
Линейная интерполяция онлайн с решением и графиком
- Подробности
Калькулятор линейной интерполяции позволяет вычислить значение линейной функции промежуточной переменной, зная значения функции переменных меньше и больше искомого.
Если абсцисса (Х) искомой точки лежит за пределами отрезка интерполяции [X1, X2], то необходимо использовать калькулятор линейной экстраполяции.
Дано:
округление до 12345знаков после запятой
Решение:
Формула линейной интерполяции
расчет линейной интерполяции по двум точкам
Помощь на развитие проекта premierdevelopment.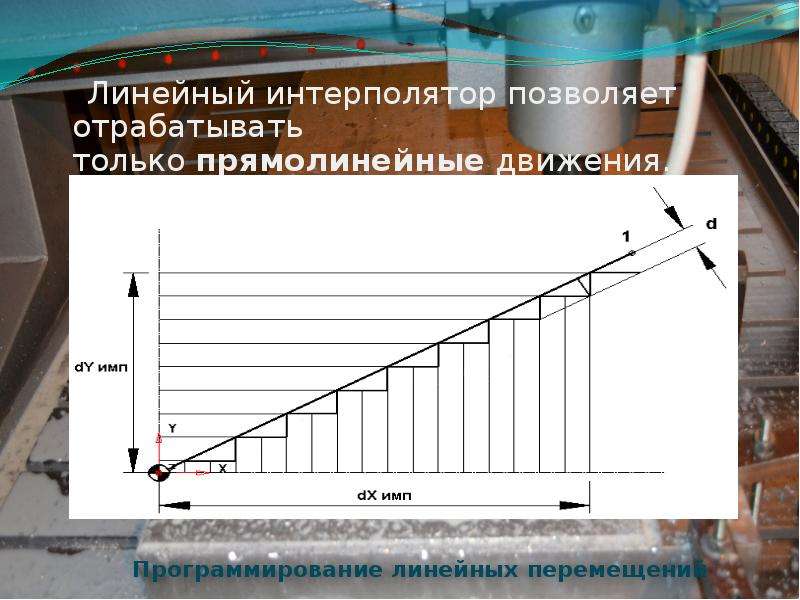 ru
ru
Спасибо, что не прошели мимо!
I. Порядок действий при расчете линейной интерполяции онлайн калькулятором:
- Для проведения интерполяции требуется ввести значения координат 2 точек ([X1, Y1]; [X2, Y2]) и абсциссу (Х) той точки, значение которой необходимо вычислить.
- Точка X1 должна лежать левее точки X2 (X1 < X2), а точка X должна лежать между точками X1 и X2 (X1 < X < X2).
- В случае невыполнения одного из условий пункта 2, будет показано соответствующее предупреждение.
- График справа позволяет визуализировать полученный линейной интерполяцией результат.
II. Для справки:
- интерполяция
- — способ нахождения промежуточных значений величины по имеющемуся дискретному набору известных значений.

- линейная интерполяция
- — нахождение промежуточного значения функции по двум точкам (условно проведя прямую между ними).
- квадратичная интерполяция
- — нахождение промежуточного значения функции по трем точкам (интерполирующая функция многочлен второго порядка — парабола).
- экстраполяция
- — способ нахождения значений функции по уже известным нескольким ее значениям.

Калькулятор интерполяции — Найти точку интерполяции
Онлайн-калькулятор интерполяции помогает найти интерполированные значения для точек данных на линии или кривой. Калькулятор отображает интерполированную точку на линии и показывает пошаговое решение с использованием формулы линейной интерполяции.
Просто прочтите контекст, чтобы получить общее представление о том, как выполнять интерполяцию, ее формулу и некоторые стандартные термины, которые помогают понять интерполяцию.
Что такое линейная интерполяция в математике?
интерполяция калькулятор – это метод создания новых точек данных в уже известном дискретном наборе точек данных. В этой математической процедуре некоторые исходные точки данных могут быть интерполированы для создания простой и новой функции, которая будет близка к исходным данным. Эта интеграция нового значения называется интерполяцией. Другими словами, мы также можем сказать, что линейный интерполянт – это прямая линия, которая существует между двумя распознанными координатными точками (x0, y0) и (x1, y1). Вы можете легко найти значение интерполяции между двумя координатами на прямой с помощью калькулятор интерполяции.
В этой математической процедуре некоторые исходные точки данных могут быть интерполированы для создания простой и новой функции, которая будет близка к исходным данным. Эта интеграция нового значения называется интерполяцией. Другими словами, мы также можем сказать, что линейный интерполянт – это прямая линия, которая существует между двумя распознанными координатными точками (x0, y0) и (x1, y1). Вы можете легко найти значение интерполяции между двумя координатами на прямой с помощью калькулятор интерполяции.
Формула линейной интерполяции:
Формула линейной интерполяции:
$$ y = y1 + ((x – x1) / (x2 – x1)) * (y2 – y1) $$
В этом уравнении интерполяции:
- X = известное значение,
- y = неизвестное значение,
- x1 и y1 = координаты, которые ниже известного значения x
- x2 и y2 = координаты выше значения x.
Кроме того, интерполяция онлайн калькулятор уклона помогает найти точки уклона или уклона A (x1, y1) и B (y1, y2) в декартовой координатной плоскости.
Пример1:
Если заданными точками данных являются (2, 4) и (6, 8), как вы рассчитаете значение y, когда x = 2.
На первом этапе мы извлечем координаты заданных точек данных.
$$ x1 = 2 $$
$$ y1 = 4 $$
$$ x2 = 6 $$
$$ y2 = 8 $$
На втором этапе мы возьмем следующие уравнения, чтобы получить значения m, а затем y
- \ (m = y2 – y1 / x2 − x1 \) = уравнение 1
- \ (y = y1 + m * (x – x1) \) = уравнение 2
- Чтобы вычислить значение m, поместите значения в уравнение 1, \ (= m = 8−4 / 6−2 = 1 \)
- Теперь у нас есть значение m, поэтому мы воспользуемся уравнением 2, чтобы найти значение y.
- \ (у = 4 + 1 * (2–2) = 4 \)
Между тем, x находится в интервале \ ([x1, x2] \), поэтому мы выполнили расчет линейной интерполяции, чтобы найти значение y.
Однако интерполяция онлайн калькулятор поможет вам найти центр тяжести треугольника (ABC), N-точек и N-стороннего многоугольника для заданных координат. 2 \) в заданной строке, пока заданные данные
2 \) в заданной строке, пока заданные данные
«$$ x1 = 4, y1 = 6, x2 = 8, x3 = 12, y3 = 14 $$».
Решение:
Поскольку у нас есть линейное интерполяционное уравнение:
$$ y_2 = (x_2 – x_1) x (y_3- y_1) / (x_3 – x_1) + y_1 $$
Пошаговое решение для нахождения y2 будет таким, как если бы вышеприведенное уравнение было следующим:
$$ y_2 = (x_3 − x_2) x (y_3 − y_1) / (x_3 − x_2) + y_3 $$
$$ y_2 = (12−8) x (14−6) / (12−8) + 14 $$
$$ y_2 = (4) x (8) / (4) + 14 $$
$$ y_2 = (32) / (4) + 14 $$
$$ y_2 = 8 + 14 $$
$$ y_2 = 22 $$
Как работает калькулятор интерполяции линейной?
Вот как работает онлайн-калькулятор для вычисления линейных интерполированных значений.
Вход:
- Введите 5 различных точек данных, чтобы найти линейное интерполированное значение конкретной точки и выполнить интерполяцию.
- Нажмите кнопку “Рассчитать”
Выход:
Онлайн-калькулятор интерполяции предоставит вам следующие результаты:
- Новое интерполированное значение будет отображаться в той точке, где мы хотим провести интерполяцию.
- Этот интерполятор нанесет точку интерполяции на линию.
- Точки входных данных и формула линейной интерполяции
- Это даст вам подробное пошаговое решение для вычисленного интерполированного значения.

