — скидка 40% на любой курс
Оставьте отзыв, и мы пришлем на почту промокод со скидкой на любой другой курс Учебника. Промокод действует один раз.
Напишите нам
Если у вас есть вопросы — пишите на [email protected]. Мы читаем все письма и постараемся ответить вам как можно быстрее.
Отзывы студентов
32 отзыва студентов
4.9
из 5
Понравилась подача материала: просто и доступно, без заумностей. Было интересно проходить тесты в конце каждого урока. Экзамен удалось сдать только с третьего раза, надо было вспомнить математику.
После этого курса мне стало понятно, как действовать на бирже. Пойду покупать паи ETF, когда дадут возможность.
Напоследок хотел бы пожелать создателям немного поменять итоговый тест. Возможно, было бы лучше, если там было бы больше вопросов, которые менялись в случайном порядке. Материал подан понятно. К тестам в целом нареканий нет. Для «чайников» самое то.
Ожидания оправдались, были рассказаны основы инвестирования, что несомненно радует.
Конечно, для «старых» инвесторов тут будет мало новой информации (я так думаю), а вот начинающим — самое золото. Уже посоветовал некоторым своим друзьям и близким, кого заинтересовал инвестициями. Так как он бесплатный, то бесспорно стоит того, чтобы его пройти. Понравились тесты в конце уроков и подача материала, особенно на телефоне (есть возможность прослушать курс). Также понравилось то, как систематизировали информацию.
Однозначно советую таким же новичкам, как и я. Полезно и интересно, заставляет задуматься. Все очень доступно, разложено по полочкам, легко найти и разобраться. Проходила также более глубокий курс по инвестициям. Чем больше погружаешься в тему, тем больше хочется разобраться!
Готов посоветовать этот курс всем начинающим. Мои ожидания оправдались с лихвой. Пока я прошел только бесплатный курс. Уверен, что платный будет еще круче. Самое лучшее пособие для начинающих из тех, которые мне приходилось встречать. Просто, понятно и информативно. Подача материала и формат уроков очень дружелюбные!
Я полностью удовлетворен теми знаниями, которые получил, советую всем, кто хочет сохранить свои сбережения, а может даже и приумножить.
Материал подается логично, понятным языком, новые термины и англоязычные слова подробно интерпретируются. Мне понравилось, что в процессе урока приводятся примеры, наглядно поясняющие смысл процесса или инструмента.
Еще 26 отзывов в Сравняторе
Ответы на частые вопросы
В каком формате проходит обучение по инвестициям?
Каждый урок — это лонгрид с иллюстрациями, примерами, фотографиями, схемами и заданиями. Некоторые задания можно выполнить прямо в уроках, а для других понадобятся дополнительные программы или ручка и лист бумаги. А иногда в конце уроков бывает тест для закрепления пройденного материала.
Уроки курса по инвестированию выходят сразу или по отдельности?
Обычно мы публикуем уроки постепенно. Даты выхода уроков — в списке уроков, выше на этой странице. Если дат нет, значит, все уроки уже вышли и можно пройти курс целиком.
org/Question»>
Сколько длится курс по инвестициям?
У курсов нет ограничений по времени: они в текстовом формате, поэтому проходить их можно в удобном темпе.
Можно пройти обучение по инвестициям повторно?
Да, курс можно проходить сколько угодно раз, все материалы останутся у вас.
Я смогу задать вопросы автору курса?
Если возникнут вопросы по теме урока — пишите нам: передадим их авторам курса и постараемся найти ответ.
Команда курса
Написали уроки
Отредактировали
Никита Юкович
шеф-редактор
Полина Гоцманова
корректорка
Саша Кулаев
корректор
Александр Салита
корректор
Оформили
Настя Круглова
дизайнер
Виктор Хоменко
иллюстратор
Валерий Трусевич
верстальщик
Леся Шарахматова
верстальщица
Вячеслав Хохлов
верстальщик
Виктор Корепанов
верстальщик
Организовали
Катя Летова
продюсер
Дополнительное чтение
Еще курсы
Цели и задачи инвестиционной деятельности
Основной целью инвестиционной деятельности, организуемой на предприятии, является обеспечение реальной возможности осуществления инновационного процесса и максимизации рыночной стоимости предприятия. Успешная реализация сформулированной цели достигается посредством решения комплекса задач инвестиционной деятельности, суть и краткое содержание которых можно охарактеризовать следующим образом.
Первая задача, решение которой достигается организацией инвестиционной деятельности на предприятии, заключается в формировании всесторонне обоснованной инвестиционной программы. Суть формирования такой программы состоит в определении перечня тех инвестиционных проектов, которые были предварительно рассмотрены, обоснованы, отобраны и включены в эту программу предприятия в целях последующей их реализации. В процессе формирования инвестиционной программы необходимо учитывать ряд специфических обстоятельств и ограничивающих условий, важнейшими из которых являются следующие:
инвестиционные проекты, включаемые в эту программу, имеют, как правило, реальный характер, то есть для их реализации необходимо привлечение реальных инвестиций;
обязательный учет объективных ограничений инвестиционной деятельности как по объему инвестиционных ресурсов, так и по реальным возможностям предприятия по их освоению в конкретный календарный период.
Вторая задача, суть которой заключается в определении объемов потребностей в инвестиционных ресурсах, необходимых для реализации утвержденной инвестиционной программы предприятия в конкретном плановом периоде. Эта задача решается путем сбалансирования объемов привлекаемых инвестиционных ресурсов с прогнозируемыми объемами потребности в них.
Третья задача заключается в поиске и предварительно обоснованном отборе источников инвестиционных ресурсов, благодаря которым будут покрываться потребности в них. Особое значение для успешного решения этой задачи имеет обоснование схем финансирования отдельных реальных проектов и оптимизация структуры источников привлечения ресурсов для осуществления инвестиционной деятельности предприятия в целом, а также разработка системы мер, направленных на привлечение различных форм инвестиционного капитала из предусматриваемых источников.
Четвертая задача направлена на обеспечение инвестиционной поддержки высоких темпов развития операционной деятельности предприятия, которая реализуется на основе определения потребностей в инвестиционных ресурсах, направляемых на достижение высоких темпов расширенного производства внеоборотных операционных активов и реализацию на этой основе стратегических целей по повышению эффективности производственной деятельности.
Пятая задача, суть которой заключается в достижении в процессе инвестиционной деятельности максимальной доходности (прибыльности) инвестиций (как реальных, так и финансовых) и инвестиционной деятельности предприятия в целом при предусматриваемом уровне инвестиционного риска, решается за счет выбора предприятием наиболее эффективных проектов, принятых к реализации. Поскольку, как указывалось выше, максимальный уровень доходности инвестиций сопряжен с таким же уровнем риска, то достижение максимальной доходности инвестиций должно обеспечиваться в пределах допустимого уровня инвестиционного риска.
Шестая задача, заключается в обеспечении минимизации инвестиционного риска отдельных видов инвестиций при условии сохранения предусмотренного уровня их доходности. Если уровень прибыльности инвестиций, вкладываемых в тот или иной инвестиционный проект, заранее запланирован или задан, то важной задачей в этих условиях является снижение уровня инвестиционного риска как отдельных проектов, так и инвестиционной программы предприятия в целом. Минимизация уровня инвестиционного риска может быть достигнута на основе диверсификации инвестиционных проектов и путем страхования этих рисков.
Седьмая задача сводится к оптимизации ликвидности инвестиций при необходимости изменений внешних и внутренних условий осуществления инвестиционной деятельности предприятия. Поскольку в реальной действительности нередки изменения внешней среды (инвестиционный климат страны, конъюнктура инвестиционного рынка) и динамика внутренних условий (смена стратегических целей развития или финансового потенциала предприятия), что может привести к снижению или даже потере ожидаемого уровня доходности отдельных инвестиционных проектов, то это обусловливает необходимость своевременного реинвестирования капитала в наиболее доходные объекты инвестирования, обеспечивающие необходимый (запланированный) уровень эффективности инвестиционной деятельности. Важнейшим условием обеспечения возможностей такого реинвестирования капитала выступает оптимизация уровня ликвидности сформированной предприятием инвестиционной программы в разрезе составляющих ее инвестиционных проектов. Речь идет именно об оптимизации ликвидности, так как ее максимизация может привести к снижению эффективности инвестиционной деятельности, а минимизация – к сокращению возможностей инвестиционного маневра и даже к потере платежеспособности при нарушении финансового равновесия в процессе инвестирования.
Восьмая задача заключается, с одной стороны, в формировании достаточного объема инвестиционных ресурсов и оптимизации их структуры, а с другой – в обеспечении финансового равновесия предприятия в процессе его инвестиционной деятельности. Ее решение осуществляется на основе сбалансирования объема привлекаемых инвестиционных ресурсов с запланированными объемами инвестиционной деятельности. Важную роль при этом играет обоснование схем финансирования отдельных инвестиционных (и в первую очередь – реальных) проектов и рационализация структуры источников инвестиционных ресурсов для осуществления всей инвестиционной деятельности предприятия. При этом необходимо отметить, что все указанное выше достижимо при условии сохранения финансового равновесия предприятия. Связано это с тем, что процесс инвестирования осуществляется со значительным отвлечением финансовых средств и, как правило, на длительный период. Все это вызывает необходимость прогнозировать меру воздействия инвестиционной деятельности на уровень финансовой устойчивости и платежеспособности предприятия.
Что такое ROI (возврат инвестиций) и как он рассчитывается?
Возврат инвестиций (ROI) относится к сумме заработанных вами денег, которая может быть напрямую связана с расходом или серией расходов.
Для каждой инвестиции вы должны определить целевую рентабельность инвестиций и отслеживать ее эффективность.
Существует несколько способов измерения рентабельности инвестиций в зависимости от типа анализа, который выбирает ваша компания.
Эта статья предназначена для руководителей и владельцев бизнеса, которые хотят понять, что такое рентабельность инвестиций и как ее рассчитать.
В бизнесе немногие концепции так же важны, как рентабельность инвестиций (ROI). Поговорка о том, что «вы должны тратить деньги, чтобы делать деньги», часто верна, но только в том случае, если вы предусмотрели потенциальную рентабельность ваших инвестиций. Независимо от того, внедряете ли вы новое программное обеспечение для бизнеса или активно инвестируете в маркетинговую кампанию, конечная цель — заработать больше денег. Понимание того, как рассчитать рентабельность инвестиций, может помочь вам понять, какие инвестиции окупаются, а какие расходы следует просто сократить.
Что такое рентабельность инвестиций?
Возврат инвестиций относится к сумме прибыли, непосредственно связанной с расходом или группой расходов. Компании обычно используют ROI для измерения успеха конкретного проекта или покупки. Если бы владелец бизнеса вложил деньги в рекламную кампанию, он бы проанализировал продажи, полученные с помощью рекламы, и использовал эту информацию для определения рентабельности инвестиций. Если полученные деньги превышают потраченную сумму, прибыль будет называться ROI рекламной кампании.
Инвесторы также хотят знать потенциальную рентабельность инвестиций, прежде чем вкладывать какие-либо средства в компанию. Прогнозирование потенциальной рентабельности инвестиций компании является ключевым фактором для инвесторов, которые, в конце концов, хотят получить прибыль от своих инвестиций.
Что такое годовая рентабельность инвестиций?
Годовая рентабельность инвестиций описывает средний годовой доход от инвестиций в течение нескольких лет. Это показывает, насколько прибыльным является предприятие в целом. Годовая рентабельность инвестиций может помочь вам проанализировать и сравнить эффективность ваших инвестиций в определенные периоды времени.
Почему рентабельность инвестиций важна для бизнеса?
Только умные предприятия, которые разумно тратят деньги и внимательно следят за окупаемостью инвестиций, выживают в долгосрочной перспективе. Некоторые причины, по которым рентабельность инвестиций так важна, включают:
Анализ бюджета: Расчет рентабельности инвестиций может дать вам более четкое представление о том, какие части вашего бизнеса работают неэффективно. Таким образом, вы сможете принимать более обоснованные решения о том, на чем следует сосредоточить свой бюджет.
Более эффективные решения о найме: Отслеживание окупаемости затрат на рабочую силу может помочь сузить критерии при найме новых сотрудников. Имея представление о членах вашей команды, вы сможете найти тех, кто лучше всего подходит для вашего бизнеса.
Долгосрочное бизнес-планирование: ROI поможет вам понять, в чем ваш бизнес лучше всего и где вы можете его улучшить. Благодаря подробной аналитике вы можете более эффективно планировать рост бизнеса и быть более уверенными в своем решении.
Удовлетворение ожиданий клиентов: Отслеживание рентабельности инвестиций также может помочь вам удовлетворить потребности ваших клиентов. Когда эти потребности начнут меняться, рентабельность инвестиций может снизиться. Отслеживание означает, что у вас будет достаточно времени, чтобы изменить свою бизнес-стратегию.
Если вы не видите оптимальной рентабельности инвестиций в какое-то начинание, перестаньте тратить на него деньги — лучше отказаться от него. Продолжать тратить деньги на безнадежные дела — это верный способ остаться без денег и развалить свой бизнес.
Что считается «хорошей» рентабельностью инвестиций?
То, что считается хорошей рентабельностью инвестиций, зависит от инвестиций. Например, когда компания тратит деньги на оборудование, рентабельность инвестиций заключается в производительности. Между тем, расходы на маркетинг требуют рентабельности продаж. ROI, который вы ожидаете от своих усилий по поисковой оптимизации, будет отличаться от ROI, который вы ожидаете от инвестиций в новый завод.
Здоровая двузначная рентабельность инвестиций хороша для начала, и если вы определите рентабельность инвестиций с высоким процентом, вы должны попытаться выяснить, как усилить и расширить эти эффекты. Тщательно подумайте, получаете ли вы вообще рентабельность инвестиций, и будьте реалистами, прежде чем подписывать контракты и тратить деньги. Не делайте крупных покупок сразу — кто-то, обещающий луну, скорее всего, не принесет хороших доходов.
Совет : Перед покупкой убедитесь, что вы правильно изучили все потенциальные инвестиции. Любые инвестиции будут иметь свои плюсы и минусы, и вы должны их измерить.
Ограничения рентабельности инвестиций
Рассчитав рентабельность инвестиций, вы можете многое предвидеть в финансовом отношении, но измерение успеха вашего бизнеса на основе рентабельности инвестиций имеет свои ограничения.
Вот три ограничения, которые следует учитывать.
Денежный поток вашей компании не отражается напрямую на вашей рентабельности инвестиций, поэтому финансовое состояние вашего бизнеса не всегда можно точно измерить, используя только рентабельность инвестиций: «Например, рентабельность инвестиций может составлять 5%, но она может будет терять денежный поток и будет очень дорогостоящим вложением», — сказал Роберт Говро, сертифицированный бухгалтер и главный исполнительный директор (генеральный директор) бухгалтерской фирмы Gauvreau. «Принимая во внимание, что другие инвестиции, которые приносят 4% ROI, могут приносить положительный денежный доход инвесторам». Зависимость исключительно от ROI для оценки финансового состояния проекта дает вам лишь частичное понимание того, что влияет на ваши финансы.
Чтобы рассчитать точную рентабельность инвестиций, вам необходимо иметь четкое представление о ваших будущих расходах: изменения, ROI может быть неточным.
ROI измеряет только финансовый успех проекта: Например, инвестиции в новые компьютеры и технологии для ваших сотрудников могут иметь отрицательную рентабельность инвестиций, но они могут сделать ваших сотрудников более счастливыми и увеличить удержание. ROI проекта или предприятия не учитывает нефинансовые выгоды от инвестиций.
ROI предоставляет конкретную информацию, что означает, что она не всегда касается всей компании. Это полезный расчет, но он не может говорить о качественных, нефинансовых выгодах.
Преимущества расчета рентабельности инвестиций
Понимание вашей прибыли и влияния инвестиций на ваш бизнес очень важно и чрезвычайно полезно при принятии решений для вашей компании.
Вот еще два преимущества, которые обеспечивает расчет рентабельности инвестиций:
Расчет ROI позволяет владельцам бизнеса отслеживать и анализировать краткосрочные и долгосрочные проекты: «Вы можете установить простые цели как для краткосрочных, так и для долгосрочных целей, и ROI можно измерить, если вы быстро достигнете этих показателей. и легко, — сказал Говро.
Определение рентабельности инвестиций поможет вам оценить финансовые показатели вашего бизнеса: Знание рентабельности инвестиций позволяет вашей компании идти по правильному пути, демонстрируя, является ли прибыль вашего бизнеса выше или ниже среднего уровня, сказал Леонард Энг, агент по недвижимости и генеральный директор iProperty Management. Это хорошее напоминание для компаний о необходимости поддерживать стандарты в отношении своих финансов.
ROI — это одна из самых простых для расчета метрик производительности: ROI измеряет стоимость инвестиций и доход, который они приносят. Это общепризнанная финансовая метрика, потому что ее легко понять любому, и она напрямую отражает то, сколько денег вы заработали на тех или иных расходах.
Знание ROI поможет вам лучше понять влияние каждого отдела на вашу прибыль: Поскольку ROI очень просто рассчитать, это один из самых простых способов сравнить эффективность отделов вашей компании. Сравнение ROI отдела в этом году с его ROI в прошлом может помочь вам понять, насколько эффективно он работает.
Рестораны выигрывают от мобильных POS-систем, потому что они просты в использовании, позволяют быстро оформить заказ и улучшить обслуживание клиентов.
Совет: Помните, что не все отделы должны обеспечивать рентабельность инвестиций. В то время как ваша команда по продажам в идеале должна генерировать большую рентабельность инвестиций, ваш отдел кадров, скорее всего, этого не сделает, даже если он выполняет критически важную функцию. Учитывайте контекст при использовании ROI для определения эффективности отделов.
Формула рентабельности инвестиций
Для расчета ROI нужно взять прибыль от инвестиций, вычесть стоимость инвестиций и разделить результат на стоимость инвестиций:
ROI = (прибыль – затраты) / затраты
Например , допустим, вы совершаете крупную покупку, например покупаете дом.
«Вы покупаете свой дом за 1 миллион долларов», — сказал Говро. «Прожив в своем доме три года, вы продаете его за 1 120 000 долларов. В результате через три года стоимость вашего дома увеличилась на 120 000 долларов».
Если мы будем следовать формуле ROI = (прибыль – затраты) / затраты, мы обнаружим, что рентабельность инвестиций составляет 12%.
Другим примером рентабельности инвестиций могут быть инвестиции в фондовый рынок, сказал Говро. Если вы инвестируете 100 000 долларов США в акции компании, а через 12 месяцев она вырастет до 160 000 долларов США, ваша рентабельность инвестиций составит 60 %, потому что:
Для определения ROI используйте простую формулу ROI = (прибыль – затраты) / затраты.
Используйте рентабельность инвестиций для более эффективного роста
Понимание ROI любого проекта или маркетинговой кампании помогает в определении успешных методов ведения бизнеса. Многие компании используют ROI для определения методов маркетинга и рекламы, которые приносят наибольшую отдачу на основе предыдущих успехов. Таким образом, ROI становится не только показателем прошлого успеха, но и оценкой на ближайшие месяцы.
ROI может быть применен к большинству областей вашего бизнеса и работает как простой, но эффективный метод измерения вашей производительности. Использование его в сочетании с нечисловыми данными, такими как удовлетворенность сотрудников, может дать вам некоторые идеи о том, как развивать свой бизнес. При правильном использовании ROI вы можете максимально использовать свои ресурсы для долгосрочного успеха.
Что такое инвестиционная деятельность? Как отразить инвестиционную деятельность в отчете о движении денежных средств
Статьи
4 Мин. Читать
30 марта 2023 г.
Инвестиционная деятельность является одной из основных категорий операций с чистыми денежными средствами, которые предприятия отчитываются в отчете о движении денежных средств. Инвестиционная деятельность в бухгалтерском учете относится к покупке и продаже долгосрочных активов и других бизнес-инвестиций в течение определенного отчетного периода. Инвестиционная деятельность компании, о которой сообщается, дает представление об общих прибылях и убытках от инвестиций, которые она понесла в течение определенного периода. Инвестиционная деятельность является важным компонентом отчета о движении денежных средств компании, в котором сообщается о денежных средствах, заработанных и потраченных за определенный период времени.
Эти темы помогут вам понять, что такое инвестиционная деятельность и почему она важна для финансовой отчетности:
Что такое денежный поток от инвестиционной деятельности?
Какие примеры инвестиционной деятельности?
Почему важна инвестиционная деятельность?
ПРИМЕЧАНИЕ. Сотрудники службы поддержки FreshBooks не являются сертифицированными специалистами по подоходному налогу или бухгалтерскому учету и не могут давать советы в этих областях, за исключением вопросов поддержки о FreshBooks. Если вам нужна консультация по подоходному налогу, обратитесь к бухгалтеру в вашем регионе.
Что такое денежный поток от инвестиционной деятельности?
Денежный поток от инвестиционной деятельности является строкой в отчете о движении денежных средств предприятия, который является одним из основных финансовых отчетов, составляемых компаниями. Денежный поток от инвестиционной деятельности — это чистое изменение инвестиционной прибыли или убытка компании за отчетный период, а также изменение, возникающее в результате любой покупки или продажи основных средств.
Что такое основные средства?
Основные средства — это имущество и оборудование, которыми владеет предприятие и которые оно использует для получения дохода. Основные средства менее ликвидны, чем оборотные средства, и не предназначены для конвертации в денежные средства в течение года. Некоторые примеры основных средств включают:
Здания и имущество
Транспортные средства
Машины
Компьютеры
Программное обеспечение
Мебель
Каковы примеры инвестиционной деятельности?
Когда бизнес покупает или продает инвестиции, эта деятельность приведет либо к прибыли, либо к убытку в денежном потоке компании. Некоторые из наиболее распространенных бухгалтерских операций, которые появляются в разделе инвестиционной деятельности отчета о движении денежных средств, включают:
Покупка инвестиций: Если бизнес покупает инвестиции за наличные, будь то акции, облигации или другой тип инвестиций, стоимость этих инвестиций будет означать уменьшение денежного потока компании от инвестиционной деятельности. Это потому, что деньги уходят из бизнеса, чтобы покрыть покупку.
Поступления от продажи инвестиций: Когда компания продает одну из своих инвестиций за наличные, продажа приведет к увеличению денежного потока от инвестиционной деятельности. Даже в случае, когда компания теряет деньги на инвестициях, продавая их по цене ниже покупной, денежный поток от инвестиций все равно будет увеличиваться.
Покупка основных средств: Основные средства, включая здания, землю и транспортные средства, обычно приобретаются в кредит, а не за наличные. Из-за этого покупка основных средств обычно медленно проявляется в разделе денежного потока от инвестиционной деятельности с течением времени. Каждый раз, когда компания производит платеж наличными в счет покупки в кредит (например, 1000 долларов в месяц в течение года), это будет отображаться как уменьшение денежного потока от статьи инвестиционной деятельности.
Поступления от продажи основных средств: Когда компания продает основные средства, будь то недвижимость, подержанное транспортное средство или компьютер на запчасти, выручка от продажи отражается как увеличение денежного потока от инвестиционной деятельности .
В физике работа постоянной силы при прямолинейном перемещении вдоль вектора пути находится как скалярное произведение этих векторов:
x cos = x
Основные свойства скалярного произведения
Скалярное произведение 2 векторов имеет 4 основных свойств. Так как практически в каждом примере, где нужно находить скалярные произведения, необходимо хорошо знать свойства, рассмотрим их:
1. Скалярное произведение коммутативное (получается из формулы 1):
x = x
2. Числовой множитель можно выносить за знак скалярного произведения:
x = x x
3. Для произвольных векторов , , :
x + = x + x
4. Скалярное произведение 2 векторов и равняется нулю x тогда, и только тогда, когда один из них нулевой вектор, или когда эти векторы перпендикулярны
Таблица скалярного умножения ортов. Согласно определению 1 x = x x аналогично x = , x , а по свойству (4) x = x = x =
Скалярное произведение векторов в координатной форме
При помощи основных свойств, которые расписаны выше, можем находить скалярное произведение в координатной форме.
Если = , тогда x =
Действительно, при помощи свойств, у нас получается:
+ +
Как помним, произведение одноимённых ортов равняется 1, а разноимённых = 0, тогда получаем форму скалярного произведения в координатной форме:
x =
(3)
Нужна помощь в написании работы?
Мы — биржа профессиональных авторов (преподавателей и доцентов вузов). Наша система гарантирует сдачу работы к сроку без плагиата. Правки вносим бесплатно.
Цена работы
Формулы для нахождения скалярного произведения
Чтобы найти скалярное произведение двух векторов, необходимо знать не только свойства, но и несколько важных основных формул, которые подводят к правильному решению.
Длина вектора
Если в формуле (1) , тогда:
.
(4)
Расстояние между двумя точками
Допустим, есть две точки:
;
.
Находится как длина вектора = по формуле (4):
(5)
Косинус угла между двумя векторами
Косинус угла между двумя векторами получим из формулы (1) с учётом (3) и (4):
=
(6)
Условия перпендикулярности двух ненулевых векторов
и выходит из свойства 4 и формулы (3):
(7)
Проекция вектора на вектор
Проекция вектора на вектор находится с учётом формул (3) и (4):
пр = = .
(8)
пр = = .
(9)
Декартовые прямоугольные координаты вектора в базисе есть его проекциями на соответствующие оси координат.
Действительно, согласно формуле (9) получается:
пр = = = , пр = = , пр = = .
Направляющие косинусы вектора
Направляющие косинусы вектора называются косинусы углов , созданные между вектором и координатными осями .
= = = , = = , =
(10)
Примеры нахождения скалярного произведения и направления векторов
Зная все необходимые формулы, легко найти не только скалярное произведение вектора, но и длину сторон, косинус угла, площадь, модуль вектора и т. д. Посмотрите, как решаются задачи при помощи основных формул, которые рассмотрены выше.
Пример 1
Задача
Найти скалярное произведение векторов:
= и = .
Решение
Исходя из формулы (3) у нас получается:
x =
Следующий пример тоже на нахождение скалярного произведения, но решение будет немного другим, хоть и по той же формуле, что и первый пример. =
Решение
Согласно формуле (4) = . Находим = = = + = , тогда .
Пример 5
Задача
Найти направляющие косинусы вектора и значения выражения .
Решение
=
= = ; = ; = .
= + + = .
Проверим, что для произвольного вектора
= .
Направляющие косинусы вектора полностью определяют направление вектора и они есть координатами единичного вектора , что совпадает за направлением с , то есть:
= = .
Ответ
.
Средняя оценка 5 / 5. Количество оценок: 1
Поставьте вашу оценку
Сожалеем, что вы поставили низкую оценку!
Позвольте нам стать лучше!
Расскажите, как нам стать лучше?
8299
Закажите помощь с работой
Не отобразилась форма расчета стоимости?
Переходи по ссылке
Не отобразилась форма расчета стоимости?
Переходи по ссылке
Полезно
Вычисление площади параллелограмма построенного на векторах онлайн.
Векторное произведение векторов. Смешанное произведение векторов
Словари. Энциклопедии. История. Литература. Русский язык »
Биология »
Вычисление площади параллелограмма построенного на векторах онлайн. Векторное произведение векторов. Смешанное произведение векторов
Площадь параллелограмма, построенного на векторах, равняется произведению длин этих векторов на угол угла, который лежит между ними.
Хорошо, когда по условиям даны длины этих самых векторов. Однако бывает и так, что применить формулу площади параллелограмма, построенного на векторах можно только после расчетов по координатам. Если повезло, и по условиям даны длины векторов, то нужно просто применить формулу, которую мы уже подробно разбирали в статье . Площадь будет равняться произведению модулей на синус угла между ними:
Рассмотрим пример расчета площади параллелограмма построенного на векторах.
Задача: параллелограмм построен на векторах и . Найдите площадь, если , а угол между ними 30°. Выразим вектора через их значения:
Возможно, у вас возник вопрос – откуда взялись нули? Стоит вспомнить, что мы работаем с векторами, а для них . также обратите внимание, что если в результате мы получаем выражение ,то оно будет преобразовано в. Теперь проводим итоговые вычисления:
Вернемся к проблеме, когда длины векторов не указаны в условиях. Если ваш параллелограмм лежит в декартовой системе координат, то потребуется сделать следующее.
Расчет длин сторон фигуры, заданной координатами
Для начала находим координаты векторов и отнимаем от координат конца соответствующие координаты начала. Допустим координаты вектора a
(x1;y1;z1), а вектора b
(x3;y3;z3). Теперь находим длину каждого вектора. Для этого каждую координату необходимо возвести в квадрат, потом сложить полученные результаты и из конечного числа извлечь корень. По нашим векторам будут следующие расчеты:
Теперь потребуется найти скалярное произведение наших векторов. Для этого их соответствующие координаты множатся и складываются.
Имея длины векторов и их скалярное произведение, мы можем найти косинус угла, лежащего между ними . Теперь можем найти синус этого же угла: Теперь у нас есть все необходимые величины, и мы можем запросто найти площадь параллелограмма построенного на векторах по уже известной формуле.
Площадь параллелограмма , построенного на векторах , вычисляется как произведение длин этих векторов на синус угла между ними. Если известны только координаты векторов, то для вычисления нужно применять координатные методы, в том числе и для определения угла между векторами.
Вам понадобится
— понятие вектора;
— свойства векторов;
— декартовы координаты;
— тригонометрические функции.
Инструкция
В том случае, если известны длины векторов и угол между ними, то для того, чтобы найти площадь параллелограмма , построенного на векторах , найдите произведение их модулей (длин векторов), на синус угла между ними S=│a│ │ b│ sin(α).
Если векторы заданы в декартовой системе координат, то для того, чтобы найти площадь параллелограмма , построенного на них, проделайте следующие действия:
Найдите координаты векторов, если они не даны сразу, отняв от соответствующих координат концов векторов, координаты из начал. Например, если координаты начальной точки вектора (1;-3;2), а конечной (2;-4;-5), то координаты вектора будут (2-1;-4+3;-5-2)=(1;-1;-7). Пусть координаты вектора а(x1;y1;z1), вектора b(x2;y2;z2).
Найдите длины каждого из векторов. Возведите каждую из координат векторов в квадрат, найдите их сумму x1²+y1²+z1². Из получившегося результата извлеките корень квадратный. Для второго вектора проделайте ту же процедуру. Таким образом, получится │a│и│ b│.
Найдите скалярное произведение векторов. Для этого перемножьте их соответствующие координаты и сложите произведения │a b│= x1 x2+ y1 y2+ z1 z2.
Определите косинус угла между ними для чего скалярное произведение векторов, получившееся в п. 3 поделите на произведение длин векторов, которые были рассчитаны в п. 2 (Cos(α)= │a b│/(│a│ │ b│)).
Синус полученного угла будет равен корню квадратному из разности числа 1, и квадрата косинуса того же угла, рассчитанного в п. 4 (1-Cos²(α)).
Рассчитайте площадь параллелограмма , построенного на векторах найдя произведение их длин, вычисленное в п. 2, а результат умножьте на число, получившееся после расчетов в п.5.
В том случае, если координаты векторов заданны на плоскости, при расчетах координата z просто отбрасывается. Данный расчет является числовым выражением векторного произведения двух векторов.
На данном уроке мы рассмотрим ещё две операции с векторами: векторное произведение векторов и смешанное произведение векторов (сразу ссылка, кому нужно именно оно) . Ничего страшного, так иногда бывает, что для полного счастья, помимо скалярного произведения векторов , требуется ещё и ещё. Такая вот векторная наркомания. Может сложиться впечатление, что мы залезаем в дебри аналитической геометрии. Это не так. В данном разделе высшей математики вообще мало дров, разве что на Буратино хватит. На самом деле материал очень распространенный и простой – вряд ли сложнее, чем то же скалярное произведение , даже типовых задач поменьше будет. Главное в аналитической геометрии, как многие убедятся или уже убедились, НЕ ОШИБАТЬСЯ В ВЫЧИСЛЕНИЯХ. Повторяйте как заклинание, и будет вам счастье =)
Если векторы сверкают где-то далеко, как молнии на горизонте, не беда, начните с урока Векторы для чайников , чтобы восстановить или вновь приобрести базовые знания о векторах. Более подготовленные читатели могут знакомиться с информацией выборочно, я постарался собрать максимально полную коллекцию примеров, которые часто встречаются в практических работах
Чем вас сразу порадовать? Когда я был маленьким, то умел жонглировать двумя и даже тремя шариками. Ловко получалось. Сейчас жонглировать не придётся вообще, поскольку мы будем рассматривать только пространственные векторы , а плоские векторы с двумя координатами останутся за бортом. Почему? Такими уж родились данные действия – векторное и смешанное произведение векторов определены и работают в трёхмерном пространстве. Уже проще!
В данной операции, точно так же, как и в скалярном произведении, участвуют два вектора . Пусть это будут нетленные буквы .
Само действие обозначается следующим образом: . Существуют и другие варианты, но я привык обозначать векторное произведение векторов именно так, в квадратных скобках с крестиком.
И сразу вопрос : если в скалярном произведении векторов участвуют два вектора, и здесь тоже умножаются два вектора, тогда в чём разница ? Явная разница, прежде всего, в РЕЗУЛЬТАТЕ:
Результатом скалярного произведения векторов является ЧИСЛО:
Результатом векторного произведения векторов является ВЕКТОР : , то есть умножаем векторы и получаем снова вектор. Закрытый клуб. Собственно, отсюда и название операции. В различной учебной литературе обозначения тоже могут варьироваться, я буду использовать букву .
Определение векторного произведения
Сначала будет определение с картинкой, затем комментарии.
Определение : Векторным произведением неколлинеарных векторов , взятых в данном порядке , называется ВЕКТОР , длина которого численно равна площади параллелограмма , построенного на данных векторах; вектор ортогонален векторам , и направлен так, что базис имеет правую ориентацию:
Разбираем определение по косточкам, тут много интересного!
Итак, можно выделить следующие существенные моменты:
1) Исходные векторы , обозначенные красными стрелками, по определению не коллинеарны . Случай коллинеарных векторов будет уместно рассмотреть чуть позже.
2) Векторы взяты в строго определённом порядке : – «а» умножается на «бэ» , а не «бэ» на «а». Результатом умножения векторов является ВЕКТОР , который обозначен синим цветом. Если векторы умножить в обратном порядке, то получим равный по длине и противоположный по направлению вектор (малиновый цвет). То есть, справедливо равенство .
3) Теперь познакомимся с геометрическим смыслом векторного произведения. Это очень важный пункт! ДЛИНА синего вектора (а, значит, и малинового вектора ) численно равна ПЛОЩАДИ параллелограмма, построенного на векторах . На рисунке данный параллелограмм заштрихован чёрным цветом.
Примечание : чертёж является схематическим, и, естественно, номинальная длина векторного произведения не равна площади параллелограмма.
Вспоминаем одну из геометрических формул: площадь параллелограмма равна произведению смежных сторон на синус угла между ними . Поэтому, исходя из вышесказанного, справедлива формула вычисления ДЛИНЫ векторного произведения:
Подчёркиваю, что в формуле речь идёт о ДЛИНЕ вектора, а не о самом векторе . Каков практический смысл? А смысл таков, что в задачах аналитической геометрии площадь параллелограмма часто находят через понятие векторного произведения:
Получим вторую важную формулу. Диагональ параллелограмма (красный пунктир) делит его на два равных треугольника. Следовательно, площадь треугольника, построенного на векторах (красная штриховка), можно найти по формуле:
4) Не менее важный факт состоит в том, что вектор ортогонален векторам , то есть . Разумеется, противоположно направленный вектор (малиновая стрелка) тоже ортогонален исходным векторам .
5) Вектор направлен так, что базис имеет правую ориентацию. На уроке о переходе к новому базису я достаточно подробно рассказал об ориентации плоскости , и сейчас мы разберёмся, что такое ориентация пространства. Объяснять буду на пальцах вашей правой руки . Мысленно совместите указательный палец с вектором и средний палец с вектором . Безымянный палец и мизинец прижмите к ладони. В результате большой палец – векторное произведение будет смотреть вверх. Это и есть правоориентированный базис (на рисунке именно он). Теперь поменяйте векторы (указательный и средний пальцы ) местами, в результате большой палец развернётся, и векторное произведение уже будет смотреть вниз. Это тоже правоориентированный базис. Возможно, у вас возник вопрос: а какой базис имеет левую ориентацию? «Присвойте» тем же пальцам левой руки векторы , и полУчите левый базис и левую ориентацию пространства (в этом случае большой палец расположится по направлению нижнего вектора) . Образно говоря, данные базисы «закручивают» или ориентируют пространство в разные стороны. И это понятие не следует считать чем-то надуманным или абстрактным – так, например, ориентацию пространства меняет самое обычное зеркало, и если «вытащить отражённый объект из зазеркалья», то его в общем случае не удастся совместить с «оригиналом». Кстати, поднесите к зеркалу три пальца и проанализируйте отражение;-)
…как всё-таки хорошо, что вы теперь знаете о право- и левоориентированных базисах, ибо страшнЫ высказывания некоторых лекторов о смене ориентации =)
Векторное произведение коллинеарных векторов
Определение подробно разобрано, осталось выяснить, что происходит, когда векторы коллинеарны. Если векторы коллинеарны, то их можно расположить на одной прямой и наш параллелограмм тоже «складывается» в одну прямую. Площадь такого, как говорят математики, вырожденного параллелограмма равна нулю. Это же следует и из формулы – синус нуля или 180-ти градусов равен нулю, а значит, и площадь нулевая
Таким образом, если , то . Строго говоря, само векторное произведение равно нулевому вектору, но на практике этим часто пренебрегают и пишут, что оно просто равно нулю.
Частный случай – векторное произведение вектора на самого себя:
С помощью векторного произведения можно проверять коллинеарность трёхмерных векторов, и данную задачу среди прочих мы тоже разберём.
Для решения практических примеров может потребоваться тригонометрическая таблица , чтобы находить по ней значения синусов.
Ну что же, разжигаем огонь:
Пример 1
а) Найти длину векторного произведения векторов , если
б) Найти площадь параллелограмма, построенного на векторах , если
Решение : Нет, это не опечатка, исходные данные в пунктах условия я намеренно сделал одинаковыми. Потому что оформление решений будет отличаться!
а) По условию требуется найти длину вектора (векторного произведения). По соответствующей формуле:
Ответ :
Коль скоро спрашивалось о длине, то в ответе указываем размерность – единицы.
б) По условию требуется найти площадь параллелограмма, построенного на векторах . Площадь данного параллелограмма численно равна длине векторного произведения:
Ответ :
Обратите внимание, что в ответе о векторном произведении речи не идёт вообще, нас спрашивали о площади фигуры , соответственно, размерность – квадратные единицы.
Всегда смотрим, ЧТО требуется найти по условию, и, исходя из этого, формулируем чёткий ответ. Может показаться буквоедством, но буквоедов среди преподавателей хватает, и задание с хорошими шансами вернётся на доработку. Хотя это не особо натянутая придирка – если ответ некорректен, то складывается впечатление, что человек не разбирается в простых вещах и/или не вник в суть задания. Этот момент всегда нужно держать на контроле, решая любую задачу по высшей математике, да и по другим предметам тоже.
Куда подевалась большая буковка «эн»? В принципе, её можно было дополнительно прилепить в решение, но в целях сократить запись, я этого не сделал. Надеюсь, всем понятно, что и – это обозначение одного и того же.
Популярный пример для самостоятельного решения:
Пример 2
Найти площадь треугольника, построенного на векторах , если
Формула нахождения площади треугольника через векторное произведение дана в комментариях к определению. Решение и ответ в конце урока.
На практике задача действительно очень распространена, треугольниками вообще могут замучить.
Для решения других задач нам понадобятся:
Свойства векторного произведения векторов
Некоторые свойства векторного произведения мы уже рассмотрели, тем не менее, я их включу в данный список.
Для произвольных векторов и произвольного числа справедливы следующие свойства:
1) В других источниках информации данный пункт обычно не выделяют в свойствах, но он очень важен в практическом плане. Поэтому пусть будет.
2) – свойство тоже разобрано выше, иногда его называют антикоммутативностью . Иными словами, порядок векторов имеет значение.
3) – сочетательные или ассоциативные законы векторного произведения. Константы безпроблемно выносятся за пределы векторного произведения. Действительно, чего им там делать?
4) – распределительные или дистрибутивные законы векторного произведения. С раскрытием скобок тоже нет проблем.
В качестве демонстрации рассмотрим коротенький пример:
Пример 3
Найти , если
Решение: По условию снова требуется найти длину векторного произведения. Распишем нашу миниатюру:
(1) Согласно ассоциативным законам, выносим константы за переделы векторного произведения.
(2) Выносим константу за пределы модуля, при этом модуль «съедает» знак «минус». Длина же не может быть отрицательной.
(3) Дальнейшее понятно.
Ответ :
Пора подбросить дров в огонь:
Пример 4
Вычислить площадь треугольника, построенного на векторах , если
Решение : Площадь треугольника найдём по формуле . Загвоздка состоит в том, что векторы «цэ» и «дэ» сами представлены в виде сумм векторов. Алгоритм здесь стандартен и чем-то напоминает примеры № 3 и 4 урока Скалярное произведение векторов . Решение для ясности разобьём на три этапа:
1) На первом шаге выразим векторное произведение через векторное произведение , по сути, выразим вектор через вектор . О длинах пока ни слова!
(1) Подставляем выражения векторов .
(2) Используя дистрибутивные законы, раскрываем скобки по правилу умножения многочленов.
(3) Используя ассоциативные законы, выносим все константы за пределы векторных произведений. При маломальском опыте действия 2 и 3 можно выполнять одновременно.
(4) Первое и последнее слагаемое равно нулю (нулевому вектору) благодаря приятному свойству . Во втором слагаемом используем свойство антикоммутативности векторного произведения:
(5) Приводим подобные слагаемые.
В результате вектор оказался выражен через вектор, чего и требовалось достичь:
2) На втором шаге найдем длину нужного нам векторного произведения. Данное действие напоминает Пример 3:
3) Найдём площадь искомого треугольника:
Этапы 2-3 решения можно было оформить и одной строкой.
Ответ :
Рассмотренная задача достаточно распространена в контрольных работах, вот пример для самостоятельного решения:
Пример 5
Найти , если
Краткое решение и ответ в конце урока. Посмотрим, насколько вы были внимательны при изучении предыдущих примеров;-)
Векторное произведение векторов в координатах
, заданных в ортонормированном базисе , выражается формулой :
Формула и правда простецкая: в верхнюю строку определителя записываем координатные векторы, во вторую и третью строки «укладываем» координаты векторов , причём укладываем в строгом порядке – сначала координаты вектора «вэ», затем координаты вектора «дубль-вэ». Если векторы нужно умножить в другом порядке, то и строки следует поменять местами:
Пример 10
Проверить, будут ли коллинеарны следующие векторы пространства: а) б)
Решение : Проверка основана на одном из утверждений данного урока: если векторы коллинеарны, то их векторное произведение равно нулю (нулевому вектору): .
а) Найдём векторное произведение:
Таким образом, векторы не коллинеарны.
б) Найдём векторное произведение:
Ответ : а) не коллинеарны, б)
Вот, пожалуй, и все основные сведения о векторном произведении векторов.
Данный раздел будет не очень большим, так как задач, где используется смешанное произведение векторов, немного. Фактически всё будет упираться в определение, геометрический смысл и пару рабочих формул.
Смешанное произведение векторов – это произведение трёх векторов :
Вот так вот они выстроились паровозиком и ждут, не дождутся, когда их вычислят.
Сначала опять определение и картинка:
Определение : Смешанным произведением некомпланарных векторов , взятых в данном порядке , называется объём параллелепипеда , построенного на данных векторах, снабжённый знаком «+», если базис правый, и знаком «–», если базис левый.
Выполним рисунок. Невидимые нам линии прочерчены пунктиром:
Погружаемся в определение:
2) Векторы взяты в определённом порядке , то есть перестановка векторов в произведении , как вы догадываетесь, не проходит без последствий.
3) Перед тем, как прокомментировать геометрический смысл, отмечу очевидный факт: смешанное произведение векторов является ЧИСЛОМ : . В учебной литературе оформление может быть несколько другим, я привык обозначать смешанное произведение через , а результат вычислений буквой «пэ».
По определению смешанное произведение – это объем параллелепипеда , построенного на векторах (фигура прочерчена красными векторами и линиями чёрного цвета). То есть, число равно объему данного параллелепипеда.
Примечание : чертёж является схематическим.
4) Не будем заново париться с понятием ориентации базиса и пространства. Смысл заключительной части состоит в том, что к объёму может добавляться знак минус. Простыми словами, смешанное произведение может быть отрицательным: .
Непосредственно из определения следует формула вычисления объема параллелепипеда, построенного на векторах .
Калькулятор скалярного произведения векторов — [100% бесплатно]
Калькулятор скалярного произведения — это удобный инструмент для тех, кому нужно решать задачи на умножение с использованием векторов. Вместо того, чтобы вручную вычислять скалярное произведение, вы можете просто ввести требуемые значения (два или более вектора здесь) в этот калькулятор векторного скалярного произведения, и он вычислит для вас скалярное (внутреннее) произведение.
Загрузка калькулятора…
Содержание
Как пользоваться калькулятором скалярного произведения?
Калькулятор скалярного произведения — очень простой и понятный инструмент. Если у вас есть необходимые значения, вы можете использовать их для автоматических расчетов. Вот шаги, которые нужно выполнить для этого калькулятора скалярного произведения матрицы:
Сначала введите значения для вектора a: X1 , Y1 и Z1 .
Затем введите значения для вектора b: X2 , Y2 и Z2 .
После ввода всех этих значений решатель скалярного произведения автоматически генерирует для вас значения скалярного произведения и угла между векторами.
Что такое скалярное произведение двух векторов?
Несмотря на удобство калькулятора скалярного произведения, который также известен как калькулятор скалярного произведения двух векторов или калькулятор матричного скалярного произведения, вы можете выполнить расчет вручную. Для этого вы должны нарисовать оба вектора и разделить их углом.
Тогда, если вы попытаетесь вычислить образ скалярного произведения, вы обнаружите, что вам нужно умножить две части, а именно проекцию одного из векторов в сторону направления второго вектора вместе с этим вектором. Поскольку эти части параллельны, результат, который вы получите, является произведением длин обеих частей.
Хотя есть два способа выполнить эту операцию, вы получите один и тот же результат. Другими словами, скалярное произведение получается в результате умножения длин векторов, спроецированных в направлении одного из этих векторов.
Как рассчитать скалярный продукт?
Как упоминалось выше, существует два вида умножения векторов, а именно скалярное или скалярное произведение, представленное как «•» , и перекрестное произведение, представленное как «×». Самая большая разница между этими произведениями заключается в том, что произведение операции с точкой всегда является одним числом, а произведение перекрестной операции всегда является вектором.
Чтобы рассчитать скалярное произведение без калькулятора векторного скалярного произведения, давайте предположим, что мы будем выполнять наши вычисления в трехмерном пространстве. В таком случае вы можете записать каждый из векторов, используя 3 компонента:
a = [a₁, a₂, a₃] b = [b₁, b₂, b₃]
Геометрически говоря, скалярное произведение является произведением величин векторов на значение косинуса угла между векторами. Вы можете выразить это с помощью следующего уравнения:
a•b = |a| * |б| * cosα
Если вы не уверены в величине вектора или в том, как выполнять вычисления, вам лучше использовать калькулятор скалярного произведения двух векторов. Но если вы хотите приложить усилия для расчета вручную, давайте продолжим.
Если угол между двумя векторами равен 90˚, то скалярное произведение всегда будет равно нулю независимо от величины векторов. Точно так же, если у вас есть угол 0˚, что означает, что у вас есть коллинеарные векторы, вы можете найти скалярное произведение, просто перемножая множества.
Алгебраически говоря, скалярное произведение относится к сумме произведений компонентов векторов. Следовательно, если у вас есть вектор с 3 компонентами, ваша формула скалярного произведения будет:
a•b = a₁ * b₁ + a₂ * b₂ + a₃ * b₃
В любом пространстве, имеющем более 3-х измерений, добавьте к суммированию дополнительные члены. Но если вы умножаете векторы в двумерном пространстве, удалите третий член в формуле скалярного произведения.
Вы также можете использовать калькулятор скалярного произведения, чтобы найти угол между двумя заданными векторами, где косинус представляет собой отношение величин векторов и скалярных произведений. Для этого вам понадобится следующая формула:
cosα = a•b / (|a| * |b|).
Если вам интересно, как работает этот решатель скалярных произведений, вам нужно выполнить несколько шагов. Чтобы помочь вам лучше понять это, давайте рассмотрим пример:
Выберите значения для вектора a. Давайте использовать a = [4, 5, -3] .
Выберите значения для вектора b. Давайте использовать b = [1, -2, -2] .
Найдите произведение первых компонентов каждого вектора. Для этого примера решение выглядит так: 4 * 1 = 4,
Найдите произведение средних компонентов каждого вектора. Для этого примера решение выглядит так: 5 * (-2) = -10.
Найдите произведение третьих компонентов каждого вектора. Для этого примера решение выглядит следующим образом: (-3) * (-2) = 6. • Теперь сложите все значения вместе, чтобы найти скалярное произведение: 4 + (-10) + 6 = 0.
Для чего используется скалярное произведение?
Скалярный продукт имеет несколько применений, включая:
Доказательство закона косинусов с помощью скалярного произведения. Когда вы рисуете треугольник, используя 3 вектора, вы можете записать формулу как c = b – a . Если вам нужно решить для c2 , вы можете расширить это уравнение как c² = (b-a)•(b-a) = b•b – b•a – a•b + a•a = a² + b² – |b| * |а| * коса – |а| * |б| * cosa = a² + b² – 2 * |a| * |б| * cosa . Кстати, именно так можно доказать закон косинусов.
С его помощью можно узнать, перпендикулярны ли два заданных вектора друг другу.
Определение различных видов физических величин как скалярных произведений.
Работа как скалярное произведение смещения и силы.
Использование мощности как скалярного произведения скорости и силы.
Использование магнитного или электрического потока как скалярного произведения магнитного или электрического поля на поверхность, через которую оно протекает.
Использование потенциальной магнитной энергии как скалярного произведения магнитного поля и магнитного момента.
dotproductcalculator.com
Введите значения, чтобы найти скалярное произведение двух векторов с помощью калькулятора скалярного произведения.