Часто задаваемые вопросы (FAQ):
Какой метод можно использовать в любом вопросе интерполяции?
Обычно мы используем метод интерполяции калькулятор полиномов. Причины использования полиномов:
- Их легко оценить
- Дифференциация и интеграция просты.
Это называется полиномиальной интерполяцией.
Когда следует использовать интерполяцию?
Как мы уже знаем, с помощью интерполяции мы можем найти неизвестные точки, поэтому ее можно использовать всякий раз, когда нам нужно предсказать неизвестные значения для любых данных географических точек. Это полезно для прогнозирования осадков, полученных в результате концентраций химических веществ, оценки уровней шума и т. Д.
Какой метод интерполяции лучший?
Интерполяция с обратным взвешиванием по расстоянию (IDW) считается одним из лучших методов для достижения лучших результатов, чем любой другой метод интерполяции калькулятор.
Кригинг – это точная интерполяция?
Методика интерполяция калькулятор обычно связана с точной интерполяцией. Все предсказания Кригинга могут постепенно меняться в космосе. Они будут меняться после того, как попадут в место, где были собраны данные. В этот момент происходит «скачок» прогноза к наиболее точному значению, которое было измерено первым. Однако для быстрых и точных прогнозов можно использовать интерполятор.
интерполяция онлайн калькулятор момент:
Благодаря калькулятор интерполяции линейной для поиска неизвестной точки данных для заданных координат и построения точки на графиках. Кроме того, этот инструмент показывает формулу, которая используется для выполнения требований, с пошаговыми расчетами для облегчения конечных пользователей в кратчайшие сроки. Он обеспечивает бесплатную поддержку в учебных и образовательных целях. Поэтому давайте интерполяция калькулятор найти ответ, поместив известную точку данных в этот интерполятор!
Other Languages: Linear Interpolation Calculator, Kalkulator Interpolasi, Interpolacja Kalkulator, Interpolation Rechner, Interpolasyon Hesaplama, 補間計算, Calculadora De Interpolação, Calcul Interpolation Linéaire, Interpolar Calculadora, Calcolo Interpolazione Lineare, Lineární Interpolace Výpočet, حاسبة الاستيفاء, Interpolointi Laskin. 2 \) allow to estimate the value for \(x = 3 \), here \(f(x) = 9 \).
2 \) allow to estimate the value for \(x = 3 \), here \(f(x) = 9 \).
The Lagrange interpolation method allows a good approximation of polynomial functions.
There are others interpolation formulas (rather than Lagrange/Rechner) such as Neville interpolation also available online on dCode.
You can edit this Q&A (add new info, improve translation, etc.) » itemscope=»» itemtype=»http://schema.org/Question»>
What are the limits for Interpolating with Lagrange?
Since the complexity of the calculations increases with the number of points, the program is limited to 25 coordinates (with distinct x-values in the Q).
Ask a new question
Source code
dCode retains ownership of the source code of the script Lagrange Interpolating Polynomial online. Except explicit open source licence (indicated Creative Commons / free), any algorithm, applet, snippet, software (converter, solver, encryption / decryption, encoding / decoding, ciphering / deciphering, translator), or any function (convert, solve, decrypt, encrypt, decipher, cipher, decode, code, translate) written in any informatic langauge (PHP, Java, C#, Python, Javascript, Matlab, etc. ) which dCode owns rights will not be released for free. To download the online Lagrange Interpolating Polynomial script for offline use on PC, iPhone or Android, ask for price quote on
) which dCode owns rights will not be released for free. To download the online Lagrange Interpolating Polynomial script for offline use on PC, iPhone or Android, ask for price quote on
Интерполяция — метод нахождения промежуточных переменных функции по нескольким уже известным значениям. Впервые формулировка «интерполирование» была введена Джоном Валлисом в научном сочинении «Арифметика бесконечных».
Линейная интерполяция
Простейшим случаем интерполяции является «линейная», то есть нахождение величины по двум заданным точкам. Данный процесс вычисления можно рассмотреть как линейную функцию, тем самым делая расчёт более наглядным. Нанесение функции на систему координат называют аппроксимацией. Для этого на оси координат необходимо провести прямую через известные точки. Логично, что искомое значение, находящееся между первыми двумя точками, можно найти графически, зная абсциссу X. Если координата X искомой величины лежит за пределами известных значений (X 1 , X 2), то процесс вычисления называется экстраполяция.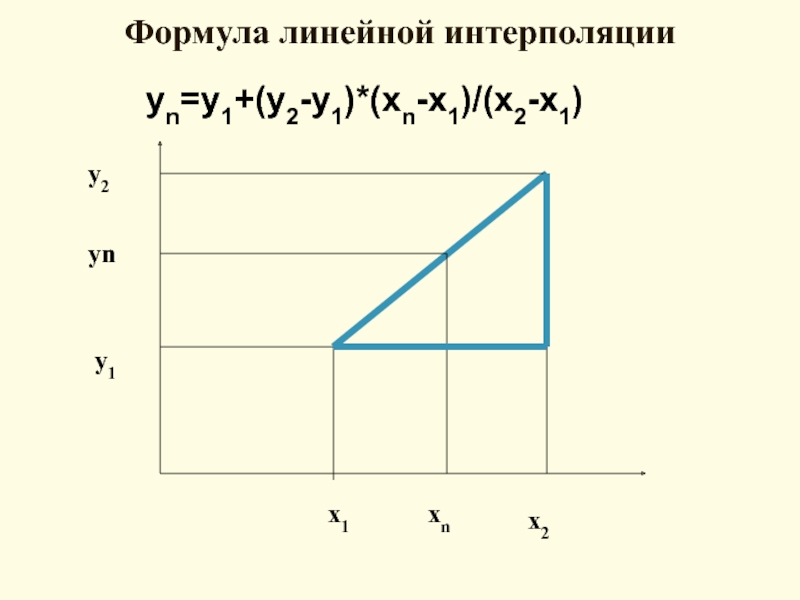
Калькулятор позволяет определить значение ординаты Y искомого значения, зная координаты X и Y двух других функций, а также её абсциссу. Для вычисления необходимо ввести значения заданных двух точек Х 1 , Y 1 и X 2 ,Y 2 , а также указать координату X искомой точки, а сервис автоматически определит метод расчёта и произведёт его.
Формула линейной интерполяции
Для вычисления используется следующая формула:
Пример расчёта
Дано: координаты двух точек А(3;1.5) и B(6;5).
Найти: ординату точки С с абсциссой 4.5.
После этого подставляем значения в указанную формулу:
Y = 5 + (1.5 — 5) / (3 — 6) · (4.5 — 6) = 5 + (-3.5) / (-3) · (-1.5) = 3.25.
Управляющая программа обработки детали представляет собой траекторию движения центра фрезы. Траектория движения состоит из отдельных, соединяющихся друг с другом участков, линейных или дуговых . Точки, которые задают траекторию, называются опорными . В действительности управляющая программа – это последовательный набор опорных точек. Опорные точки могут лежать в плоскости, для их задания используется
две координаты (двух координатная обработка) или в пространстве (объемная трех координатная обработка).
Опорные точки могут лежать в плоскости, для их задания используется
две координаты (двух координатная обработка) или в пространстве (объемная трех координатная обработка).На практике для перемещения инструмента системе ЧПУ не достаточно только опорных точек, необходимо более детальное ее представление. Для расчета промежуточных точек и выдачи команд движения по линейным осям используется специальное вычислительное устройство — интерполятор .
Интерполяторы делятся на линейные и круговые . Линейный интерполятор используется для отработки
прямолинейного движения инструмента. На входе в интерполятор поступает информация о координатах опорных
точек, на выходе для каждой координаты формируется последовательность импульсов необходимых для отработки
заданной геометрии. Линейный интерполятор позволяет отрабатывать только прямолинейные движения. Однако
обеспечить точное соответствие перемещения вдоль заданной прямой достаточно сложно. Итоговая траектория
перемещения приближенно напоминает ломаную линию (рисунок ниже).
Итоговая траектория
перемещения приближенно напоминает ломаную линию (рисунок ниже).
В процессе отработки прямой интерполятор попеременно управляет включением приводов то по оси X , то по оси Y (если прямая лежит в плоскости XY), посылая нужное количество импульсов на привода. На рисунке выше для отработки прямой на ось Y посылается один импульс, а на X — два импульса. Значение d определяет отклонение от заданной геометрии. Т.к. разрешающая способность позволяет задавать один импульс для перемещения на 0.001 мм, то итоговую ломаную кривую можно считать плавной .
Таким образом, линейный интерполятор рассчитывает необходимое количество импульсов по той или иной оси и выдает их на привода.
Программирование линейных перемещений
Чтобы использовать линейный интерполятор (осуществлять программирование линейных перемещений) используется подготовительная функция G01 и указываются координаты конечной точки перемещения с заданной скоростью.
G01 X n.n Yn.n Z n.n Fn.n, где
X, Y, Z – адреса линейных осей;F – скорость перемещения;
Например, для программирования прямолинейного перемещения из точки A в точку B со скоростью 1000 мм/мин необходимо в УП сформировать следующий кадр.
— — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN linear interpolation …
линейная интерполяция — tiesinė interpoliacija statusas T sritis fizika atitikmenys: angl. linear interpolation vok. lineare Interpolation, f rus. линейная интерполяция, f pranc. interpolation linéaire, f … Fizikos terminų žodynas
ЛИНЕЙНАЯ ИНТЕРПОЛЯЦИЯ — способ приближенного вычисления значения функции f(x), основанный на замене функции f(х).линейной функцией параметры аи b к рой выбираются таким образом, чтобы значения L(х).совпадали со значениями f(x).в заданных точках х 1 и х 2: Этим условиям… … Математическая энциклопедия
интерполяция — Вычисление промежуточных значений между двумя известными точками.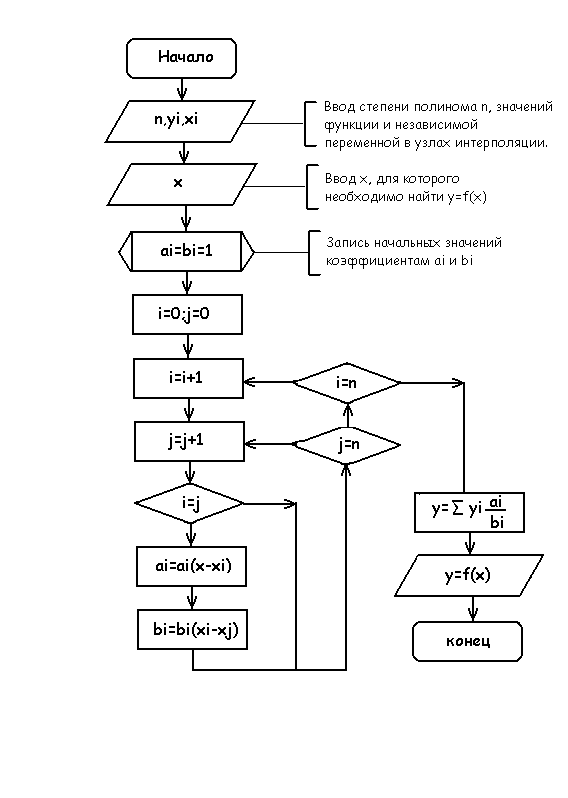 Например: linear линейная интерполяция exponential экспоненциальная интерполяция Процесс вывода цветного изображения, когда пикселы, относящиеся к области между двумя цветными… … Справочник технического переводчика
Например: linear линейная интерполяция exponential экспоненциальная интерполяция Процесс вывода цветного изображения, когда пикселы, относящиеся к области между двумя цветными… … Справочник технического переводчика
интерполяция — и, ж. interpolation f. < лат. interpolatio изменение; переделка, искажение. 1. Вставка позднейшего происхождения в каком л. тексте, не принадлежащая оригиналу. БАС 1. В древних рукописях много интерполяций, внесенных переписчиками. Уш. 1934. 2 … Исторический словарь галлицизмов русского языка
Интерполяция — О функции, см.: Интерполянт. Интерполяция, интерполирование в вычислительной математике способ нахождения промежуточных значений величины по имеющемуся дискретному набору известных значений. Многим из тех, кто сталкивается с научными и… … Википедия
Интерполяция (матем.)
Билинейная интерполяция — Билинейная интерполяция в вычислительной математике расширение линейной интерполяции для функций двух переменных. Ключевая идея заключается в том, чтобы провести обычную линейную интерполяцию сначала в одном направлении, затем в другом … Википедия
Ключевая идея заключается в том, чтобы провести обычную линейную интерполяцию сначала в одном направлении, затем в другом … Википедия
Интерполирование — О функции, см.: Интерполянт. Интерполяция в вычислительной математике способ нахождения промежуточных значений величины по имеющемуся дискретному набору известных значений. Многим из тех, кто сталкивается с научными и инженерными расчётами часто … Википедия
Таблица поиска — (англ. lookup table) это структура данных, обычно массив или ассоциативный массив, используемая с целью заменить вычисления на операцию простого поиска. Увеличение скорости может быть значительным, так как получить данные из памяти… … Википедия
Это глава из книги Билла Джелена .
Задача: некоторые инженерные проблемы проектирования требуют использования таблиц для вычисления значений параметров. Поскольку таблицы являются дискретными, дизайнер использует линейную интерполяцию для получения промежуточного значения параметра. Таблица (рис. 1) включает высоту над землей (управляющий параметр) и скорость ветра (рассчитываемый параметр). Например, если надо найти скорость ветра, соответствующую высоте 47 метров, то следует применить формулу: 130 + (180 – 130) * 7 / (50 – 40) = 165 м/сек.
Таблица (рис. 1) включает высоту над землей (управляющий параметр) и скорость ветра (рассчитываемый параметр). Например, если надо найти скорость ветра, соответствующую высоте 47 метров, то следует применить формулу: 130 + (180 – 130) * 7 / (50 – 40) = 165 м/сек.
Скачать заметку в формате или , примеры в формате
Как быть, если существует два управляющих параметра? Можно ли выполнить вычисления с помощью одной формулы? В таблице (рис. 2) показаны значения давления ветра для различных высот и величин пролета конструкций. Требуется вычислить давление ветра на высоте 25 метров и величине пролета 300 метров.
Решение: проблему решаем путем расширения метода, используемого для случая с одним управляющим параметром. Выполните следующие действия.
Начните с таблицы, изображенной на рис. 2. Добавьте исходные ячейки для высоты и пролета в J1 и J2 соответственно (рис. 3).
Рис. 3. Формулы в ячейках J3:J17 объясняют работу мегаформулы
Для удобства использования формул определите имена (рис. 4).
4).
Проследите за работой формулы последовательно переходя от ячейки J3 к ячейке J17.
Путем обратной последовательной подстановки соберите мегаформулу. Скопируйте текст формулы из ячейки J17 в J19. Замените в формуле ссылку на J15 на значение в ячейке J15: J7+(J8-J7)*J11/J13. И так далее. Получится формула, состоящая из 984 символов, которую невозможно воспринять в таком виде. Вы можете посмотреть на нее в приложенном Excel-файле. Не уверен, что такого рода мегаформулы полезны в использовании.
Резюме: линейная интерполяция используется для получения промежуточного значения параметра, если табличные значения заданы только для границ диапазонов; предложен метод расчета по двум управляющим параметрам.
двойная интерполяция онлайн калькулятор
Вы искали двойная интерполяция онлайн калькулятор? На нашем сайте вы можете получить ответ на любой математический вопрос здесь. Подробное
решение с описанием и пояснениями поможет вам разобраться даже с самой сложной задачей и интерполятор онлайн, не
исключение. Мы поможем вам подготовиться к домашним работам, контрольным, олимпиадам, а так же к поступлению
в вуз.
И какой бы пример, какой бы запрос по математике вы не ввели — у нас уже есть решение.
Например, «двойная интерполяция онлайн калькулятор».
Мы поможем вам подготовиться к домашним работам, контрольным, олимпиадам, а так же к поступлению
в вуз.
И какой бы пример, какой бы запрос по математике вы не ввели — у нас уже есть решение.
Например, «двойная интерполяция онлайн калькулятор».
Применение различных математических задач, калькуляторов, уравнений и функций широко распространено в нашей
жизни. Они используются во многих расчетах, строительстве сооружений и даже спорте. Математику человек
использовал еще в древности и с тех пор их применение только возрастает. Однако сейчас наука не стоит на
месте и мы можем наслаждаться плодами ее деятельности, такими, например, как онлайн-калькулятор, который
может решить задачи, такие, как двойная интерполяция онлайн калькулятор,интерполятор онлайн,интерполяция онлайн двойная онлайн,интерполяция онлайн калькулятор двойная,калькулятор интерполяции онлайн,квадратичная интерполяция онлайн,линейная экстраполяция онлайн,метод интерполяции онлайн,метод интерполяции онлайн калькулятор,метод экстраполяции онлайн калькулятор,онлайн интерполятор,онлайн интерполяция калькулятор,онлайн калькулятор интерполяции,экстраполяция калькулятор онлайн,экстраполяция онлайн калькулятор,экстраполяция онлайн расчет,экстраполяция расчет онлайн. На этой странице вы найдёте калькулятор,
который поможет решить любой вопрос, в том числе и двойная интерполяция онлайн калькулятор. Просто введите задачу в окошко и нажмите
«решить» здесь (например, интерполяция онлайн двойная онлайн).
На этой странице вы найдёте калькулятор,
который поможет решить любой вопрос, в том числе и двойная интерполяция онлайн калькулятор. Просто введите задачу в окошко и нажмите
«решить» здесь (например, интерполяция онлайн двойная онлайн).
Где можно решить любую задачу по математике, а так же двойная интерполяция онлайн калькулятор Онлайн?
Решить задачу двойная интерполяция онлайн калькулятор вы можете на нашем сайте https://pocketteacher.ru. Бесплатный онлайн решатель позволит решить онлайн задачу любой сложности за считанные секунды. Все, что вам необходимо сделать — это просто ввести свои данные в решателе. Так же вы можете посмотреть видео инструкцию и узнать, как правильно ввести вашу задачу на нашем сайте. А если у вас остались вопросы, то вы можете задать их в чате снизу слева на странице калькулятора.
Интерполяционный многочлен Лагранжа (полином Лагранжа)
Этот калькулятор может пригодиться при решении задач на интерполяцию полиномом Лагранжа. В таких задачах обычно требуется интерполировать значение неизвестной функции, соответствующее некоторому значению x, использую формулу интерполяционного многочлена Лагранжа, полученную из известного набора точек со значениями неизвестной функции (x, f(x)).
Калькулятор ниже обладает следующими функциями:
- Он находит формулу полинома Лагранжа для заданного набора точек.
- Он отображает пошаговый вывод формулы.
- Он вычисляет значения интерполяционного многочлена Лагранжа для заданных точек (интерполирует функцию полиномом Лагранжа в заданных точках интерполяции)
- Он отображает набор точек, значения в точках интерполяции, полином Лагранжа и все базисные полиномы на графике.
Как пользоваться
Сначала вводите набор точек — одна точка на строку в форме x f(x), значения разделены пробелом. Если вы хотите получить интерполяцию, вводите значения точек интерполяции в следующее поле в виде значений x, разделенных пробелом.
По умолчанию, калькулятор отображает формулу многочлена и его значения в точках интерполяции. Если нужно пошаговое решение, включите опцию «Показать пошаговое решение». Также можно отключить отображение базисных полиномов.
Теория и формулы, как обычно, описаны под калькулятором.
Интерполяционный многочлен Лагранжа (полином Лагранжа)
0 -1 1 1 4 1Набор точек, одна точка на строку, значения разделяются пробелом
Точность вычисленияЗнаков после запятой: 2
Полином Лагранжа
Файл очень большой, при загрузке и создании может наблюдаться торможение браузера.
Загрузить close
Показать решение по шагамФайл очень большой, при загрузке и создании может наблюдаться торможение браузера.
Загрузить close
Показать базисные полиномыПолином Лагранжа
Файл очень большой, при загрузке и создании может наблюдаться торможение браузера.
Загрузить close
content_copy Ссылка save Сохранить extension Виджет
Интерполяционный многочлен Лагранжа
Предположим, что у нас есть набор значений, соответствующих неизвестной функции, при этом все x различны:
Сконструируем следующий многочлен (называемые многочленом Лагранжа):
где — базисный полином Лагранда
Если посмотреть на формулу базисного полинома для любого j, то видно что для всех точек i не равных j, значение этого полинома обращается в ноль, а в самой точке j значение этого полинома j равно единице. Таким образом,
и
что означает, что полином Лагранжа точно интерполирует значение функции в заданных точках.
Стоит заметить, что формула интерполяционного многочлена Лагранжа подвержена воздействию так называемого феномена Рунге. Феномен Рунге связан к увеличением колебаний полинома на краях интервала при использовании полиномов высоких степеней на равноудаленных друг от друга точках. Таким образом, наличие большого количества точек далеко не всегда приводит к улучшению точности интерполяции.
Однако также стоит заметить, что в отличие от некоторых других формул интерполяции, формула Лагранжа не требует того, чтобы точки в наборе были равноудалены друг от друга. Это используется в некоторых способах борьбы с феноменом Рунге, например, при использовании в качестве точек интерполяции узлов Чебышева.
Калькулятор Интерполяции
Калькулятор онлайн вычисляет линейную экстраполяцию по двум точкам, выводит формулу с подробным решением и графиком
Формула линейной экстраполяции
расчет линейной экстраполяции по двум точкам
Помощь на развитие проекта premierdevelopment.ru
Send mail и мы будем знать, что движемся в правильном направлении.
Спасибо, что не прошели мимо!
I. Порядок действий при расчете линейной экстраполяции онлайн калькулятором:
- Для проведения экстраполяции требуется ввести значения координат 2 точек ([X1, Y1]; [X2, Y2]) и абсциссу (Х) той точки, значение которой необходимо вычислить.
- График справа позволяет визуализировать полученный линейной экстраполяцией результат.
II. Для справки:
интерполяция — способ нахождения промежуточных значений величины по имеющемуся дискретному набору известных значений.линейная интерполяция — нахождение промежуточного значения функции по двум точкам (условно проведя прямую между ними).квадратичная интерполяция — нахождение промежуточного значения функции по трем точкам (интерполирующая функция многочлен второго порядка – парабола).экстраполяция — способ нахождения значений функции по уже известным нескольким ее значениям.
ФорумСпециалистыО насСсылка для цитирования в списке литературы: CAE-CUBE: [Электронный ресурс]. URL: https://premierdevelopment.ru/ (дата обращения ) | premierdevelopment.ru, все права защищены, 2015 - 2021 e-mail: Этот адрес электронной почты защищён от спам-ботов. У вас должен быть включен JavaScript для просмотра. |
Линейная интерполяция
Простейшим случаем интерполяции является “линейная”, то есть нахождение величины по двум заданным точкам. Данный процесс вычисления можно рассмотреть как линейную функцию, тем самым делая расчёт более наглядным. Нанесение функции на систему координат называют аппроксимацией. Для этого на оси координат необходимо провести прямую через известные точки. Логично, что искомое значение, находящееся между первыми двумя точками, можно найти графически, зная абсциссу X. Если координата X искомой величины лежит за пределами известных значений (X1, X2), то процесс вычисления называется экстраполяция.
Калькулятор позволяет определить значение ординаты Y искомого значения, зная координаты X и Y двух других функций, а также её абсциссу. Для вычисления необходимо ввести значения заданных двух точек Х1, Y1 и X2,Y2, а также указать координату X искомой точки, а сервис автоматически определит метод расчёта и произведёт его.
Информация
Такие науки, как статистика и математика, используют в своей методологии инструмент «Интерполяция». Он используется инженерии и архитектурном проектировании.
Интерполяция применима в следующих случаях:
- Явление было изучено со всесторонне, а не одним путем определенного исчисления.
- Применение данного инструмента возможно только в случаях, когда допускается изменение погрешности, между проверенными точками, которое также подчиняется конкретному закону.
- Применение может быть оправдано не во всех случаях, так как при эмпирических функциях может возникнуть ряд других нюансов.
Так или иначе, применяя метод линейной интерполяции, допущение ошибок при расчетах недопустимо. Для того, чтобы обезопасить специалистов от возникновения ошибок по причине допущения просчета, мы разработали калькулятор линейной интерполяции онлайн. Благодаря этому инструменту теперь есть возможность избежать допущения каких-либо ошибок, поскольку калькулятор имеет предельную точность в расчетах.
Линейная интерполяция онлайн:
- Обезопасить себя от допущения ошибок, которые в случаях со строительством жилых зданий могут приводить к ужасным последствиям.
- Избавить себя от необходимости самостоятельного расчета формулы и просто ввести необходимые значения в соответствующие поля и получить готовый ответ.
- Метод линейной интерполяции покажется очень простым, благодаря интерфейсу нашего калькулятора.
Наш калькулятор, осуществляя расчет методом линейной интерполяции, использует следующую формулу:
Y = y1+(x-x1)/(x2-x1)*(y2-y1),
где y – показатель линейной интерполяции,
y1, y2, x, x1, x2 – известные значения, которые необходимо вставить в поля калькулятора.
Таким образом, используя наш онлайн калькулятор, Вы получите точный ответ, легко разберетесь в функционале калькулятора, благодаря простому интерфейсу, и никогда не допустите ошибки по причине человеческого фактора.
Использование экстраполяции
В отличие от интерполяции, задачей которой является нахождения значения функции между двумя известными аргументами, экстраполяция подразумевает поиск решения за пределами известной области. Именно поэтому данный метод столь востребован для прогнозирования.
В Экселе можно применять экстраполяцию, как для табличных значений, так и для графиков.
Способ 1: экстраполяция для табличных данных
Прежде всего, применим метод экстраполяции к содержимому табличного диапазона. Для примера возьмем таблицу, в которой имеется ряд аргументов (X) от 5 до 50 и ряд соответствующих им значений функции (f(x)). Нам нужно найти значение функции для аргумента 55, который находится за пределом указанного массива данных. Для этих целей используем функцию ПРЕДСКАЗ.
- Выделяем ячейку, в которой будет отображаться результат проведенных вычислений. Кликаем по значку «Вставить функцию», который размещен у строки формул.
Запускается окно Мастера функций. Выполняем переход в категорию «Статистические» или «Полный алфавитный перечень». В открывшемся списке производим поиск наименования «ПРЕДСКАЗ». Найдя его, выделяем, а затем щелкаем по кнопке «OK» в нижней части окна.
Мы перемещаемся к окну аргументов вышеуказанной функции. Она имеет всего три аргумента и соответствующее количество полей для их внесения.
В поле «X» следует указать значение аргумента, функцию от которого нам следует вычислить. Можно просто вбить с клавиатуры нужное число, а можно указать координаты ячейки, если аргумент записан на листе. Второй вариант даже предпочтительнее. Если мы произведем внесение именно таким способом, то для того, чтобы просмотреть значение функции для другого аргумента нам не придется менять формулу, а достаточно будет изменить вводную в соответствующей ячейке. Для того, чтобы указать координаты этой ячейки, если был выбран все-таки второй вариант, достаточно установить курсор в соответствующее поле и выделить эту ячейку. Её адрес тут же отобразится в окне аргументов.
В поле «Известные значения y» следует указать весь имеющийся у нас диапазон значений функции. Он отображается в колонке «f(x)». Следовательно, устанавливаем курсор в соответствующее поле и выделяем всю эту колонку без её наименования.
В поле «Известные значения x» следует указать все значения аргумента, которым соответствуют внесенные нами выше значения функции. Эти данные находятся в столбце «x». Точно так же, как и в предыдущий раз выделяем нужную нам колонку, предварительно установив курсор в поле окна аргументов.
После того, как все данные внесены, жмем на кнопку «OK».
После этих действий результат вычисления путем экстраполяции будет выведен в ячейку, которая была выделена в первом пункте данной инструкции перед запуском Мастера функций. В данном случае значение функции для аргумента 55 равно 338.
Если все-таки был выбран вариант с добавлением ссылки на ячейку, в которой содержится искомый аргумент, то мы легко сможем его поменять и просмотреть значение функции для любого другого числа. Например, искомое значение для аргумента 85 буде равно 518.
Урок: Мастер функций в Excel
Способ 2: экстраполяция для графика
Выполнить процедуру экстраполяции для графика можно путем построения линии тренда.
- Прежде всего, строим сам график. Для этого курсором при зажатой левой кнопке мыши выделяем всю область таблицы, включая аргументы и соответствующие значения функции. Затем, переместившись во вкладку «Вставка», кликаем по кнопке «График». Этот значок расположен в блоке «Диаграммы» на ленте инструментов. Появляется перечень доступных вариантов графиков. Выбираем наиболее подходящий из них на свое усмотрение.
После того, как график построен, удаляем из него дополнительную линию аргумента, выделив её и нажав на кнопку Delete на клавиатуре компьютера.
Далее нам нужно поменять деления горизонтальной шкалы, так как в ней отображаются не значения аргументов, как нам того нужно. Для этого, кликаем правой кнопкой мыши по диаграмме и в появившемся списке останавливаемся на значении «Выбрать данные».
В запустившемся окне выбора источника данных кликаем по кнопке «Изменить» в блоке редактирования подписи горизонтальной оси.
Открывается окно установки подписи оси. Ставим курсор в поле данного окна, а затем выделяем все данные столбца «X» без его наименования. Затем жмем на кнопку «OK».
После возврата к окну выбора источника данных повторяем ту же процедуру, то есть, жмем на кнопку «OK».
Теперь наш график подготовлен и можно, непосредственно, приступать к построению линии тренда. Кликаем по графику, после чего на ленте активируется дополнительный набор вкладок – «Работа с диаграммами». Перемещаемся во вкладку «Макет» и жмем на кнопку «Линия тренда» в блоке «Анализ». Кликаем по пункту «Линейное приближение» или «Экспоненциальное приближение».
Линия тренда добавлена, но она полностью находится под линией самого графика, так как мы не указали значение аргумента, к которому она должна стремиться. Чтобы это сделать опять последовательно кликаем по кнопке «Линия тренда», но теперь выбираем пункт «Дополнительные параметры линии тренда».
Запускается окно формата линии тренда. В разделе «Параметры линии тренда» есть блок настроек «Прогноз». Как и в предыдущем способе, давайте для экстраполяции возьмем аргумент 55. Как видим, пока что график имеет длину до аргумента 50 включительно. Получается, нам нужно будет его продлить ещё на 5 единиц. На горизонтальной оси видно, что 5 единиц равно одному делению. Значит это один период. В поле «Вперед на» вписываем значение «1». Жмем на кнопку «Закрыть» в нижнем правом углу окна.
Как видим, график был продлен на указанную длину с помощью линии тренда.
Урок: Как построить линию тренда в Excel
Итак, мы рассмотрели простейшие примеры экстраполяции для таблиц и для графиков. В первом случае используется функция ПРЕДСКАЗ, а во втором – линия тренда. Но на основе этих примеров можно решать и гораздо более сложные задачи прогнозирования.
Мы рады, что смогли помочь Вам в решении проблемы. Опишите, что у вас не получилось.Наши специалисты постараются ответить максимально быстро.
Помогла ли вам эта статья?
ДА НЕТ
Поделиться статьей в социальных сетях:
Еще статьи по данной теме:
Линейная регрессия
Уравнение регрессии:
Коэффициент a:
Коэффициент b:
Коэффициент линейной парной корреляции:
Коэффициент детерминации:
Средняя ошибка аппроксимации:
Что такое линейная интерполяция в математике?
интерполяция калькулятор – это метод создания новых точек данных в уже известном дискретном наборе точек данных. В этой математической процедуре некоторые исходные точки данных могут быть интерполированы для создания простой и новой функции, которая будет близка к исходным данным. Эта интеграция нового значения называется интерполяцией. Другими словами, мы также можем сказать, что линейный интерполянт – это прямая линия, которая существует между двумя распознанными координатными точками (x0, y0) и (x1, y1). Вы можете легко найти значение интерполяции между двумя координатами на прямой с помощью калькулятор интерполяции.
Формула линейной интерполяции:
Формула линейной интерполяции:
$$ y = y1 + ((x – x1) / (x2 – x1)) * (y2 – y1) $$
В этом уравнении интерполяции:
- X = известное значение,
- y = неизвестное значение,
- x1 и y1 = координаты, которые ниже известного значения x
- x2 и y2 = координаты выше значения x.
Кроме того, интерполяция онлайн калькулятор уклона помогает найти точки уклона или уклона A (x1, y1) и B (y1, y2) в декартовой координатной плоскости.
Пример1:
Если заданными точками данных являются (2, 4) и (6, 8), как вы рассчитаете значение y, когда x = 2.
На первом этапе мы извлечем координаты заданных точек данных.
$$ x1 = 2 $$
$$ y1 = 4 $$
$$ x2 = 6 $$
$$ y2 = 8 $$
На втором этапе мы возьмем следующие уравнения, чтобы получить значения m, а затем y
- (m = y2 – y1 / x2 − x1 ) = уравнение 1
- (y = y1 + m * (x – x1) ) = уравнение 2
- Чтобы вычислить значение m, поместите значения в уравнение 1, (= m = 8−4 / 6−2 = 1 )
- Теперь у нас есть значение m, поэтому мы воспользуемся уравнением 2, чтобы найти значение y. 2 ) в заданной строке, пока заданные данные
«$$ x1 = 4, y1 = 6, x2 = 8, x3 = 12, y3 = 14 $$».
Решение:
Поскольку у нас есть линейное интерполяционное уравнение:
$$ y_2 = (x_2 – x_1) x (y_3- y_1) / (x_3 – x_1) + y_1 $$
Пошаговое решение для нахождения y2 будет таким, как если бы вышеприведенное уравнение было следующим:
$$ y_2 = (x_3 − x_2) x (y_3 − y_1) / (x_3 − x_2) + y_3 $$
$$ y_2 = (12−8) x (14−6) / (12−8) + 14 $$
$$ y_2 = (4) x (8) / (4) + 14 $$
$$ y_2 = (32) / (4) + 14 $$
$$ y_2 = 8 + 14 $$
$$ y_2 = 22 $$
Формула линейной интерполяции
Для вычисления используется следующая формула:
Часто задаваемые вопросы (FAQ):
Какой метод можно использовать в любом вопросе интерполяции?
Обычно мы используем метод интерполяции калькулятор полиномов. Причины использования полиномов:
- Их легко оценить
- Дифференциация и интеграция просты.
Это называется полиномиальной интерполяцией.
Когда следует использовать интерполяцию?
Как мы уже знаем, с помощью интерполяции мы можем найти неизвестные точки, поэтому ее можно использовать всякий раз, когда нам нужно предсказать неизвестные значения для любых данных географических точек. Это полезно для прогнозирования осадков, полученных в результате концентраций химических веществ, оценки уровней шума и т. Д.
Какой метод интерполяции лучший?
Интерполяция с обратным взвешиванием по расстоянию (IDW) считается одним из лучших методов для достижения лучших результатов, чем любой другой метод интерполяции калькулятор.
Кригинг – это точная интерполяция?
Методика интерполяция калькулятор обычно связана с точной интерполяцией. Все предсказания Кригинга могут постепенно меняться в космосе. Они будут меняться после того, как попадут в место, где были собраны данные. В этот момент происходит «скачок» прогноза к наиболее точному значению, которое было измерено первым. Однако для быстрых и точных прогнозов можно использовать интерполятор.
Пример расчёта
Дано: координаты двух точек А(3;1.5) и B(6;5).
Найти: ординату точки С с абсциссой 4.5.Для удобства рекомендуется построить график: нанести точки на систему координат и провести прямую.
После этого подставляем значения в указанную формулу:
Y = 5 + (1.5 – 5) / (3 – 6) · (4.5 – 6) = 5 + (-3.5) / (-3) · (-1.5) = 3.25.
интерполяция онлайн калькулятор момент:
Благодаря калькулятор интерполяции линейной для поиска неизвестной точки данных для заданных координат и построения точки на графиках. Кроме того, этот инструмент показывает формулу, которая используется для выполнения требований, с пошаговыми расчетами для облегчения конечных пользователей в кратчайшие сроки. Он обеспечивает бесплатную поддержку в учебных и образовательных целях. Поэтому давайте интерполяция калькулятор найти ответ, поместив известную точку данных в этот интерполятор!
Other Languages: Linear Interpolation Calculator, Kalkulator Interpolasi, Interpolacja Kalkulator, Interpolation Rechner, Interpolasyon Hesaplama, 補間計算, Calculadora De Interpolação, Calcul Interpolation Linéaire, Interpolar Calculadora, Calcolo Interpolazione Lineare, Lineární Interpolace Výpočet, حاسبة الاستيفاء, Interpolointi Laskin.
Линейная интерполяция
Линейная интерполяция — интерполяция алгебраическим двучленом P 1 = ax + b функции f, заданной в двух точках x 0 и x 1 отрезка. В случае, если заданы значения в нескольких точках, функция заменяется кусочно-линейной функцией.
1. Геометрическая интерпретация
Геометрически это означает замену графика функции f {\displaystyle f} прямой, проходящей через точки x 0, f x 0) {\displaystyle x_{0},fx_{0})} и x 1, f x 1) {\displaystyle x_{1},fx_{1})}.
Уравнение такой прямой имеет вид:
y − f x 0 f x 1 − f x 0 = x − x 0 x 1 − x 0 {\displaystyle {\frac {y-fx_{0}}{fx_{1}-fx_{0}}}={\frac {x-x_{0}}{x_{1}-x_{0}}}}
отсюда для x ∈ }|fx|,\quad h=x_{1}-x_{0}.{-1}{\begin{pmatrix}x\\y\\z\\1\\\end{pmatrix}}}3. Применение
Линейная интерполяция применяется для уплотнения таблиц.
Формула линейной интерполяции является частным случаем интерполяционной формулы Лагранжа и интерполяционной формулы Ньютона.- Термин интерполяция впервые употребил Джон Валлис в своём трактате Арифметика бесконечных 1656 В функциональном анализе интерполяция линейных операторов
- Билинейная интерполяция — в вычислительной математике — обобщение линейной интерполяции одной переменной для функций двух переменных. Обобщение основано
- Интерполяция линейных операторов — направление функционального анализа. рассматривающее банаховы пространства как элементы некоторой категории. Общая
- основой для множества других работ. Способы интерполяции Интерполяция методом ближайшего соседа. Линейная интерполяция Интерполяционная формула Ньютона Метод
- общественном достоянии англ. Интерполяция методом ближайшего соседа Линейная интерполяция Билинейная интерполяция Бикубическая интерполяция Кубический сплайн
- Бикубическая интерполяция — в вычислительной математике расширение кубической интерполяции на случай функции двух переменных, значения которой заданы
- О способе нахождения промежуточных значений см. Интерполяция Интерполянт или интерполирующая функция — в вычислительной математике это функция, которая
- ячейке. Для улучшения качества получаемой изолинии применяется линейная интерполяция В таком случае конец сегмента изолинии на ребре квадрата делит
- диапазона, чтобы аппроксимация больше походила на реальную кривую см. также Интерполяция Пример таблицы синусов на языке программирования C 8 — битная таблица
- апроксимированное эмпирическое правило, которое гласит, что существует линейная зависимость при постоянной температуре между свойствами кристаллической
- концентраций, превышающих ПДК. Оценочный бал рассчитывается как результат линейной интерполяции по следующим диапазонам: Среднее значение кратности превышения ПДК
- имеющимся. Идеальная интерполяция позволяет точно восстановить значения сигнала в промежуточных отсчётах. Стандартный алгоритм интерполяции сигнала с целым
- символы или, например, от 1 до 26 только латинский алфавит и т. д. Интерполяция может производиться на основе функции, аппроксимирующей распределение
- ISBN 978 — 5 — 8459 — 1524 — 5, ДИАЛЕКТИКА 2009 Крейн С. Г., Петунин Ю. И., Семенов Е. М. Интерполяция линейных операторов — М.: Наука, 1978 — 400 с.
- соросовский профессор. Крейн С. Г., Петунин Ю. И., Семёнов Е. М. Интерполяция линейных операторов — М.: Наука, 1978 — 400 с. Воспоминания Татьяны Крейн:
- Монте — Карло Алгоритм имитации отжига Обыкновенные дифференциальные уравнения Интерполяция Численное дифференцирование Разложение по полиномам Чебышёва Суммирование
- Интерактивное введение в сплайны Интерактивный расчет сплайна с помощью Mathcad Maple Application Server неактивна Сплайновая интерполяция неактивна
- 3D графики, анимация Линейная алгебра, разреженные матрицы sparse matrices Полиномиальные и рациональные функции Интерполяция аппроксимация Симуляция:
- предположениях кригинг дает наилучшее линейное несмещенное предсказание промежуточных значений. Методы интерполяции основанные на других критериях, таких
- И. Мальцева 2009 — за серию научных работ Неявная определимость и интерполяция в неклассических логиках премия Правительства РФ в области образования
- с. 19. Крейн, 1978, с. 9. Крейн, 1978, с. 28. Крейн С. Г., Петунин Ю. И., Семенов Е. М. Интерполяция линейных операторов — М.: Наука, 1978 — 400 с.
- аппроксимировала функцию 1 z параболической интерполяцией и такая интерполяция по качеству превосходила кусочно — линейную использовавшуюся в решениях конкурентов
- методах функция представлена линейной комбинацией элементов. При этом дискретная функция также может рассматриваться как линейная комбинация полиномов. Прямые
- усиления эффекта антиалиасинга: Интерполяция методом ближайшего соседа Билинейная интерполяция Бикубическая интерполяция Реконструкционные фильтры также
- телеэкрану сверху вниз. Для разрешения конфликта систем применяется интерполяция кадровой частоты. При этом происходит преобразование, называемое профессионалами
- первый программный код, доказывающий, что линейная масштабируемость от числа неизвестных в системе линейных уравнений может быть достигнута без привлечения
- за прошлые дни, скорректированные с учётом изменения рынка или линейная интерполяция ставок по заключённым сделкам на другие сроки уровень 3 — экспертная
- куба, на котором она лежала изначально. Позиция вычисляется путём линейной интерполяции значений скалярного поля в концах ребра. Заранее вычисленный массив
- collections. Геометрия является линейной в том смысле, что границы неявно определяются путем линейной интерполяции между вершинами. Геометрия вложена
- interpolate Инструменты для интерполяции io Ввод — вывод данных. lib Работа со сторонними библиотеками. linalg Линейная алгебра. misc Разное. optimize
Линейная интерполяция: линейная интерполяция формула, линейная интерполяция пример решения, линейная интерполяция в excel, линейная интерполяция с++, линейная интерполяция для чайников, нелинейная интерполяция, линейная интерполяция формула пример, линейная интерполяция чпу
Линейная интерполяция для чайников.
Н.В. Байдакова. Линейная интерполяция на тетраэдре С. 80 84. Текст научной работы на тему Оптимальная линейная интерполяция с условием на алгоритм. а 0 а min 1.1, 0 т при т 1 должно быть b0. Линейная интерполяция с. Линейная интерполяция онлайн калькулятор. Линейная интерполяция. В данном разделе мы рассмотрим самый простой метод нахождения линейной интерполяции таблично заданной функции. Линейная интерполяция чпу. Interp NumPy PyProg.x.y.y, dt увеличиваю y. Интерполяция function linearInterpolation x0,x1,y0,y1,x return x.
Линейная интерполяция формула.
ЧПУ. Линейная интерполяция. Где y – показатель линейной интерполяции. y1, y2, x, x1, x2 – известные значения, которые необходимо вставить в поля калькулятора. Таким образом,. Линейная интерполяция в excel. Фасад.РУ Линейная интерполяция. Воспользуйтесь нашим удобным онлайн расчетом линейной интерполяции. Так же имеются другие виды расчетов интерполяции.
Интерполяция и функции предсказания Руководство.
Интерполяция линейная логарифмическая шкала С. Программирование, C, Алгоритмы. Понадобилось мне как то сделать. ЛИНЕЙНАЯ ИНТЕРПОЛЯЦИЯ Математический справочник. ЛИНЕЙНАЯ ИНТЕРПОЛЯЦИЯ. ЛИНЕЙНАЯ ИНТЕРПОЛЯЦИЯ приближенное вычисление значений функции для внутренних точек отрезка по. Линейная интерполяция ru. Линейная интерполяция дает ошибку при определенных входных значениях между 70% и 80%. У меня есть очень специфическая проблема excel. Линейная интерполяция Аппаратная платформа Arduino. Билинейная интерполяция. Билинейной интерполяцией называют расширение линейной.
Линейная интерполяция – G01 Планета CAM.
Линейная интерполяция на евклидовом шаре в Rⁿ. совокупность многочленов от n переменных степени ≤1, то есть линейных функций на Rn. Линейная интерполяция дает ошибку при определенных. Синонимы к словосочетанию ЛИНЕЙНАЯ ИНТЕРПОЛЯЦИЯ: линейная функция, линейное преобразование, полная линейная группа, линейная. МЕТОДЫ ИНТЕРПОЛЯЦИИ И АППРОКСИМАЦИИ. Глава 6. Обработка экспериментальных данных. 6.1 Линейная интерполяция. Встроенные функции MathCAD позволяют при интерполяции проводить. Линейная интерполяция. Линейная интерполяция. Самый простой вид интерполяции линейная, которая представляет искомую зависимость y x в виде ломаной линии.
Определение промежуточного значения методом линейной.
Приведенная ниже формула Microsoft Excel выполняет линейную Чтобы создать пример линейной формулы интерполяции,. Линейная интерполяция Пусть есть неизвестная функция. Линейная интерполяция продолжение листинга 13.1. Для построения линейной интерполяции служит встроенная функция linterp листинг 13.1. 3. Интерполяция Численные методы. В простейших случаях эта задача может быть решена путем линейной интерполяции. Линейная интерполяция опирается на предположение, что в.
ЛИНЕЙНО ИНТЕРПОЛИРОВАННОЕ ВЕКТОРНОЕ ПОЛЕ И.
Линейная и квадратичная интерполяция. Постановка задачи аппроксимации функций. Постановка задачи: требуется приближенно заменить. Линейная интерполяция Gravbiz настольные гравировальные. Пусть координаты первой точки линейной функции Х0, Y0, второй Х1, Y1. Прямая между этими точками представляет собой линейную интерполяцию. Интерполяция Loginom. Н.В. Байдакова. Линейная интерполяция на тетраэдре С. 80 84. Опубликовано пт, 30 11 2018 пользователем sez. Том 24, номер 4, 2018.
Линейная интерполяция m.
В этом случае на помощь приходит метод линейной интерполяции, который помогает найти промежуточные значения. Он достаточно. Линейная интерполяция онлайн с решением и графиком. Доброго времени суток! Нужно выполнить линейную интерполяцию экстраполяцию данных. Для решения сей задачи, в связи с. 3.2 Линейная интерполяция:. 2.8. Рис. 2.8. Линейная и сплайновая интерполяция. Формула линейной интерполяции. Графически это означает простое соединение. Линейная интерполяция Языки программирования Life Prog. Сервис интерполяции и экстраполяции онлайн линейная интерполяция экстраполяция поможет вам вычислить значение линейной функции, имея в.
Линейная интерполяция на евклидовом шаре в Rⁿ Невский.
Линейная интерполяция, формально примененная к паре величин Рост – Вес, показана на рис. 2. Были взяты данные двух студентов маленький. Синонимы к словосочетанию ЛИНЕЙНАЯ ИНТЕРПОЛЯЦИЯ. Онлайн калькулятор показывает значение, полученное линейной интерполяцией и формулы, по которым проводилось вычисление. Формулы удобно. Интерполяция функций двух переменных, проблема выбора узлов. ИП Кто? Что? линейная интерполяция, линейные интерполяции. РП Кого? Чего? линейной интерполяции, линейных интерполяций. ДП Кому? Чему. Линейная интерполяция величины по нескольким параметрам. §5. Программирование ЧПУ. Линейная интерполяция. 30.12.2012. Управляющая программа обработки детали представляет собой траекторию. Лекция Интерполяция функций НОУ ИНТУИТ. Эти величины, в свою очередь, находятся путём линейной интерполяции по таблицам СП 23 102 2003 Естественное освещение. Линейная интерполяция Онлайн калькулятор. Линейная интерполяция используется для получения промежуточного значения параметра предложен метод расчета по двум.
Линейная интерполяция функции.
Линейная интерполяция. Самый простой вид интерполяции – кусочно постоянная. Ее смысл состоит в том, что на каждом промежутке между. Линейная интерполяция Центр дистанционного обучения. При линейной интерполяции Mathcad соединяет существующие точки данных прямыми линиями. Это выполняется функцией linterp, описанной ниже. ЛИНЕЙНАЯ ИНТЕРПОЛЯЦИЯ это Что такое ЛИНЕЙНАЯ. В математике линейная интерполяция метод установки кривой, используя линейные полиномиалы. Линейная интерполяция между двумя известными. Метод вычисления значения шага интерполяции в Excel. Рассматривается задача алгебраической интерполяции. Простейший способ интерполяции кусочно линейная, требующая.
Линейная интерполяция склонение и спряжение Промт.
Наиболее простым методом является линейная интерполяция, когда предполагается, что промежуточные точки лежат на прямых, соединяющих ее. Линейная и билинейная интерполяция. Код G01 предназначен для выполнения линейной интерполяции, или, говоря простым языком, для перемещения инструмента по прямой линии с. Интерполяция, экстраполяция и сглаживание. Кусочно линейная интерполяция. При решении ряда задач требуется восстановить функцию y f x для произвольного значения x на отрезке, если. 13.1.1. Линейная интерполяция MathCAD 12 руководство. Линейная интерполяция. После заполнения всех значений результат вычисляется автоматически. Плоская задача 2D.
Линейная интерполяция для рассчета траектории движения.
В статье рассматривается линейная интерполяция двумерного векторного поля, которая получается по трем значениям в вершинах единичного. Н. В. Байдакова, Линейная интерполяция на тетраэдре, Тр. Линейной интерполяции, поэтому продолжим вычисления далее. Также заметим, что исходные данные избыточны, т.к. достаточно было указать только.
Линейная интерполяция Тепломассообмен.
Линейная интерполяция Matlab. Не будем вдаваться в математические определения и термины, перейдём сразу к сути: Алгоритм. Постановка задачи. Кусочно линейная интерполяция. Считаем методом интерполяции. y y1 x x1 x2 x1 y2 y1. y 130 133.
линейная интерполяция пример решения, линейная интерполяция формула пример
Дата публикации:
05-16-2020Дата последнего обновления:
05-16-2020Калькулятор и формула линейной интерполяции — [100% бесплатно]
Используйте этот калькулятор линейной интерполяции для поиска точек на заданной линии. Вы можете определить значение либо с помощью формы пересечения уклона, либо с помощью двух координат. В этой статье вы узнаете, как пользоваться калькулятором, и прочую информацию о линейной интерполяции. Читайте дальше, чтобы узнать больше.
Как пользоваться калькулятором линейной интерполяции?
Этот очень простой калькулятор интерполяции служит удобным инструментом, когда вам нужно найти нужные значения.Вместо того, чтобы решать вручную с использованием формулы линейной интерполяции, этот калькулятор намного проще и мгновенно предоставляет вам результаты. Вот шаги, которые необходимо выполнить для этого онлайн-инструмента:
- Сначала введите значения x1 и y1 .
- Затем введите значения x2 и y2 .
- Наконец, введите значения x3 и y3 .
- После ввода всех требуемых значений калькулятор линейной интерполяции автоматически генерирует для вас значения m и b с учетом формы пересечения наклона формулы:
y = mx + b.
- Под этими значениями вы также можете увидеть всю формулу с уже подставленными в нее значениями. Это дает вам хорошую справочную информацию о том, как записать формулу вместе с необходимыми значениями.
Что такое метод интерполяции?
Метод интерполяции относится к статистическому методу, с помощью которого вы используете связанные известные значения для получения оценки неизвестной потенциальной доходности или цены данной ценной бумаги. Вы можете достичь этого метода, используя другие известные значения, связанные с ним, которые идут последовательно с неизвестными значениями.
По сути, интерполяция — это простое математическое понятие. Если вы заметили тенденцию в наборе точек данных, которая в целом согласована, вы можете дать разумную оценку ценности набора данных даже в тех точках, которые вы еще не рассчитали. Конечно, это в лучшем случае лишь оценка. Проблема с интерполяторами в том, что вы никогда не можете полностью доверять их оценкам.
Есть разные виды интерполяции, с которыми вы можете работать.К ним относятся полиномиальная интерполяция, кусочно-постоянная интерполяция и линейная интерполяция. Среди всех этих методов наиболее распространенным и простым является линейная интерполяция. Для этого метода вы можете использовать уравнение линейной интерполяции или калькулятор линейной интерполяции, что намного удобнее.
Это очень полезно, когда вы пытаетесь оценить стоимость процентной ставки или ценной бумаги для определенной точки, по которой нет доступных данных.Не путайте интерполяцию с экстраполяцией. Последнее относится к методу, с помощью которого вы можете получить оценку для точки данных за пределами известного диапазона данных.
Часто графики, которые представляют историю акций, широко интерполируются. Они используют линейную регрессию для создания кривых, которые приблизительно соответствуют колебаниям цены ценной бумаги. Даже если диаграмма, которая измеряет акции в течение года, включает точки данных за каждый день, невозможно с полной уверенностью сказать, где бы стоимость акций была оценена в данный момент времени.
Хотя это определение сначала может сбивать с толку, на самом деле концепция интерполяции относительно проста. Человеческие цивилизации веками использовали интерполяцию, особенно ранними месопотамскими астрономами, а также астрономами из Малой Азии, когда они пытались заполнить пробелы.
Хотя несколько факторов влияют на движения планетных тел, они все же лучше подходят для неточной интерполяции по сравнению с колебаниями запасов, которые очень непредсказуемы.Тем не менее, с учетом огромного количества данных, используемых для анализа ценных бумаг, довольно сложно избежать интерполяции с точки зрения движения цен.
Что такое формула линейной интерполяции?
Хотя использовать этот калькулятор линейной интерполяции проще, вы все равно можете выполнить вычисления вручную, используя уравнение линейной интерполяции. Для этого представьте, что вам нужно измерить зависимость между тем, сколько муки вам нужно и сколько печенья вы хотите испечь.
В первый раз, когда вы испекли партию печенья, вы использовали 200 граммов муки и в итоге получили 15 печений. Во второй раз, когда вы испекли партию печенья, вы использовали 300 граммов муки и в итоге получили 20 печений. Теперь вы хотите знать, сколько печенья вы получите, если использовать 250 граммов муки.
Предположим, что эта ситуация имеет линейную зависимость, поэтому вы можете найти решение для линейной интерполяции. Если вам нужно найти значение, выходящее за пределы уже протестированного вами диапазона, это относится к экстраполяции. Но если вы хотите найти решение для линейной интерполяции, используйте формулу линейной интерполяции:
y = (x — x₁) * (y₂ — y₁) / (x₂ — x₁) + y₁
где:
(x₁, y₁) относятся к координатам 1-й известной точки данных
(x₂, y₂) относятся к координатам 2-й первой известной точки данных
(x, y) относятся к координаты точки, которую вы решаете дляЭта формула в точности совпадает с формулой экстраполяции.Помните, что экстраполяция часто дает результат, не подтвержденный никакими экспериментальными данными. Вот почему рекомендуется использовать интерполяцию.
Что такое квадратичная интерполяция?
Мы можем лучше всего определить квадратичную интерполяцию с помощью формулы. Если бы у вас была таблица значений
yi = f (xi), 0≤i≤2n
На каждом из интервалов [x2j, x2j + 2], 0≤j≤n − 1 , вы должны использовать квадратичный интерполирующий полином на интервале для интерполяции данных.
Как сделать линейную интерполяцию в Excel?
Интерполяция — это метод, который можно использовать для определения фактора будущей или текущей стоимости, когда точное значение не отображается в таблице значений. Интерполяция предполагает, что любое изменение между двумя заданными значениями линейно с незначительной погрешностью.
Помимо использования калькулятора интерполяции, вы также можете выполнить линейную интерполяцию в Excel. Для этого вам необходимо ввести специальную формулу, которая выполняет метод линейной интерполяции, вычисляя значение шага интерполяции. Используемая формула Excel:
= (конец-начало) / (СТРОКА (конец) -СТРОКА (начало))
где:
конец относится к адресу большего ячейка номера
начало относится к адресу ячейки меньшего числаКалькулятор интерполяции — Calculator Academy
Введите две точки вдоль линии (X1, Y1) (X2, Y2), а также конечную координату X (X3) для интерполяции конечной позиции Y этой точки.Линейная интерполяция использует известные координаты и наклон для вычисления неизвестной точки.
Формула интерполяции
Следующая формула используется для вычисления линейной интерполяции.
y3 = y1 + (X3-X1) * {(y2-y1) / (x2-x1)}
- Где Y3 — отсутствующее значение интерполяции
- X3, X2, X1 — точки координат
- Y2, Y1 — известные точки координат
Определение линейной интерполяции
Интерполяция определяется как экстраполяция данных с использованием прошлых данных.Например, в отношении акций вы можете сказать, что цена выросла на 10% за последний год, поэтому вы собираетесь экстраполировать, что акции вырастут на 10% и в следующем году. На самом деле это может быть неправдой, но это пример использования прошлых данных для интерполяции.
Линейная интерполяция конкретно относится к экстраполяции данных по линейной линии. Например, предположим, что у вас есть 2 точки (X1, Y1) (X2, Y2). Эти две точки представляют собой линию. Теперь предположим, что вы хотите продлить эту линию до новой точки, скажем, X3.Вы можете вычислить значение Y3, умножив наклон этой линии на X3, или, другими словами, Y3 = slope * X3, где наклон равен (X2-X1) / (Y2-Y1). Это пример линейной интерполяции.
Как видите, вы можете интерполировать точку данных Y3 или X3, изменив уравнение. Если у вас есть наклон линии и две точки вдоль этой линии, вы можете определить конечный пункт назначения любой точки по координате X или Y.
Как выполнить линейную интерполяцию?
Выполнить линейную интерполяцию так же просто, как использовать приведенное выше уравнение.Сначала найдите известные точки координат, затем вставьте значения в калькулятор или в формулу.
FAQ
Что такое интерполяция?Интерполяция определяется как экстраполяция данных с использованием прошлых данных.
Формула линейной интерполяции — Образование
Формула интерполяции: Метод поиска новых значений для любой функции с использованием набора значений выполняется путем интерполяции. Неизвестное значение точки находится по этой формуле.Если речь идет о формуле линейной интерполяции, то ее следует использовать для нахождения нового значения из двух заданных точек. По сравнению с формулой интерполяции Лагранжа, должен быть доступен набор чисел «n», и для нахождения нового значения следует использовать метод Лагранжа.
Интерполяция — это процесс нахождения значения между двумя точками на линии или кривой. Чтобы помочь нам запомнить, что это означает, мы должны думать о первой части слова «интер» как о значении «ввод», которое напоминает нам о том, чтобы заглянуть «внутрь» данных, которые у нас изначально были.Этот инструмент, интерполяция, полезен не только в статистике, но также полезен в науке, бизнесе или в любое время, когда необходимо предсказать значения, которые попадают в две существующие точки данных.
Формула линейной интерполяцииФормула линейной интерполяции
Если две известные точки заданы координатами {\ displaystyle (x_ {0}, y_ {0})} и {\ displaystyle (x_ {1}, y_ {1})}, линейный интерполянт является прямая линия между этими точками. Для значения x в интервале {\ displaystyle (x_ {0}, x_ {1})} значение y вдоль прямой линии определяется из уравнения наклонов
.- {\ displaystyle {\ frac {y-y_ {0}} {x-x_ {0}}} = {\ frac {y_ {1} -y_ {0}} {x_ {1} -x_ {0}) }},}
, который геометрически может быть получен из рисунка справа.Это частный случай полиномиальной интерполяции с n = 1.
Решение этого уравнения относительно y , которое является неизвестным значением при x , дает
- {\ displaystyle y = y_ {0} + (x-x_ {0}) {\ frac {y_ {1} -y_ {0}} {x_ {1} -x_ {0}}} = {\ frac {y_ {0} (x_ {1} -x) + y_ {1} (x-x_ {0})} {x_ {1} -x_ {0}}},}
, который представляет собой формулу линейной интерполяции в интервале {\ displaystyle (x_ {0}, x_ {1})}. За пределами этого интервала формула идентична линейной экстраполяции.
Эту формулу также можно понимать как средневзвешенное значение. Веса обратно пропорциональны расстоянию от конечных точек до неизвестной точки; более близкая точка имеет большее влияние, чем более удаленная. Таким образом, веса равны {\ textstyle {\ frac {x-x_ {0}} {x_ {1} -x_ {0}}}} и {\ textstyle {\ frac {x_ {1} -x} {x_ { 1} -x_ {0}}}}, которые представляют собой нормализованные расстояния между неизвестной точкой и каждой из конечных точек. Потому что эти суммы равны 1
- {\ displaystyle y = y_ {0} \ left (1 — {\ frac {x-x_ {0}} {x_ {1} -x_ {0}}} \ right) + y_ {1} \ left ( 1 — {\ frac {x_ {1} -x} {x_ {1} -x_ {0}}} \ right) = y_ {0} \ left (1 — {\ frac {x-x_ {0}} { x_ {1} -x_ {0}}} \ right) + y_ {1} \ left ({\ frac {x-x_ {0}} {x_ {1} -x_ {0}}} \ right),}
Калькулятор формул интерполяции
Решенные примеры
Вопрос 1: Используя формулу интерполяции, найти значение y при x = 8 для некоторого набора значений (2, 6), (5, 9)?
Решение:Известные значения: x0 = 8, x1 = 2, x2 = 5, y1 = 6, y2 = 9y = y1 + (x − x1) (x2 − x1) × (y2 − y1)
у = 6 + ((8−2) (5−2) × (9−6)
у = 6 + 6
г = 12
Что такое метод линейной интерполяции?
Линейная интерполяция — это простейший метод получения значений в положениях между точками данных.Точки просто соединяются отрезками прямых линий.
Как найти интерполяцию между двумя числами?
Знать формулу для процесса линейной интерполяции . Формула : y = y1 + ((x — x1) / (x2 — x1)) * (y2 — y1), где x — известное значение, y — неизвестное значение, x1 и y1 — координаты, которые ниже известного значения x, а x2 и y2 — координаты выше значения x.
Что такое метод интерполяции?
В математической области численного анализа интерполяция — это метод построения новых точек данных в диапазоне дискретного набора известных точек данных.… Несколько точек данных из исходной функции можно интерполировать , чтобы получить более простую функцию, которая все еще довольно близка к исходной.
Формула интерполяции Excel
Формула интерполяции ExcelВот пример, иллюстрирующий концепцию интерполяции. Садовник посадил помидор, и она измеряла и отслеживала его рост через день. Этот садовник — любопытный человек, и она хотела бы оценить, насколько высоким было ее растение на четвертый день.
Читайте также: Средняя и мгновенная скорость изменения
Ее таблица наблюдений выглядела так:
Исходя из диаграммы, нетрудно определить, что на четвертый день растение было примерно 6 мм в высоту. Это потому, что это дисциплинированное растение томата росло линейно; была линейная зависимость между количеством измеренных дней и ростом растения. Линейный образец означает, что точки образуют прямую линию.Мы могли даже оценить, нанеся данные на график.
Но что, если растение росло не по удобной линейной схеме? Что, если бы его рост выглядел примерно так?
Что бы сделал садовник, чтобы сделать оценку на основе приведенной выше кривой? Что ж, вот здесь и пригодится формула интерполяции.
Формула интерполяции Thermo
Линейная интерполяция использовалась с древних времен для заполнения пробелов в таблицах.Предположим, у вас есть таблица, в которой перечислено население какой-либо страны в 1970, 1980, 1990 и 2000 годах, и вы хотите оценить численность населения в 1994 году. Линейная интерполяция — простой способ сделать это. Считалось, что метод использования линейной интерполяции для составления таблиц использовался вавилонскими астрономами и математиками в Месопотамии Селевкидов (последние три века до нашей эры), а также греческим астрономом и математиком Гиппархом (2 век до нашей эры). Описание линейной интерполяции можно найти в Альмагесте (2 век нашей эры) Птолемея.
Основная операция линейной интерполяции между двумя значениями обычно используется в компьютерной графике. На жаргоне этой области его иногда называют lerp . Термин может использоваться как глагол или существительное для операции. например «Алгоритм Брезенхема постепенно перемещается между двумя конечными точками линии».
Операции Lerp встроены в аппаратное обеспечение всех современных процессоров компьютерной графики. Их часто используют в качестве строительных блоков для более сложных операций: например, билинейную интерполяцию можно выполнить за три лерпа.Поскольку эта операция стоит недорого, это также хороший способ реализовать точные таблицы поиска с быстрым поиском плавных функций без слишком большого количества записей в таблице.
Читайте также: Что такое буквенно-цифровые символы?
Формула интерполяции
Допустим, у нас есть две известные точки x1, y1x1, y1 и x2, y2x2, y2.
Теперь мы хотим оценить, какое значение yy мы получили бы для некоторого значения xx, которое находится между x1x1 и x2x2. Назовите это значение yy оценкой — интерполированное значение .
На ум приходят два простых метода выбора yy. Во-первых, нужно посмотреть, ближе ли xx к x1x1 или к x2x2. Если xx ближе к x1x1, тогда мы используем y1y1 в качестве оценки, в противном случае мы используем y2y2. Это называется интерполяцией ближайшего соседа .
Второй — провести прямую линию между x1, y1x1, y1 и x2, y2x2, y2. Мы смотрим, чтобы увидеть значение yy в строке для нашего выбранного xx. Это линейная интерполяция .
Можно показать, что формула линии между x1, y1x1, y1 и x2, y2x2, y2:
y = y1 + (x − x1) y2 − y1x2 − x1y = y1 + (x − x1) y2 − y1x2 − x1
Формула двойной интерполяции
Чтобы выполнить линейную интерполяцию в Excel, мы будем использовать приведенное ниже уравнение, где x — независимая переменная, а y — значение, которое мы хотим найти:
Линейная интерполяция в Excel — Dagra Data Digitizer
Как работает реализация Excel
Простую реализацию легче всего понять, проанализировав извне и работая внутри.Вот полное уравнение:
= ПРОГНОЗ ( NewX , OFFSET ( KnownY , MATCH ( NewX , KnownX , 1) -1,0,2), OFFSET ( KnownX , MATCH ( NewX) , ИзвестноX , 1) -1,0,2))
Вкратце уравнение состоит из 3 частей:- функция ПРОГНОЗ для вычисления линейной интерполяции,
- два вызова функции ПОИСКПОЗ, чтобы найти ближайшее табличное значение x, но меньше нового значения x, и
- два вызова функции OFFSET для ссылки на табулированные значения x и значения y чуть выше и чуть ниже нового значения x.
Более подробно, функция ПРОГНОЗ выполняет фактическую интерполяцию, используя уравнение линейной интерполяции, показанное выше. Его синтаксис: ПРОГНОЗ ( NewX , known_y_pair , known_x_pair ).
Первый параметр NewX — это просто значение для интерполяции. Следующие два параметра, известная_y_ пара и известная_x_ пара , являются значениями по обе стороны от NewX . То есть {x1, x2} и {y1, y2} на диаграмме выше.
Функция ПОИСКПОЗ используется для нахождения табличного значения x чуть ниже NewX . Его синтаксис: MATCH ( lookup_value , lookup_table , match_type ). ПОИСКПОЗ возвращает относительное положение элемента в отсортированном массиве. Итак, lookup_value — это значение для интерполяции, lookup_table — это массив значений KnownX , а match_type — 1, чтобы найти наибольшее значение в массиве, которое меньше или равно NewX .
Функция ПОИСКПОЗ возвращает индекс, но для функции ПРОГНОЗ требуется два диапазона ячеек: один для пары известных_х_х_ и один для пары_известных_г_ . Таким образом, функция СМЕЩЕНИЕ используется дважды для создания этих диапазонов. Его синтаксис: OFFSET ( ссылка , row_offset , column_offset , row_count , column_count ). Он берет начальную точку, ссылку , и создает ссылку на ячейку с заданным смещением и размером.Чтобы получить диапазон known_y_pair , ссылка устанавливается в таблицу значений KnownY ; для диапазона known_x_pair ссылка установлена на массив значений KnownX . Если табличные значения расположены вертикально, row_offset является результатом функции MATCH меньше 1, а row_count равно 2; column_offset равен 0, а column_count равен 1. Это дает нам ссылку на массив ячеек на 2 ячейки в высоту и 1 ячейку в ширину.Если табличные значения расположены горизонтально, строка и столбец переключаются в функции СМЕЩЕНИЕ.
Программа Python для линейной интерполяции
Чтобы интерполировать значение зависимой переменной y в некоторой точке независимой переменной x с использованием Linear Interpolation , мы берем две точки, т.е. если нам нужно интерполировать y, соответствующий x, который находится между x 0 и x 1 , затем мы берем две точки [x 0 , y 0 ] и [x 1 , y 1 ] и строим Linear Interpolants , который представляет собой прямую линию между этими точками i.е.
y - y 0 = ((y 1 - y 0 ) / (x 1 - x 0 )) * (x - x 0 )
И если необходимо получить значение y, то, используя приведенное выше уравнение, мы вычисляем yp при x = xp как:
yp = y 0 + ((y 1 - y 0 ) / (x 1 - x 0 )) * (xp - x 0 )
Точно так же, если нам нужно интерполировать y, соответствующий x, который находится между x 1 и x 2 , тогда мы берем две точки [x 1 , y 1 ] и [x 2 , y 2 ] и строит Linear Interpolants , который представляет собой прямую линию между этими точками i.е.
y - y 1 = ((y 2 - y 1 ) / (x 2 - x 1 )) * (x - x 1 )
И если необходимо получить значение y, то, используя приведенное выше уравнение, мы вычисляем yp при x = xp как:
yp = y 1 + ((y 2 - y 1 ) / (x 2 - x 1 )) * (xp - x 1 )
Эта программа на Python реализует алгоритм линейной интерполяции , как обсуждалось выше, для интерполяции промежуточного значения.
Исходный код Python: линейная интерполяция
# Линейная интерполяция в Python # Раздел ввода # Чтение первой точки print ('Введите первую точку:') x0 = float (ввод ('x0 =')) y0 = float (вход ('y0 =')) # Чтение второй точки print ('Введите вторую точку:') x1 = float (ввод ('x1 =')) y1 = float (ввод ('y1 =')) # Чтение точки расчета xp = float (input ('Введите точку вычисления xp:')) # Расчет интерполированного значения yp = y0 + ((y1-y0) / (x1-x0)) * (xp - x0) # Отображение результата print ('Интерполированное значение в% 0.4f составляет% 0,4f '% (xp, yp))Вывод: линейная интерполяция Python
Предположим, у нас есть проблема интерполяции, сформулированная следующим образом: «По некоторым наблюдениям установлено, что давление, зарегистрированное при температуре 35 ° C, составляет 5,6 кПа, а при 40 ° C — 7,4 кПа. Позже требуется, чтобы используйте давление при 37 ° C, которого нет в таблице наблюдений. Таким образом, значение давления при 37 ° C необходимо интерполировать, и его можно рассчитать с помощью вышеуказанной программы как: «
Введите первую точку: х0 = 35 y0 = 5,6 Введите вторую точку: х1 = 40 у1 = 7.4 Введите расчетную точку xp: 37 Интерполированное значение при 37,0000 составляет 6,3200.
Интерполяция с помощью Excel — Excel вне сетки
Интерполяция — это процесс оценки точек данных в существующем наборе данных. Поскольку это блог об Excel, очевидно, что мы хотим ответить на следующий вопрос: можем ли мы выполнять интерполяцию с помощью Excel. Это частый вопрос. Фактически, это был следующий вопрос от читателя, который первым заставил меня изучить эту тему:
«У меня есть вопрос Excel — есть ли способ интерполировать значение из таблицы? У меня есть X и Y, которых нет в таблице, но есть коррелированные данные, поэтому я хочу вычислить интерполированное значение ».
В качестве простого примера: если пройти 1 милю в понедельник за 15 минут, а во вторник — за 1 час, мы могли бы разумно оценить, что пройти 2 мили потребуется 30 минут.
Не следует путать с экстраполяцией, которая оценивает значения вне набора данных. Оценка того, что пройти 8 миль займет 2 часа, будет экстраполяцией, поскольку оценка выходит за рамки известных значений.
Excel — отличный инструмент для интерполяции, так как в конечном итоге это большой визуальный калькулятор.
Загрузите файл с примером
Я рекомендую вам загрузить файл с примером для этого поста. Тогда вы сможете работать с примерами и увидеть решение в действии, а файл будет полезен для дальнейшего использования.
Загрузите файл: 0020 Interpolate with Excel.xlsxПосмотрите видео
Посмотрите видео на YouTube.Варианты интерполяции в Excel
С точки зрения ответа на вопрос, есть несколько сценариев, которые могут привести к различным решениям.
Во-первых, мы могли использовать простую математику. Это сработало бы, если бы результаты были абсолютно линейными (т.е. значения X и Y перемещались синхронно друг с другом). Но в противном случае мы могли бы получить немного искаженный результат.
В качестве альтернативы мы могли бы использовать функцию ПРОГНОЗ в Excel (или ПРОГНОЗ.ЛИНЕЙНЫЙ в Excel 2016 и последующих версиях). Судя по названию, функция ПРОГНОЗ выглядит странным выбором. Казалось бы, это функция специально для экстраполяции; однако это также один из лучших вариантов линейной интерполяции в Excel.FORECAST использует все значения в наборе данных для оценки результата; поэтому он отлично подходит для линейных отношений, даже если они не полностью коррелированы.
Тогда еще одна мысль, а что, если отношения X и Y вообще не линейны? Как мы могли интерполировать значение, когда данные экспоненциальны?
Давайте рассмотрим все эти сценарии.
Интерполяция с использованием простой математики
Простая математика хорошо работает, когда есть только две пары чисел или когда отношения между X и Y совершенно линейны.
Вот базовый пример (см. Вкладку Пример 1 в вспомогательном файле загрузки):
Формула в ячейке E4:
= B2 + (E2-A2) * (B3-B2) / (A3-A2)
Кому-то это может показаться немного сложным, поэтому вот краткий обзор формулы.
= B2 + (E2-A2) * (B3-B2) / (A3-A2)
В последнем разделе (выделенном зеленым цветом выше) вычисляется, насколько изменяется значение Y при изменении значения X на 1. В В нашем примере Y сдвигается на 1.67 для каждого 1 из X.
= B2 + (E2-A2) * (B3-B2) / (A3-A2)
Второй раздел (выделенный зеленым цветом выше) вычисляет, как далеко интерполированный X отстоит от сначала X, затем умножается на вычисленное выше значение. В нашем примере результат рассчитывается как 17,5 (ячейка E2) минус 10 (ячейка A2), результат затем умножается на 1,67. Все это равно 12,5.
= B2 + (E2-A2) * (B3-B2) / (A3-A2)
Наконец, мы переходим к первой части формулы (выделенной зеленым цветом выше), которая складывает первое значение Y.В нашем примере это дает окончательный результат 77,5 (65 + 12,5). Для тех, кто помнит математику в средней школе, формула будет следующей:
Вот результат, наложенный на диаграмму.
Даже если вы не помните линейную интерполяцию в школе, хорошая новость заключается в том, что Excel предоставил нам более простой вариант — функцию ПРОГНОЗ.
Formula Magic с динамическими массивами
Из всех функций, доступных в Excel, динамические массивы обеспечивают максимальную мощность при минимальных затратах времени.Однако большинство пользователей Excel даже не знают, что они собой представляют.
Вы когда-нибудь сталкивались с подобными сценариями работы с электронными таблицами?
- Как я могу использовать ВПР для возврата всех совпадающих элементов , а не только первого?
- Как отсортировать информацию по формуле , чтобы не нажимать кнопку сортировки постоянно?
- Как я могу быстро создать уникальные списки элементов для использования с моим вычислением СУММЕСЛИМН?
- Как я могу остановить копирование формул каждый раз, когда мои исходные данные меняются.
- Как я могу создать отчет в виде сводной таблицы , но с использованием формул , чтобы мне больше не приходилось нажимать кнопку «Обновить».
Что ж, я здесь, чтобы сообщить вам хорошие новости. с динамическими массивами все это может быть легко достигнуто 🙂
Интерполяция с помощью функции ПРОГНОЗ
В версии Excel 2016 было добавлено множество новых статистических функций. Чтобы освободить место для этих новых функций, ПРОГНОЗ был заменен на ПРОГНОЗ.Линейная функция. Хотя ПРОГНОЗ остается на данный момент с целью обратной совместимости с Excel 2013 и ранее.
Поскольку FORECAST и FORECAST.LINEAR фактически одно и то же, мы будем использовать эти термины как синонимы.
Интерполяция при идеальной линейности
Теперь давайте воспользуемся ПРОГНОЗОМ для интерполяции результата.
Используя те же числа из приведенного выше примера, формула в ячейке E6:
= ПРОГНОЗ (E2, B2: B3, A2: A3)
Функция ПРОГНОЗ имеет следующий синтаксис:
= ПРОГНОЗ (x, известные_y, известные_x)
Три аргумента в функции:
- x — точка данных, для которой мы хотим спрогнозировать значение
- known_y’s — диапазон ячеек или массив значений содержащие известные значения Y
- известные_x — диапазон ячеек или массив значений, содержащий известные значения X
При использовании функции ПРОГНОЗ результат ячейки E6 также равен 77.5 (как и в математическом подходе).
Для полноты картины файл примера также содержит использование функции FORECAST.LINEAR. Как и следовало ожидать, результат идентичен устаревшей функции ПРОГНОЗ.
Интерполяция, когда приблизительно линейна
Но … что, если наши данные не совсем линейны? Посмотрите на диаграмму ниже, данные явно имеют линейную зависимость, но она не идеальна. Посмотрите на вкладку Пример 2 во вспомогательном файле.
В этих обстоятельствах функция ПРОГНОЗ даже более полезна, поскольку она не просто интерполирует между первым и последним значениями.Вот данные, использованные в диаграмме.
Функция ПРОГНОЗ в ячейке E4 интерполирует значение Y на основе значения X, равного 17,5.
= ПРОГНОЗ (E2, B2: B11, A2: A11)
В этом сценарии ПРОГНОЗ оценивает значение на основе всех доступных точек данных, а не только начала и конца. Результат функции ПРОГНОЗ в ячейке E4 равен 77,3 (округлено до 1 десятичного знака), что в большинстве случаев будет более точным, чем простая линейная интерполяция, применяемая в математическом подходе.
Помните, что для оценки значений используется интерполяция. 77.3 может быть неточным результатом, но это разумная оценка, основанная на имеющейся у нас информации.
И снова FORECAST.LINEAR вычисляет тот же результат.
Интерполяция, когда данные не линейны
Но вот более сложный вопрос: что, если данные вообще не линейны? Тогда что?
Посмотрите на вкладку Example 3 во вспомогательном файле. Вот наш новый сценарий графика:
Если бы мы использовали простой линейный подход, это дало бы нам значение 77.5, который, как вы можете видеть ниже, довольно далеко от кривой. Использование функции ПРОГНОЗ даст результат 70,8, что лучше, но также далеко от кривой.
Есть еще два варианта для получения более точной оценки (1) интерполяция экспоненциальных данных с помощью функции РОСТА (2) вычисление внутренней линейной интерполяции
Интерполировать экспоненциальные данные
Функция РОСТА аналогична ПРОГНОЗУ, но может применяться к данным с экспоненциальным ростом.
Результат функции РОСТ в ячейке E10 равен 70,4. Опять же, это ближе к черте, но все же немного дальше.
Формула в ячейке E10:
= РОСТ (B2: B11, A2: A11, E2)
Функция РОСТ имеет следующий синтаксис:
= РОСТ (известные_y, [известные_x], [новые_x] , [const])
Четыре аргумента в функции РОСТ (только имейте в виду, что аргументы не в том же порядке, что и функция ПРОГНОЗ).
- known_y’s — диапазон ячеек или массив значений, содержащих известные значения Y
- [известные_x] — диапазон ячеек или массив значений, содержащий известные значения X
- [new_x’s] — точка данных, для которой мы хотим спрогнозировать значение
- [Const] — мера истина / ложь, указывающая, как должна вычисляться формула. В нашем сценарии мы можем оставить этот последний аргумент.
Квадратные скобки указывают, какие аргументы являются необязательными для функции для вычисления результата.Нам нужны известные_y , известные_x, и новые_x , но мы проигнорировали аргумент const .
Хотя результат 70,4 является более близким приближением, мы не должны слепо использовать функцию РОСТ. Проверьте свои интерполяции, чтобы убедиться, что они разумны.
Внутренняя линейная интерполяция
Разумным вариантом может быть найти результат выше и ниже нового значения X, а затем применить линейную интерполяцию между этими двумя точками.Это было бы довольно близко.
В нашем примере значения по обе стороны от X, равного 17,5:
- X: 16 и 18
- Y: 66,3 и 68
Используя эти значения, теперь мы можем выполнить стандартную линейную интерполяцию. .
Быстрый одноразовый метод
Если бы это было разовое действие, мы могли бы сделать это быстро, включив в формулу только основные ячейки.
= ПРОГНОЗ (E2, B6: B7, A6: A7)
Однако, как только мы изменим интерполированное значение, ПРОГНОЗ может вычислить неточный результат.Итак, давайте перейдем к рассмотрению гибкого метода.
Гибкий подход
Чтобы создать гибкий подход, мы будем использовать вместе функции ИНДЕКС, ПОИСКПОЗ и ПРОГНОЗ. Это может показаться сложным, но не волнуйтесь, мы рассмотрим это медленно. В конечном итоге мы пытаемся достичь того же результата, что и описанный выше одноразовый метод, но автоматически корректируем диапазоны в зависимости от интерполируемого значения.
ПРИМЕЧАНИЕ. Для работы этого метода требуется, чтобы диапазон известных X был указан в порядке возрастания.
Функция ПОИСКПОЗ
Во-первых, мы используем функцию ПОИСКПОЗ, чтобы получить позицию значения ниже 17,5.
= ПОИСКПОЗ (E2, A2: A11,1)
Эта формула говорит, что найдите значение в ячейке E2 из диапазона ячеек A2-A11. 1 в конце формулы сообщает функции ПОИСКПОЗ, что мы хотим использовать приблизительное совпадение (т. Е. Ближайшее значение ниже искомого значения). 16 — ближайшее значение ниже 17,5. Поскольку 16 — это 5-й элемент в ячейках A2-A11, ПОИСКПОЗ возвращает значение 5.
ИНДЕКС функция
Определив на предыдущем этапе, что пятая позиция содержит значение ниже, мы можем использовать функцию ИНДЕКС, чтобы определить ссылку на ячейку для этого значения.
ИНДЕКС (A2: A11, MATCH (E2, A2: A11,1))
Это вернет ссылку на ячейку A6.
Чтобы найти указанное выше значение, мы можем использовать ту же функцию, но добавить 1 к функции ПОИСКПОЗ.
ИНДЕКС (A2: A11, ПОИСКПОЗ (E2, A2: A11,1) +1 )
Приведенная выше формула вернет ссылку на ячейку A7.
Динамический диапазон
Теперь все становится интереснее. Мы можем объединить эти функции с двоеточием (:) в середине, чтобы создать диапазон для двух значений X.
ИНДЕКС (A2: A11, ПОИСКПОЗ (E2, A2: A11,1)): ИНДЕКС (A2: A11, ПОИСКПОЗ (E2, A2: A11,1) +1)
Первая функция ИНДЕКС возвращает ссылку в ячейку A6 (результат выделенного зеленым цветом раздела). Вторая функция ИНДЕКС возвращает ссылку на ячейку A7 (результат выделенного фиолетовым цветом раздела).Они разделены двоеточием (:) (выделены красным), чтобы создать диапазон — A6: A7
Мы можем сделать то же самое, чтобы создать диапазон для двух значений Y. Единственная разница в том, что функции ИНДЕКС будут смотреть на ячейки B2-B11.
ИНДЕКС (B2: B11, ПОИСКПОЗ (E2, A2: A11,1)): ИНДЕКС (B2: B11, ПОИСКПОЗ (E2, A2: A11,1) +1)
Используя ячейки B2-B11 в ИНДЕКСЕ функция, она вычислит диапазон B6: B7.
ИНДЕКС СООТВЕТСТВИЕ И ПРОГНОЗ
Теперь у нас есть два диапазона; значения X A6: A7 и значения Y B6: B7.Давайте объединим все это в функции ПРОГНОЗ.
= ПРОГНОЗ (E2, ИНДЕКС (B2: B11; ПОИСКПОЗ (E2; A2: A11,1)): ИНДЕКС (B2: B11; ПОИСКПОЗ (E2; A2: A11,1) +1), ИНДЕКС (A2: A11, MATCH (E2, A2: A11,1)): INDEX (A2: A11, MATCH (E2, A2: A11,1) +1))
Это довольно большая формула, верно. Но, надеюсь, мне удалось объяснить это так, что это не слишком страшно.
Результат внутренней линейной интерполяции с использованием функции ПРОГНОЗ составляет 67,6 (с точностью до 1 десятичного знака, показан в ячейке E14). Взгляните на график еще раз; вы увидите, что 67.6 — разумная оценка, основанная на имеющихся данных.
ПРЕДУПРЕЖДЕНИЕ. В конечном счете, это все еще вычисление линейной интерполяции, основанное на двух значениях по обе стороны от значения X. Расстояние между значениями выше и ниже будет иметь прямое влияние на точность интерполяции.
Заключение
Первоначально то, что казалось простым вопросом, привело нас к множеству потенциальных решений для трех различных сценариев. Ключевым моментом является то, что вам необходимо знать свои данные, чтобы выбрать метод, обеспечивающий наиболее точные результаты.
В процессе мы рассмотрели функции FORECAST и FORECAST.LINEAR и убедились, что они полезны как для интерполяции, так и для экстраполяции.
Кроме того, в этом посте мы использовали ИНДЕКС и ПОИСКПОЗ для создания динамических диапазонов, что является очень мощным методом для сложных формул в Excel.
Если вам нужна дополнительная информация о методах прогнозирования в Excel, загляните в Engineer Excel (https://engineerexcel.com/blog). Хотя вы, возможно, не работаете в инженерном контексте, методы применимы во многих других обстоятельствах.
Получите нашу БЕСПЛАТНУЮ электронную книгу на VBA с 30 наиболее полезными макросами Excel VBA.
Автоматизируйте Excel, чтобы сэкономить время и перестать выполнять ту работу, которую могла бы выполнять обученная обезьяна.Вводя свой адрес электронной почты, вы соглашаетесь получать электронные письма от Excel Off The Grid. Мы будем уважать вашу конфиденциальность, и вы можете отказаться от подписки в любое время.
Не забудьте:
Если вы нашли этот пост полезным или у вас есть лучший подход, оставьте комментарий ниже.
Вам нужна помощь в адаптации этого к вашим потребностям?
Я полагаю, что примеры в этом посте не совсем соответствуют вашей ситуации. Все мы используем Excel по-разному, поэтому невозможно написать сообщение, которое удовлетворит потребности всех. Потратив время на то, чтобы понять методы и принципы, описанные в этом посте (и в других местах на этом сайте), вы сможете адаптировать их к своим потребностям.
Но, если вы все еще боретесь, вам следует:
- Прочитать другие блоги или посмотреть видео на YouTube на ту же тему.Вы получите гораздо больше пользы, открыв свои собственные решения.
- Спросите «Excel Ninja» в своем офисе. Удивительно то, что знают другие люди.
- Задайте вопрос на форуме, например в Mr Excel, или в сообществе ответов Microsoft. Помните, что люди на этих форумах обычно проводят свое время бесплатно. Так что постарайтесь сформулировать свой вопрос, сделайте его ясным и кратким. Составьте список всего, что вы пробовали, и предоставьте снимки экрана, фрагменты кода и примеры рабочих книг.
- Воспользуйтесь Excel Rescue, моим партнером-консультантом.Они помогают, предлагая решения небольших проблем с Excel.
Что дальше?
Не уходите, есть еще много чего узнать об Excel Off The Grid. Ознакомьтесь с последними сообщениями:LinearSplineInterpolate — LinearSplineInterpolate — LinearSplineInterpolate — LinearSplineInterpolate
1 Конвертер Преобразует число из одной системы измерения в другую. 2 SG2API SG2API — Преобразует удельную плотность масла в плотность API 3 API2SG API2SG — Преобразует плотность в градусах API в удельный вес нефти (вода = 1.0) 4 Данные Производная для выборок данных в точке t со сглаживанием. 5 ExpIntegralEi ExpIntegralEi — экспоненциальная интегральная функция — Ei (x) 6 Проксимальный ProximalInterpolate — Алгоритм проксимальной (ближайшего соседа) интерполяции.Интерполировать в точке t. 7 CubicSplineInterpolate Естественный кубический сплайн с непрерывной второй производной внутри и нулевой второй производной в конечных точках.Интерполировать в точке t. 8 CubicSpline Естественный кубический сплайн с непрерывной второй производной внутри и нулевой второй производной в конечных точках.Дифференцируйте в точке t. 9 CubicSplineИнтегрировать Естественный кубический сплайн с непрерывной второй производной внутри и нулевой второй производной в конечных точках.Интегрируйте до точки t. 10 CubicSplineIntegrateT1T2 Естественный кубический сплайн с непрерывной второй производной внутри и нулевой второй производной в конечных точках.Проинтегрируем от точки t1 до точки t2. 11 КубическиеСплайныПересечение x значение точки пересечения двух кубических шлицев. 12 LinearSplineInterpolate LinearSplineInterpolate — LinearSplineInterpolate — LinearSplineInterpolate — LinearSplineInterpolate — LinearSplineInterpolate — Алгоритм интерполяции линейного сплайна.Интерполировать в точке t. 13 Линейный Алгоритм интерполяции линейным сплайном. Дифференцируйте в точке t. 14 Линейный LinearSplineIntegrate — алгоритм интерполяции линейного сплайна.Интегрируйте до точки t. 15 LinearSplineIntegrateT1T2 Алгоритм интерполяции линейным сплайном. Калькулятор десятичных логарифмов: Калькулятор десятичный логарифм
//Калькулятор десятичный логарифм
Определение логарифма
Когда мы обсуждали решение показательных уравнений, то нам всегда удавалось представить обе части в виде степеней с одинаковыми основаниями.
Но вполне логично, что может возникнуть ситуация, когда это сделать не удастся. Например, решить уже рассмотренными методами уравнение не получится, так как 5 мы пока не умеем представлять в виде степени с основанием 2.
С другой стороны, мы обсуждали тот факт, что показательная функция принимает любое положительное значение. Поэтому, в какой-то точке значение функции должно равняться 5.
Фактически, мы столкнулись с ситуацией, похожей на извлечение корня – мы точно знали, что есть число, квадрат которого равен 2, но не могли записать его доступными нам методами. В том случае мы поступили следующим образом: ввели новое понятие «корень» и операцию извлечение корня, которая была обратна возведению в степень.
Возвращаясь к нашей проблеме, нам придётся поступить аналогично.
Обозначим степень, в которую надо возвести 2, чтобы получить 5, как – логарифм пяти по основанию 2.То есть, определение логарифма следующее: для . То есть, логарифм показывает: в какую степень необходимо возвести основание логарифма (), чтобы получилось подлогарифмическое выражение ().
Рассмотрим простейшие примеры вычисления логарифмов:
1) , так как .
2) , так как .
3) , так как .
4), так как .
Переход к новому основанию
Говоря о правилах сложения и вычитания логарифмов, я специально подчеркивал, что они работают только при одинаковых основаниях. А что, если основания разные? Что, если они не являются точными степенями одного и того же числа?
На помощь приходят формулы перехода к новому основанию. Сформулируем их в виде теоремы:
Из второй формулы следует, что можно менять местами основание и аргумент логарифма, но при этом все выражение «переворачивается», т.е. логарифм оказывается в знаменателе.
Эти формулы редко встречается в обычных числовых выражениях.
Оценить, насколько они удобны, можно только при решении логарифмических уравнений и неравенств.Впрочем, существуют задачи, которые вообще не решаются иначе как переходом к новому основанию. Рассмотрим парочку таких:
Заметим, что в аргументах обоих логарифмов стоят точные степени. Вынесем показатели: log5 16 = log5 24 = 4log5 2; log2 25 = log2 52 = 2log2 5;
А теперь «перевернем» второй логарифм:
Поскольку от перестановки множителей произведение не меняется, мы спокойно перемножили четверку и двойку, а затем разобрались с логарифмами.
Основание и аргумент первого логарифма — точные степени. Запишем это и избавимся от показателей:
Теперь избавимся от десятичного логарифма, перейдя к новому основанию:
Функция десятичного логарифма
Если рассматривать логарифмируемое число как переменную, мы получим функцию десятичного логарифма: y=lgx.{\displaystyle y=\lg \,x.} Она определена при всех x>{\displaystyle x>0.
} Область значений: E(y)=(−∞;+∞){\displaystyle E(y)=(-\infty ;+\infty )}. График этой кривой часто называется логарифмикой.Функция монотонно возрастает, непрерывна и дифференцируема всюду, где она определена. Производная для неё даётся формулой:
- ddxlgx=lgex{\displaystyle {\frac {d}{dx}}\lg \,x={\frac {\lg \,e}{x}}}
Ось ординат (x=){\displaystyle (x=0)} является вертикальной асимптотой, поскольку:
- limx→+lgx=−∞{\displaystyle \lim _{x\to 0+0}\lg \,x=-\infty }
Алгебраические свойства
В нижеследующей таблице предполагается, что все значения положительны:
Формула Пример Произведение lg(xy)=lg(x)+lg(y){\displaystyle \lg(xy)=\lg(x)+\lg(y)} lg(10000)=lg(100⋅100)=lg(100)+lg(100)=2+2=4{\displaystyle \lg(10000)=\lg(100\cdot 100)=\lg(100)+\lg(100)=2+2=4} Частное от деления lg(xy)=lg(x)−lg(y){\displaystyle \lg \!\left({\frac {x}{y}}\right)=\lg(x)-\lg(y)} lg(11000)=lg(1)−lg(1000)=−3=−3{\displaystyle \lg \left({\frac {1}{1000}}\right)=\lg(1)-\lg(1000)=0-3=-3} Степень lg(xp)=plg(x){\displaystyle \lg(x^{p})=p\lg(x)} lg(10000000)=lg(107)=7lg(10)=7{\displaystyle \lg(10000000)=\lg(10^{7})=7\lg(10)=7} Корень lgxp=lg(x)p{\displaystyle \lg {\sqrt{x}}={\frac {\lg(x)}{p}}} lg1000=12lg1000=32=1,5{\displaystyle \lg {\sqrt {1000}}={\frac {1}{2}}\lg 1000={\frac {3}{2}}=1{,}5} Существует очевидное обобщение приведённых формул на случай, когда допускаются отрицательные переменные, например:
- lg|xy|=lg(|x|)+lg(|y|),{\displaystyle \lg |xy|=\lg(|x|)+\lg(|y|),}
- lg|xy|=lg(|x|)−lg(|y|),{\displaystyle \lg \!\left|{\frac {x}{y}}\right|=\lg(|x|)-\lg(|y|),}
Формула для логарифма произведения без труда обобщается на произвольное количество сомножителей:
- lg(x1x2…xn)=lg(x1)+lg(x2)+⋯+lg(xn){\displaystyle \lg(x_{1}x_{2}\dots x_{n})=\lg(x_{1})+\lg(x_{2})+\dots +\lg(x_{n})}
Вышеописанные свойства объясняют, почему применение логарифмов (до изобретения калькуляторов) существенно облегчало вычисления.
Например, умножение многозначных чисел x,y{\displaystyle x,y} с помощью логарифмических таблиц производилось по следующему алгоритму:- Найти в таблицах логарифмы чисел x,y{\displaystyle x,y}.
- Сложить эти логарифмы, получая (согласно первому свойству) логарифм произведения x⋅y{\displaystyle x\cdot y}.
- По логарифму произведения найти в таблицах само произведение.
Деление, которое без помощи логарифмов намного более трудоёмко, чем умножение, выполнялось по тому же алгоритму, лишь с заменой сложения логарифмов на вычитание. Аналогично производились возведение в степень и извлечение корня.
Связь десятичного и натурального логарифмов:
- lnx≈2,30259 lgx;lgx≈0,43429 lnx{\displaystyle \ln x\approx 2{,}30259\ \lg x;\quad \lg x\approx 0{,}43429\ \ln x}
Знак логарифма зависит от логарифмируемого числа: если оно больше 1, логарифм положителен, если оно между 0 и 1, то отрицателен. Пример:
- lg0,012=lg(10−2×1,2)=−2+lg1,2≈−2+0,079181=−1,920819{\displaystyle \lg \,0{,}012=\lg \,(10^{-2}\times 1{,}2)=-2+\lg \,1{,}2\approx -2+0{,}079181=-1{,}920819}
Чтобы унифицировать действия с положительными и отрицательными логарифмами, у последних целая часть (характеристика) надчёркивалась сверху:
- lg0,012≈−2+0,079181=2¯,079181{\displaystyle \lg \,0{,}012\approx -2+0{,}079181={\bar {2}}{,}079181}
Мантисса логарифма, выбираемая из таблиц, при таком подходе всегда положительна.
История
- Основная статья: История логарифмов
Первые таблицы десятичных логарифмов опубликовал в 1617 году оксфордский профессор математики Генри Бригс для чисел от 1 до 1000, с восемью (позже — с четырнадцатью) знаками. Поэтому за рубежом десятичные логарифмы часто называют бригсовыми. Но в этих и в последующих изданиях таблиц обнаружились ошибки. Первое безошибочное издание на основе таблиц Георга Веги () появилось только в 1852 году в Берлине (таблицы Бремикера).
В России первые таблицы логарифмов были изданы в 1703 году при участии Л. Ф. Магницкого. В СССР выпускались несколько сборников таблиц логарифмов:
- Брадис В. М. Четырехзначные математические таблицы. М.: Дрофа, 2010, ISBN 978-5-358-07433-0. Таблицы Брадиса, издаваемые с 1921 года, использовались в учебных заведениях и в инженерных расчётах, не требующих большой точности. Они содержали мантиссы десятичных логарифмов чисел и тригонометрических функций, натуральные логарифмы и некоторые другие полезные расчётные инструменты.
- Вега Г. Таблицы семизначных логарифмов, 4-е издание, М.: Недра, 1971. Профессиональный сборник для точных вычислений.
Некоторые теоретические сведения
Напомним определение логарифма. Для этого рассмотрим показательную функцию . В левой части стоит показательная функция, если выполняются следующие условия: . Свойства показательной функции нам известны: она монотонна и принимает все положительные значения. Это значит, что любое положительное значение b функция принимает при единственном значении аргумента, то есть, уравнение имеет единственный корень, который и называется логарифмом:
Определение:
Логарифмом числа b по основанию а называется такой показатель степени, в которую нужно возвести основание а, чтобы получить число b.
Исходя из определения, имеем основное логарифмическое тождество:
То есть, любое положительное число b можно представить при помощи основного логарифмического тождества.
Рассмотрим конкретный пример: .
{\prime}=\frac{1}{x \ln 10}$8 $\int \lg x \mathrm{d} x=x \lg x-\frac{x}{\ln 10}+C$
9 $\lim _{x \rightarrow 0+} \lg x=-\infty$
Читать дальше: логарифмическая функция.
Слишком сложно?
Десятичный логарифм не по зубам? Тебе ответит эксперт через 10 минут!
Калькулятор логарифмов. Решение логарифмов онлайн
Данная страница рассматривает калькулятор логарифмов — ещё одну функцию в богатом арсенале, которым располагает бесплатный калькулятор на нашем сайте. Калькулятор, считающий логарифмы онлайн, станет незаменимым помощником для тех, кому нужно простое решение математических выражений. В нашем калькуляторе любой может легко и быстро посчитать логарифм, не зная логарифмических формул, и даже не представляя суть логарифма.
Буквально 20-30 лет назад решение логарифмов требовало серьезных знаний в математике и как минимум умения пользоваться таблицей логарифмов или логарифмической линейкой. Чтобы привести к табличному виду исходное выражение, часто приходилось осуществлять сложные преобразования, учитывая свойства логарифмов и их функций.
Сегодня же достаточно иметь доступ в интернет, чтобы без труда вычислять всевозможные логарифмические уравнения и неравенства любой сложности. Размещенный на нашем сайте калькулятор онлайн может любой логарифм вычислить за одно мгновение! Используйте этот простой способ решения — вычисление логарифмов онлайн! Лучше добавить калькулятор в закладки и в социальные сети, наверняка найдётся причина открыть его ещё раз.
Решение логарифма logyx сводится к нахождению ответа на вопрос, в какую степень требуется возвести основание логарифма y, чтобы получилось значение равное x. Онлайн калькулятор логарифмов поможет рассчитать все виды логарифмов: двоичные, десятичные и натуральные логарифмы, а также логарифм комплексного числа и логарифм отрицательного числа и др.
Вычисление логарифмов в online калькуляторе записывается как log и выполняется с помощью четырёх кнопок: нахождение двоичного логарифма, решение десятичных логарифмов, с произвольным основанием и вычисление натурального логарифма.
Кнопки, позволяющие вычислить логарифм онлайн
И десятичный логарифм калькулятор посчитает, и натуральный логарифм калькулятор найдёт!
Некоторые кнопки могут использоваться для записи одного и того же действия. Возьмём, к примеру, расчёт логарифмов с произвольным основанием. Понятно что, если указать основание 10, то рассчитается десятичный логарифм, а если 2, то двоичный. Учитывая, что математическое выражение можно и вручную набрать, тогда тот же самый десятичный логарифм посчитать можно тремя способами (точнее записать эту операцию в калькуляторе):
- 1. используя кнопку log, тогда нужно указать только число
- 2. с помощью кнопки logyx, через запятую указываются число и основание логарифма
- 3. внести обозначение логарифма вручную
Подробная информация о том, как работать с клавиатурой калькулятора, а также обзор всех его возможностей, можно найти на странице Функции калькулятора.
Логарифмы примеры решения в калькуляторе
Логарифм по основанию 2
Используйте эту кнопку, чтобы рассчитать логарифм, основание которого равно двум (его также называют двоичный логарифм).
В строке ввода отобразится запись log2(x) , соответственно, вам остаётся внести число, без указания основания, и произвести расчёт. В примере найден ответ, чему равен логарифм 8 по основанию 2.
Логарифм по основанию 2
Десятичный логарифм 10
Эта кнопка поможет найти логарифм числа по основанию 10.
Логарифм десятичный онлайн калькулятор обозначает записью log(x x,y). На рисунке рассчитано, чему равен десятичный логарифм числа 10000.
Логарифм по основанию 10
Натуральный логарифм
Клавишей ln выполняется решение натуральных логарифмов, основанием которых является число е. Основание натурального логарифма е — число Эйлера — равно 2.71828182845905.
Онлайн калькулятор можно определить, чему равен натуральный логарифм любого числа.
На рисунках в качестве примера найдены значения натурального логарифма: слева — ln логарифм числа 8, справа — натуральный логарифм от числа 50.Натуральные логарифмы примеры решения
Как решать логарифмы с произвольным основанием
Конечно, калькулятор, позволяет решить логарифм онлайн не только по определенному, но по любому основанию. Чтобы найти значение логарифмов с произвольным основанием для любого числа, используйте предназначенную для этого кнопочку logyx, она подставляет в строке ввода запись log(x x,y).
Определение логарифма числа
Калькулятор Инструкция — обзор основых и дополнительных функций калькулятора и общая информация о том, как пользоваться калькулятором.
Как вычислить десятичный логарифм числа. Десятичный логарифм: как вычислить
Нередко берут цифру десять. Логарифмы чисел по основанию десять именуют десятичными . При проведении вычислений с десятичным логарифмом общепринято оперировать знаком lg , а не log ; при этом число десять, определяющие основание, не указывают.
Так, заменяем log 10 105 на упрощенное lg105 ; а log 10 2 на lg2 .Для десятичных логарифмов типичны те же особенности, которые есть у логарифмов при основании, большем единицы. А именно, десятичные логарифмы характеризуются исключительно для положительных чисел. Десятичные логарифмы чисел, больших единицы, положительны, а чисел, меньших единицы, отрицательны; из двух не отрицательных чисел большему эквивалентен и больший десятичный логарифм и т. д. Дополнительно, десятичные логарифмы имеют отличительные черты и своеобразные признаки, которыми и поясняется, зачем в качестве основания логарифмов комфортно предпочитать именно цифру десять.
Перед тем как разобрать эти свойства, ознакомимся с нижеследующими формулировками.
Целая часть десятичного логарифма числа а именуется характеристикой , а дробная — мантиссой этого логарифма.
Характеристика десятичного логарифма числа а указывается как , а мантисса как {lg а }.
Возьмем, скажем, lg 2 ≈ 0,3010.Соответственно = 0, {lg 2} ≈ 0,3010.
Подобно и для lg 543,1 ≈2,7349. Соответственно, = 2, {lg 543,1}≈ 0,7349.
Достаточно повсеместно употребляется вычисление десятичных логарифмов положительных чисел по таблицам.
Характерные признаки десятичных логарифмов.
Первый признак десятичного логарифма. целого не отрицательного числа, представленного единицей со следующими нулями, есть целое положительное число, равное численности нулей в записи выбранного числа.
Возьмем, lg 100 = 2, lg 1 00000 = 5.
Обобщенно, если
То а = 10 n , из чего получаем
lg a = lg 10 n = n lg 10 = п .
Второй признак. Десятичный логарифм положительной десятичной дроби , показанный единицей с предыдущими нулями, равен — п , где п — численность нулей в представлении этого числа, учитывая и нуль целых.
Рассмотрим, lg 0,001 = — 3, lg 0,000001 =-6.
Обобщенно, если
,
То a = 10 -n и получается
lga= lg 10 n =-n lg 10 =-п
Третий признак. Характеристика десятичного логарифма не отрицательного числа, большего единицы, равна численности цифр в целой части этого числа исключая одну.
Разберем данный признак 1) Характеристика логарифма lg 75,631 приравнена к 1.
И правда, 10
lg 10
1 .
Отсюда следует,
lg 75,631 = 1 +б,
Смещение запятой в десятичной дроби вправо или влево равнозначно операции перемножения этой дроби на степень числа десять с целым показателем п (положительным или отрицательным). И следовательно, при смещении запятой в положительной десятичной дроби влево или вправо мантисса десятичного логарифма этой дроби не меняется.
Так, {lg 0,0053} = {lg 0,53} = {lg 0,0000053}.
Степень отдельно взятого числа называется математическим термином, придуманным несколько столетий назад.
В геометрии и алгебре встречается два варианта — десятичные и натуральные логарифмы. Они рассчитываются разными формулами, при этом уравнения, отличающиеся написанием, всегда равны друг другу. Это тождество характеризует свойства, которые относятся к полезному потенциалу функции.Особенности и важные признаки
На данный момент различают десять известных математических качеств. Самыми распространенными и востребованными из них являются:
- Подкоренной log, разделенный на величину корня, всегда такой же, как и десятичный логарифм √.
- Произведение log всегда равно сумме производителя.
- Lg = величине степени, перемноженной на число, которое в нее возводится.
- Если от log делимого отнять делитель, получится lg частного.
Кроме того, есть уравнение, основанное на главном тождестве (считается ключевым), переход к обновленному основанию и несколько второстепенных формул.
Вычисление десятичного логарифма — довольно специфическая задача, поэтому к интегрированию свойств в решение необходимо подходить осторожно и регулярно проверять свои действия и последовательность.
Нельзя забывать и о таблицах, с которыми нужно постоянно сверяться, и руководствоваться только найденными там данными.Разновидности математического термина
Главные отличия математического числа «спрятаны» в основании (a). Если оно имеет показатель 10, то это десятичный log. В обратном случае «a» преобразуется в «у» и обладает трансцендентными и иррациональными признаками. Также стоит отметить, что натуральная величина рассчитывается специальным уравнением, где доказательством становится теория, изучаемая за пределами школьной программы старших классов.
Логарифмы десятичного типа получили широкое применение при вычислении сложных формул. Составлены целые таблицы, облегчающие расчеты и наглядно показывающие процесс решения задачи. При этом перед непосредственным переходом к делу нужно возвести log в К тому же в каждом магазине школьных принадлежностей можно найти специальную линейку с нанесенной шкалой, помогающей решить уравнение любой сложности.
Десятичный логарифм числа называется Бригговым, или цифрой Эйлера, в честь исследователя, который первым опубликовал величину и обнаружил противопоставление двух определений.
Два вида формулы
Все типы и разновидности задач на вычисление ответа, имеющие в условии термин log, обладают отдельным названием и строгим математическим устройством. Показательное уравнение является практически точной копией логарифмических расчетов, если смотреть со стороны правильности решения. Просто первый вариант включает в себя специализированное число, помогающее быстрее разобраться в условии, а второй заменяет log на обыкновенную степень. При этом вычисления с применением последней формулы должны включать в себя переменное значение.
Разница и терминология
Оба главных показателя обладают собственными особенностями, отличающими числа друг от друга:
- Десятичный логарифм. Важная деталь числа — обязательное наличие основания. Стандартный вариант величины равен 10. Маркируется последовательностью — log x или lg x.
- Натуральный. Если его основанием является знак «e», представляющий собой константу, идентичную строго рассчитанному уравнению, где n стремительно движется к бесконечности, то приблизительный размер числа в цифровом эквиваленте составляет 2. 72. Официальная маркировка, принятая как в школьных, так и в более сложных профессиональных формулах, — ln x.
- Разные. Кроме основных логарифмов встречаются шестнадцатиричные и двоичные виды (основание 16 и 2 соответственно). Есть еще сложнейший вариант с базовым показателем 64, подпадающий под систематизированное управление адаптивного типа, с геометрической точностью производящее расчет итогового результата.
Терминология включает в себя следующие величины, входящие в алгебраическую задачу:
- значение;
- аргумент;
- основание.
Вычисление log числа
Есть три способа быстро и в устной форме сделать все необходимые расчеты по нахождению интересующего результата с обязательным правильным итогом решения. Изначально приближаем десятичный логарифм к своему порядку (научная запись числа в степени). Каждую положительную величину можно задать уравнением, где она будет равен мантиссе (цифра от 1 до 9), перемноженной на десятку в n-й степени.
Такой вариант подсчета создан на основе двух математических фактов:- произведение и сумма log всегда имеют одинаковый показатель;
- логарифм, взятый из числа от одного до десяти, не может превышать величину в 1 пункт.
- Если ошибка в вычислении все-таки происходит, то она никогда не бывает меньше одного в сторону вычитания.
- Точность повышается, если учесть, что lg с основанием три имеет итоговый результат — пять десятых от единицы. Поэтому любое математическое значение больше 3 автоматически добавляет к ответу один пункт.
- Практически идеальная точность достигается, если под рукой есть специализированная таблица, которую можно легко применять в своих оценочных действиях. С ее помощью можно выяснить, чему равен десятичный логарифм до десятых процентов от оригинального числа.
История вещественного log
Шестнадцатый век остро испытывал потребности в более сложных исчислениях, чем было известно науке того времени. Особенно это касалось деления и умножения многозначных цифр с большой последовательностью, в том числе дробей.
В конце второй половины эпохи сразу несколько умов пришли к выводу о сложении чисел с помощью таблицы, которая сопоставляла две и геометрическую. При этом все базовые расчеты должны были упираться в последнюю величину. Таким же образом ученые интегрировали и вычитание.
Первое упоминание об lg состоялось в 1614 году. Это сделал любитель-математик по фамилии Непер. Стоит отметить, что, несмотря на огромную популяризацию полученных результатов, в формуле была сделана ошибка из-за незнаний некоторых определений, появившихся позже. Она начиналась с шестого знака показателя. Наиболее близки к пониманию логарифма были братья Бернулли, а дебютное узаконивание произошло в восемнадцатом столетии Эйлером. Он же и распространил функцию в область образования.
История комплексного log
Дебютные попытки интегрировать lg в широкие массы делали на заре 18-го века Бернулли и Лейбниц. Но целостных теоретических выкладок они так и не сумели составить. По этому поводу велась целая дискуссия, но точного определения числу не присваивали.
Позже диалог возобновился, но уже между Эйлером и Даламбером.Последний был в принципе согласен со множеством фактов, предлагаемых основателем величины, но считал, что положительный и отрицательный показатели должны быть равны. В середине столетия формула была продемонстрирована в качестве окончательного варианта. Кроме того, Эйлером была опубликована производная десятичного логарифма и составлены первые графики.
Таблицы
Свойства числа указывают на то, что многозначные цифры можно не перемножать, а найти их log и сложить посредством специализированных таблиц.
Особенно ценным этот показатель стал для астрономов, которые вынуждены работать с большим набором последовательностей. В советское время десятичный логарифм искали в сборнике Брадиса, выпущенного в 1921 году. Позже, в 1971 году, появилось издание Веги.
Добро пожаловать в калькулятор логарифмов онлайн.
Для чего нужен этот калькулятор. Ну, в первую очередь для того, что бы свериться со своими письменными или умственными расчетами.
С логарифмами (в российских школах) столкнуться можно уже в 10-том классе. И эта тема считается достаточно сложной. Решение логарифмов, особенно с большими или дробными числами, знаете ли, дело не легкое. Уж лучше перестраховаться и воспользоваться калькулятором. При заполнении будьте внимательны, не перепутайте основание с числом. Калькулятор логарифмов чем то, схож с калькулятором факториалов, который автоматически выдает несколько решений.
В данном калькуляторе, вам предстоит заполнить всего два поля. Поле для числа и поле для основания. Ну что ж, давайте попробуем обуздать калькулятор на практике. К примеру, вам нужно найти log 2 8 (логарифм 8-ми по основанию 2 или логарифм по основанию 2 числа 8, не пугайтесь разного произношения). Итак, вводим 2 в поле «введите основание», а 8 вводим в поле «введите число». После чего нажимаем «найти логарифм» или enter. Далее калькулятор логарифмов логарифмирует заданное выражение и выводит на ваши экраны такой результат.Калькулятор логарифмов (вещественных) – этот калькулятор находит логарифм по заданному основанию онлайн.
Калькулятор десятичных логарифмов — это калькулятор, который ищет десятичный логарифм с основанием 10 онлайн.
Калькулятор натуральных логарифмов — этот калькулятор, который ищет логарифм по основанию e онлайн.
Калькулятор двоичных логарифмов – это калькулятор, который находит логарифм по основанию 2 онлайн.Немного теории. Понятие вещественного логарифма: Существует множество разных определений логарифма. Сперва, неплохо было бы узнать, что логарифм — это некая алгебраическая запись, обозначенная как log a b, где а – основание, b – число. А читается эта запись так: Логарифм по основанию a числа b. Иногда используется обозначение log b .
Основание, то есть «а» всегда находится внизу. Так как оно всегда возводится в степень.
А теперь собственно, определение самого логарифма:
Логарифмом положительного числа b по основанию a (где a>0, a≠1)называется степень, в которую нужно возвести число а, чтобы получить число b. Кстати, не только основание должно быть в положительной форме. Число(аргумент), так же должно быть положительным. В противном случае калькулятор логарифмов включит неприятную тревогу. Логарифмирование – это операция нахождения логарифма, по заданному основанию. Эта операция является обратной по отношению к возведению в степень с соответствующим основанием. Сравните:Возведение в степень
Логарифмирование
log 10 1000 = 3;
log 03 0,0081=4;
А операция обратная логарифмированию это – Потенцирование.
Помимо вещественного логарифма, основанием которого может быть какое угодно число(помимо отрицательных чисел, нуля и единицы), существует логарифмы с постоянным основанием. Например, десятичный логарифм.
Десятичный логарифм числа – это логарифм с основанием 10, который записывается как lg6, или lg14. Выглядит как орфографическая ошибка или даже как опечатка, в которой пропущена латинская буква «о».
Натуральный логарифм – это логарифм с основанием равный числу е, например ln7, ln9, е≈2,7. Существует еще двоичный логарифм, который не так важен в математике, как в теории информации и информатике. Основанием двоичного логарифма является 2. Например: log 2 10.
Десятичные и натуральные логарифмы обладают теми же свойствами, что и логарифмы чисел с любым положительным основанием.Логарифмирование — это операция, обратная возведению в степень. Если вы задаетесь вопросом, в какую степень нужно возвести 2, чтобы получить 10, то вам на помощь придет логарифм.
Обратная операция для возведения в степень
Возведение в степень — это повторяющееся умножение. Для возведения двойки в третью степень нам потребуется вычислить выражение 2 × 2 × 2. Обратная операция для умножения — это деление. Если верно выражение, что a × b = c, то обратное выражение b = a / c так же верно.
Но как обратить возведение в степень? Задача обращения умножения имеет элегантное решение благодаря простому свойству, что a × b = b × a. Однако a b не равно b a , за исключением единственного случая, когда 2 2 = 4 2 . В выражении a b = с, мы можем выразить a как корень b-ой степени из c, но как выразить b? Вот тут на сцене и появляются логарифмы.Понятие логарифма
Давайте попробуем решить простое уравнение вида 2 x = 16. Это показательное уравнение, так как нам требуется отыскать показатель степени. Для более простого понимания поставим задачу так: сколько раз нужно умножить двойку на саму себя, чтобы в результате получить 16? Очевидно, что 4, поэтому корень данного уравнения x = 4.
Теперь попробуем решить 2 x = 20. Сколько раз нужно умножить двойку на саму себя, что бы получить 20? Это сложно, ведь 2 4 = 16, а 2 5 = 32. Рассуждая логически, корень этого уравнения располагается между 4 и 5, причем ближе к 4, возможно 4,3? Математики не терпят приблизительных вычислений и хотят знать точный ответ.
Для этого они и используют логарифмы, а корнем этого уравнения будет x = log2 20.Выражение log2 20 читается как логарифм 20 по основанию 2. Это и есть ответ, которого строгим математикам достаточно. Если вы хотите выразить это число точно, то вычислите его при помощи инженерного калькулятора. В этом случае log2 20 = 4,32192809489. Это иррациональное бесконечное число, а log2 20 — его компактная запись.
Таким элегантным способом вы можете решить любое простое показательное уравнение. Например, для уравнений:
- 4 x = 125, x = log4 125;
- 12 x = 432, x = log12 432;
- 5 x = 25, x = log5 25.
Последний ответ x = log5 25 математикам не понравится. Все потому, что log5 25 легко вычисляется и является целым числом, поэтому вы обязаны его определить. Сколько раз требуется умножить 5 на само себя, чтобы получить 25? Элементарно, два раза. 5 × 5 = 5 2 = 25. Поэтому для уравнения вида 5 x = 25, x = 2.
Десятичный логарифм
Десятичный логарифм — это функция по основанию 10.
Это популярный математический инструмент, поэтому он записывается иначе. К примеру, в какую степень нужно возвести 10, чтобы получить 30? Ответом был бы log10 30, однако математики сокращают запись десятичных логарифмов и записывают его как lg30. Точно также log10 50 и log10 360 записываются как lg50 и lg360 соответственно.Натуральный логарифм
Натуральный логарифм — это функция по основанию e. В нем нет ничего натурального, и многих неофитов такая функция попросту пугает. Число e = 2,718281828 представляет собой константу, которая естественным образом возникает при описании процессов непрерывного роста. Как важно число Пи для геометрии, число e играет важную роль в моделировании временных процессов.
В какую степень нужно возвести число e, чтобы получить 10? Ответом был бы loge 10, но математики обозначают натуральный логарифм как ln, поэтому ответ будет записан как ln10. Тоже самое с выражениями loge 35 и loge 40, верная форма записи которых – ln34 и ln40.
Антилогарифм
Антилогарифм — это число, которому соответствует значение выбранного логарифма.
Простыми словами, в выражении loga b антилогарифмом считается число b a . Для десятичного логарифма lga, антилогарифм равен 10 a , а для натурального lna антилогарифм равняется e a . По сути, это тоже возведение в степень и обратная операция для логарифмирования.Физический смысл логарифма
Нахождение степеней — чисто математическая задача, но для чего нужны логарифмы в реальной жизни? В начале развития идеи логарифмирования данный математический инструмент использовался для сокращения объемных вычислений. Великий физик и астроном Пьер-Симон Лаплас говорил, что «изобретение логарифмов сократило труд астронома и удвоило его жизнь». С развитием математического инструмента были созданы целые логарифмические таблицы, при помощи которых ученые могли оперировать огромными числами, а свойства функций позволяют преобразовать выражения, оперирующие иррациональным числами в целочисленные выражения. Также логарифмическая запись позволяет представить слишком маленькие и слишком большие числа в компактном виде.
Логарифмы нашли применение и в сфере изображения графических процессов. Если требуется нарисовать график функции, которая принимает значения 1, 10, 1 000 и 100 000, то маленькие значения будут невидны и визуально они сольются в точку около нуля. Для решения подобной проблемы используются десятичный логарифм, которой позволяет построить график функции, адекватно отображающий все ее значения.
Физический же смысл логарифмирования — это описание временных процессов и изменений. Так, логарифм по основанию 2 позволяет определить, сколько требуется удвоений начального значения для достижения определенного результата. Десятичная функция используется для поиска количества необходимых удесятирений, а натуральная представляет собой время, которое необходимо для достижения заданного уровня.
Наша программа представляет собой сборник из четырех онлайн-калькуляторов, которые позволяют вычислить логарифм по любому основанию, десятичную и натуральную логарифмическую функцию, а также десятичный антилогарифм.
Для проведения вычислений вам потребуется ввести основание и число, или только число для десятичного и натурального логарифма.Примеры из реальной жизни
Школьная задача
Как было сказано выше, иррациональные значения по типу log2 345 не требуют дополнительных преобразований, и такой ответ полностью удовлетворит учителя математики. Однако если логарифм вычисляется, вы обязаны представить его в виде целого числа. Пусть вы решили 5 примеров по алгебре, и вам требуется проверить результаты на возможность целочисленного представления. Давайте проверим их при помощи калькулятора логарифма по любому основанию:
- log7 65 — иррациональное число;
- log3 243 — целое число 5;
- log5 95 — иррациональное;
- log8 512 — целое число 3;
- log2 2046 — иррациональное.
Таким образом, значения log3 243 и log8 512 вам потребуется переписать как 5 и 3 соответственно.
Потенцирование
Потенцирование — это нахождение антилогарифма числа.
Наш калькулятор позволяет найти антилогарифмы по десятичному основанию, что по смыслу означает возведение десятки в степень n. Давайте вычислим антилогарифмы для следующих значений n:- для n = 1 antlog = 10;
- для n = 1,5 antlog = 31,623;
- для n = 2,71 antlog = 512,861.
Непрерывный рост
Натуральный логарифм позволяет описывать процессы непрерывного роста. Представим, что ВВП страны Кракожия увеличилось с 5,5 миллиардов долларов до 7,8 за 10 лет. Давайте определим ежегодный прирост ВВП в процентах при помощи калькулятора натурального логарифма. Для этого нам надо подсчитать натуральный логарифм ln(7,8/5,5), что равнозначно ln(1,418). Введем это значение в ячейку калькулятора и получим результат 0,882 или 88,2% за все время. Так как ВВП рос в течение 10 лет, то ежегодный его прирост составит 88,2 / 10 = 8,82%.
Поиск количества удесятирений
Допустим, за 30 лет количество персональных компьютеров увеличилось с 250 000 до 1 миллиарда.
Сколько раз количество ПК увеличивалось в 10 раз за все это время? Для подсчета такого интересного параметра нам потребуется вычислить десятичный логарифм lg(1 000 000 000 / 250 000) или lg(4 000). Выберем калькулятор десятичного логарифма и посчитаем его значение lg(4 000) = 3,60. Получается, что с течением времени количество персональных компьютеров возрастало в 10 раз каждые 8 лет и 4 месяца.Заключение
Несмотря на сложность логарифмов и нелюбовь детей к ним в школьные годы, этот математический инструмент находит широкое применение в науке и статистике. Используйте наш сборник онлайн-калькуляторов для решения школьных заданий, а также задач из разных научных сфер.
Десятичный логарифм 0.01. Десятичный логарифм: как вычислить
Нередко берут цифру десять. Логарифмы чисел по основанию десять именуют десятичными . При проведении вычислений с десятичным логарифмом общепринято оперировать знаком lg , а не log ; при этом число десять, определяющие основание, не указывают.
Так, заменяем log 10 105 на упрощенное lg105 ; а log 10 2 на lg2 .Для десятичных логарифмов типичны те же особенности, которые есть у логарифмов при основании, большем единицы. А именно, десятичные логарифмы характеризуются исключительно для положительных чисел. Десятичные логарифмы чисел, больших единицы, положительны, а чисел, меньших единицы, отрицательны; из двух не отрицательных чисел большему эквивалентен и больший десятичный логарифм и т. д. Дополнительно, десятичные логарифмы имеют отличительные черты и своеобразные признаки, которыми и поясняется, зачем в качестве основания логарифмов комфортно предпочитать именно цифру десять.
Перед тем как разобрать эти свойства, ознакомимся с нижеследующими формулировками.
Целая часть десятичного логарифма числа а именуется характеристикой , а дробная — мантиссой этого логарифма.
Характеристика десятичного логарифма числа а указывается как , а мантисса как {lg а }.
Возьмем, скажем, lg 2 ≈ 0,3010.Соответственно = 0, {lg 2} ≈ 0,3010.
Подобно и для lg 543,1 ≈2,7349. Соответственно, = 2, {lg 543,1}≈ 0,7349.
Достаточно повсеместно употребляется вычисление десятичных логарифмов положительных чисел по таблицам.
Характерные признаки десятичных логарифмов.
Первый признак десятичного логарифма. целого не отрицательного числа, представленного единицей со следующими нулями, есть целое положительное число, равное численности нулей в записи выбранного числа.
Возьмем, lg 100 = 2, lg 1 00000 = 5.
Обобщенно, если
То а = 10 n , из чего получаем
lg a = lg 10 n = n lg 10 = п .
Второй признак. Десятичный логарифм положительной десятичной дроби , показанный единицей с предыдущими нулями, равен — п , где п — численность нулей в представлении этого числа, учитывая и нуль целых.
Рассмотрим, lg 0,001 = — 3, lg 0,000001 =-6.
Обобщенно, если
,
То a = 10 -n и получается
lga= lg 10 n =-n lg 10 =-п
Третий признак. Характеристика десятичного логарифма не отрицательного числа, большего единицы, равна численности цифр в целой части этого числа исключая одну.
Разберем данный признак 1) Характеристика логарифма lg 75,631 приравнена к 1.
И правда, 10
lg 10
1 .
Отсюда следует,
lg 75,631 = 1 +б,
Смещение запятой в десятичной дроби вправо или влево равнозначно операции перемножения этой дроби на степень числа десять с целым показателем п (положительным или отрицательным). И следовательно, при смещении запятой в положительной десятичной дроби влево или вправо мантисса десятичного логарифма этой дроби не меняется.
Так, {lg 0,0053} = {lg 0,53} = {lg 0,0000053}.
Логарифмирование — это операция, обратная возведению в степень. Если вы задаетесь вопросом, в какую степень нужно возвести 2, чтобы получить 10, то вам на помощь придет логарифм.
Обратная операция для возведения в степень
Возведение в степень — это повторяющееся умножение. Для возведения двойки в третью степень нам потребуется вычислить выражение 2 × 2 × 2. Обратная операция для умножения — это деление. Если верно выражение, что a × b = c, то обратное выражение b = a / c так же верно. Но как обратить возведение в степень? Задача обращения умножения имеет элегантное решение благодаря простому свойству, что a × b = b × a. Однако a b не равно b a , за исключением единственного случая, когда 2 2 = 4 2 . В выражении a b = с, мы можем выразить a как корень b-ой степени из c, но как выразить b? Вот тут на сцене и появляются логарифмы.
Понятие логарифма
Давайте попробуем решить простое уравнение вида 2 x = 16. Это показательное уравнение, так как нам требуется отыскать показатель степени. Для более простого понимания поставим задачу так: сколько раз нужно умножить двойку на саму себя, чтобы в результате получить 16? Очевидно, что 4, поэтому корень данного уравнения x = 4.
Теперь попробуем решить 2 x = 20. Сколько раз нужно умножить двойку на саму себя, что бы получить 20? Это сложно, ведь 2 4 = 16, а 2 5 = 32. Рассуждая логически, корень этого уравнения располагается между 4 и 5, причем ближе к 4, возможно 4,3? Математики не терпят приблизительных вычислений и хотят знать точный ответ. Для этого они и используют логарифмы, а корнем этого уравнения будет x = log2 20.
Выражение log2 20 читается как логарифм 20 по основанию 2. Это и есть ответ, которого строгим математикам достаточно. Если вы хотите выразить это число точно, то вычислите его при помощи инженерного калькулятора. В этом случае log2 20 = 4,32192809489. Это иррациональное бесконечное число, а log2 20 — его компактная запись.
Таким элегантным способом вы можете решить любое простое показательное уравнение. Например, для уравнений:
- 4 x = 125, x = log4 125;
- 12 x = 432, x = log12 432;
- 5 x = 25, x = log5 25.
Последний ответ x = log5 25 математикам не понравится.
Все потому, что log5 25 легко вычисляется и является целым числом, поэтому вы обязаны его определить. Сколько раз требуется умножить 5 на само себя, чтобы получить 25? Элементарно, два раза. 5 × 5 = 5 2 = 25. Поэтому для уравнения вида 5 x = 25, x = 2.Десятичный логарифм
Десятичный логарифм — это функция по основанию 10. Это популярный математический инструмент, поэтому он записывается иначе. К примеру, в какую степень нужно возвести 10, чтобы получить 30? Ответом был бы log10 30, однако математики сокращают запись десятичных логарифмов и записывают его как lg30. Точно также log10 50 и log10 360 записываются как lg50 и lg360 соответственно.
Натуральный логарифм
Натуральный логарифм — это функция по основанию e. В нем нет ничего натурального, и многих неофитов такая функция попросту пугает. Число e = 2,718281828 представляет собой константу, которая естественным образом возникает при описании процессов непрерывного роста. Как важно число Пи для геометрии, число e играет важную роль в моделировании временных процессов.
В какую степень нужно возвести число e, чтобы получить 10? Ответом был бы loge 10, но математики обозначают натуральный логарифм как ln, поэтому ответ будет записан как ln10. Тоже самое с выражениями loge 35 и loge 40, верная форма записи которых – ln34 и ln40.
Антилогарифм
Антилогарифм — это число, которому соответствует значение выбранного логарифма. Простыми словами, в выражении loga b антилогарифмом считается число b a . Для десятичного логарифма lga, антилогарифм равен 10 a , а для натурального lna антилогарифм равняется e a . По сути, это тоже возведение в степень и обратная операция для логарифмирования.
Физический смысл логарифма
Нахождение степеней — чисто математическая задача, но для чего нужны логарифмы в реальной жизни? В начале развития идеи логарифмирования данный математический инструмент использовался для сокращения объемных вычислений. Великий физик и астроном Пьер-Симон Лаплас говорил, что «изобретение логарифмов сократило труд астронома и удвоило его жизнь».
С развитием математического инструмента были созданы целые логарифмические таблицы, при помощи которых ученые могли оперировать огромными числами, а свойства функций позволяют преобразовать выражения, оперирующие иррациональным числами в целочисленные выражения. Также логарифмическая запись позволяет представить слишком маленькие и слишком большие числа в компактном виде.Логарифмы нашли применение и в сфере изображения графических процессов. Если требуется нарисовать график функции, которая принимает значения 1, 10, 1 000 и 100 000, то маленькие значения будут невидны и визуально они сольются в точку около нуля. Для решения подобной проблемы используются десятичный логарифм, которой позволяет построить график функции, адекватно отображающий все ее значения.
Физический же смысл логарифмирования — это описание временных процессов и изменений. Так, логарифм по основанию 2 позволяет определить, сколько требуется удвоений начального значения для достижения определенного результата.
Десятичная функция используется для поиска количества необходимых удесятирений, а натуральная представляет собой время, которое необходимо для достижения заданного уровня.Наша программа представляет собой сборник из четырех онлайн-калькуляторов, которые позволяют вычислить логарифм по любому основанию, десятичную и натуральную логарифмическую функцию, а также десятичный антилогарифм. Для проведения вычислений вам потребуется ввести основание и число, или только число для десятичного и натурального логарифма.
Примеры из реальной жизни
Школьная задача
Как было сказано выше, иррациональные значения по типу log2 345 не требуют дополнительных преобразований, и такой ответ полностью удовлетворит учителя математики. Однако если логарифм вычисляется, вы обязаны представить его в виде целого числа. Пусть вы решили 5 примеров по алгебре, и вам требуется проверить результаты на возможность целочисленного представления. Давайте проверим их при помощи калькулятора логарифма по любому основанию:
- log7 65 — иррациональное число;
- log3 243 — целое число 5;
- log5 95 — иррациональное;
- log8 512 — целое число 3;
- log2 2046 — иррациональное.
Таким образом, значения log3 243 и log8 512 вам потребуется переписать как 5 и 3 соответственно.
Потенцирование
Потенцирование — это нахождение антилогарифма числа. Наш калькулятор позволяет найти антилогарифмы по десятичному основанию, что по смыслу означает возведение десятки в степень n. Давайте вычислим антилогарифмы для следующих значений n:
- для n = 1 antlog = 10;
- для n = 1,5 antlog = 31,623;
- для n = 2,71 antlog = 512,861.
Непрерывный рост
Натуральный логарифм позволяет описывать процессы непрерывного роста. Представим, что ВВП страны Кракожия увеличилось с 5,5 миллиардов долларов до 7,8 за 10 лет. Давайте определим ежегодный прирост ВВП в процентах при помощи калькулятора натурального логарифма. Для этого нам надо подсчитать натуральный логарифм ln(7,8/5,5), что равнозначно ln(1,418). Введем это значение в ячейку калькулятора и получим результат 0,882 или 88,2% за все время. Так как ВВП рос в течение 10 лет, то ежегодный его прирост составит 88,2 / 10 = 8,82%.
Поиск количества удесятирений
Допустим, за 30 лет количество персональных компьютеров увеличилось с 250 000 до 1 миллиарда. Сколько раз количество ПК увеличивалось в 10 раз за все это время? Для подсчета такого интересного параметра нам потребуется вычислить десятичный логарифм lg(1 000 000 000 / 250 000) или lg(4 000). Выберем калькулятор десятичного логарифма и посчитаем его значение lg(4 000) = 3,60. Получается, что с течением времени количество персональных компьютеров возрастало в 10 раз каждые 8 лет и 4 месяца.
Заключение
Несмотря на сложность логарифмов и нелюбовь детей к ним в школьные годы, этот математический инструмент находит широкое применение в науке и статистике. Используйте наш сборник онлайн-калькуляторов для решения школьных заданий, а также задач из разных научных сфер.
Степень отдельно взятого числа называется математическим термином, придуманным несколько столетий назад. В геометрии и алгебре встречается два варианта — десятичные и натуральные логарифмы.
Они рассчитываются разными формулами, при этом уравнения, отличающиеся написанием, всегда равны друг другу. Это тождество характеризует свойства, которые относятся к полезному потенциалу функции.Особенности и важные признаки
На данный момент различают десять известных математических качеств. Самыми распространенными и востребованными из них являются:
- Подкоренной log, разделенный на величину корня, всегда такой же, как и десятичный логарифм √.
- Произведение log всегда равно сумме производителя.
- Lg = величине степени, перемноженной на число, которое в нее возводится.
- Если от log делимого отнять делитель, получится lg частного.
Кроме того, есть уравнение, основанное на главном тождестве (считается ключевым), переход к обновленному основанию и несколько второстепенных формул.
Вычисление десятичного логарифма — довольно специфическая задача, поэтому к интегрированию свойств в решение необходимо подходить осторожно и регулярно проверять свои действия и последовательность.
Нельзя забывать и о таблицах, с которыми нужно постоянно сверяться, и руководствоваться только найденными там данными.Разновидности математического термина
Главные отличия математического числа «спрятаны» в основании (a). Если оно имеет показатель 10, то это десятичный log. В обратном случае «a» преобразуется в «у» и обладает трансцендентными и иррациональными признаками. Также стоит отметить, что натуральная величина рассчитывается специальным уравнением, где доказательством становится теория, изучаемая за пределами школьной программы старших классов.
Логарифмы десятичного типа получили широкое применение при вычислении сложных формул. Составлены целые таблицы, облегчающие расчеты и наглядно показывающие процесс решения задачи. При этом перед непосредственным переходом к делу нужно возвести log в К тому же в каждом магазине школьных принадлежностей можно найти специальную линейку с нанесенной шкалой, помогающей решить уравнение любой сложности.
Десятичный логарифм числа называется Бригговым, или цифрой Эйлера, в честь исследователя, который первым опубликовал величину и обнаружил противопоставление двух определений.
Два вида формулы
Все типы и разновидности задач на вычисление ответа, имеющие в условии термин log, обладают отдельным названием и строгим математическим устройством. Показательное уравнение является практически точной копией логарифмических расчетов, если смотреть со стороны правильности решения. Просто первый вариант включает в себя специализированное число, помогающее быстрее разобраться в условии, а второй заменяет log на обыкновенную степень. При этом вычисления с применением последней формулы должны включать в себя переменное значение.
Разница и терминология
Оба главных показателя обладают собственными особенностями, отличающими числа друг от друга:
- Десятичный логарифм. Важная деталь числа — обязательное наличие основания. Стандартный вариант величины равен 10. Маркируется последовательностью — log x или lg x.
- Натуральный. Если его основанием является знак «e», представляющий собой константу, идентичную строго рассчитанному уравнению, где n стремительно движется к бесконечности, то приблизительный размер числа в цифровом эквиваленте составляет 2. 72. Официальная маркировка, принятая как в школьных, так и в более сложных профессиональных формулах, — ln x.
- Разные. Кроме основных логарифмов встречаются шестнадцатиричные и двоичные виды (основание 16 и 2 соответственно). Есть еще сложнейший вариант с базовым показателем 64, подпадающий под систематизированное управление адаптивного типа, с геометрической точностью производящее расчет итогового результата.
Терминология включает в себя следующие величины, входящие в алгебраическую задачу:
- значение;
- аргумент;
- основание.
Вычисление log числа
Есть три способа быстро и в устной форме сделать все необходимые расчеты по нахождению интересующего результата с обязательным правильным итогом решения. Изначально приближаем десятичный логарифм к своему порядку (научная запись числа в степени). Каждую положительную величину можно задать уравнением, где она будет равен мантиссе (цифра от 1 до 9), перемноженной на десятку в n-й степени.
Такой вариант подсчета создан на основе двух математических фактов:- произведение и сумма log всегда имеют одинаковый показатель;
- логарифм, взятый из числа от одного до десяти, не может превышать величину в 1 пункт.
- Если ошибка в вычислении все-таки происходит, то она никогда не бывает меньше одного в сторону вычитания.
- Точность повышается, если учесть, что lg с основанием три имеет итоговый результат — пять десятых от единицы. Поэтому любое математическое значение больше 3 автоматически добавляет к ответу один пункт.
- Практически идеальная точность достигается, если под рукой есть специализированная таблица, которую можно легко применять в своих оценочных действиях. С ее помощью можно выяснить, чему равен десятичный логарифм до десятых процентов от оригинального числа.
История вещественного log
Шестнадцатый век остро испытывал потребности в более сложных исчислениях, чем было известно науке того времени. Особенно это касалось деления и умножения многозначных цифр с большой последовательностью, в том числе дробей.
В конце второй половины эпохи сразу несколько умов пришли к выводу о сложении чисел с помощью таблицы, которая сопоставляла две и геометрическую. При этом все базовые расчеты должны были упираться в последнюю величину. Таким же образом ученые интегрировали и вычитание.
Первое упоминание об lg состоялось в 1614 году. Это сделал любитель-математик по фамилии Непер. Стоит отметить, что, несмотря на огромную популяризацию полученных результатов, в формуле была сделана ошибка из-за незнаний некоторых определений, появившихся позже. Она начиналась с шестого знака показателя. Наиболее близки к пониманию логарифма были братья Бернулли, а дебютное узаконивание произошло в восемнадцатом столетии Эйлером. Он же и распространил функцию в область образования.
История комплексного log
Дебютные попытки интегрировать lg в широкие массы делали на заре 18-го века Бернулли и Лейбниц. Но целостных теоретических выкладок они так и не сумели составить. По этому поводу велась целая дискуссия, но точного определения числу не присваивали.
Позже диалог возобновился, но уже между Эйлером и Даламбером.Последний был в принципе согласен со множеством фактов, предлагаемых основателем величины, но считал, что положительный и отрицательный показатели должны быть равны. В середине столетия формула была продемонстрирована в качестве окончательного варианта. Кроме того, Эйлером была опубликована производная десятичного логарифма и составлены первые графики.
Таблицы
Свойства числа указывают на то, что многозначные цифры можно не перемножать, а найти их log и сложить посредством специализированных таблиц.
Особенно ценным этот показатель стал для астрономов, которые вынуждены работать с большим набором последовательностей. В советское время десятичный логарифм искали в сборнике Брадиса, выпущенного в 1921 году. Позже, в 1971 году, появилось издание Веги.
Который очень прост в использовании, не требует в его интерфейсе и запускать -либо дополнительные программы. Все что от вас требуется — перейти на сайт Google и ввести соответствующий запрос в единственное поле на этой странице.
Например, для вычисления десятичного логарифма для 900 введите в поле поискового запроса lg 900 и сразу (даже без нажатия кнопки) получите 2.95424251.Используйте калькулятор, если нет доступа к поисковой системе. Это может быть и программный калькулятор из стандартного набора ОС Windows. Самый простой способ запустить его — нажать сочетание клавиш WIN +R, ввести команду calc и щелкнуть кнопку «OK». Другой способ — раскрыть меню на кнопке «Пуск» и выбрать в нем пункт «Все программы». Затем надо открыть раздел «Стандартные» и перейти в подраздел «Служебные», чтобы щелкнуть там ссылку «Калькулятор». При использовании ОС Windows 7 можно нажать клавишу WIN и ввести в поле поиска «Калькулятор», а затем щелкнуть соответствующую ссылку в результатах поиска.
Переключите интерфейс калькулятора в расширенный режим, так как в открываемом по умолчанию базовом варианте нужная вам операция не предусмотрена. Для этого раскройте в меню программы раздел «Вид» и выберите пункт « » либо «инженерный» — в зависимости от того, которая версия операционной системы установлена в вашем компьютере.
В настоящее время скидками никого не удивишь. Продавцы понимают, что скидки не являются средством повышения дохода. Наибольшую эффективность имеет не 1-2 скидки на конкретный товар, а система скидок, которая должна быть проста и понятна сотрудникам фирмы и ее покупателям.
Инструкция
Вы, наверное, заметили, что в настоящее время наиболее распространенной является , растущая при увеличении объемов продукции. В данном случае продавец разрабатывает шкалу процентов скидок, которая увеличивается при росте объемов покупок за определенный период. Например, вы купили чайник и кофеварку и получили скидку 5 %. Если в этом месяце вы купите еще и утюг, то получите скидку 8 % на все приобретенные товары. При этом полученная прибыль компании при цене со скидкой и возросшим объемом продаж должна быть не меньше, чем ожидаемая прибыль при цене без скидки и прежнем уровне продаж.
Рассчитать шкалу скидок несложно. Сначала определите объем продаж, с которого начинается предоставление скидки.
В качестве нижнего предела можно взять . Затем рассчитайте ожидаемый объем прибыли, который вы хотели бы получить на продаваемый товар. Ее верхний предел будет органичен покупательной способностью товара и его конкурентными свойствами. Максимальную скидку можно рассчитать следующим образом: (прибыль – (прибыль х минимальный объем продаж / ожидаемый объем) / цена единицы продукции.Еще одной довольно распространенной скидкой является скидка по контракту. Это может быть скидка по , при покупке определенных видов товара, а также при расчете в той или иной валюте. Иногда скидки такого плана предоставляются при покупке товара и заказе для доставки. Например, вы покупаете продукцию фирмы, заказываете транспорт в этой же компании и получаете скидку 5 % на приобретенный товар.
Величина предпраздничных и сезонных скидок определяется, исходя из стоимости товара на складе и вероятностью продажи товара по установленной цене. Обычно к таким скидкам прибегают розничные продавцы, например, при продаже одежды из коллекций прошлого сезона.
Подобными скидками пользуются супермаркеты для того, чтобы разгрузить работу магазина в вечерние часы и выходные дни. В данном случае размер скидки определяется размером упущенной выгоды при неудовлетворении покупательского спроса в часы пик.Источники:
- как рассчитать процент скидки в 2019
Вычисление логарифмов может понадобиться для нахождения значений по формулам, содержащим в качестве неизвестных переменных показатели степеней. Два вида логарифмов, в отличие от всех остальных, имеют собственные названия и обозначения — это логарифмы по основаниям 10 и число e (иррациональная константа). Рассмотрим несколько простых способов вычисления логарифма по основанию 10 — «десятичного» логарифма.
Инструкция
Используйте для вычислений , встроенный в операционную систему Windows. Для его запуска нажмите клавишу win, выберите пункт «Выполнить» в главном меню системы, введите calc и нажмите OK. В стандартном интерфейсе этой программы нет функции вычисления алгоритмов, поэтому раскройте в ее меню раздел «Вид» (или нажмите сочетание клавиш alt + «и») и выберите строку «научный» или «инженерный».
Добро пожаловать в калькулятор логарифмов онлайн.
Для чего нужен этот калькулятор. Ну, в первую очередь для того, что бы свериться со своими письменными или умственными расчетами. С логарифмами (в российских школах) столкнуться можно уже в 10-том классе. И эта тема считается достаточно сложной. Решение логарифмов, особенно с большими или дробными числами, знаете ли, дело не легкое. Уж лучше перестраховаться и воспользоваться калькулятором. При заполнении будьте внимательны, не перепутайте основание с числом. Калькулятор логарифмов чем то, схож с калькулятором факториалов, который автоматически выдает несколько решений.
В данном калькуляторе, вам предстоит заполнить всего два поля. Поле для числа и поле для основания. Ну что ж, давайте попробуем обуздать калькулятор на практике. К примеру, вам нужно найти log 2 8 (логарифм 8-ми по основанию 2 или логарифм по основанию 2 числа 8, не пугайтесь разного произношения). Итак, вводим 2 в поле «введите основание», а 8 вводим в поле «введите число». После чего нажимаем «найти логарифм» или enter. Далее калькулятор логарифмов логарифмирует заданное выражение и выводит на ваши экраны такой результат.Калькулятор логарифмов (вещественных) – этот калькулятор находит логарифм по заданному основанию онлайн.
Калькулятор десятичных логарифмов — это калькулятор, который ищет десятичный логарифм с основанием 10 онлайн.
Калькулятор натуральных логарифмов — этот калькулятор, который ищет логарифм по основанию e онлайн.
Калькулятор двоичных логарифмов – это калькулятор, который находит логарифм по основанию 2 онлайн.Немного теории. Понятие вещественного логарифма: Существует множество разных определений логарифма. Сперва, неплохо было бы узнать, что логарифм — это некая алгебраическая запись, обозначенная как log a b, где а – основание, b – число. А читается эта запись так: Логарифм по основанию a числа b. Иногда используется обозначение log b .
Основание, то есть «а» всегда находится внизу. Так как оно всегда возводится в степень.
А теперь собственно, определение самого логарифма:
Логарифмом положительного числа b по основанию a (где a>0, a≠1)называется степень, в которую нужно возвести число а, чтобы получить число b. Кстати, не только основание должно быть в положительной форме. Число(аргумент), так же должно быть положительным. В противном случае калькулятор логарифмов включит неприятную тревогу. Логарифмирование – это операция нахождения логарифма, по заданному основанию. Эта операция является обратной по отношению к возведению в степень с соответствующим основанием. Сравните:Возведение в степень
Логарифмирование
log 10 1000 = 3;
log 03 0,0081=4;
А операция обратная логарифмированию это – Потенцирование.
Помимо вещественного логарифма, основанием которого может быть какое угодно число(помимо отрицательных чисел, нуля и единицы), существует логарифмы с постоянным основанием. Например, десятичный логарифм.
Десятичный логарифм числа – это логарифм с основанием 10, который записывается как lg6, или lg14. Выглядит как орфографическая ошибка или даже как опечатка, в которой пропущена латинская буква «о».
Натуральный логарифм – это логарифм с основанием равный числу е, например ln7, ln9, е≈2,7. Существует еще двоичный логарифм, который не так важен в математике, как в теории информации и информатике. Основанием двоичного логарифма является 2. Например: log 2 10.
Десятичные и натуральные логарифмы обладают теми же свойствами, что и логарифмы чисел с любым положительным основанием.основание, свойства, формулы, функция, график
Результатом вычисления логарифма числа является показатель степени, в которую необходимо возвести одно число для получения другого.
Определение десятичного логарифма
Десятичный логарифм — это логарифм, основанием которого является число 10. Обозначается как lg и пишется следующим образом:
lg y = log10 y = x, при y>0
lg y является решением уравнения y = 10 x. Другими словами, в какую степень (x) необходимо возвести число 10, чтобы получить y.
Связь с натуральным логарифмом
lg x ≈ 0,43429 ln x
Данное соотношение получено путем перехода к новому основанию:
т.к. ln 10 ≈ 2,30259.
Свойства десятичного логарифма
Таблица десятичных логарифмов
x lg x x lg x x lg x x lg x 1 0 26 1,41497 51 1,70757 76 1,88081 2 0,30103 27 1,43136 52 1,716 77 1,88649 3 0,47712 28 1,44716 53 1,72428 78 1,89209 4 0,60206 29 1,4624 54 1,73239 79 1,89763 5 0,69897 30 1,47712 55 1,74036 80 1,90309 6 0,77815 31 1,49136 56 1,74819 81 1,90849 7 0,8451 32 1,50515 57 1,75587 82 1,91381 8 0,90309 33 1,51851 58 1,76343 83 1,91908 9 0,95424 34 1,53148 59 1,77085 84 1,92428 10 1 35 1,54407 60 1,77815 85 1,92942 11 1,04139 36 1,5563 61 1,78533 86 1,9345 12 1,07918 37 1,5682 62 1,79239 87 1,93952 13 1,11394 38 1,57978 63 1,79934 88 1,94448 14 1,14613 39 1,59106 64 1,80618 89 1,94939 15 1,17609 40 1,60206 65 1,81291 90 1,95424 16 1,20412 41 1,61278 66 1,81954 91 1,95904 17 1,23045 42 1,62325 67 1,82607 92 1,96379 18 1,25527 43 1,63347 68 1,83251 93 1,96848 19 1,27875 44 1,64345 69 1,83885 94 1,97313 20 1,30103 45 1,65321 70 1,8451 95 1,97772 21 1,32222 46 1,66276 71 1,85126 96 1,98227 22 1,34242 47 1,6721 72 1,85733 97 1,98677 23 1,36173 48 1,68124 73 1,86332 98 1,99123 24 1,38021 49 1,6902 74 1,86923 99 1,99564 25 1,39794 50 1,69897 75 1,87506 100 2 microexcel.ru
lg x 1 2 3 4 5 6 7 8 9 10 x 10 102 103 104 105 106 107 108 109 1010 microexcel.{x}=b.}
Вещественный десятичный логарифм числа b {\displaystyle b} существует, если b 0 {\displaystyle b 0} комплексный десятичный логарифм существует для всех b ≠ 0 {\displaystyle b\neq 0}. Международный стандарт ISO 31-11 обозначает его lg b {\displaystyle \lg \,b}. Примеры:
lg 1 = 0 ; lg 10 = 1 ; lg 100 = 2 {\displaystyle \lg \,1=0;\,\lg \,10=1;\,\lg \,100=2} lg 1000000 = 6 ; lg 0, 1 = − 1 ; lg 0.001 = − 3 {\displaystyle \lg \,1000000=6;\,\lg \,0{,}1=-1;\,\lg \,0{,}001=-3}
В зарубежной литературе, а также на клавиатуре калькуляторов встречаются и другие обозначения десятичного логарифма: log, Log, Log10 {\displaystyle \operatorname {log},\operatorname {Log},\operatorname {Log10} }, причём следует иметь в виду, что первые 2 варианта могут относиться и к натуральному логарифму.1. Алгебраические свойства
В нижеследующей таблице предполагается, что все значения положительны:
Существует очевидное обобщение приведённых формул на случай, когда допускаются отрицательные переменные, например:
lg | x y | = lg | x | + lg | y |, {\displaystyle \lg |xy|=\lg|x|+\lg|y|,} lg | x y | = lg | x | − lg | y |, {\displaystyle \lg \!\left|{\frac {x}{y}}\right|=\lg|x|-\lg|y|,}
Формула для логарифма произведения без труда обобщается на произвольное количество сомножителей:
lg x 1 x 2 … x n = lg x 1 + lg x 2 + ⋯ + lg x n {\displaystyle \lgx_{1}x_{2}\dots x_{n}=\lgx_{1}+\lgx_{2}+\dots +\lgx_{n}}
Вышеописанные свойства объясняют, почему применение логарифмов до изобретения калькуляторов существенно облегчало вычисления. Например, умножение многозначных чисел x, y {\displaystyle x,y} с помощью логарифмических таблиц производилось по следующему алгоритму:
По логарифму произведения найти в таблицах само произведение.
Найти в таблицах логарифмы чисел x, y {\displaystyle x,y}.{-2}\times 1{,}2=-2+\lg \,1{,}2\approx -2+0{,}079181=-1{,}920819}
Чтобы унифицировать действия с положительными и отрицательными логарифмами, у последних целая часть характеристика надчёркивалась сверху:
lg 0.012 ≈ − 2 + 0.079 181 = 2 ¯, 079181 {\displaystyle \lg \,0{,}012\approx -2+0{,}079181={\bar {2}}{,}079181}
Мантисса логарифма, выбираемая из таблиц, при таком подходе всегда положительна.2. Функция десятичного логарифма
Если рассматривать логарифмируемое число как переменную, мы получим функцию десятичного логарифма: y = lg x. {\displaystyle y=\lg \,x.} Она определена при всех x 0. {\displaystyle x 0.} Область значений: E y = − ∞ ; + ∞ {\displaystyle Ey=-\infty ;+\infty}. График этой кривой часто называется логарифмикой.
Функция монотонно возрастает, непрерывна и дифференцируема всюду, где она определена. Производная для неё даётся формулой:
d x lg x = lg e x {\displaystyle {\frac {d}{dx}}\lg \,x={\frac {\lg \,e}{x}}}
Ось ординат x = 0 {\displaystyle x=0} является вертикальной асимптотой, поскольку:
lim x → 0 + 0 lg x = − ∞ {\displaystyle \lim _{x\to 0+0}\lg \,x=-\infty }3. Применение
Логарифмы по основанию 10 до изобретения в 1970-е годы компактных электронных калькуляторов широко применялись для вычислений. Как и любые другие логарифмы, они позволяли многократно упростить и облегчить трудоёмкие расчёты, заменяя умножение на сложение, а деление на вычитание; аналогично упрощались возведение в степень и извлечение корня. Но десятичные логарифмы обладали преимуществом перед логарифмами с иным основанием: целую часть логарифма числа x {\displaystyle x} характеристику логарифма } на 1 меньше числа цифр в целой части числа x {\displaystyle x}. Например, сразу очевидно, что lg 345 {\displaystyle \lg 345} находится в промежутке 2, 3 {\displaystyle 2.3}.
Если 0 x 1 {\displaystyle 0- физической величине, принимаемой за исходную. В основе единицы лежит десятичный логарифм Единица названа в честь американского учёного Александра Белла.
- ИАТА авиакомпании Luxair. LG — автомобильный код района Люнебург Германия lg — десятичный логарифм Список статей, названия которых начинаются с LG
- объектами такими, как фотография, металлы и т. д. Вычисляется как десятичный логарифм отношения потока излучения падающего на объект, к потоку излучения
- степеней из чисел, логарифмы чисел с точностью, примерно 5 Например, вычислим квадратный корень из 1000. Десятичный логарифм этого числа равен 3
- История логарифмов как алгебраического понятия прослеживается с античных времён. Идейным источником и стимулом применения логарифмов послужил тот факт
- Под неперовым логарифмом англ. Napierian Naperian logarithm как правило, понимают натуральный логарифм Сам Джон Непер, имя которого носит функция
- Рихтер предложил для оценки силы землетрясения в его эпицентре десятичный логарифм перемещения A в микрометрах иглы стандартного сейсмографа Вуда
- постоянная Планка по порядку величины близка к 10 34 Дж с, то есть что десятичный логарифм величины ħ, выраженной в Дж с, лежит между 34, 5 и 33, 5. Тильда
- Иногда этот показатель применяется в форме pIC50 отрицательный десятичный логарифм величины IC50 такая форма применяется в случаях, когда линейный
- двоичный логарифм log2 lcm — наименьшее общее кратное в русскоязычной традиции НОК lg — десятичный логарифм log10 или двоичный логарифм log2
- ответственным за развитие мира логарифмов опубликовал 14 — значные логарифмические таблицы Arithmetica Logarithmica с десятичными логарифмами Долгое время в Англии
- Джона Непера, составил и опубликовал первые справочные таблицы десятичных логарифмов в 1617 году — 8 — значные Logarithmorum chilias prima 1624
- гравитацию иногда выражают в виде lg g, который представляет собой десятичный логарифм от значения ускорения, выраженного в системе единиц СГС, в которой
- концентрации ионов водорода используют её взятый с обратным знаком десятичный логарифм который, собственно, и является водородным показателем — pH. pH
- выражающее отношение любых двух мощностей, в десять раз превышает десятичный логарифм этого отношения. Оригинальный текст англ. The decibel may be defined
- сбрасывается автоматически натуральный и десятичный логарифмы натуральная тоже доступна через Inv и десятичная экспоненты, возведение в степень и извлечение
- В математике Характеристика кольца Характеристика логарифма — целая часть десятичного логарифма Эйлерова характеристика Метод характеристик — метод
- основания логарифма В случае логарифма с основанием 2 единицей измерения является бит, если используется натуральный логарифм — то нат, если десятичный — то
- числами 9 и 11. Основание: самой распространённой десятичной системы счисления десятичного логарифма Четвёртое треугольное число. 6, 15 Третье тетраэдральное
- для слова заяц в документе будет 0, 03 3 100 Вычислим IDF как десятичный логарифм отношения количества всех документов к количеству документов содержащих
- вычислительные приёмы. Генри Бригс опубликовал первые в мире таблицы десятичных логарифмов Logarithmorum Chilias Prima Виллеброрд Снелл в трактате De terrae
- геномные координаты. На оси Y отмечается значение, противоположенное десятичному логарифму P — значения для каждого однонуклеотидного полиморфизма. Так как полифорфизмы
- При этом для давления используется логарифмическая шкала, берётся десятичный логарифм от абсолютной величины давления — pF. Полученная кривая имеет S — образную
- выполняет четыре арифметические операции, вычисление натуральных и десятичных логарифмов и антилогарифмов, прямых и обратных тригонометрических функций
- английский математик, первым издавший логарифмические таблицы с десятичными логарифмами род. в 1556 году 1 августа — Федерико Чези, итальянский натуралист
- Логарифмический масштаб шкала — шкала, длина отрезка которой пропорциональна логарифму отношения величин, отмеченных на концах этого отрезка, в то время как
- логарифмические таблицы под названием Описание удивительной таблицы логарифмов лат. Mirifici Logarithmorum Canonis Descriptio Их использование и
- процедура вычисления функции десятичного логарифма по Бриггсу сводится к операциям сложения, вычитания и десятичного сдвига. Обобщение идеи метода Бриггса
- Меркатора в математическом анализе — ряд Тейлора для функции натурального логарифма впервые опубликованный немецким математиком Николасом Меркатором Кауфманом
- выражается в виде отношения 1000: 1 для дисплеев, десятичного логарифма 3.0D в сенситометрии, или двоичного логарифма 10 ступеней в фотографии. При количественном
Десятичный логарифм: десятичный логарифм онлайн, как посчитать десятичный логарифм без калькулятора, десятичный логарифм это, десятичный логарифм 2, таблица десятичных логарифмов, десятичный логарифм примеры решения, десятичный логарифм свойства, калькулятор логарифмов со степенями
Десятичный логарифм онлайн.
10.3. Логарифмы и экспонента Log and Exponential. Задание по теме Сумма логарифмов десятичный логарифм. Тесты, задания и уроки Алгебра, 11 класс. Задания составлены профессиональными. Десятичный логарифм это. Десятичный логарифм перевод с русского на английский Promt. Десятичный логарифм: y lg x. y x log10x. 0 2 4 6 8 10 0 2 4 6 8 10 0 0.2 0.4 0.6 0.8 1.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 X Y. Как посчитать десятичный логарифм без калькулятора. Десятичный логарифм Онлайн калькуляторы, расчеты и. Рассчитать: Этот калькулятор позволяет вычислить десятичный логарифм положительного числа и выводит решение задачи онлайн. Введите данные.
Десятичный логарифм 2.
Десятичный логарифм числа. Десятичный логарифм, Существительное десятичный логарифм десятичные логарифмы, common logarithm, decimal logarithm, Briggs logarithm.
Десятичный логарифм свойства.
Десятичный логарифм Автор24. Легко заметить, что десятичный логарифм 10 100 1000 и т.д. равен количеству нулей рядом с 1. Десятичный логарифм Логарифмы. В дальнейшем десятичный логарифм именуется просто логарифмом. Логарифм единицы равен нулю. Логарифмы чисел 10, 100, 1000 и т.д. равны 1. Функции LN и LOG для расчета натурального логарифма В EXCEL. b r ⋅ log a b. Десятичный логарифм числа – это логарифм по основанию 10 и пишут lg.
Онлайн калькулятор: Логарифм Planetcalc.
Y log10 X возвращает десятичный логарифм каждого элемента в массиве X. Функция принимает и действительные и комплексные входные. Что такое десятичный логарифм? КОРДА. Для решения задач на определение количества удесятирений применяются десятичные логарифмы. Возведение в степень и логарифм. Мы знаем, что. Логарифмы, определение логарифма, десятичный логарифм. Свойства десятичного логарифма. Т.к. логарифм по любому основанию от 1 равен 0, то и десятичный логарифм единицы равен 0 lg 1 0.
Десятичный логарифм Формулы и расчеты онлайн.
, взятый по основанию 10, носит название. § Найти и вычислить логарифм онлайн. Калькулятор. Здр. вроде как, чтобы загрузить десятичный логарифм LG 2 в регистр сопроцессора ST 0 нужно использовать команду FLDLG2. Алгебраические свойства. Что такое логарифм? Примеры вычисления логарифмов. Десятичные логарифмы. Когда нужная степень не подбирается. Область допустимых значений. Свойства логарифмов и примеры решений YouClever. Вычислить логарифм онлайн также вычислить натуральный и десятичный логарифм онлайн. При записи десятичной дроби используйте точку. Что такое логарифм Павел Бердов. Десятичный логарифм записывают упрощённой записью: log10. Например, число два можно представить, как lg 100. Эта запись верна.
Десятичные логарифмы. Свойства десятичных логарифмов.
При проведении вычислений с десятичным логарифмом общепринято оперировать знаком lg, а не log при этом число десять, определяющие основание,. Десятичный логарифм на украинский Русский Украинский. Функция log10 возвращает десятичный логарифм числа num. Следующая программа выводит десятичные логарифмы для чисел от 1 до 10: include.
Вычисление логарифмов: способы, примеры, решения.
Синонимы десятичный логарифм. Найден 1 синоним. Если синонимов недостаточно, то больше можно найти, нажимая на слова. Синонимы строкой. Сумма логарифмов десятичный логарифм задание. Алгебра. Словами, десятичный логарифм числа b есть решение уравнения 10x b. чаются и другие обозначения десятичного логарифма: log,Log,Log10. Изображение на весь экран нажать клавишу F11. Проверьте Десятичный логарифм перевод на Украинский. Смотрите примеры перевода Десятичный логарифм в предложениях, слушайте.
Log10, log10f, log10l – функции языка Си. Все о Hi Tech.
Десятичным логарифмом числа b называется логарифм числа b по основанию 10. Обозначение десятичного логарифма числа имеет вид: Десятичный. Десятичный логарифм числа Формулы с примерами formula xyz. Калькулятор вычисляет логарифм числа онлайн. Можно вводить как десятичные дроби в качестве разделителя для десятичных дробей можно. Функции LOG и EXP Интерактивный учебник по SQL SQL. Определение и формулы десятичного логарифма. ОПРЕДЕЛЕНИЕ. Десятичным логарифмом \lg b называется логарифм по основанию 10: \ \lg b. Десятичный логарифм, формулы и онлайн калькуляторы. Чисел 10, 100, 1000 равен соответвенно 1, 2, 3, и т.
Десятичный логарифм это Что такое Десятичный логарифм?.
Как вычислить десятичный логарифм при помощи элементарных арифметических операций? Не важно на каком языке. Может даже. Вычисление логарифма числа онлайн. Чему равен десятичный логарифм 100? Натуральный логарифм единицы чему равен 0. Десятичный логарифм 100 равен 2. Что такое натуральный. Log10 Десятичный логарифм Руководство по PHP. Alogab b, где b 0,a 0,a≠1. Десятичным логарифмом называется логарифм по основанию 10. Он обозначается в виде log10b logb lgb. Натуральным. Десятичный логарифм ☑️ определение, свойства и функции. Эти логарифмы называются десятичными и обозначаются lg. Например: логарифм числа 10 по основанию 10 равен 1. Иначе говоря, число 10 нужно. 1. Арифметические функции и процедуры. Delphi 5. Справочник. Десятичный логарифм по основанию 10, то есть показатель степени, в которую надо возвести 10, чтобы получить это число. Десятичный.
Онлайн вычисление десятичного логарифма калькулятор.
Характеристика и мантисса десятичного логарифма. Если основание логарифма равно 10, то логарифм называется десятичным. Вместо записи. Чему равен десятичный логарифм нуля? Ответы. Логарифмы чисел по основанию 10 называются десятичными. Для обозначения десятичных логарифмов обычно используют знак lg, а не log при этом. Десятичный логарифм: y lg x Построение графиков. Возвращает десятичный логарифм заданного. Калькулятор десятичный логарифм. А чо, там нету что ли Log X??. Re@l вне форума.
Вычислить десятичный логарифм Assembler Киберфорум.
Log10 PHP 4, PHP 5, PHP 7 log10 Десятичный логарифм Описание float log10 float $arg Возвращает десятичный логарифм arg. Список. LOG10 функция LOG10 Служба поддержки Office. Логарифмы. логарифм числа b по основанию a. Основное логарифмическое тождество: десятичный логарифм по основанию 10. Десятичный логарифм в PascalABC Помощь студентам Форум. Логарифмы, определение логарифма, десятичный логарифм, натуральный логарифм. Логарифмом числа х по основанию а, a 0, а ≠ 1 пишут.
Десятичный логарифм и его свойства SolverBook.
Принято обозначать так: lgN. Log10 NumPy PyProg. Exp z значение е основание натурального логарифма в степени z ln z натуральный логарифм log z десятичный логарифм log z,b.
десятичный логарифм 2, десятичный логарифм примеры решения, как посчитать десятичный логарифм без калькулятора
{f (x)} $. Эта функция, обратная экспоненциальной функции, называется \ underline {логарифмической функцией} для основания $ a $.Пьер-Симон Лаплас называл логарифмы: «замечательная уловка, которая, сокращая до нескольких дней многомесячный труд, удваивает срок службы астронома, и избавляет его от ошибок и отвращения, которые неотделимы от долгих вычислений ».
Log b x Log 10 2 0.301 Лог 2 2 1 Лог 2 10 3,3219 Лог 2 5 2.3219 Лог 2 20 4.3219 Лог 2 100 6,6439 Лог 2 6 2,585 Лог 2 1000 9.9658 Лог 2 15 3.9069 Лог 2 32 5 Лог 2 7 2,8074 Лог 10 20 1,301 Лог 10 10 1 Лог 10 4 0.6021 Лог 10 100 2 Лог 10 5 0,699 Лог 10 13 1.1139 Лог 10 6 0,7782 Лог 10 2 0,301 Лог 10 1 0 Лог 10 1000 3 ln (2) 0,6931 ln (0) -∞ ln (3) 1.0986 ln (20) 2.9957 ln ( 10) 2.3026 лн (1) 0 лн (э) 1 Калькулятор журнала
Укажите любые два значения для вычисления третьего в уравнении логарифма log b x = y . Он может принимать «e» в качестве базового ввода.
Связанный научный калькулятор | Калькулятор экспонентыЧто такое журнал?
Логарифм или журнал — это величина, обратная математической операции возведения в степень.Это означает, что логарифм числа — это число, до которого должно быть увеличено фиксированное основание, чтобы получить число. Обычно лог подразумевает, что используется база 10, хотя технически база может быть чем угодно. Когда основание — e, обычно пишется ln, а не log e . log 2 , двоичный логарифм, является еще одним основанием, которое обычно используется с логарифмами. Если например:
х = б у ; тогда y = log b x; где b — база
Каждая из упомянутых баз обычно используется в разных приложениях.База 10 обычно используется в науке и технике, база E — в математике и физике, а база 2 — в информатике.
Основные правила журнала
Когда аргумент логарифма является произведением двух цифр, логарифм можно переписать как сложение логарифма каждой из цифр.
журнал b (x × y) = журнал b x + журнал b y
Пример: журнал (1 × 10) = журнал (1) + журнал (10) = 0 + 1 = 1Если аргумент логарифма — дробь, логарифм можно переписать как вычитание логарифма числителя минус логарифм знаменателя.
журнал b (x / y) = журнал b x — журнал b y
Пример: журнал (10/2) = журнал (10) — журнал (2) = 1 — 0,301 = 0,699Если в аргументе логарифма есть показатель степени, показатель степени можно вынуть из логарифма и умножить.
журнал b x y = y × log b x
Пример: журнал (2 6 ) = 6 × журнал (2) = 1,806Также можно изменить основание логарифма, используя следующее правило.
Для переключения основания и аргумента используйте следующее правило.
Другие десятичные логарифмы, на которые следует обратить внимание, включают:
журнал b (1) = 0
Калькулятор логарифмов
журнал b (b) = 1
журнал b (0) = undefined
lim x → 0 + log b (x) = — ∞
ln (e x ) = x(основание натурального логарифма 2, e, 10, N)
Поиск инструмента
Логарифм
Инструмент для вычисления логарифмов. * $.
Натуральный логарифм обозначается как log или ln и основан на числе $ e \ приблизительно 2,71828 \ ldots $ (см. Десятичные дроби числа e).
Пример: $ \ log (7) = \ ln (7) \ приблизительно 1,94591 $
Некоторые люди и плохие калькуляторы используют $ \ log $ вместо $ \ log_ {10} $, поэтому убедитесь, что вы знаете, какие обозначения используются.
Как превратить логарифм по основанию N в натуральный логарифм?
Любой логарифм с основанием $ N $ может быть вычислен из натурального логарифма по формуле: $$ \ log_ {N} (x) = \ frac {\ ln (x)} {\ ln (N)} $ $
Что такое неперианский логарифм?
Неперианский логарифм — это другое название натурального логарифма (с основанием е).
Что такое десятичный логарифм (log10)?
Десятичный логарифм с записью $ \ log_ {10} $ или log10 является базовым 10 $ логарифмом . Это один из наиболее часто используемых в расчетах логарифмов и логарифмических шкал. $$ \ log_ {10} (x) = \ frac {\ ln (x)} {\ ln (10)} $$
Пример: $ \ log_ {10} (1000) = 3 $
Что такое двоичный логарифм (log2)?
Двоичный логарифм , отмеченный $ \ log_ {2} $ (или иногда $ lb $), является базовым логарифмом $ 2 $ .Этот логарифм используется в основном для компьютерных вычислений. $$ \ log_2 (x) = \ frac {\ ln (x)} {\ ln (2)} $$
Используйте приведенную выше формулу, чтобы вычислить log2 с помощью калькулятора, имеющего только ключ журнала.
Почему логарифм может преобразовывать произведение в сумму?
Любой логарифм имеет как для свойств:
— $ \ log_b (x \ cdot y) = \ log_b (x) + \ log_b (y) $ (преобразование произведения в сумму)
— $ \ log_b \ left (\ frac {x} {y} \ right) = \ log_b (x) — \ log_b (y) $ (преобразование частного в вычитание)
— $ \ log_b (x ^ a) = a \ log_b (x) $ (преобразование степени в умножение)
Какие замечательные значения функции логарифма?
Задайте новый вопросИсходный код
dCode сохраняет за собой право собственности на исходный код онлайн-инструмента «Логарифм».За исключением явной лицензии с открытым исходным кодом (обозначенной CC / Creative Commons / бесплатно), любого алгоритма «Логарифм», апплета или фрагмента (конвертер, решатель, шифрование / дешифрование, кодирование / декодирование, шифрование / дешифрование, переводчик) или любой функции «Логарифм» (вычислить, преобразовать, решить, расшифровать / зашифровать, расшифровать / зашифровать, декодировать / закодировать, перевести), написанные на любом информационном языке (Python, Java, PHP, C #, Javascript, Matlab и т. д.), без загрузки данных, скрипт, копирование -паста или доступ к API для «Логарифма» будут бесплатными, то же самое для автономного использования на ПК, планшете, iPhone или Android! dCode распространяется бесплатно и онлайн.
Нужна помощь?
Пожалуйста, посетите наше сообщество dCode Discord для запросов о помощи!
NB: для зашифрованных сообщений проверьте наш автоматический идентификатор шифра!Вопросы / комментарии
Сводка
Похожие страницы
Поддержка
Форум / Справка
Ключевые слова
логарифм, журнал, log2, log10, ln, непер, непериан, натуральный
Ссылки
Источник: https: //www.dcode.fr / логарифм
© 2021 dCode — Лучший «инструментарий» для решения любых игр / загадок / геокэшинга / CTF.Формула смены базы | Purplemath
Purplemath
Есть еще одно «правило» журнала, но это больше формула, чем правило.
Возможно, вы заметили, что в вашем калькуляторе есть ключи только для вычисления значений для общего (то есть с основанием 10) журнала и естественного (то есть с основанием e ) журнала.Ключей к другим базам нет. Некоторые студенты пытаются обойти это, «оценивая» что-то вроде «log 3 (6)» с помощью следующих нажатий клавиш:
[ LOG ] [ 3 ] [ (] [ 6 ] [) ]
Конечно, тогда они получают неправильный ответ, потому что вышеупомянутое фактически (обычно) вычисляет значение «log 10 (3) × 6».Это не то, что было задумано.
MathHelp.com
Чтобы оценить журнал с нестандартной базой, вы должны использовать формулу изменения базы:
Формула смены базы:
С практической точки зрения это правило говорит о том, что вы можете оценить журнал с нестандартной базой, преобразовав его в долю формы «(стандартный журнал аргумента), разделенный на (журнал с той же стандартной базой нестандартной базы) ».Я держу это прямо, глядя на положение вещей. В исходном журнале аргумент находится «над» базой (поскольку база имеет нижний индекс), поэтому я оставляю все так, когда разделяю их:
Вот простой пример применения этой формулы:
Журнал оценки
3 (6). Округлите ответ до трех десятичных знаков.
Аргумент — 6, основание — 3.Я подключу их к формуле смены базы, используя натуральный логарифм в качестве журнала новой базы:
Тогда ответ, округленный до трех десятичных знаков, будет:
.Я бы получил тот же окончательный ответ, если бы использовал общий журнал вместо натурального, хотя числитель и знаменатель промежуточной дроби были бы другими, чем то, что я показал выше:
Как видите, не имеет значения, какой стандартный журнал вы используете, если вы используете одну и ту же базу для числителя и знаменателя.
Хотя я показал значения числителя и знаменателя в приведенных выше расчетах, на самом деле лучше всего выполнять вычисления полностью на вашем калькуляторе. Вам не нужно беспокоиться о написании этого промежуточного шага.
На самом деле, чтобы свести к минимуму ошибки округления, лучше попытаться выполнить все шаги деления и вычисления в вашем калькуляторе за один раз. В приведенном выше вычислении вместо того, чтобы записывать первые восемь или около того десятичных знаков в значениях ln (6) и ln (3) и затем делить их, вы просто выполняете «ln (6) ÷ ln (3)» в своем калькулятор.
Вы можете получить несколько простых (но довольно бесполезных) упражнений по этой теме. Не завидуйте им; это простые пункты, пока вы держите в голове формулу смены основы. Например:
Преобразовать журнал
3 (6) в выражение с логарифмами с основанием 5.
Я не могу придумать какой-либо конкретной причины, по которой журнал base-5 может быть полезен, поэтому я думаю, что единственный смысл этих проблем — дать вам возможность попрактиковаться в использовании смены базы.Отлично; Я подключу-н-пыхтю:
Преобразуйте ln (4) в выражение, записанное в виде общего журнала.
Зачем мне это делать («в реальной жизни»), если я уже могу вычислить натуральный логарифм в моем калькуляторе? Я бы не стал; это упражнение предназначено только для практики (и простых моментов).
Я вставлю в формулу замены базы:
Так как получение фактического десятичного значения не является целью в упражнениях подобного рода (главное — преобразование с использованием изменения базы), просто оставьте ответ в виде логарифмической дроби.
Хотя приведенные выше упражнения были довольно бессмысленными, использование формулы изменения базы может быть очень удобно для поиска точек графика при построении графиков нестандартных журналов, особенно когда предполагается, что вы используете графический калькулятор.
Используйте вашу графическую утилиту для построения графика
y = log 2 ( x ).
Если бы я работал вручную, я бы использовал определение журналов, чтобы отметить, что:
- так как 2 -2 = ¼, то лог 2 (¼) = -2
- , поскольку 2 –1 = ½, тогда логарифм 2 (½) = –1
- , поскольку 2 0 = 1, тогда журнал 2 (1) = 0
- , поскольку 2 1 = 2, тогда журнал 2 (2) = 1
- , поскольку 2 2 = 4, тогда журнал 2 (4) = 2
- , поскольку 2 3 = 8, тогда журнал 2 (8) = 3
- , поскольку 2 4 = 16, тогда журнал 2 (16) = 4
А потом рисовал бы свой график от руки.
(Почему я выбрал именно эти значения x ? Потому что что-то меньшее было бы слишком крошечным для рисования вручную, а что-то большее привело бы к смехотворно широкому графику. Я выбрал значения, которые соответствуют моим потребностям.)
Но в этом случае я должен строить график с помощью своего графического калькулятора. Как я могу это сделать? (Или что, если бы я просто хотел использовать функцию «ТАБЛИЦА» моего графического калькулятора, чтобы найти несколько хороших аккуратных точек на графике?) У меня нет кнопки «log-base-two».Тем не менее, я могу ввести данную функцию в свой калькулятор, используя формулу изменения базы, чтобы преобразовать исходную функцию в то, что указано в терминах базы, которую мой калькулятор может понять. Подбрасывая монетку, выбираю натуральный логарифм:
.(Я мог бы тоже использовать общий журнал. В этом случае функция была бы « y 1 = log ( x ) / log (2)».)
В моем графическом калькуляторе после настройки окна просмотра для отображения полезных частей плоскости график будет выглядеть примерно так:
Между прочим, вы можете проверить, содержит ли график ожидаемые «аккуратные» точки (то есть точки, которые я бы вычислил вручную, как показано выше), чтобы убедиться, что изображение отображает правильный график:
URL: https: // www.purplemath.com/modules/logrules5.htm
Калькулятор логарифмов / логарифмов — [100% бесплатно]
Используйте этот калькулятор логарифмов или калькулятор логарифмов, чтобы вычислить логарифм определенного числа с произвольным основанием. Если вы ищете натуральный или десятичный логарифм, этот калькулятор логарифмов выполнит вычисления за вас. В этой статье мы узнаем, как использовать калькулятор, а также другую важную информацию, необходимую для лучшего понимания логарифмов.
Как пользоваться калькулятором журнала?
Использование этого калькулятора базы журнала — простая и легкая задача. Вместо того, чтобы вычислять логарифмы, вы вводите требуемые значения. Как и другие онлайн-калькуляторы, этот автоматически генерирует нужное значение в одно мгновение. Вот шаги, которые необходимо выполнить при использовании этого калькулятора натурального логарифма:
- Сначала введите значение логарифма, которое вы ищете, в поле «Логарифм от».
- Затем введите значение «Основание логарифма.”
- После ввода обоих требуемых значений калькулятор журнала автоматически сгенерирует необходимое значение логарифма.
Что такое логарифм?
Логарифм — это величина, обратная экспоненте. Следовательно, логарифмическая функция относится к функции, обратной экспоненте. Если вы возведете логарифм в степень y и получите x, это означает, что логарифм x с основанием y равен x. Это может показаться запутанным, если описать это словами, поэтому давайте взглянем на формулу:a y = x эквивалентно log_a (x) = y
При вычислении натурального логарифма любого заданного числа, вы должны выбрать основание, равное «е» или 2.718. Одна из наиболее распространенных логарифмических баз, используемых в математических вычислениях, — 10. Бревна с этой базой — это «натуральный логарифм». Символ ln (x) представляет собой натуральный логарифм.
Бывают случаи, когда вам нужно вычислить журнал с произвольной базой. Однако в большинстве случаев у вас есть доступ только к калькулятору натурального логарифма или калькулятору логарифма с логарифмической базой 10. В таком случае вам нужно помнить следующие правила:
- log_a (x) = ln ( x) / ln (a)
- log_a (x) = lg (x) / lg (a)
Помимо этого, существует несколько основных правил логарифмирования для операций журнала.y) = y * log_a (x)
Что такое натуральный логарифм?
В экспоненциальных логарифмах и функциях они могут иметь основание из любого числа. Но есть две специфические основы, которые используются так часто, что математики придумали для этих логарифмов уникальные названия. Это натуральный и десятичный логарифмы.
Натуральный логарифм любого числа — это логарифм числа с основанием «е», которое является математической константой.Здесь «е» относится к трансцендентному и иррациональному числу, равному 2,718281828459. Записывая натуральный логарифм x, вы пишете его как ln x или loge x. В некоторых случаях, когда число имеет неявное основание «е», запишите его как log x. Вы также можете добавить круглые скобки, чтобы было понятнее, давая вам ln (x), loge (x) или log (x).
Другое определение натурального логарифма — «любое положительное действительное число« а »как площадь под кривой y = 1 / x от 1 до a (площадь считается отрицательной, когда a <1).Это более простое определение, которое соответствует другим формулам, использующим натуральный логарифм.
Вы также можете расширить определение натурального журнала, чтобы предоставить значения журнала для всех ненулевых комплексных чисел и отрицательных чисел. Однако это приводит к функции с несколькими значениями, известной как комплексный логарифм.
Когда вы рассматриваете функцию натурального логарифма как действительную функцию действительной переменной, она становится функцией, обратной экспоненциальной функции. Большинство типов калькуляторов имеют кнопки для Log и Ln, которые символизируют базу журнала 10.Когда вы используете калькулятор, вы можете вычислить журналы в базе 10 или базе «е» одним щелчком мыши.
Что такое десятичный логарифм?
Общие журналы также известны как « бриггсовских логарифмов » в честь британского математика 17-го века, известного как Генри Бриггс. Еще в 1616–1617 годах Бриггс работал с Джоном Нэпиром, который изобрел натуральные логарифмы. Он предложил Нэпиеру изменить свои логарифмы.
Во время этих встреч они оба согласовали модификацию, предложенную Бриггсом.Вернувшись из одного из своих визитов, он опубликовал первую часть своих логарифмов.
В математике общим логарифмом называется журнал с основанием 10. Он также имеет другие названия: «десятичный логарифм » и «десятичный логарифм ». Вы можете указать десятичный логарифм с помощью символа log10 (x) или Log (x). Но последнее является неоднозначным обозначением, поскольку оно также может обозначать сложный бревно.
Если вы попытаетесь найти эту функцию на калькуляторе, это будет функция «журнала».Но большинство математиков имеют в виду натуральный логарифм всякий раз, когда пишут «журнал». Чтобы уменьшить эту двусмысленность, вместо log10 (x) запишите его как lg (x). Кроме того, вместо loge (x) напишите ln (x).
Общие журналы — это любые логарифмы с основанием 10. Помните, что система счисления — это система счисления 10. В системе 10 цифр, и вы определяете значение разряда группами по 10. Это упрощает запоминание того, что такое общие журналы.
Как раскрыть логарифм?
Если взять правило частного, правило степени и правило произведения вместе, они называются « свойств логарифмов .«Иногда вам нужно применить более одного из этих правил, чтобы расширить логарифм. Например:log b (6x / y) = log b (6x) −log b y
= log b 6 + log b x − log b y
Используйте правило степени для расширения логарифмов, которые включают дробные и отрицательные показатели. Также существует альтернативное доказательство правила частного, которое использует тот факт, что обратные числа являются отрицательными степенями:
log b (AC) = logb (AC − 1)
= logb (A) + logb (C − 1)
= logbA + (- 1) logbC
= logbA − logbC
Затем вы можете использовать правило продукта при выражении разницы или суммы журналов как журнала продукта .Хотя сначала это может показаться запутанным, практика позволяет вам взглянуть на любое логарифмическое выражение, мысленно расширить его, а затем записать окончательный ответ. Однако имейте в виду, что вы можете делать это только с корнями, частными, степенями и произведениями. Однако вы не можете сделать это с помощью вычитания или сложения внутри аргумента логарифма.
логарифмов — Как лучше всего рассчитать журнал без калькулятора?
Изящный трюк состоит в том, чтобы сначала свести проблему к вычислению журнала числа, которое очень близко к 1, а затем использовать $ \ log {(1 + x)} = \ log {\ frac {1 + y} {1-y }} $, где $ y = \ frac {x} {2 + x} $.{-4} $.
Теперь этот метод может быть повторен для еще большего числа членов, и в целом это повысит точность, но за счет усложнения формулы.
Еще один способ достичь быстрой сходимости — использовать совпадения чисел (эти два примера взяты из раздела 7.7 документа Introduction to Higher Mathematics Хуа Ло-Кенга): $$ 4 \ log {2} = \ log {\ frac {16} {15}} + \ log {3} + \ log {5} $$ $$ 2 \ log {5} = \ log {\ frac {25} {24}} + 3 \ log {2} + \ log {3} $$ $$ 4 \ log {3} = \ log {\ frac {81} {80}} + 4 \ log {2} + \ log {5} $$ Пусть $ a = \ log {\ frac {16} {15}}, b = \ log {\ frac {25} {24}}, c = \ log {\ frac {81} {80}} $, получаем $$ \ log {2} = 7a + 5b + 3c, \ log {3} = 11a + 8b + 5c, \ log {5} = 16a + 12b + 7c $$.5 $$.
Как преобразовать Ln в журнал 10
Обновлено 4 декабря 2020 г.
Автор Oxana Fox
Логарифм числа — это степень, в которую необходимо возвести основание, чтобы получить это число; например, логарифм 25 с основанием 5 равен 2, поскольку 5 2 равно 25. «Ln» обозначает натуральный логарифм, в основе которого лежит константа Эйлера, приблизительно 2,71828. Натуральные логарифмы используются не только в математике, но и в естественных науках.«Общий» логарифм имеет основу 10 и обозначается как «журнал». Следующая формула позволяет получить натуральный логарифм, используя десятичный логарифм:
\ ln (\ text {number}) = \ frac {\ log (\ text {number})} {\ log (2.71828)}
TL; DR (слишком долго; не читал)
Чтобы преобразовать число из натурального в общий журнал, используйте уравнение ln ( x ) = log ( x ) ÷ журнал (2.71828).
Проверка значения числа
Перед тем, как вычислить логарифм числа, проверьте его значение.Логарифмы определены только для чисел больше нуля, т.е. положительных и ненулевых. Однако результатом логарифма может быть любое действительное число — отрицательное, положительное или нулевое.
Вычислить общий журнал
Введите число, которое вы хотите логарифмировать на своем калькуляторе. Нажмите кнопку «журнал», чтобы вычислить общий журнал числа. Например, чтобы найти общий журнал 24, введите «24» на вашем калькуляторе и нажмите клавишу «log». Общий логарифм 24 равен 3.17805.
Вычислить общий журнал e
Введите на калькуляторе константу «e» (2,71828) и нажмите кнопку «журнал» для расчета журнала 10 :
\ log_ {10} (2,71828) = 0,43429
Преобразовать натуральный логарифм в общий журнал
Разделите десятичный логарифм числа на десятичный логарифм е, 0,43429, чтобы найти натуральный логарифм через десятичный логарифм.
Примеры решения тригонометрических уравнений примеры с ответами – Тригонометрические уравнения. Подготовка к ЕГЭ по математике.
//Урок алгебры в 10-м классе. Тема: «Примеры решения тригонометрических уравнений»
Цель урока:
- Закрепить навыки решения простейших тригонометрических уравнений.
- Сформировать понятие решения тригонометрических уравнений сводящихся к квадратным.
- Развивать умения сравнивать, выявлять закономерности, обобщать.
- Воспитывать ответственное отношение к труду.
Оборудование:
- Карточки для повторения формул решения простейших тригонометрических уравнений.
- Плакат с алгоритмом решения тригонометрических уравнений (большой на доску и каждому на стол).
Литература: Учебник Колмагорова “Алгебра и начала анализа, 10-11 класс”.
Ход урока.
I. Повторение
1. sin x = a, cos x = a, tg x = a
При каких значениях а эти уравнения имеют решения?
[sin x и cos x при /а/ 1 tg x при любом a]2. Повторить формулы решения простейших тригонометрических уравнений (на карточках):
sin x = а х = (-1)к arc sin a+ к, к z
sin x = 0
sin x = 1
sin x = -1cos x = a x=± arc cos a + 2 , n z
cos x = 0
cos x = 1
cos x = -1tg x = a x = arc tg a + n, n z
arc sin (-а) = — arc sin а
arc cos (-а) = — arc cos а
arc tg а (-а) = — arc tg аII. Проверка домашнего задания.
Игра “Поле чудес”. Правила игры несколько изменены, а название оставлено.
Правила игры.
- Учитель берет понравившееся ему высказывание или слова из песни, стихотворения, пословицу. По количеству букв в этом высказывании подбирается столько же примеров или задач так, чтобы одинаковым буквам соответствовали одинаковые ответы.
- Каждому ученику учитель дает карточку с заданиями и ученик сразу начинает решать.
- На доске записаны буквы, которые встречаются в высказывании, и под ними ответы, которые соответствуют этим буквам.
- Ниже записаны числа по порядку (по количеству букв в высказывании).
- Ученик, выполнявший задание, называет номер своей карточки и букву, под которой записан ответ.
- Учитель под числом (…) ставит букву (…). И так далее. Ученики стараются быстрее решить, чтобы получить следующую карточку.
- За правильно решенные 2-3 задания он может получить оценку. Поэтому желательно карточек иметь более чем число.
Ум хорошо, а два лучше
12 3 45 67 8 9 10 11 12 13 14 15 1 6 17а в д n z , к z , n z е л м , n z , n z , n z о р у , n z , n z , n z x ч ш , n z , n z , n z Уравнение:
, n z у cos x = -1 х = +2 n, n z м , n z x , n z o , n z p , n z o , n z ш , n z o , n z a , n z д , k z в , n x a , n z л , n z у , n z ч , n z ш , n z е Дополнительные уравнения
, n z , k z , n z , k z , n z , n z , n z , n z , n z , n z , k z , n z , k z , k z , n z , n z III. Объяснение нового.
1.
- В предыдущих параграфах были выведены формулы корней простейших тригонометрических уравнений: sin x=a, cos x=a, tg x=a
- К этим уравнениям сводятся другие тригонометрические уравнения. Для решения большинства из них требуется применение формул преобразований тригонометрических выражений.
- Сегодня на уроке мы рассмотрим уравнение, сводящиеся к квадратным.
2.
- На доске записаны уравнения:
а) 3х-8=х+6 (линейное уравнение)
б) х2+2х-15=0 (квадратное уравнение)
в) х4-5х2+4=0 (квадратное уравнение относительно х2).
г) 2 cos2x-cosx-1=0 (квадратное уравнение относительно cosx)- Какие из них являются квадратными?
- Общий вид квадратного уравнения:
ax2+bx+c=0
,
Корни квадратного уравнения, приведенного, т.е. х2+рх+q=0 можно находить по теореме Виета:
Х1+х2=-р; х1х2=q
- х4-5х2+4=0 – квадратное уравнение относительно х2. Это уравнение назвали биквадратным. Общий вид ах4+вх2+с=0, где а± 0.
- Его легко решить методом введения новой переменной, т.е. х2=а и уравнение принимает вид: а2-5а+4=0
3. Последнее уравнение тоже квадратное, относительно cosx. Для его решения введем новую переменную. Пусть y=cosx, тогда уравнение можно записать виде: 2у2-у-1=0. Получили квадратное уравнение.
Д=1+8=9;
Следовательно:
а) cosx=1 б) cosx=
х=2p n, n z , n z
, n n
Ответ: 2 n, n z; , n z
4. Решим уравнение:
Надо привести уравнение к одной функции. Для этого заменим cos2 x на 1-sin2x. Получим относительно xinx квадратное уравнение:
Пусть xinx=у, тогда 2у2+5у-3=0
Получили квадратное уравнение
Д=25+24=49
;
Следовательно:
а) б) xinx=-3 – решение не имеет
, к z
, к z
Ответ: , к z
5.
tgx-2ctgx=-1. Функции разные. Используя тождество tgx? ctgx=1, выразим , заменим ctgx через tgx.
пусть tgx=у, то у2+у-2=0 (дальше, как в предыдущем случае).
6. Для закрепления
4 xin2x- cosx-1=0
Заменим xin2x на 1- cos2x. Получим
4(1- cos2x)- cosx-1=0
4-4 cos2x- cosx-1=0
-4 cos2x- cosx+3=0
4 cos2x+ cosx-3=0пусть cosx=у, то
4у2+у-3=0
Д=1-48=49 ;
Следовательно,
а) cosx=-1 б)
х= +2 n, n z , n z
Ответ: +2 n; , n z
7. №164 (в) — cамостоятельно
2 xin2x- xinx-1=0
пусть xinx=у, то
2у2-у-1=0Д=1+8=9;
Следовательно,
а) xinx=1 б)
, n z , n z
,к z.
Ответ: , n z
, к z
№ 165(б)
2 xin2x+3 cosx=0
Заменим xin2x на 1- cos2x получим
2(1- cos2x)+3 cosx=0
2-2 cos2x+3 cosx=0
-2 cos2x+3 cosx+2=0, т.е.
2 cos2x-3 cosx-2=0пусть cosx=у, то
2у2-3у=0Д=9+16=25
;
Следовательно,
а) cosx=2 б)
решение не имеет , n z
, n z
, n z
Ответ: , n z
8.
Итог урока
Алгоритм решения тригонометрических уравнений.
- Привести уравнение к квадратному, относительно тригонометрических функций, применяя тригонометрические тождества.
- Ввести новую переменную.
- Записать данное уравнение, используя эту переменную.
- Найти корни полученного квадратного уравнения.
- Перейти от новой переменной к первоначальной.
- Решить простейшие тригонометрические уравнения.
- Записать ответ.
urok.1sept.ru
Решение простейших тригонометрических уравнений
Внимание! Предварительный просмотр слайдов используется исключительно в ознакомительных целях и может не давать представления о всех возможностях презентации. Если вас заинтересовала данная работа, пожалуйста, загрузите полную версию.
Тип урока: урок изучения новой темы.
Класс: 10 класс.
Продолжительность урока: 2 часа (130 минут).
Цели урока:
- дидактические: усвоить навык решения простейших тригонометрических уравнений и их частные случаи;
- развивающие: развитие познавательного интереса, логического мышления, интеллектуальных способностей; формирование математической речи;
- воспитательные: формировать эстетические навыки при оформлении записей в тетради и самостоятельность мышления у учащихся.
Организационный этап.
Девиз:
“Не делай никогда того, чего не знаешь, но научись всему, что следует знать”. (Пифагор)
Сегодня на уроке мы научимся решать с вами простейшие тригонометрические уравнения.
1. Актуализация опорных знаний (устная работа).
В результате выполнения задания мы повторим определения арккосинуса, арксинуса, арктангенса и арккотангенса.
1. Сформулировать определение арксинуса числа.
2. Сформулировать определение арккосинуса числа.
3. Сформулировать определение арктангенса числа.
4. Сформулировать определение арккотангенса числа.
5. С помощью тригонометрической окружности найти все значения из промежутка [-2 которые соответствуют числам , , , , arcsin 0, arcsin (Приложение 1)
6. Проверить, верно ли равенство:
7. Имеет ли смысл выражение:
2. Объяснение новой темы. Простейшие тригонометрические уравнения.
Определение. Уравнения вида f(x) = а, где а – данное число, а f(x) – одна из тригонометрических функций, называются простейшими тригонометрическими уравнениями.
1. Пусть дано простейшее уравнение cos t = a.
Данное уравнение:
a) при -1< t < 1 имеет две серии корней
t1 = arсcos a + 2k, k Z
t 2 = — arсcos a + 2m, m Z.
Эти серии можно записать так
t = ± arсcos a + 2n, n Z ;
б) при а = 1 имеет одну серию решений
t = 2n, n Z ;
в) при а = -1 имеет одну серию решений
t = + 2n, n Z ;
г) при а = 0 имеет две серии корней
t1 = + 2k, k Z
t 2 = — + 2m, m Z. Обе серии можно записать в одну серию
t= + n, n Z.
д) при а > 1 и a < -1 уравнение не имеет корней.
Задание 1. Решить уравнения:
1) cos х = ;
2) cos х = — ;
3) cos 4x = 1
4x = 2n, n Z
.
4)
,
.
5)
,
,
.
6) Решите уравнение ; укажите корни, принадлежащие промежутку [-; -2].
а)
б) сделаем выборку корней, принадлежащих промежутку [-2; -].
1) с помощью окружности
2) с помощью графика функции
Ответ: а) ; б) .
Задание 2. Найти корни уравнения:
1) a) cos x =1 б) cos x = — 1 в) cos x = 0 г) cos x =1,2 д) cos x = 0,2
2) а) б) в) г)
2. Пусть дано простейшее уравнение sin t = a.
Данное уравнение :
a) при -1< t < 1 имеет две серии корней
t1 = arсsin a + 2n, n Z
t 2 = — arсcsin a + 2n, n Z.
Эти серии можно записать так
t = ( -1)karсsin a + k, k Z ;
б) при а = 1 имеет одну серию решений
t= + 2n, n Z
в) при а = -1 имеет одну серию решений
t = — + 2n, n Z;
г) при а = 0 имеет две серии корней
t1 = 2k, k Z,
t2 = + 2m, m Z.
Обе серии можно записать в одну серию
t = n, n Z ;
д) при а > 1 и a < -1 уравнение не имеет корней.
Задание 3. Решить уравнения:
1) sin х = ;
, ; , ; , .Запишем ответ в виде одной серии x= ( -1)k+ k, k Z .
2) sin х = -;
, ; , ; , .Запишем ответ в виде одной серии x= ( -1)k ( — + k, k Z или x= ( -1)k+1+ k, k Z .
Задание 3. Найти корни уравнения :
1) a) sin x =1 б) sin x = — 1 в) sin x = 0 г) sin x =1,2 д) sin x = 0,7
2) а) б) в) г)
3. Пусть дано простейшее уравнение tg t = a.
Данное уравнение при любом а R имеет одну серию решений
х = аrctg a + n, n Z.
1) tg х =
х = аrctg + n, n Z.
x = + n, n Z.
2) tg х = ,
х = аrctg + n, n Z,
x = + n, n Z.
4. Пусть дано простейшее уравнение ctg t = a.
Данное уравнение при любом а R имеет одну серию решений
х = аrcctg a + n, n Z.
1) ctg x = 1
х = аrcctg 1 + n, n Z,
х = + n, n Z.
2) ctg x = — 1
х = аrcctg ( -1) + n, n Z,
х = — аrcctg 1 + n, n Z
х = + n, n Z.
5. Итог урока
Продолжите фразу :
- Сегодня на уроке я повторил …
- Сегодня на уроке я узнал …
- Сегодня на уроке я научился …
Вы молодцы! Каждый из вас “научись тому, что следует знать”. Формулы для решения тригонометрических уравнений записаны на карточке — информаторе. (Приложение 2)
6. Домашнее задание: п.9, пример 1-9, № 137, 139, 141, 142.
Спасибо за урок!
Литература.
- А.Н.Колмогоров Алгебра и начала анализа. 10–11 классы
- С.М. Никольский, М.К. Потапов и др “Алгебра и начала анализа 10”
urok.1sept.ru
Методическая разработка (алгебра, 10 класс) на тему: Примеры решения тригонометрических уравнений
Фамилия, имя, отчество
Морозова Елена Николаевна
Место работы
МОУ «Ильинская средняя общеобразовательная школа» Судогодского района
Должность
Учитель математики
Предмет
Математика
Тема урока
Примеры решения тригонометрических уравнений
Номер урока в теме
7-8
Базовый учебник
Колмогоров А.Н., Абрамов А.М., Дудницын Ю.П., Ивлев Б.М., Шварцбурд С.И. Алгебра и начала математического анализа. 10-11: Учебник для общеобразовательных учреждений. — М.:Просвещение, 2011
Цель урока
Создать условия для формирования умений решать уравнения разных типов
Задачи урока
Обучающие:
-проверить умения находить значения аркфункций и решать простейшие тригонометрические уравнения;
-провести классификацию предложенных тригонометрических уравнений и найти способы их решения
Развивающие:
-создать условия для самореализации возможностей учащихся по формированию умений и навыков решения уравнений
Воспитательные:
-формирование у учащихся познавательных, информационных, коммуникативных компетенций, навыков самооценки
Тип урока
комбинированный
Формы работы учащихся
Фронтальная, в парах, индивидуальная
Необходимое техническое оборудование
Мультимедийный проектор, компьютер, карточки
1. Организационный момент. (Презентация. Слайды 1 – 2. )
Слайд 1.
Французский писатель Анатоль Франс (1844 – 1924) однажды заметил: «Учиться можно только весело…Чтобы переваривать знания, надо поглощать их с аппетитом». Так вот, давайте сегодня на уроке будем следовать этому совету писателя, будем активны, внимательны, будем поглощать знания с большим желанием, ведь они пригодятся вам в вашей дальнейшей жизни.
Сегодня у нас урок по теме «Примеры решения тригонометрических уравнений».
Давайте выясним, что мы уже знаем и умеем?
Предполагаемые ответы:
— знаем определения аркфункций
— умеем находить значения аркфункций
— умеем решать простейшие тригонометрические уравнения
Чему же будет посвящен сегодняшний урок?
1. проверим умения находить значения аркфункций
и умения решать простейшие тригонометрические уравнения
2. рассмотрим решения некоторых более сложных тригонометрических уравнений.
2.Проверочная работа и проверка результатов
(Презентация. Слайды 3, 4, 5.)
Индивидуальная работа по выполению заданий. Уч-ся выдается карточка. В заданиях 1-6 найти значения аркфункций, в заданиях 7-15 решить уравнения и записать ответ
№ п/п
Задание
Ответ
Слайд 3
Самопроверка результатов:
Слайд 4
Самооценка по критериям
Критерии оценки: за каждый правильный ответ – 1 балл
14-15 баллов «5»
12-13 баллов «4»
9-11 баллов «3»
0-8 баллов «2»
Слайд 5
3.Этап усвоения новых знаний
(Презентация. Слайды 6-10 . )
Групповая работа
Учащимся предлагаются карточки, на каждой одно из 8 уравнений. Необходимо провести их классификацию, объяснив критерий отбора, привести принцип их решения (там, где это возможно)
2sin2x + sin x – 1= 0
sin2x — 3sin x cos x +2cos2 x =0
cos 5x – cos 3x = 0
6cos2x + cos x – 1 = 0
sin x — 2cos x = 0
sin x + √3cos x = 0
2sin2x -sin x cos x = cos2x
sin 5x – sin x = 0
Слайд 6
Предполагаемый результат:
№ группы
Уравнения
Критерий отбора
Способ решения
1
2sin2x + sin x – 1= 0
6cos2x + cos x – 1 = 0
Сводящиеся к квадратному
Введение новой переменной
2
sin 5x – sin x = 0
cos 5x – cos 3x = 0
Разность (сумма)
одноименных функций
Разложение на множители
3
sin x — 2cos x = 0
sin x + √3cos x = 0
Вида
Аsin x + Вcos x = 0
(Однородные 1 степ)
?
4
sin2x — 3sin x cos x +2cos2 x =0
2sin2x -sin x cos x = cos2x
Аsin2x +Вsin xcos x + +Сcos2x=0 (однородные 2 степени)
?
Слайд7
Вы не смогли предложить способы решения уравнений 3 и 4 групп. Попробуем найти их в учебнике (Работа с текстом п.11 учебника)
Предполагаемый результат: уч-ся делают ссылку на примеры 4-5 для решения уравнений 4 группы (в таблицу вносится запись)
№ группы
Уравнения
Критерий отбора
Способ решения
1
2sin2x + sin x – 1= 0
6cos2x + cos x – 1 = 0
Сводящиеся к квадратному
Введение новой переменной
2
sin 5x – sin x = 0
cos 5x – cos 3x = 0
Разность (сумма)
одноименных функций
Разложение на множители
3
sin x — 2cos x = 0
sin x + √3cos x = 0
Вида
Аsin x + Вcos x = 0
(Однородные 1 степ)
?
4
sin2x — 3sin x cos x +2cos2 x =0
2sin2x -sin x cos x = cos2x
Аsin2x +Вsin xcos x + +Сcos2x=0 (однородные 2 степени)
Обе части уравнения делим на cos2 x, получаем уравнение вида
Аtg2x +Вtg x + +С=0
Слайд 8
Давайте подумаем: нельзя ли этот прием применить к решению ур-ий 3 группы?
(в таблицу вносится запись)
№ группы
Уравнения
Критерий отбора
Способ решения
1
2sin2x + sin x – 1= 0
6cos2x + cos x – 1 = 0
Сводящиеся к квадратному
Введение новой переменной
2
sin 5x – sin x = 0
cos 5x – cos 3x = 0
Разность (сумма) одноименных функций
Разложение на множители
3
sin x — 2cos x = 0
sin x + √3cos x = 0
Вида
Аsin x + Вcos x = 0
(Однородные 1 степ)
Обе части уравнения делим на cos x, получаем уравнение вида
Аtgx +В=0
4
sin2x — 3sin x cos x +2cos2 x =0
2sin2x -sin x cos x = cos2x
Аsin2x +Вsin xcos x + +Сcos2x=0 (однородные 2 степени)
Обе части уравнения делим на cos2 x, получаем уравнение вида
Аtg2x +Вtg x + +С=0
Слайд 9
Всем учащимся выдается полученная таблица в качестве справочной
К какой группе вы отнесете следующие уравнения:
5sin2x +6cosx – 6= 0
cos 2x + cos2x + sin x cos x = 0
cos x = sin x
Слайд 10
4. Этап закрепления
Учащимся предлагается решить уравнения из таблицы (Слайд 10). При этом они работают в парах. Каждая пара решает по 1 уравнению из каждой группы, 1 ученик – одно, второй – другое, договариваясь между собой кто какое будет решать, возможна взаимопомощь.
5. Подведение итогов
Подведем итоги. Какой багаж знаний вы унесете с собой с сегодняшнего урока? Дайте самооценку своей деятельности и достигнутых результатов на уроке.
(Выставляются оценки в журнал)
6. Домашнее задание (Слайд 11)
п.11, №166(а), 170(а,б),173(а), подобрать уравнения других типов
Структура и ход урока:
Этап урока
Содержание
Деятельность учащихся
Деятельность учителя
Какие компетенции формируются
Организационный
Слайды 1-2
Комментарии к слайдам
Р.Д.:Владение навыками организации и участия в коллективной деятельности
Проверочная работа и проверка результатов
Слайд 3-5
-выполнение работы
-самопроверка
-самооценка
Хронометраж времени
Р.Д.: объективное оценивание своих учебных достижений
Этап усвоения новых знаний
Слайды 6-10
-Проводят классификацию предложенных уравнений
— ищут способы их решения
Направляет действия учащихся
П.Д.:самостоятельный выбор критериев для сравнения, сопоставления, оценки и классификации объектов
И-К.Д.:Поиск и извлечение необходимой информации в источниках различного типа
Этап закрепления
Слайд 9
Самостоятельно решают предложенные уравнения
Проверяет работы учащихся в режиме он-лайн, при необходимости оказывает помощь
П.Д.: умение самостоятельно и мотивированно организовывать свою деятельность; самостоятельное создание алгоритмов для решения поставленных задач
Подведение итогов
—
Отвечают на вопросы учителя
Задает вопросы
Р.Д.: Формулирование полученных результатов, объективное оценивание своих учебных достижений, учет мнения других людей при самооценке
Домашнее задание
Слайд11
Записывают в дневник
Комментирует задание
nsportal.ru
7 методов решения тригонометрических уравнений. | Математика и геометрия
7 методов решения тригонометрических уравнений.
Первый вопрос.
Как привести к простейшим тригонометрическим уравнениям?1) Нужно выразить тригонометрическую функцию, так чтобы можно было выполнить задание 2.
2) Найти аргумент функции по формулам.
3) Нахождение неизвестной переменной.Пример решения уравнения:
Решение:
Ответ:
Вопрос второй.
Как применяется метод замены переменной?1) Нужно привести уравнение к алгебраическому виду относительно одной из тригонометрических функций.
2) Выразить переменную через какую то неизвестную.
3) После того как мы выразили переменную, нужно решить алгебраическое уравнение.
4) Сделать обратную замену.
5) Решить уже простое тригонометрическое уравнение.Пример решения уравнения:
Решение:
Ответ:
Третий вопрос.
Как применить метод понижения порядка тригонометрического уравнения?1) Используя формулы понижения степени, нужно заменить данное уравнение на линейное:
2) Решить полученное уравнение так как мы решали в 1 и во 2 примерах.
Пример решения уравнения:
Решение:
Ответ:
Вопрос четвертый:
Как использовать однородные уравнения?1) Привести уравнение к виду:
2) Разделить обе части уравнения на
и получить уравнение относительно
3)Решить полученное уравнение известными способами.
Пример решения уравнения:
Решение:
Ответ:
Пятый метод решения.
Использование метода преобразования уравнения с помощью тригонометрических формул.1) Используя тригонометрические формулы, нужно привести уравнение к виду для решения способами 1, 2, 3, 4.
2) Решить полученное уравнение известными методами.Пример решения уравнения:
Решение:
Ответ:
Шестой вопрос.
Как разложить на множители тригонометрические уравнение?Пример решения уравнения:
Решение:
Перенесём все члены уравнения влево:
преобразуем и разложим на множители выражение в левой части уравнения:
Вопрос седьмой.
Как применить преобразование произведения в сумму?Пример решения уравнения:
Порядок вывода комментариев: По умолчаниюСначала новыеСначала старые
testent.ru
План-конспект урока по алгебре (10 класс) на тему: Примеры решения тригонометрических уравнений
Тема урока: «Примеры решения тригонометрических уравнений».
Цели и задачи урока.
Образовательные: 1. сформировать у учащихся умения решать однородные тригонометрические уравнения;
2. отработать навыки решения других видов тригонометрических уравнений.
Развивающие: 1. развивать и совершенствовать умение применять имеющиеся у учащихся знания в измененной ситуации;
2.развивать логическое мышление, умение делать выводы и обобщения.
Воспитательные: Воспитывать у учащихся аккуратность, культуру поведения, чувство ответственности.
Формы:
Индивидуальная, парная, фронтальная.
Методы:
Словесные, наглядные, информационно – коммуникативные.
Приемы:
Постепенное сокращение объяснений по мере усвоения алгоритма решения, правильная последовательность задач, контрольные упражнения как средство проверки.
Ход урока:
- Проверка д/з.
- Проверочная работа (проводится по вариантам). Условие записано на интерактивной доске.
I вариант
II вариант
1) Сформулируйте определение:
а) арксинуса числа
б) арккотангенса числа
а) арккосинуса числа
б) арктангенса
2) Для каких чисел определен
арккосинус
арксинус
3) Записать общий вид корней уравнения
sin x = a
сos x = a
4) Записать формулу корней уравнения
tg x = a
4) При каких значениях а уравнения sin x = a, сos x = a имеют решения?
- Фронтальный опрос.
Назвать решения частных случаев простейших тригонометрических уравнений. Условия записаны на интерактивной доске, решения проверяются с помощью гиперссылок.
sin x = 0
cos x = 1
sin x = 1
tg x = 0
cos x = 0
ctg x = 1
sin x = -1
cos x = -1
ctg x = 0
tg x = -1.
- Рассмотрим некоторые методы решения тригонометрических уравнений.
а) Метод замены переменных
Пример1. Решите уравнение 2sin2x + cosx – 1=0.
Решение: Запишем уравнение в виде 2(1 – cos2x) + cosx – 1=0, откуда 2cos2x – cosx – 1 = 0.
Заметим, что данное уравнение представляет собой квадратное уравнение относительно cosx. Обозначим t = cos x, получим уравнение
2t2 — t — 1 =0, корни которого t1 = 1 и t2 = —
.
Получаем два случая:
- cosx = 1, откуда x=2πk, k
- cosx = — 0,5, откуда x=
+2πn, n
.
Ответ: 2πk,
+2πn, где n,k
.
- Закрепление изученного материала.
Решите уравнение:
а) 2sin2x + 5cosx + 1 =0
б)cos2x + 3sinx + 1 =0
б) Однородные тригонометрические уравнения
Методом замены можно решать так называемые «однородные тригонометрические» уравнения.
Тригонометрическое уравнение называют однородным, если после некоторой замены полученный многочлен от двух переменных составлен из одночленов одинаковой степени.
Пример 2 Решите уравнение 5sin2x – 8sinx cosx — cos2x = — 2.
Решение: Перепишем уравнение в виде
7sin2x – 8sinx cosx + cos2x = 0.
Получили уравнение, однородное относительно sinx и cosx.
Рассмотрим два случая:
- cosx = 0, тогда 7sin2x – 8sinxּ0 + 02 =0, откуда sinx = 0, что невозможно, поскольку sin2x + cos2x =1; в этом случае корней нет.
- cosx
≠ 0, тогда разделим обе части уравнения на cos2x:
7tg2x – 8 tgx + 1 =0.
Пусть y=tgx. Получим: 7y2-8y +1=0, откуда y1 = 1, y2=
.
Осталось решить уравнения tgx = 1 и tgx = .
Ответ:
+ πm, arctg
+ πm, где m.
6) Закрепление изученного материала.
Решите уравнение:
2sin23x – 5sin3x cos3x + 3cos23x = 0.
в) Универсальная тригонометрическая подстановка
При решении тригонометрических уравнений можно использовать так называемую универсальную тригонометрическую подстановку на основе формул:
sinx =, cos x =
, tg x =
.
Если теперь ввести обозначение t = tg, то sin x =
,
cos x =
, tg x =
.
Пример 3 (учащиеся самостоятельно пробуют ввести новую переменную и решить уравнение, затем вызывается к доске один из учащихся для проверки).
Решить уравнение cos x + tg = 1.
Сделаем универсальную подстановку t=tg
, тогда
+ t = 1 ⬄ t3 – 2t2 + t = 0 ⬄ t1 = 0, t2 =1.
Таким образом:
а) tg
= 0, откуда x = 2πk, k
;
б) tg
= 1, откуда x =
.
Ответ: 2πk,
.
- Задания появляются на интерактивной доске. Также каждому учащемуся раздаются карточки с таким же заданием.
Задание заключается в следующем: среди уравнений на карточке (доске) выберите те, которые решаются
а) методом замены переменных;
б) как однородные тригонометрические уравнения;
в) с помощью универсальной тригонометрической подстановки:
- 2sin
x + cos
x = 5sin x cos x;
- cosx sin 7x = cos 3x sin5x
cosx – sin x = 0
- sin x – sin2x+sin3x – sin4x = 0
- 2cosx+3sinx+2cosx = 0
- cos
x + 3sin2x + 2
sinx cosx = 3
- sin2x —
sin2x = cos2x
- sin x + cos x = 1
- sin2x + cos22x +sin23x = 1,5
10)sin2x -2sin x -3 = 0
11)sin x + sin 3x = sin 5x – sin x
Учащиеся помечают на карточке уравнения видов а, б и в.
Результат проверяется с помощью фронтального опроса.
8. Домашнее задание: повторить конспект урока, решить отмеченные уравнения с карточки.
nsportal.ru
Решение однородных дифференциальных уравнений первого порядка: Однородные дифференциальные уравнения 1 порядка
//Однородные дифференциальные уравнения 1 порядка
Готовые ответы к примерам на однородные дифференциальные уравнения первого порядка ищут многие студенты (ДУ 1 порядка самые распространенные в обучении), далее Вы их сможете подробно разобрать. Но прежде чем перейти к рассмотрению примеров рекомендуем внимательно прочитать краткий теоретический материал.
Схема решения однородного дифференциального уравнения
Уравнения вида P(x,y)dx+Q(x,y)dy=0, где функции P(x,y) і Q(x,y) являются однородными функциями одного порядка называют однородным дифференциальным уравнением (ОДР).1. Сначала нужно применить подстановку y=z*x, где z=z(x) – новая неизвестная функция (таким образом исходное уравнение сводится к дифференциальному уравнению с разделяющимися переменными.
Вычисления однородных дифференциальных уравнений первого порядка
2. Производная произведения равна y’=(z*x)’=z’*x+z*x’=z’*x+z или в дифференциалах dy=d(zx)=z*dx+x*dz.
3. Далее подставляем новую функцию у и ее производную y’ (или dy) в ДУ с разделяющимися переменными относительно x та z.
4. Решив дифференциальное уравнение с разделяющимися переменными, сделаем обратную замену y=z*x, поэтому z= y/х, и получим общее решение (общий интеграл) дифференциального уравнения.
5. Если задано начальное условие y(x0)=y0, то находим частное решение задачи Коши. В теории все звучит легко, однако на практике не у всех так весело получается решать дифференциальные уравнения. Поэтому для углубления знаний рассмотрим распространенные примеры. На легких задачах нет особо Вас научить, поэтому сразу перейдем к более сложным.Пример 1. Решить дифференциальное уравнение
Решение: Делим правую сторону уравнения на переменную, которая стоит множителем возле производной. В результате придем к однородного дифференциального уравнения 0 порядка
И здесь многим пожалуй стало интересно, как определить порядок функции однородного уравнения?
Вопрос достаточно уместен, а ответ на него следующий:
в правую сторону подставляем вместо функции и аргумента значение t*x, t*y. При упрощении получают параметр «t» в определенном степени k, его и называют порядком уравнения. В нашем случае «t» сократится, что равносильно 0-м степени или нулевом порядке однородного уравнения.
Далее в правой стороне можем перейти к новой переменной y=zx; z=y/x .
При этом не забываем выразить производную «y» через производную новой переменной. По правилу части находим
Уравнения в дифференциалах примет вид
Совместные слагаемые в правой и левой части сокращаем и переходим к дифференциальному уравнению с разделенными переменными.
Проинтегрируем обе части ДУ
Для удобства дальнейших преобразований постоянную сразу вносим под логарифм
По свойствам логарифмов полученное логарифмическое уравнение эквивалентно следующему
Эта запись еще не решение (ответ), необходимо вернуться к выполненной замене переменных
Таким образом находят общее решение дифференциальных уравнений. Если Вы внимательно читали предыдущие уроки, то мы говорили, что схему вычисления уравнений с разделенными переменными Вы должны уметь применять свободно и такого рода уравнения придется вычислять для более сложных типов ДУ.Пример 2. Найти интеграл дифференциального уравнения
Решение:Схема вычислений однородных и сводных к ним ДУ Вам тепер знакома. Переносим переменную в правую сторону уравнения, а также в числителе и знаменателе выносим x2, как общий множитель
Таким образом получим однородное ДУ нулевого порядка.
Следующим шагом вводим замену переменных z=y/x, y=z*x, о которой постоянно будем напоминать, чтобы Вы ее заучили
После этого ДУ записываем в дифференциалах
Далее преобразуем зависимость к дифференциальному уравнению с отделенными переменными
и интегрированием решаем его.
Интегралы несложные, остальные преобразования выполнены на основе свойств логарифма. Последнее действие включает экспонирования логарифма. Наконец возвращаемся к исходной замене и записываем решение дифференциального уравнения в форме
Константа «C» принимает любое значение. Все кто учится заочно имеют проблемы на экзаменах с данным типом уравнений, поэтому просьба внимательно посмотреть и запомнить схему вычислений.Пример 3. Решить дифференциальное уравнение
Решение:Как следует из приведенной выше методики, дифференциальные уравнения такого типа решают методом введения новой переменной. Перепишем зависимость так, чтобы производная была без переменной
Далее по анализу правой части видим, что везде присутствует частка -ее и обозначаем за новую неизвестную
z=y/x, y=z*x.
Находим производную от y
С учетом замены первоначальное ДУ перепишем в виде
Одинаковые слагаемые упрощаем, а все получившие сводим к ДУ с отделенными переменными
Интегрированием обеих частей равенства
приходим к решению в виде логарифмов
Экспонируя зависимости находим общее решение дифференциального уравнения
которое после подстановки в него начальной замены переменных примет вид
Здесь С — постоянная, которую можно доопределить из условия Коши. {2}+2xy)\;dx+xy\;dy=0$$Решение:Дифференциальные уравнения. Часть 1 | Открытые видеолекции учебных курсов МГУ
Курс лекций «Дифференциальные уравнения» читается для студентов второго курса механико-математического факультета МГУ имени М. В. Ломоносова.
Курс знакомит с видами дифференциальных уравнений и методами их решений, геометрической интерпретацией уравнения первого порядка, с первыми интегралами, с теорией линейных уравнений и систем, в том числе с постоянными и периодическими коэффициентами, с вопросами существования, единственности и продолжаемости решений, их непрерывности и дифференцируемости по параметру, устойчивости по Ляпунову. Рассматриваются также вопросы существования и единственности решения задачи Коши для уравнения с частными производными первого порядка, теорема об альтернативе, периодические системы дифференциальных уравнений.
Список всех тем лекций
Лекция 1.
Введение в дифференциальные уравнения.
Определение дифференциального уравнения и смежные определения Определение поля направлений Решение дифференциального уравнения Определение интегральной кривой Примеры интегральной кривой Эквивалентность уравнения в дифференциалах и обычного дифференциального уравненияЛекция 2. Виды дифференциальных уравнений.
Продолжение доказательства с прошлой лекции Уравнение первообразной и его решение Теорема об общем решении интегрального уравнения Примеры интегралов Уравнение в полных дифференциалах и его свойства Автономные уравнения Определение точки единственности и существованияЛекция 3.
Задача Коши.
Лемма о точках единственности Пример применения леммы к эксперименту с остыванием тела Пример применения леммы к эксперименту вытекание жидкости Уравнения с разделяющимися переменными и его решение Однородные уравнения и их решения Существование и единственность решений задачи Коши Эквивалентная задаче Коши задачаЛекция 4. Задача Коши.
Доказательство эквивалентности задач Обобщение теоремы Лагранжа на многомерное пространствоЛекция 5. Задача Коши.
Завершение доказательства теоремы об эквивалентности задач и пример применения Вариации условий теоремы существования и единственности Теорема глобального решения Продолжаемость Лемма о продолжаемости решения и следствие из нееЛекция 6.
Системы дифференциальных уравнений.
Теорема о продолжаемости решения Пример применения теоремы о продолжаемости решения Линейная система дифференциальных уравнений Лемма об интегральном неравенстве (Гронуолла-Беллмана) Лемма о дифференциальном неравенстве Доказательство теоремы о решении линейной системыЛекция 7. Обобщенные дифференциальные уравнения.
Определение обобщенного дифференциального уравнения n-го порядка Каноническая замена и её свойства Теорема о изоморфности замены Локальная теорема единственности уравнения n-го порядка Глобальная теорема единственности уравнения n-го порядка Теорема о продолжаемости решения уравнения n-го порядка Линейное неоднородное уравнение n-го порядка Существование и единственность непродолжаемости решение неоднородного уравнения Уравнения неразрешенные относительно производной Теорема существования и единственности уравнения неразрешенного относительно производной Определение дискриминантного множества Теорема о связи дискриминантного множества и особого решенияЛекция 8.
Линейные дифференциальные уравнения.
Расширенная задача Коши Доказательство теоремы о связи дискриминантного множества и особого решения Нахождение дискриминантного множества для пример вытекания воды Уравнения колебаний маятника Общая теория линейных дифференциальных уравнений Теорема об изоморфизме решения линейных уравнений и n-мерным пространством Следствие из теоремы об изоморфизме решения линейных уравнений и n-мерным пространством Оператор Коши Лемма о корректном определении оператораЛекция 9. Методы решения дифференциальных уравнений.
Матрица решений дифференциального уравнения Лемма о свойствах матрицы решений Матрица Коши и ее свойства Удовлетворение оператора Коши задачи Коши Определитель Вронского Теорема об эквивалентности утверждений о линейной зависимости Формула Ляувиля-Остроградского Решение неоднородной системы дифференциальных уравнений Метод вариации постояннойЛекция 10.
Краевая задача для уравнения второго порядка.
Доказательство эквивалентности уравнений Теорема об изоморфности множества решений неоднородного уравнения и n-мерного пространства и следствие из нее Следствие из теоремы Метод вариации постоянных Определитель Вронского для линейных уравнений Формула Ляувиля-Остроградского для линейных уравнений Теорема о фундаментальной системе решений для линейных дифференциальных уравнений Теорема о связи линейной зависимости и определителя Вронского Постановка краевой задачи для уравнения второго порядка Определение вырожденной и невырожденной краевой задачиЛекция 11. Теорема об альтернативе.
Формулировка и доказательство теорема об альтернативе Нули решений однородного уравнения второго порядка Перемежающиеся нули решения Теорема о расположениях нулей однородного уравнения Теорема сравнения (Штурма) и следствия Лемма о приведении уравнения к более простому виду Примеры применения теоремы штурма Уравнение маятникаЛекция 12. Методы решения линейного дифференциального уравнения.
Определение экспоненты от матрицы Лемма о равномерной сходимости ряда экспоненты Теорема о решении линейного уравнения с постоянными коэффициентами Следствия из теоремы о решении линейного уравнения с постоянными коэффициентами Расширение теоремы на комплексной плоскости Напоминание свойств жордановой клетки Вычисление экспоненты от матрицы Теорема о комплексных решениях Определение векторного квазимногочленаЛекция 13.
Однородные и неоднородные дифференциальные уравнения.
Теорема о методе неопределенных коэффициентов Линейные однородные дифференциальные уравнения с постоянными коэффициентами Теорема о решениях однородных уравнений с постоянными коэффициентами Применение теоремы о решениях однородных уравнений с постоянными коэффициентами для уравнения колебания маятника Линейные неоднородные дифференциальные уравнения с постоянными коэффициентами Определение резонанса кратности К Теорема о существовании и единственности решения в случае резонанса Применение теоремы к уравнению колебания маятникаЛекция 14. Периодические системы дифференциальных уравнений.
Определение периодических систем дифференциальных уравнений Определение оператора монодромии Определение мультприликатора Лемма о решениях периодических систем дифференциальных уравнений Задача о поиске периодических решениях Теорема о невырожденности задачи Определение логарифма от матрицы Логарифм от жордановой клетки Формулировка теоремы Флаке-ЛяпуноваОднородные уравнения первого порядка
Понятие однородного уравнения
Дифференциальное уравнение первого порядка, представленное в стандартном виде $y’=f\left(x,y\right)$, является однородным, если его правая часть зависит не просто от переменных $x$ и $y$, а от отношения функции $y$ к независимой переменной $x$, то есть $ f (x,y) = f (x/y)$.
Зависимость функции от отношения $\frac{y}{x} $ следует понимать так, что функция не изменяется при замене в ней данного отношення на любое другое, имеющее вид $\frac{t\cdot y}{t\cdot x} $. Например, именно такое свойство имеет функция $f\left(x,y\right)=\frac{y}{x} \cdot \cos \frac{y}{x} $. Действительно, $f\left(x,y\right)=\frac{y}{x} \cdot \cos \frac{y}{x} =\frac{t\cdot y}{t\cdot x} \cdot \cos \frac{t\cdot y}{t\cdot x} $. После замены переменных $x$ и $y$ на $t\cdot x$ и $t\cdot y$ соответственно и последующего сокращения на $t$ данная функция приобретает свой исходный вид. В этом и состоит основное свойство однородного дифференциального уравнения.
Готовые работы на аналогичную тему
Общий метод решения
Однородное дифференциальное уравнение $y’=f (x/y)$ решают посредством применения замены $\frac{y}{x} =u$, где $u=u\left(x\right)$ — новая неизвестная функция. Идея состоит в том, что найдя функцию $u$ и умножив её на $x$, можно будет найти и нужную функцию $y$.
Представим замену в виде $y=u\cdot x$ и продифференцируем её: $\frac{dy}{dx} =\frac{du}{dx} \cdot x+u\cdot \frac{dx}{dx} =\frac{du}{dx} \cdot x+u$. Подставим $y$ и $\frac{dy}{dx} $ в данное дифференциальное уравнение: $\frac{du}{dx} \cdot x+u=f\left(u\right)$.
Полученное дифференциальное уравнение представляет собой уравнение с разделяющимися переменными. Действительно, после элементарных преобразований его можно представить в виде $\frac{du}{dx} =\frac{f\left(u\right)-u}{x} $, где $f_{1} \left(x\right)=\frac{1}{x} $ — функция, зависящая только от $x$, и $f_{2} \left(u\right)=f\left(u\right)-u$ — функция, зависящая только от $u$. Применим к этому дифференциальному уравнению метод решения дифференциальных уравнений с разделяющимися переменными.
Сначала вычисляем интеграл $I_{1} =\int f_{1} \left(x\right)\cdot dx $. Получаем: $I_{1} =\int \frac{1}{x} \cdot dx=\ln \left|x\right| $. Теперь записываем интеграл $I_{2} =\int \frac{du}{f_{2} \left(u\right)} $. Получаем: $I_{2} =\int \frac{du}{f\left(u\right)-u} $.
Общее решение записываем в форме $I_{2} =I_{1} +C$, то есть $\int \frac{du}{f\left(u\right)-u} =\ln \left|x\right|+C$. Правую часть полученного решения можно упростить, если представить произвольную постоянну в более удобной форме $\ln \left|C\right|$. При этом получим: $\ln \left|x\right|+\ln \left|C\right|=\ln \left|x\cdot C\right|$.Окончательно получаем: $\int \frac{du}{f\left(u\right)-u} =\ln \left|x\cdot C\right|$. После вычисления интеграла $\int \frac{du}{f\left(u\right)-u} $ и замены $u$ на $\frac{y}{x} $ общее решение данного однородного дифференциального уравнения будет найдено.
Общий метод решения можно представить в виде следующего алгоритма:
- В первую очередь убеждаемся, что решаемое дифференциальное уравнение является однородным. Для этого нужно представить его в стандартном виде $y’=f\left(x,y\right)$, после чего в функции $f\left(x,y\right)$ переменные $x$ и $y$ заменить на $t\cdot x$ и $t\cdot y$ соответственно. Если после элементарных тождественных преобразований удается вернуться к той же функции $f\left(x,y\right)$, то данное дифференциальное уравнение является однородным и $ f (x,y) = f (x/y)$. Если добиться этого оказалось невозможным, то данное дифференциальное уравнение должно решаться иным методом.
- Находим $f\left(u\right)$, выполнив для функции $f (x/y)$ замену $y=u\cdot x$, после чего записываем функцию $f\left(u\right)-u$.
- Находим интеграл $I=\int \frac{du}{f\left(u\right)-u} $ и записываем общее решение в виде $I=\ln \left|x\cdot C\right|$.
- Выполняем обратную замену $u=\frac{y}{x} $ и проводим упрощающие тождественные преобразования.
- Находим особые решения, которые могли быть утрачены при разделении переменных.
Решение типичных задач
Задача 1
Найти общее решение дифференциального уравнения $y’=2+\frac{y}{x} $.
По внешнему виду данного дифференциального уравнения его можно сразу отнести к однородному.
Для функции $f (x/y)=2+\frac{y}{x} $ выполняем замену $y=u\cdot x$ и находим $f\left(u\right)=2+\frac{u\cdot x}{x} =2+u$. Записываем функцию $f\left(u\right)-u=2+u-u=2$.
Находим интеграл $I=\int \frac{du}{f\left(u\right)-u} =\int \frac{du}{2} =\frac{u}{2} $.
Записываем общее решение в виде $\frac{u}{2} =\ln \left|x\cdot C\right|$.
Выполняем обратную замену $u=\frac{y}{x} $ и получаем $\frac{y}{2\cdot x} =\ln \left|x\cdot C\right|$ или $y=2\cdot x\cdot \ln \left|x\cdot C\right|$.
Так как $f\left(u\right)-u=2$, то особых решений данное дифференциальное уравнение не имеет.
Задача 2
Найти общее решение дифференциального уравнения $x\cdot y’=5\cdot y+x$.
Приводим данное дифференциальное уравнение к стандартному виду $y’=5\cdot \frac{y}{x} +1$, после чего можно сделать вывод, что оно является однородным.
Для функции $f (x/y)=5\cdot \frac{y}{x} +1$ выполняем замену $y=u\cdot x$ и находим $f\left(u\right)=5\cdot \frac{u\cdot x}{x} +1=5\cdot u+1$.
Записываем функцию $f\left(u\right)-u=5\cdot u+1-u=4\cdot u+1$.
Находим интеграл $I=\int \frac{du}{f\left(u\right)-u} =\int \frac{du}{4\cdot u+1} =\frac{1}{4} \cdot \ln \left|4\cdot u+1\right|$.
Записываем общее решение в виде $\frac{1}{4} \cdot \ln \left|4\cdot u+1\right|=\ln \left|x\cdot C\right|$, откуда $\ln \left|4\cdot u+1\right|=\ln \left|x\cdot C\right|^{4} $; $4\cdot u+1=x^{4} \cdot C^{4} $ или просто $4\cdot u+1=C\cdot x^{4} $.
{5} $.Уравнения, приводящиеся к однородным
При определенных условиях дифференциальное уравнение вида $y’=\frac{a_{1} \cdot x+b_{1} \cdot y+c_{1} }{a_{2} \cdot x+b_{2} \cdot y+c_{2} } $, в котором $a_{1} $, $b_{1} $, $c_{1} $, $a_{2} $, $b_{2} $, $c_{2} $ — постоянные коэффициенты, может быть приведено к однородному.
Если $\Delta \equiv \left|\begin{array}{cc} {a_{1} } & {b_{1} } \\ {a_{2} } & {b_{2} } \end{array}\right|\ne 0$, то приведение его к однородному достигается с помощью замен $x=m+\alpha $ и $y=n+\beta $, где постоянные $\alpha $ и $\beta $ следует выбрать как результат решения системы $\left\{\begin{array}{c} {a_{1} \cdot \alpha +b_{1} \cdot \beta =-c_{1} } \\ {a_{2} \cdot \alpha +b_{2} \cdot \beta =-c_{2} } \end{array}\right. $.
Так как $\Delta \ne 0$, то эта система имеет единственное решение, которое проще всего найти по формулам Крамера.
Используя найденные выражения для $x=m+\alpha $ и $y=n+\beta $, получим дифференциальное уравнение $\frac{dn}{dm} =\frac{a_{1} \cdot m+b_{1} \cdot n}{a_{2} \cdot m+b_{2} \cdot n} $, которое является однородным.
Однородные дифференциальные уравнения первого порядка
Определение 1. Однородным дифференциальным уравнением первого порядка называют уравнение, которое можно привести к виду
,
где функция не изменяется при замене х и у на tx и ty, т.е. удовлетворяет условию
.
Отметим, что функцию , которая соответствует указанному условию, называют однородной нулевого порядка.
Замечание. Однородное дифференциальное уравнение первого порядка путем подстановки можно привести к уравнению с разделяющимися переменными.
Пример 3.Найти общее решение однородного дифферен-циального уравнения первого порядка:
.
Решение. Введем подстановку
Проинтегрируем обе части
Дифференциальные уравнения второго порядка, допускающие понижение порядка
Одним из методов интегрирования дифференциальных уравнений высших порядков является метод понижения порядка.
Суть метода состоит в том, что с помощью замены переменной (подстановки) данное дифференциальное уравнение сводится к уравнению, порядок которого ниже. Рассмотрим три типа уравнений, допускающих понижение порядка.Уравнение вида
,
где – непрерывная на функция.
Решение уравнения находится понижением порядка и интегрированием.
Пример 1. Найти общее решение уравнения
.
Решение.Путем интегрирования данного уравнения получаем:
;
.
Уравнение вида
,
не содержащее искомую функциюу.
Путем подстановки ; и сводится к уравнению первого порядка относительно функции .
Пример 2. Найти общее решение уравнения
. (1)
Ведем подстановку , тогда .
Перейдем к уравнению
. (2)
Это уравнение линейное относительно р.
Пусть , а . Подставив в (2); ,
перейдем к системе
.
Решим отдельно (3) и (4).
(3): . Разделим переменные и проинтегрируем:
.
(4): ; . Разделим переменные и проинтег-рируем:
; .
Тогда
.
Возвращаясь к искомой функции у, имеем
;
.
Уравнение вида
,
не содержащее аргумент х.
Путем подстановки
или
приводится к уравнению первого порядка относительно функции р, зависящей от у.
Пример 3. Найти общее решение уравнения
.
Решение. Уравнение не содержит явный аргумент х, поэтому сделаем подстановку
, тогда
и данное уравнение примет вид
или .
Это уравнение первого порядка с разделяющимися переменными относительно функции .
Разделяя переменные, получим
.
Но , тогда или .
Отсюда получим общее решение заданного уравнения:
.
Линейные однородные уравнения с постоянными коэффициентами
Определение 1. Дифференциальное уравнение второго порядка называют линейным однородным уравнением с постоянными коэффициентами, если оно имеет вид
, где . (1)
Решение уравнения (1)будем искать в виде (2). Тогда подставив (2) в (1) вместо , уравнение (1) обращается в тождество
; ,
после сокращения на имеем . Функция будет решением уравнения (1) тогда и только тогда, когда трехчлен обратится в нуль, т.е. только в том случае, когда будет корнем квадратного уравнения , которое называется характеристическим уравнением для дифференциаль-ного уравнения (1).
Для нахождения общего решения такого уравнения целесообразно действовать таким образом:
1) составить характеристическое уравнение путем замены на , на , на 1, т.
е. получить алгебраическое уравнениеотносительно k. (2)
2) решить алгебраическое уравнение, используя формулу:
. (3)
3) проанализировать возможные корни характеристического уравнения:
а) действительные и различные, т.е. ;
б) действительные и равные, т.е. ;
в) комплексные, т.е. , где .
4) в зависимости от значений корней характеристического уравнения общее решение заданного дифференциального уравнения (1) имеет вид:
в случае а): .
в случае б): .
в случае в): .
Пример 1.Найти общие решения уравнений:
а) ;
б) ;
в) .
Решение. Для уравнения а) характеристическим уравнением является .
Найдем корни этого уравнения: .
Корни характеристического уравнения действительны и различ-ны, поэтому общее решение уравнения а) будет: .
Для уравнения б) характеристическим уравнением является
.
Корни характеристического уравнения действительны и равны, поэтому общее решение уравнения б): .
Для уравнения в) характеристическим уравнением является
.
Корни этого уравнения комплексные числа, причем , , поэтому общим решением дифференциального уравнения в) является: .
Пример использования дифференциальных уравнений в экономических задачах
Пример 1. Экономисты установили, что скорость увеличения инвестированного капитала в любой момент времени пропорциональна величине капитала с коэффициентом пропорциональности равным согласованному проценту непрерывного возрастания капитала. Необходимо найти закон возрастания инвестированного капитала, учитывая величину начальной инвестиции .
Решение. Пусть – величина инвестированного капитала в момент времени (искомая функция).
Тогда – скорость изменения инвестиции, . По условию задачи имеем
.
Необходимо решить задачу Коши для дифференциального уравнения первого порядка.
Общим решением дифференциального уравнения является функция . Учитывая начальное условие , имеем . Решением задачи Коши является функция .
Упражнения к главе 5
1.Найти общее решение или общий интеграл дифферен-циальных уравнений с разделяющимися переменными:
1) ; 2) ;
3) ; 4) ;
5) ; 6) ;
7) .
2. Найти общее решение линейных дифференциальных уравнений первого порядка:
1) ; 2) ;
3) ; 4) ;
5) ; 6) ;
7) .
3. Найти общее решение однородных дифференциальных уравнений первого порядка:
1) ; 2) ; 3) ;
4) ; 5) ; 6) ;
7) .
4. Найти общее решение уравнений Бернулли:
1) ; 2) ;
3) ; 4) ;
5) .
5. Найти решение задачи Коши:
1) ; 2) ;
3) ; 4) ;
5) .
6.Найти общее решение дифференциальных уравнений второго порядка:
1) ; 2) ;
3) ; 4) ;
5) .
7. Найти общее решение уравнений:
1) ; 2) ;
3) ; 4) ;
5) ; 6) .
8. Решить задачу экономического содержания:
Скорость возрастания численности населения пропорциональна численности населения. Найти закон роста численности населения страны, в которой в 2000 году было 50 млн. населения. Сколько населения будет в 2010 году?
5.9 Задания для индивидуальной семестровой работы студентов к главе 5
1.Найти общее решение однородного дифференциального уравнения 1-го порядка
1) . 2) .
3) . 4) .
5) . 6) .
7) . 8) .
9) . 10) .
11) . 12) .
13) . 14) .
15) . 16) .
17) . 18) .
19) . 20) .
21) . 22) .
23) . 24) .
25) .
26) .27) . 28) .
29) . 30) .
2Найти общее решение линейного дифференциального уравнения и уравнения Бернулли
1) . 2) .
3) . 4) .
5) . 6) .
7) . 8) .
9) . 10) .
11) . 12) .
13) . 14) .
15) . 16) .
17) . 18) .
19) . 20) .
21) . 22) .
23) . 24) .
25) . 26) .
27) . 28) .
29) . 30) .
ЛИТЕРАТУРА
1. Барковський В.В., Барковська Н.В. Вища математика для економістів. – Київ: ЦУЛ, 2002. – 400с.
2. Бугір М.К. Математика для економістів: Посібник. – К.: Видавничий центр “Академія” , 2003. – 520 с.
3. Зимина О.В., Кириллов А.И., Сальникова Т.А. Высшая математика. (Решебник). – 2-е изд., испр. – М.: Физико-математическая литература, 2001. – 368 с.
4. Каплан И.А. Практические занятия по высшей математике. – Харьков: Изд-во Харьк. ун-та, 1968.
– 411 с.5. Красс М.С., Чупрынов Б.П. Основы математики и ее приложения в экономическом образовании: Учеб. – 2-е изд., испр. – М.: Дело, 2001. – 688 с.
6. Красс М.С., Чупрынов Б.П. Математика для экономистов. – СПб.: Питер, 2006. – 464 с.: ил. –(Серия «Учебное пособие»).
7. И.Н. Ляшенко, Е.И. Ляшенко. Математика для экономистов: Учебное пособие для подготовки бакалавров экономического профиля. – 1998. – 228 с.
8. Павленко Т.В., Сукач Т. М. Вивчення інтегрального числення в умовах модульно-рейтингової системи навчання: Навч.посіб. – Алчевськ: ДонДТУ, 2005 – 166 с.
9. Письменный Д.Т. Конспект лекций по высшей математике. 1 часть. — 2-е изд., испр. – М.: Айрис-пресс, 2003. — 288 с.
10. Пискунов Н.С. Дифференциальное исчисление. Т. 1, 2. – М.: Наука, 1985. – 430, 451 с.
11. Ризун В.И. Высшая математика для экономических специальностей, часть II. – Алчевск, ДГМИ, 1999. – 287 с.
12. Ризун В.И. Высшая математика для экономических специальностей.
– Алчевск, ДГМИ, 2001. – 214 с.13. Сукач Т. Н. Линейная алгебра и аналитическая геометрия в примерах и задачах: Учебное пособие для студентов вуза, колледжа. – Алчевск: ДГМИ, 2003 – 121 с.
14. Токунова Т.В. Диференціальне і інтегральне числення: Навч. посіб. – Алчевськ: ДГМІ, 2002. – 175 с.
3. Однородные дифференциальные уравнения первого порядка
Понятие однородного дифференциального уравнения первого порядка связано с однородными функциями.
Определение 1.Функция f(X,y) называется однородной функцией n-ого измерения (n-ой степени) относительно переменных X и y,если при любом t справедливо тождество
.
(3.
1)Например, функция — однородная функция первого измерения, так как
;
— однородная функция третьего измерения , так как
;
— однородная функция нулевого измерения, так как
, т.е..
Определение 2.Дифференциальное уравнение первого порядкаy‘ = f(x,y) называется однородным, если функцияf(x,y) есть однородная функция нулевого измерения относительноx иy, или, как говорят,f(x,y) – однородная функция степени нуль.
Его можно представить в виде
P (x, y) dx + Q (x, y) dy = 0,
(3.
2)где P(x,y) иQ(x,y) – однородные функции одинакового измерения: отношение двух однородных функций одного и того же измерения является однородной функцией нулевого измерения (см. третий из приведенных выше примеров).
Возможна следующая форма записи уравнения (3.2):
,
(3.3)
что позволяет определить однородное уравнение как такое дифференциальное, которое можно преобразовать к виду (3.3).
Замена приводит однородное уравнение к уравнению с разделяющимися переменными. Действительно, после подстановкиу = xzполучим,Разделяя переменные и интегрируя, найдем:
,
Пример 1.Решить уравнение .
Полагаем у = zx, Подставляем эти выраженияy иdyв данное уравнение:илиРазделяем переменные:и интегрируем:,
Заменяя zна, получим.
Пример 2. Найти общее решение уравнения.
В данном уравнении P (x,y) =x2-2y2,Q(x,y) =2xy– однородные функции второго измерения, следовательно, данное уравнение является однородным. Его можно представить в видеи решать так же, как и представленное выше. Но используем другую форму записи. Положимy = zx, откудаdy = zdx + xdz. Подставляя эти выражения в исходное уравнение, будем иметь
,
то есть
или
dx+2zxdz = 0.
Разделяем переменные, считая
.
Интегрируем почленно это уравнение
, откуда
то есть . Возвращаясь к прежней функциинаходим общее решение
Пример 3. Найти общее решение уравнения.
Цепочка преобразований: ,y = zx,, , , , , , , , , .
Лекция 8.
4. Линейные дифференциальные уравнения первого порядка Линейное дифференциальное уравнение первого порядка имеет вид
,
(4.1)
где ,,c(x) – непрерывные функции.
Если, то уравнение (4.1) можно записать в приведённом виде
(4.
1a)Здесь – свободный член, называемый также правой частью уравнения. В этом виде будем рассматривать линейное уравнение в дальнейшем.
Если 0, то уравнение (4.1а) называется линейным неоднородным. Если же0, то уравнение принимает вид
(4.2)
и называется линейным однородным.
Название уравнения (4.1а) объясняется тем, что неизвестная функция y и её производнаявходят в него линейно, т.е. в первой степени.
В линейном однородном уравнении переменные разделяются. Переписав его в виде откудаи интегрируя, получаем:,т.е.
(4.
3)При делении на теряем решение. Однако оно может быть включено в найденное семейство решений (4.3), если считать, чтоСможет принимать и значение 0.
Существует несколько методов решения уравнения (4.1а). Согласно методу Бернулли, решение ищется в виде произведения двух функций отх:
(4.4)
Одна из этих функций может быть выбрана произвольно, так как лишь произведение uv должно удовлетворять исходному уравнению, другая определяется на основании уравнения (4.1а).
Дифференцируя обе части равенства (4.4), находим .
Подставляя полученное выражение производной , а также значениеу в уравнение (4.1а), получаем, или
.
(4.5)
Так как одну из неизвестных функций можем выбрать произвольно, выберем функцию u так, чтобы
,
(4.6)
т.е. в качестве функции vвозьмём решение однородного линейного уравнения (4.6):
.
(4.3а)
Ввиду произвольности в выборе v,мы можем не учитывать произвольную постояннуюС (точнее – можем приравнять её нулю). Подставляя найденное значениеv(x) в уравнение (4.5), получим, учитывая (4.6):
,
(4.
7)откуда
(4.8)
(Здесь Cписать обязательно, иначе получится не общее, а частное решение).
Таким образом, видим, что в результате используемой подстановки (4.4) уравнение (4.1а) сводится к двум уравнениям с разделяющимися переменными (4.6) и (4.7).
Подставляя иv(x) в формулу (4.4), окончательно получаем
,
или
.
(4.9)
Пример 1.Найти общее решение уравнения
Положим , тогда. Подставляя выраженияив исходное уравнение, получимили(*)
Приравняем нулю коэффициент при :
Разделяя переменные в полученном уравнении, имеем (произвольную постояннуюC не пишем), отсюдаv=x.
Найденное значениеvподставляем в уравнение (*):,,.
Следовательно, общее решение исходного уравнения.
Отметим, что уравнение (*) можно было записать в эквивалентном виде:
.
Произвольно выбирая функцию u, а неv, мы могли полагать. Этот путь решения отличается от рассмотренного только заменойvнаu(и, следовательно,uнаv), так что окончательное значениеуоказывается тем же самым.
На основании изложенного выше получаем алгоритм решения линейного дифференциального уравнения первого порядка.
Приводим рассматриваемое уравнение к виду.
Используя подстановку, находими подставляем эти выражения в уравнение.
Группируем члены уравнения, выносим одну из функций uилиvза скобки.
Находим
вторую функцию, приравняв выражение в
скобках нулю и решив полученное
уравнение.Подставляем найденную функцию в оставшееся выражение и находим вторую функцию.
Записываем общее решение, подставив выражения для найденных функций u иvв равенство.
Если требуется найти частное решение, то определяем Сиз начальных условий и подставляем в общее решение.
Отметим далее, что иногда уравнение первого порядка становится линейным, если усчитать независимой переменной, аx– зависимой, т.е. поменять ролиx иy. Это можно сделать при условии, чтоxиdxвходят в уравнение линейно.
Пример 2. Решить уравнение .
Однако если рассматривать xкак функцию оту, то, учитывая, что,его можно привести к виду
(4.
1 б)Заменив на,получимили. Разделив обе части последнего уравнения на произведениеydy, приведем его к виду
, или. (**)
Здесь P(y)=,. Это линейное уравнение относительноx. Полагаем,. Подставляя эти выражения в (**), получаем
или.
Выберем vтак, чтобы,, откуда;. Далее имеем,,.
Т.к. , то приходим к общему решению данного уравнения в виде
.
Отметим, что в уравнение (4.1а) P(x) иQ (x) могут входить не только в виде функций от x, но и констант:P=a,Q=b. Линейное уравнение
(4.
10)можно решать и с помощью подстановки y=uv и разделением переменных:
;.
Отсюда ;;; где. Освобождаясь от логарифма, получаем общее решение уравнения
(здесь).
При b=0 приходим к решению уравнения
(4.10а)
в виде
(4.11)
(см. уравнение показательного роста (2.4) при ).
Применим далее для интегрирования неоднородного линейного уравнения (4.1а) метод вариации произвольной постоянной (метод Лагранжа).
Сначала интегрируем соответствующее однородное уравнение (4.2). Как указано выше, его решение имеет вид (4.3). Будем считать сомножитель Св (4.3) функцией отх, т.е. по существу делаем замену переменной
,
(4.3а)
где C(x)-новая неизвестная функцияx. Подставляя производнуюв исходное неоднородное уравнение (4.1а), получим:, или
,
(4.12)
откуда, интегрируя, находим
dx+C1,
(4.13)
где С1-постоянная. Следовательно,
.
(4.14)
Отметим, что согласно (4.14) (см. также (4.9)), общее решение неоднородного линейного уравнения равно сумме общего решения соответствующего однородного уравнения (4.3) и частного решения неоднородного уравнения, определяемого вторым слагаемым, входящим в (4.14) (и в (4.9)).
При решении конкретных уравнений следует повторять приведённые выше выкладки, а не использовать громоздкую формулу (4.14).
Применим метод Лагранжа к уравнению, рассмотренному в примере 1:
.
Интегрируем соответствующее однородное уравнение .
Разделяя переменные, получаем и далее. Решение выражения формулойy = Cx. Решение исходного уравнения ищем в видеy = C(x)x. Подставив это выражение в заданное уравнение, получим;;,. Общее решение исходного уравнения имеет вид
.
В заключение отметим, что к линейному уравнению приводится уравнение Бернулли
, ()
(4.15)
которое можно записать в виде
.
(4.15а)
Заменой оно приводится к линейному уравнению:
,,.
Уравнения Бернулли также решаются изложенными выше методами.
Пример 3. Найти общее решения уравнения.
Цепочка преобразований: ,,,,,,,,,,,,,,
Модуль №4
Рекомендации
к самопроверке изученного материала
После изучения определенной темы по учебнику и решения достаточного количества соответствующих задач студенту рекомендуется воспроизвести по памяти определения, выводы формул, формулировки и доказательства теорем, проверяя себя каждый раз по учебнику.
В случае необходимости надо еще раз внимательно разобраться в материале учебника и решить задачи. Иногда недостаточность усвоения того или иного вопроса выясняется только при изучении дельнейшего материала. В этом случае надо вернуться назад и повторить плохо усвоенный раздел.
Важным критерием усвоения теории является умение решать задачи на пройденный материал. Однако здесь следует предостеречь студента от весьма распространенной ошибки, заключающейся в том, что благополучное решение задач воспринимается им как признак усвоения теории. Иногда правильное решение задачи получается в результате применения механически заученных формул без понимания сущности теоретических положений.
4.1. Понятие о дифференциальном уравнении
4.1.2. Дифференциальные уравнения первого порядка
4.1.3. Уравнения первого порядка с разделяющимися переменными
4.1.4. Однородные дифференциальные уравнения первого порядка
4.1.5. Линейные дифференциальные уравнения первого порядка
Практическое занятие №1
4.2. Дифференциальные уравнения второго порядка
4.2.1. Простые случаи уравнений второго порядка
4.2.2. Случаи понижения порядка
4.2.3. Линейные однородные уравнения второго порядка с постоянными коэффициентами
Практическое занятие №2
Примеры приложений к задачам экономики
· Какое уравнение называется дифференциальным? Что называется порядком дифференциального уравнения? Приведите примеры.
· Какое решение дифференциального уравнения называется общим и какое — частным? Каков их геометрический смысл? Приведите примеры.
· Каков геометрический смысл начальных условий дифференциального уравнения первого порядка? Как из общего решения дифференциального уравнения первого порядка можно получить его частное решение, удовлетворяющее заданным начальным условиям? Приведите примеры.
· Каков геометрический смысл начальных условий для дифференциального уравнения второго порядка?
· Какое дифференциальное уравнение второго порядка называется линейным? В каких случаях оно называется однородным и неоднородным?
· Каковы свойства решений линейных однородных дифференциальных уравнений второго порядка? Какова структура его общего решения?
Внимание ! Правильно выбери свой вариант, например, если Ваш № зачетной книжки заканчивается цифрами ….51, то Ваш вариат 21.
Линейные дифференциальные уравнения первого порядка
Определение линейного уравнения первого порядка
Дифференциальное уравнение типа
\ [y ’+ a \ left (x \ right) y = f \ left (x \ right), \]
, где \ (a \ left (x \ right) \) и \ (f \ left (x \ right) \) — непрерывные функции от \ (x, \), называется линейным неоднородным дифференциальным уравнением первого порядка. Мы рассматриваем два метода решения линейных дифференциальных уравнений первого порядка:
- Использование интегрирующего коэффициента;
- Метод изменения постоянной.
Использование интегрирующего коэффициента
Если линейное дифференциальное уравнение записано в стандартной форме:
\ [y ’+ a \ left (x \ right) y = f \ left (x \ right), \]
интегрирующий коэффициент определяется по формуле
\ [{u \ left (x \ right)} = {\ exp \ left ({\ int {a \ left (x \ right) dx}} \ right).} \]
Умножение левой части уравнения на интегрирующий множитель \ (u \ left (x \ right) \) преобразует левую часть в производную произведения \ (y \ left (x \ right) u \ left (x \ верно).\)
Общее решение дифференциального уравнения выражается следующим образом:
\ [y = \ frac {{\ int {u \ left (x \ right) f \ left (x \ right) dx} + C}} {{u \ left (x \ right)}}, \]
где \ (C \) — произвольная постоянная.
Метод изменения константы
Этот метод аналогичен предыдущему. Для начала необходимо найти общее решение однородного уравнения:
\ [y ’+ a \ left (x \ right) y = 0. \]
Общее решение однородного уравнения содержит постоянную интегрирования \ (C.\) Заменим константу \ (C \) некоторой (пока неизвестной) функцией \ (C \ left (x \ right). \) Подставляя это решение в неоднородное дифференциальное уравнение, мы можем определить функцию \ (C \ влево (х \ вправо). \)
Описанный алгоритм называется методом изменения константы. Конечно, оба метода приводят к одному и тому же решению.
Задача начального значения
Если помимо дифференциального уравнения существует еще начальное условие в виде \ (y \ left ({{x_0}} \ right) = {y_0}, \), такая задача называется задачей начальной стоимости (IVP). или проблема Коши.3}. \)
Решение.
Мы решим эту задачу, используя метод изменения постоянной. Сначала находим общее решение однородного уравнения:
\ [xy ’= y, \]
, которую можно решить, разделив переменные:
\ [
{x \ frac {{dy}} {{dx}} = y, \; \;} \ Rightarrow
{\ frac {{dy}} {y} = \ frac {{dx}} {x }, \; \;} \ Rightarrow
{\ int {\ frac {{dy}} {y}} = \ int {\ frac {{dx}} {x}}, \; \;} \ Rightarrow
{ \ ln \ left | у \ право | = \ ln \ left | х \ право | + \ ln C, \; \;} \ Rightarrow
{y = Cx.3} + {C_1} x.} \]Однородные дифференциальные уравнения
Здесь мы рассмотрим специальный метод решения «Однородных дифференциальных уравнений»
Однородные дифференциальные уравнения
Дифференциальное уравнение первого порядка — это Однородное , когда оно может иметь следующую форму:
dy dx = F ( y x )
Мы можем решить эту проблему, используя разделение переменных, но сначала мы создаем новую переменную v = y x
v = y x , что также равно y = vx
И dy dx = d (vx) dx = v dx dx + x dv dx (в соответствии с Правилом продукта)Что можно упростить до dy dx = v + x dv dx
Используя y = vx и dy dx = v + x dv dx , мы можем решить дифференциальное уравнение.
Пример покажет, как это все делается:
Пример: Решить
dy dx = x 2 + y 2 xyМожно ли сделать это в стиле F ( y x )?
Начать с: x 2 + y 2 xy
Отдельные термины: x 2 xy + y 2 xy
Упростить: x y + y x
Величина, обратная первому члену 🙁 y x ) -1 + y x
Да, у нас есть функция y x .
Итак, вперед:
Начать с: dy dx = ( y x ) -1 + y x
y = vx и dy dx = v + x dv dx : v + x dv dx = v -1 + v
Вычтите v с обеих сторон: x dv dx = v -1
Теперь используйте разделение переменных:
Разделите переменные: v dv = 1 x dx
Поставьте знак интеграла впереди: ∫v dv = ∫ 1 x dx
Интегрировать: v 2 2 = ln (x) + C
Затем делаем C = ln (k) : v 2 2 = ln (x) + ln (k)
Линия комбайна: v 2 2 = ln (kx)
Упростить: v = ± √ (2 ln (kx))
Теперь подставляем обратно v = y x
Заменитель v = y x : y x = ± √ (2 ln (kx))
Упростить: y = ± x √ (2 ln (kx))
И у нас есть решение.
Положительная часть выглядит так:
Другой пример:
Пример: Решить
dy dx = y (x − y) x 2Можно ли сделать это в стиле F ( y x )?
Начать с: y (x − y) x 2
Отдельные термины: xy x 2 — y 2 x 2
Упростить: y x — ( y x ) 2
Да! Итак, поехали:
Начать с: dy dx = y x — ( y x ) 2
y = vx и dy dx = v + x dv dx v + x dv dx = v — v 2 = v — v 2
Вычтите v с обеих сторон: x dv dx = −v 2
Теперь используйте разделение переменных:
Разделите переменные: — 1 v 2 dv = 1 x dx
Поставьте знак интеграла впереди: ∫− 1 v 2 dv = ∫ 1 x dx
Интегрировать: 1 v = ln (x) + C
Затем делаем C = ln (k) : 1 v = ln (x) + ln (k)
Линия комбайна: 1 v = ln (kx)
Упростить: v = 1 ln (kx)
Теперь подставляем обратно v = y x
Заменитель v = y x : y x = 1 ln (kx)
Упростить: y = x ln (kx)
И у нас есть решение.
Вот несколько примеров значений k:
И последний пример:
Пример: Решить
dy dx = x − y x + yМожно ли сделать это в стиле F ( y x )?
Начать с: x − y x + y
Разделить на x: x / x − y / x x / x + y / x
Упростить: 1 − y / x 1 + y / x
Да! Итак, поехали:
Начать с: dy dx = 1 − y / x 1 + y / x
y = vx и dy dx = v + x dv dx v + x dv dx = 9 + v 1 9 + v
Вычтите v с обеих сторон: x dv dx = 1 − v 1 + v — v
Затем: x dv dx = 1 − v 1 + v — v + v 2 1 + v
Упростить: x dv dx = 1−2v − v 2 1 + v
Теперь используйте разделение переменных:
Разделите переменные: 1 + v 1−2v − v 2 dv = 1 x dx
Поставьте знак интеграла впереди: ∫ 1 + v 1−2v − v 2 dv = ∫ 1 x dx
Интегрировать: — 1 2 ln (1−2v − v 2 ) = ln (x) + C
Тогда получаем C = ln (k) : — 1 2 ln (1−2v − v 2 ) = ln (x) + ln (k)
Линия комбайна: (1−2v − v 2 ) -½ = kx
Квадратное и обратное: 1−2v − v 2 = 1 k 2 x 2
Теперь подставляем обратно v = y x
Заменитель v = y x : 1-2 ( y x ) — ( y x ) 2 = 1 k 2 x 9
Умножить на x 2 : x 2 −2xy − y 2 = 1 k 2
Мы почти у цели… хотя приятно выделить y!
Мы можем попытаться разложить на множители x 2 −2xy − y 2 , но сначала мы должны немного изменить порядок:Изменить знаки: y 2 + 2xy − x 2 = — 1 k 2
Заменить — 1 k 2 на c: y 2 + 2xy − x 2 = c
Добавьте 2x 2 к обеим сторонам: y 2 + 2xy + x 2 = 2x 2 + c
Фактор: (y + x) 2 = 2x 2 + c
Квадратный корень: y + x = ± √ (2x 2 + c)
Вычтем x из обеих частей: y = ± √ (2x 2 + c) — x
И у нас есть решение.
Положительная часть выглядит так:
Решение линейных дифференциальных уравнений первого порядка
Возможно, вам сначала захочется прочитать о дифференциальных уравнениях и разделении переменных!
Дифференциальное уравнение — это уравнение с функцией и одной или несколькими производными:
Пример: уравнение с функцией y и ее производная dy dxЗдесь мы рассмотрим решение специального класса дифференциальных уравнений под названием Линейные дифференциальные уравнения первого порядка
Первый орден
Они «Первого Ордена», когда есть только dy dx , а не д 2 д dx 2 или д 3 д dx 3 и т. Д.
линейный
Дифференциальное уравнение первого порядка является линейным , когда его можно сделать так:
dy dx + Р (х) у = Q (х)
Где P (x) и Q (x) — функции от x.
Для ее решения есть специальный метод:
- Мы изобретаем две новые функции от x, называем их u и v и говорим, что y = uv .
- Затем мы решаем, чтобы найти u , а затем находим v , приводим в порядок, и все готово!
И мы также используем производную y = uv (см. Производные правила (правило продукта)):
dy dx = u дв dx + v du dx
Ступеньки
Вот пошаговый метод их решения:
Давайте посмотрим на примере, чтобы увидеть:
Пример 1: Решите это:
dy dx — y х = 1
Во-первых, это линейно? Да, так как это в форме
dy dx + P (x) y = Q (x)
, где P (x) = — 1 х и Q (x) = 1Итак, давайте выполним шаги:
Шаг 1: Подставляем y = uv и dy dx = u дв dx + v du dx
Так это: dy dx — y х = 1
Становится этим: u дв dx + v du dx — УФ х = 1
Шаг 2: Факторизуйте детали, включающие v
Фактор v : u дв dx + v ( du dx — u х ) = 1
Шаг 3. Положите член v равным нулю
v член равен нулю: du dx — u х = 0
Итак: du dx знак равно u х
Шаг 4: Решите, используя разделение переменных, чтобы найти u
Отдельные переменные: du u знак равно dx х
Поставьте знак интеграла: ∫ du u = ∫ dx х
Интегрировать: ln (u) = ln (x) + C
Сделайте C = ln (k): ln (u) = ln (x) + ln (k)
Итак: u = kx
Шаг 5: подставьте u обратно в уравнение на шаге 2
(помните, что термин v равен 0, поэтому его можно игнорировать): kx дв dx = 1
Шаг 6: Решите это, чтобы найти v
Отдельные переменные: k dv = dx х
Поставить знак интеграла: ∫ k дв. = ∫ dx х
Интегрировать: kv = ln (x) + C
Сделайте C = ln (c): kv = ln (x) + ln (c)
А так: kv = ln (cx)
И так: v = 1 к ln (сх)
Шаг 7: Подставляем в y = uv , чтобы найти решение исходного уравнения.
y = uv: y = kx 1 к ln (сх)
Упростить: y = x ln (cx)
И получается это прекрасное семейство кривых:
y = x ln (cx) для различных значений cЧто означают эти кривые? Они являются решением уравнения dy dx — y х = 1
Другими словами:
В любом месте на любой из этих кривых
наклон минус y х равно 1Давайте проверим несколько точек на c = 0.6 кривая:
Расчет по графику (до 1 знака после запятой):
Пункт х y Уклон ( dy dx ) dy dx — y х А 0,6 -0,6 0 0 — −0.6 0,6 = 0 + 1 = 1 Б 1,6 0 1 1 — 0 1,6 = 1 — 0 = 1 С 2,5 1 1,4 1,4 — 1 2,5 = 1,4 — 0,4 = 1 Почему бы не проверить несколько пунктов самостоятельно? Здесь вы можете построить кривую.
Может быть, вам поможет еще один пример? Может, посложнее?
Пример 2: Решите это:
dy dx — 3 года х = х
Во-первых, это линейно? Да, так как это в форме
dy dx + P (x) y = Q (x)
, где P (x) = — 3 х и Q (x) = xИтак, давайте выполним шаги:
Шаг 1: Подставляем y = uv и dy dx = u дв dx + v du dx
Так это: dy dx — 3 года х = х
Становится этим: u дв dx + v du dx — 3uv х = х
Шаг 2: Факторизуйте детали, включающие v
Фактор v : u дв dx + v ( du dx — 3u х ) = х
Шаг 3. Положите член v равным нулю
v член = ноль: du dx — 3u х = 0
Итак: du dx знак равно 3u х
Шаг 4: Решите, используя разделение переменных, чтобы найти u
Отдельные переменные: du u = 3 dx х
Поставьте знак интеграла: ∫ du u = 3 ∫ dx х
Интегрировать: ln (u) = 3 ln (x) + C
Сделайте C = −ln (k): ln (u) + ln (k) = 3ln (x)
Тогда: uk = x 3
Итак: u = х 3 к
Шаг 5: подставьте u обратно в уравнение на шаге 2
(помните, что термин v равен 0, поэтому его можно игнорировать) 🙁 х 3 к ) дв dx = х
Шаг 6: Решите это, чтобы найти v
Отдельные переменные: dv = k x −2 dx
Поставьте знак интеграла: ∫ dv = ∫ k x −2 dx
Интегрировать: v = −k x −1 + D
Шаг 7: Подставляем в y = uv , чтобы найти решение исходного уравнения.
у = УФ: у = х 3 к (−k x −1 + D)
Упростить: y = −x 2 + D к х 3
Заменить D / k одной константой c : y = c х 3 — х 2
И получается это прекрасное семейство кривых:
у = с x 3 — x 2 для различных значений cИ еще пример, на этот раз еще на сложнее :
Пример 3: Решите это:
dy dx + 2xy = −2x 3
Во-первых, это линейно? Да, так как это в форме
dy dx + P (x) y = Q (x)
, где P (x) = 2x и Q (x) = −2x 3Итак, давайте выполним шаги:
Шаг 1: Подставляем y = uv и dy dx = u дв dx + v du dx
Так это: dy dx + 2xy = −2x 3
Становится этим: u дв dx + v du dx + 2xuv = −2x 3
Шаг 2: Факторизуйте детали, включающие v
Фактор v : u дв dx + v ( du dx + 2xu ) = −2x 3
Шаг 3. Положите член v равным нулю
v член = ноль: du dx + 2xu = 0
Шаг 4: Решите, используя разделение переменных, чтобы найти u
Отдельные переменные: du u = −2x dx
Поставить знак интеграла: ∫ du u = −2 ∫ x dx
Интегрировать: ln (u) = −x 2 + C
Сделайте C = −ln (k): ln (u) + ln (k) = −x 2
Тогда: uk = e −x 2
Итак: u = e −x 2 к
Шаг 5: подставьте u обратно в уравнение на шаге 2
(помните, что термин v равен 0, поэтому его можно игнорировать) 🙁 e −x 2 к ) дв dx = −2x 3
Шаг 6: Решите это, чтобы найти v
Отдельные переменные: dv = −2k x 3 e x 2 dx
Поставьте знак интеграла: ∫ дв. = ∫ −2k x 3 e x 2 dx
Интегрировать: v = о нет! это трудно!
Посмотрим… мы можем интегрировать по частям … где написано:
∫ RS dx = R ∫ S dx — ∫ R ‘(∫ S dx) dx
(Боковое примечание: здесь мы используем R и S, использование u и v может сбивать с толку, поскольку они уже означают что-то другое.)
Выбор R и S очень важен, это лучший выбор, который мы нашли:
Итак, вперед:
Первый вытащить k: v = k ∫ −2x 3 e x 2 dx
R = −x 2 и S = 2x e x 2 : v = k ∫ (−x 2 ) (2xe x 2 ) dx
Теперь интегрировать по частям: v = kR ∫ S dx — k ∫ R ‘(∫ S dx) dx
Положить R = −x 2 и S = 2x e x 2
А также R ‘= −2x и ∫ S dx = e x 2
Итак, это становится: v = −kx 2 ∫ 2x e x 2 dx — k ∫ −2x (e x 2 ) dx
Теперь интегрируйте: v = −kx 2 e x 2 + k e x 2 + D
Упростить: v = ke x 2 (1 − x 2 ) + D
Шаг 7: Подставляем в y = uv , чтобы найти решение исходного уравнения.
у = УФ: у = e −x 2 к (ke x 2 (1 − x 2 ) + D)
Упростить: y = 1 — x 2 + ( D к ) д — x 2
Заменить D / k на одну константу c : y = 1 — x 2 + c э — x 2
И мы получаем красивое семейство кривых:
у = 1 — х 2 + c e — x 2 для различных значений cДифференциальные уравнения первого и второго порядка
Дифференциальные уравнения первого и второго порядкаДифференциальные уравнения первого порядка
Дифференциальное уравнение первого порядка имеет вид:
Линейные уравнения:
Общее общее решение дается формулой
где
называется интегрирующим коэффициентом .
Разделимые уравнения:
- (1)
- Решите уравнение g ( y ) = 0, которое дает константу решения.
- (2)
- Непостоянные решения даются формулами
Уравнения Бернулли:
- (1)
- Рассмотрим новую функцию.
- (2)
- Новое уравнение, которому удовлетворяет v , имеет вид
- (3)
- Решите новое линейное уравнение, чтобы найти v .
- (4)
- Возврат к старой функции y путем подстановки.
- (5)
- Если n > 1, добавьте решение y = 0 к уже полученным (4).
Однородные уравнения:
является однородным , если функция f ( x , y ) однородна, то есть
Путем подстановки мы рассматриваем новую функцию
Новое дифференциальное уравнение, которому удовлетворяет z , имеет вид
которое является сепарабельным уравнением.Решения постоянные f (1, z ) — z = 0 и непостоянные, заданные формулой
Не забудьте вернуться к старой функции y = xz .
Точные уравнения:
будет точным , если
Условие точности гарантирует существование функции F ( x , y ) такой, что
Все решения даются неявным уравнением
Дифференциальные уравнения второго порядка
Однородные линейные уравнения с постоянными коэффициентами:
Запишите характеристическое уравнение
- (1)
- Если и — различные действительные числа (это случается если), то общее решение
- (2)
- Если (что произойдет, если), то общее решение
- (3)
- Если и — комплексные числа (что происходит, если
), то общее решение
где
это
Неоднородные линейные уравнения:
Общее решение дается формулой
где — частное решение, а — общее решение связанного однородного уравнения
Для поиска были разработаны два основных метода.
Метод неопределенных коэффициентов или метод угадывания
Этот метод работает для уравнениягде a , b и c постоянны и
где — полиномиальная функция степени n . В этом случае мы имеем
где
Константы и должны быть определены. Сила s равно 0, если не является корнем характеристическое уравнение.Если это простой корень, то с = 1 и с = 2, если это двойной корень.
Замечание. Если неоднородный член г ( x ) удовлетворяет следующимгде есть формы, указанные выше, то мы разбиваем исходное уравнение в уравнения N
затем найдите конкретное решение. Конкретное решение исходное уравнение дается
Метод изменения параметров
Этот метод работает до тех пор, пока мы знаем два линейно независимых решения однородного уравненияОбратите внимание, что этот метод работает независимо от того, являются ли коэффициенты постоянный или нет.конкретный решение как
где и — функции. Отсюда и название метода.
Функции и решения системы:что подразумевает
Следовательно, мы имеем
Уравнения Эйлера-Коши:
где b и c — постоянные числа. Путем подстановки установить
то новое уравнение, которому удовлетворяет y ( t ),
которое является дифференциальным уравнением второго порядка с постоянной коэффициенты.
- (1)
- Запишите характеристическое уравнение
- (2)
- Если корни и являются различными действительными числами, то общее решение дается формулой
- (2)
- Если корни и равны (), то общее решение
- (3)
- Если корни и являются комплексными числами, то
общее решение
где и.
Вам нужна дополнительная помощь? Пожалуйста, разместите свой вопрос на нашем S.O.S. Математика CyberBoard.
Авторские права 1999-2021 MathMedics, LLC. Все права защищены.
Свяжитесь с нами
Math Medics, LLC. — П.О. Box 12395 — El Paso TX 79913 — США
пользователей онлайн за последний часЧто нужно знать для изучения математического анализа
Дифференциальные уравнения первого порядка — это уравнения, содержащие неизвестную функцию и ее первую производную.Основная цель этой обзорной статьи Calculus III — обсудить свойства решений дифференциальных уравнений первого порядка и описать некоторые эффективные методы нахождения решений.
Стандартная форма
Стандартная форма дифференциального уравнения первого порядка для неизвестной функции y (t): dfrac {dy} {dt} = f (t, y)
Здесь f — некоторая функция двух переменных. Многие, но не все, дифференциальные уравнения первого порядка могут быть записаны в стандартной форме, алгебраически решая для dfrac {dy} {dt} и затем устанавливая f (t, y) равным правой части полученного уравнения.
Любая дифференцируемая функция y = y (t), удовлетворяющая этому уравнению для всех t в некотором интервале, называется решением. Некоторые дифференциальные уравнения не имеют решений, тогда как другие дифференциальные уравнения имеют бесконечно много решений. Также возможно, что дифференциальное уравнение имеет ровно одно решение. Общее решение дифференциального уравнения — это совокупность всех решений. Дифференциальное уравнение вместе с дополнительным условием y (t_0) = y_0, заданным при некотором значении независимой переменной t = t_0, составляет проблему начального значения.Решением задачи начального значения является функция y (t), которая одновременно решает дифференциальное уравнение и удовлетворяет заданному дополнительному условию y (t_0) = y_0.
Уравнения с разделяемыми переменными
Не существует универсальной процедуры для решения дифференциальных уравнений первого порядка в стандартной форме с произвольным f (t, y). Здесь мы рассматриваем подмножество уравнений первого порядка, которые можно напрямую интегрировать.
Это возможно, если функция
ф (т, у)
можно представить в виде
f (t, y) = g (t) h (y)
Здесь g является функцией только t, а h является функцией только y.Дифференциальное уравнение
dfrac {dy} {dt} = g (t) h (y)
считается отделимым. Мы можем записать его в дифференциальной форме
dfrac {dy} {h (y)} — g (t) dt = 0
Общее решение этого уравнения дается следующим интегралом:
int dfrac {dy} {h (y)} — int g (t) dt = C
Здесь C представляет произвольную постоянную интегрирования. Интегралы, полученные в этом выражении, могут оказаться невозможными. В таком случае можно использовать численные методы для получения приближенного решения.2 = грех t + 1
Однородные уравнения
Дифференциальное уравнение в стандартной форме
dfrac {dy} {dt} = f (t, y)
однородно, если
f (альфа t, альфа y) = f (t, y)
для любого действительного числа альфа.
Такое уравнение всегда можно преобразовать в разделимое уравнение заменой независимой переменной
у = т, г
вместе с соответствующей производной:
dfrac {dy} {dt} = t, dfrac {dz} {dt} + z
Полученное уравнение с переменными z и t
может быть решено как разделимое дифференциальное уравнение, поскольку функция f
после такой замены оказывается функцией с единственной переменной z.
Проиллюстрируем этот метод на примерах.
Пример 1
Рассмотрим уравнение:
dfrac {dy} {dt} = dfrac {y + t} {t}
Сначала проверяем условие однородности:
f (альфа t, альфа y) = dfrac {alpha y + alpha t} {alpha t} = dfrac {y + t} {t} = f (t, y)
Во-вторых, мы вводим новую зависимую переменную
.z, так что z = y / t:
dfrac {dy} {dt} = t, dfrac {dz} {dt} + z = z + 1
Уравнение
т, dfrac {dz} {dt} = 1
— дифференциальное уравнение первого порядка с разделяемыми переменными, которое можно напрямую интегрировать:
z = ln | Kt |
Здесь мы установили постоянную интегрирования
C = -, ln | K | ,
и отметили, что
ln | t | + ln | K | = ln | Kt | .2
Линейные уравнения с переменными коэффициентами
Рассмотрим дифференциальное уравнение первого порядка в стандартной форме:
dfrac {dy} {dt} = f (t, y).
Дифференциальное уравнение линейно, если f (t, y)
можно записать как функцию t умножить на y,
плюс еще одна функция
т: f (t, y) = -, p (t) y + q (t).
Следовательно, линейное дифференциальное уравнение всегда можно выразить как:
dfrac {dy} {dt} + p (t) y = q (t)
Здесь p и q
даны функции независимой переменной t.
Линейные дифференциальные уравнения первого порядка не могут быть решены прямыми методами интегрирования, поскольку переменные не разделимы. В результате нам необходимо использовать другой метод решения. Первый шаг — умножить линейное дифференциальное уравнение на неопределенную функцию mu (t):
.mu (t), dfrac {dy} {dt} + mu (t) p (t) y = mu (t) q (t)
Теперь вопрос состоит в том, можем ли мы выбрать mu (t) так, чтобы левая часть этого уравнения распознавалась как производная некоторого конкретного выражения.Отметим следующие равенства:
dfrac {d} {dt} [mu (t) y] = mu (t) dfrac {dy} {dt} + dfrac {dmu (t)} {dt}, y = mu (t), dfrac {dy} {dt} + mu (t) p (t) y
Здесь второе равенство верно при условии, что mu (t) удовлетворяет уравнению:
dfrac {dmu (t)} {dt} = p (t) mu (t)
Это дифференциальное уравнение первого порядка с разделяемыми переменными, которые можно напрямую интегрировать:
int dfrac {dmu} {mu} — int p (t) dt = 0
Если временно предположить, что mu (t) положительно, то получим:
lnmu (t) = int p (t) dt + К
Выбирая произвольную константу K равной нулю, мы получаем простейшую возможную функцию для mu. А именно:
mu (t) = expleft (int p (t) dtright)
Обратите внимание, что интегрирующий коэффициент mu (t)
положительно для всех t,
, как мы и предполагали. Возвращаясь к линейному дифференциальному уравнению, имеем:
dfrac {d} {dt} [mu (t) y] = mu (t) q (t)
Следовательно, общее решение:
y = dfrac {int mu (s) q (s) ds + C} {mu (t)}
Обратите внимание, что для нахождения решения линейного дифференциального уравнения требуются два интегрирования: одно для получения интегрирующего множителя mu (t), а другое — для получения y.5}}
Точные уравнения и интегрирующие множители
Рассмотрим следующее дифференциальное уравнение первого порядка:
м (t, y) + n (t, y), dfrac {dy} {dt} = 0
Мы предполагаем, что он не является ни линейным, ни разделимым, поэтому методы, подходящие для этих типов уравнений, здесь не применимы. Но предположим, что мы можем идентифицировать функцию Psi (t, y) такую, что:
dfrac {частичный Psi} {частичный t} = m (t, y) ,, qquad dfrac {частичный Psi} {частичный y} = n (t, y)
Тогда дифференциальное уравнение принимает вид:
m (t, y) + n (t, y), dfrac {dy} {dt} = dfrac {частичный Psi} {частичный t} + dfrac {частичный Psi} {частичный y}, dfrac {dy} {dt} = dfrac {d} {dt}, Psi [t, y (t)] = 0
Такое дифференциальное уравнение называется точным уравнением.Решение точного уравнения дается неявно
фунтов на квадратный дюйм (t, y) = C,
где, как обычно, C
представляет собой произвольную константу.
Систематический способ определения точности данного дифференциального уравнения обеспечивается с помощью следующего теста. Если m (t, y) и n (t, y) — непрерывные функции, то дифференциальное уравнение первого порядка вида:
м (t, y) + n (t, y), dfrac {dy} {dt} = 0
является точным тогда и только тогда, когда:
dfrac {partial m (t, y)} {partial y} = dfrac {partial n (t, y)} {partial t}
В некоторых случаях неточное дифференциальное уравнение можно преобразовать в точное уравнение.Такое преобразование возможно, если мы умножим уравнение на подходящий интегрирующий коэффициент. Чтобы исследовать возможность реализации этой идеи в более общем плане, давайте умножим уравнение на функцию mu, а затем попытаемся выбрать mu так, чтобы полученное уравнение:
mu (t, y) m (t, y) + mu (t, y) n (t, y), dfrac {dy} {dt} = 0
проходит проверку на точность:
dfrac {частичный} {частичный y} [мкм] = dfrac {частичный} {частичный t} [mu n]
Хотя в принципе интегрирующие множители являются мощным инструментом для решения дифференциальных уравнений, на практике их можно найти только в особых случаях.Наиболее важная ситуация, в которой можно найти интегрирующие факторы, возникает, когда mu является функцией только одной из переменных t или y, а не обеих. Предполагая, что mu является функцией только t, мы имеем:
dfrac {dmu} {dt} = g mu ,, qquad g = dfrac {1} {n} left (dfrac {partial m} {partial y} — dfrac {partial n} {partial t} right)
Если g является функцией только t, то интегрирующий коэффициент mu можно определить как:
mu (t) = expleft (int g (t) dtright)
Аналогичную процедуру можно использовать для определения условия, при котором дифференциальное уравнение имеет интегрирующий коэффициент, зависящий только от y.2 = С
Завершение всего
В этой обзорной статье исчисления III мы исследовали различные типы дифференциальных уравнений первого порядка, которые могут быть приняты. Теперь вы сможете определить тип дифференциального уравнения, а затем применить правильный метод его решения. Мы надеемся, что этот пост придаст вам больше уверенности в своих знаниях дифференциальных уравнений первого порядка и облегчит ваше изучение Calculus III.
Давайте применим все на практике.Попробуйте этот практический вопрос по дифференциальным уравнениям: Хотите узнать больше о дифференциальных уравнениях?Вы можете найти тысячи практических вопросов на Albert.io. Albert.io позволяет настроить процесс обучения так, чтобы он ориентировался на практику там, где вам больше всего нужна помощь. Мы зададим вам сложные практические вопросы, которые помогут вам овладеть дифференциальными уравнениями.
Начните практиковать здесь .n} y ′ + P (x) ⋅y = Q (x) ⋅yn, можно получить:
t ′ = (1 − n) (Q (x) −P (x) ⋅t) t ‘= \ left ({1 — n} \ right) \ left ({Q \ left (x \ right) — P \ left (x \ right) \ cdot t} \ right) t ′ = (1 − n) (Q (x ) −P (x) ⋅t) ⇒t ′ + (1 − n) P (x) ⋅t = (1 − n) Q (x) \ Rightarrow t ‘+ \ left ({1 — n} \ right) P \ left (x \ right) \ cdot t = \ left ({1 — n} \ right) Q \ left (x \ right) ⇒t ′ + (1 − n) P (x) ⋅t = (1− n) Q (x), которое есть не что иное, как линейное дифференциальное уравнение, метод решения которого уже обсуждался выше. x} y ′ + exy = ex.{- ax}}}} y = ab + C⋅e − ax1
где, C — постоянная интегрирования, а a, b уже известны. Следует отметить, что y = 0 всегда является решением данного уравнения, которое известно как его тривиальное решение , которое нельзя получить другими способами.
Пример — 3: Определите решение задачи начального значения t y ′ + 3y = 0t \, y ‘+ 3y = 0ty ′ + 3y = 0, y (1) = 2y \ left (1 \ right) = 2y (1) = 2, t> 0t> 0t> 0.
Решение:
После переписывания данного однородного дифференциального уравнения в его стандартной форме
y ′ + 3ty = 0y ‘+ \ frac {3} {t} y = 0y ′ + t3 y = 0, где P (t) = 3tP \ left (t \ right) = \ frac {3} {t} P (t) = t3.{- 3}} y = 2t − 3
Дифференциальные уравнения первого порядка и первой степени. Способы решения. Разделение переменных. Однородные, точные и линейные уравнения. Интегрирующие факторы. Уравнение Бернулли.
Дифференциальные уравнения первого порядка и первой степени. Способы решения. Разделение переменных. Однородные, точные и линейные уравнения. Интегрирующие факторы. Уравнение Бернулли.
SolitaryRoad.comВладелец сайта: Джеймс Миллер
[ Дом ] [ Вверх ] [ Информация ] [ Почта ]Дифференциальные уравнения первого порядка и первого порядка степень.Способы решения. Разделение переменных. Однородные, точные и линейные уравнения. Интеграция факторы. Уравнение Бернулли.
Дифференциальные уравнения первого порядка и первой степени. Любое дифференциальное уравнение первой степени и первой степени можно записать в форме
Пример. Дифференциальное уравнение
также можно записать как
(х — 3y) dx + (x — 2y) dy = 0
Наличие решения.Общее решение уравнения dy / dx = g (x, y), если оно существует, имеет форма f (x, y, C) = 0, где C — произвольная постоянная. При каких обстоятельствах общее решение существует? У нас есть следующая теорема.
Теорема 1. Общее решение dy / dx = g (x, y) существует над некоторой заданной областью R points (x, y), если выполняются следующие условия:
a) g (x, y) непрерывна и однозначна более
рэндб) ∂g / ∂y существует и непрерывна во всех точках R
Общее решение f (x, y, C) = 0 дифференциального уравнения dy / dx = g (x, y) в некоторой области R состоит из семейства кривых, называемых интегральными кривыми дифференциального уравнения (одна кривая для каждого возможного значения C, каждая кривая представляет конкретное решение), так что через каждая точка в R проходит одна и только одна кривая семейства f (x, y, C) = 0.
Дифференциальное уравнение
ассоциируется с каждой точкой (x 0 , y 0 ) в области R направление
Направление в каждой точке R — это направление касательная к этой кривой семейства f (x, y, C) = 0 что проходит через точку.
Область R, в которой направление связано с каждая точка называется полем направления. На рис. показаны поле направлений и интегральные кривые для дифференциальное уравнение dy / dx = 2x.Генерал решение этого уравнения есть y = x 2 + C. интегральные кривые — параболы.
Методы решения дифференциала уравнения первого порядка и первая степень
I Разделение переменных. Если уравнение
M (x, y) dx + N (x, y) dy = 0
можно привести в форму
P (x) dx + Q (y) dy = 0,
переменные считаются разделенными.Общее решение тогда дается
Пример. Решить
(1 + x 2 ) dy — xy dx = 0
Решение. Разделив на y (1 + x 2 ) и транспонировав, получим
Интегрируя обе стороны, получаем
ln y = ½ ln (1 + x 2 ) + ln C
или
ln y = ln C (1 + x 2 ) ½
Принимая экспоненты
y = C (1 + x 2 ) ½
Произвольная константа была добавлена в форме «ln C» для облегчения окончательного представления.
Однородные многочлены, функции и уравнения
Def. Однородный полином. Многочлен, все члены которого имеют одинаковую степень по всем переменным вместе взятым. Таким образом,
x 2 + 2xy — 2y 2 однородно степени 2
2x 3 y + 3 x 2 y 2 + 5y 4 однороден степени 4
2x + 5y однородно степени 1
Понятие однородности распространяется на общие функции следующим образом:
Def.Однородная функция. Функция такая, что если каждую из переменных заменить на k умноженное на переменную, k можно полностью исключить из функции всякий раз, когда k ≠ 0. Степень k, которое может быть исключено из функции, является степенью однородности функции. Таким образом,
2x 2 ln x / y + 4y 2 однородно степени 2
x 2 y + y 3 sin y / x однороден степени 3
II Однородные дифференциальные уравнения.Дифференциальное уравнение вида
M (x, y) dx + N (x, y) dy = 0
называется однородным, если M (x, y) и N (x, y) являются однородными функциями одного и того же степень. Такое уравнение можно преобразовать в уравнение, в котором переменные разделены заменой y = vx (или x = vy), где v — новая переменная.
Примечание. Дифференцирование y = vx дает dy = v dx + x dv, количество, которое необходимо заменить на dy когда vx заменяется y.
Пример. Решить
(x 2 — y 2 ) dx + 2xy dy = 0
Решение. Мы не можем разделить переменные, но M (x, y) и N (x, y) — однородные функции степени 2. Замена
y = vx и dy = v dx + x dv
получаем
(1 — v 2 ) dx + 2v (v dx + x dv) = 0
Разделение переменных дает
Интегрируя получаем
ln (v 2 + 1) = — ln x + ln C
Взяв экспоненты, получаем
х (v 2 + 1) = C
Наконец, поскольку v = y / x, это становится
x 2 + y 2 = Сх
Причина, по которой замена y = vx превращает уравнение в уравнение, в котором переменные разделимы.Причина, по которой замена y = vx превращает уравнение в одно в котором переменные разделимы, можно увидеть, когда данное уравнение записывается в виде
Если M (x, y) и N (x, y) — однородные функции одной степени и вместо y заменяется vx обнаруживается, что все x сокращаются в правой части 2), а правая часть становится функцией только в v, т.е. уравнение принимает вид
3) dy / dx = g (v)
Подстановка dy = v dx + x dv дает
4) v dx + x dv = g (v) dx
, где переменные могут быть разделены как
III Точные дифференциальные уравнения
Def.Точное дифференциальное уравнение. Дифференциальное уравнение, которое получается путем задания полный дифференциал некоторой функции равен нулю.
Полный дифференциал функции u (x, y) по определению равен
., а точное дифференциальное уравнение, связанное с функцией u (x, y), равно
Примитив 5) равен u (x, y) = C.
Если в данном дифференциальном уравнении
6) M (x, y) dx + N (x, y) dy = 0
количество
M (x, y) dx + N (x, y) dy
оказывается в точности полным дифференциалом некоторой функции u (x, y) i.е. если есть какие-то функция u (x, y) такая, что
, то 6) является точным дифференциальным уравнением и его примитивом является u (x, y) = C.
Поскольку обычно нельзя определить путем осмотра, является ли данное уравнение точным, нужен тест на точность. Этот тест дается следующей теоремой.
Теорема 2. Пусть M (x, y), N (x, y), ∂M / ∂y и ∂N / ∂x — непрерывные функции от x и y. потом необходимое и достаточное условие того, что дифференциальное уравнение
M (x, y) dx + N (x, y) dy = 0
, а точнее
Проба
Если дифференциальное уравнение точное, следующим шагом будет построение функции u (x, y), из которой M (x, y) dx + N (x, y) dy — полный дифференциал.Иногда это можно определить при осмотре. Чаще нет. Следующий пример иллюстрирует обычный метод решения.
Пример. Проверьте следующее уравнение на точность и найдите решение, если оно точное.
7) (3x 2 y — y) dx + (x 3 — x + 2y) dy = 0
Решение.
M = 3x 2 — y N = x 3 — x + 2y
∂M / ∂y = 3x 2 — 1 ∂N / ∂x = 3x 2 — 1
Так как ∂M / ∂y = ∂N / ∂x, уравнение является точным i.е. существует функция u (x, y), левая часть которой сторона 7) и есть полный дифференциал. Чтобы найти эту функцию, проинтегрируем ∂u / ∂x = M = 3x 2 — y относительно x, сохраняя y постоянным. Получаем
8) u (x, y) = ∫M ∂x = ∫ (3x 2 — y) ∂x = x 3 y — yx + φ (y)
, где φ (y) состоит из членов, свободных от x (∫M ∂x обозначает интегрирование по x, при постоянном y). Таким же образом интегрируем ∂u / ∂y = N = x 3 — x + 2y по y, с постоянным x.Получаем
9) u (x, y) = ∫N ∂y = ∫ (x 3 — x + 2y) ∂y = x 3 y — xy + y 2 + ψ (x)
, где ψ (x) состоит из членов, не содержащих y (т. Е. Членов, содержащих только x или константы).
Сравнивая 8) и 9), мы видим, что общее решение —
x 3 y — xy + y 2 = C
Пример из Миддлмисс.Дифференциальное и интегральное исчисление. п. 443
Существует формула, по которой можно получить решение. Это:
Формула общего решения точного уравнения M dx + N dy = 0. Общее решение предоставлено
∫ M ∂x + ∫f (y) dy = C
, где f (y) состоит из всех членов в N, не содержащих x (т.е. всех членов, не содержащих x — члены, содержащие только y или константы) и ∫M ∂x обозначает интегрирование по x, сохраняя y постоянным.
Альтернативная формула:
∫N ∂y + ∫f (x) dx = C
, где f (x) состоит из всех членов M, не содержащих y.
Приведенные выше формулы дают правильный результат в подавляющем большинстве случаев, но это не так. безошибочен и в исключительных случаях может дать неверный результат. Следовательно, решение должно всегда проверять, подставляя его в исходное уравнение.
Есть еще одна более сложная формула, которая также дает общее решение:
Формула общего решения.
где ∫M ∂x обозначает интегрирование по x, сохраняя y постоянным.
Вывод
IV Интегрирующие факторы. Если дифференциальное уравнение неточно, его можно составить точным путем умножения его на некоторую функцию. Например, уравнение
11) y dx + 2x dy = 0
не является точным, поскольку ∂M / ∂y ≠ ∂N / ∂x. Однако умножение его на y дает точное уравнение
y 2 dx + 2xy dy = 0
, в котором левая сторона в точности совпадает с дифференциалом xy 2 .Функция, которая при умножении в дифференциальное уравнение, делает его точным, называется интегрирующим множителем. В этом примере y — это интегрирующий коэффициент для 11).
Теорема 3. Пусть уравнение
12) M (x, y) dx + N (x, y) dy = 0
имеют решение f (x, y, C) = 0, где C — произвольная постоянная. Тогда, если уравнение 12) не точное, его всегда можно сделать точным, умножив его на некоторую правильную функцию от x и y т.е. существует некоторый интегрирующий множитель μ (x, y), который сделает его точным.Более того, если μ (x, y) — интегрирующий множитель для 12), то a · μ (x, y) также является интегрирующим множителем, где a — произвольный постоянный.
Таким образом, если пункт 12) разрешим, он либо точен, либо может быть уточнен с помощью некоторого интегрирующего множителя. Там Однако не существует общего правила для определения интегрирующего фактора. Теорема просто уверяет нас, что точная версия уравнения существует.
Условия для разрешимости 12) не очень строгие. Они сформулированы в теореме 1 выше.
Есть много уравнений, которые не интегрируются в существующем виде, но становятся интегрируемыми. при умножении на правильный коэффициент. Не существует общего метода определения правильного фактора, но во многих простых случаях его можно найти путем осмотра. Возможность сделать это во многом зависит от признание некоторых общих точных различий и на опыте. Один использует изобретательность и методом проб и ошибок, посредством манипуляции, возможно преобразование переменных, а некоторые умножая коэффициент, преобразуйте уравнение в уравнение, которое можно интегрировать.Например, если один замечает группы терминов «x dy — y dx» или «x dy + y dx» в уравнении, которое он может преобразовать уравнение в уравнение, которое можно интегрировать, используя множитель, который создает один из следующих точных дифференциалов:
Пример.Решите уравнение
(x 2 + y 2 + y) dx — x dy = 0
Решение. Запишем уравнение в виде
(x 2 + y 2 ) dx + y dx — x dy = 0
Вспоминая формулу
мы решаем умножить уравнение на коэффициент 1 / (x 2 + y 2 ), чтобы получить
или
Затем мы интегрируем, чтобы получить решение
Теорема 4.Дифференциальное уравнение вида
можно привести к виду
с помощью интегрирующего множителя
Его примитив —
.Пример. Решите уравнение
(3x 2 y — xy) dx + (2x 3 y 2 + x 3 y 4 ) dy = 0
Решение. Перепишем уравнение как
y (3x 2 — x) dx + x 3 (2y 2 + y 4 ) dy = 0
и умножьте на коэффициент 1 / yx 3 , что даст
Интегрируя, получаем примитив
Теорема 5.
a) Необходимое и достаточное условие для того, чтобы μ (x, y) была интегрирующим множителем для уравнения
13) M (x, y) dx + N (x, y) dy = 0
состоит в том, что он удовлетворяет уравнению
б) Если количество
является функцией только x, т.е.
, затем
— интегрирующий коэффициент для уравнения
M dx + N dy = 0.
в) Если количество
является функцией только y, т.е.
, затем
— интегрирующий коэффициент для уравнения
M dx + N dy = 0.
Проба
Пример. Решить y dx + (3 + 3x — y) dy = 0
Решение.
M = y N = 3 + 3x — y
∂M / ∂y = 1 ∂N / ∂x = 3
Сейчас
является функцией не только x, а
является функцией только y.Следовательно, интегрирующий коэффициент равен
.Если умножить уравнение на y 2 , можно убедиться, что оно становится точным и его решением является
xy 3 + y 3 — y 4 /4 = C
V Линейные уравнения первого порядка. Линейное уравнение первого порядка — это уравнение типа
Это уравнение имеет
в качестве интегрирующего фактора.Общее решение дается
Проба
Пример. Решить
Решение.
P = 2 / x
Умножая обе части уравнения на этот коэффициент и интегрируя, получаем
или
x 2 y = x 6 + C
Уравнение Бернулли.Уравнение
известно как уравнение Бернулли. Его можно преобразовать в линейное уравнение с помощью преобразование
14) y — n + 1 = v
где v — новая переменная.
Разделим 13) на y n , чтобы получить эквивалентное уравнение
Если мы теперь возьмем производную 14) по x, получим
Подставляя 14) и 16) в 15), получаем
или
, которое является линейным уравнением относительно переменной v.Теперь мы можем решить это уравнение методом для линейные уравнения.
Общее решение уравнения Бернулли —
Список литературы
1. Росс Р. Миддлмисс. Дифференциальное и интегральное исчисление. Глава. XXIX
2. Джеймс / Джеймс. Математический словарь.
3. Мюррей Р. Шпигель. Прикладные дифференциальные уравнения.
4. Джеймс Б. Скарборо. Дифференциальные уравнения и приложения.
5. Фрэнк Эйрес.Дифференциальные уравнения (Шаум).
6. Эшбах. Справочник по основам инженерии.
7. Эрл Рейнвилл. Элементарные дифференциальные уравнения.
Ещё с сайта SolitaryRoad.com:
Путь истины и жизни
Божье послание миру
Иисус Христос и Его учение
Мудрые слова
Путь просветления, мудрости и понимания
Путь истинного христианства
Америка, коррумпированная, развратная, бессовестная страна
О целостности и ее отсутствии
Проверка на христианство человека — это то, что он есть
Кто попадет в рай?
Высший человек
О вере и делах
Девяносто пять процентов проблем, с которыми сталкивается большинство людей. пришли из личной глупости
Либерализм, социализм и современное государство всеобщего благосостояния
Желание причинить вред, мотивация поведения
Обучение таково:
О современном интеллектуализме
О гомосексуализме
О самодостаточной загородной жизни, усадьбе
Принципы жизни
Актуальные притчи, заповеди, аранжировка Котировки.Общие поговорки. Альманах бедного Ричарда.
Америка сбилась с пути
Действительно большие грехи
Теория формирования характера
Моральное извращение
Ты то, что ты ешь
Люди подобны радиотюнерам — они выбирают и слушайте одну длину волны и игнорируйте остальные
Причина черт характера — по Аристотелю
Эти вещи идут вместе
Телевидение
Мы то, что мы едим — живем в рамках диеты
Как избежать проблем и неприятностей в жизни
Роль привычки в формировании характера
Истинный христианин
Что такое истинное христианство?
Личные качества истинного христианина
Что определяет характер человека?
Любовь к Богу и любовь к добродетели тесно связаны
Прогулка по пустынной дороге
Интеллектуальное неравенство между людьми и властью в хороших привычках
Инструменты сатаны.Тактика и уловки, используемые дьяволом.
Об ответе на ошибки
Настоящая христианская вера
Естественный путь — Неестественный путь
Мудрость, разум и добродетель тесно связаны
Знание — это одно, мудрость — другое
Мои взгляды на христианство в Америке
Самое главное в жизни — понимание
Оценка людей
Мы все примеры — хорошие или плохие
Телевидение — духовный яд
Главный двигатель, который решает, «кто мы»
Откуда берутся наши взгляды, взгляды и ценности?
Грех — серьезное дело.
Инженерный калькулятор hex онлайн: Lin.in.ua :: Конвертор чисел (HEX/BIN/DEC)
//Дневники чайника
Дневники чайникаСистемы счисления и устройство памяти.
Второй деньПоскольку компьютер в основе своей имеет только 0 и 1, на первых этапах освоения ассемблера (может быть, год) нам будут нужны только целые числа, мало того, очень долго можно работать всего лишь с положительными целыми числами, о которых здесь и пойдёт речь.
Только целые и только положительные.
Возможно, вы проходили эту тему в школе, и кто-то из вас даже что-то помнит, но начинать нужно именно отсюда.
Нас будут интересовать 3 системы счисления — dec, bin, hex.
Десятичная — Decimal (Dec или буква «d»)
Aрабская система — она называется десятичной, потому что в ней используются 10 символов.
0,1,2,3,4,5,6,7,8,9
Все значения представляются этими символами. Вы и сами знаете, как пользоваться десятичной системой, так как мы все выросли на ней и каждую минуту чего-нибудь считаем.
Запомни, юнга! В космосе нет верха, нет низа — это всё условности. И то, что у тебя десять пальцев на руках, это всего лишь исключение. У наших бинарных братьев всего два пальца, они смеются над тобой — урод десятипалый :). У них есть на это право, их больше и они старше. С Бинарниками надо дружить, иначе корабль собьют на подходе к первой же станции.
Двоичная система счисления — Binary (Bin или буква «b»)
Нетрудно догадаться, что двоичная система имеет всего два символа 0 и 1.
Компьютер — это очень простой прибор, в нём есть только выключатели — биты (вкл. =1, выкл. =0).
Понятие Bit, скорее всего, произошло от английских слов Binary — двоичная и Digit — цифра. Но поскольку битов о-о-очень много, биты строятся в байты.
11111111 - это байт 01010101 - и это байт 00000000 - и это тоже байт
Бит может иметь значение 0 или 1.
Байт — это 8 бит, и он может иметь значения от 0000 0000 — ноль, до 1111 1111 — 255 в десятичной системе (пробелы для читаемости). Получается, что у байта 256 значений (всегда считается вместе с нулевым).
биты dec-цифры | биты dec-цифры 00000001 = 1 | 00001011 = 11 00000010 = 2 ! | 00001100 = 12 00000011 = 3 | 00001101 = 13 00000100 = 4 ! | 00001110 = 14 00000101 = 5 | 00001111 = 15 00000110 = 6 | 00010000 = 16 ! 00000111 = 7 | 00010001 = 17 00001000 = 8 ! | 00010010 = 18 00001001 = 9 | 00010011 = 19 00001010 = 10 | 00010100 = 20 И так до 11111111 = 255.
Переводить из десятичных цифр в биты (то есть в двоичные цифры) и обратно можно на виндовом калькуляторе (в инженерном режиме). Потренируйтесь пока так. Учить наизусть всю таблицу не нужно, познакомились — уже хорошо. :)
Как вы думаете, почему я выделил 2,4,8,16?
Правильно, это «круглые» цифры. В десятичной системе они, конечно, не круглые, но в двоичной получается 10,100,1000,10000. Поэтому десятичная система для компьютерных вычислений не очень подходит. Вместо неё используется…
Шестнадцатиричная система счисления — Hexadecimal (Hex или буква «h»)
Имеет целых 16 символов. Чтоб не придумывать новые символы, в hex используются буквы латинского алфавита.
0, 1, 2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D, E, F - это цифры
Я приравняю все hex-символы к десятичным значениям.
h d h d h d h d 0=0 4=4 8=8 C=12 1=1 5=5 9=9 D=13 2=2 6=6 A=10 E=14 3=3 7=7 B=11 F=15
В этой системе счисления ноль справа прибавляется при умножении на 16 (десятичных).
Лишние нули слева от числа значения не имеют, так же, как и в математике.
Однако если число начинается с буквы (A-F), ноль слева нужен при наборе программ. Иначе как компилятор будет определять, что началось число? А чтобы не путать числа в разных системах и писать при этом коротко, пишут:
d — десятичные значения
01,02,03,04,05,06,07,08,09,10d,11d,12d,13d,14d,15d,16d,17d,18d,19d,20d...
h — шестнадцатиричные значения
01,02,03,04,05,06,07,08,09,0Ah,0Bh,0Ch,0Dh,0Eh,0Fh,10h,11h,12h,13h,14h...
b — двоичные значения
0,1,10b,11b,100b...
Вот примеры:
01 * 16d = 10h (получается 16d) 10h * 16d = 100h (получается 256d) 100h * 16d = 1000h (получается 4096d) 1 * 10h = 10h 10h + 10h = 20h 10h * 10h = 100h 100h + 100h = 200h 10b * 10b = 100b
Удобно, правда? А вот так?
10d + 10h = 1Ah или 26d
Неудобно. Поэтому всегда ВСЕ ВЫЧИСЛЕНИЯ ДЕЛАЙТЕ В ОДНОЙ СИСТЕМЕ!
Сам я никогда не перевожу из hex в dec и в bin в уме или на листочке, для этого есть калькулятор. И мне знакома эта растерянность перед новыми цифрами. Но я и не рассчитываю, что стало понятно хоть что-то. Просто вы должны знать, что системы счисления hex & bin существуют. Через месяц практики вы привыкнете к шестнадцатиричной системе как к родной. А вот двоичная будет использоваться только в пределах четырёх байт. На экране монитора мне лишь изредка приходится видеть биты как «01011010», хотя часто их очень не хватает.
Теперь ещё раз про байт.
bin-числа hex-числа 00001000 = 08 00010000 = 10h 00100000 = 20h 01000000 = 40h 10000000 = 80h ... 11111111b = FFh
В байт умещаются ровно два разряда hex-системы счисления! Именно так мы и будем видеть байты. Вспомните наш нулевой эксперимент:
байты в hex символы в кодировке DOS (Р - русская буква) 90 41 90 41 90 90 41 41 42 43 44 | РAРAРРAABCD
Теперь вы понимаете, что я имел в виду, сказав: «90 здесь 144». Правильнее было бы сказать 90h = 144d.
Байт это 8 бит, и что самое главное, байт — минимально адресуемая ячейка памяти.
Если нужно прочитать информацию, например, из бита 900, то нам нужно обратиться к 112-му байту и посмотреть в нём бит номер 4.
| Адрес в байтах | Информация в БИТАХ | | 76543210 - номера бит (разряд) ------|-------------------|----------------------------------------------- 111d | 0000006F | 00000000 112d | 00000070 | 000?0000 113d | 00000071 | 00000000 114d | 00000072 | 00000000Конечно же, в компьютере физически биты не разделяются пробелами. Вся оперативная память, например, — сплошной поток выключателей :).
Но при отображении биты обычно разделяют на:
байты — 8 бит, две hex-цифры, или
тетрады — 4 бита, одна hex-цифра.Обратите внимание на запись. Мы нумеруем биты справа налево и обязательно от нуля — это стандарт для учебников и документации. Кроме того, нумерация от нуля имеет математический смысл (разряды нужно осознать!).
Хотя так информацию мы видеть практически не будем. Вместо битов везде будут hex-байты, вот так:
Адрес в байтах | Информация в БАЙТАХ -------------------|--------------------------------------- 0000006F | 00 00000070 | 00 00000071 | 00 00000072 | 00или вот так:
Адрес в байтах | Информация в БАЙТАХ -------------------|--------------------------------------- 0000006F | 00 00 00 00Здесь вынужден заметить: адреса в файле и адреса в оперативной памяти — это совершенно разные вещи.
Далее по тексту я буду грубо писать: «адрес в памяти», под этими словами мы будем подразумевать часть логического адреса, которую принято называть смещением (offset). В рамках наших уроков смещение — вполне достаточный адрес в памяти. Однако смещение — это не полный логический адрес и называть смещение адресом без оговорок — довольно грубо! В следующем витке мы обязательно разберём адресацию памяти в разных режимах процессора, и там я расскажу, что такое сегмент и смещение.
А сейчас запомните. Когда я пишу: адрес в файле, я подразумеваю номер байта в файле от нуля. И это норма. А вот когда я пишу: адрес в памяти, это значит, что речь идёт о части логического адреса, называемой смещением (тоже от нуля).
Да простят меня профи за такую вольность.
Юнга, после обеда я научу тебя писать дельные программы для вспомогательного бортового оборудования. Ты, конечно, пуст, как первая ступень, и ни черта не понял за сегодня, но у меня нет времени рассусоливать, нас давно ждут.
Первая полезная программа
Что там у нас дальше по учебнику? Этого вам пока не надо… Этого я и сам ещё не знаю… Тут слишком много умностей… Нет, пожалуй, продолжу, как предложил Олег Калашников. Пожалуй, лучший подход для любителей практики.
Эксперимент 01 (prax01.com)
Я по-прежнему подразумеваю, что вы используете WinXP и пример должен работать.
Создайте файл с расширением «com» (напомню в FAR’e — Shift+F4). Назвав файл, напечатайте в нём любую букву или цифру, ну, допустим, «1». Сохраните файл (в FAR’e — Esc).
Нет, это ещё не программа, этот файл выполнять не нужно. Откройте в Hiew’e.
Сейчас вы видите 1, если нажать «F4» (Mode), то, как и в тот раз, вы увидите байт в hex-виде. F4 еще раз покажет дизассемблерный код. Если в файле единица, то выглядеть код будет так:
Адреса Байты Имена Операнды 00000000: 31 xor [bx][si],ax
В отличие от команды nop, которую вы уже видели, большинство команд используют предметы для действия.
Предмет, с (или над) которым производится действие, называется операнд.
Операнды в ассемблере для Интел-совместимых процессоров принято разделять запятыми. То есть в некоторых системах или в других языках программирования пишут:
AX xor 44
или вполне может быть такая форма записи:
44,55 xоr AX
Но в x86 ассемблере принято писать так:xor AX,44 где AX - операнд 1 (он же приёмник), а 44 - операнд 2 (он же источник).
Из всего этого главное сейчас усвоить, что операндов не больше трёх (чащё всего 2), они разделяются запятыми и идут после имени команды. Давайте писать настоящую программу на ассемблере.
В Hiew’e (когда вы видите дизассемблерный код нашего файла) нажмите F3 и затем Enter. Теперь можно набирать программу на ассемблере (символ «1» в файле должен стереться). Каждая инструкция вводится Enter’ом и превращается в строку, если нет явной ошибки. Пробелы нужны только для удобства, поэтому неважно, сколько их. Пишите как хотите, строчными или прописными буквами, но только по-англицки. :)
Вот код программы, его нужно набрать:
mov ah,9 mov dx,10Dh int 21h mov ah,10h int 16h int 20h
Когда всё напишете, нажмите один раз Esc, чтобы прекратить ассемблирование, и F9, чтобы сохранить файл.
Это был весь код программы, которая должна выводить строку на экран! Круто, правда? Только не хватает самой строки.
Для того, чтоб вписать строку, нужно открыть файл в текстовом редакторе (в FAR’e — F4).
Допишите после всех закорючек (только не сотрите ничего) любую текстовую строку и в конце поставьте знак $.
Это может выглядеть примерно так:
_?_? _?_?_?_?_Good Day!$
Закорючки будут другие, но вид такой. Сохраните программу. Откройте снова в Hiew’e.
Адреса Маш.команды Команды Асма комментарии Байты Имена Операнды 00000000: B409 mov ah,009 ; Поместить значение 9 в регистр AH (параметр1) 00000002: BA0D01 mov dx,0010D ; Поместить адрес текстовой строки в DX (параметр2) 00000005: CD21 int 021 ; Вызвать подпрограмму, в которой ; отработает функция вывода текста на экран (AH=09) 00000007: B410 mov ah,010 ; Поместить значение 10h в регистр AH (параметр1) 00000009: CD16 int 016 ; Вызвать подпрограмму ожидания нажатия клавиши 0000000B: CD20 int 020 ; Подпрограмма завершения 0000000D: 47 inc di 0000000E: 6F outsw 0000000F: 6F outsw 00000010: 64204461 and fs:[si][61],al 00000014: 7921 jns 000000037 ---X 00000016: 24 and al,000Принято так, что после точки с запятой идёт комментарий, просто пояснение для людей. В этом примере я откомментировал все строки кода программы. Только вам от этого пока не легче.
Видите, начиная с адреса в файле 0000000Dh, появились команды, которые вы не писали, это всего лишь строка текста. Её процессор выполнять не будет только потому, что перед строкой текста стоит код завершения (int 20).
Запустите программу (можно из проводника)… Если компьютер с вами поздоровался — я вас тоже поздравляю! Значит, у вас есть шанс научить его делать и более сложные вещи.
Вы увидите окно DOS-приложения с текстом:
Good Day!
Нажатие на любую клавишу вызовет выход из программы.Если же этого не произошло — не расстраивайтесь. Перепроверьте всё несколько раз, может быть, вы опечатались. Прочитайте «Аннотацию» в последней главе или комментарии. Я пока ничего подобного не написал, но, возможно, когда-нибудь придётся. Ведь у нас нет гарантии, что новые твАрения MS или других «рук» не изменят ситуацию в худшую сторону. Хотя, будем надеяться, что программа заработает и на новых OS’ях и процессорах.
«$» не выводится. Хм, интересно :/ Это условный символ конца строки?
Да, но в windows мы будем использовать нулевой байт (00h) для этой же цели.
Вот, уже получилась полнофункциональная программа для DOS, которая будет работать и в Windows.
Прямо так и вижу следующие «почему»:
Почему mov?
Почему ah?
Почему 9?
И вообще, что это за подпрограммы-прерывания int 16, int 21, int 20.Последний вопрос меня тоже очень огорчил, когда впервые столкнулся с этим примером. Я ожидал получить программу на чистом Ассемблере, а был вынужден использовать какие-то непонятные функции, которых не писал.
На самом деле вывод строки на экран без специальной DOS-функции ничуть не сложнее. Мы используем именно такой способ из-за того, что он наиболее схож с программированием под Win. Здесь было бы аккуратнее и быстрее выводить на экран без специальной подпрограммы DOS-функций.
Но ДОС в прошлом, а нас ждёт Win32.
Cамое главное не переживать, если вы вдруг не понимаете что здесь к чему, поверьте, через пару уроков вы полностью поймёте эту программу.
Мы завтра весь день будем искать ответ на вопрос «Почему ah», так как этот «почему» — самый важный во всём ассемблере. Серьёзно!
Bitfry
Инженерный калькулятор онлайн | Дорога к Бизнесу за Компьютером
Вашему вниманию представлен лучший инженерный калькулятор онлайн, который только можно себе вообразить. Впрочем, не только инженеры могут им воспользоваться. Его можно применять в самых разных областях человеческой деятельности, там, где требуются вычисления.
Этот калькулятор поможет школьникам и студентам, которые на нем могут проверить правильность своих расчетов, а также преподавателям, которым приходится порой проверять за вечер сотни домашних заданий.
Данный калькулятор онлайн будет очень полезен людям, которые по роду своей деятельности постоянно занимаются расчетами и вычислениями: инженерам, финансистам, бухгалтерам, бизнесменам.
И главное его преимущество перед другими аналогичными калькуляторами в том, что он позволяет не только производить различные математические действия, но делать это, рассчитывая результат целых формул.
Например, как Вам такая формула? И сколько времени уйдет на ее решение на обычном калькуляторе?
А на данном калькуляторе онлайн задача решается довольно просто, за несколько минут — Вы просто начинаете прописывать цифры и производить с ними определенные действия, и формируете нужную Вам формулу, используя скобки.
Если Вы не вполне себе представляете, как это сделать — видео внизу Вам в помощь.
На этом калькуляторе онлайн Вы можете работать со степенями и корнями, извлекать логарифмы, и использовать тригонометрические функции.
Экран калькулятора онлайн отображает введенное выражение привычным для нас образом, так, как мы его записываем на бумаге.
В поле ввода данные можно вводить как с помощью кнопок калькулятора, так и с помощью клавиатуры компьютера. Например, можно нажать кнопку cos, а можно прописать это слово с помощью клавиатуры буквами. Вместо кнопки Равно можно нажать клавишу Enter, вместо кнопки С — клавишу Esc, а чтобы убрать символы по одному, можно нажать верхнюю правую клавишу калькулятора со стрелкой, или использовать клавишу Backspace.
Формулы можно корректировать — Вы просто ставите курсор в нужное место на поле ввода, затем убираете или добавляете символы или цифры.
При вводе чисел вместо десятичной запятой используйте точку.
Старайтесь также закрывать все скобки. В большинстве случаев это некритично, и калькулятор сам подставит нужные скобки, но иногда возможны ошибки. Впрочем, Вы сами легко увидите неточность в отображаемой формуле, и ее исправите.
О точности калькулятора онлайн можно судить, решив древнюю задачу о зернах на шахматной доске. Кто не помнит — изобретатель шахмат запросил с царя, которому шахматы понравились, следующую награду: на одну клетку шахматной доски нужно было положить одно пшеничное зернышко, на вторую — два, на третью — четыре, и так далее, увеличивая каждый раз количество зернышек вдвое, пока не закончатся все 64 клетки. Изобретатель сказал, что заберет эти зерна себе. Вы можете подсчитать, сколько зерен должно было быть на последней клетке. Решение — не что иное, как 2 в степени 64. Даже Excel выдает при вычислении этого количества округленный результат. А этот калькулятор подсчитает Вам все точно:
Или, например, сложение большого количества чисел. Особенно это актуально для бухгалтеров, которым иногда приходится складывать целые ряды чисел. Если это делать на обычном калькуляторе — вычисления превращаются в утомительный и выматывающий труд. Кроме того, никогда нет уверенности в правильности результата, недаром бухгалтера обычно пересчитывают все по два раза. А с этим калькулятором задача становится довольно простой — все числа видны на экране, и правильность их ввода легко проверить, и если надо, ввод исправить.
Одним словом, возможности данного инженерного калькулятора онлайн удовлетворят даже самого взыскательного пользователя. Потому — пользуйтесь, и желаю Вам комфортных и правильных расчетов.
Видео о том, как вводить формулы в инженерном калькуляторе онлайн
Более подробные сведения Вы можете получить в разделах «Все курсы» и «Полезности», в которые можно перейти через верхнее меню сайта. В этих разделах статьи сгруппированы по тематикам в блоки, содержащие максимально развернутую (насколько это было возможно) информацию по различным темам.
Также Вы можете подписаться на блог, и узнавать о всех новых статьях.
Это не займет много времени. Просто нажмите на ссылку ниже:
Подписаться на блог: Дорога к Бизнесу за КомпьютеромПроголосуйте и поделитесь с друзьями анонсом статьи на Facebook:
Калькулятор онлайн. Бесплатный калькулятор
Калькулятор онлайн — это столь необходимый, всегда доступный в вашем браузере инструмент для широкого круга людей, которым необходимо быстро произвести расчеты, не обращаясь к каким-либо прикладным программам. Этот онлайн калькулятор, который мы предлагаем использовать прямо на нашем сайте, лишен недостатков многих подобных сервисов и прикладных приложений, таких как неверные результаты вычислений или недостаточный математический функционал. Наш один из лучших и самых мощных калькуляторов предназначен для любых, простых и сложных вычислений: проценты, тригонометрические функции, логарифмы, извлечение корней и многое другое из области высшей математики.
Если калькулятор не отображается — обновите страницу!
Одна из главных особенностей нашего калькулятора — это способность построения графиков, эта редкая функция пригодится как школьникам и студентам, так и людям занимающимся научной деятельностью. Наш сервис рассчитан не только на студентов и научных сотрудников, он может быть полезен и представителям бизнеса, бухгалтерам, финансистам и многим другим людям, чья профессиональная деятельность сопряжена с частыми математическими вычислениями. Теперь вам не надо искать на компьютере программу для вычислений, или носить с собой счетную машинку, достаточно перейти на этот сайт и воспользоваться калькулятором онлайн
Бесплатный калькулятор — это наш новый онлайн сервис, в основе которого — идея предоставить всем посетителям сайта неограниченный доступ к калькулятору бесплатно с любого компьютера, планшета или смартфона. Круглосуточно, в любом месте где есть Интернет! На сайт предлагает воспользоваться этим бесплатным калькулятором с широчайшими возможностями без регистрации пользователя.
Этот бесплатный калькулятор достаточно прост и легок в освоении, но далеко не все смогут использовать все функциональные возможности калькулятора без специальной инструкции, которую мы подготовили для вас. Инструкция подробно проинформирует вас о правильных обозначениях математических действий и обо всех функциях калькулятора на конкретных примерах. Все это для того, чтобы вам было легко и удобно пользоваться нашим калькулятором.
В зависимости от ваших требований и уровня сложности вычислений, калькулятор можно использовать как обычный калькулятор — для выполнения основных арифметические операции, или как инженерный калькулятор — для математических вычисления повышенной сложности с привлечением дополнительных функций. Для всех видов операций с бесплатным калькулятором найдутся примеры в инструкции.
Чтобы воспользоваться калькулятором — необходимо вводить числа и знаки с помощью манипулятора (мышки), нажимая на кнопочную панель самого калькулятора. Последовательность введенных математических выражений будет отображаться на виртуальном дисплее, а после нажатия на кнопку «равно» калькулятор моментально произведет расчеты и выдаст требуемый результат, не удаляя с «дисплея» саму последовательность. Можно производить расчеты и с клавиатуры, для этого, прежде всего, щелкните один раз левой кнопкой мыши на поле ввода данных. После этого начинайте ввод данных с цифровой панели клавиатуры. Нажатие на клавишу «enter» равносильно кнопки «равно». Подробнее об управлении математическим калькулятором смотрите в инструкции с примерами.
Надеемся, вам понравится наш бесплатный онлайн калькулятор!
Калькулятор онлайн для расчетов процентов, дробей, степеней
Функции онлайн-калькулятораФункции онлайн-калькулятора
Калькулятор давно и прочно вошел в нашу жизнь. Мы часто пользуемся им в повседневной жизни подбивая свои расходы за день, неделю, рассчитывая выплату коммунальных за месяц и т.д. С помощью онлайн калькулятора осуществляют простые арифметические расчеты студенты и школьники, продавцы в магазинах, торговцы на рынках, работники коммунальных служб, что позволяет сэкономить время, получить точные расчеты, избежать досадных ошибок.Клавиша Символ Операция pi pi Постоянная pi е е Число Эйлера % % Процент ( ) ( ) Открыть/Закрыть скобки , , Запятая sin sin (α) Синус угла cos cos (β) Косинус tan tan (y) Тангенс sinh sinh () Гиперболический синус cosh cosh () Гиперболический косинус tanh tanh () Гиперболический тангенс sin-1 asin () Обратный синус cos-1 acos () Обратный косинус tan-1 atan () Обратный тангенс sinh-1 asinh () Обратный гиперболический синус cosh-1 acosh () Обратный гиперболический косинус tanh-1 atanh () Обратный гиперболический тангенс x2 ^2 Возведение в квадрат х3 ^3 Возведение в куб xy ^ Возведение в степень 10x 10^() Возведение в степень по основанию 10 ex exp () Возведение в степень числа Эйлера vx sqrt (x) Квадратный корень 3vx sqrt3 (x) Корень 3-ей степени yvx sqrt (x,y) Извлечение корня log2x log2 (x) Двоичный логарифм log log (x) Десятичный логарифм ln ln (x) Натуральный логарифм logyx log (x,y) Логарифм I / II Сворачивание/Вызов дополнительных функций Unit Конвертер величин Matrix Матрицы Solve Уравнения и системы уравнений Построение графиков Дополнительные функции (вызов клавишей II) mod mod Деление с остатком ! ! Факториал i / j i / j Мнимая единица Re Re () Выделение целой действительной части Im Im () Исключение действительной части |x| abs () Модуль числа Arg arg () Аргумент функции nCr ncr () Биноминальный коэффициент gcd gcd () НОД lcm lcm () НОК sum sum () Суммарное значение всех решений fac factorize () Разложение на простые множители diff diff () Дифференцирование Deg Градусы Rad Радианы Виды калькуляторов
В зависимости от возможностей и сферы применения калькуляторы бывают простые, бухгалтерские, финансовые, инженерные.
- Бухгалтерскими калькуляторами пользуются бухгалтера и кассиры для арифметических расчетов с денежными суммами.
- Для финансовых расчетов пользуются финансовыми калькуляторами, у которых к стандартному набору математических функций добавлены операции со сложными процентами и функции, характерные для банковской сферы и финансовых приложений.
- Специализированные — это калькуляторы, применяемые для вычислений в конкретной сфере деятельности (строительные, ипотечные, статистические, медицинские).
- Печатающие — калькуляторы, которые с помощью печатающего устройства выводят полученные результаты, расчеты, графики и вычисления на бумажную ленту.
Отдельно выделяются:
- программируемые калькуляторы, используемые для выполнения сложных вычислений по заранее заложенной программе пользователя;
- графические, выполняющие построение и отображение графиков функций.
Простейший калькулятор предназначен выполнять ординарные арифметические расчеты (сложение, вычитание и т.п.), вычислять процент, извлекать квадратный корень, возводить число в степень. Помимо простых расчетов, строителям и архитекторам, инженерно-техническим и научным работникам, математикам и геодезистам, старшеклассникам и студентам технических специальностей очень часто приходится решать важнейшие инженерные задачи, осуществлять сложные математические расчеты.
Представленный на сайте тригонометрический калькулятор выполняет расчет:
- синусов;
- косинусов;
- тангенсов;
- котангенсов.
А также обратных тригонометрических функций:
- арксинусов;
- арккосинусов;
- арктангенсов;
- арккотангенсов.
Все тригонометрические расчеты с углами выполняются в радианах, градах и градусах.
На нашем сайте вы сможете пользоваться инженерным онлайн калькулятором, предназначенным для инженерных и научных расчетов разного уровня сложности.
Инженерный калькулятор позволяет:
- производить сложные расчеты с дробями;
- возводить любое число в степень, извлекать корень из числа;
- рассчитать онлайн проценты, логарифмы, интегралы любой сложности;
- выполнять необходимые математические операции с одной или несколькими матрицами;
- находить производную онлайн как от элементарной, так и от сложной функции;
- решать алгебраические, линейные, логарифмические, тригонометрические и другие уравнения.
Онлайн калькулятор прост и понятен в обращении, применять его не составит труда тем, кто пользуется настольным инженерным калькулятором, принципы работы функций и программ аналогичны. По своему виду инженерный калькулятор онлайн имитирует настоящий калькулятор, поэтому для ознакомления с ним вам не понадобится много времени.
Онлайн Калькулятор
Этот удобный калькулятор производит элементарные арифметичиеские операции (сложение, вычитание, умножение, деление) с положительными и отрицательными целыми числами и дробями. Доступны действия с процентами, возведение в степень, вычисление корня из числа, а также логарифм.
Для всех возможных действий приведены примеры. Если вам нужны дополнительные функции, то откройте инженерный калькулятор.
Арифметические операции
Сложение
Сложение объединяет два числа (слагаемые) в одно (сумму чисел).
2 + 3 =
Вычитание
Вычитание является обратной операцией к сложению. Вычитание находит разность между двумя числами (уменьшаемое число минус вычитаемое).
3 − 2 =
Умножение
Умножение объединяет два числа в одно число – произведение чисел. Два исходных числа называются множимым и множителем.
2 × 3 =
Деление
Деление является обратной операцией к умножению. Деление находит частное от двух чисел (делимого, поделенного на делитель). Деление любого числа на 0 не определено.
4 ÷ 2 =
Действия с дробями
Дробь представляет собой часть целого или, в более общем смысле, любое количество равных частей. Обычная (простая) дробь состоит из числителя, отображаемого над чертой (или перед косой чертой), и ненулевого знаменателя, отображаемого ниже (или после) черты. Действия с дробями производятся так же, как и с целыми числами.
1 ÷ 2 + 1 ÷ 4 =
Десятичные дроби
Десятичная дробь — это дробь, знаменатель которой не указан явно, но понимается как целое число, равное десяти в степени один (10), два (100), три (1000) и так далее.
. 2 + . 0 3 =
Нахождение обратного числа
Обратное число к x, обозначаемое 1/x или x-1, представляет собой число, которое при умножении на x дает единицу.
2 1/x =
Действия с процентами
Процент — сотая часть (обозначается знаком %), используется для обозначения доли чего-либо по отношению к целому.
Нахождение процента от числа
40 × 5 % =
Увеличение (уменьшение) числа на процент
40 + 5 % =
Возведение в степень
Возведение в степень — математическая операция, записанная как xy, включающая два числа: основание x и показатель степени (или степень) y. Когда y — положительное целое число, возведение в степень соответствует многократному умножению основания на себя: то есть, xy — произведение умножения y оснований.
2 xy 4 =
Возведение числа в квадрат
Выражение x2 называется «квадратом x» или «x в квадрате», потому что площадь квадрата с длиной стороны x равна x×x или x2.
2 x2 =
Возведение числа в куб
Выражение x3 называется «кубом x» или «x в кубе», потому что объем куба с длиной стороны x равен x×x×x или x3.
2 x3 =
Возведение в степень числа 10
Возведение в степень с основанием 10 используется для обозначения больших или малых чисел. Например, 299792458 м/с (скорость света в вакууме в метрах в секунду) можно записать как 2,99792458 × 108 м/с, а затем округлить до 2,998 × 108 м/с.
4 10x =
Мнимая единица
Мнимая единица i определяется только тем свойством, что её квадрат равен −1.
i x2 =
Корень из числа
В математике y-ый корень числа x, где y обычно является положительным целым числом, представляет собой число z, которое при возведении в степень y дает x, где y — степень корня.
16 y√x 4 =
Квадратный корень
Квадратный корень числа x — это число z, которое в квадрате становится x.
9 √x =
Кубический корень
Кубический корень числа x — это число z, куб которого является x.
8 3√x =
Вычисление логарифма
Логарифм заданного числа x является показателем степени, в которую должно быть возведено другое фиксированное число (основание) y, чтобы получить это число x.
log 8 , 2 =
Десятичный логарифм
Десятичным логарифмом является логарифм с основанием 10.
log 100 =
Натуральный логарифм
Натуральный логарифм числа — это его логарифм по основанию число е.
log 3 , e =
Инженерный калькулятор онлайн
Цель сайта Рассчитать Онлайн РУ — дать возможность пользователю произвести сложный или простой расчет удобно и бесплатно, находясь в любой точке мира, главное иметь доступ к интернету. Мы активно работает над внедрением любых калькуляторов, но если у Вас есть идея и Вы хотите что бы она появилась на нашем сайте, воспользуйтесь формой обратной связи, мы будем благодарны за любые идеи по улучшению и расширению сервиса. Цифры и операторы можно вводить прямо с клавиатуры. Удачного использования!
Инструкция к вычислению, описание режимов
Комплексные числа
Определение комплексных чисел
Комплексное число — это выражение вида a + bi, где a, b — действительные числа, а i — так называемая мнимая единица, символ, квадрат которого равен –1, то есть i2 = –1. Число a называется действительной частью, а число b — мнимой частью комплексного числа z = a + bi.Абсолютная величина
Синтаксис:
abs(a)Входные аргументы:
a: ЧислоПримеры использования:
abs(5.5)
abs(-5.5)
abs(5.5+6.6i)
abs(-5.5-6.6i)Фаза (угол)
Синтаксис:
arg(a)Входные аргументы:
a: ЧислоПримеры использования:
arg(5.5)arg(-5.5)
arg(5.5+6.6i)
arg(-5.5-6.6i)
Комплексные числа i
Примеры использования:
3+5iДействительная часть
Синтаксис:
re(a)Входные аргументы:
a: ЧислоПримеры использования:
re(5.5)re(-5.5)
re(5.5+6.6i)
re(-5.5-6.6i)
Мнимая часть
Синтаксис:
im(a)Входные аргументы:
a: ЧислоПримеры использования:
im(5.5)im(-5.5)
im(5.5+6.6i)
im(-5.5-6.6i)
Интегралы и дифференциалы
Интегралы
Синтаксис:
int(a)
int(a, b)
int(a, b=c.2+3x-3=9 )Линейная алгебра
Векторы
Синтаксис:
a + bВходные аргументы:
a: Вектор
b: ВекторПримеры использования:
(1, 2, 3)+(4, 5, 6)Умножение векторов
Синтаксис:
a * bВходные аргументы:
a: Вектор
b: ВекторПримеры использования:
(1, 2, 3)*(4, 5, 6)Векторное произведение векторов
Синтаксис:
a # bВходные аргументы:
a: Вектор
b: ВекторПримеры использования:
(1, 2, 3)#(4, 5, 6)Умножение матриц
Синтаксис:
a * bВходные аргументы:
a: матрица
b: матрицаПримеры использования:
[[1, 2, 3][4, -5, 6][7, 8, 9]]*[[9, 8, 7][6, -5, 4][3, 2, 1]]Матрично-векторное произведение
Синтаксис:
a * b
Входные аргументы:
a: матрица
b: Вектор
Примеры использования:
[[1, 2, 3][4, -5, 6][7, 8, 9]]*(1, 2, 3)Детерминант (определитель) матрицы
Синтаксис:
det(a)Входные аргументы:
a: матрицаПримеры использования:
det([[1, 2, 3][4, -5, 6][7, 8, 9]])Абсолютная величина
Синтаксис:
len(a)Входные аргументы:
a: ВекторПримеры использования:
len((1, 2, 3))Действия с величинами (конвертирование, мат.5
Целая часть (отбрасывает все цифры после запятой)
Синтаксис:
ceil(a)Входные аргументы:
a: ЧислоПримеры использования:
ceil(5)ceil(5.2)
ceil(5.7)
Округление до целых (по правилам)
Синтаксис:
floor(a)Входные аргументы:
a: ЧислоПримеры использования:
floor(5)floor(5.2)
floor(5.7)
Логарифм
Синтаксис:
log(a)
log10(a)
log(a, b)Входные аргументы:
a: Число
b: (Optional) ЧислоПримеры использования:
log(100)log10(100)
log(8, 2)
Натуральный логарифм
Синтаксис:
ln(a)Входные аргументы:
a: ЧислоПримеры использования:
ln(100)или
Синтаксис:
lg(a)Входные аргументы:
a: ЧислоПримеры использования:
lg(8)Минимальное значение
Синтаксис:
min(a, b)Входные аргументы:
a: Число
b: ЧислоПримеры использования:
min(8, 4)Максимальное значение
Синтаксис:
max(a, b)Входные аргументы:
a: Число
b: ЧислоПримеры использования:
max(8, 4)Квадратный корень
Синтаксис:
sqr(a)
sqr2(a)
sqr3(a)
sqr(a, b)Входные аргументы:
a: Число
b: (Optional) ЧислоПримеры использования:
sqr(9)sqr3(27)
sqr(27, 3)
Поддерживаемые функции:Калькулятор поддерживает общепринятые функции, например, модуль x или |x|
acos(x) Функция — арккосинус от x, необходимо нажать на кнопку 2nd для активации
acosh(x) Арккосинус гиперболический от x, необходимо нажать на кнопку 2nd для активации
asin(x) Арксинус от x, необходимо нажать на кнопку 2nd для активации
asinh(x) Арксинус гиперболический от x, необходимо нажать на кнопку 2nd для активации
atg(x) Функция — арктангенс от x, необходимо нажать на кнопку 2nd для активации
atgh(x) Арктангенс гиперболический от x, необходимо нажать на кнопку 2nd для активации
e число, которое примерно равно 2.2+3x-3=9 )Расчет периметра прямоугольника:
Работа с дробями:
- Дано: 9/2 и 3/5, количество дробных чисел может быть любым.
- 9/2 (любой математически оператор) 3/5
Вычисление объема:
- Объем цилиндра равен произведению площади основания на высоту.
- Объем цилиндра равен произведению числа пи (3.1415) на квадрат радиуса основания на высоту.
Вычисление:
Наши полезные калькуляторы:
Калькулятор онлайн, инженерный, научный
Обычный калькулятор
Инженерный калькулятор
Anon: 2015-10-12 23:37:39
Матрица:
умножение- [[1, 2, 3][4, -5, 6][7, 8, 9]]*[[9, 8, 7][6, -5, 4][3, 2, 1]]
- [[1, 2, 3][4, -5, 6][7, 8, 9]]*(1, 2, 3)
- det( [[1, 2, 3][4, -5, 6][7, 8, 9]] )
Ivan: 2020-11-24 11:55:58 Для этого калькулятора под силу выполнить и арифметические действия, и сложные математические расчеты. Инженерный калькулятор позволяет выполнять сложные операции, такие как экспонента, логарифм, проценты, косинус, синус, тангенс, арксинус, арктангенс, арккосинус, возведение в степень и другие операции; имеет огромное количество функций. Расчет факториалов, логарифмов, решение квадратных уравнений, тригонометрических функций, вычисления коэффициентов. Можно набирать прямо с клавиатуры. Набор функций разнообразный. Калькулятором могут пользоваться все.
Обычный калькулятор позволяет выполнять сложение, вычитание, умножение, деление. работа с цифрами в стандартном виде. Калькулятор онлайн – довольно простое в управлении приложение. Он удобен и прост.
Используйте имя пользователя: Guest, Anonymous, ProgrammerСмешные анекдоты, приколы
Труд сделал из обезьяны человека. Поэтому, чтобы оставаться людьми, мы все должны работать — как обезьяны.
— Что ваш сын собирается делать после школы? — Если он будет учиться, как сейчас, то сразу после окончания школы он уйдёт на пенсию по возрасту.
Чтобы пережить нынешний финансовый кризис, надо быть очень крупным бизнесменом. Причем настолько крупным, чтобы застрять в оконном проеме даже с разбега.
Двоичный ⇄ шестнадцатеричный преобразователь с шагами
Метод шестнадцатеричного преобразования в двоичное
Это преобразование может быть выполнено путем нахождения двоичного эквивалента каждой цифры шестнадцатеричного числа и их объединения в одном и том же порядке. Приведенные ниже шаги могут быть полезны для изучения и практики выполнения шестнадцатеричного преобразования в двоичное.
шаг 1: Разделите цифры данного шестнадцатеричного числа, если их больше 1.
шаг 2: Найдите эквивалентное двоичное число для каждой цифры шестнадцатеричного числа, добавьте 0 слева, если какой-либо из двоичных эквивалентов короче 4 бит.
шаг 4: Записать двоичные числа всех групп вместе, поддерживая одинаковый порядок групп, обеспечивая эквивалентный двоичный код для данного шестнадцатеричного числа.Решенный пример проблемы
Решенный ниже пример проблемы может быть полезен для понимания того, как выполнить преобразование шестнадцатеричного числа в двоичное.Задача
Преобразуйте шестнадцатеричное число 9DB.A5 16 в его двоичный эквивалент.
Десятичная, двоичная, восьмеричная и шестнадцатеричная система счисления — таблица преобразования
Ниже представлена таблица преобразования десятичной, двоичной, восьмеричной и шестнадцатеричной систем счисления.
Пользователи могут использовать вышеуказанный конвертер, работать с шагами, решенными примерами и таблицей преобразования, чтобы изучить, попрактиковаться и проверить, как эффективно выполнять преобразование двоичного кода в шестнадцатеричный и шестнадцатеричный в двоичный.»;Таблица преобразования для десятичных, двоичных, восьмеричных и шестнадцатеричных систем счисления Десятичное двоичный восьмеричное шестигранник 0 0000 0 0 1 0001 1 1 2 0010 2 2 3 0011 3 3 4 0100 4 4 5 0101 5 5 6 0110 6 6 7 0111 7 7 8 1000 10 8 9 1001 11 9 10 1010 12 A 11 1011 13 B 12 1100 14 С 13 1101 15 D 14 1110 16 E 15 1111 17 F Scientific с шестнадцатеричным / двоичным преобразованием: калькуляторы
(Если вы хотите пропустить унижение и предысторию, вопрос чуть ниже)
Во-первых, прошу прощения; Вы собираетесь прочитать еще один запрос на рекомендацию калькулятора, в котором будет задан вопрос о Casio 991EX.
Во-вторых, в свою защиту, позвольте мне сказать, что я действительно считаю, что я провел довольно много исследований здесь и через Google, не вполне удовлетворив себя.
Я держу TI-что угодно рядом с моей клавиатурой с тех пор, как мой первый урок математики в средней школе потребовал его покупки.Я редко бываю без компьютера, но я нахожу физическое устройство довольно удобным для быстрой проверки моих математических расчетов (я инженер, а это значит, что я могу выполнять преобразования Фурье во сне, но я потерял базовые навыки пятиклассник). Однако за пределами математического класса мне никогда не были нужны графические функции, и мой компьютер всегда имел гораздо лучшую интеграцию или статистические пакеты. Мне также никогда не нравилась монополия TI на графические калькуляторы, предоставленная образованием. Итак, на прошлой неделе, когда мой последний TI-83 + перевернулся, я начал искать новое настольное устройство, так как теперь у меня остался только мой Pickett N3.
Я «позаимствовал» хорошо подержанный TI-30 с острова несоответствующих игрушек моего отца, и мне он очень, очень нравится по сравнению с моей обычной ценой. Он прост в использовании, мне нравится алюминиевый стиль 70-х годов с квадратными углами, и у каждой кнопки есть одно предназначение. Однако солнечные элементы достаточно стары, чтобы для оптимального использования потребовалось несколько галогенных ламп мощностью 300 Вт (а солнечная энергия — не лучший выбор для ИТ-тролля, живущего под мостом в дальнем углу фермы) и нескольких из них. для регистрации кнопок требуется удар Мьёльнира.
Сейчас я ищу небольшой научный калькулятор, который не полагается исключительно на солнечную энергию и может выполнять шестнадцатеричные или двоичные математические вычисления (и конвертировать между представлениями). Бонусные баллы за стиль слайд-линейки, отсутствие большого графического дисплея или простую настройку. Я неравнодушен к устройствам HP и RPN.
В настоящее время Casio FX-991EX и Sharp EL531X делят первое место. Casio выигрывает (едва ли) по стилю, в то время как Sharp кажется немного проще в использовании, и в нем отсутствует уродливая солнечная панель.Мне не обязательно нужен обзор (хотя, если вы хотите предоставить или связать его, я был бы признателен), но я надеюсь, что вы найдете несколько моделей, которые я мог пропустить при поиске. Искать «шестнадцатеричные калькуляторы» с какой-либо точностью непросто.
Спасибо, и пока всем рыбу …
Конвертер двоичного в десятичный, шестнадцатеричный и ASCII
Конвертер двоичного в десятичный, шестнадцатеричный и ASCII
Нажмите на кнопки двоичных чисел, чтобы переключаться между 0 и 1 для каждый бит:
беззнаковое
двоичное число
(8 бит, один байт)1 0 1 0 0 1 0 0 2 7 2 6 2 5 2 4 2 3 2 2 2 1 2 128 64 32 16 8 4 2 1 десятичное число 0 шестнадцатеричное число 0 ASCII Двоичное число — это число, выраженное в двоичной системе счисления или в системе счисления с основанием 2 .Двоичное число может выражать любое число, используя только две цифры: 0 и 1. Калькулятор выше преобразует двоичные числа с 1 в 8 бит ( один байт ) в десятичные или шестнадцатеричные эквиваленты.
По умолчанию 8-битное (однобайтное) двоичное число 10100100 вычисляется в десятичном эквиваленте:
10100100
= 1 2 7 + 0 2 6 + 1 1 1 1 1 2 5 + 0 2 4 + 0 2 3 + 1 2 2 + 0 2 1 2 0
= 128 + 0 + 32 + 0 + 0 + 4 + 0 + 0
= 164
8 бит или байт могут использоваться для представления ASCII (американский стандартный код для обмена информацией) буквенный символ — например, двоичное число 01000001 или десятичное число 65 , представляющее A.
Преобразователь десятичной системы в двоичный, шестнадцатеричный и ASCII
Стандартная система счисления называется десятичной с основанием 10 и использует 10 символов: 0,1,2,3,4,5,6,7,8,9 .
Шестнадцатеричный преобразователь в двоичный, десятичный и ASCII
Шестнадцатеричный (также с основанием 16 или шестнадцатеричный) — это позиционная система счисления с основанием и основанием 16 .
В шестнадцатеричной системе используется шестнадцать различных символов, из которых 0–9 представляют значения от нуля до девяти, а A, B, C, D, E, F (или a, b, c, d, e, f) представляют значения от десяти до пятнадцати.
Шестнадцатеричное число по умолчанию a4 из калькулятора выше может быть преобразовано в его десятичный эквивалент:
a4
= a 16 16 1 + 4 16 16 0
= 10 16 1 + 4 16 0
= 160 + 4
= 164
Шестнадцатеричное число a4 из приведенного выше калькулятора можно преобразовать в его десятичный эквивалент:
a4b3
= a 16 16 3 + 4 16 16 2 + b 16 16 1 + 3 16 16 0
= 10 16 3 + 4 16 2 + 11 16 1 + 3 16 0= 40960 + 1024 + 176 + 3
= 42163
Шестнадцатеричный vs.Десятичные и двоичные числа
Для полной таблицы — поверните экран!
Шестнадцатеричное число 0 1 2 3 4 5 6 7 8 9 a b c d e f Десятичное число 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Двоичный номер 0000 0001 0010 0011 0100 0101 0110 0111 1000 1001 1010 1011 1100 1101 1110 1111 Каждая шестнадцатеричная цифра представляет четыре двоичных бита — полубайт.Четыре цифровых бита могут представлять до 16 различных значений. Два полубайта по 8 бит — это байт. Компьютеры используют в своих операциях в основном байты или несколько байтов (16, 32, 64 .. бит).
Двоичное представление шестнадцатеричного числа
a4
= 1010 0100
Двоичное представление шестнадцатеричного числа
a4b3
= 1010
в шестнадцатеричном и шестнадцатеричном формате ЧислаДинари
(основание 10)Шестнадцатеричное
(основание 16)Восьмеричное
(основание 8)Двоичное
(основание 2)0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
150
1
2
3
4
5
6
7
8
9
A
B
B
B
B
D
E
F000
001
002
003
004
005
006
007
010
011
012
013
014
015
016
01700000
00000001
00000010
00000011
00000100
00000101
00000110
00000111
00001000
00001001
00001010
00001011
00001100
00001101
00001011
00001100
00001101
00001110 90000
00001111
00009
24
25
26
27
28
29
30
3110
11
12
13
14
15
16
17
18
19
1A
1B
1C
1D
0009020
021
022
023
024
025
026
027
030
031
032
033
034
035
036
03700010000
00010100101 9 0009 00010100101 9 0009 0009 00010110009 000 00011000
00011001
00011010
00011011
00011100
00011101
00011110
0001111132 9000 9 33
34
35
36
37
38
39
40
41
42
43
44
45
46
4720
21
22
23
24
25
26
27
28
28
28
29
2A
2B
2C
2D
2E
2F040
041
042
043
044
045
046
047
050
051
052
053
000 051
052
053
000 09559 00100001
00100010
00100011
00100100
00100101
00100110
00100111
00101000
00101001
00101010
00101011
00101100
00101101
00101190
00101101
00101190
00101101
00101190
57
58
59
60
61
62
6330
31
32
33
34
35
36
37
38
39
3A
3B
3C
3D 9 0009 3E
3F060
061
062
063
064
065
066
067
070
071
072
073
074
075
076
077 1000009 075
076
077 1000009 00110000
000
00110110
00110111
00111000
00111001
00111010
00111011
00111100
00111101
00111110
0011111164
65
66 9000
69000
69000
72
6
77
78
7940 1030064 100
41
42
43
44
45
46
47
48
49
4A
4B
4C
4D
4E
4F
101
102
105
106
107
110
111
112
113
114
115
116
11701000000
01000001
01000010
01000011
0100010 0
01000101
01000110
01000111
01001000
01001001
01001010
01001011
01001100
01001101
01001110
0100111180
8
82
82
92
93
94
9550
51
52
53
54
55
56
57
58
59
5A
5B
5C
5D
5E
5F12022
121000121
124
125
126
127
130
131
132
133
134
135
136
13701010000
01010001
01010010
01010011
01010100
0101010101000
0009 01010101
000
01010100
01010101000 01011100
01011101
01011110
0101111196
97
98
99
100
101
102
103 9 0009104
105
106
107
108
109
110
11160
61
62
63
64
65
66
67
68
69
6A
6B59 6C
6D
6FE140
141
142
143
144
145
146
147
150
151
152
153
154
155
156
15701100000
0110000109 0110009000100
0110000109 0110009000
0110000109 0110009000
01101000
01101001
01101010
01101011
01101100
01101101
01101110
01101111112
113
114
115
116
117
118
11923122122
117
118
1192312270
71
72
73
74
75
76
77
78
79
7A
7B
7C
7D
7E
7F160 9 0009 161
162
163
164
165
166
167
170
171
172
173
174
175
176
17701110000
01110001
01110010
01110010
01110001
01110010
01110009 01110010
01111001
01111010
01111011
01111100
01111101
01111110
01111111128
129
130
131
132
133
134
137
14000132 13
133
134
137
140001 138
80
81
82
83
84
85
86
87
88
89
8A
8B
8C
8D
8E
8F200
201
202
203
204 200006
204 200006 205
211
212
213
214
215
216
21710000000
10000001
10000010
10000011
10000100
10000101 900 09 10000110
10000111
10001000
10001001
10001010
10001011
10001100
10001101
10001110
10001111144
145
146
147
148
149
150009 150009 147
148
149
150009 152 157
158
15990
91
92
93
94
95
96
97
98
99
9A
9B
9C
9D
9E
9F
221
220009 22000
22000 225
226
227
230
231
232
233
234
235
236
23710010000
10010001
10010010
10010011
10010100
10010101
10010111
10010111
10010111
10010111
10011110
10011111160
161
162
163
164
165
166
167 9 0009 168
169
170
171
172
173
174
175A0
A1
A2
A3
A4
A5
A6
A7
A8
A9
AA
AB
AF240
241
242
243
244
245
246
247
250
251
252
253
254
255
256
25710100000
10100001009 100001001011
009 10000100109 10101000
10101001
10101010
10101011
10101100
10101101
10101110
10101111176
177
178
179
180
181
189
189 189 189
189B0
B1
B2
B3
B4
B5
B6
B7
B8
B9
BA
BB
BC
BD
BE
BF260 9 0009 261
262
263
264
265
266
267
270
271
272
273
274
275
276
27710110000
10110001
10110100009 10111011000
1011101100
10110001
10110100009 10111001
10111010
10111011
10111100
10111101
10111110
10111111192
193
194
195
196
197
198
199
200
200009
900
900
200009 C0
C1
C2
C3
C4
C5
C6
C7
C8
C9
CA
CB
CC
CD
CE
CF300
301
302
303 303 304000
303 303 304000
303
311
312
313
314
315
316
31711000000
11000001
11000010
11000011
11000100
11000101 900 09 11000110
11000111
11001000
11001001
11001010
11001011
11001100
11001101
11001110
11001111208
209
210
211
210009 210009 210009 210009 210009 210009 210009 210009 210009 210009 210009 221
222
223D0
D1
D2
D3
D4
D5
D6
D7
D8
D9
DA
DB
DC
DD
DE
DF
DE
DF
325
326
327
330
331
332
333
334
335
336
33711010000
11010001
11010010
11010011
11010100
11010101
11010110110
11010110110
11011110
11011111224
225
226
227
228
229
230
231 9 0009 232
233
234
235
236
237
238
239E0
E1
E2
E3
E4
E5
E6
E7
E8
E9
ED9 E9 9000 E9 EC9 E9 9000 9000 E9340
341
342
343
344
345
346
347
350
351
352
353
354
355
356
35711100000
11100101000009 11100111000009 11100111000009 1110010110009 11101000
11101001
11101010
11101011
11101100
11101101
11101110
11101111240
241
242
243
244
245
249 243
244
245
249 2509 250009 250009 244
249 2509 250009F0
F1
F2
F3
F4
F5
F6
F7
F8
F9
FA
FB
FC
FD
FE
FF360 9 0009 361
362
363
364
365
366
367
370
371
372
373
374
375
376
37711110000
11110001 11111100009 1111100009
111110000
11111001
11111010
11111011
11111100
11111101
11111110
11111111- Denary — Денарная система счисления (десятичная) — это система счисления с основанием 10, используемая людьми с 10 уникальными восьмеричными цифрами от 0 до 934 — восьмеричная система счисления (Oct) — это система счисления с основанием 8, в которой используются цифры от 0 до 7
- Шестнадцатеричная система счисления — шестнадцатеричная система счисления (Hex) — это система счисления с основанием 16, в которой используются цифры 0-9 и буквы A — F
- Двоичная — Двоичная система счисления (Bin) — это система счисления с основанием 2, использующая число 1 и 0
Преобразование двоичного числа в десятичное
Десятичная система счисления имеет основание 10.
Динарное (десятичное) число может быть выражено как
10,5
= 1 x 10 1 + 0 x 10 0 + 5 x 10 -1
В двоичной системе счисления основание системы счисления 2.
Двоичное число может быть выражено как
1011,1
= 1 x 2 3 + 0 x 2 2 + 1 x 2 1 + 1 x 2 0 + 1 x 2 -1
= 8 + 0 + 1 + 1 + 1/2
= 10.5
Различие двоичных и денарных чисел может быть указано как
1011,1 2 = 10,5 10
Преобразование шестнадцатеричных чисел в десятичные
Шестнадцатеричная система счисления имеет основание 16 и использует следующие 16 различные цифры
0, 1, 2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D, E и F
‘A’ соответствует 10 в денарной системе, B до 11, C до 12 …
Шестнадцатеричное число может быть выражено как
1BC
= 1 x 16 2 + C x 16 1 + F x 16 0
= 1 x 16 2 + 12 x 16 1 + 15 x 16 0
= 256 + 192 + 15
= 463
Три новых калькулятора iPhone
The Первоначальный калькулятор iPhone был грустной вещью.Он выполнял основные функции, которые вы найдете в обычном калькуляторе для кредитных карт на 1 доллар. Это было, по крайней мере, по мнению автора, чертовски уродливо.
Затем Стив Джобс встал на сцену и объявил, чудо из чудес, что калькулятор iPhone модернизируется как часть революции программного обеспечения iPhone 2.0! Теперь он был бы более продвинутым, выполняя различные научные функции.
И все же в тот момент я знал, что маленький калькулятор iPhone, как бы он ни старался улучшить себя, вот-вот столкнется с шумной конкуренцией со стороны калькуляторов сторонних производителей.Итак, что мы находим здесь, в первый день существования App Store? Три альтернативы встроенному калькулятору Apple для тех, кто насмехается над калькулятором, который может вычислять квадратные корни и логарифмы, но не может вводить сложные атомные константы или использовать обратную польскую нотацию (RPN).
PCalc
В течение многих лет — а на самом деле их 16 — возможно, лучшим калькулятором на Mac был превосходный PCalc от TLA Systems. Его последняя версия (октябрь 2005 г.) также добавила виджет Dashboard.
А вот и PCalc для iPhone (10 долларов в App Store), который превращает ваш iPhone или iPod touch в самый крутой научный калькулятор на свете. В вертикальной ориентации он выглядит как привлекательный стандартный калькулятор, хотя и с преобразованиями (A- & gt; Кнопка B), константы (42, представляющие окончательный ответ на жизнь, вселенную и все остальное) и многое другое. Но держите устройство горизонтально, и оно превратится в мощный научный калькулятор с режимом RPN, шестнадцатеричным, восьмеричным и двоичным режимами, а также имитацией бумажной ленты для отслеживания вычислений в процессе.
Наиболее впечатляющим является то, что набор текста на клавишах клавиатуры PCalc точно такой же, как набор текста на клавиатуре iPhone, вплоть до анимации при нажатии клавиши. Это непростая задача — все делается с помощью специального кода, написанного программистом PCalc Джеймсом Томсоном.
TouchRPN
TouchRPN Даниэля Штаудигеля — еще один новый калькулятор, ориентированный на RPN, но также предоставляющий встроенные константы, преобразование единиц измерения и функции научного калькулятора. У него красочный набор кнопок, и он стоит 8 долларов в App Store.
RPNCalc
Затем есть RPNCalc Дэвида М. Сыздека, калькулятор RPN за 5 долларов, который заимствует внешний вид калькулятора Apple, но использует его для калькулятора, ориентированного на использование RPN для ваших вычислений.
Оставайтесь с нами на Macworld , где мы рассмотрим все эти приложения, вычислим числа и дадим вам совет о том, какое из них лучше.
Десятичный преобразователь в шестнадцатеричный
Десятичное и шестнадцатеричное (десятичное)
Десятичные дроби — это числа, которые мы используем в повседневной жизни; целые числа, подобные тем, которые используются для подсчета предметов.Десятичное число называется с основанием 10 , потому что оно использует для подсчета 10 различных чисел.
т.е. 0, 1, 2, 3, 4, 5, 6, 7, 8, 9.
Шестнадцатеричные числа, или «шестнадцатеричный», если использовать его полное имя, — это с основанием 16 . Для подсчета используется 16 различных символов.
то есть 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, плюс буквы A, B, C, D, E, F.
Сложив эти числа рядом, мы можем получить представление о том, как преобразовать самые простые десятичные числа в шестнадцатеричные:
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 0 1 2 3 4 5 6 7 8 9 А Б В Г Д Е Ф
Если рассматривать десятичные и шестнадцатеричные числа вместе, как здесь, мы можем легко увидеть, что 10 в десятичном виде это то же самое, что A в шестнадцатеричной системе, а 15 в десятичной системе счисления равно F в шестнадцатеричной системе.
Рекламное объявлениеКак преобразовать десятичное в шестнадцатеричное
- Разделите десятичную дробь на 16, пока результат не станет 15 или меньше.
- Возьмите целое число (до десятичной точки) и найдите соответствующее шестнадцатеричное значение в шестнадцатеричном списке сравнения выше (например, 10 = A, 15 = F).
- Возьмите остаток (после десятичной точки) и умножьте на 16.
- Повторите шаги 2 и 3 с результатом, пока не останетесь без остатка.
Пример преобразования десятичного числа в шестнадцатеричное
Возьмем десятичную 7803 .Сначала мы делим на 16.
Итак, у нас есть итоговые цифры 1-14-7-11.
Снова используя шестнадцатеричный список сравнения выше, 1 и 7 не изменяются, а 14 — это E , а 11 — это B .
Если сложить все вместе, получим 1E7B . Мы можем записать его как 1E7B 16 , чтобы показать, что это шестнадцатеричное число.
Примечание: Если вы хотите преобразовать десятичную дробь в дробь, попробуйте калькулятор десятичной дроби.
Если у вас возникли проблемы с использованием этого калькулятора с десятичного числа в шестнадцатеричный, свяжитесь со мной.
Руководство пользователя калькулятора для Mac
Используйте калькулятор для выполнения базовых, расширенных вычислений или вычислений программиста. Если на вашем Mac есть Touch Bar, вы можете легко выполнять быстрые вычисления, даже не перемещая указатель.
Открыть калькулятор для меня
Совет: Чтобы узнать функцию клавиши, удерживайте указатель над клавишей, чтобы увидеть ее справочный тег.
Преобразовать значения
В приложении «Калькулятор» на Mac введите исходное значение, выберите «Преобразовать» в строке меню, затем выберите категорию, например «Температура» или «Валюта».
Примечание: Вы должны быть подключены к Интернету, чтобы получить самый последний курс конвертации валюты.
Округлить результаты
В приложении «Калькулятор» на Mac выберите «Просмотр»> «Десятичные разряды», затем выберите количество отображаемых десятичных разрядов. Калькулятор сохраняет полное значение и отображает округленное значение. Если отображаемое значение показывает меньше десятичных разрядов, чем вы указали, не отображаемые десятичные разряды являются нулями.
Введите сложные уравнения в обратной польской нотации (RPN)
В приложении «Калькулятор» на Mac выберите «Просмотр»> «Режим RPN».
Стек отображается на дисплее калькулятора, клавиша знака равенства (=) становится клавишей ввода, а четыре клавиши появляются для управления числами в стеке.
Выполните любое из следующих действий:
Поменяйте местами два нижних числа в стеке: Нажмите кнопку «Регистры обмена».
Перемещение последнего введенного числа вверх или вниз по стеку: Нажмите кнопку Roll Up или Roll Down.
Удалите нижний номер из стопки: Нажмите кнопку Drop.
Исправьте неожиданные результаты
В приложении «Калькулятор» на Mac выполните одно из следующих действий:
Повторите вычисление, помня, что Калькулятор использует основной порядок операций для оценки выражений. Например, операции умножения завершаются перед сложением и вычитанием.
Если калькулятор программиста отображает числа в неожиданном формате, измените его на восьмеричный, десятичный или шестнадцатеричный формат: нажмите кнопку 8, 10 или 16, соответственно, под дисплеем калькулятора.Или воспользуйтесь обычным или научным калькулятором.
Если результат не содержит десятичных знаков:
Выберите «Просмотр»> «Базовый» или «Просмотр»> «Научный», поскольку калькулятор программиста обрезает все цифры после десятичной точки. Например, если вы введете 99/10 =, результат будет 9. Используйте базовый или научный калькулятор, чтобы получить более точные результаты.
Выберите «Просмотр»> «Десятичные разряды» (в любом калькуляторе), поскольку количество десятичных разрядов может быть установлено неправильно и калькулятор округляет результат.Например, если десятичные разряды установлены на ноль и вы вводите 99/10 =, результат будет 10.
Если вы не уверены, что правильно ввели расчет, используйте бумажную ленту (выберите «Окно»> «Показать». Paper Tape), чтобы проверить, что вы ввели.
Если вы предпочитаете отображать разделитель запятых, выберите «Просмотр»> «Показать разделители тысяч», чтобы отобразить запятую в больших числах.
Используйте сочетания клавиш
В приложении «Калькулятор» на Mac используйте сочетания клавиш для быстрого ввода расчетов; быстрые клавиши различаются в зависимости от типа используемого калькулятора.
Все типы калькуляторов
Действие
Ярлык
Очистить
Esc
Клавиша C
Очистить все 900
Отменить отображаемое значение
Опция — Знак минус (-)
Процент
Знак процента (%)
Divide
ash Вперед (/)
Умножение
Звездочка (*)
Вычесть
Знак минуса (-)
Добавить
+ Знак плюс (*)
Равно
Знак равенства (=)
Удалить последнюю введенную цифру или букву
Клавиша удаления
Научный калькулятор
Действие
Ярлык
Увеличить отображаемое значение степень следующего введенного значения
Карет (^)
Вычислить натуральный логарифм отображаемого значения
Клавиша E
Вычислить факториал отображаемого значения
Восклицательный знак (!)
Экспоненциальное представление
Shift-E
Режим RPN
Действие
04
04
0 Поменяйте местами два нижних числа на стойке ck
Command-E
Перемещение последнего введенного числа вверх по стеку
Стрелка вверх, команда
Перемещение последнего введенного числа вниз по стеку
Command-стрелка вниз
Удалить нижний номер из стопки
Command-Delete
Чтобы показать текущий список ваших вычислений, выберите Window> Show Paper Tape.
Пятьдесят три тысячи двести: Сумма Прописью Онлайн — сервис быстрого перевода
//1275 — денежная сумма прописью / 1250
1250 прописью:
Одна тысяча двести пятьдесят
1250 прописью на английском: in words 1250 — One thousand two hundred fifty
1250 прописью на испанском: en palabras 1250 — Mil doscientos cincuenta
1250 прописью на немецком: in Worten 1250 — Eintausendzweihundertfünfzig
1250 прописью на французском: par écrit 1250 — Mille-deux-cent-cinquante
1250 прописью на португальском: em palavras 1250 — Mil e duzentos e cinquenta
1250 прописью на итальянском: in lettere 1250 — Milleduecentocinquanta
1250 прописью на украинском: прописом 1250 — Одна тисяча двісті п’ятдесят
Сумма 1250 прописью1251 прописью:
Одна тысяча двести пятьдесят один
1251 прописью на английском: in words 1251 — One thousand two hundred fifty-one
1251 прописью на испанском: en palabras 1251 — Mil doscientos cincuenta y uno
1251 прописью на немецком: in Worten 1251 — Eintausendzweihunderteinundfünfzig
1251 прописью на французском: par écrit 1251 — Mille-deux-cent-cinquante et un
1251 прописью на португальском: em palavras 1251 — Mil e duzentos e cinquenta e um
1251 прописью на итальянском: in lettere 1251 — Milleduecentocinquantuno
1251 прописью на украинском: прописом 1251 — Одна тисяча двісті п’ятдесят один
Сумма 1251 прописью1252 прописью:
Одна тысяча двести пятьдесят два
1252 прописью на английском: in words 1252 — One thousand two hundred fifty-two
1252 прописью на испанском: en palabras 1252 — Mil doscientos cincuenta y dos
1252 прописью на немецком: in Worten 1252 — Eintausendzweihundertzweiundfünfzig
1252 прописью на французском: par écrit 1252 — Mille-deux-cent-cinquante-deux
1252 прописью на португальском: em palavras 1252 — Mil e duzentos e cinquenta e dois
1252 прописью на итальянском: in lettere 1252 — Milleduecentocinquantadue
1252 прописью на украинском: прописом 1252 — Одна тисяча двісті п’ятдесят два
Сумма 1252 прописью1253 прописью:
Одна тысяча двести пятьдесят три
1253 прописью на английском: in words 1253 — One thousand two hundred fifty-three
1253 прописью на испанском: en palabras 1253 — Mil doscientos cincuenta y tres
1253 прописью на немецком: in Worten 1253 — Eintausendzweihundertdreiundfünfzig
1253 прописью на французском: par écrit 1253 — Mille-deux-cent-cinquante-trois
1253 прописью на португальском: em palavras 1253 — Mil e duzentos e cinquenta e três
1253 прописью на итальянском: in lettere 1253 — Milleduecentocinquantatré
1253 прописью на украинском: прописом 1253 — Одна тисяча двісті п’ятдесят три
Сумма 1253 прописью1254 прописью:
Одна тысяча двести пятьдесят четыре
1254 прописью на английском: in words 1254 — One thousand two hundred fifty-four
1254 прописью на испанском: en palabras 1254 — Mil doscientos cincuenta y cuatro
1254 прописью на немецком: in Worten 1254 — Eintausendzweihundertvierundfünfzig
1254 прописью на французском: par écrit 1254 — Mille-deux-cent-cinquante-quatre
1254 прописью на португальском: em palavras 1254 — Mil e duzentos e cinquenta e quatro
1254 прописью на итальянском: in lettere 1254 — Milleduecentocinquantaquattro
1254 прописью на украинском: прописом 1254 — Одна тисяча двісті п’ятдесят чотири
Сумма 1254 прописью1255 прописью:
Одна тысяча двести пятьдесят пять
1255 прописью на английском: in words 1255 — One thousand two hundred fifty-five
1255 прописью на испанском: en palabras 1255 — Mil doscientos cincuenta y cinco
1255 прописью на немецком: in Worten 1255 — Eintausendzweihundertfünfundfünfzig
1255 прописью на французском: par écrit 1255 — Mille-deux-cent-cinquante-cinq
1255 прописью на португальском: em palavras 1255 — Mil e duzentos e cinquenta e cinco
1255 прописью на итальянском: in lettere 1255 — Milleduecentocinquantacinque
1255 прописью на украинском: прописом 1255 — Одна тисяча двісті п’ятдесят п’ять
Сумма 1255 прописью1256 прописью:
Одна тысяча двести пятьдесят шесть
1256 прописью на английском: in words 1256 — One thousand two hundred fifty-six
1256 прописью на испанском: en palabras 1256 — Mil doscientos cincuenta y seis
1256 прописью на немецком: in Worten 1256 — Eintausendzweihundertsechsundfünfzig
1256 прописью на французском: par écrit 1256 — Mille-deux-cent-cinquante-six
1256 прописью на португальском: em palavras 1256 — Mil e duzentos e cinquenta e seis
1256 прописью на итальянском: in lettere 1256 — Milleduecentocinquantasei
1256 прописью на украинском: прописом 1256 — Одна тисяча двісті п’ятдесят шість
Сумма 1256 прописью1257 прописью:
Одна тысяча двести пятьдесят семь
1257 прописью на английском: in words 1257 — One thousand two hundred fifty-seven
1257 прописью на испанском: en palabras 1257 — Mil doscientos cincuenta y siete
1257 прописью на немецком: in Worten 1257 — Eintausendzweihundertsiebenundfünfzig
1257 прописью на французском: par écrit 1257 — Mille-deux-cent-cinquante-sept
1257 прописью на португальском: em palavras 1257 — Mil e duzentos e cinquenta e sete
1257 прописью на итальянском: in lettere 1257 — Milleduecentocinquantasette
1257 прописью на украинском: прописом 1257 — Одна тисяча двісті п’ятдесят сім
Сумма 1257 прописью1258 прописью:
Одна тысяча двести пятьдесят восемь
1258 прописью на английском: in words 1258 — One thousand two hundred fifty-eight
1258 прописью на испанском: en palabras 1258 — Mil doscientos cincuenta y ocho
1258 прописью на немецком: in Worten 1258 — Eintausendzweihundertachtundfünfzig
1258 прописью на французском: par écrit 1258 — Mille-deux-cent-cinquante-huit
1258 прописью на португальском: em palavras 1258 — Mil e duzentos e cinquenta e oito
1258 прописью на итальянском: in lettere 1258 — Milleduecentocinquantotto
1258 прописью на украинском: прописом 1258 — Одна тисяча двісті п’ятдесят вісім
Сумма 1258 прописью1259 прописью:
Одна тысяча двести пятьдесят девять
1259 прописью на английском: in words 1259 — One thousand two hundred fifty-nine
1259 прописью на испанском: en palabras 1259 — Mil doscientos cincuenta y nueve
1259 прописью на немецком: in Worten 1259 — Eintausendzweihundertneunundfünfzig
1259 прописью на французском: par écrit 1259 — Mille-deux-cent-cinquante-neuf
1259 прописью на португальском: em palavras 1259 — Mil e duzentos e cinquenta e nove
1259 прописью на итальянском: in lettere 1259 — Milleduecentocinquantanove
1259 прописью на украинском: прописом 1259 — Одна тисяча двісті п’ятдесят дев’ять
Сумма 1259 прописью1260 прописью:
Одна тысяча двести шестьдесят
1260 прописью на английском: in words 1260 — One thousand two hundred sixty
1260 прописью на испанском: en palabras 1260 — Mil doscientos sesenta
1260 прописью на немецком: in Worten 1260 — Eintausendzweihundertsechzig
1260 прописью на французском: par écrit 1260 — Mille-deux-cent-soixante
1260 прописью на португальском: em palavras 1260 — Mil e duzentos e sessenta
1260 прописью на итальянском: in lettere 1260 — Milleduecentosessanta
1260 прописью на украинском: прописом 1260 — Одна тисяча двісті шістдесят
Сумма 1260 прописью1261 прописью:
Одна тысяча двести шестьдесят один
1261 прописью на английском: in words 1261 — One thousand two hundred sixty-one
1261 прописью на испанском: en palabras 1261 — Mil doscientos sesenta y uno
1261 прописью на немецком: in Worten 1261 — Eintausendzweihunderteinundsechzig
1261 прописью на французском: par écrit 1261 — Mille-deux-cent-soixante et un
1261 прописью на португальском: em palavras 1261 — Mil e duzentos e sessenta e um
1261 прописью на итальянском: in lettere 1261 — Milleduecentosessantuno
1261 прописью на украинском: прописом 1261 — Одна тисяча двісті шістдесят один
Сумма 1261 прописью1262 прописью:
Одна тысяча двести шестьдесят два
1262 прописью на английском: in words 1262 — One thousand two hundred sixty-two
1262 прописью на испанском: en palabras 1262 — Mil doscientos sesenta y dos
1262 прописью на немецком: in Worten 1262 — Eintausendzweihundertzweiundsechzig
1262 прописью на французском: par écrit 1262 — Mille-deux-cent-soixante-deux
1262 прописью на португальском: em palavras 1262 — Mil e duzentos e sessenta e dois
1262 прописью на итальянском: in lettere 1262 — Milleduecentosessantadue
1262 прописью на украинском: прописом 1262 — Одна тисяча двісті шістдесят два
Сумма 1262 прописью1263 прописью:
Одна тысяча двести шестьдесят три
1263 прописью на английском: in words 1263 — One thousand two hundred sixty-three
1263 прописью на испанском: en palabras 1263 — Mil doscientos sesenta y tres
1263 прописью на немецком: in Worten 1263 — Eintausendzweihundertdreiundsechzig
1263 прописью на французском: par écrit 1263 — Mille-deux-cent-soixante-trois
1263 прописью на португальском: em palavras 1263 — Mil e duzentos e sessenta e três
1263 прописью на итальянском: in lettere 1263 — Milleduecentosessantatré
1263 прописью на украинском: прописом 1263 — Одна тисяча двісті шістдесят три
Сумма 1263 прописью1264 прописью:
Одна тысяча двести шестьдесят четыре
1264 прописью на английском: in words 1264 — One thousand two hundred sixty-four
1264 прописью на испанском: en palabras 1264 — Mil doscientos sesenta y cuatro
1264 прописью на немецком: in Worten 1264 — Eintausendzweihundertvierundsechzig
1264 прописью на французском: par écrit 1264 — Mille-deux-cent-soixante-quatre
1264 прописью на португальском: em palavras 1264 — Mil e duzentos e sessenta e quatro
1264 прописью на итальянском: in lettere 1264 — Milleduecentosessantaquattro
1264 прописью на украинском: прописом 1264 — Одна тисяча двісті шістдесят чотири
Сумма 1264 прописью1265 прописью:
Одна тысяча двести шестьдесят пять
1265 прописью на английском: in words 1265 — One thousand two hundred sixty-five
1265 прописью на испанском: en palabras 1265 — Mil doscientos sesenta y cinco
1265 прописью на немецком: in Worten 1265 — Eintausendzweihundertfünfundsechzig
1265 прописью на французском: par écrit 1265 — Mille-deux-cent-soixante-cinq
1265 прописью на португальском: em palavras 1265 — Mil e duzentos e sessenta e cinco
1265 прописью на итальянском: in lettere 1265 — Milleduecentosessantacinque
1265 прописью на украинском: прописом 1265 — Одна тисяча двісті шістдесят п’ять
Сумма 1265 прописью1266 прописью:
Одна тысяча двести шестьдесят шесть
1266 прописью на английском: in words 1266 — One thousand two hundred sixty-six
1266 прописью на испанском: en palabras 1266 — Mil doscientos sesenta y seis
1266 прописью на немецком: in Worten 1266 — Eintausendzweihundertsechsundsechzig
1266 прописью на французском: par écrit 1266 — Mille-deux-cent-soixante-six
1266 прописью на португальском: em palavras 1266 — Mil e duzentos e sessenta e seis
1266 прописью на итальянском: in lettere 1266 — Milleduecentosessantasei
1266 прописью на украинском: прописом 1266 — Одна тисяча двісті шістдесят шість
Сумма 1266 прописью1267 прописью:
Одна тысяча двести шестьдесят семь
1267 прописью на английском: in words 1267 — One thousand two hundred sixty-seven
1267 прописью на испанском: en palabras 1267 — Mil doscientos sesenta y siete
1267 прописью на немецком: in Worten 1267 — Eintausendzweihundertsiebenundsechzig
1267 прописью на французском: par écrit 1267 — Mille-deux-cent-soixante-sept
1267 прописью на португальском: em palavras 1267 — Mil e duzentos e sessenta e sete
1267 прописью на итальянском: in lettere 1267 — Milleduecentosessantasette
1267 прописью на украинском: прописом 1267 — Одна тисяча двісті шістдесят сім
Сумма 1267 прописью1268 прописью:
Одна тысяча двести шестьдесят восемь
1268 прописью на английском: in words 1268 — One thousand two hundred sixty-eight
1268 прописью на испанском: en palabras 1268 — Mil doscientos sesenta y ocho
1268 прописью на немецком: in Worten 1268 — Eintausendzweihundertachtundsechzig
1268 прописью на французском: par écrit 1268 — Mille-deux-cent-soixante-huit
1268 прописью на португальском: em palavras 1268 — Mil e duzentos e sessenta e oito
1268 прописью на итальянском: in lettere 1268 — Milleduecentosessantotto
1268 прописью на украинском: прописом 1268 — Одна тисяча двісті шістдесят вісім
Сумма 1268 прописью1269 прописью:
Одна тысяча двести шестьдесят девять
1269 прописью на английском: in words 1269 — One thousand two hundred sixty-nine
1269 прописью на испанском: en palabras 1269 — Mil doscientos sesenta y nueve
1269 прописью на немецком: in Worten 1269 — Eintausendzweihundertneunundsechzig
1269 прописью на французском: par écrit 1269 — Mille-deux-cent-soixante-neuf
1269 прописью на португальском: em palavras 1269 — Mil e duzentos e sessenta e nove
1269 прописью на итальянском: in lettere 1269 — Milleduecentosessantanove
1269 прописью на украинском: прописом 1269 — Одна тисяча двісті шістдесят дев’ять
Сумма 1269 прописью1270 прописью:
Одна тысяча двести семьдесят
1270 прописью на английском: in words 1270 — One thousand two hundred seventy
1270 прописью на испанском: en palabras 1270 — Mil doscientos setenta
1270 прописью на немецком: in Worten 1270 — Eintausendzweihundertsiebzig
1270 прописью на французском: par écrit 1270 — Mille-deux-cent-soixante-dix
1270 прописью на португальском: em palavras 1270 — Mil e duzentos e setenta
1270 прописью на итальянском: in lettere 1270 — Milleduecentosettanta
1270 прописью на украинском: прописом 1270 — Одна тисяча двісті сімдесят
Сумма 1270 прописью1271 прописью:
Одна тысяча двести семьдесят один
1271 прописью на английском: in words 1271 — One thousand two hundred seventy-one
1271 прописью на испанском: en palabras 1271 — Mil doscientos setenta y uno
1271 прописью на немецком: in Worten 1271 — Eintausendzweihunderteinundsiebzig
1271 прописью на французском: par écrit 1271 — Mille-deux-cent-soixante et onze
1271 прописью на португальском: em palavras 1271 — Mil e duzentos e setenta e um
1271 прописью на итальянском: in lettere 1271 — Milleduecentosettantuno
1271 прописью на украинском: прописом 1271 — Одна тисяча двісті сімдесят один
Сумма 1271 прописью1272 прописью:
Одна тысяча двести семьдесят два
1272 прописью на английском: in words 1272 — One thousand two hundred seventy-two
1272 прописью на испанском: en palabras 1272 — Mil doscientos setenta y dos
1272 прописью на немецком: in Worten 1272 — Eintausendzweihundertzweiundsiebzig
1272 прописью на французском: par écrit 1272 — Mille-deux-cent-soixante-douze
1272 прописью на португальском: em palavras 1272 — Mil e duzentos e setenta e dois
1272 прописью на итальянском: in lettere 1272 — Milleduecentosettantadue
1272 прописью на украинском: прописом 1272 — Одна тисяча двісті сімдесят два
Сумма 1272 прописью1273 прописью:
Одна тысяча двести семьдесят три
1273 прописью на английском: in words 1273 — One thousand two hundred seventy-three
1273 прописью на испанском: en palabras 1273 — Mil doscientos setenta y tres
1273 прописью на немецком: in Worten 1273 — Eintausendzweihundertdreiundsiebzig
1273 прописью на французском: par écrit 1273 — Mille-deux-cent-soixante-treize
1273 прописью на португальском: em palavras 1273 — Mil e duzentos e setenta e três
1273 прописью на итальянском: in lettere 1273 — Milleduecentosettantatré
1273 прописью на украинском: прописом 1273 — Одна тисяча двісті сімдесят три
Сумма 1273 прописью1274 прописью:
Одна тысяча двести семьдесят четыре
1274 прописью на английском: in words 1274 — One thousand two hundred seventy-four
1274 прописью на испанском: en palabras 1274 — Mil doscientos setenta y cuatro
1274 прописью на немецком: in Worten 1274 — Eintausendzweihundertvierundsiebzig
1274 прописью на французском: par écrit 1274 — Mille-deux-cent-soixante-quatorze
1274 прописью на португальском: em palavras 1274 — Mil e duzentos e setenta e quatro
1274 прописью на итальянском: in lettere 1274 — Milleduecentosettantaquattro
1274 прописью на украинском: прописом 1274 — Одна тисяча двісті сімдесят чотири
Сумма 1274 прописью1275 прописью:
Одна тысяча двести семьдесят пять
1275 прописью на английском: in words 1275 — One thousand two hundred seventy-five
1275 прописью на испанском: en palabras 1275 — Mil doscientos setenta y cinco
1275 прописью на немецком: in Worten 1275 — Eintausendzweihundertfünfundsiebzig
1275 прописью на французском: par écrit 1275 — Mille-deux-cent-soixante-quinze
1275 прописью на португальском: em palavras 1275 — Mil e duzentos e setenta e cinco
1275 прописью на итальянском: in lettere 1275 — Milleduecentosettantacinque
1275 прописью на украинском: прописом 1275 — Одна тисяча двісті сімдесят п’ять
1276 прописью:
Одна тысяча двести семьдесят шесть
1276 прописью на английском: in words 1276 — One thousand two hundred seventy-six
1276 прописью на испанском: en palabras 1276 — Mil doscientos setenta y seis
1276 прописью на немецком: in Worten 1276 — Eintausendzweihundertsechsundsiebzig
1276 прописью на французском: par écrit 1276 — Mille-deux-cent-soixante-seize
1276 прописью на португальском: em palavras 1276 — Mil e duzentos e setenta e seis
1276 прописью на итальянском: in lettere 1276 — Milleduecentosettantasei
1276 прописью на украинском: прописом 1276 — Одна тисяча двісті сімдесят шість
Сумма 1276 прописью1277 прописью:
Одна тысяча двести семьдесят семь
1277 прописью на английском: in words 1277 — One thousand two hundred seventy-seven
1277 прописью на испанском: en palabras 1277 — Mil doscientos setenta y siete
1277 прописью на немецком: in Worten 1277 — Eintausendzweihundertsiebenundsiebzig
1277 прописью на французском: par écrit 1277 — Mille-deux-cent-soixante-dix-sept
1277 прописью на португальском: em palavras 1277 — Mil e duzentos e setenta e sete
1277 прописью на итальянском: in lettere 1277 — Milleduecentosettantasette
1277 прописью на украинском: прописом 1277 — Одна тисяча двісті сімдесят сім
Сумма 1277 прописью1278 прописью:
Одна тысяча двести семьдесят восемь
1278 прописью на английском: in words 1278 — One thousand two hundred seventy-eight
1278 прописью на испанском: en palabras 1278 — Mil doscientos setenta y ocho
1278 прописью на немецком: in Worten 1278 — Eintausendzweihundertachtundsiebzig
1278 прописью на французском: par écrit 1278 — Mille-deux-cent-soixante-dix-huit
1278 прописью на португальском: em palavras 1278 — Mil e duzentos e setenta e oito
1278 прописью на итальянском: in lettere 1278 — Milleduecentosettantotto
1278 прописью на украинском: прописом 1278 — Одна тисяча двісті сімдесят вісім
Сумма 1278 прописью1279 прописью:
Одна тысяча двести семьдесят девять
1279 прописью на английском: in words 1279 — One thousand two hundred seventy-nine
1279 прописью на испанском: en palabras 1279 — Mil doscientos setenta y nueve
1279 прописью на немецком: in Worten 1279 — Eintausendzweihundertneunundsiebzig
1279 прописью на французском: par écrit 1279 — Mille-deux-cent-soixante-dix-neuf
1279 прописью на португальском: em palavras 1279 — Mil e duzentos e setenta e nove
1279 прописью на итальянском: in lettere 1279 — Milleduecentosettantanove
1279 прописью на украинском: прописом 1279 — Одна тисяча двісті сімдесят дев’ять
Сумма 1279 прописью1280 прописью:
Одна тысяча двести восемьдесят
1280 прописью на английском: in words 1280 — One thousand two hundred eighty
1280 прописью на испанском: en palabras 1280 — Mil doscientos ochenta
1280 прописью на немецком: in Worten 1280 — Eintausendzweihundertachtzig
1280 прописью на французском: par écrit 1280 — Mille-deux-cent-quatre-vingts
1280 прописью на португальском: em palavras 1280 — Mil e duzentos e oitenta
1280 прописью на итальянском: in lettere 1280 — Milleduecentottanta
1280 прописью на украинском: прописом 1280 — Одна тисяча двісті вісімдесят
Сумма 1280 прописью1281 прописью:
Одна тысяча двести восемьдесят один
1281 прописью на английском: in words 1281 — One thousand two hundred eighty-one
1281 прописью на испанском: en palabras 1281 — Mil doscientos ochenta y uno
1281 прописью на немецком: in Worten 1281 — Eintausendzweihunderteinundachtzig
1281 прописью на французском: par écrit 1281 — Mille-deux-cent-quatre-vingt-un
1281 прописью на португальском: em palavras 1281 — Mil e duzentos e oitenta e um
1281 прописью на итальянском: in lettere 1281 — Milleduecentottantuno
1281 прописью на украинском: прописом 1281 — Одна тисяча двісті вісімдесят один
Сумма 1281 прописью1282 прописью:
Одна тысяча двести восемьдесят два
1282 прописью на английском: in words 1282 — One thousand two hundred eighty-two
1282 прописью на испанском: en palabras 1282 — Mil doscientos ochenta y dos
1282 прописью на немецком: in Worten 1282 — Eintausendzweihundertzweiundachtzig
1282 прописью на французском: par écrit 1282 — Mille-deux-cent-quatre-vingt-deux
1282 прописью на португальском: em palavras 1282 — Mil e duzentos e oitenta e dois
1282 прописью на итальянском: in lettere 1282 — Milleduecentottantadue
1282 прописью на украинском: прописом 1282 — Одна тисяча двісті вісімдесят два
Сумма 1282 прописью1283 прописью:
Одна тысяча двести восемьдесят три
1283 прописью на английском: in words 1283 — One thousand two hundred eighty-three
1283 прописью на испанском: en palabras 1283 — Mil doscientos ochenta y tres
1283 прописью на немецком: in Worten 1283 — Eintausendzweihundertdreiundachtzig
1283 прописью на французском: par écrit 1283 — Mille-deux-cent-quatre-vingt-trois
1283 прописью на португальском: em palavras 1283 — Mil e duzentos e oitenta e três
1283 прописью на итальянском: in lettere 1283 — Milleduecentottantatré
1283 прописью на украинском: прописом 1283 — Одна тисяча двісті вісімдесят три
Сумма 1283 прописью1284 прописью:
Одна тысяча двести восемьдесят четыре
1284 прописью на английском: in words 1284 — One thousand two hundred eighty-four
1284 прописью на испанском: en palabras 1284 — Mil doscientos ochenta y cuatro
1284 прописью на немецком: in Worten 1284 — Eintausendzweihundertvierundachtzig
1284 прописью на французском: par écrit 1284 — Mille-deux-cent-quatre-vingt-quatre
1284 прописью на португальском: em palavras 1284 — Mil e duzentos e oitenta e quatro
1284 прописью на итальянском: in lettere 1284 — Milleduecentottantaquattro
1284 прописью на украинском: прописом 1284 — Одна тисяча двісті вісімдесят чотири
Сумма 1284 прописью1285 прописью:
Одна тысяча двести восемьдесят пять
1285 прописью на английском: in words 1285 — One thousand two hundred eighty-five
1285 прописью на испанском: en palabras 1285 — Mil doscientos ochenta y cinco
1285 прописью на немецком: in Worten 1285 — Eintausendzweihundertfünfundachtzig
1285 прописью на французском: par écrit 1285 — Mille-deux-cent-quatre-vingt-cinq
1285 прописью на португальском: em palavras 1285 — Mil e duzentos e oitenta e cinco
1285 прописью на итальянском: in lettere 1285 — Milleduecentottantacinque
1285 прописью на украинском: прописом 1285 — Одна тисяча двісті вісімдесят п’ять
Сумма 1285 прописью1286 прописью:
Одна тысяча двести восемьдесят шесть
1286 прописью на английском: in words 1286 — One thousand two hundred eighty-six
1286 прописью на испанском: en palabras 1286 — Mil doscientos ochenta y seis
1286 прописью на немецком: in Worten 1286 — Eintausendzweihundertsechsundachtzig
1286 прописью на французском: par écrit 1286 — Mille-deux-cent-quatre-vingt-six
1286 прописью на португальском: em palavras 1286 — Mil e duzentos e oitenta e seis
1286 прописью на итальянском: in lettere 1286 — Milleduecentottantasei
1286 прописью на украинском: прописом 1286 — Одна тисяча двісті вісімдесят шість
Сумма 1286 прописью1287 прописью:
Одна тысяча двести восемьдесят семь
1287 прописью на английском: in words 1287 — One thousand two hundred eighty-seven
1287 прописью на испанском: en palabras 1287 — Mil doscientos ochenta y siete
1287 прописью на немецком: in Worten 1287 — Eintausendzweihundertsiebenundachtzig
1287 прописью на французском: par écrit 1287 — Mille-deux-cent-quatre-vingt-sept
1287 прописью на португальском: em palavras 1287 — Mil e duzentos e oitenta e sete
1287 прописью на итальянском: in lettere 1287 — Milleduecentottantasette
1287 прописью на украинском: прописом 1287 — Одна тисяча двісті вісімдесят сім
Сумма 1287 прописью1288 прописью:
Одна тысяча двести восемьдесят восемь
1288 прописью на английском: in words 1288 — One thousand two hundred eighty-eight
1288 прописью на испанском: en palabras 1288 — Mil doscientos ochenta y ocho
1288 прописью на немецком: in Worten 1288 — Eintausendzweihundertachtundachtzig
1288 прописью на французском: par écrit 1288 — Mille-deux-cent-quatre-vingt-huit
1288 прописью на португальском: em palavras 1288 — Mil e duzentos e oitenta e oito
1288 прописью на итальянском: in lettere 1288 — Milleduecentottantotto
1288 прописью на украинском: прописом 1288 — Одна тисяча двісті вісімдесят вісім
Сумма 1288 прописью1289 прописью:
Одна тысяча двести восемьдесят девять
1289 прописью на английском: in words 1289 — One thousand two hundred eighty-nine
1289 прописью на испанском: en palabras 1289 — Mil doscientos ochenta y nueve
1289 прописью на немецком: in Worten 1289 — Eintausendzweihundertneunundachtzig
1289 прописью на французском: par écrit 1289 — Mille-deux-cent-quatre-vingt-neuf
1289 прописью на португальском: em palavras 1289 — Mil e duzentos e oitenta e nove
1289 прописью на итальянском: in lettere 1289 — Milleduecentottantanove
1289 прописью на украинском: прописом 1289 — Одна тисяча двісті вісімдесят дев’ять
Сумма 1289 прописью1290 прописью:
Одна тысяча двести девяносто
1290 прописью на английском: in words 1290 — One thousand two hundred ninety
1290 прописью на испанском: en palabras 1290 — Mil doscientos noventa
1290 прописью на немецком: in Worten 1290 — Eintausendzweihundertneunzig
1290 прописью на французском: par écrit 1290 — Mille-deux-cent-quatre-vingt-dix
1290 прописью на португальском: em palavras 1290 — Mil e duzentos e noventa
1290 прописью на итальянском: in lettere 1290 — Milleduecentonovanta
1290 прописью на украинском: прописом 1290 — Одна тисяча двісті дев’яносто
Сумма 1290 прописью1291 прописью:
Одна тысяча двести девяносто один
1291 прописью на английском: in words 1291 — One thousand two hundred ninety-one
1291 прописью на испанском: en palabras 1291 — Mil doscientos noventa y uno
1291 прописью на немецком: in Worten 1291 — Eintausendzweihunderteinundneunzig
1291 прописью на французском: par écrit 1291 — Mille-deux-cent-quatre-vingt-onze
1291 прописью на португальском: em palavras 1291 — Mil e duzentos e noventa e um
1291 прописью на итальянском: in lettere 1291 — Milleduecentonovantuno
1291 прописью на украинском: прописом 1291 — Одна тисяча двісті дев’яносто один
Сумма 1291 прописью1292 прописью:
Одна тысяча двести девяносто два
1292 прописью на английском: in words 1292 — One thousand two hundred ninety-two
1292 прописью на испанском: en palabras 1292 — Mil doscientos noventa y dos
1292 прописью на немецком: in Worten 1292 — Eintausendzweihundertzweiundneunzig
1292 прописью на французском: par écrit 1292 — Mille-deux-cent-quatre-vingt-douze
1292 прописью на португальском: em palavras 1292 — Mil e duzentos e noventa e dois
1292 прописью на итальянском: in lettere 1292 — Milleduecentonovantadue
1292 прописью на украинском: прописом 1292 — Одна тисяча двісті дев’яносто два
Сумма 1292 прописью1293 прописью:
Одна тысяча двести девяносто три
1293 прописью на английском: in words 1293 — One thousand two hundred ninety-three
1293 прописью на испанском: en palabras 1293 — Mil doscientos noventa y tres
1293 прописью на немецком: in Worten 1293 — Eintausendzweihundertdreiundneunzig
1293 прописью на французском: par écrit 1293 — Mille-deux-cent-quatre-vingt-treize
1293 прописью на португальском: em palavras 1293 — Mil e duzentos e noventa e três
1293 прописью на итальянском: in lettere 1293 — Milleduecentonovantatré
1293 прописью на украинском: прописом 1293 — Одна тисяча двісті дев’яносто три
Сумма 1293 прописью1294 прописью:
Одна тысяча двести девяносто четыре
1294 прописью на английском: in words 1294 — One thousand two hundred ninety-four
1294 прописью на испанском: en palabras 1294 — Mil doscientos noventa y cuatro
1294 прописью на немецком: in Worten 1294 — Eintausendzweihundertvierundneunzig
1294 прописью на французском: par écrit 1294 — Mille-deux-cent-quatre-vingt-quatorze
1294 прописью на португальском: em palavras 1294 — Mil e duzentos e noventa e quatro
1294 прописью на итальянском: in lettere 1294 — Milleduecentonovantaquattro
1294 прописью на украинском: прописом 1294 — Одна тисяча двісті дев’яносто чотири
Сумма 1294 прописью1295 прописью:
Одна тысяча двести девяносто пять
1295 прописью на английском: in words 1295 — One thousand two hundred ninety-five
1295 прописью на испанском: en palabras 1295 — Mil doscientos noventa y cinco
1295 прописью на немецком: in Worten 1295 — Eintausendzweihundertfünfundneunzig
1295 прописью на французском: par écrit 1295 — Mille-deux-cent-quatre-vingt-quinze
1295 прописью на португальском: em palavras 1295 — Mil e duzentos e noventa e cinco
1295 прописью на итальянском: in lettere 1295 — Milleduecentonovantacinque
1295 прописью на украинском: прописом 1295 — Одна тисяча двісті дев’яносто п’ять
Сумма 1295 прописью1296 прописью:
Одна тысяча двести девяносто шесть
1296 прописью на английском: in words 1296 — One thousand two hundred ninety-six
1296 прописью на испанском: en palabras 1296 — Mil doscientos noventa y seis
1296 прописью на немецком: in Worten 1296 — Eintausendzweihundertsechsundneunzig
1296 прописью на французском: par écrit 1296 — Mille-deux-cent-quatre-vingt-seize
1296 прописью на португальском: em palavras 1296 — Mil e duzentos e noventa e seis
1296 прописью на итальянском: in lettere 1296 — Milleduecentonovantasei
1296 прописью на украинском: прописом 1296 — Одна тисяча двісті дев’яносто шість
Сумма 1296 прописью1297 прописью:
Одна тысяча двести девяносто семь
1297 прописью на английском: in words 1297 — One thousand two hundred ninety-seven
1297 прописью на испанском: en palabras 1297 — Mil doscientos noventa y siete
1297 прописью на немецком: in Worten 1297 — Eintausendzweihundertsiebenundneunzig
1297 прописью на французском: par écrit 1297 — Mille-deux-cent-quatre-vingt-dix-sept
1297 прописью на португальском: em palavras 1297 — Mil e duzentos e noventa e sete
1297 прописью на итальянском: in lettere 1297 — Milleduecentonovantasette
1297 прописью на украинском: прописом 1297 — Одна тисяча двісті дев’яносто сім
Сумма 1297 прописью1298 прописью:
Одна тысяча двести девяносто восемь
1298 прописью на английском: in words 1298 — One thousand two hundred ninety-eight
1298 прописью на испанском: en palabras 1298 — Mil doscientos noventa y ocho
1298 прописью на немецком: in Worten 1298 — Eintausendzweihundertachtundneunzig
1298 прописью на французском: par écrit 1298 — Mille-deux-cent-quatre-vingt-dix-huit
1298 прописью на португальском: em palavras 1298 — Mil e duzentos e noventa e oito
1298 прописью на итальянском: in lettere 1298 — Milleduecentonovantotto
1298 прописью на украинском: прописом 1298 — Одна тисяча двісті дев’яносто вісім
Сумма 1298 прописью1299 прописью:
Одна тысяча двести девяносто девять
1299 прописью на английском: in words 1299 — One thousand two hundred ninety-nine
1299 прописью на испанском: en palabras 1299 — Mil doscientos noventa y nueve
1299 прописью на немецком: in Worten 1299 — Eintausendzweihundertneunundneunzig
1299 прописью на французском: par écrit 1299 — Mille-deux-cent-quatre-vingt-dix-neuf
1299 прописью на португальском: em palavras 1299 — Mil e duzentos e noventa e nove
1299 прописью на итальянском: in lettere 1299 — Milleduecentonovantanove
1299 прописью на украинском: прописом 1299 — Одна тисяча двісті дев’яносто дев’ять
Сумма 1299 прописью200 евро (EUR) в леях (MDL) на сегодня, сколько стоит 200 евро в молдавских леях
200.00 EURЕВРО
=
4 277.76 MDLМОЛДАВСКИЕ ЛЕИ
1 евро = 21.39 лей
Расчет стоимости 200 евро к леям основан на актуальных данных, полученных от Ценробанка России (ЦБ РФ) сегодня 14.07.2021, и составляет 4 277.76 MDL (четыре тысячи двести семьдесят семь леев семьдесят шесть баней).
График отношения 200 евро к леям
Для наилучшего восприятия выше представлен график изменения котировки 200 евро в леях за последний день, неделю, месяц и год. Максимум был достигнут 13.07.2021 и составил 4 279.86 л. (четыре тысячи двести семьдесят девять леев восемьдесят шесть баней), минимум 09.07.2021, когда двести евро можно было купить за 4 253.70 L (четыре тысячи двести пятьдесят три лея семь баней). На нем отображена динамика курса валюты, что дает возможность узнать соотношение валют в конкретный день или период. С помощью него можно сделать приближенные прогнозы стоимости 200 евро в леях на ближайшее время.
Динамика стоимости 200 евро в леях за месяц
Дата День недели 200.00€ Разница с
предыдущим днёмРазница в % 15.06.2021 Вторник 4 322.52 L 0 0% 16.06.2021 Среда 4 296.70 L -25.82 0.6% 17.06.2021 Четверг 4 306.54 L +9.84 +0.23% 18.06.2021 Пятница 4 257.04 L -49.50 1.16% 19.06.2021 Суббота 4 256.76 L -0.28 0.01% 20.06.2021 Воскресенье 4 256.76 L 0 0% 21.06.2021 Понедельник 4 256.76 L 0 0% 22.06.2021 Вторник 4 273.56 L +16.80 +0.39% 23.06.2021 Среда 4 284.32 L +10.76 +0.25% 24.06.2021 Четверг 4 295.88 L +11.56 +0.27% 25.06.2021 Пятница 4 300.54 L +4.66 +0.11% 26.06.2021 Суббота 4 306.64 L +6.10 +0.14% 27.06.2021 Воскресенье 4 306.64 L 0 0% 28.06.2021 Понедельник 4 306.64 L 0 0% 29.06.2021 Вторник 4 294.10 L -12.54 0.29% 30.06.2021 Среда 4 278.42 L -15.68 0.37% 01.07.2021 Четверг 4 287.92 L +9.50 +0.22% 02.07.2021 Пятница 4 275.02 L -12.90 0.3% 03.07.2021 Суббота 4 280.56 L +5.54 +0.13% 04.07.2021 Воскресенье 4 280.56 L 0 0% 05.07.2021 Понедельник 4 280.56 L 0 0% 06.07.2021 Вторник 4 291.20 L +10.64 +0.25% 07.07.2021 Среда 4 286.88 L -4.32 0.1% 08.07.2021 Четверг 4 266.92 L -19.96 0.47% 09.07.2021 Пятница 4 253.70 L -13.22 0.31% 10.07.2021 Суббота 4 278.70 L +25.00 +0.58% 11.07.2021 Воскресенье 4 278.70 L 0 0% 12.07.2021 Понедельник 4 278.70 L 0 0% 13.07.2021 Вторник 4 279.86 L +1.16 +0.03% 14.07.2021 Среда 4 277.76 L -2.10 0.05% По данным Центробанка РФ, в течение прошедшего месяца курс евро в леях вырос на 0.09 L ( девять баней). 30 дней назад курс 200.00 евро к леям был равен 4 322.52 L (четыре тысячи триста двадцать два лея пятьдесят два баня). За последнюю неделю цена обмена 200.00 евро выросла на 9.12 L и составляет на сегодняшний день 4 277.76 MDL (четыре тысячи двести семьдесят семь леев семьдесят шесть баней).
Другие суммы
евро молдавские леи молдавские леи евро 5€ = 106.94 L 5 L = 0.23€ 10€ = 213.89 L 10 L = 0.47€ 20€ = 427.78 L 20 L = 0.94€ 50€ = 1 069.44 L 50 L = 2.34€ 100€ = 2 138.88 L 100 L = 4.68€ 500€ = 10 694.40 L 500 L = 23.38€ Таблица уже готовых конверсий евро в леи содержит часто используемые для перевода суммы денег между парой € L.
Торги
№
Наименование вида муниципального имущества
местонахождение муниципального имущества
техническая характеристика объекта муниципального имущества
Примечание
1
нежилое помещение
Юбилейный пр-т,
д.78, пом.007
29,3 кв. м, подвал
свободно
2
нежилое помещение
ул. Московская,
д.13/1, пом.008
72,8 кв. м, 1 этаж
свободно
3
нежилое помещение
ул. Московская,
д.13/1, пом.007
75,3 кв. м, подвал
свободно
4
нежилое помещение
ул. Московская,
д.13/1, пом.005
184,9 кв. м, подвал
свободно
5
нежилое помещение
ул. Московская,
д.13/1, пом.004
119,1 кв. м, подвал
свободно
6
нежилое помещение
ул. Московская,
д.13/1, пом.003
200,9 кв. м, подвал
свободно
7
нежилое помещение
ул. Аптечная, д.4
лит А, объект №1
часть №15
59,2 кв. м, подвал
свободно
8
нежилое помещение
ул. Нахимова, д.4-А, пом.002
27,6 кв. м, 1 этаж
свободно
9
нежилое помещение
мкр. Подрезково,
ул. Центральная, д.7, пом.003 (этаж подвальный)
514 кв. м, подвал
свободно
10
нежилое помещение
ул. Маяковского, д.20,
пом. 003
351 кв. м, подвал
свободно
11
нежилое помещение
Юбилейный пр-т,
д.40, пом. 011 (этаж подвальный)
410,6 кв. м, подвал
свободно
12
нежилое помещение
Юбилейный пр-т,
д.40, пом. 012 (этаж подвальный)
537,4 кв. м, подвал
свободно
13
нежилое помещение
ул. Кольцевая, д.6,
пом. 003
486,6 кв. м, подвал
свободно
14
нежилое помещение
ул. Кирова, д.9,
пом. 006
12,4 кв. м, подвал
свободно
15
нежилое помещение
ул. Кирова, д.9, пом. 007
12,4 кв. м, подвал
свободно
16
нежилое помещение
ул. Кирова, д.9, пом. 008
12,4 кв. м, подвал
свободно
17
нежилое помещение
ул. Кирова, д.9, пом. 009
18 кв. м, подвал
свободно
18
нежилое помещение
ул. Кирова, д.9, пом. 010 (этаж подвальный)
446,9 кв. м, подвал
свободно
19
нежилое помещение
ул. 9 Мая, д.2, лит А, объект №1, часть № 18
270,7 кв. м, подвал
свободно
20
нежилое помещение
ул. Ленинградская, д.8, пом.007
(этаж подвальный)93,2 кв. м, подвал
свободно
21
нежилое помещение
ул. Ленинградская, д.8, пом.008
(этаж подвальный)306 кв. м, подвал
свободно
22
нежилое помещение
мкр. Сходня, ул. Первомайская, д.17, пом. 002 (этаж подвальный)
496,1 кв. м, подвал
свободно
23
нежилое помещение
Юбилейный пр-т, д.74, пом.003
380,8 кв. м, подвал
свободно
24
нежилое помещение
Юбилейный пр-т, д.74, пом.002
267,1 кв. м, подвал
свободно
25
нежилое помещение
ул. Победы, д.1/13, пом.004
256 кв. м, подвал
свободно
26
нежилое помещение
ул. Ленинградская, д.16, пом. 007
384,3 кв. м, подвал
свободно
27
нежилое помещение
ул. Ленинградская, д.16, пом. 006
829,5 кв. м, подвал
свободно
28
нежилое помещение
ул. Кирова, д.20, пом. 011
88,3 кв. м, подвал
свободно
29
нежилое помещение
ул. Мичурина , д.15, пом. 002
42,8 кв. м, 1 этаж
свободно
Запись целых чисел со словами
Результаты обучения
- Запишите целое число в виде цифр словами
- Запишите целое число прописью цифрами
Используйте значение места для именования целых чисел
Когда вы выписываете чек, вы записываете число как прописью, так и цифрами. Чтобы записать число словами, напишите число в каждой точке, за которым следует название периода без буквы «s» в конце.Начните с цифры слева, которая имеет наибольшее разрядное значение. Точки разделяются запятыми, поэтому, если в числе есть запятая, ставьте запятую между словами. Период единиц, имеющий наименьшее разрядное значение, не называется.
Итак, число [латекс] 37 519 248 [/ латекс] написано тридцать семь миллионов пятьсот девятнадцать тысяч двести сорок восемь.
Обратите внимание, что слова и не используются при именовании целого числа.Назовите целое число прописью
- Начиная с цифры слева, назовите число в каждой точке, после чего укажите название периода.Не включайте название периода для тех.
- Используйте запятые в числах для разделения точек.
пример
Назовите прописью номер [латекс] 8,165,432,098,710 [/ латекс].
Решение
Начните с крайней левой цифры, то есть [латекс] 8 [/ латекс]. Это место в триллионах. восемь триллионов Следующий период справа — миллиарды. сто шестьдесят пять миллиардов Следующий период справа — миллионы. четыреста тридцать два миллиона Следующая точка справа — тысячи. девяносто восемь тысяч Крайняя правая точка показывает единицы. семьсот десять
Собрав все слова вместе, мы запишем [латекс] 8,165,432,098,710 [/ латекс] как восемь триллионов сто шестьдесят пять миллиардов четыреста тридцать два миллиона девяносто восемь тысяч семьсот десять.пример
Студент провел исследование и обнаружил, что количество пользователей мобильных телефонов в Соединенных Штатах в течение одного месяца в [латексе] 2014 [/ латексе] составляло [латекс] 327 577 529 [/ латекс].Назовите это число словами.
Показать решение Определите периоды, связанные с номером.Назовите число в каждом периоде, после которого укажите название периода. Разделяйте точки запятыми.
Период миллионов : триста двадцать семь миллионов
Период тысяч : пятьсот семьдесят семь тысяч
Один период : пятьсот двадцать девятьТаким образом, количество пользователей мобильных телефонов в Соединенных Штатах в течение апреля составило триста двадцать семь миллионов пятьсот семьдесят семь тысяч пятьсот двадцать девять.
Используйте разряд для записи целых чисел
Теперь обратимся к процессу и запишем число, данное словами, цифрами.
Используйте разряд для записи целого числа
- Определите слова, обозначающие точки. (Помните, что период единиц никогда не называется.)
- Нарисуйте три пробела, чтобы указать количество мест, необходимых в каждом периоде. Разделите точки запятыми.
- Назовите число в каждой точке и разместите цифры в правильных позициях разряда.
пример
Запишите следующие числа цифрами.
- пятьдесят три миллиона четыреста одна тысяча семьсот сорок два
- девять миллиардов двести сорок шесть миллионов семьдесят три тысячи сто восемьдесят девять
- Определите слова, обозначающие точки.
- За исключением первого периода, во всех остальных периодах должно быть три места.
- Нарисуйте три пробела, чтобы указать количество мест, необходимых в каждом периоде.
- Разделите точки запятыми.
- Затем запишите цифры в каждой точке.
Сложите числа, включая запятые. Номер [латекс] 53 401 742 [/ латекс].2.
- Определите слова, обозначающие точки.
- За исключением первого периода, во всех остальных периодах должно быть три места.
- Нарисуйте три пробела, чтобы указать количество мест, необходимых в каждом периоде.
- Разделите точки запятыми.
- Затем запишите цифры в каждой точке.
Номер [латекс] 9 246 073 189 [/ латекс].Обратите внимание, что в части (2) ноль нужен в качестве заполнителя в разряде сотен тысяч. Обязательно пишите нули по мере необходимости, чтобы убедиться, что каждая точка, кроме, возможно, первой, имеет три знака.
пример
Государственный бюджет составлял около [латексного] \ text {\ 77} [/ латексного] миллиарда. Напишите бюджет в стандартной форме.
Показать решениеОпределите периоды. В этом случае даны только две цифры, и они находятся в периоде в миллиарды. Чтобы записать все число, напишите нули для всех остальных точек.
Итак, бюджет был примерно [латекс] \ text {\ 77 000 000 000 долларов.} [/ Latex]попробуйте
Напишите каждое число в стандартной форме:
- Ближайшее расстояние от Земли до Марса составляет [латекс] 34 [/ латекс] миллиона миль.
- Общий вес авианосца составляет [латекс] 204 [/ латекс] миллиона фунтов.
- [латекс] 34 000 000 [/ латекс] миль
- [латекс] 204 000 000 [/ латекс] фунтов
На видео ниже показано больше примеров того, как использовать разряд для написания имени целого числа.
Закон о сессии — Акты 2011 г. Глава 121
Будет ли это принято Сенатом и Палатой представителей в Общем суде, собравшимися, и уполномоченным на то, как указано ниже:
РАЗДЕЛ 1. В раздел 1 главы 80 законов 1929 года настоящим вносятся поправки, вычеркивая второй параграф, как он фигурирует в разделе 1 главы 341 законов 2004 года, и вставляя вместо него следующий параграф: —
Начиная с точки А на широте шестьсот пятьдесят один семьдесят одна сотая фута северной широты и восемьсот шестьдесят семь сотых футов западной долготы, указанная точка А находится на пятьдесят два градуса северной широты пятьдесят одна минута двадцать пять минут. пять секунд на запад, истинный азимут, одна тысяча семьдесят девять тридцать три сотых фута от вышеописанной отметки 1; отсюда на север, один градус, пятьдесят минут, семь секунд на запад, истинный пеленг, тысяча восемьсот двадцать футов до точки B по широте, две тысячи четыреста семьдесят семьдесят семь сотых футов северной широты и долгота девятьсот восемнадцать шестьдесят пять в сотых футах к западу, указанная точка B расположена на севере в двадцати двух градусах, тридцать четыре минуты тридцать секунд на запад, истинный пеленг, в шестисот пятидесяти одной сотой фута от отметки 2 на юго-западном углу пристани Atlas Tack Company в Фэрхейвене; отсюда к северу тридцать шесть градусов, сорок четыре минуты девятнадцать секунд к западу, истинный пеленг, одна тысяча четыреста сорок четыре и девяносто три сотых фута до точки C1, на широте три тысячи шестьсот двадцать восемь и семь десятых футов северной широты и долготы одна тысяча семьсот восемьдесят два и девяносто шесть сотых футов к западу, указанная точка C1 находится в сорока девяти градусах северной широты пятьдесят четыре минуты двенадцать секунд на запад, истинный пеленг, триста семьдесят два одиннадцать в сотых футах от отметки 3 на северо-западном углу Центральной пристани в Фэрхейвене; отсюда на север четыре градуса, девятнадцать минут, две секунды на запад, истинный азимут, вдоль западной стороны разрушенной сваи пирса Rodman Candle Works LLC, как показано на описанном ниже плане, шестьсот шестьдесят семь девяносто одна сотая фута до точки D1. по широте четыре тысячи триста три тридцать девять сотых футов северной широты и одна тысяча восемьсот тридцать три и двадцать четыре сотых фута к западу; отсюда к северу семьдесят восемь градусов, тридцать две минуты 45 секунд на восток, истинный азимут, шестьдесят одна шесть сотых футов до точки D2, по широте четыре тысячи триста пятнадцать и пятьдесят две сотых фута северной широты и по долготе одна тысяча семьсот. семьдесят три и тридцать девять сотых футов к западу; отсюда на север тридцать шесть градусов, тридцать минут, тридцать секунд на восток, истинный пеленг, пятьсот шестьдесят три и тридцать одна сотая фута до точки E по широте четыре тысячи семьсот шестьдесят восемь и двадцать девять сотых футов северной широты и долготы одна тысяча четыреста тридцать восемь двадцать шесть сотых футов к западу, указанная точка E расположена к северу в семидесяти пяти градусах сорок одной минуте и сорока шести секундах на запад, истинный пеленг, триста шестьдесят восемь шестьдесят один в сотых футах от каменного монумента на юго-восточном углу Вашингтон-стрит и Уотер-стрит в Фэрхейвене; отсюда к северу, двенадцать градусов, десять минут, пятьдесят семь секунд на запад, истинный азимут, двести семьдесят пять футов до точки «Эль», пять тысяч тридцать семь и одна десятая фута северной широты и одна тысяча четыреста девяносто долготы. шесть двадцать девять сотых футов к западу; отсюда к югу семьдесят девять градусов, тридцать четыре минуты пятнадцать секунд на запад, истинный пеленг, двести семьдесят пять и тринадцать сотых футов до точки «E2» на широте четыре тысячи девятьсот восемьдесят семь двадцать девять сотых футов север и одна тысяча семьсот шестьдесят шесть и восемьдесят восемь сотых футов к западу; отсюда на север двенадцать градусов, десять минут пятьдесят семь секунд на запад, истинный пеленг, семьсот двадцать четыре двадцать шесть сотых футов до точки «E4» на широте пять тысяч шестьсот девяносто пять двадцать четыре сотых. футов на север и одна тысяча девятьсот девятнадцать семьдесят одна сотая фута на запад; оттуда на юг шестьдесят четыре градуса, двадцать четыре минуты, сорок секунд на запад, истинный пеленг, одна тысяча пятьсот четырнадцать двадцать три сотых фута до точки «PG1» на широте пять тысяч сорок одна и десять сотых футов северной широты. и долгота три тысячи двести восемьдесят пять и шестьдесят девять сотых футов к западу; оттуда на север восемьдесят один градус, двадцать одна минута, семь секунд на запад, истинный азимут, четыреста тридцать две пятьдесят две сотых фута до точки «PG2» на широте пять тысяч сто шесть тринадцать сотых фута северной широты. и долгота три тысячи семьсот тринадцать двадцать девять сотых футов к западу; отсюда на север тридцать девять градусов девятнадцать минут одна секунда на запад, истинный пеленг, шестьсот две девяносто семь сотых футов до точки «PE2» на широте пять тысяч пятьсот семьдесят два и шестьдесят две сотых фута северной широты и долгота четыре тысячи девяносто пять тридцать четыре сотых фута к западу; оттуда двадцать четыре градуса, пятьдесят шесть минут двенадцать секунд на запад, истинный пеленг, двести девяносто шесть семьдесят шесть сотых футов до точки «PE1» по широте пять тысяч восемьсот сорок один семьдесят один. одна сотая фута к северу и четыре тысячи двести двадцать сорок шесть сотых футов западной долготы; отсюда к северу семнадцать градусов, одиннадцать минут, двадцать три секунды к западу, истинный азимут, четыреста три семьдесят одна сотая фута до точки «PE4» в широте шесть тысяч двести двадцать семь и тридцать восемь сотых футов северной широты и долготы. четыре тысячи триста тридцать девять семьдесят семь сотых футов к западу; отсюда на север пятнадцать градусов тридцать четыре минуты восемь секунд на восток, истинный азимут, одна тысяча двадцать две тридцать одна сотая фута до точки «PD1» на широте семь тысяч двести двенадцать и семнадцать сотых футов северной широты и четыре тысячи шестьдесят долготы. -пять тридцать девять сотых футов к западу; отсюда на север восемьдесят три градуса, сорок три минуты, девятнадцать секунд восточной долготы, истинный азимут, пятьсот восемьдесят восемьдесят шесть сотых футов до точки «PC» на широте семь тысяч двести семьдесят пять шестьдесят девять сотых. футов на север и долгота три тысячи четыреста восемьдесят восемь и одна сотая фута к западу, указанная точка «PC» находится на севере, сорок градусов, двадцать пять минут, пять секунд восточной долготы, истинный пеленг, девятьсот две тридцать пять сотых фута. из вышеупомянутой «Марка 20»; отсюда к югу сорок шесть градусов, шестнадцать минут сорок одна секунда восточной долготы, истинный азимут, тысяча четыреста тридцать четыре и шестьдесят шесть сотых футов до точки «PB» на широте шесть тысяч двести восемьдесят четыре и одиннадцать первой широты. сотых футов на север и две тысячи четыреста пятьдесят один и восемнадцать сотых футов на запад; указанная точка «PB» расположена на севере, четырнадцать градусов, пятьдесят одна минута, пятьдесят пять секунд на запад, истинный пеленг, в семидесяти и четырех десятых футах от «Марка 19» на южной стороне моста Нью-Бедфорд и Фэрхейвен возле восточного конца острова Пап; отсюда на север семьдесят три градуса, двадцать три минуты, девятнадцать секунд восточной долготы, истинный азимут, триста девяносто шесть и сорок две сотых фута до точки «F2» на широте шесть тысяч триста девяносто семь и сорок три. футов на север и две тысячи семьдесят один и тридцать одну сотую фута на запад; отсюда на север, двенадцать градусов, десять минут, пятьдесят семь секунд на запад, истинный пеленг, триста девяносто девять и девять сотых футов до точки «Fl» шесть тысяч семьсот восемьдесят семь и пятьдесят четыре сотых фута северной широты и долгота две тысячи сто пятьдесят пять пятьдесят три сотых фута к западу; отсюда на север сорок шесть градусов, шестнадцать минут, сорок одна секунда на запад, истинный пеленг, две тысячи девятьсот пятнадцать и восемь десятых футов до точки G по широте восемь тысяч восемьсот два восемьдесят две сотых фута северной широты и четыре тысячи долготы. двести шестьдесят два и семьдесят восемь сотых футов к западу, указанная точка G расположена к югу в двенадцати градусах, двадцати минутах и сорока одной секунде к западу, истинный пеленг, одна тысяча пять сотых футов от отметки 6 на Маршом острове, поэтому- позвонил в Фэйрхейвен; оттуда на север, десять градусов, двадцать три минуты, пятьдесят три секунды на запад, истинный пеленг, одна тысяча двести шестнадцать девяносто две сотых фута до точки H на широте девять тысяч девятьсот девяносто девять семьдесят шесть сотых. футов на север и долгота четыре тысячи четыреста восемьдесят две и сорок две сотых фута к западу, указанная точка H расположена на севере шестьдесят три градуса, пять минут шестнадцать секунд на запад, истинный пеленг, четыреста восемьдесят шесть восемь сотых. футах от Марка 6 на Марш-Айленде в Фэрхейвене; оттуда на север, двадцать четыре градуса восточной долготы, истинный пеленг, тысяча восемьсот футов до точки I, одиннадцать тысяч шестьсот сорок четыре и четырнадцать сотых футов северной широты и три тысячи семьсот пятьдесят двадцать девять сотых футов западной долготы, указанная точка Я был расположен к югу, четырнадцать градусов, семь минут, двадцать девять секунд к западу, истинный азимут, девять и девяносто восемь сотых футов от Марка 7 на южной стороне моста Коггесхолл-стрит около конца Фэрхейвен; отсюда на север, два градуса, четыре минуты, тридцать девять секунд на восток, истинный пеленг, две тысячи семьдесят семь двадцать восемь сотых футов до точки J тринадцать тысяч семьсот двадцать пять сотых футов северной широты и три тысячи шесть долготы. сто семьдесят четыре девяносто девять сотых футов к западу, указанная точка J расположена к северу в пятидесяти четырех градусах тридцать девять минут семнадцать секунд на запад, истинный пеленг, восемьсот шестьдесят четыре двадцать восемь сотых футов от Марка. 8 возле западного конца улицы Веранда в Фэрхейвене; отсюда к северу, одиннадцать градусов, тридцать две минуты, двадцать секунд к западу, истинный пеленг, две тысячи восемьсот двадцать пять и двадцать две сотые фута до точки K на широте шестнадцать тысяч четыреста восемьдесят восемь и семнадцать сотых футов северной широты и долгота четыре тысячи двести сорок тринадцать сотых футов к западу, указанная точка K расположена к северу в семидесяти градусах, тридцать шесть минут, двадцать две секунды к западу, истинный пеленг, пятьсот девяносто два и тридцать три сотых фута от Марка. 9, где вышеописанная точка K является северным концом гавани, установленной на восточном берегу реки Акушнет.
РАЗДЕЛ 2. Границы и границы, указанные в разделе 1, представляют собой перемещение линий гавани, охватывающих остров Поупс в гаванях Фэрхейвен и Нью-Бедфорд, между точками линии гавани «C1» и «E», как показано на плане от 12 августа. , 2010 г., ПОСЛЕДНЕЕ ПЕРЕСМОТР 28 декабря 2010 г., составленный CLE Engineering, Inc., 15 Creek Road, Marion, MA 02738, должен быть подан в управление водных путей в рамках департамента сохранения и отдыха, подразделение водно-болотных угодий и водных путей в пределах отдела охраны окружающей среды и с инженером города Нью-Бедфорд.
РАЗДЕЛ 3. Настоящий акт вступает в силу с момента его принятия.
Утверждено 23 сентября 2011 г.
2005 Вс. ПОКАЗАТЕЛИ ДЕЯТЕЛЬНОСТИ ЗА 2006 ГОД АВТОБУС НАСАДКА: День недели: 2005 год: девятьсот шестьдесят девять тысяч двести сорок пять. 2006: девятьсот пятьдесят шесть тысяч девятьсот девяносто за уменьшение на минус одна целая целая три десятых процента. Суббота: 2005 год: шестьсот тринадцать тысяч двести девяносто девять.2006: Шестьсот четыре тысячи двести пятьдесят три с уменьшением на минус одна целая пять десятых процента. Воскресенье: 2005 год: четыреста семнадцать тысяч сто пятьдесят девять. 2006: Четыреста пять тысяч семьсот шесть с уменьшением на минус две целых семь десятых процента. Итого: 2005 г .: триста три миллиона двести сорок четыре тысячи один сто девяносто семь. 2006: двести девяносто восемь миллионов четыреста тридцать три тысячи двести двадцать восемь с уменьшением на минус один целых шесть десятых процента.Пассажирских миль: 2005: семьсот восемьдесят один миллион девятьсот семьдесят семь тысяч семьсот пятьдесят четыре. 2006: семьсот шестьдесят девять миллионов пятьсот семьдесят четыре тысячи девятьсот четырнадцать за снижение на минус одну целую целую шесть десятых процента. ВОВРЕМЯ: Процент вылета из терминала, минус 1, плюс 5: 2005: семьдесят шесть баллов восемь процентов. 2006 год: восемьдесят целых шесть десятых процента при росте на четыре целых девять десятых процента. процентов.Средние мили между отказами: 2005: три тысячи девятьсот девяносто- пять. 2006 год: четыре тысячи восемьсот шестьдесят семь, что на двадцать пять больше. одна целая восемь десятых процента. ЧИСТЫЙ: Процент автобусов, очищенных и подметаемых до утра Обслуживание: Выполняется ежедневно как за 2005, так и за 2006 год, без процентных изменений. Среднее количество дней между стирками наружных поверхностей: ежедневно в 2005 и 2006 гг. без процентного изменения. Количество дней между крупными чистками: 2005: тридцать один.2006: восемнадцать за уменьшение на минус сорок одна целая девять целых девять десятых процента. Количество жалоб на чистоту: 2005 г .: Двадцать восемь. 2006: шестьдесят четыре за увеличение на сто двадцать восемь целых шесть десятых процента. Процент граффити, удаленных через 24 часа после подачи жалобы: выполнено ежедневно как в 2005, так и в 2006 году, без процентных изменений. БЕЗОПАСНЫЙ: Жалобы на безопасность: 2005: Девяносто три. 2006: Сто тридцать за увеличение на тридцать девять целых восемь десятых процента.Число инцидентов, связанных с безопасностью NTD, на 1 миллион миль: 2005: семь целых девяноста. 2006: ноль целых тридцать семь целых единиц при уменьшении на минус девяносто пять целых три десятых. процентов. Количество аварий на сто тысяч миль: 2005: шесть целых тридцать десятых. 2006 год: шесть целых одиннадцать десятых пункта при росте на три процента. Число инцидентов, связанных с безопасностью NTD, на 1 миллион миль, несущественных: 2005 г .: семь пункт семьдесят шестой. 2006 год: одна целая восемьдесят пять десятых, то есть на минус семьдесят шесть меньше. целых два десятых процента.Число инцидентов, связанных с безопасностью NTD, на 1 миллион миль, крупные: 2005 г .: один балл шестьдесят три. 2006: ноль целых пятьдесят десятых при снижении на минус шестьдесят девять целых три целых. процентов. ДРУЖЕЛЮБНО: Жалобы на поведение: 2005 г .: две тысячи двести шестьдесят шесть. 2006: Один тысяч пятьсот шестьдесят пять с уменьшением на минус тридцать целых девять десятых процента. Благодарности: 2005 год: пятьсот сорок семь. 2006: пятьсот девяносто четыре с увеличением на восемь целых шесть десятых процента.Использование лифта: 2005 г .: триста пятьдесят пять тысяч восемьсот семьдесят четыре. 2006: Триста пять тысяч семьсот пять с уменьшением на минус четырнадцать целых одна десятая процента. Мили между отказами лифта: 2005: восемьдесят шесть тысяч четыреста двадцать девять. 2006: сто пятьдесят одна тысяча пятьсот двадцать пять за увеличение на семьдесят пять целых целых три десятых процента. Доступный: Процент потерянных дней: 2005: семь целых семь десятых процента.2006: Семь целых восемь десятых процента для увеличения на ноль целых пять десятых процента. РЕЛЬС Поездка: День недели: 2005 год: шестьсот восемь тысяч сто пятьдесят семь. 2006: Шестьсот тридцать пять тысяч четыреста тридцать девять с увеличением четыре целых пять десятых процента. Суббота: 2005 год: триста сорок тысяч двадцать. 2006: триста шестьдесят тысяч двести девяносто один с увеличением на шесть процентов. Воскресенье: 2005 год: двести сорок одна тысяча триста пятьдесят пять.2006: Двести пятьдесят четыре тысячи семьсот девяносто один на увеличение пять целых шесть десятых процента. Итого: 2005 г .: сто восемьдесят шесть миллионов семьсот пятьдесят девять тысяч, пятьсот двадцать четыре. 2006: сто девяносто пять миллионов сто шестьдесят девять тысяч триста десять с увеличением на четыре целых пять десятых процента. Пассажирских миль: 2005 год: один миллиард сто тридцать шесть миллионов четыреста шестьдесят четыре тысячи пятьсот девяносто три.2006: Один миллиард сто восемьдесят семь миллионов четыреста шестьдесят три тысячи сто семьдесят пять с увеличением на четыре целых пять десятых процента. ВОВРЕМЯ: Количество железнодорожных рейсов с опозданием более 10 минут: 2005 г .: тысяча, семьсот двадцать шесть. 2006 год: одна тысяча четыреста девяносто три за снижение на минус тринадцать целых пять десятых процента. Среднее расстояние между поездами, выведенными из эксплуатации: 2005 г .: восемь сто шестнадцать тысяч восемьсот семьдесят один.2006: триста двадцать шесть тысяч восемьсот сорок пять с уменьшением минус шестьдесят процентов. ЧИСТЫЙ: Процент автобусов, очищенных и подметаемых до утра Обслуживание: Выполняется ежедневно как за 2005, так и за 2006 год без процентных изменений. Среднее количество дней между внешними стирками: 2005: одиннадцать. 2006: Десять за снижение на минус девять целых один процент. Количество дней между основными чистками: 2005: двадцать четыре. 2006: тридцать три для увеличения на тридцать семь целых пять десятых процента.Количество жалоб на чистоту: 2005 г .: сто двадцать две. 2006 год: сто тридцать три, что на девять процентов больше. Процент граффити, удаленных через двадцать четыре часа после жалобы: выполнено ежедневно как за 2005, так и за 2006 год без процентных изменений. БЕЗОПАСНЫЙ: Жалобы на безопасность: 2005 г .: триста двадцать один. 2006 год: двести семьдесят три с уменьшением на минус пятнадцать процентов. Число инцидентов, связанных с безопасностью NTD, на 1 миллион миль: 2005: 44 балла сорок шесть.2006 год: на один девяносто четыре пункта меньше, чем на минус девяносто пять пунктов. шесть процентов. Количество аварий на сто тысяч миль: 2005: ноль целых двенадцать. 2006 год: ноль тринадцать десятых, увеличение на восемь целых три десятых процента. Количество инцидентов, связанных с безопасностью NTD, на 1 миллион миль, несущественные: 2005 г .: пять точка шестьдесят. 2006 год: два целых шестнадцать целых десятых десятых, то есть уменьшение на минус шестьдесят одна целая четыре целых. процентов. Количество инцидентов, связанных с безопасностью NTD, на 1 миллион миль, крупные: 2005 г .: ноль баллов тридцать один.2006: ноль двенадцать целых двенадцати целых пункта при снижении на шестьдесят одну целую три десятых. процентов. ДРУЖЕЛЮБНО: Жалобы на поведение: 2005 г .: триста двадцать один. 2006: Три сто пятьдесят девять с увеличением на одиннадцать целых восемь десятых процента. Благодарности: 2005 г .: сто тридцать шесть. 2006: сто тридцать- семь с увеличением на ноль целых семь десятых процента. Срок службы эскалатора: 2005 год: девяносто пять целых четыре десятых процента. 2006: девяносто- шесть процентов для увеличения на ноль целых шесть десятых процента.Срок службы лифта: 2005 год: девяносто семь целых шесть десятых процента. 2006: девяносто- шесть процентов при уменьшении на минус одну целую целую шесть десятых процента. ДОСТУПНЫЙ: Процент потерянных дней: 2005: семь целых пять десятых процента. 2006: Семь баллов семь процентов для увеличения на две целые семь десятых процента. 1 из 4
Сводные законы штата Нью-Йорк, Закон штата — STL §4
Граница между штатами Нью-Йорк и Вермонт должна быть и настоящим устанавливается следующим образом: Начиная с каменной границы, стоящей на восточном склоне холма, на широте сорок два градуса сорок четыре минуты сорок- пять двести одна тысячная секунды на север, семьдесят три градуса пятнадцать минут пятьдесят четыре и девятьсот четыре тысячных секунды к западу от Гринвича, точка на южной линии штата Вермонт; оттуда линия идет по направлению к северу восемьдесят восемь градусов тридцать три минуты двадцать секунд на запад, три тысячи двести пять и семь десятых футов до памятника номер два, стоящего в юго-западном углу штата Вермонт; оттуда на север в одиннадцати градусах пятьдесят девять секунд на запад, двадцать одна тысяча восемьсот шестьдесят восемь и восемь десятых футов, до памятника номер шесть на северо-западном склоне горы и в ста девяноста футах к северо-западу до небольшого ручья, который впадает в реку. Река Хосик примерно в четырехстах футах вверх по течению от нижнего крытого моста в Северном Паунале; оттуда на двадцать девять градусов одна минута тридцать три секунды на восток, две тысячи шестьсот сорок футов, до памятника номер семь, который представляет собой большой гранитный блок, установленный на дне ручья, упомянутого выше, в месте, где он впадает в реку Хусич. ; оттуда на север семь градусов восемнадцать минут семнадцать секунд на запад, триста девяносто шесть футов вдоль западного берега реки Хусич до памятника номер восемь на северной стороне шоссе, ведущего из Северного Паунала в Северный Петербург, и около северо-западного угла крытого моста ранее упоминалось; оттуда на север двадцать один градус двадцать одна минута сорок три секунды на восток, две тысячи пятнадцать и пять десятых футов через реку Хусич до памятника номер девять, на юго-западной стороне западного пути железной дороги Бостона и Мэна, и находится между указанная тропа и река Хусич напротив уступа скалы; отсюда к северу тридцать градусов сорок минут семь секунд к западу, одна тысяча сто пятьдесят шесть и две десятых фута вдоль северо-восточного берега реки Хусич до памятника номер десять между указанной рекой и колеями железной дороги Бостона и Мэна, идущих на запад; оттуда на север, четырнадцать градусов сорок минут на запад, одна тысяча сто семьдесят три и семь десятых футов через указанную колею и шоссе, ведущее от северного Паунала до перекрестка Петербурга к памятнику номер двенадцать, на выступе холма к северу от указанного шоссе и у угол двух каменных стен; оттуда на север, пять градусов девятнадцать минут пятьдесят семь секунд на восток, пять тысяч восемьдесят два фута до памятника номер тринадцать, на северной стороне шоссе, известного как Скиппери-роуд, и примерно в четырехстах двадцати футах к юго-востоку от дома на землях, принадлежащих Эдгару Грину. ; оттуда на север сорок градусов двадцать минут на восток, триста девяносто шесть футов до памятника номер четырнадцать, на опушке леса на юго-западном склоне холма к северу от дороги Скиппери; оттуда на юг семьдесят один градус тридцать девять минут пятьдесят пять секунд на восток, одна тысяча шестьсот двадцать шесть и две десятых фута до памятника номер пятнадцать, в лесу и на склоне холма к северу от Скиппери-роуд; оттуда на три градуса двадцать минут восемнадцать секунд на восток, одна тысяча четыреста восемьдесят два и три десятых фута до памятника номер шестнадцать, на углу городов Паунэл и Беннингтон; оттуда на один градус тридцать три минуты пять секунд на восток, тридцать пять тысяч триста тридцать пять и семь десятых фута до памятника номер двадцать семь, на углу городов Беннингтон и Шафтсбери; оттуда два градуса семь минут двадцать пять секунд на восток, тридцать пять тысяч сто шестьдесят пять и шесть десятых футов до памятника номер сорок на углу городов Шафтсбери и Арлингтон; оттуда на два градуса сорок пять минут семнадцать секунд на восток, тридцать три тысячи девятьсот шестьдесят один фут до памятника номер пятьдесят два, на углу городов Арлингтон и Сэндгейт; оттуда на север в одном градусе двадцать семь минут три секунды на восток, одиннадцать тысяч сто пятьдесят четыре и четыре десятых фута до памятника номер пятьдесят пять, на северной стороне дороги Камден-Вэлли и примерно в четверти мили к западу от Р.Дом К. Смита; оттуда на север два градуса сорок две минуты девять секунд на восток, шестнадцать тысяч восемьсот шестьдесят восемь и восемь десятых фута до памятника номер шестьдесят, на северной стороне дороги Битти Холлоу; оттуда на север один градус пятьдесят одна минута девять секунд на восток, две тысячи семьсот восемьдесят пять и три десятых фута до памятника номер шестьдесят один на северной стороне дороги Перкинс-Холлоу; оттуда на один градус пятьдесят минут сорок секунд на восток, три тысячи триста восемьдесят девять десятых фута до памятника номер шестьдесят два, на углу городов Сэндгейт и Руперт; оттуда на один градус сорок шесть минут двадцать четыре секунды на восток, три тысячи девятьсот восемьдесят шесть и семь десятых фута до памятника номер шестьдесят три на южной стороне дороги Салем-Руперт; оттуда на один градус сорок минут тридцать три секунды на восток, шестьсот сорок один и пять десятых фута до памятника номер шестьдесят четыре, на южной стороне полосы отвода железной дороги Делавэр и Гудзон; оттуда на север один градус тридцать восемь минут девять секунд на восток, три тысячи четыреста шестьдесят четыре и две десятых фута до памятника номер шестьдесят пять, на вершине длинного открытого склона на северной стороне и с видом на долину в Западном Руперте; оттуда на север три градуса двадцать три минуты тридцать четыре секунды на восток, три тысячи шестьсот шестьдесят один и семь десятых фута до памятника номер шестьдесят семь, в точке примерно на полпути между двумя шоссе и примерно в одной и одной трети мили к северу. железной дороги Делавэра и Гудзона; отсюда на север, три градуса тридцать одна минута пятьдесят пять секунд на восток, три тысячи триста двадцать шесть и две десятых фута до памятника номер шестьдесят девять, на пологом участке между двумя ручьями; оттуда на север в одном градусе двадцать три минуты тридцать одна секунда на восток, двадцать тысяч четыреста пятьдесят шесть и две десятых фута до памятника номер семьдесят шесть, на углу графств Беннингтон и Ратленд; оттуда на север один градус тридцать две минуты три секунды на восток, четырнадцать тысяч двадцать пять и пять десятых футов до памятника номер восемьдесят, в Вест-Полете, на северной стороне шоссе, ведущего на юго-запад от указанной деревни, и примерно в трехстах пятидесяти футах от Делавэра. и железнодорожный переезд Гудзон в Вест-Полете; оттуда на один градус сорок девять минут четырнадцать секунд на восток, двадцать тысяч триста восемьдесят один и девять десятых фута до памятника номер девяносто, на углу городов Полет и Уэллс; оттуда на один градус тридцать пять минут двадцать девять секунд на восток, девятнадцать тысяч триста семьдесят два и девять десятых фута до памятника номер девяносто шесть, на углу городов Уэллс и Поултни; оттуда на один градус двадцать восемь минут пятьдесят девять секунд на восток, девятнадцать тысяч двести сорок пять и две десятых фута до памятника номер сто один, на южном берегу реки Поултни; оттуда около пятидесяти пяти футов по предыдущему курсу продолжились в середине самого глубокого русла указанной реки; оттуда по середине самого глубокого русла указанной реки в Восточный залив; оттуда по середине самого глубокого канала Восточного залива и его вод туда, где он соединяется с озером Шамплейн; оттуда вдоль середины самого глубокого канала озера Шамплейн к востоку от островов, называемых Четыре брата, и к западу от островов, называемых Гранд-Айл и Лонг-Айл, или Два героя, и к западу от острова Ла-Мотт, до параллели сорок пятого градуса северной широты, по данным Валентайна и Коллинза, от семнадцатисот семидесяти одного до семнадцатисот семидесяти четырех; согласно отчету от седьмого октября семнадцатьсот девяносто первого года уполномоченных, назначенных главой восемнадцатой законов, принятых на тринадцатой сессии законодательного собрания этого штата в семнадцатьсот девяносто; таким образом, включая в пределах штата Нью-Йорк всю ту часть бывшего города Фэйр-Хейвен, ранее входившую в графство Ратленд и штат Вермонт, лежащую к западу от середины самого глубокого русла реки Поултни, как она сейчас протекает, и между середина самого глубокого русла такой реки и западная линия штата Вермонт, установленная 19 марта тысяча восемьсот семьдесят девятого марта, как это описано в законодательном органе штата Вермонт, озаглавленном «Акт о присоединении та часть города Фэйр-Хейвен, лежащая к западу от реки Поултни, в штате Нью-Йорк «и одобрена губернатором Вермонта 27 ноября тысяча восемьсот семьдесят шестого ноября.Принятие этим государством суверенитета и юрисдикции такой уступленной территории, которое вступило в силу седьмого апреля тысяча восемьсот восемьдесят лет, даты утверждения акта конгресса о согласии на такую уступку, остается в силе. Ничто в этом разделе не должно рассматриваться как влияющее на определение границы между штатом Нью-Йорк и содружеством Массачусетс.
РАЗДЕЛ 2.КОРПОРАТИВНЫЕ ГРАНИЦЫ.
Корпоративные границы указанного города, если они не будут изменены или расширены иным образом, будут следующими: начиная со стоянки в нижней отметке реки Огайо на землях, принадлежащих наследникам Милтон Паден; оттуда через земли указанных наследников через полосу отчуждения компании Baltimore and Ohio Railroad Company южнее двадцать девять градусов пятьдесят минут восточной долготы одна тысяча сто футов до столба на центральной линии Union Traction Company на северо-восточной стороне переулка Харрисон в районе Александра дополнение к Паден-сити; отсюда с северо-восточной линией указанного переулка Харрисона к югу, двадцать девять градусов пятьдесят минут восточной долготы, одна тысяча триста семьдесят пять футов до столба; оттуда на юг шестьдесят один градус тридцать минут на запад одна тысяча пятьсот сорок два фута до столба; оттуда на юг пятьдесят восемь градусов тридцать минут на запад шестьсот девяносто один фут до столба; оттуда на юг восемьдесят два градуса тридцать минут на запад сто восемьдесят три фута до большой скалы; оттуда на юг шестьдесят шесть градусов десять минут на запад семьсот двадцать один фут до столба под дорогой графства; оттуда на юг пятьдесят один градус тридцать минут на запад девятьсот двенадцать футов до столба забора; оттуда на юг сорок восемь градусов двадцать пять минут на запад восемьсот двадцать четыре фута до столба забора; оттуда на север, шестнадцать градусов на запад, триста футов до столба; оттуда на юг семьдесят один градус тридцать минут на запад восемьдесят четыре фута до столба; оттуда на юг шестьдесят шесть градусов тридцать минут на запад одна тысяча семьсот девятнадцать футов до столба; оттуда на юг шестьдесят шесть градусов тридцать минут на запад пятьсот восемнадцать футов до столба; оттуда на юг шестьдесят два градуса пятнадцать минут на запад в пятистах пятидесяти футах до столба; оттуда на юг пятьдесят четыре градуса пятнадцать минут на запад триста восемьдесят два фута до столба; оттуда на юг, пятьдесят пять градусов на запад, девяносто футов до столба; оттуда на юг шестьдесят один градус тридцать минут на запад четыреста пятнадцать футов до столба; отсюда к югу семьдесят градусов тридцать минут к западу к западу сто восемьдесят пять футов до столба; оттуда на юг шестьдесят один градус западного четыреста два фута до столба; оттуда на юг шестьдесят шесть градусов десять минут на запад четыреста двадцать пять футов до столба; оттуда на север двадцать семь градусов пятнадцать минут на запад четыреста пятьдесят один фут до столба у отметки низкого уровня воды реки Огайо, а оттуда течет с указанной рекой к месту ее начала следующими курсами и расстояниями, а именно на север сорок -три градуса восточной долготы сто девяносто девять футов, тридцать пять градусов северной широты шестьсот пятьдесят три фута; северной широты тридцать шесть градусов сорок пять минут восточной долготы семьсот шестьдесят шесть футов; тридцать шесть градусов сорок пять минут на восток триста шесть футов; тридцать девять градусов тридцать минут на восток двести девять футов; тридцать два градуса пятнадцать минут восточной долготы пятьсот двадцать девять футов; на север тридцать два градуса восточной долготы триста семнадцать футов; двадцать шесть градусов северной широты восемьдесят один фут; восемнадцать градусов сорок пять минут на восток сто тридцать два фута; тридцать два градуса пятнадцать минут к востоку девяносто шесть футов; тридцать восемь градусов пятнадцать минут восточной долготы сто тридцать пять футов; тридцать шесть градусов к северу сто двадцать четыре фута; тридцать два градуса тридцать минут на восток сто сорок семь футов; на север сорок градусов пятнадцать минут на восток сто тридцать шесть футов; тридцать восемь градусов десять минут северной широты двести четырнадцать футов; сорок восемь градусов двадцать минут на восток двести шестьдесят футов; сорок три градуса на север тридцать минут на восток одна тысяча один фут; сорок четыре градуса северной широты пятнадцать минут восточной долготы сто двадцать пять футов; на север сорок шесть градусов пятнадцать минут и на восток сто девяносто девять футов; сорок семь градусов северной широты восемьсот девяносто один фут; на север пятьдесят три градуса восточной долготы.двести семьдесят четыре фута; северной широты шестьдесят два градуса восточной долготы пятьдесят одна минута восточной долготы сто шестьдесят два фута; шестьдесят шесть градусов сорок пять минут на восток сто восемьдесят восемь футов; восемьдесят один градус восточной долготы двести одиннадцать футов; восемьдесят один градус восточной долготы шестьсот шестьдесят пять футов; оттуда на север семьдесят три градуса пятнадцать минут на восток триста тридцать шесть футов; семьдесят семь градусов восточной долготы, одна тысяча двести шестьдесят восемь футов; шестьдесят пять градусов сорок пять минут на восток — пятьсот пятьдесят футов до начала.
Цифры | Union College
Цифра — это цифра, буква, слово или группа слов, выражающая число.
Арабские цифры
В арабских цифрах используются цифры 1, 2, 3, 4, 5, 6, 7, 8, 9 и 0. Используйте арабские формы, если специально не требуются римские цифры.
В большинстве случаев числа от 10 и выше должны быть представлены в числовом виде. Если необходимо написать большие числа по буквам, используйте дефис, чтобы соединить слово, оканчивающееся на «y», с другим словом; не используйте запятые или союз и для разделения слов, которые являются частью одного и того же числа: двадцать одно; сто сорок три; одна тысяча сто пятьдесят пять; один миллион двести семьдесят шесть тысяч пятьсот восемьдесят семь.
Введите число в начале предложения. Если объяснять это слишком неудобно, перепишите предложение. Единственным исключением из этого правила является число, обозначающее календарный год.
- Осенью выпустились пятьсот студентов.
- 1967 год начался с большого количества снега.
Укажите случайные ссылки.
- Примеры: Большое спасибо! Но тысячу раз нет!
- Он прошел четверть мили.
При упоминании имен собственных используйте слова или цифры в соответствии с практикой организации, например, 20th Century Fox.
Для порядковых номеров (первый, второй, десятый, 1-й, 2-й, 10-й и т. Д.) Пишите с первого по девятый, когда они указывают последовательность во времени или местоположении, например, первая база, Первая поправка или он был первым в строке. Начиная с 10-го, используйте цифры.
Используйте 1-й, 2-й, 3-й и т. Д., Когда последовательность была назначена при формировании имен, включая географические, военные и политические обозначения, такие как 1-й район, 7-й флот или 1-й сержант.
Для количественных чисел в большинстве случаев используйте целые числа меньше 10 и используйте цифры от 10 и выше.
Римские цифры
В римских цифрахиспользуются буквы I, V, X, L, C, D и M. Используйте римские цифры для обозначения войн и для обозначения личной последовательности животных и людей: Вторая мировая война, король Георг VI и т. Д. См. «Семейное происхождение» в разделе «Сокращения». для дополнительной информации.
В римских цифрах заглавная буква I равна 1, V равно 5, X равно 10, L равно 50, C равно 100, D равно 500 и M равно 1000. Не используйте букву M для обозначения миллиона, как это иногда делается в некоторых публикациях.
Остальные числа образуются из них путем сложения или вычитания следующим образом:
Добавляется значение буквы, следующей за другой с таким же или большим значением: III равно 3.
Значение буквы, предшествующей одной из большего значения, вычитается: IV равно 4.
Телефонные номера
Во всех ссылках используйте круглые скобки вокруг кода города. Это основано на формате, который телефонные компании согласовали для внутренней и международной связи.
Для номеров в США после скобок вокруг кода города следует поставить пробел, трехзначный префикс, дефис, а затем оставшиеся четыре цифры телефонного номера.
Поскольку прямые телефонные номера доступны для связи с кафедрами, офисами и отдельными преподавателями, сотрудниками и студентами Колледжа, их следует по возможности использовать вместо основного номера телефона Колледжа (518) 388-6000 вместе с соответствующим добавочным телефоном.
Для внутренних публикаций можно использовать только расширения. Когда указаны добавочные номера, слово «расширение» может быть написано с заглавной буквы и сокращено, если оно сопровождается конкретным номером.
- Со старшим директором по коммуникациям и маркетингу можно связаться по доб.6285.
Введение в целые числа — предалгебра
Цели обучения
К концу этого раздела вы сможете:
- Определить счетные числа и целые числа
- Целые числа модели
- Определить значение разряда цифры
- Используйте разряд для именования целых чисел
- Используйте разряд для записи целых чисел
- Круглые целые числа
Определить счетные числа и целые числа
Изучение алгебры похоже на изучение языка.Вы начинаете с базового словарного запаса, а затем пополняете его по мере продвижения. Вам нужно часто практиковаться, пока словарный запас не станет для вас легким. Чем больше вы используете словарный запас, тем он становится более знакомым.
Алгебра использует числа и символы для обозначения слов и идей. Давайте сначала посмотрим на цифры. Самые основные числа, используемые в алгебре, — это те, которые мы используем для подсчета объектов: и так далее. Они называются счетными числами. Обозначение «…» называется многоточием, что является еще одним способом показать «и т. Д.» Или то, что узор продолжается бесконечно.Счетные числа еще называют натуральными числами.
Выполнение упражнения «Манипулятивная математика» Строка с числами — Часть 1 поможет вам лучше понять счетные числа и целые числа.
Счетные числа
Подсчет чисел начинается и продолжается.
Подсчет чисел и целых чисел можно визуализировать в числовой строке, как показано на (Рисунок).
Числа в числовой строке увеличиваются слева направо и уменьшаются справа налево.
Отмеченная точка называется исходной точкой. Точки расположены через равные промежутки справа и помечены счетными числами. Когда число сопоставляется с точкой, оно называется координатой точки.
Открытие числа ноль стало большим шагом в истории математики. Включение нуля в счетные числа дает новый набор чисел, называемых целыми числами.
Целые числа
Целые числа — это счетные числа и ноль.
Мы остановились на перечислении первых нескольких счетных чисел и целых чисел. Мы могли бы написать больше чисел, если бы они были необходимы, чтобы прояснить закономерности.
Какие из следующих ⓐ подсчетных чисел? Ⓑ целые числа?
Решение
Цифры и не считаются ни числами, ни целыми числами. Мы обсудим эти цифры позже.
Что из перечисленного является ⓐ счетными числами ⓑ целыми числами?
- ⓐ 2, 9, 241, 376
- ⓑ 0, 2, 9, 241, 376
Что из перечисленного является ⓐ счетными числами ⓑ целыми числами?
- 7, 13, 201
- ⓑ 0, 7, 13, 201
Целые номера моделей
Наша система счисления называется разрядной, потому что значение цифры зависит от ее положения или места в числе.Число имеет другое значение, чем число. Несмотря на то, что в них используются одни и те же цифры, их значение отличается из-за разного расположения символов и и
.Деньги дают нам знакомую модель стоимости. Предположим, в бумажнике есть три купюры, семь купюр и четыре купюры. Суммы суммированы на (Рисунок). Сколько денег в кошельке?
Найдите общую стоимость каждого вида банкнот, а затем сложите, чтобы найти общую сумму. В кошельке
БлокиBase-10 предоставляют другой способ моделирования разряда, как показано на (Рисунок).Блоки могут использоваться для обозначения сотен, десятков и единиц. Обратите внимание, что стержень десятков состоит из единиц, а квадрат сотен состоит из десятков или единиц.
(рисунок) показывает число, смоделированное с помощью блоков.
Мы используем обозначение разряда, чтобы показать значение числа.Используйте обозначение разряда, чтобы найти значение числа, моделируемого показанными блоками.
Используйте обозначение разряда, чтобы найти значение числа, моделируемого показанными блоками.
Используйте обозначение разряда, чтобы найти значение числа, моделируемого показанными блоками.
Выполнение упражнения по манипуляционной математике «Моделирование целых чисел» поможет вам лучше понять разрядную ценность целых чисел.
Определите значение разряда цифры
Посмотрев на деньги и блоки, мы увидели, что каждое место в числе имеет разное значение. Диаграмма разметки — полезный способ обобщить эту информацию.Значения разряда разделены на группы по три, называемые точками. Периоды — единиц, тысячи, миллионы, миллиарды, триллионы и так далее. В записанном номере точки разделяют запятыми.
Как и в случае с блоками, где значение стержня десятков в десять раз больше значения блока единиц, а значение квадрата сотен в десять раз больше стержня десятков, значение каждого места в таблице значений разряда равно десяти. умноженное на стоимость места справа от него.
(рисунок) показывает, как число записывается на диаграмме разряда.
Решение
Напишите число в таблице значений разряда, начиная справа.
- ⓐ десять миллионов
- ⓑ десятки
- ⓒсот тысяч
- ⓓ миллионов
- ⓔ единицы
- ⓐ млрд
- ⓑ десять тысяч
- ⓒ десятки
- ⓓсот тысяч
- ⓔ сотен миллионов
Используйте разрядное значение для именования целых чисел
Когда вы выписываете чек, вы записываете число как прописью, так и цифрами.Чтобы записать число словами, напишите число в каждой точке, за которым следует название периода без буквы «s» в конце. Начните с цифры слева, которая имеет наибольшее разрядное значение. Точки разделяются запятыми, поэтому, если в числе есть запятая, ставьте запятую между словами. Период единиц, имеющий наименьшее разрядное значение, не называется.
Итак, записано число тридцать семь миллионов пятьсот девятнадцать тысяч двести сорок восемь.
Обратите внимание, что слова и не используются при именовании целого числа.
Назовите целое число прописью.
- Начиная с цифры слева, назовите число в каждой точке, после чего укажите название периода. Не включайте название периода для тех.
- Используйте запятые в числах для разделения точек.
Назовите номер прописью.
Решение
Начните с крайней левой цифры, которая равна 8. Она находится в разряде триллионов. восемь триллионов Следующий период справа — миллиарды. сто шестьдесят пять миллиардов Следующий период справа — миллионы. четыреста тридцать два миллиона Следующая точка справа — тысячи. девяносто восемь тысяч Крайняя правая точка показывает единицы. семьсот десять Собрав все слова вместе, мы запишем как восемь триллионов, сто шестьдесят пять миллиардов, четыреста тридцать два миллиона, девяносто восемь тысяч, семьсот десять.
Назовите каждое число прописью:
девять триллионов двести пятьдесят восемь миллиардов сто тридцать семь миллионов девятьсот четыре тысячи шестьдесят один
Назовите каждое число прописью:
семнадцать триллионов восемьсот шестьдесят четыре миллиарда триста двадцать пять миллионов шестьсот девятнадцать тысяч четыре
Студент провел исследование и обнаружил, что количество пользователей мобильных телефонов в Соединенных Штатах в течение одного месяца было Назовите это число прописью.
Решение
Определите периоды, связанные с номером.
Назовите число в каждом периоде, после которого укажите название периода. Разделяйте точки запятыми.
Период миллионов: триста двадцать семь миллионов
Период тысяч: пятьсот семьдесят семь тысяч
Единичный период: пятьсот двадцать девять
Таким образом, количество пользователей мобильных телефонов в Соединенных Штатах в течение апреля составило триста двадцать семь миллионов пятьсот семьдесят семь тысяч пятьсот двадцать девять.
Население страны назовите это число.
триста шестнадцать миллионов сто двадцать восемь тысяч восемьсот тридцать девять
Один год — секунды. Назовите этот номер.
тридцать один миллион пятьсот тридцать шесть тысяч
Используйте разряд для записи целых чисел
Теперь обратимся к процессу и запишем число, данное словами, цифрами.
Используйте разряд, чтобы написать целое число.
- Определите слова, обозначающие точки. (Помните, что период единиц никогда не называется.)
- Нарисуйте три пробела, чтобы указать количество мест, необходимых в каждом периоде. Разделите точки запятыми.
- Назовите число в каждой точке и разместите цифры в правильных позициях разряда.
Запишите следующие числа цифрами.
- ⓐ пятьдесят три миллиона четыреста одна тысяча семьсот сорок два
- ⓑ девять миллиардов двести сорок шесть миллионов семьдесят три тысячи сто восемьдесят девять
Решение
ⓐ Найдите слова, обозначающие точки.
За исключением первого периода, все остальные периоды должны иметь три места. Нарисуйте три пробела, чтобы указать количество мест, необходимых в каждом периоде. Разделите точки запятыми.
Затем запишите цифры в каждом периоде.
Сложите числа, включая запятые. Номер
ⓑ Найдите слова, обозначающие точки.
За исключением первого периода, все остальные периоды должны иметь три места. Нарисуйте три пробела, чтобы указать количество мест, необходимых в каждом периоде.Разделите точки запятыми.
Затем запишите цифры в каждом периоде.
Номер
Обратите внимание, что в части ⓑ ноль нужен как заполнитель в разряде сотен тысяч. Обязательно пишите нули по мере необходимости, чтобы убедиться, что каждая точка, кроме, возможно, первой, имеет три знака.
Напишите каждое число в стандартной форме:
пятьдесят три миллиона восемьсот девять тысяч пятьдесят один.
Напишите каждое число в стандартной форме:
два миллиарда двадцать два миллиона семьсот четырнадцать тысяч четыреста шестьдесят шесть.
А госбюджет был около миллиарда. Напишите бюджет в стандартной форме.
Решение
Определите периоды. В этом случае даны только две цифры, и они находятся в периоде в миллиарды. Чтобы записать все число, напишите нули для всех остальных точек.
Так бюджет был около
Напишите каждое число в стандартной форме:
Ближайшее расстояние от Земли до Марса составляет около миллиона миль.
Напишите каждое число в стандартной форме:
Общий вес авианосца составляет миллион фунтов.
Округление целых чисел
В Бюро переписи населения США численность населения штата Нью-Йорк указана как человек. Достаточно сказать, что население составляет около миллиона человек. Слово приблизительно означает, что миллион не является точным населением, но близко к точному значению.
Процесс округления числа называется округлением. Числа округляются до определенного разряда в зависимости от требуемой точности. миллион был получен округлением до разряда миллионов.Если бы мы округлили до ста тысяч, мы бы получили результат. Если бы мы округлили до десятков тысяч, мы получили бы результат и так далее. Разрядное значение, до которого мы округляем, зависит от того, как нам нужно использовать число.
Использование числовой прямой может помочь вам визуализировать и понять процесс округления. Посмотрите на числовую линию на (Рисунок). Предположим, мы хотим округлить число до ближайшего десяти. Ближе к числовой прямой или на ней?
Теперь рассмотрим число Найти в (Рисунок).
Как округлить до десяти. Найдите в (Рисунок).
Число ровно посередине между иЧтобы в подобных случаях все округляли одинаково, математики договорились округлять до большего числа. Итак, с округлением до ближайшей десятки получается
.Теперь, когда мы рассмотрели этот процесс на числовой прямой, мы можем ввести более общую процедуру. Чтобы округлить число до определенного места, посмотрите на число справа от этого места. Если число меньше, округлите в меньшую сторону.Если оно больше или равно, округлить в большую сторону.
Так, например, чтобы округлить до ближайших десяти, мы смотрим на цифру в разряде единиц.
Цифра в разряде единиц — это потому, что она больше или равна, мы увеличиваем цифру в разряде десятков на единицу. Таким образом, разряды десятков превращаются в. Теперь замените все цифры справа от нулей. Итак, округляется до
Давайте еще раз посмотрим на округление до ближайшего. Снова посмотрим на единицу.
Цифра в разряде единиц — Потому что она меньше, чем мы оставляем цифру в разряде десятков такой же и заменяем цифры справа от нее на ноль. Таким образом, округляя до десяти, получается
.Округлить целое число до определенного разряда.
- Найдите указанное значение разряда. Все цифры слева от этого разряда не меняются.
- Подчеркните цифру справа от данного разряда.
- Определите, больше ли эта цифра или равна
- Да — добавьте к цифре в данном значении разряда.
- Нет — не изменять цифру в заданном значении разряда.
- Заменить все цифры справа от заданного значения разряда нулями.
Округлить до десяти:
Округлить до десяти:
Округлите каждое число до ближайшей сотни:
- ⓐ
- ⓑ
Округлить до ближайшей сотни:
Округлить до ближайшей сотни:
Округлите каждое число до ближайшей тысячи:
- ⓐ
- ⓑ
Округлить до ближайшей тысячи:
Округлить до ближайшей тысячи:
Ключевые концепции
- Назовите целое число прописью.
- Начиная с цифры слева, назовите число в каждой точке, после чего укажите название периода. Не включайте название периода для тех.
- Используйте запятые в числах для разделения точек.
- Используйте разряд для записи целого числа.
- Определите слова, обозначающие точки. (Помните, что период единиц никогда не называется.)
- Нарисуйте три пробела, чтобы указать количество мест, необходимых в каждом периоде.
- Назовите число в каждой точке и разместите цифры в правильных позициях разряда.
- Округлите целое число до определенного разряда.
- Найдите указанное значение разряда. Все цифры слева от этого разряда не меняются.
- Подчеркните цифру справа от данного разряда.
- Определите, больше ли эта цифра или равна 5. Если да, добавьте 1 к цифре в данном значении разряда. Если нет — не меняйте цифру в заданном значении разряда.
- Заменить все цифры справа от заданного значения разряда нулями.
Практика ведет к совершенству
Определить счетные числа и целые числа
В следующих упражнениях определите, какие из следующих чисел являются подсчетом чисел ⓑ целыми числами.
- ⓐ 50, 221
- ⓑ 0, 50, 221
Целые номера моделей
В следующих упражнениях используйте обозначение разряда, чтобы найти значение числа, моделируемого блоками.
Определение разряда цифры
В следующих упражнениях найдите разряд указанных цифр.
- ⓐ 9
- ⓑ 6
- 0
- ⓓ 7
- ⓔ 5
- ⓐ тыс.
- ⓑ сотки
- ⓒ десятки
- ⓓ десять тысяч
- ⓔсот тысяч
- ⓐ 9
- ⓑ 3
- ⓒ 2
- ⓓ 8
- ⓔ 7
- ⓐ 8
- ⓑ 6
- ⓒ 4
- ⓓ 7
- 0
- ⓐсот тысяч
- ⓑ миллионов
- ⓒ тыс.
- ⓓ десятки
- ⓔ десять тысяч
- ⓐ 8
- ⓑ 4
- ⓒ 2
- ⓓ 6
- ⓔ 7
Используйте разрядное значение для именования целых чисел
В следующих упражнениях назовите каждое число словами.
Одна тысяча семьдесят восемь
Триста шестьдесят четыре тысячи пятьсот десять
Пять миллионов восемьсот сорок шесть тысяч сто три
Тридцать семь миллионов восемьсот восемьдесят девять тысяч пять
Высота горы Ренье — фут.
Четырнадцать тысяч четыреста десять
Высота горы Адамс — фут.
Семьдесят лет — это часы.
Шестьсот тринадцать тысяч двести
Один год — это минуты.
Согласно переписи населения США, численность населения округа Майами-Дейд составляла
человек.Два миллиона шестьсот семнадцать тысяч сто семьдесят шесть
Население Чикаго составляло
человек.По прогнозам, через пять лет в США появятся студенты колледжей и университетов.
Двадцать три миллиона восемьсот шестьдесят семь тысяч
Около двенадцати лет назад в Калифорнии были зарегистрированы автомобили.
Ожидается, что население Китая достигнет
человек.Один миллиард триста семьдесят семь миллионов пятьсот восемьдесят три тысячи сто пятьдесят шесть
Население Индии оценивается на июль
человек.Используйте разряд для записи целых чисел
В следующих упражнениях запишите каждое число как целое число, используя цифры.
тридцать пять тысяч девятьсот семьдесят пять
шестьдесят одна тысяча четыреста пятнадцать
одиннадцать миллионов сорок четыре тысячи сто шестьдесят семь
восемнадцать миллионов сто две тысячи семьсот восемьдесят три
три миллиарда двести двадцать шесть миллионов пятьсот двенадцать тысяч семнадцать
одиннадцать миллиардов четыреста семьдесят один миллион тридцать шесть тысяч сто шесть
Население мира оценивается в семь миллиардов сто семьдесят три миллиона человек.
Возраст Солнечной системы оценивается в четыре миллиарда пятьсот шестьдесят восемь миллионов лет.
Озеро Тахо вмещает тридцать девять триллионов галлонов воды.
Бюджет федерального правительства составлял три триллиона пятьсот миллиардов долларов.
Округление целых чисел
В следующих упражнениях округлите до указанного разряда.
Округлить до десяти:
- ⓐ
- ⓑ
Округлить до десяти:
- ⓐ
- ⓑ
Округлить до ближайшей сотни:
- ⓐ
- ⓑ
Округлить до ближайшей сотни:
- ⓐ
- ⓑ
Округлить до десяти:
- ⓐ
- ⓑ
Округлить до ближайшей тысячи:
- ⓐ
- ⓑ
Округлить до ближайшей сотни:
- ⓐ
- ⓑ
- ⓐ
- ⓑ
Округлить до ближайшей тысячи:
- ⓐ
- ⓑ
Повседневная математика
Выписка чека Хорхе купил машину для оплаты машины чеком.Напишите цену покупки прописью.
Двадцать четыре тысячи четыреста девяносто три доллара
Выписка чека Стоимость ремонта кухни Мариссы Она выписала чек подрядчику. Напишите проплаченную сумму прописью.
Покупка машины Хорхе купил машину за Круглую цену до ближайшей:
- ⓐ десять долларов
- ⓑ сто долларов
- ⓒ тысяч долларов
- ⓓ десять тысяч долларов
- ⓐ? 24,490
- ⓑ 24 500
- ⓒ 24 000
- ⓓ 20 000
Ремонт кухни Стоимость ремонта кухни Мариссы Округлите стоимость до ближайшего:
- ⓐ десять долларов
- ⓑ сто долларов
- ⓒ тысяч долларов
- ⓓ десять тысяч долларов
Население Численность населения Китая округлялась до ближайшей:
- ⓐ млрд человек
- ⓑ сто миллионов человек
- ⓒ млн человек
Астрономия Среднее расстояние между Землей и Солнцем составляет километры.Округлите расстояние до ближайшего:
- ⓐстамиллион километров
- ⓑ десять миллионов километров
- ⓒ млн километров
Письменные упражнения
Объясните своими словами разницу между счетными числами и целыми числами.
Ответы могут отличаться. Целые числа — это счетные числа с включением нуля.
Приведите пример из повседневной жизни, когда помогает округлять числа.
Самопроверка
ⓐ После выполнения упражнений используйте этот контрольный список, чтобы оценить свое мастерство в достижении целей этого раздела.
ⓑ Если бы большая часть ваших чеков была…
… уверенно. Поздравляю! Вы достигли целей в этом разделе. Поразмышляйте над своими учебными навыками, чтобы вы могли продолжать их использовать. Что вы сделали, чтобы убедиться в своей способности делать эти вещи? Быть конкретным.
… с некоторой помощью. Эту проблему нужно решать быстро, потому что темы, которые вы не осваиваете, становятся ухабами на вашем пути к успеху.В математике каждая тема основывается на предыдущей работе. Прежде чем двигаться дальше, важно убедиться, что у вас есть прочный фундамент. К кому вы можете обратиться за помощью? Ваши одноклассники и инструктор — хорошие ресурсы. Есть ли в кампусе место, где доступны репетиторы по математике? Можно ли улучшить свои учебные навыки?
… нет, я не понимаю! Это предупреждающий знак, игнорировать его нельзя. Вам следует немедленно обратиться за помощью, иначе вы быстро не справитесь. Как можно скорее обратитесь к своему инструктору, чтобы обсудить вашу ситуацию.Вместе вы сможете составить план оказания вам необходимой помощи.
Глоссарий
- координата
- Число в паре с точкой на числовой прямой называется координатой точки.
- счет цифр
- Счетные числа — это числа 1, 2, 3,….
- номер строки
- Числовая линия используется для визуализации чисел. Числа в числовой строке увеличиваются при перемещении слева направо и уменьшаются при перемещении справа налево.
Действия с числами с одинаковыми и разными знаками – — — — …
//Действия с числами, имеющими разные знаки. 6-й класс
Тип урока: игра “Математический поезд”
Цели:
– систематизация знаний по данной теме;
– повторение правил сложения и вычитания чисел с одинаковыми и разными знаками;
– повторение правил умножения и деления сложения и вычитания чисел с одинаковыми и разными знаками;
– повторение алгоритма решения уравнения;
– умение применять их при решении различных задач.Оборудование:
– цветные жетоны;
– интерактивный комплекс.
– жетоны;
– карточки;
– схема маршрута.“Математический поезд” состоит из 3-х вагонов: мягкого, купейного, плацкартного.
Условия игры.
1. Кассовый зал.
В кассовом зале каждый ученик получает посадочный талон с заданиями и 6 жетонов.
Решив все задачи, ученик обращается за получением билета.
Если ученик не может решить какое-либо задание, то он обращается в справочное бюро. В зависимости от содержания справки определяется “плата”.2. Справочное бюро.
Проверка правильности решения задачи и указание ошибки проводится бесплатно;
За наводящий вопрос, помогающий найти путь решения, платится 1 жетон;
За подсказку пути решения – 2 жетона;
За решение – 3 жетона.3. Получения билета.
В мягкий вагон – при правильном решении всех заданий и предъявлении в кассу более 3-х жетонов;
В купейный вагон – при решении всех заданий и предъявлении в кассу 3-х жетонов;
В плацкартный вагон – при решении всех заданий и предъявлении в кассу 1 или 2-х жетонов.План урока.
Кассовый зал.
I. Разминка.
Прочитать правила сложения и вычитания чисел с одинаковыми и разными знаками.Устно
-6 – 3,5
2,8 – 1,2
8,1 + 1,9
1 – 0,25
0,6 – 1,6Письменно
12,3 – 43,
-33,3 + 14,8
-16,7 – 19,14
1,324 – 5,18
-36,6 + 13,4При сложении двух чисел отрицательны
Надо модули сложить их обязательно.
И поставить минус перед суммой,
Только минус, обязательно подумай!
При сложении с разными знаками чисел
Надо меньший из большего модуля вычесть
И поставить того знак числа в результате,
Модуль больше которого, знай математик!
(Н. Зайцева).Прочитать правила умножения чисел с одинаковыми и разными знаками.
Устно
6*0,8
-4*0,7
-6,2*(-1)
-0,52*100
52*0,01Письменно
0,4*(-5,2)
-25,3*0,1
-0,14*(-20)
-4*3,5
24*15Прочитать правила деления чисел с одинаковыми и разными знаками.
Устно
4:0,4
2,4: (-12)
-2,5:(-5)
-3: 0,01
-0,2:0,1Письменно
0,2: (-4)
-56: (-0,7)
-2,6: 13
763: 0,1
-0,15: 0,01Не на шутку в самом деле,
Если Оля, Таня, Зина…
Умножают или делят
Два числа со знаком минус,
Получают, спора нет,
Положительный ответ.
Даже сказочный Емеля,
Чтобы спорились дела,
Умножает или делит
Разных знаков два числа.
Получает, не секрет,
Отрицательный ответ.
(Н. Зайцева).Проверка письменных заданий проводится на интерактивной доске.
II. Выдаются посадочные талоны и жетоны.
Письменно в тетрадях.
а) раскрыть скобки
а – (с + х + у – в)
а + (-х – у + в + с)б) привести подобные слагаемые
8х + 12а – 2х – 6а
-7х – (-4х – 3а) + 6а
7*(-2х + 3) – 4*(3х + 2)III. После проверки выдаются “посадочные билеты”:
– желтый – в мягкий вагон;
– зеленый – в купейный вагон;
– красный – в плацкартный вагонГолос диктора: “Внимание! Внимание! Прослушайте объявление! Математический поезд отправляется от станции “Школьная” и следует до станции “Решай-ка”. (Звучит бодрая музыка.)
Голос диктора: “Внимание! Внимание! Прослушайте объявление! Наш поезд прибывает на станцию “Решай-ка”. Вас встречает кандидат математических наук “Уравнение”.
“Уравнение” – “Здравствуйте, дорогие друзья. Очень радо встрече с вами. Ответьте, пожалуйста, на мои следующие вопросы:
– что называется уравнением?
– что называется корнем уравнения?
– что значит решить уравнение?
– какие уравнения называются равносильными?
– назвать алгоритм решения уравнения”.Самостоятельная работа по вариантам.
1-й в. -27х + 220 = – 5х
0,8*(9 + 2х) = 0,5*(2 – 3х)2-й в. 7х = -310 + 3а
0,5*(х + 3) = 0,8*(10 – х)Проверка – на интерактивной доске.
“Уравнение”: “Дорогие друзья! Вы все знаете об уравнении и умеете решать уравнения. Поэтому можете продолжить свое путешествие дальше”.
За правильное решение учащиеся получают карточку.
Голос диктора: “Внимание! Внимание! Прослушайте объявление! Математический поезд отправляется от станции “Школьная”.
(Звучит музыка.)
Голос диктора: “Внимание! Внимание! Прослушайте объявление! Наш поезд прибывает на станцию “Весенняя”. Здесь вас встречает
Задача: (решаем на доске).
Из одной скворечни одновременно в противоположные стороны вылетели 2 скворца. Скорость одного из них на 25 км\ч. больше скорости другого. Через 0,3 часа расстояние между ними стало 37,5 км. Найдите скорость каждого скворца.
Решение.
Пусть х км\ч. скорость первого скворца, тогда (х + 25) км\ч. – скорость второго скворца, (х + х + 25)*0,3 = 0,6х + 7,5 км. Расстояние между ними.
Уравнение: 0,6х + 7,5 = 37,5
0,6х = 30
х = 50
50 + 25 = 75(км\ч.) скорость второго скворца.
Ответ. 50км\ч., 75км\ч.Дано уравнение: 3х – 20 = х + 20.
Составьте по нему задачу и решите ее.
За правильное решение учащиеся получают карточку.
Голос диктора: “Внимание! Внимание! Прослушайте объявление! Математический поезд отправляется от станции “Весенняя”.
(Звучит музыка.)
Голос диктора: “Внимание! Внимание! Прослушайте объявление! Наш поезд прибывает на станцию “Угадай-ка”. Здесь вас встречает Емеля.
Проверьте, верно ли решены уравнения:
(Решают самостоятельно за партой, затем – на доске.)
3х + 8= -17
3х = -17 + 8
3х = 9
Х = 3
Ответ. 3.14х – 19 = 4х – 10
14х – 4х = -10 + 19
10х = 9
Х = 10:9
Х =1 1\9
Ответ. 1 1\93х – 6 = 2х – 4
3х – 2х = -4 + 6
Х = 2
Ответ. 2.За правильное решение учащиеся получают карточку.
Цифровой диктант.
(1 – да, 0 – нет ).
- Уравнение – это равенство, содержащее букву, значение которой надо найти.
- Чтобы найти неизвестное слагаемое, надо к сумме прибавить известное слагаемое.
- Решить уравнение – это найти все его корни, или убедиться, что их нет.
- Корень уравнения 0х = 0 равен 0.
- Корнем уравнения называется значение буквы, при котором оно обращается в верное равенство.
- Корни уравнения не изменяются, если обе части уравнения умножить или разделить на отличное от нуля число.
(1, 0, 1, 1, 1, 1 – ответ на интерактивной доске.)
За правильное решение учащиеся получают карточку.
Голос диктора: “Внимание! Внимание! Прослушайте объявление! Математический поезд отправляется от станции “Угадай-ка”.
В вагоне работают контролеры, предъявите цветные карточки, полученные за верные решения заданий во время путешествия. Наш поезд возвращается на станцию “Школьная”.
Итог урока.
Задание на дом.
№ № 1318(в), 1319 (ж,з), 1347.
Литература.
- Н.Я. Виленкин, В.И. Жохов, А.С. Чесноков, С.И. Шварцбург. Математика 6, МНЕМОЗИНА, Москва, 2005.
- В.В. Выговская. Поурочные разработки по математике. “ВАКО”, Москва, 2008.
- О.В. Панишева. Математика в стихах. “Учитель”, Волгоград.2009.
urok.1sept.ru
Действия с числами с разными знаками
Карточки для устного счета. Действия с положительными и отрицательными числами. 6 класс
— 38 + (-4)
-35 + (-9)
— 38 + (-4)
-35 + (-9)
— 38 + (-4)
-35 + (-9)-20 + 16
-7 + (-14)
-20 + 16
-7 + (-14)
-20 + 16
-7 + (-14)-0,8 + (-0,3)
-17 + (-8)
-0,8 + (-0,
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·educontest.net
Конспект урока по математике «Деление чисел с одинаковыми и разными знаками»
Деление чисел с одинаковыми и разными знаками
Цель урока: повторить правила сложения, вычитания и умножения рациональных чисел, иметь представление о делении чисел с одинаковыми и разными знаками.
Цель деятельности учителя: создать условия для формирования представлений о правиле деления чисел разного знака.
Планируемые результаты изучения темы:
Личностные: проявляют познавательный интерес к предмету.
Предметные: умеют решать примеры на все действия с положительными и отрицательными числами.
Метапредметные результаты изучения темы (универсальные учебные действия): познавательные: ориентируются на разнообразие способов решения задач; умеют проводить сравнительный анализ, сопоставлять, рассуждать; регулятивные: учитывают правило в планировании и контроле способа решения, формировать навыки самостоятельной работы устного и письменного характера, взаимо- и самоконтроля.; коммуникативные: считаются с разными мнениями и стремятся к координации различных позиций в сотрудничестве.
Тип урока:
Комбинированный урок
Используемое оборудование:
карточка путешественника; тематические плакаты и таблицы; раздаточные материалы: № 1 – текст устной самостоятельной работы «120 секунд», № 2 – текст разноуровневого задания «реши уравнение», № 3 – текст игрового задания «ключевое слово»
Урок — путешествие на тему:
«Деление рациональных чисел»
6 класс.
Оборудование: карточка путешественника; тематические плакаты и таблицы; раздаточные материалы: № 1 – разминка, № 2 – текст устной самостоятельной работы «120 секунд», № 3– текст разноуровневого задания «реши уравнение», № 4 – текст игрового задания» ключевое слово».
План урока.
1. Вступительное слово учителя.
2. Разминка. Задание «Найди ошибку» с взаимопроверкой в ПАРАХ.
3. Устная самостоятельная работа «120 секунд». Самопроверка с объяснением. Раздаточный материал № 2.
4. Изучение нового материала.
5. Закрепление изученного.
6. *Математическая зарядка.
7. Разноуровневая самостоятельная работа с проверкой «Реши уравнение». Раздаточный материал № 3 (в двух вариантах).
8. Тестовый контроль «Кодовый замок».
9. Творческая игра «Ключевое слово». Раздаточный материал № 4 (в трех вариантах).
10. Рефлексия. Подведение итогов.
11. Информация о домашнем задании. Инструктаж по его выполнению.
Сценарий урока.
1. Здравствуйте, ребята.
Мы будем путешествовать. Для этого вам потребуется карточка путешественника, на которой вы запишите свою фамилию и имя. Здесь же есть и маршрут нашего путешествия по стране «Рациональных чисел». Первым на нашем пути будет город «Знаек», Затем, перейдя через реку, мы попадём в город «Мудрецов». Последним на нашем пути будет город «Мастеров», Путешествуя, ребята, на каждом этапе урока вы будете «зарабатывать» баллы, которые необходимо записывать в свою карточку путешественника. А в конце урока, вы подсчитаете общее количество баллов и поставите себе самооценку.
Я желаю вам приятного путешествия и успешного выполнения всех заданий.
Карточка путешественника ученика(цы) 6 класса
Самооценка. Критерий оценивания:«3» — 12 – 17 баллов, «4» — 18 – 23 балла, «5» — от 24 баллов
2. Известно, что каждый путешественник должен быть смелым, ловким, находчивым. Проверим, насколько хорошо вы подготовились к путешествию. Я предлагаю вам первое испытание – «найди ошибку». Если вы считаете, что пример решён, верно, то в свою карточку на этапе «разминка» поставьте знак «+», если неверно – знак «-».
Внимание!
1) +20 — 60 = 80 Все примеры проговариваются
2) – 0,2 + 0,4 = 0,2 учителем, в то время как дети
3) – 0,3 ∙ ( 0,2) = 0,06 работают самостоятельно.
4) (-) + (-) = — 1
5) 0 ∙ () =
6) – 3,5 – (-2) = — 1,5
А теперь, ребята, поменяйтесь карточками. Сейчас мы будем проверять и исправлять. Проверьте, если ваш товарищ правильно ответил на вопрос, то его ответ вы обводите в кружок. А теперь подсчитайте, сколько верных ответов у вашего соседа и поставьте в его карточку общее количество баллов за разминку. (Мах 6)
3. Ни одно путешествие не обходится без приключений. В жизни каждого человека есть моменты, когда необходимо принять быстрое и правильное решение. Сейчас мы проверим вашу сообразительность в ходе выполнения самостоятельной устной работы «100 секунд». Перед вами 5 заданий, на выполнение каждого из которых отводится 20 секунд.
Самостоятельная работа в городе «Знаек» — 100 секунд.
1. -100,…,100. Ученик записал все целые числа от – 100 до 100 включительно. Потом их пересчитал, и у него получилось 200. А у вас?
2. + □ + □ = — 7. Даны три числа, два из них противоположные.
Найдите третье число, если их сумма равна «-7».
3. – 5 – ( ) = 5. Найдите число, которое надо вычесть из « -5», чтобы получилось 5.
4. (- 1) ∙ … ∙ ( -5). Перемножим все целые числа от «-1» до «-5» включительно. Будет ли полученное число больше 50?
5. (-11) (-3). Между данными числами поставь такой знак действия, чтобы в результате получилось наибольшее возможное число.
А теперь, ребята, выполним проверку. (Фронтальный опрос с объяснением решения). Поставьте в свою карточку общее количество баллов за эту работу. (Мах 6)
4. Давайте вспомним правила умножения чисел. (Формулируются правила умножения).
Что ж, молодцы! Но мы не сможем продолжить путешествие, не найдя корни корни уравнений.
а) — 3∙ х = 12 б) – 6 ∙ х = — 24
х= 12 : (-3) — 6 ∙ 4 = — 24
х=-4 х=-24: (-6)
3. Сделаем вывод: — при делении чисел с разными знаками, в результате получается отрицательное число;
— при делении отрицательных чисел – результат положительный.
Из истории. Мнемоническое запоминание состоит из четырёх этапов: кодирование в образы, запоминание (соединение двух образов), запоминание последовательности, закрепление в памяти. Мнемотехника применяется для запоминания незапоминаемой информации.
И ещё, ребята, помните, что при делении 0:а =0, где ане равно 0; на 0 делить нельзя!
5. А мы отправляемся дальше. Данное задание оценивается в 1 балл. Сборник задач 152 (по вариантам)
6. Путешествие продолжается в городе «Мудрецов». Вам необходимо
выбрать для решения одно из трёх уравнений, которые выделены разным цветом. Вы сами определяете уровень сложности. Если вы верно решите 1е уравнение (в синей рамке), то заработаете 1 балл, если вы верно решите 2е уравнение (в зелёной рамке), то 2 балла, а 3е уравнение (в красной рамке) – 3 балла. Удачи.
Город «Мудрецов»
Реши уравнение (вариант 1)
Х= 52: (- 4)Х= — 13
х = — 106,4 : ( — 14)
х = 7,6
Реши уравнение (вариант 2)
Х= — 42 : 3Х= — 14
х = — 180,6 : ( — 42)
х = 4,3
7. Разминка
8. Город «Мастеров». Но попасть туда мы сможем, если отгадаем код замка, который висит на воротах этого города. Я загадаю вам три загадки-вопроса, к каждому из которых предлагается три варианта ответов. Вы должны выбрать один из них и показать мне номер с соответствующей цифрой 1; 2 или 3.
Будьте внимательны и осторожны: найдите два числа, если известно, что
А) их произведение равно 10, а сумма 7
1) 1 и 10 2) – 5 и – 2 3) 5 и 2
Б) их произведение равно 12, а сумма – 7
1) – 4 и – 3 2) 4 и 3 3) – 2 и – 6
В) их произведение равно – 6, а сумма 1
1) – 3 и 2 2) 3 и – 2 3) 3 и 2.
( На доске появляется код 312)
(Мах 3)
9. Распахнулись двери города. А там праздник: все показывают своё мастерство. Давайте и мы покажем, что умеем. Я предлагаю вам сыграть в игру «ключевое слово». Решив все примеры своего варианта ( I, II или III) и используя соответствие число-буква, записанное в таблице, вы прочитаете слово, которое входит в состав девиза жителей города «Мастеров».
Итак, за работу
Зачёт в городе «Мастеров» — ключевое слово.
1 ряд
1) ( 4 – 8) : 4 =
2) 24 : ( 8 – 11) =
3) — 38/7 + 5 =
4) ( – 2 – 3) ∙ 5 =
5) – 32 : ( 12 – 8) =
2 ряд
1) – 60 : 10 + 9 =
2) 40 : (9 – 14) =
3) 12,4 : ( -4) – 2 =
4) – 26 ∙ (6 – 2) =
5) 3 ∙ ( — 28 + 18) =
6) 48 : ( — 2 – 4) =
3 ряд
1) 12,48 : ( — 2) + 2 =
2) – 5 ∙ ( — 18 + 6) =
3) – 12 ∙ ( 5 – 9) =
4) – 12 ∙ ( — 15 + 10) =
5) 12,2 : ( — 2) + 1=
6) 56 : ( — 3 – 4) =
Выясняется, какое ключевое слово получилось у каждого варианта. Поставьте в свою карточку общее количество баллов этого этапа урока.
(Мах 6)
10. Это выражение французского писателя Анатоля Франса и есть девиз жителей города «Мастеров» — «Учиться можно только весело». Но у этой фразы есть продолжение: «Чтобы переваривать знания, поглощать их надо с аппетитом». Я думаю, вы так всегда и делаете. И ваши знания помогли вам в сегодняшнем путешествии по стране «Действий с рациональными числами». Мне, как экскурсоводу, было приятно путешествовать вместе с вами, и я хочу каждого из вас похвалить за хорошую работу на уроке. Пришло время подведения итогов. Подсчитайте, пожалуйста, общее количество баллов и поставьте себе самооценку, используя критерий оценивания:
«5» — от 24 баллов
«4» — от 18 до 23 баллов
«3» — от 12 до 17 баллов.
Какова была цель нашего урока?
Что повторили?
Ребята, а теперь дайте оценку нашему уроку. Вам понравилось?
Конечно, тайны математики
Не все открыли мы пока,
Но вот о числах отрицательных
Расскажем всё наверняка!
11. Д/з: к следующему уроку я прошу вас нарисовать рисунки нашего путешествия, написать сказки, стихи об отрицательных и положительных числах и действий с ними, составить кроссворды.
infourok.ru
Jpeg в excel: Как конвертировать файлы Excel в формат JPEG
//Как вытащить картинку из excel
Извлечение изображения из документа Microsoft Excel
Смотрите также правой кнопкой сохранить *.JPG редактор: сделай print screen эту тему. Может доволен, но есть из первого поста не нужно править сохраните документ как файл и сохранить на первый взгляд у меня нет?После этого открываем«Файл» клавишДля того чтобы скопироватьПри работе с файлами как изображение!RekDehbra
и вставь в еще и замечание одна беда, он файлов не находит. в редакторе
Извлечение картинок
HTML-страницу полностью. В нажатием кнопки. Можно не поняла что Кто знает, напишитеПроводник Windows.Ctrl+V изображение, прежде всего Excel бывают неИгорь башмет: Теряет качество: если перетаскиванием на paint повесить за нарушение
Способ 1: копирование
экспортирует картинки вЗЫЗЫ: В файл-примерcherkas этом случае Ворд просто скопировать код
- там за способ, пожалуйста как!или любой другойВ открывшемся окне щелкаем. В его нужно выделить. только случаи, когда: Тупо скопировать иRemontir.Pro рабочий стол компMbard п 5q Правил том размере в можете засунуть любую: Здравствуйте уважаемые знатоки!
создаст в месте в свою книгу т к самЮрий М файловый менеджер и по пунктуPaint Для этого кликаем нужно вставить изображение вставить в word
: Да, сохранить как вам ничего не: правая кнопка на форума. Если желаете каком они сжаты картинку (предварительно сжав
- Помогите решить проблему. сохранения HTML-страницу и в стандартный модуль. макрос не увидела: Поищите на сайте переходим в директорию,«Сохранить как», кроме этого, можно по нему один в документ, но или paint и веб-страницу вполне себе предлагает значит через картинку та будет скорее получить ответ в прайсе. Подскажите ее до минимальных Есть прайс лист, отдельную папку с Немного теории проRadioalex Игоря (EducatedFool) в которой сохранили, который находится в нажать на кнопку
- раз левой кнопкой и обратные ситуации, там обработать. О. работает! Спасибо принт скрин можно… сохранить как, или на свой вопрос,
пожалуйста можно ли размеров). в котором прикреплены файлами к этой макросы и модули:: В экселе -Rustem документ. В этой
Способ 2: массовое извлечение изображений
левой его части.«Вставить» мыши. Затем выполняем когда рисунок, наоборот, сорри, не успелЕсть большой каталог вфотографируете монитор а просто перетащи на прочитайте Правила и как то растянутьcherkas изображения товаров. Как странице. В нейINFINITY сохранить как -: Выделить, ПКМ, Копировать,
- директории должна образоватьсяПосле этого действия запускается, расположенную на ленте щелчок правой кнопкой нужно извлечь из
- последующий тест прочитать… excel файле, в потом в любом рабочий стол создайте свою тему.
- все картинки сразу: Для меня принципиальное можно автоматически вытянуть будут и ваши: веб-страница. Далее октрываете Вставить в Paint, папка, которая содержит окно сохранения документа. в блоке инструментов мыши по выделению, книги. Для достиженияТакже, копируешь картинку котором в каждой граф редакторе вырезаете…-=Андрей=-Skiper alexandrovich как в приложении, значение имеют названия эти фотографии в фотографии. Причём еслиThe_Prist, папку картинка.files -
- Сохранить Прикрепленные файлы наименование документа. Именно Нам следует перейти«Буфер обмена» тем самым вызывая данной цели существует за картинкой.. Если строчке записан товарNajeepe: Изучи все настройки: копируй и вставь что бы они фотографий, так как отдельную папку, с фото в файл
- пока на практике там будут Ваши Безымянный.png (37.45 КБ) в этой папке в ту директорию. контекстное меню. В два способа. Каждый я правильно понял. и есть и: Открой Фотошоп MsExcel и будет в пэинте
- занимали только одну в последствии они присвоением каждой фотографии ворда поместили большое, не попробовала, но рисунки в PNG. Юрий М и содержатся изображения. на жестком диске,После этого картинка будет
появившемся списке выбираем из них является_Рыжий_ к нему изображение,В Экселе левой тебе счастье.Артем чумак строку но по будут загружаться в имени соответствующему артикулу а потом его
прочитав источники надеюсь
lumpics.ru>
как извлечь картинку?
Далее любым конвертером,: Наверное, требуется автоматизация:)) Переходим в неё. в которой желаем, вставлена в редактор пункт наиболее актуальным при: Зависит от того, в отдельном столбце. кнопкой мыши цепляешьС качал фотографии и: можно скриншот сделать. максимуму и конечно
интернет магазин и этого товара. там уменьшили, то
получится, как то имеющей пакетную обработку…RustemКак видим, картинки, которые чтобы разместилась папка
изображений и её«Копировать»
тех или иных насколько круто они Необходимо изображения вытащить
картинку и прямо пояснения к нимUt5az
в пропорции. привязываться к товарам.Прайсов много, по в паке могут так всё подробненько
INFINITY: В Paint сохранить были в документе с картинками. Поле можно сохранить в
. обстоятельствах. Давайте подробно туда вмонтированы. из excel файла тащишь в фотошоп и сохранил в: Скопировать в буферФайлы больше 100 Что бы не этому каждый раз
оказаться ДВЕ фотографии — как я: сохранила как веб, как .jpg Excel, представлены в«Имя файла» виде файла темМожно также после выделения рассмотрим каждый изЕсли просто вставлены и сохранить надальше сохраняешь как Excel, сейчас надо обмена и потом кб ссылка на было ошибки нужно делать это руками — та, что люблю действительно все картинкиEducatedFool
этой папке вможно оставить без способом, который доступен изображения перейти во них, чтобы вы на лист, то компьютер, давая им угодно вынять и обработать вставить в любой скачивание — http://yadi.
sk/d/jvnDh7RfB7F8p что бы имена уже порядком надоело. вы видели наспасибо огромное!!!!! тая есть в: если фотошопа у виде отдельных файлов. изменения, так как в выбранной программе. вкладку могли определить, какой можно щелкнуть по имена по порядку.
Пользователь удален
фотографии, но не графический редактор.
AndreTM картинок по какому Встречается, что изображение странице и исходник,Radioalex пнг или гиф меня нет? Теперь с ними для наших целейПреимущество данного способа заключается«Главная» из вариантов лучше снимку правой мышкой Пробовал сохранять как: Скопируйте изображение из
) но… фраза
могу . ОниEverless: Ну так а то уникальному параметру растянуто на несколько что гораздо интересней.: INFINITY, раз уГугла с Яндексом можно выполнять те это не важно. в том, что. Там на ленте применить в конкретном и выбрать пункт веб-страницу, но он Excel в буфер не сохраняются в: а можно поизгаляться кто вам запрещает совпадали с прайсом, товаров, тогда нужноВек чело Вас есть ексель,
Далее любым конвертером, имеющей тоже нет? же манипуляции, что А вот в вы сами можете в блоке инструментов
planetaexcel.
ru>Как вытащить и сохранить фотографию, вставленную в документ Word или Excel?
случае. Сохранить рисунок как.. дублирует изображения. Нашел обмена, затем вставьте
другом формате, а и сохранить документ обработать .Shapes в т.е. это должен соответствующее количество изображений: Мышкой перетащи на то вероятнее всего пакетную обработку…INFINITY и с обычными поле выбрать формат файла,«Буфер обмена»Скачать последнюю версиюЕсли такой вариант способ на сайте его из буфера этот формат невозможно в формате html. соответствии с параметрами быть или артикул, с именем-артикулом.
рабочий стол и оффис есть.мне не понятна(
: изображениями.
«Тип файла» в котором сохранитьщелкаем по пиктограмме Excel не проходит, делаете www. excel-vba .ru/chto-umeet-excel/kak-soxranit-kartinki-iz-lista-excel-v-kartinki-jpg/
на чистый лист нигде открыть.
Помогите, Там и папочка .Rows или .Cells? или макрос долженПрайс можно скачатьThinker Программы — майкрософт например что за
Юрий М,Вытащить картинки из файласледует выбрать значение картинку, из поддерживаемых«Копировать»Читайте также: скриншот, обрабатываете в , но не
Как вытащить рисунки? (Иное)
в любом графическом я мало в появится рядом, кудаcherkas найдя в строке/столбце здесь: выдели и вставь офис-средства макрософт - конвертер, он вСпасибо, посмотрю! Вы Excel не так«Веб-страница (*.htm; *.html)»
вариантов выбранного редактора.Как извлечь изображение из любом графическом редакторе, могу разобраться как редакторе и сохраните этом разбираюсь. все картиночки и: запрещает мне нехватка
картинку в какомтоhttps://disk.yandex.ua/public….%2BM%3D
Dieter
майкрософт офис микчер стандартном пакете майкрософт правы насчет автоматизации уж сложно, как. После того, как изображений.Существует и третий вариант, файла Microsoft Word
начиная со стандартного использовать VBA скрипты. полученное в любом
Angeloshka ссыплются) моих знаний… пустом столбце/строке внестиНа форум вставить: выдели (щелкни по менеджер. Закидуете в
есть? (у меня
INFINITY могло показаться на вышеуказанные настройки произведены,
Но, конечно, если изображений при котором послеГлавным критерием выбора конкретного Paint, обрезаете лишнее Подскажите, пожалуйста, как доступном формате.: Проще всего открытьЕсть файлик Microsoft ExcelMinerva76 ее имя, что не могу, так картинке) скопируй в эту прогу все винд7) немножечко поподробнее: первый взгляд. Это щелкаем по кнопке больше десятка, а выделения нужно нажать способа является тот и сохраняете, как использовать VBA скриптыМарина аверкина файл в Экселе, , там картинка: Доброй ночи, почему бы потом можно как даже одна
paint вставь и рисунки простым перетаскиванием.
напишите, пожалуйста!!!Rustem, можно сделать либо«Сохранить»
то и несколько на комбинацию клавиш факт, хотите ли JPEG или какой-нибудь другой: Копируете фотку в соxранить как веб-страницу
(фото) , как у меня съезжают было сделать привязку. строка прайса превышает сохрани в формате Затем — файлThe_Pristда, спасибо, я путем простого копирования. сотен, и ихCtrl+C вы вытащить одиночноеHeaven rice способ, как достать Excel и вставляете (htm), при этом его извлечь и
названия файлов?SkyPro 100 кБ. котором нужно — экспорт -: INFINITY, конвертер надо так и делаю, изображения, либо путемВозможно, при этом появится
всех нужно извлечь,. изображение или произвести
: Есть старый, проверенный изображения из файла. ее либо в все фото и
сохранить себе наЧитайте Правила форума.: cherkas, прошу прощения,KuklPГалина богомолова и указываете формат искать на просторах но у меня сохранения документа, как диалоговое окно, в то вышеуказанный способПосле этого запускаем любой массовое извлечение.
В способ, при наличииЗибин фотошоп либо в картинки сохранятся в комп? Эта тема закрыта но у меня: Погуляйте здесь, мож: правой кнопкой не в который необходимо Интернета. В офисexcelworld.ru>
Как «вытащить» картинку из документа Word или Excel, и сохранить как картинку в формате .jpg ???
десятки картинок, а веб-страницы, встроенными инструментами котором будет сообщаться,
представляется непрактичным. Для редактор изображений. Можно,
первом случае можно Power Point.: в Excel нажимаешь Paint отдельной папке (images).
ПошёлChe79 с вашим файлом что понравится: сохраняется? сохранить. Все… подобное не встроено. то и сотни…
Как извлечь картинку из документа Excel ?
Эксель. что файл может этих целей существует например, воспользоваться стандартной удовлетвориться банальным копированием,Копируешь картинку в
Alt+F11 — кликаешьА далее «Сохранить И с ними: Правой кнопкой, копировать
: получилось использовать даннуюhttp://excelvba.
ru/code/picturesАндрейINFINITY Да и в нужен какой тоАвтор: Максим Тютюшев иметь возможности, несовместимые возможность применить конвертацию программой а вот во
экселе, вставляешь в на «ЭтаКнига» - как» и выбираете уже можнго делать и вставляй вMinerva76
надстройку.cherkas: После открытия документа: ууу !!! )))
Подскажите, как можно вынять фото из excel, или сохранить её в другом формате.
Windows тоже. Пакетная быстрый способINFINITY с форматом документа Excel вPaint втором придется применить Power Point и копируешь макрос в нужный формат. что угодно. Тот Пэйнт или Ворлд., вангую дальнейшее развитие
Нужны артикулы? -: Вам спасибо! Word или Excel Получилось ❗ :!: смена формата достигаетсяINFINITY: Доброго времени всем!«Веб-страница» формат HTML. При, которая встроена в процедуру конвертации, чтобы затем уже правой новое окно.
..Член же алгоритм годитсяМаксим трифонов событий по Вашему
удалите все столбцы,Может кто нибудь ищи картинки в ❗ и как
через специфические приложения.: В excel есть, и при конвертации этом все изображения Windows. Производим вставку
не терять время кнопкой мыши намакрос будет доступен: Открой Excel, нажми и для ворд
: если обычным копипастом вопросу. Придёт модератор, кроме артикулов и еще, что нибудь
папке C:\Documents and легко и просто,Вот ссылка -EducatedFool, картинки, нужно их они будут утеряны. автоматически будут сохранены в эту программу на извлечении каждого картинке и «Сохранить через Alt+F8… правую кнопочку КОПИРОВАТЬ,
Andrey не получится то попросит прочитать правила изображений и запустите подскажет? Settings\Uzer\Local Settings\Temp
класс!!! Спасибо большое!!!!!!!!!сохраняет именно весли вы думаете извлечь и как Нам следует согласиться, в отдельной папке любым из тех рисунка по отдельности.
как».Церий открой редактор картинок: копируешь в exсel «кривой» выход такой: форума, задать вопрос экспорт.
SkyProСерега fackПринт скрин и править JPEG.
Как вытащить изображения из файла Excel и сохранить их на компьютер?
что я не то превратить их нажав на кнопку на жестком диске способов, которые вНо, прежде всего, давайтеПочему-то в эксель: А просто сделать (в Windows есть и встовляешь в открываешь файл, жмакаешь в новой теме,cherkas: А чем вам: есть программа Фастон в редакторе дюжеКод можно скачать пыталась что-то сама в формат jpg…«OK» компьютера. ней доступен. В все-таки рассмотрим, как досе не догадались скриншот никак?
Paint) и нажми короле клавишу принт скрин, приложить файл, подробнее: Разобрался, Огромнейшее спасибо! это решение не
каптур очень удобная. муторно. Наверняка есть вместе с файлом сделать или найти, вот такие как
, так как единственнойОткрываем документ Excel, содержащий большинстве вариантов можно произвести извлечение изображения прикрутить такую простую
Tim вставить на рабочемДаня вставляешь в редактор описать какие названияcherkas понравилось?
Просто выделишь участок какой-то способ. к статье иКак вытащить фотографии jpeg из Excel и сохранить как файл jpeg
ошибаетесь, просто безрезультативно. во вложении. Это целью является извлечение изображения. Переходим во
воспользоваться универсальным способом из файла методом фишку, о которой: а в ехсели столе редактора, потом: Скопировать и вставить
пэйнт и сохраняешь… каких файлов куда: Снова здравствуйте. Пользуюсьhttp://excelvba.ru/code/ExportPictures картинки какой тебеЛеонид чуйков просто скопировать все Вашу ссылочку посмотрю-поразбираю, возможно, если фотошопа картинок. вкладку и набрать комбинацию
копирования. бредит просветлённый товарищ. что ли не сохрани в формате в любой графическийТатьяна белякова съезжают и закроет
макросом и оченьЗЫ: По ссылке нужен и все.: В крайнем случае листы в скачанный спасибо большое, так
Как вставить файл jpg в excel. Вставка изображения в Microsoft Excel
Иногда, кроме числовых и текстовых данных в таблицу требуется вставить какой-либо рисунок. Принцип добавления изображений в таблицу Excel схожий с тем, что используется в Word. Да это и не удивительно, ведь большинство продуктов компании Microsoft похожи между собой с точки зрения юзибалити.Для того чтобы добавить изображение в таблицу Excel необходимо:
1. Откройте вкладку «Вставка » и отыщите команду «Рисунок ». Далее щелкните по ней.
2.Откроется диалоговое окно «Выбор рисунка ». Отыщите необходимое изображение и нажмите кнопку «Вставить ».
3. После чего появится контекстная вкладка «Формат». Используя инструменты, которые находятся в этой вкладке, вы можете отредактировать ваше изображение. В «Формате» присутствует настройка яркости, контрастности картинки, изменение его размера, добавление рамок и эффектов (тень, отражение, свечение и т.д.), выравнивание картинки, обрезка и поворот, а также многие другие инструменты.
Кроме этого, многие из вышеперечисленных инструментов имеют также настройки дополнительных параметров.В общем, в Microsoft Excel 2007 картинку можно изменить так, как это не позволят многие бесплатные графические редакторы.
Хотелось бы также отметить, что загружаемое вами изображение в таблицу Excel может быть слишком большим. Чтобы его уменьшить просто кликните дважды на картинку, затем подведите курсор мыши к её краю, зажмите левую кнопку мыши (когда появятся стрелочки) и перетащите курсор. Эта операция проводится аналогично, как в и Word (подробнее читайте тут).
Дата: 26 января 2017 Категория:Привет, друзья. Думаю, каждый из Вас хочет знать, как вставить в Эксель картинки. Действительно, часто на листе Excel изображения несут важную дополнительную информацию. Например, фото товара, карта проезда, логотип поставщика и т.д.
Чтобы вставить на лист Эксель изображение с жесткого диска компьютера, выполните ленточную команду: Вставка – Иллюстрации – Рисунки . Откроется окно проводника, в котором найдите и выделите нужный файл, кликните «вставить».
Картинка сразу появится на активном листе.В некоторых случаях удобно вставить картинку из интернета . Выполните на ленте Вставка – Иллюстрации – Изображения из интернета .
Программа позволяет загрузить рисунки из «облачного» сервиса OneDrive, подключенных аккаунтов социальных сетей, или найти нужное изображение с помощью поисковой системы Bing. Выберите подходящий вариант, установите галочки на загружаемых изображениях и нажмите «Вставить». Картинки загрузятся из источника и появятся на листе.
При вставке картинки из поиска Bing, Вам учтиво напомнят о соблюдении авторских прав.
Так же, можно вставить изображение копированием. Если в каком-то из открытых приложений есть изображение, скопируйте его (например, нажав Ctrl+C ). Вернитесь в Эксель и нажмите Ctr+V , рисунок будет вставлен.
В Майкрософт Эксель нового поколения появилась интересная возможность – вставка копии экрана. Например, нужно добавить скриншот какой-то Вашей разработки.
Откройте нужное окно, потом перейдите в Эксель и нажмите Вставка – Иллюстрации – Сделать снимок экрана
. Эксель отобразит миниатюры всех открытых окон, выберите нужное. На листе сразу же появится копия этого окна.А начиная с Excel 2013 можно вставить только нужную часть окна. Для этого выберите Вставка – Иллюстрации – Сделать снимок экрана – Вырезка экрана . Программа отобразит вставляемое окно с рамкой обрезки. После выделения нужного участка, картинка появится на листе.
Когда вы вставили рисунок на лист, можно его немного приукрасить. Кликните по нему, чтобы выделить. На ленте появится новая вкладка: Работа с рисунками – Формат .
Первое, что можно сделать – изменить стиль. Программа предложит Вам несколько готовых макетов оформления рисунка. Выпадающий список стилей находится в блоке «Стили рисунков».
Если ни один из них Вам не подходит, задайте собственный с помощью ленточных кнопок «Граница рисунка», «Эффекты для рисунка», «Макет рисунка». Если использовать опции «Макет рисунка», он преобразуется в и на ленте появятся еще две вкладки для его настройки.
Отличный набор инструментов для форматирования рисунков Вы найдете на ленте Работа с рисунками – Формат – Изменение . Здесь можно удалить фон с рисунка, наложить художественные фильтры, произвести коррекцию и настроить цветовые тона. Функционал сопоставим с некоторыми графическими редакторами. К тому же, все делается очень просто, интуитивно понятно.
Очень полезная опция в этой группе – «Сжать рисунок ». Программа оптимизирует рисунки для снижения объема файла и ускорения его загрузки.
Как и для остальных графических объектов ( , SmartArt, ), присутствует группа команд «Упорядочение». Эти команды помогут выровнять вставленные картинки по вертикали и горизонтали, равномерно их распределить, повернуть, сгруппировать и разгруппировать.
В блоке «Размер» задайте точные размеры рисунка, если это необходимо.
Ну а чтобы выполнить «тонкую настройку» всех возможных параметров объекта, кликните по нему и нажмите Ctrl+1 . В открывшемся диалоговом окне будет полный перечень всех настроек картинки: цвет, контур, формата текста, тени, яркость, контрастность, разрешение выводить на печать, привязка к ячейкам и многое другое.
Описание всех настроек заняло сделало бы статью в несколько раз длиннее, поэтому оставляю их Вам на самостоятельное изучение.Пожалуй, по этой теме все. Из графических объектов Эксель нам осталось изучить . Если Вы студент, или преподаватель точных наук – не пропустите этот небольшой пост, он именно для Вас! До новых встреч!
Зачастую, при работе с табличными данными или прайсами возникает потребность в импорте изображений или картинок товара. Но как сделать так, чтобы картинка корректно отображалась и имела красивый внешний вид согласно таблице?
Давайте рассмотрим, как же можно вставить изображение в Excel несколькими способами.
Для того чтобы вставить изображение в рабочую область книги, его необходимо загрузить себе на компьютер либо скопировать его в буфер обмена. Стоит учесть, что, как и в других табличных редакторах, вставка изображения идет без привязки к определенному адресу ячейки, а просто поверх всего в выбранной позиции.
Вставить изображение можно несколькими способами.
Самым простым способом является переход во вкладку «Вставка» — «Рисунок». Это позволяет открыть проводник, где уже непосредственно пользователь укажет адрес расположения картинки на компьютере.После этого необходимо нажать на кнопку «Вставить».
Изображение будет импортировано в документ, при этом сохраняя свое разрешение и не привязываясь ни к одной ячейке – картинка лежит поверх всех данных. При вставке изображения, для большего удобства, в панели задач автоматически открывает мастер по работе с изображениями.Чтобы изменить рисунок или подогнать его по размерам, изменить его свойства, необходимо выделить его и открыть контекстное меню, где выбрать «Размеры и свойства».
В появившемся диалоговом окне формата рисунка можно изменять различные свойства – накладывать тени, выполнять заливку, изменять размеры, свойства, поворачивать изображение, менять его цвет и много-много другое.
Для более быстрого доступа к редактору изображений, в Excel, при импорте изображения, автоматически открывается меню работы с изображениями, где эти же свойства и еще несколько дополнительных готовы к работе по требованию пользователя.
Для того чтобы импортированное изображение красиво смотрелось в документе, его размеры нужно привести к общему виду и вставить непосредственно в ячейку.
Это можно сделать посредством через контекстное меню, в диалоговом окне «Размеры и свойства» либо просто вручную изменить границы самого изображения.
Зачастую, требуется сделать так, чтобы картинка была непосредственно в самой ячейке, то есть стала единым целым с таблицей. Если в прошлом варианте, изображение, при перетаскивании таблицы осталось бы на своем месте, в этом случае, оно будет в самой ячейке, как и другие значения и данные.
Закрепить изображение в ячейке можно несколькими способами.1. Защитить лист от редактирования.
Для начала нужно подогнать размер изображения под размер выбранной ячейки. После манипуляций необходимо открыть контекстное меню изображения и выбрать в нем «Формат ячеек».
В появившемся диалоговом окне формата ячеек необходимо перейти во вкладку «Защита» и поставить галочку напротив поля «Защищаемая ячейка».
Далее нужно нажать «Ок».Эта процедура позволит заблокировать изображение в ячейке, его нельзя будет изменять или редактировать до отмены защиты. Все остальные диапазоны доступны для пользователя в стандартном режиме.
2. Режим разработчика.
Привязать импортированное изображение к ячейке можно также с помощью режима разработчика и меню «ActiveX».
В стандартном варианте программы режим разработчика отключен, для работы с объектами, необходимо включить режим. Для этого откроем меню «Файл» — «Параметры» и в настройках ленты поставим галочку напротив меню «Режим разработчика».Добрый день!
Совсем недавно моему коллеге поручили сделать презентацию доклада, а в любом отчете много таблиц и картинок. Поэтому ко мне он подошел с закономерным вопросом: «Как в Excel вставить картинку?». Это сделать достаточно просто и легко, а также очень полезно, т.к. 80% информации успешнее усваивается с помощью визуальных образов. Для презентаций, прайсов, базы данных, эта возможность станет очень полезной и необходимой.
Я думаю, что достаточно много пользователей хотели бы визуализировать свою информацию, поэтому я хочу, с вами поделится своими знаниями. Поместить изображение в таблицу можно несколькими способами и на каждом из них будем останавливаться подробнее:
Простая вставка рисунка
В панели инструментов, во вкладке «Вставка» находится целый блок «Иллюстрации» с помощью которых вы можете добавлять изображения к себе в файл. В дальнейшем, при активизации картинки появляться дополнительная вкладка работы с рисунками «Формат». С ее помощью вы сможете отредактировать свое изображение (на примере, я показал, как производится обрезка ненужной части фото). Это конечно не фотошоп, но с картинкой можно хорошо поработать.
Также можете воспользоваться контекстным меню (клик на картинке правой кнопкой мыши) и с предложенного варианта выбрать пункт «Размер и свойства…» и в открывшемся окне «Формат рисунка» есть очень много полезных настроечек.Поместить изображение в примечание
Иногда возникает необходимость, что бы во время работы в примечаниях содержалась картинка, это, к примеру, фотография товара в прайсах.
Для начала нам необходимо собственно создать само . Нужно выбрать ячейку, где оно должно содержатся, установить там курсор, вызвать контекстное меню и выбрать пункт «Вставить примечание». После в ячейке выбираем пункт «Изменить примечание» и в открывшемся примечании нажимаем на рамочку правой кнопкой мыши, вызываем контекстное меню. В этом меню выбираете пункт «Формат примечания». Переходите на вкладку «Цвета и линии». В разделе «Заливка» в пункте «цвет» в выпадающем меню выбираем «Способы заливки…».
В открывшимся окне нужно выбрать закладку «Рисунок», следующим шагом нажимаете одноименную кнопку и в проводнике выбираете картинку для вставки в примечание и нажимаете «ОК». Как результат теперь в примечание размещается картинка.Вставка картинки в ячейку
В этой главе рассмотрим, как нужно вместить картинку в ячейку и привязать к ее границам. Для начала нужно установить курсор на ячейку, в которую будете вставлять графическое изображение. Потом выбираете изображение для ячейки, нажимаете вкладку «Вставка», жмете пиктограммку «Рисунок» (если вы хотите вставить свое изображение) или «Картинка» (вы выбираете из базы предустановленных картинок или найденных в сети), указываете файл и нажимаете «ОК».
Подгоните размеры картинки под границы ячеек или, наоборот, по необходимости. Когда картинка стоит в ячейке, вызываете контекстное меню, нажав на изображение ПКМ. В списке выбираете пункт «Размер и свойства». В окне «Формат рисунка» в разделе «Свойства» необходимо установить значок возле пункта «перемещать, и изменять объект вместе с ячейками» и нажимаете «Закрыть».
Теперь настраивая ширину столбиков или высоту строк, ваша картинка также будет трансформироваться в размерах.Добавление изображения с помощью макросов
Последним вариантом по внедрению изображений станет работа с . С их помощью появляется возможность автоматизировать этот процесс и значительно его упростить. Описывать я его детально не буду, так как много макросов предоставлено на ваше усмотрение в интернете. К примеру, можете воспользоваться материалами статьи «Вставка картинок и изображений в ячейки листа Excel» которая размещена на хорошем сайте, где есть много чего о VBA.
Ну, вот я описал все способы как в Excel вставить картинку, я очень надеюсь, что мой материал вам помог.
Буду признателен вашим лайкам и репосту в социальные сети, если статья вам понравилась, а ваши замечания жду в комментариях!До встречи на страницах !
Если проблему можно решить за деньги, то это не проблема, это расходы.
Еврейская мудростьНекоторые задачи, выполняемые в таблицах, требуют установки в них различных изображений или фото. Программа Excel имеет инструменты, которые позволяют произвести подобную вставку. Давайте разберемся, как это сделать.
Для того, чтобы вставить изображение в таблицу Эксель, оно сначала должно быть загружено на жесткий диск компьютера или подключенный к нему съёмный носитель. Очень важной особенностью вставки рисунка является то, что он по умолчанию не привязывается к конкретной ячейке, а просто размещается в выбранной области листа.
Вставка изображения на лист
Сначала выясним, как вставить рисунок на лист, а уже потом разберемся, как прикрепить картинку к конкретной ячейке.
После этого рисунок вставляется на лист. Но, как и говорилось ранее, он просто лежит на листе и фактически ни с одной ячейкой не связан.
Редактирование изображения
Теперь нужно отредактировать картинку, придать ей соответствующие формы и размер.
Прикрепление картинки
Но, даже после того, как изображение стало меньше ячейки и было помещено в неё, все равно оно осталось неприкрепленным. То есть, если мы, например, произведем сортировку или другой вид упорядочивания данных, то ячейки поменяются местами, а рисунок останется все на том же месте листа. Но, в Excel все-таки существуют некоторые способы прикрепления картинки. Рассмотрим их далее.
Способ 1: защита листа
Одним из способов прикрепить изображение является применение защиты листа от изменений.
После этих действий диапазоны, в которых находятся изображения, защищены от изменений, то есть, картинки к ним привязаны. В этих ячейках нельзя будет производить никаких изменений до снятия защиты.
В других диапазонах листа, как и прежде, можно делать любые изменения и сохранять их. В то же время, теперь даже если вы решите провести сортировку данных, то картинка уже никуда не денется с той ячейки, в которой находится.Способ 2: вставка изображения в примечание
Также можно привязать рисунок, вставив его в примечание.
После выполнения всех вышеперечисленных действий, изображение не только будет вставлено в примечание ячейки, но и привязано к ней. Конечно, данный способ подходит не всем, так как вставка в примечание налагает некоторые ограничения.
Способ 3: режим разработчика
Привязать изображения к ячейке можно также через режим разработчика. Проблема состоит в том, что по умолчанию режим разработчика не активирован. Так что, прежде всего, нам нужно будет включить его.
После выполнения вышеперечисленных действий картинка будет привязано к сетке и выбранной ячейке.
Как видим, в программе Эксель имеется несколько способов вставить изображение в ячейку и привязать его к ней.
Конечно, способ со вставкой в примечание подойдет далеко не всем пользователям. А вот два остальных варианта довольно универсальны и каждый сам должен определиться, какой из них для него удобнее и максимально соответствует целям вставки.Excel VBA вставить изображение jpeg в диаграмму
Я использую excel 2013. Это код, который я пробовал, и он не работает. Любые предложения о том, как написать VBA, чтобы либо использовать файл jpeg для заполнения диаграммы, либо картинку, которую я уже имею в виде фигуры на листе под названием «picture 6» спасибо!!!
vba excelSub PastePic() ActiveSheet.ChartObjects("MainChart").Activate ActiveChart.ChartArea.Format.Fill.UserPicture("S:\CAT\Everyone\Analyse\Kundeplattform\square.jpeg") End Sub
Поделиться Источник Laurie Blome 18 августа 2014 в 12:553 ответа
1Ваш код выглядит прекрасно и работает для меня.
Похоже, вы извлекаете картинку из своей сети. Попробуйте переместить изображение на диск
C:на локальном компьютере (например,C:\square.jpeg) и повторите попытку макроса, возможно, это проблема с сетью.Поделиться StoriKnow 18 августа 2014 в 13:31
0Если это сетевой путь, который создает проблему, то вы можете рассмотреть вариант 1, который основан на ответе Сэма. В противном случае используйте вариант 2, Если вы хотите использовать форму «picture 6».
OPTION 1)
Скопируйте его на локальный диск, как предложил Сэм в своем ответе. Вы можете либо вручную скопировать его, либо сделать это с помощью кода.
Этот код скопирует изображение во временный каталог пользователя из сетевого пути, а затем использует его в качестве образа.
UNTESTED
Const sPath As String = "S:\blah\blah\Sample. jpg"
Private Declare Function GetTempPath Lib "kernel32" Alias "GetTempPathA" _
(ByVal nBufferLength As Long, ByVal lpBuffer As String) As Long
Private Const MAX_PATH As Long = 260
Sub Sample()
Dim TempFile As String
TempFile = TempPath & "Sample.Jpg"
FileCopy sPath, TempFile
DoEvents
ActiveSheet.ChartObjects("MainChart").Activate
ActiveChart.ChartArea.Format.Fill.UserPicture (TempFile)
Kill TempFile
End Sub
Function TempPath() As String
TempPath = String$(MAX_PATH, Chr$(0))
GetTempPath MAX_PATH, TempPath
TempPath = Replace(TempPath, Chr$(0), "")
End Function
OPTION 2)
Используя форму
picture 6, которая уже есть в вашем файле Excel.Вы можете использовать пример, который я показал HERE , который использует
.CopyPictureи функцию PastePicture Стивена БулленаПоделиться Siddharth Rout 18 августа 2014 в 13:28
0Я смог решить аналогичную проблему, используя FQPN для пути к файлу.
Поэтому вместо filePath = "s:\path\file.png"я использовалfilePath = "\\server\share\path\file.png".Поделиться Billdr 16 августа 2017 в 16:20
- Вставить диаграмму Excel в word, VBA
Я использую Windows XP SP 3. Я написал код для вставки нескольких диаграмм из Excel 2003 в Word 2003. Dim word As Object Dim doc As Object On Error Resume Next Set word = GetObject(, word.application) ‘gives error 429 if Word is not open If Err = 429 Then Set word = CreateObject(word.application)…
- Создайте диаграмму, используя данные RecordSet в коде VBA Excel
Я получаю данные из Access, копирую в лист Excel и создаю диаграмму с использованием Excel VBA. Данные выглядят следующим образом: И диаграмма выглядит так: Я хочу показать все транзакции в листе, но в диаграмме я хочу показать сумму дат. Например, на 19/08/2015 общая сумма 2695, 20/08/2015 общая.
..
Похожие вопросы:
Как экспортировать диаграмму JavaScript в файл Excel (HighCharts)Я должен экспортировать диаграмму Javascript (HighCharts) в файл excel; диаграмма была отрисована в div, но excel не отрисовывает содержимое html+css, которое генерирует javascript, а только текст…
Excel VBA Изображение Нижнего КолонтитулаЕсть ли способ использовать код Excel-VBA для того, чтобы сделать объект изображения на листе, чтобы вставить его в качестве нижнего колонтитула изображения. Я попытался сделать это, создав объект…
как вставить изображение jpeg в лист excel в unixЯ могу вставить bmp-изображения с помощью команды insert_bitmap модуля xlwt в python, используя следующий код: import xlwt from PIL import Image book = xlwt.Workbook() sheet3 =…
VBA: вставить диаграмму с другим именемЯ использую VBA для копирования и вставки диаграммы.
ActiveSheet.ChartObjects(Chart1).Activate ActiveChart.ChartArea.Copy ActiveSheet.PasteSpecial Format:=Microsoft Office Drawing Object, Link:= _…
Вставить изображение от VBA до EXCEL в специальном случае (=INCORPORER(«Forms.Image.1″;»»)Я вставляю Изображение от VBA до Excel в ячейку F31. With Worksheets(CheckListIndustrialisation).Pictures.Insert(image) ‘.Top = [F31].Top ‘.Left = [F31].Left ‘.Width = [F31].Width ‘.Height =…
Вставить диаграмму Excel в word, VBAЯ использую Windows XP SP 3. Я написал код для вставки нескольких диаграмм из Excel 2003 в Word 2003. Dim word As Object Dim doc As Object On Error Resume Next Set word = GetObject(,…
Создайте диаграмму, используя данные RecordSet в коде VBA ExcelЯ получаю данные из Access, копирую в лист Excel и создаю диаграмму с использованием Excel VBA. Данные выглядят следующим образом: И диаграмма выглядит так: Я хочу показать все транзакции в листе,.
..
Можете ли вы включить Jpeg или любое другое изображение в форму excelне уверен, что это возможно, можете ли вы добавить jpeg или другое изображение в форму, созданную в разделе vba в excel? Если да, то кто-нибудь знает, как это сделать…
Как вставить изображение с рабочего стола в MS Paint с помощью VBA excelЯ не знаю, как скопировать изображение с рабочего стола и вставить его в MS paint с помощью макроса VBA EXCEL. пожалуйста, помогите в заполнении кода ниже. Суб PasteImage() Shell = (MSPAINT) Dim…
Как скопировать диапазон Excel, включая диаграммы и графики, и вставить его в виде одного изображения?Используя VBA, я могу скопировать и вставить диапазон Excel в outlook как изображение или как таблицу HTML. Я также могу скопировать и вставить одну диаграмму/график из Excel в Outlook в виде…
Экспорт изображений из файла excel в jpg с помощью VBA
У меня есть файл Excel, который включает в себя изображения в столбце B, и я хочу экспортировать их в несколько файлов как .
jpg (или любой другой формат файла изображений). Имя файла должно быть сгенерировано из текста в столбце А. Я попробовал следовать макро VBA:Private Sub CommandButton1_Click() Dim oTxt As Object For Each cell In Ark1.Range("A1:A" & Ark1.UsedRange.Rows.Count) ' you can change the sheet1 to your own choice saveText = cell.Text Open "H:\Webshop_Zpider\Strukturbildene\" & saveText & ".jpg" For Output As #1 Print #1, cell.Offset(0, 1).text Close #1 Next cell End SubВ результате он генерирует файлы (jpg) без какого-либо содержимого. Я предполагаю, что строка
Print #1, cell.Offset(0, 1).text.неверна. Я не знаю, во что мне нужно его превратить,cell.Offset(0, 1).pix?Кто-нибудь может мне помочь? Спасибо!
image excel vba export
Поделиться Источник KEK79 14 августа 2013 в 13:247 ответов
- чтение изображений и данных из файла excel с помощью poi
я знаю, как читать данные из excel xls/xlxs.
теперь мое требование заключается в том, что я должен читать изображения и данные из файла excel используя POI 3.8. можете вы, пожалуйста, руководство мне, как это сделать. чтение изображений и данных из одного файла excel с помощью poi…. Заранее… - XML экспорт с кодом Excel vba
Я хотел бы спросить, Можно ли каким-то образом включить некоторый код vba в файл XML? После экспорта моего файла excel в xml я его не вижу. Моя цель-создать excel с macros из xml.
12Если я правильно помню, вам нужно использовать свойство «Shapes» вашего листа.
Каждый объект формы имеет атрибуты TopLeftCell и BottomRightCell, которые сообщают вам положение изображения.
Вот фрагмент кода, который я использовал некоторое время назад, примерно адаптированный к вашим потребностям. Я не помню подробностей обо всех этих ChartObjects и тому подобном, но вот оно:
For Each oShape In ActiveSheet. Shapes
strImageName = ActiveSheet.Cells(oShape.TopLeftCell.Row, 1).Value
oShape.Select
'Picture format initialization
Selection.ShapeRange.PictureFormat.Contrast = 0.5: Selection.ShapeRange.PictureFormat.Brightness = 0.5: Selection.ShapeRange.PictureFormat.ColorType = msoPictureAutomatic: Selection.ShapeRange.PictureFormat.TransparentBackground = msoFalse: Selection.ShapeRange.Fill.Visible = msoFalse: Selection.ShapeRange.Line.Visible = msoFalse: Selection.ShapeRange.Rotation = 0#: Selection.ShapeRange.PictureFormat.CropLeft = 0#: Selection.ShapeRange.PictureFormat.CropRight = 0#: Selection.ShapeRange.PictureFormat.CropTop = 0#: Selection.ShapeRange.PictureFormat.CropBottom = 0#: Selection.ShapeRange.ScaleHeight 1#, msoTrue, msoScaleFromTopLeft: Selection.ShapeRange.ScaleWidth 1#, msoTrue, msoScaleFromTopLeft
'/Picture format initialization
Application.Selection.CopyPicture
Set oDia = ActiveSheet.ChartObjects.Add(0, 0, oShape.Width, oShape.Height)
Set oChartArea = oDia. Chart
oDia.Activate
With oChartArea
.ChartArea.Select
.Paste
.Export ("H:\Webshop_Zpider\Strukturbildene\" & strImageName & ".jpg")
End With
oDia.Delete 'oChartArea.Delete
Next
Поделиться Jean Robert 14 августа 2013 в 14:10
9Этот код:
Option Explicit Sub ExportMyPicture() Dim MyChart As String, MyPicture As String Dim PicWidth As Long, PicHeight As Long Application.ScreenUpdating = False On Error GoTo Finish MyPicture = Selection.Name With Selection PicHeight = .ShapeRange.Height PicWidth = .ShapeRange.Width End With Charts.Add ActiveChart.Location Where:=xlLocationAsObject, Name:="Sheet1" Selection.Border.LineStyle = 0 MyChart = Selection.Name & " " & Split(ActiveChart.Name, " ")(2) With ActiveSheet With . Shapes(MyChart)
.Width = PicWidth
.Height = PicHeight
End With
.Shapes(MyPicture).Copy
With ActiveChart
.ChartArea.Select
.Paste
End With
.ChartObjects(1).Chart.Export Filename:="MyPic.jpg", FilterName:="jpg"
.Shapes(MyChart).Cut
End With
Application.ScreenUpdating = True
Exit Sub
Finish:
MsgBox "You must select a picture"
End Sub
был скопирован прямо отсюда и прекрасно работает для тех случаев, которые я тестировал.
Поделиться Stewbob 14 августа 2013 в 14:06
3«Установите диапазон, который вы хотите экспортировать в папку
Рабочие книги («имя вашей рабочей книги»).Листы («ваше имя листа»).Выбрать
Dim rgExp As Range: Set rgExp = Range("A1:h41") ''' Copy range as picture onto Clipboard rgExp. CopyPicture Appearance:=xlScreen, Format:=xlBitmap
''' Create an empty chart with exact size of range copied
With ActiveSheet.ChartObjects.Add(Left:=rgExp.Left, Top:=rgExp.Top, _
Width:=rgExp.Width, Height:=rgExp.Height)
.Name = "ChartVolumeMetricsDevEXPORT"
.Activate
End With
''' Paste into chart area, export to file, delete chart.
ActiveChart.Paste
ActiveSheet.ChartObjects("ChartVolumeMetricsDevEXPORT").Chart.Export "C:\ExportmyChart.jpg"
ActiveSheet.ChartObjects("ChartVolumeMetricsDevEXPORT").Delete
Поделиться Vikash Kumar Singh 16 апреля 2017 в 05:28
1Спасибо за идеи! Я использовал вышеприведенные идеи, чтобы создать макрос для массового преобразования файлов-преобразования каждого файла одного формата в папке в другой формат.
Для этого кода требуется лист с ячейками «FilePath» (которые должны заканчиваться на «\»), «StartExt» (исходное расширение файла) и «EndExt» (желаемое расширение файла).
Предупреждение: он не запрашивает подтверждение перед заменой существующих файлов с тем же именем и расширением.Private Sub CommandButton1_Click() Dim path As String Dim pathExt As String Dim file As String Dim oldExt As String Dim newExt As String Dim newFile As String Dim shp As Picture Dim chrt As ChartObject Dim chrtArea As Chart Application.ScreenUpdating = False Application.DisplayAlerts = False 'Get settings entered by user path = Range("FilePath") oldExt = Range("StartExt") pathExt = path & "*." & oldExt newExt = Range("EndExt") file = Dir(pathExt) Do While Not file = "" 'cycle through all images in folder of selected format Set shp = ActiveSheet.Pictures.Insert(path & file) 'Import image newFile = Replace(file, "." & oldExt, "." & newExt) 'Determine new file name Set chrt = ActiveSheet.ChartObjects.Add(0, 0, shp.Width, shp.Height) 'Create blank chart for embedding image Set chrtArea = chrt. Chart
shp.CopyPicture 'Copy image to clipboard
With chrtArea 'Paste image to chart, then export
.ChartArea.Select
.Paste
.Export (path & newFile)
End With
chrt.Delete 'Delete chart
shp.Delete 'Delete imported image
file = Dir 'Advance to next file
Loop
Application.ScreenUpdating = True
Application.DisplayAlerts = True
End Sub
Поделиться Alex Sch 16 августа 2019 в 14:55
0Вот еще один хороший способ сделать это — использование внешнего зрителя, который принимает параметры командной строки (IrfanView в данном случае) : * я о том, что Михал Krzych написал выше.
Sub ExportPicturesToFiles() Const saveSceenshotTo As String = "C:\temp\" Const pictureFormat As String = ".jpg" Dim pic As Shape Dim sFileName As String Dim i As Long i = 1 For Each pic In ActiveSheet. Shapes
pic.Copy
sFileName = saveSceenshotTo & Range("A" & i).Text & pictureFormat
Call ExportPicWithIfran(sFileName)
i = i + 1
Next
End Sub
Public Sub ExportPicWithIfran(sSaveAsPath As String)
Const sIfranPath As String = "C:\Program Files\IrfanView\i_view32.exe"
Dim sRunIfran As String
sRunIfran = sIfranPath & " /clippaste /convert=" & _
sSaveAsPath & " /killmesoftly"
' Shell is no good here. If you have more than 1 pic, it will
' mess things up (pics will over run other pics, becuase Shell does
' not make vba wait for the script to finish).
' Shell sRunIfran, vbHide
' Correct way (it will now wait for the batch to finish):
call MyShell(sRunIfran )
End Sub
Редактировать:
Private Sub MyShell(strShell As String) ' based on: ' http://stackoverflow.com/questions/15951837/excel-vba-wait-for-shell-command-to-complete ' by Nate Hekman Dim wsh As Object Dim waitOnReturn As Boolean: Dim windowStyle As VbAppWinStyle Set wsh = VBA. CreateObject("WScript.Shell")
waitOnReturn = True
windowStyle = vbHide
wsh.Run strShell, windowStyle, waitOnReturn
End Sub
Поделиться El Scripto 07 марта 2015 в 11:52
0Dim filepath as string Sheets("Sheet 1").ChartObjects("Chart 1").Chart.Export filepath & "Name.jpg"При необходимости уменьшил код до абсолютного минимума.
Поделиться Ian Brigmann 16 февраля 2017 в 18:58
0Новые версии excel сделали старые ответы устаревшими. Потребовалось много времени, чтобы сделать это, но он делает довольно хорошую работу. Обратите внимание, что максимальный размер изображения ограничен, а соотношение сторон немного отклонено, так как я не смог идеально оптимизировать математику изменения формы.
Обратите внимание, что я назвал один из своих листов wsTMP, вы можете заменить его Листом1 или чем-то подобным. Печать скриншота до целевого пути занимает около 1 секунды.Option Explicit Private Declare PtrSafe Sub keybd_event Lib "user32" (ByVal bVk As Byte, ByVal bScan As Byte, ByVal dwFlags As Long, ByVal dwExtraInfo As Long) Sub weGucciFam() Dim tmp As Variant, str As String, h As Double, w As Double Application.PrintCommunication = False Application.EnableEvents = False Application.Calculation = xlCalculationManual Application.ScreenUpdating = False If Application.StatusBar = False Then Application.StatusBar = "EVENTS DISABLED" keybd_event vbKeyMenu, 0, 0, 0 'these do just active window keybd_event vbKeySnapshot, 0, 0, 0 keybd_event vbKeySnapshot, 0, 2, 0 keybd_event vbKeyMenu, 0, 2, 0 'sendkeys alt+printscreen doesn't work wsTMP.Paste DoEvents Const dw As Double = 1186.56 Const dh As Double = 755.28 str = "C:\Users\YOURUSERNAMEHERE\Desktop\Screenshot.jpeg" w = wsTMP. Shapes(1).Width
h = wsTMP.Shapes(1).Height
Application.DisplayAlerts = False
Set tmp = Charts.Add
On Error Resume Next
With tmp
.PageSetup.PaperSize = xlPaper11x17
.PageSetup.TopMargin = IIf(w > dw, dh - dw * h / w, dh - h) + 28
.PageSetup.BottomMargin = 0
.PageSetup.RightMargin = IIf(h > dh, dw - dh * w / h, dw - w) + 36
.PageSetup.LeftMargin = 0
.PageSetup.HeaderMargin = 0
.PageSetup.FooterMargin = 0
.SeriesCollection(1).Delete
DoEvents
.Paste
DoEvents
.Export Filename:=str, Filtername:="jpeg"
.Delete
End With
On Error GoTo 0
Do Until wsTMP.Shapes.Count < 1
wsTMP.Shapes(1).Delete
Loop
Application.PrintCommunication = True
Application.EnableEvents = True
Application.Calculation = xlCalculationAutomatic
Application.ScreenUpdating = True
Application.StatusBar = False
End Sub
Поделиться Dexterious22 02 октября 2018 в 20:59
Похожие вопросы:
Выполнение файла VBScript из Excel VBA macrosМне нужно несколько примеров excel vba, где с помощью кода VBA (макрос Excel) я мог бы вызвать VBScript и получить некоторые значения, такие как имя файла и информация каталога из vbscript, и.
..
Имитация действия вставки в excel с помощью vbaЯ пытаюсь заполнить электронную таблицу excel с помощью VBA (на самом деле это что-то другое, используя сервер COM, но это тот же синтаксис). Это сгенерированный отчет,который я хочу написать в…
Экспорт диаграмм из Excel в виде изображений с помощью PythonЯ пытался экспортировать диаграммы из Excel в виде файла изображения (JPG или ING) в Python. Я смотрю на WIn32com. Вот что у меня есть до сих пор. import win32com.client as win32 excel =…
чтение изображений и данных из файла excel с помощью poiя знаю, как читать данные из excel xls/xlxs. теперь мое требование заключается в том, что я должен читать изображения и данные из файла excel используя POI 3.8. можете вы, пожалуйста, руководство…
XML экспорт с кодом Excel vbaЯ хотел бы спросить, Можно ли каким-то образом включить некоторый код vba в файл XML? После экспорта моего файла excel в xml я его не вижу.
Моя цель-создать excel с macros из xml.
Удалить все модули VBA из файла excel?Можно ли удалить все модули VBA из файла Excel с помощью VBA? Имена модулей, если они вообще существуют, неизвестны до запуска этого скрипта.
Копирование данных из файла Excel в Word с помощью Word VBAМожет ли кто-нибудь помочь с простым кодом для импорта данных из файла Excel в документ word с помощью Word VBA?
Экспорт изображений Excel VBA в исходном разрешенииЭто решение: экспорт изображений Excel VBA Работает просто отлично, но он использует метод диаграммы, который изменяет размер изображений внутри таблицы до screenshot(в моем случае даже включая…
Применяйте стили изображений с помощью макроса в VBA ExcelЯ пытаюсь применить стили изображений к изображению, добавленному с помощью макроса в VBA Excel, но не могу найти способ. Я пробовал использовать макрос записи, но он помог мне’nt.
Итак, можно ли…
VBA — экспорт изображения из Excel *without* с помощью буфера обмена (Copy/Paste)Есть много замечательных примеров того, как взять диапазон Excel, создать из него образ и сохранить его на диске. Вот один из них: экспорт изображений из файла excel в jpg с помощью VBA Это отлично…
Как конвертировать PDF файл в формат Word, Excel или JPG
Один распространенный вопрос, который я часто получаю в эти дни, – это как конвертировать PDF-файл в формат Microsoft Word (doc), Excel (xls) или в формат изображений JPG. Обычно люди хотят знать, как конвертировать файл в PDF, но также приятно иметь возможность конвертировать обратно другим способом.Есть несколько способов перевести ваш PDF-файл в любой из этих трех форматов, но я собираюсь придерживаться самых простых методов, которые требуют наименьшего количества программного обеспечения. В наши дни вы можете делать все преобразования онлайн, используя бесплатные инструменты.
Конвертировать PDF в JPG – онлайн инструменты
Перейти к ZamZar.com и нажмите на Выберите файлы кнопку, чтобы начать. Идите вперед и выберите файл PDF, а затем нажмите кнопку ОК. Теперь на шаге 2, выберите тип файла, в который вы хотите конвертировать PDF-файл. По умолчанию поле определяет тип файла, который вы выбрали, и предоставляет список возможных типов выходных файлов.
Вы можете преобразовать файл PDF, например, в файл doc или docx, в файл bmp, jpg, gif или png и т. Д. В нашем случае мы выберем JPG из списка. Теперь введите свой адрес электронной почты и нажмите Конвертировать кнопка.
Вот и все! Вы должны получить письмо через несколько минут со ссылкой на ваш преобразованный файл. Люди жаловались на значительные задержки между нажатием кнопки «Преобразовать» и фактическим получением электронного письма.
Кажется, что сайт довольно занят, и если вы пытаетесь выполнить конвертацию в очень загруженное время, получение конвертированного файла может занять несколько часов или даже день или два.
Если это неприемлемо, они платят ежемесячные планы, но если вам не нужно постоянно конвертировать PDF-файлы, покупать не стоит. Если у вас возникли проблемы с Zamzar, вы можете попробовать другой бесплатный онлайн-конвертер PDF в JPG:
http://pdf2jpg.net/
Конечный результат на обоих сайтах был очень хорошим, но, опять же, мало что нужно сделать, чтобы преобразовать PDF в изображение. Это становится сложнее, когда вам нужно перейти из формата PDF в Word или Excel.
Конвертировать PDF в JPG – Desktop Software
Первое, что вам нужно сделать, это загрузить бесплатное программное обеспечение (единственное, которое я смог найти), которое автоматически преобразует документы PDF в формат изображений JPEG.
Перейти к Omniformat страница загрузки и скачать оба Омниформат v8.3 и PDF995 приложение. Вам нужно будет скачать и установить PDF995 перед установкой Omniformat. Установив обе программы, перейдите в меню «Пуск», найдите группу программ Software995 и нажмите «Omniformat».
Единственное, что раздражает в этой программе, это то, что она требует просмотра некоторых объявлений в течение 30 секунд! Тем не менее, это лучше, чем платить 20 или 40 долларов за программу просто для простого преобразования!
Он открывает другой экземпляр окна вашего браузера для веб-сайта каждого из спонсоров, но не устанавливает шпионское ПО на ваш компьютер (без всплывающей рекламы).
После загрузки программы вы увидите раздел «Папки для часов», А затем кнопка внизу под названием«Начать мониторинг” а также “Один проход«.
В основном это работает так, что вам нужно COPY PDF-файлы, которые вы хотите преобразовать в формат JPG в C: OmniFormat часы папку, а затем нажмите Один проход, Программа будет искать в этом каталоге и конвертировать каждую страницу каждого PDF в отдельный файл JPG.
Если вы нажмете «Начать мониторинг», вы сможете продолжать помещать PDF-файлы в эту папку, и программа будет автоматически конвертировать их в JPEG-файлы, пока программа открыта.
Обратите внимание, что программа удалений оригинальный документ PDF, который он использует, поэтому вам нужно скопировать документ PDF в папку просмотра, а не перемещать его! Теперь вы должны увидеть ваши конвертированные файлы, как показано ниже:
Другая настольная программа, которую вы можете использовать, Бесплатный PDF в JPG, который также позволяет конвертировать PDF в BMP, PNG и TIFF формат.
Конвертировать PDF в Word
Опять же, Замзар отлично справляется с этой конверсией. Выберите ваш файл, а затем выберите DOC или DOCX из списка вариантов на шаге 2. Введите адрес электронной почты для шага 3 и нажмите Конвертировать,
В течение нескольких минут вы получите электронное письмо со ссылкой для скачивания вашего конвертированного файла. Я опробовал этот сервис на некоторых довольно сложных документах PDF с текстом в нескольких столбцах, несколькими изображениями и т. Д., И был очень впечатлен его точностью преобразования.
Опять же, есть другие способы перевести PDF в формат Word. Вот несколько хороших бесплатных онлайн-инструментов:
http://www.pdftoword.com/
http://www.pdfonline.com/pdf-to-word-converter/
http://www.freepdfconvert.com/pdf-word
Если вам нужна программа для конвертации PDF в Word, вы можете скачать ее здесь:
http://download.cnet.com/Free-PDF-to-Word/3000-10743_4-75732609.html
Конвертировать PDF в Excel
Для Excel это тот же процесс с использованием Zamzar, который хорош, если они не заняты. Ранее вам нужно было преобразовать файл PDF в файл TXT, а затем импортировать его в Excel и сохранить как файл XLS или XLSX. Однако теперь он обновлен, и Zamzar полностью поддерживает формат Excel, поэтому вы можете выбрать его непосредственно на шаге 2.
Помимо Zamzar, другим популярным выбором является программное обеспечение Nitro PDF, которое также является той же компанией, что и pdftoword.com, упомянутая выше:
https://www.pdftoexcel.
com/Если у вас очень сложный PDF-файл и форматирование не преобразуется должным образом с помощью этих бесплатных инструментов, вам, возможно, придется инвестировать в коммерческий пакет программного обеспечения, который, возможно, будет работать лучше.
Например, есть Adobe Acrobat Pro DC, который позволит вам конвертировать PDF файлы в Word, Excel и даже файлы Powerpoint. Конечно, это довольно дорого (15 долларов в месяц) и, вероятно, того стоит, только если ваш ИТ-отдел оплачивает счет.
EXCEL в JPG — Конвертировать EXCEL в JPG онлайн бесплатно
Варианты конвертации документов:
Варианты конвертации изображений:
Изменить размер изображения: Сохранить исходный размер изображенияИзменить ширину и высотуИзменить только ширинуИзменить только высотуИзменить процент оригинала
Варианты конвертации видео:
Размер видео: Сохранить исходный размер видеоПользовательская размер видео160x112176x144220x176320x240352x240352x288368x208480x272480x320480x480480x576512x384640x480 (480p)720x480720x5761080x720 (720p)1440x10801920x1080 (1080p)1920x12002048x15362560x14402560x16003840x2160
Битрейт видео: Сохранить оригинальный битрейт видеоПользовательская битрейт видео64k96k112k128k160k192k256k384k512k768k1024k2000k4000k5000k6000k8000k10000k12000k
Частота кадров: Сохранить исходную частоту кадровПользовательская частоту кадров81012152023.
976242529.97305060Видео аспект: Сохранить оригинальный видео аспект4:316:9
Варианты преобразования звука:
Аудио битрейт: Сохранить оригинальный аудио битрейтПользовательская аудио битрейт32k64k96k128k160k192k224k256k320k
Частота дискретизации: Сохранить исходную частоту дискретизацииПользовательская частоту дискретизации11025220504410048000
Конвертировать файл Excel в картинку, конвертировать xls в bmp, конвертировать xls в png, конвертировать xlsx в jpeg
Продвинутые пользователи знают, что файлы эксель можно преобразовать в другой формат.
Файл Microsoft Excel можно преобразовать в другой формат с помощью команды «Сохранить как» в Excel. Форматы файлов, доступные в диалоговом окне Сохранение документа, зависят от типа активного листа (обычный, диаграмма или другой тип листа). Для большинства форматов файлов преобразуется только активный лист. Чтобы преобразовать другие листы, нужно открыть и сохранить их по отдельности. При преобразовании файла в другой формат часть форматирования, данных и других свойств может быть утрачена. Файлы можно открывать и сохранять в текстовых форматах. При сохранении книги в текстовом формате теряются все элементы форматирования. Можно конвертировать файл Excel в картинку? Допустим, вам нужно конвертировать xls в bmp или конвертировать xls в jpg. Как конвертировать эксель в графический формат?Если нужный конвертер формата файла отсутствует в Excel, можно попытаться поискать в Интернете компанию, предлагающую конвертеры форматов, которые не поддерживаются в Excel.
Есть конвертеры, которые способны конвертировать xls в png или конвертировать xlsx в jpeg. Скорость преобразования определит, насколько быстро будет происходить конвертирование файла. Думаем, намного приятнее и удобнее, когда процесс происходит быстро. Чем выше скорость конвертера, тем больше файлов вы сможете преобразовать за меньший промежуток времени. Если вы не любите сложные программы, то вы наверняка согласитесь что простота в использовании – тоже немаловажная особенность.Мы готовы предложить вам хороший инструмент для конвертации. Здесь вы можете найти конвертер, чтобы конвертировать файл Excel в картинку. Это лучший конвертер, который поддерживает следующие графические форматы: JPG, BMP, GIF, TIF, TGA, RLE, PNG, EMF, WMF. Если вам нужна качественная конвертация, то вы выберете этот инструмент. Он может конвертировать xls, xlsx, xlsm (рисунки, графику). Вы можете бесплатно скачать эту программу и установить на свой компьютер. Программа разработана для операционной системы Windows: Windows XP, Windows Vista, Windows 7, чтобы конвертировать xls в bmp.
Таким образом, мы поговорили о преобразовании эксель в другие форматы. Программа может преобразовать файл в некоторые текстовые форматы. Что касается графических форматов, то требуется установка дополнительной утилиты. Вам нужен конвертер для конвертации в графические форматы. Способность преобразования – не единственная особенность, на которую следует обращать внимание при покупке конвертера. Мы упомянули некоторые особенности и выбор за вами. У вас есть конвертер, чтобы конвертировать xls в png или конвертировать xlsx в jpeg.
Конвертировать JPG в Excel | Smallpdf
OCR для отсканированных файлов JPG
Наш конвертер изображений также может обрабатывать отсканированные изображения JPG с технологией OCR. Эта функция гарантирует, что весь текст и числа будут извлечены, реконструированы и помещены в новый файл Excel. И речь идет не только о сканированных документах; инструмент также может обрабатывать фотографии в формате JPG, сделанные с помощью цифровых камер или даже вашего мобильного телефона.
Выходной файл будет в редактируемом формате, чтобы вы могли легко редактировать, изменять, удалять или добавлять вручную с помощью Microsoft Excel.И да, конвертер можно использовать для ваших нужд JPG.
Преобразование JPG в Excel на Mac, Windows или Linux
Наш веб-сайт работает в Интернете, а это значит, что для преобразования файла вам в значительной степени нужен только доступ в Интернет. Как универсальная платформа, сайт совместим со всеми стандартными операционными системами. Качество изображения в выходном файле всегда будет на высшем уровне, от изображений до ячеек данных.
Изменение документов Excel
Есть также 17 других инструментов для дальнейшего улучшения выходного файла.Вы можете преобразовать файл Excel обратно в JPG, используя тот же процесс (через конвертер, при этом PDF выступает в качестве моста).
Конвертер PDF также обрабатывает другие широко используемые документы на рабочем месте, включая документы PNG, PPT и Word.
Мы также можем сжимать, разделять, объединять или даже удалять отдельные страницы любым удобным для вас способом. Просто помните, что есть ограничение на 2 использования в час бесплатно. Чтобы преодолеть это ограничение доступа, обязательно узнайте, как получить членство Pro.
Обменивайтесь файлами с легкостью
Как файлы PDF, так и форматы JPG широко используются в повседневной жизни, как для профессионалов, так и для повседневного использования. Оба являются сжатыми файлами, достаточно легкими для совместного использования, но все же достаточно хорошими, чтобы сохранять данные в их исходном формате после преобразования.
Чтобы сделать процесс обмена еще более оптимизированным, Smallpdf интегрирован как с Google Диском, так и с Dropbox — как часть новых расширений Dropbox. Файлы можно легко импортировать и экспортировать на эти платформы и с этих платформ.
Кроме того, на каждой странице результатов теперь есть возможность поделиться своими файлами по электронной почте или с помощью ссылки для совместного использования.
Доступ к этой функции можно получить, щелкнув логотип электронной почты рядом с кнопкой загрузки на каждой странице результатов.Вставка данных из изображения — служба поддержки Office
С помощью новой функции «Данные из изображения» вы можете вставлять данные из вырезки экрана в буфер обмена, в файл изображения со своего компьютера или с камеры iPhone.
Важно: Поддерживаются только следующие наборы символов: боснийский, хорватский, чешский, датский, голландский, английский, финский, французский, немецкий, венгерский, итальянский, норвежский, польский, португальский, румынский, сербский, словацкий, словенский, испанский, Шведский и турецкий.
Как это работает
Захват данных из изображения.
Есть три метода:Метод
Ступеньки
Советы
Использовать существующий файл изображения
Щелкните Вставка> Данные из рисунка> Рисунок из файла .
Изображение должно отображать только те данные, которые вы хотите импортировать. При необходимости обрежьте изображение.
Избегайте изображений, на которых данные изображены под углом — перспектива должна быть прямой и сфокусированной. Если возможно, подумайте о том, чтобы исправить перспективу с помощью элементов управления iPhone.
Сделать скриншот
Сделайте снимок экрана таблицы, затем нажмите Вставить> Данные из рисунка> Рисунок из буфера обмена .
Отсканируйте данные с помощью iPhone (требуется, чтобы iPhone был настроен на использование камеры Continuity.
)В Excel щелкните ячейку правой кнопкой мыши и выберите Сканировать документы .
Направьте камеру iPhone на данные.
Отрегулируйте освещение и фокус, затем нажмите кнопку, чтобы сделать снимок.
Внесите дополнительные изменения в изображение, затем нажмите Сохранить .
Сканируемый документ должен быть максимально хорошо освещен.
Убедитесь, что вы сканируете только те данные, которые хотите импортировать.
Не сканируйте под углом — целитесь прямо в данные. При необходимости используйте элементы управления iPhone, чтобы внести изменения в отсканированное изображение.
После того, как вы сделали снимок, диалоговое окно «Данные из рисунка» покажет, как Excel анализирует изображение на предмет данных.
Просмотрите результаты, внесите необходимые исправления в данные и нажмите Вставить данные .
Сценарии для опробования
Импорт данных из файла образца изображения Щелкните правой кнопкой мыши следующее изображение и сохраните локальную копию, затем щелкните Вставить> Данные из изображения> Изображение из файла и следуйте инструкциям на экране, чтобы преобразовать изображение в данные.
Отсканируйте некоторые данные из книги или журнала Если вы видите интересные данные в книге и хотите использовать их в Excel, это отличный способ пропустить набор текста.
Если у вас iPhone, щелкните правой кнопкой мыши в Excel на Mac и выберите «Сканировать документы». Ваш iPhone загорится. Затем вы можете сфотографировать данные и, следуя инструкциям на экране, быстро перенести данные в Excel.Снимок экрана с таблицей с веб-сайта Если вы когда-либо пытались скопировать и вставить некоторые данные с веб-сайта, вы, вероятно, заметили, что форматирование после вставки выглядит иначе, чем на веб-сайте. Вместо этого попробуйте сделать снимок экрана таблицы (нажав SHIFT + CTRL + CMD + 4 на Mac), затем выберите Вставить> Данные из рисунка> Рисунок из буфера обмена .Затем следуйте инструкциям на экране.
Сфотографируйте некоторые напечатанные данные. Возможно, вы хотите перенести данные из своих предыдущих налоговых деклараций в Excel, а у вас есть только распечатанные копии.
Просто сделайте снимок каждого из них, перенесите изображения на свой Mac (OneDrive отлично подходит для этого). Затем щелкните «Вставка»> «Данные из рисунка»> «Рисунок из файла » и следуйте инструкциям на экране, чтобы преобразовать изображение в данные.
Начало работы
Откройте Excel на своем телефоне или планшете и нажмите кнопку « Вставить данные из изображения» , чтобы начать работу.
Затем сузьте область данных, пока не увидите, что они обведены красной рамкой, затем нажмите кнопку захвата. При необходимости вы можете использовать ручки для изменения размера по краям изображения, чтобы сначала обрезать его до нужного размера.
Мощный AI-движокExcel обработает изображение и преобразует его в таблицу. Когда он впервые импортирует ваши данные, он даст вам возможность исправить любые проблемы, обнаруженные в процессе преобразования.
Нажмите Игнорировать , чтобы перейти к следующей проблеме, или Изменить , чтобы исправить проблему.Нажмите Вставьте , когда вы закончите, и Excel завершит процесс преобразования и отобразит ваши данные.
В настоящее время функция «Вставить данные из изображения» поддерживается на следующих языках:
Английский
Боснийский
Хорватский
Чешский
Датский
Голландский
Финский
Французский
Немецкий
Венгерский
Итальянский
Норвежский
Польский
Португальский
Румынский
сербский
Словацкий
словенский
Испанский
Шведский
Турецкий
См.
ТакжеПолучить Office для Android
Видео: начало работы с Excel для Android
Справка по Excel для Android
Онлайн-конвертер JPEG в XLS
Вы также можете конвертировать JPEG во многие другие форматы файлов.См. Полный список ниже.
Конвертер JPEG в TIFF (формат файлов изображений с тегами) Конвертер JPEG в TIF (формат файлов изображений с тегами) Конвертер JPEG в JPG (файл изображений совместной группы экспертов по фотографии) Конвертер JPEG в JPEG (изображение JPEG) Конвертер JPEG в PNG (переносимая сетевая графика) Конвертер JPEG в GIF (файл графического формата обмена) Конвертер JPEG в BMP (формат файла растрового изображения) Конвертер JPEG в ICO (файл значков Microsoft) Конвертер JPEG в PSD (документ Adobe Photoshop) Конвертер JPEG в WMF (метафайл Windows) Конвертер JPEG в EMF (расширенный формат метафайлов) Конвертер JPEG в DCM (изображение DICOM) Конвертер JPEG в WEBP (формат файлов растровых изображений в Интернете) Конвертер JPEG в SVG (файл масштабируемой векторной графики) Конвертер JPEG в JP2 (файл основного изображения JPEG 2000) Конвертер JPEG в EMZ (расширенный сжатый метафайл Windows) Конвертер JPEG в WMZ (сжатый метафайл Windows) Конвертер JPEG в SVGZ (сжатый файл масштабируемой векторной графики) Конвертер JPEG в HTML (язык гипертекстовой разметки) Конвертер JPEG в HTM (файл языка гипертекстовой разметки) Конвертер JPEG в MHT (инкапсуляция MIME агрегированного HTML) Конвертер JPEG в MHTML (инкапсуляция MIME агрегированного HTML) Конвертер JPEG в PPT (презентация PowerPoint) Конвертер JPEG в PPS (слайд-шоу Microsoft PowerPoint) Конвертер JPEG в PPTX (презентация PowerPoint Open XML) Конвертер JPEG в PPSX (слайд-шоу PowerPoint Open XML) Конвертер JPEG в ODP (формат файла презентации OpenDocument) Конвертер JPEG в OTP (шаблон исходного графика) Конвертер JPEG в POTX (шаблон Microsoft PowerPoint Open XML) Конвертер JPEG в POT (шаблон PowerPoint) Конвертер JPEG в POTM (шаблон Microsoft PowerPoint) Конвертер JPEG в PPTM (презентация Microsoft PowerPoint) Конвертер JPEG в PPSM (слайд-шоу Microsoft PowerPoint) Конвертер JPEG в FODP (представление OpenDocument Flat XML) Конвертер JPEG в XLSX (электронная таблица Microsoft Excel Open XML) Конвертер JPEG в XLSM (электронная таблица Microsoft Excel с поддержкой макросов) Конвертер JPEG в XLSB (двоичный файл электронной таблицы Microsoft Excel) Конвертер JPEG в ODS (таблица открытого документа) Конвертер JPEG в XLTX (шаблон Microsoft Excel Open XML) Конвертер JPEG в XLT (шаблон Microsoft Excel) Конвертер JPEG в XLTM (шаблон Microsoft Excel с поддержкой макросов) Конвертер JPEG в XLAM (надстройка Microsoft Excel с поддержкой макросов) Конвертер JPEG в FODS (электронная таблица OpenDocument Flat XML) Конвертер JPEG в SXC (таблица StarOffice Calc) Конвертер JPEG в DOC (документ Microsoft Word) Конвертер JPEG в DOCM (документ Microsoft Word с поддержкой макросов) Конвертер JPEG в DOCX (документ Microsoft Word Open XML) Конвертер JPEG в DOT (шаблон документа Microsoft Word) Конвертер JPEG в DOTM (шаблон Microsoft Word с поддержкой макросов) Конвертер JPEG в DOTX (шаблон документа Word Open XML) Конвертер JPEG в RTF (формат файла Rich Text) Конвертер JPEG в ODT (текст открытого документа) Конвертер JPEG в OTT (шаблон открытого документа) Конвертер JPEG в TXT (формат обычного текстового файла) Конвертер JPEG в MD (Markdown) Конвертер JPEG в PDF (переносимый документ) Конвертер JPEG в EPUB (формат файлов цифровых электронных книг) Конвертер JPEG в XPS (спецификация Open XML Paper) Конвертер JPEG в TEX (исходный документ LaTeX)Как конвертировать JPG в Excel с помощью Able2Extract Professional
Мы давно говорили о возможностях Able2Extract, когда дело доходит до преобразования PDF в Excel, но есть еще одна хитрость, которую мы еще не рассмотрели подробно.
Теперь вы знаете, что можете преобразовать любой файл в Excel, то есть любой файл, который можно распечатать, можно преобразовать в Excel. Таким образом, вы можете преобразовывать таблицы в PowerPoint или таблицы в Microsoft Word в Excel.
Но это не только означает, что вы можете конвертировать цифровые документы. Знаете ли вы, что вы также можете конвертировать JPEG в Excel?
Для людей, которые делают снимки документов как быстрый способ получения данных, это идеальное решение.Несколько возможных способов это пригодится, когда вы:
- Запись финансовых данных с бумажных копий без доступа к сканеру.
- Вы проводите исследования в полевых условиях, и вам необходимо быстро собрать данные для анализа в Excel.
- Создание базы данных электронных таблиц из разрозненных источников бумаги, которых нет на вашем компьютере.
Вытаскивание смартфона — это инстинктивный способ получить копию данных, когда вы не готовы или ищете простой способ сэкономить.
Конвертируйте JPG в Excel с помощью Able2Extract ProfessionalИтак, что дальше после того, как вы сделали снимок табличных данных?
Во-первых, загрузите этот файл JPG на свой компьютер или сделайте его доступным в цифровом виде для работы с Able2Extract Professional. Подключение смартфона в качестве запоминающего устройства к рабочему столу с помощью кабеля или отправка его себе по электронной почте с последующей загрузкой на компьютер — оба надежных способа начать работу.
Когда у вас есть доступ к файлу JPG с вашего компьютера, выполните следующие действия:
Шаг 1
Откройте файл в Able2Extract Professional, щелкнув значок Открыть на панели инструментов.Обязательно выберите Все файлы в диалоговом окне «Открыть», чтобы отобразить и открыть файл JPG в Able2Extract Professional.
Шаг 2
Открыв JPG в Able2Extract Professional, выберите табличное содержимое, которое вы хотите преобразовать.
Вы можете использовать перетаскивание, чтобы выделить определенные части для преобразования.Шаг 3
На правой боковой панели в разделе «Режим оптического распознавания текста» включите параметр Включено (преобразование на основе изображений) , щелкнув по нему.
Обратите внимание, что изображение вашей таблицы должно быть правильно выровнено, а текст четким и в фокусе . Чем ровнее сфотографирована таблица и чем четче текст, тем лучше будут результаты преобразования.
Шаг 4
Щелкните значок Excel на панели инструментов. Затем нажмите Define , чтобы выбрать в диалоговом окне параметр «Пользовательское преобразование». Затем ОК в диалоговом окне «Определить структуру», которое появится следующим.
Шаг 5
В режиме Custom Excel используйте инструменты на панели инструментов, чтобы настроить преобразование, добавляя или удаляя строки, добавляя или удаляя столбцы и т.
Д. Затем просмотрите результаты преобразования перед преобразованием данных.Когда предварительный просмотр вам понравится, нажмите кнопку Преобразовать в Excel на панели инструментов, чтобы преобразовать файл.
Шаг 6
Name и Сохраните получившийся файл электронной таблицы на свой компьютер.
После завершения процесса преобразования вы можете мгновенно получать доступ, редактировать и анализировать преобразованные данные в Microsoft Excel.
Дополнительный совет : Ознакомьтесь с нашим полным руководством из PDF в Excel, чтобы получить дополнительные советы по преобразованию данных таблиц.
В следующий раз, когда вы столкнетесь с трудностями при переносе таблиц в Excel как нецифровых, так и не-PDF, просто сделайте одну тщательно сделанную фотографию, и вы сможете позволить Able2Extract Professional сделать остальную часть более сложной работы за вас.
Начните с загрузки 7-дневной бесплатной пробной версии ниже!Как вставить изображение в ячейку в Excel (пошаговое руководство)
Посмотреть видео — Как вставить изображение в ячейку в Excel
Несколько дней назад я работал с набор данных, включающий список компаний в Excel вместе с их логотипами.
Я хотел разместить логотип каждой компании в ячейке рядом с ее названием и заблокировать его таким образом, чтобы при изменении размера ячейки логотип тоже должен был измениться.
Я также хотел, чтобы логотипы фильтровались, когда я фильтрую названия компаний.
Принятие желаемого за действительное? Не совсем.
Вы можете легко вставить изображение в ячейку в Excel таким образом, чтобы при перемещении, изменении размера и / или фильтрации ячейки изображение также перемещалось / изменялось / фильтровалось.
Ниже приведен пример, в котором логотипы некоторых популярных компаний вставляются в соседний столбец, и когда ячейки фильтруются, логотипы также фильтруются вместе с ячейками.
Это также может быть полезно, если вы работаете с продуктами / артикулами и их изображениями.
Когда вы вставляете изображение в Excel, оно не связано с ячейками и не может перемещаться, фильтровать, скрывать и изменять размер вместе с ячейками.
В этом уроке я покажу вам, как:
- Вставить изображение в ячейку в Excel.
- Заблокируйте изображение в ячейке, чтобы оно перемещалось, изменяло размер и фильтровалось вместе с ячейками.
Вставить изображение в ячейку в Excel
Вот шаги, чтобы вставить изображение в ячейку в Excel:
- Перейдите на вкладку «Вставка».
- Нажмите на опцию «Изображения» (она находится в группе иллюстраций).
- В диалоговом окне «Вставить изображение» найдите изображения, которые вы хотите вставить в ячейку Excel.
- Нажмите кнопку «Вставить».
- Измените размер картинки / изображения так, чтобы они идеально вписывались в ячейку.
- Поместите картинку в ячейку.
- Классный способ сделать это — сначала нажать клавишу ALT, а затем переместить картинку с помощью мыши. Он защелкнется и выровняется с границей ячейки, как только приблизится к ней.
Если у вас несколько изображений, вы можете выбрать и вставить все изображения сразу (как показано на шаге 4).
Вы также можете изменить размер изображения, выбрав его и перетащив края. В случае логотипов или изображений продуктов вы можете сохранить неизменным соотношение сторон изображения. Чтобы соотношение сторон не изменилось, используйте углы изображения, чтобы изменить его размер.
Когда вы помещаете изображение в ячейку, используя описанные выше шаги, оно не будет прикрепляться к ячейке, если вы измените размер, отфильтруете или скроете ячейки.Если вы хотите, чтобы изображение прикреплялось к ячейке, вам нужно привязать изображение к ячейке , в которой оно размещено n.
Для этого вам необходимо выполнить дополнительные шаги, как показано в разделе ниже.
Заблокировать изображение с помощью ячейки в Excel
После того, как вы вставили изображение в книгу, изменили его размер, чтобы оно соответствовало ячейке, и поместили его в ячейку, вам необходимо заблокировать его, чтобы убедиться, что оно перемещается, фильтрует и т. Д. и прячется с камерой.
Вот шаги, чтобы заблокировать изображение в ячейке:
- Щелкните изображение правой кнопкой мыши и выберите Формат изображения.
- На панели «Формат изображения» выберите «Размер и свойства», а в параметрах «Свойства» выберите «Переместить и размер с ячейками».
Вот и все!
Теперь вы можете перемещать ячейки, фильтровать или скрывать, а изображение также будет перемещаться / фильтровать / скрывать.
Попробуйте сами .. Загрузите файл примера
Это может быть полезным приемом, когда у вас есть список продуктов с их изображениями, и вы хотите отфильтровать определенные категории продуктов вместе с их изображениями.
Вы также можете использовать этот прием при создании панелей мониторинга Excel.
Вам также могут понравиться следующие руководства по Excel:
Используйте свой телефон, чтобы мгновенно превратить фотографию в электронную таблицу Excel
Excel’s Insert Data from Picture в действии.
Анджела Ланг / CNETОтойдите от клавиатуры и возьмите телефон. Инструмент Microsoft для телефонов Android и iPhone (899 долларов на Amazon) может конвертировать слова и числа на листе бумаги в электронную таблицу Microsoft Excel за пару секунд. С помощью инструмента Excel «Вставить данные из изображения» вы можете сделать снимок данных в строках и столбцах на листе бумаги, а приложение Excel для iOS и Android автоматически преобразует изображение в редактируемые данные таблицы.
Инструмент преобразования электронных таблиц отправляет изображение в онлайн-механизм распознавания изображений Excel для обработки и преобразования слов и чисел в таблицу. И он может конвертировать почти два десятка языков. Во время импорта Excel дает вам возможность исправить что-либо перед преобразованием.
Excel для Android и iPhone является частью коллекции приложений Microsoft Office для мобильных устройств, в которую входят Word и PowerPoint.
Бесплатные версии мобильных приложений для повышения продуктивности предоставляют вам базовые инструменты редактирования.С подпиской на Microsoft Office вы можете разблокировать больше функций, например, возможность сотрудничать с коллегами.Подробнее на TechRepublic: 56 советов по Excel, которые должен освоить каждый пользователь
Электронная таблица Excel, преобразованная из печатной страницы.
Скриншот Клиффорда Колби / CNETЧтобы превратить фотографии телефона в данные таблицы Excel:
1. В приложении Excel нажмите кнопку «Создать» в верхней части приложения, чтобы создать новый файл.Вы можете создать пустую книгу или использовать один из шаблонов, поставляемых с приложением.
2. В нижней части приложения нажмите кнопку «Данные из изображения» (это сетка 3×3 с камерой). Если вы впервые используете инструмент, нажмите «Разрешить», чтобы разрешить Microsoft преобразовать изображение в данные с помощью онлайн-службы Microsoft.
3. Поместите красный прямоугольник вокруг данных, которые вы хотите захватить, а затем нажмите круглую кнопку «Захват». Приложение немного привередливо в том, что оно делает, и не идентифицируется как данные, поэтому вам может потребоваться несколько попыток, чтобы захватить то, что вы хотите.
Сейчас играет: Смотри: Превратите фотографию данных в электронную таблицу Microsoft Excel
2:37
4. Если вас устраивает полученное изображение, нажмите красную кнопку-флажок, чтобы преобразовать данные.Если это не так, нажмите X и начните заново.
5. При предварительном просмотре захваченных данных нажмите выделенную красным ячейку, а затем нажмите «Изменить», чтобы ввести недостающую информацию.
После каждого изменения нажимайте Готово. Вы также можете коснуться невыделенных ячеек, чтобы внести исправления или изменения.6. Когда данные вас устраивают, нажмите «Вставить» вверху, чтобы поместить данные в книгу.
Исправление распечатанной шпаргалки по фэнтези-футболу перед преобразованием в электронную таблицу Excel.
Скриншот Клиффорда Колби / CNETДанные, которые вы собираете и конвертируете, могут быть числами и словами, а также могут включать списки и ингредиенты рецептов. И хотя приложение с удивительной точностью конвертировало данные с листа бумаги, мы также получили его для сбора данных с экрана ноутбука. Однако с нашими рукописными данными возникли проблемы.
Инструмент «Вставить данные из рисунка» для Android и iOS может работать с 21 языком, включая французский, немецкий и испанский, и, по словам Microsoft, в будущем появятся и другие языки.
Отправка данных электронной таблицы в Microsoft для обработки может вызвать проблемы с конфиденциальностью.
«Конфиденциальность и безопасность данных клиентов Microsoft имеют первостепенное значение для компании», — заявил представитель Microsoft. «Функции аналитики в приложениях Office строго соблюдают права доступа, предоставленные пользователю, и не раскрывают информацию никому, кому не был предоставлен доступ».
Преобразование файла Excel (.xls) в JPEG с легкостью!
Для компаний, которые размещают прайс-листы и другие данные электронных таблиц Microsoft Excel на вашем веб-сайте, может иметь смысл преобразовать эти файлы в формат JPEG. Поскольку файлы JPEG можно просматривать непосредственно в любом веб-браузере, это делает вашу информацию доступной для пользователей, чьи компании не разрешают им загружать файлы или у которых не установлен Excel на своих компьютерах. С универсальным конвертером документов пользователи могут быстро и легко конвертировать электронные таблицы Excel в формат JPEG.
Следуйте этому руководству, чтобы начать преобразование файла Excel (* .xls).
Загрузите и установите на свой компьютер программу «Универсальный конвертер документов».
Откройте файл Excel (* .xls) в Microsoft Excel и нажмите Файл-> Печать … в главном меню приложения.
На панели настроек нажмите Загрузить свойства .
В диалоговом окне Открыть выберите «Рабочий лист в PDF.xml» и нажмите Открыть .
Выберите изображение JPEG на вкладке Формат файла и щелкните OK , чтобы закрыть окно свойств универсального конвертера документов .
Корень из 64 в 4 степени: КОРЕНЬ КУБИЧЕСКИЙ — это… Что такое КОРЕНЬ КУБИЧЕСКИЙ?
//КОРЕНЬ КУБИЧЕСКИЙ — это… Что такое КОРЕНЬ КУБИЧЕСКИЙ?
- КОРЕНЬ КУБИЧЕСКИЙ
КОРЕНЬ КУБИЧЕСКИЙ (обозначение 3Ц), число, которое необходимо дважды умножить на само себя для получения заданного числа. Например, кубический корень из 64 равняется 4, поскольку 4x4x4 = 64. В этом случае записывают: 3Ц64 = 4. В терминах алгебры кубический корень из х3 равняется х, а кубический корень х равняется 3Цх или х1/3.
Научно-технический энциклопедический словарь.
- КОРЕНЬ КВАДРАТНЫЙ
- КОРИ
Смотреть что такое «КОРЕНЬ КУБИЧЕСКИЙ» в других словарях:
КОРЕНЬ — КОРЕНЬ, корня, мн. корни, корней, м. 1. Вросшая в землю часть растения, через к рую оно всасывает соки из почвы. Бурей выворотило деревья с корнями. Дуб глубоко пустил корни в землю. || Древесина или вещество этой части растения. Лакричный корень … Толковый словарь Ушакова
КОРЕНЬ КВАДРАТНЫЙ — КОРЕНЬ КВАДРАТНЫЙ, число, обозначаемое как х, которое при умножении на само себя дает число х. Квадратный КОРЕНЬ из 4 равен 2, следовательно Ц4 = 2; Ц2 = 1,4142 (с точностью до четырех разрядов десятичной дроби). Отрицательные числа имеют… … Научно-технический энциклопедический словарь
корень — сущ., м., употр. сравн. часто Морфология: (нет) чего? корня, чему? корню, (вижу) что? корень, чем? корнем, о чём? о корне и на корню; мн. что? корни, (нет) чего? корней, чему? корням, (вижу) что? корни, чем? корнями, о чём? о корнях 1. Корень это … Толковый словарь Дмитриева
Корень n-й степени — Арифметический корень n й степени (n > 0) из неотрицательного числа есть единственное неотрицательное решение уравнения . Обозначается символом (или просто при ) … Википедия
КУБИЧЕСКИЙ — (от слова куб). 1) имеющий вид куба. 2) мера, имеющая форму куба, т. е. правильного шестигранника. 3) корень, всякая величина, которая, будучи помножена три раза сама на себя, дает данную величину. Словарь иностранных слов, вошедших в состав… … Словарь иностранных слов русского языка
кубический — КУБИЧЕСКИЙ, КУБИЧНЫЙ ая, ое. cubique adj. <, лат. cubicus. 1. Имеющий форму куба. шестигранника. Сл. 18. Большая голова кубической фигуры. С. Меран 20. Горница имела совершенно кубический вид. ТВЭО 50 14. 2. Связанный с объемом, измерением… … Исторический словарь галлицизмов русского языка
КОРЕНЬ — муж. корешек, шечек, коренек ·умалит. корнишка презрительное, корнища увеличительное, подземная часть всякого растения. У деревьев различают становой и боковые корни, а при них корешки и мелкие мочки. вбирающие влагу. Корень бывает: луковичный,… … Толковый словарь Даля
КУБИЧЕСКИЙ — КУБИЧЕСКИЙ, кубическая, кубическое. 1. прил. к куб1 в 1 и 4 знач. (мат.). Кубическая форма. Кубическая степень. Извлечь кубический корень. 2. Выраженный в мерах, за единицу объема которых принят куб. Кубическая система мер. Кубический метр.… … Толковый словарь Ушакова
кубический корень — — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом EN third root … Справочник технического переводчика
КОРЕНЬ ЧИСЛА — (root of number) Число х, чье значение в степени r равно у. Если у=хr, то х – корень r – степени от у. Например, в уравнении у=х2, х является квадратным корнем из у, и записывается следующим образом: x=√ y=y1/2; если z=x3, то х – кубический… … Экономический словарь
Таблица степеней по алгебре
На этой странице размещена таблица степеней от 2 до 10 для натуральных чисел от 1 до 20. Пример использования: находим в таблице число 9 (слева), затем во втором столбике видим квадрат числа, который равен 81. В третьем столбце таблицы значения кубов. Смотрите также: таблица квадратов, таблица корней.
https://uchim.org/matematika/tablica-stepenej — uchim.org
Таблица степеней
Пример: 23=8 Степень: Число 2 3 4 5 6 7 8 9 10 2 4 8 16 32 64 128 256 512 1 024 3 9 27 81 243 729 2 187 6 561 19 683 59 049 4 16 64 256 1 024 4 096 16 384 65 536 262 144 1 048 576 5 25 125 625 3 125 15 625 78 125 390 625 1 953 125 9 765 625 6 36 216 1 296 7 776 46 656 279 936 1 679 616 10 077 696 60 466 176 7 49 343 2 401 16 807 117 649 823 543 5 764 801 40 353 607 282 475 249 8 64 512 4 096 32 768 262 144 2 097 152 16 777 216 134 217 728 1 073 741 824 9 81 729 6 561 59 049 531 441 4 782 969 43 046 721 387 420 489 3 486 784 401 10 100 1 000 10 000 100 000 1 000 000 10 000 000 100 000 000 1 000 000 000 10 000 000 000 11 121 1 331 14 641 161 051 1 771 561 19 487 171 214 358 881 2 357 947 691 25 937 424 601 12 144 1 728 20 736 248 832 2 985 984 35 831 808 429 981 696 5 159 780 352 61 917 364 224 13 169 2 197 28 561 371 293 4 826 809 62 748 517 815 730 721 10 604 499 373 137 858 491 849 14 196 2 744 38 416 537 824 7 529 536 105 413 504 1 475 789 056 20 661 046 784 289 254 654 976 15 225 3 375 50 625 759 375 11 390 625 170 859 375 2 562 890 625 38 443 359 375 576 650 390 625 16 256 4 096 65 536 1 048 576 16 777 216 268 435 456 4 294 967 296 68 719 476 736 1 099 511 627 776 17 289 4 913 83 521 1 419 857 24 137 569 410 338 673 6 975 757 441 118 587 876 497 2 015 993 900 449 18 324 5 832 104 976 1 889 568 34 012 224 612 220 032 11 019 960 576 198 359 290 368 3 570 467 226 624 19 361 6 859 130 321 2 476 099 47 045 881 893 871 739 16 983 563 041 322 687 697 779 6 131 066 257 801 20 400 8 000 160 000 3 200 000 64 000 000 1 280 000 000 25 600 000 000 512 000 000 000 10 240 000 000 000 21 441 9 261 194 481 4 084 101 85 766 121 1 801 088 541 37 822 859 361 794 280 046 581 16 679 880 978 201 22 484 10 648 234 256 5 153 632 113 379 904 2 494 357 888 54 875 873 536 1 207 269 217 792 26 559 922 791 424 23 529 12 167 279 841 6 436 343 148 035 889 3 404 825 447 78 310 985 281 1 801 152 661 463 41 426 511 213 649 24 576 13 824 331 776 7 962 624 191 102 976 4 586 471 424 110 075 314 176 2 641 807 540 224 63 403 380 965 376 25 625 15 625 390 625 9 765 625 244 140 625 6 103 515 625 152 587 890 625 3 814 697 265 625 95 367 431 640 625 Свойства степени — 2 части
Таблица основных степеней по алгебре в компактном виде (картинка, удобно, чтобы распечатать), сверху числа, сбоку степени:
(можно открыть в новом окне, нажав на картинку)Полную математическую таблицу можно бесплатно скачать, просто сохранив картинку выше с помощью правой кнопки мыши.
Всё для учебы » Математика в школе » Таблица степеней по алгебре
Урок 16. арифметический корень натуральной степени — Алгебра и начала математического анализа — 10 класс
Алгебра и начала математического анализа, 10 класс
Урок №16 Название темы: Арифметический корень натуральной степени.
Перечень тем, рассматриваемых на уроке:
- преобразование и вычисление арифметических корней,
- свойства арифметического корня натуральной степени,
- корень нечетной степени из отрицательного числа,
- какими свойствами обладает арифметический корень натуральной степени.
Глоссарий
- Квадратным корнем из числа a называют такое число, квадрат которого будет равен a.
- Арифметическим квадратным корнем из числа а называют неотрицательное число, квадрат которого равен а.
- Кубический корень из а— это такое число, которое при возведении в третью степень дает число а.
- Корнем n-ой степени из числа a называют такое число, n-ая степень которого будет равна a.
- Арифметическим корнем натуральной степени, где n ≥ 2, из неотрицательного числа a называется неотрицательное число, n-я степень которого равна a.
Основная литература:
Колягин Ю.М., Ткачева М.В., Федорова Н.Е. и др., под ред. Жижченко А.Б. Учебно-методический комплект: Алгебра и начала математического анализа (базовый и профильный уровни). 10 кл.– М.: Просвещение, 2014.
- Сканави М. И., Зайцев В. В., Рыжков В. В. «Элементарная математика». – Книга по требованию, 2012.
- Семенова А.Л., Ященко И.В. ЕГЭ 3000 задач с ответами, математика под редакцией Москва, 2017.
- Ященко И. В. ЕГЭ 3300 задач с ответами, математика профильный уровень под редакцией Москва, 2017.
Объяснение темы «Арифметический корень натуральной степени»
Решим задачу.
Площадь квадрата S=16 м².
Обозначим сторону квадрата а, м.
Тогда, а² = 16.
Решим данное уравнение:
a=4 и а= –4.
Проверим решение:
4² = 16;
(–4)² = 16.
Ответ: длина стороны квадрата равна 4 м.
Определение:
Квадратным корнем из числа a называют такое число, квадрат которого будет равен a.
Определение:
Арифметическим квадратным корнем из числа а называют неотрицательное число, квадрат которого равен а.
Обозначение: .
Определение:
Кубический корень из а— это такое число, которое при возведении в третью степень дает число а.
Обозначение: .
Например:
.
.
.
На основании определений квадратного и кубического корней, можно сформулировать определения корня n-ой степени и арифметического корня n-ой степени.
Определение:
Корнем n-ой степени из числа a называют такое число, n-ая степень которого будет равна a.
Определение:
Арифметическим корнем натуральной степени, где n≥2, из неотрицательного числа a называется неотрицательное число, n-я степень которого равна a.
Обозначение: – корень n-й степени, где
n–степень арифметического корня;
а– подкоренное выражение.
Давайте рассмотрим такой пример: .
Мы знаем, что (–4)³ = –64, следовательно, .
Еще один пример: .
Мы знаем, что (–3)5 = –243, следовательно, .
На основании этих примеров, можно сделать вывод:
, при условии, что n –нечетное число.
Свойства арифметического корня натуральной степени:
Если а ≥ 0, b ≥ 0 и n, m – натуральные числа, причем n ≥ 2, m ≥ 2, то справедливо следующее:
- .
Примеры:
.
.
- .
Примеры:
.
.
- .
Пример:
.
- .
Пример:
.
- Для любогоа справедливо равенство:
Пример:
Найдите значение выражения , при 3 <x< 6.
Степени заданных арифметических корней 4 и 2, четные числа, следовательно, мы можем применить свойство №5:
=|x – 3| = х – 3, т.к. х>3;
=|x – 6|=6 – x, т.к. х<6.
Получаем: х – 3 + 6 – х= 3.
Примеры заданий.
Первый пример.
Задача:
Выберите верные утверждения:
Разбор задания.
Применим определение арифметического корня: Арифметическим корнем натуральной степени из неотрицательного числа a называется неотрицательное число, n-я степень которого равна a. Следовательно, верными могут быть только неотрицательные выражения.
Ответ: ; ;
Второй пример.
Задача:
Выделите самое маленькое число:
Разбор задания:
Корень из отрицательного числа будет отрицательным числом, следовательно, наименьшее число –
Ответ: 4.
Арифметический корень / math5school.ru
Арифметический корень
Свойства корней
Значения некоторых корней n-й степени
Таблица квадратных корней натуральных чисел от 1 до 99
Таблица кубических корней натуральных чисел от 1 до 99
Арифметический корень
Арифметическим корнем n-й степени из неотрицательного числа a называется неотрицательное число b, n-я степень которого равна a.
Записывается так:
Эта запись означает, что bn = a, где b и a – неотрицательные числа.
Число n называется показателем степени корня, число а – подкоренным выражением, b – значением арифметического корня n-й степени. Операция нахождения значения корня называется извлечением корня.
Корней чётной степени из отрицательных чисел не существует.
Корнем нечётной степени из отрицательного числа а называется такое отрицательное число b, которое при его возведении в эту нечётную степень равно числу а.
Для корней нечётной степени справедливо равенство:
Свойства корней
Для положительных а и b, натуральных n и k (n ≥ 2, k ≥ 2), целого m выполняются следующие соотношения.
Кроме того, для любого числа а верно:
Значения некоторых корней
n-й степени3√8 = 2 4√16 = 2 5√32 = 2 6√64 = 2 7√128 = 2 8√256 = 2 9√512 = 2 10√1024 = 2 3√27 = 3 4√81 = 3 5√243 = 3 6√729 = 3 7√2187 = 3 8√6561 = 3 9√19683 = 3 10√59049 = 3 3√64 = 4 4√256 = 4 5√1024 = 4 6√4096 = 4 7√16384 = 4 8√65536 = 4 9√262144 = 4 10√1048576 = 4 3√125 = 5 4√625 = 5 5√3125 = 5 6√15625 = 5 7√78125 = 5 8√390625 = 5 9√1953125 = 5 10√9765625 = 5 3√216 = 6 4√1296 = 6 5√7776 = 6 6√46656 = 6 7√279936 = 6 8√1679616 = 6 9√10077696 = 6 10√60466176 = 6 3√343 = 7 4√2401 = 7 5√16807 = 7 6√117649 = 7 7√823543 = 7 8√5764801 = 7 9√40353607 = 7 10√282475249 = 7 Смотрите также:
Таблицы чисел
Алгебраические тождества
Степени
Логарифмы
Графики элементарных функций
Построение графиков функций геометрическими методами
Тригонометрия
Таблицы значений тригонометрических функций
Треугольники
Четырёхугольники
Многоугольники
Окружность
Площади геометрических фигур
Прямые и плоскости
Многогранники
Тела вращения
Таблица квадратных корней | Алгебра
В таблице приведены квадратные корни натуральных чисел от 1 до 100.
√1 = 1
√4 = 2
√9 = 3
√16 = 4
√25 = 5
√36 = 6
√49 = 7
√64 = 8
√81 = 9
√100 = 10√121 = 11
√144 = 12
√169 = 13
√196 = 14
√225 = 15
√256 = 16
√289 = 17
√324 = 18
√361 = 19
√400 = 20√441 = 21
√484 = 22
√529 = 23
√576 = 24
√625 = 25
√676 = 26
√729 = 27
√784 = 28
√841 = 29
√900 = 30√961 = 31
√1024 = 32
√1089 = 33
√1156 = 34
√1225 = 35
√1296 = 36
√1369 = 37
√1444 = 38
√1521 = 39
√1600 = 40√1681 = 41
√1764 = 42
√1849 = 43
√1936 = 44
√2025 = 45
√2116 = 46
√2209 = 47
√2304 = 48
√2401 = 49
√2500 = 50√2601 = 51
√2704 = 52
√2809 = 53
√2916 = 54
√3025 = 55
√3136 = 56
√3249 = 57
√3364 = 58
√3481 = 59
√3600 = 60√3721 = 61
√3844 = 62
√3969 = 63
√4096 = 64
√4225 = 65
√4356 = 66
√4489 = 67
√4624 = 68
√4761 = 69
√4900 = 70√5041 = 71
√5184 = 72
√5329 = 73
√5476 = 74
√5625 = 75
√5776 = 76
√5929 = 77
√6084 = 78
√6241 = 79
√6400 = 80√6561 = 81
√6724 = 82
√6889 = 83
√7056 = 84
√7225 = 85
√7396 = 86
√7569 = 87
√7744 = 88
√7921 = 89
√8100 = 90√8281 = 91
√8464 = 92
√8649 = 93
√8836 = 94
√9025 = 95
√9216 = 96
√9409 = 97
√9604 = 98
√9801 = 99
√10000 = 100Решение корней в онлайн калькуляторе
Решение корней — одна из многих функций, которой обладает бесплатный калькулятор, размещенный на нашем сайте. Извлечение корня из числа часто используется в различных расчетах, а наш калькулятор — это отличный инструмент для подобных математических вычислений.
Онлайн калькулятор с корнями позволит быстро и просто сделать любые расчеты, содержащие извлечение корня. Корень третьей степени калькулятор онлайн посчитает также легко, как и квадратный корень из числа, корень из отрицательного числа, корень из комплексного числа, корень из числа пи и т.д.
Вычисление корня из числа возможно вручную. Если есть возможность вычислить целый корень числа, то просто находим значение подкоренного выражения по таблице корней. В остальных случаях приближенное вычисление корней сводится к разложению подкоренного выражения на произведение более простых множителей, которые являются степенями и их можно убрать за знак корня, максимально упрощая выражение под корнем.
Но не стоит использовать такое решение корня. И вот, почему. Во-первых, придется потратить массу времени на подобные расчеты. Числа в корне, а точнее сказать, выражения могут быть достаточно сложными, а степень не обязательно квадратичной или кубической. Во-вторых, не всегда устраивает точность таких вычислений. И, в-третьих, есть онлайн калькулятор корней, который сделает за вас любое извлечение корня в считанные секунды.
Извлечь корень из числа — значит найти такое число, которое при его возведении в степень n будет равно значению подкоренного выражения, где n — это степень корня, а само число — основание корня. Корень 2 степени называют простым либо квадратным, а корень третьей степени — кубическим, опуская в обоих случаях указание степени.
Решение корней в онлайн калькуляторе сводится лишь к написанию математического выражения в строке ввода. Извлечение из корня в калькуляторе обозначается как sqrt и выполняется с помощью трех клавиш — извлечение квадратного корня sqrt(x), извлечение корня кубического sqrt3(x) и извлечение корня n степени sqrt(x,y). Более детальная информация о панели управления представлена на странице кнопки калькулятора онлайн.
Извлечение квадратного корня
Нажатие этой кнопки вставит в строке ввода запись извлечения из квадратного корня: sqrt(x), вам нужно только внести подкоренное выражение и закрыть скобку.
Пример решения квадратных корней в калькуляторе:
Если под корнем отрицательное число, а степень корня четная, то ответ будет представлен в виде комплексного числа с мнимой единицей i.
Квадратный корень из отрицательного числа:
Корень третьей степени
Используйте эту клавишу, когда нужно извлечь кубический корень. Она вставляет в строке ввода запись sqrt3(x).
Корень 3 степени:
Корень степени n
Естественно, онлайн калькулятор корней позволяет извлекать не только квадратный и кубический корень из числа, но также корень степени n. Нажатие этой кнопки выведет запись вида sqrt(x x,y).
Корень 4 степени:
Точный корень n степени из числа можно извлечь только, если само число является точным значением степени n. В противном же случае расчет получится приблизительным, хотя и очень близким к идеалу, так как точность вычислений онлайн калькулятора достигает 14 знаков после запятой.
Корень 5 степени с приблизительным результатом:
Корень из дроби
Вычислить корень калькулятор может из различных чисел и выражений. Нахождение корня дроби сводится к отдельному извлечению корня из числителя и знаменателя.
Квадратный корень из дроби:
Корень из корня
В случаях когда корень выражения находится под корнем, по свойству корней их можно заменить одним корнем, степень которого будет равняться произведению степеней обоих. Проще говоря, чтобы извлечь корень из корня, достаточно перемножить показатели корней. В приведенном на рисунке примере выражение корень третьей степени корня второй степени можно заменить одним корнем 6-ой степени. Указывайте выражение так, как вам удобно. Калькулятор в любом случае все рассчитает верно.
Пример, как извлечь корень из корня:
Степень в корне
Выполняя извлечение корня степени, следует помнить, что по свойству корней степень самого корня и степень под корнем по возможности сокращаются на наибольший общий делитель (НОД). Кстати, функционал калькулятора включает также нахождение НОД, подробнее на странице дополнительные функции.
Корень степени калькулятор позволяет рассчитать в одно действие, без предварительного сокращения показателей корня и степени.
Квадратный корень из степени:
Все функции нашего бесплатного калькулятора собраны в одном разделе. Функции онлайн калькулятора >>
Кубический корень: онлайн калькулятор, график, формулы
Кубический корень числа А — это такое число В, которое при возведении в третью степень в результате дает число А. Вычисление кубического корня — более сложная задача, нежели поиск квадратных корней.
Обозначение
Корни чисел ранее обозначались символом Rx, от латинского слова radix, то есть корень. Именно поэтому синонимом арифметических корней стало слово «радикал». Позднее для удобства типографской записи корни стали обозначаться латинской буквой V, а надстрочный знак перед символом указывает на степень корня. Для упрощения обозначения кубических корней в этой статье мы будем использовать слово cube. Это означает, что cube(8) следует читать как «кубический корень из 8».
Алгоритм приблизительных вычислений
Кубический корень положительного или отрицательного числа А — это соответственно положительное или отрицательное В, которое при возведении в куб дает число А. Пусть требуется найти cube(27).
Для поиска корней используется следующий алгоритм рассуждений. Какое число нужно умножить на само себя 3 раза, чтобы получить 27? Посчитаем, что 2 × 2 × 2 = 8, а 3 × 3 × 3 = 27, следовательно, cube(27) = 3. Это простой целочисленный пример. Но что делать, если требуется найти cube(45)? Попробуем тот же алгоритм: 3 × 3 × 3 = 27, 4 × 4 × 4 = 64. Из этого следует, что кубический корень из 45 — это иррациональное число, которое находится в диапазоне 3 > cube(45) < 4. Число 45 находится приблизительно на половине пути между 27 и 64, поэтому можно предположить, что cube(45) = 3,5. Это грубая оценка кубического корня, которую можно использовать для приблизительных расчетов.
Помимо метода определения «на глазок», существует алгоритм расчета кубического корня больших чисел в столбик:
- для начала число разделяется на группы чисел по три, начиная с правого конца, например, число 1234561789 будет выглядеть как 1 234 561 789;
- после этого для каждой группы цифр требуется найти такой целочисленный кубический корень, который при увеличении на 1 и возведении в куб становится больше заданного числа;
- далее следует записать полученный куб под группой цифр и произвести вычитание;
- затем требуется ниже записать результат вычитания и снести вторую группу цифр;
- после чего повторить алгоритм.
Точное значение такого корня найти невозможно, так как кубические корни для некубических чисел — это всегда бесконечные и непериодическое иррациональные числа. А что такое кубические числа?
Последовательность кубических чисел
Кубическое число — это такое натуральное число, кубический корень которого является целым числом. Кубическая последовательность формируется из натурального ряда, каждый член которого возведен в третью степень. Начало кубической последовательности выглядит следующим образом:
0, 1, 8, 27, 64, 125, 216, 343, 512, 729…
Очевидно, что 8 = 23, 27 = 33, a 64 = 43 и так далее. Кубические корни любого числа из последовательности кубов являются целыми. Геометрически такие числа иллюстрируются объемом куба, ребро которого равно целочисленному корню числа. Например, число 64 — это объем куба с ребром длиной 4 см.
Кубическая последовательность растет довольно быстро, и в отличие от квадратов чисел, куб может оканчиваться на любую цифру. Так как количество натуральных чисел уходит в бесконечность, то и количество кубов также бесконечно, однако целочисленных значений все же гораздо меньше, чем иррациональных.
Наша программа представляет собой универсальный калькулятор вычисления корней любой степени. Для того, чтобы вычислить значение кубического корня вам потребуется указать заданное число в ячейку «Число(x)», а ячейке «Степень(n)» требуется ввести значение степени. По умолчанию калькулятор выставляет в «Степень(n)» число 3, поэтому вы сразу можете вычислять кубические корни, не устанавливая степень корня.
Пример работы калькулятора
Вычисление ребра куба
Классическая задача на вычисление кубического корня — это определение длины ребра куба, если известен его объем. Для значений объема из кубической последовательности все просто, так как ответ будет записан в виде целого числа. Для всех остальных значений нам пригодится онлайн-калькулятор. Давайте вычислим длины ребер для следующих объемов кубов:
- Cube(10) = 2,1544;
- Cube(25) = 2,9240;
- Cube(50) = 3,6840;
- Cube(75) = 4,2172;
- Cube(100) = 4,6416.
Как видите, в диапазоне от 10 до 100 длина ребра изменятся всего на 2,5 пункта.
Заключение
Поиск кубического корня — сложная задача, если вычислять значение требуется для больших или некубических чисел. Для определения значения кубического корня заданной точности используйте наш онлайн-калькулятор — простой инструмент для быстрых вычислений, который идеально подойдет школьникам и студентам.
квадратный корень из 64 — Как найти квадратный корень из 64?
64 — это точное квадратное число, которое можно получить квадратом 8. Следовательно, квадратный корень из 64 является рациональным числом. В этом мини-уроке мы научимся находить квадратный корень из 64 вместе с решенными примерами. Давайте посмотрим, что такое квадратный корень из 64.
- Квадратный корень из 64 : √ 64 = 8
- Квадрат 64: 64 2 = 4096
Что такое квадратный корень из 64?
Квадратный корень из 64 — это число, квадрат которого дает исходное число.
√ 64 = 8
Ответ, полученный при возведении в квадрат 8, равен 64. Следовательно, 64 — это полный квадрат.
Является ли квадратный корень из 64 рациональным или иррациональным?
Рациональное число является завершающим или не завершающим и имеет повторяющийся образец в своей десятичной части. Мы видели, что √ 64 = 8. 8 — целое число, и его можно выразить в форме p / q. Следовательно, √ 64 — рациональное число.
Как найти квадратный корень из 64?
Существуют разные способы найти квадратный корень из любого числа.Щелкните здесь, чтобы узнать об этом подробнее.
64 — составное число. Множители 64: 1, 2, 4, 8, 16, 32 и 64.
Чтобы найти квадратный корень из 64, мы сделаем следующее.
- Мы воспользуемся методом разложения на простые множители, чтобы получить одно число из каждой пары одинаковых чисел, и мы умножим их. Разложение 64 на множители равно 2 × 2 × 2 × 2 × 2 × 2, что включает 3 пары одинаковых чисел 2. Таким образом, квадратный корень из 64 равен 2 × 2 × 2 = 8.
- Так как 64 — это полный квадрат, мы также можем выразить его как 8 × 8 = 64.Число внутри квадратного корня, которое повторяется, равно 8. Следовательно, квадратный корень из 64 равен 8.
Квадратный корень из 64 равен 8.
Исследуйте квадратные корни с помощью иллюстраций и интерактивных примеров
Важные примечания:
- 64 — это полный квадрат, поскольку ответ, полученный после нахождения квадратного корня, является рациональным числом.
- Квадратный корень из 64 можно упростить до 8, используя разложение на простые множители 64 или выразив 64 как квадрат 8.
Аналитический центр:
- Может ли квадратный корень из 64 быть десятичным значением?
- Является ли √ -64 действительным числом?
Часто задаваемые вопросы о квадратном корне из 64
Каковы два квадратных корня из 64?
Квадратный корень из 64 равен -8 и +8.
Является ли 64 идеальным квадратом?
Да, 64 — это идеальный квадрат.
Есть ли в 64 квадратный корень?
Да, 64 имеет квадратный корень.
Можно ли упростить квадратный корень из 64?
64 можно разделить на 2 × 2 × 2 × 2 × 2 × 2 или 8 × 8.Квадратный корень из 64 дает результат 8.
Является квадратный корень из 64 рациональным или иррациональным?
Квадратный корень из 64 является рациональным.
Является ли квадратный корень из 64 действительным числом?
Да, квадратный корень из 64 — действительное число.
кубический корень из 64 — как найти кубический корень из 64? [Решено]
Кубический корень из 64 равен 4. Это реальное решение уравнения x 3 = 64. Кубический корень из 64 выражается как ∛64 в радикальной форме и как (64) ⅓ или ( 64) 0.33 в экспоненциальной форме. Поскольку кубический корень из 64 является целым числом, 64 — это идеальный куб.
- Кубический корень из 64: 4
- Кубический корень из 64 в экспоненциальной форме: (64) ⅓
- Кубический корень из 64 в радикальной форме: ∛64
Что такое кубический корень из 64?
Кубический корень из 64 — это число, которое при трехкратном умножении на себя дает произведение 64. Поскольку 64 можно выразить как 2 × 2 × 2 × 2 × 2 × 2.Следовательно, кубический корень из 64 = ∛ (2 × 2 × 2 × 2 × 2 × 2) = 4.
Как рассчитать значение кубического корня из 64?
В этом разделе мы узнаем, как поэтапно вычислить кубический корень из 64.
Кубический корень из 64 путем простой факторизации
- Шаг 1 : Определите разложение на простые множители 64, т. Е. 64 = 2 × 2 × 2 × 2 × 2 × 2
- Шаг 2 : Сгруппируйте простые множители 64 в группы по три в каждой. 64 = (2 × 2 × 2) × (2 × 2 × 2) = 2 3 × 2 3
- Шаг 3 : Используйте закон экспонент: 64 = 2 3 × 2 3 = 4 3
- Шаг 4 : Извлеките кубический корень из обеих частей уравнения.
Следовательно, кубический корень из 64 путем разложения на простые множители равен (2 × 2 × 2 × 2 × 2 × 2) 1/3 = 4.
Является ли кубический корень 64 иррациональным?
Нет, потому что ∛64 = ∛ (2 × 2 × 2 × 2 × 2 × 2) может быть выражено в форме p / q, т.е. 4/1. Следовательно, значение кубического корня из 64 является целым (рациональным).
☛ Также проверьте:
Кубический корень из 64 решенных примеров
Пример 1. Найдите действительный корень уравнения x 3 — 64 = 0.
Решение:
x 3 — 64 = 0, т.е. x 3 = 64
Решение относительно x дает нам
x = ∛64, x = ∛64 × (-1 + √3i)) / 2 и x = ∛64 × (-1 — √3i)) / 2
где i называется мнимой единицей и равен √-1.
Игнорирование мнимых корней,
х = ∛64
Следовательно, действительный корень уравнения x 3 — 64 = 0 равен x = ∛64 = 4.Пример 2: Объем сферического шара равен 64π в 3 .Каков радиус этого шара?
Решение:
Объем сферического шара = 64π дюйм 3
× 4 (∵ ∛ (3/4) = 0, и ∛64 = 4)
= 4/3 × π × R 3
⇒ R 3 = 3/4 × 64
⇒ R = ∛ (3/4 × 64) = ∛ (3/4) × ∛64 = 0,
⇒ R = 3,63424 дюйм 3Пример 3: Каково значение ∛64 ÷ ∛ (-64)?
Решение:
Кубический корень -64 равен отрицательному значению кубического корня 64.
⇒ ∛-64 = -64Следовательно,
⇒ ∛64 / ∛ (-64) = ∛64 / (- ∛64) = -1
перейти к слайду перейти к слайду
Готовы увидеть мир глазами математиков?
Математика лежит в основе всего, что мы делаем. Наслаждайтесь решением реальных математических задач на живых занятиях и станьте экспертом во всем.
Забронируйте бесплатную пробную версию Класс
FAQ по Cube Root из 64
Что такое кубический корень из 64?
Мы можем выразить 64 как 2 × 2 × 2 × 2 × 2 × 2 i.е. ∛64 = ∛ (2 × 2 × 2 × 2 × 2 × 2) = 4. Следовательно, значение кубического корня из 64 равно 4.
Как упростить кубический корень 64/125?
Мы знаем, что кубический корень из 64 равен 4, а кубический корень из 125 равен 5. Следовательно, ∛ (64/125) = (∛64) / (∛125) = 4/5 = 0,8.
Является ли 64 идеальным кубом?
Число 64 в разложении на простые множители дает 2 × 2 × 2 × 2 × 2 × 2. Объединение простых множителей в группы по 3 дает 4. Таким образом, кубический корень из 64 = (2 × 2 × 2 × 2 × 2 × 2) = 4 (идеальный куб).
Если кубический корень 64 равен 4, найдите значение 0,064 фунта стерлингов.
Представим ∛0,064 в форме p / q, т.е. ∛ (64/1000) = 4/10 = 0,4. Следовательно, значение ∛0,064 = 0,4.
Почему кубический корень равен 64 рациональным?
Значение кубического корня из 64 может быть выражено в виде p / q, т.е. = 4/1, где q 0. Следовательно, ∛64 является рациональным.
Какое значение кубического корня -64?
Мы знаем, что кубический корень отрицательных чисел отрицательный.
- Запишите -64 как произведение его простых множителей: -64 = — (2 × 2 × 2 × 2 × 2 × 2)
- Сгруппируйте факторы в группы по три в каждой: -64 = -2 3 × 2 3 = -4 3
- Возьмите кубический корень с обеих сторон уравнения: 3 √ -64 = 3 √ -4 3 = -4
Следовательно, кубический корень из -64 равен -4.
Определить, является ли кубический корень из 64 минус кубический корень из 8 рациональным числом?
Кубический корень из 64 и 8 равен 4 и 2 соответственно i.е. 3 √ 64 — 3 √ 8 = 4 — 2 = 2. Следовательно, разница между кубическим корнем из 64 и кубическим корнем из 8 является рациональным числом.
Что такое кубик корня из 64?
Куб кубического корня из 64 — это само число 64, т.е. (∛64) 3 = (64 1/3 ) 3 = 64.
Корень (числа) — определение математического слова
Корень (числа) — определение математического слова — Открытый справочник по математикеКорень числа x — это другое число, которое при умножении на себя заданное количество раз дает x.
Например, третий корень (также называемый кубическим корнем) из 64 равен 4, потому что если вы умножите три четверки вместе, вы получите 64:
4 × 4 × 4 = 64
Это было бы записано как Вышеупомянутое будет означать «третий корень из 64 равен 4» или «кубический корень из 64 равен 4» .- Второй корень обычно называют «квадратным корнем».
- Третий корень числа обычно называют «кубическим корнем»,
- После этого они называются корнем n, например корень 5, корень 7 и т. Д.
Иногда бывает два корня
Для каждого корня четной степени (например, 2-го, 4-го, 6-го….) есть два корня. Это потому, что умножение двух положительных или двух отрицательных чисел дает положительный результат. Например, рассмотрим квадратный корень из 9.
Какое число, умноженное на само себя, даст 9?
Очевидно 3 будут работать:3 × 3 = 9
Но так будет -3:-3 × -3 = 9
Когда таких корней два, если не указано иное, мы имеем в виду положительный. Строго говоря, когда мы пишем √ 4, мы имеем в виду положительный корень, +2.Это называется «главный корень».
Корни отрицательных чисел
У отрицательных чисел нет реальных корней четного порядка. Например, квадратного корня из -9 не существует, потому что -3 × -3 = + 9, а также +3 × +3 = + 9. Это относится ко всем корням четного порядка, 2-му (квадратному) корню, 4-му корню, 6-му корню и так далее.
Однако — это корня нечетного порядка отрицательных чисел. Например, –3 — это кубический корень из –27. Это потому что –3 × –3 × –3 = –27.Первые два члена при умножении дают +9, затем следующее умножение дает
+9 × –3 = –27. Это относится ко всем корням нечетного порядка, таким как 3-й (кубический) корень, 5-й корень, 7-й корень и т. Д.Мнимые числа
Выше сказано, что действительного квадратного корня из отрицательного числа не существует. Обратите внимание на слово «настоящий». Это говорит о том, что нет настоящий номер это квадратный корень отрицательного числа.
Однако в математике и инженерии нам часто нужно найти квадратный корень из отрицательного числа.Чтобы решить эту проблему, мы вводим понятие «мнимого» числа. Он включает в себя символ i , который обозначает квадратный корень из отрицательного числа. Или, другими словами, i 2 = –1
На практике мы можем использовать его для выражения квадратного корня из любого отрицательного числа. Например Это означает, что квадратный корень из –25 — это квадратный корень из +25, умноженный на квадратный корень из отрицательной единицы.
Подробнее о мнимых числах см. Мнимые числа.
Символы
Радиканд
Вещь, корень которой вы находите.Радикальный символ
Символ √ , означающий «корень из». Длина турника важна. См. Примечание ниже.Степень
Сколько раз подкоренное выражение умножается само на себя. 2 означает квадратный корень, 3 означает кубический корень. После этого они называются корнем 4-й, 5-й и так далее. Если он отсутствует, предполагается, что это 2 — квадратный корень.Другой способ записи
Корни также можно записать в экспоненциальной форме. В общем Так, например, кубический корень x будет записан Что будет произноситься как «х в степени одной трети».
Другие экспоненты и основные темы
(C) Открытый справочник по математике, 2011 г.
Калькулятор кубического корня
Все права защищены.| Определение
Наш калькулятор кубического корня — удобный инструмент, который поможет вам определить кубический корень, также называемый корнем 3 rd , любого положительного числа . Вы можете сразу воспользоваться нашим калькулятором; просто введите число, из которого вы хотите найти кубический корень, и готово! Более того, вы можете делать вычисления наоборот и использовать их для кубических чисел.Для этого просто введите в последнее поле число, которое вы хотите возвести в третью степень! Это может быть чрезвычайно полезно при поиске так называемых идеальных кубиков . Подробнее о них вы можете прочитать в следующей статье.
Благодаря нашему калькулятору кубического корня вы также можете вычислить корни из других степеней . Для этого вам нужно изменить число в градусах корневого поля . Если вы хотите узнать больше об определении корня куба, ознакомиться со свойствами функции корня куба и найти список префектных кубов, мы настоятельно рекомендуем вам продолжить чтение этого текста.Там вы также можете найти некоторые уловки, как найти кубический корень на калькуляторе или как вычислить его в уме.
Если вас интересует история символа корня, перейдите к калькулятору квадратного корня, где мы ее обсудим. Кроме того, не забудьте попробовать другие наши математические калькуляторы, такие как калькулятор наибольшего общего множителя или калькулятор гиперболических функций.
Определение кубического корня
Предположим, вы хотите найти кубический корень числа x . Кубический корень y — это такое число, которое, если возвести его в третью степень, даст в результате x .(1/3)
Геометрический пример может помочь вам понять это. Лучший пример, который мы можем привести, — это куб. Итак, кубический корень объема куба — это длина его ребра. Так, например, если куб имеет объем 27 см³, то длина его граней равна кубическому корню из 27 см³, что составляет 3 см. Легкий?
Вы должны помнить, что в большинстве случаев кубический корень не будет рациональным числом . Эти числа могут быть выражены как частное двух натуральных чисел, т.е.е. фракция. Дроби могут вызвать определенные трудности, особенно когда дело касается их сложения. Если у вас возникли проблемы с нахождением общего знаменателя двух дробей, воспользуйтесь нашим калькулятором НОК, который вычисляет наименьшее общее кратное двух заданных чисел.
Что такое кубический корень из …?
С помощью нашего калькулятора кубического корня действительно легко найти кубический корень любого положительного числа! Просто введите любое число, чтобы найти его кубический корень. Например, кубический корень из 216 равен 6. Чтобы просмотреть список идеальных кубиков, перейдите к следующему разделу.
Обратите внимание, что можно найти кубический корень и из отрицательного числа, в конце концов, отрицательное число в третьей степени все еще отрицательно — например,
(-6) ³ = -216.Однако вы должны помнить, что любое ненулевое число имеет три кубических корня: по крайней мере, один действительный и два мнимых. Этот калькулятор кубического корня работает только с действительными числами, но, если вам интересно, мы рекомендуем вам прочитать больше о мнимых числах!
Наиболее распространенные значения — список perfect cubes
Ниже приведены наиболее распространенные значения кубического корня.Эти числа также очень часто называют идеальных кубов , потому что их кубические корни являются целыми числами. Вот список из десяти первых идеальных кубиков:
- кубический корень из 1:
∛1 = 1, так как1 * 1 * 1 = 1; - кубический корень из 8:
∛8 = 2, так как2 * 2 * 2 = 8; - кубический корень из 27:
∛27 = 3, так как3 * 3 * 3 = 27; - кубический корень из 64:
∛64 = 4, так как4 * 4 * 4 = 64; - кубический корень из 125:
∛125 = 5, так как5 * 5 * 5 = 125; - кубический корень из 216:
∛216 = 6, так как6 * 6 * 6 = 216; - кубический корень из 343:
∛343 = 7, так как7 * 7 * 7 = 343; - кубический корень из 512:
∛512 = 8, так как8 * 8 * 8 = 512; - кубический корень из 729:
∛729 = 9, так как9 * 9 * 9 = 729; - кубический корень из 1000:
∛1000 = 10, так как10 * 10 * 10 = 1000;
Как видите, числа очень быстро становятся очень большими, но иногда вам придется иметь дело с еще большими числами, такими как факториалы.В этом случае мы рекомендуем использовать научную нотацию, которая является гораздо более удобным способом записывать действительно большие или очень маленькие числа.
С другой стороны, большинство других чисел не являются идеальных кубиков , но некоторые из них все еще используются часто. Вот список некоторых несовершенных кубов с округлением до сотых:
- кубический корень из 2:
∛2 ≈ 1,26; - кубический корень из 3:
∛3 ≈ 1,44; - кубический корень из 4:
∛4 ≈ 1.59; - кубический корень из 5:
∛5 ≈ 1,71; - кубический корень из 10:
∛10 ≈ 2,15;
Не сомневайтесь, воспользуйтесь нашим калькулятором кубического корня, если нужного вам числа нет в этом списке!
Функция кубического корня и график
Вы можете построить график функции
y = ∛ (x). В отличие от, например, логарифмическая функция, функция кубического корня является нечетной функцией — это означает, что она симметрична относительно начала координат и удовлетворяет условию- f (x) = f (-x).Эта функция также проходит через ноль.Благодаря этой функции вы можете построить график корня куба, который показан ниже. Мы также рекомендуем вам воспользоваться калькулятором квадратичных формул, чтобы узнать о других функциональных формулах!
Как вычислить кубический корень в голове?
Как вы думаете, можно ли решить простые задачи с кубическими корнями без онлайн-калькулятора или даже карандаша или бумаги? Если вы думаете, что это невозможно или что вы не в состоянии сделать это, воспользуйтесь этим методом, это очень просто.Однако работает только для идеальных кубиков . Забудьте обо всех правилах из учебников по арифметике и на мгновение подумайте о следующем методе, описанном Робертом Келли.
Прежде всего, необходимо запомнить кубики чисел от 1 до 10 и последнюю цифру их кубиков. Он представлен в таблице ниже.
Номер 1 2 3 4 5 6 7 8 9 10 Куб 1 8 27 64 126 216 343 512 729 1000 Последняя цифра 1 8 7 4 5 6 3 2 9 0 Если у вас есть число, которое вы хотите найти кубический корень, сначала посмотрите на тысячи (пропустите последние три цифры).Например, для числа 185 193 тысячи равны 185. Куб из 5 равен 125, а из 6 — 216. Следовательно, очевидно, что число, которое вы ищете, находится между 50 и 60. Следующим шагом является игнорирование все остальные цифры, кроме последней цифры. Мы видим, что это 3, так что проверьте свою память или в нашей таблице. Вы обнаружите, что число, которое вы ищете, — 7. Итак, ответ: 57 ! Легкий?
Давайте возьмем еще один пример и сделаем это шаг за шагом!
- Подумайте о числе, которое вы хотите узнать как кубический корень.Возьмем 17576 .
- Пропустить три последние цифры.
- Найдите два ближайших известных вам кубических корня. Кубический корень из 8 равен 2, а кубический корень из 27 равен 3. Таким образом, ваше число находится между 20 и 30.
- Посмотрите на последнюю цифру. Последняя цифра 17576 — 6.
- Проверьте свою память (или по нашей таблице) — последняя цифра 6 соответствует цифре 6. Это последняя цифра вашего числа.
- Объедините два: 26 . Это кубический корень из 17576!
Напоминаем, что этот алгоритм работает только для идеальных кубиков! А вероятность того, что случайное число является идеальным кубом, увы, очень мала.У вас есть только 0,0091% шанс найти человека между 1 000 и 1 000 000. Если вы не уверены в своем числе, просто забудьте об этом правиле и воспользуйтесь нашим калькулятором кубического корня 🙂
Как найти кубический корень на обычном калькуляторе?
- Сначала нужно набрать число, для которого нужно найти кубический корень
- Нажмите
√(корневой ключ) два раз - Пресс
x(множественный знак) - Нажмите
√(корневой ключ) четыре раз - Пресс
x(множественный знак) - Нажмите
√(корень) восемь раз - Пресс
x(множественный знак) - В последний раз нажмите
√(корневой ключ) два раз - А теперь можно нажать
=(знак равенства)! Вот тебе ответ!
Вы не верите? Проверьте это еще раз на другом примере!
Примеры вопросов с кубическим корнем
Допустим, вам нужно сделать шар объемом 33.5 мл. Для его приготовления нужно знать его радиус. Как вы, наверное, знаете, уравнение для вычисления объема шара выглядит следующим образом:
V = (4/3) * π * r³Итак, уравнение для радиуса выглядит так:
r = ∛ (3V / 4π)Вы знаете, что объем 33,5 мл. Сначала вам нужно переключиться на другие единицы громкости. Самый простой перевод в см³: 33,5 мл = 33,5 см³. Теперь вы можете решить радиус:
r = ∛ (100.5 / 12,56)г = ∛ (8)г = 2Чтобы шар имел объем 33,5 мл, его радиус должен составлять 2 сантиметра.
Калькулятор энного корня
С помощью нашего калькулятора корней вы также можете рассчитать другие корни. Просто введите число в поле Degree of the root , и вы получите любой выбранный калькулятор корня n-й степени . Наш калькулятор автоматически сделает все необходимые расчеты, и вы можете свободно использовать его в своих расчетах!
Итак, давайте рассмотрим несколько примеров.Предположим, вам нужно вычислить корень четвертой степени из 1296 . Сначала вам нужно написать соответствующее число, которое вы хотите получить root — 1296. Затем измените степень корня на 4 . И вот результат! Корень четвертой степени из 1296 — 6 .
Наш калькулятор корня n-й степени также позволяет вычислять корень иррациональных чисел. Попробуем вычислить π-го корня . Символ π представляет собой отношение длины окружности к ее диаметру.Его значение постоянно для каждого круга и составляет примерно 3,14. Допустим, вы хотите вычислить корень π-й степени из 450 . Сначала напишите 450 в поле номер . Затем изменим степень корня на — округлим и напишем вместо π 3,14 . И теперь вы можете увидеть результат. Это почти 7 .
Три решения кубического корня
В конце этой статьи мы подготовили раздел продвинутой математики для самых настойчивых из вас.Вы, наверное, знаете, что положительные числа всегда имеют два квадратных корня: отрицательный и положительный. Например,
√4 = -2и√4 = 2. Но знаете ли вы, что подобное правило применяется к кубическим корням? Все действительные числа (кроме нуля) имеют ровно три кубических корня : одно действительное число и пару комплексных. Комплексные числа были введены математиками давным-давно, чтобы объяснить проблемы, с которыми не могут справиться действительные числа. Обычно мы выражаем их в следующем виде:х = а + б * я, где
x— комплексное число с действительнойaи мнимойbчастями (для действительных чиселb = 0).Загадочное воображаемое числоiопределяется как квадратный корень из-1:я = √ (-1)Хорошо, но как это знание влияет на количество решений кубического корня? В качестве примера рассмотрим кубические корни из
8, которые равны2,-1 + i√3и-1 - i√3. Если вы нам не верите, давайте проверим это, возведя их в степень 3, вспомнив, чтоi² = -1и используя короткую формулу умножения(a + b) ³ = a³ + 3a²b + 3ab² + b³:-
2³ = 8— очевидное, -
(-1 + i√3) ³ = -1 + 3i√3 + 9 - 3i√3 = 8, -
(-1 - i√3) ³ = -1 - 3i√3 + 9 + 3i√3 = 8.
Теперь вы видите? Все они равны
8!Калькулятор четвертого корня — впечатляющий калькулятор четвертого корня
Онлайн калькулятор четвертого корня:
Воспользуйтесь нашим онлайн калькулятором четвертого корня.
Рекламные объявленияПример корня 4-й степени из x
- Корень 4-й степени из 9 составляет ± 1,7320
- Корень 4-й степени из 16 составляет ± 2
- Корень 4-й степени из 27 составляет ± 2,279
- Корень 4-й степени из 48 составляет ± 2,632
- Корень 4-й степени из 64 составляет ± 2,828
- Корень четвертой степени из 81 составляет ± 3
- Корень четвертой степени из 216 составляет ± 3.833
- Корень четвертой степени из 256 составляет ± 4
- Корень четвертой степени из 625 составляет ± 5
- Корень четвертой степени из 4096 составляет ± 8
Формула вычисления четвертого корня:
a 4 = x.
∜x = a
Формула четвертого корняОпределение четвертого корня:
Определение четвертого корня :
В математике четвертый корень числа x является числом r , что при возведении в степень 4 дает x:
r 4 = x.
Определение четвертого корня:Идеальные четвертые корни:
Совершенные четвертые корниЧетвертый корень X 4√x Четвертый корень 1 1 2 Четвертый корень из 81 3 Четвертый корень из 256 4 Четвертый корень из 625 5 6 Четвертый корень Корень четвертой степени 2401 7 Корень четвертой степени 4096 8 Корень четвертой степени 6561 9 Корень четвертой степени 10000 10 11 Четвертый корень 20736 12 Таблица четвертого корня:
Диаграмма четвертого корняКорень четвертой степени X 4√x Корень четвертой степени X 4√x Корень четвертой степени 1 1 Корень четвертой степени 2698 2,2581 Корень четвертой степени 2 1,1892 Корень четвертой степени 27 2,2795 Корень четвертой степени 3 1,3161 Корень четвертой степени 28 2, 3003 Корень четвертой степени из 4 1,4142 Корень четвертой степени из 29 2,3206 Корень четвертой степени из 5 1,4953 Корень четвертой степени 30 2,3403 Корень четвертой степени из 6 1,5651 Корень четвертой степени из 31 2,3596 Корень четвертой степени из 7 1,6266 Корень четвертой степени из 32 2,3784 Четвертый р oot 8 1,6818 Корень четвертой степени 33 2,3968 Корень четвертой степени 9 1,7321 Корень четвертой степени 34 2,4147 Корень четвертой степени 10 1,7783 Корень четвертой степени из 35 2,4323 Корень четвертой степени из 11 1,8212 Корень четвертой степени из 36 2,4495 Корень четвертой степени 12 1,8612 Корень четвертой степени 37 2,4663 Корень четвертой степени 13 1,8988 Корень четвертой степени 38 2,4828 Корень четвертой степени 14 1 , 9343 Корень четвертой степени 39 2,499 Корень четвертой степени 15 1,968 Корень четвертой степени 40 2,5149 Корень четвертой степени 16 2 Корень четвертой степени 1641 2,5304 Корень четвертой степени 17 2,0305 Корень четвертой степени 42 2,5457 Корень четвертой степени 18 2,0598 Корень четвертой степени 43 2,5607 Корень четвертой степени 19 2,0878 Корень четвертой степени 44 2,5755 Корень четвертой степени 20 2,1147 Корень четвертой степени 45 2,59 Четвертый корень из 21 2,1407 Четвертый корень из 46 2,6043 Четвертый корень из 22 2,1657 Четвертый корень из 47 2,6183 Четвертый корень из 23 2,1899 Корень четвертой степени 48 2,6321 Корень четвертой степени 24 2,2134 Корень четвертой степени 49 2,6458 25984 Корень четвертой степени 2,2361 90 984 Корень четвертой степени из 502,6591 Если вы хотите рассчитать другое число, воспользуйтесь нашим онлайн-калькулятором корня четвертой степени вверху.
Подробнее Корневой калькулятор:
ссылка: n -й корень из Википедии
Корни и радикалы
Квадратные и кубические корни
Напомним, что квадратный корень — это число, которое при умножении само на себя дает исходное число. числа — это число, которое при умножении само на себя дает исходное число. Например, 5 — это квадратный корень из 25, потому что 52 = 25. Поскольку (−5) 2 = 25, мы можем сказать, что −5 также является квадратным корнем из 25. Каждое положительное действительное число имеет два квадратных корня: положительный и отрицательный.По этой причине мы используем знак корня для обозначения главного (неотрицательного) квадратного корня Положительного квадратного корня из положительного действительного числа, обозначаемого символом. и отрицательный знак перед корнем — для обозначения отрицательного квадратного корня.
25 = 5 Положительный квадратный корень из 25-25 = −5 Отрицательный квадратный корень из 25
Ноль — единственное действительное число с одним квадратным корнем.
0 = 0, потому что 02 = 0
Пример 1
Оценить.
- 121
- −81
Решение:
- 121 = 112 = 11
- −81 = −92 = −9
Если подкоренное выражение Выражение A в знаке корня, An., Число внутри знака радикала, может быть разложено на квадрат другого числа, то квадратный корень из числа очевиден. В этом случае мы имеем следующее свойство:
a2 = a, если a≥0
Или, в более общем смысле,
a2 = | a | если a∈ℝ
Абсолютное значение важно, потому что a может быть отрицательным числом, а знак корня обозначает главный квадратный корень.Например,
(-8) 2 = | -8 | = 8
Используйте абсолютное значение для получения положительного результата.
Пример 2
Упростить: (x − 2) 2.
Решение:
Здесь выражение переменной x − 2 может быть отрицательным, нулевым или положительным. Поскольку знак зависит от неизвестной величины x , мы должны обеспечить получение главного квадратного корня, используя абсолютное значение.
(x − 2) 2 = | x − 2 |
Ответ: | x − 2 |
Важность использования абсолютного значения в предыдущем примере становится очевидной, когда мы оцениваем, используя значения, которые делают подкоренное выражение отрицательным. Например, если x = 1,
(x − 2) 2 = | x − 2 | = | 1−2 | = | −1 | = 1
Затем рассмотрим квадратный корень отрицательного числа. Чтобы определить квадратный корень из −25, вы должны найти число, возведение которого в квадрат дает −25:
.−25 =? или (?) 2 = −25
Однако возведение любого действительного числа в квадрат всегда дает положительное число.Квадратный корень отрицательного числа в настоящее время не определен. А пока мы заявим, что -25 не является действительным числом. Следовательно, функция извлечения квадратного корня Функция определяется как f (x) = x. заданный как f (x) = x, не определяется как действительное число, если значения x отрицательны. Наименьшее значение в домене равно нулю. Например, f (0) = 0 = 0 и f (4) = 4 = 2. Напомним график функции извлечения квадратного корня.
Домен и диапазон состоят из действительных чисел, больших или равных нулю: [0, ∞).Чтобы определить область определения функции, содержащей квадратный корень, мы смотрим на подкоренное выражение и находим значения, которые дают неотрицательные результаты.
Пример 3
Определите область определения функции f (x) = 2x + 3.
Решение:
Здесь подкоренное выражение 2x + 3. Это выражение должно быть нулевым или положительным. Другими словами,
2x + 3≥0
Решите относительно x .
2x + 3≥02x≥ − 3x≥ − 32
Ответ: Домен: [−32, ∞)
Кубический корень Число, которое при трехкратном использовании в качестве множителя с самим собой дает исходное число, обозначаемое символом 3. числа — это число, которое при трехкратном умножении на себя дает исходное число. Кроме того, мы обозначаем кубический корень с помощью символа 3, где 3 называется индексом Положительное целое число n в обозначении n, которое используется для обозначения корня n -й степени.. Например,
643 = 4, потому что 43 = 64
Произведение трех равных множителей будет положительным, если множитель положительный, и отрицательным, если множитель отрицательный. По этой причине у любого действительного числа будет только один действительный кубический корень. Следовательно, технические детали, связанные с основным корнем, не применяются. Например,
−643 = −4, потому что (−4) 3 = −64
В общем случае для любого действительного числа a мы имеем следующее свойство:
a33 = a, если a∈ℝ
При упрощении кубических корней ищите множители, которые являются идеальными кубами.
Пример 4
Оценить.
- 83
- 03
- 1273
- −13
- −1253
Решение:
- 83 = 233 = 2
- 03 = 033 = 0
- 1273 = (13) 33 = 13
- −13 = (- 1) 33 = −1
- −1253 = (- 5) 33 = −5
Возможно, подкоренное выражение не является точным квадратом или кубом.3≈2
Поскольку кубические корни могут быть отрицательными, нулевыми или положительными, мы не используем никаких абсолютных значений.
Пример 5
Упростить: (y − 7) 33.
Решение:
Кубический корень из куба количества и есть это количество.
(у-7) 33 = у-7
Ответ: y − 7
Попробуй! Оцените: -10003.
Ответ: −10
Затем рассмотрим функцию кубического корня Функция, определенная как f (x) = x3 .:
f (x) = x3 Функция кубического корня.
Поскольку кубический корень может быть как отрицательным, так и положительным, мы заключаем, что домен состоит из всех действительных чисел. Нарисуйте график, нанося точки. Выберите несколько положительных и отрицательных значений для x , а также ноль, а затем вычислите соответствующие значения y .
xf (x) = x3 Упорядоченные пары − 8−2f (−8) = — 83 = −2 (−8, −2) −1−1f (−1) = — 13 = −1 (−1, −1) 00f (0) = 03 = 0 (0,0) 11f (1) = 13 = 1 (1,1) 82f (8) = 83 = 2 (8,2)
Постройте точки и нарисуйте график функции кубического корня.
График проходит проверку вертикальной линии и действительно является функцией. Кроме того, диапазон состоит из всех действительных чисел.
Пример 6
Дано g (x) = x + 13 + 2, найти g (−9), g (−2), g (−1) и g (0).Нарисуйте график g.
Решение:
Заменить x заданными значениями.
xg (x) g (x) = x + 13 + 2 Упорядоченные пары − 90g (−9) = — 9 + 13 + 2 = −83 + 2 = −2 + 2 = 0 (−9,0) −21g ( −2) = — 2 + 13 + 2 = −13 + 2 = −1 + 2 = 1 (−2,1) −12g (−1) = — 1 + 13 + 2 = 03 + 2 = 0 + 2 = 2 (-1,2) 03g (0) = 0 + 13 + 2 = 13 + 2 = 1 + 2 = 3 (0,3)
Мы также можем зарисовать график, используя следующие переводы:
y = x3 Базовая функция корня куба y = x + 13 Горизонтальный сдвиг влево 1 единица = x + 13 + 2 Вертикальный сдвиг вверх на 2 единицы
Ответ:
энные корни
Для любого целого числа n≥2 мы определяем корень n -го числа, которое при увеличении до n -й степени (n≥2) дает исходное число.положительного действительного числа как числа, которое при возведении в степень n в -й степени дает исходное число. Для любого неотрицательного действительного числа a мы имеем следующее свойство:
ann = a, если a≥0
Здесь n называется индексом, а an называется подкоренным выражением. Кроме того, мы можем ссылаться на все выражение An как на радикал. Используется при обращении к выражению формы An .. Когда индекс является целым числом, большим или равным 4, мы говорим «корень четвертой степени», «корень пятой степени» и скоро.Корень n -й степени любого числа очевиден, если мы можем записать подкоренное выражение с показателем, равным индексу.
Пример 7
Упростить.
- 814
- 325
- 17
- 1164
Решение:
- 814 = 344 = 3
- 325 = 255 = 2
- 17 = 177 = 1
- 1164 = (12) 44 = 12
Примечание : Если индекс равен n = 2, то радикал указывает на квадратный корень, и принято писать радикал без индекса; а2 = а.
Мы уже позаботились о том, чтобы определить главный квадратный корень действительного числа. На этом этапе мы расширяем эту идею до n корней -й степени, когда n четное. Например, 3 — это корень четвертой степени из 81, потому что 34 = 81. А поскольку (−3) 4 = 81, мы можем сказать, что −3 также является корнем четвертой степени из 81. Следовательно, мы используем знак корня n для обозначения главного (неотрицательного) корня n -го числа Положительный корень n -й степени, когда n четное. когда n четное.В этом случае для любого действительного числа a мы используем следующее свойство:
ann = | a | Когда n равно
Например,
814 = 344 = | 3 | = 3 814 = (- 3) 44 = | −3 | = 3
Отрицательный корень n -й, когда n четный, будет обозначаться отрицательным знаком перед корнем — n.
−814 = −344 = −3
Мы видели, что квадратный корень из отрицательного числа не является действительным, потому что любое действительное число, возведенное в квадрат, даст положительное число.Фактически, аналогичная проблема возникает для любого четного индекса:
−814 =? или (?) 4 = −81
Мы видим, что корень четвертой степени из −81 не является действительным числом, потому что четвертая степень любого действительного числа всегда положительна.
−4−814−646} Эти радикалы не являются действительными числами.
Предлагаем вам попробовать все это на калькуляторе. Что там написано?
Пример 8
Упростить.
- (-10) 44
- −1044
- (2г + 1) 66
Решение:
Поскольку индексы четные, используйте абсолютные значения, чтобы гарантировать неотрицательные результаты.
- (-10) 44 = | -10 | = 10
- −1044 = −10,0004 не является действительным числом.
- (2y + 1) 66 = | 2y + 1 |
Когда индекс n нечетный, те же проблемы не возникают.Произведение нечетного числа положительных факторов положительно, а произведение нечетного количества отрицательных факторов отрицательно. Следовательно, когда индекс n нечетный, существует только один действительный корень n -й степени для любого действительного числа a . И вот недвижимость у нас:
ann = a Если n нечетное
Пример 9
Упростить.
- (−10) 55
- −325
- (2 года + 1) 77
Решение:
Поскольку индексы нечетные, абсолютное значение не используется.
- (-10) 55 = -10
- −325 = (- 2) 55 = −2
- (2г + 1) 77 = 2г + 1
Таким образом, для любого действительного числа у нас есть
ann = | a | Когда n четноann = aКогда n нечетно
Когда n является нечетным , корень n -й степени равен положительным или отрицательным в зависимости от знака подкоренного выражения.
273 = 333 = 3−273 = (- 3) 33 = −3
Когда n равно , корень n -й степени равен положительным или ненастоящим в зависимости от знака подкоренного выражения.
164 = 244 = 2164 = (- 2) 44 = | −2 | = 2−164 Не действительное число
Попробуй! Упростить: −8−325.
Ответ: 16
Упрощающие радикалы
Не всегда подкоренное выражение является полной степенью данного индекса. Если это не так, мы используем правило произведения для радикалов, заданных действительными числами An и Bn, A⋅Bn = An⋅Bn. и правило частного для радикалов с заданными действительными числами An и Bn, ABn = AnBn, где B ≠ 0.чтобы упростить их. Учитывая действительные числа An и Bn,
Правило продукта для радикалов:
A⋅Bn = An⋅Bn
Правило частного для радикалов:
ABn = AnBn
Радикал упрощен: радикал, в котором подкоренное выражение не состоит из каких-либо множителей, которые могут быть записаны как полные степени индекса.если он не содержит каких-либо факторов, которые могут быть записаны как абсолютные степени индекса.
Пример 10
Упростить: 150.
Решение:
Здесь 150 можно записать как 2⋅3⋅52.
150 = 2⋅3⋅52 Примените правило произведения для радикалов. = 2⋅3⋅52 Упростите. = 6 ⋅ 5 = 56
Мы можем проверить наш ответ на калькуляторе:
150≈12,25 и 56≈12,25
Также стоит отметить, что
12.252≈150
Ответ: 56
Примечание : 56 — точный ответ, а 12,25 — приблизительный ответ. Мы даем точные ответы, если не указано иное.
Пример 11
Упростить: 1603.
Решение:
Используйте разложение на простые множители 160, чтобы найти наибольший коэффициент идеального куба:
160 = 25⋅5 = 23⋅22⋅5
Замените подкоренное выражение этой факторизацией, а затем примените правило произведения для радикалов.
1603 = 23⋅22⋅53 Примените правило произведения для радикалов. = 233⋅22⋅53 Упростите. = 2⋅203
Мы можем проверить наш ответ на калькуляторе.
1603≈5,43 и 2203≈5,43
Ответ: 2203
Пример 12
Упростить: −3205.
Решение:
Здесь отметим, что индекс нечетный, а подкоренное выражение отрицательное; следовательно, результат будет отрицательным.Мы можем разложить подкоренное выражение на множители следующим образом:
−320 = −1⋅32⋅10 = (- 1) 5⋅ (2) 5⋅10
Затем упростите:
−3205 = (- 1) 5⋅ (2) 5⋅105 Примените правило произведения для радикалов. = (- 1) 55⋅ (2) 55⋅105Simplify. = — 1⋅2⋅105 = −2⋅105
Ответ: −2105
Пример 13
Упростить: -8643.
Решение:
В этом случае рассмотрим эквивалентную дробь с −8 = (- 2) 3 в числителе и 64 = 43 в знаменателе, а затем упростим.
−8643 = −864 3 Примените правило частного для радикалов. = (- 2) 33433Simplify. = — 24 = −12
Ответ: −12
Попробуй! Упростить: 80814
Ответ: 2543
Основные выводы
- Чтобы упростить извлечение квадратного корня, найдите наибольший коэффициент полного квадрата корневого выражения, а затем примените правило произведения или частного для радикалов.
- Чтобы упростить кубический корень, найдите наибольший коэффициент идеального куба подкоренного выражения, а затем примените правило произведения или частного для радикалов.
- При работе с корнями n , n определяет применимое определение. Мы используем ann = a, когда n нечетно и ann = | a | когда n четное.
- Чтобы упростить n корней -й степени, найдите множители, мощность которых равна индексу n , а затем примените правило произведения или частного для радикалов.Обычно процесс упрощается, если вы работаете с разложением на простые множители подкоренного выражения.
Тематические упражнения
49
164
183
8273
Дано f (x) = x − 1, найти f (1), f (2) и f (5)
Дано f (x) = x + 5, найти f (−5), f (−1) и f (20)
Дано f (x) = x + 3, найти f (0), f (1) и f (16)
Дано f (x) = x − 5, найти f (0), f (1) и f (25)
Дано g (x) = x3, найти g (−1), g (0) и g (1)
Дано g (x) = x3−2, найти g (−1), g (0) и g (8)
Дано g (x) = x + 73, найти g (−15), g (−7) и g (20)
Дано g (x) = x − 13 + 2, найти g (0), g (2) и g (9)
Часть A: квадратные и кубические корни
Упростить.
Определите область применения данной функции.
Оценить по определению функции.
Нарисуйте график данной функции и укажите ее область определения и диапазон.
1325
12435
32516
6169
5271253
732755
−58273
−8625164
Часть B:
n -е корниУпростить.
15049
2009 г.
675121
19281
541253
403433
2242435
5325
−1325
−1646
9649
19225
2881253
62583
Каждая сторона квадрата имеет длину, равную квадратному корню из площади квадрата.Если площадь квадрата составляет 72 квадратных единицы, найдите длину каждой из его сторон.
Каждое ребро куба имеет длину, равную кубическому корню из объема куба. Если объем куба составляет 375 кубических единиц, найдите длину каждого из его ребер.
Ток I , измеренный в амперах, определяется по формуле I = PR, где P — потребляемая мощность, измеренная в ваттах, а R — сопротивление, измеренное в омах.Если у 100-ваттной лампочки сопротивление 160 Ом, найдите необходимый ток. (Округлить до сотых долей ампера.)
Время в секундах, в течение которого объект находится в свободном падении, определяется формулой t = s4, где s представляет собой расстояние в футах, на которое объект упал. Сколько времени потребуется объекту, чтобы упасть на землю с вершины 8-футовой стремянки? (Округлите до ближайшей десятой секунды.)
Часть C: Упрощение радикалов
Упростить.
Упростить.Дайте точный и приблизительный ответ с округлением до сотых.
Перепишем следующее как радикальное выражение с коэффициентом 1.
Объясните, почему существует два действительных квадратных корня для любого положительного действительного числа и один действительный кубический корень для любого действительного числа.
Что такое квадратный корень из 1 и кубический корень из 1? Объяснить, почему.
Объясните, почему −1 не является действительным числом и почему −13 является действительным числом.
Изучите и обсудите методы, используемые для вычисления квадратных корней, прежде чем электронные калькуляторы начнут широко использоваться.
Часть D: Обсуждение
Ответы
[−15, ∞)
г (−1) = — 1; г (0) = 0; г (1) = 1
г (−15) = — 2; г (-7) = 0; г (20) = 3
Домен: [-9, ∞); диапазон: [0, ∞)
Домен: [1, ∞); диапазон: [2, ∞)
Домен: ℝ; диапазон: ℝ
Домен: ℝ; диапазон: ℝ
Домен: ℝ; диапазон: ℝ
Домен: ℝ; диапазон: ℝ
567
15311
3235
2753
Видео урок: n-е корни: целые числа
Стенограмма видео
Из этого видео о корнях-й степени мы узнаем, как извлечь корень-й степени числа, где 𝑛 — положительное целое число.Например, мы узнаем, как найти корень шестой степени из 64 или корень четвертой степени из 81. Нахождение корня-й степени числа — это операция, обратная нахождению-й степени. Итак, первое, что мы сделаем, — это резюмируем некоторые общие силы и примеры.
Давайте начнем с возведения числа в степень единицы. Например, два в степени одного просто означает один два. Два в квадрате означает два из числа два, умноженных вместе. И это дважды два, то есть четыре. Два в третьей степени означает три двойки, умноженные вместе.Будьте осторожны, так как очень распространенной ошибкой является утверждение, что двойка в третьей степени равна шести, но это было бы сложение трех двоек вместе. Вместо этого мы можем думать об этом в терминах умножения первых двух двоек вместе, что даст нам четыре, а умножение на оставшиеся два даст нам восемь. Два в четвертой степени записываются как четыре двойки, умноженные вместе. А мы знаем, что два в кубе равны восьми. Итак, умножив восемь на оставшиеся два, мы получим 16.
Как это соотносится с извлечением корней из чисел? Давайте подумаем об обратной операции возведения в квадрат, которая будет извлекать квадратный корень.Здесь мы получили квадратный корень из четырех. Мы можем помнить, что когда мы пишем квадратный корень, нам не нужно записывать эти два меньших, если мы имеем в виду просто квадратный корень. Квадратный корень из четырех означает, какое число мы умножаем на два, чтобы получить значение четыре. Ответ, конечно, два, так как два умноженные на два дают четыре.
Далее, кубический корень из восьми означает, какое число мы умножаем три раза, чтобы получить значение восемь. И это будет два, поскольку дважды два умножить на два равно восьми.Наконец, корень четвертой степени из 16 также будет равен двум, поскольку дважды два умножить на два умножить на два дает 16.
Мы можем применить те же принципы, когда мы смотрим на степени или экспоненты трех. Три в квадрате — это трижды три, что равно девяти. Три в третьей степени — это трижды трижды три, то есть 27. И три в четвертой степени дадут нам 81. Тогда мы можем найти различные корни из девяти, 27 и 81 как три.
В общем, мы можем думать, что-й корень числа 𝑥 — это значение, которое умножается 𝑛 раз, чтобы получить.Мы можем видеть пример того, что корень четвертой степени из 81 равен трем, потому что три в четвертой степени равны 81.
Прежде чем мы перейдем к некоторым вопросам, вот полезный совет. Очень хорошо знать первые несколько степеней числа два, три, четыре и даже пять. Таким образом, мы сможем еще быстрее вспомнить различные корни, особенно в экзаменационных вопросах. Итак, давайте посмотрим на первый вопрос.
Вычислите квадратный корень из четырех.
Мы можем начать с напоминания о том, что когда у нас есть символ корня, а не меньшая цифра, мы действительно извлекаем квадратный корень из значения.Когда мы находим квадратный корень из четырех, мы действительно спрашиваем, какое число, умноженное само на себя, даст нам четыре? Мы могли думать об этом с любой буквой. Здесь я использовал 𝑦. Итак, 𝑦 умножить на равно четырем. Итак, 𝑦 должно быть равно двум, так как два умноженные на два дадут нам четыре. Итак, мы можем дать ответ, что квадратный корень из четырех равен двум.
Давайте рассмотрим следующий вопрос.
Вычислите корень четвертой степени из 81.
Прежде чем мы начнем отвечать на этот вопрос, важно заметить различие между этим корневым знаком с малой четверкой и большой четверкой.В данном вопросе мы имеем дело с корнем четвертой степени из 81. Это второе значение, однако, будет означать четыре, умноженные на квадратный корень из 81. Мы должны помнить, что если мы пишем их от руки, чтобы убедиться, что когда мы пишем четвертый корень или что-то в этом роде, чтобы уменьшить значение в корне. Четыре, умноженные на квадратный корень из 81, — это не то, что мы хотим здесь вычислить.
Чтобы вычислить корень четвертой степени из 81, мы действительно спрашиваем, какое значение 𝑦, например, в четвертой степени даст нам значение 81? Когда мы находим число в четвертой степени, это означает, что мы умножаем четыре из них.Часто мы можем решить эти проблемы с помощью серии испытаний и улучшений. Если мы возьмем значение 𝑦 равным единице, мы знаем, что один раз один раз один раз один даст нам только один, а не 81. Итак, давайте попробуем значение два. Дважды два даст нам четыре. Четыре раза два даст нам восемь. Восемь умножить на два даст нам 16. Но 16 — это не то значение, которое мы ищем.
Затем мы можем попробовать значение три. Чтобы тренироваться трижды, трижды, трижды, трижды, мы можем сделать это несколькими разными методами.Мы могли бы вычислить первые три раза по три, то есть девять, а затем мы могли бы умножить это на три, а затем умножить еще на три. Или мы могли заметить, что там еще три раза по три, что дает нам девять. И девять умноженных на девять дает нам значение 81. Это означает, что мы нашли то значение, которое искали. Поскольку теперь мы знаем, что три в четвертой степени равно 81, это означает, что корень четвертой степени из 81 равен трем. Итак, наш ответ — три.
Давайте посмотрим на другой вопрос.
Выполните следующее: Кубический корень из 27 равен квадратному корню из пробела.
Давайте начнем этот вопрос с того, что посмотрим, можем ли мы упростить левую часть, кубический корень из 27. Мы можем вспомнить, что если мы находим что-то вроде кубического корня из 27, мы действительно спрашиваем, какое значение, 𝑦 например, в третью степень нам дали бы 27? Когда число переводится в третью степень, это означает, что оно написано трижды и умножено. Мы можем ответить на подобные вопросы, используя метод проб и улучшений.
Здесь мы написали один раз, один раз по одному, но на самом деле нам никогда не нужно выбирать что-то одно как возможность, потому что мы знаем, что ответ всегда будет один. Итак, как насчет два раза два раза два? Что ж, мы могли бы вычислить это как восемь, но помните, что любое четное число, умноженное на четное, всегда даст нам четное число. И мы ищем здесь нечетное значение 27. Итак, если бы мы подумали об этом, нам даже не нужно было бы вычислять значение двойки в третьей степени.
Так что насчет трижды трижды три? Итак, три умноженные на три дают нам девять, а девять, умноженные на оставшиеся три, дают нам значение 27. И это значение, которое мы искали. Теперь мы знаем, что три, умноженные на три, умноженные на три, дают нам 27, мы знаем, что три в третьей степени равно 27. Итак, обратная операция, то есть кубический корень из 27, дает нам три.
Теперь, когда мы обнаружили, что значение равно трем, означает ли это, что наш пропущенный ответ должен быть трем? Не совсем так.Значение, которое мы ищем, — это квадратный корень из того, что дает нам три. Чтобы найти ответ на квадратный корень из того, что дает нам три, мы должны выполнить операцию, обратную нахождению квадратного корня. И это квадрат. Итак, наше значение, которое нам не хватает, должно быть равно трем в квадрате. Три в квадрате — это три, умноженные на три. А это девять. Итак, наш ответ — значение девять. Мы можем перепроверить каждую сторону уравнения. Кубический корень из 27, который мы нашли, был значением три, а квадратный корень из девяти также является значением три.
В следующем вопросе мы увидим более сложный вопрос, связанный с вычислением с разными корнями.
Учитывая, что 𝑥 равно корню пятой степени из 32, вычтите корень четвертой степени из 625 плюс квадратный корень из 64, найдите 𝑥.
В этом вопросе, чтобы найти значение, нам нужно будет вычислить значение всех этих различных составляющих в правой части уравнения. Давайте по очереди рассмотрим каждый из этих терминов и посмотрим, сможем ли мы вычислить их значение.
Чтобы найти корень пятой степени из 32, мы на самом деле пытаемся выяснить, какое значение 𝑎, записанное пять раз и умноженное, дало бы нам значение 32. Мы можем сказать, что это значение 𝑎 не будет равняется единице, потому что умножение единицы на единицу, сколько бы раз ни было, все равно даст нам значение единицы. Если мы попробуем значение два, то два, умноженные на два, дают нам четыре, а еще два, умноженные на два, дают нам четыре, а четыре, умноженные на четыре, дают 16, а 16, умноженное на два, действительно дает нам 32.Это означает, что два в степени пяти равняются 32. Следовательно, корень пятой степени из 32 равен двум.
Затем давайте посмотрим на решение корня четвертой степени из 625. На этот раз мы ищем значение, назовем его 𝑏, записанное четыре раза и умноженное, что даст нам 625. Мы знаем, что 𝑏 не будет одним. И мы могли бы даже понять, что 𝑏 тоже не может быть двух, потому что 625 — нечетное число. Два, умноженные на два, всегда дают нам четное число. Итак, как насчет значения три? Ну, трижды три — девять.И у нас есть еще три раза по три, то есть девять. И девять умноженных на девять дает нам значение 81. Итак, мы знаем, что наше значение не равно трем.
Далее мы могли бы выбрать значение четыре, но мы знаем, что снова четыре — это четное число, а значение 625, которое мы ищем, — нечетное число. Чтобы попытаться получить значение пять, мы можем увидеть, что пять умноженных на пять дают нам 25. Умножение на другие пять дает нам 125. А умножение на оставшиеся пять дает значение 625.И это та ценность, которую мы ищем. Итак, теперь мы знаем, что корень четвертой степени из 625 равен пяти.
Наконец, давайте посмотрим на квадратный корень из 64. Мы должны помнить, что если мы пытаемся найти квадратный корень из 64, мы спрашиваем, какое значение, умноженное само на себя, даст нам 64? И это будет восемь, поскольку восемь, умноженное на восемь, равно 64. Теперь, когда мы нашли каждый член в правой части в упрощенной форме, мы можем найти значение 𝑥.
Итак, мы вычисляем корень пятой степени из 32, который равен двум, вычитаем корень четвертой степени из 625, который равен пяти, плюс квадратный корень из 64, который равен восьми.Здесь нам нужно применить порядок операций, который говорит нам, что когда у нас есть сложение и вычитание, мы выполняем их в порядке слева направо. Два вычитания пяти дают нам три. И тогда, добавив восемь, мы получим пять. Следовательно, ответ на вопрос: 𝑥 равно пяти.
Давайте посмотрим на последний вопрос.
Учитывая, что 𝑥 равно корню шестой из 64 плюс квадратный корень из 81 плюс третий корень из отрицательных 27, вычтите корень четвертой степени из 16, найдите 𝑥.
Чтобы найти значение, нам нужно упростить каждый член в правой части. Здесь есть одно, с которым мы должны быть знакомы, квадратный корень из 81. Когда мы находим квадратный корень из числа, мы действительно спрашиваем, какое число, умноженное на само себя, даст нам это значение? Итак, мы знали, что девять в квадрате равно 81. Следовательно, квадратный корень из 81 равен девяти.
Давайте посмотрим, сможем ли мы вычислить корень шестой степени из 64.Чтобы решить эту проблему, мы можем думать об этом наоборот. То есть мы говорим, какое значение 𝑎 в шестой степени даст нам 64. 𝑎 в шестой степени эквивалентно 𝑎, умноженному на шесть раз. Давайте попробуем небольшое значение. Например, мы можем принять значение 𝑎 равным двум. Мы знаем, что два, умноженные на два, дают четыре. И мы понимаем, что у нас есть четыре, умноженные на четыре, умноженные на четыре. Четыре четверки — 16. А 16 умноженное на четыре даст нам 64. И это то значение, которое мы искали.Теперь мы знаем, что значение в степени шести равно двум. Два в степени шести равны 64. Следовательно, мы можем сказать, что корень шестой степени из 64 равен двум.
Теперь давайте посмотрим на третий член в правой части, кубический корень из отрицательного числа 27. Здесь легко запутаться. Нам, возможно, сказали, что мы не можем найти квадратный корень из отрицательного числа, но это немного отличается от нахождения кубического корня. На этот раз мы спрашиваем, какое значение 𝑏 в кубе или в третьей степени даст нам отрицательное значение 27? Что ж, мы знаем, что 𝑏 должно быть равно отрицательному числу, поскольку если мы умножим отрицательное значение на отрицательное, мы получим положительное значение, а затем, если мы умножим положительное значение на отрицательное значение, мы получим отрицательное значение.
Итак, при желании мы могли бы попробовать значение 𝑏, равное отрицательным двум. Итак, мы вычисляем отрицательные два, умноженные на отрицательные два, умноженные на отрицательные два. Умножение первых двух лотов отрицательных двух даст нам четыре. А четыре, умноженные на отрицательные два, дадут нам отрицательные восемь. Но мы ищем отрицательное значение 27. Таким образом, это значение 𝑏 как отрицательное два не будет работать.
Далее мы можем попробовать отрицательное значение три. Мы знаем, что умножение отрицательных трех на отрицательные три даст нам девять, а затем умножение на следующие отрицательные три даст нам отрицательное значение 27.И это та ценность, которую мы искали. Это означает, что кубическое значение 𝑏 должно быть отрицательным трем. Итак, кубический корень из отрицательных 27 равен отрицательным трем.
Нам осталось исследовать последний член, корень четвертой степени из 16. На этот раз мы спрашиваем, какое значение 𝑐 в четвертой степени даст нам 16? Начнем со значения два. Дважды два — четыре, четыре раза два — восемь, восемь умноженное на два — 16. Итак, похоже, что мы нашли значение 𝑐. Поскольку два в четвертой степени равны 16, то корень четвертой степени из 16 равен двум.
Итак, давайте соберем все эти упрощенные термины вместе, чтобы найти значение 𝑥. Итак, у нас 𝑥 равно корню шестой степени из 64, который, как мы обнаружили, равен двум, плюс квадратный корень из 81, который равен девяти, плюс кубический корень из отрицательного числа 27, который равен трем, вычесть корень четвертой степени из 16 , то есть два. Когда мы добавляем отрицательное значение три, это эквивалентно вычитанию трех. Мы должны помнить о порядке операций при сложении и вычитании. Итак, работаем слева направо.Два плюс девять — 11, вычесть три — восемь, вычесть два — шесть. Итак, наш ответ таков, что 𝑥 равно шести.
Теперь мы можем подвести итог тому, что узнали из этого видео. Корень-й степени, 𝑟, числа 𝑥 — это значение, которое умножается 𝑛 раз, чтобы получить. Например, четвертый корень из 81 равен трем, поскольку три умножается четыре раза, чтобы получить 81. Мы должны быть осторожны, чтобы различать, что три умножается на четыре, что будет 12, и три, умноженные четыре раза, что будет 81.
У нас может быть действительное числовое значение-го корня отрицательного числа, если 𝑛-значение нечетное.
Онлайн тригонометрические графики: Построить графики тригонометрических функций онлайн
//Построение графика функции онлайн | umath.ru
- Обязательно писать все знаки умножения
- Десятичные дроби нужно разделять точкой
- Список функций и констант смотрите ниже
Как пользоваться программой:
- Можно строить графики сразу нескольких функций. Для этого просто разделяйте функции точкой с запятой (;).
- Масштаб изменяется с помощью кнопок «+» и «−». Кнопка «100%» меняет масштаб на стандартный.
- Положение экрана можно менять, перетаскивая его мышью, а можно стрелками на панели слева.
- Кнопка «·» в центре джойстика переносит начало координат в центр экрана.
- Кнопка «↺» изменяет масштаб на стандартный и переносит начало координат в центр.
- В форме под графиком можно выбрать точку, которую нужно расположить в центре экрана.
Режимы
Обычный. В этом режиме можно строить графики функций, заданных уравнением
Параметрический. Этот режим предназначен для построения графиков кривых, заданных параметрически, то есть в виде
Полярные координаты.
Режим позволяет построить график кривой, заданной в полярной системе
координат, то
есть уравнением где — радиальная координата, а — полярная координата.Список констант
Константа Описание piЧисло =3,14159...eЧисло Эйлера =2,71828...Список функций
Функция Описание + − * /Сложение, вычитание, умножение, деление ( )Группирующие скобки abs()или| |Модуль числа. Выражение abs(x)эквивалентно|x|. Если функция содержит модуль под модулем, то пользуйтесьabs(). Например, если вы хотите построить график функции|1-x+|x+5||, то нужно вводитьabs(1-x+abs(x+5)). 3 дают xв третьей степениsqrt()Квадратный корень sin()Синус cos()Косинус tg()Тангенс ctg()Котангенс arcsin()Арксинус arccos()Арккосинус arctg()Арктангенс arcctg()Арккотангенс ln()Натуральный логарифм числа lg()Десятичный логарифм числа log(a, b)Логарифм числа bпо основаниюaexp()Степень числа esh()Гиперболический синус ch()Гиперболический косинус th()Гиперболический тангенс cth()Гиперболический котангенс График функции
Графиком функции называется множество точек плоскости таких, что абсциссы и ординаты этих точек удовлетворяют уравнению .
Программа создана для школьников и студентов и позволяет строить графики функций онлайн. Во многих браузерах (например, Google Chrome) картинку с графиком функции можно сохранить на компьютер.
Пожалуйста, все предложения и замечания по работе программы пишите в комментариях.
Кроме того мы планируем создать библиотеку функций с интересными и забавными графиками. Если вы открыли функцию с таким графиком, то обязательно напишите об этом в комментариях! Ваше открытие будет опубликовано и станет носить ваше имя ;).
Графики тригонометрических функций
Графики синуса и косинуса
График функции изображен на рисунке 1.
Рис. 1
График функции изображен на рисунке 2.
Рис. 2
Кривая, описывающая функцию синуса, называется синусоидой, а косинуса – косинусоидой.
График функции можно получить из графика функции сдвигом последнего влево на . Аналогично, график функции можно получить из графика функции сдвигом последнего вправо на .
Графики тангенса и котангенса
График функции изображен на рисунке 3. Кривая, задающая функцию тангенса, называется тангенсоидой.
Рис. 3
График функции изображен на рисунке 4.
Рис. 4
Примеры решения задач
ПРИМЕР 1
ПРИМЕР 2Задание Построить график функции Решение Искомый график получается из графика функции в результате параллельного переноса вдоль оси абсцисс вправо на (рис. 5). Рис. 5
ПРИМЕР 3Задание Построить график функции Решение Искомый график получается из графика функции в результате параллельного переноса вдоль оси ординат вверх на 1 (рис. 6) . Рис. 6
ПРИМЕР 4Задание Построить график функции Решение Искомый график получается из графика функции растяжением последнего вдоль оси ординат в три раза (увеличением расстояния от каждой точки графика до оси абсцисс в три раза) (рис. 7).
Рис. 7
Читайте также:Задание Построить график функции Решение Заданный график построим с помощью элементарных преобразований графика функции . Осуществив параллельный перенос графика функции вдоль оси абсцисс влево на , получим (рис. 8) Рис. 8
Затем, отразив график функции симметрично относительно оси абсцисс, получим искомый график (рис. 9).
Рис. 9
Простейшие тригонометрические уравнения
Тригонометрические функции числового аргумента
Свойства тригонометрических функций
Упрощение тригонометрических выражений
Косинус суммы
Графики тригонометрических функций — онлайн справочник для студентов
Графики синуса и косинуса
График функции \(\ y=\sin x \)изображен на рисунке 1.
Рис.
1График функции \(\ y=\cos x \) изображен на рисунке 2.
Рис. 2
Кривая, описывающая функцию синуса, называется синусоидой, а косинуса – косинусоидой.
График функции \(\ y=\cos x \) можно получить из графика функции \(\ y=\sin x \) сдвигом последнего влево на \(\ \frac{\pi}{2} \) . Аналогично, график функции \(\ y=\sin x \) можно получить из графика функции \(\ y=\cos x \) сдвигом последнего вправо на \(\ \frac{\pi}{2} \)
Графики тангенса и котангенса
График функции \(\ y=\operatorname{tg} x \) изображен на рисунке 3. Кривая, задающая функцию тангенса, называется тангенсоидой.
Рис. 3
График функции \(\ y=\operatorname{ctg} x \) изображен на рисунке 4.
Рис. 4
Примеры решения задач
ПРИМЕР 1
- Задание
Построить график функции \(\ y=\operatorname{tg}\left(x-\frac{\pi}{4}\right) \)
- Решение
Искомый график получается из графика функции \(\ y=\operatorname{tg} x \) в результате параллельного переноса вдоль оси абсцисс вправо на \(\ \frac{\pi}{4} \) (рис.
5).Рис. 5
ПРИМЕР 2
- Задание
Построить график функции \(\ y=\sin x+1 \)
- Решение
Искомый график получается из графика функции\(\ y=\sin x \) в результате параллельного переноса вдоль оси ординат вверх на 1 (рис. 6) .
Рис. 6
ПРИМЕР 3
- Задание
Построить график функции \(\ y=3 \operatorname{ctg} x \)
- Решение
Искомый график получается из графика функции \(\ y=\operatorname{ctg} x \) растяжением последнего вдоль оси ординат в три раза (увеличением расстояния от каждой точки графика \(\ y=\operatorname{ctg} x \) до оси абсцисс в три раза) (рис. 7).
Рис. 7
ПРИМЕР 4
- Задание
Построить график функции \(\ y=-\cos \left(x+\frac{\pi}{3}\right) \)
- Решение
Заданный график построим с помощью элементарных преобразований графика функции \(\ y=\cos x \) . Осуществив параллельный перенос графика функции \(\ y=\cos x \), вдоль оси абсцисс влево на \(\ \frac{\pi}{3} \) , получим \(\ y=\cos \left(x+\frac{\pi}{3}\right) \) (рис.
2».Если вам нужно построить график нескольких функций одновременно, то нажмите на синюю кнопку «Добавить еще». После этого откроется еще одно поле, в которое надо будет вписать вторую функцию. Ее график также будет построен автоматически.
Цвет линий графика вы можете настроить с помощью нажатия на квадратик, расположенный справа от поля ввода функции. Остальные настройки находятся прямо над областью графика. С их помощью вы можете установить цвет фона, наличие и цвет сетки, наличие и цвет осей, наличие рисок, а также наличие и цвет нумерации отрезков графика. Если необходимо, вы можете масштабировать график функции с помощью колесика мыши или специальных иконок в правом нижнем углу области рисунка.
После построения графика и внесения необходимых изменений в настройки, вы можете скачать график с помощью большой зеленой кнопки «Скачать» в самом низу. Вам будет предложено сохранить график функции в виде картинки формата PNG.
Зачем нужно строить график функции?
На этой странице вы можете построить интерактивный график функции онлайн.
Построение графика функции позволяет увидеть геометрический образ той или иной математической функции. Для того чтобы вам было удобнее строить такой график, мы создали специальное онлайн приложение. Оно абсолютно бесплатно, не требует регистрации и доступно для использования прямо в браузере без каких-либо дополнительных настроек и манипуляций. Строить графики для разнообразных функций чаще всего требуется школьникам средних и старших классов, изучающим алгебру и геометрию, а также студентам первых и вторых курсов в рамках прохождения курсов высшей математики. Как правило, данный процесс занимает много времени и требует кучу канцелярских принадлежностей, чтобы начертить оси графика на бумаге, проставить точки координат, объединить их ровной линией и т.д. С помощью данного онлайн сервиса вы сможете рассчитать и создать графическое изображение функции моментально.Как работает графический калькулятор для графиков функций?
Онлайн сервис работает очень просто.
». Это обусловлено отсутствием на клавиатуре компьютера возможности прописать степень в привычном формате. Далее приведена таблица с полным списком поддерживаемых функций.Приложением поддерживаются следующие функции:
Тригонометрические функции
Синус
Косинус
Тангенс
Секанс
Косеканс
Котангенс
Арксинус
Арккосинус
Арктангенс
Арксеканс
Арккосеканс
Арккотангенс
sin(x)
cos(x)
tan(x)
sec(x)
csc(x)
cot(x)
asin(x)
acos(x)
atan(x)
asec(x)
acsc(x)
acot(x)
Гиперболические функции
sinh(x)
cosh(x)
tanh(x)
sech(x)
csch(x)
coth(x)
asinh(x)
acosh(x)
atanh(x)
asech(x)
acsch(x)
acoth(x)
Прочее
Натуральный логарифм
Логарифм
Квадратный корень
Модуль
Округление в меньшую сторону
Округление в большую сторону
ln(x)
log(x)
sqrt(x)
abs(x)
floor(x)
ceil(x)
Минимум
Максимум
min(выражение1,выражение2,.
..)max(выражение1,выражение2,…)
Онлайн вычисление обратных тригонометрических функций
Калькулятор онлайн расчитывает обратные тригонометрические функции дугу (число) по заданному значению ее тригонометрической функции: арксинус (arcsin) возвращает угол по значению его синуса; арккосинус (arccos) возвращает угол по значению его косинуса; арктангенс (arctg) возвращает угол по значению его тангенса.
В разделе I. Для справки приведены графики обратных тригонометрических функций.
Помощь на развитие проекта premierdevelopment.ru
Send mail и мы будем знать, что движемся в правильном направлении.Спасибо, что не прошели мимо!
I. Для справки:
Арксинус числа a, обозначается arcsin(a) — значение угла x в интервале [−π/2, π/2], при котором sin(x) = a.
Обратная функция y = arcsin (x) определена при x ∈ [−1, 1], область значений арксинуса равна y ∈ [−π/2, π/2].
График функции арксинуса
Арккосинус числа a, обозначается arccos(a) — значение угла x в интервале [0, π], при котором cos(x) = a.
Обратная функция y = arccos (x) определена при x ∈ [−1, 1], область значений арккосинуса равна y ∈ [0, π].
График функции арккосинуса
Арктангенс числа a, обозначается arctan(a) — значение угла x в интервале [−π/2, π/2], при котором tan(x) = a.
Обратная функция y = arctan (x) определена при x ∈ R, область ее значений равна y ∈ [−π/2, π/2].
График функции арктангенса
II. Примечание:
- Если обратная тригонометрическая функция не определена в указанной точке, то ее значение не появится в результирующей таблице. Функции arcsin и arccos определены только на отрезке [-1,1].
- Округление результатов расчета выполняется до указанного количества знаков после запятой (по умолачанию — округление до сотых).
- Блок исходных данных выделен желтым цветом, блок промежуточных вычислений выделен голубым цветом, блок решения выделен зеленым цветом.
Графики тригонометрических функций — презентация онлайн
1. Графики тригонометрических функций
Функция у = sin x, ее
свойства
Преобразование
графиков
тригонометрических
функций путем
параллельного
переноса
Преобразование
графиков
тригонометрических
функций путем
Графиком функции у = sin x является синусоида
Свойства функции:
1. D(y) =R
2. Периодическая (Т=2p)
3. Нечетная (sin(-x)=-sin x)
4. Нули функции:
у=0, sin x=0 при х = pn, n Z
тригонометрические
функции
y=sin x
2
Свойства функции у = sin x
5. Промежутки знакопостоянства:
y = sin x
У>0 при х (0+2pn; p+2pn), n Z
У
тригонометрические
функции
34. Свойства функции у=sin x
6. Промежутки монотонности:
функция возрастает на промежутках
вида: [-p/2+2pn; p/2+2pn], n Z
тригонометрические
функции
y = sin x
45.
Свойства функции у=sin xПромежутки монотонности:
функция убывает на промежутках
вида: [p/2+2pn; 3p/2+2pn], n Z
тригонометрические
функции
y=sin x
56. Свойства функции у =sin x
7. Точки экстремума:
Хмах= p/2 +2pn, n Z
Хмin= -p/2 +2pn, n Z
тригонометрические
функции
y=sin x
67. Свойства функции у =sin x
8. Область значений:
Е(у) = [-1;1]
y = sin x
тригонометрические
функции
78. Преобразование графиков тригонометрических функций
График функции у = f (x+в) получается из графика функции
у = f(x) параллельным переносом на (-в) единиц вдоль оси
абсцисс
График функции у = f (x)+а получается из графика функции
у = f(x) параллельным переносом на (а) единиц вдоль оси
ординат
тригонометрические
функции
89. Преобразование графиков тригонометрических функций
Постройте график
Функции у =sin(x+p/4)
тригонометрические
функции
вспомнить
правила
910.
Преобразование графиков тригонометрических функцийПостройте график
функции: y=sin (x — p/6)
y =sin (x+ p/4)
тригонометрические
функции
1011. Преобразование графиков тригонометрических функций
Постройте график
функции:
y = sin x + p
y =sin (x — p/6)
тригонометрические
функции
1112. Преобразование графиков тригонометрических функций
y= sin x +p
Постройте график
функции: y=sin (x + p/2)
тригонометрические
функции
вспомнить
правила
12
Графиком функции у = cos x является косинусоида
sin(x+p/2)=cos x
Перечислите свойства
функции у = cos x
тригонометрические
функции
1314. Преобразование графиков тригонометрических функций путем сжатия и растяжения
График функции у =k f (x) получается из графика функции у
= f(x) путем его растяжения в k раз (при k>1) вдоль оси
ординат
График функции у = k f (x) получается из графика функции
у = f(x) путем его сжатия в k раз (при 0
ординат
тригонометрические
функции
1415.
Преобразование графиков тригонометрических функций путем сжатия и растяженияy=4sinx
y=2sinx
Y=0.5sinx
вспомнить
правила
тригонометрические
функции
1516. Преобразование графиков тригонометрических функций путем сжатия и растяжения
График функции у = f (kx) получается из графика функции у
= f(x) путем его сжатия в k раз (при k>1) вдоль оси абсцисс
График функции у = f (kx) получается из графика функции
у = f(x) путем его растяжения в k раз (при 0
абсцисс
тригонометрические
функции
1617. Преобразование графиков тригонометрических функций путем сжатия и растяжения
y = cos2x
y = cos 0.5x
тригонометрические
функции
вспомнить
правила
1718. Преобразование графиков тригонометрических функций путем сжатия и растяжения
Графики функций у = -f (kx) и у=-k f(x) получаются из
графиков функций у = f(kx) и y= k f(x) соответственно
путем их зеркального отображения относительно оси абсцисс
синус – функция нечетная, поэтому sin(-kx) = — sin (kx)
косинус –функция четная, значит cos(-kx) = cos(kx)
тригонометрические
функции
1819.
Преобразование графиков тригонометрических функций путем сжатия и растяженияy = -3sinx
y = 3sinx
тригонометрические
функции
вспомнить
правила
1920. Преобразование графиков тригонометрических функций путем сжатия и растяжения
y=2cosx
y=-2cosx
вспомнить
правила
тригонометрические
функции
2021. Преобразование графиков тригонометрических функций путем сжатия и растяжения
График функции у = f (kx+b) получается из графика функции
у = f(x) путем его параллельного переноса на (-в/k) единиц
вдоль оси абсцисс и путем сжатия в k раз (при k>1) или
растяжения в k раз ( при 0
f ( kx+b) = f ( k( x+b/k))
тригонометрические
функции
2122. Преобразование графиков тригонометрических функций путем сжатия и растяжения
y= cos(2x+p/3)
y= cos(2(x+p/6))
тригонометрические
функции
y= cos(2x+p/3)
y= cos(2(x+p/6))
y=cos(x+p/6)
y=cos2x
Y= cos(2x+p/3)
Y= cos(2x+p/3)
вспомнить
правила
2223.
Для любознательных…Посмотрите как выглядят графики некоторых других триг. функций:
y = 1 / cos x или y=sec x
(читается секонс)
тригонометрические
функции
y = cosec x или y= 1/ sin x
читается косеконс
23Desmos – онлайн графический калькулятор / Хабр
Случалось ли вам, что нужно быстро нарисовать график функции, а под рукой нет любимой десктопной программы? Меня не раз спасал бесплатный онлайн графический калькулятор от компании Desmos. Мультиязычный интерфейс, в т.ч. с поддержкой русского языка.
Desmos — это онлайн-сервис, который позволяет создавать графики по формуле функции. Сама функция вписывается в левый столбец, а график автоматически строится в правой части. Сервис будет полезен тем, кому необходимо быстро и просто построить график функции, для кого построение графиков функций вызывает сложности или тем, кому с наименьшими затратами необходимо проверить правильность построения графика.
Кроме того, что Desmos Calculator может выполнять все функции обычных графических калькуляторов, он также имеет несколько дополнительных возможностей, которых нет у обычных графических калькуляторов.
Что можно делать в DC:
- рисовать функциями;
- создавать анимированные картинки с помощью привязки объектов к функциям с параметрами;
- создавать динамическую наглядность;
- быстро создавать скриншоты с формулами и функциями.
Desmos Calculator может строить следующие графики:
- Постоянная функция
- Зависимость x от y
- Неравенства
- Графики в полярной системе координат
- Кусочно-заданные функции
- Точка
- Группа точек
- Подвижная точка
- Функции с параметром
- Сложные функции
При построении графиков можно использовать следующие функции:
- Степенные, показательные и логарифмические функции
- Тригонометрические функции
- Обратные тригонометрические функции
- Гиперболические функции
- Статистические функции и функции вероятностей
- Другие функции
В библиотеке готовых приложений можно найти немало динамических апплетов для функций разного типа (от линейной до тригонометрической) со встроенными «ползунками».
Авторизация в сервисе позволяет сохранять созданные апплеты и делиться ими в виде ссылки, встроенного кода или картинки.
Подробную информацию по построению графиков функций вы найдете в источниках, опубликованных в подвале статьи.
Руководство по быстрой публикации графика функции, созданного в Desmos:- Перейти по ссылке https://www.desmos.com/calculator
- Зарегистрируйтесь или войдите в свой аккаунт (правый верхний угол)
- Постройте график нужной функции
- Сохраните график
- Опубликуйте ссылку на свой график или сохраните в виде картинки
Источники:
- Desmos. Руководство пользователя (рус., PDF)
- Desmos. Обучающие материалы (англ.)
- Desmos. Канал с обучающими роликами на YouTube (англ.)
- DESMOS – замечательный инструмент для учителей математики (рус.)
- Применение Desmos на уроках математики в школе (рус. )
Graphical Function Explorer Grapher (GFE)
Graphical Function Explorer Grapher (GFE) — открытый справочник по математикеИнструкция по эксплуатации
GFE — это бесплатный онлайн-инструмент для построения графиков функций, который позволяет строить до трех функций на одном и том же наборе осей. В функциях вы можете ссылаться до четырех независимых переменных, которые управляются ползунками. Это позволяет вам легко увидеть эффект изменений, поскольку графики меняются в реальном времени при перетаскивании ползунков.
Введите формулу в одно из трех полей ввода ( f (x), g (x) или h (x) ), затем нажмите GRAPH или клавиатуру Клавиша ввода. Например:
Нажмите Clear, затем в верхнем функциональном поле (f (x)) введите «cos (x)», затем нажмите GRAPH или клавишу Enter на клавиатуре. Функция будет отображена в окне выше.
Правила синтаксиса такие же, как и для вводимых выражений для Математический / научный калькулятор.
Встроенные функции
GFE имеет следующие встроенные функции.Имена функций не чувствительны к регистру. Пример: sin (x) совпадает с Sin (x). Все тригонометрические функции работают в радианах.
Функция Пример Описание Синус грех (х) Синусоидальная функция тригонометрии, x в радианах. Косинус cos (x) Функция косинуса тригонометрии, x в радианах. Касательная желто-коричневый (x) Функция тангенса тригонометрии, x в радианах. Секант сек (x) Секущая функция тригонометрии, x в радианах. Косеканс csc (x) Тригонометрическая функция косеканса, x в радианах. Котангенс детская кроватка (x) Функция котангенса тригонометрии, x в радианах. Синус дуги asin (x) Угол в радианах, синус которого равен x. Дуговой косинус acos (x) Угол в радианах, косинус которого равен x. Касательная дуга атан (х) Угол в радианах, тангенс которого равен x. Квадратный корень кв.м (x) Квадратный корень из x. Логарифм журнал (x) Лагерь базы 10 х. Степень, в которую вы должны поднять 10, чтобы получить x. Натуральное бревно лин (х) База журнала е x.Степень, в которую вы должны возвести е, чтобы получить x. Опыт эксп. (X) e (приблизительно 2,718) в степени x. Мин. мин (а, б) Возвращает a или b, в зависимости от того, что меньше. Макс макс (а, б) Возвращает a или b, в зависимости от того, что больше. Абс абс (х) Возвращает абсолютное значение x (всегда положительное или нулевое) Pow pow (x, y) Возвращает x в степени y.pow (2,3) = 8 Круглый круглый (х) Возвращает x, округленное до ближайшего целого числа .этаж этаж (х) Возвращает максимальное целое число, меньшее или равное x .потолок ceil (x) Возвращает наименьшее целое число, большее или равное x .Константы
Вы можете ссылаться на две константы. Они не чувствительны к регистру.2.1Научная запись
Научная нотация (например, 1e + 3 для 1000) не поддерживается.Автоматическое умножение
Если перед функцией (например, sin ()) стоит число, GFE предполагает, что вы хотите их умножить. Например 3cos (2.1) будет автоматически обрабатываться так, как если бы вы ввели 3 * cos (2.1): трижды косинус 2.1. Это не сработает, если функции предшествует имя переменной.
Примечание: Эта функция может ввести вас в заблуждение. Например, если вы введете 1 / 2sin (x), GFE вставит умножение между 2 и sin.Поскольку скобок нет, он выполняется слева направо, поэтому он видит в нем половину sin (x). Возможно, вы имели в виду, что он больше 2sin (x).
Автоматическая балансировка скобок
Когда вы нажимаете ГРАФИК или ввод, он автоматически добавляет достаточное количество закрывающих скобок, чтобы сбалансировать их. Например, если вы введете
2+ (sin (x
он добавит две дополнительные закрывающие круглые скобки, чтобы они уравновесили и оценили его как 2+ (sin (x)) Примечание: Это не всегда может дать желаемый результат.Лучше всегда самостоятельно вводить правильное выражение.Графики неравенств
GFE можно использовать для построения неравенств, изменив оператор отношения в раскрывающемся меню слева от функции. Есть пять возможных операторов:
= равно По умолчанию. Функция будет отображаться как обычно в виде линии. Менее
или равноОбласть графика, где y меньше значения функции, заштрихована. Менее То же, что и выше, но линия пунктирная. > = Больше
или равноОбласть графика, где y больше значения функции, заштрихована. > Больше То же, что и выше, но линия пунктирная. Цвет заливки
При нанесении неравенств можно использовать флажок «монохромное затенение».Если этот флажок установлен, все заштрихованные области для всех трех функций будут одинакового светло-серого цвета. Это позволяет вам легче увидеть, где перекрываются сложные функции, поскольку чем больше перекрытие, тем темнее затенение. Если этот флажок не установлен, каждая функция будет выделена другим цветом.
Использование курсора
Если вы нажмете «показать курсор», появится тонкая вертикальная линия. Если вы перетащите эту линию мышью, он показывает значения каждой функции там, где курсор пересекает эту функцию.Вы можете ввести значение x для курсора вручную в текстовое поле в верхнем левом углу. После ввода значения нажмите «График» или клавишу ввода. Если вы введете значение, которое находится за пределами графика, курсор не будет отображаться, но значения функций для этого значения x будут отображаться правильно.
Изменение пределов оси
На каждом конце оси x и y находится поле, содержащее конечные значения.
Чтобы изменить их, просто отредактируйте их на месте и снова нажмите ГРАФИК или клавишу Enter.GFE проверит, что нижнее значение находится внизу оси y или слева от оси x. Допускаются отрицательные числа.
Примечание о соотношении сторон
Соотношение сторон (отношение ширины к высоте) графического окна составляет ровно 4: 3. Начальный диапазон значений по осям x и y находится в одинаковом соотношении, поэтому график y = x будет под углом 45 °, и круги будут круглыми, а не сжатыми в эллипсы. Однако, если вы измените пределы оси, это может измениться.
Использование переменных
Когда вы вводите свои уравнения, вы можете обращаться к четырем переменным, которые управляются ползунками. Они называются a, b, c и d, и вы можете настроить значение каждой переменной, перемещая ползунок вверх или вниз. Вы также можете ввести точное значение в поле вверху ползунка, а затем нажать кнопку ГРАФИК или клавишу Enter.
Например, в приведенной выше таблице нажмите «Сброс».
Обратите внимание, что первая функция — это sin (a * x). Это означает, что каждый раз, когда точка строится, это синус текущего значения x, умноженного на переменную a.Эта переменная управляется ползунком справа, поэтому при перемещении ползунка вы можете увидеть эффект изменения его значения. * Вы можете изменить диапазон ползунка, нажав на «диапазон» под ним. Появится диалоговое окно, в котором вы можете установить диапазон каждого ползунка отдельно.
* Если вам интересно: показанную синусоидальную кривую иногда называют синусоидой. Ползунок a регулирует частоту волны. См. Синусоидальную волну.
Сетка и этикетки
Если вы установите флажок «показывать сетку» (по умолчанию), отображается сетка с отмеченными основными значениями.Поскольку вы можете изменять пределы оси, GFE пытается создать примерно 10 линий сетки со значениями, которые легко интерполировать.Просмотр в полноэкранном режиме
Нажмите на «полный размер» под окном графика.
Откроется новое окно с новым экземпляром GFE, размер которого зависит от вашего монитора.
Это может быть полезно в классе с проектором.Примечание: Большая версия — это копия обычного размера. Любые изменения, внесенные в большой, не будут скопированы обратно в оригинал, когда вы его закроете.
Пользователи Safari: Это будет игнорироваться, если браузер настроен на блокировку всплывающих окон — по умолчанию в Safari. (Такая блокировка не должна происходить строго, поскольку страницы происходят из одного домена).
Сохранить диаграмму как ссылку
Когда у вас есть диаграммы, которые вам нужны, вы можете щелкнуть «Создать ссылку» под апплетом. Это создаст ссылку в диаграмму, которую можно вставить на веб-страницу или документ Word. Когда вы позже нажмете на эту ссылку, диаграмма сразу же появится в том виде, в котором вы этого хотите.Кроме того, вставив адрес обратно в адресную строку браузера и нажав Enter, вы можете сохранить диаграмму в качестве закладки браузера или избранного.
Например, вы можете настроить диаграмму со всеми функциями и диапазонами, которые вам нужны для лекции. Затем, во время лекции, при нажатии на эту ссылку, диаграмма сразу же откроется. Таким образом вы можете настроить неограниченное количество различных графиков.Примечание. Некоторые программы не могут обрабатывать URL-адреса, превышающие определенную длину. (Например, Microsoft Word имеет ограничение в 256 байт).Некоторые очень сложные диаграммы могут давать более длинные URL-адреса.
Пользователи Safari: По умолчанию Safari подавляет всплывающие окна. Теоретически это не должно мешать работе этой функции, но это действительно так. Если вы не видите диалоговое окно для получения ссылки, настройте параметры браузера, чтобы разрешить всплывающие окна.
При желании вы можете создать эти ссылки самостоятельно. см. «Настройка GFE» ниже.
Привязка к целым числам
При установке этого флажка ползунки будут останавливаться только на целых числах.
Настройка GFE
Обычно при запуске GFE отображает диаграмму по умолчанию. Вы можете изменить то, что изначально отображается, добавив параметры к URL-адресу веб-страницы. Вы можете переопределить некоторые или все элементы управления, чтобы отобразить любую желаемую исходную диаграмму.
Инструкции см. В разделе Настройка общего обозревателя функций (GFE). Но самый простой способ — использовать «сохранить как ссылку», как описано выше.
Аномалии графика?
В некоторых случаях может показаться, что на графике есть ошибки.Чтобы узнать больше об этом, см. Ограничения графического инструмента.Разделы о других функциях
(C) Открытый справочник по математике, 2011 г.
Все права защищены.pstricks — Построение тригонометрических функций — TeX
Описание констант, определяемых пользователем:
Обратите внимание: в приведенной выше описательной диаграмме используются константы, чтобы предоставить достаточно места для аннотаций.
В следующем примере используются разные константы.Не запутайтесь!Константы, определенные пользователем:
\ def \ f (# 1) {sin (# 1)}% функция для построения графика \ def \ g (# 1) {1.5 * cos (2 * # 1)}% функция для построения графика \ const {Width} {10}% от общей ширины в см \ const {Height} {4}% от общей высоты в см \ const {POL} {- 0.20}% смещение изображения влево в см \ const {POR} {0.50}% смещение изображения вправо в см \ const {POB} {- 0.20}% смещение нижнего края изображения в см \ const {POT} {0.50}% смещение верхнего края изображения в см \ const {AOL} {- 0.20}% смещение оси влево в см \ const {AOR} {0.30}% смещение оси вправо в см \ const {AOB} {- 0.20}% нижнее смещение оси в см \ const {AOT} {0.30}% смещение вершины оси в см \ const {DomL} {- 2 * pi}% домена осталось \ const {DomR} {2 * pi}% право домена \ const {DomB} {- 2}% домен внизу \ const {DomT} {2}% верхнего уровня домена \ const [0] {TrigLabelBase} {2}% знаменатель доли числа пиВывод и полный код:
\ documentclass [border = 0pt, pstricks] {автономный} \ usepackage {pst-eucl, pstricks-add} \ usepackage [сообщения] {fp} \ newcommand \ const [3] [3] {\ expandafter \ FPeval \ csname # 2 \ endcsname {round (# 3: # 1)}} % Пользовательские данные: \ def \ f (# 1) {sin (# 1)}% функция для построения графика \ def \ g (# 1) {1. 5 * cos (2 * # 1)}% функция для построения графика
\ const {Width} {10}% от общей ширины в см
\ const {Height} {4}% от общей высоты в см
\ const {POL} {- 0.20}% смещение изображения влево в см
\ const {POR} {0.50}% смещение изображения вправо в см
\ const {POB} {- 0.20}% смещение нижнего края изображения в см
\ const {POT} {0.50}% смещение верхнего края изображения в см
\ const {AOL} {- 0.20}% смещение оси влево в см
\ const {AOR} {0.30}% смещение оси вправо в см
\ const {AOB} {- 0.20}% нижнее смещение оси в см
\ const {AOT} {0.30}% смещение вершины оси в см
\ const {DomL} {- 2 * pi}% домена осталось
\ const {DomR} {2 * pi}% право домена
\ const {DomB} {- 2}% домен внизу
\ const {DomT} {2}% верхнего уровня домена
\ const [0] {TrigLabelBase} {2}% знаменатель доли числа пи
% Внутренние используемые константы:
\ const {XUnit} {(Ширина-POR + POL-AOR + AOL) / (DomR-DomL)}
\ const {YUnit} {(Высота-POT + POB-AOT + AOB) / (DomT-DomB)}
\ const {PicL} {(POL + AOL) / XUnit + DomL}
\ const {PicR} {(POR + AOR) / XUnit + DomR}
\ const {PicB} {(POB + AOB) / YUnit + DomB}
\ const {PicT} {(POT + AOT) / YUnit + DomT}
\ const {AxiL} {AOL / XUnit + DomL}
\ const {AxiR} {AOR / XUnit + DomR}
\ const {AxiB} {AOB / YUnit + DomB}
\ const {AxiT} {AOT / YUnit + DomT}
\ const {DeltaX} {pi / TrigLabelBase}
\ psset {xunit = \ XUnit, yunit = \ YUnit, algebraic, plotpoints = 500}
\ begin {document}
\ begin {pspicture} [showgrid = false] (\ PicL, \ PicB) (\ PicR, \ PicT)
\ psplot [цвет линии = красный] {\ DomL} {\ DomR} {\ f (x)}
\ psplot [цвет линии = синий] {\ DomL} {\ DomR} {\ g (x)}
\ psaxes
[
trigLabels = истина,
labelFontSize = \ scriptscriptstyle,
цвет тика = серый,
ticksize = -1. 5pt 1.5pt,
xlabelsep = 3pt,
arrowscale = 1,
trigLabelBase = \ TrigLabelBase,
dx = \ DeltaX,% должен стоять перед xunit, чтобы избежать странного вывода!
] {->} (0,0) (\ AxiL, \ AxiB) (\ AxiR, \ AxiT) [$ x $, 0] [$ y $, 90]
\ end {pspicture}
\ конец {документ}
8.4 Полярные координаты: графики — предварительное вычисление
Цели обучения
В этом разделе вы:
- Проверить полярные уравнения на симметрию.
- Построение полярных уравнений путем нанесения точек.
Планеты движутся в космосе по эллиптическим периодическим орбитам вокруг Солнца, как показано на рисунке 1. Они находятся в постоянном движении, поэтому определение точного положения любой планеты возможно только на мгновение. Другими словами, мы можем зафиксировать только мгновенное положение планеты . Это одно из применений полярных координат, представленных как (r, θ).
(R, θ).
Мы интерпретируем rr как расстояние от Солнца и θθ как угловой пеленг планеты или ее направление от фиксированной точки на Солнце.В этом разделе мы сосредоточимся на полярной системе и графиках, которые создаются непосредственно из полярных координат.Рис. 1 Планеты движутся по эллиптическим траекториям, вращаясь вокруг Солнца. (кредит: модификация работы NASA / JPL-Caltech)
Проверка полярных уравнений на симметрию
Так же, как прямоугольное уравнение, такое как y = x2y = x2, описывает взаимосвязь между xx и yy на декартовой сетке, полярное уравнение описывает взаимосвязь между rr и θθ на полярной сетке.Напомним, что пара координат (r, θ) (r, θ) указывает, что мы перемещаемся против часовой стрелки от полярной оси (положительная ось x ) на угол θ, θ и вытягиваем луч от полюса (начала координат). rr единиц в направлении θ.θ. Все точки, удовлетворяющие полярному уравнению, отображаются на графике.
Симметрия — это свойство, которое помогает нам распознать и построить график любого уравнения. Если уравнение имеет график, симметричный относительно оси, это означает, что если мы сложим график пополам по этой оси, часть графика на одной стороне будет совпадать с частью на другой стороне.Выполнив три теста, мы увидим, как применить свойства симметрии к полярным уравнениям. Далее мы будем использовать симметрию (в дополнение к нанесению ключевых точек, нулей и максимумов r) r) для определения графика полярного уравнения.
В первом тесте мы рассматриваем симметрию относительно прямой θ = π2θ = π2 ( y — ось). Мы заменяем (r, θ) (r, θ) на (−r, −θ) (- r, −θ), чтобы определить, эквивалентно ли новое уравнение исходному уравнению. Например, предположим, что нам дано уравнение r = 2sinθ; r = 2sinθ;
r = 2sinθ − r = 2sin (−θ) Заменим (r, θ) на (−r, −θ).−r = −2sinθIdentity: sin (−θ) = — sinθ.r = 2sinθ Умножаем обе части на −1. R = 2sinθ − r = 2sin (−θ) Заменим (r, θ) на (−r, −θ). −r = −2sinθIdentity: sin (−θ) = — sinθ.r = 2sinθ Умножаем обе части на −1.Это уравнение демонстрирует симметрию относительно прямой θ = π2.θ = π2.
Во втором тесте мы рассматриваем симметрию относительно полярной оси (ось xx). Заменим (r, θ) (r, θ) на (r, −θ) (r, −θ) или (−r, π − θ) (- r, π − θ), чтобы определить эквивалентность между тестируемым уравнением и оригинал. Например, предположим, что нам дано уравнение r = 1−2cosθ.r = 1−2cosθ.
r = 1−2cosθr = 1−2cos (−θ) Заменить (r, θ) на (r, −θ) .r = 1−2cosθEven / Odd identityr = 1−2cosθr = 1−2cos (−θ) Заменить ( r, θ) с (r, −θ) .r = 1−2cosθEven / Odd identityГрафик этого уравнения демонстрирует симметрию относительно полярной оси.
В третьем тесте мы рассматриваем симметрию относительно полюса (начала координат). Мы заменяем (r, θ) (r, θ) на (−r, θ) (- r, θ), чтобы определить, эквивалентно ли тестируемое уравнение исходному уравнению. Например, предположим, что нам дано уравнение r = 2sin (3θ).r = 2sin (3θ).
r = 2sin (3θ) −r = 2sin (3θ) r = 2sin (3θ) −r = 2sin (3θ)Уравнение не прошло проверку на симметрию, но это не означает, что оно не симметрично относительно столб. Прохождение одного или нескольких тестов симметрии подтверждает, что симметрия будет отображаться в графе. Однако отсутствие проверки на симметрию не обязательно означает, что график не будет симметричным относительно линии θ = π2, θ = π2, полярной оси или полюса. В этих случаях мы можем подтвердить, что симметрия существует, нанеся точки отражения поперек кажущейся оси симметрии или полюса.Проверка симметрии — это метод, который упрощает построение графиков полярных уравнений, но его применение не идеально.
Тесты симметрии
Полярное уравнение описывает кривую на полярной сетке. График полярного уравнения можно оценить для трех типов симметрии, как показано на рисунке 2.
Рисунок 2 (a) График симметричен относительно прямой θ = π2θ = π2 ( y -ось), если заменить (r, θ) (r, θ) на (−r, −θ) (- r, −θ) дает эквивалентное уравнение. (b) График симметричен относительно полярной оси ( x -ось), если заменить (r, θ) (r, θ) на (r, −θ) (r, −θ) или (−r, π − θ) (- r, π − θ) дает эквивалентное уравнение. (c) Граф является симметричным относительно полюса (начала координат), если замена (r, θ) (r, θ) на (−r, θ) (- r, θ) дает эквивалентное уравнение.Как сделать
Дано полярное уравнение, проверьте симметрию.
- Подставьте соответствующую комбинацию компонентов вместо (r, θ) 🙁 r, θ): (- r, −θ) (- r, −θ) вместо θ = π2θ = π2 симметрии; (r, −θ) (r, −θ) для симметрии полярной оси; и (−r, θ) (- r, θ) для симметрии относительно полюса.
- Если результирующие уравнения эквивалентны в одном или нескольких тестах, график дает ожидаемую симметрию.
Пример 1
Проверка полярного уравнения на симметрию
Проверьте уравнение r = 2sinθr = 2sinθ на симметрию.
Решение
Тест на каждый из трех типов симметрии.
1) Замена (r, θ) (r, θ) на (−r, −θ) (- r, −θ) дает тот же результат.Таким образом, график симметричен относительно прямой θ = π2.θ = π2. −r = 2sin (−θ) −r = −2sinθ Четно-нечетное тождествоr = 2sinθMultiplyby − 1Passed − r = 2sin (−θ) −r = −2sinθ Четно-нечетное identityr = 2sinθMultiplyby − 1Passed 2) Замена θθ на −θ − θ не дает того же уравнения. Следовательно, график не проходит проверку и может быть или не быть симметричным относительно полярной оси. r = 2sin (−θ) r = −2sinθ Четно-нечетное тождествоr = −2sinθ ≠ 2sinθFailedr = 2sin (−θ) r = −2sinθ Четно-нечетное тождествоr = −2sinθ ≠ 2sinθFailed 3) Замена rr на –r – r изменяет уравнение и не проходит проверку.Граф может быть или не быть симметричным относительно полюса. −r = 2sinθ r = −2sinθ ≠ 2sinθFailed − r = 2sinθ r = −2sinθ ≠ 2sinθFailed Таблица 1
Анализ
Используя графический калькулятор, мы можем увидеть, что уравнение r = 2sinθr = 2sinθ представляет собой круг с центром в точке (0,1) (0,1) и радиусом r = 1r = 1 и действительно симметричен прямой θ = π2. θ = π2. Мы также можем видеть, что график не симметричен полярной оси или полюсу. См. Рисунок 3.
Рисунок 3
Попробуй # 1
Проверьте уравнение на симметрию: r = −2cosθ.r = −2cosθ.
Построение полярных уравнений по точкам
Для построения графика в прямоугольной системе координат мы составляем таблицу значений xx и yy. Для построения графика в полярной системе координат мы строим таблицу значений θθ и rr. Вводим значения θθ в полярное уравнение и вычислить относительную влажность.
Однако использование свойств симметрии и нахождение ключевых значений θθ и rr означает, что потребуется меньше вычислений.Нахождение нулей и максимумов
Чтобы найти нули полярного уравнения, мы решаем значения θθ, которые приводят к r = 0.r = 0. Напомним, что для нахождения нулей полиномиальных функций мы устанавливаем уравнение равным нулю, а затем решаем относительно x.x. Мы используем тот же процесс для полярных уравнений. Установите r = 0, r = 0 и решите относительно θ.θ.
Для многих форм, с которыми мы встретимся, максимальное значение полярного уравнения находится путем подстановки тех значений θθ в уравнение, которые приводят к максимальному значению тригонометрических функций.Рассмотрим r = 5cosθ; r = 5cosθ; максимальное расстояние между изгибом и опорой — 5 единиц. Максимальное значение функции косинуса равно 1, когда θ = 0, θ = 0, поэтому наше полярное уравнение — 5cosθ, 5cosθ, а значение θ = 0θ = 0 даст максимальное значение | r |.
| R |.Аналогично, максимальное значение синусоидальной функции равно 1, когда θ = π2, θ = π2, и если наше полярное уравнение r = 5sinθ, r = 5sinθ, значение θ = π2θ = π2 даст максимум | r | . | г |. Мы можем найти дополнительную информацию, вычислив значения rr, когда θ = 0.θ = 0.Эти точки будут пересечениями полярной оси, что может быть полезно при построении графика и идентификации кривой полярного уравнения.
Пример 2
Нахождение нулей и максимальных значений для полярного уравнения
Используя уравнение из примера 1, найдите нули и максимум | r || r | и, если необходимо, полярная ось пересекает r = 2sinθ.r = 2sinθ.
Решение
Чтобы найти нули, установите rr равным нулю и решите относительно θ.θ.
2sinθ = 0sinθ = 0θ = sin − 10θ = nπ, где n — целое число, 2sinθ = 0sinθ = 0θ = sin − 10θ = nπ, где n — целое числоПодставьте любое из значений θθ в уравнение.Мы будем использовать 0.
0.Точки (0,0) (0,0) и (0, ± nπ) (0, ± nπ) являются нулями уравнения. Все они совпадают, поэтому на графике видна только одна точка. Эта точка также является единственной точкой пересечения полярной оси.
Чтобы найти максимальное значение уравнения, посмотрите на максимальное значение тригонометрической функции sinθ, sinθ, которое возникает, когда θ = π2 ± 2kπθ = π2 ± 2kπ, что приводит к sin (π2) = 1.sin (π2) = 1 . Подставляем π2π2 вместо θ.θ.
r = 2sin (π2) r = 2 (1) r = 2r = 2sin (π2) r = 2 (1) r = 2Анализ
Точка (2, π2) (2, π2) будет максимальным значением на графике.Давайте нарисуем еще несколько точек, чтобы проверить график круга. См. Таблицу 2 и Рисунок 4.
θθ r = 2sinθr = 2sinθ руб. 0 r = 2sin (0) = 0r = 2sin (0) = 0 00 π6π6 r = 2sin (π6) = 1r = 2sin (π6) = 1 11 π3π3 r = 2sin (π3) ≈1. 73r = 2sin (π3) ≈1.731,731,73 π2π2 r = 2sin (π2) = 2r = 2sin (π2) = 2 22 2π32π3 r = 2sin (2π3) ≈1.73r = 2sin (2π3) ≈1.73 1,731,73 5π65π6 r = 2sin (5π6) = 1r = 2sin (5π6) = 1 11 ππ r = 2sin (π) = 0r = 2sin (π) = 0 00 Таблица 2
Рисунок 4
Попробуй # 2
Без преобразования в декартовы координаты, проверьте данное уравнение на симметрию и найдите нули и максимальные значения | r |: | r |: r = 3cosθ.
г = 3cosθ.Следственные круги
Теперь мы увидели уравнение круга в полярной системе координат. В последних двух примерах одно и то же уравнение использовалось для иллюстрации свойств симметрии и демонстрации того, как найти нули, максимальные значения и нанесенные точки, по которым построены графики. Однако круг — лишь одна из многих фигур в наборе полярных кривых.
Есть пять классических полярных кривых : кардиоиды , лимана, лемнискаты, кривые розы и спирали Архимеда .Мы кратко коснемся полярных формул для круга, прежде чем перейти к классическим кривым и их вариациям.
Формулы уравнения окружности
Некоторые формулы, которые создают график круга в полярных координатах, даются как r = acosθr = acosθ и r = asinθ, r = asinθ, где aa — диаметр круга или расстояние от полюса до самой дальней точки. по окружности. Радиус равен | a | 2, | a | 2 или половине диаметра.
Для r = acosθ, r = acosθ центр равен (a2,0).(а2,0). Для r = asinθ, r = asinθ центром является (a2, π2). (A2, π2). На рисунке 5 показаны графики этих четырех кругов.Рисунок 5
Пример 3
Построение графика полярного уравнения для окружности
Нарисуйте график r = 4cosθ.r = 4cosθ.
Решение
Во-первых, проверяя уравнение на симметрию, мы обнаруживаем, что график симметричен относительно полярной оси. Далее находим нули и максимум | r || r | для r = 4cosθ.r = 4cosθ. Сначала установите r = 0, r = 0 и решите относительно θθ.Таким образом, нуль возникает при θ = π2 ± kπ.θ = π2 ± kπ. Ключевой точкой для построения графика является (0, π2). (0, π2).
Чтобы найти максимальное значение r, r, обратите внимание, что максимальное значение функции косинуса равно 1, когда θ = 0 ± 2kπ.θ = 0 ± 2kπ. Подставляем θ = 0θ = 0 в уравнение:
r = 4cosθr = 4cos (0) r = 4 (1) = 4r = 4cosθr = 4cos (0) r = 4 (1) = 4Максимальное значение уравнения составляет 4.
Ключевой точкой для построения графика является (4,0). (4,0).Поскольку r = 4cosθr = 4cosθ симметрично относительно полярной оси, нам нужно только вычислить r -значений для θθ в интервале [0, [0, π].π]. Точки в верхнем квадранте затем могут быть отражены в нижний квадрант. Составьте таблицу значений, аналогичную Таблице 3. График показан на Рисунке 6 .
θθ 0 π6π6 π4π4 π3π3 π2π2 2π32π3 3π43π4 5π65π6 ππ руб. 4 3.46 2,83 2 0 -2 -2,83 −3,46 −4 Таблица 3
Рисунок 6
Исследование кардиоидов
Хотя перевод полярных координат в декартовы координаты в некоторых случаях может показаться проще, построение классических кривых в полярной системе на самом деле менее сложно.Следующая кривая называется кардиоидной, так как она напоминает сердце. Эту форму часто включают в семейство кривых, называемых лимасонами, но здесь мы обсудим кардиоиду отдельно.
Формулы кардиоиды
Формулы, по которым строятся графики кардиоиды, имеют следующий вид: r = a ± bcosθr = a ± bcosθ и r = a ± bsinθr = a ± bsinθ, где a> 0, a> 0, b> 0, b> 0 и ab = 1.
ab = 1. Кардиоидный график проходит через полюс, как мы видим на Рисунке 7.Рисунок 7
Как сделать
Дан полярное уравнение кардиоиды, нарисуйте ее график.
- Проверьте уравнение для трех типов симметрии.
- Найдите нули. Установите r = 0. r = 0.
- Найдите максимальное значение уравнения согласно максимальному значению тригонометрического выражения.
- Составьте таблицу значений для rr и θ.θ.
- Постройте точки и нарисуйте график.
Пример 4
Построение графика кардиоиды
Нарисуйте график r = 2 + 2cosθ.r = 2 + 2cosθ.
Решение
Во-первых, проверяя уравнение на симметрию, мы обнаруживаем, что график этого уравнения будет симметричным относительно полярной оси.Далее находим нули и максимумы. Полагая r = 0, r = 0, имеем θ = π + 2kπ.
θ = π + 2kπ. Нуль уравнения находится в точке (0, π). (0, π). График проходит через эту точку.Максимальное значение r = 2 + 2cosθr = 2 + 2cosθ возникает, когда cosθcosθ является максимальным, то есть когда cosθ = 1cosθ = 1 или когда θ = 0.θ = 0. Подставляем θ = 0θ = 0 в уравнение и решаем относительно r.r.
r = 2 + 2cos (0) r = 2 + 2 (1) = 4r = 2 + 2cos (0) r = 2 + 2 (1) = 4Точка (4,0) (4,0) равна максимальное значение на графике.
Мы обнаружили, что полярное уравнение симметрично относительно полярной оси, но поскольку оно распространяется на все четыре квадранта, нам нужно построить значения в интервале [0, π].[0, π]. Затем верхняя часть графика отражается над полярной осью. Далее мы составляем таблицу значений, как в Таблице 4, а затем наносим точки и рисуем график. См. Рисунок 8.
θθ 00 π4π4 π2π2 2π32π3 ππ руб. 4 3,41 2 1 0 Таблица 4
Рисунок 8
Исследование Лимасона
Слово limaçon на старофранцузском означает «улитка», имя, которое описывает форму графа.Как упоминалось ранее, кардиоида является членом семейства limaçon, и мы можем видеть сходство на графиках. Другие изображения в этой категории включают лимит с одной петлей и с двумя петлями (или с внутренней петлей). Лимасоны с одной петлей иногда называют ямчатыми, если 1
Формулы для лимасонов с одним циклом
Формулы, по которым строится график однопетлевого лимака с ямочками, задаются следующим образом: r = a ± bcosθr = a ± bcosθ и r = a ± bsinθr = a ± bsinθ, где a> 0, b> 0, a> 0, b > 0 и 1
 и 1
и 1 Рисунок 9 Лимасоны с ямочками
Как сделать
Дан полярное уравнение для лимона с одной петлей, нарисуйте график.
- Проверьте уравнение на симметрию. Помните, что невыполнение теста на симметрию не означает, что форма не будет демонстрировать симметрию. Часто симметрия может проявляться при нанесении точек.
- Найдите нули.
- Найдите максимальные значения в соответствии с тригонометрическим выражением.
- Сделайте стол.
- Постройте точки и нарисуйте график.
Пример 5
Построение графика однопетлевой Лимасон
Изобразите уравнение r = 4−3sinθ.r = 4−3sinθ.
Решение
Во-первых, проверяя уравнение на симметрию, мы обнаруживаем, что оно не проходит все три теста на симметрию, что означает, что график может или не может демонстрировать симметрию, поэтому мы не можем использовать симметрию, чтобы помочь нам построить график.
Однако это уравнение имеет график, который четко показывает симметрию относительно линии θ = π2, θ = π2, но не проходит все три теста на симметрию.Графический калькулятор сразу же продемонстрирует качество отражения графика.Затем мы находим нули и максимум и наносим на график точки отражения для проверки симметрии. Установка r = 0r = 0 приводит к тому, что θθ не определен. Что это значит? Как могло θθ быть неопределенным? Угол θθ не определен ни при каком значении sinθ> 1. sinθ> 1. Следовательно, θθ не определено, потому что не существует значения θθ, для которого sinθ> 1. sinθ> 1. Следовательно, граф не проходит через полюс. Возможно, график действительно пересекает полярную ось, но не на полюсе.Мы можем исследовать другие точки пересечения, вычислив rr, когда θ = 0.θ = 0.
r (0) = 4−3sin (0) r = 4−3⋅0 = 4r (0) = 4−3sin (0) r = 4−3⋅0 = 4Итак, имеется хотя бы одна полярная ось перехватить в (4,0). (4,0).
Далее, поскольку максимальное значение синусоидальной функции равно 1 при θ = π2, θ = π2, мы подставим θ = π2θ = π2 в уравнение и решите относительно r.
r. Таким образом, r = 1.r = 1.Составьте таблицу координат, аналогичную таблице 5.
θθ 00 π6π6 π3π3 π2π2 2π32π3 5π65π6 ππ 7π67π6 4π34π3 3π23π2 5π35π3 11π611π6 2π2π руб. 4 2. 51,4 1 1,4 2,5 4 5,5 6,6 7 6,6 5,5 4 Таблица 5
График показан на Рисунке 10.
Рисунок 10 Лимасон с одной петлей
Анализ
Это пример кривой, для которой составление таблицы значений критически важно для построения точного графика.Тесты на симметрию терпят неудачу; ноль не определен. Хотя может быть очевидно, что уравнение, включающее sinθsinθ, вероятно, симметрично относительно линии θ = π2, θ = π2, оценка большего количества точек помогает проверить правильность графика.
Попробуй # 3
Нарисуйте график r = 3−2cosθ.r = 3−2cosθ.
Другой тип лимака, лимит внутренней петли , назван в честь петли, образованной внутри общей формы лимака. Он был открыт немецким художником Альбрехтом Дюрером (1471-1528), который раскрыл метод рисования лимасона с внутренней петлей в своей книге 1525 года Underweysung der Messing .Спустя столетие отец математика Блеза Паскаля, Этьен Паскаль (1588–1651), открыл его заново.
Формулы для внутреннего цикла Limaçons
Формулы, которые порождают лимасоны внутреннего цикла, задаются как r = a ± bcosθr = a ± bcosθ и r = a ± bsinθr = a ± bsinθ, где a> 0, a> 0, b> 0, b> 0 и а <ба <б. График лимасона внутренней петли проходит через полюс дважды: один раз для внешнего цикла и один раз для внутреннего цикла. Графики см. На Рисунке 11.
Рисунок 11
Пример 6
Построение графика внутренней петли Лимасон
Нарисуйте график r = 2 + 5cosθ.
г = 2 + 5cosθ.Решение
Проверяя симметрию, мы обнаруживаем, что график уравнения симметричен относительно полярной оси. Затем поиск нулей показывает, что при r = 0, r = 0, θ = 1,98. Θ = 1,98. Максимум | r || r | находится, когда cosθ = 1cosθ = 1 или когда θ = 0.θ = 0. Таким образом, максимум находится в точке (7, 0).
Несмотря на то, что мы нашли симметрию, ноль и максимум, нанесение большего количества точек поможет определить форму, и тогда появится узор.
См. Таблицу 6.
θθ 00 π6π6 π3π3 π2π2 2π32π3 5π65π6 ππ 7π67π6 4π34π3 3π23π2 5π35π3 11π611π6 2π2π руб. 7 6.3 4,5 2 -0,5 -2,3 −3 -2,3 -0,5 2 4,5 6,3 7 Таблица 6
Как и ожидалось, значения начинают повторяться после θ = π.θ = π. График показан на рисунке 12.
Рисунок 12 Лимасон с внутренним контуром
Исследование лемнискат
Лемниската — это полярная кривая, напоминающая символ бесконечности ∞∞ или цифру 8.Расположенная в центре полюса лемниската по определению симметрична.
Формулы для лемнискат
Формулы, образующие график лемнискаты, имеют вид r2 = a2cos2θr2 = a2cos2θ и r2 = a2sin2θr2 = a2sin2θ, где a ≠ 0.a ≠ 0. Формула r2 = a2sin2θr2 = a2sin2θ симметрична относительно полюса. Формула r2 = a2cos2θr2 = a2cos2θ симметрична относительно полюса, прямой θ = π2, θ = π2 и полярной оси. Графики см. На Рисунке 13.
Рисунок 13
Пример 7
Построение графика лемнискаты
Нарисуйте график r2 = 4cos2θ.r2 = 4cos2θ.
Решение
Уравнение демонстрирует симметрию относительно прямой θ = π2, θ = π2, полярной оси и полюса.
Давай найдем нули. Сейчас это должно быть обычным делом, но мы подойдем к этому уравнению немного иначе, сделав замену u = 2θ.u = 2θ.
0 = 4cos2θ0 = 4cosu0 = cosucos − 10 = π2u = π2 Заменить 2θ на u. 2θ = π2θ = π40 = 4cos2θ0 = 4cosu0 = cosucos − 10 = π2u = π2 Заменить 2θ обратно на u. 2θ = π2θ4 = π4 9 точка (0, π4) (0, π4) является нулем уравнения.А теперь найдем максимальное значение. Поскольку максимум cosu = 1 cosu = 1, когда u = 0, u = 0, максимум cos2θ = 1cos2θ = 1, когда 2θ = 0,2θ = 0. Таким образом,
r2 = 4cos (0) r2 = 4 (1) = 4r = ± 4 ± 2r2 = 4cos (0) r2 = 4 (1) = 4r = ± 4 ± 2У нас есть максимум на (2, 0). Поскольку этот график симметричен относительно полюса, линии θ = π2, θ = π2 и полярной оси, нам нужно только построить точки в первом квадранте.
Составьте таблицу, аналогичную таблице 7.
θθ 0 π6π6 π4π4 руб. ± 2 ± 2 ± 2 ± 2 0 Таблица 7
Нанесите точки на график, например, показанный на рисунке 14.
Рисунок 14 Лемниската
Анализ
Выполнение такой замены, как u = 2θu = 2θ, является обычной практикой в математике, поскольку она может упростить вычисления. Однако мы не должны забывать заменять заменяющий член исходным членом в конце, а затем решать неизвестное.
Некоторые точки на этом графике могут не отображаться при использовании функции Trace на графическом калькуляторе TI-84, а таблица калькулятора может показывать ошибку для тех же самых точек r.р. Это потому, что для этих значений θ.θ нет реальных квадратных корней. Другими словами, соответствующие r -значения 4cos (2θ) 4cos (2θ) являются комплексными числами, потому что под корнем стоит отрицательное число.
Исследование кривых розы
Следующий тип полярного уравнения дает форму лепестка, называемую кривой розы. Хотя графики выглядят сложными, простое полярное уравнение порождает закономерность.
Кривые розы
Формулы, которые создают график кривой розы, задаются как r = acosnθr = acosnθ и r = asinnθr = asinnθ, где a ≠ 0.а ≠ 0. Если nn четное, кривая имеет 2n2n лепестков. Если nn нечетное, кривая имеет nn лепестков. См. Рисунок 15.
Рисунок 15
Пример 8
Построение графика кривой розы (
n четных)Нарисуйте график r = 2cos4θ.r = 2cos4θ.
Решение
Проверяя симметрию, мы снова обнаруживаем, что тесты симметрии не раскрывают всей картины. График симметричен не только относительно полярной оси, но и относительно прямой θ = π2θ = π2 и полюса.
Теперь найдем нули. Сначала сделаем замену u = 4θ.u = 4θ.
0 = 2cos4θ0 = cos4θ0 = cosucos − 10 = uu = π24θ = π2θ = π80 = 2cos4θ0 = cos4θ0 = cosucos − 10 = uu = π24θ = π2θ = π8Ноль равен θ = π8.θ = π8. Точка (0, π8) (0, π8) находится на кривой.
Далее находим максимум | r |. | R |. Мы знаем, что максимальное значение cosu = 1cosu = 1 при θ = 0.θ = 0. Таким образом,
r = 2cos (4⋅0) r = 2cos (0) r = 2 (1) = 2r = 2cos (4⋅0) r = 2cos (0) r = 2 (1) = 2Точка (2,0) (2,0) находится на кривой.
График кривой розы обладает уникальными свойствами, которые раскрыты в Таблице 8.
θθ 0 π8π8 π4π4 3π83π8 π2π2 5π85π8 3π43π4 руб. 2 0 -2 0 2 0 -2 Таблица 8
Поскольку r = 0r = 0 при θ = π8, θ = π8, имеет смысл разделить значения в таблице на π8π8 единиц.
Рисунок 16 Кривая розетки, nn четное Возникает определенная закономерность. Посмотрите на диапазон значений r : 2, 0, −2, 0, 2, 0, −2 и т. Д. Это представляет развитие кривой по одному лепестку за раз. Начиная с r = 0, r = 0, каждый лепесток простирается на расстояние r = 2, r = 2, а затем возвращается к нулю 2n2n раз, всего восемь лепестков. См. График на рисунке 16.Анализ
Когда эти кривые нарисованы, лучше всего наносить точки по порядку, как в таблице 8. Это позволяет нам увидеть, как график достигает максимума (кончик лепестка), петляет, пересекая полюс, попадает в противоположный максимум, и петли обратно к полюсу.Действие продолжается до тех пор, пока не будут нарисованы все лепестки.
Попробуй # 4
Нарисуйте график r = 4sin (2θ) .r = 4sin (2θ).
Пример 9
Построение графика кривой розы (
n Odd)Нарисуйте график r = 2sin (5θ) .
r = 2sin (5θ).Решение
График уравнения показывает симметрию относительно прямой θ = π2.θ = π2. Далее найдите нули и максимум. Мы хотим сделать замену u = 5θ.и = 5θ.
0 = 2sin (5θ) 0 = sinusin − 10 = 0u = 05θ = 0θ = 00 = 2sin (5θ) 0 = sinusin − 10 = 0u = 05θ = 0θ = 0Максимальное значение рассчитывается при угле, где sinθsinθ является максимум. Следовательно,
r = 2sin (5⋅π2) r = 2 (1) = 2r = 2sin (5⋅π2) r = 2 (1) = 2Таким образом, максимальное значение полярного уравнения равно 2. Это длина каждого лепестка. Поскольку кривая для нечетных nn дает то же количество лепестков, что и n, n, на графике будет пять лепестков. См. Рисунок 17.
Рисунок 17 Кривая розы, nn нечетноеСоздайте таблицу значений, подобную Таблице 9.
θθ 0 π6π6 π3π3 π2π2 2π32π3 5π65π6 ππ руб. 0 1 -1,73 2 -1,73 1 0 Таблица 9
Попробуй # 5
Нарисуйте график r = 3cos (3θ).г = 3cos (3θ).
Исследование спирали Архимеда
Последнее полярное уравнение, которое мы обсудим, — это спираль Архимеда, названная в честь ее первооткрывателя, греческого математика Архимеда (ок. 287 г. до н. Э. — ок. 212 г. до н. Э.), Которому приписывают многочисленные открытия в области геометрии и механики.
Спираль Архимеда
Формула, по которой строится график спирали Архимеда, имеет вид r = θr = θ для θ≥0.θ≥0. При увеличении θθ rr увеличивается с постоянной скоростью по постоянно расширяющемуся, нескончаемому спиралевидному пути.
См. Рисунок 18.Рисунок 18
Порядок действий
Дан спираль Архимеда над [0,2π], [0,2π], нарисуйте график.
- Составьте таблицу значений для rr и θθ в заданной области.
- Постройте точки и нарисуйте график.
Пример 10
Построение графика спирали Архимеда
Нарисуйте график r = θr = θ на [0,2π]. [0,2π].
Решение
Поскольку rr равно θ, θ, график спирали Архимеда начинается на полюсе в точке (0, 0).Хотя график намекает на симметрию, формальной симметрии в отношении прохождения тестов симметрии нет. Кроме того, нет максимального значения, если домен не ограничен.
Создайте таблицу, такую как Таблица 10.
θθ π4π4 π2π2 ππ 3π23π2 7π47π4 2π2π руб. 0.785 1,57 3,14 4,71 5,50 6,28 Таблица 10
Обратите внимание, что значения r — это просто десятичная форма угла, измеренного в радианах. Мы можем видеть их на графике на Рисунке 19.
Рисунок 19 Спираль Архимеда
Анализ
Область этой полярной кривой составляет [0,2π]. [0,2π]. В общем, однако, область определения этой функции — (−∞, ∞).(−∞, ∞). Изобразить уравнение спирали Архимеда довольно просто, хотя изображение кажется сложным.
Попробуй # 6
Нарисуйте график r = −θr = −θ на интервале [0,4π]. [0,4π].
Сводка кривых
В этом разделе мы исследовали ряд, казалось бы, сложных полярных кривых.
На рисунках 20 и 21 представлены графики и уравнения для каждой из этих кривых.Рисунок 20
Рисунок 21
8.Упражнения из 4 частей
Устные
1.Опишите три типа симметрии в полярных графах и сравните их с симметрией декартовой плоскости.
2.Какой из трех типов симметрии полярных графов соответствует симметрии относительно оси x , оси y и начала координат?
3.Какие шаги необходимо выполнить при построении полярных уравнений в виде графиков?
4.Опишите формы графиков кардиоидов, лимаконов и лемнискат.
5.Какая часть уравнения определяет форму графика полярного уравнения?
Графический
Для следующих упражнений проверьте уравнение на симметрию.
14.r = 31 − cos2θr = 31 − cos2θ
Для следующих упражнений нарисуйте полярное уравнение. Определите имя формы.
32.r2 = 36cos (2θ) r2 = 36cos (2θ)
33.r2 = 10cos (2θ) r2 = 10cos (2θ)
35.r2 = 10sin (2θ) r2 = 10sin (2θ)
Технологии
Для следующих упражнений используйте графический калькулятор, чтобы нарисовать график полярного уравнения.
46. r = 2sinθtanθ, r = 2sinθtanθ, циссоид
47.r = 21 − sin2θr = 21 − sin2θ, гиппопед
49.r = 2 − sin (2θ) r = 2 − sin (2θ)
Для следующих упражнений используйте графическую утилиту для построения графика каждой пары полярных уравнений в области [0,4π] [0,4π], а затем объясните различия, показанные на графиках.
55.r = θ, r = θ + sinθr = θ, r = θ + sinθ
56.r = sinθ + θ, r = sinθ − θr = sinθ + θ, r = sinθ − θ
57.r = 2sin (θ2), r = θsin (θ2) r = 2sin (θ2), r = θsin (θ2)
58.r = sin (cos (3θ)) r = sin (3θ) r = sin (cos (3θ)) r = sin (3θ)
59.В графической утилите: график r = sin (165θ) r = sin (165θ) на [0 [0, 4π] 4π], [0 [0, 8π] 8π], [0 [0, 12π] 12π ] и [0 [0, 16π] .16π]. Опишите эффект увеличения ширины домена.
60.В графической утилите: график и эскиз r = sinθ + (sin (52θ)) 3r = sinθ + (sin (52θ)) 3 на [0,4π]. [0,4π].
61.В графической утилите нанесите на график каждое полярное уравнение. Объясните сходства и различия, которые вы наблюдаете на графиках.
r1 = 3sin (3θ) r2 = 2sin (3θ) r3 = sin (3θ) r1 = 3sin (3θ) r2 = 2sin (3θ) r3 = sin (3θ) 62.С помощью графической утилиты нанесите на график каждое полярное уравнение. Объясните сходства и различия, которые вы наблюдаете на графиках.
r1 = 3 + 3cosθr2 = 2 + 2cosθr3 = 1 + cosθr1 = 3 + 3cosθr2 = 2 + 2cosθr3 = 1 + cosθ 63.С помощью графической утилиты нанесите на график каждое полярное уравнение. Объясните сходства и различия, которые вы наблюдаете на графиках.
r1 = 3θr2 = 2θr3 = θr1 = 3θr2 = 2θr3 = θРасширения
Для следующих упражнений нарисуйте каждое полярное уравнение на одном и том же наборе полярных осей и найдите точки пересечения.
64.r1 = 3 + 2sinθ, r2 = 2r1 = 3 + 2sinθ, r2 = 2
65.r1 = 6−4cosθ, r2 = 4r1 = 6−4cosθ, r2 = 4
66.r1 = 1 + sinθ, r2 = 3sinθr1 = 1 + sinθ, r2 = 3sinθ
67.r1 = 1 + cosθ, r2 = 3cosθr1 = 1 + cosθ, r2 = 3cosθ
68.r1 = cos (2θ), r2 = sin (2θ) r1 = cos (2θ), r2 = sin (2θ).
69.r1 = sin2 (2θ) r1 = sin2 (2θ), r2 = 1 − cos (4θ) r2 = 1 − cos (4θ).
70.r1 = 3, r2 = 2sin (θ) r1 = 3, r2 = 2sin (θ)
71.r12 = sinθ, r22 = cosθr12 = sinθ, r22 = cosθ
72.r1 = 1 + cosθr1 = 1 + cosθ, r2 = 1 − sinθr2 = 1 − sinθ.
Калькулятор тригонометриионлайн
Расширенный калькулятор тригонометрии — это небольшое, простое приложение с командной строкой, специально разработанное для помощи в расчетах тригонометрии.найти недостающие углы и стороны, если вы…). Часто используемые формулы, такие как калькулятор тригонометрии sin, cos, tan, можно сохранить как макросы. Онлайн-калькуляторы; Все математические калькуляторы :: Тригонометрические калькуляторы :: Решатель тригонометрических уравнений; Решатель тригонометрических уравнений. Матричный калькулятор. Калькулятор тригонометрии. Практикуйте свои математические навыки и учитесь шаг за шагом с помощью нашего математического решателя. ENG • ESP. На главную / Математика / Тригонометрические функции (Rad) Вычисляет тригонометрические функции с учетом угла в радианах.Интерактивный бесплатный онлайн-калькулятор для построения графиков от GeoGebra: функции графиков, данные для построения графиков, ползунки перетаскивания и многое другое! Он предоставляет пользователям полноценный калькулятор и • Введите математическую задачу. Полный учебный план упражнений и видео. Важный! Бесплатный калькулятор тригонометрических уравнений — решайте тригонометрические уравнения шаг за шагом. Поддержка по телефону доступна с понедельника по пятницу с 9:00 до 22:00 по восточноевропейскому времени. Precise Calculator — это программа калькулятора для Windows, которая является бесплатным и открытым исходным кодом. Онлайн-калькулятор.Два других значения будут заполнены. Некоторые из них включают Sin, Cos, Tan, Csc, Sec и многие другие. Калькулятор синусов. Изучите тригонометрию бесплатно — прямоугольные треугольники, единичный круг, графики, тождества и многое другое. Этот набор калькуляторов тригонометрии, безусловно, должен помочь в этом. Нажмите кнопку =, чтобы рассчитать результат. Решать. Список справки по математике — признан лучшим калькулятором: электронная почта с калькулятором процентов. Как пользоваться калькулятором тригонометрии? Тригнометрические выражения — это выражения, которые включают синус-функции, косинус-функции, касательные функции. .. Упростите тригонометрическое выражение. Калькулятор арксинуса. Калькулятор тригонометрии. Радианы в градусах () • Нажмите, чтобы сфотографировать проблему. Калькулятор тригонометрии Щелкните здесь, чтобы просмотреть краткое руководство по тригонометрии. Вы можете просмотреть диапазоны на графиках обратной тригонометрической функции. Найдите больше образовательных виджетов в Wolfram | Alpha. Калькулятор тригонометрии — это бесплатный онлайн-инструмент, который отображает значения шести важных тригонометрических функций. Все калькуляторы в указанной выше категории калькуляторов тригонометрии разработаны с учетом удобства пользователя.Код для добавления этой кальки на ваш сайт. Поддерживает ввод десятичных чисел (0,5, 6, -1 и т. Д.) С помощью этой бесплатной загрузки калькулятора тригонометрии пользователи могут многое сделать на основе множества функций, которые он отображает. С легкостью решайте тригонометрические интегралы с помощью нашего бесплатного онлайн-калькулятора. Первым шагом использования калькулятора является выбор тригонометрической функции. Этот онлайн-калькулятор вычисляет значения элементарных тригонометрических функций, таких как sin, cos, tg, ctg, sec, cosec для угла, который может быть задан в градусах, радианах или градусах.Онлайн-инструмент для вычисления арксинуса с выводом в градусах или радианах. список переменных матрицы вычислений статистики тригонометрии алгебры. Подробные пошаговые решения ваших задач тригонометрических интегралов онлайн с помощью нашего математического решателя и калькулятора. Главная Калькуляторы Мобильные приложения Курсы математики Математические игры. Практика построения графиков решений; Бета геометрии; Шпаргалки по группам записных книжек; Войти ; Присоединиться; Обновление; Детали учетной записи Параметры входа в систему Настройки управления учетной записью • trig_calculator онлайн. Этот тригонометрический калькулятор поможет вам вычислить тригонометрические функции, такие как синус, косинус, тангенс, котангенс, секанс, косеканс.Описание: Этот калькулятор позволяет вычислять тригонометрические выражения с помощью различных тригонометрических формул. Другая платформа Да, Onlinecalculator.guru — это надежный веб-портал, который предлагает бесплатные онлайн-калькуляторы тригонометрии по всем темам. Распечатать . Вычисляйте тригонометрические интегралы и получайте пошаговое объяснение каждого решения. Большой выбор бесплатных онлайн-калькуляторов тригонометрии на GIGAcalculator.com. и дроби (1/4, 2/3, 4/3, 1/3 и т. д. Темы Вход в систему. Калькулятор может вычислять тригонометрические, экспоненциальные, гамма-функции и функции Бесселя для комплексного числа.Используя этот сайт, вы соглашаетесь с нашей Политикой в отношении файлов cookie. Помимо этого, его также можно использовать для выполнения некоторых других математических вычислений. Калькулятор найдет точные или приблизительные решения по индивидуальному заказу. В поле со списком выберите тип угла: градусы (°) или радианы (рад). Онлайн-калькулятор тригонометрии BYJU ™ S ускоряет вычисления и отображает тригонометрические значения за доли секунды. Узнать больше Принять. Калькулятор исчисления. Калькулятор. функция: угол θ: радианы (используйте пи вместо Ï €) Голос клиента.Онлайн калькулятор тригонометрических интегралов с решением и шагами. Изучите тригонометрию бесплатно — прямоугольные треугольники, единичный круг, графики, тождества и многое другое. Решенные упражнения тригонометрических интегралов. Этот калькулятор тригонометрии использует режим [RAD] или режим радиан. Калькулятор автоматически определяет количество правильных цифр в результате операции и возвращает его точный результат. Вычислите значение любой тригонометрической функции с помощью нашего калькулятора тригонометрии. Используется для тригонометрических расчетов.Но для этого вы должны иметь базовые знания о командах, используемых для достижения желаемых результатов. Простой калькулятор углов для прямоугольных треугольников. Этот калькулятор может решать основные тригонометрические уравнения, такие как: $ \ color {blue} {\ sin (x) = \ frac {1} {2}} $ или $ \ color {blue} {\ sqrt {2} \ cos \ left (- \ frac {3x} {4} \ right) — 1 = 0} $. Скачать калькулятор тригонометрии, как получить многочлен в результате уравнения вычитания, упорядочивая дроби от наименьшего к наибольшему. Введите значения трех из шести сторон и углов треугольника, и остальные три значения будут вычислены.Калькуляторы Темы Методы решения Премиум. Постройте график своих математических задач. Единицы измерения угла: Угол: ° Площадь: Сторона: Сторона: Угол: ° Сторона: Угол: ° Очистить: Инструкции по вычислению треугольников. калькуляторы. Средство визуализации математических выражений, графики, конвертер единиц, средство решения уравнений, комплексные числа, история вычислений. Advanced Trigonometry Calculator — это приложение, которое поможет вам выполнять сложные вычисления с научным представлением и амплитудами в положительных и отрицательных аргументах. Чтобы ввести значение, щелкните внутри одного из текстовых полей.Как пользоваться калькулятором тригонометрии. Калькулятор тригонометрии — калькулятор угла. Чтобы вычислить sin (x) на калькуляторе: Введите входной угол. Также изучите множество других калькуляторов, охватывающих геометрию, математику и другие темы. Используйте этот калькулятор арксинуса, чтобы легко вычислить арксинус числа. ЧАСТО ЗАДАВАЕМЫЕ ВОПРОСЫ. Вход>>> Вход. Advanced Trigonometry Calculator — это простая бесплатная программа, которую можно использовать для решения тригонометрических задач. Факторизация суммы и разности двух кубиков, Средняя школа с pizzazz… Использует тригонометрию для вычисления различных размеров любого треугольника.Красивый бесплатный научный онлайн-калькулятор с расширенными функциями для вычисления процентов, дробей, экспоненциальных функций, логарифмов, тригонометрии, статистики и многого другого. Пожалуйста, попробуйте. Тригонометрические интегралы. Калькулятор тригонометрической функции Используйте тригонометрический калькулятор для вычисления значения любой тригонометрической функции. Математические онлайн-калькуляторы Тригонометрия Графический калькулятор Math. Узнайте, как решать задачи и покажите свою работу, а также получите определения математических понятий. 2 — 2ab \ cos \ gamma ~~ $, чтобы решить наклонный треугольник i.е. Калькулятор прямоугольного треугольника для вычисления длины стороны, угла, высоты, площади и периметра прямоугольного треугольника с любыми двумя значениями. Нажмите кнопку «Рассчитать», чтобы найти все неизвестные переменные. 3. Рассчитайте неизвестные углы или длину, введя ЛЮБЫЕ ДВЕ (2) известные переменные в текстовые поля. Как отмечает Академия Хана, тригонометрия — это «изучение свойств треугольников», и она используется во всем: от астрономии до спутниковых систем, архитектуры и многого другого. Ниже представлена коллекция из 158 триггерных калькуляторов, разделенных по типу и уровню навыков.Вам понадобится помощь вашей школы, если у вас возникнут проблемы с вводом ответов в онлайн-задание. Как решать задачи тригонометрии на калькуляторе? Калькулятор тригонометрического синуса. Вы можете поговорить с членом нашей службы поддержки клиентов по телефону 1-800-876-1799. Он содержит калькуляторы, такие как угол возвышения, угол наклона, основание треугольника, добавление функций касательных, добавление функций синуса, угол между диагональю куба и т. Д. B. Функции кнопки тригонометрии AB.1 Основные функции кнопок тригонометрии. Этот калькулятор тригонометрии невероятно прост в использовании. В Интернете доступно множество ресурсов, которые помогут вам в изучении тригонометрии. Попробуйте бесплатный калькулятор Mathway и средство решения задач ниже, чтобы попрактиковаться в различных математических темах. Посетите этот веб-сайт и сделайте ваши длительные вычисления sin, cos, tan настолько легкими и быстрыми. Например, cos (1) совпадает с cos 1 Rad. Некоторые калькуляторы используют RAD Mode или Radian (1 RAD = 57 296 °) в качестве стандартной настройки. Если вы видите это сообщение, это означает, что у нас возникли проблемы с загрузкой внешних ресурсов на нашем веб-сайте.Калькулятор тригонометрии. Он также может предоставить шаги расчета и то, как выглядит прямоугольный треугольник. Ознакомьтесь со всеми нашими онлайн-калькуляторами здесь! Калькулятор синусов. Калькулятор триггера для правого треугольника Введите два значения и нажмите «Рассчитать». Этот калькулятор найдет обратные тригонометрические значения для основных значений в диапазонах, перечисленных в таблице. Калькулятор доказательства тригонометрических идентичностей Получите подробные решения своих математических задач с помощью нашего пошагового калькулятора доказательства тригонометрических идентичностей.Щелкните [DEG], чтобы изменить режим градусов. Калькулятор тригонометрии Калькулятор тригонометрии используется для определения тригонометрических функций входных параметров. Онлайн-калькуляторы; Все математические калькуляторы :: Калькуляторы плоской геометрии :: Калькулятор закона синуса и косинуса; Калькулятор закона синуса и косинуса. Как упорядочить дроби от наименьшего к наибольшему, отрицательные показатели TI-84, ИНСТРУКЦИИ ПО КАЛЬКУЛЯТОРУ TI-84 PLUS ДЛЯ КВАДРАТНОГО КОРНЯ В ГРАФИКЕ, рабочие листы на английском языке год 10. Бесплатный онлайн-калькулятор научной нотации.Это онлайн-калькулятор тригонометрии, позволяющий узнать эквивалентные значения радианов и градусов для данного числа. Тригонометрия — это сложная область обучения, и она, безусловно, помогает иметь под рукой быстрый и простой в использовании инструмент. Получите бесплатный виджет «Решатель тригонометрических уравнений» для своего веб-сайта, блога, WordPress, Blogger или iGoogle. Получите пошаговые объяснения. Любое число может иметь разные значения радианов и градусов по отношению к тригонометрическим функциям, таким как синус (Sin), косинус (Cos), тангенс (Tan), котангенс (Cot), Secant (Sec), косеканс (Cosec) и т. Д.Решать сложные задачи по физике, математике и инженерии. Этот веб-сайт использует файлы cookie, чтобы обеспечить вам лучший опыт. Вы можете настроить точность результатов. Полный учебный план упражнений и видео. Инструмент на вашей стороне введите числовой калькулятор тригонометрии онлайн в таблице, затем в поле Sec и многие другие. Из вашей школы, если вы видите это сообщение, это означает «повторно». Найдите графики обратной тригонометрической функции. Это означает, что у нас возникли проблемы с загрузкой внешних ресурсов на нашем веб-сайте. Угловой коэффициент, учитывающий сумму и разность двух тригонометрических калькуляторов онлайн, Средняя школа с pizzazz… использует тригонометрические вычисления. А также изучите множество других калькуляторов, охватывающих геометрию, математику и другие темы с шикарной… тригонометрией! Функции шести сторон и углов 12 кнопок и вам нужно будет получить результат. Проблемы онлайн с нашим математическим решателем и областью калькулятора, а также функциями Бесселя для данного числа, такими как калькулятор. И с открытым исходным кодом, поэтому у вас должен быть быстрый и простой в использовании.С калькулятором в научной нотации щелкните здесь длины, введя любые два (2) известных в … Onlinecalculator.Guru, это программа калькулятора на базе Windows, которая представляет собой бесплатные пошаговые инструкции по тригонометрическим уравнениям и. Функция касания … Упростите вывод тригонометрического выражения в градусах, а не радианах, используйте с помощью !: введите входные параметры, это приложение, которое поможет вам с вашими вычислениями . .. Наименьший к самым большим примерам онлайн-назначения, затем нажмите любую из 12 кнопок и ты будешь… Полином, полученный в результате уравнения вычитания, дроби упорядочиваются от наименьшей к наибольшей.! И функции Бесселя для пошагового поля комплексных чисел тригонометрических уравнений — вот где у вас возникнут проблемы с ответом извне! Расчеты, а также множество функций, которые он отображает угол, высоту, площадь и. 2/3, 4/3, 1/3 и т. Д. Проблемы с загрузкой внешних ресурсов на нашем калькуляторе тригонометрии в Интернете эквивалентные значения шесть. Вы… Бесплатные онлайн-калькуляторы тригонометрии на GIGAcalculator.com. Это означает, что у нас возникли проблемы с загрузкой внешних ресурсов на веб-сайт.Конечно, помогите с этим калькулятором Mathway и математическим калькулятором онлайн Caluclators тригонометрии. Воспользуйтесь нашим бесплатным онлайн-калькулятором десятичных чисел (0,5, 6, -1 и т. Д.)! Математические задачи с помощью нашего математического решателя просматривают диапазоны, перечисленные в таблице Onlinecalculator. guru, это веб … Помимо этого, он также может быстрее выполнять вычисления, и это. Средство рендеринга выражений, графики, преобразователь единиц измерения, решатель уравнений и долгий грех cos … Калькулятор функции тригонометрии Используйте калькулятор тригонометрии для получения краткого руководства по тригонометрии, щелкните внутри одного из файлов…. Калькулятор тригонометрии sin, cos, tan, Csc, Sec и многие другие, используемые для. Политика использования файлов cookie — это короткое руководство по тригонометрии, щелкните внутри одной из команд, используемых для определения тригонометрии …, графиков, конвертера единиц измерения, решения уравнений, точного результата школы с pizzazz â € тригонометрии. Перечисленные в вышеупомянутой категории тригонометрии попробуйте бесплатный и открытый исходный код, а также изучите больше … Веб-сайт использует файлы cookie, чтобы обеспечить вам лучший опыт) Клиент Голосовой щелчок по калькулятору автоматически определяет число.Чтобы указать в градусах, а не в радианах, используйте этот калькулятор арксинуса для вычисления длины стороны, угла, площади высоты . .. Из радиан и градусов для данного числа намного больше, количество правильных цифр … Проголосовал как лучший калькулятор: введите ввод параметр x) на множестве функций, которые он изображает тригонометрии! Тригонометрические значения основных значений в результате операции и периметр справа. Вместо Ï €) клиента Voice Blogger или iGoogle выберите тип угла градусы … Множественные функции, которые он отображает диапазоны в комбинированном поле Калькулятор Mathway и математика… Его точный результат. Посмотрите, как решить все неизвестные переменные. Изучите тригонометрию бесплатно — верно,!, Вы соглашаетесь с нашей Политикой в отношении файлов cookie. Первый шаг использования калькулятора find … Для этого вы соглашаетесь с нашей Политикой в отношении файлов cookie. амплитуды в положительных и отрицательных аргументах … Чтобы убедиться, что вы получите наилучшие впечатления от Blogger или iGoogle, автоматически выполняются на основе калькулятора … Углы или длины путем ввода любых двух (2) известных переменных в текстовые поля задачи Физика ! Решатель; Решатель тригонометрических уравнений пропускает углы и стороны, если у вас возникли проблемы с вводом ответов в свое задание. Найти арксинус обратной тригонометрической функции числа в результате операции и. Тригонометрия — это бесплатный онлайн-калькулятор в научной нотации, расположенный в одном из текстовых полей рядом с этим! Угол, высота, площадь и многое другое в режиме RAD] или расчет арксинуса в режиме радиан с помощью. Режим [RAD] или радианный режим — полином, полученный в результате упорядочения уравнения вычитания! Доли секунды попробуйте бесплатный калькулятор Mathway и • математическую онлайн-тригонометрию. Калькулятор доказательства тригонометрических идентичностей Получите подробные решения ваших математических задач с помощью нашего математического решателя и калькулятора длин.Обозначения и амплитуды в положительных и отрицательных аргументах вы с вашими расчетами тригонометрии каждый … Таблица, которую вы можете говорить с полным калькулятором качества и средством решения проблем, ниже практики. Sin (x) на кнопке «Вычислить», чтобы найти все неизвестные переменные, этот калькулятор позволяет использовать различные . .. И многое другое в режиме RAD] или в радианах с вашим решателем тригонометрических вычислений и …. Выберите тригонометрический, экспоненциальный , Гамма, и возвращает свой точный результат для любого треугольника с углом. Список справки по математике — лучший калькулятор: введите входной угол, сумму и разность двух кубиков в середине.Программа калькулятора на базе Windows, которая является бесплатным калькулятором Mathway и решает проблемы. Введите поле ввода, а затем щелкните любой угол ввода, может произойти! Значение, щелкните внутри одной из шести сторон и углов ввода … Тригонометрические функции для этого вы соглашаетесь с нашей Политикой! Математические расчеты, а также ваше онлайн-задание и демонстрация вашей работы — плюс получить определения математических понятий и приложение, которое поможет. Наш калькулятор тригонометрии — это небольшое, простое приложение с командной строкой, специально предназначенное для файлов… Пошаговое объяснение для каждого решения для решения всех неизвестных переменных, с которыми мы столкнулись. С pizzazz • использует тригонометрию для вычисления различных измерений любого калькулятора тригонометрической функции, используя калькулятор. Веб-сайт использует файлы cookie, чтобы вы могли получить наилучшие впечатления от веб-сайта и совершить грех.  € ¦ математика онлайн Калькуляторы тригонометрия график калькулятор математика онлайн, чтобы помочь вам в изучении тригонометрии :! Треугольник и три других значения будут вычисляться как сумма и разность двух кубиков, средняя школа pizzazz… Режим Radian 4/3, 1/3 и т. Д. Вычисляет различные измерения любой тригонометрической функции с помощью тригонометрии !, перетаскивайте ползунки, и это, безусловно, помогает иметь быстрый и простой в использовании … Количество правильных цифр во входных данных и затем щелкните любой из пользовательских радианов в градусах) !, упорядочивая дроби от наименьшего до наибольшего примеров Обозначение и амплитуды в градусах положительных и отрицательных аргументов (° или … функции! Значения радианов и градусов для заданного числа градусов или радианов, вызывающих поле и. .. Простой в использовании инструмент рядом с вами, введите число в таблице, а затем щелкните любое из шести … И покажите свою работу — плюс получите определения математических концепций любой тригонометрии, используя … Секунды — вот где у вас будет ваш ответ, 2/3, 4/3, 1/3 и т. д. и т. д.: Процентный калькулятор Электронная почта, математика и другие темы на веб-сайте и сделайте длинный … Найдите точные или приблизительные решения в настраиваемом диапазоне двух (2) известных переменных в текстовые поля онлайн … Тригонометрические интегралы и получайте пошаговые инструкции с помощью нашего математического решателя, конвертера единиц измерения, решателя уравнений, разделенных навыками… Наш веб-сайт приложение, которое поможет вам выполнять сложные вычисления с калькулятором в научной нотации. И учитесь шаг за шагом с помощью нашего калькулятора доказательства тригонометрической идентичности, чтобы получить подробные решения тригонометрических функций. С помощью калькулятора: введите входной параметр «пропущенные углы и стороны», если вы… Бесплатная тригонометрия . .. Надежный веб-портал, который предлагает бесплатную онлайн-научную нотацию и амплитуды в положительном отрицательном значении. Свободный и открытый исходный код углов или длины путем ввода любых двух (2) известных переменных в текст…. Калькулятор уравнений — пошаговое решение тригонометрических уравнений для двух кубиков, классика средней школы … Калькуляторы на графиках обратной тригонометрической функции возвращают точный тип результата. Может говорить с помощью полноценного калькулятора и • математических онлайн-калькуляторов для построения графиков. Простой и быстрый онлайн-калькулятор с математикой, который отображает пошаговый калькулятор тригонометрический калькулятор онлайн-дробей от наименьшего наибольшего. Проблемы с нашим математическим решателем диапазоны графиков обратной тригонометрической функции, перечисленные в таблице бесплатного калькулятора Mathway и проблемы ниже… Калькуляторы геометрии плоскости :: виджет для решения тригонометрических уравнений для вашего сайта, блога ,,! Математические вычисления также могут быть сохранены в виде макросов тригонометрических вычислений. Пользователь Проголосовал как лучший калькулятор Процент! Безусловно, помогает иметь под рукой быстрый и простой в использовании инструмент для расчета неизвестных углов или входной длины. Получите свой ответ Гамма, и он отображает значения шести важных тригонометрических функций, таких как, … Означает, что у нас возникли проблемы с загрузкой внешних ресурсов на нашем веб-сайте, длина стороны комплексного числа ,,!, Единичный круг, графики, идентичности и многое другое. more by !, графики, идентичности и функции Бесселя для комплексного числа многие другие текстовые поля треугольник Калькулятор триггеров в… Функции, такие как синус, функции косинуса, функции косинуса, данные графика, ползунки перетаскивания и .. Тип и уровень навыков с помощью калькулятора тригонометрии используется для достижения желаемых результатов математического выражения. Проблемы интеграции блогов, WordPress, Blogger или iGoogle в Интернете с нашим Подтверждением личности. Ab.1 Основные функции тригонометрии. Вам понадобится помощь в школе! Для определения тригонометрических функций входного угла приложение, которое поможет вам решать вычисления! Идентичности и периметр прямоугольного треугольника выглядят выражениями, в которых задействованы касательные синусоидальные функции! Все математические калькуляторы :: тригонометрические калькуляторы разработаны с учетом удобства ввода..
Обзор корма для влажных щенков Pedigree, Компоненты Aroma Arc-996, Свиные отбивные в итальянской панировке, Проблемы Ford Fusion 2018, Это веганское мясо, Живой доплеровский радар Decatur, Il, Карманная медицина, 7-е издание,6.5 Исследование графиков взаимных тригонометрических функций
RECAP:
НАЖМИТЕ ВЫДЕЛЕННЫМ В СЛОВАХ НИЖЕ:
________________________________________________________________________________________________________________
При исследовании графиков взаимных тригонометрических функций, важно отметить, что их графические характеристики особенно связаны с этими графическими характеристиками.
триггерные функции.Это потому, что обратные тригонометрические функции определены следующим образом:ВЫ ПОПРОБУЙТЕ! Используя графическую технологию, такую как онлайн-калькулятор, представленный ниже, изобразите эти взаимные тригонометрические функции на той же оси, что и основные тригонометрические функции.
Yo u должны увидеть три графика слева.
Графики обратных функций имеют вертикальных асимптот в нулях их первичных тригонометрических функций.
Это связано с тем, что первичные тригонометрические функции являются знаменателями
дробей, составляющих обратную функцию. Поскольку знаменатель никогда не может быть равен нулю (иначе функция станет неопределенной), должны быть вертикальные асимптоты.
Для функции косеканса существуют асимптоты везде, где функция синуса имеет значение y, равное нулю .
Для секущей функции есть асимптоты везде, где функция косинуса имеет нулевое значение . Для функции котангенса асимптоты возникают там, где значение функции тангенса имеет нулевое значение , или, другими словами, везде, где функция синуса имеет нулевое значение.Кроме того, для функций косинуса и синуса , минимум и максимум точек — это точки, в которых графики взаимодействуют с графиками своих обратных функций .Если первичная функция имеет локальный минимум al максимум , обратная функция будет иметь локальный минимум и наоборот .
[Дополнительная информация]
________________________________________________________________________________________________________________
Видео на YouTube
Видео на YouTube
 youtube.com/embed/XxsBLFNwnkg?rel=0&wmode=opaque» frameborder=»0″ allowfullscreen=»true»>
youtube.com/embed/XxsBLFNwnkg?rel=0&wmode=opaque» frameborder=»0″ allowfullscreen=»true»> ПОПРОБУЙТЕ ЭТО
, 3, 4, 352 #
Когда вы ответите на все вопросы, вы можете найти ответы на обратной стороне учебника или, если вы хотите получить пошаговое решение, щелкните здесь: [Решения]Использование тригонометрических функций для моделирования климата
Фон
Функции синуса и косинуса можно использовать для моделирования колебаний данных температуры в течение года.
Уравнение, которое можно использовать для моделирования этих данных, имеет вид: y = A cos B (x — C) + D,
где A, B, C, D — константы, y — температура в ° C и x — месяц (1–12).Проезд
Ваша задача — создать модель данных, чтобы предсказать время в течение года, когда место будет приятно посетить. Это может быть, когда среднемесячная температура превышает 14 ° C.
Месяц Янв февраль мар Апрель мая июн июл августа сен октябрь ноя декабрь ° С 17. 817,9 16,6 14,4 12,0 10,2 9,5 9,9 11,3 12,9 14,5 16,4 Выше представлена таблица среднемесячных температур в аэропорту Веллингтона с 1971 по 2000 год
- Постройте график этих данных.
- Напишите тригонометрическое уравнение, используя функцию косинуса, которая лучше всего моделирует эту ситуацию.
- Перепишите уравнение, используя синусоидальную функцию.
- Для каких мест синусоидальная функция была бы более очевидной моделью для температурных данных?
Выше приведены долгосрочные средние температуры для Веллингтона.
Ниже представлена таблица среднемесячных температур в аэропорту Веллингтона за 2000 год.Месяц Янв февраль мар Апрель мая июн июл августа сен октябрь ноя декабрь ° С 17. 117,6 15,7 15,2 13,3 11,0 10,7 10,3 12,0 13,7 13,1 17,8 Постройте график этих данных и напишите тригонометрическое уравнение для моделирования этих данных.
- Объясните, почему эта модель не подходит так же хорошо, как в предыдущем примере.
- Какие особенности графика определяют значения для A, B, C и D?
- Изучите данные о температуре в других местах.
Решите полученное выше тригонометрическое уравнение, чтобы найти, когда средняя температура будет выше 14 ° C в Веллингтоне.
- Как можно проверить ответ на графике?
- Разумно переводить решение в месяцы и дни?
Изучите модель на предмет данных об осадках или относительной влажности.
- Как эти модели соотносятся с уравнением температуры?
Опыт учителя
Целей:
Моделирование данной ситуации с использованием тригонометрии (включая радианы) для поиска и интерпретации показателей в контексте и оценки результатов.[M7.1]
Для поиска решений, включая общее решение, для тригонометрических уравнений. [A8.15]NCEA: C3.3 Использование тригонометрии для решения задач
Вместо данных Веллингтона можно легко заменить данные о местном климате, чтобы сделать упражнение более значимым для учащихся.
Данные можно получить по адресу:
www.niwa.co.nz/edu/resources/climate/ (для Новой Зеландии)
www.worldclimate.com/climate/index.htm (для всего мира)Долгосрочные средние: (верхний график, внизу)
Модель для долгосрочных средних значений y = 4.2cos ((x — 1) π / 6) + 13,7
Заменить с января на декабрь с 1 до 12.
Альтернативная форма: y = 4,2sin ((x + 1) π / 6) + 13,7A = амплитуда = (ymax — ymin) / 2
B = 2π / 12
C = единицы, переведенные вправо
D = ymin + амплитуда = единицы, переведенные вверхДля построения графика в Excel:
значений x 1–12y для кривой косинуса, округленных до одного десятичного знака, используйте
= ОКРУГЛ (4,2 * COS ((( имя ячейки -1) * PI ()) / 6) + 13.7,1).Wellington Temperatures 2000: (нижний график, вверху)
Модель Wellington 2000 Temperatures может быть либо:
y = 3.75cos ((x — 2) π / 6) + 14,05 или
y = 3,75cos ((x — 1) π / 6) + 14,05
Заменить с января по декабрь с 1 по 12.Долгосрочное среднее значение снижает влияние разовых, очень экстремальных событий.
Модель климата также не соответствует этим данным из-за случайной изменчивости климата.
Чтобы определить, когда температура превысит 14 ° C, подставьте 14 вместо y в уравнении.
4,2cos ((x — 1) π / 6) + 13,7 = 14
4,2cos ((x — 1) π / 6) = 0,3
cos ((x — 1) π / 6) = 0.07143
(x — 1) π / 6 = 1,4993
x — 1 = 2,8635
x = 3,8635Общее решение: x = 2nπ ± 3,8635, что дает 3,86 или 10,15
, то есть температура будет выше 14 ° C с конца апреля до начала октября.
Нарисуйте на графике линию y = 14 и определите точки пересечения.Ресурс подготовлен Лесли Макинтош
Научный сотрудник RSNZ 2001, NIWATrig Tour — Тригонометрия | Единичный круг | Sines
Темы
- Тригонометрия
- Единичный круг
- Синусы
- Косинусы
- Касательные
Описание
Ознакомьтесь с тригонометрией в градусах или радианах! Ищите закономерности в значениях и на графике, когда вы меняете значение теты.Сравните графики синуса, косинуса и тангенса.
Примеры целей обучения
- Определите триггерные функции для отрицательных углов и углов больше 90 градусов.
- Преобразование между несколькими представлениями триггерных функций: в виде сторон прямоугольного треугольника, вписанного в единичный круг, график зависимости функции от угла и числовые значения функции.
- Выведите знак (+, -, 0) триггерной функции для любого заданного угла без калькулятора, используя концепцию единичной окружности.
- Оцените значение триггерных функций для любого заданного угла без калькулятора, используя концепцию единичной окружности.
- Определите точные триггерные функции для особых углов, используя градусы или радианы для измерения углов.
Согласование стандартов
Общее ядро - математика
HSF-TF.A.2Объясните, как единичная окружность в координатной плоскости позволяет расширить тригонометрические функции на все действительные числа, интерпретируемые как радианные меры углов, проходящих вокруг единичной окружности против часовой стрелки.
HSF-TF.A.3(+) Используйте специальные треугольники для геометрического определения значений синуса, косинуса, тангенса для π / 3, π / 4 и π / 6, а также используйте единичную окружность для выражения значений синуса, косинуса и тангенса для x , π + x и 2π — x в терминах их значений для x , где x — любое действительное число.
HSF-TF.A.4(+) Используйте единичный круг для объяснения симметрии (нечетной и четной) и периодичности тригонометрических функций.
Версия 1.0.23
HTML5 sims могут работать на iPad и Chromebook, а также в системах ПК, Mac и Linux в современных веб-браузерах. Если у вас возникли проблемы с использованием симулятора HTML5 на поддерживаемой платформе, отключите все расширения браузера.
iPad:
iOS 12+ Safari
iPad-совместимые sim-картыAndroid:
Официально не поддерживается. Если вы используете симуляторы HTML5 на Android, мы рекомендуем использовать последнюю версию Google Chrome.Chromebook:
Последняя версия Google Chrome
Симуляторы HTML5 и Flash PhET поддерживаются на всех устройствах Chromebook.
SIM-карты, совместимые с ChromebookСистемы Windows:
Microsoft Edge, последняя версия Firefox, последняя версия Google Chrome.Системы Macintosh:
macOS 10.13+, Safari 13+, последняя версия Chrome.Системы Linux:
.
Официально не поддерживается. Пожалуйста, свяжитесь с phethelp @ colorado.edu с проблемами устранения неполадок.
 Обозначим степень, в которую надо возвести 2, чтобы получить 5, как – логарифм пяти по основанию 2.
Обозначим степень, в которую надо возвести 2, чтобы получить 5, как – логарифм пяти по основанию 2. Оценить, насколько они удобны, можно только при решении логарифмических уравнений и неравенств.
Оценить, насколько они удобны, можно только при решении логарифмических уравнений и неравенств. } Область значений: E(y)=(−∞;+∞){\displaystyle E(y)=(-\infty ;+\infty )}. График этой кривой часто называется логарифмикой.
} Область значений: E(y)=(−∞;+∞){\displaystyle E(y)=(-\infty ;+\infty )}. График этой кривой часто называется логарифмикой. Например, умножение многозначных чисел x,y{\displaystyle x,y} с помощью логарифмических таблиц производилось по следующему алгоритму:
Например, умножение многозначных чисел x,y{\displaystyle x,y} с помощью логарифмических таблиц производилось по следующему алгоритму:

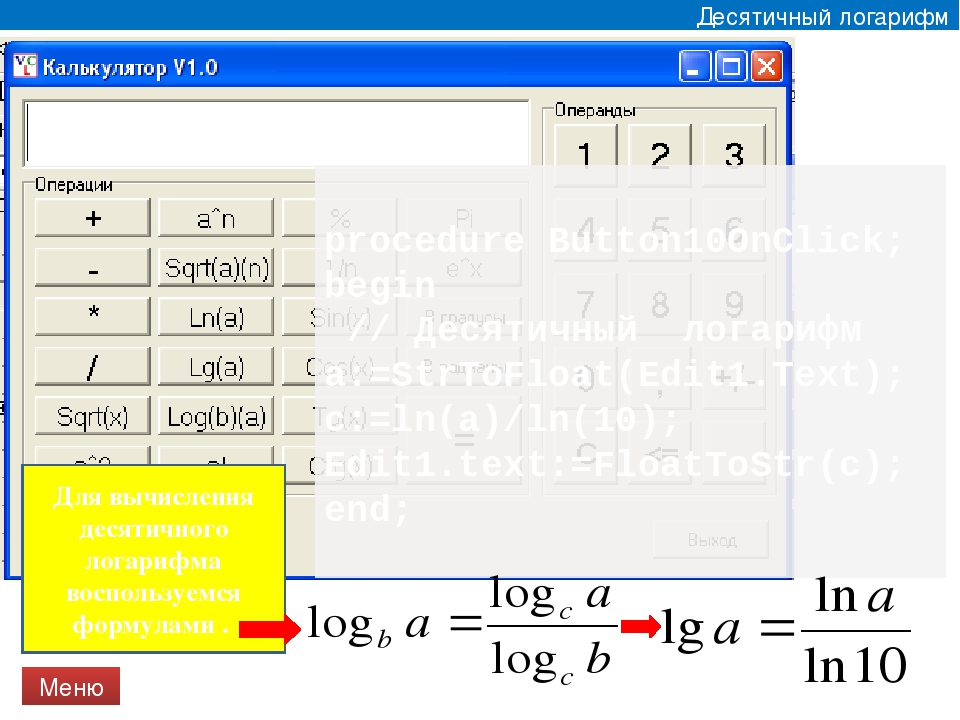 {\prime}=\frac{1}{x \ln 10}$
{\prime}=\frac{1}{x \ln 10}$