Vector a: i: j: k:
Vector b: i: j: k:
Dot product calculator calculates the dot product of two vectors a and b in Евклидово пространство . Введите i, j, и k для обоих векторов, чтобы получить скалярное число .
а . b
Калькулятор векторного скалярного произведения показывает пошаговое скалярное умножение.
Изображение предоставлено: «Dot Product» от Math is Fun.
Что такое скалярное произведение
?
Скалярное произведение — это алгебраическая операция, которая берет две последовательности чисел одинаковой длины, обычно координатные векторы, и возвращает одно число.
Геометрически это произведение евклидовых величин двух векторов и косинуса угла между ними.
а . b обычно читается как a точка b.
Скалярное произведение формула
Используйте это уравнение для вычисления скалярного произведения двух векторов, если задана величина (длина).
а ∙ б = | и | × | б | × cos(θ)
Где
| и | длина вектора a
| б | длина вектора b
θ это угол между a и b
Направления векторов
Мы также можем найти скалярное произведение, используя направление обоих векторов.
(A I A J A K ) ∙ (B I B J B K ) = (A I B K ) = (A 63636363636262626263626262626262626262626362626262626262626262626362626262626262626262626263. б к + а к ∙ б к )
Где
i, j, и k относятся к x, y, и z в декартовых координатных плоскостях.
Как найти
скалярное произведение двух векторов?
Скалярное произведение двух векторов можно рассчитать с помощью формулы скалярного произведения.
Метод 1 – направление вектора
Вектор a = (2i, 6j, 4k)
Вектор b = (5i, 3j, 7k)
Подставьте значения в формулу.
а ∙ б = (2, 6, 4) ∙ (5, 3, 7)
(ai aj ak) ∙ (bi bj bk) = (ai ∙ bi + aj ∙ bj + ak ∙ bk ) (2 6 4) ∙ (5 3 7) = (2 ∙ 5 + 6 ∙ 3 + 4 ∙ 7) (2 6 4) ∙ (5 3 7) = (10 + 18 + 28)
Настоящие живые шахматы онлайн с реальными игроками. Не требует регистрации. Просто введите ник (кратко, латинскими буквами, без точек, пробелов и дефисов) и сразу войдёте в мировую сеть шахматистов Chess Hotel. Есть чат, есть список игроков, можно.
Возможные варианты игры: с живым человеком | против компьютера (на этой страничке) | на деньги | скачать на компьютер
Если Вы поклонник шахмат, любитель провести полчасика за шахматной доской, либо профессионал, для которого эта игра стала образом жизни, то этот сайт для Вас! Независимо от того, сколько у Вас свободного времени или какой у Вас опыт игры, Вы всегда.
• Перейти на сайт → • К списку трансляций → играть в шахматы | действующие популярные. Бесплатная игра в шахматы онлайн с живыми людьми! Шахматные турниры, новости, статьи, форум. Бесплатная игра в шахматы с компьютером.
Для выполнения хода.
Случайная игра в шахматы — это вариант игры, при котором система автоматически подыскивает Вам соперника. Когда соперник найден, Вы сразу попадаете в игру. Можно играть без регистрации на.
Играть в шахматы с живыми игроками
Игра в шахматы не терпит спешки. Напротив, она предусматривает даже некую нарочитую медлительность, взвешенность любого своего хода и поступка. Это и немудрено, ведь здесь ошибка в итоге может стоить слишком уж дорого. Данная игра в онлайн шахматы.
Настоящие живые шахматы онлайн с реальными игроками. Не требует регистрации. Просто введите ник (кратко, латинскими буквами, без точек, пробелов и дефисов) и сразу войдёте в мировую сеть шахматистов Chess Hotel. Есть чат, есть список игроков, можно.
Если Вы поклонник шахмат, любитель провести полчасика за шахматной доской, либо профессионал, для которого эта игра стала образом жизни, то этот сайт для Вас! Независимо от того, сколько у Вас свободного времени или какой у Вас опыт игры, Вы всегда.
• Перейти на сайт → • К списку трансляций → играть в шахматы | действующие популярные. Бесплатная игра в шахматы онлайн с живыми людьми! Шахматные турниры, новости, статьи, форум. Бесплатная игра в шахматы с компьютером. Для выполнения хода.
Случайная игра в шахматы — это вариант игры, при котором система автоматически подыскивает Вам соперника. Когда соперник найден, Вы сразу попадаете в игру. Можно играть без регистрации на.
Шахматы онлайн с живыми игроками бесплатно и без регистрации. Просто введите ник и сразу войдёте в мировую сеть шахматистов Chess Hotel. Есть чат. Есть онлайн список игроков, из которого можно выбрать себе оппонента. Можно рассылать приглашения.
Принять приглашение: Просто нажмите на приглашения /нажмите чтоб начать игру/ и игра начнётся. Хотите эту игру на Ваш сайт? Скопируйте код здесь внизу и сохраните на своей web-странице,это позволит Вашим посетителям играть в шахматы прямо на Вашем.
1. Недавно захотел в шахматы сиграть. Вот нашёл неплохую мини-игру, где полностью реализована игра шахматы. К тому же здесь играют живые люди и постоянно есть свободный соперник. К тому же можно выставить максимально время для обдумывания ходов.
В Интернете существует достаточно много игровых серверов, шахматных или частично шахматных (игровые сервера, где имеются другие онлайн игры помимо шахмат, например ), с возможностью игры в шахматы. Как ориентироваться в этом многообразии и найти.
играть в шахматы | действующие популярные игровые сервера Играть в шахматы с компьютером и с живыми игроками бесплатно может любой желающий. Ниже приведены варианты игры онлайн на лучших игровых серверах Интернета и его российского сегмента. Об.
Игры шахматы играть онлайн бесплатно и без регистрации
Игрой ориентированной в первую очередь на интеллигентов считают многие люди шахматы, способствующей развитию стратегического мышления. Но с мнением любителей интеллектуальных занятий когда-то не были согласны европейские властители, епископ из Франции Аид Сюлли и Петр Дамиани католический кардинал. Творением дьявола называли они шахматы и всей своей деятельностью противостояли проникновению умной игры в массы. Но несмотря ни на что двуцветная доска все сильнее притягивала человечество на разных этапах цивилизации, а движение черно-белых фигурок принимали за настоящую магию.
Сегодня шахматы продолжают занимать умы интеллектуалов, которые готовы составлять партии не только на шахматной доске деревянной, но и на игровом поле компьютера, для чего стоит загрузить онлайн-игру. Предлагаемое развлечение «Шахматы с компьютером» позволяют испытать свои мозговые извилины и помериться силами с виртуальным, но очень серьезным противником. Запустить шахматную партию пользователям не составит труда, делают это прямо в браузере, но, как и в настоящей игре, шахматисту понадобится прозорливость, умственные способности и предугадывание очередных ходов соперника.
Как появились шахматы?
Игре интеллектуалов исполнилось уже 15 столетий. Шахматами успели проникнуться непримиримые викинги, таинственные шейхи, русские вельможи, их фанатами становились представители духовенства, политиков и олигархов. Своим названием увлекательное занятие обязано персидскому языку, в переводе с которого означает «шах умер». Первым появлением исследователи называют VI век и Индию, правила и условия шахматной игры менялись на протяжении столетий.
Вариации шахмат имеются в разных странах, в Таиланде это макрук, Японии – секи и шатрандж на Арабском Востоке. Европа открыла для себя эту игру в IX веке, а классическая систематизация правил состоялась лишь к XV столетию, с течением времени появились традиции проведения шахматных турниров.
Игрокам компьютерных шахматных поединков следует ознакомиться с некоторыми специальными терминами, используемыми в игре.
Основные стадии шахматных баталий:
1. «Дебют» сопровождает начальные действия шахматиста, в течение которого игрок выстраивает будущие ходы и готовится к основному поединку. Залогом победы шахматисты считают грамотный старт, научиться ему помогают профессиональные советы или известные публикации профессионалов. Чужие знания помогут правильно сориентироваться в ситуации и реализовать, оптимальны ходы.
2. «Миттельшпиль» необходим для осуществления маневров шахматными фигурками на игровом поле, целью которых станет выигрышная расстановка шахмат. Порой благодаря грамотно проведенной серии рокировок этой стадией и заканчивается партия.
3. «Эндшпиль» это заключительный этап поединка с участием уже оставшихся фигур. Роль пешек и короля становится решающей, завершиться поединок может победой одного из шахматистов либо объявлением «ничьей».
Предлагаемая компьютерная игра «Шахматы с компьютером» позволят поупражняться в интеллектуальной забаве и закончить шахматную партию победой.
No Chess Tomorrow (Онлайн-обучение)
No Chess Tomorrow — рейтинг US Chess Online
Это мероприятие проходит в субботу.
Это мероприятие является частью Гран-при МАК: 11 мероприятий, проводимых с марта по декабрь. Два лучших игрока, завершивших наибольшее количество игр, получат БЕСПЛАТНЫЕ УЧАСТИЯ на ВЕСЬ ГОД в 2024 году!
ДАТА И ВРЕМЯ: , суббота, 13 мая, 10:00 по центральному времени. Это мероприятие открыто для учащихся K-12. Требуется действующее членство в US Chess ( вы можете присоединиться или продлить свое членство здесь ). Затронуты только рейтинги US Chess Online.
ИГРОВОЙ САЙТ: https://lichess.org/ Игроки должны присоединиться к lichess. Членство бесплатное. Lichess Rapid Ratings используются для жеребьёвки.
ФОРМАТ: Одна секция, 6 туров по швейцарке с игроками из К-12 с контролем времени 10+5. Раунды 2, 3, 4, 5 и 6 будут разделены на пары через три минуты после завершения финальной игры. Вы должны войти в систему и присоединиться к турниру, чтобы быть в паре.
ВЗНОС: Плата за ранний вход составляет 40 долларов США до 11 мая. Еще 5 долларов после . Зарегистрируйтесь на сайте: https://www.kingregistration.com/register/NoChessTomorrow. Пожалуйста, укажите правильный адрес электронной почты при регистрации: ссылка и пароль для участия в турнире будут отправлены на этот адрес электронной почты. Если ссылка не будет получена до 8:00 утра следующего дня, свяжитесь с организаторами по адресу [email protected]. Для этого мероприятия ссылки и пароли будут отправлены не раньше 8 мая (понедельник).
СКИДКА НА ВСТУПИТЕЛЬНЫЙ ВЗНОС: Примите участие в любых трех событиях, и вступительный взнос составит всего 30 долларов США за каждое! Для этого отправьте 90 долларов США через PayPal на адрес [email protected]. Также пришлите следующую информацию:
Имя игрока:
USCF ID:
Уровень:
Регистрационный адрес электронной почты (куда отправлять пароли и ссылки):
Адрес (куда отправить трофей в случае выигрыша приза) :
Номер телефона:
выбор приза, если выигран приз (приз, подарочная карта Amazon на 25 долларов или бесплатный вход на будущее мероприятие):
имя пользователя lichess:
ввод событий:
Если вы не используете PayPal, свяжитесь с организаторами по адресу td@ia-chess. com для получения информации о том, как оплатить с помощью Zelle или Venmo.
ПРИЗЫ: 650 долларов США в качестве призов . Никаких тай-брейков: денежные призы делятся поровну, все игроки, получившие равные призовые места, получат бесплатный вход. Вместо бесплатного входа на одно из наших будущих мероприятий можно выбрать трофей или подарочную карту Amazon на 25 долларов. Окончательный список победителей может занять до недели после завершения мероприятия, так как необходимо проверить игры на предмет нарушений честной игры. Эти проверки выполняются с помощью собственных методов, используемых lichess и независимым анализом организаторов турнира.
K-12 Раздел (все учащиеся могут войти)
1-й общий общий $ 80 Amazon Card
2-е место в общем зачете Amazon Card
.0005
Верхний класс 11 11 $ 40 БЕСПЛАТНЫЙ вход (может выбрать Trophy или Amazon Card $ 25)
Top Grade 10 $ 40 БЕСПЛАТНЫЙ Вход (Вместо этого может выбрать Trophy или $ 25 Amazon Card)
Top 9 $ 40 БЕСПЛАТНЫЙ Вход (может выбрать Трофей или 25 долларов США. вместо карты Amazon)
высшего класса 8 40 долларов США бесплатно (вместо этого можно выбрать карту Trophy или 25 долларов США)
высшего класса 7 40 долларов США бесплатно (вместо этого можно выбрать карту Trophy или 25 долларов США)
Верхний класс 6 $ 40 БЕСПЛАТНЫЙ Вход (может выбрать Trophy или Amazon Card $ 25)
Top Crark 5 $ 40 БЕСПЛАТНЫЙ вход (может выбрать Trophy или $ 25 Amazon Card)
Top Crark 4 $ 40 БЕСПЛАТНЫЙ Вход (может выбрать Трофей или 25 долларов США. вместо карты Amazon)
высшего класса 3 40 долларов США бесплатно (вместо этого можно выбрать карту Trophy или 25 долларов США)
высшего класса 2 40 долларов США бесплатно (вместо этого можно выбрать карту Trophy или 25 долларов США)
Верхний класс 1 $ 40 БЕСПЛАТНЫЙ вход (может выбрать Trophy или $ 25 Amazon Card)
Top Grade K/ниже 40 долларов США БЕСПЛАТНЫЙ вход (может выбрать Trophy или $ 25 Amazon Card)
БЕСПЛАТНЫЙ Анализ игры: Все участники. будут приглашены на сеанс анализа через Zoom с титулованными игроками. Сессия начинается в 13:00 по центральному времени.
ПОКА И ПОЗДНЯЯ РЕГИСТРАЦИЯ: Онлайн-регистрация закрывается 13 мая в 915:00 по центральному времени. Напишите [email protected], если вы хотите зарегистрироваться после закрытия регистрации. Игроки могут запросить 1/2 до свидания в первом раунде (игроки, которые присоединятся поздно после 10:00, также получат 1/2 до свидания). Никакие другие 1/2 byes не могут быть запрошены.
ПОЛИТИКА ВОЗВРАТА: Если запрашивается возврат, сумма вступительного взноса за вычетом сборов, которые мы платим за участие и обработку платежей, будет возвращена. Вход на другое мероприятие также может быть выбран без штрафа.
ЧЕСТНАЯ ИГРА: . В турнирной таблице любой игрок, проигравший игроку, нарушившему правила честной игры, получит 1/2 очка. Любые победы или ничьи против нарушителей честной игры остаются в силе, хотя игры не будут оцениваться.
Любой участник может быть приглашен на последующее интервью в Zoom, чтобы подтвердить свою личность и/или умение играть в шахматы.
Регистрируясь для участия в этом турнире, вы соглашаетесь с тем, что имя вашего ребенка и имя пользователя lichess могут быть раскрыты в регистрационных списках игроков и списках призеров.
Играть в шахматы онлайн бесплатно
Знакомство с игрой в шахматы
Chess — настольная стратегическая игра для двух игроков. Здесь вы можете научиться играть в шахматы, играть против робота/компьютера, играть с друзьями на одном устройстве или через Интернет, играть с другими игроками, решать шахматные головоломки с тремя различными уровнями сложности и просматривать ходы многих известных игр в истории шахмат. Здесь вы можете играть в шахматы онлайн без регистрации.
Эта игра в шахматы позволяет вам узнать о шахматных фигурах, о том, как они двигаются, о ценности шахматных фигур, о правилах игры в шахматы, о настройке шахматной доски, о том, как загрузить фен, как загрузить pgn, как анализировать шахматную партию, шахматные головоломки. с уровнями сложности легкий, средний и жесткий. Вы также можете узнать о шахматных терминах. Эта игра в шахматы является частью детских игр.
Цель шахмат
Chess — настольная стратегическая игра для двух игроков. Речь идет о планировании, атаке и защите с противником. Вы должны захватить короля противника, не дав ему захватить своего. Ваша цель — поставить короля противника в такое положение, чтобы он не смог уйти от вашей атаки. Это называется мат.
Игра в шахматы ведется на шахматной доске. Шахматная доска обычно представляет собой поле битвы, где противники сражаются друг с другом до тех пор, пока один из королей не будет захвачен таким образом, что король не сможет избежать атаки противников, которая называется матом. Фигуры представляют собой различные силы, способности двигаться и разные стили атаки и защиты.
Игра в шахматы, вероятно, произошла от индийской игры Чатуранга. Фигуры представляют различные виды вооруженных сил, такие как колесницы, слоны, лошади и пехота.
Установка шахматной доски
Шахматная доска состоит из большого квадрата, разделенного на 64 квадрата одинаковой площади. Квадраты чередуются в комбинации темного и светлого цветов и формируются в виде восьми рядов на восемь столбцов. Они пронумерованы от a1 до h8. Прочитайте настройку шахматной доски для более подробного объяснения.
Название шахматных фигур
Шахматные фигуры
Король — 1 №
Королева — 1 №
Ладья — 2 номера
Рыцарь — 2 номера
Епископ — 2 номера
Пешка — 8 номеров
Читать подробную страницу о шахматных фигурах
Стоимость шахматных фигур
Общепринятые стандартные значения шахматных фигур:
.
Король — бесценный
Королева — 9
Ладья — 5
Бишоп — 3
Рыцарь — 3
Пешка — 1
Как ходят фигуры в шахматах
Движение шахматных фигур определяется набором правил. Каждая часть имеет четкую схему движения. Прочитайте подробную страницу о движении шахматных фигур
Правила игры в шахматы
В шахматах действуют несколько правил. К ним относятся мат, шах, ничья и касание. Читайте подробную страницу о правилах в шахматах
Обозначения в шахматах
В основном доступны две шахматные нотации. Это нотация Форсайта-Эдвардса (FEN) и нотация переносимых игр (PGN). Fen используется для определения статуса шахматной партии, а PGN используется для определения всей игры с самого начала. Подробное объяснение pgn дано здесь. Подробное объяснение FEN дано здесь.
Этапы игры в шахматы
В шахматной игре существует в основном три стадии: начальная игра, миттельшпиль и эндшпиль
Открытие шахматной партии
На этом этапе расставляются фигуры и планируются и выполняются начальные движения для контроля над доской. Существует множество шахматных дебютов.
Середина игры в шахматы
Мидлгейм представляет собой типичное прогрессивное поле боя, включая защиту от атаки, выигрыш и потери. Принимаются разные решения, чтобы защитить территорию, атаковать фигуры противника, спасти свои фигуры и получить преимущество.
Окончание игры в шахматы
Конечная игра — это этап, на котором принимаются важные решения и обычно характеризуется ожесточенной атакой или разменом фигур. В то время как сильный игрок пытается победить, а более слабый игрок пытается сыграть вничью.
Как смотреть шахматы FEN
Нотация Форсайта-Эдвардса
(FEN) используется для определения статуса шахматной игры. FEN характеризуется одной строкой символов ascii. FEN имеет шесть полей, разделенных пробелом. Прочтите подробную инструкцию, как читать шахматы FEN
Как смотреть шахматы PGN
Portable Game Notation (PGN) используется для определения всей игры с самого начала. Portable Game Notation или PGN — это формат, используемый для хранения сведений о шахматной игре в текстовом файле. Этот PGN может быть прочитан людьми так же, как и большинством шахматных движков. Стивен Эдвардс разработал формат PGN в 1933 году. Прочитайте подробные инструкции о том, как читать шахматы PGN
.
Шахматные пазлы
Интерактивные шахматные головоломки делятся на разные категории, такие как легкие, средние и сложные. Легкие шахматные головоломки предназначены для начинающих. Сложные шахматные головоломки для продвинутых игроков. Также доступны коллекции шахматных головоломок, такие как мат в 1, вилочные головоломки. Эти головоломки не только сложны, но и полезны.
Несколько сборников шахматных головоломок, таких как
Легкие шахматные головоломки 1-10, Легкие шахматные головоломки 11-20, Средние шахматные головоломки 1-10 , Средние шахматные головоломки 11-20 , Сложные шахматные головоломки 1-10, Сложные шахматные головоломки 11-20, Шахматная батарея Пазлы 1-10, Шахматы головоломки с вилкой от 1 до 10, Мат в 1, головоломки с 1 по 10, Пожертвовать, головоломки с 1 по 10, Пожертвовать, головоломки с 11 по 20, Избежать мата, головоломки с 1 по 10, Мат в 2, головоломки с 1 по 10, Получить кусок, головоломки с 1 по 10, Получить Головоломки с кусочком 11–20, Головоломки-приманки 1–10, Мат в 3 головоломках 1–10, Мат в 3 головоломках 11–20, Головоломки эндшпиля 1–10, Головоломки эндшпиля 11–20, Головоломки эндшпиля 21–30, Головоломки эндшпиля 31 до 40, Легкие шахматные головоломки с 21 по 30, Средние шахматные головоломки с 21 по 30, Мат в 1, головоломки с 11 по 20, сложные шахматные головоломки с 21 по 30, Продвижение с 1 по 10, Продвижение с 11 по 20, Продвижение с 11 по 20, Эндшпиль с 41 по 50, Головоломки «Жертвоприношение» с 21 по 30, Мат в 2 головоломках с 11 по 20, Стратегические головоломки с 1 по 10, Головоломки с эндшпилем с 51 по 60, Головоломки с матом с 1 по 10, Головоломки с матом с 11 по 20, Головоломки с легкими шахматами с 31 по 40, Средние шахматные головоломки с 31 по 60 40, трудные шахматные головоломки с 31 по 40, головоломки «Жертва» с 31 по 40, головоломки «Получи часть» с 21 по 30, Стратегические головоломки с 11 по 20, Маты с 21 по 30, Мат в 3 головоломках с 21 по 30, Эндшпиль с 61 по 70, Вилка головоломки с 11 по 20, Стратегические головоломки с 21 по 30, головоломки Цугцванг с 1 по 10, головоломки с шампурами с 1 по 10, мат в 4 головоломках с 1 по 10, мат в 2 головоломках с 21 по 30, эндшпильные головоломки с 71 по 80, сложные шахматные головоломки с 41 по 10 50, Легкие шахматные головоломки с 41 по 50, Средние шахматные головоломки с 41 по 50, Жертвоприношение с 41 по 50, Стратегические головоломки с 31 по 40, Стратегические головоломки с 41 по 50, Эндшпильные головоломки с 81 по 90, Мат в 1, головоломки с 21 по 30, Цугцванг, головоломки с 11 по 20, Рекламные головоломки с 21 по 30, Стратегические головоломки с 51 по 60, Матовые головоломки с 31 по 40, Эндшпильные головоломки с 91 по 100, Жертвоприношение, головоломки с 51 по 60, Получение части 31–40, Терминологические головоломки 1–10, Легкие шахматные головоломки 51–60, средние шахматные головоломки 51–60, сложные шахматные головоломки 51–60, Стратегические головоломки 61–70, Вилочные головоломки 21–30, Батарейные головоломки 11–20, Стратегия Головоломки с 71 по 80, Головоломки с 41 по 50, Головоломки с эндшпилем 101–110, Головоломки-приманки с 11 по 20, Стратегические головоломки с 81 по 90, Мат в 2 головоломках от 31 до 40, Загадки с булавками 1 до 10, Загадки с пешками от 1 до 10, Загадки с ладьями от 1 до 10, Загадки с ферзями от 1 до 10, Загадки с конями от 1 до 10, Загадки с сохранением фигур с 1 по 10, Мат в 3 головоломки с 31 по 40, простые шахматные головоломки с 61 по 70, средние шахматные головоломки с 61 по 70, сложные шахматные головоломки с 61 по 70, головоломки с жертвами с 61 по 70, стратегические головоломки с 91 по 100, эндшпильные головоломки с 111 по 120, рекламные головоломки с 31 по 40, Избегайте матовых головоломок с 11 по 20, стратегических головоломок с 101 по 110, матовых головоломок с 41 по 50, цугцванговых головоломок с 21 по 30, слонов с 1 по 10, эндшпильных головоломок с 121 по 130, стратегических головоломок с 111 по 120, жертвоприношений с 71 по 80, мата в 2-х головоломках от 41 до 50, вилочных головоломках 31-40, мате в 1 головоломках 31-40, эндшпильных головоломках 131-140, легких шахматных головоломках 71-80, средних шахматных головоломках 71-80, сложных шахматных головоломках 71-80, стратегических головоломках от 121 до 130, загадки с ферзями с 11 до 20, загадки с ладьей с 11 до 20, загадки со слонами с 11 до 20, загадки с получением части от 51 до 60, загадки с булавками с 11 до 20, загадки с пешками с 11 до 20, загадки с конями с 11 до 20, загадки со стратегиями от 131 до 140, головоломки с жертвоприношением от 81 до 90, Головоломки эндшпиля с 141 по 150, Головоломки с матом с 51 по 60, Мат в 3 головоломках с 41 по 50, Цугцванг головоломки с 31 по 40, Батарейные головоломки с 21 по 30, Стратегические головоломки с 141 по 150, Вилочные головоломки с 41 по 50, Мат в 2 головоломках от 51 до 60, загадки с конем от 21 до 30, загадки с эндшпилем от 151 до 160, простые загадки с 81 до 90, средние загадки с 81 до 90, сложные шахматные загадки с 81 до 90, мат в 4 головоломках с 11 до 20, слоны с 21 по 30 , Стратегические пазлы с 151 по 160, Пазлы с ладьями с 21 по 30, Пазлы с ферзями с 21 по 30, Пазлы с жертвоприношением 9От 1 до 100, Головоломки с эндшпилем 161–170, Головоломки со стратегией 161–170, Головоломки с матом 61–70, Головоломки «Получи кусок» с 61 по 70, Мат в 1, головоломки с 41 по 50, Загадки с пешками с 21 по 30, Головоломки с эндшпилем с 171 по 180, Загадки цугцванга 41–50, Стратегические головоломки 171–180, Легкие шахматные головоломки 91–100, средние шахматные головоломки 91–100, сложные шахматные головоломки 91–100, ладьи 31–40, королевы 31–40, слоны 31–40 , Головоломки «Жертвоприношение» с 101 по 110, Головоломки «Шах и мат» с 71 по 80, Стратегические головоломки с 181 по 190, Загадки эндшпиля 181–190, Загадки коня 31–40, Мат в 2 головоломках 61–70, Мат в 3 головоломках 51–60, Загадки ладьи 41–50, Стратегические головоломки 191–200, Загадки эндшпиля 191–200, Загадки продвижения от 41 до 50, ферзевые головоломки с 41 по 50, мат в 1, головоломки с 51 по 60, простые шахматные головоломки с 101 по 110, средние шахматные головоломки с 101 по 110, сложные шахматные головоломки с 101 по 110, вилочные головоломки с 51 по 60, выигрышные головоломки 71 до 80, Стратегические головоломки с 201 по 210, Головоломки с пешками с 31 по 40, Головоломки с жертвами с 111 по 120, Загадки с эндшпилем с 201 по 210, Загадки с ладьей с 51 по 60, Загадки со слонами с 41 по 50, Загадки с матом с 81 по 90, Головоломки с кеглями с 21 по 30, Головоломки с рыцарями с 41 по 50, Головоломки с цугцвангом с 51 по 60, Стратегические головоломки с 211 по 220, Головоломки с батареей с 31 по 40, Головоломки с эндшпилем с 211 по 220, Мат в двух головоломках с 71 по 80, Головоломки с ладьей с 61 по 61 70, ферзевые головоломки с 51 по 60, простые шахматные головоломки с 111 по 120, стратегические головоломки с 221 по 230, средние шахматные головоломки с 111 по 120, сложные шахматные головоломки с 111 по 120, эндшпильные головоломки с 221 по 230, жертвоприношения с 121 по 130, матовые головоломки 91 до 100, Мат в 3 головоломках от 61 до 70, Ладья головоломки 71 до 80, Эндшпиль головоломки 231 до 240, Стратегические головоломки 231 до 240, Ферзь головоломки 61 до 70, Мат в 1 головоломки 61 до 70, Слоны головоломки 51 до 60, Вилка пазлы с 61 по 70, пазлы Цугцванг с 61 по 70, пазлы с ладьей с 81 по 90, Головоломки эндшпиля 241–250, Головоломки стратегии 241–250, Головоломки «Пожертвовать» 131–140, Головоломки «Получи кусок» 81–90, Легкие шахматные головоломки 121–130, средние шахматные головоломки 121–130, сложные шахматные головоломки 121–130, Мат в 2 головоломках от 81 до 90, мат в головоломках 101 до 110, головоломках батареи 41 до 50, эндшпиле 251 до 260 головоломок, стратегических головоломок 251 до 260, пешек 41 до 50, мат в 3 головоломках 71 до 80, ладей 91 до 100 головоломок , Головоломки со слонами с 61 по 70, Головоломки с королевами с 71 по 80, Головоломки с эндшпилем с 261 по 270, Головоломки с матом в 1 с 71 по 80, Стратегические загадки с 261 по 270, Головоломки с жертвами с 141 по 150, Головоломки с рыцарями с 51 по 60, Загадки цугцванга с 71 по 80 , Пазлы с королевой с 81 по 90, Головоломки на эндшпиль с 271 по 280, Головоломки на эндшпиль с 131 по 140, Средние головоломки с 131 по 140, Сложные головоломки с 131 по 140, Мат в 2 головоломках с 91 по 100, Стратегические головоломки с 271 по 280, Загадки на эндшпиль с 281 по 290, Мат Головоломки с 111 по 120, Головоломки с булавками с 31 по 40, Головоломки со стратегией с 281 по 290, Головоломки с ферзями с 91 по 100, Головоломки с ладьями с 101 по 110, Загадки со слонами с 71 по 80, Головоломки с терминологией с 11 по 20, Головоломки с эндшпилем с 291 по 300, Загадки с жертвоприношением 151 до 160, Батарейные головоломки с 51 по 60, Стратегические головоломки 29Также доступны пазлы от 1 до 300, рыцарские пазлы от 61 до 70.
Вы можете скачать pdf файлы шахматных задач без регистрации. Рабочие листы шахматной головоломки можно распечатать. На нашем сайте ежедневно добавляются новые шахматные головоломки. Не забудьте решить последние шахматные головоломки. Загрузите все рабочие листы шахматных головоломок, такие как
головоломки шахматная батарея 1-10, головоломки мат в 1 1-10, головоломки шахматные вилки 1-10, легкие головоломки шахматы 1-10, легкие головоломки шахматы 11-20, головоломки шахматные жертвы 1-10, головоломки шахматные жертвы 11-20, шахматы избегайте мата, головоломки с 1 по 10, мат в 2, головоломки с 1 по 10, шахматные головоломки с получением фигур с 1 по 10, шахматные головоломки с получением фигур с 11 по 20, средние шахматные головоломки с 1 по 10, средние шахматные головоломки с 11 по 20, шахматные головоломки-приманки 1 до 10, мат в 3 шахматных головоломках с 1 по 10, мат в 3 шахматных головоломках с 11 по 20, сложные шахматные головоломки с 1 по 10, сложные шахматные головоломки с 11 по 20, шахматные эндшпильные головоломки с 1 по 10, шахматные эндшпильные головоломки с 11 по 20, шахматы головоломки на эндшпиль с 21 по 30, головоломки на эндшпиль с 31 по 40, простые шахматные головоломки с 21 по 30, средние шахматные головоломки с 21 по 30, мат в 1, головоломки с 11 по 20, сложные шахматные головоломки с 21 по 30, головоломки с продвижением пешки с 1 по 10, пешка головоломки продвижения с 11 по 20, головоломки с шахматным эндшпилем с 41 по 50, головоломки с жертвой в шахматах с 21 по 30, головоломки с матом в 2 с 11 по 20, головоломки с шахматной стратегией с 1 по 10, головоломки с эндшпилем с 51 по 60, головоломки с матом с 1 по 10, головоломки с матом 11–20, легкие шахматные головоломки 31–40, средние шахматные головоломки 31–40, сложные шахматные головоломки 31–40, шахматные жертвенные головоломки 31–40, шахматные головоломки с выигрышем фигуры 21–30, шахматные стратегии головоломки 11–20, матовые головоломки 21 до 30, мат в 3 головоломках от 21 до 30, шахматные эндшпили головоломки 61 до 70, шахматные вилки головоломки 11 до 20, шахматные стратегические головоломки 21 до 30, шахматные головоломки цугцванг 1 до 10, шахматные шашки головоломки 1 до 10, мат в 4 головоломки от 1 до 10, мат в 2 головоломках с 21 по 30, шахматные эндшпили с 71 по 80, сложные шахматные головоломки с 41 по 50, легкие шахматные головоломки с 41 по 50, средние шахматные головоломки с 41 по 50, шахматные головоломки с жертвами с 41 по 50, шахматные стратегические головоломки от 31 до 40, шахматные стратегии от 41 до 50, шахматные эндшпили от 81 до 90, мат в 1, головоломки с 21 по 30, шахматные головоломки цугцванга с 11 по 20, головоломки с продвижением пешки с 21 по 30, шахматные стратегические головоломки с 51 по 60, головоломки с матом с 31 по 40, шахматные головоломки с эндшпилем с 91 по 100, шахматные головоломки с жертвами с 51 по 60 , шахматные головоломки с выигрышем фигур с 31 по 40, шахматные терминологические головоломки с 1 по 10, легкие шахматные головоломки с 51 по 60, средние шахматные головоломки с 51 по 60, сложные шахматные головоломки с 51 по 60, шахматные стратегии с 61 по 70, шахматные вилки с 21 по 30 , головоломки шахматной батареи 11–20, головоломки шахматной стратегии 71–80, головоломки выигрыша фигур в шахматах 41–50, головоломки шахматного эндшпиля 101–110, головоломки шахматной приманки 11–20, головоломки шахматной стратегии 81–90, мат в 2 головоломках с 31 по 40, головоломки с шахматной булавкой с 1 по 10, головоломки с пешкой с 1 по 10, головоломки с шахматной ладьей с 1 по 10, головоломки с шахматной ферзью с 1 по 10, головоломки с шахматным конем с 1 по 10, головоломки с шахматной фигурой 1 до 10, мат в 3 головоломках от 31 до 40, легкие шахматные головоломки от 61 до 70, средние шахматные головоломки от 61 до 70, сложные шахматные головоломки от 61 до 70, шахматные головоломки с жертвой от 61 до 70, шахматные стратегические головоломки от 91 до 100, шахматные головоломки для эндшпиля 111 до 120, головоломки с продвижением пешки с 31 по 40, шахматные головоломки с целью избежать мата с 11 по 20, шахматные стратегические головоломки с 101 по 110, головоломки с матом с 41 по 50, шахматные головоломки цугцванга с 21 по 30, шахматные головоломки со слонами с 1 по 10, шахматные головоломки с эндшпилем с 121 по 121 130, шахматные стратегические головоломки 111–120, шахматные жертвоприношения 71–80, мат в 2 головоломках 41–50, шахматные вилки 31–40, мат в 1 головоломках 31–40, шахматные эндшпили головоломки 131–140, простые шахматные головоломки 71 до 80, средние шахматные головоломки с 71 по 80, сложные шахматные головоломки с 71 по 80, шахматные стратегические головоломки с 121 по 130, шахматные ферзевые головоломки с 11 по 20, шахматные ладьи с 11 по 20, шахматные головоломки со слоном с 11 по 20, шахматные головоломки с выигрышем фигуры 51 до 60, головоломки с шахматными булавками с 11 по 20, головоломки с пешками с 11 по 20, головоломки с шахматными конями с 11 по 20, головоломки с шахматной стратегией с 131 по 140, головоломки с шахматными жертвами с 81 по 90, шахматные эндшпили с 141 по 150, мат с 51 по 60, мат в 3 с 41 по 50, шахматные цугцванги с 31 по 40, шахматные батарейки с 21 по 30, шахматные стратегии с 141 по 150, шахматные вилки с 41 по 50 , мат в 2 головоломках от 51 до 60, шахматные головоломки коня 21 до 30, шахматные эндшпили головоломки 151 до 160, легкие шахматные головоломки 81 до 90, средние шахматные головоломки 81 до 90, сложные шахматные головоломки 81 до 90, мат в 4 головоломки 11 до 20, шахматные головоломки со слоном с 21 по 30, шахматные стратегические головоломки с 151 по 160, шахматные ладьи с 21 по 30, шахматные головоломки с ферзем с 21 по 30, шахматные головоломки с жертвой 9от 1 до 100, головоломки с шахматным эндшпилем 161–170, головоломки с шахматной стратегией 161–170, головоломки с матом 61–70, головоломки с выигрышем фигур от 61 до 70, головоломки с матом в 1 с 41 по 50, головоломки с пешками с 21 по 30, головоломки с эндшпилем 171–180, шахматные цугцванги 41–50, шахматные стратегии 171–180, легкие шахматы 91–100, средние шахматы 91–100, сложные шахматы 91–100, шахматные ладьи 31–40, шахматные ферзи 31 до 40, шахматные головоломки слона с 31 по 40, шахматные жертвоприношения с 101 по 110, матовые головоломки с 71 по 80, шахматные стратегические головоломки с 181 по 190, шахматные эндшпили с 181 по 190, шахматные кони с 31 по 40, мат в 2 головоломках с 61 по 70, мат в 3 головоломках с 51 по 60, шахматные ладьи с 41 по 50, шахматные стратегические головоломки с 191 по 200, шахматные эндшпили с 191 до 200, головоломки с продвижением пешки с 41 по 50, головоломки с шахматной ферзью с 41 по 50, головоломки с матом в 1 с 51 по 60, простые шахматные головоломки с 101 по 110, средние шахматные головоломки с 101 по 110, сложные шахматные головоломки с 101 по 110, шахматные вилки 51 до 60, шахматные головоломки с выигрышем фигур с 71 по 80, шахматные стратегии с 201 по 210, шахматные пешки с 31 по 40, шахматные жертвы с 111 по 120, шахматные эндшпили с 201 по 210, шахматные ладьи с 51 по 60, шахматные слоны с 41 до 50, головоломки с матом от 81 до 90, шахматные кегли от 21 до 30, шахматные кони от 41 до 50, шахматные цугцванги от 51 до 60, шахматные стратегии от 211 до 220, шахматные батареи от 31 до 40, шахматные эндшпили от 211 до 220, мат в 2 головоломки от 71 до 60 80, шахматные ладьи с 61 по 70, шахматные ферзи с 51 по 60, простые шахматные головоломки с 111 по 120, шахматные стратегические головоломки с 221 по 230, средние шахматные головоломки с 111 по 120, сложные шахматные головоломки с 111 по 120, шахматные эндшпильные головоломки с 221 по 230 , шахматные жертвоприношения с 121 по 130, маты 9от 1 до 100, мат в 3 головоломках с 61 по 70, шахматные ладьи 71 до 80, шахматные эндшпили 231 до 240, шахматные стратегические головоломки 231 до 240, шахматные ферзевые головоломки 61 до 70, мат в 1 головоломки 61 до 70, шахматный слон головоломки с 51 по 60, головоломки с шахматными вилками с 61 по 70, головоломки с цугцвангом с 61 по 70, головоломки с шахматной ладьей с 81 по 90, головоломки с шахматным эндшпилем с 241 по 250, головоломки с шахматной стратегией с 241 по 250, головоломки с жертвой в шахматах с 131 по 140, шахматная фигура головоломки от 81 до 90, простые шахматные головоломки от 121 до 130, средние шахматные головоломки от 121 до 130, сложные шахматные головоломки от 121 до 130, мат в 2 головоломки от 81 до 90, головоломки на мат с 101 по 110, головоломки с шахматной батареей с 41 по 50, головоломки с эндшпилем с 251 по 260, головоломки с шахматной стратегией с 251 по 260, головоломки с шахматными пешками с 41 по 50, головоломки с матом в трех с 71 по 80, головоломки с ладьями с 91 по 100 , шахматные головоломки слона 61–70, шахматные головоломки ферзя 71–80, шахматные головоломки эндшпиля 261–270, мат в 1, головоломки 71–80, шахматные стратегические головоломки 261–270, шахматные головоломки жертвы 141–150, шахматные головоломки коня 51–60 , шахматные пазлы цугцванг с 71 по 80, шахматные пазлы с королевой с 81 по 90, шахматные эндшпили с 271 по 280, легкие шахматы с 131 по 140, средние шахматы с 131 по 140, сложные шахматы с 131 по 140, мат в двух с 91 по 100, шахматные стратегии с 271 по 280, шахматные эндшпили с 281 по 140 290, головоломки с матом 111–120, головоломки с шахматными кеглями с 31 по 40, головоломки с шахматной стратегией с 281 по 290, головоломки с шахматной ферзью с 91 по 100, головоломки с шахматной ладьей с 101 по 110, головоломки с шахматными слонами с 71 по 80, головоломки с шахматной терминологией с 11 по 20, шахматные эндшпили с 291 по 300, шахматные головоломки с жертвами с 151 по 160, шахматные батарейные головоломки с 51 по 60, шахматные стратегические головоломки 291 к 300, головоломки шахматного коня 61 к 70.
Вы также получите помощь, ответы, решения и ключ к каждой шахматной головоломке. Ответ также объясняется правильными шахматными терминами.
Эти лучшие шахматные головоломки сделают вас сильнее как турнирного шахматиста. Выбирайте свою сложность шахматных головоломок и решайте их.
Скачать шахматную таблицу
Шахматный протокол используется для записи ходов во время шахматной партии на шахматном турнире. Доступны официальные шахматные таблицы. Этот шахматный бланк для печати доступен бесплатно в формате pdf для скачивания. Скачайте, распечатайте и используйте их в своих шахматных партиях.
Вы можете бесплатно скачать таблицу результатов шахмат в формате pdf и word. Ссылки для скачивания приведены ниже
Шахматный счет в формате pdf
Бланк результатов шахмат в формате word doc
Бланк результатов шахмат в формате word docx
Шахматный счет в нечетном формате
Шахматные термины
Список шахматных терминов и их определения даны вам в качестве руководства. Вы можете скачать шахматные термины в формате pdf и читать без интернета. Различные названия, такие как шахматные термины и шахматные глоссарии, также означают шахматные термины.
Представляем вам платформу для бесплатной игры в шахматы онлайн с друзьями. Нет необходимости устанавливать какое-либо приложение. Вы можете играть в шахматы бесплатно без регистрации и входа.
Простой. Вы можете заниматься несколькими видами деятельности, связанными с шахматами.
решать шахматные головоломки
узнать о шахматах
играть в шахматы с компьютером
играть в шахматы с другом
создавайте свои собственные партии в шахматы
просмотрщик фена
редактор фена
Фен генератор
просмотрщик пгн
редактор шахматной доски
просмотр известных шахматных партий.
Приложение или программное обеспечение, необходимое для игры в шахматы.
Вам не нужны никакие приложения или программы для игры в шахматы. Вы можете играть в шахматы в самом браузере. Эта игра в шахматы работает на Android, Windows и Linux как на настольных, так и на мобильных устройствах. Вы можете играть в шахматы без какой-либо регистрации, входа или оплаты.
вариантов шахмат
Вариантов шахматной игры
Активные шахматы
Игра Бальбо
Круглые шахматы
Шахматный кросс
Цилиндрические шахматы
Двойные шахматы
Двойные шахматы
Летающие шахматы
Шахматная сетка
Бесконечные шахматы
Лос-Аламосские шахматы
Масонские шахматы
Мини-шахматы
Ромбические шахматы
Сферические шахматы
Случайные шахматы Фишера или Шахматы960
Перемещение шахмат:
Предварительные шахматы
Трансцендентные шахматы
Перевернутые шахматы
Книги для шахмат
Мат! моя первая шахматная книга Гарри Каспарова
100 эндшпилей, которые вы должны знать: важные уроки для каждого шахматиста, Хесус де ла Вилья
Создайте свои шахматы 1: Основы Артура Юсупова
Советская техника миттельшпиля (Шахматная классика) Петра Романовского
Логические шахматы: Ход за ходом: Объяснение каждого хода (Шахматная книга Бэтсфорда) Ирвинга Чернева
Современные шахматные дебюты Ника де Фирмиана
Библия шахматиста Джеймса Ида
Шахматы для детей от Майкла Басмана
Шахматы для чайников Джеймса Ида
Полная книга шахматной стратегии: приемы гроссмейстера от А до Я Джереми Силмана
Шахматы для начинающих: узнай правила, выбери стратегию и начни побеждать Елизавета Орлова
Список шахматных движков
Компьютерная программа, которая вычисляет, анализирует и воспроизводит шахматные ходы, называется шахматным движком. Ниже приведен отсортированный по алфавиту список доступных шахматных движков.
Шахматный тигр
Лукавый
Шахматы с кукушкой
Глубокий Фриц
Фея-Макс
Фриц
Фрукты
Шахматы GNU
ХИАРКС
Гудини
Икарус
Юниор
Рыцарская кепка
Комодо
Лила Шахматы Ноль
MCChess Pro
Наум
Рыбка
Измельчитель
Сьен
СмартТинк
Вяленая рыба
Турошамп
Заппа
Бесплатные базы данных шахматных игр
Ниже приведен список бесплатных баз данных шахматных игр. Вы можете получить доступ к PGN и понять ходы
https://database.chessbase.com/
https://database.lichess.org/
https://www.chessgames.com
chesstempo.com
https://www. ficsgames.org/
https://www.pgnmentor.com
http://caissabase.co.uk/
www.chessbites.com
theweekinchess.com
http://www.ichessbase.com
http://www.chesszone.org
Навыки, развиваемые игрой в шахматы
Шахматы развивают навыки, перечисленные ниже.
Навык решения проблем
Навык рассуждения
Умение справляться с давлением
Навык терпения
Навык распознавания образов
Навык стратегического мышления
Навык расчета
Навык анализа
Навык памяти
Навык планирования
Умение концентрироваться
Соревновательный навык
Навык выживания
Как играть в шахматы
скоро будет обновлено
Короткий адрес этой игры
Доступ к этой онлайн-игре в шахматы можно получить напрямую, используя короткую ссылку gbud. in/chs
.
[pdf] Скачать Играть в шахматы онлайн бесплатно в формате pdf и читать офлайн
Скачать Play Chess онлайн бесплатно в формате pdf и читать без интернета.
Содержание
Введение в игру Шахматы
Цель шахмата
Настройка шахматной платы
Наименование шахматных пьес
Значение шахматных фигур
Как пьесы перемещаются в шахматах
Правила
Отстава. игра в шахматы
Средняя партия в шахматах
Конечная партия в шахматах
Как смотреть шахматы FEN
Как смотреть шахматы PGN
Шахматные головоломки
Скачать 9 шахматный протокол0190
Шахматные термины
Действия, связанные с игрой в шахматы
Приложение или программное обеспечение, необходимое для игры в шахматы.
5.1. Свойства углерода и его соединений . Сборник основных формул по химии для ВУЗов
Характерные степени окисления углерода, электронные формулы соответствующих ионов, химические свойства и примеры соединений приведены в таблице.
Свойства углерода
2С + O2(недостаток) ?t? 2CO
С + O2(избыток) ?t? CO2
С + CO2 ?t? 2CO
С + CuO ?t? Cu + CO
4С + Fe3O4 ?t? 3Fe + 4CO
ЗС + СаО ?t? СаС2 + CO
2С + Са ?t? СаС2
ЗС + 4Al ?t? Al4С3
С + 4НNO3(конц.) ?t? CO2 + 4NO2 + 2Н2O
Свойства оксида углерода (II) – угарного газа
2CO + O2 ?t? 2CO2
ЗCO + Fe2O3 ?t? 2Fe + ЗCO2
CO + CuO ?t? Cu + CO2
CO + H2O ?t, катализатор? CO2 + Н2
CO + NaOH ?t, p? HCOONa
Свойства оксида углерода(IV) – углекислого газа
CaCO3 + 2HCl = CaCl2 + Н2O + CO2?
CaCO3 ?t? СаО + CO2
CO2 + Н2O ? Н2CO3 ? H+ + HCO3? ? 2Н+ + CO32-
CO2 + Са(OH)2 = CaCO3? + Н2O
CO2 + Н2O + CaCO3? = Са(HCO3)2
CO2 + 2Mg ?t? С + 2MgO
Свойства карбонатов и гидрокарбонатов
NaOH + CO2 = NaHCO3
2NaOH + CO2 = Na2CO3 + H2O
Са(HCO3)2 ?100 °C? CaCO3? + Н2O + CO2?
CaCO3 ?1000 °C? СаО + CO2
2NaHCO3 ?t? Na2CO3+ Н2O + CO2?
NaHCO3+ CH3COOH = CH3COONa + Н2O + CO2?
CaCO3 + Н2O + CO2 = Са(HCO3)2
Са(HCO3)2 + Са(OH)2 = CaCO3? + 2Н2O
Na2CO3 + H2O ? NaHCO3 + NaOH
NaHCO3 + (Н2O) ? NaOH + (Н2O) + CO2
Свойства карбидов
СаС2 + 2Н2O = Са(OH)2 + С2Н2
Al4С3 + 12HCl = 4AlCl3 + ЗCH4
Кислородные соединения углерода
Монооксид углерода
СО — оксид углерода (II), угарный газ. В молекуле СО существует тройная связь. Две из трех связей образованы по обменному механизму, а одна — по донорно-акцепторному.
Это самая прочная из всех двухатомных молекул (энергия связи 1069 кДж/моль), поэтому СО является химически малоактивным веществом.
Наличие неподеленных электронных пар у атомов углерода и кислорода обусловливает возможность образования прочных комплексных соединений с d-элементами
Физические свойства
При обычной температуре СО — бесцветный газ, без запаха, очень плохо растворяется в воде, лучше — в спирте.
Монооксид углерода — ядовитый газ, разрушает комплекс гемоглобина с кислородом.
Способы получения
1. Промышленные:
С + H2O → CO + Н2
СН4 + Н2О → СО + ЗН2
СН4 + СО2 → 2СО + 2Н2 В качестве катализаторов используют Ni, MgO, Al2О3.
2СН4 + 3О2 → 2СО + 4Н2О
2С + О2 = 2СО (горение угля в недостатке О2)
2. Лабораторные:
HCOOH → CО + Н2О
Н2С2O4 → CО + CО2+ Н2О
Химические свойства
При обычных условиях не реагирует с водой, кислотами, щелочами, поэтому относится к типу несо леобразующих оксидов. Однако формально его можно рассматривать как ангидрид муравьиной кислоты. Основанием для этого является его образование при дегидратации НСООН (см. выше), а также получение формиата натрия при пропускании СО через концентрированный раствор NaOH под высоким давлением:
СО + NaOH → HCOONa формиат натрия
1. Взаимодействие с кислородом и галогенами:
2СО + О2 = 2СО2
СО + Cl2 = COCl2 фосген
2. Восстановление металлов из их оксидов (реакции осуществляются при Т — 300—1500°С):
2СО + SnО2 → Sn + 2СО2
4СО + Fe3O4 → 3Fe + 4CО2
3. Восстановление водорода из воды:
СО + Н2О = Н2 + CО2
Эта реакция в присутствии катализаторов, содержащих Pt или Pd, происходит при обычной температуре, что используется для удаления СО из выхлопных газов автомобилей.