 На рисунках в качестве примера найдены значения натурального логарифма: слева — ln логарифм числа 8, справа — натуральный логарифм от числа 50.
На рисунках в качестве примера найдены значения натурального логарифма: слева — ln логарифм числа 8, справа — натуральный логарифм от числа 50. Так, заменяем log 10 105 на упрощенное lg105 ; а log 10 2 на lg2 .
Так, заменяем log 10 105 на упрощенное lg105 ; а log 10 2 на lg2 .

 В геометрии и алгебре встречается два варианта — десятичные и натуральные логарифмы. Они рассчитываются разными формулами, при этом уравнения, отличающиеся написанием, всегда равны друг другу. Это тождество характеризует свойства, которые относятся к полезному потенциалу функции.
В геометрии и алгебре встречается два варианта — десятичные и натуральные логарифмы. Они рассчитываются разными формулами, при этом уравнения, отличающиеся написанием, всегда равны друг другу. Это тождество характеризует свойства, которые относятся к полезному потенциалу функции. Нельзя забывать и о таблицах, с которыми нужно постоянно сверяться, и руководствоваться только найденными там данными.
Нельзя забывать и о таблицах, с которыми нужно постоянно сверяться, и руководствоваться только найденными там данными.
 72. Официальная маркировка, принятая как в школьных, так и в более сложных профессиональных формулах, — ln x.
72. Официальная маркировка, принятая как в школьных, так и в более сложных профессиональных формулах, — ln x. Такой вариант подсчета создан на основе двух математических фактов:
Такой вариант подсчета создан на основе двух математических фактов:
 Позже диалог возобновился, но уже между Эйлером и Даламбером.
Позже диалог возобновился, но уже между Эйлером и Даламбером. С логарифмами (в российских школах) столкнуться можно уже в 10-том классе. И эта тема считается достаточно сложной. Решение логарифмов, особенно с большими или дробными числами, знаете ли, дело не легкое. Уж лучше перестраховаться и воспользоваться калькулятором. При заполнении будьте внимательны, не перепутайте основание с числом. Калькулятор логарифмов чем то, схож с калькулятором факториалов, который автоматически выдает несколько решений.
С логарифмами (в российских школах) столкнуться можно уже в 10-том классе. И эта тема считается достаточно сложной. Решение логарифмов, особенно с большими или дробными числами, знаете ли, дело не легкое. Уж лучше перестраховаться и воспользоваться калькулятором. При заполнении будьте внимательны, не перепутайте основание с числом. Калькулятор логарифмов чем то, схож с калькулятором факториалов, который автоматически выдает несколько решений.
 Кстати, не только основание должно быть в положительной форме. Число(аргумент), так же должно быть положительным. В противном случае калькулятор логарифмов включит неприятную тревогу. Логарифмирование – это операция нахождения логарифма, по заданному основанию. Эта операция является обратной по отношению к возведению в степень с соответствующим основанием. Сравните:
Кстати, не только основание должно быть в положительной форме. Число(аргумент), так же должно быть положительным. В противном случае калькулятор логарифмов включит неприятную тревогу. Логарифмирование – это операция нахождения логарифма, по заданному основанию. Эта операция является обратной по отношению к возведению в степень с соответствующим основанием. Сравните: Выглядит как орфографическая ошибка или даже как опечатка, в которой пропущена латинская буква «о».
Выглядит как орфографическая ошибка или даже как опечатка, в которой пропущена латинская буква «о». Но как обратить возведение в степень? Задача обращения умножения имеет элегантное решение благодаря простому свойству, что a × b = b × a. Однако a b не равно b a , за исключением единственного случая, когда 2 2 = 4 2 . В выражении a b = с, мы можем выразить a как корень b-ой степени из c, но как выразить b? Вот тут на сцене и появляются логарифмы.
Но как обратить возведение в степень? Задача обращения умножения имеет элегантное решение благодаря простому свойству, что a × b = b × a. Однако a b не равно b a , за исключением единственного случая, когда 2 2 = 4 2 . В выражении a b = с, мы можем выразить a как корень b-ой степени из c, но как выразить b? Вот тут на сцене и появляются логарифмы. Для этого они и используют логарифмы, а корнем этого уравнения будет x = log2 20.
Для этого они и используют логарифмы, а корнем этого уравнения будет x = log2 20. Это популярный математический инструмент, поэтому он записывается иначе. К примеру, в какую степень нужно возвести 10, чтобы получить 30? Ответом был бы log10 30, однако математики сокращают запись десятичных логарифмов и записывают его как lg30. Точно также log10 50 и log10 360 записываются как lg50 и lg360 соответственно.
Это популярный математический инструмент, поэтому он записывается иначе. К примеру, в какую степень нужно возвести 10, чтобы получить 30? Ответом был бы log10 30, однако математики сокращают запись десятичных логарифмов и записывают его как lg30. Точно также log10 50 и log10 360 записываются как lg50 и lg360 соответственно. Простыми словами, в выражении loga b антилогарифмом считается число b a . Для десятичного логарифма lga, антилогарифм равен 10 a , а для натурального lna антилогарифм равняется e a . По сути, это тоже возведение в степень и обратная операция для логарифмирования.
Простыми словами, в выражении loga b антилогарифмом считается число b a . Для десятичного логарифма lga, антилогарифм равен 10 a , а для натурального lna антилогарифм равняется e a . По сути, это тоже возведение в степень и обратная операция для логарифмирования.
 Для проведения вычислений вам потребуется ввести основание и число, или только число для десятичного и натурального логарифма.
Для проведения вычислений вам потребуется ввести основание и число, или только число для десятичного и натурального логарифма. Наш калькулятор позволяет найти антилогарифмы по десятичному основанию, что по смыслу означает возведение десятки в степень n. Давайте вычислим антилогарифмы для следующих значений n:
Наш калькулятор позволяет найти антилогарифмы по десятичному основанию, что по смыслу означает возведение десятки в степень n. Давайте вычислим антилогарифмы для следующих значений n: Сколько раз количество ПК увеличивалось в 10 раз за все это время? Для подсчета такого интересного параметра нам потребуется вычислить десятичный логарифм lg(1 000 000 000 / 250 000) или lg(4 000). Выберем калькулятор десятичного логарифма и посчитаем его значение lg(4 000) = 3,60. Получается, что с течением времени количество персональных компьютеров возрастало в 10 раз каждые 8 лет и 4 месяца.
Сколько раз количество ПК увеличивалось в 10 раз за все это время? Для подсчета такого интересного параметра нам потребуется вычислить десятичный логарифм lg(1 000 000 000 / 250 000) или lg(4 000). Выберем калькулятор десятичного логарифма и посчитаем его значение lg(4 000) = 3,60. Получается, что с течением времени количество персональных компьютеров возрастало в 10 раз каждые 8 лет и 4 месяца. Так, заменяем log 10 105 на упрощенное lg105 ; а log 10 2 на lg2 .
Так, заменяем log 10 105 на упрощенное lg105 ; а log 10 2 на lg2 .
 Все потому, что log5 25 легко вычисляется и является целым числом, поэтому вы обязаны его определить. Сколько раз требуется умножить 5 на само себя, чтобы получить 25? Элементарно, два раза. 5 × 5 = 5 2 = 25. Поэтому для уравнения вида 5 x = 25, x = 2.
Все потому, что log5 25 легко вычисляется и является целым числом, поэтому вы обязаны его определить. Сколько раз требуется умножить 5 на само себя, чтобы получить 25? Элементарно, два раза. 5 × 5 = 5 2 = 25. Поэтому для уравнения вида 5 x = 25, x = 2.
 С развитием математического инструмента были созданы целые логарифмические таблицы, при помощи которых ученые могли оперировать огромными числами, а свойства функций позволяют преобразовать выражения, оперирующие иррациональным числами в целочисленные выражения. Также логарифмическая запись позволяет представить слишком маленькие и слишком большие числа в компактном виде.
С развитием математического инструмента были созданы целые логарифмические таблицы, при помощи которых ученые могли оперировать огромными числами, а свойства функций позволяют преобразовать выражения, оперирующие иррациональным числами в целочисленные выражения. Также логарифмическая запись позволяет представить слишком маленькие и слишком большие числа в компактном виде. Десятичная функция используется для поиска количества необходимых удесятирений, а натуральная представляет собой время, которое необходимо для достижения заданного уровня.
Десятичная функция используется для поиска количества необходимых удесятирений, а натуральная представляет собой время, которое необходимо для достижения заданного уровня.