4. Восстановление некоторых благородных металлов из солей (при комнатной Т):
СО + PdCl2 + Н2О = Pd↓ + СО2↑ + 2HCl
1. Синтез метанола СО + 2Н2 → СН3ОН
2. Синтез метана и его гомологов: СО + 3Н2 → CН4 + Н2О
nCO + (2n + 1)H2 → СnН2n + nН2O
Молекулы СО довольно легко присоединяются к атомам некоторых d-металлов. В образовании донорно-акцепторных связей участвуют неподеленные электронные пары атомов углерода в молекулах СО и свободные орбитали атомов металлов:
4СО + Ni = [Ni(CO)4] тетракарбонил никеля
5СО + Fe = [Fe(CO)5] пентакарбонил железа
СО связывается с ионами Fe2+ в гемоглобине (НЬ) подобно О2. Сродство НЬ человека к СО более чем в 200 раз превышает сродство к О2, поэтому СО способен вытеснять О2 из оксигемоглобина НЬО2:
НЬО2 + СО → НbСО + О2
Этим и объясняется высокая токсичность угарного газа.
Диоксид углерода
СО2 — оксид углерода (IV), углекислый газ, угольный ангидрид, диоксид углерода. В молекуле СО2 атом углерода связан полярными ковалентными связями с двумя атомами кислорода: O=С=O. Молекула имеет симметричное линейное строение, вследствие чего в целом неполярна (дипольный момент равен O).
Физические свойства
При обычных условиях СО2 — бесцветный негорючий газ, значительно тяжелее воздуха, со слабым кисловатым запахом и вкусом Уже при комнатной температуре под давлением сжижается, а при более низкой температуре превращается в твердую снегообразную массу («сухой лед»). О растворении в воде — см. ниже.
Способы получения
1. Разложение карбонатов и гидрокарбонатов:
СаСО3 → СаО + CО2↑
2NaHCО3 = Na2CО3 + CО2↑ + Н2O
2. Сжигание угля и других видов топлива:
СxНy + О2 → СО2 + Н2O
3. Действие сильных кислот на карбонаты и гидрокарбонаты:
MgCО3 + 2HCl = MgCl2 + Н2O + CО2↑
4. Спиртовое брожение глюкозы:
С6Н12O6 → 2СО2↑ + 2С2Н5ОН
Химические свойства
Химически диоксид углерода — довольно инертное вещество. Основной тип взаимодействия СО2 связан с проявлением свойств кислотного оксида.
1. Взаимодействие с водой.
При растворении углекислого газа в воде небольшая часть его молекул (менее 1 %) соединяется с молекулами Н20, образуя очень слабую угольную кислоту:
СО2 + Н2O = Н2СО3
2. Взаимодействие со щелочами и основными оксидами.
СО2 + 2NaOH = Na2CО3 карбонат натрия
СО2 + NaOH = NaHCО3 гидрокарбонат натрия
СО2 + Са(ОН)2 = СаСО3↓ + Н2O
Эта реакция используется как качественная для обнаружения
СО2↑.
3. Взаимодействие с водными растворами солей, образованных очень слабыми кислотами (слабее угольной):
Na2SiО3 + СО2 + Н2O = H2SiО3↓ + Na2CО3
С6Н5ОК + СО2 + Н2O = С6Н5ОН + КНСО3
СО2 — биохимически активное вещество. В листьях растений на свету из СО2 и Н2O образуются углеводы и кислород:
nСО2 + mН2O → Сn(Н2O)m + nО2
При высокой температуре диоксид углерода реагирует с очень активными металлами, а также с другими сильными восстановителями (С, Н2, NH3). Примеры реакций:
СО2 + 2Мg = 2МgО + С
СО2 + С = 2СО
СО2 + ЗН2 → СН3ОН + Н2O
а) Синтез мочевины (карбамида):
СО2 + 2NH3 → CO(NH2)2 + Н2O
б) Получение питьевой соды по методу Сольвэ:
NaCl + NH3 + СО2 + Н2O = NaHCO3 + NH4Cl
Угольная кислота и карбонаты
Растворимость угольного ангидрида в воде при обычных условиях сравнительно невелика (в 1 л воды — 1 л СО2), при этом только очень небольшая его часть (менее 1 %) соединяется с водой, образуя непрочную угольную кислоту:
СО2 + Н2O → Н2СО3
Будучи 2-основной кислотой, Н2СО3 диссоциирует ступенчато с образованием гидрокарбонат- и карбонат-анионов:
Н2СО3 → Н+ + НСО3—
НСО3— → Н+ + СО32-
Угольная кислота существует только в водных растворах, где количество ее молекул и анионов в сотни раз меньше, чем количество растворенных молекул СО2.
Н2СО3 как индивидуальное вещество не имеет никакого значения, но ее соли очень устойчивы и весьма распространены.
Карбонаты
Растворимыми в воде солями являются карбонаты щелочных металлов и аммония. Вследствие высокой степени гидролиза их водные растворы имеют сильнощелочную реакцию и в целом ряде случаев ведут себя как основания средней силы.
Na2СО3 + Н2O = NaOH + NaHСО3
СО32- + Н2O = ОН— + НСО3—
Химические свойства
Карбонаты щелочных Me при нагревании до т. пл. (~ 800 — 1000°С) не разлагаются. Все остальные карбонаты разлагаются, не достигнув т. пл., образуя углекислый газ и соответствующий оксид МеО. Термическое разложение СаСО3 широко используется для получения негашеной извести и СО2:
СаСО3 = СаО + СО2↑
При температуре от 700 до 900″С эта реакция обратима, ее равновесие смещают путем изменения давления СО2. Особенно легко разлагается карбонат аммония:
(NH4)2CО3 = 2NH3↑ + СО2↑ + Н2O
Почти все кислоты, даже такие слабые, как уксусная, легко разлагают карбонаты, вытесняя из них угольную кислоту в виде СО2 и Н2O:
Na2CО3 + 2HCl = 2NaCl + Н2O + CО2↑
СаСО3 + 2HNO3 = Са(NO3)2 + Н2O + CО2↑
(NH4)2CО3 + 2СН3СООН = 2CH3COONH4 + CО2 + Н2O
При пропускании СО2 в растворы карбонатов или при постепенном добавлении к ним кислот происходит образование кислых солей — гидрокарбонатов:
Na2C3 + СО2 + Н2O = 2NaHC3
Na2C3 + HCI = NaHCO3 + NaCl
В природе происходит медленное растворение известняков под действием атмосферных осадков и СО2:
СаСО3 + Н2O + СО2 = Са(НСO3)2
Катионы NH4+, щелочных и щелочноземельных Me, а также некоторые другие 2-зарядные катионы образуют с анионами НСО3— соли — гидрокарбонаты. Все они легко растворяются в воде, за исключением NaHCО3.
При кипячении растворов гидрокарбонатов происходит их превращение в карбонаты или гидроксиды металлов с отщеплением СО2:
Са(НСО3)2 = СаСО3↓ + Н2O + СО2↑
Mg(HCО3)2 = Мg(ОН)2↓ + Н2O + 2СО2↑
Водные растворы гидрокарбонатов также имеют щелочную среду вследствие гидролиза, но рН значительно меньше, чем у растворов карбонатов. Гидролиз аниона НСО3— протекает по схеме:
НСО3— + Н2O → ОН— + Н2СО3
Сода — один из главных продуктов неорганического синтеза. В промышленности ее получают ам миачно-хлоридным способом, основанном на малой растворимости NaHCО3 в воде (метод Сольвэ):
NH3 + CО2 + Н2O = NH4HCО3
NH4HCО3 + NaCl = NaHCО3 + NH4Cl
NH3 + CО2 + Н2O + NaCI = NaHCО3 + NH4Cl
При прокаливании NaHCО3 разлагается с образованием Na2CО3, СО2 и воды.
Качественная реакция на карбонат — анионы
1. Распознавание карбонатов в виде твердых веществ производится с помощью HCl или H2SО4 (разбавленных растворов) Выделяющийся при их взаимодействии СО2 определяют по помутнению известковой воды:
СО32- + 2Н+ = СО2↑ + Н2O
СО2 + Са(ОН)2 = СаСО3↓ + Н2O
При избытке СО2 помутнение исчезает и раствор вновь становится прозрачным:
СаСО3 + Н2O + СО2 = Са(НСО3)2
2. Распознавание карбонат-анионов в растворе можно осуществить введением катионов Са2+ , что приводит к выпадению в осадок нерастворимого СаСО3.
Исторические и технические названия некоторых карбонатов


 е.)световая минутасветовая секундасветовая микросекундасветовая наносекундасветовая пикосекундапланковская длина (L)Всё
е.)световая минутасветовая секундасветовая микросекундасветовая наносекундасветовая пикосекундапланковская длина (L)Всё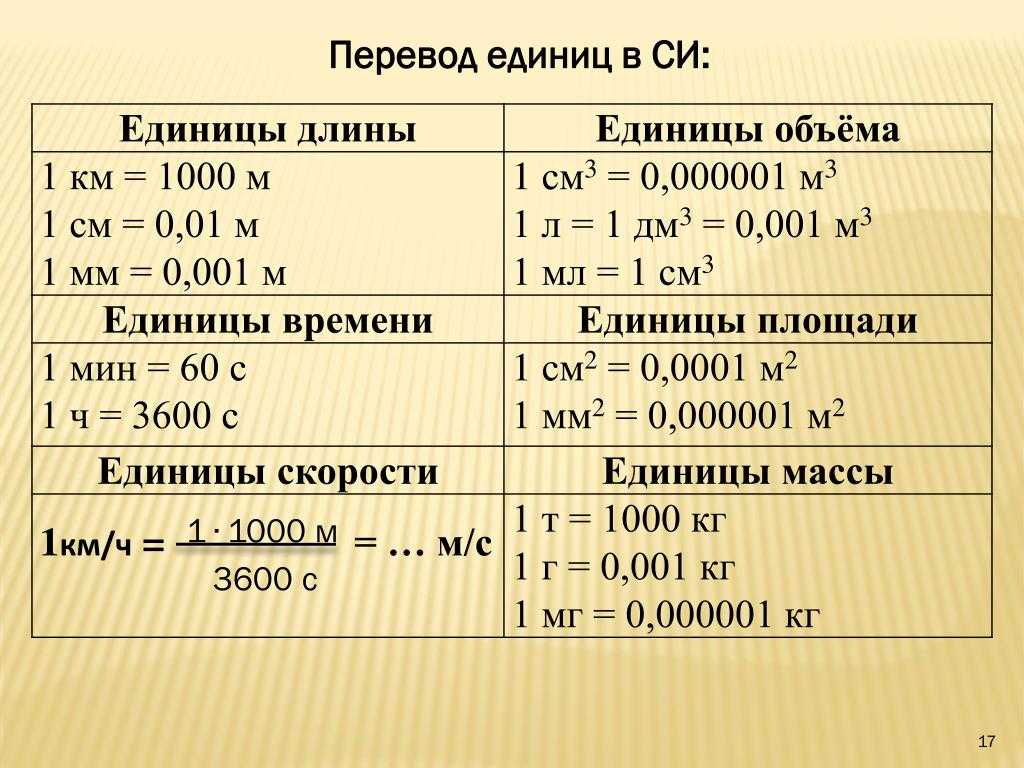 е.)световая минутасветовая секундасветовая микросекундасветовая наносекундасветовая пикосекундапланковская длина (L)Всё
е.)световая минутасветовая секундасветовая микросекундасветовая наносекундасветовая пикосекундапланковская длина (L)Всё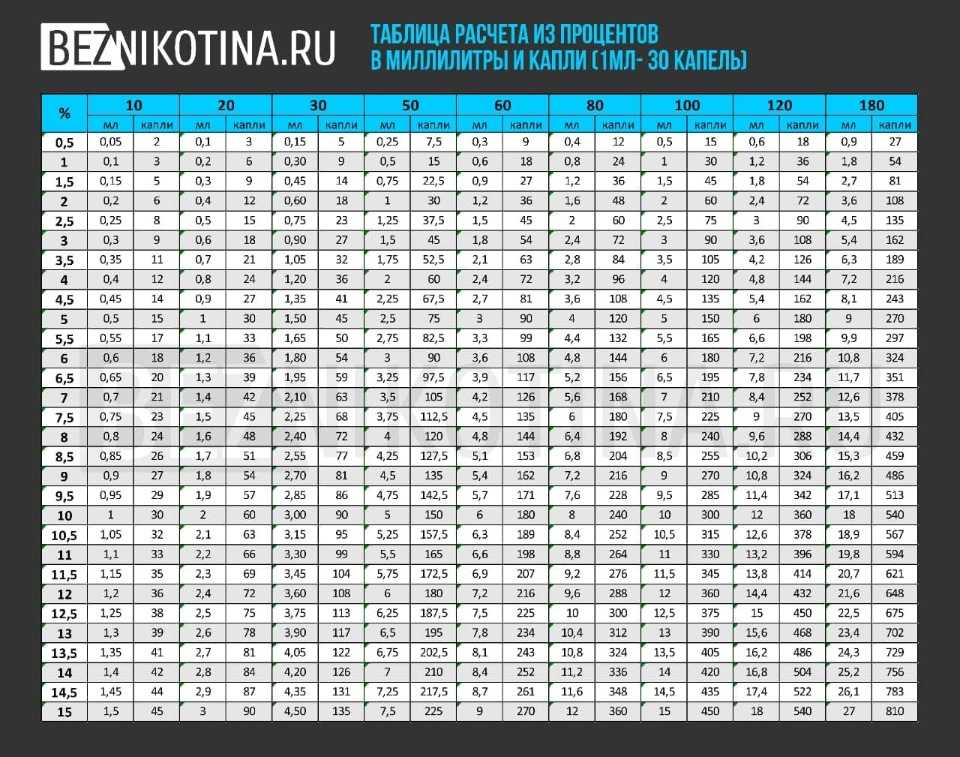 Эти значения относятся к длине чего-либо, точно так же, как миллиметр.
Эти значения относятся к длине чего-либо, точно так же, как миллиметр.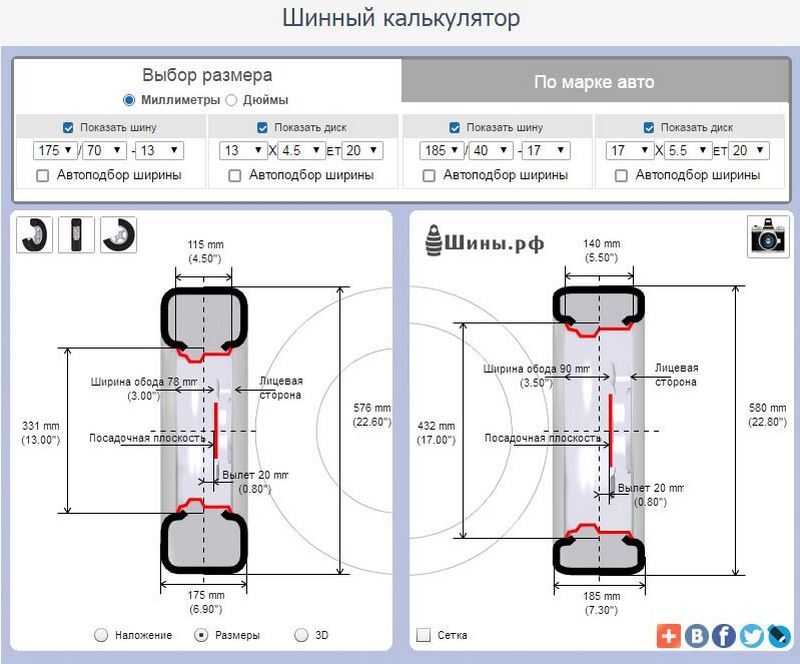 Вы можете сделать то же самое, если хотите преобразовать в см, м или км.
Вы можете сделать то же самое, если хотите преобразовать в см, м или км.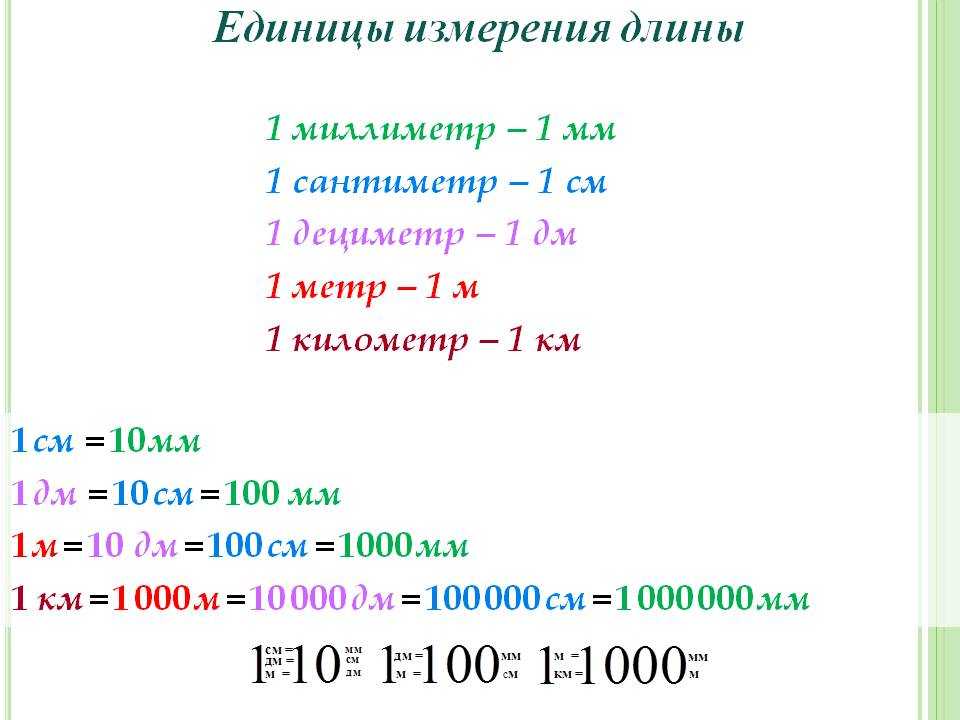 Таким образом, мы называем выразить его в миллиметрах. Тысячная метра равна 1 мм.
Таким образом, мы называем выразить его в миллиметрах. Тысячная метра равна 1 мм.  Наиболее заметным исключением являются Соединенные Штаты, где имперская система все еще используется для большинства целей.
Наиболее заметным исключением являются Соединенные Штаты, где имперская система все еще используется для большинства целей. Наиболее заметным исключением являются Соединенные Штаты, где имперская система все еще используется для большинства целей.
Наиболее заметным исключением являются Соединенные Штаты, где имперская система все еще используется для большинства целей.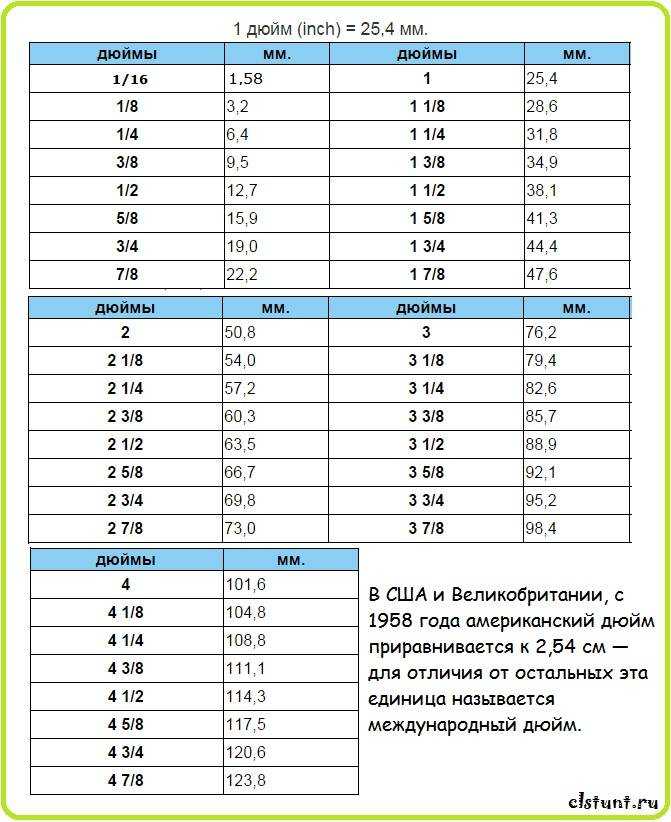 Это измерение было использовано для создания международного прототипа счетчика — металлического стержня, хранящегося в штаб-квартире BIPM. Со временем от этого стандарта отказались в пользу более точных измерений – впервые в 19 в.60 11-я конференция мер и весов определила метр как «1,650763,73 длины волны оранжево-красной эмиссионной линии атома криптона-86 (в вакууме)». Наконец, в 1983 году 17-я конференция определила метр как «расстояние, пройденное светом в вакууме за 1/299792458 секунды», что, следовательно, приводит к определению миллиметра как расстояния, пройденного светом в вакууме за 1/299792458000 секунды. Второй.
Это измерение было использовано для создания международного прототипа счетчика — металлического стержня, хранящегося в штаб-квартире BIPM. Со временем от этого стандарта отказались в пользу более точных измерений – впервые в 19 в.60 11-я конференция мер и весов определила метр как «1,650763,73 длины волны оранжево-красной эмиссионной линии атома криптона-86 (в вакууме)». Наконец, в 1983 году 17-я конференция определила метр как «расстояние, пройденное светом в вакууме за 1/299792458 секунды», что, следовательно, приводит к определению миллиметра как расстояния, пройденного светом в вакууме за 1/299792458000 секунды. Второй.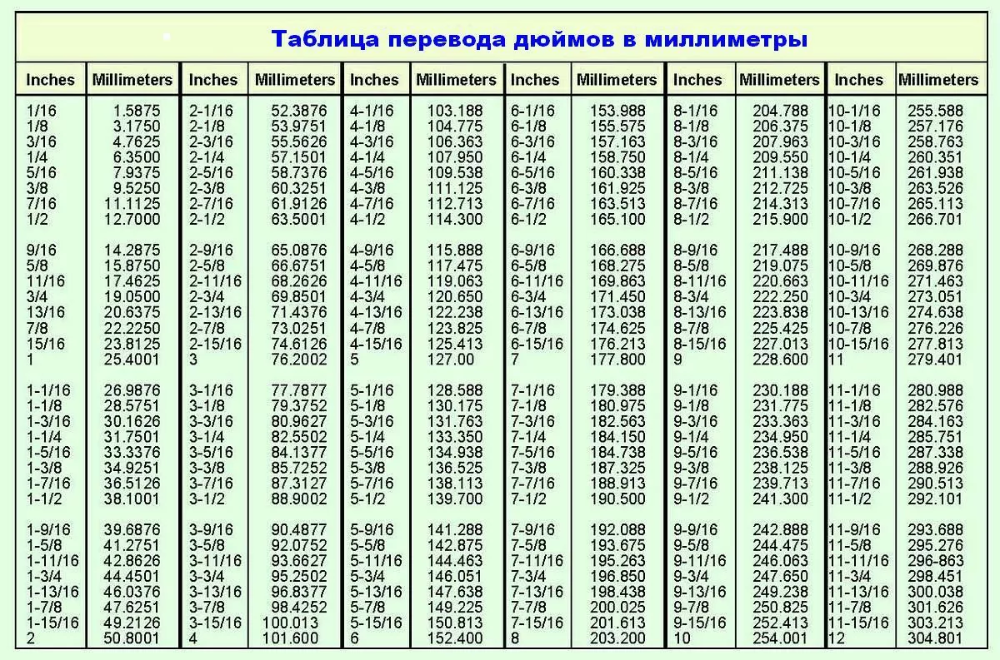 д.)
д.)
 Молодые штамбовые деревья с диаметром ствола менее 6 см могут иметь только одну характеристику – высоту, у более взрослых саженцев указываются оба параметра.
Молодые штамбовые деревья с диаметром ствола менее 6 см могут иметь только одну характеристику – высоту, у более взрослых саженцев указываются оба параметра.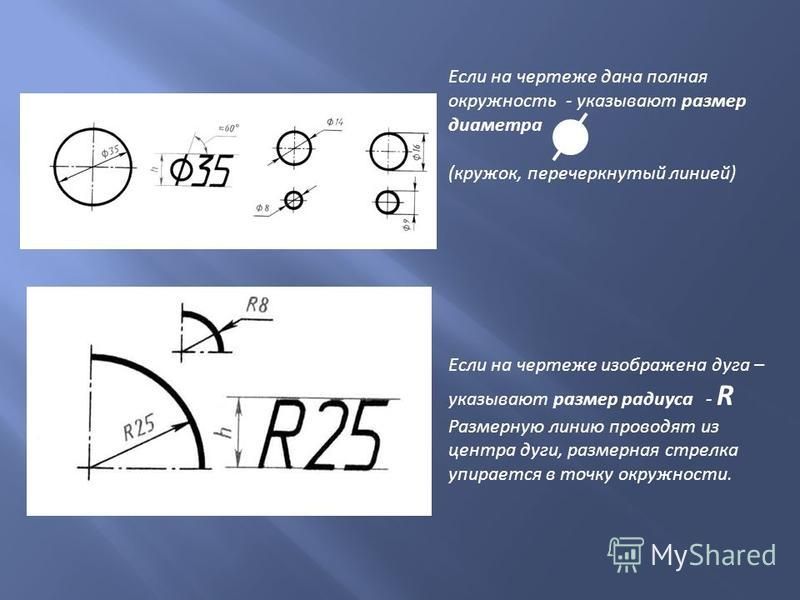 Китайский язык в качестве родного используют около 1,4 миллиарда человек. При такой распространенности языка, желающих его выучить становится больше с каждым годом. Откуда возникает живой интерес к китайскому среди студентов и когда стоит начинать общаться с носителем языка поделились эксперты Южного федерального университета.
Китайский язык в качестве родного используют около 1,4 миллиарда человек. При такой распространенности языка, желающих его выучить становится больше с каждым годом. Откуда возникает живой интерес к китайскому среди студентов и когда стоит начинать общаться с носителем языка поделились эксперты Южного федерального университета.  Проще говоря, в русском языке слово состоит из букв русского алфавита, а в китайском такое же слово может обозначать один или несколько иероглифов, каждый из которых имеет свое значение, но вместе они могут обозначать что-то определенное. Для понимания сути иероглифов достаточно посмотреть на экран своего смартфона, где каждое приложение обозначается своей иконкой и даже без текста под ней человек понимает, что эта иконка обозначает. Более того, при знании достаточного количества иероглифов, человек может понять значение даже незнакомого ему слова, просто сопоставив значения иероглифов, из которых оно состоит. Все это невероятно упрощает скорость восприятия текста, записанного иероглифами».
Проще говоря, в русском языке слово состоит из букв русского алфавита, а в китайском такое же слово может обозначать один или несколько иероглифов, каждый из которых имеет свое значение, но вместе они могут обозначать что-то определенное. Для понимания сути иероглифов достаточно посмотреть на экран своего смартфона, где каждое приложение обозначается своей иконкой и даже без текста под ней человек понимает, что эта иконка обозначает. Более того, при знании достаточного количества иероглифов, человек может понять значение даже незнакомого ему слова, просто сопоставив значения иероглифов, из которых оно состоит. Все это невероятно упрощает скорость восприятия текста, записанного иероглифами». 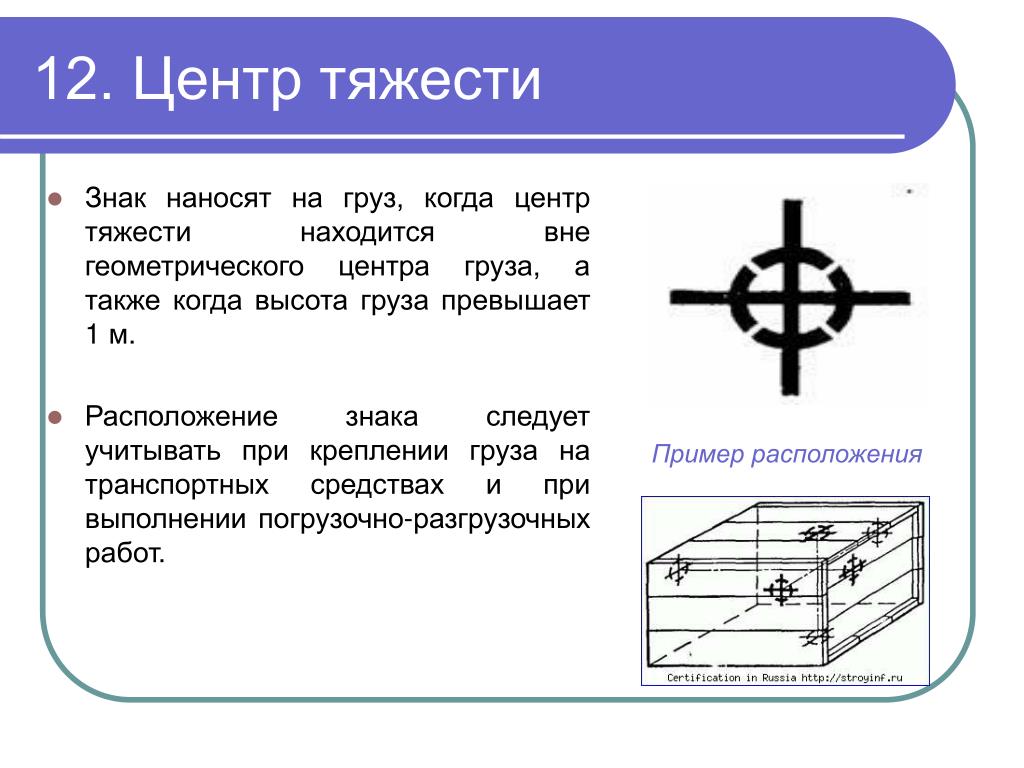 И если еще несколько лет назад таким спросом пользовался английский язык, то сейчас его в негласной гонке догоняет китайский.
И если еще несколько лет назад таким спросом пользовался английский язык, то сейчас его в негласной гонке догоняет китайский. 

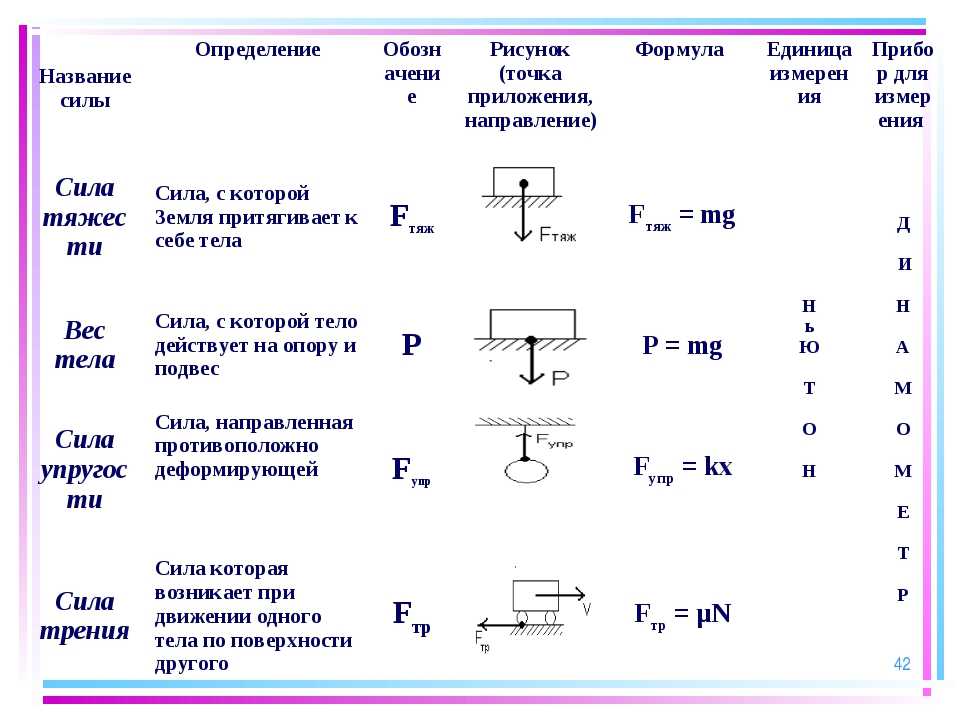 Помимо взрослых людей, в языковой школе обучается и значительное количество детей».
Помимо взрослых людей, в языковой школе обучается и значительное количество детей». 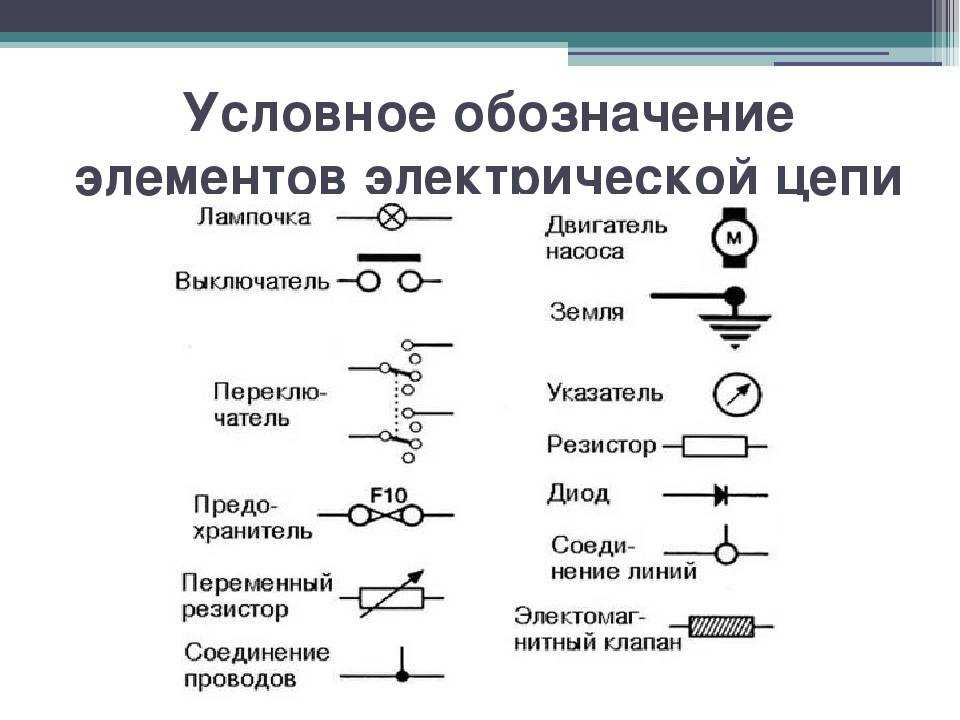
 показано с обозначением осевой линии пунктирной желтой линией Стрелки показывают, что направление движения — одна полоса в каждом направлении.
показано с обозначением осевой линии пунктирной желтой линией Стрелки показывают, что направление движения — одна полоса в каждом направлении.
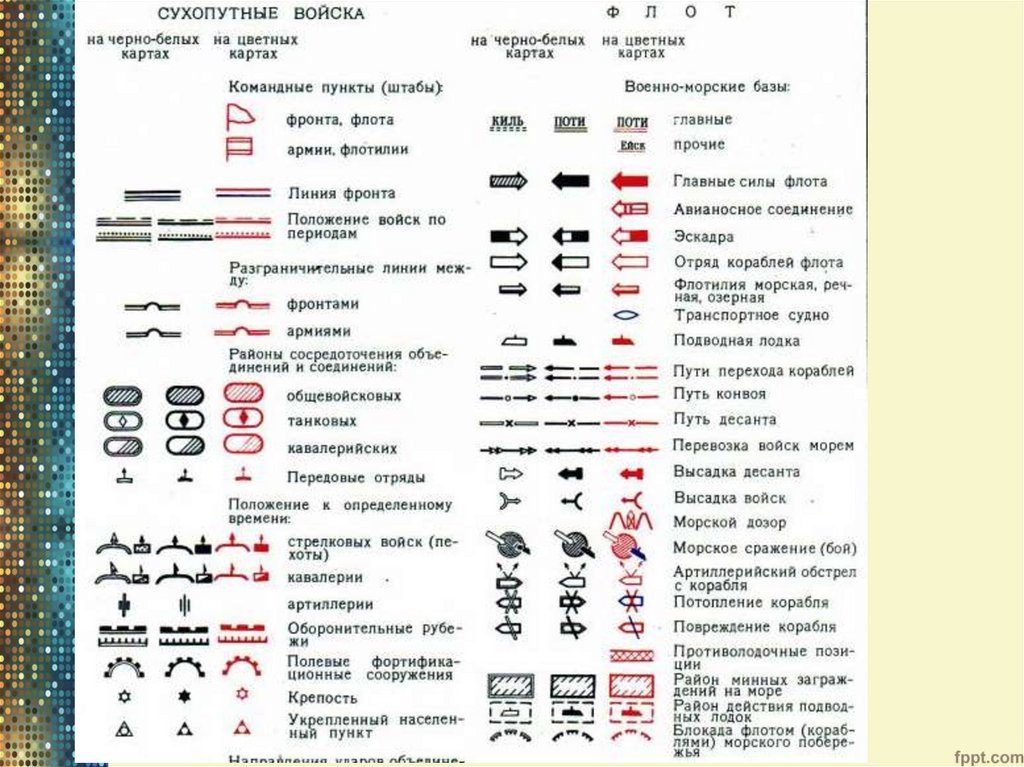 Ломаная белая линия разделяет полосы движения в одном направлении.
Ломаная белая линия разделяет полосы движения в одном направлении.
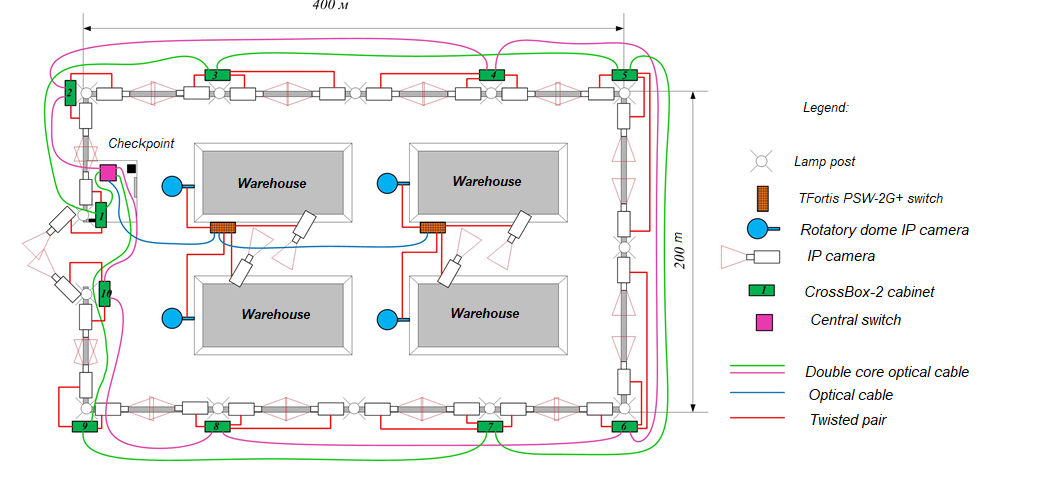 К югу от перекрестка сплошная двойная желтая линия разделяет центр и самую внутреннюю полосу движения на юг, а сплошная одиночная белая линия разделяет центр и самую внутреннюю полосу движения на север.
К югу от перекрестка сплошная двойная желтая линия разделяет центр и самую внутреннюю полосу движения на юг, а сплошная одиночная белая линия разделяет центр и самую внутреннюю полосу движения на север.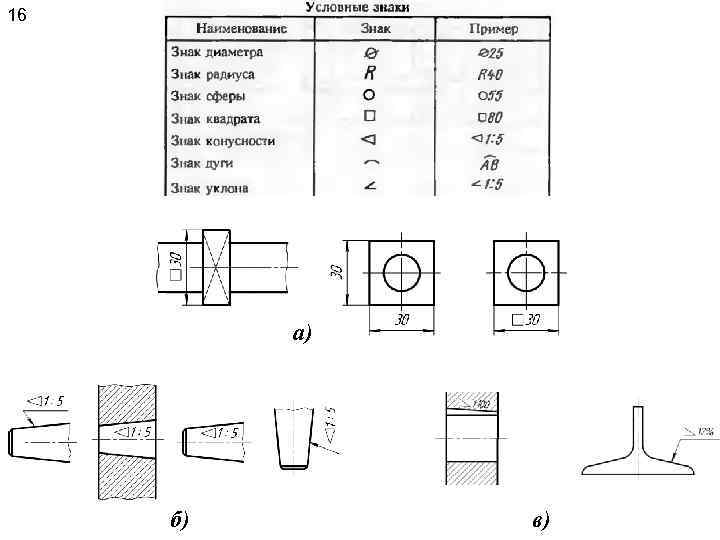
 Сплошная желтая линия показана рядом с полосой движения в северном направлении на этом конусе. На конусе показана буферная зона в конце полосы движения на юг и на север.
Сплошная желтая линия показана рядом с полосой движения в северном направлении на этом конусе. На конусе показана буферная зона в конце полосы движения на юг и на север.
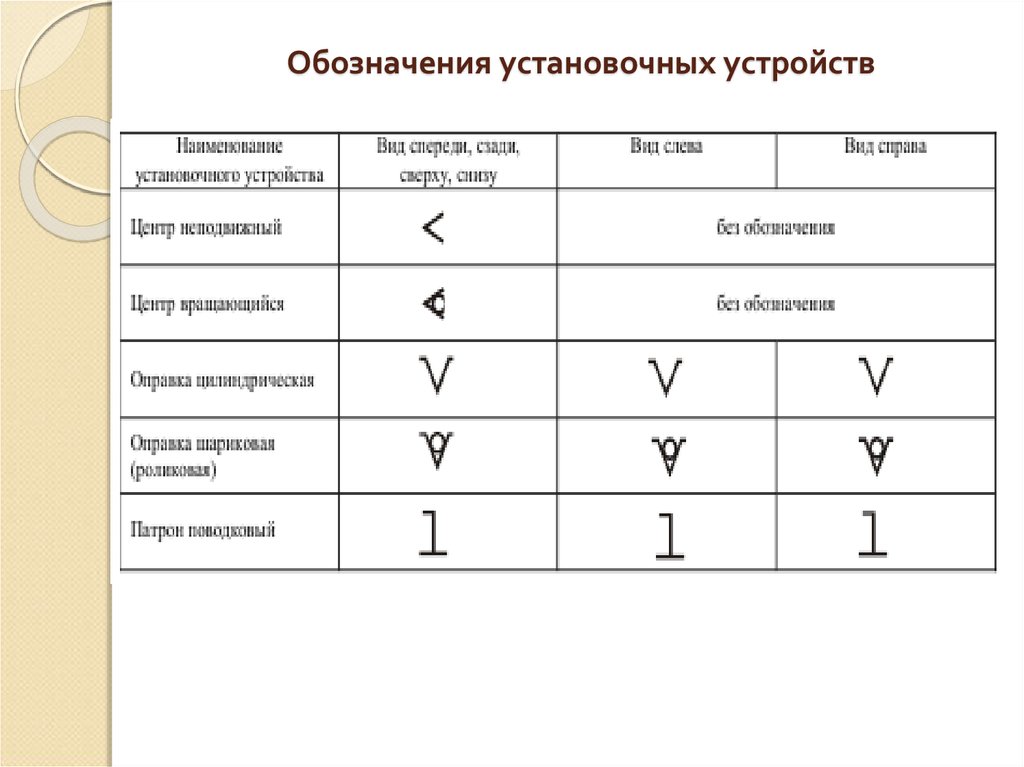
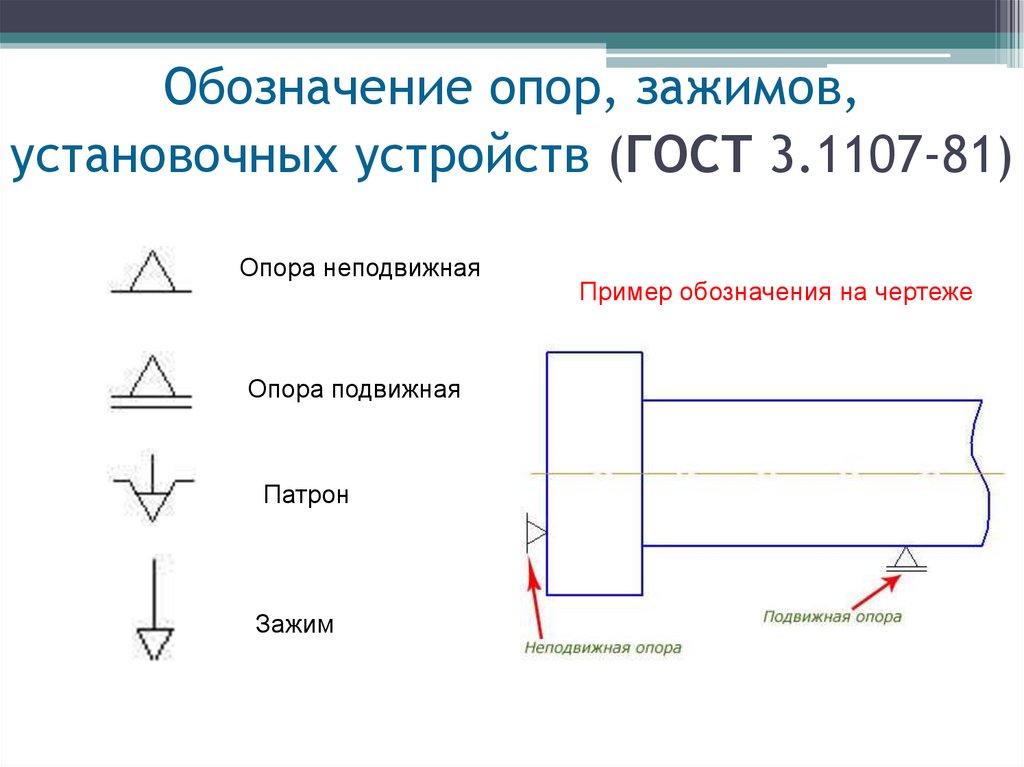
 Сочетание двух сил заставит ветер дуть параллельно прямым изобарам с высоким давлением справа.
Сочетание двух сил заставит ветер дуть параллельно прямым изобарам с высоким давлением справа.
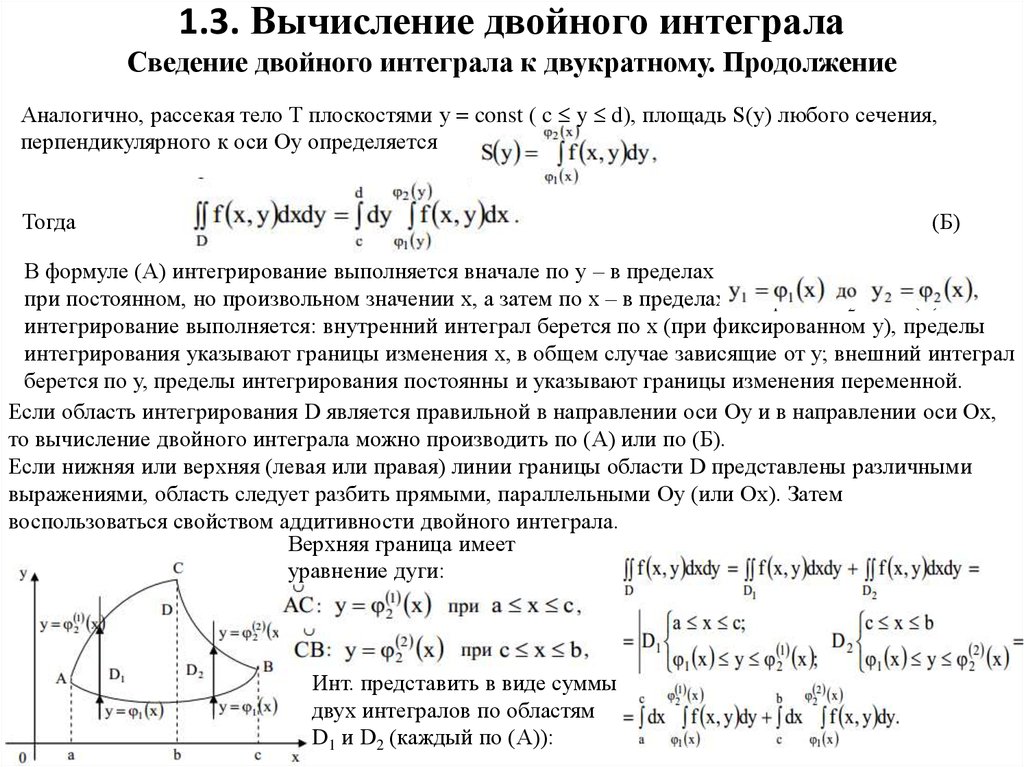 14159..