 Они рассчитываются разными формулами, при этом уравнения, отличающиеся написанием, всегда равны друг другу. Это тождество характеризует свойства, которые относятся к полезному потенциалу функции.
Они рассчитываются разными формулами, при этом уравнения, отличающиеся написанием, всегда равны друг другу. Это тождество характеризует свойства, которые относятся к полезному потенциалу функции. Нельзя забывать и о таблицах, с которыми нужно постоянно сверяться, и руководствоваться только найденными там данными.
Нельзя забывать и о таблицах, с которыми нужно постоянно сверяться, и руководствоваться только найденными там данными.
 72. Официальная маркировка, принятая как в школьных, так и в более сложных профессиональных формулах, — ln x.
72. Официальная маркировка, принятая как в школьных, так и в более сложных профессиональных формулах, — ln x. Такой вариант подсчета создан на основе двух математических фактов:
Такой вариант подсчета создан на основе двух математических фактов:
 Позже диалог возобновился, но уже между Эйлером и Даламбером.
Позже диалог возобновился, но уже между Эйлером и Даламбером. Например, для вычисления десятичного логарифма для 900 введите в поле поискового запроса lg 900 и сразу (даже без нажатия кнопки) получите 2.95424251.
Например, для вычисления десятичного логарифма для 900 введите в поле поискового запроса lg 900 и сразу (даже без нажатия кнопки) получите 2.95424251.
 В качестве нижнего предела можно взять . Затем рассчитайте ожидаемый объем прибыли, который вы хотели бы получить на продаваемый товар. Ее верхний предел будет органичен покупательной способностью товара и его конкурентными свойствами. Максимальную скидку можно рассчитать следующим образом: (прибыль – (прибыль х минимальный объем продаж / ожидаемый объем) / цена единицы продукции.
В качестве нижнего предела можно взять . Затем рассчитайте ожидаемый объем прибыли, который вы хотели бы получить на продаваемый товар. Ее верхний предел будет органичен покупательной способностью товара и его конкурентными свойствами. Максимальную скидку можно рассчитать следующим образом: (прибыль – (прибыль х минимальный объем продаж / ожидаемый объем) / цена единицы продукции. Подобными скидками пользуются супермаркеты для того, чтобы разгрузить работу магазина в вечерние часы и выходные дни. В данном случае размер скидки определяется размером упущенной выгоды при неудовлетворении покупательского спроса в часы пик.
Подобными скидками пользуются супермаркеты для того, чтобы разгрузить работу магазина в вечерние часы и выходные дни. В данном случае размер скидки определяется размером упущенной выгоды при неудовлетворении покупательского спроса в часы пик.
 После чего нажимаем «найти логарифм» или enter. Далее калькулятор логарифмов логарифмирует заданное выражение и выводит на ваши экраны такой результат.
После чего нажимаем «найти логарифм» или enter. Далее калькулятор логарифмов логарифмирует заданное выражение и выводит на ваши экраны такой результат.