14159..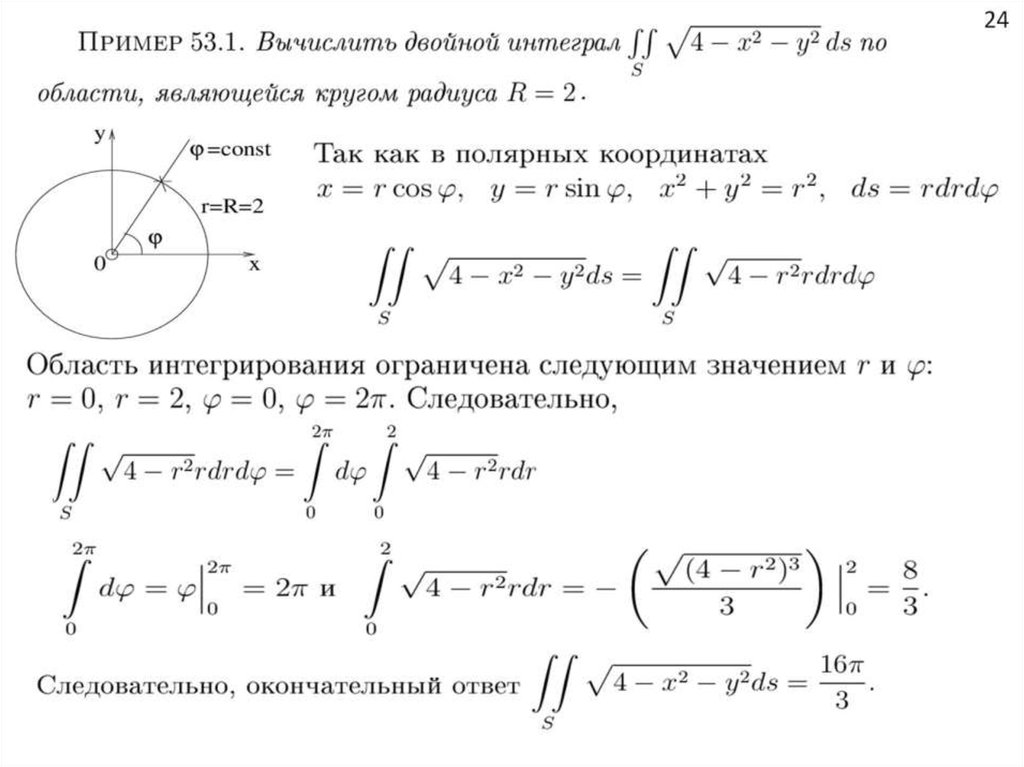
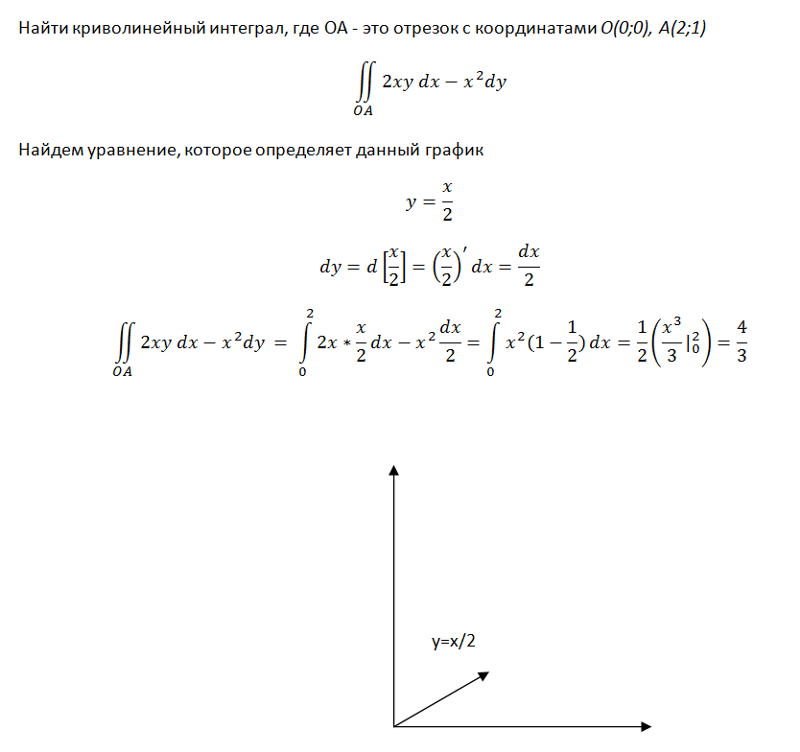
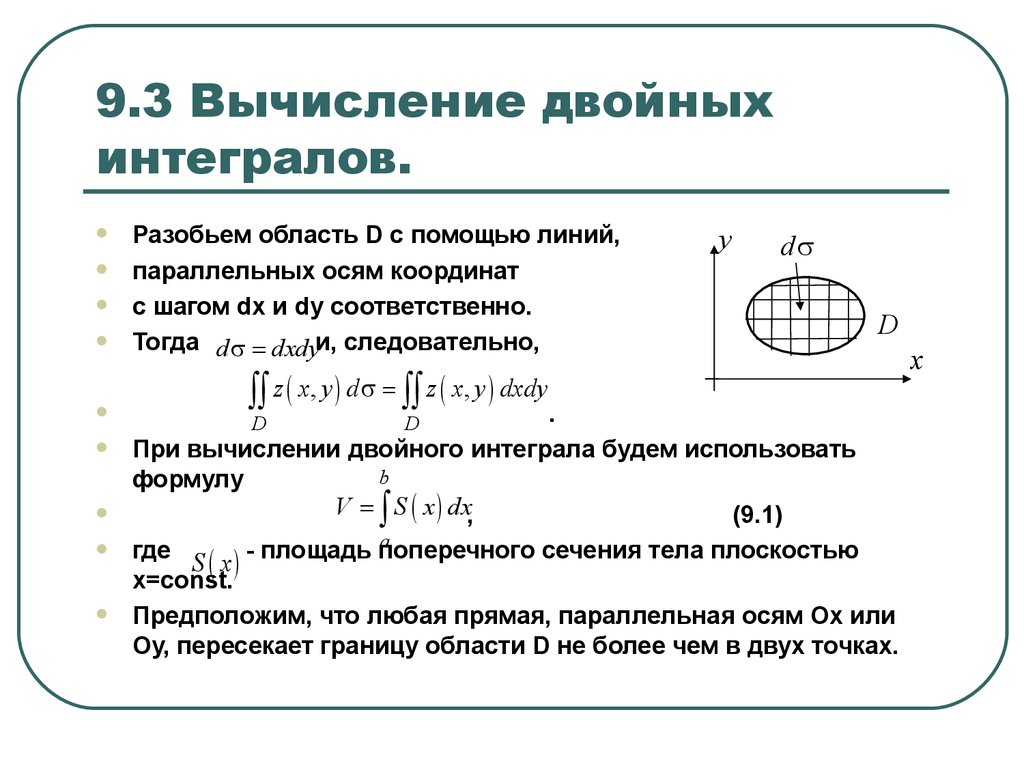
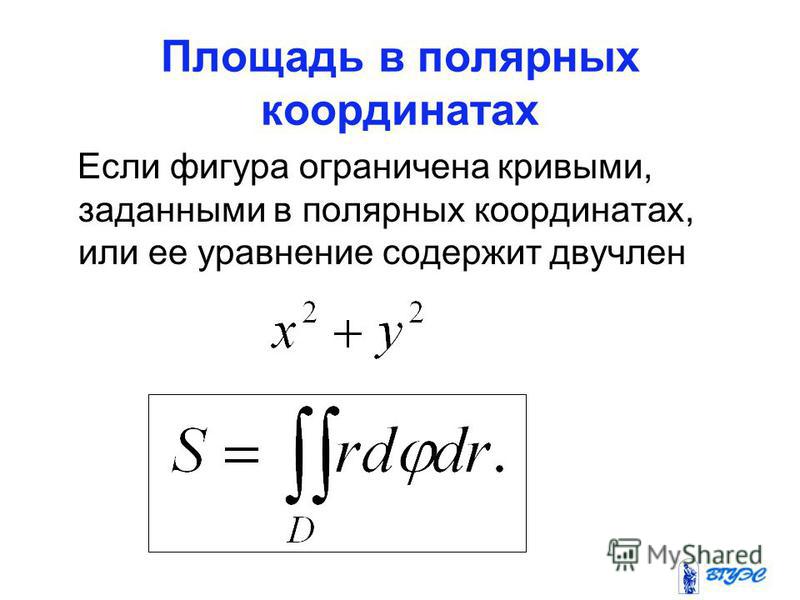

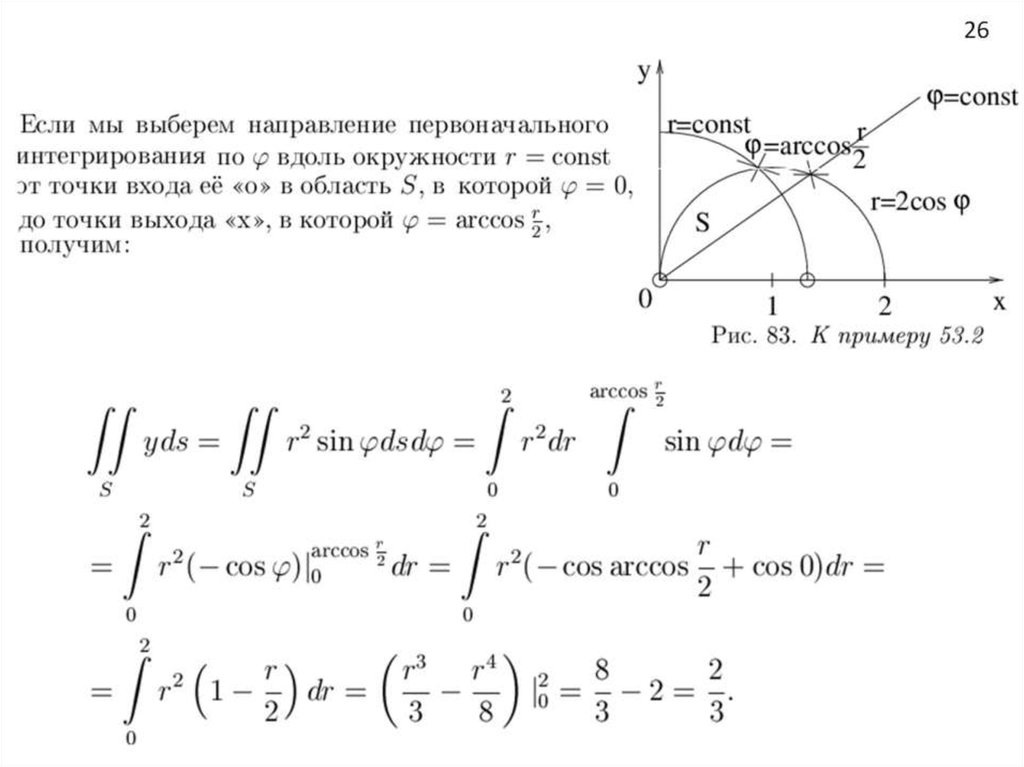
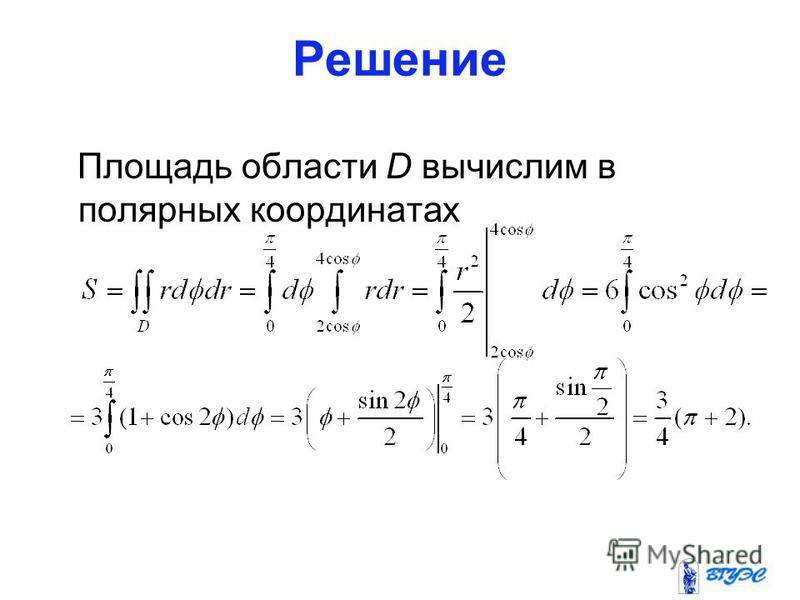 ..)
..) Вычисление двух последовательных интегралов позволяет вычислить площади функций с двумя переменными для интегрирования по заданным интервалам. Здесь вы можете научиться решать двойные интегралы и многое другое! 9n_{j = 1} f(y_{ij}, x_{ij})△A \).
Вычисление двух последовательных интегралов позволяет вычислить площади функций с двумя переменными для интегрирования по заданным интервалам. Здесь вы можете научиться решать двойные интегралы и многое другое! 9n_{j = 1} f(y_{ij}, x_{ij})△A \).  9b f (x, y) dx . dy $$
9b f (x, y) dx . dy $$ 2 + xy с предельными значениями (0, 1) для переменных x и y. 92 + 3 года) / 12 + константа $$
2 + xy с предельными значениями (0, 1) для переменных x и y. 92 + 3 года) / 12 + константа $$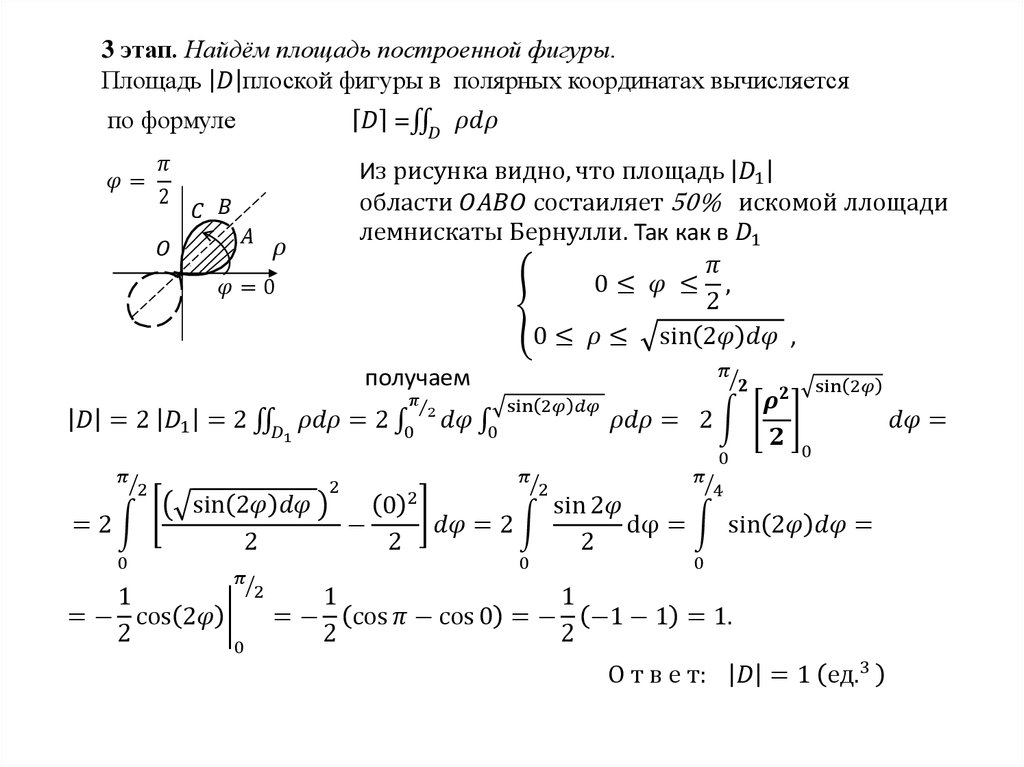
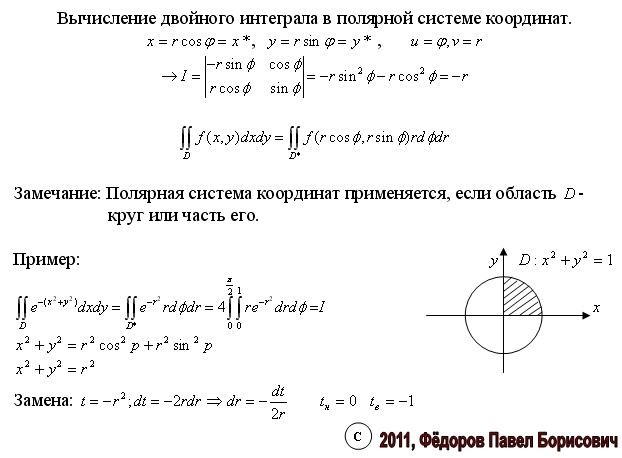 Для получения дополнительной помощи вы можете позволить этому калькулятору теорем Фубини разделить интегралы и отобразить весь сценарий вычислений, связанных с процессом.
Для получения дополнительной помощи вы можете позволить этому калькулятору теорем Фубини разделить интегралы и отобразить весь сценарий вычислений, связанных с процессом.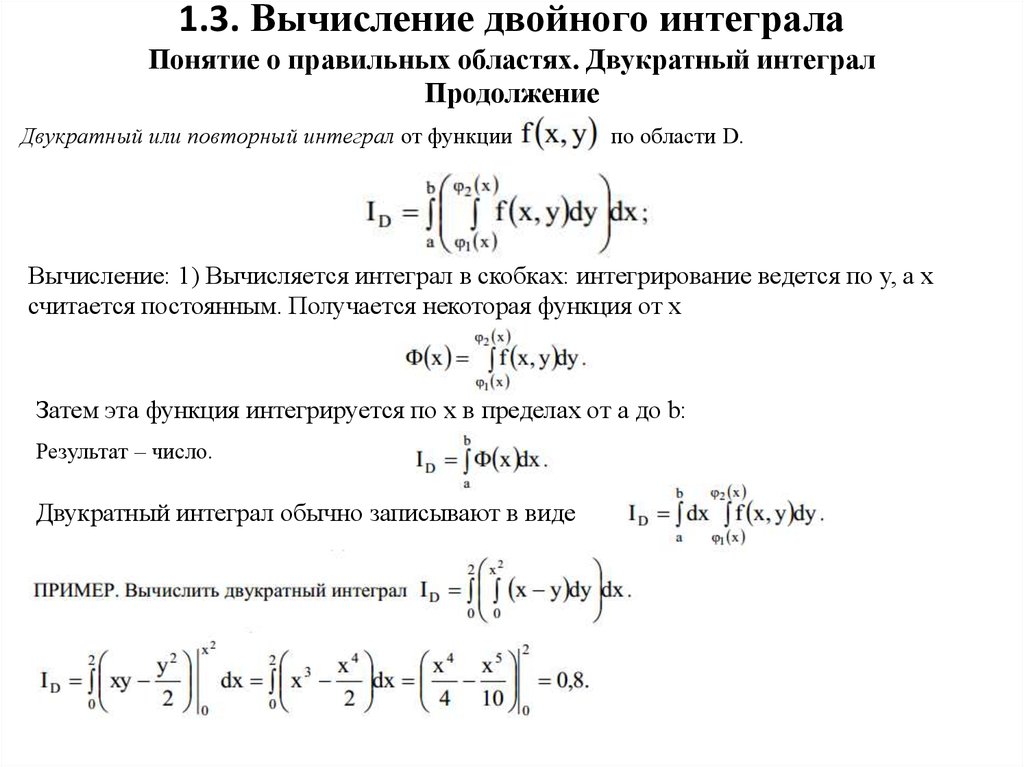
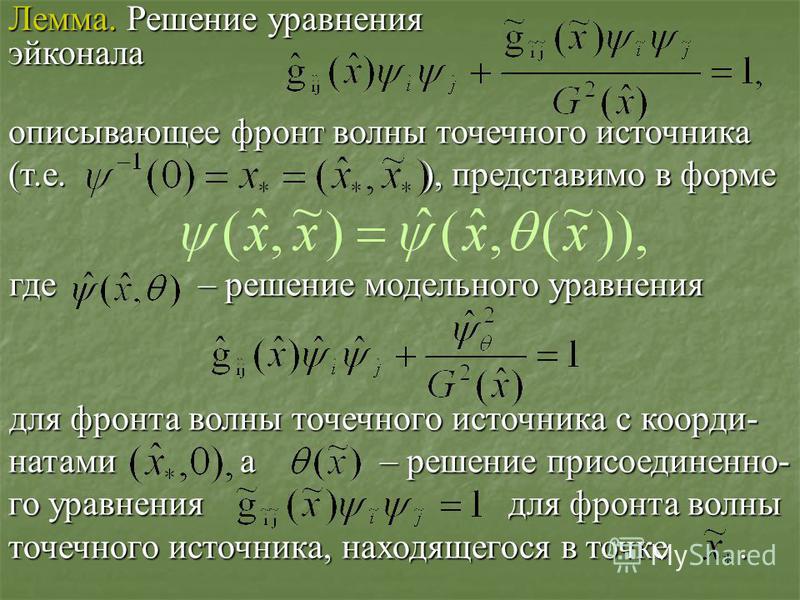 Как назначить встречу с представителем или перенести ее
Как назначить встречу с представителем или перенести ее ru или в мобильном приложении Тинькофф:
ru или в мобильном приложении Тинькофф: Она позволяет ненадолго снизить свою долговую нагрузку, чтобы было время разобраться с финансами. Как подключить услугу «Снижение платежа»
Она позволяет ненадолго снизить свою долговую нагрузку, чтобы было время разобраться с финансами. Как подключить услугу «Снижение платежа» Получили ответ и. о. начальника филиала А. Саидвалиева, в котором он ссылается на старые Правила пользования газом в быту на территории Республики Узбекистан, утвержденные Министерством коммунального обслуживания в 1997 году (рег. МЮ N 370 от 14.10.1997 г., далее – Правила 1997 г.). В них сказано, что при отсутствии прибора учета газа начисление за природный газ производится по тарифу ежемесячно. Периодичность, сроки оплаты, ответственность сторон определяются договором. При выезде с места постоянного жительства на срок более полугода, а также при продаже или сносе жилых домов, принадлежащих гражданам на праве частной собственности, собственники жилых домов и квартир должны уведомить об этом организацию газового хозяйства. Вот, пожалуй, и весь ответ по существу вопроса. При этом возникает множество других.
Получили ответ и. о. начальника филиала А. Саидвалиева, в котором он ссылается на старые Правила пользования газом в быту на территории Республики Узбекистан, утвержденные Министерством коммунального обслуживания в 1997 году (рег. МЮ N 370 от 14.10.1997 г., далее – Правила 1997 г.). В них сказано, что при отсутствии прибора учета газа начисление за природный газ производится по тарифу ежемесячно. Периодичность, сроки оплаты, ответственность сторон определяются договором. При выезде с места постоянного жительства на срок более полугода, а также при продаже или сносе жилых домов, принадлежащих гражданам на праве частной собственности, собственники жилых домов и квартир должны уведомить об этом организацию газового хозяйства. Вот, пожалуй, и весь ответ по существу вопроса. При этом возникает множество других.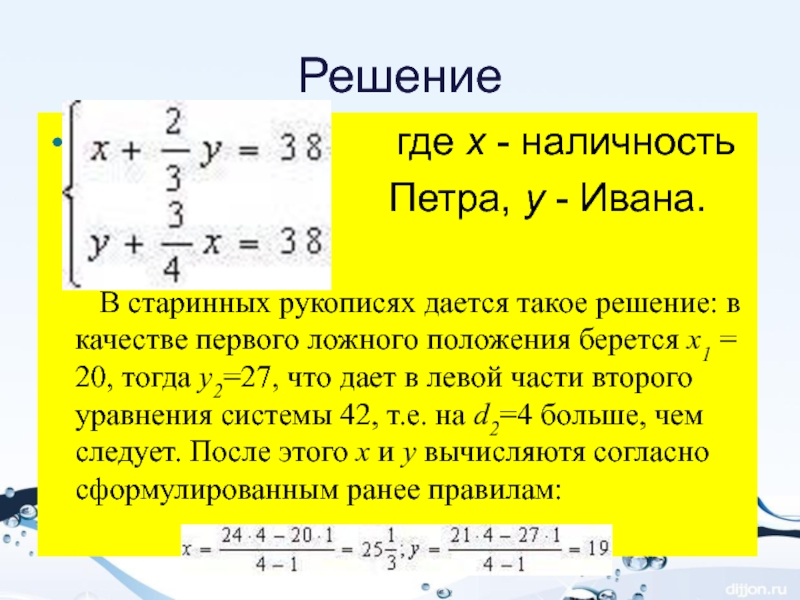 N 2 к ПКМ N 22 от 12.01.2018 г., далее – Правила 2018 г.) решение этого вопроса не рассматривается. Они составлены с учетом перспективы создания автоматической системы контроля и учета газа (АСКУГ). Но предыдущие Правила 1997 года еще не отменены. В соответствии с Законом «О нормативно-правовых актах» действия представителя газоснабжающей организации не вызывают нареканий.
N 2 к ПКМ N 22 от 12.01.2018 г., далее – Правила 2018 г.) решение этого вопроса не рассматривается. Они составлены с учетом перспективы создания автоматической системы контроля и учета газа (АСКУГ). Но предыдущие Правила 1997 года еще не отменены. В соответствии с Законом «О нормативно-правовых актах» действия представителя газоснабжающей организации не вызывают нареканий.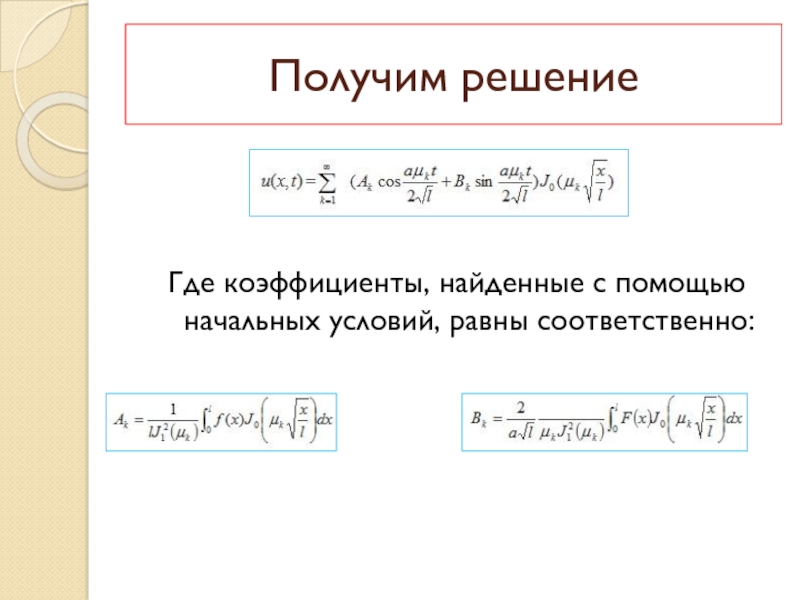 Сделать это не поздно и сейчас. Вопрос будет актуальным как минимум до 2021 года. Предполагается, что к тому времени системой будут охвачены все потребители без исключения. Поэтому газовики должны как можно скорее устранить пробелы в законодательстве.
Сделать это не поздно и сейчас. Вопрос будет актуальным как минимум до 2021 года. Предполагается, что к тому времени системой будут охвачены все потребители без исключения. Поэтому газовики должны как можно скорее устранить пробелы в законодательстве.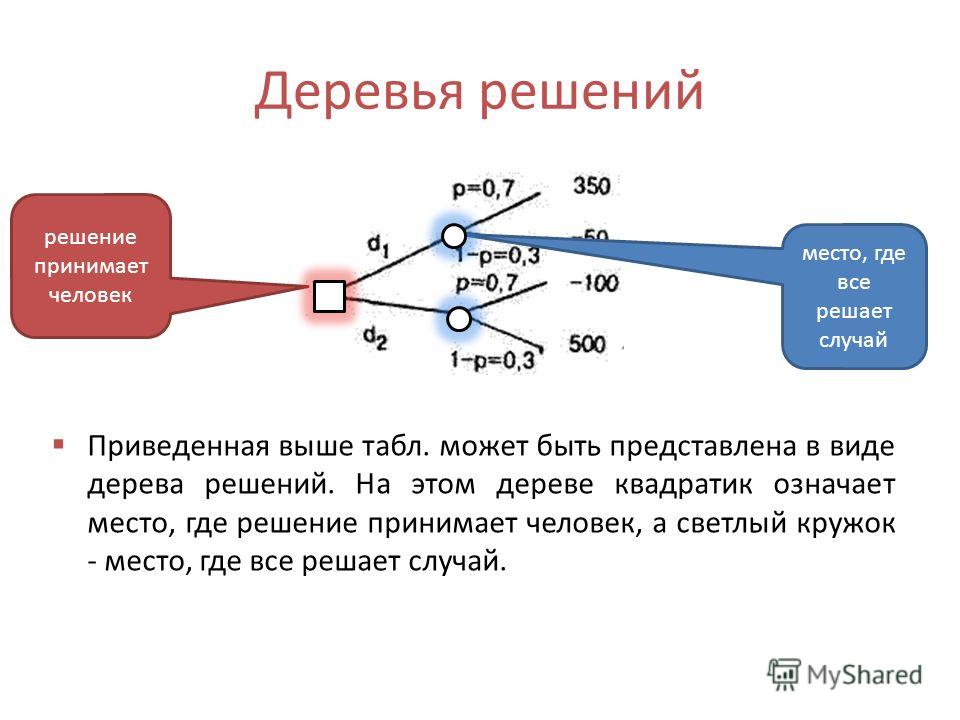

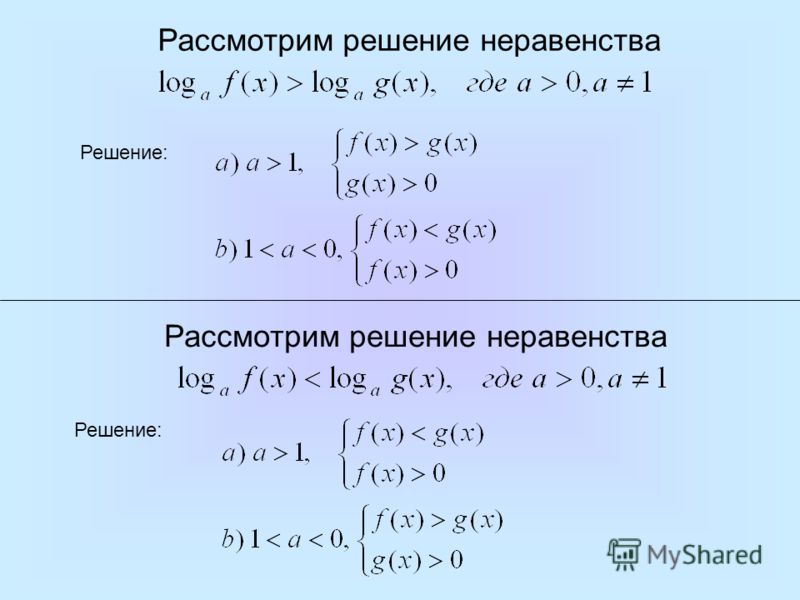
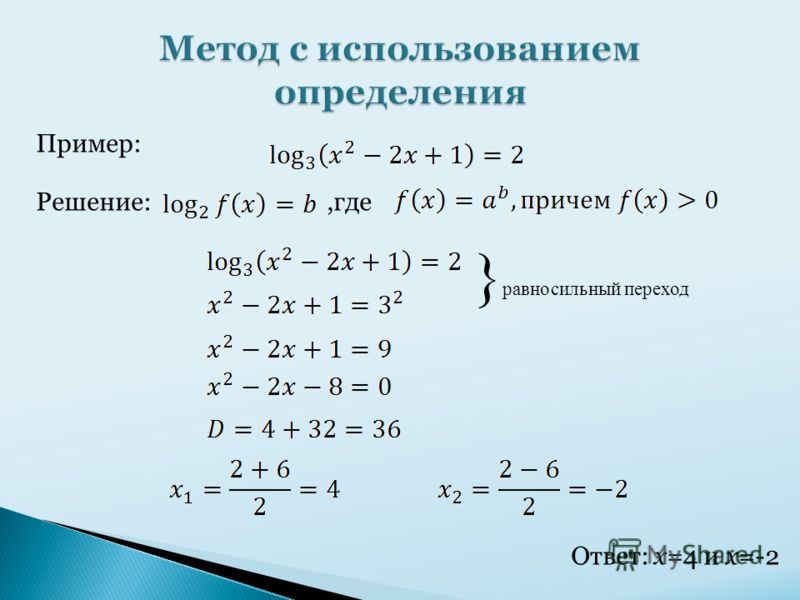 Эти три случая для пар прямых показаны ниже:
Эти три случая для пар прямых показаны ниже: Это означает, что каждая точка на прямой(ых) является решением системы. Это называется «зависимой» системой, а «решением» является вся линия.
Это означает, что каждая точка на прямой(ых) является решением системы. Это называется «зависимой» системой, а «решением» является вся линия.
 Я имею в виду, можете ли вы сказать, просто взглянув на…
Я имею в виду, можете ли вы сказать, просто взглянув на…

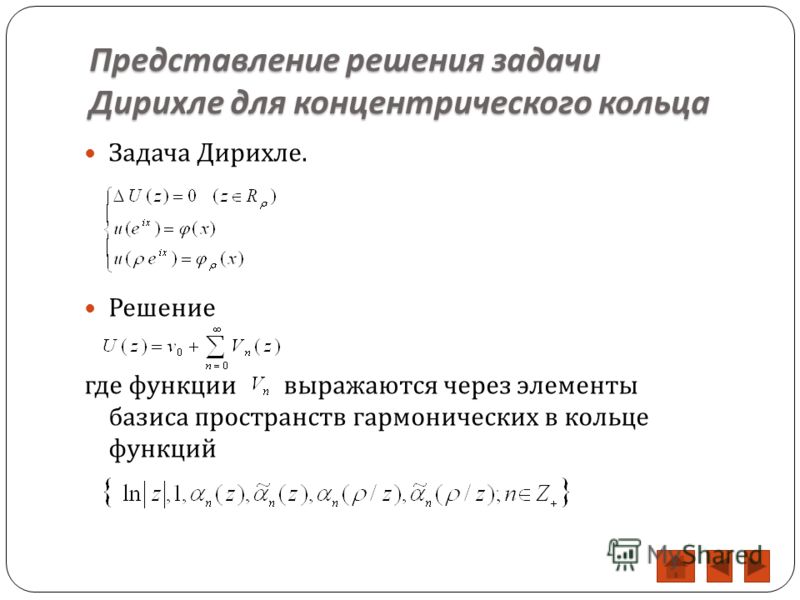
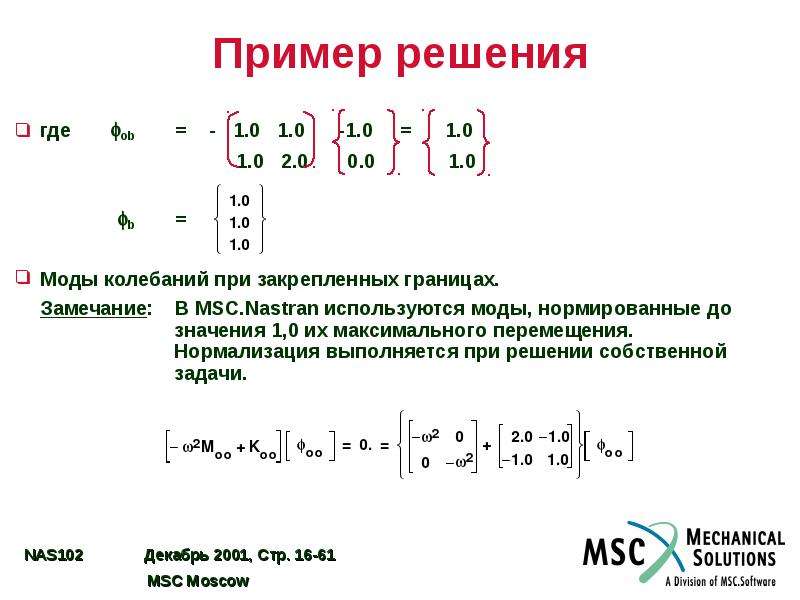
 Поставьте уравнения для всех xi по порядку.
Поставьте уравнения для всех xi по порядку. Например, взятие x2=1 дает нетривиальное решение x=1·A31B=A31B. Сравните с этим важным примечанием в Разделе 1.3.
Например, взятие x2=1 дает нетривиальное решение x=1·A31B=A31B. Сравните с этим важным примечанием в Разделе 1.3.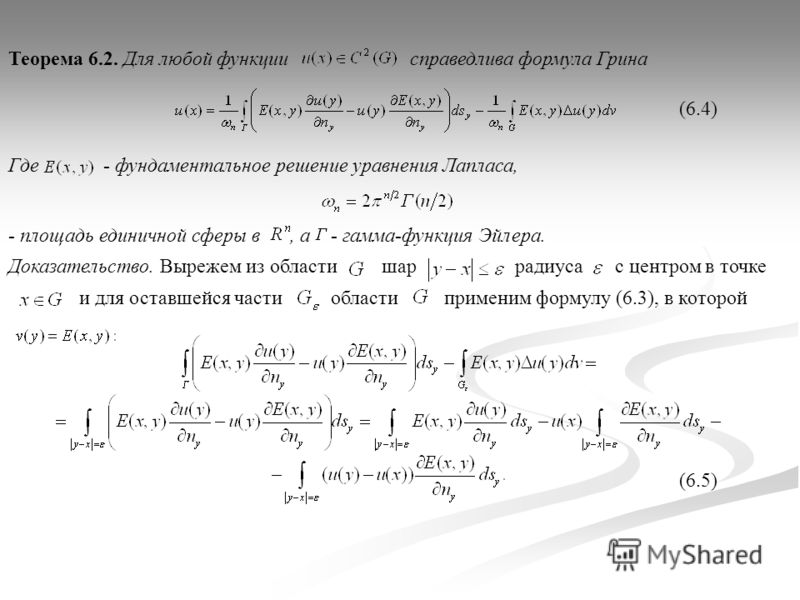

 С другой стороны, если мы начнем с любого решения x для Ax=b, то x−p будет решением для Ax=0, поскольку
С другой стороны, если мы начнем с любого решения x для Ax=b, то x−p будет решением для Ax=0, поскольку
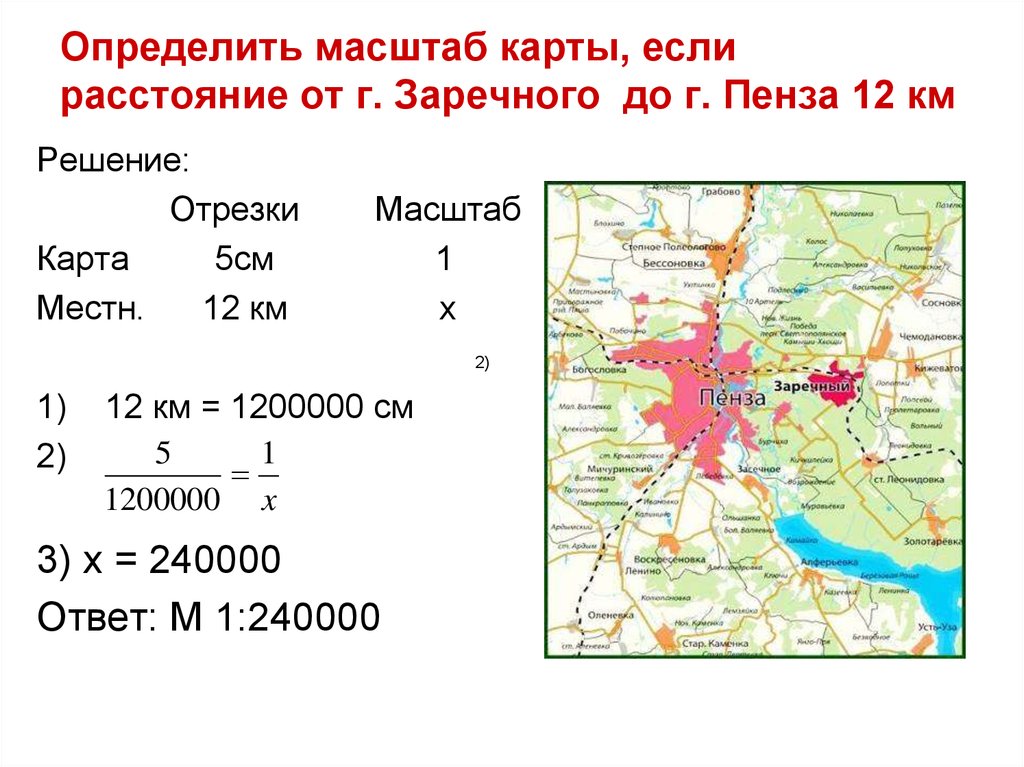 Значение
0,1 мм для определения точности масштаба
принято из-за того, что это минимальный
отрезок, который человек может различить
невооруженным глазом. Например, для
масштаба 1:10 000 точность масштаба будет
равна 1 м. В этом масштабе 1 см на плане
соответствует 10 000 см (100 м) на местности,
1 мм — 1 000 см (10 м), 0,1 мм — 100 см (1 м).
Значение
0,1 мм для определения точности масштаба
принято из-за того, что это минимальный
отрезок, который человек может различить
невооруженным глазом. Например, для
масштаба 1:10 000 точность масштаба будет
равна 1 м. В этом масштабе 1 см на плане
соответствует 10 000 см (100 м) на местности,
1 мм — 1 000 см (10 м), 0,1 мм — 100 см (1 м).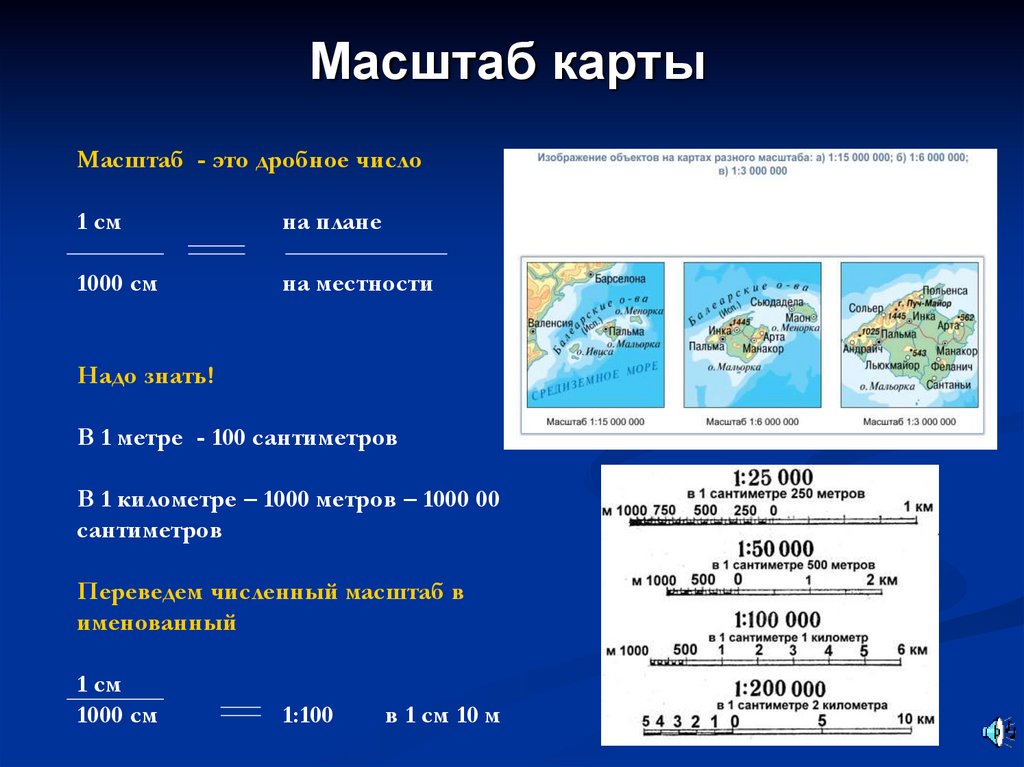 5’
5’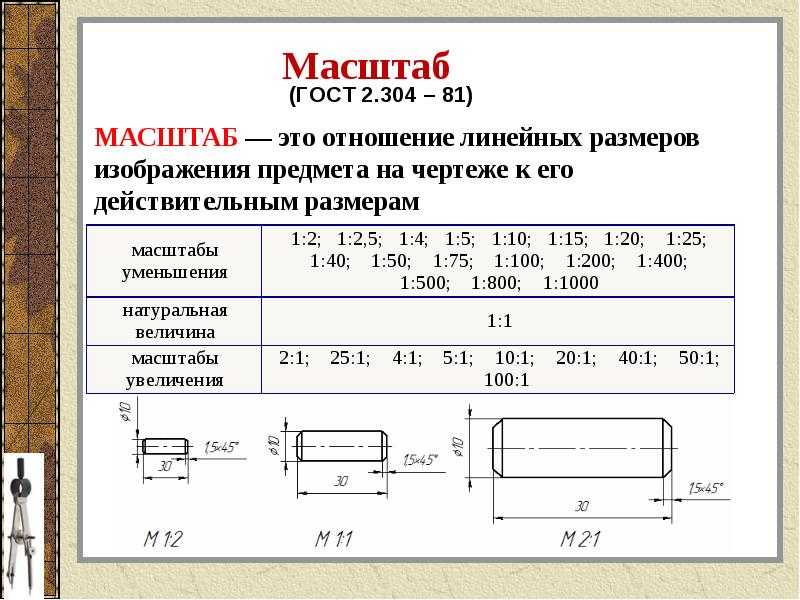 Поэтому
необходимо уметь определять отметки
горизонталей, используя отметки других
горизонталей и характерных точек
местности, подписанных на карте.
Поэтому
необходимо уметь определять отметки
горизонталей, используя отметки других
горизонталей и характерных точек
местности, подписанных на карте. Если искомый угол получается отрицательным,
то прибавляем 360°.
Если искомый угол получается отрицательным,
то прибавляем 360°.
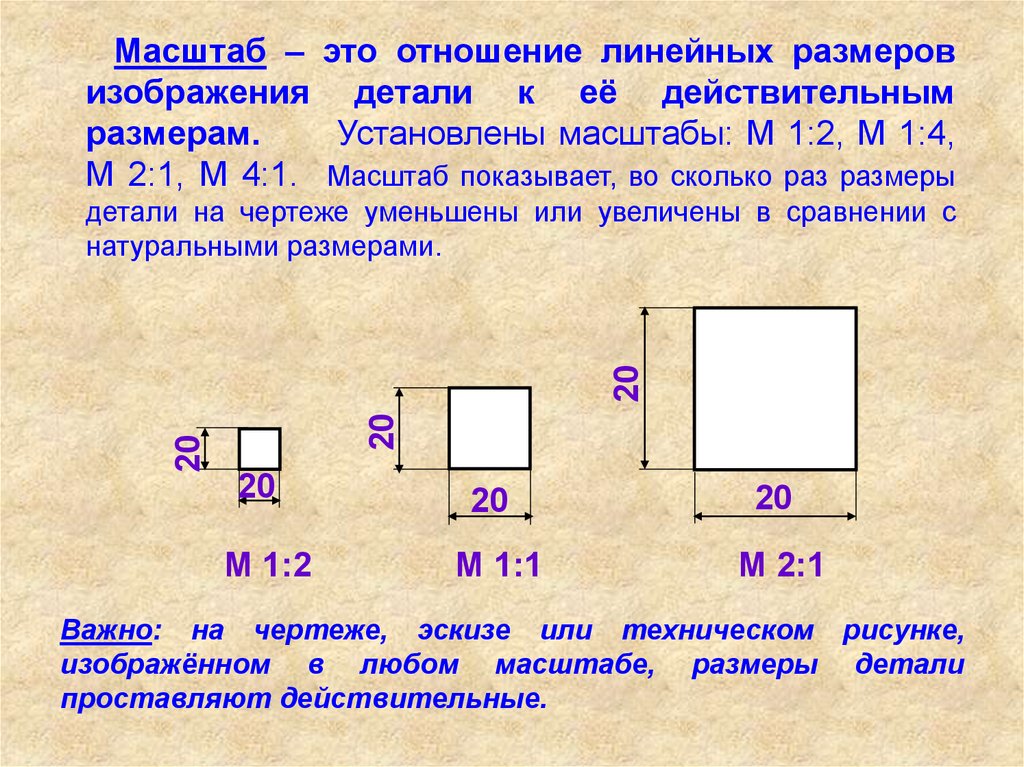 Он используется для рисования увеличенной или уменьшенной формы любой заданной фигуры и для нахождения недостающей длины, площади или объема увеличенной или уменьшенной фигуры. Следует отметить, что масштабный коэффициент помогает изменить размер фигуры, а не ее форму.
Он используется для рисования увеличенной или уменьшенной формы любой заданной фигуры и для нахождения недостающей длины, площади или объема увеличенной или уменьшенной фигуры. Следует отметить, что масштабный коэффициент помогает изменить размер фигуры, а не ее форму. Например, прямоугольник имеет длину 5 единиц и ширину 2 единицы. Теперь, если мы увеличим размер этого прямоугольника с коэффициентом масштабирования 2, стороны станут равными 10 единицам и 4 единицам соответственно. Следовательно, мы можем использовать масштабный коэффициент, чтобы получить размеры измененных фигур.
Например, прямоугольник имеет длину 5 единиц и ширину 2 единицы. Теперь, если мы увеличим размер этого прямоугольника с коэффициентом масштабирования 2, стороны станут равными 10 единицам и 4 единицам соответственно. Следовательно, мы можем использовать масштабный коэффициент, чтобы получить размеры измененных фигур.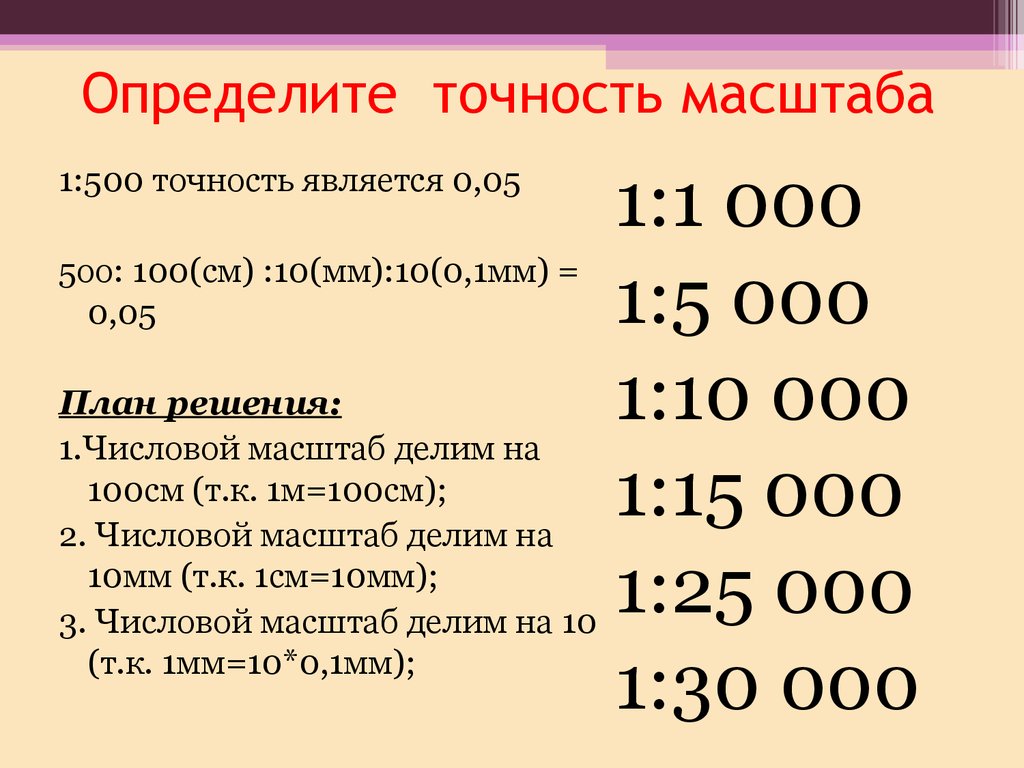
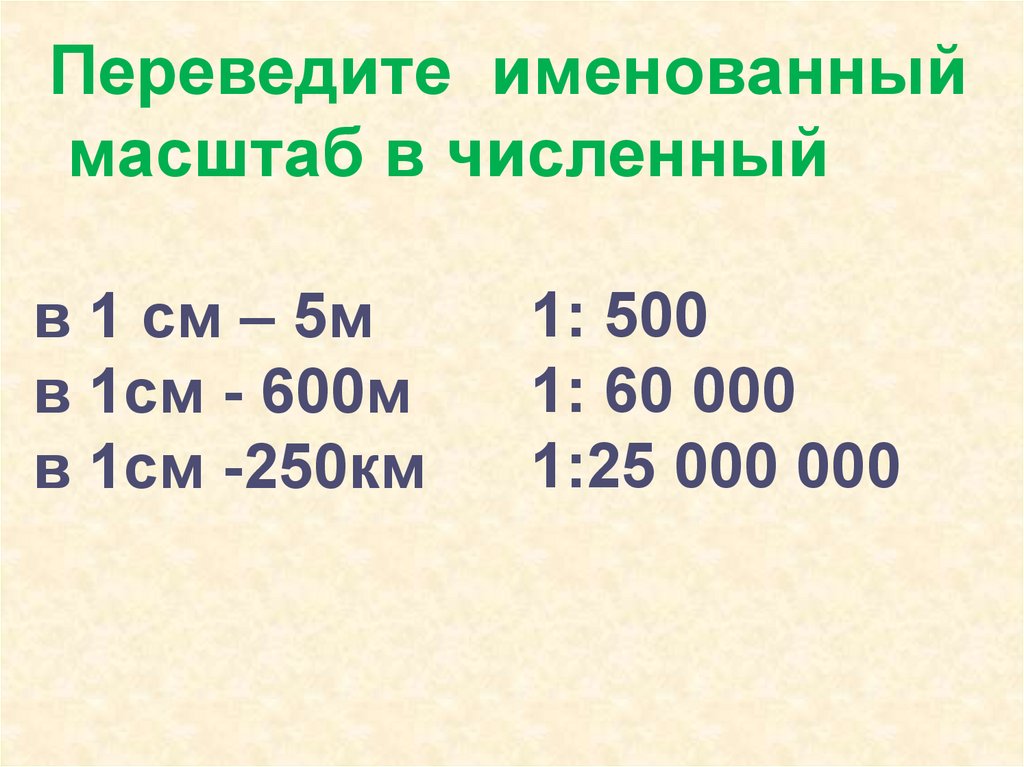 Например, если размер большей фигуры равен 15, а меньшей — 5, давайте поместим это в формулу, которая дает: 15 ÷ 5 = 3. Таким образом, мы можем видеть, что коэффициент масштабирования больше 1.
Например, если размер большей фигуры равен 15, а меньшей — 5, давайте поместим это в формулу, которая дает: 15 ÷ 5 = 3. Таким образом, мы можем видеть, что коэффициент масштабирования больше 1.
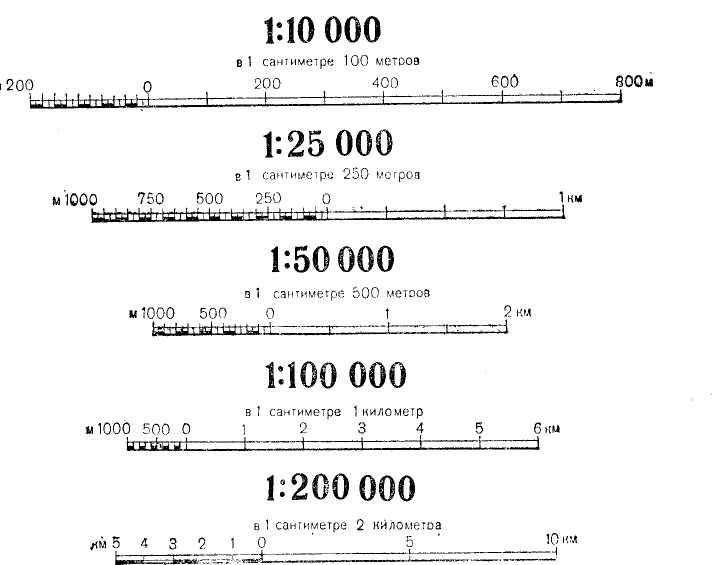 Это означает, что изображение увеличено.
Это означает, что изображение увеличено.  Найдите размеры исходного треугольника.
Найдите размеры исходного треугольника. 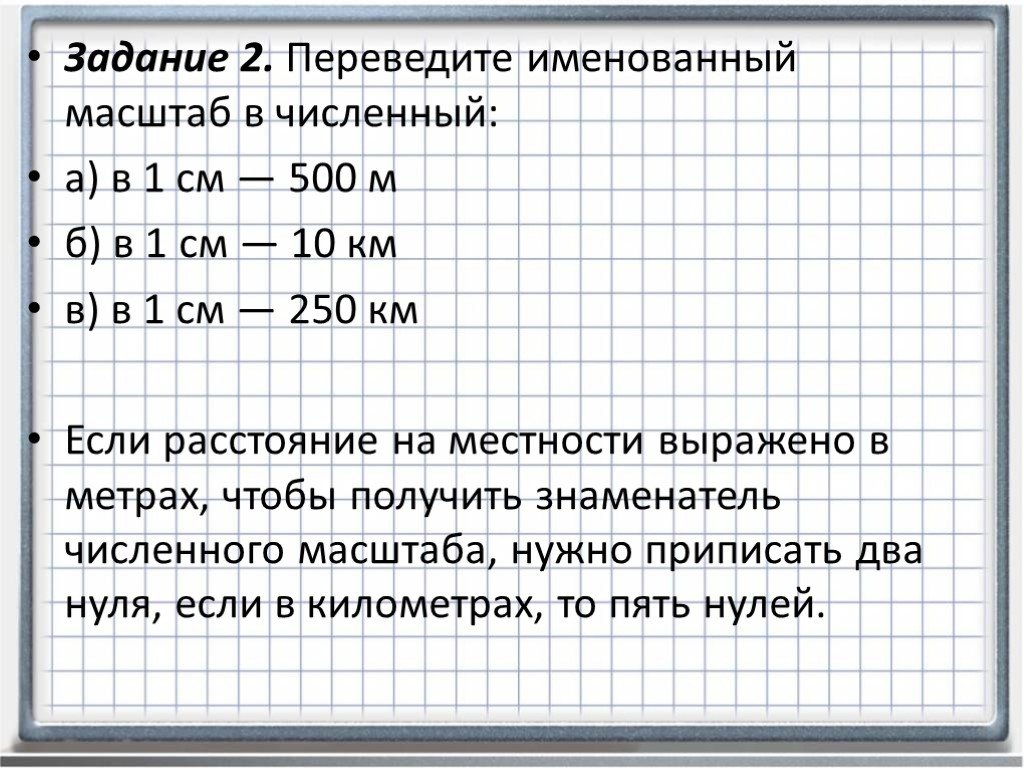 Это число, на которое можно изменить размер любой геометрической фигуры или формы по отношению к ее первоначальному размеру. Это помогает изменить размер фигуры, но не ее форму.
Это число, на которое можно изменить размер любой геометрической фигуры или формы по отношению к ее первоначальному размеру. Это помогает изменить размер фигуры, но не ее форму.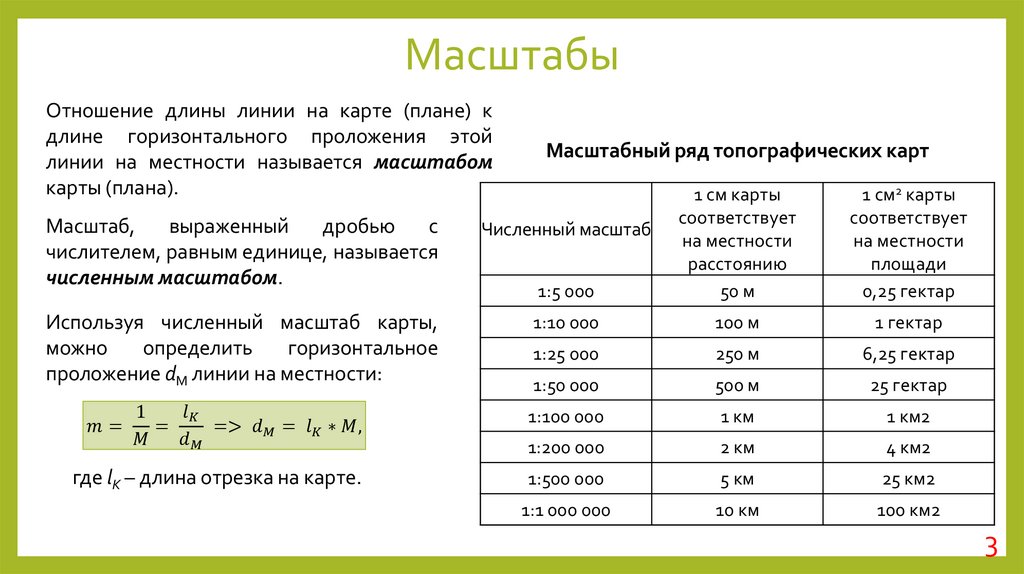 Основная формула для нахождения масштабного коэффициента фигуры: Масштабный коэффициент = размер новой формы ÷ размер исходной формы. Например, если длина стороны квадрата равна 6 единицам, и если размер квадрата был увеличен так, что длина стороны квадрата стала равной 18 единицам, давайте найдем коэффициент масштабирования. Мы будем использовать формулу Масштабный коэффициент = размер новой формы ÷ размер исходной формы. После подстановки данных значений мы получаем Масштабный коэффициент = 18 ÷ 6 = 3. Следовательно, масштабный коэффициент, используемый для увеличения размера квадрата, равен 3,9.0005
Основная формула для нахождения масштабного коэффициента фигуры: Масштабный коэффициент = размер новой формы ÷ размер исходной формы. Например, если длина стороны квадрата равна 6 единицам, и если размер квадрата был увеличен так, что длина стороны квадрата стала равной 18 единицам, давайте найдем коэффициент масштабирования. Мы будем использовать формулу Масштабный коэффициент = размер новой формы ÷ размер исходной формы. После подстановки данных значений мы получаем Масштабный коэффициент = 18 ÷ 6 = 3. Следовательно, масштабный коэффициент, используемый для увеличения размера квадрата, равен 3,9.0005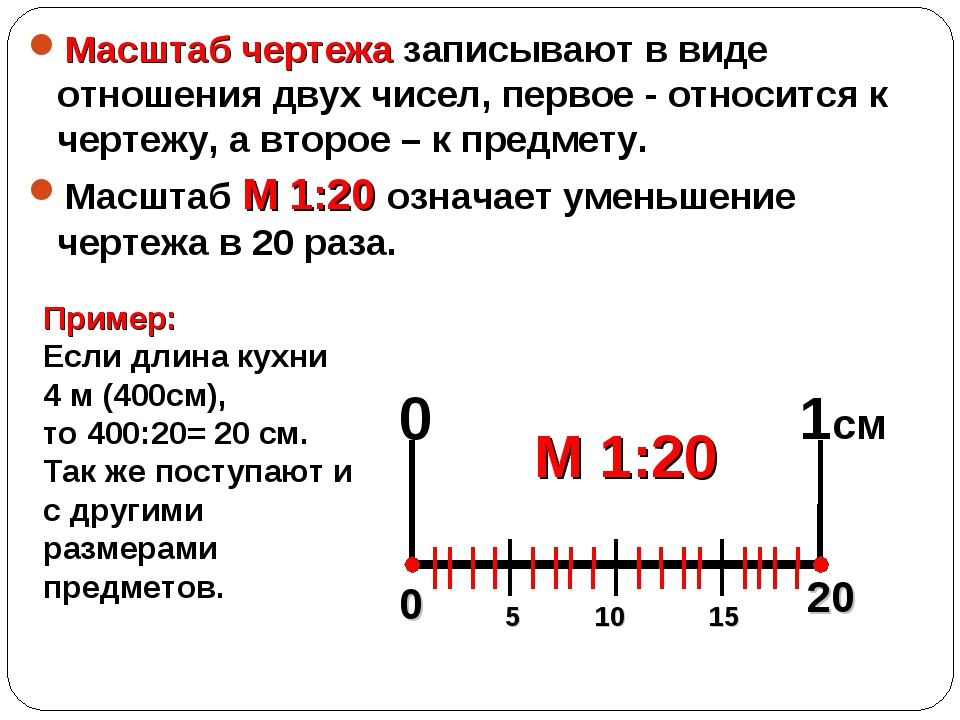 Когда объекты слишком велики, мы используем масштабные коэффициенты для расчета меньших пропорциональных измерений. Он используется для сравнения двух похожих геометрических фигур, а также в других областях, таких как приготовление пищи, где количество ингредиентов может быть уменьшено или увеличено в зависимости от ситуации. Масштабный коэффициент также можно использовать для поиска недостающих размеров на подобных фигурах.
Когда объекты слишком велики, мы используем масштабные коэффициенты для расчета меньших пропорциональных измерений. Он используется для сравнения двух похожих геометрических фигур, а также в других областях, таких как приготовление пищи, где количество ингредиентов может быть уменьшено или увеличено в зависимости от ситуации. Масштабный коэффициент также можно использовать для поиска недостающих размеров на подобных фигурах.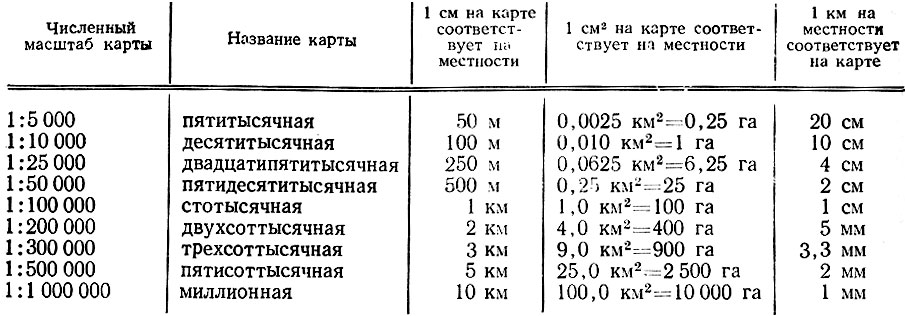
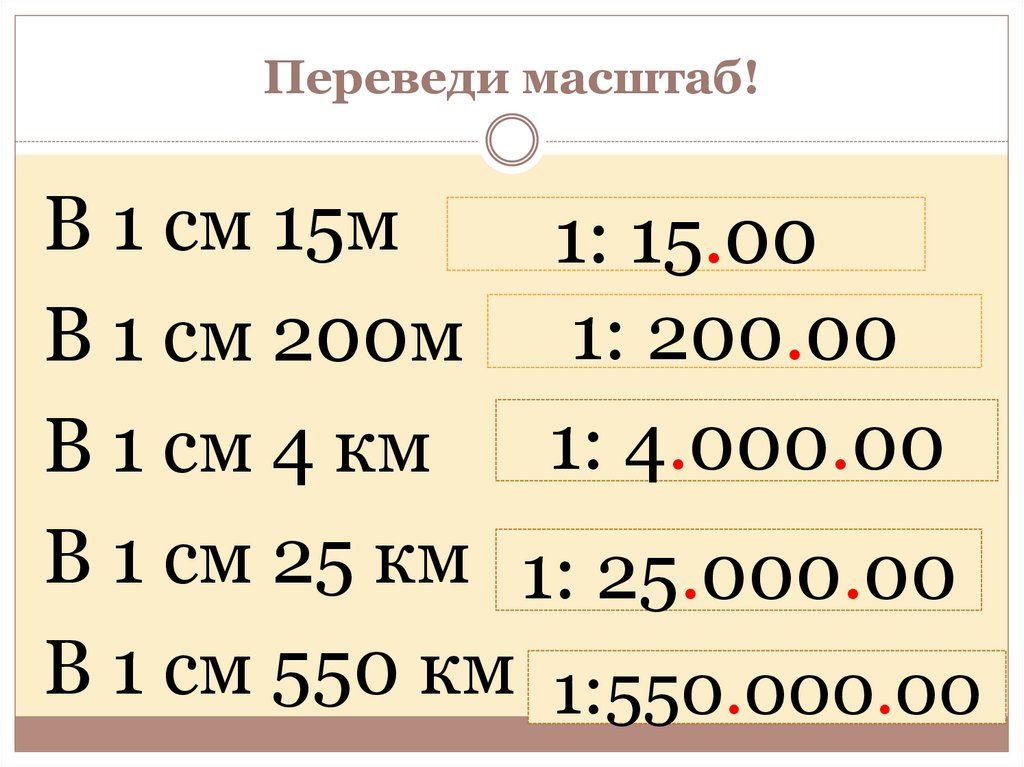
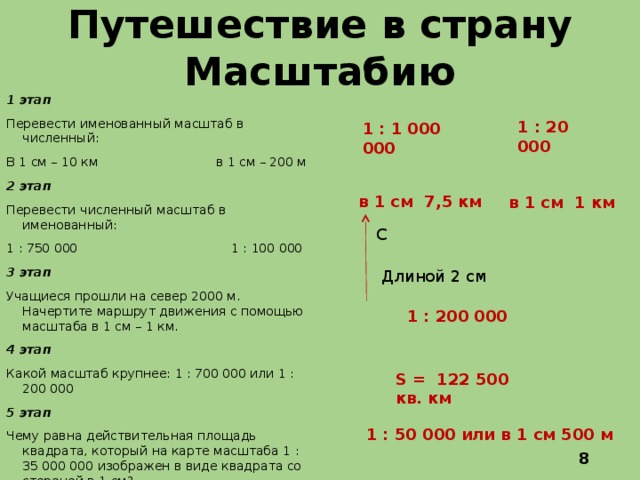 Читайте дальше, чтобы найти ответ на вопрос «Что такое масштабный коэффициент?», узнайте, как найти масштабный коэффициент, узнайте, что преобразование масштаба имеет много общего с преобразованием длины, и забудьте о проблемах с масштабированием!
Читайте дальше, чтобы найти ответ на вопрос «Что такое масштабный коэффициент?», узнайте, как найти масштабный коэффициент, узнайте, что преобразование масштаба имеет много общего с преобразованием длины, и забудьте о проблемах с масштабированием!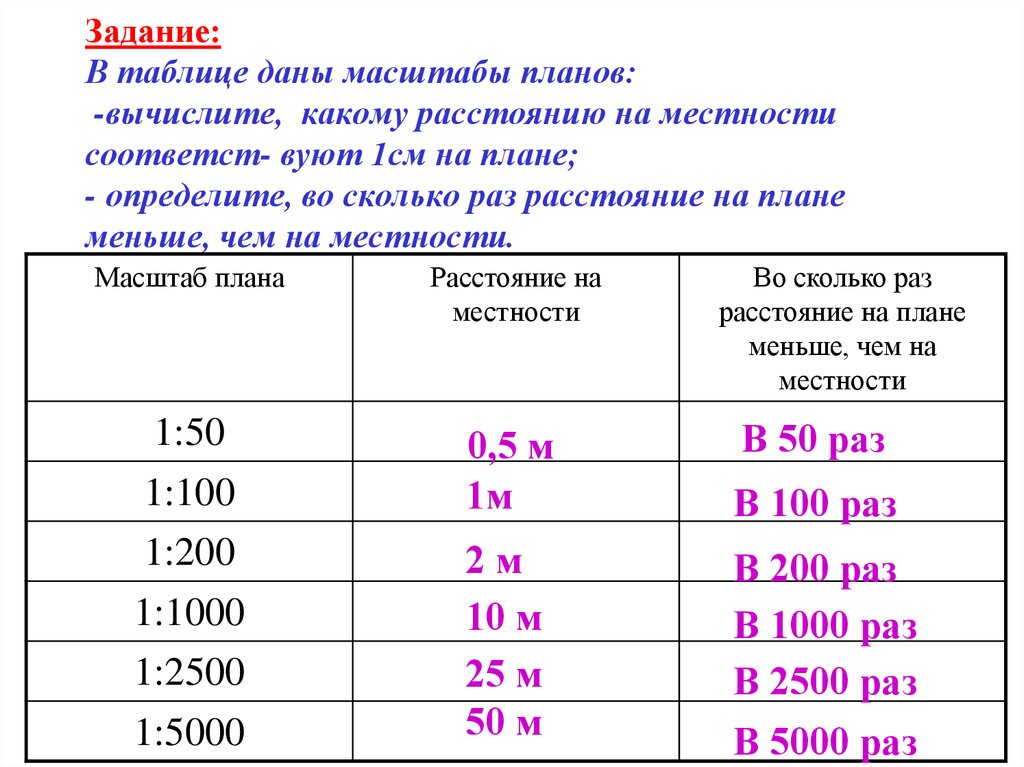 Любое соотношение двух чисел является правильным, но обычно принимают одно из них за 1 , например,
Любое соотношение двух чисел является правильным, но обычно принимают одно из них за 1 , например,  Также мы можем встретить описание, указывающее размер масштабируемого объекта в процентах от реального.
Также мы можем встретить описание, указывающее размер масштабируемого объекта в процентах от реального. Вы можете найти этот тип преобразования на подавляющем большинстве графиков.
Вы можете найти этот тип преобразования на подавляющем большинстве графиков. Масштаб обычно говорит о соотношении между масштабированной и исходной длинами, что означает, что каждое измерение должно измениться .
Масштаб обычно говорит о соотношении между масштабированной и исходной длинами, что означает, что каждое измерение должно измениться .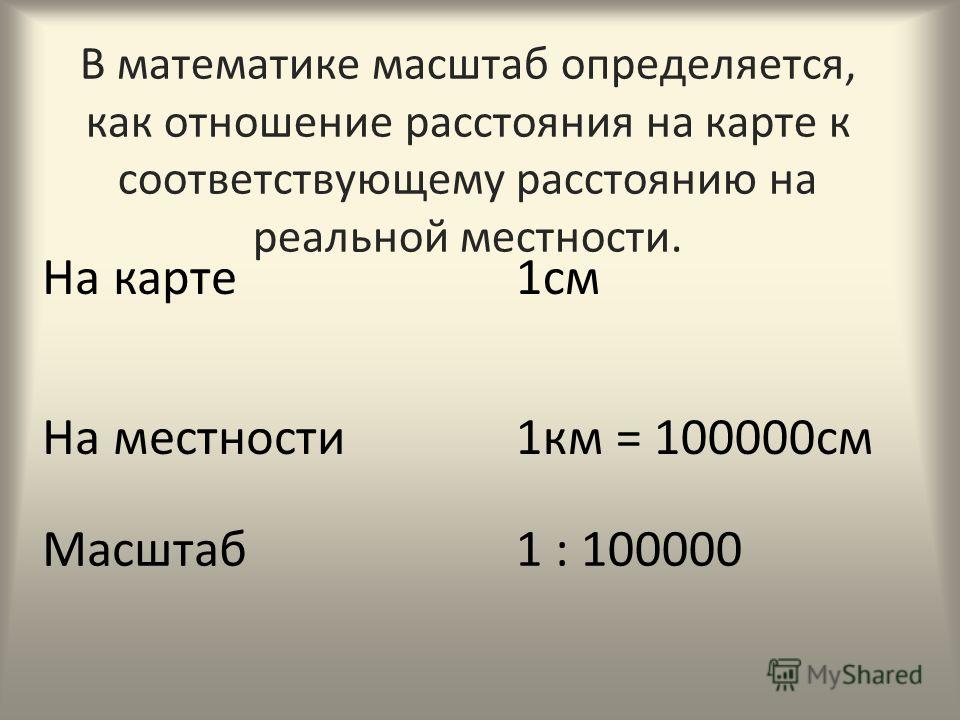
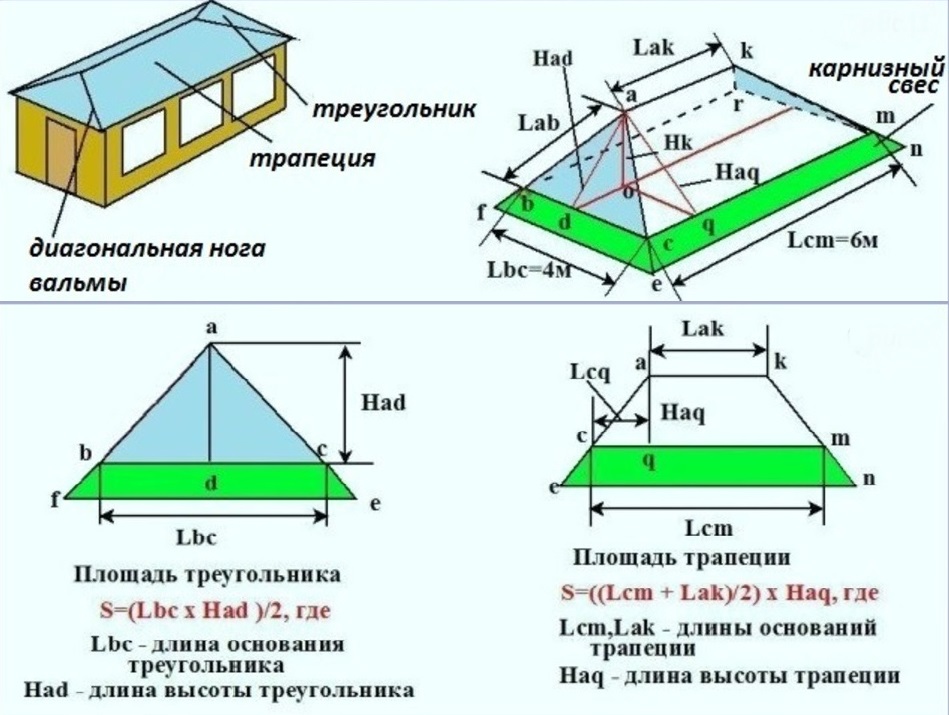
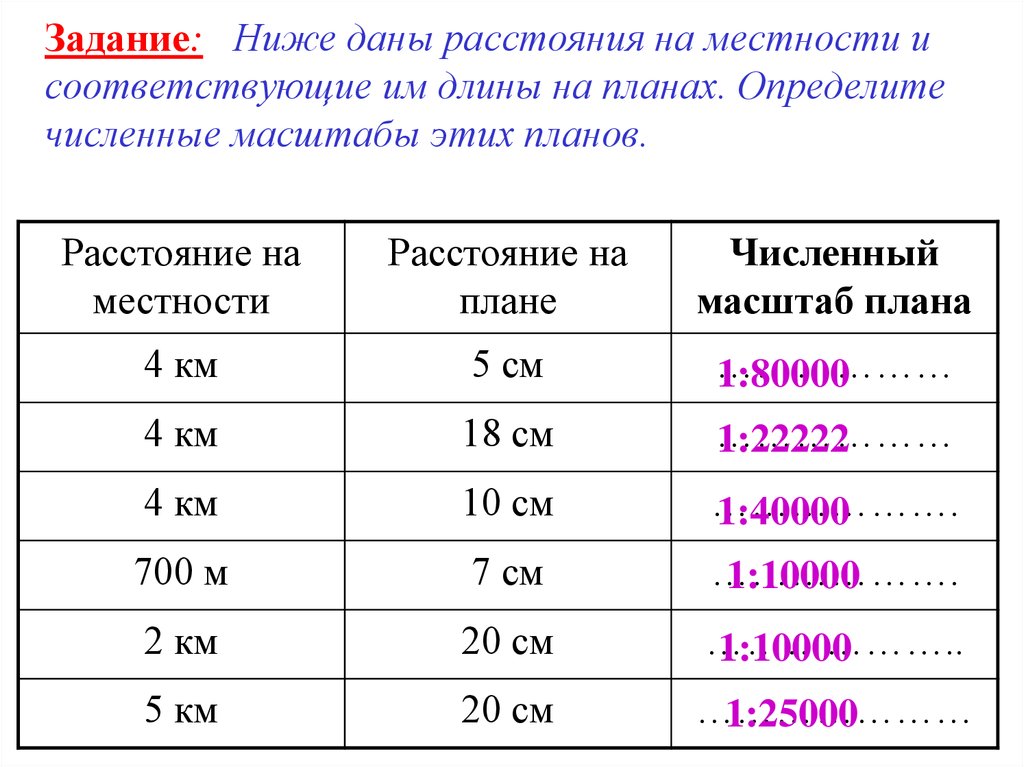
 NET разработчикам конвертировать JPG изображения в PDF формат несколькими строками кода. Движок конвертации JPG анализирует исходное графическое содержимое и экспортирует объединенное изображение как PDF документ
NET разработчикам конвертировать JPG изображения в PDF формат несколькими строками кода. Движок конвертации JPG анализирует исходное графическое содержимое и экспортирует объединенное изображение как PDF документ words as aw
fileNames = [ "Input1.jpg", "Input2.jpg" ]
doc = aw.Document()
builder = aw.DocumentBuilder(doc)
for fileName in fileNames:
builder.insert_image(fileName)
# Вставляем разрыв абзаца, чтобы изображения не перекрывались.
builder.writeln()
doc.save("Output.pdf")
words as aw
fileNames = [ "Input1.jpg", "Input2.jpg" ]
doc = aw.Document()
builder = aw.DocumentBuilder(doc)
for fileName in fileNames:
builder.insert_image(fileName)
# Вставляем разрыв абзаца, чтобы изображения не перекрывались.
builder.writeln()
doc.save("Output.pdf")
 Следуйте пошаговым инструкциям по установке «Aspose.Words for Python via .NET» в среду разработчика.
Следуйте пошаговым инструкциям по установке «Aspose.Words for Python via .NET» в среду разработчика. Современный бесплатный онлайн-конвертер создан для быстрого объединения нескольких файлов в один документ. Это приложение для преобразования PDF в JPG отвечает на просьбу упростить отправку, совместное использование, печать и просмотр документов. Вы не должны тратить свое время, выполняя эти операции вручную в настольном программном обеспечении. Наша цель — предоставить вам наиболее эффективные решения для оптимизации рабочего процесса в офисе с помощью онлайн-приложений.
Современный бесплатный онлайн-конвертер создан для быстрого объединения нескольких файлов в один документ. Это приложение для преобразования PDF в JPG отвечает на просьбу упростить отправку, совместное использование, печать и просмотр документов. Вы не должны тратить свое время, выполняя эти операции вручную в настольном программном обеспечении. Наша цель — предоставить вам наиболее эффективные решения для оптимизации рабочего процесса в офисе с помощью онлайн-приложений. 
 youtube.com/embed/1zytpAa1Pug» srcdoc=»<style>*{padding:0;margin:0;overflow:hidden}html,body{height:100%}img,span{position:absolute;width:100%;top:0;bottom:0;margin:auto}span{height:1.5em;text-align:center;font:48px/1.5 sans-serif;color:white;text-shadow:0 0 0.5em black}</style><a href=https://www.youtube.com/embed/1zytpAa1Pug?autoplay=1><img src=’data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAAn4AAAFmBAMAAAABk4o4AAAAJFBMVEX///9AQEA1kssyMjLo+fpCi7FPT0/Cys7d3d10dXWYmJh5rMTb5mXtAAAwGUlEQVR4Aezat3EcYRBEYQood+qv2jwgbXoQUQC4CK5ODV2qadKiiICZkjH0GKfeC+GrXr1vdrgL6cuPGGPE7rbjfiqbD7+TkuoyzPD7UFk1gv25lUqzmOFnVlmaTezPTSn9itkLfl6S8lcEfmYPudHiLuzwK83vBn5mwq/VhfLLGr+Gn3J9GY3Y38dL9ud2ksr/flN4sb9Mfef4tTsp1RN+Hb98uvQBuX6Uiv35lVTXcYmfmZQ1wg+/ws/vRKkaL+HH/vBrJKVmMcINv84HEPwelPoTdvjlRr/u8HOThF9rf1l/7y7DDT8JP/a3rS6yeh+A8avFFHb4SQuOX7eTiywtJvx65z/fD79kf5z/tnr9nePXev74HCPsOP/lAr/e+S/88Cv82uc/O/YnJX4dv8zPI7YTfvhV6fNlbCf88JOq48f+lC0//IQf+9vm+6uOh47sr/3+PmxA/DalxSV+bg9Z3f3h5+8Pv+b7Z/wyF5358fyrRbzg53XyoEz+v/KT9GX+j7zzSJLdhsGwFrjAxL0DD/Di+l+gatIOZTj1xuECDupRv+qlg2be9l3A4QpP9UJfzkKzuyVVTSCcDf9FcXL66gcJYUgqePzSDdetgnv+qH8OP/5hIEf2Bqyfavcecu7/iMvPgYNGvY9fe7X4OWj+NzVe7jD6EMx0k/fYm/79Hz+Hzv+wpUgGcPIa/APfDfHb/hzs/g0TGJiywQ24yE9xiN+2fRh4/tfQYEAEmvKkaTBb8+8fbAPvHyTrAKKKaDvYAbB32Tsq67nX8Nne8a/t97/Fmn8xxCGDydhVRhCgatIqop3xwFzBb0Dqh7+eX7z7txyoYOJCgX/3+Rufx8v/zErGrmmaVYmapmYCkZ9f27Zf7n0ejx8APll2XdISiaxe1czu8Y96+51EPL/E4rbp1CFZNYzKq9bOLwm2/tkoME4yvndHkjRpY5lN1wCJfPyuQp5/RcztSnWKaEpPph+TpDqrAR8+aheL9lEs/3FFFfNJJ4bIJdXGOQba+X/Pg/mPrDvp1EXPJKqrmslVt7my+A00/1LueWnB61VSfcVwLt+9iuU/Awg6cbsvS2c1Myo4lh8sosUvCLwc3Od04Kom5/aZ6wfR6qe8HOznBviKs4tRun3r2YNg+y/ppPs99hO7LIlxlBGo999lHH65mMIXKpLzY79UasC1fTASPxN4rmLZslPJOk360RofFfP7OtjzP9jCd+CXnBAtgMkx/xq/QPWX6ewh3z5t35AtUbkxgzYLvoLz+KtQ/gPn2UPK7JbbWPoRM1VUxq9po/GrTroidFPEaeiT1ux6/las/JkKkr+7zWkpIBXzW9i/3yLd/87VABkht0Q2AQzH+Pfl8XEo/3WSZwK/Us6h0wyl/BYLO744jv9Q4UQ1JbEQNYZSEstpoJ2kf3NWo0Jp+bk52Ivy/F+y60I0jeIxpTvZbZR2/OzSlwCVPv6jPQg1f/Byarkkqum2Jpsmo69JeQBEOb848Yue33zCTws1smzmV1x+fv5oL9D6IbbpQ8b1vFdNgTpNMq6iMlNh+W9x/SCK/5BvfkWHXERXDZfoZKWbrDAluweuUbz78lkYfiY+0WTo8ryR1uX4+8TEnEuGKV9SxI/W/L6/fHBwHImfrJX56Ssmi8Q7m4l5mblv+L3kUv/V38bxX66d7v41nsx+NHz0prYNezNg/kKTfsDFT1/4di9U/C63DPI8usGHmwkOYp5L5pfW/Ij+d/zIOsxlSOTGYQi6+WuQUVoA78owBr549emve6Hid64jfha+KJi288A51GXSR1y6+7d9ESp+acNPeiWtwSXUDTJOOrf/6KpXKH7mv6Sqsu5nAIq/kEf8UjG/tv18L1T+vJzpTrPyxVQg45czx+w/lBye02svkv+oOmm2etU0cEw8O35S7j/j9yAOP8NFxDsBniVbnWzC1/yHstVX9eL65vLL0wf5ha3t/Q/Fr128ETFckb8pPNiV/ii/4wd5T8jxo+N/Iz/QLT6CibIAeALf+G0lH6F08+/lg5vt9+DBfyd+kbubt53Tb+ydzU8cSdbus9WpzjKr99F5FR68R+92js4omGKVo6k7YN8dklfvZyha6TarskAU0JsaNWqwV6CywPYKRAts1ndW/c/dOFGVRY1vZTkTY8p91U8l1VlZWQv/+ok4kfF1Pn6Vy+Aibz0fl99Y9dUuv7nOnqzgZxjxOhn6+viV5stLHjfw0sqbZy/UVJCl/+qX37XA78V0fmLidW88ZovvnV8+a3Ze+rH9ZmlyaeZk+VX/pfVGL3cuME0kFioh8Ffnv3G5m620wff5kN9SHMNs4r/eANMkBUdu1tuZ/Bxgvor6L/+8rRHK+q/037/Vqv8Od6r4mWuKBtw4t1+f/2bh2WjO6U2b+KqiGMtvo/aLPr6tksMUtVMP1dFfLMCAK+s60neGIR5dYWFI6cICQUSex/UiMxGIwWwM4BFEcHCGLBMIQUzghv5LJ72T1imdaTpp1bj8N9ejVJ6mk/6rye/gE/xI+RGIFIQQE0oxCCr37pgMVAQDGXLzysjBKegR+wJELMqboKLhH8FR4/ihZokA9C8qLT/GK2mEE99VnSRVeh297yTx0zhulyr916j+072fXwlhihZv/MeOlYAzEQZFaKywVJbPXgCgIEBgFBA8HGgIiZiMACRMDBONB8joDgdxzIjfUJP2S0dZ5J10YgQoHOnNf9J4qbymf5PfB5W3JGkJMvpP1cR/OzsveTa/vym/wrnoLSembLI4iqdGuj8BxnGBwhTE8Rp5MmIKGBgHiOIugIIAciiocBFZAThDZApXgBqV37iovNfr3IHycfEt42+D+m/tUBcvoIKfA0DKjw2JsCmYSQADiZiEI0o52xRhFE5EjBNEERUSP0MEDn74NcDwDD0r4IT1hAsSgWCGpuH78dd///d/f/q5+vewZHpcBaZp0/ir/Ha2bQU/8iN+wiQceZEtDByMZzAZjyBbnG2jEHLCBfQvyhderAOLGC+G2ZCYgsSo+cRCMDq8xKteDLg+v9oLo2sQ7KUakW9Z/x3q3k2Wp/JLIj9W/4EXrw57Hwj+0R4T5PSSiXB1ARPu6/VXe3vHkMWrnXALI4qu/KPefvj4LnwnMCQboT9OvWf2+HRnl+T51c5BL/wgnPUO9J5qVSyPCd3zsZP59tK5MWF8uAzozeOvlt8LM4tf9B/xlQabD+wftlhA3ccgZ7ubgMOGPky1LmHf6y2XkQMD3cuzJMkGi90keeUR6G6Fr18K0G497yYLjnZipfPKUbur36ABv7CrwdOhUe5AAeBE+7lcZl3Lf7p2WveOqKr/mFn49bcMv5LsnbzrLgzsSjJwVrqZeNNOBvG+t93H7946WY63ZH7YZqH+TutyI788Ozh5k1yIodetD8VVcmHDz95k19d+Odl1b5LdE5bX2WXxPtkUVKrx6qzmq92StCy/5cBxPX6h+VzB7/ko/p59C4fTJ074WXJu2/0LWJtnPvBrlfXfC2bG+wMnxUZ+wQBc4Nfa9Xx2sHMpbfWp7X7wYrq7Iu1k61IK+SHzZLu74PDmebH784wm9NTlHUt34L/1OL1ta9RtXfJTA9bzXyus3V+lCv8lH64/vHv3rvstG9vdFivhX2rDGdNKKxmQf7ggZfyFEOe7wqRfw4ACvwVv5WGyR+Cj75hW0hNBgMZo56skxGePBXL2UvhROhAj3y84quk/fU54OmanNVZ5VJus4oionv5bJ5na/1Lv8e2JYKrayU6i6n/LbiUdsPX8/YKVo5fslxe6F+S/f8AIMtz9SXGvHXPh6GiB4Qws9bfFhGJ/IgX9ywP2f1jw4mQ5I7STSzbOBtMafP9A6FlGxtByJmCu579Ul8fcmdZHI73puP7TAFzPf2ux+ewq/Nc77AV1v2EsZ94xu3/JmL5fYP/Dg/Cvp6Of7YjfJgMPM8dU+D9nDANm6r9g8EpKBv5PCxxgEzteSXzg5y2TOXthQX9aAL1+IGD/KBHU9Z8uj9F/4h3w0yAexzijJuOH+q/W1uO7XBU/TgoWkrPITzyRwqGHGdHR34MLJTBEEPPZZkHBQDDkEG5xDgB1XzAHXgT4f10QOnogQW1dKZFQkD37mxQSLExvXooIt3e8MajpP12af0dSgCW/6L+ouv47jGtXnZvKr0UiIPrlG6Y/BwcBbrkl1M48nW3+sMC2P8BN+XV/ygTwtNxiAhjU3bQmeI288mOctZKg/cTLYuKIoEAhZz/rN/04e8IBXIdfnqRP1sfjjHcBMgSQoPw2/uuFtYNMqOh/KQDQ6+C/P2uocFhOCZwe2+7F8gKHchi5O40fRH/M2BHRcsrMYEgIuiztRDz8HxeYzpKozFE7JUOGnmUDWelvB35polr1tdsv+WNtPN9R/F1fUn6qdGL8Y6mu/w4OB87y9Pjh2XMcyi/9IfBj77WSd8FYXb/Ycsvhmsra7k8M98fSfwIYNtTfBBD4ASF2MI6+lShik3hY8c/Sg+tu5gPZ70RlBVSf38xo29x/t63/lJ8nU83PgI5i/QfviJQfzn5ur5FNBqEIj8svBZNlgAlY9JaCMeS3OOJHOPoOxBAIlB+zP1tLknSXQGd/Y0dwzFw3fuSP78R85UrgSX5N6r9y7YezqPYfgnOUHzky/l8zJnrzYCUTdC/Ccx1URs7+yiHIZl4EpC08lfIzVPqPQnUHh5INIj8K0E9Oex+8cPjGeqdga/svefJUm313xu/fJ+u/8QKQmvxekavqP4j8SPk9bHkjhTbuiB4uLD/gEELORjnnC1Z+WG55CyeBE2Ci/9iN/Sf0wwKBxME4m3j4wuYkLFQ4eZYRQDDGoC6/VeU3tZW8PuVttlFDD8S/j+u/Zv7T3uf9l+TBs/0XzvMLKbzt7jJ4JfvhGw6lujvqdzCBXwFud85twbb788iU6j8p+TE9DHiLQoRd9J+z+SUJCYM2Mm8ZJEADfusT/itZzYI05Sj9t7R0u/ZfGpt/W9tM/Cn/MXcXRORRcswG7VZ3U+jZwtrA2SG/Xx6LsHSfkMhGcgFCkKj/Aj8e8vPt/gcR5hOhxchPullom78lKdr9bXEMT1SXn/477yx6rC+NnJY2r/9i5hki4BP+YzltfZDF95lna7gfzEiPWhkRI+o0o+dM71sf8HzniUeUjOIHk/Kjgn9ZvRS52vORn/F0Gjt894j5LDsRe7pHZGrxK2c431X9Fzpg8vQj/9V8/l0N3acXZKbh40clv2+Y0e7reNcLgbXSTQZw7WRBCCojj9LV5Fi78Vbz5IUFHGD+mZ8YedZP9zvJE9J2I5j8w9Xrq16/dcz0qK9jYw+I6rWfVZUPIPXD8lKJMC71VaVN/afhIztGhRZ7jqO7ti2cbHST1i4xQO509VjIbu0SDIIY9n2eDSy/29IGiQxjCl9dgmixZ1jk4R4AeddNkj3PeN5zhqA9OiKhumSy4YfJnkPz/r+7sODSaKVlGo5G9V8e+VU3+/m5UCzh4hJEjClIlB9ZJwAXnh0hipkdGxEzHv8gQ4XSl+csDm1lMxz/YIiciGhE8iyWXr+0ABcFCYGpLj/tANQl0k+XPiVd2hveK75a0tJ70//c2H9h6f4rQoVMOX9ILLggYYGyISfCxCzCYKgMBGKcA1w5vk6WSAwMiVUzCgCCQA/jxcJoN0QB0PePGY6FAdNo/C1uzRmD8EdHVX/g+sev4UCljn9sdcr40bD919rp7e9KJT+240kFbGCAES9nyMV3gSp+CxaCgykpMDkU7MCW2ZpYJxKMU8he9KZnmbApRHtRHUCANCm/dzj+9qsuEEmb979Efjv71UtXueRlBCAaz4DxrAwF5QUeWqtwei4wE79Xsgw2XF4SgBhgpkfpiQiHtgvHKw39lwSAvyrBzx//7XUCv9s9/2rihW1GlRyipPxAoHgWT1w4HEFljB4EMJyDTMAnqFEjtpvfmsiv3d87EbsT4o5ChgE14ZenaecuFJcGa/S/VftPN36+rOZHIzwwSoYMyuLM0HMimgQ8hMgo73IGDo5IRiT1AgROIn7IacSwOwxJkIb+S++K4BDeiGCj9l+eHITRt+NKfnRzwg4MjEAQDDFuxFDRxB9u7jbxF+VFcghyDFiyV/vJ6p5nhdzYf0mefJYCuMl5u+mt4q/mnV4lwjxEEBJhkYI/a/5pns48JtdHp+Nj+v+JtFn9p/zC4BvmomHJFmYpcFt+dVKdRFppxXU9xgibx1/ld/iS3XwAGgDEhnArfvU3d60xzTfPh/Zs2v7TvIPbPCf/BRlCc371GdYmnJcTehvVf8pvjnkvBUOR+VryhzZ9/o2DvxeMuYpRj191UsHyNc4+lk+81XDrxE3N/NcJU9dWB/gtaNZSy8kLs1ci5eXro1ZLWXwb9v/p1Psn3jHmJHaAgaE7338j/ei8rtJG8VfTdh++FFSrHNIRb4B4RjfLjcTM039pGl1T3SKMKiNDbTWo/8q5L9UYvARxQXpG4PLBlQgAs8Fc+E3y0Gevj6QrPyYLbJo3elpp4r9y7guqJBABCZjISJSBY7KiIp4Xv7EBdfVGWUI7ST5OL5iEv06+1sn39fE20Vcd6Y1N2n8692D/ZAaGxa08OdjzbAlXnTDR/AMxHONZLB+v/Fz5RVDlCppwTK6XGV/KA76xR+/ef8F+h35G3p52friWJLvekunHsrDnBYSj1n5nLXlFc46/ut/c6up4774JdSbU6zXYvqRZ/ZfuhMEPAlX7L3/7NozsnLNIf/ft2+tuesnMdPTybdCJYL7xo9P78dfp+se/Px33rP7jHzq4UVcN4m+ZNgWMKm20PMlid1dHfM9F5Hl31RvQ0TaLEIHmyC9Pda+5Wvr3bu1WTN6k/afNl/1tmYGhnXpn5Chj5v42O5FnyQVLWA7HgCHj5um/Mb6lGdIBOp2bW0Np4/ovDQ8f+xeYocXUe6aHicdwLrPn7gPxcvR3DhLwHPlpbrKgT+dHqctPlTd6/o1Zfwef4gdaKfnByZuMvC7HhGE4zItfGu1XYwblkoKoya+p/3Tfkuqx87L8eqJ2v/QfaCP1kR8BjudZ/3X+d63UeA35pU36/5TfE/qE/wA8yomG/JjayYCUH8QBbn788pCfouQzVDXBf/9C8Xctdj5/il8hz1ojfmCY5Fz5sSk87lVTfFIuVItaquRY03/Nxz9WddviT/Lzoc5j5WcBMOe6auZvwkI8l/ZLudPwms6frJUW5UvVf6lOXTufzW/Y/nspgd+mYRgrkd/jt0GOzdzih66fKWup2Yr80jrPh53Hf1fLbU9n8ztNXrDyswxndU6pP8qSoG3hOdZ/j9eD9N9ZVoKfGz/Sm/ihec/K9ZczZz5vvXKz+fXD+FKy5wGfv7AsXv1n5SgLk6Y72+znx6/zeKli+VsZPm9TfvNy/z89ov9mb9u5tYuZWkm2kuTgWJTfJjOT4SRwPNp0+sG6ufX/5Z3/pZkS7rz9MrH/5Hj9+ex9N2YyaIf+g4LEDP0HiLHJefDfTxLEc33+fVw13X5pCr+8vgEn9w+b7b+wa9jaJfvZ8ZcEgAFI+Tl2of1nOEyHLuAM5vn8ofymElyaEj8a9j+v19n/L858HtjZzx8JlJIA1I/86FHiIWEhm16bG780HKtDfut3Wn7zcfnVt9n+a4Wpa0+8oZn+SwQOcCauJQIgpxnpdHzAmDk+v5WpuSej7qgNrUj173Paf+t12n9rh+W66Vn8GAAz4Eft518es+Ojb0n0spnn8+/TESidBa5HUGx1DJnduv6r7b+1g8P9XfF2dvkVDCWRH9n+T+I5+I8Jhngu/PJROyMYsAQ1XMofCJb4mvtvvH9Yzfov1XWr5wDP9h88gqwN/EQE77OBobgciXG/mpLf8svVfzXib3qg66bxqfIrkZ9h6V6yFFf5LrHWfwzMlV9MlDBs4856AG7ef1Xbfy1d9+vheHb5JajYUj/TgaxswEN+DNWc+5/VIkvTTXfb+FE7/q4Ffrv+U/7reIOhuklQ71gMCK//wuKgml/9l8RURU+rFlT+P/7L6xqwVvzNw7rBta0XBMYs2WuCygi9e3sdulzEEBE2LkBz9l+epDPXz6yv36r85nX9F8c+LgizRUXJ10OIRAAhwHp4mi+/Ya6if6/Et3Tb9l9er/7TvnvtvDI0k59YqBhO3+AcGziIzJdfudVXUK9CGp0b+y9NasffVsD3BAUcZsnxiC85ZwwYIIYzMOTmXH5Hc4Q6UxcsJGka8m+Vajp+FEL6+th/efXTx9Yuo6kM5qWpaxeGOxQPX6qOKldnjvjpu47/1trnvWyXx+g9039pchBnrqGxHOakiuKmCIev4dmIq/IbAwz88gaJW0ePNDPz98Rl0+eN+ZEeKpo/v6h/moM6LL76KS/5qTSNaiQ7Il0t3Vl7dekmDfXTan6h737VM347SprNYv5xkt//6aSR9GxpHTCROHNd8zdWODdd07EP+v+Un+rH0kTaJ1NrApsaOY/5G9dLfkuV+UPXymXntxTPnV8+M49g8N9kAN5SH9WYxpvu61P1hHHz6oxlq5dcgxP9Nv2X/7j+dLIC7ORjdvlHWZAm1QnFd/wMGPlNJ572Dg+yAfsaNuPfIr880fzTJYdQgLfScYK8qiwh3nYJvp3EvrTVqR56e+XrmctwZCi/KX6av7tsBIdDN9gIcNLZR8xeO/Hcor6dse6D6sUPtuY3F3+TNNNm3EQm/XppGn4MjefJX21V7npwsH/JdcsmCwDz9fHLZ3ajLK3f7ACzVHuL/InosaQPLlV9zzuHx4yasu4uHjzMXfPLqxPCJeEBZKkcGxl6qZ5KdrPT12rGigOq+RTh+NEu7kAm6MuV37wsuOPdnfQ5YqINWAuf3l8j/Cq/Xam58tvzD9kdPbG5u+SXVvhQP8bnsAkjrUeG6584FN+460+Rb+VJOr31p1sWg1FPup/454v57uNHBcIhv/WJ/fFrSJGViS+HA8tV4UP5HVxQXUv55QVhR/hMEfGd8qsxjjY5HlJXpVl19t9U+6Vxy84nHjXEjpn9n9R/BjKKAgxVARoyFUNgAllCARAzQPqnLyp3JPIMuz8wcHAEuC/ML0/zfDQ+PJ5dWVvr5d1hT8rqZUe7VPc5l/xyxuygB9OoJBLA3o0rNaPXmIhNPIdTiiwGJCQEkHHG5sdCbAiG6cv3H6T5526Qr3tSVrX+dg4vGTUkxrF3DzMBMOEcYwkETyVjJjh548gQQeGyAREcsRqVDEDQmYMGTgoA+kdfll+5P+V6OcuoubT6q+w7HTDqiESIdO9/diQsYkhBCpPYcvMwFgcSSJCL7wgivQXwhhjCYglik4GwKx35pfsPkvJRdj2+3TYnUl6xZ84rb1FDXszbE9KUFSB5fv3WCwy8FO/eenL01gOg5x6mfSzPdT2rPP9wwuz0d+EWMZ7tSfjGhTPz/PCkKMTJ23cnhOYEm+LT4eEYCYJuUXgDv54m5argt0umFr/FrTTdXc54uHtssuqZOCbLejVg2zsHQL1z5uWXIbVWdqn3HByzYwkf8wNvCa839dol+9dZkieZl439pLX3xf0XC3A5hnQL963rw29emS+qZvUH/JIe5Nn7jEGL/fDDZJcg5irpdZOXYvvbo02yeTm7au30F+zOWriFHdtu2gtnwnT2163WYbIg8no16aSZt2et3v7Bly+/ZYYp9VJThGpaLb7V/A4G7FFDmizLdvNMjLxpXYp5k7nCt/Nt4tMFx5pTC9S9sLKcdV/Is+x09YLPFoTsSr4teL3gQa+z1oWcZgNiu38swX79S2lfA+YLl98kjTO0JrZ4bmq/TsWsGV10/sqjjgHpYeaZNvoLZGwgKbLY3bb+WUaW2tdEwXkGrAuTHiavhNr9ZFv8cssbPloglnZywXSUbouY7qYFJwMSPGwRC/gL13+TM7SaJOJSxbOn0X759JG3iUX7M2XoTeDg7S8ZmXb3kgtnz3atXkRBgPJz+m5C+b0U2G6g7drpwEj3pRjXDt/T0YK3jkb8oKmTpBAA98Avn0ixV8ZhPWpIa79Op2LPiINQ/dla8YOUg9d/Mx6teYDo9RMWzf5mPUf/oeTn2cjZd4JCkmPm/EKE5Owv0KWGBnT2wprAzxl62BLr7oVfHmvAcfl9Wns397H9tA6YOu3+wLFBLX4vGMYHfoEhgYj+kEGGK9Edjf1nJeRGYhuzhDAl52xbAyMsZ984OvorQ9OcsfKDoZXkUtjdB78Ygn99OkGnpp4O7VcxcrR2EFp/XMt+RtnA+h8iPwYj1G6Q/ELpS+QHM/IfPEb88gssJnu9q+u97jfxmlEXMksyINJCfiJyL/w0q3RvXILXm2Rz1O7+ymnjq1vbLI7xaSk/0ryB+iejR2HJY9cXKz8AN/zk7FsYkv4FP0rWEnX/3yjwIwD/8x2DkgGTkY289YHkXvyXagjRcZD6WirTieZafPWYkuz84EJAqKFY70O9FzzIDhSqL+ZE+ZH5Z37swcFrHD5fYEX919vbOycaTjWPC/6TYxDIvstXL+/h+TeqE0JImYyxtnQ/98pd21o7umcEoU4dZJSfAT3LRPmBjYTyq/y4TI9CJT9xll5/a0n50Upr4ISFiFwsvxzyzxMlx4a9kdAEfHJP9V+edDprPw4n8y7VMZ/O/NPY0YnGq2i9dOvO+2Pq/p2ZKLCLMQTQFFDc3SQQGwrRhUYLu5YX4BGzBEPrv+exqSJM8EfflvlXODkmQwyWR/nAsrsP/yUdzbNcZ5eYEuEwHXpnxqLBw9oPbyBNbTKKvy2BhFCywIGfFUAcupssRsMxLy8Q2VD/sTPqP04uCohxUh5MhFJsNX4wG8cg2z23ci/xN84IGs8zX9djiv7p4q89newxa8259l1RPX5nD4R1/wiiR8mAHcvZY47J7pw40tLtqJ1vcsxJa+gssuqfIyautY4lxl+NH99YBKgWEKaCAz++D35aChXgau1EDUpPY0eaTFcYeAt9V1wLHpycZt7QSnfBIzx/iBMbzKbPHyT2mimmP36Tb1pSflYiK40fcrYgVlHRmB+D+xciYojI9s8Z5j74DbfyjPPM6yncOWtcvhMf3lBX8ig9h/0lySggyQbCp60B/EZyKTg9gH+TDXjjMAn8tHV9U35ZnqWXIlY7+mL81XfDmr8ap5deHqXHDL4XfsPJ5IFgwDjrSPP4SvXGaoCa7aO3es4OjBpywXXZh53sKhMjG0l2fZXssve2m1338pculOlXV92X+YvAK/Owo/Kbn4Pa3daH650Av+T3HRv5Jdvb80fZ3nXwMwP3wS8fF2FlGLU/7Rgq1bc8Ip+x5rdm8VUZeab7lKwcCMi+D6erAxDktB/OzonsVfjvxc5FuO0VnMHpTwxDW+dwfJrr3cfkfvgJQd//3SKYMs3oWfht61Jg7oXfWOnMXA2TAWfmpseHOu2UQHX5kbzr7fqVXRYn9rq3dyzOOpLTXm8gVNDiVe9crgYWK7tCwEZ8Hr4akP7uvWYGJTzbZICXN414vu5dimz0eh9I77svfqken9LkXuXV97eG866MQU0VxCRwBID0VE+ME4EwPJM4YUIZzQl0A55JmMG4ueYEEEsEIsG9lN+qCR6Tr0lok3dWzxs6ZlBtfo4Vn0ziYRAzA57BLMaBzc0wZnmGiGjIj2l4xkxkQCxg0h3V3+rpMtW08xnbZe/vkUVtCQwMILiR4XjdMWDAMHAjZnDDU1JShvARIQYBHsPL9+m/MqdAJFODcTXmzsGOFl/AoaaY470ON5u2O0Y8oYhgaj3GIHY88ZFHwIjAzgD3039VvSV+Pj6mE0yng14LPc+rA0J9ORDPnhZNMyaqMTNAkV0J8N7Wf1RVggrtdhlYNNnC6vDhg1BTZG43m8+AMem/ceVpAJoDv9GqzAa0KkeOBE1kQKWV+IYHjIEginjaghouyTPzHS0quZ3j6t840X7Jp88OXtOuP334aCT3ERt2ZQ4LnsD2sakZN7jH56wHk7m9/+aq4L6tBW/w21Qyb6U68LYr7nd+t5JOGzrIThi/87uddOBowf/O77bqHe5orp7f+d1KeSfk+li7ZNDv/G7Z+DvYP/DsfvffraNvva6/3/lVbBfWOzjnBgCZAAa8Ycho3QexjReJmOKJXmECgR2TA8gTyDu95jjeOXwzDOPseBkxeyJQ/GDZAQbkYQj2q+WXaqYtffZlapKfFyRgZgOAuYAzkQhcQZaoXIBo4AwJyAt58maIBgx2YFF4YEVOxtKQqAMUIMgwWyFDpNwZTr5Wfjrwpnn2FQrqy8E4gmGOFhmydwCRwMHCABZOwC4Cc3DMTsg5gJWqwLHeFNm4AgyAmAAIUSRoLVy86hTwV1x+1w4b75dDYICMJ2sFZMgDzI7EgQpiMkxlrnMmzyzsSSy4EEdBIDHl8zIBzETMbFEYZlAB78AEZiGKXxpxRr5efoc7YdzcNdoOgr0RK1LAGBTKCGxF2Kh2HAMFe5jCG2LPzrGHOOgPCM4TQJ4RDoXC5AyBjWEnEFcAZD30K2PjvYadsWKJ8H+pOw/eNLamjyeKZcdWu6O5OsR8CkZ/NLCr8pRcuX2KezTRIbaa0UYcWJWn+JXXtlrQWhBbLYiIjfmUL6vb+8VvefDQO/w0Z8t//szZUH7/VRRFPXzXCccB98tS4ByYQANyvbF58uxJmNmLMcOJ+uDAzb5KVVknPoyTPJpjXAcwQRyEwSTqWNiIlQnMZzNiiKmDZyKRAPGOwqbyq6eJPxyLX4+fpTEOlKDKatgmbpgFMLNjIQeBmSkDYOJGplrE426Mi3QnehbeBZjJxNQ7sECEhB16YzhDc47AacYOMFaBinlhbCq/1crj6sTWrdrwm4WWzdz27xdnCxwvyw4/LMeyXMCaI26O3MI/JNW8+fCwnKWZwwh7nTK5Ti8hdDY60GqBs4fT8f7kdDlZTmQ6wmhpH/dCtfDJ7P5+0tibNXNjO8stvR/g9ME2lN/RsJ6pB+sKp7g1kRh4W/l5HGInXrfCTv66kUfmeG9Fle3KQZXnrRjzm05GfI3j9hxx/wIOsXrei+d8GO/7new8Pqu205tqvhO3b0e9