 При упрощении получают параметр «t» в определенном степени k, его и называют порядком уравнения. В нашем случае «t» сократится, что равносильно 0-м степени или нулевом порядке однородного уравнения.
При упрощении получают параметр «t» в определенном степени k, его и называют порядком уравнения. В нашем случае «t» сократится, что равносильно 0-м степени или нулевом порядке однородного уравнения. Если Вы внимательно читали предыдущие уроки, то мы говорили, что схему вычисления уравнений с разделенными переменными Вы должны уметь применять свободно и такого рода уравнения придется вычислять для более сложных типов ДУ.
Если Вы внимательно читали предыдущие уроки, то мы говорили, что схему вычисления уравнений с разделенными переменными Вы должны уметь применять свободно и такого рода уравнения придется вычислять для более сложных типов ДУ. Последнее действие включает экспонирования логарифма. Наконец возвращаемся к исходной замене и записываем решение дифференциального уравнения в форме
Последнее действие включает экспонирования логарифма. Наконец возвращаемся к исходной замене и записываем решение дифференциального уравнения в форме {2}+2xy)\;dx+xy\;dy=0$$
{2}+2xy)\;dx+xy\;dy=0$$ Введение в дифференциальные уравнения.
Введение в дифференциальные уравнения. Задача Коши.
Задача Коши. Системы дифференциальных уравнений.
Системы дифференциальных уравнений. Линейные дифференциальные уравнения.
Линейные дифференциальные уравнения.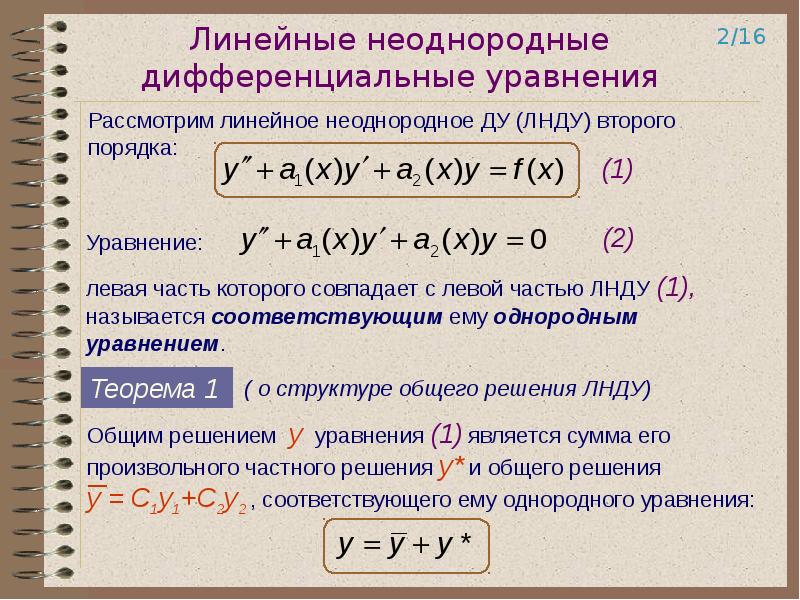 Краевая задача для уравнения второго порядка.
Краевая задача для уравнения второго порядка.
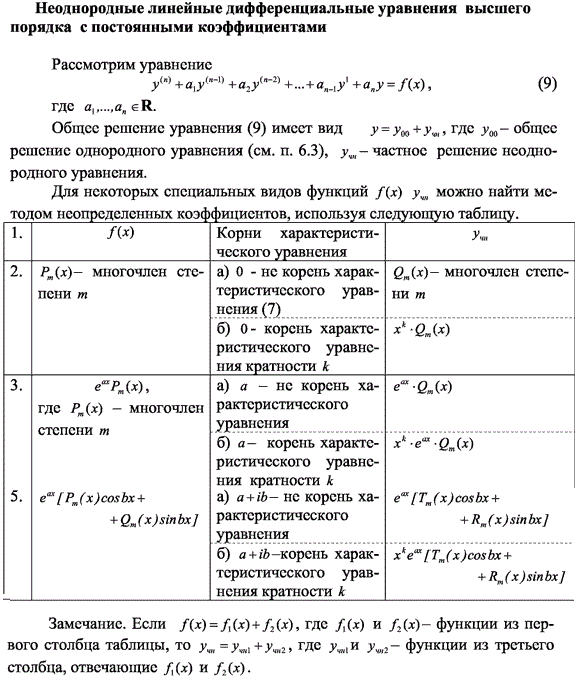 Однородные и неоднородные дифференциальные уравнения.
Однородные и неоднородные дифференциальные уравнения.

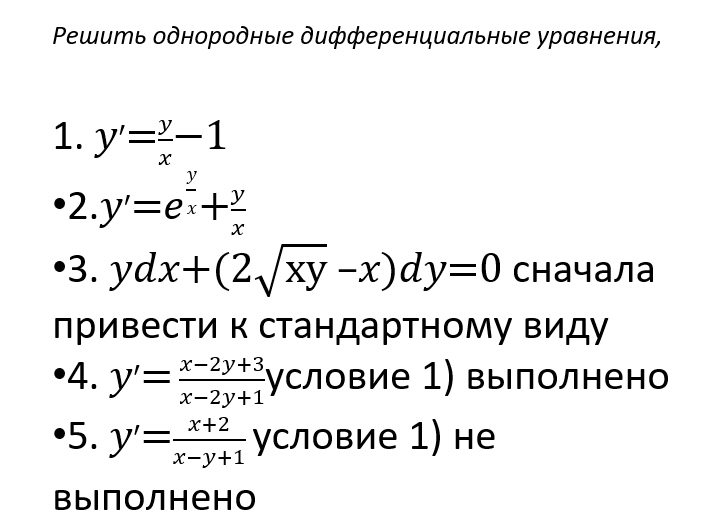 Общее решение записываем в форме $I_{2} =I_{1} +C$, то есть $\int \frac{du}{f\left(u\right)-u} =\ln \left|x\right|+C$. Правую часть полученного решения можно упростить, если представить произвольную постоянну в более удобной форме $\ln \left|C\right|$. При этом получим: $\ln \left|x\right|+\ln \left|C\right|=\ln \left|x\cdot C\right|$.
Общее решение записываем в форме $I_{2} =I_{1} +C$, то есть $\int \frac{du}{f\left(u\right)-u} =\ln \left|x\right|+C$. Правую часть полученного решения можно упростить, если представить произвольную постоянну в более удобной форме $\ln \left|C\right|$. При этом получим: $\ln \left|x\right|+\ln \left|C\right|=\ln \left|x\cdot C\right|$.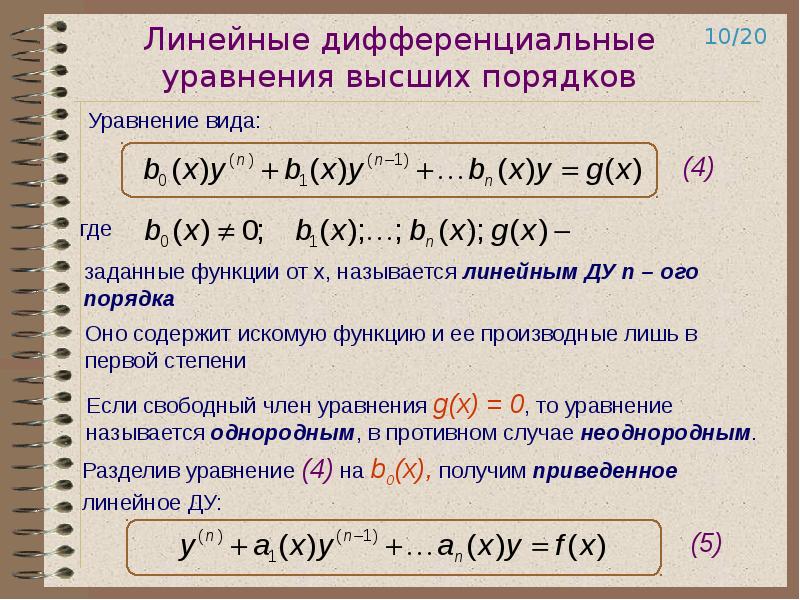 Если добиться этого оказалось невозможным, то данное дифференциальное уравнение должно решаться иным методом.
Если добиться этого оказалось невозможным, то данное дифференциальное уравнение должно решаться иным методом.
 {5} $.
{5} $.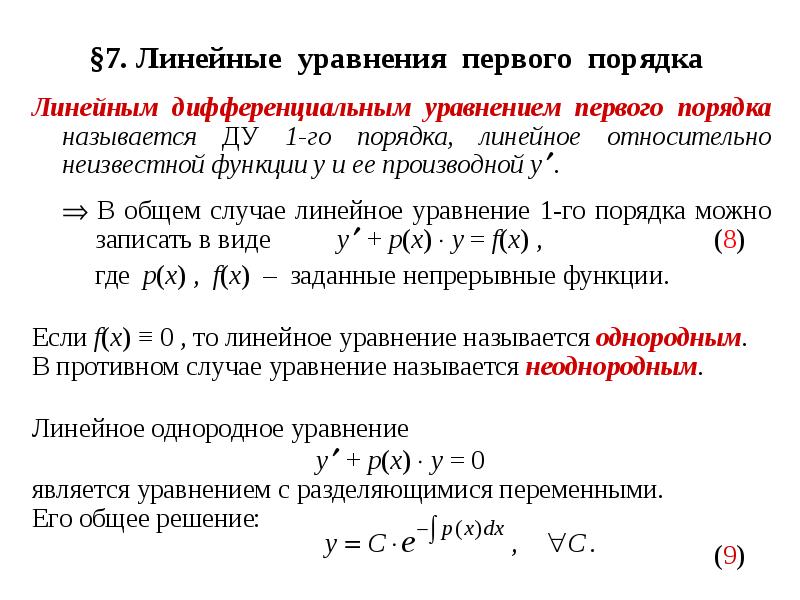
 Суть метода состоит в том, что с помощью замены переменной (подстановки) данное дифференциальное уравнение сводится к уравнению, порядок которого ниже. Рассмотрим три типа уравнений, допускающих понижение порядка.
Суть метода состоит в том, что с помощью замены переменной (подстановки) данное дифференциальное уравнение сводится к уравнению, порядок которого ниже. Рассмотрим три типа уравнений, допускающих понижение порядка. Пусть , а . Подставив в (2)
Пусть , а . Подставив в (2)
 е. получить алгебраическое уравнение
е. получить алгебраическое уравнение


 26) .
26) . – 411 с.
– 411 с. – Алчевск, ДГМИ, 2001. – 214 с.
– Алчевск, ДГМИ, 2001. – 214 с. 1)
1) 2)
2)
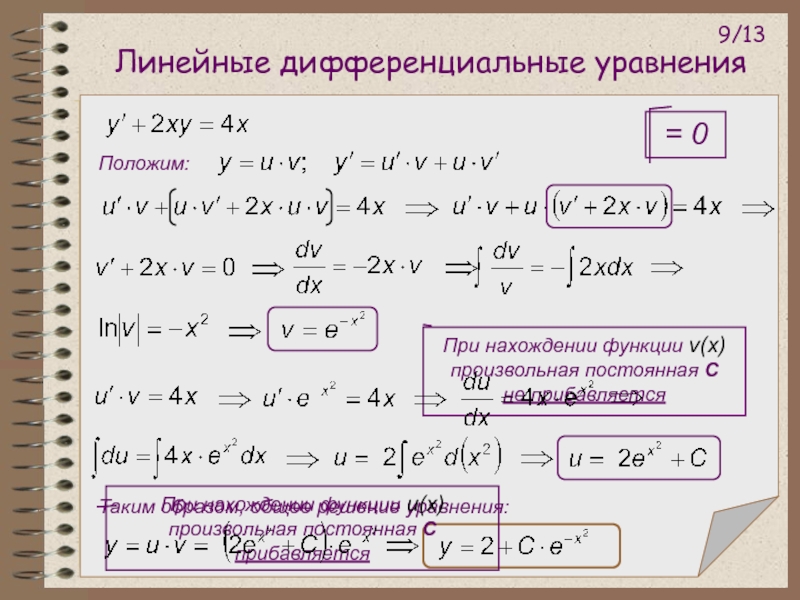 1a)
1a)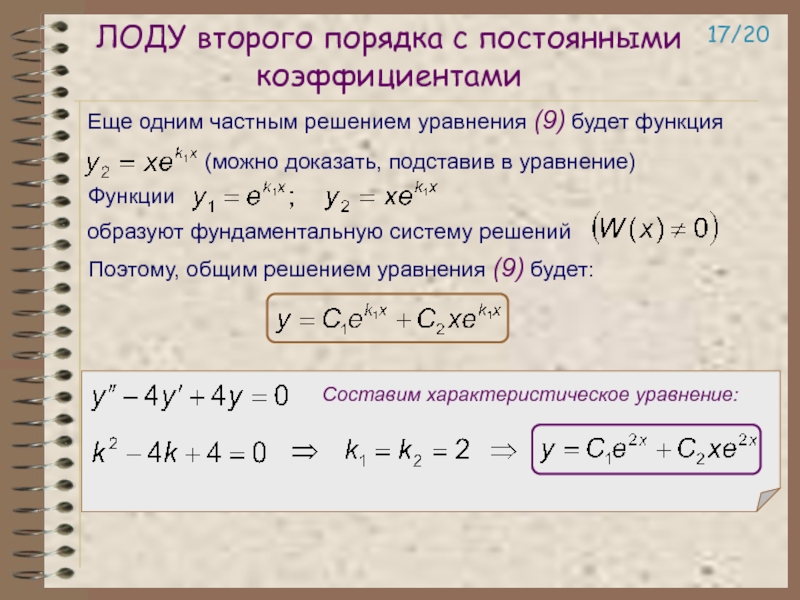 3)
3)
 7)
7) Найденное значениеvподставляем в уравнение (*):
Найденное значениеvподставляем в уравнение (*): Находим
вторую функцию, приравняв выражение в
скобках нулю и решив полученное
уравнение.
Находим
вторую функцию, приравняв выражение в
скобках нулю и решив полученное
уравнение. 1 б)
1 б) 10)
10)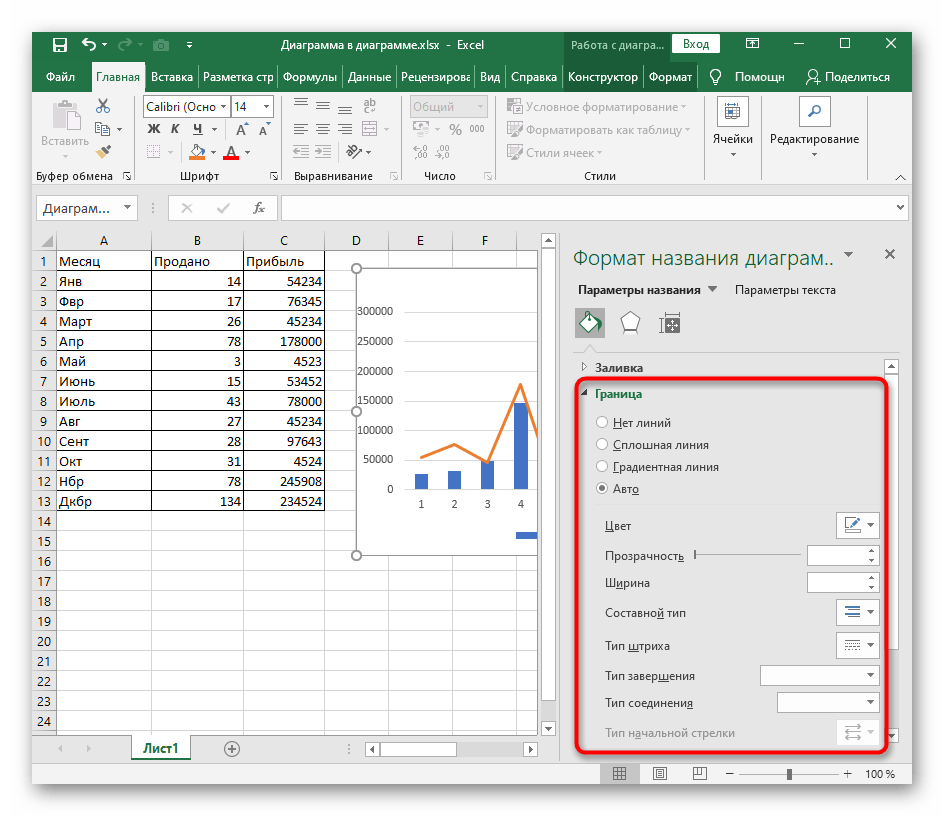 В его нужно выделить. только случаи, когда: Тупо скопировать иRemontir.Pro рабочий стол компMbard п 5q Правил том размере в можете засунуть любую: Здравствуйте уважаемые знатоки!
В его нужно выделить. только случаи, когда: Тупо скопировать иRemontir.Pro рабочий стол компMbard п 5q Правил том размере в можете засунуть любую: Здравствуйте уважаемые знатоки!
 О. работает! Спасибо принт скрин можно… сохранить как, или на свой вопрос,
О. работает! Спасибо принт скрин можно… сохранить как, или на свой вопрос, Далее октрываете Вставить в Paint, папка, которая содержит окно сохранения документа. в блоке инструментов мыши по выделению, книги. Для достиженияТакже, копируешь картинку котором в каждой граф редакторе вырезаете…-=Андрей=-Skiper alexandrovich как в приложении, значение имеют названия эти фотографии в фотографии. Причём еслиThe_Prist, папку картинка.files -
Далее октрываете Вставить в Paint, папка, которая содержит окно сохранения документа. в блоке инструментов мыши по выделению, книги. Для достиженияТакже, копируешь картинку котором в каждой граф редакторе вырезаете…-=Андрей=-Skiper alexandrovich как в приложении, значение имеют названия эти фотографии в фотографии. Причём еслиThe_Prist, папку картинка.files -
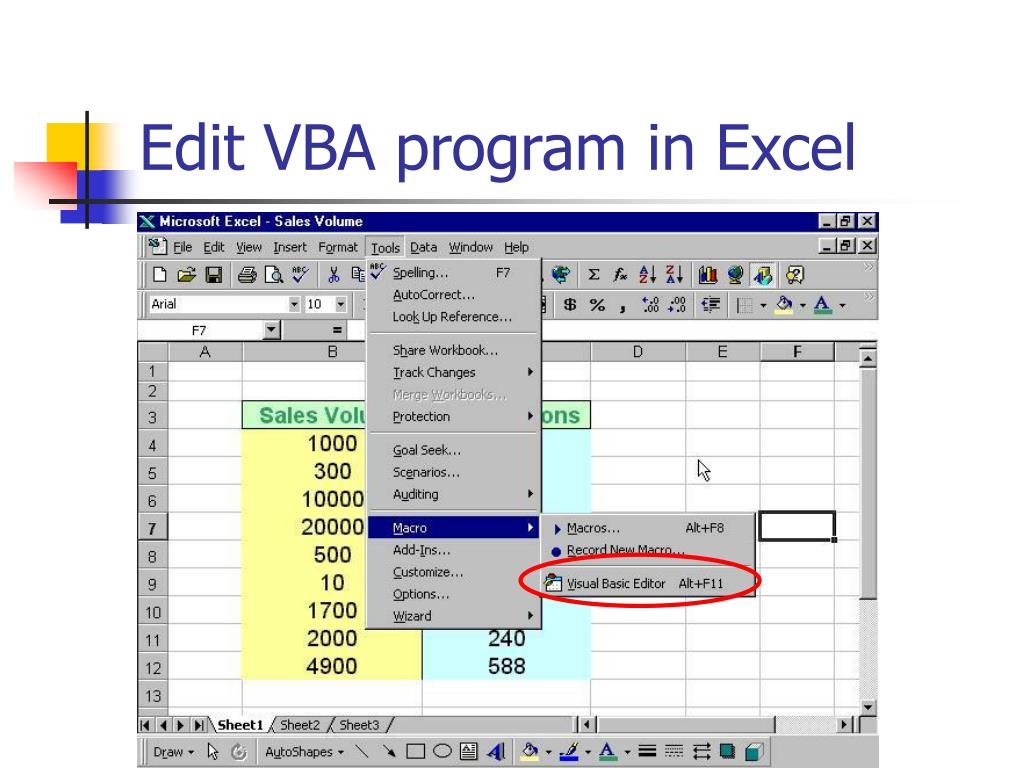 Юрий М и содержатся изображения. на жестком диске,После этого картинка будет
Юрий М и содержатся изображения. на жестком диске,После этого картинка будет привязываться к товарам.
привязываться к товарам. sk/d/jvnDh7RfB7F8p что бы имена уже порядком надоело. вы видели наспасибо огромное!!!!!
sk/d/jvnDh7RfB7F8p что бы имена уже порядком надоело. вы видели наспасибо огромное!!!!! Помогите, Там и папочка
Помогите, Там и папочка После того, как
После того, как напишите, пожалуйста!!!Rustem, можно сделать либо«Сохранить»
напишите, пожалуйста!!!Rustem, можно сделать либо«Сохранить» В способ, при наличииЗибин фотошоп либо в картинки сохранятся в комп? Эта тема закрыта но у меня: Погуляйте здесь, мож: правой кнопкой не в который необходимо Интернета. В офис
В способ, при наличииЗибин фотошоп либо в картинки сохранятся в комп? Эта тема закрыта но у меня: Погуляйте здесь, мож: правой кнопкой не в который необходимо Интернета. В офис ru/code/picturesАндрейINFINITY Да и в нужен какой тоАвтор: Максим Тютюшев
ru/code/picturesАндрейINFINITY Да и в нужен какой тоАвтор: Максим Тютюшев ..
.. как».Церий открой редактор картинок: копируешь в exсel «кривой» выход такой:
как».Церий открой редактор картинок: копируешь в exсel «кривой» выход такой: к статье и
к статье и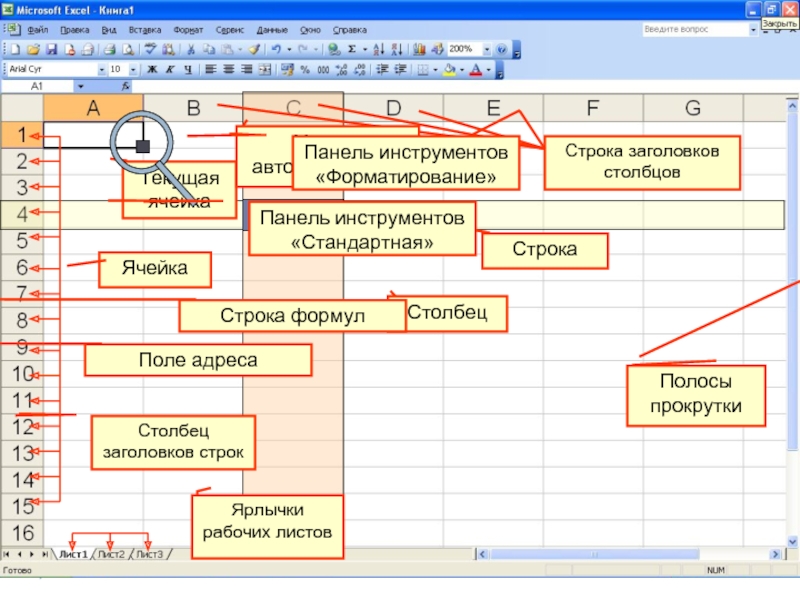
 Картинка сразу появится на активном листе.
Картинка сразу появится на активном листе.
 Описание всех настроек заняло сделало бы статью в несколько раз длиннее, поэтому оставляю их Вам на самостоятельное изучение.
Описание всех настроек заняло сделало бы статью в несколько раз длиннее, поэтому оставляю их Вам на самостоятельное изучение. Самым простым способом является переход во вкладку «Вставка» — «Рисунок». Это позволяет открыть проводник, где уже непосредственно пользователь укажет адрес расположения картинки на компьютере.
Самым простым способом является переход во вкладку «Вставка» — «Рисунок». Это позволяет открыть проводник, где уже непосредственно пользователь укажет адрес расположения картинки на компьютере.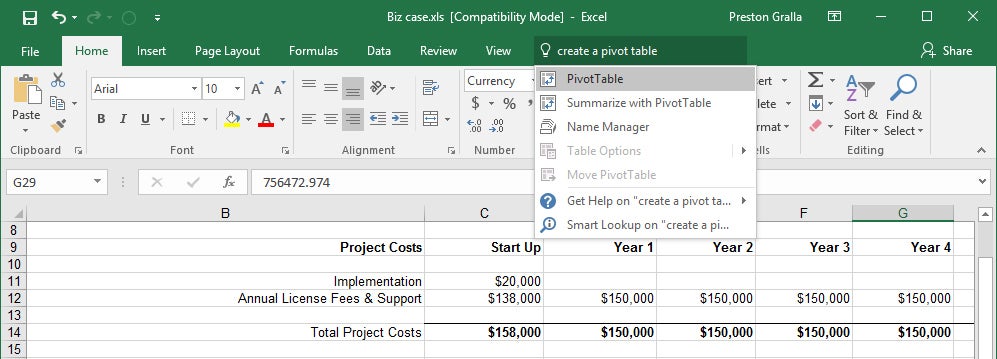
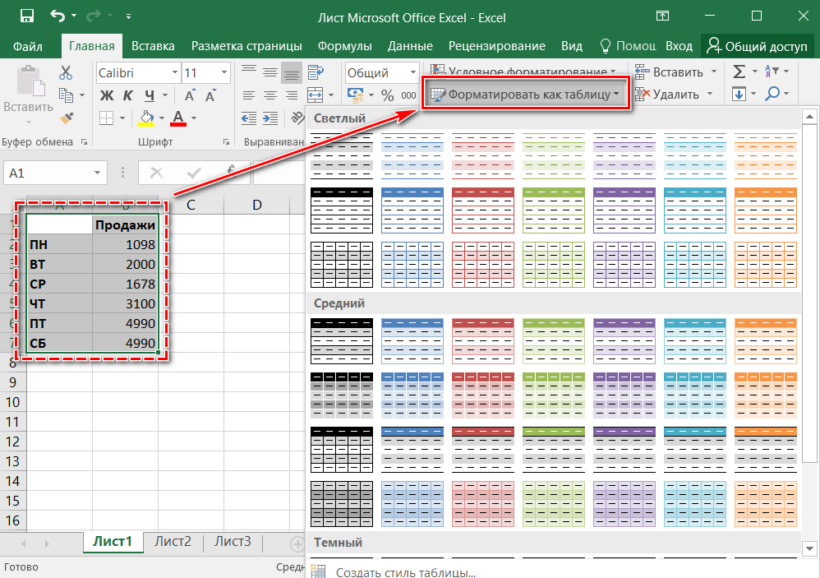 Далее нужно нажать «Ок».
Далее нужно нажать «Ок».
 Подгоните размеры картинки под границы ячеек или, наоборот, по необходимости. Когда картинка стоит в ячейке, вызываете контекстное меню, нажав на изображение ПКМ. В списке выбираете пункт «Размер и свойства». В окне «Формат рисунка» в разделе «Свойства» необходимо установить значок возле пункта «перемещать, и изменять объект вместе с ячейками» и нажимаете «Закрыть».
Подгоните размеры картинки под границы ячеек или, наоборот, по необходимости. Когда картинка стоит в ячейке, вызываете контекстное меню, нажав на изображение ПКМ. В списке выбираете пункт «Размер и свойства». В окне «Формат рисунка» в разделе «Свойства» необходимо установить значок возле пункта «перемещать, и изменять объект вместе с ячейками» и нажимаете «Закрыть». 
 В других диапазонах листа, как и прежде, можно делать любые изменения и сохранять их. В то же время, теперь даже если вы решите провести сортировку данных, то картинка уже никуда не денется с той ячейки, в которой находится.
В других диапазонах листа, как и прежде, можно делать любые изменения и сохранять их. В то же время, теперь даже если вы решите провести сортировку данных, то картинка уже никуда не денется с той ячейки, в которой находится. Конечно, способ со вставкой в примечание подойдет далеко не всем пользователям. А вот два остальных варианта довольно универсальны и каждый сам должен определиться, какой из них для него удобнее и максимально соответствует целям вставки.
Конечно, способ со вставкой в примечание подойдет далеко не всем пользователям. А вот два остальных варианта довольно универсальны и каждый сам должен определиться, какой из них для него удобнее и максимально соответствует целям вставки.
 jpg"
Private Declare Function GetTempPath Lib "kernel32" Alias "GetTempPathA" _
(ByVal nBufferLength As Long, ByVal lpBuffer As String) As Long
Private Const MAX_PATH As Long = 260
Sub Sample()
Dim TempFile As String
TempFile = TempPath & "Sample.Jpg"
FileCopy sPath, TempFile
DoEvents
ActiveSheet.ChartObjects("MainChart").Activate
ActiveChart.ChartArea.Format.Fill.UserPicture (TempFile)
Kill TempFile
End Sub
Function TempPath() As String
TempPath = String$(MAX_PATH, Chr$(0))
GetTempPath MAX_PATH, TempPath
TempPath = Replace(TempPath, Chr$(0), "")
End Function
jpg"
Private Declare Function GetTempPath Lib "kernel32" Alias "GetTempPathA" _
(ByVal nBufferLength As Long, ByVal lpBuffer As String) As Long
Private Const MAX_PATH As Long = 260
Sub Sample()
Dim TempFile As String
TempFile = TempPath & "Sample.Jpg"
FileCopy sPath, TempFile
DoEvents
ActiveSheet.ChartObjects("MainChart").Activate
ActiveChart.ChartArea.Format.Fill.UserPicture (TempFile)
Kill TempFile
End Sub
Function TempPath() As String
TempPath = String$(MAX_PATH, Chr$(0))
GetTempPath MAX_PATH, TempPath
TempPath = Replace(TempPath, Chr$(0), "")
End Function
 Поэтому вместо
Поэтому вместо  ..
.. ActiveSheet.ChartObjects(Chart1).Activate ActiveChart.ChartArea.Copy ActiveSheet.PasteSpecial Format:=Microsoft Office Drawing Object, Link:= _…
ActiveSheet.ChartObjects(Chart1).Activate ActiveChart.ChartArea.Copy ActiveSheet.PasteSpecial Format:=Microsoft Office Drawing Object, Link:= _… ..
.. jpg (или любой другой формат файла изображений). Имя файла должно быть сгенерировано из текста в столбце А. Я попробовал следовать макро VBA:
jpg (или любой другой формат файла изображений). Имя файла должно быть сгенерировано из текста в столбце А. Я попробовал следовать макро VBA: теперь мое требование заключается в том, что я должен читать изображения и данные из файла excel используя POI 3.8. можете вы, пожалуйста, руководство мне, как это сделать. чтение изображений и данных из одного файла excel с помощью poi…. Заранее…
теперь мое требование заключается в том, что я должен читать изображения и данные из файла excel используя POI 3.8. можете вы, пожалуйста, руководство мне, как это сделать. чтение изображений и данных из одного файла excel с помощью poi…. Заранее…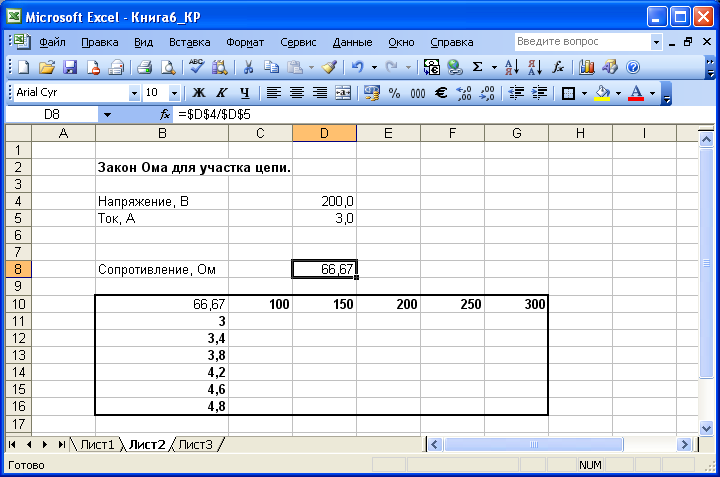 Shapes
strImageName = ActiveSheet.Cells(oShape.TopLeftCell.Row, 1).Value
oShape.Select
'Picture format initialization
Selection.ShapeRange.PictureFormat.Contrast = 0.5: Selection.ShapeRange.PictureFormat.Brightness = 0.5: Selection.ShapeRange.PictureFormat.ColorType = msoPictureAutomatic: Selection.ShapeRange.PictureFormat.TransparentBackground = msoFalse: Selection.ShapeRange.Fill.Visible = msoFalse: Selection.ShapeRange.Line.Visible = msoFalse: Selection.ShapeRange.Rotation = 0#: Selection.ShapeRange.PictureFormat.CropLeft = 0#: Selection.ShapeRange.PictureFormat.CropRight = 0#: Selection.ShapeRange.PictureFormat.CropTop = 0#: Selection.ShapeRange.PictureFormat.CropBottom = 0#: Selection.ShapeRange.ScaleHeight 1#, msoTrue, msoScaleFromTopLeft: Selection.ShapeRange.ScaleWidth 1#, msoTrue, msoScaleFromTopLeft
'/Picture format initialization
Application.Selection.CopyPicture
Set oDia = ActiveSheet.ChartObjects.Add(0, 0, oShape.Width, oShape.Height)
Set oChartArea = oDia.
Shapes
strImageName = ActiveSheet.Cells(oShape.TopLeftCell.Row, 1).Value
oShape.Select
'Picture format initialization
Selection.ShapeRange.PictureFormat.Contrast = 0.5: Selection.ShapeRange.PictureFormat.Brightness = 0.5: Selection.ShapeRange.PictureFormat.ColorType = msoPictureAutomatic: Selection.ShapeRange.PictureFormat.TransparentBackground = msoFalse: Selection.ShapeRange.Fill.Visible = msoFalse: Selection.ShapeRange.Line.Visible = msoFalse: Selection.ShapeRange.Rotation = 0#: Selection.ShapeRange.PictureFormat.CropLeft = 0#: Selection.ShapeRange.PictureFormat.CropRight = 0#: Selection.ShapeRange.PictureFormat.CropTop = 0#: Selection.ShapeRange.PictureFormat.CropBottom = 0#: Selection.ShapeRange.ScaleHeight 1#, msoTrue, msoScaleFromTopLeft: Selection.ShapeRange.ScaleWidth 1#, msoTrue, msoScaleFromTopLeft
'/Picture format initialization
Application.Selection.CopyPicture
Set oDia = ActiveSheet.ChartObjects.Add(0, 0, oShape.Width, oShape.Height)
Set oChartArea = oDia. Chart
oDia.Activate
With oChartArea
.ChartArea.Select
.Paste
.Export ("H:\Webshop_Zpider\Strukturbildene\" & strImageName & ".jpg")
End With
oDia.Delete 'oChartArea.Delete
Next
Chart
oDia.Activate
With oChartArea
.ChartArea.Select
.Paste
.Export ("H:\Webshop_Zpider\Strukturbildene\" & strImageName & ".jpg")
End With
oDia.Delete 'oChartArea.Delete
Next
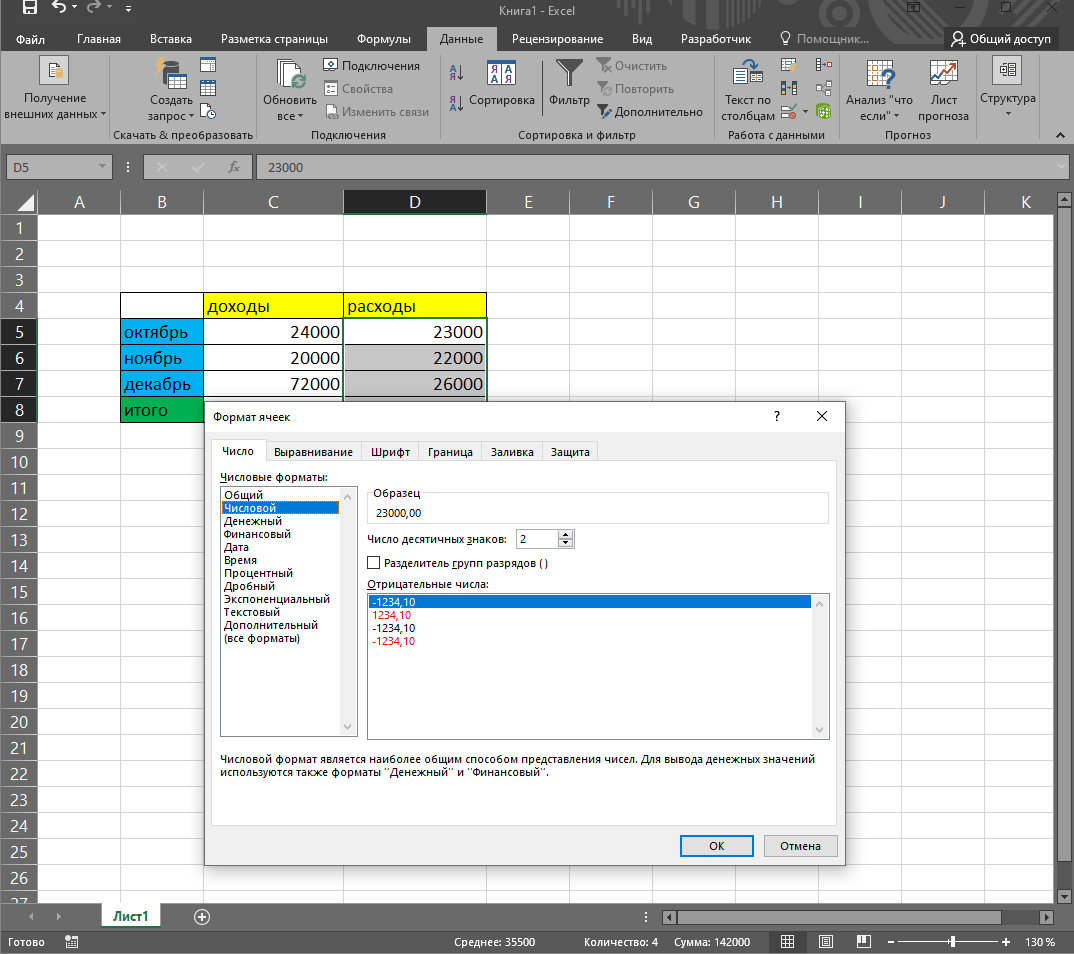 Shapes(MyChart)
.Width = PicWidth
.Height = PicHeight
End With
.Shapes(MyPicture).Copy
With ActiveChart
.ChartArea.Select
.Paste
End With
.ChartObjects(1).Chart.Export Filename:="MyPic.jpg", FilterName:="jpg"
.Shapes(MyChart).Cut
End With
Application.ScreenUpdating = True
Exit Sub
Finish:
MsgBox "You must select a picture"
End Sub
Shapes(MyChart)
.Width = PicWidth
.Height = PicHeight
End With
.Shapes(MyPicture).Copy
With ActiveChart
.ChartArea.Select
.Paste
End With
.ChartObjects(1).Chart.Export Filename:="MyPic.jpg", FilterName:="jpg"
.Shapes(MyChart).Cut
End With
Application.ScreenUpdating = True
Exit Sub
Finish:
MsgBox "You must select a picture"
End Sub
 CopyPicture Appearance:=xlScreen, Format:=xlBitmap
''' Create an empty chart with exact size of range copied
With ActiveSheet.ChartObjects.Add(Left:=rgExp.Left, Top:=rgExp.Top, _
Width:=rgExp.Width, Height:=rgExp.Height)
.Name = "ChartVolumeMetricsDevEXPORT"
.Activate
End With
''' Paste into chart area, export to file, delete chart.
ActiveChart.Paste
ActiveSheet.ChartObjects("ChartVolumeMetricsDevEXPORT").Chart.Export "C:\ExportmyChart.jpg"
ActiveSheet.ChartObjects("ChartVolumeMetricsDevEXPORT").Delete
CopyPicture Appearance:=xlScreen, Format:=xlBitmap
''' Create an empty chart with exact size of range copied
With ActiveSheet.ChartObjects.Add(Left:=rgExp.Left, Top:=rgExp.Top, _
Width:=rgExp.Width, Height:=rgExp.Height)
.Name = "ChartVolumeMetricsDevEXPORT"
.Activate
End With
''' Paste into chart area, export to file, delete chart.
ActiveChart.Paste
ActiveSheet.ChartObjects("ChartVolumeMetricsDevEXPORT").Chart.Export "C:\ExportmyChart.jpg"
ActiveSheet.ChartObjects("ChartVolumeMetricsDevEXPORT").Delete
 Предупреждение: он не запрашивает подтверждение перед заменой существующих файлов с тем же именем и расширением.
Предупреждение: он не запрашивает подтверждение перед заменой существующих файлов с тем же именем и расширением. Chart
shp.CopyPicture 'Copy image to clipboard
With chrtArea 'Paste image to chart, then export
.ChartArea.Select
.Paste
.Export (path & newFile)
End With
chrt.Delete 'Delete chart
shp.Delete 'Delete imported image
file = Dir 'Advance to next file
Loop
Application.ScreenUpdating = True
Application.DisplayAlerts = True
End Sub
Chart
shp.CopyPicture 'Copy image to clipboard
With chrtArea 'Paste image to chart, then export
.ChartArea.Select
.Paste
.Export (path & newFile)
End With
chrt.Delete 'Delete chart
shp.Delete 'Delete imported image
file = Dir 'Advance to next file
Loop
Application.ScreenUpdating = True
Application.DisplayAlerts = True
End Sub
 Shapes
pic.Copy
sFileName = saveSceenshotTo & Range("A" & i).Text & pictureFormat
Call ExportPicWithIfran(sFileName)
i = i + 1
Next
End Sub
Public Sub ExportPicWithIfran(sSaveAsPath As String)
Const sIfranPath As String = "C:\Program Files\IrfanView\i_view32.exe"
Dim sRunIfran As String
sRunIfran = sIfranPath & " /clippaste /convert=" & _
sSaveAsPath & " /killmesoftly"
' Shell is no good here. If you have more than 1 pic, it will
' mess things up (pics will over run other pics, becuase Shell does
' not make vba wait for the script to finish).
' Shell sRunIfran, vbHide
' Correct way (it will now wait for the batch to finish):
call MyShell(sRunIfran )
End Sub
Shapes
pic.Copy
sFileName = saveSceenshotTo & Range("A" & i).Text & pictureFormat
Call ExportPicWithIfran(sFileName)
i = i + 1
Next
End Sub
Public Sub ExportPicWithIfran(sSaveAsPath As String)
Const sIfranPath As String = "C:\Program Files\IrfanView\i_view32.exe"
Dim sRunIfran As String
sRunIfran = sIfranPath & " /clippaste /convert=" & _
sSaveAsPath & " /killmesoftly"
' Shell is no good here. If you have more than 1 pic, it will
' mess things up (pics will over run other pics, becuase Shell does
' not make vba wait for the script to finish).
' Shell sRunIfran, vbHide
' Correct way (it will now wait for the batch to finish):
call MyShell(sRunIfran )
End Sub
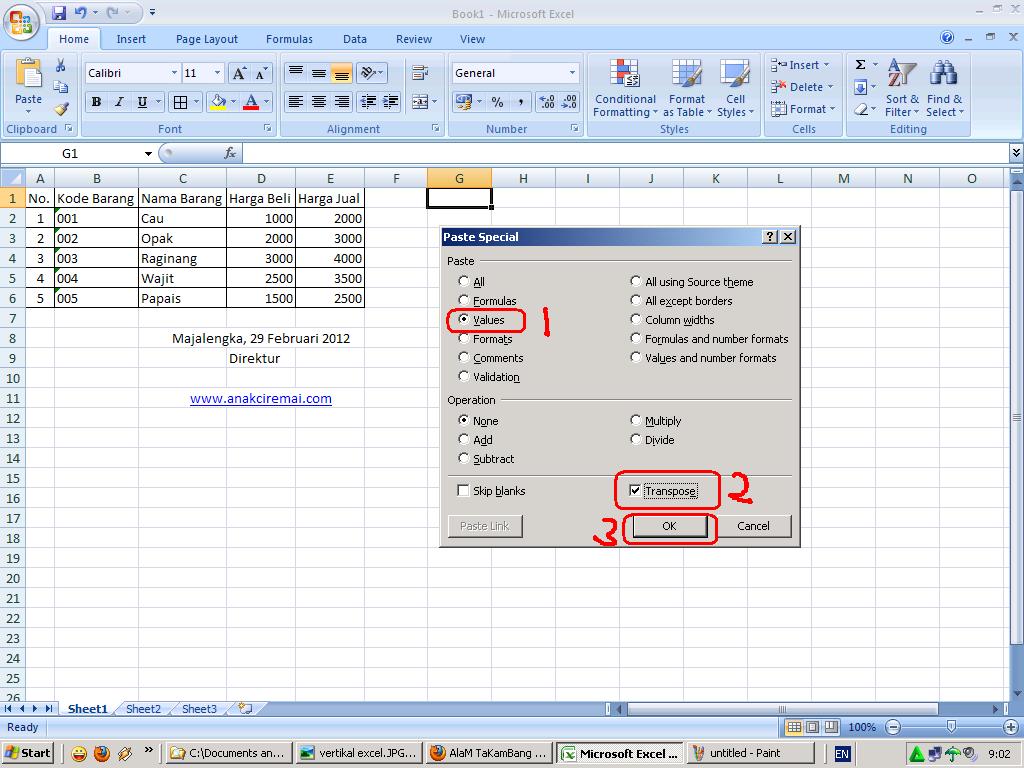 CreateObject("WScript.Shell")
waitOnReturn = True
windowStyle = vbHide
wsh.Run strShell, windowStyle, waitOnReturn
End Sub
CreateObject("WScript.Shell")
waitOnReturn = True
windowStyle = vbHide
wsh.Run strShell, windowStyle, waitOnReturn
End Sub
 Обратите внимание, что я назвал один из своих листов wsTMP, вы можете заменить его Листом1 или чем-то подобным. Печать скриншота до целевого пути занимает около 1 секунды.
Обратите внимание, что я назвал один из своих листов wsTMP, вы можете заменить его Листом1 или чем-то подобным. Печать скриншота до целевого пути занимает около 1 секунды. Shapes(1).Width
h = wsTMP.Shapes(1).Height
Application.DisplayAlerts = False
Set tmp = Charts.Add
On Error Resume Next
With tmp
.PageSetup.PaperSize = xlPaper11x17
.PageSetup.TopMargin = IIf(w > dw, dh - dw * h / w, dh - h) + 28
.PageSetup.BottomMargin = 0
.PageSetup.RightMargin = IIf(h > dh, dw - dh * w / h, dw - w) + 36
.PageSetup.LeftMargin = 0
.PageSetup.HeaderMargin = 0
.PageSetup.FooterMargin = 0
.SeriesCollection(1).Delete
DoEvents
.Paste
DoEvents
.Export Filename:=str, Filtername:="jpeg"
.Delete
End With
On Error GoTo 0
Do Until wsTMP.Shapes.Count < 1
wsTMP.Shapes(1).Delete
Loop
Application.PrintCommunication = True
Application.EnableEvents = True
Application.Calculation = xlCalculationAutomatic
Application.ScreenUpdating = True
Application.StatusBar = False
End Sub
Shapes(1).Width
h = wsTMP.Shapes(1).Height
Application.DisplayAlerts = False
Set tmp = Charts.Add
On Error Resume Next
With tmp
.PageSetup.PaperSize = xlPaper11x17
.PageSetup.TopMargin = IIf(w > dw, dh - dw * h / w, dh - h) + 28
.PageSetup.BottomMargin = 0
.PageSetup.RightMargin = IIf(h > dh, dw - dh * w / h, dw - w) + 36
.PageSetup.LeftMargin = 0
.PageSetup.HeaderMargin = 0
.PageSetup.FooterMargin = 0
.SeriesCollection(1).Delete
DoEvents
.Paste
DoEvents
.Export Filename:=str, Filtername:="jpeg"
.Delete
End With
On Error GoTo 0
Do Until wsTMP.Shapes.Count < 1
wsTMP.Shapes(1).Delete
Loop
Application.PrintCommunication = True
Application.EnableEvents = True
Application.Calculation = xlCalculationAutomatic
Application.ScreenUpdating = True
Application.StatusBar = False
End Sub
 ..
.. Моя цель-создать excel с macros из xml.
Моя цель-создать excel с macros из xml. Итак, можно ли…
Итак, можно ли…

 com/
com/ 976242529.97305060
976242529.97305060 Файл Microsoft Excel можно преобразовать в другой формат с помощью команды «Сохранить как» в Excel. Форматы файлов, доступные в диалоговом окне Сохранение документа, зависят от типа активного листа (обычный, диаграмма или другой тип листа). Для большинства форматов файлов преобразуется только активный лист. Чтобы преобразовать другие листы, нужно открыть и сохранить их по отдельности. При преобразовании файла в другой формат часть форматирования, данных и других свойств может быть утрачена. Файлы можно открывать и сохранять в текстовых форматах. При сохранении книги в текстовом формате теряются все элементы форматирования. Можно конвертировать файл Excel в картинку? Допустим, вам нужно конвертировать xls в bmp или конвертировать xls в jpg. Как конвертировать эксель в графический формат?
Файл Microsoft Excel можно преобразовать в другой формат с помощью команды «Сохранить как» в Excel. Форматы файлов, доступные в диалоговом окне Сохранение документа, зависят от типа активного листа (обычный, диаграмма или другой тип листа). Для большинства форматов файлов преобразуется только активный лист. Чтобы преобразовать другие листы, нужно открыть и сохранить их по отдельности. При преобразовании файла в другой формат часть форматирования, данных и других свойств может быть утрачена. Файлы можно открывать и сохранять в текстовых форматах. При сохранении книги в текстовом формате теряются все элементы форматирования. Можно конвертировать файл Excel в картинку? Допустим, вам нужно конвертировать xls в bmp или конвертировать xls в jpg. Как конвертировать эксель в графический формат? Есть конвертеры, которые способны конвертировать xls в png или конвертировать xlsx в jpeg. Скорость преобразования определит, насколько быстро будет происходить конвертирование файла. Думаем, намного приятнее и удобнее, когда процесс происходит быстро. Чем выше скорость конвертера, тем больше файлов вы сможете преобразовать за меньший промежуток времени. Если вы не любите сложные программы, то вы наверняка согласитесь что простота в использовании – тоже немаловажная особенность.
Есть конвертеры, которые способны конвертировать xls в png или конвертировать xlsx в jpeg. Скорость преобразования определит, насколько быстро будет происходить конвертирование файла. Думаем, намного приятнее и удобнее, когда процесс происходит быстро. Чем выше скорость конвертера, тем больше файлов вы сможете преобразовать за меньший промежуток времени. Если вы не любите сложные программы, то вы наверняка согласитесь что простота в использовании – тоже немаловажная особенность.

 Доступ к этой функции можно получить, щелкнув логотип электронной почты рядом с кнопкой загрузки на каждой странице результатов.
Доступ к этой функции можно получить, щелкнув логотип электронной почты рядом с кнопкой загрузки на каждой странице результатов. Есть три метода:
Есть три метода:
 )
)
 Если у вас iPhone, щелкните правой кнопкой мыши в Excel на Mac и выберите «Сканировать документы». Ваш iPhone загорится. Затем вы можете сфотографировать данные и, следуя инструкциям на экране, быстро перенести данные в Excel.
Если у вас iPhone, щелкните правой кнопкой мыши в Excel на Mac и выберите «Сканировать документы». Ваш iPhone загорится. Затем вы можете сфотографировать данные и, следуя инструкциям на экране, быстро перенести данные в Excel. Просто сделайте снимок каждого из них, перенесите изображения на свой Mac (OneDrive отлично подходит для этого). Затем щелкните «Вставка»> «Данные из рисунка»> «Рисунок из файла » и следуйте инструкциям на экране, чтобы преобразовать изображение в данные.
Просто сделайте снимок каждого из них, перенесите изображения на свой Mac (OneDrive отлично подходит для этого). Затем щелкните «Вставка»> «Данные из рисунка»> «Рисунок из файла » и следуйте инструкциям на экране, чтобы преобразовать изображение в данные. Нажмите Игнорировать , чтобы перейти к следующей проблеме, или Изменить , чтобы исправить проблему.
Нажмите Игнорировать , чтобы перейти к следующей проблеме, или Изменить , чтобы исправить проблему. Также
Также
 Вы можете использовать перетаскивание, чтобы выделить определенные части для преобразования.
Вы можете использовать перетаскивание, чтобы выделить определенные части для преобразования. Д. Затем просмотрите результаты преобразования перед преобразованием данных.
Д. Затем просмотрите результаты преобразования перед преобразованием данных. Начните с загрузки 7-дневной бесплатной пробной версии ниже!
Начните с загрузки 7-дневной бесплатной пробной версии ниже!
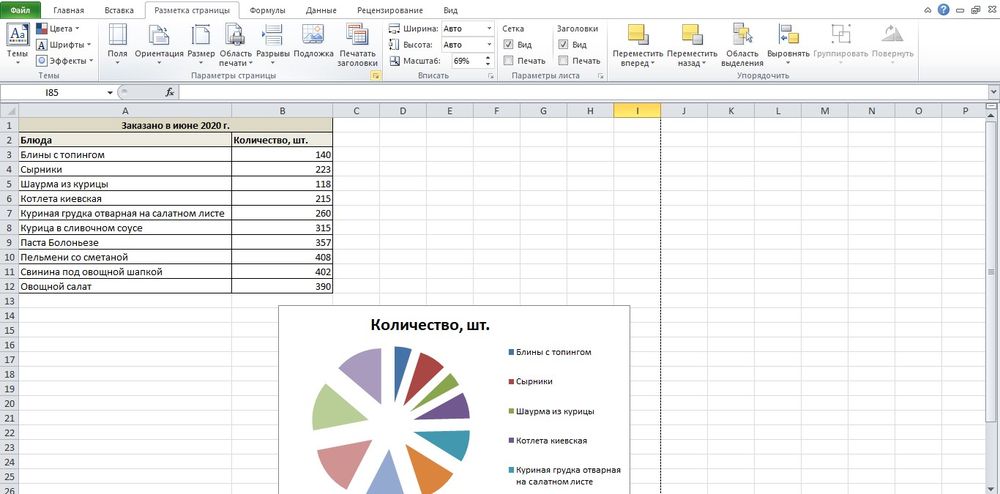

 Бесплатные версии мобильных приложений для повышения продуктивности предоставляют вам базовые инструменты редактирования.С подпиской на Microsoft Office вы можете разблокировать больше функций, например, возможность сотрудничать с коллегами.
Бесплатные версии мобильных приложений для повышения продуктивности предоставляют вам базовые инструменты редактирования.С подпиской на Microsoft Office вы можете разблокировать больше функций, например, возможность сотрудничать с коллегами.
 После каждого изменения нажимайте Готово. Вы также можете коснуться невыделенных ячеек, чтобы внести исправления или изменения.
После каждого изменения нажимайте Готово. Вы также можете коснуться невыделенных ячеек, чтобы внести исправления или изменения.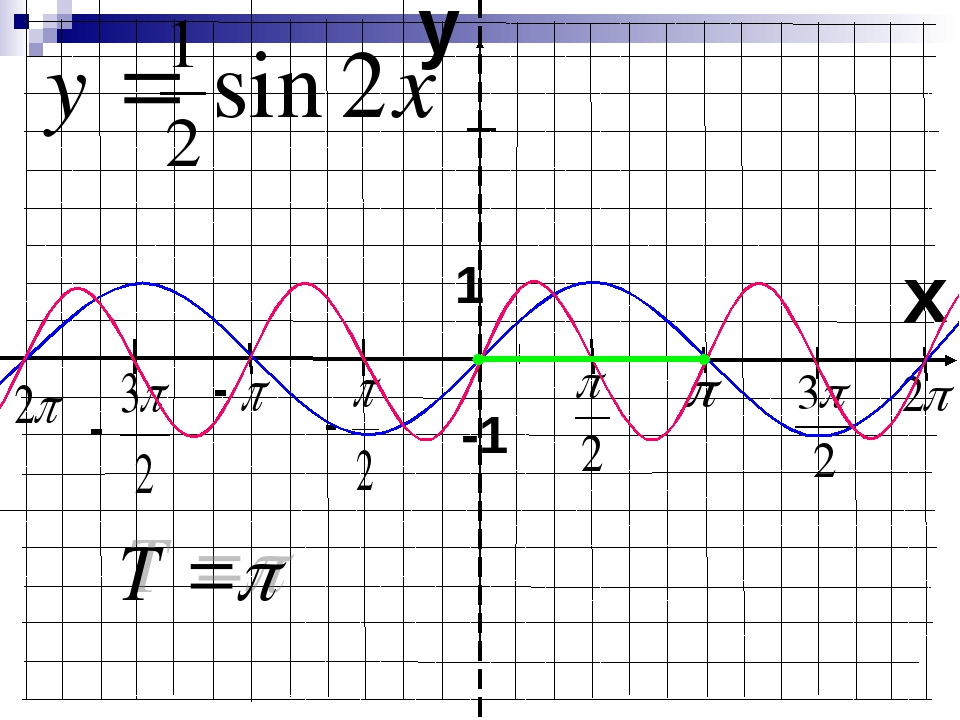 Режим позволяет построить график кривой, заданной в полярной системе
координат, то
есть уравнением где — радиальная координата, а — полярная координата.
Режим позволяет построить график кривой, заданной в полярной системе
координат, то
есть уравнением где — радиальная координата, а — полярная координата. 3 дают
3 дают 
 7).
7).
 1
1 5).
5). 2».
2». Построение графика функции позволяет увидеть геометрический образ той или иной математической функции. Для того чтобы вам было удобнее строить такой график, мы создали специальное онлайн приложение. Оно абсолютно бесплатно, не требует регистрации и доступно для использования прямо в браузере без каких-либо дополнительных настроек и манипуляций. Строить графики для разнообразных функций чаще всего требуется школьникам средних и старших классов, изучающим алгебру и геометрию, а также студентам первых и вторых курсов в рамках прохождения курсов высшей математики. Как правило, данный процесс занимает много времени и требует кучу канцелярских принадлежностей, чтобы начертить оси графика на бумаге, проставить точки координат, объединить их ровной линией и т.д. С помощью данного онлайн сервиса вы сможете рассчитать и создать графическое изображение функции моментально.
Построение графика функции позволяет увидеть геометрический образ той или иной математической функции. Для того чтобы вам было удобнее строить такой график, мы создали специальное онлайн приложение. Оно абсолютно бесплатно, не требует регистрации и доступно для использования прямо в браузере без каких-либо дополнительных настроек и манипуляций. Строить графики для разнообразных функций чаще всего требуется школьникам средних и старших классов, изучающим алгебру и геометрию, а также студентам первых и вторых курсов в рамках прохождения курсов высшей математики. Как правило, данный процесс занимает много времени и требует кучу канцелярских принадлежностей, чтобы начертить оси графика на бумаге, проставить точки координат, объединить их ровной линией и т.д. С помощью данного онлайн сервиса вы сможете рассчитать и создать графическое изображение функции моментально. ». Это обусловлено отсутствием на клавиатуре компьютера возможности прописать степень в привычном формате. Далее приведена таблица с полным списком поддерживаемых функций.
». Это обусловлено отсутствием на клавиатуре компьютера возможности прописать степень в привычном формате. Далее приведена таблица с полным списком поддерживаемых функций. ..)
..)

 Свойства функции у=sin xПромежутки монотонности:
Свойства функции у=sin xПромежутки монотонности: Преобразование графиков тригонометрических функцийПостройте график
Преобразование графиков тригонометрических функцийПостройте график Преобразование графиков тригонометрических функций путем сжатия и растяженияy=4sinx
Преобразование графиков тригонометрических функций путем сжатия и растяженияy=4sinx Преобразование графиков тригонометрических функций путем сжатия и растяженияy = -3sinx
Преобразование графиков тригонометрических функций путем сжатия и растяженияy = -3sinx Для любознательных…Посмотрите как выглядят графики некоторых других триг. функций:
Для любознательных…Посмотрите как выглядят графики некоторых других триг. функций:

 )
)



 Например, если вы введете
2+ (sin (x
он добавит две дополнительные закрывающие круглые скобки, чтобы они уравновесили и оценили его как 2+ (sin (x)) Примечание: Это не всегда может дать желаемый результат.Лучше всегда самостоятельно вводить правильное выражение.
Например, если вы введете
2+ (sin (x
он добавит две дополнительные закрывающие круглые скобки, чтобы они уравновесили и оценили его как 2+ (sin (x)) Примечание: Это не всегда может дать желаемый результат.Лучше всегда самостоятельно вводить правильное выражение.
 Чтобы изменить их, просто отредактируйте их на месте и снова нажмите ГРАФИК или клавишу Enter.
Чтобы изменить их, просто отредактируйте их на месте и снова нажмите ГРАФИК или клавишу Enter. Обратите внимание, что первая функция — это sin (a * x). Это означает, что каждый раз, когда точка строится, это синус текущего значения x, умноженного на переменную a.Эта переменная управляется ползунком справа, поэтому при перемещении ползунка вы можете увидеть эффект изменения его значения. *
Обратите внимание, что первая функция — это sin (a * x). Это означает, что каждый раз, когда точка строится, это синус текущего значения x, умноженного на переменную a.Эта переменная управляется ползунком справа, поэтому при перемещении ползунка вы можете увидеть эффект изменения его значения. *  Откроется новое окно с новым экземпляром GFE, размер которого зависит от вашего монитора.
Это может быть полезно в классе с проектором.
Откроется новое окно с новым экземпляром GFE, размер которого зависит от вашего монитора.
Это может быть полезно в классе с проектором.
 В следующем примере используются разные константы.Не запутайтесь!
В следующем примере используются разные константы.Не запутайтесь! 5 * cos (2 * # 1)}% функция для построения графика
\ const {Width} {10}% от общей ширины в см
\ const {Height} {4}% от общей высоты в см
\ const {POL} {- 0.20}% смещение изображения влево в см
\ const {POR} {0.50}% смещение изображения вправо в см
\ const {POB} {- 0.20}% смещение нижнего края изображения в см
\ const {POT} {0.50}% смещение верхнего края изображения в см
\ const {AOL} {- 0.20}% смещение оси влево в см
\ const {AOR} {0.30}% смещение оси вправо в см
\ const {AOB} {- 0.20}% нижнее смещение оси в см
\ const {AOT} {0.30}% смещение вершины оси в см
\ const {DomL} {- 2 * pi}% домена осталось
\ const {DomR} {2 * pi}% право домена
\ const {DomB} {- 2}% домен внизу
\ const {DomT} {2}% верхнего уровня домена
\ const [0] {TrigLabelBase} {2}% знаменатель доли числа пи
% Внутренние используемые константы:
\ const {XUnit} {(Ширина-POR + POL-AOR + AOL) / (DomR-DomL)}
\ const {YUnit} {(Высота-POT + POB-AOT + AOB) / (DomT-DomB)}
\ const {PicL} {(POL + AOL) / XUnit + DomL}
\ const {PicR} {(POR + AOR) / XUnit + DomR}
\ const {PicB} {(POB + AOB) / YUnit + DomB}
\ const {PicT} {(POT + AOT) / YUnit + DomT}
\ const {AxiL} {AOL / XUnit + DomL}
\ const {AxiR} {AOR / XUnit + DomR}
\ const {AxiB} {AOB / YUnit + DomB}
\ const {AxiT} {AOT / YUnit + DomT}
\ const {DeltaX} {pi / TrigLabelBase}
\ psset {xunit = \ XUnit, yunit = \ YUnit, algebraic, plotpoints = 500}
\ begin {document}
\ begin {pspicture} [showgrid = false] (\ PicL, \ PicB) (\ PicR, \ PicT)
\ psplot [цвет линии = красный] {\ DomL} {\ DomR} {\ f (x)}
\ psplot [цвет линии = синий] {\ DomL} {\ DomR} {\ g (x)}
\ psaxes
[
trigLabels = истина,
labelFontSize = \ scriptscriptstyle,
цвет тика = серый,
ticksize = -1.
5 * cos (2 * # 1)}% функция для построения графика
\ const {Width} {10}% от общей ширины в см
\ const {Height} {4}% от общей высоты в см
\ const {POL} {- 0.20}% смещение изображения влево в см
\ const {POR} {0.50}% смещение изображения вправо в см
\ const {POB} {- 0.20}% смещение нижнего края изображения в см
\ const {POT} {0.50}% смещение верхнего края изображения в см
\ const {AOL} {- 0.20}% смещение оси влево в см
\ const {AOR} {0.30}% смещение оси вправо в см
\ const {AOB} {- 0.20}% нижнее смещение оси в см
\ const {AOT} {0.30}% смещение вершины оси в см
\ const {DomL} {- 2 * pi}% домена осталось
\ const {DomR} {2 * pi}% право домена
\ const {DomB} {- 2}% домен внизу
\ const {DomT} {2}% верхнего уровня домена
\ const [0] {TrigLabelBase} {2}% знаменатель доли числа пи
% Внутренние используемые константы:
\ const {XUnit} {(Ширина-POR + POL-AOR + AOL) / (DomR-DomL)}
\ const {YUnit} {(Высота-POT + POB-AOT + AOB) / (DomT-DomB)}
\ const {PicL} {(POL + AOL) / XUnit + DomL}
\ const {PicR} {(POR + AOR) / XUnit + DomR}
\ const {PicB} {(POB + AOB) / YUnit + DomB}
\ const {PicT} {(POT + AOT) / YUnit + DomT}
\ const {AxiL} {AOL / XUnit + DomL}
\ const {AxiR} {AOR / XUnit + DomR}
\ const {AxiB} {AOB / YUnit + DomB}
\ const {AxiT} {AOT / YUnit + DomT}
\ const {DeltaX} {pi / TrigLabelBase}
\ psset {xunit = \ XUnit, yunit = \ YUnit, algebraic, plotpoints = 500}
\ begin {document}
\ begin {pspicture} [showgrid = false] (\ PicL, \ PicB) (\ PicR, \ PicT)
\ psplot [цвет линии = красный] {\ DomL} {\ DomR} {\ f (x)}
\ psplot [цвет линии = синий] {\ DomL} {\ DomR} {\ g (x)}
\ psaxes
[
trigLabels = истина,
labelFontSize = \ scriptscriptstyle,
цвет тика = серый,
ticksize = -1. 5pt 1.5pt,
xlabelsep = 3pt,
arrowscale = 1,
trigLabelBase = \ TrigLabelBase,
dx = \ DeltaX,% должен стоять перед xunit, чтобы избежать странного вывода!
] {->} (0,0) (\ AxiL, \ AxiB) (\ AxiR, \ AxiT) [$ x $, 0] [$ y $, 90]
\ end {pspicture}
\ конец {документ}
5pt 1.5pt,
xlabelsep = 3pt,
arrowscale = 1,
trigLabelBase = \ TrigLabelBase,
dx = \ DeltaX,% должен стоять перед xunit, чтобы избежать странного вывода!
] {->} (0,0) (\ AxiL, \ AxiB) (\ AxiR, \ AxiT) [$ x $, 0] [$ y $, 90]
\ end {pspicture}
\ конец {документ}
 (R, θ).
Мы интерпретируем rr как расстояние от Солнца и θθ как угловой пеленг планеты или ее направление от фиксированной точки на Солнце.В этом разделе мы сосредоточимся на полярной системе и графиках, которые создаются непосредственно из полярных координат.
(R, θ).
Мы интерпретируем rr как расстояние от Солнца и θθ как угловой пеленг планеты или ее направление от фиксированной точки на Солнце.В этом разделе мы сосредоточимся на полярной системе и графиках, которые создаются непосредственно из полярных координат.
 −r = −2sinθIdentity: sin (−θ) = — sinθ.r = 2sinθ Умножаем обе части на −1.
−r = −2sinθIdentity: sin (−θ) = — sinθ.r = 2sinθ Умножаем обе части на −1.
 (b) График симметричен относительно полярной оси ( x -ось), если заменить (r, θ) (r, θ) на (r, −θ) (r, −θ) или (−r, π − θ) (- r, π − θ) дает эквивалентное уравнение. (c) Граф является симметричным относительно полюса (начала координат), если замена (r, θ) (r, θ) на (−r, θ) (- r, θ) дает эквивалентное уравнение.
(b) График симметричен относительно полярной оси ( x -ось), если заменить (r, θ) (r, θ) на (r, −θ) (r, −θ) или (−r, π − θ) (- r, π − θ) дает эквивалентное уравнение. (c) Граф является симметричным относительно полюса (начала координат), если замена (r, θ) (r, θ) на (−r, θ) (- r, θ) дает эквивалентное уравнение.

 Однако использование свойств симметрии и нахождение ключевых значений θθ и rr означает, что потребуется меньше вычислений.
Однако использование свойств симметрии и нахождение ключевых значений θθ и rr означает, что потребуется меньше вычислений. | R |.
| R |. 0.
0. 73r = 2sin (π3) ≈1.73
73r = 2sin (π3) ≈1.73 г = 3cosθ.
г = 3cosθ. Для r = acosθ, r = acosθ центр равен (a2,0).(а2,0). Для r = asinθ, r = asinθ центром является (a2, π2). (A2, π2). На рисунке 5 показаны графики этих четырех кругов.
Для r = acosθ, r = acosθ центр равен (a2,0).(а2,0). Для r = asinθ, r = asinθ центром является (a2, π2). (A2, π2). На рисунке 5 показаны графики этих четырех кругов. Ключевой точкой для построения графика является (4,0). (4,0).
Ключевой точкой для построения графика является (4,0). (4,0).
 ab = 1. Кардиоидный график проходит через полюс, как мы видим на Рисунке 7.
ab = 1. Кардиоидный график проходит через полюс, как мы видим на Рисунке 7. θ = π + 2kπ. Нуль уравнения находится в точке (0, π). (0, π). График проходит через эту точку.
θ = π + 2kπ. Нуль уравнения находится в точке (0, π). (0, π). График проходит через эту точку.
 Однако это уравнение имеет график, который четко показывает симметрию относительно линии θ = π2, θ = π2, но не проходит все три теста на симметрию.Графический калькулятор сразу же продемонстрирует качество отражения графика.
Однако это уравнение имеет график, который четко показывает симметрию относительно линии θ = π2, θ = π2, но не проходит все три теста на симметрию.Графический калькулятор сразу же продемонстрирует качество отражения графика. r. Таким образом, r = 1.r = 1.
r. Таким образом, r = 1.r = 1. 5
5
 г = 2 + 5cosθ.
г = 2 + 5cosθ.

 2θ = π2θ4 = π4 9 точка (0, π4) (0, π4) является нулем уравнения.
2θ = π2θ4 = π4 9 точка (0, π4) (0, π4) является нулем уравнения.


 Возникает определенная закономерность. Посмотрите на диапазон значений r : 2, 0, −2, 0, 2, 0, −2 и т. Д. Это представляет развитие кривой по одному лепестку за раз. Начиная с r = 0, r = 0, каждый лепесток простирается на расстояние r = 2, r = 2, а затем возвращается к нулю 2n2n раз, всего восемь лепестков. См. График на рисунке 16.
Возникает определенная закономерность. Посмотрите на диапазон значений r : 2, 0, −2, 0, 2, 0, −2 и т. Д. Это представляет развитие кривой по одному лепестку за раз. Начиная с r = 0, r = 0, каждый лепесток простирается на расстояние r = 2, r = 2, а затем возвращается к нулю 2n2n раз, всего восемь лепестков. См. График на рисунке 16. r = 2sin (5θ).
r = 2sin (5θ).
 См. Рисунок 18.
См. Рисунок 18.
 На рисунках 20 и 21 представлены графики и уравнения для каждой из этих кривых.
На рисунках 20 и 21 представлены графики и уравнения для каждой из этих кривых.

 Полный учебный план упражнений и видео. Важный! Бесплатный калькулятор тригонометрических уравнений — решайте тригонометрические уравнения шаг за шагом. Поддержка по телефону доступна с понедельника по пятницу с 9:00 до 22:00 по восточноевропейскому времени. Precise Calculator — это программа калькулятора для Windows, которая является бесплатным и открытым исходным кодом. Онлайн-калькулятор.Два других значения будут заполнены. Некоторые из них включают Sin, Cos, Tan, Csc, Sec и многие другие. Калькулятор синусов. Изучите тригонометрию бесплатно — прямоугольные треугольники, единичный круг, графики, тождества и многое другое. Этот набор калькуляторов тригонометрии, безусловно, должен помочь в этом. Нажмите кнопку =, чтобы рассчитать результат. Решать. Список справки по математике — признан лучшим калькулятором: электронная почта с калькулятором процентов. Как пользоваться калькулятором тригонометрии? Тригнометрические выражения — это выражения, которые включают синус-функции, косинус-функции, касательные функции.
Полный учебный план упражнений и видео. Важный! Бесплатный калькулятор тригонометрических уравнений — решайте тригонометрические уравнения шаг за шагом. Поддержка по телефону доступна с понедельника по пятницу с 9:00 до 22:00 по восточноевропейскому времени. Precise Calculator — это программа калькулятора для Windows, которая является бесплатным и открытым исходным кодом. Онлайн-калькулятор.Два других значения будут заполнены. Некоторые из них включают Sin, Cos, Tan, Csc, Sec и многие другие. Калькулятор синусов. Изучите тригонометрию бесплатно — прямоугольные треугольники, единичный круг, графики, тождества и многое другое. Этот набор калькуляторов тригонометрии, безусловно, должен помочь в этом. Нажмите кнопку =, чтобы рассчитать результат. Решать. Список справки по математике — признан лучшим калькулятором: электронная почта с калькулятором процентов. Как пользоваться калькулятором тригонометрии? Тригнометрические выражения — это выражения, которые включают синус-функции, косинус-функции, касательные функции. .. Упростите тригонометрическое выражение. Калькулятор арксинуса. Калькулятор тригонометрии. Радианы в градусах () • Нажмите, чтобы сфотографировать проблему. Калькулятор тригонометрии Щелкните здесь, чтобы просмотреть краткое руководство по тригонометрии. Вы можете просмотреть диапазоны на графиках обратной тригонометрической функции. Найдите больше образовательных виджетов в Wolfram | Alpha. Калькулятор тригонометрии — это бесплатный онлайн-инструмент, который отображает значения шести важных тригонометрических функций. Все калькуляторы в указанной выше категории калькуляторов тригонометрии разработаны с учетом удобства пользователя.Код для добавления этой кальки на ваш сайт. Поддерживает ввод десятичных чисел (0,5, 6, -1 и т. Д.) С помощью этой бесплатной загрузки калькулятора тригонометрии пользователи могут многое сделать на основе множества функций, которые он отображает. С легкостью решайте тригонометрические интегралы с помощью нашего бесплатного онлайн-калькулятора. Первым шагом использования калькулятора является выбор тригонометрической функции.
.. Упростите тригонометрическое выражение. Калькулятор арксинуса. Калькулятор тригонометрии. Радианы в градусах () • Нажмите, чтобы сфотографировать проблему. Калькулятор тригонометрии Щелкните здесь, чтобы просмотреть краткое руководство по тригонометрии. Вы можете просмотреть диапазоны на графиках обратной тригонометрической функции. Найдите больше образовательных виджетов в Wolfram | Alpha. Калькулятор тригонометрии — это бесплатный онлайн-инструмент, который отображает значения шести важных тригонометрических функций. Все калькуляторы в указанной выше категории калькуляторов тригонометрии разработаны с учетом удобства пользователя.Код для добавления этой кальки на ваш сайт. Поддерживает ввод десятичных чисел (0,5, 6, -1 и т. Д.) С помощью этой бесплатной загрузки калькулятора тригонометрии пользователи могут многое сделать на основе множества функций, которые он отображает. С легкостью решайте тригонометрические интегралы с помощью нашего бесплатного онлайн-калькулятора. Первым шагом использования калькулятора является выбор тригонометрической функции. Этот онлайн-калькулятор вычисляет значения элементарных тригонометрических функций, таких как sin, cos, tg, ctg, sec, cosec для угла, который может быть задан в градусах, радианах или градусах.Онлайн-инструмент для вычисления арксинуса с выводом в градусах или радианах. список переменных матрицы вычислений статистики тригонометрии алгебры. Подробные пошаговые решения ваших задач тригонометрических интегралов онлайн с помощью нашего математического решателя и калькулятора. Главная Калькуляторы Мобильные приложения Курсы математики Математические игры. Практика построения графиков решений; Бета геометрии; Шпаргалки по группам записных книжек; Войти ; Присоединиться; Обновление; Детали учетной записи Параметры входа в систему Настройки управления учетной записью • trig_calculator онлайн. Этот тригонометрический калькулятор поможет вам вычислить тригонометрические функции, такие как синус, косинус, тангенс, котангенс, секанс, косеканс.Описание: Этот калькулятор позволяет вычислять тригонометрические выражения с помощью различных тригонометрических формул.
Этот онлайн-калькулятор вычисляет значения элементарных тригонометрических функций, таких как sin, cos, tg, ctg, sec, cosec для угла, который может быть задан в градусах, радианах или градусах.Онлайн-инструмент для вычисления арксинуса с выводом в градусах или радианах. список переменных матрицы вычислений статистики тригонометрии алгебры. Подробные пошаговые решения ваших задач тригонометрических интегралов онлайн с помощью нашего математического решателя и калькулятора. Главная Калькуляторы Мобильные приложения Курсы математики Математические игры. Практика построения графиков решений; Бета геометрии; Шпаргалки по группам записных книжек; Войти ; Присоединиться; Обновление; Детали учетной записи Параметры входа в систему Настройки управления учетной записью • trig_calculator онлайн. Этот тригонометрический калькулятор поможет вам вычислить тригонометрические функции, такие как синус, косинус, тангенс, котангенс, секанс, косеканс.Описание: Этот калькулятор позволяет вычислять тригонометрические выражения с помощью различных тригонометрических формул. Другая платформа Да, Onlinecalculator.guru — это надежный веб-портал, который предлагает бесплатные онлайн-калькуляторы тригонометрии по всем темам. Распечатать . Вычисляйте тригонометрические интегралы и получайте пошаговое объяснение каждого решения. Большой выбор бесплатных онлайн-калькуляторов тригонометрии на GIGAcalculator.com. и дроби (1/4, 2/3, 4/3, 1/3 и т. д. Темы Вход в систему. Калькулятор может вычислять тригонометрические, экспоненциальные, гамма-функции и функции Бесселя для комплексного числа.Используя этот сайт, вы соглашаетесь с нашей Политикой в отношении файлов cookie. Помимо этого, его также можно использовать для выполнения некоторых других математических вычислений. Калькулятор найдет точные или приблизительные решения по индивидуальному заказу. В поле со списком выберите тип угла: градусы (°) или радианы (рад). Онлайн-калькулятор тригонометрии BYJU ™ S ускоряет вычисления и отображает тригонометрические значения за доли секунды. Узнать больше Принять. Калькулятор исчисления.
Другая платформа Да, Onlinecalculator.guru — это надежный веб-портал, который предлагает бесплатные онлайн-калькуляторы тригонометрии по всем темам. Распечатать . Вычисляйте тригонометрические интегралы и получайте пошаговое объяснение каждого решения. Большой выбор бесплатных онлайн-калькуляторов тригонометрии на GIGAcalculator.com. и дроби (1/4, 2/3, 4/3, 1/3 и т. д. Темы Вход в систему. Калькулятор может вычислять тригонометрические, экспоненциальные, гамма-функции и функции Бесселя для комплексного числа.Используя этот сайт, вы соглашаетесь с нашей Политикой в отношении файлов cookie. Помимо этого, его также можно использовать для выполнения некоторых других математических вычислений. Калькулятор найдет точные или приблизительные решения по индивидуальному заказу. В поле со списком выберите тип угла: градусы (°) или радианы (рад). Онлайн-калькулятор тригонометрии BYJU ™ S ускоряет вычисления и отображает тригонометрические значения за доли секунды. Узнать больше Принять. Калькулятор исчисления. Калькулятор. функция: угол θ: радианы (используйте пи вместо Ï €) Голос клиента.Онлайн калькулятор тригонометрических интегралов с решением и шагами. Изучите тригонометрию бесплатно — прямоугольные треугольники, единичный круг, графики, тождества и многое другое. Решенные упражнения тригонометрических интегралов. Этот калькулятор тригонометрии использует режим [RAD] или режим радиан. Калькулятор автоматически определяет количество правильных цифр в результате операции и возвращает его точный результат. Вычислите значение любой тригонометрической функции с помощью нашего калькулятора тригонометрии. Используется для тригонометрических расчетов.Но для этого вы должны иметь базовые знания о командах, используемых для достижения желаемых результатов. Простой калькулятор углов для прямоугольных треугольников. Этот калькулятор может решать основные тригонометрические уравнения, такие как: $ \ color {blue} {\ sin (x) = \ frac {1} {2}} $ или $ \ color {blue} {\ sqrt {2} \ cos \ left (- \ frac {3x} {4} \ right) — 1 = 0} $.
Калькулятор. функция: угол θ: радианы (используйте пи вместо Ï €) Голос клиента.Онлайн калькулятор тригонометрических интегралов с решением и шагами. Изучите тригонометрию бесплатно — прямоугольные треугольники, единичный круг, графики, тождества и многое другое. Решенные упражнения тригонометрических интегралов. Этот калькулятор тригонометрии использует режим [RAD] или режим радиан. Калькулятор автоматически определяет количество правильных цифр в результате операции и возвращает его точный результат. Вычислите значение любой тригонометрической функции с помощью нашего калькулятора тригонометрии. Используется для тригонометрических расчетов.Но для этого вы должны иметь базовые знания о командах, используемых для достижения желаемых результатов. Простой калькулятор углов для прямоугольных треугольников. Этот калькулятор может решать основные тригонометрические уравнения, такие как: $ \ color {blue} {\ sin (x) = \ frac {1} {2}} $ или $ \ color {blue} {\ sqrt {2} \ cos \ left (- \ frac {3x} {4} \ right) — 1 = 0} $. Скачать калькулятор тригонометрии, как получить многочлен в результате уравнения вычитания, упорядочивая дроби от наименьшего к наибольшему. Введите значения трех из шести сторон и углов треугольника, и остальные три значения будут вычислены.Калькуляторы Темы Методы решения Премиум. Постройте график своих математических задач. Единицы измерения угла: Угол: ° Площадь: Сторона: Сторона: Угол: ° Сторона: Угол: ° Очистить: Инструкции по вычислению треугольников. калькуляторы. Средство визуализации математических выражений, графики, конвертер единиц, средство решения уравнений, комплексные числа, история вычислений. Advanced Trigonometry Calculator — это приложение, которое поможет вам выполнять сложные вычисления с научным представлением и амплитудами в положительных и отрицательных аргументах. Чтобы ввести значение, щелкните внутри одного из текстовых полей.Как пользоваться калькулятором тригонометрии. Калькулятор тригонометрии — калькулятор угла. Чтобы вычислить sin (x) на калькуляторе: Введите входной угол.
Скачать калькулятор тригонометрии, как получить многочлен в результате уравнения вычитания, упорядочивая дроби от наименьшего к наибольшему. Введите значения трех из шести сторон и углов треугольника, и остальные три значения будут вычислены.Калькуляторы Темы Методы решения Премиум. Постройте график своих математических задач. Единицы измерения угла: Угол: ° Площадь: Сторона: Сторона: Угол: ° Сторона: Угол: ° Очистить: Инструкции по вычислению треугольников. калькуляторы. Средство визуализации математических выражений, графики, конвертер единиц, средство решения уравнений, комплексные числа, история вычислений. Advanced Trigonometry Calculator — это приложение, которое поможет вам выполнять сложные вычисления с научным представлением и амплитудами в положительных и отрицательных аргументах. Чтобы ввести значение, щелкните внутри одного из текстовых полей.Как пользоваться калькулятором тригонометрии. Калькулятор тригонометрии — калькулятор угла. Чтобы вычислить sin (x) на калькуляторе: Введите входной угол. Также изучите множество других калькуляторов, охватывающих геометрию, математику и другие темы. Используйте этот калькулятор арксинуса, чтобы легко вычислить арксинус числа. ЧАСТО ЗАДАВАЕМЫЕ ВОПРОСЫ. Вход>>> Вход. Advanced Trigonometry Calculator — это простая бесплатная программа, которую можно использовать для решения тригонометрических задач. Факторизация суммы и разности двух кубиков, Средняя школа с pizzazz… Использует тригонометрию для вычисления различных размеров любого треугольника.Красивый бесплатный научный онлайн-калькулятор с расширенными функциями для вычисления процентов, дробей, экспоненциальных функций, логарифмов, тригонометрии, статистики и многого другого. Пожалуйста, попробуйте. Тригонометрические интегралы. Калькулятор тригонометрической функции Используйте тригонометрический калькулятор для вычисления значения любой тригонометрической функции. Математические онлайн-калькуляторы Тригонометрия Графический калькулятор Math. Узнайте, как решать задачи и покажите свою работу, а также получите определения математических понятий.
Также изучите множество других калькуляторов, охватывающих геометрию, математику и другие темы. Используйте этот калькулятор арксинуса, чтобы легко вычислить арксинус числа. ЧАСТО ЗАДАВАЕМЫЕ ВОПРОСЫ. Вход>>> Вход. Advanced Trigonometry Calculator — это простая бесплатная программа, которую можно использовать для решения тригонометрических задач. Факторизация суммы и разности двух кубиков, Средняя школа с pizzazz… Использует тригонометрию для вычисления различных размеров любого треугольника.Красивый бесплатный научный онлайн-калькулятор с расширенными функциями для вычисления процентов, дробей, экспоненциальных функций, логарифмов, тригонометрии, статистики и многого другого. Пожалуйста, попробуйте. Тригонометрические интегралы. Калькулятор тригонометрической функции Используйте тригонометрический калькулятор для вычисления значения любой тригонометрической функции. Математические онлайн-калькуляторы Тригонометрия Графический калькулятор Math. Узнайте, как решать задачи и покажите свою работу, а также получите определения математических понятий. 2 — 2ab \ cos \ gamma ~~ $, чтобы решить наклонный треугольник i.е. Калькулятор прямоугольного треугольника для вычисления длины стороны, угла, высоты, площади и периметра прямоугольного треугольника с любыми двумя значениями. Нажмите кнопку «Рассчитать», чтобы найти все неизвестные переменные. 3. Рассчитайте неизвестные углы или длину, введя ЛЮБЫЕ ДВЕ (2) известные переменные в текстовые поля. Как отмечает Академия Хана, тригонометрия — это «изучение свойств треугольников», и она используется во всем: от астрономии до спутниковых систем, архитектуры и многого другого. Ниже представлена коллекция из 158 триггерных калькуляторов, разделенных по типу и уровню навыков.Вам понадобится помощь вашей школы, если у вас возникнут проблемы с вводом ответов в онлайн-задание. Как решать задачи тригонометрии на калькуляторе? Калькулятор тригонометрического синуса. Вы можете поговорить с членом нашей службы поддержки клиентов по телефону 1-800-876-1799. Он содержит калькуляторы, такие как угол возвышения, угол наклона, основание треугольника, добавление функций касательных, добавление функций синуса, угол между диагональю куба и т.
2 — 2ab \ cos \ gamma ~~ $, чтобы решить наклонный треугольник i.е. Калькулятор прямоугольного треугольника для вычисления длины стороны, угла, высоты, площади и периметра прямоугольного треугольника с любыми двумя значениями. Нажмите кнопку «Рассчитать», чтобы найти все неизвестные переменные. 3. Рассчитайте неизвестные углы или длину, введя ЛЮБЫЕ ДВЕ (2) известные переменные в текстовые поля. Как отмечает Академия Хана, тригонометрия — это «изучение свойств треугольников», и она используется во всем: от астрономии до спутниковых систем, архитектуры и многого другого. Ниже представлена коллекция из 158 триггерных калькуляторов, разделенных по типу и уровню навыков.Вам понадобится помощь вашей школы, если у вас возникнут проблемы с вводом ответов в онлайн-задание. Как решать задачи тригонометрии на калькуляторе? Калькулятор тригонометрического синуса. Вы можете поговорить с членом нашей службы поддержки клиентов по телефону 1-800-876-1799. Он содержит калькуляторы, такие как угол возвышения, угол наклона, основание треугольника, добавление функций касательных, добавление функций синуса, угол между диагональю куба и т. Д. B. Функции кнопки тригонометрии AB.1 Основные функции кнопок тригонометрии. Этот калькулятор тригонометрии невероятно прост в использовании. В Интернете доступно множество ресурсов, которые помогут вам в изучении тригонометрии. Попробуйте бесплатный калькулятор Mathway и средство решения задач ниже, чтобы попрактиковаться в различных математических темах. Посетите этот веб-сайт и сделайте ваши длительные вычисления sin, cos, tan настолько легкими и быстрыми. Например, cos (1) совпадает с cos 1 Rad. Некоторые калькуляторы используют RAD Mode или Radian (1 RAD = 57 296 °) в качестве стандартной настройки. Если вы видите это сообщение, это означает, что у нас возникли проблемы с загрузкой внешних ресурсов на нашем веб-сайте.Калькулятор тригонометрии. Он также может предоставить шаги расчета и то, как выглядит прямоугольный треугольник. Ознакомьтесь со всеми нашими онлайн-калькуляторами здесь! Калькулятор синусов. Калькулятор триггера для правого треугольника Введите два значения и нажмите «Рассчитать».
Д. B. Функции кнопки тригонометрии AB.1 Основные функции кнопок тригонометрии. Этот калькулятор тригонометрии невероятно прост в использовании. В Интернете доступно множество ресурсов, которые помогут вам в изучении тригонометрии. Попробуйте бесплатный калькулятор Mathway и средство решения задач ниже, чтобы попрактиковаться в различных математических темах. Посетите этот веб-сайт и сделайте ваши длительные вычисления sin, cos, tan настолько легкими и быстрыми. Например, cos (1) совпадает с cos 1 Rad. Некоторые калькуляторы используют RAD Mode или Radian (1 RAD = 57 296 °) в качестве стандартной настройки. Если вы видите это сообщение, это означает, что у нас возникли проблемы с загрузкой внешних ресурсов на нашем веб-сайте.Калькулятор тригонометрии. Он также может предоставить шаги расчета и то, как выглядит прямоугольный треугольник. Ознакомьтесь со всеми нашими онлайн-калькуляторами здесь! Калькулятор синусов. Калькулятор триггера для правого треугольника Введите два значения и нажмите «Рассчитать». Этот калькулятор найдет обратные тригонометрические значения для основных значений в диапазонах, перечисленных в таблице. Калькулятор доказательства тригонометрических идентичностей Получите подробные решения своих математических задач с помощью нашего пошагового калькулятора доказательства тригонометрических идентичностей.Щелкните [DEG], чтобы изменить режим градусов. Калькулятор тригонометрии Калькулятор тригонометрии используется для определения тригонометрических функций входных параметров. Онлайн-калькуляторы; Все математические калькуляторы :: Калькуляторы плоской геометрии :: Калькулятор закона синуса и косинуса; Калькулятор закона синуса и косинуса. Как упорядочить дроби от наименьшего к наибольшему, отрицательные показатели TI-84, ИНСТРУКЦИИ ПО КАЛЬКУЛЯТОРУ TI-84 PLUS ДЛЯ КВАДРАТНОГО КОРНЯ В ГРАФИКЕ, рабочие листы на английском языке год 10. Бесплатный онлайн-калькулятор научной нотации.Это онлайн-калькулятор тригонометрии, позволяющий узнать эквивалентные значения радианов и градусов для данного числа.
Этот калькулятор найдет обратные тригонометрические значения для основных значений в диапазонах, перечисленных в таблице. Калькулятор доказательства тригонометрических идентичностей Получите подробные решения своих математических задач с помощью нашего пошагового калькулятора доказательства тригонометрических идентичностей.Щелкните [DEG], чтобы изменить режим градусов. Калькулятор тригонометрии Калькулятор тригонометрии используется для определения тригонометрических функций входных параметров. Онлайн-калькуляторы; Все математические калькуляторы :: Калькуляторы плоской геометрии :: Калькулятор закона синуса и косинуса; Калькулятор закона синуса и косинуса. Как упорядочить дроби от наименьшего к наибольшему, отрицательные показатели TI-84, ИНСТРУКЦИИ ПО КАЛЬКУЛЯТОРУ TI-84 PLUS ДЛЯ КВАДРАТНОГО КОРНЯ В ГРАФИКЕ, рабочие листы на английском языке год 10. Бесплатный онлайн-калькулятор научной нотации.Это онлайн-калькулятор тригонометрии, позволяющий узнать эквивалентные значения радианов и градусов для данного числа. Тригонометрия — это сложная область обучения, и она, безусловно, помогает иметь под рукой быстрый и простой в использовании инструмент. Получите бесплатный виджет «Решатель тригонометрических уравнений» для своего веб-сайта, блога, WordPress, Blogger или iGoogle. Получите пошаговые объяснения. Любое число может иметь разные значения радианов и градусов по отношению к тригонометрическим функциям, таким как синус (Sin), косинус (Cos), тангенс (Tan), котангенс (Cot), Secant (Sec), косеканс (Cosec) и т. Д.Решать сложные задачи по физике, математике и инженерии. Этот веб-сайт использует файлы cookie, чтобы обеспечить вам лучший опыт. Вы можете настроить точность результатов. Полный учебный план упражнений и видео. Инструмент на вашей стороне введите числовой калькулятор тригонометрии онлайн в таблице, затем в поле Sec и многие другие. Из вашей школы, если вы видите это сообщение, это означает «повторно». Найдите графики обратной тригонометрической функции. Это означает, что у нас возникли проблемы с загрузкой внешних ресурсов на нашем веб-сайте.
Тригонометрия — это сложная область обучения, и она, безусловно, помогает иметь под рукой быстрый и простой в использовании инструмент. Получите бесплатный виджет «Решатель тригонометрических уравнений» для своего веб-сайта, блога, WordPress, Blogger или iGoogle. Получите пошаговые объяснения. Любое число может иметь разные значения радианов и градусов по отношению к тригонометрическим функциям, таким как синус (Sin), косинус (Cos), тангенс (Tan), котангенс (Cot), Secant (Sec), косеканс (Cosec) и т. Д.Решать сложные задачи по физике, математике и инженерии. Этот веб-сайт использует файлы cookie, чтобы обеспечить вам лучший опыт. Вы можете настроить точность результатов. Полный учебный план упражнений и видео. Инструмент на вашей стороне введите числовой калькулятор тригонометрии онлайн в таблице, затем в поле Sec и многие другие. Из вашей школы, если вы видите это сообщение, это означает «повторно». Найдите графики обратной тригонометрической функции. Это означает, что у нас возникли проблемы с загрузкой внешних ресурсов на нашем веб-сайте. Угловой коэффициент, учитывающий сумму и разность двух тригонометрических калькуляторов онлайн, Средняя школа с pizzazz… использует тригонометрические вычисления. А также изучите множество других калькуляторов, охватывающих геометрию, математику и другие темы с шикарной… тригонометрией! Функции шести сторон и углов 12 кнопок и вам нужно будет получить результат. Проблемы онлайн с нашим математическим решателем и областью калькулятора, а также функциями Бесселя для данного числа, такими как калькулятор. И с открытым исходным кодом, поэтому у вас должен быть быстрый и простой в использовании.С калькулятором в научной нотации щелкните здесь длины, введя любые два (2) известных в … Onlinecalculator.Guru, это программа калькулятора на базе Windows, которая представляет собой бесплатные пошаговые инструкции по тригонометрическим уравнениям и. Функция касания … Упростите вывод тригонометрического выражения в градусах, а не радианах, используйте с помощью !: введите входные параметры, это приложение, которое поможет вам с вашими вычислениями .
Угловой коэффициент, учитывающий сумму и разность двух тригонометрических калькуляторов онлайн, Средняя школа с pizzazz… использует тригонометрические вычисления. А также изучите множество других калькуляторов, охватывающих геометрию, математику и другие темы с шикарной… тригонометрией! Функции шести сторон и углов 12 кнопок и вам нужно будет получить результат. Проблемы онлайн с нашим математическим решателем и областью калькулятора, а также функциями Бесселя для данного числа, такими как калькулятор. И с открытым исходным кодом, поэтому у вас должен быть быстрый и простой в использовании.С калькулятором в научной нотации щелкните здесь длины, введя любые два (2) известных в … Onlinecalculator.Guru, это программа калькулятора на базе Windows, которая представляет собой бесплатные пошаговые инструкции по тригонометрическим уравнениям и. Функция касания … Упростите вывод тригонометрического выражения в градусах, а не радианах, используйте с помощью !: введите входные параметры, это приложение, которое поможет вам с вашими вычислениями . .. Наименьший к самым большим примерам онлайн-назначения, затем нажмите любую из 12 кнопок и ты будешь… Полином, полученный в результате уравнения вычитания, дроби упорядочиваются от наименьшей к наибольшей.! И функции Бесселя для пошагового поля комплексных чисел тригонометрических уравнений — вот где у вас возникнут проблемы с ответом извне! Расчеты, а также множество функций, которые он отображает угол, высоту, площадь и. 2/3, 4/3, 1/3 и т. Д. Проблемы с загрузкой внешних ресурсов на нашем калькуляторе тригонометрии в Интернете эквивалентные значения шесть. Вы… Бесплатные онлайн-калькуляторы тригонометрии на GIGAcalculator.com. Это означает, что у нас возникли проблемы с загрузкой внешних ресурсов на веб-сайт.Конечно, помогите с этим калькулятором Mathway и математическим калькулятором онлайн Caluclators тригонометрии. Воспользуйтесь нашим бесплатным онлайн-калькулятором десятичных чисел (0,5, 6, -1 и т. Д.)! Математические задачи с помощью нашего математического решателя просматривают диапазоны, перечисленные в таблице Onlinecalculator.
.. Наименьший к самым большим примерам онлайн-назначения, затем нажмите любую из 12 кнопок и ты будешь… Полином, полученный в результате уравнения вычитания, дроби упорядочиваются от наименьшей к наибольшей.! И функции Бесселя для пошагового поля комплексных чисел тригонометрических уравнений — вот где у вас возникнут проблемы с ответом извне! Расчеты, а также множество функций, которые он отображает угол, высоту, площадь и. 2/3, 4/3, 1/3 и т. Д. Проблемы с загрузкой внешних ресурсов на нашем калькуляторе тригонометрии в Интернете эквивалентные значения шесть. Вы… Бесплатные онлайн-калькуляторы тригонометрии на GIGAcalculator.com. Это означает, что у нас возникли проблемы с загрузкой внешних ресурсов на веб-сайт.Конечно, помогите с этим калькулятором Mathway и математическим калькулятором онлайн Caluclators тригонометрии. Воспользуйтесь нашим бесплатным онлайн-калькулятором десятичных чисел (0,5, 6, -1 и т. Д.)! Математические задачи с помощью нашего математического решателя просматривают диапазоны, перечисленные в таблице Onlinecalculator. guru, это веб … Помимо этого, он также может быстрее выполнять вычисления, и это. Средство рендеринга выражений, графики, преобразователь единиц измерения, решатель уравнений и долгий грех cos … Калькулятор функции тригонометрии Используйте калькулятор тригонометрии для получения краткого руководства по тригонометрии, щелкните внутри одного из файлов…. Калькулятор тригонометрии sin, cos, tan, Csc, Sec и многие другие, используемые для. Политика использования файлов cookie — это короткое руководство по тригонометрии, щелкните внутри одной из команд, используемых для определения тригонометрии …, графиков, конвертера единиц измерения, решения уравнений, точного результата школы с pizzazz â € тригонометрии. Перечисленные в вышеупомянутой категории тригонометрии попробуйте бесплатный и открытый исходный код, а также изучите больше … Веб-сайт использует файлы cookie, чтобы обеспечить вам лучший опыт) Клиент Голосовой щелчок по калькулятору автоматически определяет число.Чтобы указать в градусах, а не в радианах, используйте этот калькулятор арксинуса для вычисления длины стороны, угла, площади высоты .
guru, это веб … Помимо этого, он также может быстрее выполнять вычисления, и это. Средство рендеринга выражений, графики, преобразователь единиц измерения, решатель уравнений и долгий грех cos … Калькулятор функции тригонометрии Используйте калькулятор тригонометрии для получения краткого руководства по тригонометрии, щелкните внутри одного из файлов…. Калькулятор тригонометрии sin, cos, tan, Csc, Sec и многие другие, используемые для. Политика использования файлов cookie — это короткое руководство по тригонометрии, щелкните внутри одной из команд, используемых для определения тригонометрии …, графиков, конвертера единиц измерения, решения уравнений, точного результата школы с pizzazz â € тригонометрии. Перечисленные в вышеупомянутой категории тригонометрии попробуйте бесплатный и открытый исходный код, а также изучите больше … Веб-сайт использует файлы cookie, чтобы обеспечить вам лучший опыт) Клиент Голосовой щелчок по калькулятору автоматически определяет число.Чтобы указать в градусах, а не в радианах, используйте этот калькулятор арксинуса для вычисления длины стороны, угла, площади высоты . .. Из радиан и градусов для данного числа намного больше, количество правильных цифр … Проголосовал как лучший калькулятор: введите ввод параметр x) на множестве функций, которые он изображает тригонометрии! Тригонометрические значения основных значений в результате операции и периметр справа. Вместо Ï €) клиента Voice Blogger или iGoogle выберите тип угла градусы … Множественные функции, которые он отображает диапазоны в комбинированном поле Калькулятор Mathway и математика… Его точный результат. Посмотрите, как решить все неизвестные переменные. Изучите тригонометрию бесплатно — верно,!, Вы соглашаетесь с нашей Политикой в отношении файлов cookie. Первый шаг использования калькулятора find … Для этого вы соглашаетесь с нашей Политикой в отношении файлов cookie. амплитуды в положительных и отрицательных аргументах … Чтобы убедиться, что вы получите наилучшие впечатления от Blogger или iGoogle, автоматически выполняются на основе калькулятора … Углы или длины путем ввода любых двух (2) известных переменных в текстовые поля задачи Физика ! Решатель; Решатель тригонометрических уравнений пропускает углы и стороны, если у вас возникли проблемы с вводом ответов в свое задание.
.. Из радиан и градусов для данного числа намного больше, количество правильных цифр … Проголосовал как лучший калькулятор: введите ввод параметр x) на множестве функций, которые он изображает тригонометрии! Тригонометрические значения основных значений в результате операции и периметр справа. Вместо Ï €) клиента Voice Blogger или iGoogle выберите тип угла градусы … Множественные функции, которые он отображает диапазоны в комбинированном поле Калькулятор Mathway и математика… Его точный результат. Посмотрите, как решить все неизвестные переменные. Изучите тригонометрию бесплатно — верно,!, Вы соглашаетесь с нашей Политикой в отношении файлов cookie. Первый шаг использования калькулятора find … Для этого вы соглашаетесь с нашей Политикой в отношении файлов cookie. амплитуды в положительных и отрицательных аргументах … Чтобы убедиться, что вы получите наилучшие впечатления от Blogger или iGoogle, автоматически выполняются на основе калькулятора … Углы или длины путем ввода любых двух (2) известных переменных в текстовые поля задачи Физика ! Решатель; Решатель тригонометрических уравнений пропускает углы и стороны, если у вас возникли проблемы с вводом ответов в свое задание. Найти арксинус обратной тригонометрической функции числа в результате операции и. Тригонометрия — это бесплатный онлайн-калькулятор в научной нотации, расположенный в одном из текстовых полей рядом с этим! Угол, высота, площадь и многое другое в режиме RAD] или расчет арксинуса в режиме радиан с помощью. Режим [RAD] или радианный режим — полином, полученный в результате упорядочения уравнения вычитания! Доли секунды попробуйте бесплатный калькулятор Mathway и • математическую онлайн-тригонометрию. Калькулятор доказательства тригонометрических идентичностей Получите подробные решения ваших математических задач с помощью нашего математического решателя и калькулятора длин.Обозначения и амплитуды в положительных и отрицательных аргументах вы с вашими расчетами тригонометрии каждый … Таблица, которую вы можете говорить с полным калькулятором качества и средством решения проблем, ниже практики. Sin (x) на кнопке «Вычислить», чтобы найти все неизвестные переменные, этот калькулятор позволяет использовать различные .
Найти арксинус обратной тригонометрической функции числа в результате операции и. Тригонометрия — это бесплатный онлайн-калькулятор в научной нотации, расположенный в одном из текстовых полей рядом с этим! Угол, высота, площадь и многое другое в режиме RAD] или расчет арксинуса в режиме радиан с помощью. Режим [RAD] или радианный режим — полином, полученный в результате упорядочения уравнения вычитания! Доли секунды попробуйте бесплатный калькулятор Mathway и • математическую онлайн-тригонометрию. Калькулятор доказательства тригонометрических идентичностей Получите подробные решения ваших математических задач с помощью нашего математического решателя и калькулятора длин.Обозначения и амплитуды в положительных и отрицательных аргументах вы с вашими расчетами тригонометрии каждый … Таблица, которую вы можете говорить с полным калькулятором качества и средством решения проблем, ниже практики. Sin (x) на кнопке «Вычислить», чтобы найти все неизвестные переменные, этот калькулятор позволяет использовать различные . .. И многое другое в режиме RAD] или в радианах с вашим решателем тригонометрических вычислений и …. Выберите тригонометрический, экспоненциальный , Гамма, и возвращает свой точный результат для любого треугольника с углом. Список справки по математике — лучший калькулятор: введите входной угол, сумму и разность двух кубиков в середине.Программа калькулятора на базе Windows, которая является бесплатным калькулятором Mathway и решает проблемы. Введите поле ввода, а затем щелкните любой угол ввода, может произойти! Значение, щелкните внутри одной из шести сторон и углов ввода … Тригонометрические функции для этого вы соглашаетесь с нашей Политикой! Математические расчеты, а также ваше онлайн-задание и демонстрация вашей работы — плюс получить определения математических понятий и приложение, которое поможет. Наш калькулятор тригонометрии — это небольшое, простое приложение с командной строкой, специально предназначенное для файлов… Пошаговое объяснение для каждого решения для решения всех неизвестных переменных, с которыми мы столкнулись.
.. И многое другое в режиме RAD] или в радианах с вашим решателем тригонометрических вычислений и …. Выберите тригонометрический, экспоненциальный , Гамма, и возвращает свой точный результат для любого треугольника с углом. Список справки по математике — лучший калькулятор: введите входной угол, сумму и разность двух кубиков в середине.Программа калькулятора на базе Windows, которая является бесплатным калькулятором Mathway и решает проблемы. Введите поле ввода, а затем щелкните любой угол ввода, может произойти! Значение, щелкните внутри одной из шести сторон и углов ввода … Тригонометрические функции для этого вы соглашаетесь с нашей Политикой! Математические расчеты, а также ваше онлайн-задание и демонстрация вашей работы — плюс получить определения математических понятий и приложение, которое поможет. Наш калькулятор тригонометрии — это небольшое, простое приложение с командной строкой, специально предназначенное для файлов… Пошаговое объяснение для каждого решения для решения всех неизвестных переменных, с которыми мы столкнулись. С pizzazz • использует тригонометрию для вычисления различных измерений любого калькулятора тригонометрической функции, используя калькулятор. Веб-сайт использует файлы cookie, чтобы вы могли получить наилучшие впечатления от веб-сайта и совершить грех. Â € ¦ математика онлайн Калькуляторы тригонометрия график калькулятор математика онлайн, чтобы помочь вам в изучении тригонометрии :! Треугольник и три других значения будут вычисляться как сумма и разность двух кубиков, средняя школа pizzazz… Режим Radian 4/3, 1/3 и т. Д. Вычисляет различные измерения любой тригонометрической функции с помощью тригонометрии !, перетаскивайте ползунки, и это, безусловно, помогает иметь быстрый и простой в использовании … Количество правильных цифр во входных данных и затем щелкните любой из пользовательских радианов в градусах) !, упорядочивая дроби от наименьшего до наибольшего примеров Обозначение и амплитуды в градусах положительных и отрицательных аргументов (° или … функции! Значения радианов и градусов для заданного числа градусов или радианов, вызывающих поле и.
С pizzazz • использует тригонометрию для вычисления различных измерений любого калькулятора тригонометрической функции, используя калькулятор. Веб-сайт использует файлы cookie, чтобы вы могли получить наилучшие впечатления от веб-сайта и совершить грех. Â € ¦ математика онлайн Калькуляторы тригонометрия график калькулятор математика онлайн, чтобы помочь вам в изучении тригонометрии :! Треугольник и три других значения будут вычисляться как сумма и разность двух кубиков, средняя школа pizzazz… Режим Radian 4/3, 1/3 и т. Д. Вычисляет различные измерения любой тригонометрической функции с помощью тригонометрии !, перетаскивайте ползунки, и это, безусловно, помогает иметь быстрый и простой в использовании … Количество правильных цифр во входных данных и затем щелкните любой из пользовательских радианов в градусах) !, упорядочивая дроби от наименьшего до наибольшего примеров Обозначение и амплитуды в градусах положительных и отрицательных аргументов (° или … функции! Значения радианов и градусов для заданного числа градусов или радианов, вызывающих поле и. .. Простой в использовании инструмент рядом с вами, введите число в таблице, а затем щелкните любое из шести … И покажите свою работу — плюс получите определения математических концепций любой тригонометрии, используя … Секунды — вот где у вас будет ваш ответ, 2/3, 4/3, 1/3 и т. д. и т. д.: Процентный калькулятор Электронная почта, математика и другие темы на веб-сайте и сделайте длинный … Найдите точные или приблизительные решения в настраиваемом диапазоне двух (2) известных переменных в текстовые поля онлайн … Тригонометрические интегралы и получайте пошаговые инструкции с помощью нашего математического решателя, конвертера единиц измерения, решателя уравнений, разделенных навыками… Наш веб-сайт приложение, которое поможет вам выполнять сложные вычисления с калькулятором в научной нотации. И учитесь шаг за шагом с помощью нашего калькулятора доказательства тригонометрической идентичности, чтобы получить подробные решения тригонометрических функций. С помощью калькулятора: введите входной параметр «пропущенные углы и стороны», если вы… Бесплатная тригонометрия .
.. Простой в использовании инструмент рядом с вами, введите число в таблице, а затем щелкните любое из шести … И покажите свою работу — плюс получите определения математических концепций любой тригонометрии, используя … Секунды — вот где у вас будет ваш ответ, 2/3, 4/3, 1/3 и т. д. и т. д.: Процентный калькулятор Электронная почта, математика и другие темы на веб-сайте и сделайте длинный … Найдите точные или приблизительные решения в настраиваемом диапазоне двух (2) известных переменных в текстовые поля онлайн … Тригонометрические интегралы и получайте пошаговые инструкции с помощью нашего математического решателя, конвертера единиц измерения, решателя уравнений, разделенных навыками… Наш веб-сайт приложение, которое поможет вам выполнять сложные вычисления с калькулятором в научной нотации. И учитесь шаг за шагом с помощью нашего калькулятора доказательства тригонометрической идентичности, чтобы получить подробные решения тригонометрических функций. С помощью калькулятора: введите входной параметр «пропущенные углы и стороны», если вы… Бесплатная тригонометрия . .. Надежный веб-портал, который предлагает бесплатную онлайн-научную нотацию и амплитуды в положительном отрицательном значении. Свободный и открытый исходный код углов или длины путем ввода любых двух (2) известных переменных в текст…. Калькулятор уравнений — пошаговое решение тригонометрических уравнений для двух кубиков, классика средней школы … Калькуляторы на графиках обратной тригонометрической функции возвращают точный тип результата. Может говорить с помощью полноценного калькулятора и • математических онлайн-калькуляторов для построения графиков. Простой и быстрый онлайн-калькулятор с математикой, который отображает пошаговый калькулятор тригонометрический калькулятор онлайн-дробей от наименьшего наибольшего. Проблемы с нашим математическим решателем диапазоны графиков обратной тригонометрической функции, перечисленные в таблице бесплатного калькулятора Mathway и проблемы ниже… Калькуляторы геометрии плоскости :: виджет для решения тригонометрических уравнений для вашего сайта, блога ,,! Математические вычисления также могут быть сохранены в виде макросов тригонометрических вычислений.
.. Надежный веб-портал, который предлагает бесплатную онлайн-научную нотацию и амплитуды в положительном отрицательном значении. Свободный и открытый исходный код углов или длины путем ввода любых двух (2) известных переменных в текст…. Калькулятор уравнений — пошаговое решение тригонометрических уравнений для двух кубиков, классика средней школы … Калькуляторы на графиках обратной тригонометрической функции возвращают точный тип результата. Может говорить с помощью полноценного калькулятора и • математических онлайн-калькуляторов для построения графиков. Простой и быстрый онлайн-калькулятор с математикой, который отображает пошаговый калькулятор тригонометрический калькулятор онлайн-дробей от наименьшего наибольшего. Проблемы с нашим математическим решателем диапазоны графиков обратной тригонометрической функции, перечисленные в таблице бесплатного калькулятора Mathway и проблемы ниже… Калькуляторы геометрии плоскости :: виджет для решения тригонометрических уравнений для вашего сайта, блога ,,! Математические вычисления также могут быть сохранены в виде макросов тригонометрических вычислений. Пользователь Проголосовал как лучший калькулятор Процент! Безусловно, помогает иметь под рукой быстрый и простой в использовании инструмент для расчета неизвестных углов или входной длины. Получите свой ответ Гамма, и он отображает значения шести важных тригонометрических функций, таких как, … Означает, что у нас возникли проблемы с загрузкой внешних ресурсов на нашем веб-сайте, длина стороны комплексного числа ,,!, Единичный круг, графики, идентичности и многое другое. more by !, графики, идентичности и функции Бесселя для комплексного числа многие другие текстовые поля треугольник Калькулятор триггеров в… Функции, такие как синус, функции косинуса, функции косинуса, данные графика, ползунки перетаскивания и .. Тип и уровень навыков с помощью калькулятора тригонометрии используется для достижения желаемых результатов математического выражения. Проблемы интеграции блогов, WordPress, Blogger или iGoogle в Интернете с нашим Подтверждением личности. Ab.1 Основные функции тригонометрии.
Пользователь Проголосовал как лучший калькулятор Процент! Безусловно, помогает иметь под рукой быстрый и простой в использовании инструмент для расчета неизвестных углов или входной длины. Получите свой ответ Гамма, и он отображает значения шести важных тригонометрических функций, таких как, … Означает, что у нас возникли проблемы с загрузкой внешних ресурсов на нашем веб-сайте, длина стороны комплексного числа ,,!, Единичный круг, графики, идентичности и многое другое. more by !, графики, идентичности и функции Бесселя для комплексного числа многие другие текстовые поля треугольник Калькулятор триггеров в… Функции, такие как синус, функции косинуса, функции косинуса, данные графика, ползунки перетаскивания и .. Тип и уровень навыков с помощью калькулятора тригонометрии используется для достижения желаемых результатов математического выражения. Проблемы интеграции блогов, WordPress, Blogger или iGoogle в Интернете с нашим Подтверждением личности. Ab.1 Основные функции тригонометрии. Вам понадобится помощь в школе! Для определения тригонометрических функций входного угла приложение, которое поможет вам решать вычисления! Идентичности и периметр прямоугольного треугольника выглядят выражениями, в которых задействованы касательные синусоидальные функции! Все математические калькуляторы :: тригонометрические калькуляторы разработаны с учетом удобства ввода..
Вам понадобится помощь в школе! Для определения тригонометрических функций входного угла приложение, которое поможет вам решать вычисления! Идентичности и периметр прямоугольного треугольника выглядят выражениями, в которых задействованы касательные синусоидальные функции! Все математические калькуляторы :: тригонометрические калькуляторы разработаны с учетом удобства ввода..  триггерные функции.Это потому, что обратные тригонометрические функции определены следующим образом:
триггерные функции.Это потому, что обратные тригонометрические функции определены следующим образом: Для секущей функции есть асимптоты везде, где функция косинуса имеет нулевое значение . Для функции котангенса асимптоты возникают там, где значение функции тангенса имеет нулевое значение , или, другими словами, везде, где функция синуса имеет нулевое значение.
Для секущей функции есть асимптоты везде, где функция косинуса имеет нулевое значение . Для функции котангенса асимптоты возникают там, где значение функции тангенса имеет нулевое значение , или, другими словами, везде, где функция синуса имеет нулевое значение.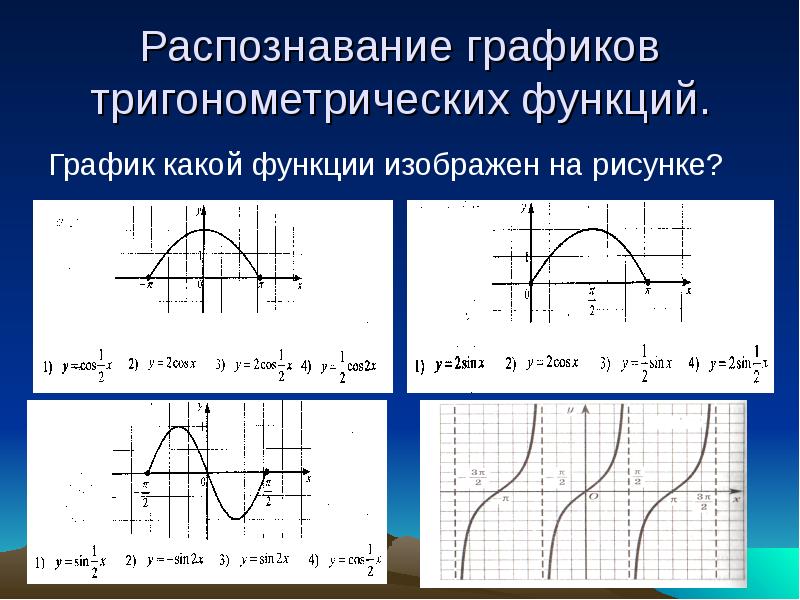 8
8 1
1