fO7q+/LmXhnjc/ExjlrFRxeXf9tQflfDNeu+dTiWD8bJ3zBqlR/CFNchb9luuJjaPWkuSaaDmF7kyNslsKz57VTXndJishf9/kXyelo2HvrayRrZZ0S9bs478+PQfzXuZSKdrJK4/zq5ROTVWd4dvzkdJdkm8vvrN/94y1nX4ydE7yUkL7DXsjd2y7u4WfGT7ffFM7NPebq3dfC+M392fvilncWXaSZ8WKE9R5Hu5dj/F29/tlfLbU2zTs0PJ92df2bbOOhkaTGX+r6YvE7/pZHTF8i/tC/OXp5vb2b+HcXVYSGO/JqlozelnF6s+PHX/B7HK368i+2piTJuJxew9ofyBmiV7xFrfifgV6XuJf8SXr1s+4O9rTI0V/wqFMgbmfAKf7d0ySW+4fcivZRI+y9w0ipbZwNgM/nVrYoPx+TWMz2BqDdqPuRh0LJb/oS909WVXd2elvu6X76dHGPcuUK0Sat862I9fk+EGpPTQXohLMfN143J1I3u7gfTfoUoeXOgflcOGrNTGXGjvk8vNd8f8epJo27ZOh2p2Eh+R7V0NbJ1LZ+OSYdXZRUHXT/VqRSx37WBH6TnOybnh/j8134zYvrXvBOm8fCsbzwKeHM0LNNMxd7F416MEgvbGfYryl2+8gSWAwySnelO35qLipaumFRxLqiGi+74S//uq/6G8hsOi4UIrRfCDgCcIEGiCRBMubTSAUosQhA4J6SJAFAzK8EqYCnBJGxCbBSYjD1WBwOk5BKAgdUCAsgUcORUUigLeBP5bRXDutep+PV7xdYZC028aqLOIDUjT1LjI5gqTBRJoo6FBGY+qIgae6eEhMDmUZM0j8AW4FBy4AAfCObgBayeFEg0gf7+V/wPD9/1hVPH5ADvmEEQhnMEIWE1dvVBQAFq3kTgxQVyamJsTIGFnQKOGN6R/OBFgvA3t/Ct9KUBRD6QbK5+Wvf6KxbiaX2ACD6AvOfgghc45wVe2ZMEOArMNWQJNSJlqBCZr+/x5ojUgoj37H5Y73sfwk+6sanC/ZDvG8lvq1b+ciP3mGZfAgiLEQAREYgyMxsMgWt6AmGCIxVxTkgBcSBh9mSMIGRgIgj9zObhyX1DUcQTyybr90fD2rMLWju+UYhdkP2SA5E4XwMiZ4ZAIDA5kK+ZwYmwKljVCwkkOPbsA4w9E9WnXzUZMak6/uh3JvLbKuq6Wym2Pj9yUAGoNzBIEDjlOJsAwVgncN5EGCu8W4fzj8Mbaz/bsV6uHBc1aw4AGYLHT51u/gc3ah0q4khkc/PvZXG0stybsqy/+ONEFY61hDeoiOCwz85gYCiDTiEMPs3Si6lU2ZsS8kUBdz4HWGEKVgOE5Xf4CLuNrr/9tV57FDN2QmuHWSM0xjGe9YdxlBbPFpRcX6IqJsWwnw4LHeb0rig5fZFmn9B83h27tCtL382nw1FnONr667waDj5H8j/p4flTXuKZmDY3/7aKYVytPfhRnkX7wr4Oz9HJhpO8N68MjfmJzxV7d/3evHc3Wt1O+z7NOq9vHXZflQjtD7Puh4lleWvQLacySmef5+R/J/9MaJOXf1v12uNqIPSY8NaiVnIz7lxUHDvlUsYdX2F4KtsoPqH9MKLu6FOmycsdrhTbra0T6t5fvOnMi7uiZe1xdbc3PaiUyT3d+nnxjfL3qPQjbnHLpnkni1y1r6LD7fCf5dnQDnDzEe3Z9KZbVDNK+g7vOHneLUnbd3nVmV9Vy5Z1jvaSvTyrwPJ0+X1V1GVfruk9bvx2uZamhvo5NYjm2snQsz3bveXODLE7A7h5IVLh7F/tUqhVvrvsZjmsbV1DegEePmn/xlVRDA8XQo/C56hxeF5LK9knqdpbw6CX2jnIP5c7cdAYDtN4mBzGu5heOj6Pxbw7C9wuP2SdeRXzr8vOyx07j4OKnzC/r1ZF86vchJgfA1CSh4tdzpLy3i075duxDiiZVUucTMtkepfkC3nI5SGZE+7jA6cmLi1Py2aZLCepf1X25qd5ef+E82/r6nBVN1qIZyJ5RPoJSI3YmYFeWWfijWAC3RaBgiECgYkxwUP3QU49nHiwV35VNgZsCHiq/LbqPsV1twPxQvIIgFoTZIGB2Xrn0UBeVOAGpB41YCNlARsx1Il6gEhZPbNI76iwwMxPOP+OYj3HJTumx+SfV6Hg2RsHMROCCFNQJ1yaifdBPDuCERvVt1g5MDuQkFgIgMHInD1VfrXycvhup/yfToGiJjUDEvcLocnpf7d3FyrS5EAcwJGc4IRA3iMEBudsoOs1mpUnGEh2I2cN/z+Lrg0OpytveaTP/brOvtmvisEG/1F0rCpJOf38jvvv7FPJJ18/KVj029Ejx78RP7RSfn9rwviTFE3GNxZOwG9P8tDvNfw7kX7ca/rl8ftv7UqN3/1d++/E/aQRh6sx/u0oMf9Wv2VZtXJ6qfXPVGJ4SD/utf1LD6Ck3+itzP132n5BuVY8p7+Ze7+RY+m36XqUl5J/QZRtmWx6G0hSLIZ3z07AD1Diug+e9vhNyPKTA8ke6UV+/0SBZU62YdD7ZwSkDg/RGO6nbEu/Zdz9TEEl8VBjGg2C7keyHxvZZn7uFxq1vb0+0GgI9xPl+sbCWTQIul+gqh56xaTl3Mj9BmVbcGabO7tfABvl+cym534CKnEbTeF+AaQOU3I/WwiBBdfF8vlzvxAAUqaaPf+s+35kuzb6uR+x7pvuUvTx1xBCxUe95qB6/hlijwaVyTh0uJ+QWIZ+T052P9OZ+aKYehmP59/2eJcAPur3vNSY3M9SL8km314UUdzPwqecz6rlVNH9goBrr1te76x3v80rN2U7zLa5i/u9LSA4fB6jqSbK/UCid/pGQwa6X4AqD/h87Uh3P9PKA5xSLgY+9wsklbi2tWq5nwAkn2tOhjJu9wsAyHa7s+Se+wWA0OE6puJ+xgsSVeazaAn3CyBJHE1Dr/sFgmwyrS/jFfezjb1Xo2nP2f0CAaU81Jw8/4wrD3Ieq8XO/fYk24Lb2h9FcD9DsSRV355sdO4njYDM19X9zI0yxLFm97Ps2RNC7cWmo/ttv1g8CInG+Viyf/8MIVDqMjykGqP7mQ58qZzOUnI/W58Hscd1jWPy8cNS68dGmK7YcL939x1voW3Xz/0CQVGZj9X9DPEum1IXHJNl6ud+QlJVprOSY3K/7QsPkpD5rGTDmZH7CQASx7rbWKvmfu92PtVG8rnuLmNO2f22hYAgZYqGcL+392Rjn7q4nyWETQnBQ3U/63Ev8NZzKu5n4JNGkMt8VrP7mXpkqCptrDm5n2ndQVUcS3G/7RHQqNThueazGt3PsOVHUqY+dHj+WWoNqIo+dmxetrlfYANJNsuen/vtVzuyPafduFXQ/QIJktr6xDl5/lnaK6nE2qBaXje/bwCuDbR1KdBJNQAAAABJRU5ErkJggg==’ alt=’Merge PDF to JPG’ /><span>►</span></a>» allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»» title=»Merge PDF to JPG»>
youtube.com/embed/1zytpAa1Pug» srcdoc=»<style>*{padding:0;margin:0;overflow:hidden}html,body{height:100%}img,span{position:absolute;width:100%;top:0;bottom:0;margin:auto}span{height:1.5em;text-align:center;font:48px/1.5 sans-serif;color:white;text-shadow:0 0 0.5em black}</style><a href=https://www.youtube.com/embed/1zytpAa1Pug?autoplay=1><img src=’data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAAn4AAAFmBAMAAAABk4o4AAAAJFBMVEX///9AQEA1kssyMjLo+fpCi7FPT0/Cys7d3d10dXWYmJh5rMTb5mXtAAAwGUlEQVR4Aezat3EcYRBEYQood+qv2jwgbXoQUQC4CK5ODV2qadKiiICZkjH0GKfeC+GrXr1vdrgL6cuPGGPE7rbjfiqbD7+TkuoyzPD7UFk1gv25lUqzmOFnVlmaTezPTSn9itkLfl6S8lcEfmYPudHiLuzwK83vBn5mwq/VhfLLGr+Gn3J9GY3Y38dL9ud2ksr/flN4sb9Mfef4tTsp1RN+Hb98uvQBuX6Uiv35lVTXcYmfmZQ1wg+/ws/vRKkaL+HH/vBrJKVmMcINv84HEPwelPoTdvjlRr/u8HOThF9rf1l/7y7DDT8JP/a3rS6yeh+A8avFFHb4SQuOX7eTiywtJvx65z/fD79kf5z/tnr9nePXev74HCPsOP/lAr/e+S/88Cv82uc/O/YnJX4dv8zPI7YTfvhV6fNlbCf88JOq48f+lC0//IQf+9vm+6uOh47sr/3+PmxA/DalxSV+bg9Z3f3h5+8Pv+b7Z/wyF5358fyrRbzg53XyoEz+v/KT9GX+j7zzSJLdhsGwFrjAxL0DD/Di+l+gatIOZTj1xuECDupRv+qlg2be9l3A4QpP9UJfzkKzuyVVTSCcDf9FcXL66gcJYUgqePzSDdetgnv+qH8OP/5hIEf2Bqyfavcecu7/iMvPgYNGvY9fe7X4OWj+NzVe7jD6EMx0k/fYm/79Hz+Hzv+wpUgGcPIa/APfDfHb/hzs/g0TGJiywQ24yE9xiN+2fRh4/tfQYEAEmvKkaTBb8+8fbAPvHyTrAKKKaDvYAbB32Tsq67nX8Nne8a/t97/Fmn8xxCGDydhVRhCgatIqop3xwFzBb0Dqh7+eX7z7txyoYOJCgX/3+Rufx8v/zErGrmmaVYmapmYCkZ9f27Zf7n0ejx8APll2XdISiaxe1czu8Y96+51EPL/E4rbp1CFZNYzKq9bOLwm2/tkoME4yvndHkjRpY5lN1wCJfPyuQp5/RcztSnWKaEpPph+TpDqrAR8+aheL9lEs/3FFFfNJJ4bIJdXGOQba+X/Pg/mPrDvp1EXPJKqrmslVt7my+A00/1LueWnB61VSfcVwLt+9iuU/Awg6cbsvS2c1Myo4lh8sosUvCLwc3Od04Kom5/aZ6wfR6qe8HOznBviKs4tRun3r2YNg+y/ppPs99hO7LIlxlBGo999lHH65mMIXKpLzY79UasC1fTASPxN4rmLZslPJOk360RofFfP7OtjzP9jCd+CXnBAtgMkx/xq/QPWX6ewh3z5t35AtUbkxgzYLvoLz+KtQ/gPn2UPK7JbbWPoRM1VUxq9po/GrTroidFPEaeiT1ux6/las/JkKkr+7zWkpIBXzW9i/3yLd/87VABkht0Q2AQzH+Pfl8XEo/3WSZwK/Us6h0wyl/BYLO744jv9Q4UQ1JbEQNYZSEstpoJ2kf3NWo0Jp+bk52Ivy/F+y60I0jeIxpTvZbZR2/OzSlwCVPv6jPQg1f/Byarkkqum2Jpsmo69JeQBEOb848Yue33zCTws1smzmV1x+fv5oL9D6IbbpQ8b1vFdNgTpNMq6iMlNh+W9x/SCK/5BvfkWHXERXDZfoZKWbrDAluweuUbz78lkYfiY+0WTo8ryR1uX4+8TEnEuGKV9SxI/W/L6/fHBwHImfrJX56Ssmi8Q7m4l5mblv+L3kUv/V38bxX66d7v41nsx+NHz0prYNezNg/kKTfsDFT1/4di9U/C63DPI8usGHmwkOYp5L5pfW/Ij+d/zIOsxlSOTGYQi6+WuQUVoA78owBr549emve6Hid64jfha+KJi288A51GXSR1y6+7d9ESp+acNPeiWtwSXUDTJOOrf/6KpXKH7mv6Sqsu5nAIq/kEf8UjG/tv18L1T+vJzpTrPyxVQg45czx+w/lBye02svkv+oOmm2etU0cEw8O35S7j/j9yAOP8NFxDsBniVbnWzC1/yHstVX9eL65vLL0wf5ha3t/Q/Fr128ETFckb8pPNiV/ii/4wd5T8jxo+N/Iz/QLT6CibIAeALf+G0lH6F08+/lg5vt9+DBfyd+kbubt53Tb+ydzU8cSdbus9WpzjKr99F5FR68R+92js4omGKVo6k7YN8dklfvZyha6TarskAU0JsaNWqwV6CywPYKRAts1ndW/c/dOFGVRY1vZTkTY8p91U8l1VlZWQv/+ok4kfF1Pn6Vy+Aibz0fl99Y9dUuv7nOnqzgZxjxOhn6+viV5stLHjfw0sqbZy/UVJCl/+qX37XA78V0fmLidW88ZovvnV8+a3Ze+rH9ZmlyaeZk+VX/pfVGL3cuME0kFioh8Ffnv3G5m620wff5kN9SHMNs4r/eANMkBUdu1tuZ/Bxgvor6L/+8rRHK+q/037/Vqv8Od6r4mWuKBtw4t1+f/2bh2WjO6U2b+KqiGMtvo/aLPr6tksMUtVMP1dFfLMCAK+s60neGIR5dYWFI6cICQUSex/UiMxGIwWwM4BFEcHCGLBMIQUzghv5LJ72T1imdaTpp1bj8N9ejVJ6mk/6rye/gE/xI+RGIFIQQE0oxCCr37pgMVAQDGXLzysjBKegR+wJELMqboKLhH8FR4/ihZokA9C8qLT/GK2mEE99VnSRVeh297yTx0zhulyr916j+072fXwlhihZv/MeOlYAzEQZFaKywVJbPXgCgIEBgFBA8HGgIiZiMACRMDBONB8joDgdxzIjfUJP2S0dZ5J10YgQoHOnNf9J4qbymf5PfB5W3JGkJMvpP1cR/OzsveTa/vym/wrnoLSembLI4iqdGuj8BxnGBwhTE8Rp5MmIKGBgHiOIugIIAciiocBFZAThDZApXgBqV37iovNfr3IHycfEt42+D+m/tUBcvoIKfA0DKjw2JsCmYSQADiZiEI0o52xRhFE5EjBNEERUSP0MEDn74NcDwDD0r4IT1hAsSgWCGpuH78dd///d/f/q5+vewZHpcBaZp0/ir/Ha2bQU/8iN+wiQceZEtDByMZzAZjyBbnG2jEHLCBfQvyhderAOLGC+G2ZCYgsSo+cRCMDq8xKteDLg+v9oLo2sQ7KUakW9Z/x3q3k2Wp/JLIj9W/4EXrw57Hwj+0R4T5PSSiXB1ARPu6/VXe3vHkMWrnXALI4qu/KPefvj4LnwnMCQboT9OvWf2+HRnl+T51c5BL/wgnPUO9J5qVSyPCd3zsZP59tK5MWF8uAzozeOvlt8LM4tf9B/xlQabD+wftlhA3ccgZ7ubgMOGPky1LmHf6y2XkQMD3cuzJMkGi90keeUR6G6Fr18K0G497yYLjnZipfPKUbur36ABv7CrwdOhUe5AAeBE+7lcZl3Lf7p2WveOqKr/mFn49bcMv5LsnbzrLgzsSjJwVrqZeNNOBvG+t93H7946WY63ZH7YZqH+TutyI788Ozh5k1yIodetD8VVcmHDz95k19d+Odl1b5LdE5bX2WXxPtkUVKrx6qzmq92StCy/5cBxPX6h+VzB7/ko/p59C4fTJ074WXJu2/0LWJtnPvBrlfXfC2bG+wMnxUZ+wQBc4Nfa9Xx2sHMpbfWp7X7wYrq7Iu1k61IK+SHzZLu74PDmebH784wm9NTlHUt34L/1OL1ta9RtXfJTA9bzXyus3V+lCv8lH64/vHv3rvstG9vdFivhX2rDGdNKKxmQf7ggZfyFEOe7wqRfw4ACvwVv5WGyR+Cj75hW0hNBgMZo56skxGePBXL2UvhROhAj3y84quk/fU54OmanNVZ5VJus4oionv5bJ5na/1Lv8e2JYKrayU6i6n/LbiUdsPX8/YKVo5fslxe6F+S/f8AIMtz9SXGvHXPh6GiB4Qws9bfFhGJ/IgX9ywP2f1jw4mQ5I7STSzbOBtMafP9A6FlGxtByJmCu579Ul8fcmdZHI73puP7TAFzPf2ux+ewq/Nc77AV1v2EsZ94xu3/JmL5fYP/Dg/Cvp6Of7YjfJgMPM8dU+D9nDANm6r9g8EpKBv5PCxxgEzteSXzg5y2TOXthQX9aAL1+IGD/KBHU9Z8uj9F/4h3w0yAexzijJuOH+q/W1uO7XBU/TgoWkrPITzyRwqGHGdHR34MLJTBEEPPZZkHBQDDkEG5xDgB1XzAHXgT4f10QOnogQW1dKZFQkD37mxQSLExvXooIt3e8MajpP12af0dSgCW/6L+ouv47jGtXnZvKr0UiIPrlG6Y/BwcBbrkl1M48nW3+sMC2P8BN+XV/ygTwtNxiAhjU3bQmeI288mOctZKg/cTLYuKIoEAhZz/rN/04e8IBXIdfnqRP1sfjjHcBMgSQoPw2/uuFtYNMqOh/KQDQ6+C/P2uocFhOCZwe2+7F8gKHchi5O40fRH/M2BHRcsrMYEgIuiztRDz8HxeYzpKozFE7JUOGnmUDWelvB35polr1tdsv+WNtPN9R/F1fUn6qdGL8Y6mu/w4OB87y9Pjh2XMcyi/9IfBj77WSd8FYXb/Ycsvhmsra7k8M98fSfwIYNtTfBBD4ASF2MI6+lShik3hY8c/Sg+tu5gPZ70RlBVSf38xo29x/t63/lJ8nU83PgI5i/QfviJQfzn5ur5FNBqEIj8svBZNlgAlY9JaCMeS3OOJHOPoOxBAIlB+zP1tLknSXQGd/Y0dwzFw3fuSP78R85UrgSX5N6r9y7YezqPYfgnOUHzky/l8zJnrzYCUTdC/Ccx1URs7+yiHIZl4EpC08lfIzVPqPQnUHh5INIj8K0E9Oex+8cPjGeqdga/svefJUm313xu/fJ+u/8QKQmvxekavqP4j8SPk9bHkjhTbuiB4uLD/gEELORjnnC1Z+WG55CyeBE2Ci/9iN/Sf0wwKBxME4m3j4wuYkLFQ4eZYRQDDGoC6/VeU3tZW8PuVttlFDD8S/j+u/Zv7T3uf9l+TBs/0XzvMLKbzt7jJ4JfvhGw6lujvqdzCBXwFud85twbb788iU6j8p+TE9DHiLQoRd9J+z+SUJCYM2Mm8ZJEADfusT/itZzYI05Sj9t7R0u/ZfGpt/W9tM/Cn/MXcXRORRcswG7VZ3U+jZwtrA2SG/Xx6LsHSfkMhGcgFCkKj/Aj8e8vPt/gcR5hOhxchPullom78lKdr9bXEMT1SXn/477yx6rC+NnJY2r/9i5hki4BP+YzltfZDF95lna7gfzEiPWhkRI+o0o+dM71sf8HzniUeUjOIHk/Kjgn9ZvRS52vORn/F0Gjt894j5LDsRe7pHZGrxK2c431X9Fzpg8vQj/9V8/l0N3acXZKbh40clv2+Y0e7reNcLgbXSTQZw7WRBCCojj9LV5Fi78Vbz5IUFHGD+mZ8YedZP9zvJE9J2I5j8w9Xrq16/dcz0qK9jYw+I6rWfVZUPIPXD8lKJMC71VaVN/afhIztGhRZ7jqO7ti2cbHST1i4xQO509VjIbu0SDIIY9n2eDSy/29IGiQxjCl9dgmixZ1jk4R4AeddNkj3PeN5zhqA9OiKhumSy4YfJnkPz/r+7sODSaKVlGo5G9V8e+VU3+/m5UCzh4hJEjClIlB9ZJwAXnh0hipkdGxEzHv8gQ4XSl+csDm1lMxz/YIiciGhE8iyWXr+0ABcFCYGpLj/tANQl0k+XPiVd2hveK75a0tJ70//c2H9h6f4rQoVMOX9ILLggYYGyISfCxCzCYKgMBGKcA1w5vk6WSAwMiVUzCgCCQA/jxcJoN0QB0PePGY6FAdNo/C1uzRmD8EdHVX/g+sev4UCljn9sdcr40bD919rp7e9KJT+240kFbGCAES9nyMV3gSp+CxaCgykpMDkU7MCW2ZpYJxKMU8he9KZnmbApRHtRHUCANCm/dzj+9qsuEEmb979Efjv71UtXueRlBCAaz4DxrAwF5QUeWqtwei4wE79Xsgw2XF4SgBhgpkfpiQiHtgvHKw39lwSAvyrBzx//7XUCv9s9/2rihW1GlRyipPxAoHgWT1w4HEFljB4EMJyDTMAnqFEjtpvfmsiv3d87EbsT4o5ChgE14ZenaecuFJcGa/S/VftPN36+rOZHIzwwSoYMyuLM0HMimgQ8hMgo73IGDo5IRiT1AgROIn7IacSwOwxJkIb+S++K4BDeiGCj9l+eHITRt+NKfnRzwg4MjEAQDDFuxFDRxB9u7jbxF+VFcghyDFiyV/vJ6p5nhdzYf0mefJYCuMl5u+mt4q/mnV4lwjxEEBJhkYI/a/5pns48JtdHp+Nj+v+JtFn9p/zC4BvmomHJFmYpcFt+dVKdRFppxXU9xgibx1/ld/iS3XwAGgDEhnArfvU3d60xzTfPh/Zs2v7TvIPbPCf/BRlCc371GdYmnJcTehvVf8pvjnkvBUOR+VryhzZ9/o2DvxeMuYpRj191UsHyNc4+lk+81XDrxE3N/NcJU9dWB/gtaNZSy8kLs1ci5eXro1ZLWXwb9v/p1Psn3jHmJHaAgaE7338j/ei8rtJG8VfTdh++FFSrHNIRb4B4RjfLjcTM039pGl1T3SKMKiNDbTWo/8q5L9UYvARxQXpG4PLBlQgAs8Fc+E3y0Gevj6QrPyYLbJo3elpp4r9y7guqJBABCZjISJSBY7KiIp4Xv7EBdfVGWUI7ST5OL5iEv06+1sn39fE20Vcd6Y1N2n8692D/ZAaGxa08OdjzbAlXnTDR/AMxHONZLB+v/Fz5RVDlCppwTK6XGV/KA76xR+/ef8F+h35G3p52friWJLvekunHsrDnBYSj1n5nLXlFc46/ut/c6up4774JdSbU6zXYvqRZ/ZfuhMEPAlX7L3/7NozsnLNIf/ft2+tuesnMdPTybdCJYL7xo9P78dfp+se/Px33rP7jHzq4UVcN4m+ZNgWMKm20PMlid1dHfM9F5Hl31RvQ0TaLEIHmyC9Pda+5Wvr3bu1WTN6k/afNl/1tmYGhnXpn5Chj5v42O5FnyQVLWA7HgCHj5um/Mb6lGdIBOp2bW0Np4/ovDQ8f+xeYocXUe6aHicdwLrPn7gPxcvR3DhLwHPlpbrKgT+dHqctPlTd6/o1Zfwef4gdaKfnByZuMvC7HhGE4zItfGu1XYwblkoKoya+p/3Tfkuqx87L8eqJ2v/QfaCP1kR8BjudZ/3X+d63UeA35pU36/5TfE/qE/wA8yomG/JjayYCUH8QBbn788pCfouQzVDXBf/9C8Xctdj5/il8hz1ojfmCY5Fz5sSk87lVTfFIuVItaquRY03/Nxz9WddviT/Lzoc5j5WcBMOe6auZvwkI8l/ZLudPwms6frJUW5UvVf6lOXTufzW/Y/nspgd+mYRgrkd/jt0GOzdzih66fKWup2Yr80jrPh53Hf1fLbU9n8ztNXrDyswxndU6pP8qSoG3hOdZ/j9eD9N9ZVoKfGz/Sm/ihec/K9ZczZz5vvXKz+fXD+FKy5wGfv7AsXv1n5SgLk6Y72+znx6/zeKli+VsZPm9TfvNy/z89ov9mb9u5tYuZWkm2kuTgWJTfJjOT4SRwPNp0+sG6ufX/5Z3/pZkS7rz9MrH/5Hj9+ex9N2YyaIf+g4LEDP0HiLHJefDfTxLEc33+fVw13X5pCr+8vgEn9w+b7b+wa9jaJfvZ8ZcEgAFI+Tl2of1nOEyHLuAM5vn8ofymElyaEj8a9j+v19n/L858HtjZzx8JlJIA1I/86FHiIWEhm16bG780HKtDfut3Wn7zcfnVt9n+a4Wpa0+8oZn+SwQOcCauJQIgpxnpdHzAmDk+v5WpuSej7qgNrUj173Paf+t12n9rh+W66Vn8GAAz4Eft518es+Ojb0n0spnn8+/TESidBa5HUGx1DJnduv6r7b+1g8P9XfF2dvkVDCWRH9n+T+I5+I8Jhngu/PJROyMYsAQ1XMofCJb4mvtvvH9Yzfov1XWr5wDP9h88gqwN/EQE77OBobgciXG/mpLf8svVfzXib3qg66bxqfIrkZ9h6V6yFFf5LrHWfwzMlV9MlDBs4856AG7ef1Xbfy1d9+vheHb5JajYUj/TgaxswEN+DNWc+5/VIkvTTXfb+FE7/q4Ffrv+U/7reIOhuklQ71gMCK//wuKgml/9l8RURU+rFlT+P/7L6xqwVvzNw7rBta0XBMYs2WuCygi9e3sdulzEEBE2LkBz9l+epDPXz6yv36r85nX9F8c+LgizRUXJ10OIRAAhwHp4mi+/Ya6if6/Et3Tb9l9er/7TvnvtvDI0k59YqBhO3+AcGziIzJdfudVXUK9CGp0b+y9NasffVsD3BAUcZsnxiC85ZwwYIIYzMOTmXH5Hc4Q6UxcsJGka8m+Vajp+FEL6+th/efXTx9Yuo6kM5qWpaxeGOxQPX6qOKldnjvjpu47/1trnvWyXx+g9039pchBnrqGxHOakiuKmCIev4dmIq/IbAwz88gaJW0ePNDPz98Rl0+eN+ZEeKpo/v6h/moM6LL76KS/5qTSNaiQ7Il0t3Vl7dekmDfXTan6h737VM347SprNYv5xkt//6aSR9GxpHTCROHNd8zdWODdd07EP+v+Un+rH0kTaJ1NrApsaOY/5G9dLfkuV+UPXymXntxTPnV8+M49g8N9kAN5SH9WYxpvu61P1hHHz6oxlq5dcgxP9Nv2X/7j+dLIC7ORjdvlHWZAm1QnFd/wMGPlNJ572Dg+yAfsaNuPfIr880fzTJYdQgLfScYK8qiwh3nYJvp3EvrTVqR56e+XrmctwZCi/KX6av7tsBIdDN9gIcNLZR8xeO/Hcor6dse6D6sUPtuY3F3+TNNNm3EQm/XppGn4MjefJX21V7npwsH/JdcsmCwDz9fHLZ3ajLK3f7ACzVHuL/InosaQPLlV9zzuHx4yasu4uHjzMXfPLqxPCJeEBZKkcGxl6qZ5KdrPT12rGigOq+RTh+NEu7kAm6MuV37wsuOPdnfQ5YqINWAuf3l8j/Cq/Xam58tvzD9kdPbG5u+SXVvhQP8bnsAkjrUeG6584FN+460+Rb+VJOr31p1sWg1FPup/454v57uNHBcIhv/WJ/fFrSJGViS+HA8tV4UP5HVxQXUv55QVhR/hMEfGd8qsxjjY5HlJXpVl19t9U+6Vxy84nHjXEjpn9n9R/BjKKAgxVARoyFUNgAllCARAzQPqnLyp3JPIMuz8wcHAEuC/ML0/zfDQ+PJ5dWVvr5d1hT8rqZUe7VPc5l/xyxuygB9OoJBLA3o0rNaPXmIhNPIdTiiwGJCQEkHHG5sdCbAiG6cv3H6T5526Qr3tSVrX+dg4vGTUkxrF3DzMBMOEcYwkETyVjJjh548gQQeGyAREcsRqVDEDQmYMGTgoA+kdfll+5P+V6OcuoubT6q+w7HTDqiESIdO9/diQsYkhBCpPYcvMwFgcSSJCL7wgivQXwhhjCYglik4GwKx35pfsPkvJRdj2+3TYnUl6xZ84rb1FDXszbE9KUFSB5fv3WCwy8FO/eenL01gOg5x6mfSzPdT2rPP9wwuz0d+EWMZ7tSfjGhTPz/PCkKMTJ23cnhOYEm+LT4eEYCYJuUXgDv54m5argt0umFr/FrTTdXc54uHtssuqZOCbLejVg2zsHQL1z5uWXIbVWdqn3HByzYwkf8wNvCa839dol+9dZkieZl439pLX3xf0XC3A5hnQL963rw29emS+qZvUH/JIe5Nn7jEGL/fDDZJcg5irpdZOXYvvbo02yeTm7au30F+zOWriFHdtu2gtnwnT2163WYbIg8no16aSZt2et3v7Bly+/ZYYp9VJThGpaLb7V/A4G7FFDmizLdvNMjLxpXYp5k7nCt/Nt4tMFx5pTC9S9sLKcdV/Is+x09YLPFoTsSr4teL3gQa+z1oWcZgNiu38swX79S2lfA+YLl98kjTO0JrZ4bmq/TsWsGV10/sqjjgHpYeaZNvoLZGwgKbLY3bb+WUaW2tdEwXkGrAuTHiavhNr9ZFv8cssbPloglnZywXSUbouY7qYFJwMSPGwRC/gL13+TM7SaJOJSxbOn0X759JG3iUX7M2XoTeDg7S8ZmXb3kgtnz3atXkRBgPJz+m5C+b0U2G6g7drpwEj3pRjXDt/T0YK3jkb8oKmTpBAA98Avn0ixV8ZhPWpIa79Op2LPiINQ/dla8YOUg9d/Mx6teYDo9RMWzf5mPUf/oeTn2cjZd4JCkmPm/EKE5Owv0KWGBnT2wprAzxl62BLr7oVfHmvAcfl9Wns397H9tA6YOu3+wLFBLX4vGMYHfoEhgYj+kEGGK9Edjf1nJeRGYhuzhDAl52xbAyMsZ984OvorQ9OcsfKDoZXkUtjdB78Ygn99OkGnpp4O7VcxcrR2EFp/XMt+RtnA+h8iPwYj1G6Q/ELpS+QHM/IfPEb88gssJnu9q+u97jfxmlEXMksyINJCfiJyL/w0q3RvXILXm2Rz1O7+ymnjq1vbLI7xaSk/0ryB+iejR2HJY9cXKz8AN/zk7FsYkv4FP0rWEnX/3yjwIwD/8x2DkgGTkY289YHkXvyXagjRcZD6WirTieZafPWYkuz84EJAqKFY70O9FzzIDhSqL+ZE+ZH5Z37swcFrHD5fYEX919vbOycaTjWPC/6TYxDIvstXL+/h+TeqE0JImYyxtnQ/98pd21o7umcEoU4dZJSfAT3LRPmBjYTyq/y4TI9CJT9xll5/a0n50Upr4ISFiFwsvxzyzxMlx4a9kdAEfHJP9V+edDprPw4n8y7VMZ/O/NPY0YnGq2i9dOvO+2Pq/p2ZKLCLMQTQFFDc3SQQGwrRhUYLu5YX4BGzBEPrv+exqSJM8EfflvlXODkmQwyWR/nAsrsP/yUdzbNcZ5eYEuEwHXpnxqLBw9oPbyBNbTKKvy2BhFCywIGfFUAcupssRsMxLy8Q2VD/sTPqP04uCohxUh5MhFJsNX4wG8cg2z23ci/xN84IGs8zX9djiv7p4q89newxa8259l1RPX5nD4R1/wiiR8mAHcvZY47J7pw40tLtqJ1vcsxJa+gssuqfIyautY4lxl+NH99YBKgWEKaCAz++D35aChXgau1EDUpPY0eaTFcYeAt9V1wLHpycZt7QSnfBIzx/iBMbzKbPHyT2mimmP36Tb1pSflYiK40fcrYgVlHRmB+D+xciYojI9s8Z5j74DbfyjPPM6yncOWtcvhMf3lBX8ig9h/0lySggyQbCp60B/EZyKTg9gH+TDXjjMAn8tHV9U35ZnqWXIlY7+mL81XfDmr8ap5deHqXHDL4XfsPJ5IFgwDjrSPP4SvXGaoCa7aO3es4OjBpywXXZh53sKhMjG0l2fZXssve2m1338pculOlXV92X+YvAK/Owo/Kbn4Pa3daH650Av+T3HRv5Jdvb80fZ3nXwMwP3wS8fF2FlGLU/7Rgq1bc8Ip+x5rdm8VUZeab7lKwcCMi+D6erAxDktB/OzonsVfjvxc5FuO0VnMHpTwxDW+dwfJrr3cfkfvgJQd//3SKYMs3oWfht61Jg7oXfWOnMXA2TAWfmpseHOu2UQHX5kbzr7fqVXRYn9rq3dyzOOpLTXm8gVNDiVe9crgYWK7tCwEZ8Hr4akP7uvWYGJTzbZICXN414vu5dimz0eh9I77svfqken9LkXuXV97eG866MQU0VxCRwBID0VE+ME4EwPJM4YUIZzQl0A55JmMG4ueYEEEsEIsG9lN+qCR6Tr0lok3dWzxs6ZlBtfo4Vn0ziYRAzA57BLMaBzc0wZnmGiGjIj2l4xkxkQCxg0h3V3+rpMtW08xnbZe/vkUVtCQwMILiR4XjdMWDAMHAjZnDDU1JShvARIQYBHsPL9+m/MqdAJFODcTXmzsGOFl/AoaaY470ON5u2O0Y8oYhgaj3GIHY88ZFHwIjAzgD3039VvSV+Pj6mE0yng14LPc+rA0J9ORDPnhZNMyaqMTNAkV0J8N7Wf1RVggrtdhlYNNnC6vDhg1BTZG43m8+AMem/ceVpAJoDv9GqzAa0KkeOBE1kQKWV+IYHjIEginjaghouyTPzHS0quZ3j6t840X7Jp88OXtOuP334aCT3ERt2ZQ4LnsD2sakZN7jH56wHk7m9/+aq4L6tBW/w21Qyb6U68LYr7nd+t5JOGzrIThi/87uddOBowf/O77bqHe5orp7f+d1KeSfk+li7ZNDv/G7Z+DvYP/DsfvffraNvva6/3/lVbBfWOzjnBgCZAAa8Ycho3QexjReJmOKJXmECgR2TA8gTyDu95jjeOXwzDOPseBkxeyJQ/GDZAQbkYQj2q+WXaqYtffZlapKfFyRgZgOAuYAzkQhcQZaoXIBo4AwJyAt58maIBgx2YFF4YEVOxtKQqAMUIMgwWyFDpNwZTr5Wfjrwpnn2FQrqy8E4gmGOFhmydwCRwMHCABZOwC4Cc3DMTsg5gJWqwLHeFNm4AgyAmAAIUSRoLVy86hTwV1x+1w4b75dDYICMJ2sFZMgDzI7EgQpiMkxlrnMmzyzsSSy4EEdBIDHl8zIBzETMbFEYZlAB78AEZiGKXxpxRr5efoc7YdzcNdoOgr0RK1LAGBTKCGxF2Kh2HAMFe5jCG2LPzrGHOOgPCM4TQJ4RDoXC5AyBjWEnEFcAZD30K2PjvYadsWKJ8H+pOw/eNLamjyeKZcdWu6O5OsR8CkZ/NLCr8pRcuX2KezTRIbaa0UYcWJWn+JXXtlrQWhBbLYiIjfmUL6vb+8VvefDQO/w0Z8t//szZUH7/VRRFPXzXCccB98tS4ByYQANyvbF58uxJmNmLMcOJ+uDAzb5KVVknPoyTPJpjXAcwQRyEwSTqWNiIlQnMZzNiiKmDZyKRAPGOwqbyq6eJPxyLX4+fpTEOlKDKatgmbpgFMLNjIQeBmSkDYOJGplrE426Mi3QnehbeBZjJxNQ7sECEhB16YzhDc47AacYOMFaBinlhbCq/1crj6sTWrdrwm4WWzdz27xdnCxwvyw4/LMeyXMCaI26O3MI/JNW8+fCwnKWZwwh7nTK5Ti8hdDY60GqBs4fT8f7kdDlZTmQ6wmhpH/dCtfDJ7P5+0tibNXNjO8stvR/g9ME2lN/RsJ6pB+sKp7g1kRh4W/l5HGInXrfCTv66kUfmeG9Fle3KQZXnrRjzm05GfI3j9hxx/wIOsXrei+d8GO/7new8Pqu205tqvhO3b0e9fO7q+/LmXhnjc/ExjlrFRxeXf9tQflfDNeu+dTiWD8bJ3zBqlR/CFNchb9luuJjaPWkuSaaDmF7kyNslsKz57VTXndJishf9/kXyelo2HvrayRrZZ0S9bs478+PQfzXuZSKdrJK4/zq5ROTVWd4dvzkdJdkm8vvrN/94y1nX4ydE7yUkL7DXsjd2y7u4WfGT7ffFM7NPebq3dfC+M392fvilncWXaSZ8WKE9R5Hu5dj/F29/tlfLbU2zTs0PJ92df2bbOOhkaTGX+r6YvE7/pZHTF8i/tC/OXp5vb2b+HcXVYSGO/JqlozelnF6s+PHX/B7HK368i+2piTJuJxew9ofyBmiV7xFrfifgV6XuJf8SXr1s+4O9rTI0V/wqFMgbmfAKf7d0ySW+4fcivZRI+y9w0ipbZwNgM/nVrYoPx+TWMz2BqDdqPuRh0LJb/oS909WVXd2elvu6X76dHGPcuUK0Sat862I9fk+EGpPTQXohLMfN143J1I3u7gfTfoUoeXOgflcOGrNTGXGjvk8vNd8f8epJo27ZOh2p2Eh+R7V0NbJ1LZ+OSYdXZRUHXT/VqRSx37WBH6TnOybnh/j8134zYvrXvBOm8fCsbzwKeHM0LNNMxd7F416MEgvbGfYryl2+8gSWAwySnelO35qLipaumFRxLqiGi+74S//uq/6G8hsOi4UIrRfCDgCcIEGiCRBMubTSAUosQhA4J6SJAFAzK8EqYCnBJGxCbBSYjD1WBwOk5BKAgdUCAsgUcORUUigLeBP5bRXDutep+PV7xdYZC028aqLOIDUjT1LjI5gqTBRJoo6FBGY+qIgae6eEhMDmUZM0j8AW4FBy4AAfCObgBayeFEg0gf7+V/wPD9/1hVPH5ADvmEEQhnMEIWE1dvVBQAFq3kTgxQVyamJsTIGFnQKOGN6R/OBFgvA3t/Ct9KUBRD6QbK5+Wvf6KxbiaX2ACD6AvOfgghc45wVe2ZMEOArMNWQJNSJlqBCZr+/x5ojUgoj37H5Y73sfwk+6sanC/ZDvG8lvq1b+ciP3mGZfAgiLEQAREYgyMxsMgWt6AmGCIxVxTkgBcSBh9mSMIGRgIgj9zObhyX1DUcQTyybr90fD2rMLWju+UYhdkP2SA5E4XwMiZ4ZAIDA5kK+ZwYmwKljVCwkkOPbsA4w9E9WnXzUZMak6/uh3JvLbKuq6Wym2Pj9yUAGoNzBIEDjlOJsAwVgncN5EGCu8W4fzj8Mbaz/bsV6uHBc1aw4AGYLHT51u/gc3ah0q4khkc/PvZXG0stybsqy/+ONEFY61hDeoiOCwz85gYCiDTiEMPs3Si6lU2ZsS8kUBdz4HWGEKVgOE5Xf4CLuNrr/9tV57FDN2QmuHWSM0xjGe9YdxlBbPFpRcX6IqJsWwnw4LHeb0rig5fZFmn9B83h27tCtL382nw1FnONr667waDj5H8j/p4flTXuKZmDY3/7aKYVytPfhRnkX7wr4Oz9HJhpO8N68MjfmJzxV7d/3evHc3Wt1O+z7NOq9vHXZflQjtD7Puh4lleWvQLacySmef5+R/J/9MaJOXf1v12uNqIPSY8NaiVnIz7lxUHDvlUsYdX2F4KtsoPqH9MKLu6FOmycsdrhTbra0T6t5fvOnMi7uiZe1xdbc3PaiUyT3d+nnxjfL3qPQjbnHLpnkni1y1r6LD7fCf5dnQDnDzEe3Z9KZbVDNK+g7vOHneLUnbd3nVmV9Vy5Z1jvaSvTyrwPJ0+X1V1GVfruk9bvx2uZamhvo5NYjm2snQsz3bveXODLE7A7h5IVLh7F/tUqhVvrvsZjmsbV1DegEePmn/xlVRDA8XQo/C56hxeF5LK9knqdpbw6CX2jnIP5c7cdAYDtN4mBzGu5heOj6Pxbw7C9wuP2SdeRXzr8vOyx07j4OKnzC/r1ZF86vchJgfA1CSh4tdzpLy3i075duxDiiZVUucTMtkepfkC3nI5SGZE+7jA6cmLi1Py2aZLCepf1X25qd5ef+E82/r6nBVN1qIZyJ5RPoJSI3YmYFeWWfijWAC3RaBgiECgYkxwUP3QU49nHiwV35VNgZsCHiq/LbqPsV1twPxQvIIgFoTZIGB2Xrn0UBeVOAGpB41YCNlARsx1Il6gEhZPbNI76iwwMxPOP+OYj3HJTumx+SfV6Hg2RsHMROCCFNQJ1yaifdBPDuCERvVt1g5MDuQkFgIgMHInD1VfrXycvhup/yfToGiJjUDEvcLocnpf7d3FyrS5EAcwJGc4IRA3iMEBudsoOs1mpUnGEh2I2cN/z+Lrg0OpytveaTP/brOvtmvisEG/1F0rCpJOf38jvvv7FPJJ18/KVj029Ejx78RP7RSfn9rwviTFE3GNxZOwG9P8tDvNfw7kX7ca/rl8ftv7UqN3/1d++/E/aQRh6sx/u0oMf9Wv2VZtXJ6qfXPVGJ4SD/utf1LD6Ck3+itzP132n5BuVY8p7+Ze7+RY+m36XqUl5J/QZRtmWx6G0hSLIZ3z07AD1Diug+e9vhNyPKTA8ke6UV+/0SBZU62YdD7ZwSkDg/RGO6nbEu/Zdz9TEEl8VBjGg2C7keyHxvZZn7uFxq1vb0+0GgI9xPl+sbCWTQIul+gqh56xaTl3Mj9BmVbcGabO7tfABvl+cym534CKnEbTeF+AaQOU3I/WwiBBdfF8vlzvxAAUqaaPf+s+35kuzb6uR+x7pvuUvTx1xBCxUe95qB6/hlijwaVyTh0uJ+QWIZ+T052P9OZ+aKYehmP59/2eJcAPur3vNSY3M9SL8km314UUdzPwqecz6rlVNH9goBrr1te76x3v80rN2U7zLa5i/u9LSA4fB6jqSbK/UCid/pGQwa6X4AqD/h87Uh3P9PKA5xSLgY+9wsklbi2tWq5nwAkn2tOhjJu9wsAyHa7s+Se+wWA0OE6puJ+xgsSVeazaAn3CyBJHE1Dr/sFgmwyrS/jFfezjb1Xo2nP2f0CAaU81Jw8/4wrD3Ieq8XO/fYk24Lb2h9FcD9DsSRV355sdO4njYDM19X9zI0yxLFm97Ps2RNC7cWmo/ttv1g8CInG+Viyf/8MIVDqMjykGqP7mQ58qZzOUnI/W58Hscd1jWPy8cNS68dGmK7YcL939x1voW3Xz/0CQVGZj9X9DPEum1IXHJNl6ud+QlJVprOSY3K/7QsPkpD5rGTDmZH7CQASx7rbWKvmfu92PtVG8rnuLmNO2f22hYAgZYqGcL+392Rjn7q4nyWETQnBQ3U/63Ev8NZzKu5n4JNGkMt8VrP7mXpkqCptrDm5n2ndQVUcS3G/7RHQqNThueazGt3PsOVHUqY+dHj+WWoNqIo+dmxetrlfYANJNsuen/vtVzuyPafduFXQ/QIJktr6xDl5/lnaK6nE2qBaXje/bwCuDbR1KdBJNQAAAABJRU5ErkJggg==’ alt=’Merge PDF to JPG’ /><span>►</span></a>» allow=»accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture» allowfullscreen=»» title=»Merge PDF to JPG»>  org/Question»>
org/Question»>
 Все файлы обрабатываются на наших серверах. Для вас не требуется установка плагинов или программного обеспечения.
Все файлы обрабатываются на наших серверах. Для вас не требуется установка плагинов или программного обеспечения. Затем перейдите в «Файл» > «Сохранить как».
Затем перейдите в «Файл» > «Сохранить как». Вы также можете изменить качество своих файлов JPEG, отрегулировав значение рядом с параметром «Качество».
Вы также можете изменить качество своих файлов JPEG, отрегулировав значение рядом с параметром «Качество».
 Например, статью о мультипликаторах прочитали 300 тысяч человек. Разбор о том, как работает Московская биржа, — полмиллиона. Таких чисел нет ни у одного журнала про инвестиции в России.
Например, статью о мультипликаторах прочитали 300 тысяч человек. Разбор о том, как работает Московская биржа, — полмиллиона. Таких чисел нет ни у одного журнала про инвестиции в России. А если не получится — пройдите курс, после него точно все удастся.
А если не получится — пройдите курс, после него точно все удастся.
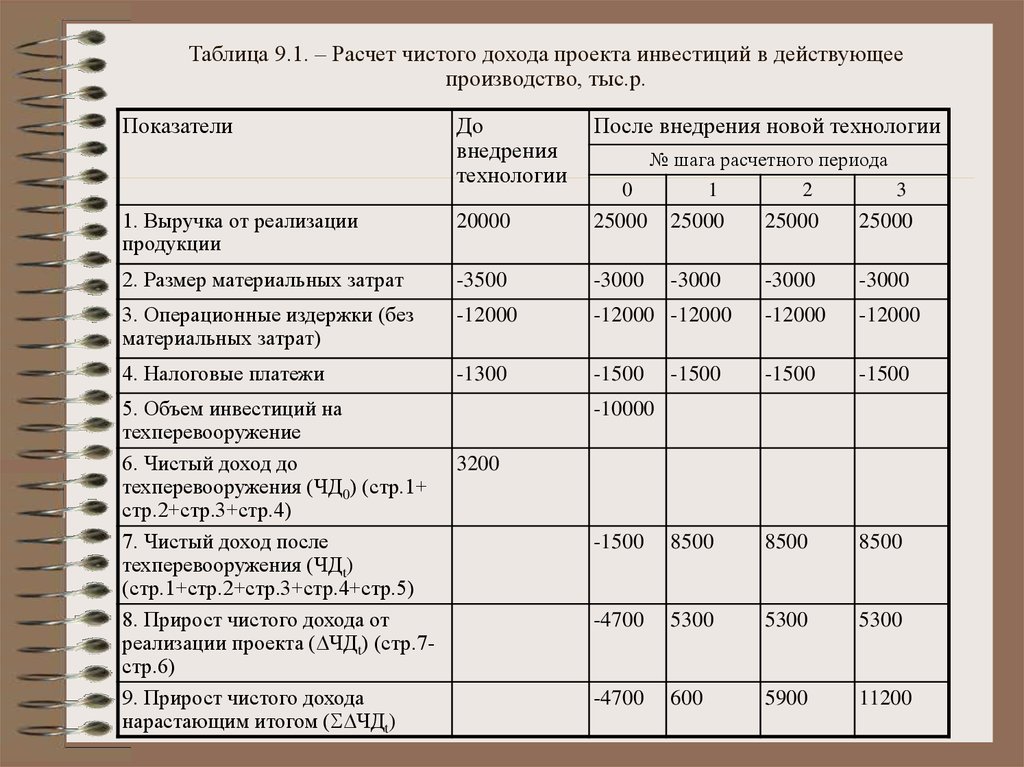
 org/Question»>
org/Question»> Успешная реализация сформулированной цели достигается посредством решения комплекса задач инвестиционной деятельности, суть и краткое содержание которых можно охарактеризовать следующим образом.
Успешная реализация сформулированной цели достигается посредством решения комплекса задач инвестиционной деятельности, суть и краткое содержание которых можно охарактеризовать следующим образом.
 Минимизация уровня инвестиционного риска может быть достигнута на основе диверсификации инвестиционных проектов и путем страхования этих рисков.
Минимизация уровня инвестиционного риска может быть достигнута на основе диверсификации инвестиционных проектов и путем страхования этих рисков. Речь идет именно об оптимизации ликвидности, так как ее максимизация может привести к снижению эффективности инвестиционной деятельности, а минимизация – к сокращению возможностей инвестиционного маневра и даже к потере платежеспособности при нарушении финансового равновесия в процессе инвестирования.
Речь идет именно об оптимизации ликвидности, так как ее максимизация может привести к снижению эффективности инвестиционной деятельности, а минимизация – к сокращению возможностей инвестиционного маневра и даже к потере платежеспособности при нарушении финансового равновесия в процессе инвестирования.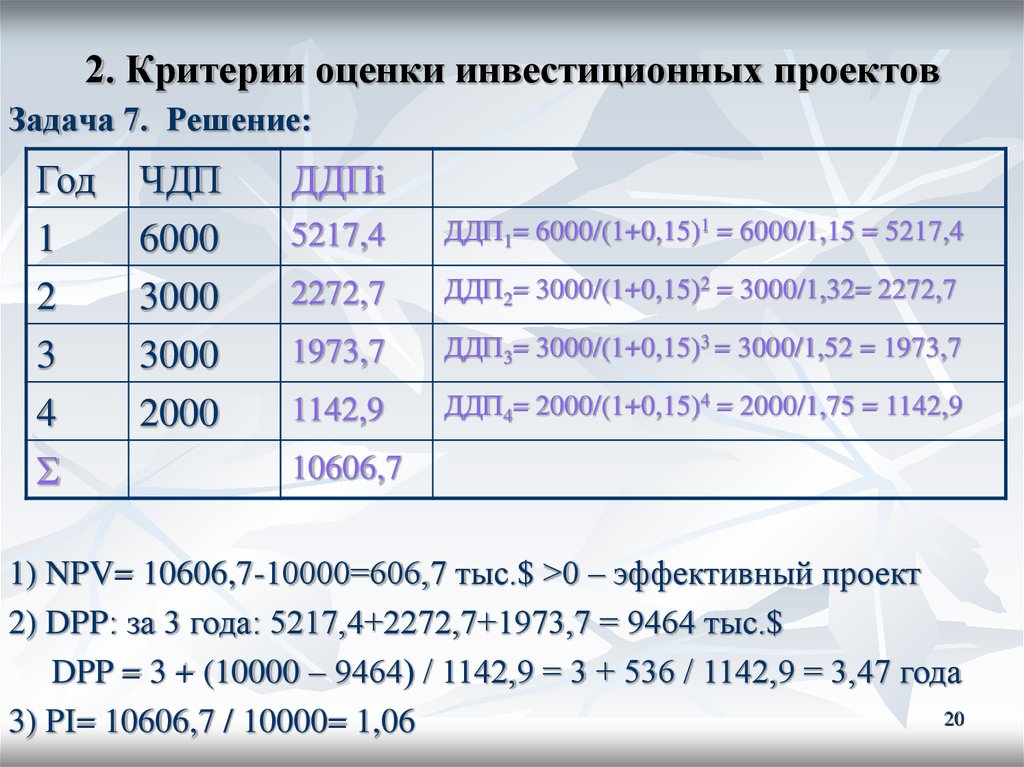 Связано это с тем, что процесс инвестирования осуществляется со значительным отвлечением финансовых средств и, как правило, на длительный период. Все это вызывает необходимость прогнозировать меру воздействия инвестиционной деятельности на уровень финансовой устойчивости и платежеспособности предприятия.
Связано это с тем, что процесс инвестирования осуществляется со значительным отвлечением финансовых средств и, как правило, на длительный период. Все это вызывает необходимость прогнозировать меру воздействия инвестиционной деятельности на уровень финансовой устойчивости и платежеспособности предприятия.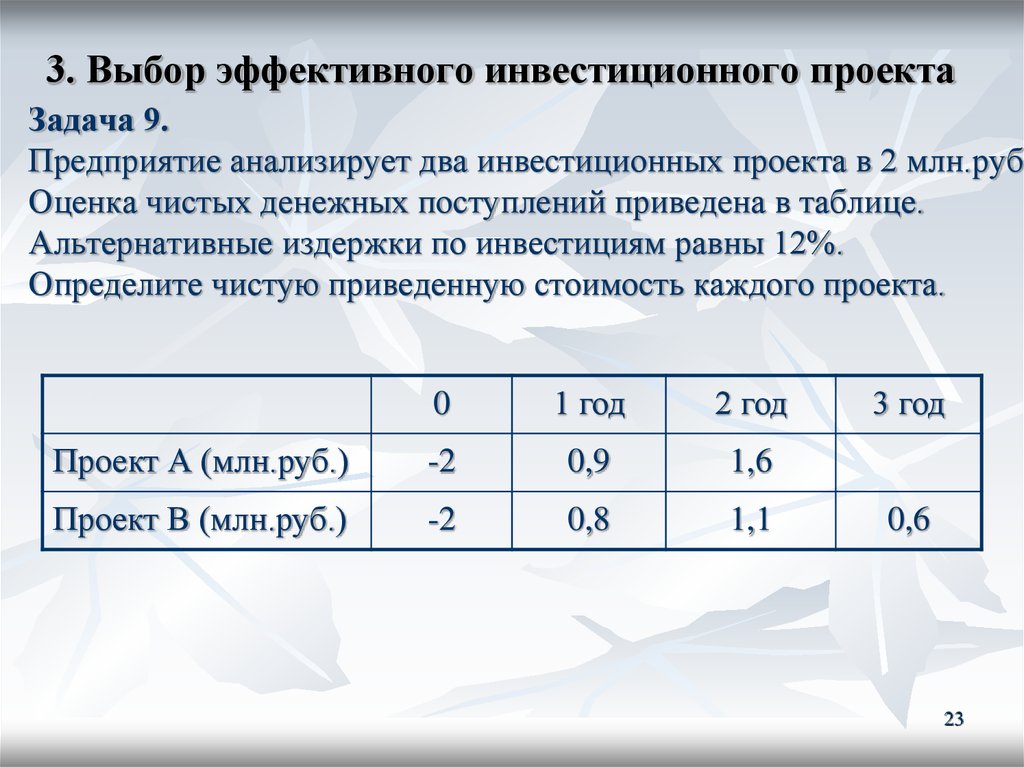 Поговорка о том, что «вы должны тратить деньги, чтобы делать деньги», часто верна, но только в том случае, если вы предусмотрели потенциальную рентабельность ваших инвестиций. Независимо от того, внедряете ли вы новое программное обеспечение для бизнеса или активно инвестируете в маркетинговую кампанию, конечная цель — заработать больше денег. Понимание того, как рассчитать рентабельность инвестиций, может помочь вам понять, какие инвестиции окупаются, а какие расходы следует просто сократить.
Поговорка о том, что «вы должны тратить деньги, чтобы делать деньги», часто верна, но только в том случае, если вы предусмотрели потенциальную рентабельность ваших инвестиций. Независимо от того, внедряете ли вы новое программное обеспечение для бизнеса или активно инвестируете в маркетинговую кампанию, конечная цель — заработать больше денег. Понимание того, как рассчитать рентабельность инвестиций, может помочь вам понять, какие инвестиции окупаются, а какие расходы следует просто сократить.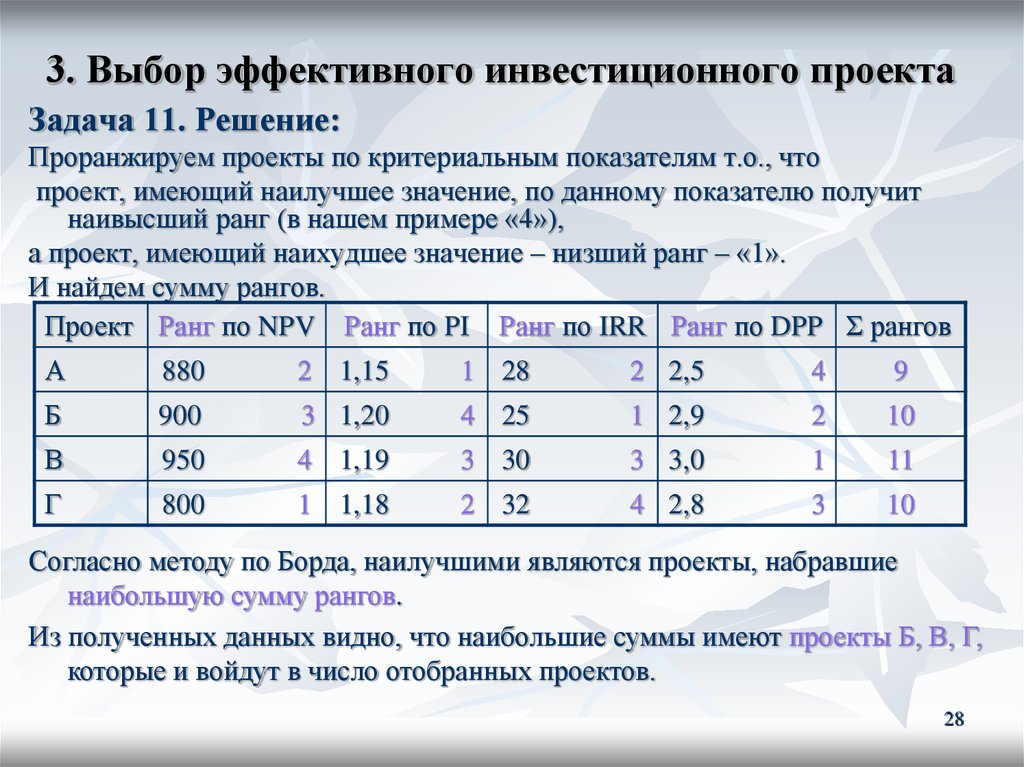
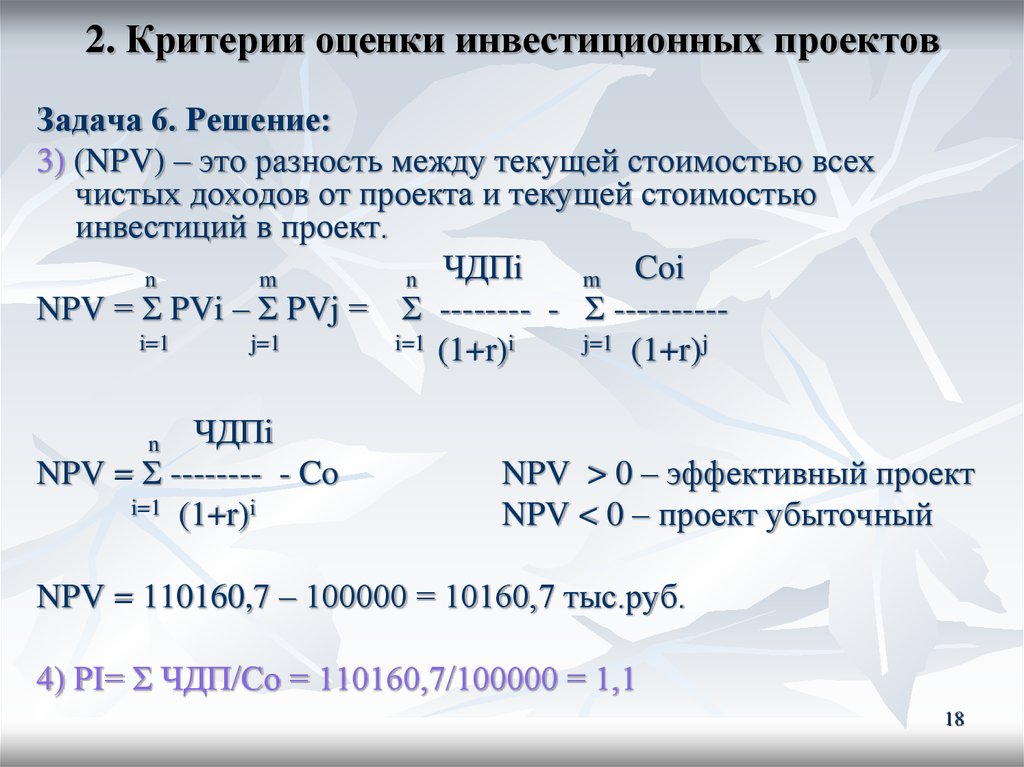 Таким образом, вы сможете принимать более обоснованные решения о том, на чем следует сосредоточить свой бюджет.
Таким образом, вы сможете принимать более обоснованные решения о том, на чем следует сосредоточить свой бюджет.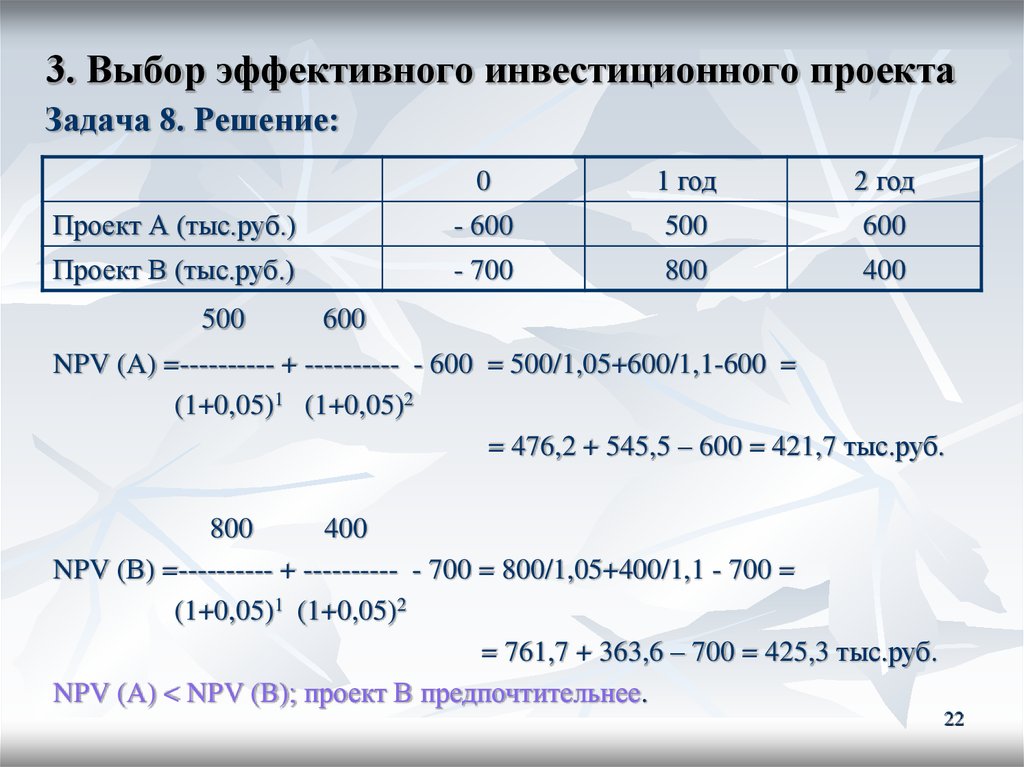
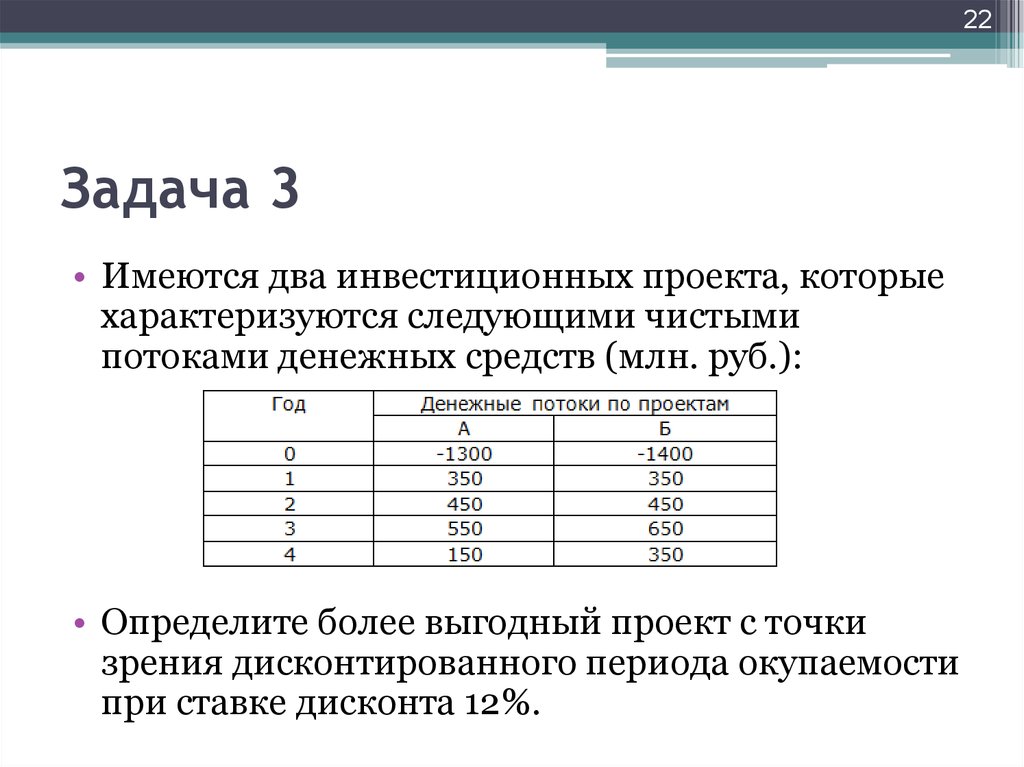 Не делайте крупных покупок сразу — кто-то, обещающий луну, скорее всего, не принесет хороших доходов.
Не делайте крупных покупок сразу — кто-то, обещающий луну, скорее всего, не принесет хороших доходов. «Принимая во внимание, что другие инвестиции, которые приносят 4% ROI, могут приносить положительный денежный доход инвесторам». Зависимость исключительно от ROI для оценки финансового состояния проекта дает вам лишь частичное понимание того, что влияет на ваши финансы.
«Принимая во внимание, что другие инвестиции, которые приносят 4% ROI, могут приносить положительный денежный доход инвесторам». Зависимость исключительно от ROI для оценки финансового состояния проекта дает вам лишь частичное понимание того, что влияет на ваши финансы.
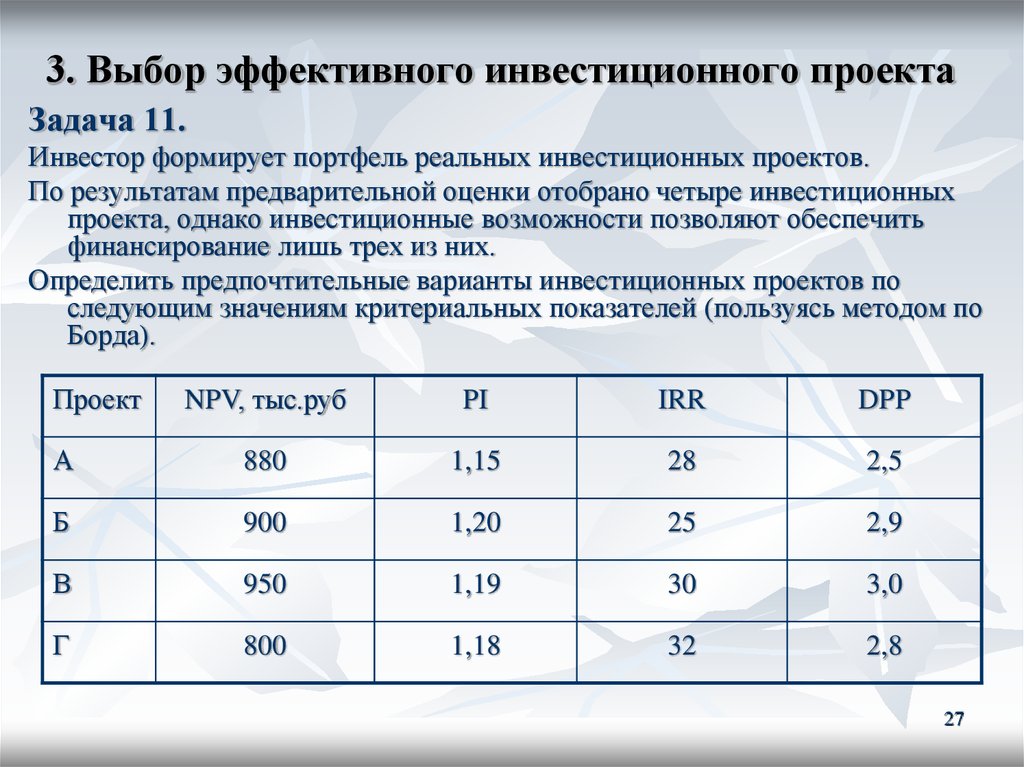
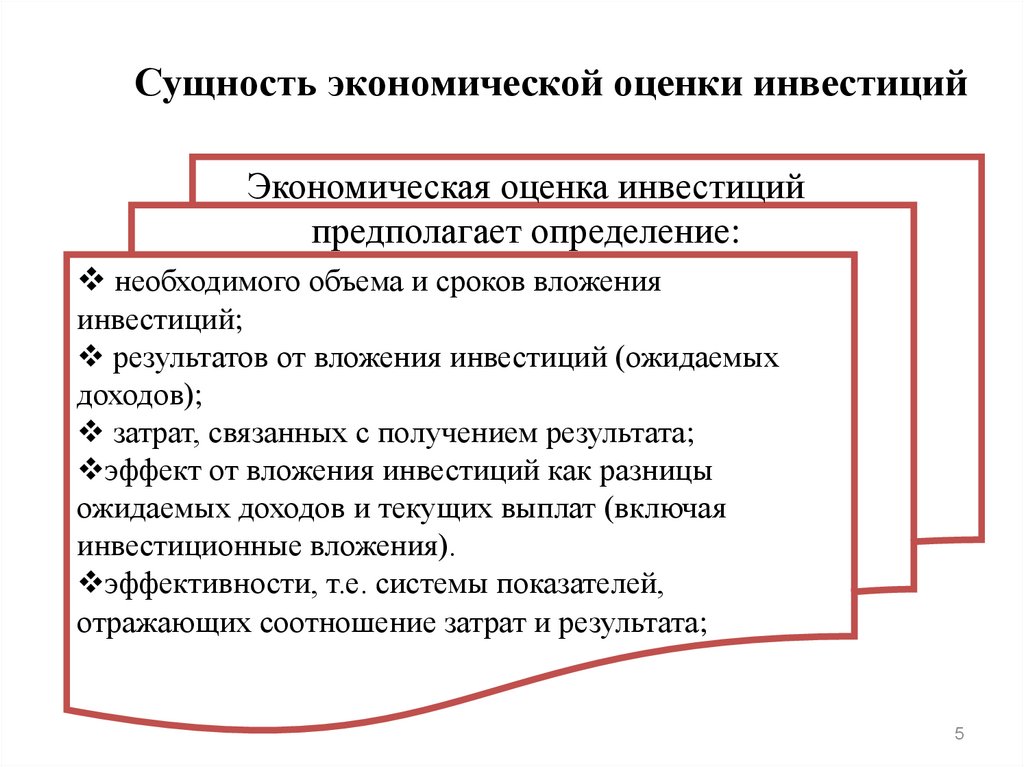 Учитывайте контекст при использовании ROI для определения эффективности отделов.
Учитывайте контекст при использовании ROI для определения эффективности отделов. Если вы инвестируете 100 000 долларов США в акции компании, а через 12 месяцев она вырастет до 160 000 долларов США, ваша рентабельность инвестиций составит 60 %, потому что:
Если вы инвестируете 100 000 долларов США в акции компании, а через 12 месяцев она вырастет до 160 000 долларов США, ваша рентабельность инвестиций составит 60 %, потому что: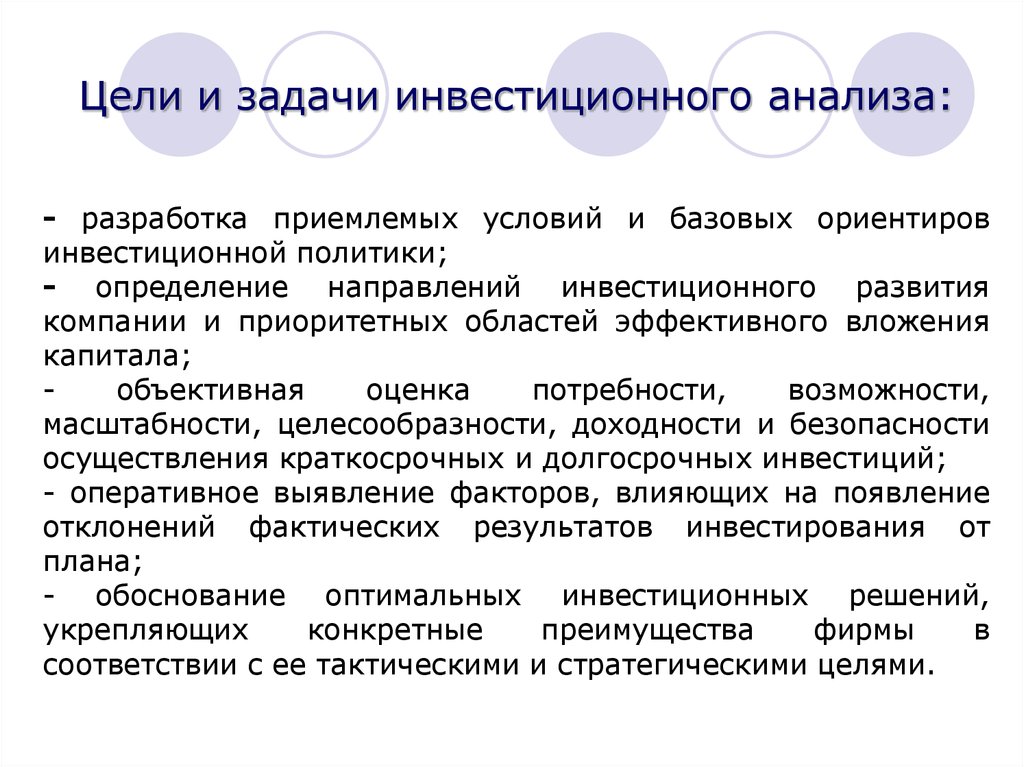 При правильном использовании ROI вы можете максимально использовать свои ресурсы для долгосрочного успеха.
При правильном использовании ROI вы можете максимально использовать свои ресурсы для долгосрочного успеха.
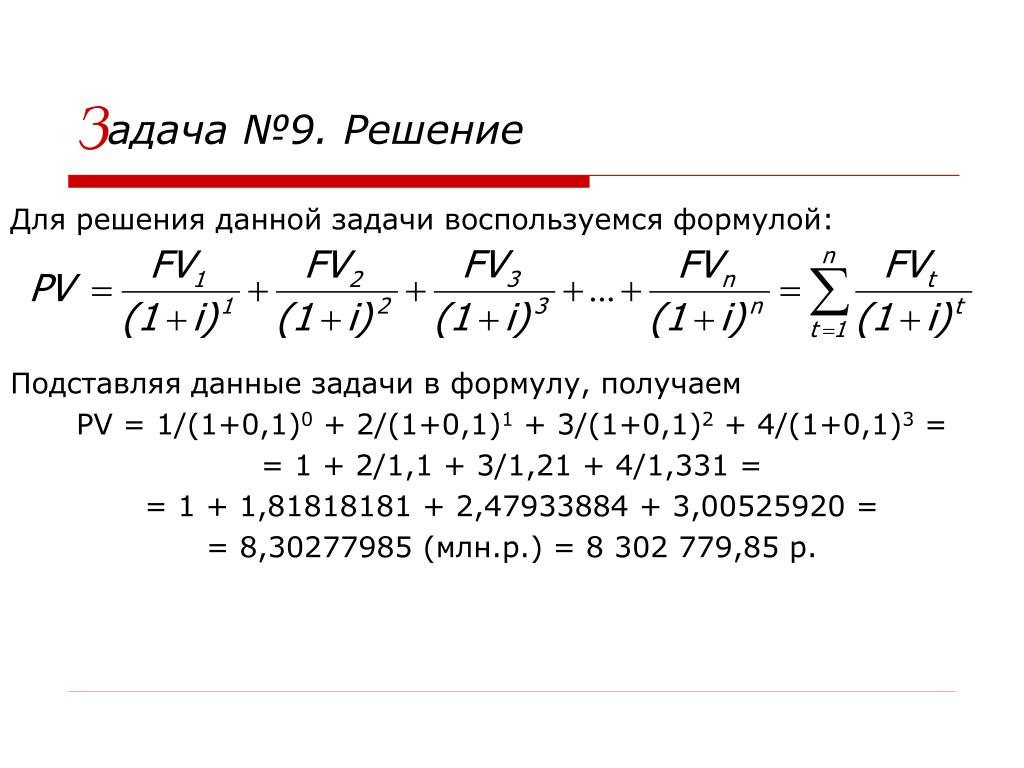 Это потому, что деньги уходят из бизнеса, чтобы покрыть покупку.
Это потому, что деньги уходят из бизнеса, чтобы покрыть покупку.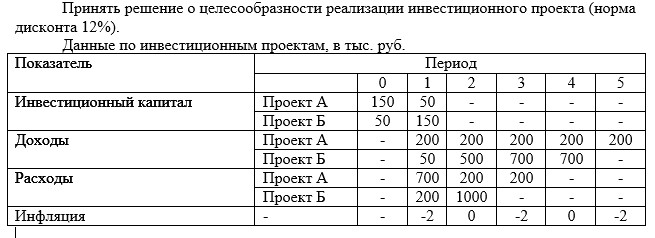
 =
= Векторное произведение векторов. Смешанное произведение векторов
Векторное произведение векторов. Смешанное произведение векторов Найдите площадь, если , а угол между ними 30°.
Найдите площадь, если , а угол между ними 30°. Для этого их соответствующие координаты множатся и складываются.
Для этого их соответствующие координаты множатся и складываются.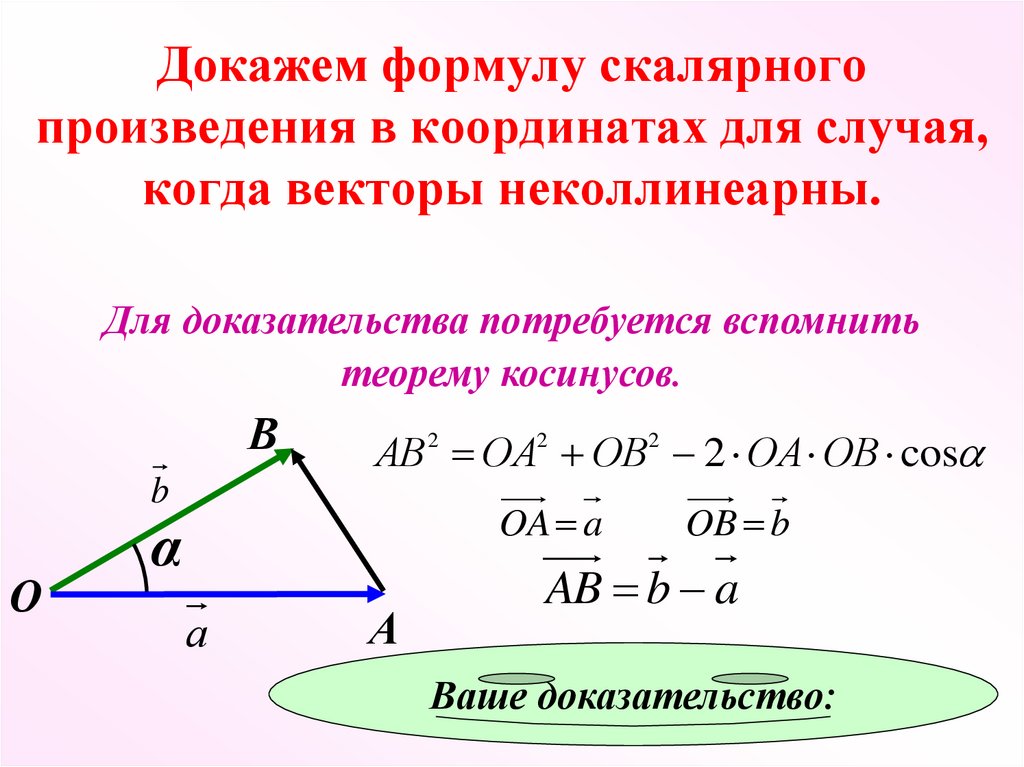
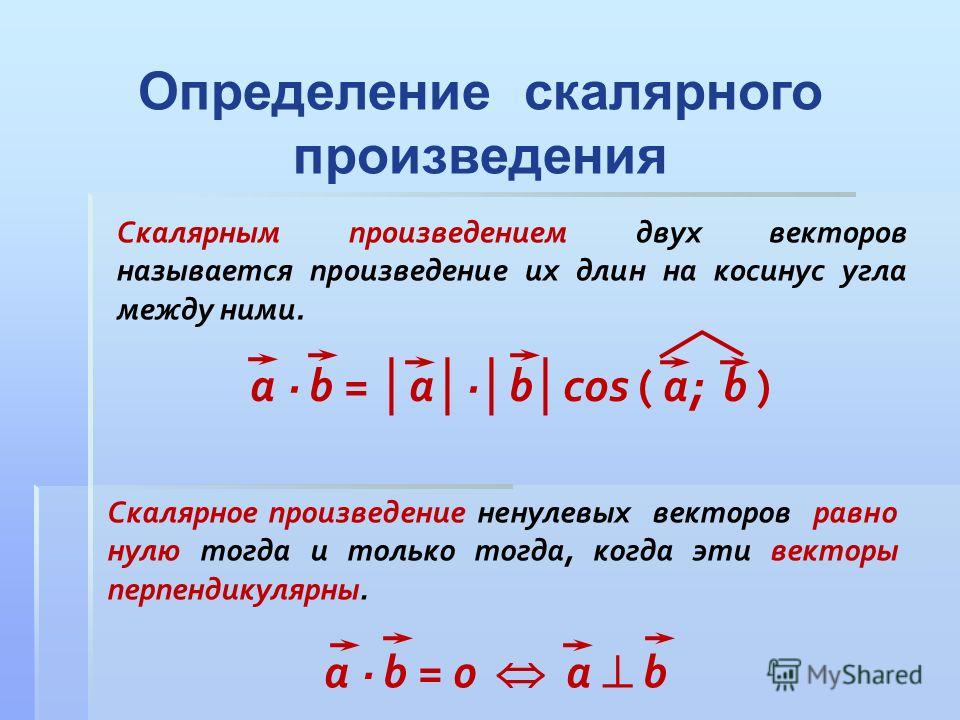 3 поделите на произведение длин векторов, которые были рассчитаны в п. 2 (Cos(α)= │a b│/(│a│ │ b│)).
3 поделите на произведение длин векторов, которые были рассчитаны в п. 2 (Cos(α)= │a b│/(│a│ │ b│)).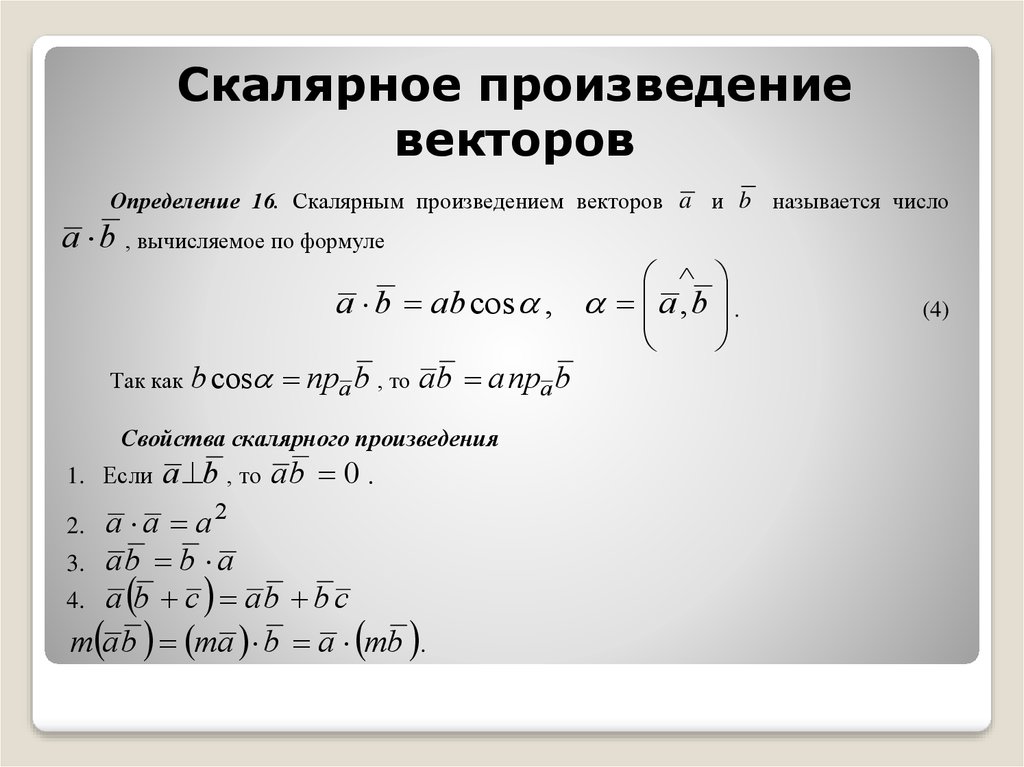 Может сложиться впечатление, что мы залезаем в дебри аналитической геометрии. Это не так. В данном разделе высшей математики вообще мало дров, разве что на Буратино хватит. На самом деле материал очень распространенный и простой – вряд ли сложнее, чем то же скалярное произведение , даже типовых задач поменьше будет. Главное в аналитической геометрии, как многие убедятся или уже убедились, НЕ ОШИБАТЬСЯ В ВЫЧИСЛЕНИЯХ. Повторяйте как заклинание, и будет вам счастье =)
Может сложиться впечатление, что мы залезаем в дебри аналитической геометрии. Это не так. В данном разделе высшей математики вообще мало дров, разве что на Буратино хватит. На самом деле материал очень распространенный и простой – вряд ли сложнее, чем то же скалярное произведение , даже типовых задач поменьше будет. Главное в аналитической геометрии, как многие убедятся или уже убедились, НЕ ОШИБАТЬСЯ В ВЫЧИСЛЕНИЯХ. Повторяйте как заклинание, и будет вам счастье =)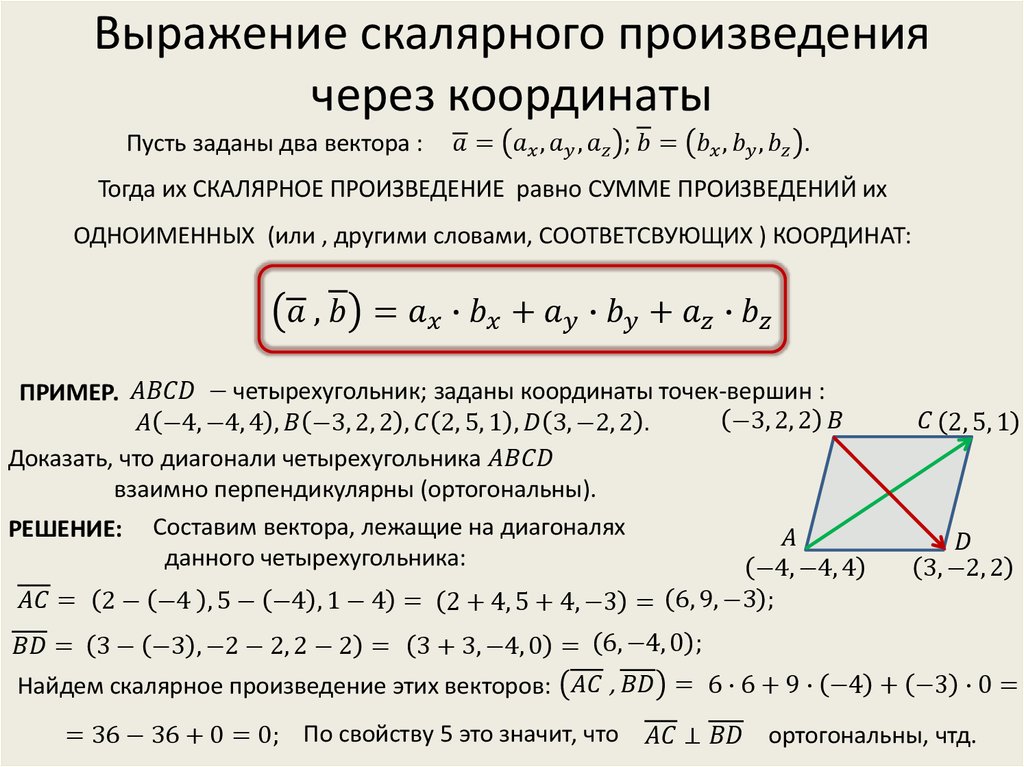 Почему? Такими уж родились данные действия – векторное и смешанное произведение векторов определены и работают в трёхмерном пространстве. Уже проще!
Почему? Такими уж родились данные действия – векторное и смешанное произведение векторов определены и работают в трёхмерном пространстве. Уже проще!
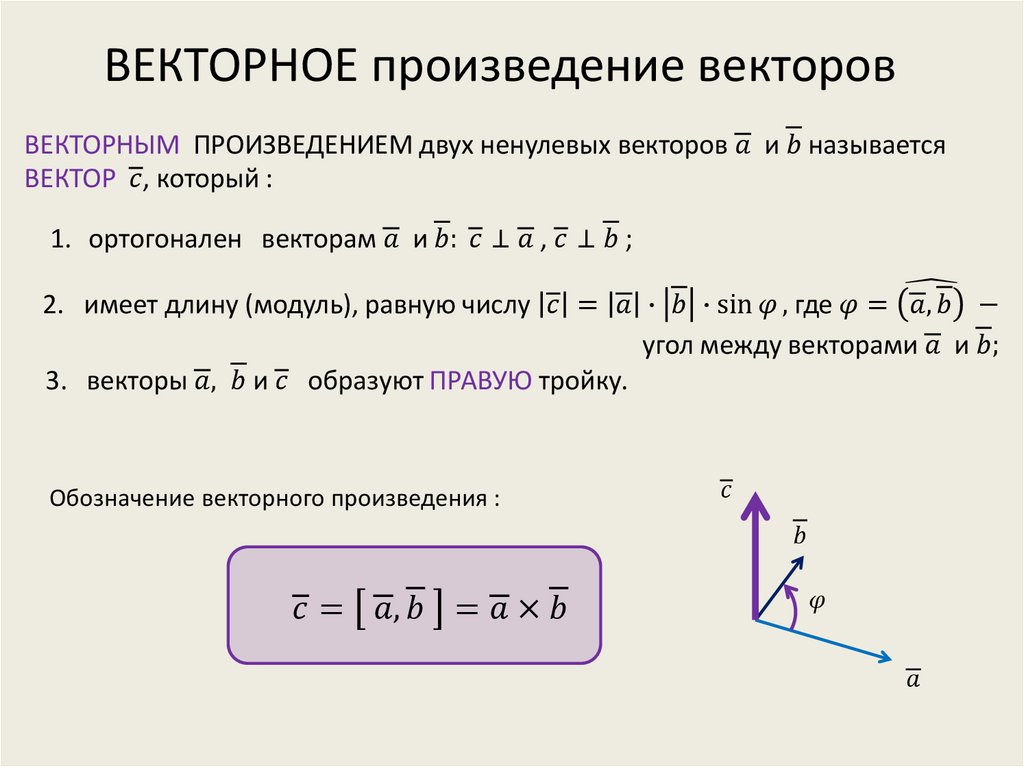 То есть, справедливо равенство .
То есть, справедливо равенство . Следовательно, площадь треугольника, построенного на векторах (красная штриховка), можно найти по формуле:
Следовательно, площадь треугольника, построенного на векторах (красная штриховка), можно найти по формуле: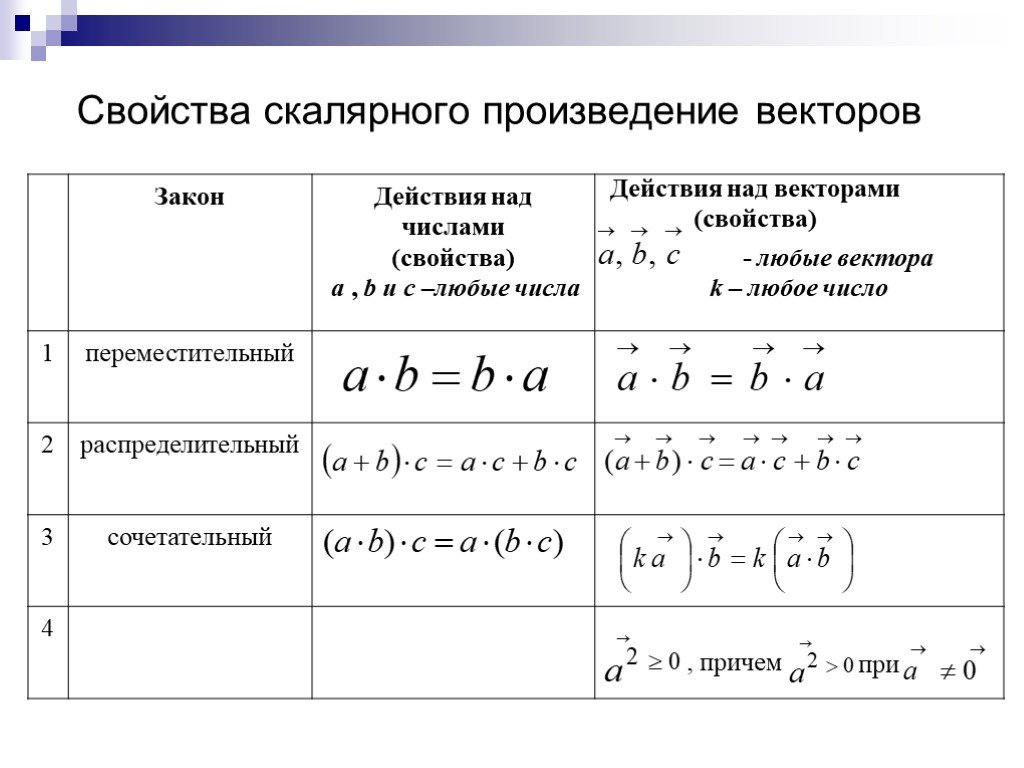 Это тоже правоориентированный базис. Возможно, у вас возник вопрос: а какой базис имеет левую ориентацию? «Присвойте» тем же пальцам левой руки векторы , и полУчите левый базис и левую ориентацию пространства (в этом случае большой палец расположится по направлению нижнего вектора) . Образно говоря, данные базисы «закручивают» или ориентируют пространство в разные стороны. И это понятие не следует считать чем-то надуманным или абстрактным – так, например, ориентацию пространства меняет самое обычное зеркало, и если «вытащить отражённый объект из зазеркалья», то его в общем случае не удастся совместить с «оригиналом». Кстати, поднесите к зеркалу три пальца и проанализируйте отражение;-)
Это тоже правоориентированный базис. Возможно, у вас возник вопрос: а какой базис имеет левую ориентацию? «Присвойте» тем же пальцам левой руки векторы , и полУчите левый базис и левую ориентацию пространства (в этом случае большой палец расположится по направлению нижнего вектора) . Образно говоря, данные базисы «закручивают» или ориентируют пространство в разные стороны. И это понятие не следует считать чем-то надуманным или абстрактным – так, например, ориентацию пространства меняет самое обычное зеркало, и если «вытащить отражённый объект из зазеркалья», то его в общем случае не удастся совместить с «оригиналом». Кстати, поднесите к зеркалу три пальца и проанализируйте отражение;-)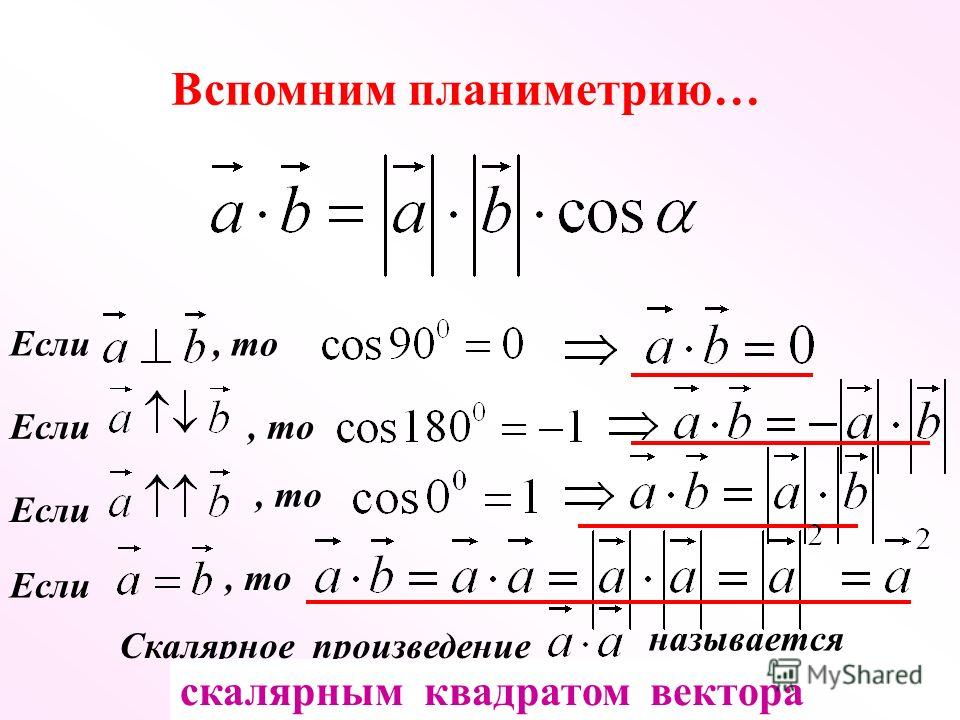 Если векторы коллинеарны, то их можно расположить на одной прямой и наш параллелограмм тоже «складывается» в одну прямую. Площадь такого, как говорят математики, вырожденного параллелограмма равна нулю. Это же следует и из формулы – синус нуля или 180-ти градусов равен нулю, а значит, и площадь нулевая
Если векторы коллинеарны, то их можно расположить на одной прямой и наш параллелограмм тоже «складывается» в одну прямую. Площадь такого, как говорят математики, вырожденного параллелограмма равна нулю. Это же следует и из формулы – синус нуля или 180-ти градусов равен нулю, а значит, и площадь нулевая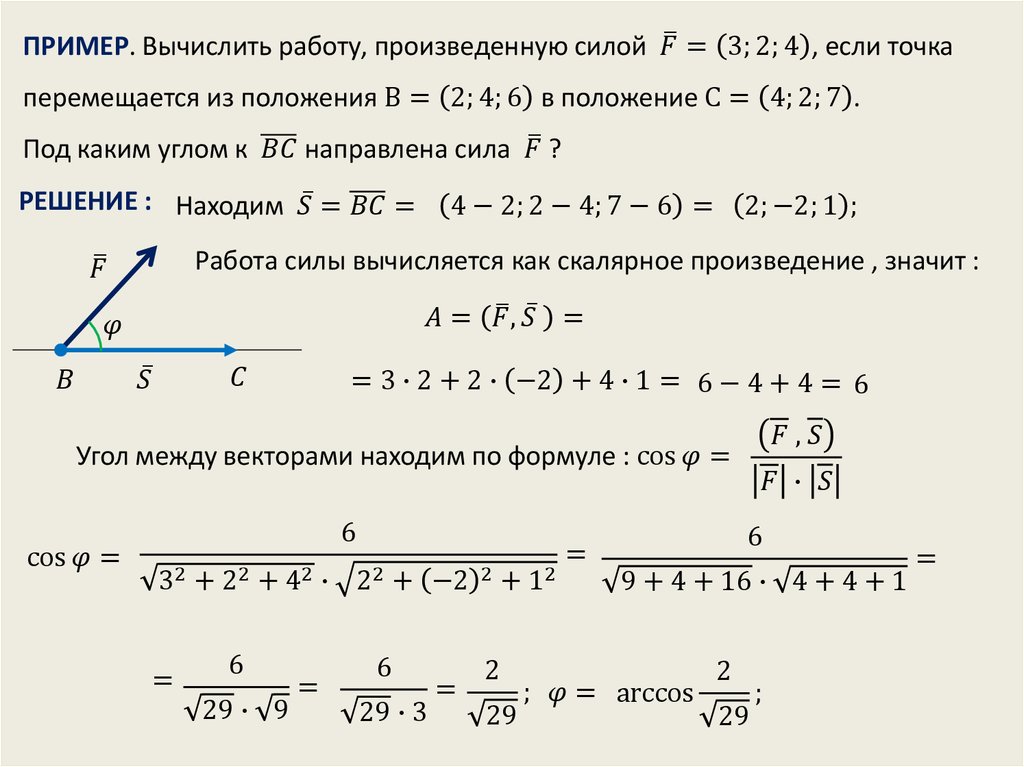 Потому что оформление решений будет отличаться!
Потому что оформление решений будет отличаться! Этот момент всегда нужно держать на контроле, решая любую задачу по высшей математике, да и по другим предметам тоже.
Этот момент всегда нужно держать на контроле, решая любую задачу по высшей математике, да и по другим предметам тоже.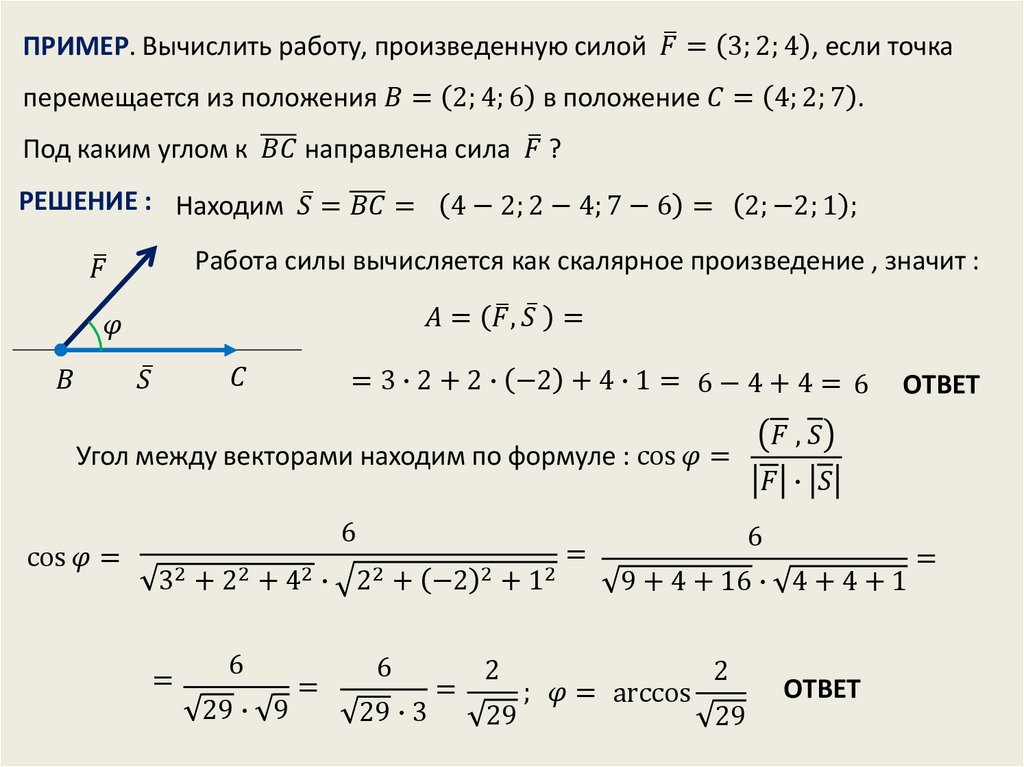 Поэтому пусть будет.
Поэтому пусть будет.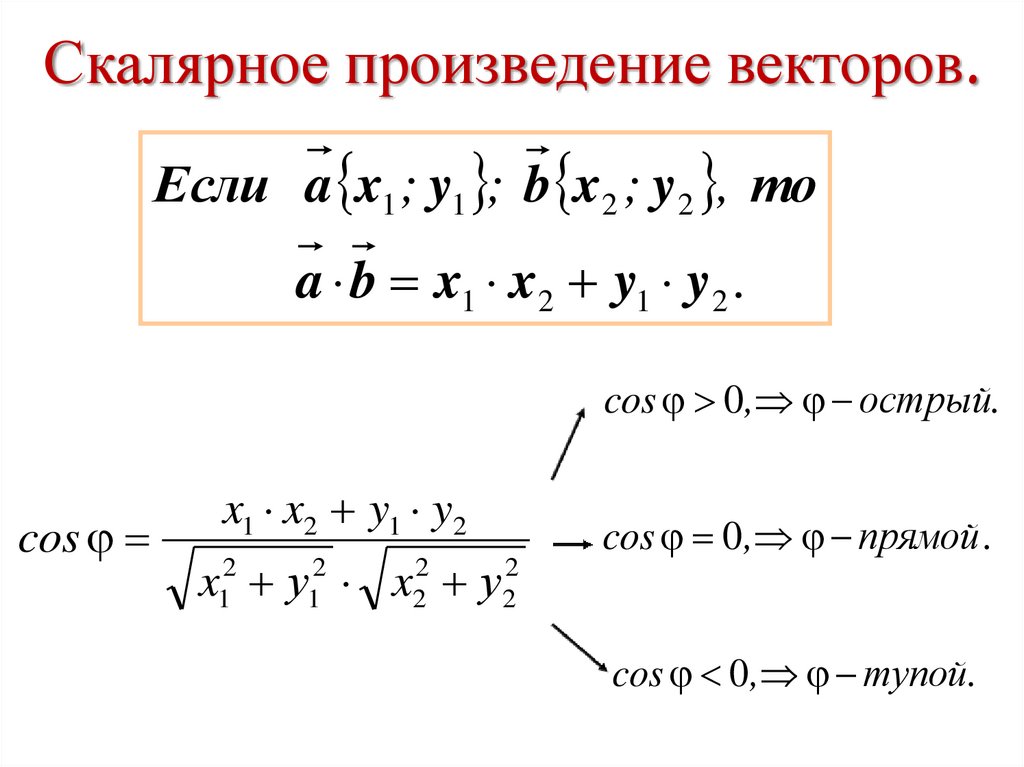 Загвоздка состоит в том, что векторы «цэ» и «дэ» сами представлены в виде сумм векторов. Алгоритм здесь стандартен и чем-то напоминает примеры № 3 и 4 урока Скалярное произведение векторов . Решение для ясности разобьём на три этапа:
Загвоздка состоит в том, что векторы «цэ» и «дэ» сами представлены в виде сумм векторов. Алгоритм здесь стандартен и чем-то напоминает примеры № 3 и 4 урока Скалярное произведение векторов . Решение для ясности разобьём на три этапа: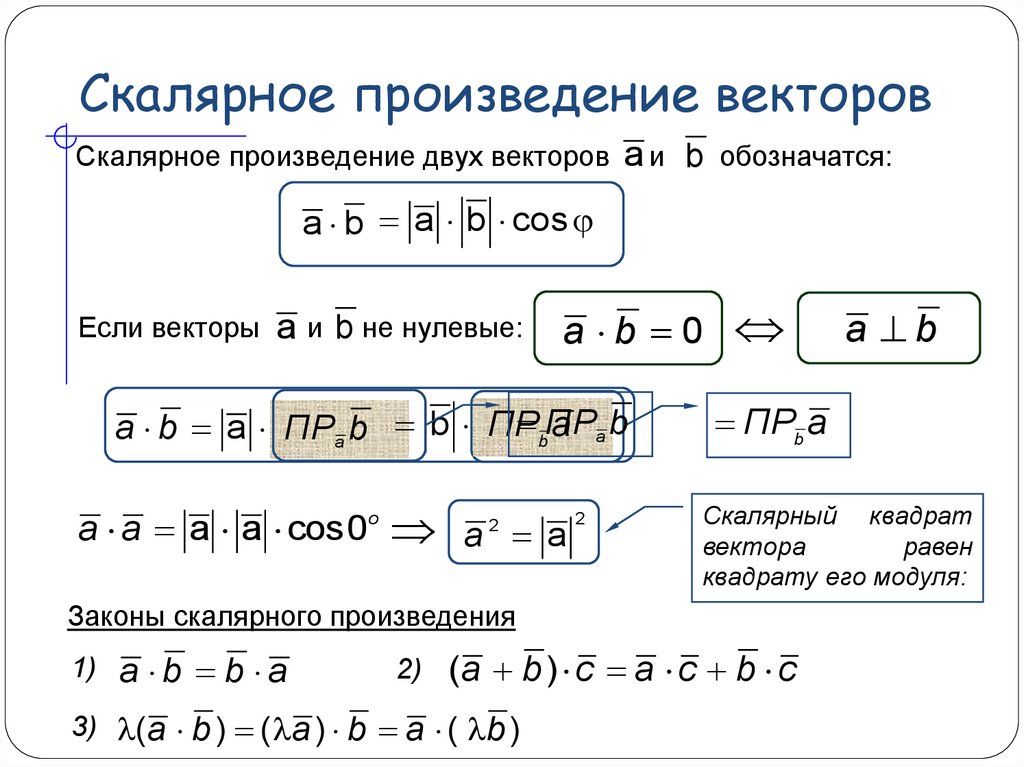 Данное действие напоминает Пример 3:
Данное действие напоминает Пример 3: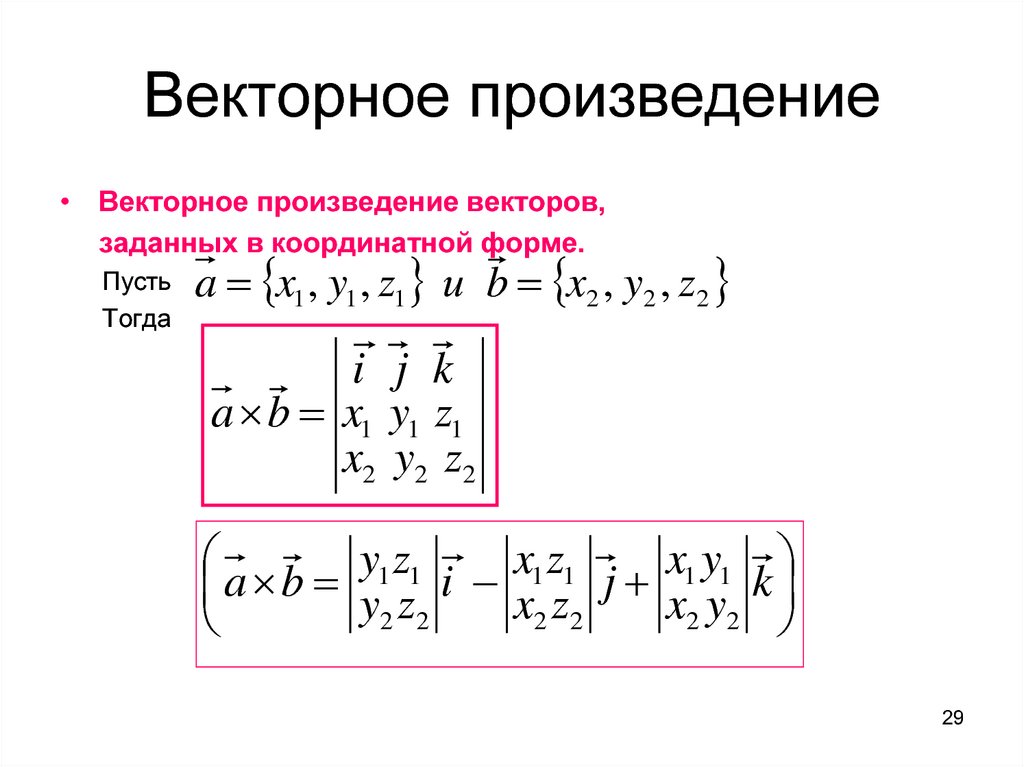
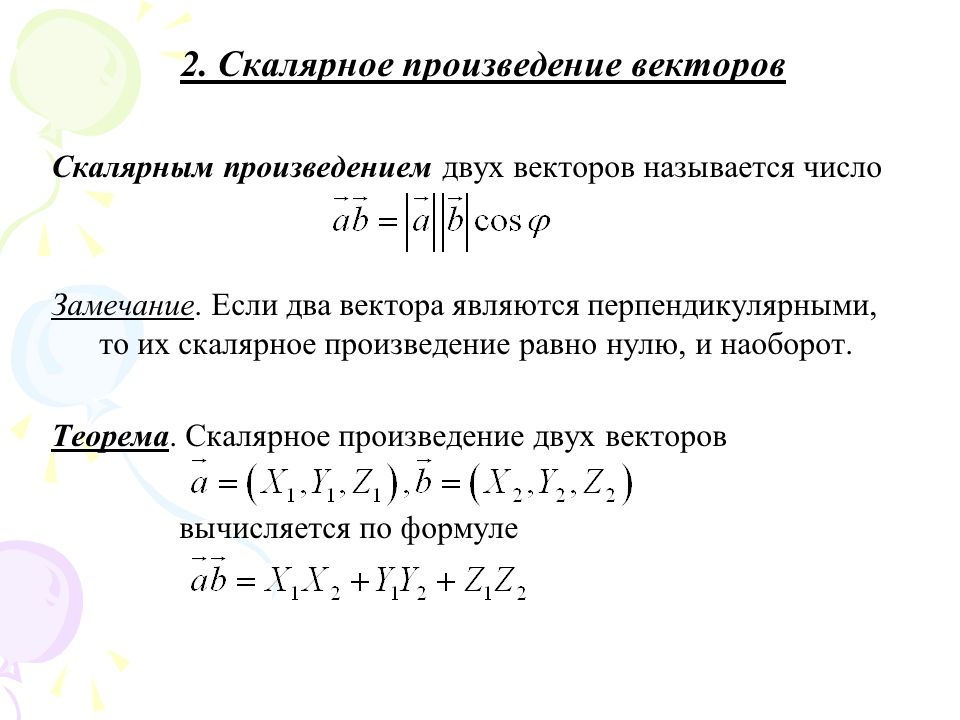
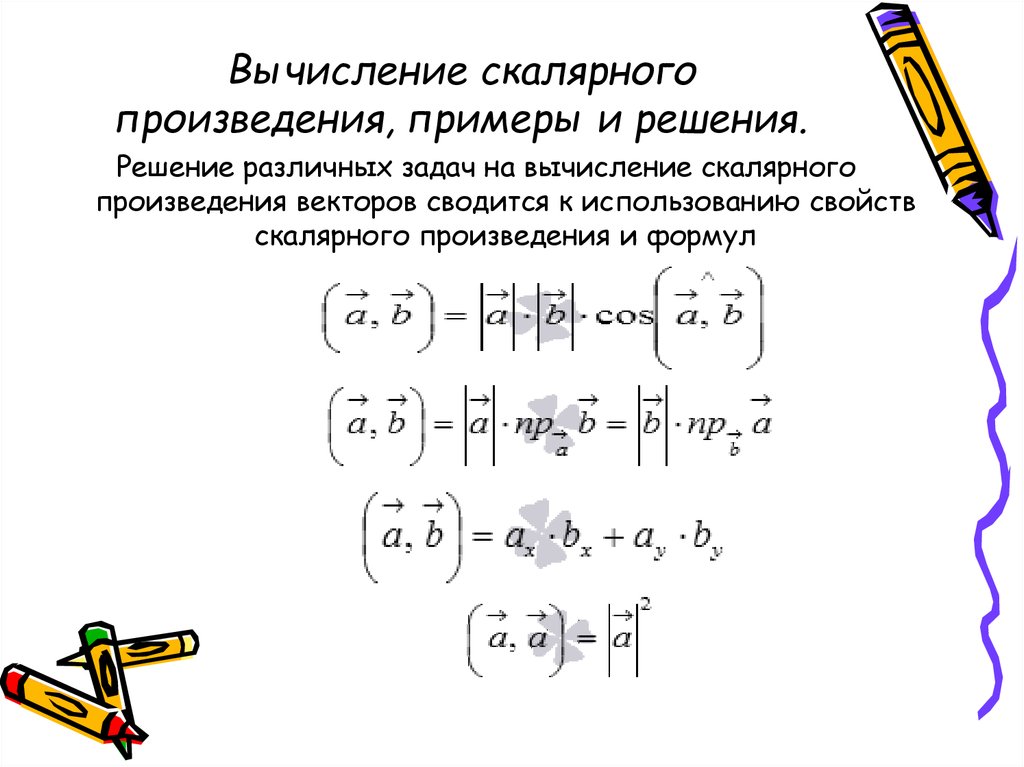 Вместо того, чтобы вручную вычислять скалярное произведение, вы можете просто ввести требуемые значения (два или более вектора здесь) в этот калькулятор векторного скалярного произведения, и он вычислит для вас скалярное (внутреннее) произведение.
Вместо того, чтобы вручную вычислять скалярное произведение, вы можете просто ввести требуемые значения (два или более вектора здесь) в этот калькулятор векторного скалярного произведения, и он вычислит для вас скалярное (внутреннее) произведение.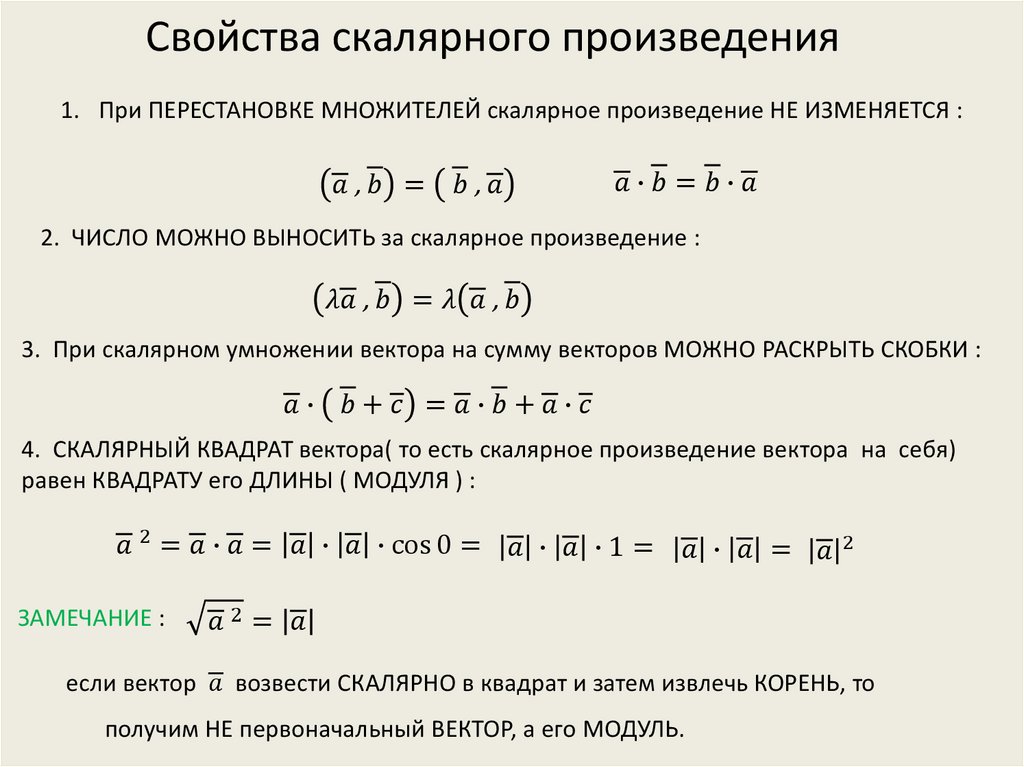
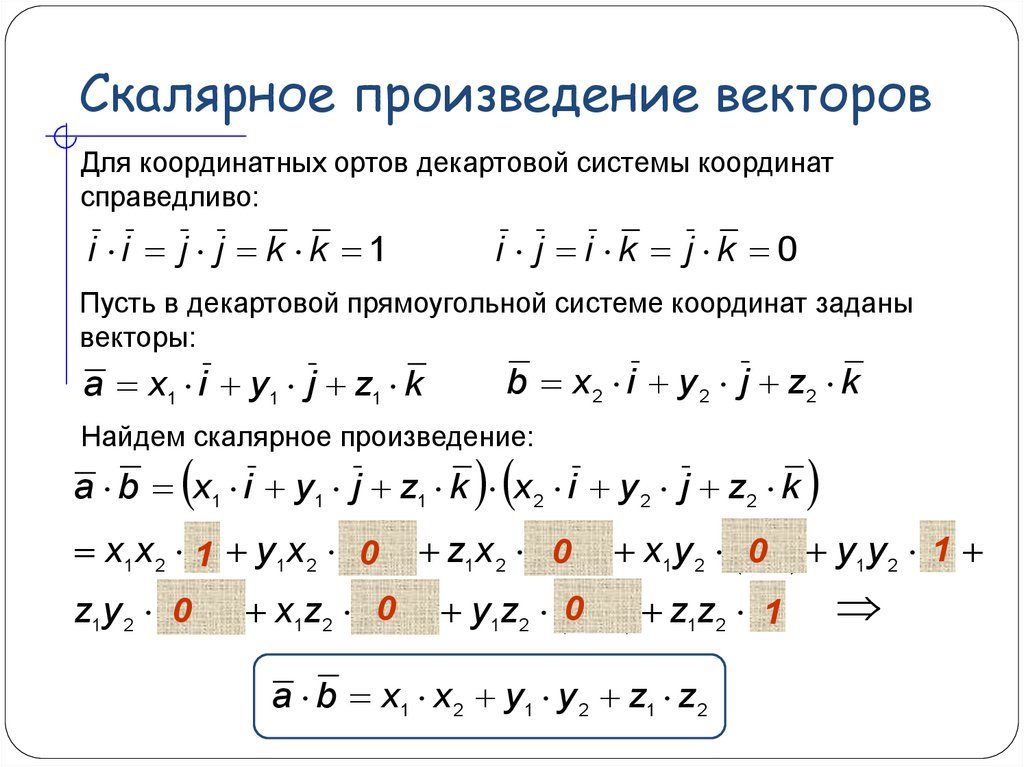 Самая большая разница между этими произведениями заключается в том, что произведение операции с точкой всегда является одним числом, а произведение перекрестной операции всегда является вектором.
Самая большая разница между этими произведениями заключается в том, что произведение операции с точкой всегда является одним числом, а произведение перекрестной операции всегда является вектором.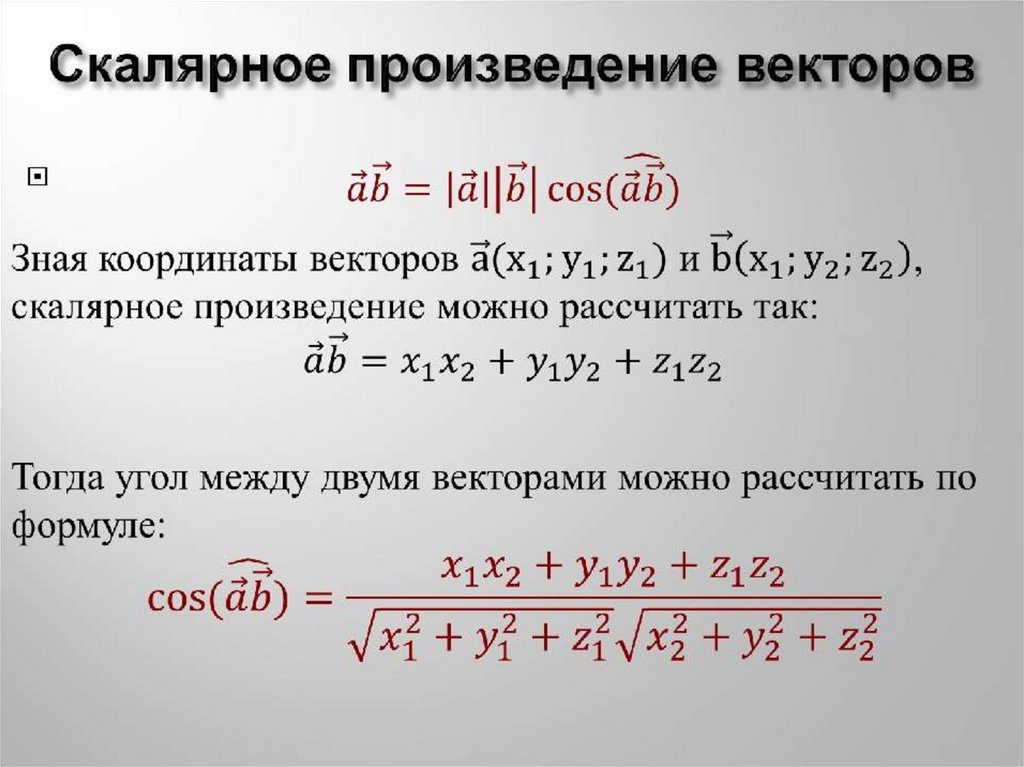 Но если вы хотите приложить усилия для расчета вручную, давайте продолжим.
Но если вы хотите приложить усилия для расчета вручную, давайте продолжим. Для этого вам понадобится следующая формула:
Для этого вам понадобится следующая формула: 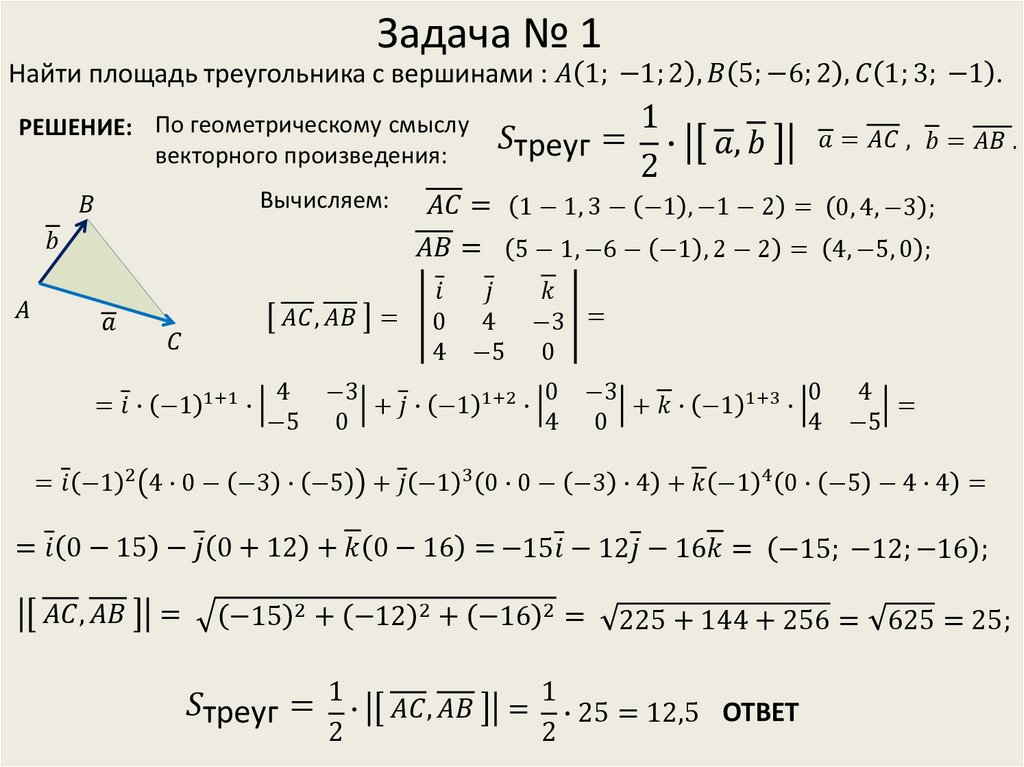
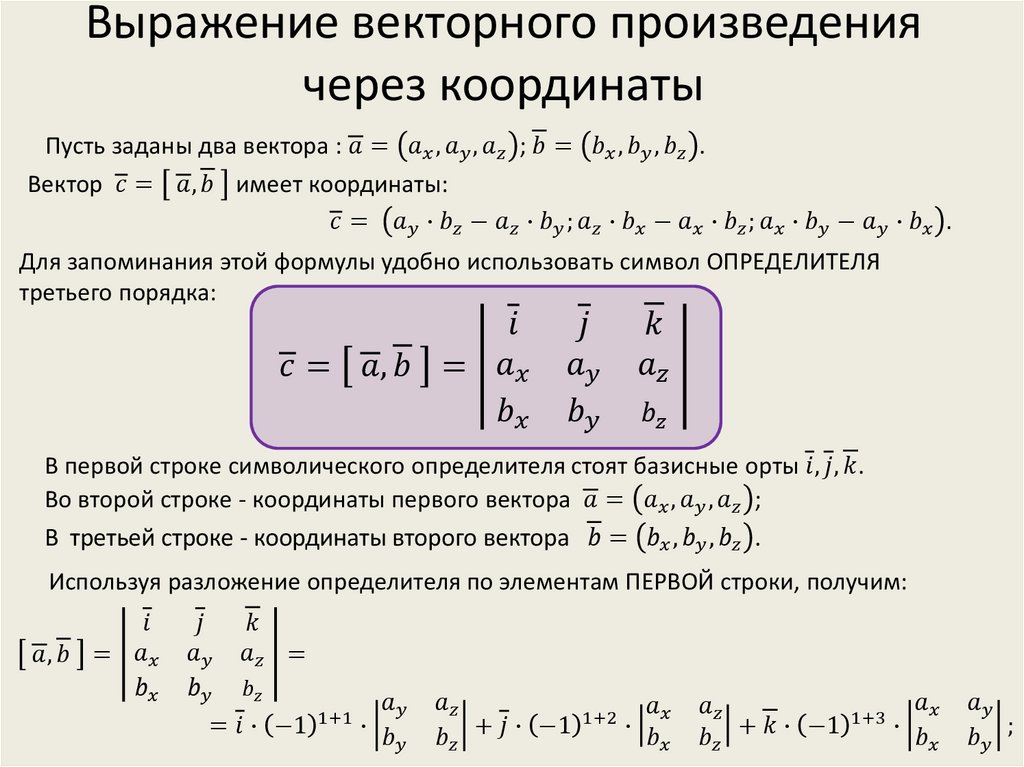

 Вот нашёл неплохую мини-игру, где полностью реализована игра шахматы. К тому же здесь играют живые люди и постоянно есть свободный соперник. К тому же можно выставить максимально время для обдумывания ходов.
Вот нашёл неплохую мини-игру, где полностью реализована игра шахматы. К тому же здесь играют живые люди и постоянно есть свободный соперник. К тому же можно выставить максимально время для обдумывания ходов. Творением дьявола называли они шахматы и всей своей деятельностью противостояли проникновению умной игры в массы. Но несмотря ни на что двуцветная доска все сильнее притягивала человечество на разных этапах цивилизации, а движение черно-белых фигурок принимали за настоящую магию.
Творением дьявола называли они шахматы и всей своей деятельностью противостояли проникновению умной игры в массы. Но несмотря ни на что двуцветная доска все сильнее притягивала человечество на разных этапах цивилизации, а движение черно-белых фигурок принимали за настоящую магию. Своим названием увлекательное занятие обязано персидскому языку, в переводе с которого означает «шах умер». Первым появлением исследователи называют VI век и Индию, правила и условия шахматной игры менялись на протяжении столетий.
Своим названием увлекательное занятие обязано персидскому языку, в переводе с которого означает «шах умер». Первым появлением исследователи называют VI век и Индию, правила и условия шахматной игры менялись на протяжении столетий.
 Это мероприятие открыто для учащихся K-12. Требуется действующее членство в US Chess ( вы можете присоединиться или продлить свое членство здесь ). Затронуты только рейтинги US Chess Online.
Это мероприятие открыто для учащихся K-12. Требуется действующее членство в US Chess ( вы можете присоединиться или продлить свое членство здесь ). Затронуты только рейтинги US Chess Online. Если ссылка не будет получена до 8:00 утра следующего дня, свяжитесь с организаторами по адресу
Если ссылка не будет получена до 8:00 утра следующего дня, свяжитесь с организаторами по адресу  com для получения информации о том, как оплатить с помощью Zelle или Venmo.
com для получения информации о том, как оплатить с помощью Zelle или Venmo. вместо карты Amazon)
вместо карты Amazon)  будут приглашены на сеанс анализа через Zoom с титулованными игроками. Сессия начинается в 13:00 по центральному времени.
будут приглашены на сеанс анализа через Zoom с титулованными игроками. Сессия начинается в 13:00 по центральному времени. Любые победы или ничьи против нарушителей честной игры остаются в силе, хотя игры не будут оцениваться.
Любые победы или ничьи против нарушителей честной игры остаются в силе, хотя игры не будут оцениваться. с уровнями сложности легкий, средний и жесткий. Вы также можете узнать о шахматных терминах. Эта игра в шахматы является частью детских игр.
с уровнями сложности легкий, средний и жесткий. Вы также можете узнать о шахматных терминах. Эта игра в шахматы является частью детских игр.
 Каждая часть имеет четкую схему движения. Прочитайте подробную страницу о движении шахматных фигур
Каждая часть имеет четкую схему движения. Прочитайте подробную страницу о движении шахматных фигур Принимаются разные решения, чтобы защитить территорию, атаковать фигуры противника, спасти свои фигуры и получить преимущество.
Принимаются разные решения, чтобы защитить территорию, атаковать фигуры противника, спасти свои фигуры и получить преимущество. Стивен Эдвардс разработал формат PGN в 1933 году. Прочитайте подробные инструкции о том, как читать шахматы PGN
Стивен Эдвардс разработал формат PGN в 1933 году. Прочитайте подробные инструкции о том, как читать шахматы PGN

 Вы можете скачать шахматные термины в формате pdf и читать без интернета. Различные названия, такие как шахматные термины и шахматные глоссарии, также означают шахматные термины.
Вы можете скачать шахматные термины в формате pdf и читать без интернета. Различные названия, такие как шахматные термины и шахматные глоссарии, также означают шахматные термины.
 Ниже приведен отсортированный по алфавиту список доступных шахматных движков.
Ниже приведен отсортированный по алфавиту список доступных шахматных движков. ficsgames.org/
ficsgames.org/ in/chs
in/chs
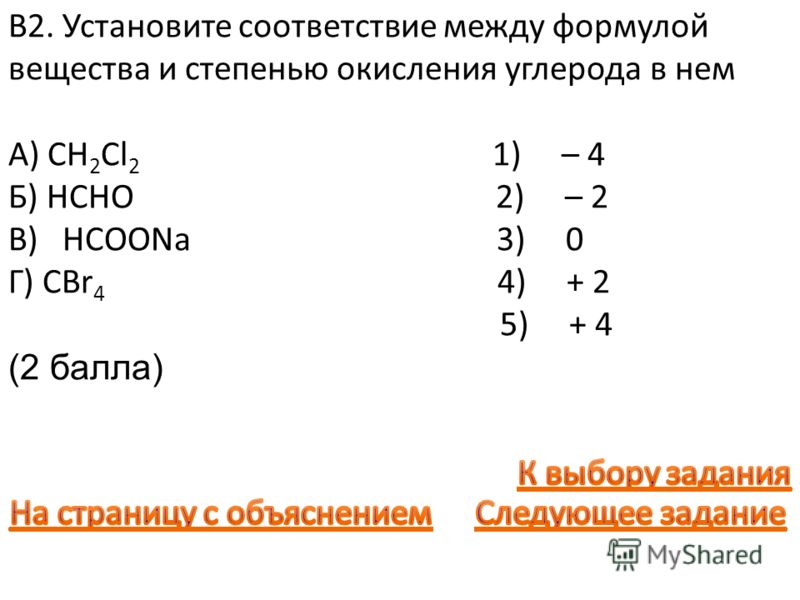 Лабораторные:
Лабораторные: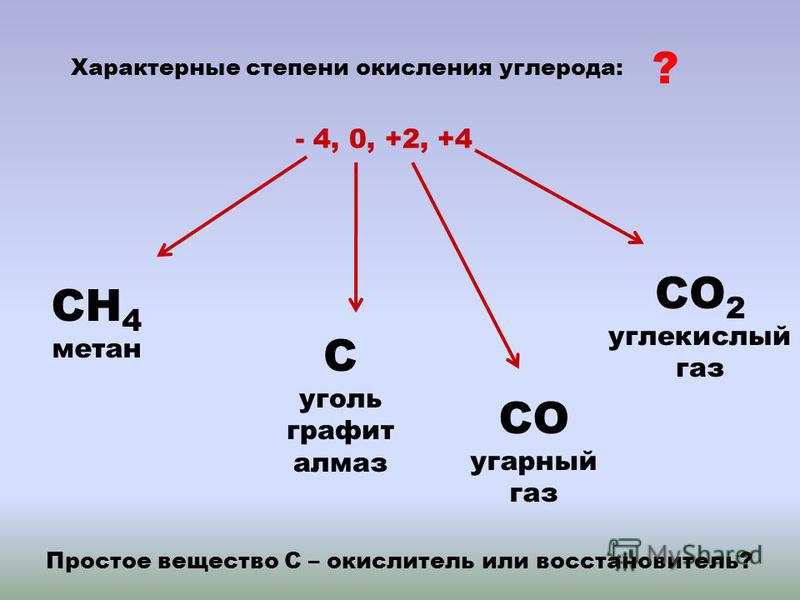

 Действие сильных кислот на карбонаты и гидрокарбонаты:
Действие сильных кислот на карбонаты и гидрокарбонаты:
 Особенно легко разлагается карбонат аммония:
Особенно легко разлагается карбонат аммония: Все они легко растворяются в воде, за исключением NaHCО3.
Все они легко растворяются в воде, за исключением NaHCО3.